REDES MULTIPLEXADAS AUTOMÓVILES

CAN-bus
LIN-bus
MOST-bus
ADAS
1
Aritz Bellido

CAN-bus
LIN-bus
MOST-bus
Las redes multiplexadas son sistemas de transmisión de datos que permiten enviar múltiples señales o mensajes a través de un solo canal de comunicación En el caso del CAN-bus, se trata de una red multiplexada utilizada comúnmente en la industria automotriz para conectar diferentes dispositivos electrónicos dentro de un vehículo, como el motor, los frenos, los sistemas de seguridad, entre otros
El CAN-bus (Controller Area Network) es una tecnología de red desarrollada en los años 80 por la empresa alemana Bosch, y desde entonces se ha convertido en un estándar global en la industria automotriz y en otros sectores que requieren comunicación de datos en tiempo real y de alta fiabilidad.
El CAN-bus utiliza un protocolo de comunicación robusto y eficiente que permite la transmisión de datos a alta velocidad y con un alto nivel de tolerancia a fallos Además, permite la conexión de múltiples dispositivos en una red distribuida, lo que lo hace ideal para aplicaciones en las que se requiere una alta interoperabilidad y una gestión eficiente de los recursos de la red
Los sistemas de transmisión de datos y las redes multiplexadas como el CAN-bus han revolucionado la forma en que se comunican los dispositivos electrónicos en diferentes industrias, permitiendo una mayor eficiencia y flexibilidad en la gestión de los recursos y las aplicaciones
El CAN-bus (Controller Area Network) es una tecnología de red multiplexada que tiene varias ventajas en comparación con otros sistemas de transmisión de datos:
- Alta velocidad de transmisión de datos: el CAN-bus es capaz de transmitir datos a velocidades de hasta 1 Mbit/s, lo que lo hace adecuado para aplicaciones que requieren una comunicación rápida y en tiempo real
- Tolerancia a fallos: el CAN-bus utiliza un protocolo de comunicación robusto que permite la detección y corrección de errores en la transmisión de datos, lo que lo hace adecuado para aplicaciones críticas en las que la fiabilidad es fundamental.
- Bajo consumo de energía: el CAN-bus consume muy poca energía en comparación con otros sistemas de transmisión de datos, lo que lo hace adecuado para aplicaciones en las que se requiere una larga duración de la batería
- Flexibilidad y escalabilidad: el CAN-bus es una red distribuida que permite la conexión de múltiples dispositivos y su fácil integración en diferentes aplicaciones, lo que lo hace adecuado para una amplia variedad de aplicaciones y sistemas
- Costo reducido: el CAN-bus es relativamente económico en comparación con otros sistemas de transmisión de datos, lo que lo hace adecuado para aplicaciones en las que se requiere una solución de bajo costo.
En resumen, el CAN-bus es una tecnología de red multiplexada con varias ventajas que lo hacen adecuado para aplicaciones en diferentes industrias, como la automotriz, la de automatización industrial, la de transporte y la de energía.
El principio de transmisión de datos se refiere al proceso de enviar información de un dispositivo a otro a través de un canal de comunicación, como una red de computadoras o un medio físico, como un cable o una onda electromagnética El proceso de transmisión de datos consta de tres elementos clave: el transmisor, el canal y el receptor.
