TABLE OF CONTENTS
05 Walking Courtyards Karlskrona, Sweden, 2022 06 Walk 21 Seoul Conference Seoul, South Korea, 2020 07 Salt Pavilion Uyuni, Bolivia, 2021 08 Espejo Project Uyuni, Bolivia, 2021 09 Wings of Change Competition San Jose, USA 10 Future City Baghdad, Iraq, 2000 11 Mörrum Conference Center Karlshamn, Sweden,2009 12 Arab Open University Amman, Jordan, 2006 13 Emblem Structure Dubai, UAE, 2007 14 London Environmental Analysis London, UK, 2021 15 What’s My Plaza For? Madrid, Spain, 2022 16 Depth City 2022 17 Game of Green Vienna, Austria, 2022 18 Subway City Munich, Stockholm, Prague, 2022 19 Northern Light Pavilion Lapland, 2022 20 Nebulae: Orbital Space Habitat Lower Earth Orbit, 2022 21 Fuzzy Concept Exhibition Ronneby, Sweden, 2012 22
Sketchbook 23 Research Trip Valldaura Self-Sufficient Labs - IAAC, Barcelona, Spain, 2022
PROFILE 01
Jumana Hamdani

B.Arch, M.Arch (Dist)
Architect SAR/MSA and educator at The Swedish School of Planning, BTH. Founder of Jumana Hamdani Architects based in Karlshamn, Sweden. Holds a Master's degree in Advanced Computation for Architecture and Design (Dist) from The Institute for Advanced Architecture of Catalonia in Barcelona and has been a designer of several public and private projects in Asia, Africa, and Europe for the past two decades. Worked in the field of Architectural Computational Design, BIM and Parametric Modelling, Space Habitat Architecture, Urban Analytics, Spatial Networks, Environmental and Structural Design Analysis, developing AI Methods, and Machine Learning Strategies for resilient neighbourhoods. A member of the Swedish Architecture Association and the international list of the German Architectural Association of Baden-Württemberg, AKBW.
WORK MAP
Baghdad Kufa Dubai
Muscat Mecca Irbid Amman Nablus Tripoli Athens Luanda Dakar Barcelona Madrid Kalmar Karlskrona Karlshamn Ronneby London Delft Stuttgart Gdansk Wroclaw Vienna Dublin
02
Abu Dhabi
San Jose, CA San José Uyuni
Space Habitat in LEO
 Earth
Moon Seoul Shanghai
Omsk
Earth
Moon Seoul Shanghai
Omsk
FOREST PAVILION
03Date:2021-2022
Location: Karlshamn, Ronneby
Project Type: commissioned by Region Blekinge, & Kuturrådet
Tools: Rhino 3D, ABB Robot
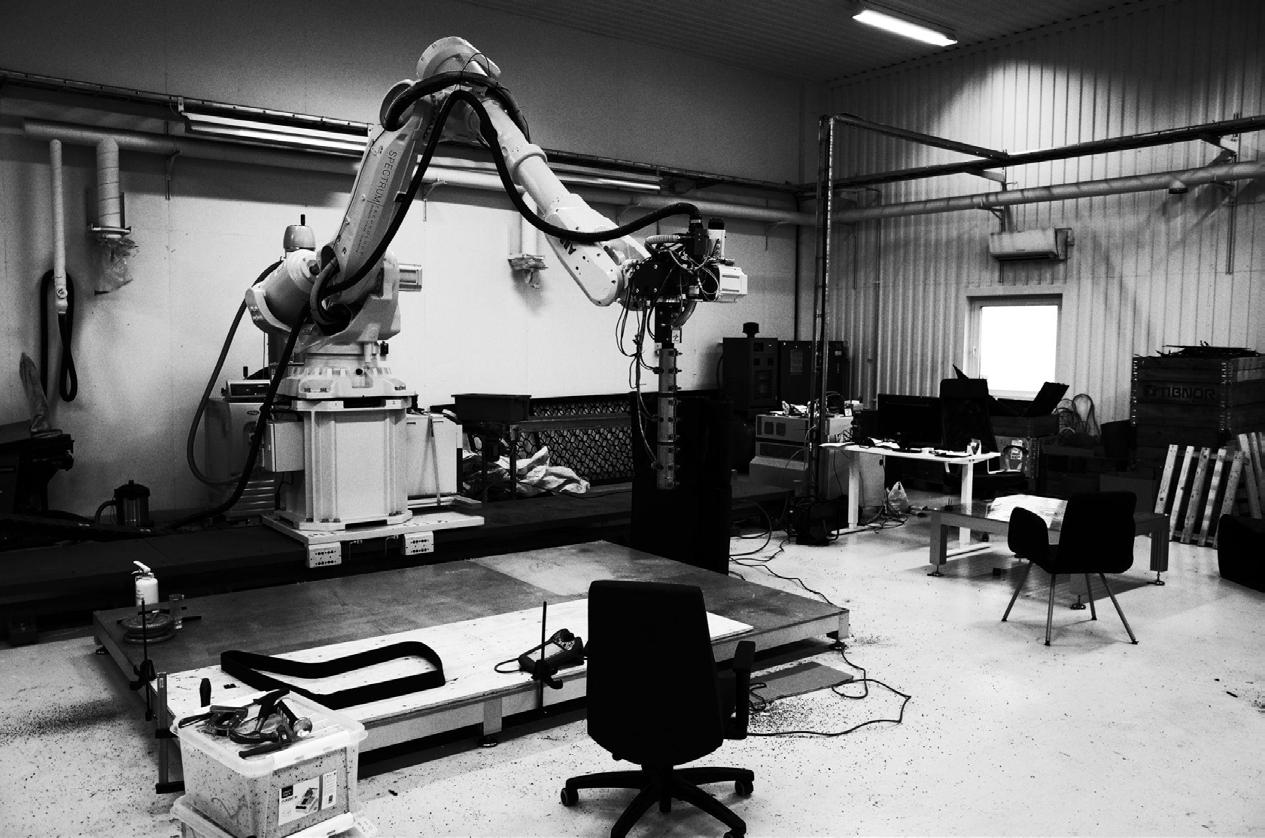
The project was commissioned to Jumana Hamdani Architects by Region Blekinge/ Konst i Blekinge and Kuturrådet to collaborate with Sculptur AB fabrication firm in Karlshamn using ABB Robot that reaches up to 3m height to 3D print with sustainable materials.

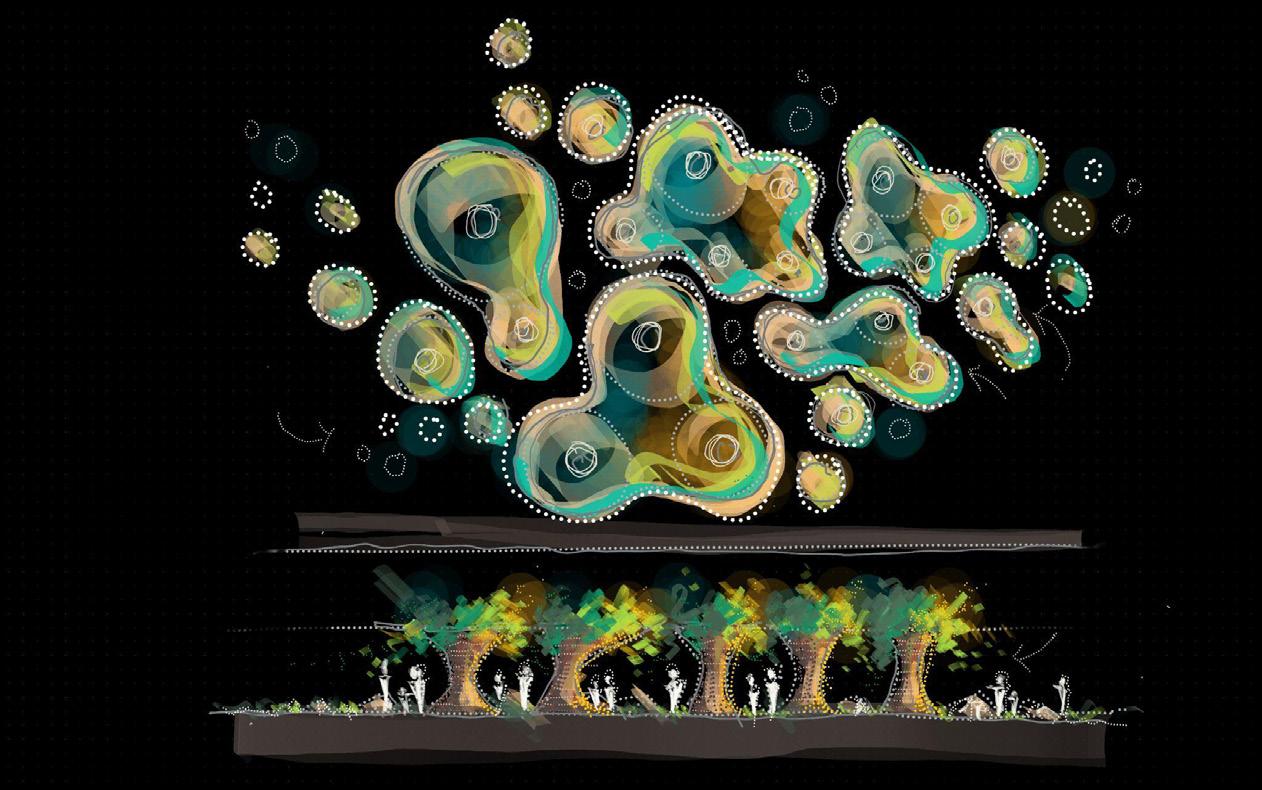
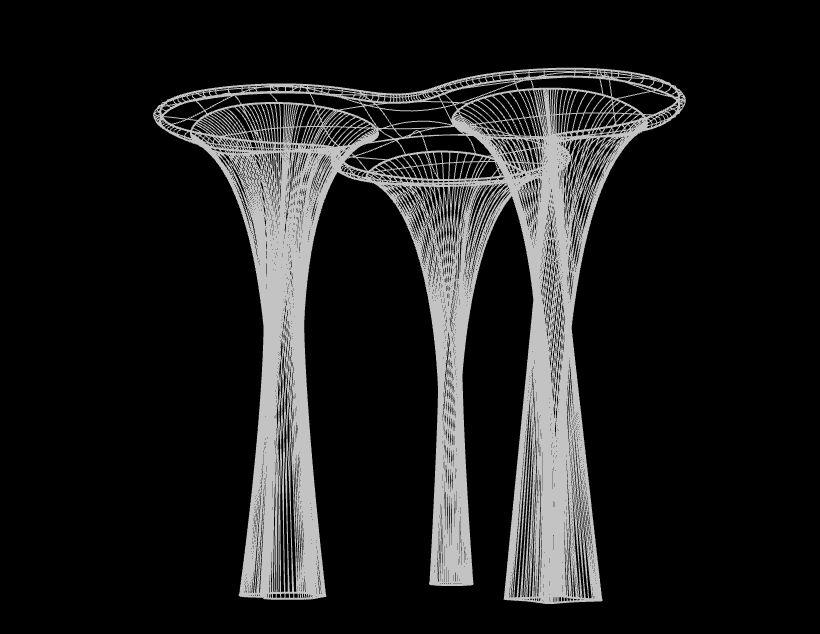
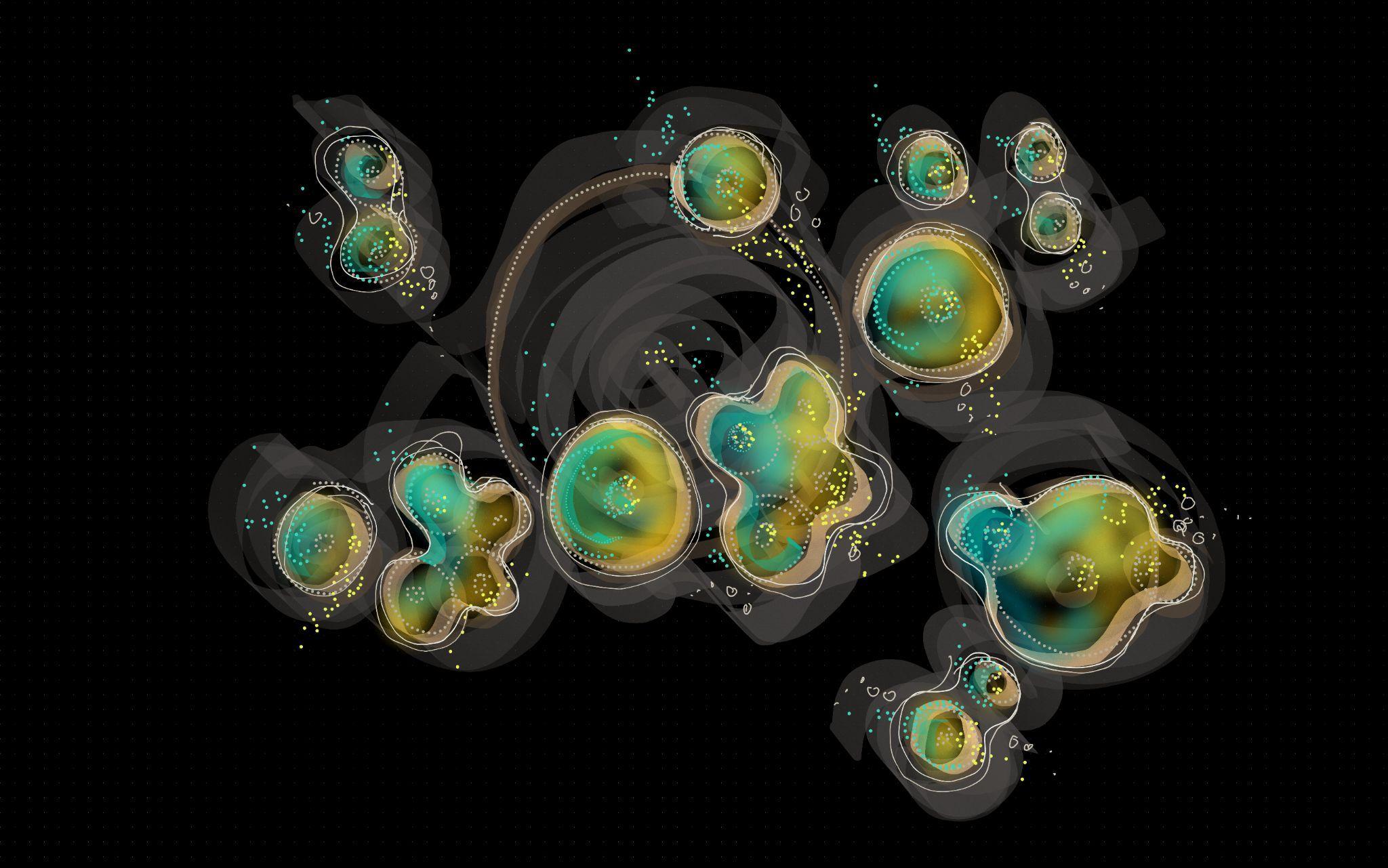
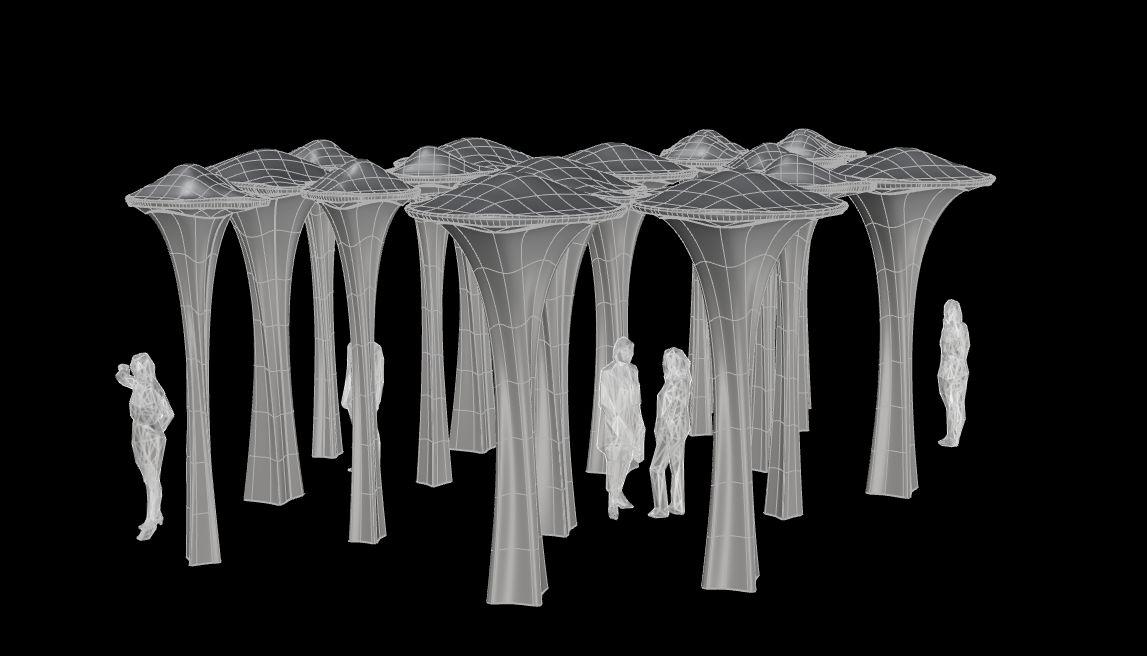
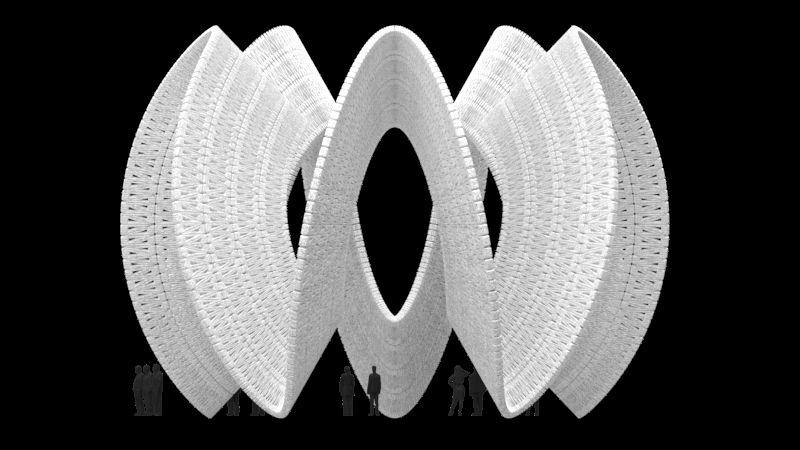
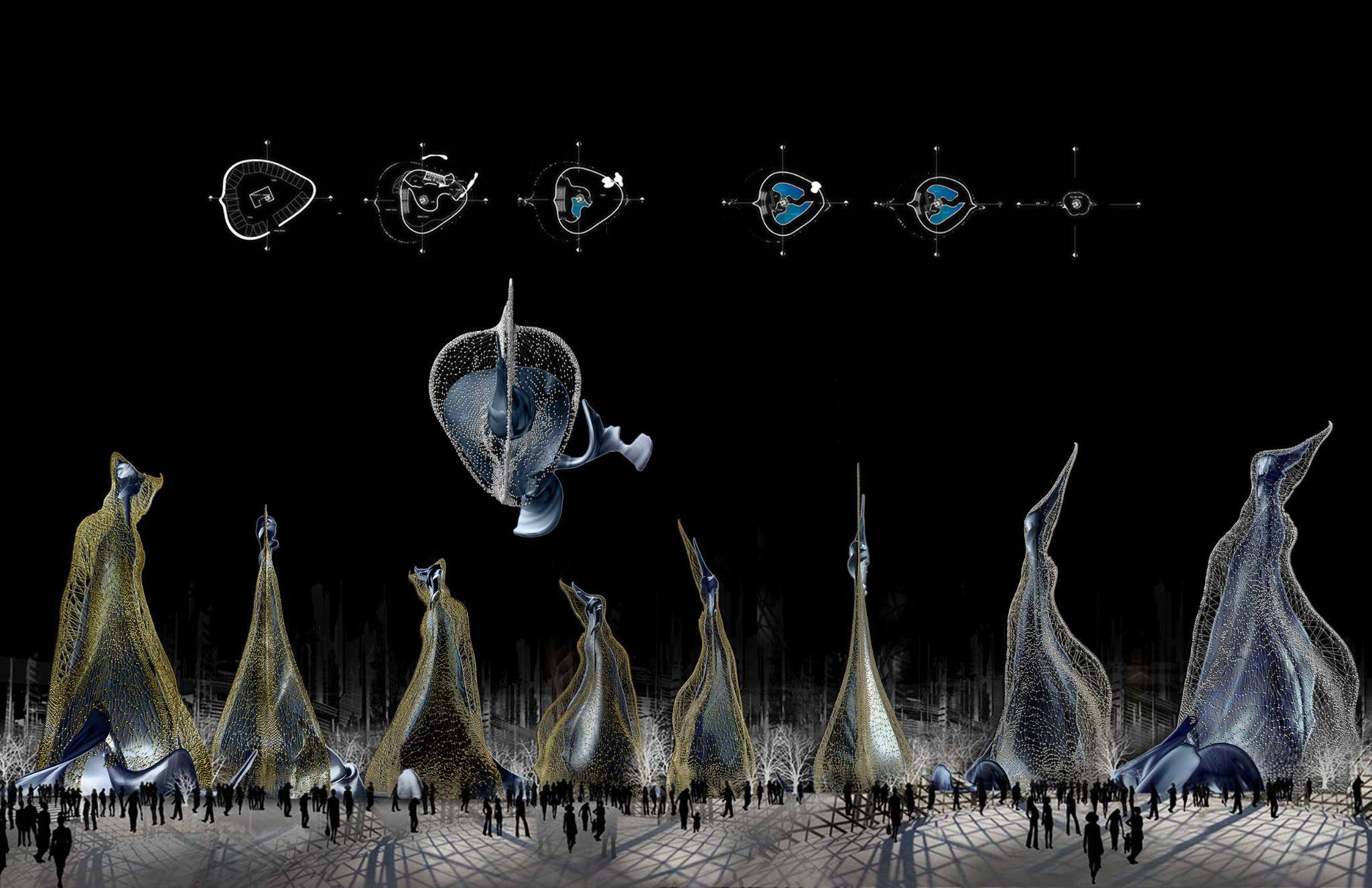
The Forest Pavilion is an experimental public art project testing 3D printing with recycled material made of wood fibers combined with bioplastic PLA. The project aims to rewild cities by creating a new urban structure that has similarities to the surrounding landscape of Blekinge, resembling trees.
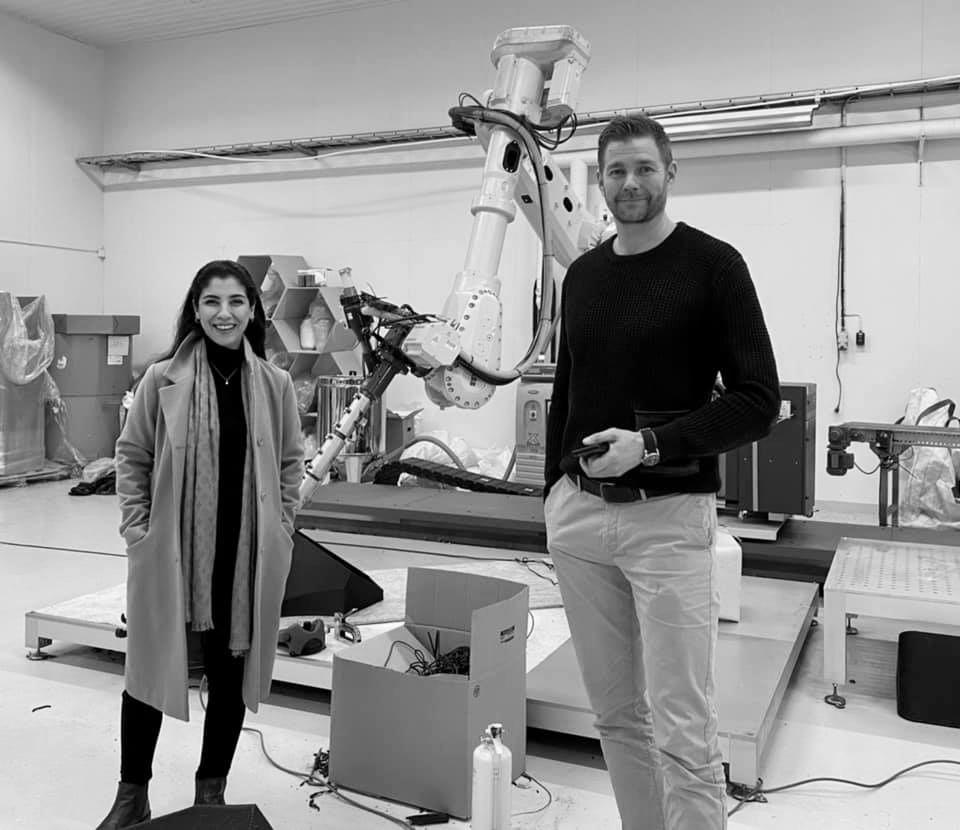 ABB Industrial Robot, with Glenn Mattsing at Sculptur AB, Karlshamn Robot’s reach 3m height
Photo: Torun Ekstrand
ABB Industrial Robot, with Glenn Mattsing at Sculptur AB, Karlshamn Robot’s reach 3m height
Photo: Torun Ekstrand


