https://ebookmass.com/product/dsp-first-2nd-edition-ebookpdf/
Instant digital products (PDF, ePub, MOBI) ready for you
Download now and discover formats that fit your needs...
Emergency Medical Responder: First Responder in Action 2nd Edition, (Ebook PDF)
https://ebookmass.com/product/emergency-medical-responder-firstresponder-in-action-2nd-edition-ebook-pdf/
ebookmass.com
Data Science from Scratch: First Principles with Python 2nd Edition
https://ebookmass.com/product/data-science-from-scratch-firstprinciples-with-python-2nd-edition/
ebookmass.com
Introductory Chemistry: An Atoms First Approach 2nd Edition Julia Burdge
https://ebookmass.com/product/introductory-chemistry-an-atoms-firstapproach-2nd-edition-julia-burdge/
ebookmass.com
Junqueira’s Basic Histology Text and Atlas 14th Edition
Anthony L. Mescher
https://ebookmass.com/product/junqueiras-basic-histology-text-andatlas-14th-edition-anthony-l-mescher/
ebookmass.com
Métodos de investigación clínica y epidemiológica (Spanish Edition) Josep Maria Argimon Pallàs & Josep Jiménez Villa [Pallàs
https://ebookmass.com/product/metodos-de-investigacion-clinica-yepidemiologica-spanish-edition-josep-maria-argimon-pallas-josepjimenez-villa-pallas/ ebookmass.com
K IS FOR KARMA: The A, B, C's of Witchery (Moonbeam Chronicles Book 11) Carolina Mac
https://ebookmass.com/product/k-is-for-karma-the-a-b-cs-of-witcherymoonbeam-chronicles-book-11-carolina-mac/
ebookmass.com
Physiology E Book 6th Edition, (Ebook PDF)
https://ebookmass.com/product/physiology-e-book-6th-edition-ebook-pdf/
ebookmass.com
Birth Of The State: The Place Of The Body In Crafting
Modern Politics 1st Edition Edition Charlotte Epstein
https://ebookmass.com/product/birth-of-the-state-the-place-of-thebody-in-crafting-modern-politics-1st-edition-edition-charlotteepstein/ ebookmass.com
Wild Witches of Beaver Bay Kate Hill
https://ebookmass.com/product/wild-witches-of-beaver-bay-kate-hill/ ebookmass.com
https://ebookmass.com/product/xenes-2d-synthetic-materials-beyondgraphene-alessandro-molle/
ebookmass.com
DSPFirst SecondEdition JamesH.McClellan GeorgiaInstituteofTechnology
RonaldW.Schafer StanfordUniversity
MarkA.Yoder Rose-HulmanInstituteofTechnology
7-2PropertiesoftheDTFT
7-2.1LinearityProperty
7-2.2Time-DelayProperty
7-2.3Frequency-ShiftProperty
7-2.3.1DTFTofaFinite-Length ComplexExponential
7-2.3.2DTFTofaFinite-LengthReal CosineSignal
7-2.4ConvolutionandtheDTFT
7-2.4.1FilteringisConvolution
7-2.5EnergySpectrumandtheAutocorrelationFunction...257
7-2.5.1AutocorrelationFunction
7-3IdealFilters ............................259
7-3.1IdealLowpassFilter
7-3.2IdealHighpassFilter
7-3.3IdealBandpassFilter
7-4PracticalFIRFilters
7-4.1Windowing
7-4.2FilterDesign
7-4.2.1WindowtheIdealImpulseResponse
7-4.2.2FrequencyResponseofPractical Filters
7-4.2.3PassbandDefinedfortheFrequency Response
7-4.2.4StopbandDefinedfortheFrequency Response
7-4.2.5TransitionZoneoftheLPF ..........270
7-4.2.6SummaryofFilterSpecifications .......271
7-4.3GUIforFilterDesign
7-5TableofFourierTransformPropertiesandPairs
7-6SummaryandLinks
7-7Problems
8-1DiscreteFourierTransform(DFT) ................
8-1.1TheInverseDFT
8-1.2DFTPairsfromtheDTFT
8-1.2.2DFTofComplexExponential
8-1.3ComputingtheDFT
8-1.4MatrixFormoftheDFTandIDFT
8-2PropertiesoftheDFT
8-2.1DFTPeriodicityfor X [k ]
8-2.2NegativeFrequenciesandtheDFT
8-2.3ConjugateSymmetryoftheDFT
8-2.3.1Ambiguityat X [N/2]
8-2.4Frequency-DomainSamplingandInterpolation
8-2.5DFTofaRealCosineSignal
8-3InherentTime-DomainPeriodicityof x [n]
8-3.1DFTPeriodicityfor x [n]
8-3.2TheTimeDelayPropertyfortheDFT
8-3.2.1ZeroPadding
8-3.3TheConvolutionPropertyfortheDFT
8-4TableofDiscreteFourierTransformPropertiesandPairs
8-5SpectrumAnalysisofDiscretePeriodicSignals
8-5.1PeriodicDiscrete-TimeSignal:Discrete FourierSeries
8-5.2SamplingBandlimitedPeriodicSignals
8-5.3SpectrumAnalysisofPeriodicSignals ..........314
8-6Windows ..............................317
8-6.1DTFTofWindows
8-7TheSpectrogram
8-7.1AnIllustrativeExample
8-7.2Time-DependentDFT
8-7.3TheSpectrogramDisplay
8-7.4InterpretationoftheSpectrogram
8-7.4.1FrequencyResolution
8-7.5SpectrogramsinMATLAB
8-8TheFastFourierTransform(FFT)
8-8.1DerivationoftheFFT
8-8.1.1FFTOperationCount
8-9SummaryandLinks
8-10Problems
9-1Definitionofthe z-Transform
9-2Basic z-TransformProperties
9-2.1LinearityPropertyofthe z-Transform
9-2.2Time-DelayPropertyofthe z-Transform
9-2.3AGeneral z-TransformFormula
9-3The z-TransformandLinearSystems
9-3.1Unit-DelaySystem
9-3.2 z 1 NotationinBlockDiagrams
9-3.3The z-TransformofanFIRFilter
9-3.4 z-TransformoftheImpulseResponse
9-3.5Rootsofa z-TransformPolynomial
9-4Convolutionandthe z-Transform
9-4.1CascadingSystems
9-4.2Factoring z-Polynomials
9-4.3Deconvolution
9-5RelationshipBetweenthe z-Domainandthe ˆ
-Domain
9-5.1The z-PlaneandtheUnitCircle
9-5.2The z-TransformandtheDFT
9-6TheZerosandPolesof H(z)
9-6.1Pole-ZeroPlot
9-6.2SignificanceoftheZerosof H(z)
9-6.3NullingFilters
9-6.4GraphicalRelationBetween z and ˆ
9-6.5Three-DomainMovies
9-7SimpleFilters
9-7.1Generalizethe L-PointRunning-SumFilter
9-7.2AComplexBandpassFilter
9-7.3ABandpassFilterwithRealCoefficients
9-8PracticalBandpassFilterDesign
9-9PropertiesofLinear-PhaseFilters
9-9.1TheLinear-PhaseCondition
9-9.2LocationsoftheZerosofFIRLinearPhaseSystems
9-10SummaryandLinks
9-11Problems
10-1TheGeneralIIRDifferenceEquation
10-2Time-DomainResponse
10-2.1LinearityandTimeInvarianceofIIRFilters
10-2.2ImpulseResponseofaFirst-OrderIIRSystem
10-2.3ResponsetoFinite-LengthInputs
10-2.4StepResponseofaFirst-OrderRecursiveSystem...402 10-3SystemFunctionofanIIRFilter
10-3.1TheGeneralFirst-OrderCase ..............405 10-3.2 H(z) fromtheImpulseResponse
10-4TheSystemFunctionandBlockDiagramStructures
10-4.1DirectFormIStructure
10-4.2DirectFormIIStructure
10-4.3TheTransposedFormStructure
10-5PolesandZeros
10-5.1RootsinMATLAB
10-5.2PolesorZerosat z = 0or ∞
10-5.3OutputResponsefromPoleLocation
10-6StabilityofIIRSystems ......................416
10-6.1TheRegionofConvergenceandStability
10-7FrequencyResponseofanIIRFilter
10-7.1FrequencyResponseUsingMATLAB
10-7.2Three-DimensionalPlotofaSystemFunction
10-8ThreeDomains ..........................424 10-9TheInverse z-TransformandApplications
10-9.1RevisitingtheStepResponseofa First-OrderSystem
10-9.2AGeneralProcedureforInverse z-Transformation...429 10-10Steady-StateResponseandStability
10-11Second-OrderFilters
10-11.1 z-TransformofSecond-OrderFilters
10-11.2StructuresforSecond-OrderIIRSystems
10-11.3PolesandZeros
10-11.4ImpulseResponseofaSecond-OrderIIRSystem...440 10-11.4.1DistinctRealPoles
10-11.5ComplexPoles
10-12FrequencyResponseofSecond-OrderIIRFilter
10-12.1FrequencyResponseviaMATLAB
10-12.23-dBBandwidth
10-12.3Three-DimensionalPlotofaSystemFunction
10-12.4Pole-ZeroPlacingwiththe PeZ
10-13ExampleofanIIRLowpassFilter
10-14SummaryandLinks
10-15Problems
A-5.1GeometricViewofAddition
A-5.2GeometricViewofSubtraction
A-5.3GeometricViewofMultiplication
A-5.4GeometricViewofDivision
A-5.5GeometricViewoftheInverse, z 1
A-5.6GeometricViewoftheConjugate, z
A-6PowersandRoots
A-6.1RootsofUnity
A-6.1.1ProcedureforFindingMultipleRoots
A-7SummaryandLinks
B-1MATLABHelp ..........................
