
7 minute read
CURSOR


Emergency response teams have to work rapidly to locate survivors in the aftermath of a natural disaster like an earthquake or flood, yet the environment may remain very dangerous. Researchers in the CURSOR project are developing robots and sensors to help first responders work effectively without putting more lives at risk, as Tiina Ristmäe explains.
A natural disaster like a flood or
earthquake can have a devastating impact on the area affected, and it can be difficult for emergency response teams to rapidly locate survivors without putting more lives at risk. Drones and robots hold great potential in these terms, but these technologies are not yet widely used in emergency response, a major motivating factor behind the work of the CURSOR project. “The equipment available to many relief organisations is often not as modern as we would like,” says Tiina Ristmäe, the coordinator of the project. The project consortium brings together 17 partners from across Europe and Japan with the shared goal of developing technologies to be used in the period after the initial response, when maybe local authorities ask for further assistance and support. “International teams arrive when the country or region affected requests further help. These teams have standardised training and their equipment is more or less similar,” continues Ristmäe.
Search and rescue
The first task for these teams is typically to search for survivors and rescue them as rapidly as possible. Drones play an important role here, helping teams assess the damage to buildings for example and evaluate the overall situation, from which they can then develop more detailed plans. “Drones help to accelerate search and rescue,” says Ristmäe. The focus in the project
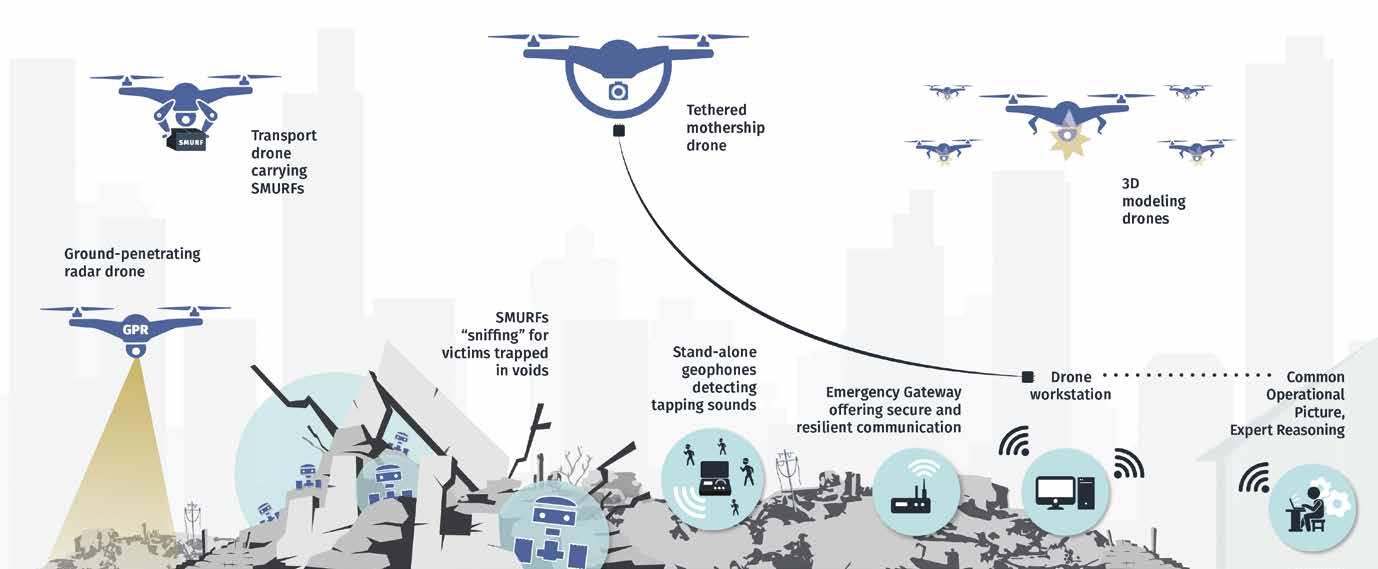
Transport drone carrying SMURF dummies, set up at a field test, SMURF. @ CURSOR project. is on developing robotic components, including SMURFs (Soft, Miniaturised, Underground Robotic Finders), which are designed for deployment in emergency response situations either manually by first responders or using special transport drones (based on a combination of commercially available and newly developed components). “A transport drone deploys the SMURFs on a rubble pile, for example from a collapsed building, and releases them from a maximum height of 1 metre. So, the drone has to come down close to the rubble, but it doesn’t have to land,” explains Ristmäe. “The robots are released, and then they start to move around in the rubble. They can navigate autonomously, or by an operator.”
A pile of rubble is a very dangerous environment for first responders, with the risk of aftershocks that could lead to further collapses. The main task for these robots in this type of situation is to act as the eyes and ears of first responders, providing information to handheld devices, and they are equipped with several sensors to help locate survivors. “We have a heat sensor, a thermal camera, and it’s also possible to have a live video picture and an audio connection,” says Ristmäe. Another important part of the project’s work involves developing a sniffer, which Ristmäe describes as essentially an artificial nose. “The aim is that the sniffer is able to smell what are called volatile organic compounds (VOCs), which everybody releases,” she outlines. “The sniffer detects