KEYWORDS: Recycled materials, 3D printing, Public Art, Experimental, Rewilding Cities, Urban Design, Designing Hybrid Alternatives
PAVILION
FOREST
INITIAL CONCEPT
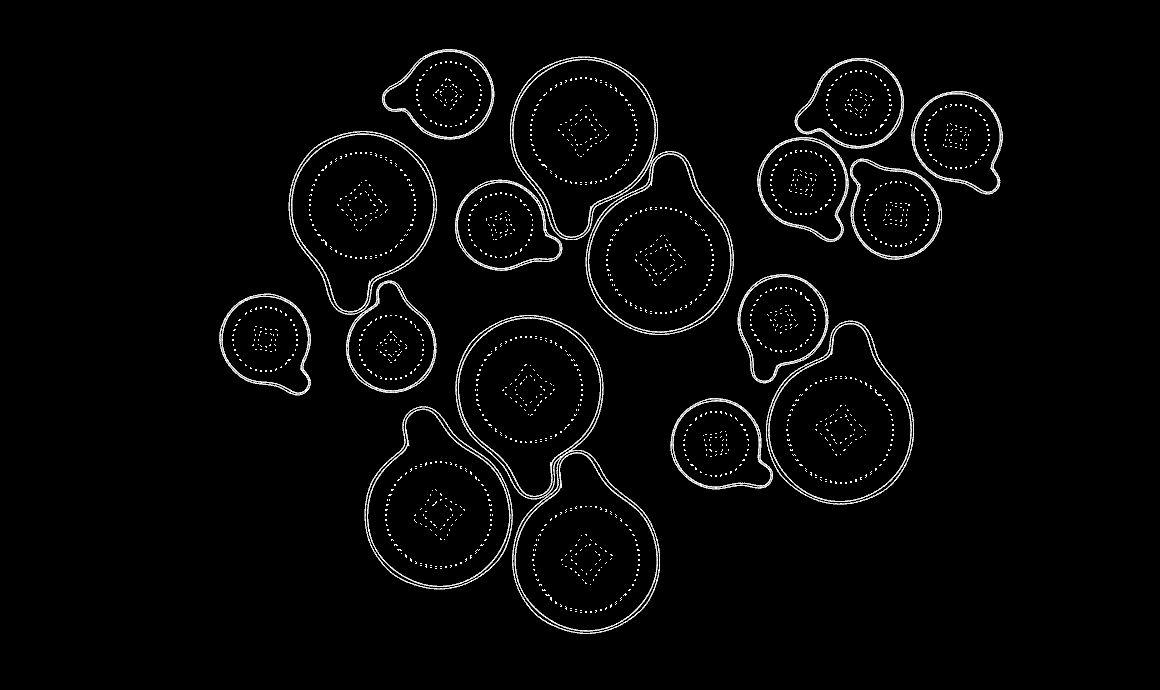
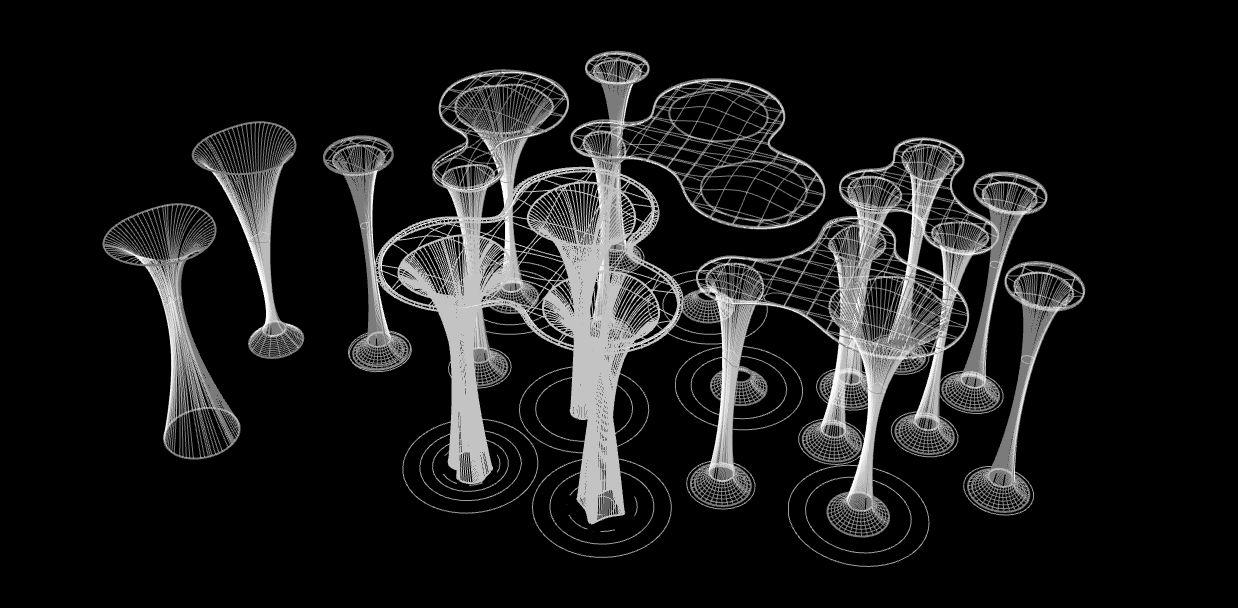
Eco-systems/Rewilding Forest Pavilion
Growing cities and the need to build more at a low cost, and the limited resources on our planet, are all factors pushing us to find more solutions towards sustainable ways of living, building, and reusing the existing constructions.
FOREST PAVILION
 Sama
Sama
 Photo: Sepa
Photo: Sepa
DESIGN IN PROCESS
 Photo: Sepa Sama
Photo: Sepa Sama
The mold structure 100% circular
FOREST PAVILION
 Photo: Sepa Sama
Photo: Sepa Sama
FABRICATION


WOOD FIBRE
 Photo: Sepa Sama
Photo: Sepa Sama
biobased materials WPC (wood fiber and bio-based polymer)
FOREST PAVILION
3D PRINTING MODEL
 Photo: Sepa Sama
Forest Pavilion’s physical model at Ronneby Kulturcentrum
Photo: Sepa Sama
Forest Pavilion’s physical model at Ronneby Kulturcentrum
FOREST PAVILION
 Photo: Sepa Sama
Jumana Hamdani and Emina Kovacic at Ronneby Kulturcentrum
Photo: Sepa Sama
Jumana Hamdani and Emina Kovacic at Ronneby Kulturcentrum
EXHIBITION
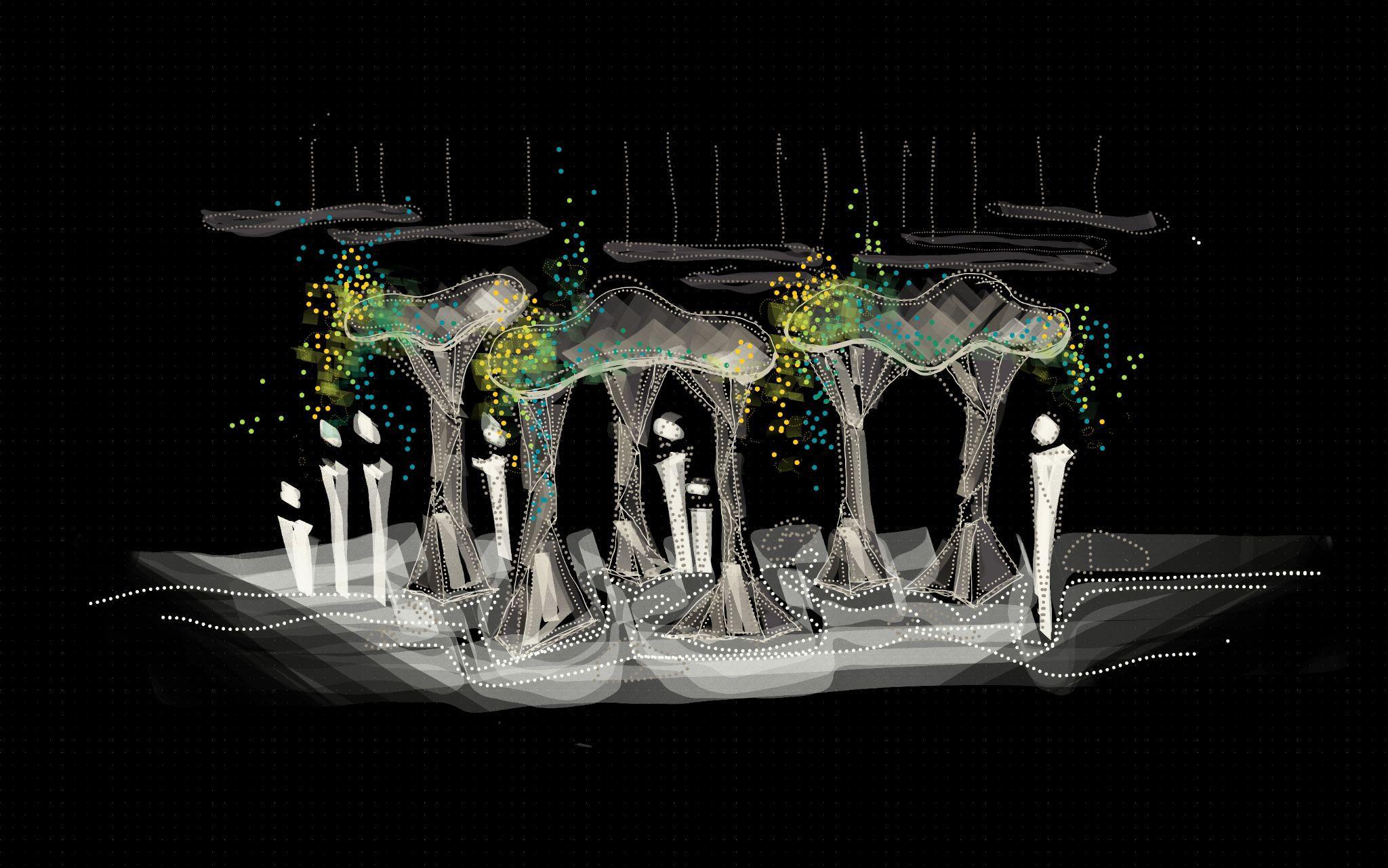
 Photo: Sepa Sama
Jumana Hamdani and Emina Kovacic at Ronneby Kulturcentrum
Photo: Sepa Sama
Jumana Hamdani and Emina Kovacic at Ronneby Kulturcentrum
IAAC SCHOLARSHIP