El transmisor es el dispositivo que envía la información o los datos. La información se codifica en una señal eléctrica o electromagnética y se envía a través del canal de comunicación. El canal de comunicación puede ser alámbrico, como un cable de cobre, o inalámbrico, como el espectro electromagnético
El receptor es el dispositivo que recibe la información o los datos y los descodifica para su uso En algunos casos, puede ser necesario que la información sea amplificada o procesada antes de ser utilizada
El proceso de transmisión de datos puede verse afectado por diversas interferencias, como el ruido eléctrico, las interferencias electromagnéticas o la atenuación de la señal Por lo tanto, es importante utilizar técnicas de codificación y modulación de señales adecuadas para garantizar que la información llegue al receptor de manera precisa y confiable

Un sistema CAN-bus (Controller Area Network) consta de varios componentes clave que trabajan juntos para permitir la comunicación entre los diferentes dispositivos en una red Estos componentes son:
CONTROLADOR CAN: es el componente central del sistema CAN-bus El controlador CAN es un chip especializado que se encarga de administrar la comunicación en la red, controlar la transmisión de datos y garantizar la integridad de la información
TRANSCEPTORES CAN: son componentes que permiten la conexión física de los dispositivos a la red CAN-bus. Los transceptores se encargan de la conversión de la señal eléctrica a una señal compatible con la red CAN-bus
NODO O DISPOSITIVO CAN: es cualquier dispositivo que esté conectado a la red CAN-bus, como sensores, actuadores, unidades de control, etc Los dispositivos se comunican con otros dispositivos en la red mediante la transmisión de mensajes
CABLEADO: el cableado es el medio físico que conecta los dispositivos de la red El cableado puede ser de cobre o fibra óptica, dependiendo de los requisitos de la aplicación
TERMINADORES: son componentes que se utilizan en los extremos del cableado para garantizar que la señal se refleje adecuadamente y no cause interferencia electromagnética.
SOFTWARE: se utiliza para programar y configurar los dispositivos en la red CAN-bus, así como para recopilar y analizar los datos que se transmiten en la red
En un sistema CAN-bus, la información se transmite mediante mensajes CAN, que consisten en bits que se organizan en un formato específico La representación CAN-bus utiliza dos formatos de trama principales: la trama de datos (data frame) y la trama remota (remote frame)
La trama de datos (data frame) se utiliza para enviar datos de un nodo a otro en la red CAN-bus. La trama de datos consta de los siguientes campos:
- Encabezado de trama (header): es un campo de 11 bits que incluye el identificador de mensaje (ID) y otros bits de control, como la longitud de los datos y la prioridad
- Datos (data): este campo puede contener de 0 a 8 bytes de información
- CRC (código de redundancia cíclica): es un campo de 15 bits que se utiliza para detectar errores de transmisión
- End of Frame (EOF): es un campo de 7 bits que indica el final de la trama
La trama remota (remote frame) se utiliza para solicitar datos de un nodo en la red CAN-bus. La trama remota consta de los siguientes campos:
- Encabezado de trama (header): es un campo de 11 bits que incluye el ID y otros bits de control.
- RTR (bit de trama remota): es un bit que se establece en 1 para indicar que se trata de una trama remota.
- CRC (código de redundancia cíclica): es un campo de 15 bits que se utiliza para detectar errores de transmisión.
- End of Frame (EOF): es un campo de 7 bits que indica el final de la trama
Aunque el sistema CAN-bus (Controller Area Network) es muy fiable, como cualquier tecnología, también puede experimentar fallos. Algunos de los fallos más comunes que se pueden producir en un sistema CAN-bus son:
Errores de transmisión: pueden ocurrir debido a interferencias electromagnéticas, problemas de conexión en el cableado, mala calidad de los transceptores, problemas de configuración del software, entre otros Los errores de transmisión pueden provocar la pérdida o corrupción de datos en la red CAN-bus
Problemas de alimentación eléctrica: los nodos de la red CAN-bus necesitan una fuente de alimentación estable para funcionar correctamente Si hay problemas con la alimentación eléctrica, como fluctuaciones de voltaje o interrupciones, pueden surgir fallos en el sistema
Fallos de hardware: los componentes del sistema CAN-bus pueden fallar debido al desgaste, defectos de fabricación, exposición a condiciones ambientales adversas, etc. Esto puede afectar el rendimiento y la fiabilidad del sistema
Fallos de software: el software que se utiliza para programar y configurar los dispositivos en la red CAN-bus también puede tener errores o fallas Esto puede afectar la comunicación y el funcionamiento de los dispositivos en la red
Para minimizar los fallos en un sistema CAN-bus, es importante realizar un mantenimiento regular del sistema, asegurarse de que todos los componentes estén correctamente instalados y configurados, y utilizar componentes de alta calidad y de marcas reconocidas. También es importante realizar pruebas regulares para detectar y solucionar cualquier problema antes de que se convierta en un fallo crítico.
