
10 minute read
GND 11 IR

from remserv_072022
by borov665

Александр Ростов (г. Зеленоград)
Э л е к т р о н н ы й м о д у л ь M U 61 З А с т и р а л ь н ы х м аш ин B O SC H /SIE M E N S с и н в е р т о р н ы м у п р а в л е н и е м п р и в о д н о г о м о т о р а [часть 2)
Advertisement
Копирование, тиражирование и размещение данных материалов на Web-сайтах без письменного разрешения редакции преследуется в административном и уголовном порядке в соответствии с Законом РФ.
Продолжение. Начало в Р&С № 6, 2022 г.

Дополнительный источник питаний ИП2
ИП2 формирует напряжения +310V,+12V,+12Vkommh +3,3V(+3V3). Выходные напряжения источника гальванически развязаны от ИП1 и имеют один общий провод (GND).
Перечислим элементы и узлы, которые питаются от ИП2: - +310V — выходные каскады интеллектуального силового модуля IS 1101; - +12V — ключ Q17 управления реле К1701 и коммутатор + 12Vkomm (Q18, Q20); - + 1 2 V k o m m — датчик дисбаланса (3D); - +3V3 — IS1101, IS3101, сигнальные цепи (последовательный интерфейс и цепи,связанные с управлением приводным мотором).
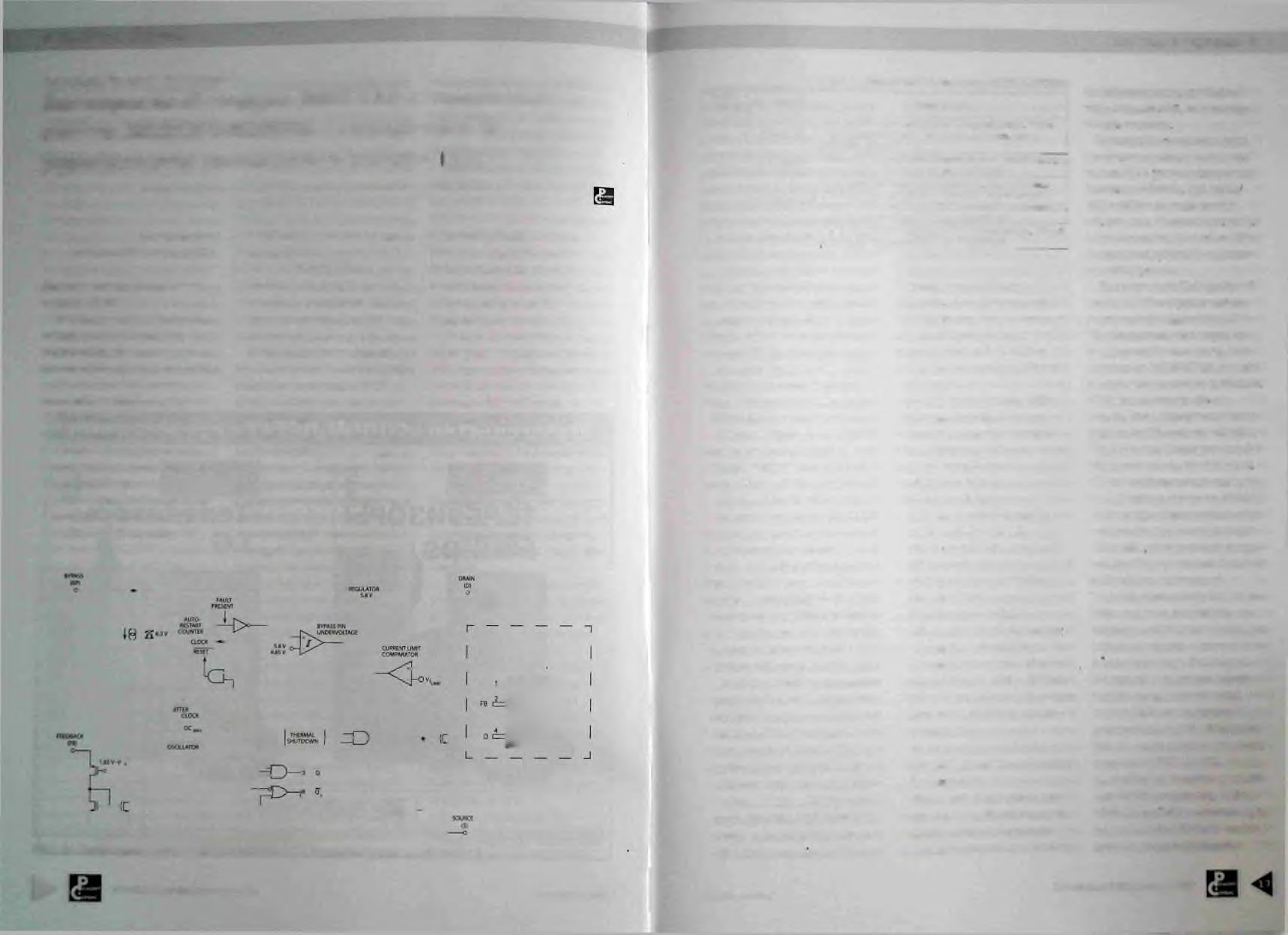
ИП2 представляет собой импульсный понижающий преобразователь, основой которого является ШИМ контроллер LNK304 фирмы Power Integrations со встроенным силовым MOSFET. ИМС относится к семейству LinkSwitch-TN и выполнена в корпусе SO-8.