04 Date: 2021 Location: Barcelona, Spain Proposal Type: Won MaCAD Competition Scholarship at IAAC Tools: Rhino, Grasshopper, 3D Max, Photoshop
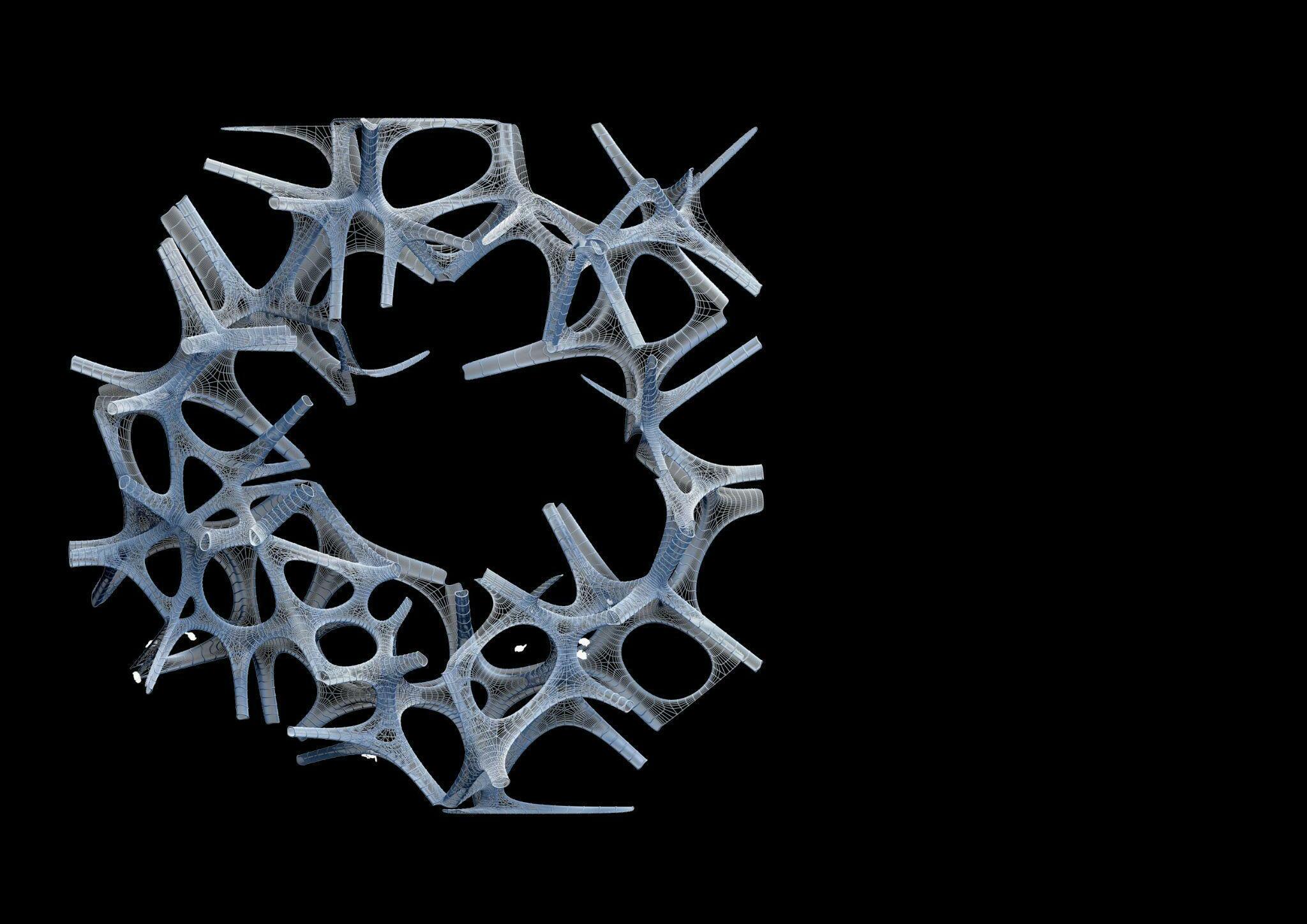
Non-Anthropocentric Structures: Creating Spaces for Wildlife using 3D Printed Waste




Shifting the design thinking towards non-anthropocentrism can save so many species endangered with their surrounding environments. Using 3D printing as an indispensable smart construction technology can help us for example recyclinging the waste in the oceans and turning it into self-sustainable structures that can provide habitats for wildlife on land or above and below water. Also,The use of 3D printing features impact on notable labour, energy saving and material cost benefits, sustainability development support in the construction sector.
 2021│ IAAC - Institute for Advanced Architecture of Catalonia Scholarship │Barcelona, Spain
2021│ IAAC - Institute for Advanced Architecture of Catalonia Scholarship │Barcelona, Spain
WALKING COURTYARDS

05 Date: 2022
Courtyards are traditional architectural features that go back to ancient times. They exist worldwide in different forms and for various social and environmental reasons. In this we will focus on two case studies, one in the north of Europe in Karlskrona, Sweden, and one in the south in Athens, Greece. The comparative research aspects would be aesthetics, social, and thermal comfort for both courtyards. The analysis of the courtyards would serve as a prelude to our walk in town through an itinerary of the courtyards on our way.
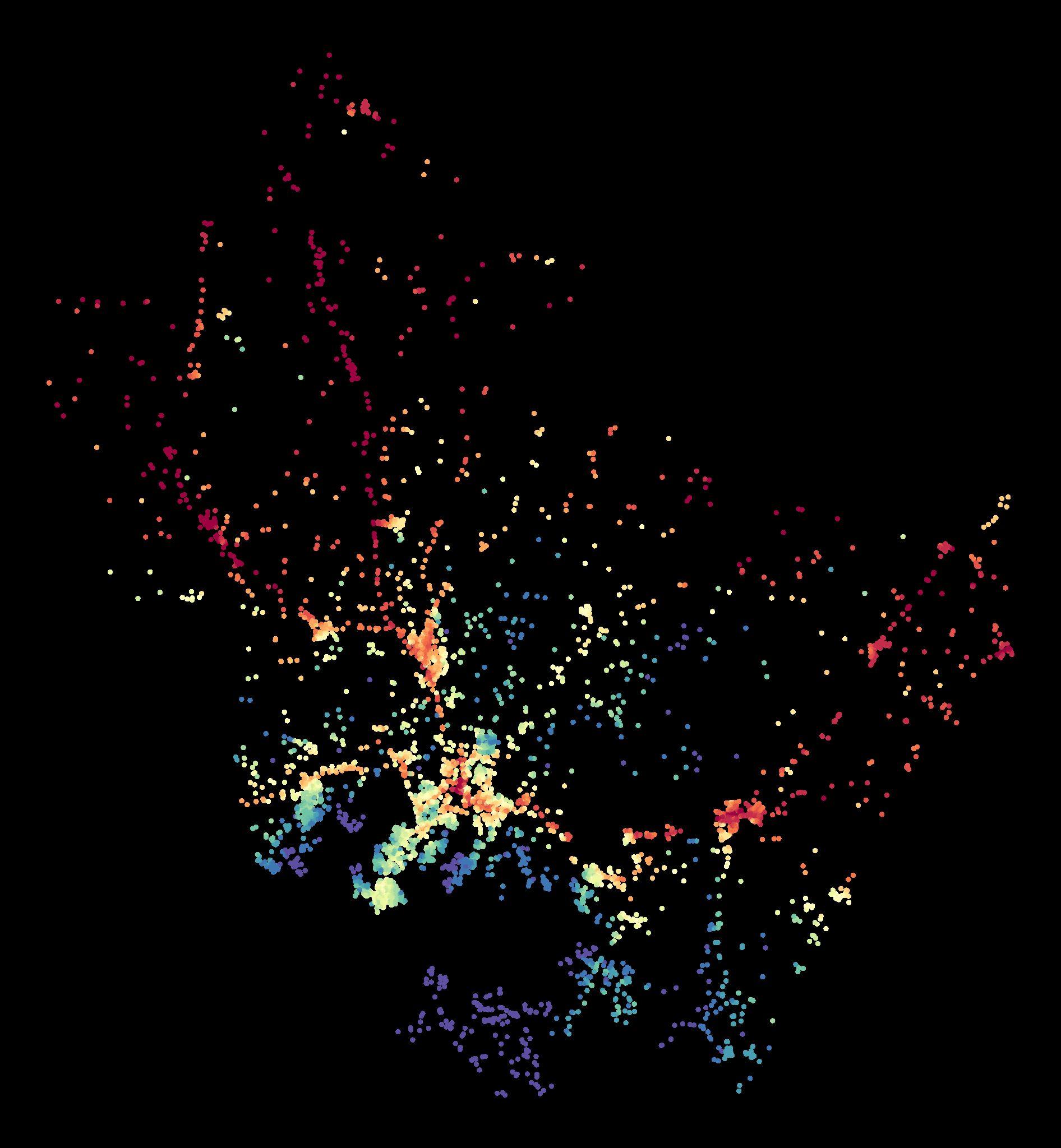 Photo: Sepa Sama World Trade Center Courtyard, Karlskrona
Photo: Sepa Sama World Trade Center Courtyard, Karlskrona
WORLD TRADE CENTER KARLSKRONA