B-2MatrixOperationsandVariables
B-2.1TheColonOperator
B-2.2MatrixandArrayOperations
B-2.2.1AReviewofMatrixMultiplication
B-2.2.2PointwiseArrayOperations
B-3PlotsandGraphics
B-3.1FigureWindows
B-3.2MultiplePlots
B-3.3PrintingandSavingGraphics
B-4ProgrammingConstructs
B-4.1MATLABBuilt-InFunctions
B-4.2ProgramFlow
B-5MATLABScripts
B-6WritingaMATLABFunction
B-6.1CreatingaClipFunction
B-6.2DebuggingaMATLABM-file
B-7ProgrammingTips
B-7.1AvoidingLoops
B-7.2RepeatingRowsorColumns
B-7.3VectorizingLogicalOperations
B-7.4CreatinganImpulse
B-7.5TheFindFunction
B-7.6SeektoVectorize
B-7.7ProgrammingStyle
C-1FourierSeriesDerivation .....................
C-1.1FourierIntegralDerivation
C-2ExamplesofFourierAnalysis
C-2.1ThePulseWave
C-2.1.1SpectrumofaPulseWave
C-2.1.2FiniteSynthesisofaPulseWave
C-2.2TriangularWave
C-2.2.1SpectrumofaTriangularWave
C-2.2.2FiniteSynthesisofaTriangularWave
C-2.3Half-WaveRectifiedSine
C-2.3.1FiniteSynthesisofaHalf-Wave RectifiedSine
C-3OperationsonFourierSeries
C-3.1ScalingorAddingaConstant
C-3.2AddingSignals
C-3.3Time-ScalingProperty
C-3.4Time-ShiftingProperty
C-3.5DifferentiationProperty
C-3.6Frequency-ShiftingPropertyandMultiplying byaSinusoid
C-4AveragePower,Convergence,andOptimality
C-4.1DerivationofParseval’sTheorem
C-4.2ConvergenceofFourierSynthesis
C-4.3MinimumMean-SquareApproximation
C-5TheSpectruminPulsed-DopplerRadarWaveformDesign
C-5.1MeasuringRange
C-5.2MeasuringVelocityfromDopplerShift
C-5.3Pulsed-DopplerRadarWaveform
C-5.4MeasuringtheDopplerShift
C-6Problems
Preface Thisbook,entitledsimply DSPFirst,isthesecondeditionofthetext DSPFirst:A MultimediaApproach (1998)whichwaspackagedwithaCD-ROMthatprovidedmany resourcestoextendtheboundariesofatraditionaltextbook.In2003,asecondbook entitled SignalProcessingFirst wasproducedwithabroadersetoftopicsthatincluded fournewchaptersoncontinuous-timesignalprocessingandtheFouriertransform,aswell asupdatedversionsofthefirsteightchaptersof DSPFirst.Newmaterialwasproduced fortheCD-ROMbundledwiththe2003textbook,andallthesupportingresourceshave nowmovedtoawebsiteforeasieraccess.
ThesethreebooksandtheCompanionWebsitearetheresultofmorethan20years ofworkgroundedonthepremisethatdigitalsignalprocessing(DSP)isanidealstarting pointforthestudyofbothelectricalengineeringandcomputerengineering.Inthesummer of1993,twoofus(JHMcandRWS)begantodevelopaone-quartercoursethatwasto becometherequiredintroductorycourseforGeorgiaTechcomputerengineering(CmpE) students.Wearguedthatthesubjectofdigitalsignalprocessinghadeverythingwe wantedinafirstcourseforcomputerengineers:itintroducedthestudentstotheuse ofmathematicsasalanguageforthinkingaboutandsolvingengineeringproblems;it laidusefulgroundworkforsubsequentcourses;itmadeastrongconnectiontodigital computationasameansforimplementingsystems;anditprovidedthetoolstodiscuss interestingapplicationsthatwouldmotivatebeginningengineerstodothehardworkof connectingmathematicsandcomputationtoproblemsolving.Nothinghashappenedin
thepast22yearstochangeourmindsonthispoint.Indeed,ourteachingexperience withmorethan6,000studentsatGeorgiaTechhasonlystrengthenedourconvictionthat digitalsignalprocessing,distilledtoitsessence,isanidealintroductorysubjectfor both electricalandcomputerengineeringstudents.1 Infact,wehavebecomefirmlyconvinced thatacourseonDSPatthelevelofthistextshouldberequiredofeveryengineeringand computersciencestudent.
Fromthebeginning,webelievedthat“hands-on”experiencewithrealsignals wascrucial,soweexpendedconsiderableeffortondevelopingadditionalmaterialfor laboratoryexercisesandprojectsbasedonMATLAB.Inthelaboratoryassignments, studentscanexperiencetheeffectsofsignalprocessingoperationsthattheyhave implementedonsoundandimagesignals.Forexample,theycansynthesizemusicfrom sinusoids,buttheycanalsoseethatthosesamesinusoidsarethebasisforthewireless systemsthattheyuseroutinelytoaccesstheInternet.Theseexperiences,availableonthe CompanionWebsite,willaugmentandreinforcethemathematicalconceptsthatformthe basisofDSP.