Отличительные особенности ИМС: - интегрированные схемы защиты от короткого замы
кания (с автоматическим перезапуском) и от обрыва цепи обратной связи; - фиксированная рабочая частота преобразования 60 кГц; - высокое максимальное напряжение VDSS выходного ключевого транзистора (700 В); - высокий порог срабатывания термозащиты (+135 ’С); - ИМС питается непосредственно от высоковольтного вывода DRAIN, вследствие чего в ИП отпадает необходимость в отдельных цепях питания.
Структурная схема и расположение выводов ИМС LNK304
1 I I Г Т -П П
D □
SO-8C
bp t = ■ L is
3
■ о
LEADING EDGE BLANKING
Рис. 6. Структурная схема И М С LN K 304 (а) и располож ение ее выводов (б)
Таблица 4. Н азначение вы водов ИМ С LNK304
Н ом ер вывода Обозначение Назначение
5 DRAIN (D) Сток внутреннего сипового МОП транзистора Через этот вывод ИМС питается как при запуске так и в рабочем режиме
3 BYPASS (БР) Вывод для подключения блокировочного конденсатора внутреннего источника напряжения 5.8 В
4 FEEDBACK (FB)
Вход обратной связи по напряжению Данный вывод управляет состоянием силопого МОП транзистора в составе ИМС. Включение МОП транзистора проиг ходит если ток через вывод FB превышает 49 мкА 1.2, 7, 8 SOURCE (S) Исток внутреннего силового МОП транзистора обшии провод для выводов BYPASS и FEEDBACK
приведены на рис. 6, а назначение ее выводов — в таблице 4.
Перечислим основные компоненты ИП и их функциональное назначение: - цепь ограничения сетевого питания по току RV1; - сетевой выпрямитель (GR1401, С1408); - контроллер IS7101; - силовой дроссель импульсного преобразователя L1601; - выходной выпрямитель и фильтр (D13, С1603, Q13); - интегральный стабилизатор напряжения 3,3V U1; - элементы цепи обратной связи R46, R43, D11; - силовой дроссель L1401, выполняющий функции стабилизации тока и накопителя энергии при работе 3-фазного приводного мотора СМ, он же выполняет функцию пассивного корректора коэффициента мощности (ККМ); - реле К1701, шунтирующее термистор (PTC) М1400 при работе инвертора СМ (при переходе с малой мощности потребления ИП2 на высокую). Реле управляется через ключ Q17 с выв. 51
IS1101; - коммутатор питания +1 2V k o m m на датчик дисбаланса (подключен к соединителю Х1 1-ХЗ)выполнен на транзисторах Q 18, Q20 и управляется с выв. 1 IS1101
Примечание. Чтобы избежать разночтений. в данном описании и рисунках, питающие напряжения обозначаются следующим образом: - +310V — +310 В; - +12V — +12 В; - +12 V ko m m — + 12 В комм; - +3V3 — +3.3V, +3,3 В; - +9VDD — +9VDD; - +5V — +5 В; - +9V( 1 )комм — точка «В», +9 В(1 )комм;
- + 9 V (2 |ko m m — +9V; - +5V (1[iko m m — +5В(1)комм. - + 5 V (2 )k o m m — +5 В(2)комм.
Также общие шины, связанные с ИП1 - 0 V , ИП2 - GND ( с учетом вторичных цепей — ком мутаторов и стабилизаторов напряжений).
Организация схемы питания
в составе Э М
Выше уже отмечалось, что схема питания ЭМ состоит из двух ИП, в составе которых имеются не только импульсные преобразователи, стабилизаторы напряжении, но и коммутаторы питания
В исходном состоянии (при включении в сеть) включается только ИП 1 (он формирует напряжение +9VDD) МК, MCU/ DSC и ИП2 в данном случае обесточены. Питание поступает в данном случае только на ПУ и на вход коммутатора напряжения +9V( 1 )комм.