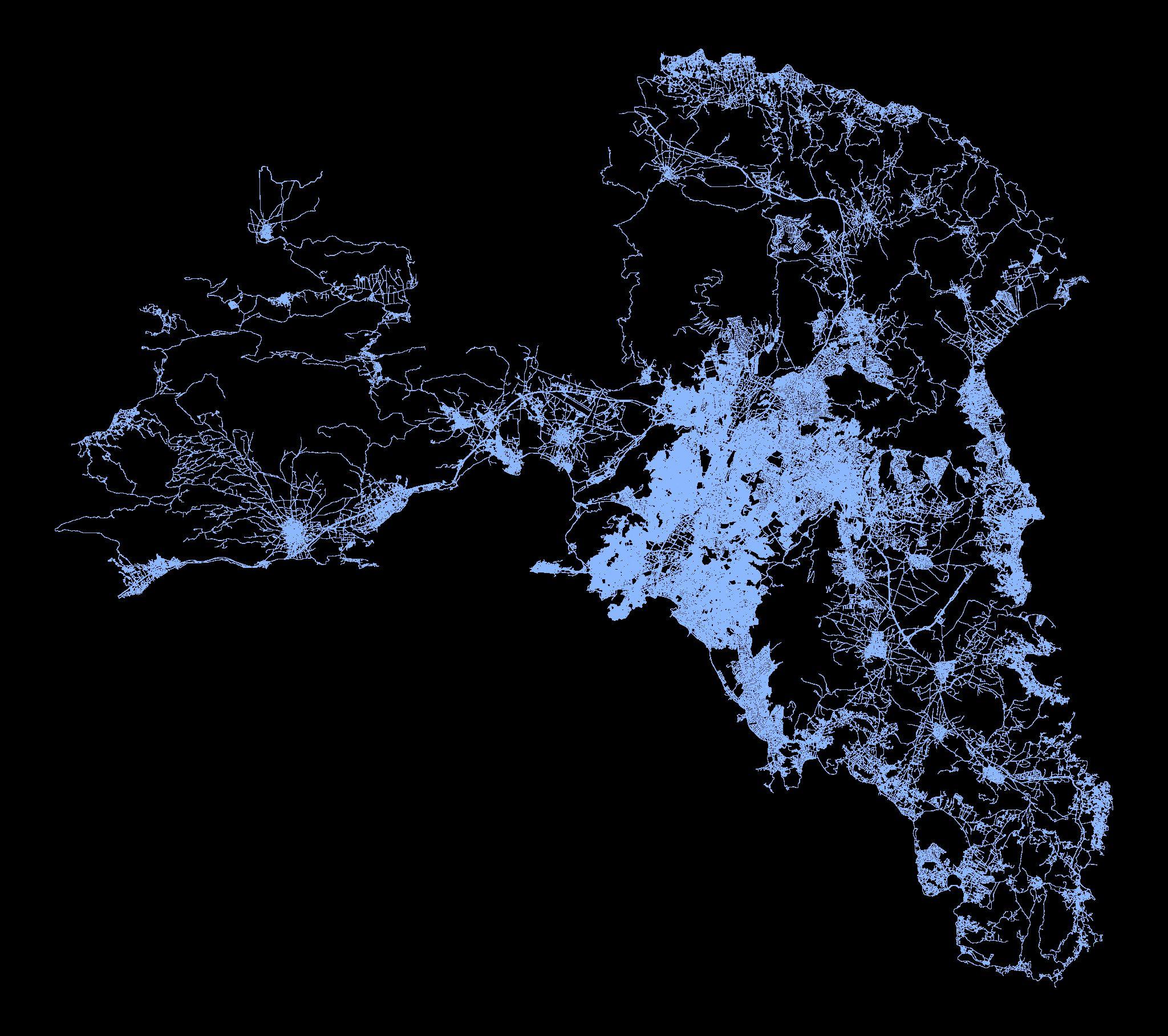 Photo: Sepa Sama
Photo: Sepa Sama
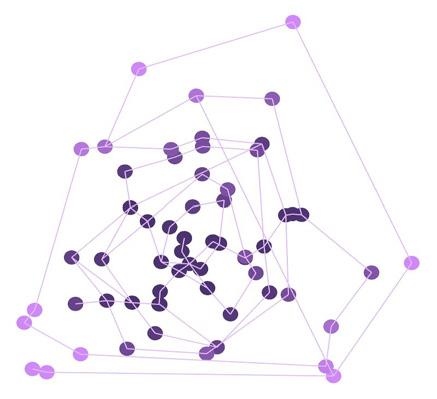
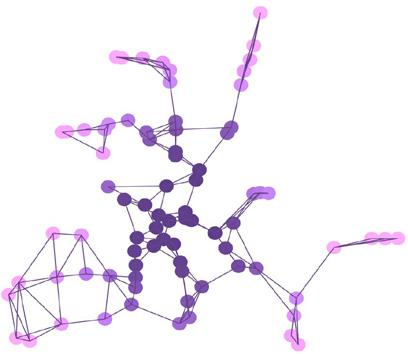
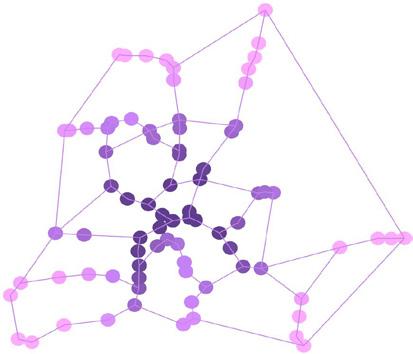
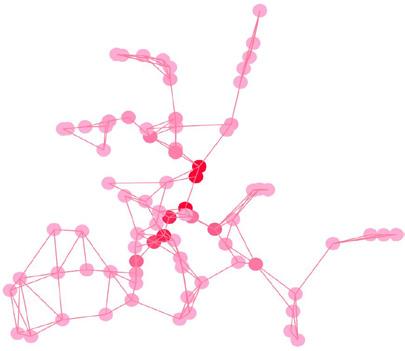
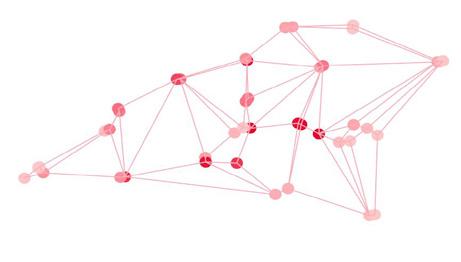
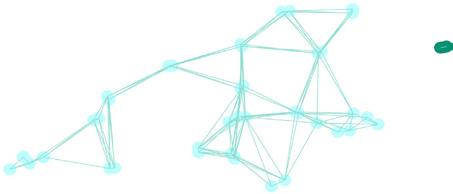
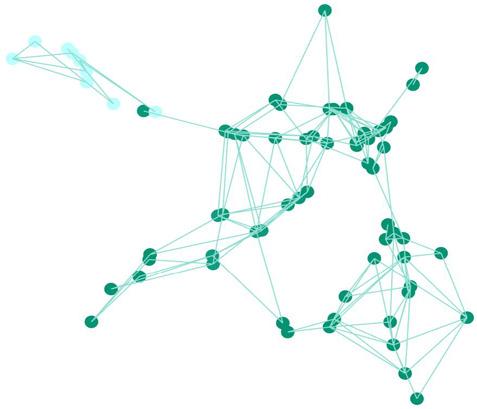
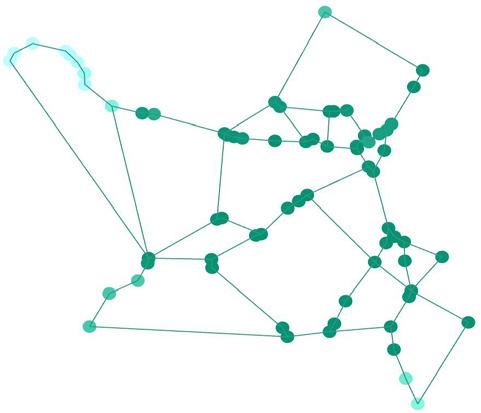
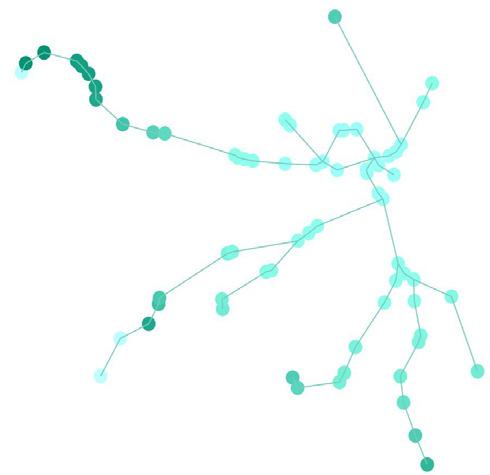
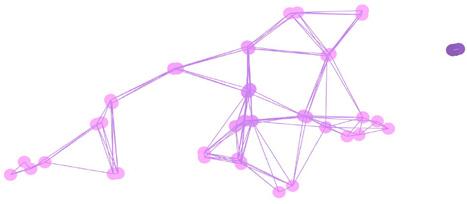
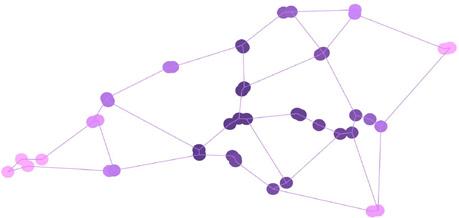
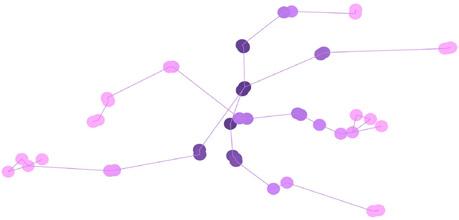
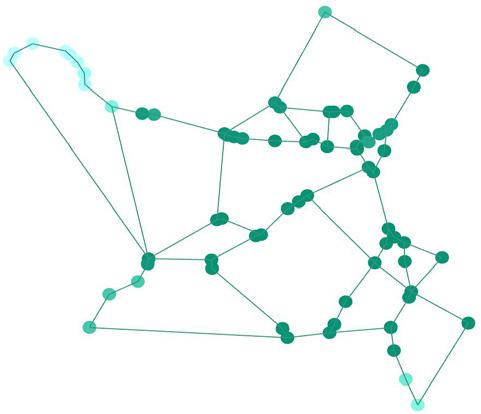
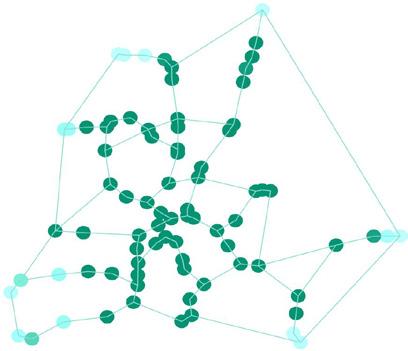
WALKING COURTYARDS
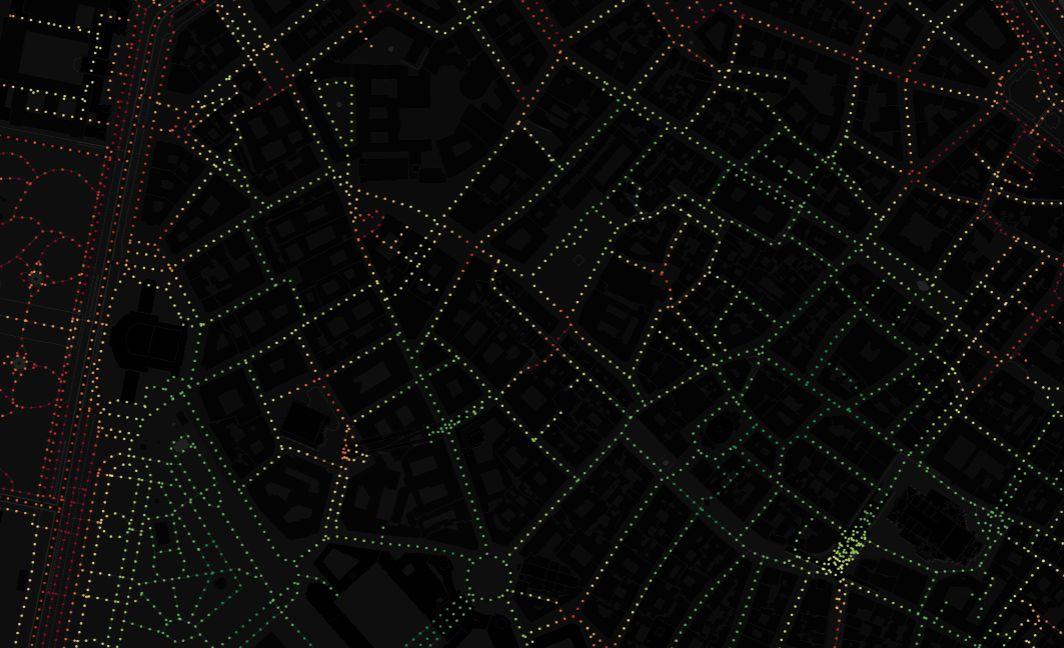
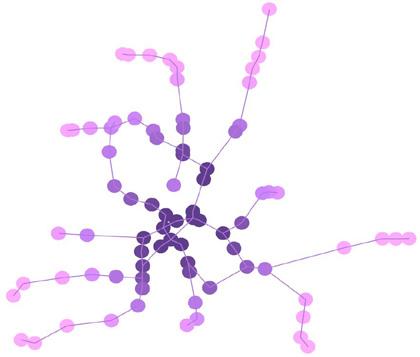
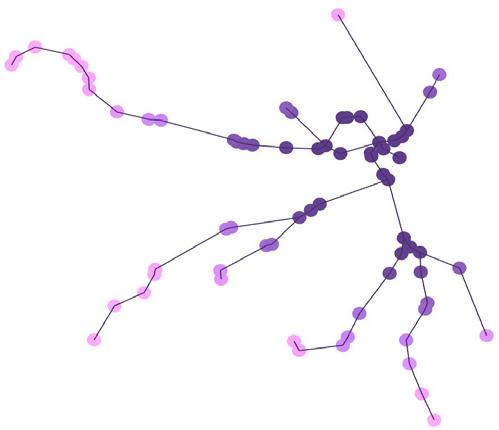
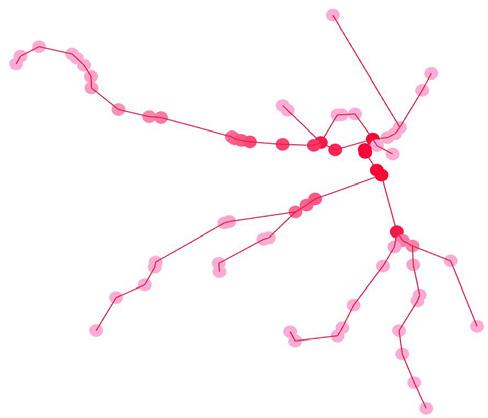
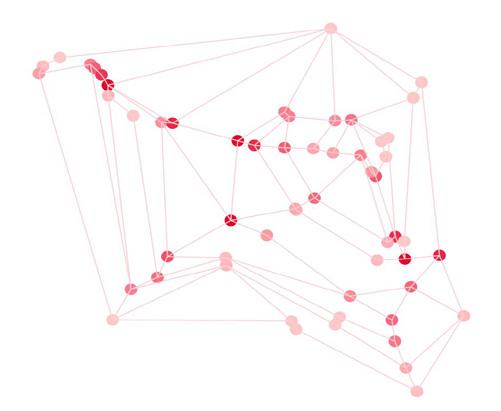
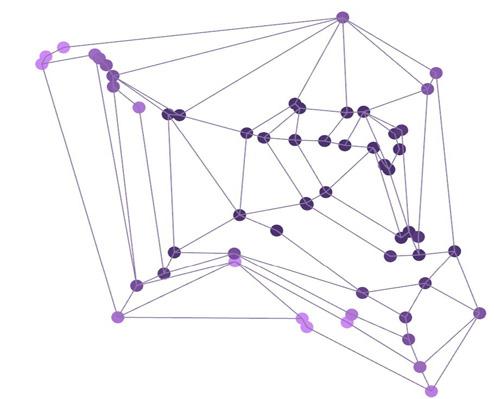
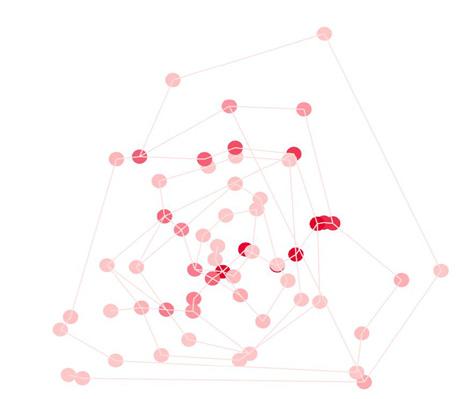
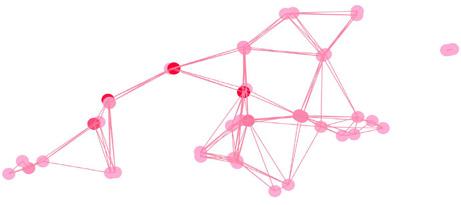
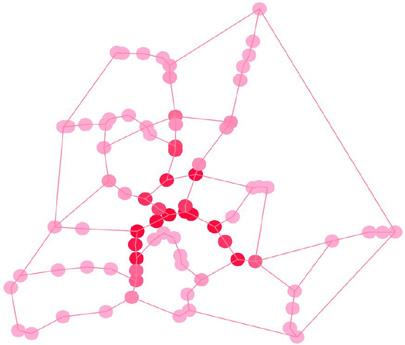
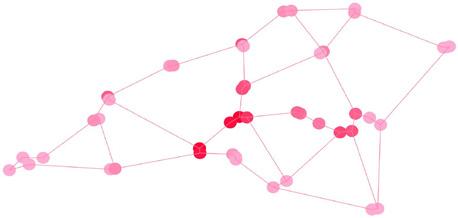
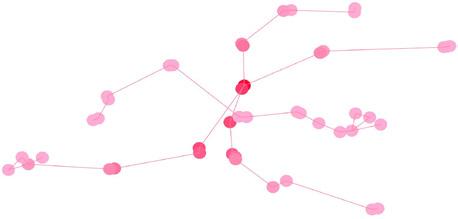
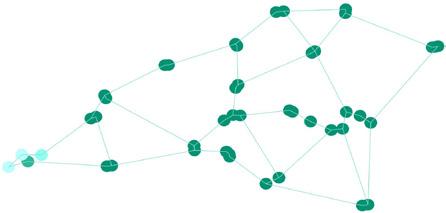
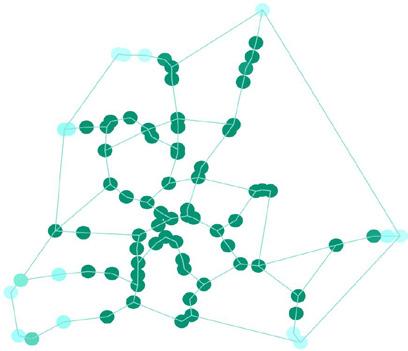
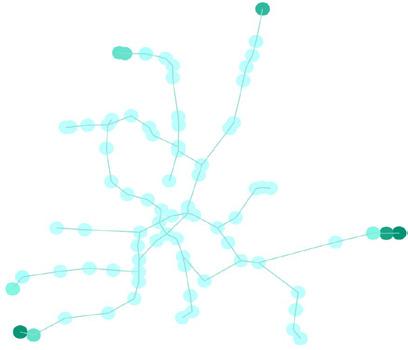
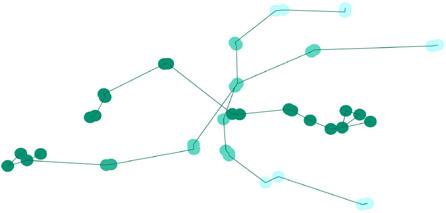
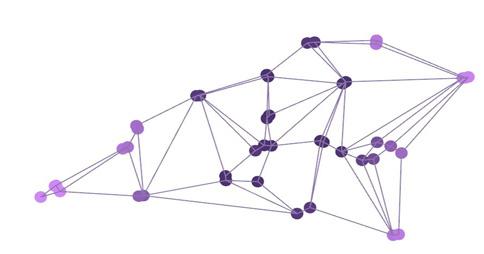
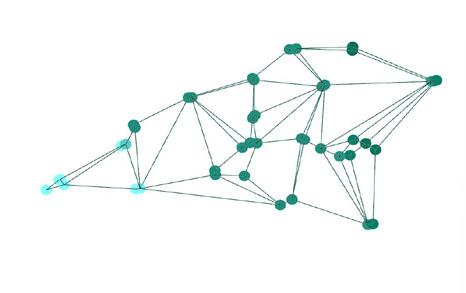
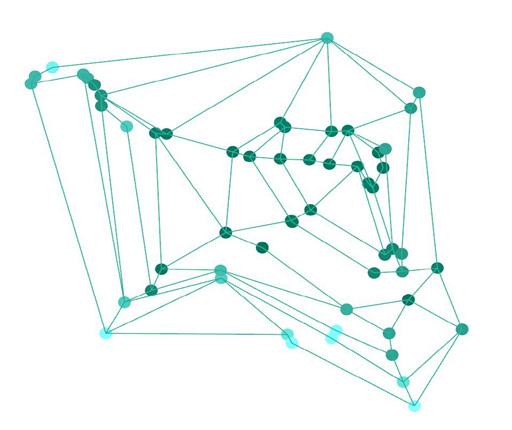
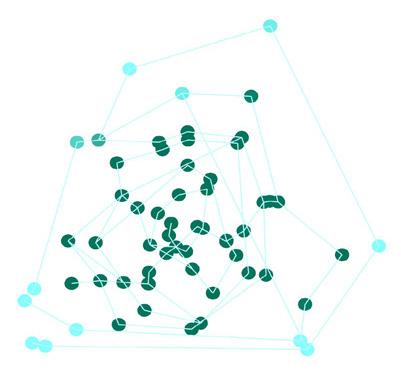
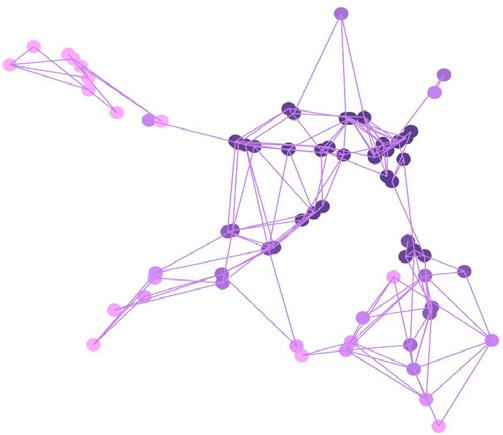
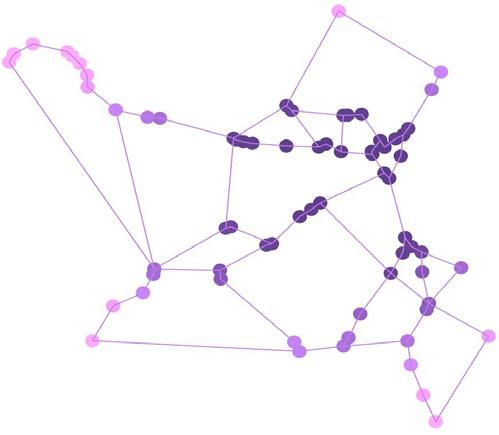
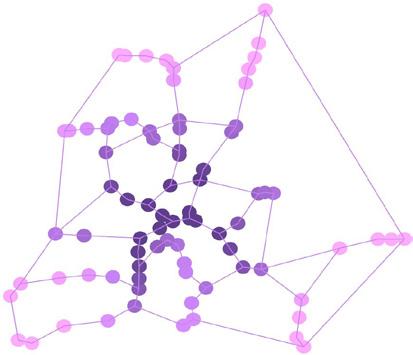
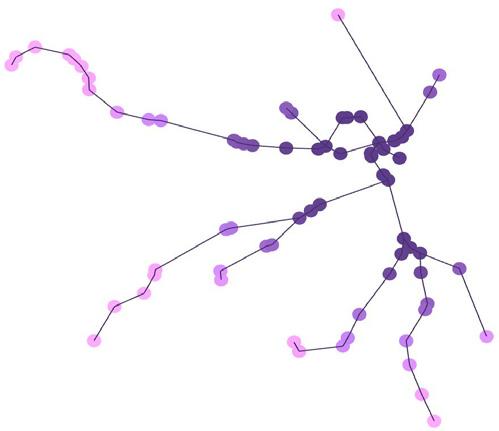
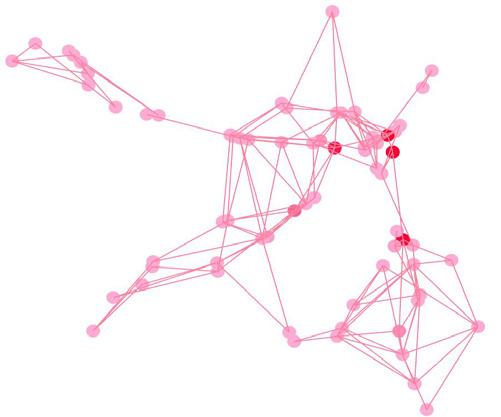
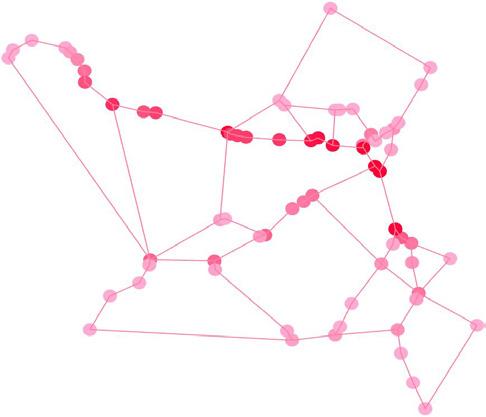
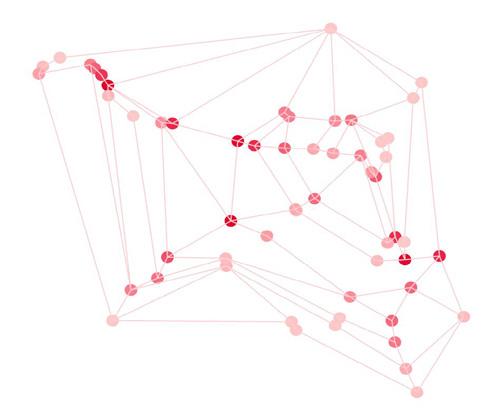
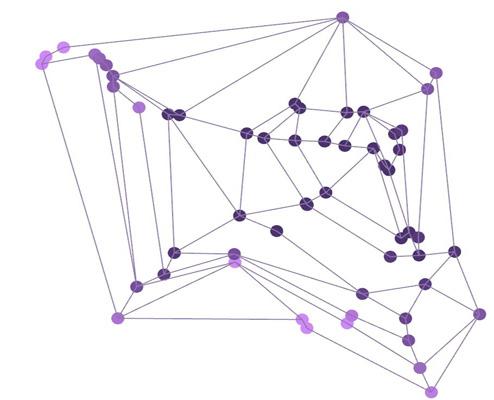
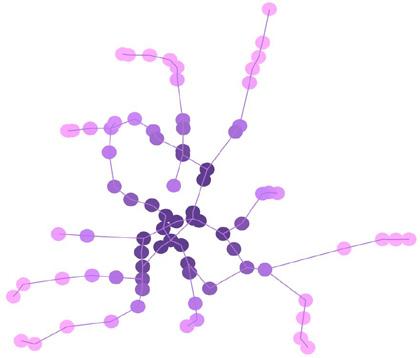
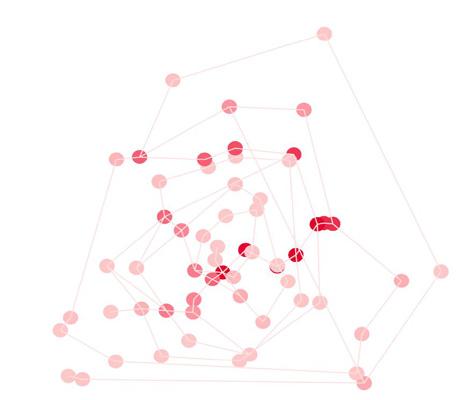
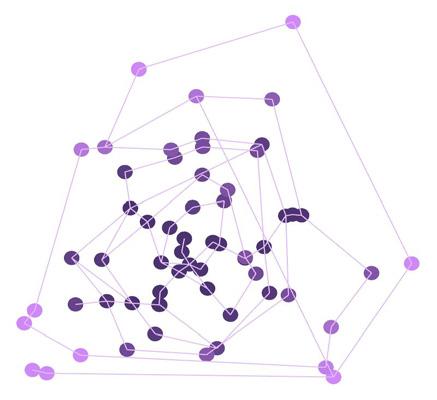
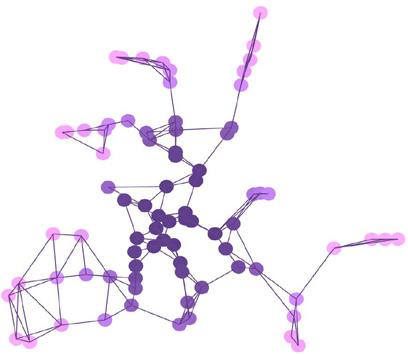
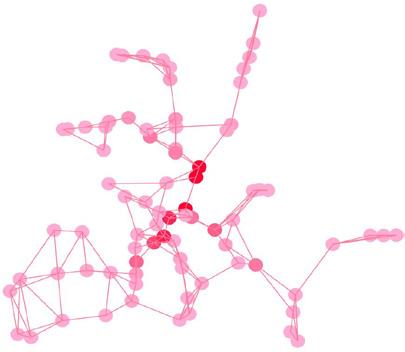
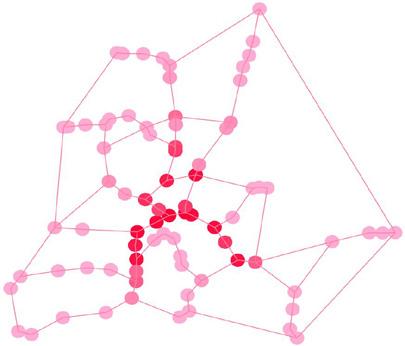
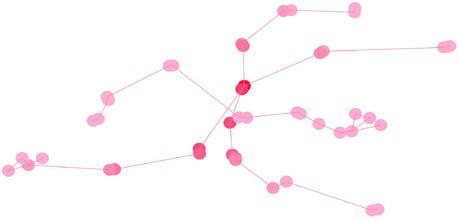
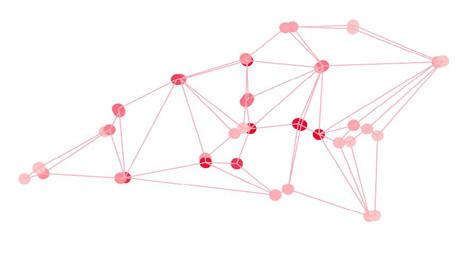
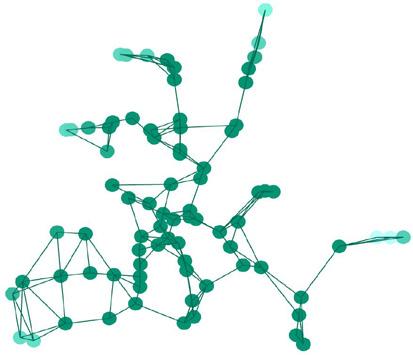
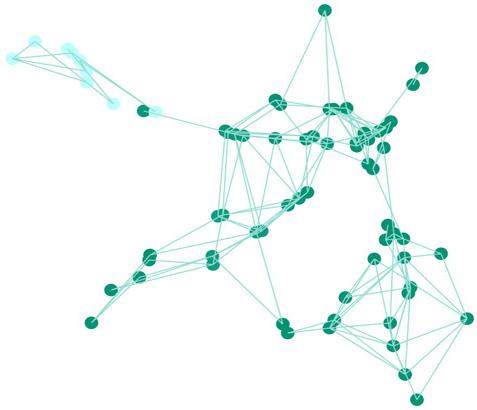
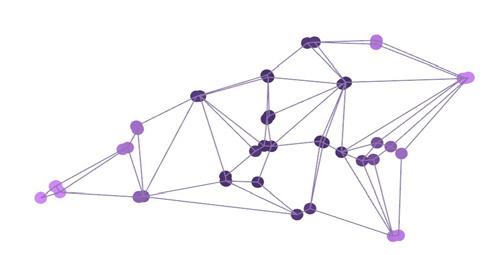
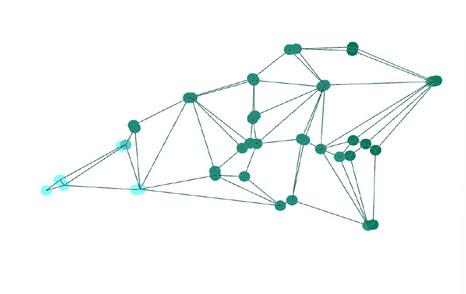
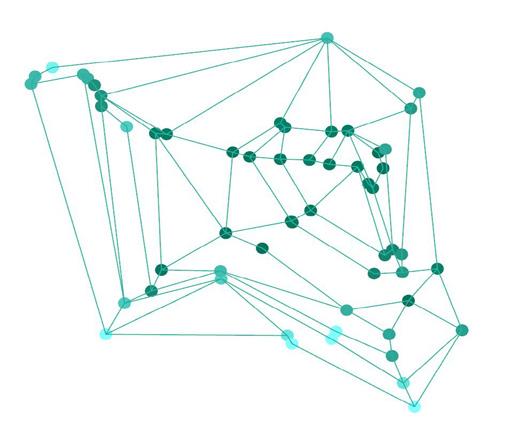
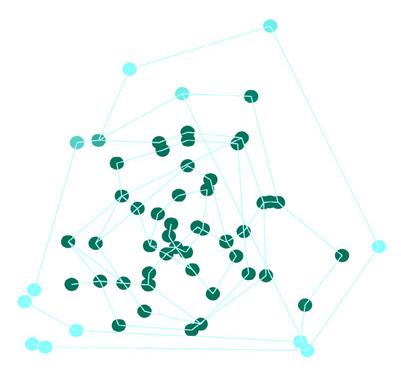
Karlskrona Network Analysis