Inadditiontothe25detailedlabassignments,theCompanionWebsiteincludes manyresourcesthatextendtheprintedtextbookwithmaterialsuchasdemonstrations andanimationsusedinclasses,andhundredsofsolvedhomeworkproblems.Theimpetus forhavingthiswebsitecamefromMarkYoderwho,in1995,whileonsabbaticalleaveat GeorgiaTechfromRose-Hulman,hadtheideatoputallofthismaterialintoaformthat otherteachers(andstudents)couldaccesseasily.InteractiveMATLABdemonstrations havebeencreatedfordemonstratingspecifictopicssuchasconvolutionandfrequency response,andmostofthesearenowusedasthebasisforsomeofthelaboratoryexercises. Asteachers,allthismaterialhaschangedthewaywepresentideas,becauseitexpands thewaystovisualizeaconcept“beyondtheequations.”Overtheyears,thecollection ofresourcesonourwebsitehascontinuedtogrow.Inthefuture,wewillexplorenew ideasforpresentingtheconceptsofDSP,andhopetomovebeyondtheprintedpagetoan e-Textversionthatwouldtrulyintegratethenarrativeofthebookwiththevisualizations ofthecompanionwebsite.
Thedistinguishingfeatureofthistext(anditsprogenitors)isthatitpresentssignal processingatalevelconsistentwithanintroductoryECEcourse,i.e.,thesophomore level(secondyear)inatypicalU.S.university.Thelistoftopicsinthebookisnot surprisinggivenitsemphasisondiscrete-timesignalprocessing,butsincewewanta coursethatisbroadlyaccessibletosophomores,wefeelthatwemustcombinesignal processingconceptswithsomeintroductoryideas.Partofthereasonforthisisthatin manyelectricalengineeringcurriculums,signalsandsystemsandDSPtypicallyhave beentreatedasjunior-andsenior-levelcourses,forwhichatraditionalbackgroundof
1 Inourdevelopmentoftheseideas,twobooksbyProfessorKenSteiglitzofPrincetonUniversityhada majorimpactonourthinking: AnIntroductiontoDiscreteSystems,JohnWiley&Sons,1972,and ADigital SignalProcessingPrimer:WithApplicationstoComputerMusic,Addison-WesleyPublishingCompany, 1996.Steiglitz’s1972bookwaswellaheadofitstime,sinceDSPhadfewpracticalapplications,andeven simplesimulationsonthen-availablebatchprocessingcomputersrequiredsignificantprogrammingeffort. However,by1993whenwebeganourwork,easy-to-usesoftwareenvironmentssuchasMATLABwere widelyavailableforimplementingDSPcomputationsonpowerfulpersonalcomputers.
linearcircuitsandlinearsystemsisassumed.Ourapproach,ontheotherhand,makes thesubjectmuchmoreaccessibletostudentsinothermajorssuchascomputerscience andotherengineeringfields.Thispointisincreasinglyimportantbecausenon-specialists needtouseDSPtechniquesroutinelyinmanyareasofscienceandtechnology.
ContentoftheNewEdition. Thisneweditionhasanorganizationsimilartothefirst editionof DSPFirst.Alookatthetableofcontentsshowsthatthebookbeginsvery simply(Chapter2)withadetaileddiscussionofcontinuous-timesinusoidalsignalsand theirrepresentationbycomplexexponentials.Thisisatopictraditionallyintroducedin alinearcircuitscourse,butincludingitheremakesitimmediatelyaccessiblefortherest ofthisbook,especiallyforstudentswhocomefromotherbackgrounds.Ifstudentshave alreadystudiedlinearcircuits,thischaptercanbeskipped,orrapidlycovered.Wethen proceedtointroducethespectrumconcept(Chapter3)byconsideringsumsofsinusoidal signals,culminatingwithabriefintroductiontoFourierseries.AlthoughChapter3of thefirsteditioncoveredthesamebasicideas,thischapterhassomenewmaterial.2
Nextwemakethetransitiontodiscrete-timesignalsbyconsideringsampled sinusoidalsignals(Chapter4).Wehavefoundthatitisnotnecessarytoinvokethe continuous-timeFouriertransformtomaketheimportantissuesinsamplingclear.All thatisneededisthesimpletrigonometricidentitycos(θ + 2π) = cos(θ).Infact,in Chapters2–4(withtheexceptionofFourierSeries),wehaveonlyneededtorelyonthe simplemathematicsofsineandcosinefunctions.Thebasiclinearsystemconceptsare thenintroducedwithrunningaveragesystemsandothersimpleFIRfilters(Chapter5). Impulsesequencesareintroducedwhichleadstotheimpulseresponsecharacterizinga filter.Convolutionistreatedasanumericaloperationinthefirstpassatthisidea.The keyconceptoffrequencyresponseisderivedandinterpretedforFIRfilters(Chapter6). Sinusoidsaretheprimarysignalsofinterest,andweemphasizethemagnitudeandphase changeexperiencedbyasinusoidwhenfilteredbyalineartime-invariantsystem.
Atthispointwedepartsignificantlyfromthefirsteditionbyintroducing(Chapter7) theconceptofdiscrete-timeFouriertransform(DTFT),whicharisesnaturallyfromthe frequencyresponseofadiscrete-timesystem.TheconceptoftheinverseDTFTcompletes thedescriptionofaninvertibletransformandalsoenablesustodescribeidealfilters.It isthennaturaltomovefromtheDTFTtothediscreteFouriertransform(DFT),which issimplyasampledversionoftheDTFTandthuscomputablethroughfastalgorithms thatarereadilyavailable(Chapter8).Chapters7and8arecompletelynew.Theyare aresponsetofrequentrequestsfromteacherswhowanttoexposetheirstudentstothe powerfulconceptoftheFouriertransform,andwehavefoundthatsophomoresarefully capableofunderstandingtheseconceptsandputtingthemtouse.Thesetwochaptersbring manyoftheideasofpracticalspectrumanalysisintofocuswiththegoalofprovidingthe knowledgetosuccessfullyemploythepowerfulspectrumanalysistoolsreadilyavailable insoftwareenvironmentssuchasMATLAB.
2 Furthermore,forinstructorswhoprefertodivedeeperintoFourieranalysisofperiodicsignals,Appendix ConFourierseriesisessentiallyanotherentirechapteronthattopic.
Finally,thelasttwochaptersreturntotheflowofthefirstedition.Weintroduce z-transforms(Chapter9)andIIRsystems(Chapter10).Atthisstage,astudentwho hasfaithfullyreadthetext,workedhomeworkproblems,anddonethelaboratory assignmentswillberewardedwiththeabilitytounderstandapplicationsinvolvingthe samplingtheorem,discrete-timefiltering,andspectrumanalysis.Furthermore,theyare wellpreparedtomoveontocoursesinlinearanalogcircuits,continuous-timesignalsand systems,andcontrolsystems.Allofthesecoursescanbuildonthefoundationestablished throughthestudyofthistext.
SummaryofWhat’sNewinThisEdition • NewmaterialontheDiscrete-TimeFourierTransform(DTFT)hasbeendeveloped andispresentedinChapter7.Thepresentationmakesaneasytransitionfromthe frequencyresponseconcepttobeginthestudyofthegeneralideaofaFourier transform.
• NewmaterialonidealfiltersanddigitalfilterdesignispresentedinChapter7asa veryusefulapplicationoftheDTFT.ThewindowmethodforFIRfilterdesignis presentedindetail.
• NewmaterialontheDiscreteFourierTransform(DFT)hasbeendevelopedandis presentedinChapter8.ThepresentationadoptsthepointofviewthattheDFTis asampledversionoftheDTFT,andalsodevelopstherelationshipoftheDFTto thediscreteFourierseries(DFS).