these compounds, and then the information will be transmitted to a first responder. They will transmit a probability that there is somebody alive in a particular location.”
The sniffer is integrated into the robot, and has been trained to recognise these compounds that are released by humans from breath, urine or sweat. Before developing the sniffer, Ristmäe and her colleagues investigated what kinds of volatile chemical components the human body releases, components which could then be recognised by a sniffer. “This volatile ‘signature’ gives a probability that there is a human being there,” she says. A robot can distinguish between deceased and alive people, while the audio/visual connection also helps in terms of understanding the extent of injuries to people and identifying whether there are any other casualties close by. “This is something that we don’t have right now. Rescue dogs are very valuable in emergency response, but they also have a lot of limitations,” continues Ristmäe. “In the project we aim to provide first responders with additional options.”
Toolbox of options
There is no single technology that can be used in every environment or situation, so the aim in the project is rather to provide a kind of toolbox, giving first responders different options suitable for the specific challenges they face. These tools are designed to complement rather than replace existing technologies. “Search dogs will remain, as will geophones and other technologies. Every component has its own purpose,” stresses Ristmäe. The test scenario in the project is an earthquake, yet Ristmäe says the technology could also be applied in the aftermath of other natural disasters, such as a landslide for example. “We believe that these robots could be used in different scenarios. For example, a landslide also causes the collapse of buildings,” she says. “However, we’re not looking to validate this within the scope of the CURSOR project.”
The priority at this stage is to develop the system, with researchers developing an open architecture system, so that different tools developed in the project can be used in combination with other technologies. The ultimate aim here is to develop tools that will help emergency response teams work more effectively, and Ristmäe says the views and feedback of end-users help guide research. “We are doing very hands-on testing, although the technology is not fully mature. We want the first responders to be able to play around with the technology, provide their feedback and validate it,” she outlines. “The technology has been developed to respond to the problems end-users face.”
This technology is not yet ready to be applied in emergency response, however significant progress has been made over the course of the project. The CURSOR solutions have a technology readiness level

(TRL) of somewhere between 6 and 7, and Ristmäe is hoping to build further on these foundations. ”It makes sense to have a successor project and concentrate on a few of the components. One very interesting outcome from CURSOR is the heatmap,” she outlines. Currently first responders receive different layers of information from various sensors, including the SMURFs, drones and geophones; this heatmap allows them to select the information they need to make a decision at a particular point, which Ristmäe says is highly valuable. “Decisions are always made by the first responders, and never by technology,” she stresses. “We want to provide information to first responders to support their decision-making.”
Setting up SMURFs at a field test @ CURSOR project. First Responders at field test @ CURSOR project.
Accelerating Search and Rescue operations Project Objectives
CURSOR project is a European and Japanese research initiative to develop a Search & Rescue Kit using drones, miniaturized robots, and advanced sensors to accelerate SaR operations. It will devise these novel technologies to speed up the detection of survivors trapped in collapsed buildings and to improve the working conditions of first responders.
Project Funding
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 832790 and from the Japan Science and Technology Agency.
Project Partners
German Federal Agency for Technical Relief THW (Project coordinator) • Entente pour la Forêt Méditerranéenne Valabre • Merseyside Fire & Rescue Service MFRA • Service Départemental d’Incendie et de Secours de la Savoie SDIS73 • Hellenic Rescue Team of Attica HRTA • Institute of Communication and Computer Systems ICCS (Technical and Scientific Coordinator) • Tohoku University Tohoku • SINTEF Digital SINTEF • Commissariat à l’énergie atomique et aux énergies alternatives CEA • The University of Manchester UNIMAN • EXUS • Astrial GmbH, ASTRIAL • International Security Competence Centre GmbH ISCC • Trilateral Research Ltd TRI • German Institute for Standardisation DIN • ARTTIC Innovation GmbH AI (Project office) • ARTTIC S.A.S. ART
Contact Details
Tiina Ristmäe Project Coordinator at CURSOR T: +49 228 9401936 E: tiina.ristmaee@thw.de W: https://www.cursor-project.eu Karin Rosenits-Seilmeier Dissemination Manager at CURSOR T: +49 89 248830342 E: rosenits@arttic-innovation.de W: https://www.cursor-project.eu


Tiina Ristmäe
Tiina Ristmäe is coordinator of the CURSOR project and a senior researcher at THW. She leads the project with her considerable experience with developing innovative technologies with strong end-users involvement.