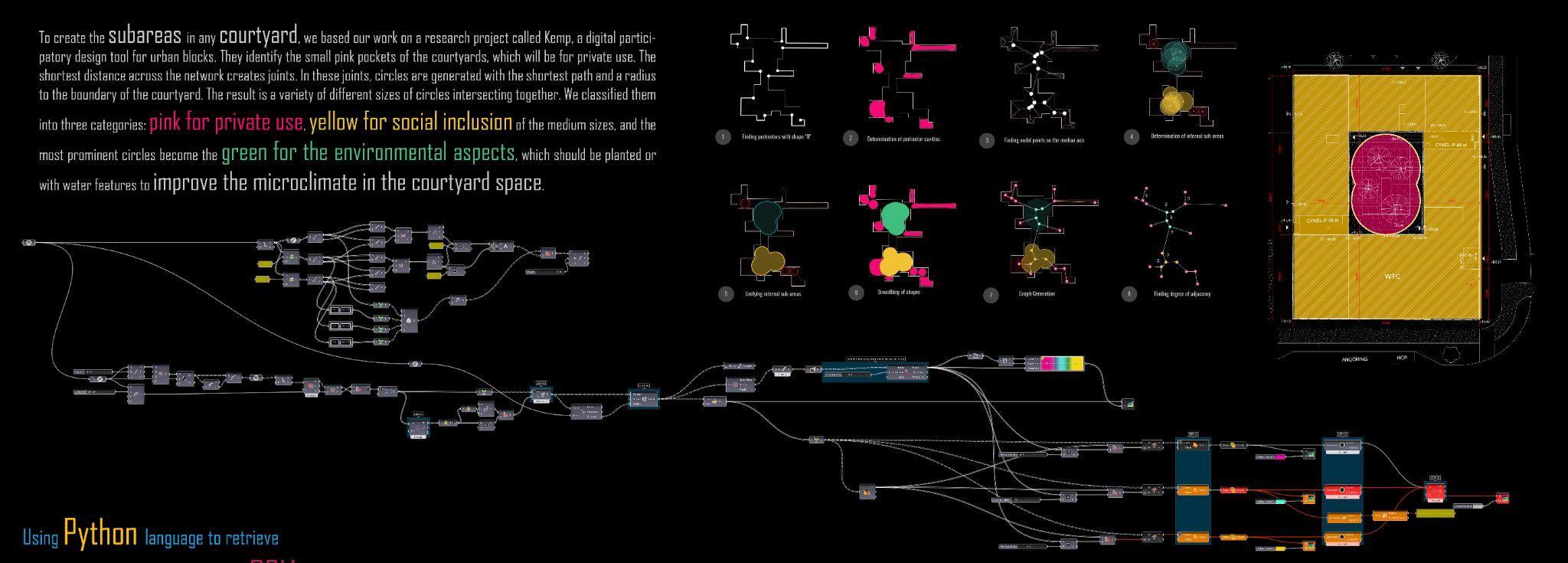
Straightness
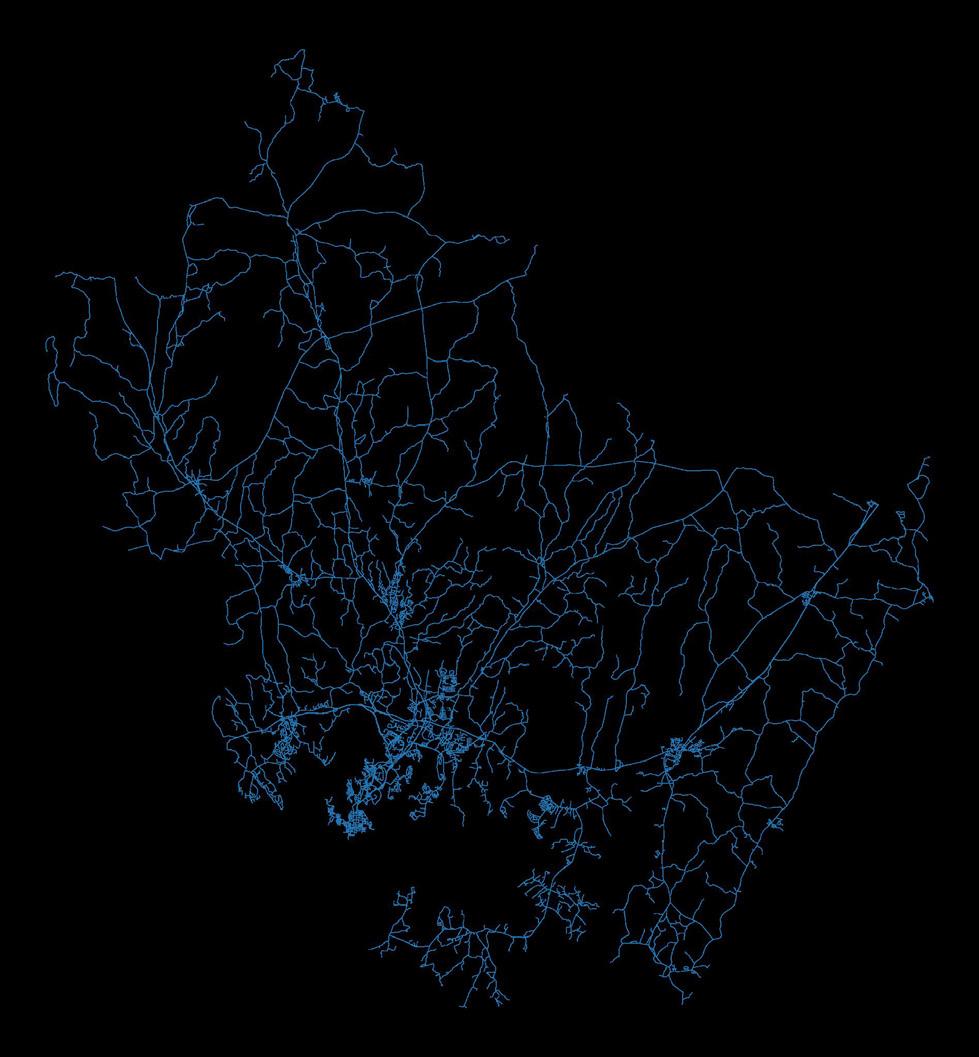
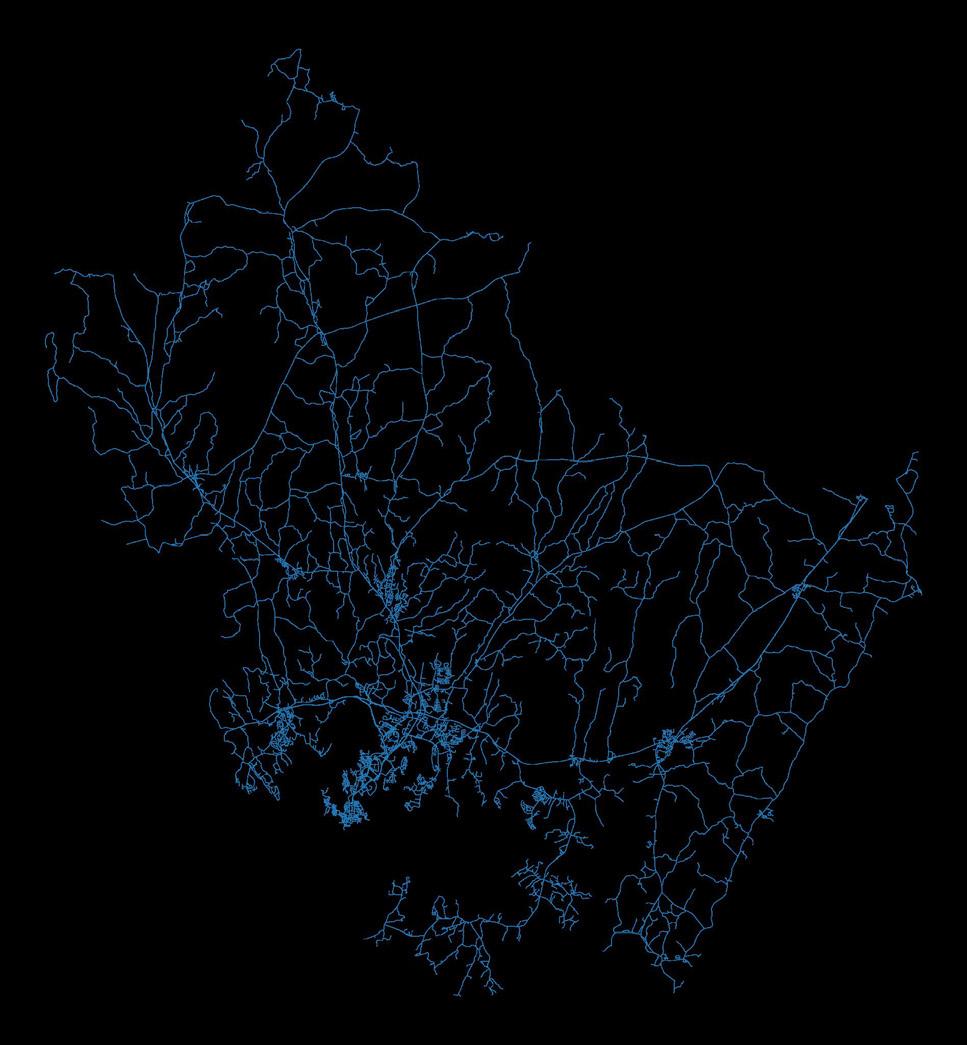
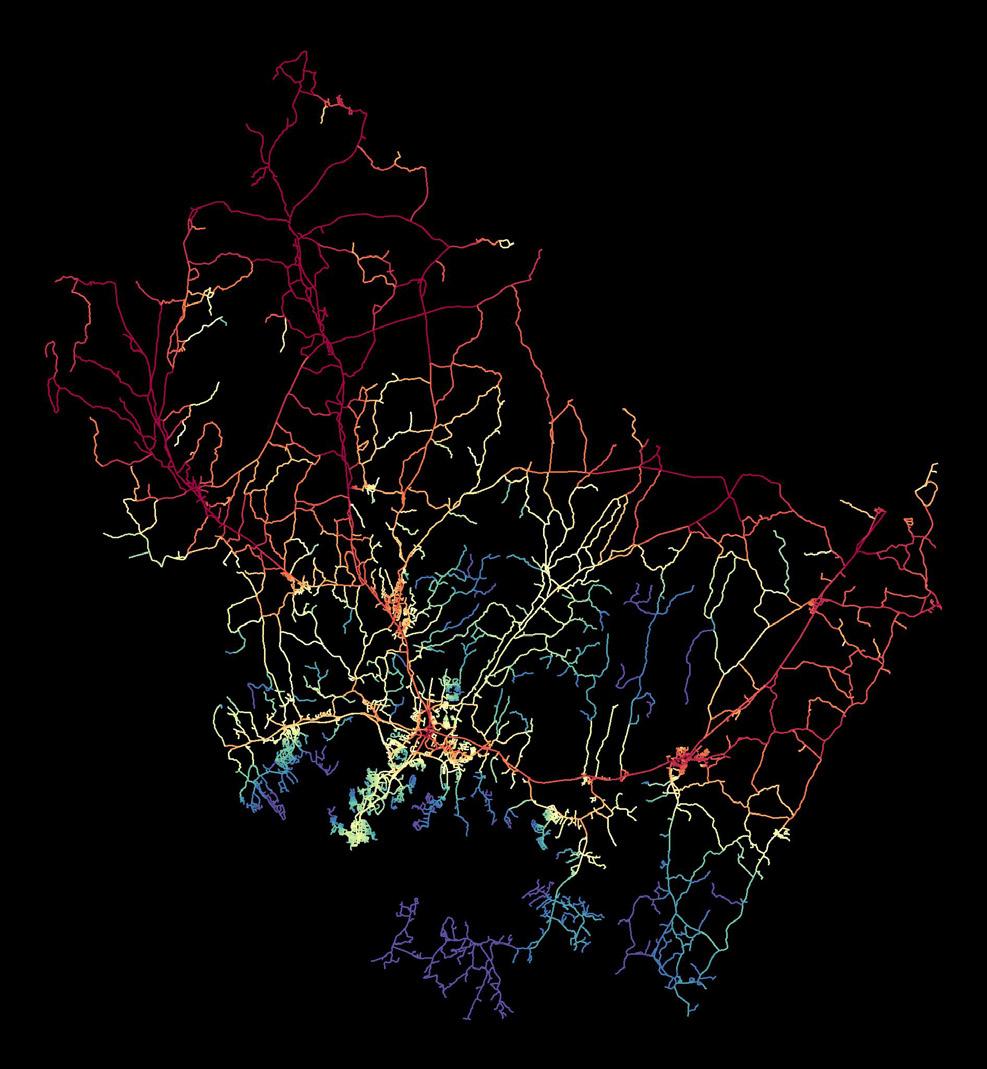