• Newmaterialonspectrumanalysisandthespectrogramhasbeendevelopedfor thelastsectionsofChapter8.Thisprovidesasolidfoundationforunderstanding time-frequencyanalysisofsignalsasiscommonlydonewiththeFFTalgorithm, aswellastheroleofwindowinginfrequencyresolution.
• Chapters7and8arederivedfromChapter9inthefirsteditionandChapter13 in SignalProcessingFirst.Thenewchaptersareasignificantrewritetomakethis materialaccessibleattheintroductorylevel.Thebenefitisthatstudentscanlearn theideasofpracticalspectrumanalysiswhichcanthenbereinforcedwithalab experiencewhereactualsignalsareprocessedwiththetoolsavailableinMATLAB.
• ThepresentationofthespectruminChapter3hasbeenexpandedtoincludeaformal discussionofpropertiesofthespectrum(e.g.,time-delay,frequencyshifting).This setsthestageforlaterdiscussionsoftheDTFTandDFT.
• ThematerialonFourierSerieswhichwaspartofChapter3hasbeenexpanded,but mostofitisnowplacedinAppendixC.Chapter3containsasufficientdescription oftheFourierseriestopresentthespectrumofoneperiodicsignal,thefullwave rectifiedsine.AppendixCprovidesanin-depthpresentationforinstructorswho choosetoemphasizethetopic.Detailsofotherperiodicsignals(squarewave, triangularwave,andhalf-waverectifiedsine)aregivenalongwithaderivation
ofParseval’stheoremandaheuristicdiscussionofconvergence.Propertiesofthe FourierSeriesarealsodeveloped.
• Extensivechangeshavebeenmadetotheend-of-chapterproblems.Therearea totalof241problemsinthebook:83arenew,86aredifferentfromthefirstedition byvirtueofchangingthedetails,and72arethesameasinthefirstedition.
• TheCompanionWebsitecontainsnewmaterialforlabs,MATLABvisualizations, andsolvedhomeworkproblems.TheCompanionWebsitemaybefoundat http://www.pearsonhighered.com/engineering-resources/.
AtGeorgiaTech,oursophomore-level,3creditcoursecoversmostofthecontentof Chapters2–10inaformatinvolvingtwoone-hourlectures,one1.5hourrecitation,and one1.5hourlaboratoryperiodperweek.Asmentionedpreviously,weplaceconsiderable emphasisonthelabbecausewebelievethatitisessentialformotivatingourstudents tolearnthemathematicsofsignalprocessing,andbecauseitintroducesourstudentsto theuseofpowerfulsoftwareinengineeringanalysisanddesign.AtRose-Hulman,we use DSPFirst inafreshman-level,10-weekcoursethatcoversChapters1–6,9,and10. TheRoseformatis3one-hourlecturesperweekandonethree-hourlab.Thestudents useMATLABthroughoutthecourse.Theentirecontentofthepresenttextwasusedby RWSfora10-week,fourcreditcourseatStanfordUniversity.Sincethiscoursefollowed quarter-longcoursesincontinuous-timesignalsandsystemsandlinearcircuits,itwas possibletoskipChapters2and3andmoveimmediatelyintoafocusondiscrete-time signalsandsystemsusingtheremainingchapters.Onecreditwasdevotedtoaweekly labassignmentwhichwasdoneindividuallywithoutaregularlyscheduledlaboratory period.
Theseexamplesfromourownteachingexperienceshowthatthetextanditsassociated supportingmaterialscanbeusedinmanydifferentwaysdependingoninstructor preferenceandnumberofcoursehours.Ascanbeseenfromthepreviousdiscussion, thesecondeditionof DSPFirst isnotaconventionalsignalsandsystemsbook.One differenceistheinclusionofasignificantamountofmaterialonsinusoidsandcomplex phasorrepresentations.Inatraditionalelectricalengineeringcurriculum,thesebasic notionsarecoveredundertheumbrellaoflinearcircuitstakenbeforestudyingsignals andsystems.Indeed,ourchoiceoftitleforthisbookandthefirsteditionisdesigned toemphasizethisdeparturefromtradition.Animportantpointisthatteachingsignal processingfirstalsoopensupnewapproachestoteachinglinearcircuits,sincethereis muchtobuilduponthatwillallowredirectedemphasisinthecircuitscourse.
Aseconddifferencefromconventionalsignalsandsystemstextsisthat DSPFirst emphasizestopicsthatrelyon“frequencydomain”concepts.Thismeansthat,in anelectricalengineeringcurriculum,topicslikeLaplacetransforms,statespace,and feedbackcontrol,wouldhavetobecoveredinlatercoursessuchaslinearcircuitsoran upper-levelcourseoncontrolsystems.Althoughourtexthasclearlybeenshapedbya specificpointofview,thisdoesnotmeanthatitandtheassociatedwebsitecanbeusedin onlyoneway.Indeed,asourownexperienceshows,byappropriateselectionoftopics,
ourtextcanbeusedforeitheraone-quarterorone-semestersignalsandsystemscourse thatemphasizescommunicationsandsignalprocessingapplicationsfromthefrequency domainpointofview.Formostelectricalengineeringcurricula,thecontrol-oriented topicswouldbecoveredinanothercourse.
Inotherdisciplinessuchascomputerscienceandcomputerengineering, DSPFirst emphasizesthosetopicsthataremostrelevanttocomputingforsignalanalysis.Thisis alsolikelytobetrueinotherengineeringfieldswheredataacquisitionandfrequency domainanalysisplayanimportantroleinmodernengineeringanalysisanddesign.
ThistextanditsCompanionWebsiterepresentsanuntoldamountofworkbythe threeauthors,numerouscolleagues,andmanystudents.Fortunately,wehavebeenable tomotivateanumberofextremelytalentedstudentstocontributeMATLABdemostothis project.Therearesomanythattonamethemallwouldbeimpractical.Wesimplythank themallfortheirvaluablecontributionstoourproject.GregKrudyszwhoauthored severalofthedemoshasnowtakenovertheprimaryroleofdevelopingnewdemos andvisualizationswithGUIsandupdatingtheexistingones.Sincethebeginningin 1993,manyprofessorshaveparticipatedinthesophomorecourseECE-2025(andnow ECE-2026)atGeorgiaTechaslecturersandrecitationinstructors.Onceagain,naming alltherecitationinstructorswouldbeimpractical,buttheircommentsandfeedbackhave givenlifetothecourseasitevolvedduringthepast12years.Forexample,Pamela BhattidevelopedalaboratoryonsimulatingthefilterbankofaCochlearImplanthearing system.Recently,thelecturingandadministrationofthecoursehasbeensharedby RussMersereau,FredJuang,ChinLee,ElliotMoore,MarkClements,ChrisRozell, G.K.Chang,DavidTaylor,DavidAnderson,JohnBarry,DougWilliams,andAaron Lanterman.Weareindebtedtothemfortheirmanysuggestionsthathavemadeapositive impactonthissecondedition,especiallythenewmaterialontheDFTandDTFT.We arealsoindebtedtoWaynePadgettandBruceBlack,whohavetaughtECE-380at Rose-Hulmanandhavecontributedmanygoodideas,andweappreciatetheworkof EdDoeringwhocreatedawholenewsetoflabsforECE-180,thenewfreshman-level DSPFirst.Theselabsstartwithtraditionalaudioprocessingandendwithvideoobject tracking.Anewfirstforfreshman.