El sistema LIN-bus (Local Interconnect Network) es una red de comunicación serial que se utiliza en aplicaciones de automoción y de automatización industrial para conectar dispositivos electrónicos de bajo costo y bajo consumo de energía El objetivo del sistema LIN-bus es proporcionar una solución de bajo costo para sistemas de comunicación de bajo nivel que no requieren una velocidad de transmisión de datos muy alta
El sistema LIN-bus utiliza un solo cable para la comunicación, lo que lo hace económico y fácil de instalar. La velocidad de transmisión de datos del sistema LIN-bus es de hasta 20 kbps, lo que lo hace adecuado para aplicaciones que requieren una baja tasa de transferencia de datos
La arquitectura del sistema LIN-bus es una topología en bus, donde todos los dispositivos están conectados en serie al mismo cable de comunicación El sistema LIN-bus utiliza un esquema de maestro-esclavo, donde un maestro controla la comunicación entre los dispositivos esclavos en la red.
El sistema LIN-bus también tiene algunas características únicas, como la capacidad de enviar y recibir datos con un solo cable y la capacidad de administrar el suministro de energía de los dispositivos conectados a la red.
En otras palabras, el sistema LIN-bus es una solución de bajo costo para sistemas de comunicación de baja velocidad que se utiliza en aplicaciones de automoción y automatización industrial. Su arquitectura en bus, su velocidad de transmisión de datos y su esquema de maestro-esclavo lo hacen adecuado para aplicaciones específicas que requieren una baja tasa de transferencia de datos
Algunas de las ventajas del sistema LIN-bus (Local Interconnect Network) son:
- Bajo costo: El sistema LIN-bus se diseñó para ser una solución de comunicación económica Es ideal para aplicaciones que requieren una baja velocidad de transmisión de datos y no tienen necesidades de alta velocidad y gran capacidad de procesamiento Esto se traduce en costos más bajos para los componentes, la instalación y la integración del sistema.
- Fácil de instalar: Debido a que el sistema LIN-bus utiliza un solo cable para la comunicación y su arquitectura es en bus, es fácil de instalar y conectar los dispositivos electrónicos La instalación del sistema es sencilla y rápida, lo que reduce el tiempo y los costos de instalación y puesta en marcha
- Consumo de energía bajo: El sistema LIN-bus está diseñado para dispositivos electrónicos de baja potencia, lo que significa que los dispositivos que se conectan a la red no requieren una gran cantidad de energía para funcionar Esto tiene como resultado un menor consumo de energía y una mayor eficiencia energética del sistema.
- Funciones de diagnóstico: El sistema LIN-bus incluye funciones de diagnóstico que permiten la detección y solución de problemas de comunicación en la red. Las funciones de diagnóstico ayudan a identificar rápidamente los problemas en el sistema y reducen el tiempo y los costos de mantenimiento y reparación.
- Flexibilidad: El sistema LIN-bus es altamente flexible y se puede utilizar en una amplia variedad de aplicaciones de automoción y automatización industrial. Además, el sistema LIN-bus es compatible con otros sistemas de comunicación, lo que permite su integración con otros sistemas de la red.
El principio de transmisión de datos del sistema LIN-bus (Local Interconnect Network) se basa en la comunicación serie de datos a través de un solo cable. El sistema LIN-bus utiliza una topología en bus, en la que varios dispositivos están conectados en serie al mismo cable de comunicación.