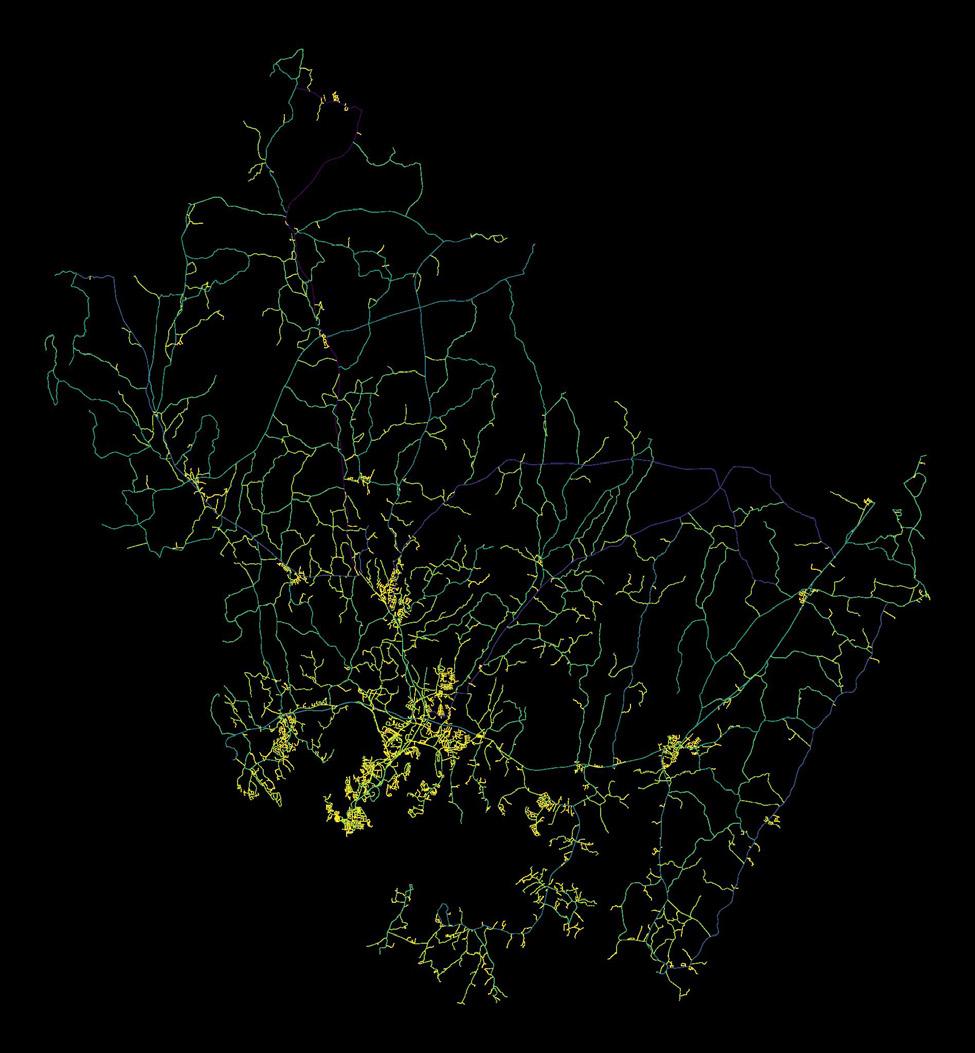

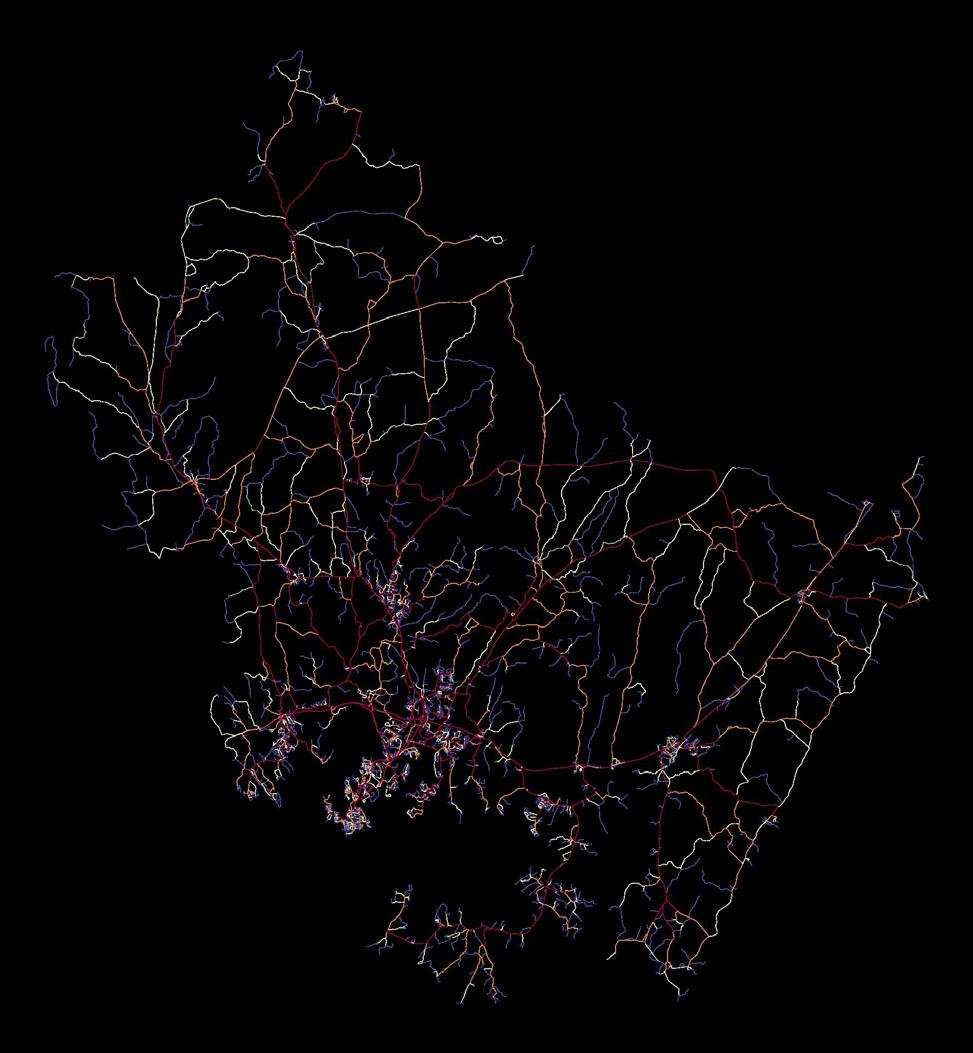
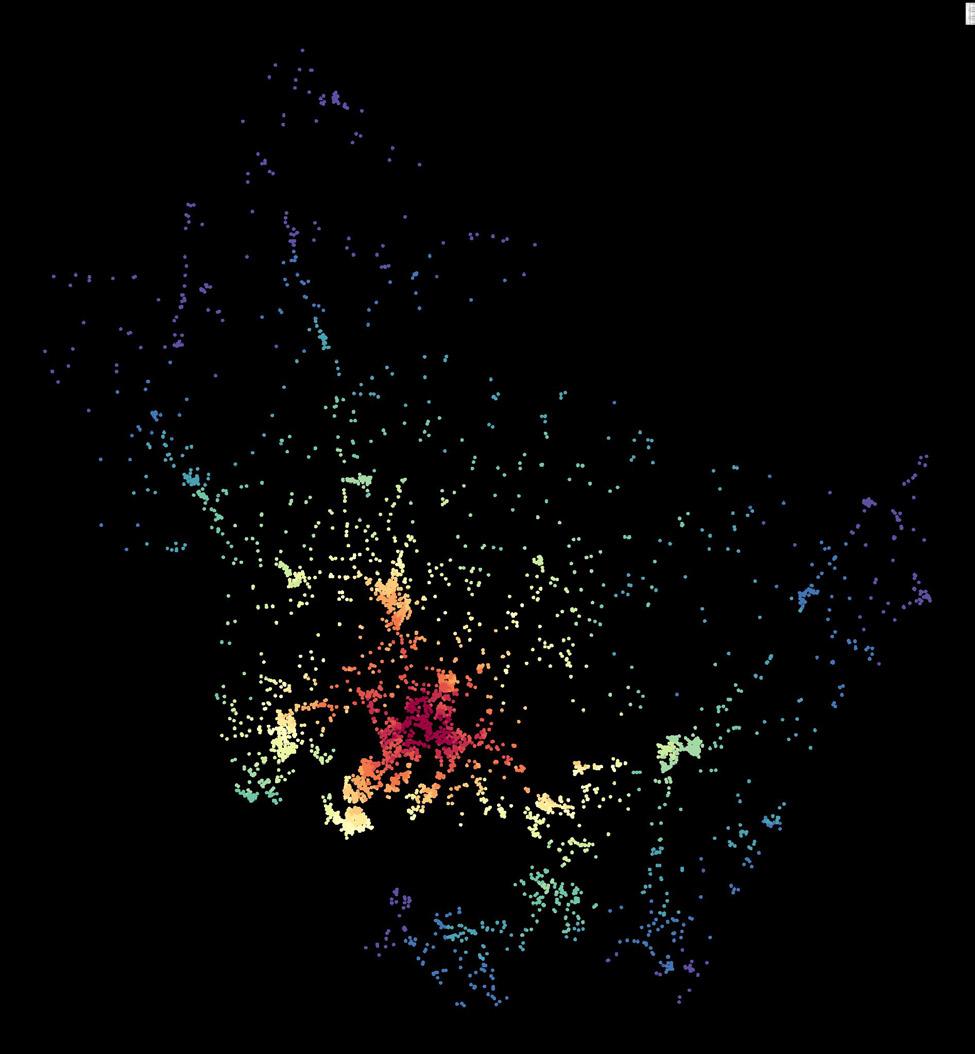
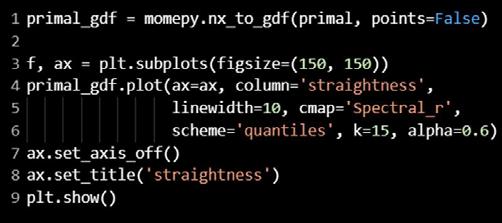
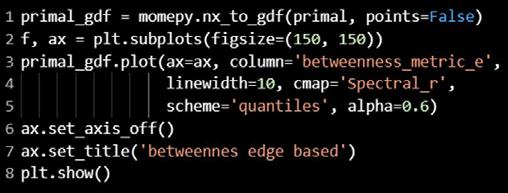
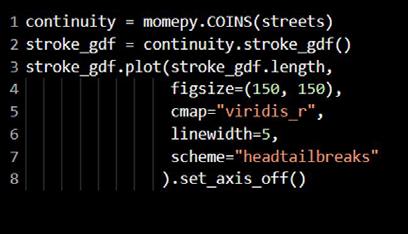

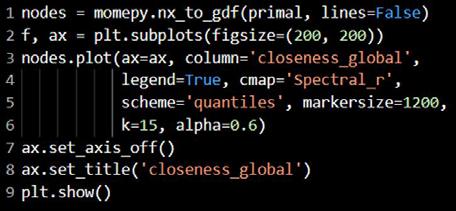
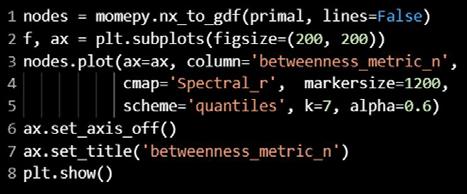
Node Values averaged onto Edges Straightness Edge-based Betweenness Continuity in Street Networks Local Closeness Global Closeness Betweenness
WALKING COURTYARDS
 Photo: Sepa Sama
Konst i Blekinge, Students and faculty from BTH, took part of the discussion after the exhibition at The World Trade Center Karlskrona.
Photo: Sepa Sama
Konst i Blekinge, Students and faculty from BTH, took part of the discussion after the exhibition at The World Trade Center Karlskrona.
EXHIBITION & WALK