WealsowanttoacknowledgethecontributionsofTomRobbins(formerlyatPearson Prentice-Hall)whowasanearlysupporterofoureffortstobringDSPtotheforein ECEeducation.Tomboughtintoourconceptof DSPFirst fromthebeginning,andhe encouragedusduringtheinitialproject,aswellasthe2003book.Morerecently,Andrew GilfillanandJulieBaihavebeentheeditorswhohelpedmakethissecondeditionareality. Finally,wewanttorecognizetheunderstandingandsupportofourwives(Carolyn McClellan,DorothySchafer,andSarahYoder).Carolyn’sphotoofthecatKilbyappears inChapter1.Theyhavepatientlysupportedusasthismulti-yearprojectcontinuedto consumeenergyandtimethatmighthavebeenspentwiththem.
1 Introduction Thisisabookaboutsignalsandsystems.Inthisageofmultimediagamingcomputers, audioandvideoentertainmentsystems,andsmartphones,itisalmostcertainthatyou, thereaderofthistext,haveformedsomeimpressionofthemeaningoftheterms signal and system,andyouprobablyusethetermsoftenindailyconversation.
Itislikelythatyourusageandunderstandingofthetermsarecorrectwithinsome ratherbroaddefinitions.Forexample,youmaythinkofasignalas“something”that carriesinformation.Usually,thatsomethingisapatternofvariationsofaphysicalquantity thatcanbemanipulated,stored,ortransmittedbyphysicalprocesses.Examplesinclude speechsignals,audiosignals,videoorimagesignals,biomedicalsignals,radarsignals, andseismicsignals,tonamejustafew.Animportantpointisthatsignalscantakemany equivalentformsor representations. Forexample,aspeechsignalisproducedasan acousticsignal,butitcanbeconvertedtoanelectricalsignalbyamicrophone,andthen toastringofnumbersasindigitalaudiorecording.
Theterm system maybesomewhatmoreambiguousandsubjecttointerpretation. Forexample,weoftenuse“system”torefertoalargeorganizationthatadministers orimplementssomeprocess,suchasthe“SocialSecuritysystem”orthe“airline transportationsystem.”However,weareinterestedinamuchnarrowerdefinitionthatis verycloselylinkedtosignals.Morespecifically,asystem,forourpurposes,issomething thatcanmanipulate,change,record,ortransmitsignals.Forexample,aDVDrecording
storesorrepresentsamovieoramusicsignalasasequenceofnumbers.ADVDplayeris asystemforconvertingthenumbersstoredonthedisc(i.e.,thenumericalrepresentation ofthesignal)toavideoand/oracousticsignal.Ingeneral,systems operate onsignalsto producenewsignalsornewsignalrepresentations.
Ourgoalinthistextistodevelopaframeworkwhereinitispossibletomake precisestatementsaboutbothsignalsandsystems.Specifically,wewanttoshowthat mathematicsisanappropriatelanguagefordescribingandunderstandingsignalsand systems.Wealsowanttoshowthattherepresentationofsignalsandsystemsby mathematicalequationsallowsustounderstandhowsignalsandsystemsinteractand howwecandesignandimplementsystemsthatachieveaprescribedpurpose.
1-1MathematicalRepresentationofSignals Signalsarepatternsofvariationsthatrepresentorencodeinformation.Manysignals arenaturallythoughtofasapatternofvariationsintime.Afamiliarexampleisaspeech signal,whichinitiallyarisesasapatternofchangingairpressureinthevocaltract. Thispattern,ofcourse,evolveswithtime,creatingwhatweoftencalla timewaveform. Figure1-1showsaplotofarecordedspeechwaveform.Inthisplot,theverticalaxis representsmicrophonevoltage(proportionaltoairpressure),andthehorizontalaxis representstime.Noticethattherearefourplotsinthefigurecorrespondingtofour contiguoustimesegmentsofthespeechwaveform.Thesecondplotisacontinuationofthe first,andsoon,witheachgraphcorrespondingtoatimeintervalof50milliseconds(ms).
Figure1-1 Stripplotofaspeechsignal whereeachrowisacontinuationoftherow above.Thissignal s(t) canberepresentedas afunctionofasingle(time)variable.The shadedregionisshowninmoredetailin Fig.1-2.
ThespeechsignalinFig.1-1isanexampleofaone-dimensional continuoustimesignal .Suchsignalscanberepresentedmathematicallyasafunctionofasingle independentvariable,whichisnormallycalledtimeanddenoted t .Althoughinthis particularcasewecannotwriteasimpleequationthatdescribesthegraphofFig.1-1in termsoffamiliarmathematicalfunctions,wecanneverthelessassociateafunction s(t) withthegraph.Indeed,thegraphitselfcanbetakenasadefinitionofthefunctionthat assignsanumber s(t) toeachinstantoftime(eachvalueof t ).
Many,ifnotmost,signalsoriginateascontinuous-timesignals.However,forreasons thatwillbecomeincreasinglyobviousasweprogressthroughthistext,itisoftendesirable toobtainadiscrete-timerepresentationofasignal.Thiscanbedoneby sampling a continuous-timesignalatisolated,equallyspacedpointsintime.Theresultisasequence ofnumbersthatcanberepresentedasafunctionofanindexvariablethattakesononly integervalues.Thiscanberepresentedmathematicallyas s [n]= s(nTs ),where n isan integer(i.e., {..., 2, 1, 0, 1, 2,... }),and Ts isthe samplingperiod .Notethatour conventionistouseparentheses () toenclosetheindependentvariableofacontinuousvariablefunctionsuchas s(t),andsquarebrackets [] toenclosetheindependentvariable ofadiscrete-variablefunction,e.g.,thesequence s [n].Samplingis,ofcourse,exactly whatwedowhenweplotvaluesofafunctionongraphpaperoronacomputerscreen. Wecannotevaluatethefunctionateverypossiblevalueofacontinuousvariable,but onlyatasetofdiscretepoints.Intuitively,weknowthatthecloserthespacingintime ofthepoints,themorethesequenceretainstheshapeoftheoriginalcontinuous-variable function.Figure1-2showsanexampleofashortsegmentofadiscrete-timesignalthat wasderivedbysamplingthespeechwaveformofFig.1-1withasamplingperiodof Ts = 1/8ms.Inthiscase,thedotsshowthesamplevaluesforthesequence s [n].
Whilemanysignalscanbethoughtofasevolvingpatternsintime,manyothersignals arenottime-varyingpatterns.Forexample,animageformedbyfocusinglightthrougha lensisaspatialpattern,andthusisappropriatelyrepresentedmathematicallyasafunction oftwospatialvariables.Suchasignalwouldbeconsidered,ingeneral,asafunctionof twoindependentvariables[i.e.,apicturemightbedenoted p(x,y)].Aphotographis anotherexample,suchasthegray-scaleimageshowninFig.1-3.Inthiscase,thevalue p(x0 ,y0 ) representstheshadeofgrayatposition (x0 ,y0 ) intheimage.
ImagessuchasthatinFig.1-3aregenerallyconsideredtobetwo-dimensional continuous-variablesignals,sincewenormallyconsiderspacetobeacontinuum.
Figure1-2 Discrete-timesignalrepresentedas aone-dimensionalsequencewhichisa functionofadiscretevariable n.Signal samplesaretakenfromtheshadedregionof Fig.1-1.Thecontinuous-timespeechsignal s(t) isshowningray.
Figure1-3 Exampleofasignalthatcanbe representedbyafunctionoftwospatialvariables.
However,samplingcanlikewisebeusedtoobtainadiscrete-variabletwo-dimensional signalfromacontinuous-variabletwo-dimensionalsignal.Inadigitalcamera,this samplingisdonebyrecordinglightvalueswhichhavebeenfocusedonasensorarray composedofmillionsofpoints,ormega-pixels.Inacolorcamera,therewouldbethree separatearraysforRGB:red,green,andblue.Atwo-dimensionalgray-scaleimagelike Fig.1-3wouldberepresentedbyatwo-dimensionaldiscrete-variablesequenceoran arrayofnumbers,andwouldbedenoted p [m,n]= p(m x ,n y ),whereboth m and n wouldtakeononlyintegervalues,and x and y arethehorizontalandverticalsampling periods,respectively.