При переводе СМ в рабочий режим с ПУ поступает сигнал на контакт 3 соединителя X II- 12, вследствие чего через цепочку ключей включается коммутатор на MOSFET Q3 и на его выходе появляется напряжение +9V( 1 )комм (точка «В» на рис. 4). Это напряжение поступает на стабилизатор +5V (Q6. Q7, U 1) и вход коммутатора 04 (он пока закрыт). Напряжение +5V от стабилизатора поступает на микроконтроллерIS7001, на некоторые сигнальные цепи и на входы двух коммутаторов (Q1 и Q21 которые пока закрыты). Далее управление берет на себя МК, он активирует (выв. 35) коммутатор 04, на выходе которого появляется напряжение +9V( 1 )комм (+9V) для питания некоторых сигнальных и силовых цепей. После запуска программы стирки срабатывает силовая контактная группа УБЛ и напряжение
Lkom m поступает на ИП2 (пока только через ограничительный термистор РТС М 1400). На выходе ИП2 появляются напряжения +310V (инвертор), +12V и +3V3 (MCU/DSC и связанные с ним цепи). Для работы приводного мотора необходимо,

чтобы была замкнута силовая фуппа реле К1701 (шунтирует
РТС и управляется с выв. 51
IS1101). Далее МК и MCU/DSC обмениваются между собой данными по последовательному интерфейсу для обеспечения работы приводного мотора.
При необходимости в процессе работы СМ микроконтроллер и MCU/DSC могут активировать коммутаторы 01,
Q2 Q18, Q20, Q21 для формирования напряжений +5(1/2) комм и +12V kom m (питание цепей прессостата, датчиков температуры и дисбаланса (3D)). Из рабочего состояния
MKIS7001 может перевести
СМ в дежурный режим сигналами с выв. 33 и 34 (при условии, если сигнал с ПУ на включение с контакта 3 соединителя Х11-12 будет пассивным). В этом случае отключается основной коммутатор +9V( 1) комм на транзисторе Q3, а за ним и все остальные. В результате схема возвращается в исходное состояние — ИП1 работает, ИП2 отключен, все выходные напряжения источников, кроме +9VDD, отсутствуют. СМ находится в состоянии ожидания сигнала на включение с ПУ (см. выше). МК в данном случае уже не может перевести СМ в рабочий режим, так как сам обесточен — питающее напряжение +5V на него не поступает.
Примечание. В зависимости от режима работы СМ точность установки напряжений +310V, +721/, +12VkoMM составляет не более 10%.
Управление приводным мотором
В составе СМ используется 3-фазный бесколлекторный приводной мотор (англ. BLDC Brushless Direct Current Motor — бесщеточный мотор постоянного тока) с инверторным управлением. Общее управление режимами работы мотора (и инвертора) обеспечивает МК через MCU/DSC и интеллектуальный модуль IPM. Обратная связь о вращении вала мотора обеспечивается по принципу обратной ЭДС. Суть этого метода сводится к тому, что положение ротора определяется специальными цепями, контролирующими сигнал ЭДС на свободной фазе мотора (на которую в конкретный момент времени не подается управляющий сигнал). В данном случае уже не требуются традиционные системы с использованием тахогенератора (катушка) или датчиков Холла.
Примечание. В 3-фазных бесколлекторных моторах обратная ЭДС неподключенной фазы пересекает ноль при п е ресечении среднего значения положительного и отрицательного напряжений на других фазах. Пересечение ноля в о зникает всегда в центре меж ду двумя коммутациями. На постоянной или медленно изм еняю щейся скорости период врем ени от одной коммутации д о пе ресечения нуля и время от пересечения нуля д о следующ ей коммутации равны. Это используется в качестве основы для реализации устройства управления без использования датчиков. Д л я определения сигНа л ов обратной ЭД С использует] ся так назы ваем ая виртуальна средняя точка (на рис. 3 - 3Tq выв. 2 IS 3 101), дл я этого изм еряется напряж ение на свободной фазе, которое сравнивается со ср е д н е й точкой. При этом обычно используются аналоговые компараторы (также возм ож но пр и м е не ние АЦП). Компаратор может фиксировать преры вание в момент перехода напряж ения через среднюю точку. П одобное реш ение с компараторами и реализовано в рассмат риваемом ЭМ.
Применительно к рассматриваемому модулю в состав узла управления мотора входят МК IS7001 (общее управление), модуль IPM (выходные каскады и драйверы), MCU/DSC IS1101 (управление IPM), два компаратора из состава микросхемы IS3101 (контроль токов через выходные каскады инвертора и фиксация «перехода через ноль» цепей контроля вращения мотора по методу обратной ЭДС). Для обеспечения работы инвертора в ЭМ также используется накопительный дроссель L1401, который обеспечивает подавление паразитных высших гармоник, снижение влияния бросков тока на силовые цепи приводного мотора и уменьшение скорости нарастания токов короткого замыкания в выходных каскадах. Дроссель также выполняет функцию пас сивного ККМ.