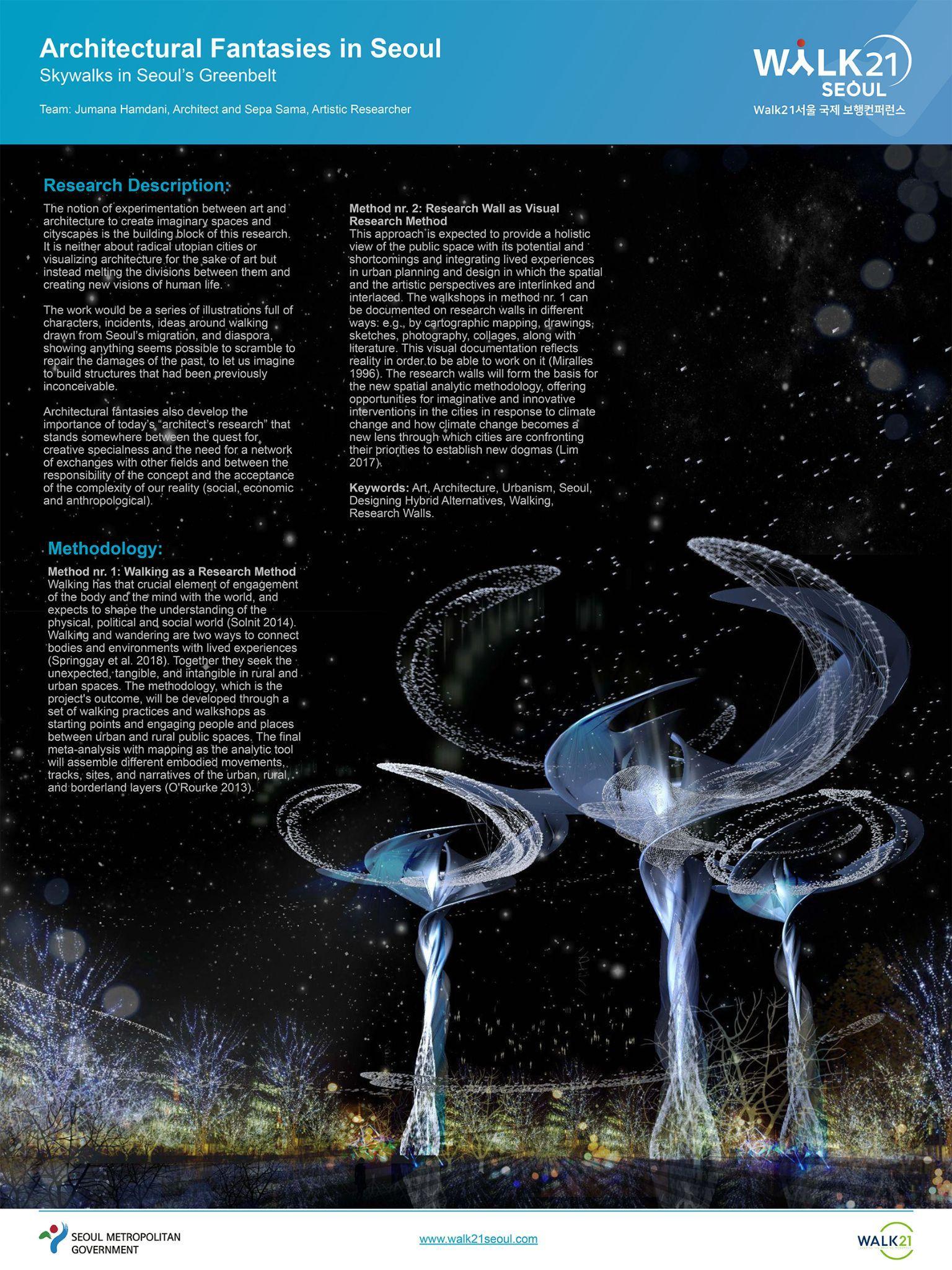
WALK 21 SEOUL CONFERENCE

06 Date: 2021
Location: Seoul, South Korea
Collaborators: Jumana Hamdani, Sepa Sama
Project Type: Won the Poster Session at Walk21 Conference
Tools: Rhino, Grasshopper, 3D Max, Photoshop
SALT PAVILION
07 Date: 2021
Location: Salar de Uyuni, Bolivia
Collaborators: Abed Badran, Jumana Hamdani
Instructor: Rodrigo Aguirre
Project Type: Academic at IAAC
Tools: Rhino,Grasshopper including plugins: Voronoi, Kangaroo, Wallacei, 3D Max, Photoshop
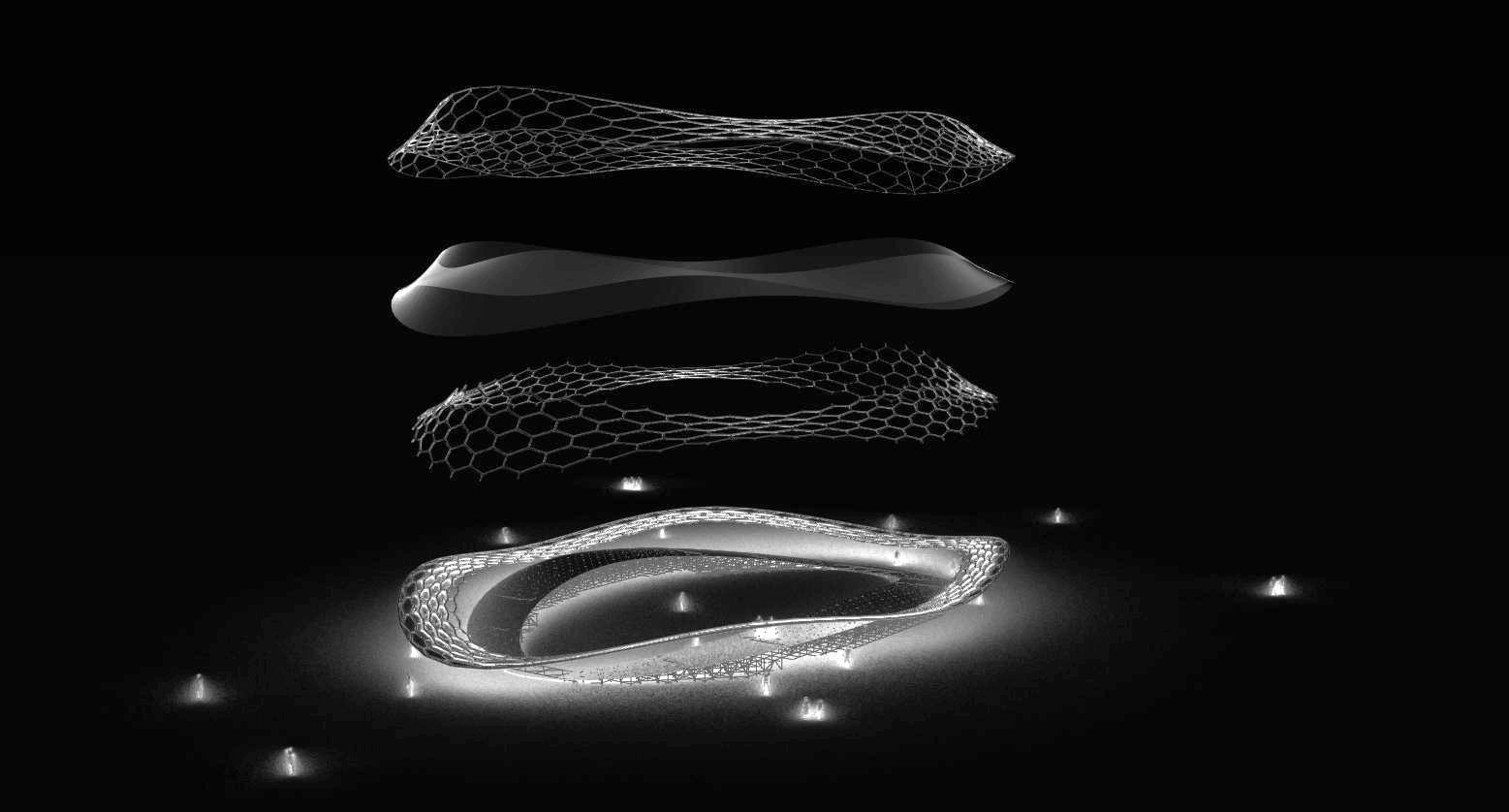
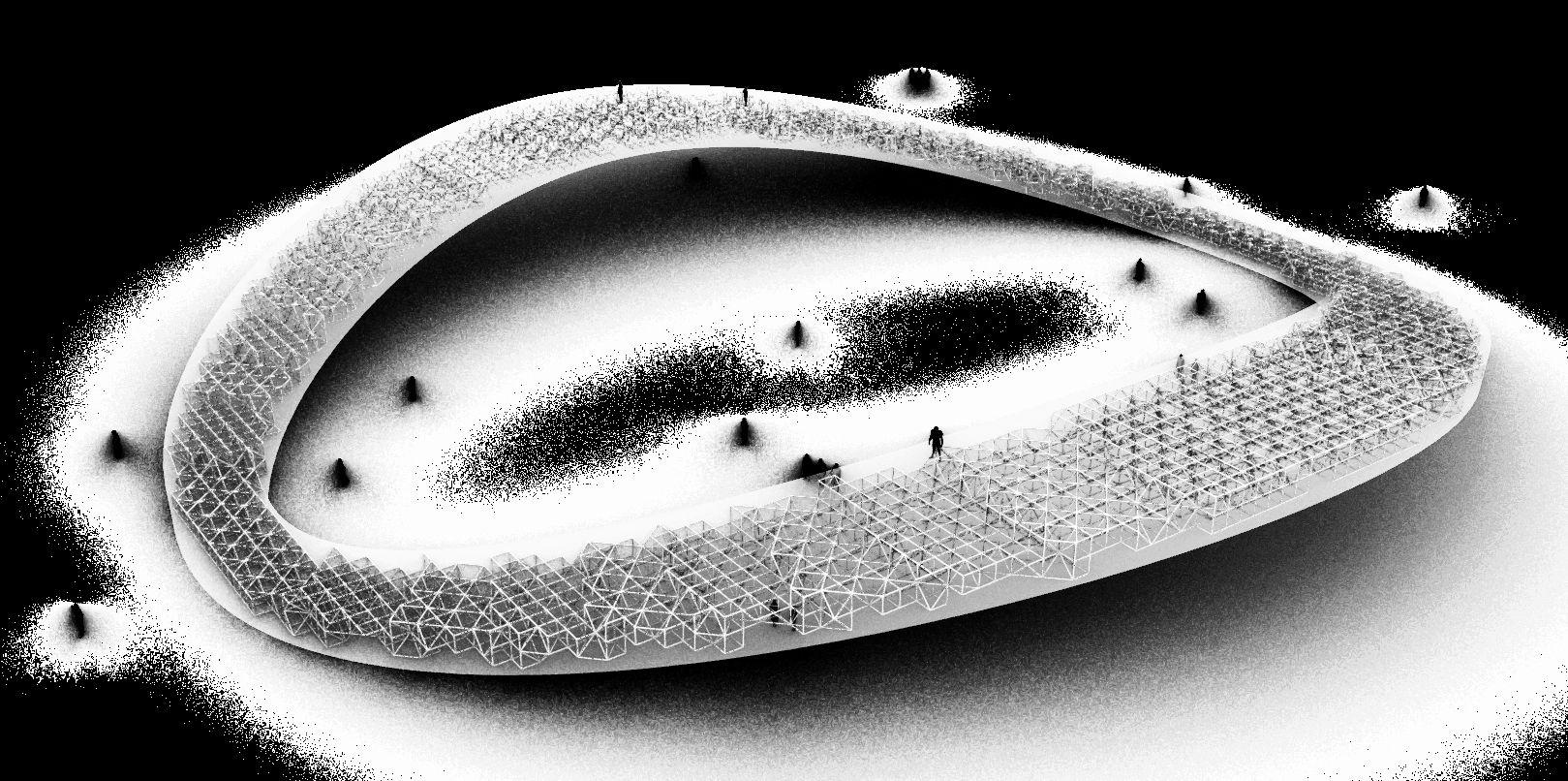
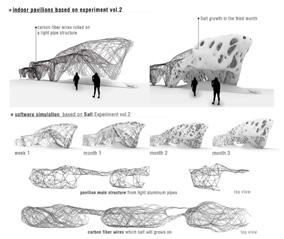
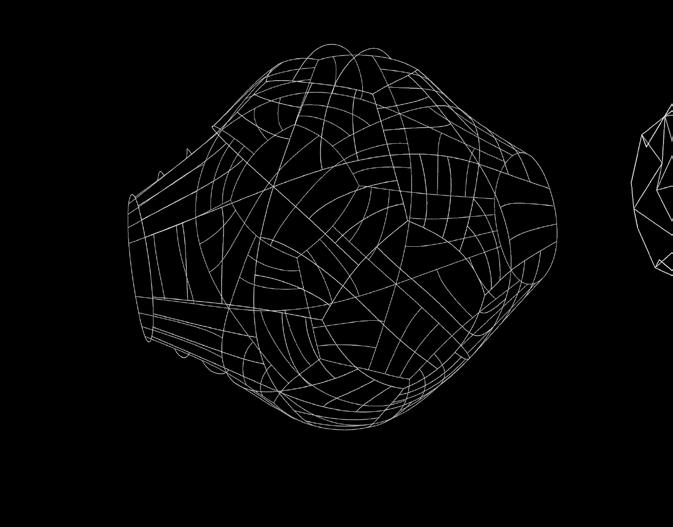
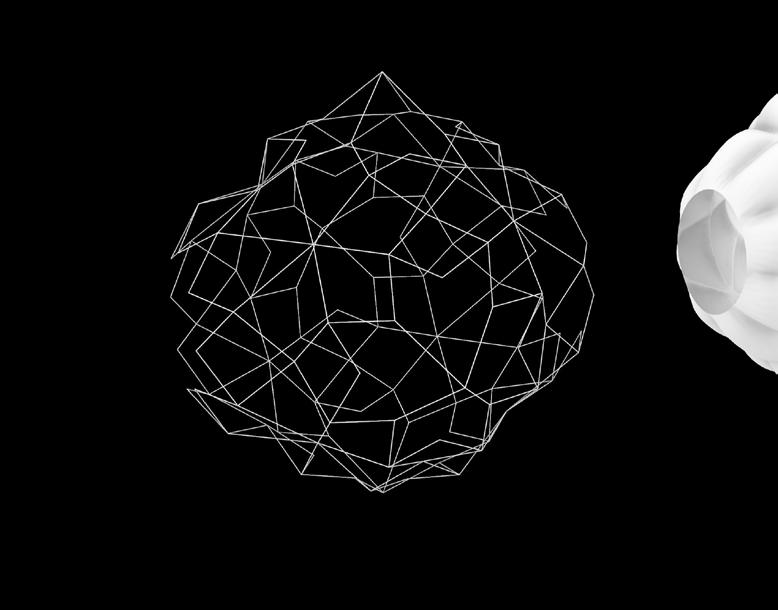
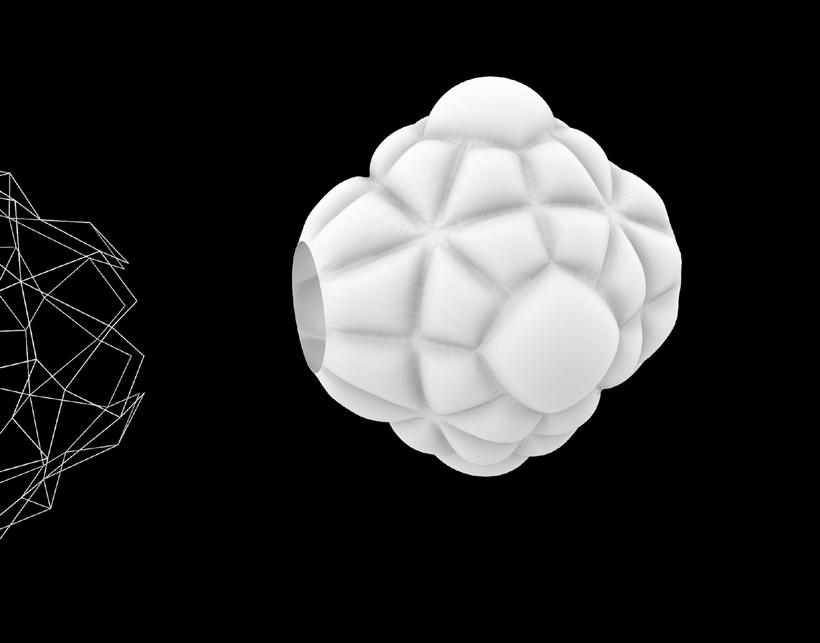
SALT PAVILION
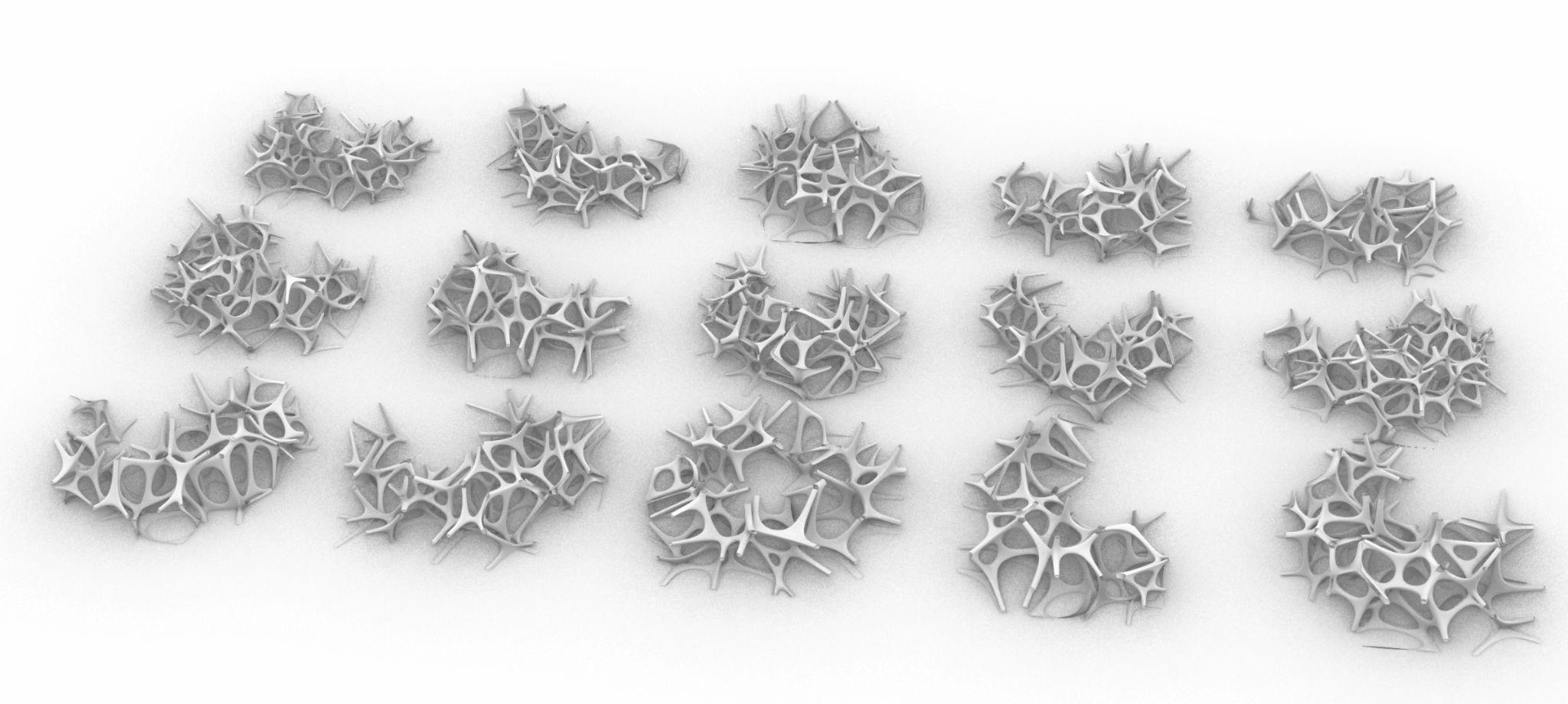
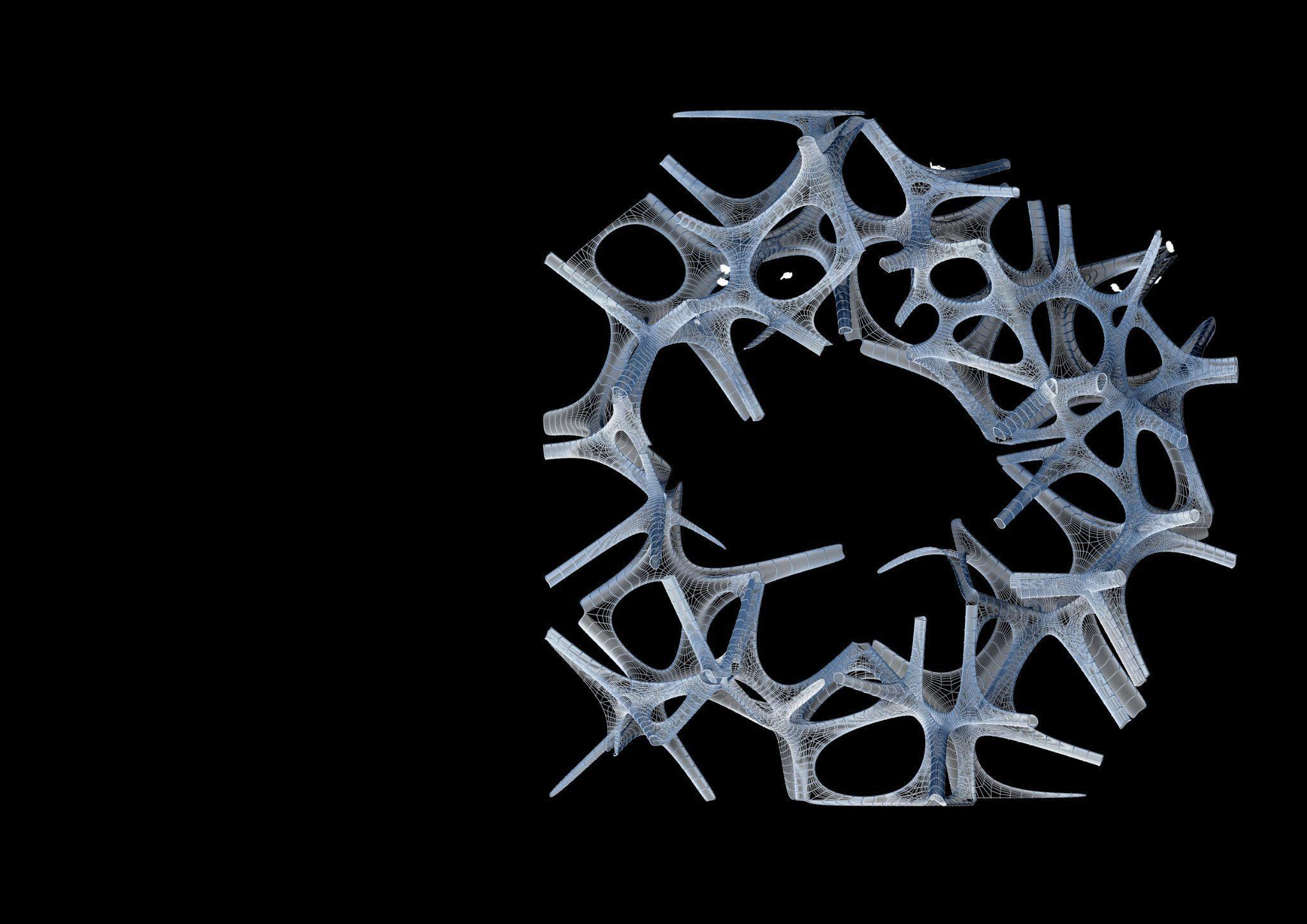
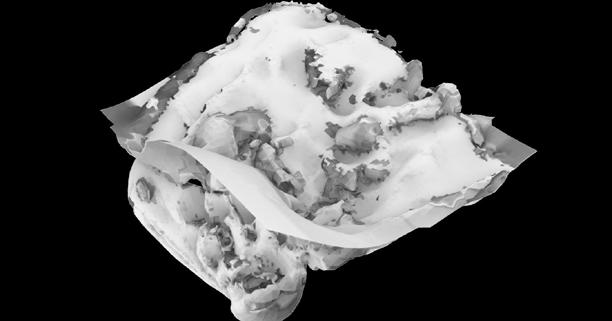
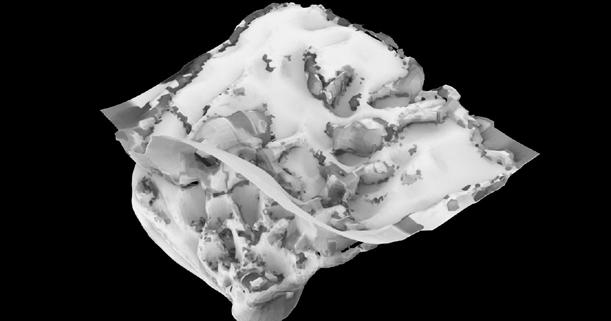
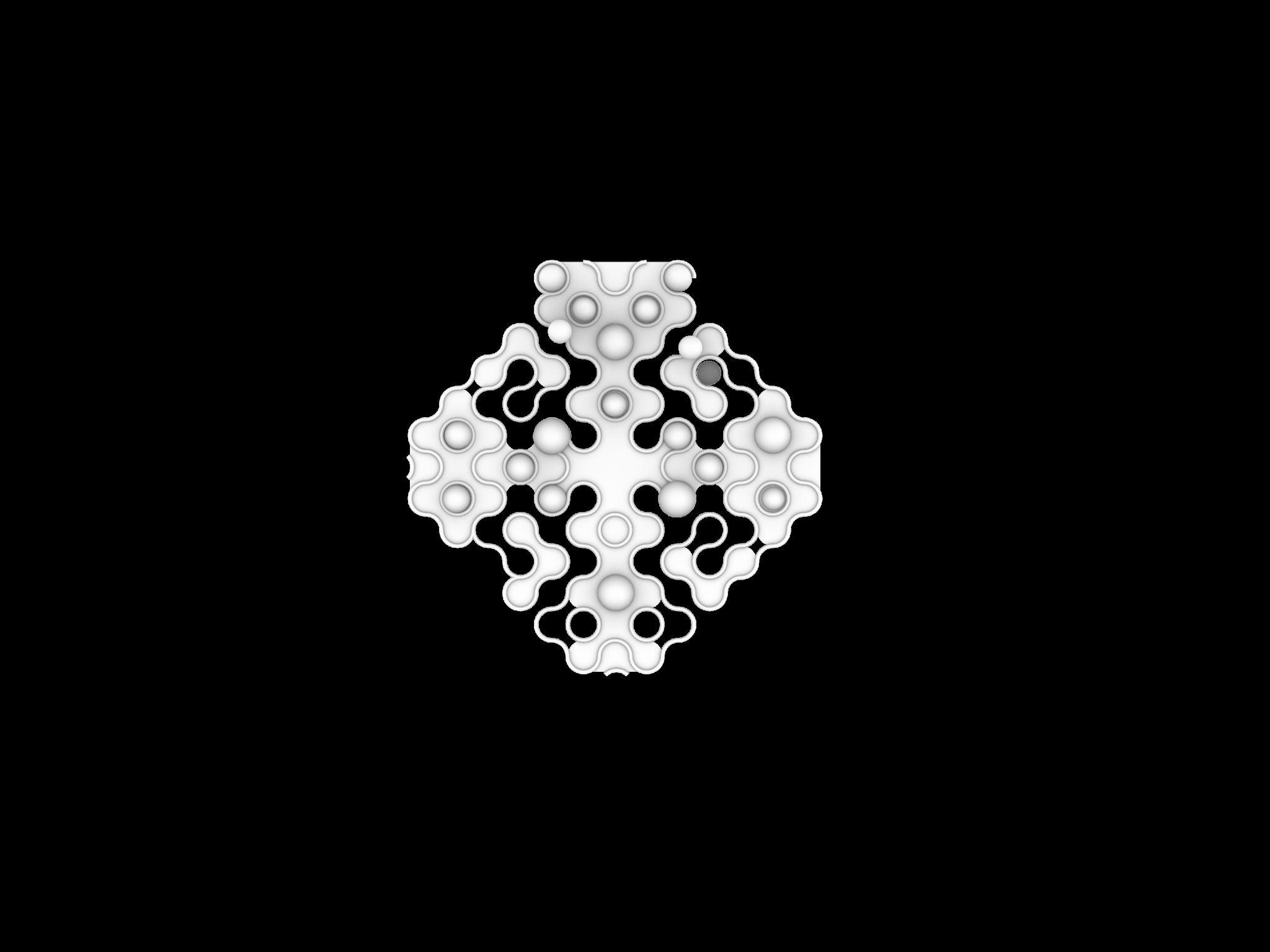
, Bolivia exploring the natural system of the cancellous spongy bone structure. The purpose of the project is to define a new urban structure, using Salt as a local material that can evolves through time.
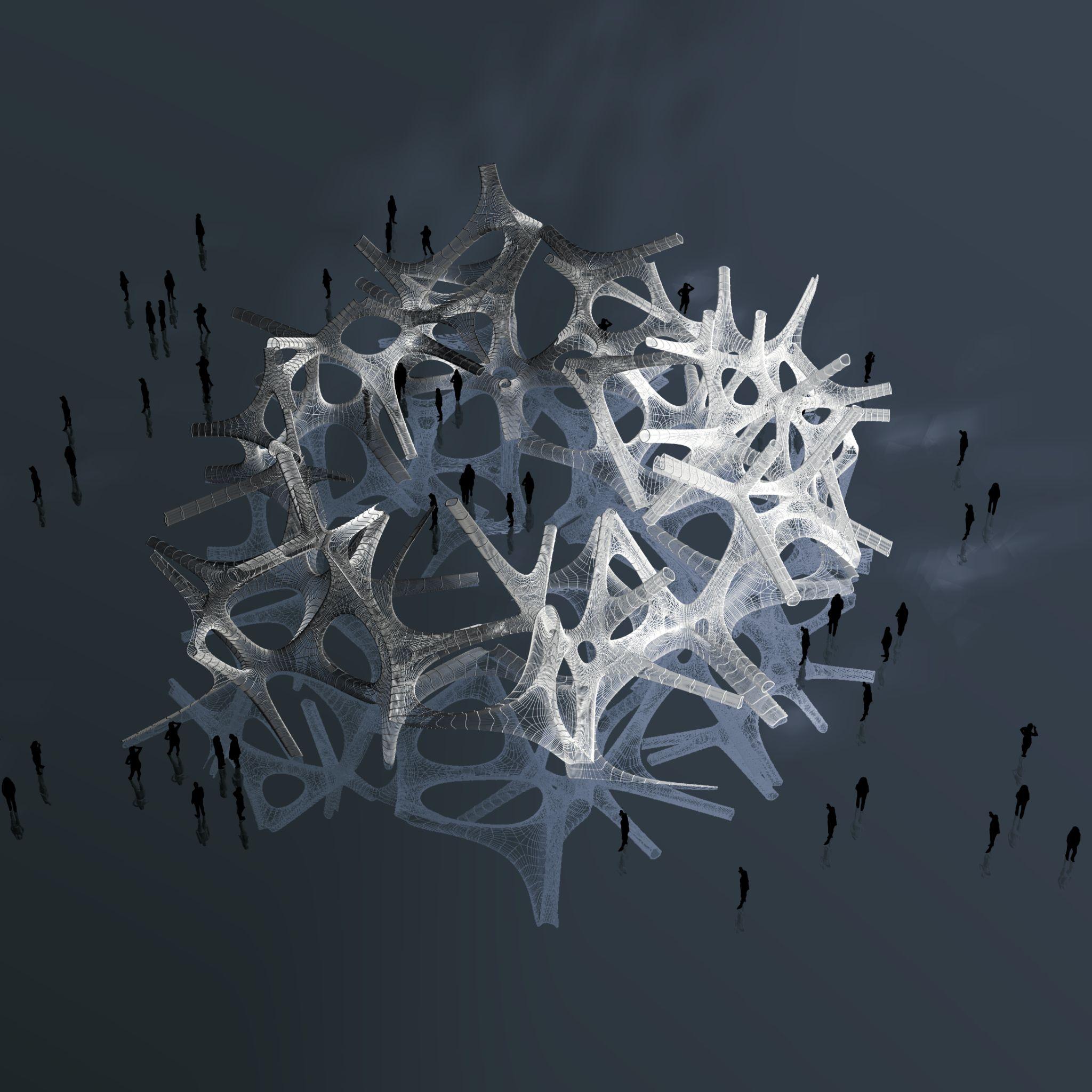