Two-dimensionalfunctionsareappropriatemathematicalrepresentationsofstill imagesthatdonotchangewithtime;ontheotherhand,videosaretime-varyingimages thatwouldrequireathirdindependentvariablefortime,soavideosignalwouldbe denoted v(x,y,t).Inanalogtelevision,timeisdiscrete(30frames/s),eachhorizontal line (x) iscontinuous,butthereareafinitenumberofhorizontallines,so y isdiscrete. Inpresentdaydigitalvideo,allthreevariablesofthevideosignal v(x,y,t) arediscrete sincethesignalisasequenceofdiscreteimages.
Ourpurposeinthissectionhasbeentointroducetheideathatsignalscanbe representedbymathematicalfunctions.Althoughwewillsoonseethatmanyfamiliar functionsarequitevaluableinthestudyofsignalsandsystems,wehavenoteven attemptedtodemonstratethatfact.Oursoleconcernistomaketheconnectionbetween functionsandsignals,and,atthispoint,functionssimplyserveasabstractsymbolsfor signals.Thus,forexample,nowwecanreferto“thespeechsignal s(t)”or“thesampled image p [m,n].”Althoughthismaynotseemhighlysignificant,wewillseeinthenext
sectionthatitisindeedaveryimportantsteptowardourgoalofusingmathematicsto describesignalsandsystemsinasystematicway.
1-2MathematicalRepresentationofSystems Aswehavealreadysuggested,asystemissomethingthattransformssignalsintonew signalsordifferentsignalrepresentations.Thisisarathervaguedefinition,butitisuseful asastartingpoint.Tobemorespecific,wesaythataone-dimensionalcontinuous-time systemtakesaninputsignal x(t) andproducesacorrespondingoutputsignal y(t).This canberepresentedmathematicallyby y(t) = T {x(t)}
whichmeansthattheinputsignal(waveform,image,etc.)isoperatedonbythesystem (symbolizedbytheoperator T )toproducetheoutput y(t).Whilethissoundsveryabstract atfirst,asimpleexampleshowsthatthisneednotbemysterious.Considerasystemsuch thattheoutputsignalisthesquareoftheinputsignal.Themathematicaldescriptionof thissystemissimply
whichsaysthatateachtimeinstantthevalueoftheoutputisequaltothesquareofthe inputsignalvalueatthatsametime.Suchasystemwouldlogicallybetermeda“squarer system.”Figure1-4showstheoutputsignalofthesquarerfortheinputofFig.1-1.As wouldbeexpectedfromthepropertiesofthesquaringoperation,weseethattheoutput signalisalwaysnonnegativeandthelargersignalvaluesareemphasizedrelativetothe smallersignalvalues.
Thesquarersystemdefinedby(1.2)isasimpleexampleofa continuous-timesystem (i.e.,asystemwhoseinputandoutputarecontinuous-timesignals).Canwebuilda physicalsystemthatactslikethesquarersystem?Theanswerisyes;thesystemof(1.2) canbeapproximatedthroughappropriateconnectionsofelectroniccircuits.Ontheother hand,iftheinputandoutputofthesystemarebothdiscrete-timesignals(sequencesof numbers)relatedby
thenthesystemwouldbea discrete-timesystem.Theimplementationofthediscretetimesquarersystemwouldbetrivialgivenadigitalcomputer;onesimplymultiplieseach discretesignalvaluebyitself.
Inthinkingandwritingaboutsystems,itisoftenusefultohaveavisualrepresentation ofthesystem.Forthispurpose,engineersuse blockdiagrams torepresentoperations performedinanimplementationofasystemandtoshowtheinterrelationsamongthe manysignalsthatmayexistinanimplementationofacomplexsystem.Anexampleof thegeneralformofablockdiagramisshowninFig.1-5.Whatthisdiagramshowsis simplythatthesignal y(t) isobtainedfromthesignal x(t) bytheoperation T {}.
Figure1-4 Outputofasquarersystemfor thespeechsignalinputofFig.1-1.The squarersystemisdefinedbytheequation y(t) =[x(t)]2
Aspecificexampleofasystemwassuggestedearlierwhenwediscussedthesampling relationshipbetweencontinuous-timesignalsanddiscrete-timesignals.A sampler is definedasasystemwhoseinputisacontinuous-timesignal x(t) andwhoseoutputisthe correspondingsequenceofsamples,definedbytheequation
whichsimplystatesthatthesampler“takesaninstantaneoussnapshot”ofthecontinuoustimeinputsignalonceevery Ts s.1 Thus,theoperationofsamplingfitsourdefinitionof asystem,anditcanberepresentedbytheblockdiagraminFig.1-6.Oftenwewillrefer tothesamplersystemasan“idealcontinuous-to-discreteconverter”or idealC-to-D converter.Inthiscase,asinthecaseofthesquarer,thenamethatwegivetothesystem isreallyjustadescriptionofwhatthesystemdoes.
Figure1-5 Blockdiagramrepresentation ofacontinuous-timesystem.
Figure1-6 Blockdiagramrepresentationofa sampler.
1 Theunitsoftimeinsecondsareabbreviatedass.
1-3SystemsasBuildingBlocks Blockdiagramsareusefulforrepresentingcomplexsystemsintermsofsimplersystems, whicharemoreeasilyunderstood.Forexample,Fig.1-7showsablockdiagram representationoftheprocessofrecordingandplaybackofmusicusingMP3compression. Thisblockdiagrambreakstheoperationdownintofoursubsystems,eachofwhichcould bebrokendownfurtherintosmallersubsystems.ThefirstoperationisA-to-D(analogto-digital)conversiontoacquirethemusicwaveformindigitalform.TheA-to-Dsystem isaphysicalapproximationtotheidealC-to-Dconverterdefinedin(1.4).AnA-to-D converterproducesfinite-precisionnumbersassamplesoftheinputsignal(quantizedto alimitednumberofbits),whiletheidealC-to-Dconverterproducessampleswithinfinite precision.Forthehigh-accuracyA-to-Dconvertersusedinprecisionaudiosystems,the differencebetweenanA-to-DconverterandouridealizedC-to-Dconverterisslight,but thedistinctionisveryimportant—onlyfinite-precisionquantizedsamplevaluescanbe storedindigitalmemoryoffinitesize.
Figure1-7showsthattheoutputoftheA-to-Dconverteristheinputtoasystemthat compressesthenumbers x [n] intoamuchsmallerbitstreamusingtheMP3method.This isacomplexprocess,butforourpurposesitissufficienttoshowitasasingleoperation. Theoutputisacompresseddigitalrepresentationthatmaybeefficientlystoredasdata onaserverortransmittedtoauser.Onceanotheruserhasthecompresseddatafile, theMP3compressionmustbereversedinordertolistentotheaudiosignal.Since MP3isa“lossy”compressionscheme,thesignalsynthesizedbytheMP3decoderis onlyanapproximationtotheoriginal.ThevalueofMP3isthatthisapproximationis audiblyindistinguishablefromtheoriginalbecausetheMP3encodingmethodexploits aspectsofhumanhearingthatrendercertaincodingerrorsinaudible.Oncethemusic waveformisreconstitutedindigitalformas ˆ x [n],thelastblockdoestheconversionofthe signalfromdiscrete-timeformtocontinuous-time(acoustic)formusingasystemcalleda D-to-A(digital-to-analog)converter.Thissystemtakesfinite-precisionbinarynumbers insequenceandfillsinacontinuous-timefunctionbetweenthesamples.Theresulting continuous-timeelectricalsignalcouldthenbefedtoothersystems,suchasamplifiers, loudspeakers,andheadphones,forconversiontosound.InChapter4,wewilldiscussthe idealD-to-Cconverter,whichisanidealizationofthephysicaldevicecalledanD-to-A converter.