El sistema LIN-bus utiliza una transmisión asincrónica, lo que significa que la comunicación de datos no está sincronizada con una señal de reloj maestro En su lugar, los datos se transmiten en paquetes que contienen un bit de inicio, los datos en sí y un bit de parada Los paquetes de datos se transmiten en un formato de trama, que incluye también un bit de paridad para detectar errores de transmisión
El sistema LIN-bus utiliza un esquema de maestro-esclavo, donde un maestro controla la comunicación entre los dispositivos esclavos en la red El maestro inicia la comunicación enviando un mensaje a uno o varios dispositivos esclavos, que luego responden con sus propios mensajes.
El sistema LIN-bus también utiliza una técnica de multiplexación de tiempo para permitir que varios dispositivos compartan el mismo cable de comunicación. Cada dispositivo en la red tiene un identificador único, que se utiliza para determinar cuál dispositivo puede transmitir datos en cualquier momento dado
Los componentes básicos de un sistema de LIN-bus (Local Interconnect Network) son los siguientes:
- ECU (Electronic Control Unit) Maestro: Es el dispositivo maestro de la red, que controla y dirige la comunicación con los dispositivos esclavos. El ECU maestro es responsable de enviar los mensajes y recibir las respuestas de los dispositivos esclavos.
- ECU Esclavos: Son los dispositivos que reciben los mensajes del ECU maestro y envían respuestas en función de las solicitudes del maestro Los dispositivos esclavos pueden ser sensores, actuadores o cualquier otro dispositivo que necesite comunicarse con el ECU maestro
- Bus LIN: Es el medio físico de transmisión de datos, que conecta todos los dispositivos en la red El bus LIN es un único cable en el que se transmiten los datos en serie, utilizando una técnica de multiplexación de tiempo.
- Regulador de tensión: Es un componente que regula la tensión del bus LIN, para garantizar que todos los dispositivos de la red funcionen con la misma tensión y para protegerlos de sobretensiones o cortocircuitos
- Circuitos de protección: Son dispositivos que protegen la red LIN de cortocircuitos y sobretensiones, evitando daños a los dispositivos conectados
- Resistencia de terminación: Es una resistencia que se conecta al final del bus LIN, para garantizar una correcta terminación de la señal y evitar reflexiones
La representación física del bus LIN (Local Interconnect Network) es un único cable que conecta todos los dispositivos de la red. La señal se transmite en serie a través del cable LIN, utilizando una técnica de multiplexación de tiempo
La señal del bus LIN consta de un conjunto de bits que se organizan en tramas Cada trama comienza con un bit de inicio, seguido de un byte de identificación de trama (TID), que indica el tipo de trama que se está transmitiendo El byte TID se utiliza para identificar la dirección del dispositivo receptor y el tipo de mensaje que se está transmitiendo
A continuación del byte TID, se transmiten los datos en sí La longitud de los datos puede variar entre 2 y 8 bytes, dependiendo del tipo de trama que se esté transmitiendo. Los datos se transmiten en orden de byte menos significativo a byte más significativo
Después de los datos, se transmite un byte de paridad, que se utiliza para comprobar si se ha producido algún error en la transmisión de datos. Finalmente, se envía un bit de parada para indicar el final de la trama
La velocidad de transmisión de datos en un bus LIN puede variar entre 1 2 kbps y 20 kbps, dependiendo de la aplicación y del diseño del sistema La velocidad de transmisión se ajusta para garantizar una comunicación estable y fiable entre los dispositivos de la red
Algunos de los fallos comunes que pueden ocurrir en un sistema de bus LIN (Local Interconnect Network) son los siguientes:
- Error de conexión: Puede haber problemas de conexión en el bus LIN debido a una mala conexión en los conectores o a una conexión floja en los dispositivos de la red
Esto puede provocar errores en la transmisión de datos o incluso la desconexión de algunos dispositivos de la red
- Ruido electromagnético: El ruido electromagnético puede afectar la señal del bus
LIN y provocar errores de transmisión de datos El ruido electromagnético puede ser causado por fuentes externas como motores, transformadores o dispositivos electrónicos cercanos.