IPM IRAM535-1065ASA представляет собой модуль, выпол ненный по гибридной техноло ГИИ (UMAX=600 В, 1^=10 А, F=20 кГц). В состав модуля входят выходные IGBT-каскады (3-канальный полумостовой усилитель), а также схемы управления и защиты. Модуль питается напряжениями +310V (выходные каскады) и +12V (+12...15V) (логические схемы). Он может принимать входные цифровые сигналы с активными уровнями 3 и 5 В.
MCU/DSC IS1101, применительно к функции управления приводным мотором,обеспечивает: - Формирование пар управляющих сигналов по каждому из 3-х каналов, поступающих на драйверы выходных каскадов в составеIPM.
Сигналы формируются по следующим цепям (без скобок — для каскадов IPM верхних плеч выходных каскадов (UP, VP, WP). а в скобках — каскадов нижних плеч (UN, VN, WN)): • выв. 61 (60) IS1101 - выв. 1 (4) IPM IS7103 (см. рис. 3, 4); • выв. 63 (62) IS1101 — выв. 2(5) IS7103; • выв. 3(2) IS1101 - выв. 3(6)
IPM IS7103. - Отключение при перегруз
ке по току ITRIP и ф ормирование сигнала ошибки
FO (Fault Output, ошибка выхода). К сожалению, документацию в свободном доступе на ИМС IRAM535- 1065ASA найти не удалось, поэтому неизвестно, к какому из двух выводов IPM относятся данные сигналы. Тем не менее, укажем эти цепи: • выв. 29 IS1101 — выв. 10
IS7103 (предположительно это цепь сигнала FO), • выв. 49 IS1101 — выв. 7
IS7103 <предположительно, это цепь сигнала ITRIP). - Контроль тока по падению напряжения на измерительных резисторах R53-R55, подключенных к эмиттерам
IGBT нижних плеч выходных каскадов в составе IPM (3 канала по количеству фаз) • выв. 23 IS7103 — выв. 23
IS1101. • выв. 24 IS7103 — выв. 17
IS1101 • выв. 25 IS7103 — выв. 14
IS1101. - Прием' сигналов с компараторов IS3101 для обработки фазовых сигналов и обеспечения контроля работы мотора по принципу обратной ЭДС (см. выше).
Сигнагы снимаются с вы в.23-25IS7103 и далее через измерительные резисторы и делители напряжения поступают на компараторы в составеIS3101 и далее на выв. 30 и выв. 48 IS1101. - Управление переключением реле К1701 (шунтирует термистор М 1400) для повышения мощности, отдаваемой в нагрузку ИП2.
Сигнал снимается с выв. 51
IS 1101 и через ключ 017 управляет реле К1701 - Контроль наличия сетево
го питания по линии Lk o m m
на входе ИП2. Сигнал снимается с выв. 3 выпрямителя
GR1401 и поступает по цепи:
R69, R78, R90 — выв. 24
IS1101. - Контроль напряжения питания +3J0V Напряжение +310V поступает на инверторные выходные каскады в составе IS7103 управления приводным мотором Сигнал снимается с «+« вывода диодного моста GR1400 и далее поступает по цепи
R75, R76 — выв. 28 IS1101
Обмен данными с М К по последовательному интерфейсу с МК. Необходимо отметить, что на MCU/DSC
IS1101 сигналы приема/ передачи (RX/TX) разделены, затем после оптронных развязок они смешиваются, опять разделяются и далее поступают на МК IS7001.
Укажем эти цепи. • прием (RX) (от МК к MCU/
DSC): выв 14 IS7001 — 1C 1 (выв. 2-4) — R101 — точка
«С- (смешивается с сигналом приема данных ТХ, эта 2-на- правленная шина еще называется D-BUS) — R36 — оптрон ОК8902 (сигнал разделен от RX) — выв. 58 IS 1101; • передача (ТХ) (от MCU/DSC к
МК): выв. 59IS1101 —
ОК8ЭОЗ — R41 — точка «С» (смешивается с сигналом приема данных RX (D-BUS)) — Q 1 9 -R 1 0 3 (сигнал разделен от RX) — в ы в.1 3 IS7001.
С точки «С» (в ней смешиваются данные RX/TX) 1 -проводная 2-направленная ш ина(D-
BUS) распределяется на другие источники (ПУ, модуль дозировки, прессостат, датчик загрузки) через соответствующие соединители. Оптроны ОК8902 и ОК8ЭОЗ необходимы для