SystemslikeMP3audioareallaroundus.Forexample,digitalcamerasuseJPEG encodingtoreducedigitalimagefilesizespriortostorage,andJPEGdecodingtoview pictures.Mostofthetimewedonotneedtothinkabouthowsuchsystemswork,butthis exampleillustratesthevalueofthinkingaboutacomplexsysteminahierarchicalform.
Figure1-7 SimplifiedblockdiagramforMP3audiocompressionandplaybacksystem.
Inthisway,wecanfirstunderstandtheindividualparts,thentherelationshipamongthe parts,andfinallythewholesystem.BylookingattheMP3audiosysteminthismanner, wecandiscusstwothings.Firstofall,theconversionfromcontinuous-timetodiscretetimeandbacktocontinuous-timecanbeconsideredseparatelyfromtheotherpartsof thesystem.Theeffectofconnectingtheseblockstothesystemisthenrelativelyeasy tounderstandbecausetheyprovidetheinputandoutputinterfacetorealaudiosignals. Secondly,detailsofsomepartscanbehiddenandlefttoexpertswho,forexample,can developmoredetailedbreakdownsoftheMP3encoderanddecodersubsystems.Infact, thosesystemsinvolvemanysignalprocessingoperations,anditispossibletospecify theiroperationsbyconnectingseveralcanonicalDSPblocksthatwewillstudyinthis text.
1-4TheNextStep NOTE
CompanionWebsite hasmanylabs, demonstrationsand homeworkproblems withsolutions
TheMP3audiocodingsystemisagoodexampleofarelativelycomplicateddiscretetimesystem.BuriedinsidetheblocksofFig.1-7aremanydiscrete-timesubsystems andsignals.WhilewedonotpromisetoexplainallthedetailsofMP3codersorany othercomplexsystem,wedohopetoestablishthefoundationsfortheunderstandingof discrete-andcontinuous-timesignalsandsystemssothatthisknowledgecanbeapplied tounderstandingcomponentsofmorecomplicatedsystems.InChapter2,wewillstart atabasicmathematicallevelandshowhowthewell-knownsineandcosinefunctions fromtrigonometryplayafundamentalroleinsignalandsystemtheory.Next,weshow howcomplexnumberscansimplifythealgebraoftrigonometricfunctions.Subsequent chaptersintroducetheconceptofthefrequencyspectrumofasignalandtheconceptof filteringwithalineartime-invariantsystem.Bytheendofthebook,ifyouhavediligently workedtheproblems,experiencedthedemonstrations,anddonethelaboratoryexercises ontheCompanionWebsite(whicharemarkedwithicons),youwillberewardedwith asolidunderstandingofmanyofthekeyconceptsunderlyingmuchofmodernsignal processingtechnology.
2 Sinusoids Webeginourdiscussionbyintroducingageneralclassofsignalsthatarecommonly called cosinesignals or,equivalently, sinesignals,whicharealsocommonlyreferredto ascosineorsine waves,particularlywhenspeakingaboutacousticorelectricalsignals.
Collectively,suchsignalsarecalled sinusoidalsignals or,moreconcisely, sinusoids Sinusoidalsignalsarethebasicbuildingblocksinthetheoryofsignalsandsystems,and itisimportanttobecomefamiliarwiththeirproperties.Themostgeneralmathematical formulaforasinusoidis
wherecos(·) denotesthecosinefunctionthatisfamiliarfromthestudyoftrigonometry. Whendefiningacontinuous-timesignal,wetypicallyuseafunctionwhoseindependent variableis t ,acontinuousrealvariablethatrepresentstime.From(2.1)itfollowsthat x(t) isamathematicalfunctioninwhichtheangle(orargument)ofthecosinefunction is,inturn,afunctionofthevariable t .Sincewenormallythinkoftimeasincreasing uniformly,theangleofthecosinefunctionlikewiseincreasesinproportiontotime.The parameters A, ω0 ,and ϕ arefixednumbersforaparticularcosinesignal.Specifically, A iscalledthe amplitude, ω0 the radianfrequency,and ϕ the phase ofthecosine signal.
x(t) = A cos(ω0 t + ϕ)
(2.1)
Figure2-1 Sinusoidalsignalgeneratedfrom theformula: x(t) = 10cos(2π(440)t 0.4π).
Figure2-1showsaplotofthecontinuous-timesinusoid
x(t) = 10cos(2π(440)t 0.4π)
where A = 10, ω0 = 2π(440),and ϕ =−0.4π in(2.1).Notethat x(t) oscillatesbetween A and A, andrepeatsthesamepatternofoscillationsevery1/440 = 0.00227s (approximately).Thistimeintervaliscalledthe period ofthesinusoid.Wewillshow laterinthischapterthatmostfeaturesofthesinusoidalwaveformaredirectlydependent onthechoiceoftheparameters A, ω0 ,and ϕ
2-1Tuning-ForkExperiment Oneofthereasonsthatcosinewavesaresoimportantisthatmanyphysicalsystems generatesignalsthatcanbemodeled(i.e.,representedmathematically)assineorcosine functionsversustime.Amongthemostprominentofthesearesignalsthatareaudibleto humans.Thetonesornotesproducedbymusicalinstrumentsareperceivedasdifferent pitches.Althoughitisanoversimplificationtoequatenotestosinusoidsandpitch tofrequency,themathematicsofsinusoidsisanessentialfirststeptounderstanding complicatedsoundsignalsandtheirperceptionbyhumans.
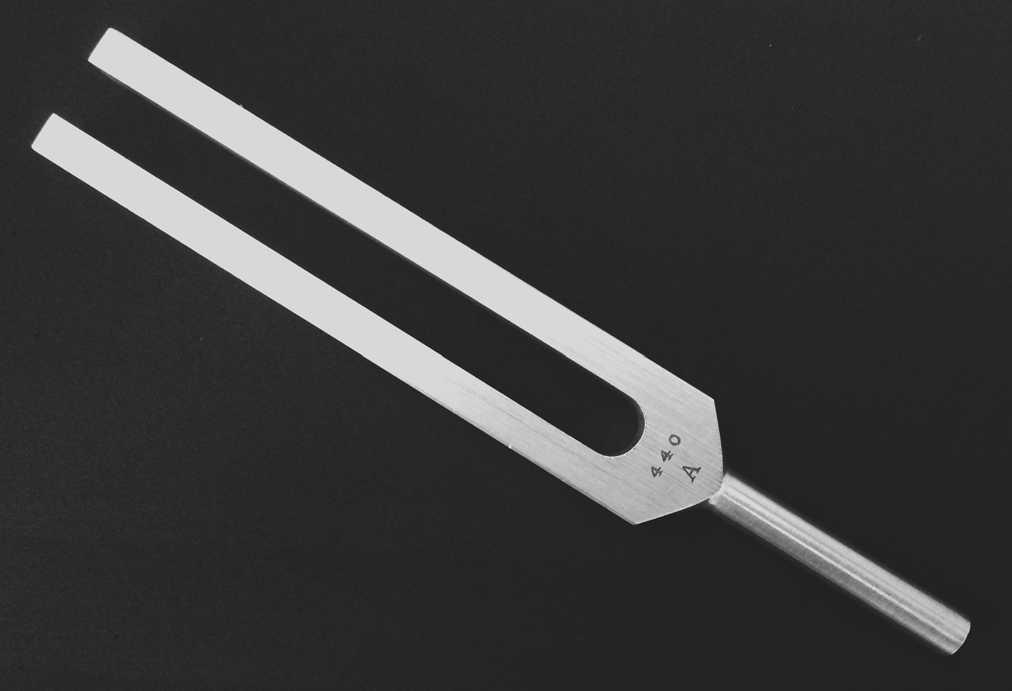
Toprovidesomemotivationforourstudyofsinusoids,wewillbeginbyconsidering averysimpleandfamiliarsystemforgeneratingasinusoidalsignal.Thissystem isa tuningfork ,anexampleofwhichisshowninFig.2-2.Whenstrucksharply, thetinesofthetuningforkvibrateandemita“pure”tone.Thistonehasasingle frequency,whichisusuallystampedonthetuningfork.Itiscommontofind “A–440”tuningforks,because440hertz(Hz)isthefrequencyofAabovemiddleC onamusicalscale,andisoftenusedasthereferencenotefortuningapianoand othermusicalinstruments.Ifyoucanobtainatuningfork,performthefollowing experimentwhichisshowninamovieontheCompanionWebsite.