- Problemas de alimentación: Los problemas de alimentación, como fluctuaciones de voltaje o sobretensiones, pueden afectar el correcto funcionamiento del bus LIN y provocar errores en la transmisión de datos
- Fallos en el software: El software que controla el sistema de bus LIN puede tener errores o problemas de configuración que afecten el correcto funcionamiento del sistema Estos fallos pueden ser causados por una mala programación o por problemas en la configuración del sistema
- Cortocircuitos: Los cortocircuitos pueden ocurrir en cualquier punto de la red LIN y provocar problemas de comunicación. Si un dispositivo de la red tiene un cortocircuito, puede afectar la comunicación de los dispositivos conectados en la red
Para solucionar estos problemas, se pueden realizar diversas acciones como revisar la conexión de los dispositivos y los conectores, utilizar componentes de protección y reguladores de tensión adecuados, y hacer una revisión del software y la configuración del sistema. También se pueden utilizar herramientas de diagnóstico para identificar y solucionar los problemas en la red LIN
MOST (Media Oriented Systems Transport) es un sistema de bus utilizado en la industria automotriz para la transmisión de datos multimedia en alta calidad, como audio, video y datos de navegación El sistema fue desarrollado por una asociación de empresas automotrices y de tecnología.
El bus MOST se basa en una arquitectura de fibra óptica que permite una transmisión de datos de alta velocidad y sin interferencias electromagnéticas El sistema está diseñado para permitir la conexión de múltiples dispositivos en una red, incluyendo unidades de control de audio, navegación y entretenimiento
El sistema MOST consta de tres componentes principales: el controlador de la red, el transceptor óptico y los dispositivos terminales El controlador de la red es el encargado de administrar la red y la comunicación entre los dispositivos terminales El transceptor óptico es el encargado de convertir la señal eléctrica en señal óptica para su transmisión a través de la fibra óptica. Los dispositivos terminales son los dispositivos conectados a la red, como reproductores de audio y navegación
Una de las principales ventajas del sistema MOST es su capacidad para transmitir datos de alta calidad a largas distancias sin degradación de la señal. Además, la fibra óptica utilizada en el sistema es inmune a las interferencias electromagnéticas, lo que mejora la fiabilidad y la calidad de la señal de audio y video.
En definitiva, el sistema MOST es un sistema de bus utilizado en la industria automotriz para la transmisión de datos multimedia en alta calidad, como audio, video y datos de navegación El sistema se basa en una arquitectura de fibra óptica que permite una transmisión de datos de alta velocidad y sin interferencias electromagnéticas El sistema consta de un controlador de red, un transceptor óptico y dispositivos terminales
El sistema MOST (Media Oriented Systems Transport) es capaz de transmitir datos multimedia en alta calidad, como audio, video y datos de navegación a una velocidad de hasta 150 Mbps Esta alta velocidad de transmisión permite una reproducción sin interrupciones de contenido multimedia en los sistemas de entretenimiento para automóviles Además, el uso de fibra óptica en el sistema permite una transmisión de datos
de alta velocidad y sin interferencias electromagnéticas, lo que mejora la calidad de la señal y la fiabilidad de la comunicación de datos.
Los componentes principales del sistema MOST-bus (Media Oriented Systems Transport) son:
- Fuente de datos: Es el dispositivo que genera los datos multimedia, como un reproductor de DVD, un sistema de navegación o una unidad de radio.

- Unidad óptica: Es el dispositivo que lee los datos de un disco óptico, como un CD o un DVD, y los convierte en datos digitales para su transmisión.
- Controlador de red: Es el dispositivo que gestiona el tráfico de datos en el bus MOST, y se encarga de la sincronización de los diferentes dispositivos conectados a la red
- Procesador de señal digital (DSP): Es el componente que procesa los datos multimedia para su transmisión a través del bus MOST
- Transceptor: Es el dispositivo que se encarga de la conversión de la señal digital en una señal óptica, y viceversa
- Fibra óptica: Es el medio de transmisión utilizado por el bus MOST para la comunicación de datos. La fibra óptica es capaz de transmitir grandes cantidades de datos a una alta velocidad, y además, es resistente a las interferencias electromagnéticas.