Strikethetuningforkagainstyourknee,andthenholditclosetoyourear. Youshouldhearadistinct“hum”atthefrequencydesignatedforthetuning fork.Thesoundwillpersistforaratherlongtimeifyouhavestruckthe tuningforkproperly;however,itiseasytodothisexperimentincorrectly. Ifyouhitthetuningforksharplyonahardsurfacesuchasatable,youwill hearahighpitchedmetallic“ting”sound.Thisis not thecharacteristicsound
DEMO TuningFork
Figure2-2 Pictureofatuningforkfor440Hz. thatyouareseeking.Ifyouholdthetuningforkclosetoyourear,youwill heartwotones:Thehigher-frequency“ting”willdieawayrapidly,andthen thedesiredlower-frequency“hum”willbeheard.
WithamicrophoneandacomputerequippedwithanA-to-Dconverter,wecanmake adigitalrecordingofthesignalproducedbythetuningfork.Themicrophoneconverts thesoundintoanelectricalsignal,whichinturnisconvertedtoasequenceofnumbers storedinthecomputer.ThenthesenumberscanbeplottedasawaveforminMATLAB. Atypicalplotofashortsectionofthesignaltakenwellaftertheinitialstrikeofthe tuningforkisshowninFig.2-3(a)foranA–440tuningfork.Inthiscase,theA-to-D convertersampledtheoutputofthemicrophoneatarateof10,000samples/s.Thesignal
Figure2-3 (a)RecordingofanA–440 tuning-forksignalsampledatasamplingrate of10,000samples/s.(b)Zoomintothefirst 3mstakenfromthetopplot(shadedregion), showingtheindividualsamplevalues (connectedbyathingrayline).
(a) A−440 Tuning-Fork Signal
(b)SampleValuesat10,000Hz
samplesfortheinitial3msofthesignalareshownonafinerscaleinFig.2-3(b).The “continuouslooking”plotinFig.2-3(a)wasconstructedbyconnectingthesamplevalues bystraightlines.Itappearsthatthesignalgeneratedbythetuningforkisverymuchlike thecosinesignalofFig.2-1.Itoscillatesbetweensymmetriclimitsofamplitudeandit alsorepeatsperiodicallywithaperiodofabout2.27ms(0.00227s).Aswewillseein Section2-3.1,thisperiodisproportionaltothereciprocalof ω0 (i.e.,2π/(2π(440)) ≈ 0.00227).
Thisexperimentshowsthatcommonphysicalsystemsproducesignalswhose graphicalrepresentationslookverymuchlikecosinesignals,asinthegraphicalplotsof themathematicalfunctionsdefinedin(2.1).Later,inSection2-7,wewilladdfurther credencetothesinusoidalmodelforthetuning-forksoundbyshowingthatcosine functionsariseassolutionstothedifferentialequationthat(throughthelawsofphysics) describesthemotionofthetuningfork’stines.Beforelookingatthephysicsofthetuning fork,however,weshouldbecomemorefamiliarwithsinusoidsandsinusoidalsignals.
2-2ReviewofSineandCosineFunctions Sinusoidalsignalsaredefinedintermsofthefamiliarsineandcosinefunctionsof trigonometry.Abriefreviewofthepropertiesofthesebasictrigonometricfunctions isusefulforunderstandingthepropertiesofsinusoidalsignals.
Thesineandcosinefunctionsareoftenintroducedanddefinedthroughatriangle diagramlikeFig.2-4.Thetrigonometricfunctionssineandcosinetakeanangleastheir argument.Weoftenthinkofanglesindegrees,butwheresineandcosinefunctionsare concerned,anglesmustbedimensionless.Anglesarethereforespecifiedinradians.If theangle θ isinthefirstquadrant(0 ≤ θ<π/2rad),thenthesineof θ isthelength y ofthesideofthetriangleoppositetheangle θ dividedbythelength r ofthehypotenuse oftherighttriangle.Similarly,thecosineof θ istheratioofthelengthoftheadjacent side x tothelengthofthehypotenuse.
Notethatas θ increasesfrom0to π/2,cos θ decreasesfrom1to0andsin θ increases from0to1.Whentheangleisgreaterthan π/2radians,thealgebraicsignsof x and y comeintoplay, x beingnegativeinthesecondandthirdquadrantsand y beingnegative inthethirdandfourthquadrants.Thisismosteasilyshownbyplottingthevaluesofsin θ
Figure2-4 Definitionofsineandcosine ofanangle θ withinarighttriangle.
Figure2-5 (a)Sinefunctionand(b)cosine functionplottedversusangle θ .Bothfunctions haveaperiodof2π
andcos θ asafunctionof θ ,asinFig.2-5.Severalfeaturesoftheseplots1 areworthy ofcomment.Thetwofunctionshaveexactlythesameshape.Indeed,thesinefunctionis justacosinefunctionthatisshiftedtotherightby π/2(i.e.,sin θ = cos(θ π/2)).Both functionsoscillatebetween +1and 1,andtheyrepeatthesamepatternperiodically withperiod2π .Furthermore,thesinefunctionisanoddfunctionofitsargument,and thecosineisanevenfunction.Asummaryoftheseandotherpropertiesispresentedin Table2-1.
Table2-2showsthatthesineandcosinefunctionsareverycloselyrelated.Thisoften leadstoopportunitiesforsimplificationofexpressionsinvolvingbothsineandcosine functions.Incalculus,wehavetheinterestingpropertythatthesineandcosinefunctions arederivativesofeachother:
d sin θ
dθ = cos θ and d cos θ dθ =− sin θ
Table2-1 Basicpropertiesofthesineandcosinefunctions.
Property
Equation
Equivalence sin θ = cos(θ π/2) orcos(θ) = sin (θ + π/2)
Periodicity cos(θ + 2πk) = cos θ ,when k isaninteger
Evennessofcosine cos( θ) = cos θ
Oddnessofsine sin ( θ) =− sin θ
Zerosofsine sin (πk) = 0,when k isaninteger
Onesofcosine cos(2πk) = 1,when k isaninteger
Minusonesofcosine cos[2π(k + 1 2 )]=−1,when k isaninteger
1 Itisagoodideatomemorizetheformoftheseplotsandbeabletosketchthemaccurately.