- Dispositivos de usuario: Son los dispositivos que reciben los datos multimedia transmitidos a través del bus MOST, como pantallas, altavoces, etc.
Los sistemas de ayuda y asistencia a la conducción son sistemas diseñados para ayudar al conductor en la tarea de conducir, mejorando la seguridad y comodidad en la carretera. Algunos de los sistemas más comunes son:
REGULACIÓN DE VELOCIDAD ACTIVA (ACC): Este sistema utiliza sensores para detectar la distancia al vehículo que circula delante y ajusta automáticamente la velocidad del vehículo para mantener una distancia de seguridad






REGULADOR Y LIMITADOR DE VELOCIDAD: este sistema consta de dos funciones principales: el regulador de velocidad y el limitador de velocidad El regulador de velocidad permite al conductor establecer una velocidad deseada y mantener esa velocidad sin tener que mantener constantemente el pie en el acelerador. El limitador de velocidad, por otro lado, permite al conductor establecer una velocidad máxima para el vehículo Cuando se activa el limitador de velocidad, el vehículo no puede superar la velocidad máxima establecida, independientemente de cuánto se pise el acelerador
SISTEMA DE PREVENCIÓN DE COLISIÓN Y ATROPELLO: Esta función detecta la presencia de vehículos o objetos en el camino y advierte al conductor mediante señales visuales o auditivas si hay riesgo de colisión.
ALERTA DE CAMBIO INVOLUNTARIO DE CARRIL: Este sistema utiliza una cámara para detectar las líneas de carril y ayuda al conductor a mantener el vehículo en el carril correcto, emitiendo una alerta si se detecta que el vehículo se sale del carril.
FRENADO AUTOMÁTICO DE EMERGENCIA: Este sistema detecta situaciones de emergencia y frena automáticamente el vehículo para evitar o mitigar una colisión.
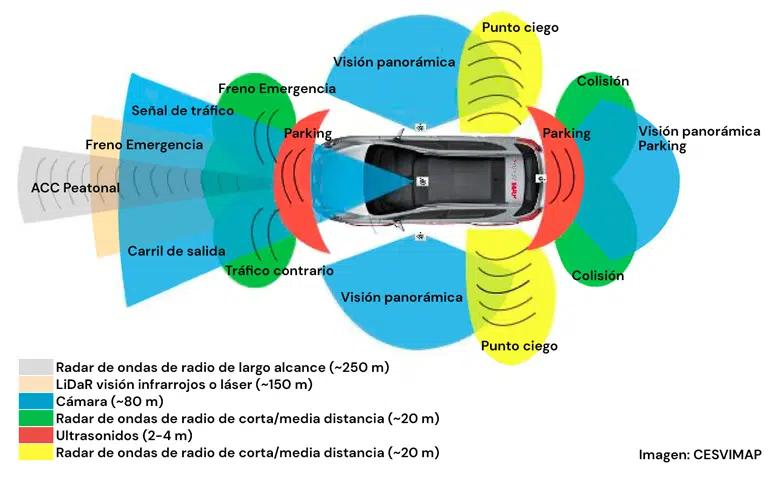


DETECTOR DE FATIGA: Este sistema monitorea el comportamiento del conductor para detectar signos de fatiga y alerta al conductor si se detecta un posible estado de somnolencia
SISTEMA DE ASISTENCIA AL APARCAMIENTO: Este sistema ayuda al conductor a estacionar el vehículo mediante la detección de obstáculos y la asistencia en la dirección
Estos sistemas de ayuda y asistencia a la conducción se están convirtiendo en una característica cada vez más común en los vehículos modernos, y se espera que evolucionen y mejoren en el futuro para aumentar aún más la seguridad y la comodidad en la carretera.