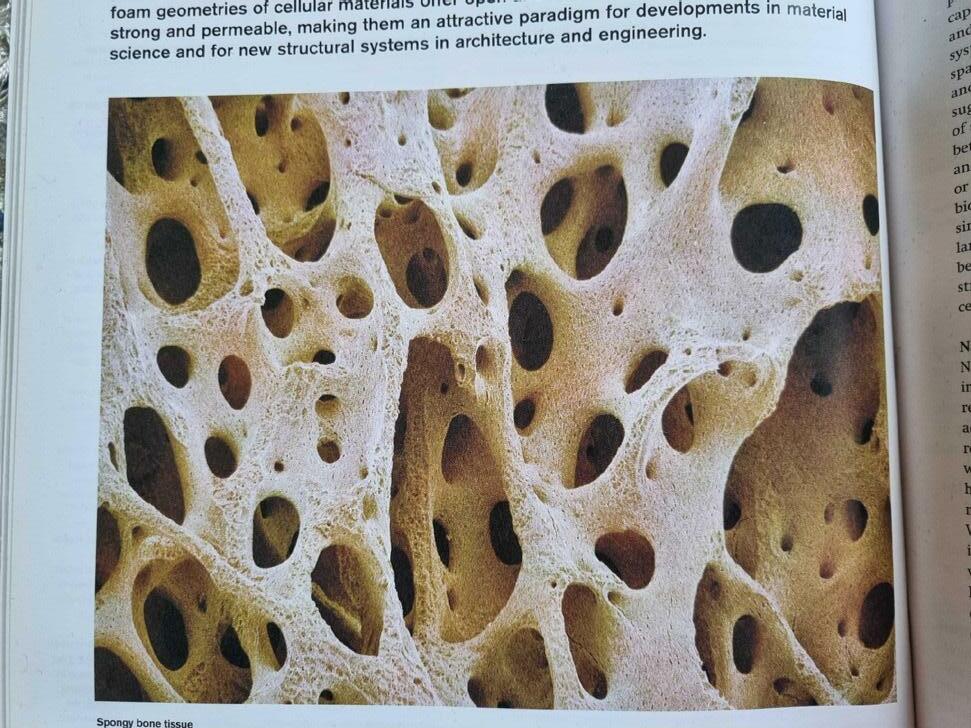







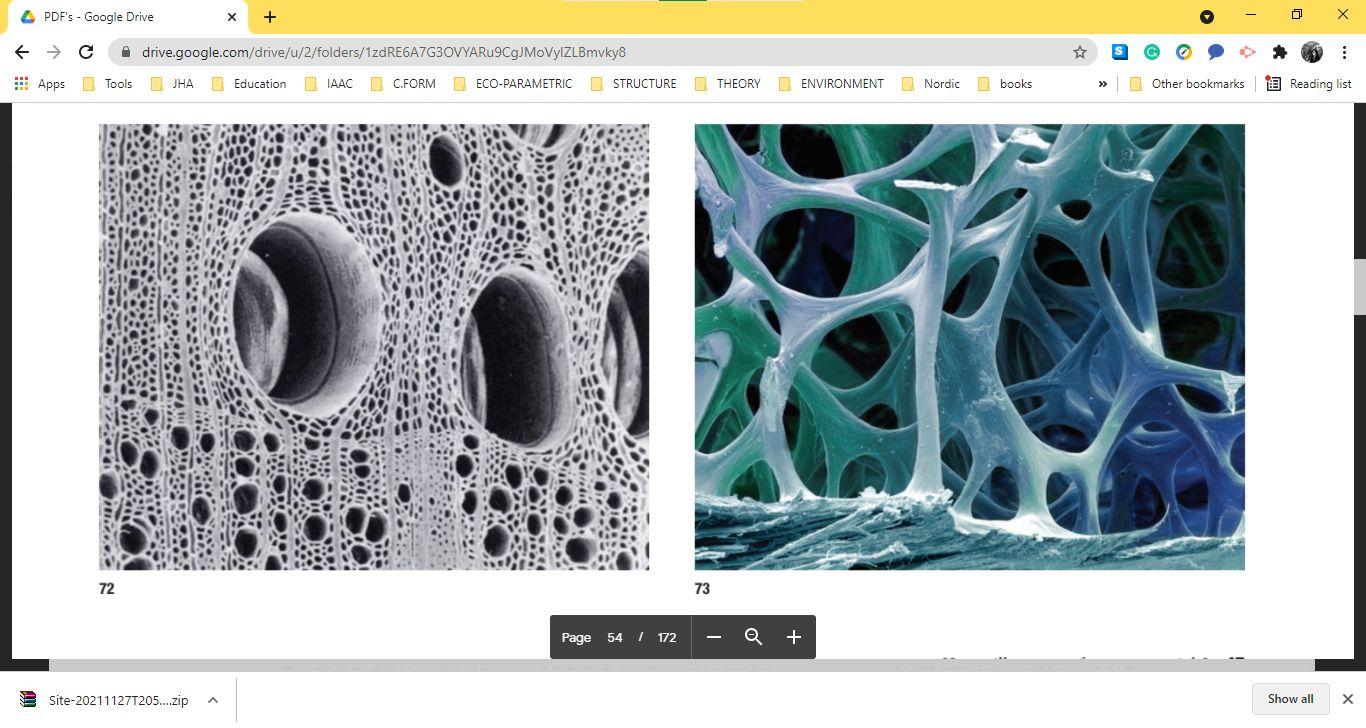
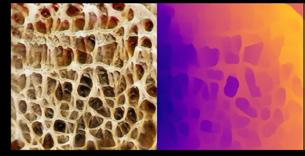
BONE TISSUE
structure Cancellous bone, also called trabecular or spongy bone, is the internal tissue of the skeletal bone and is an open cell porous network. Cancellous bone has a higher surface-area-to-volume ratio than cortical bone and it is less dense. Scanning electron micrograph of cancellous (spongy) bone tissue NATURAL SYSTEM INSPIRATION BONE FUNCTIONS CA C Structure Framework Protect Major Organs STORAGE LIGHT WEIGHT PROTECTION PROVIDE BALANCE Enabling muscle attachment and movement Mineral Reservoir Trap dangerous materials STABILITY MATERIAL SAVING CO2 REDUCTION DURABILITY Why Bone Structures In design? SUPPORT MOVEMENT The words cancellous and trabecular refer to the tiny lattice-shaped units (trabeculae) that form the tissue.
The cell behaviour found in the formation of bones takes on the natural regulation of cells based around voronoi arrangement of geometry. Similarities in form can also be seen in various systems throughout nature. SALT PAVILION
CANCELLOUS
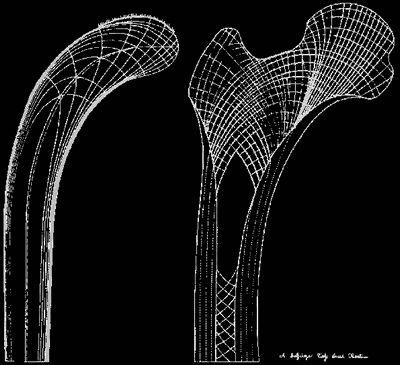
Hierarchical
BONE ANALYSIS
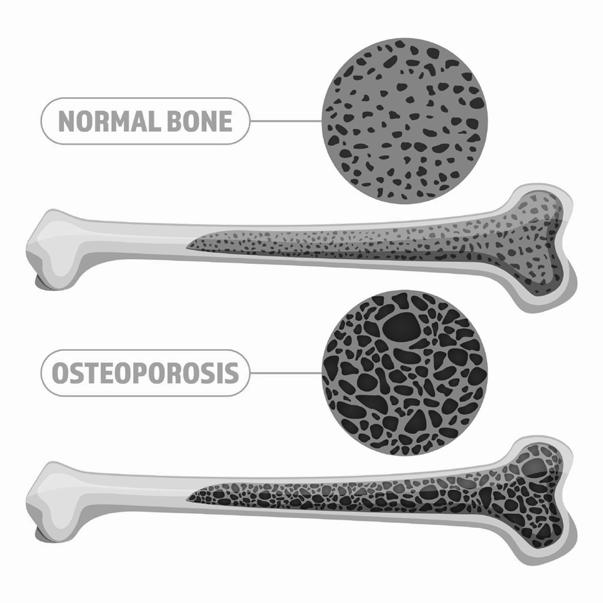
BONE STRUCTURAL BEHAVIOUR
Wolff's Law
The bone is a hierarchical structure of calcium phosphate and collagen molecules in fibrous, laminar, particulate and porous form.
Secondary tensile stress
Muscles Tension load Point of no Stress
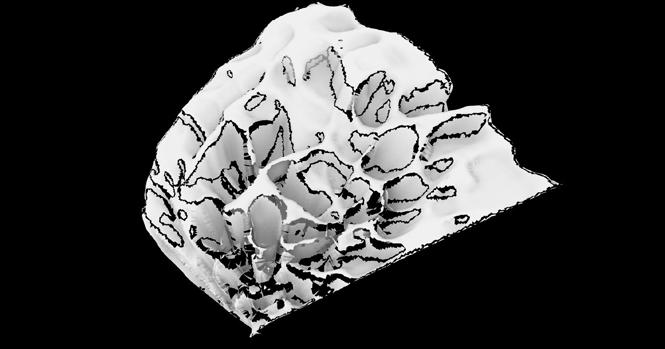
COMPUTATIONAL ANALYSIS OF BONE FRACTURE
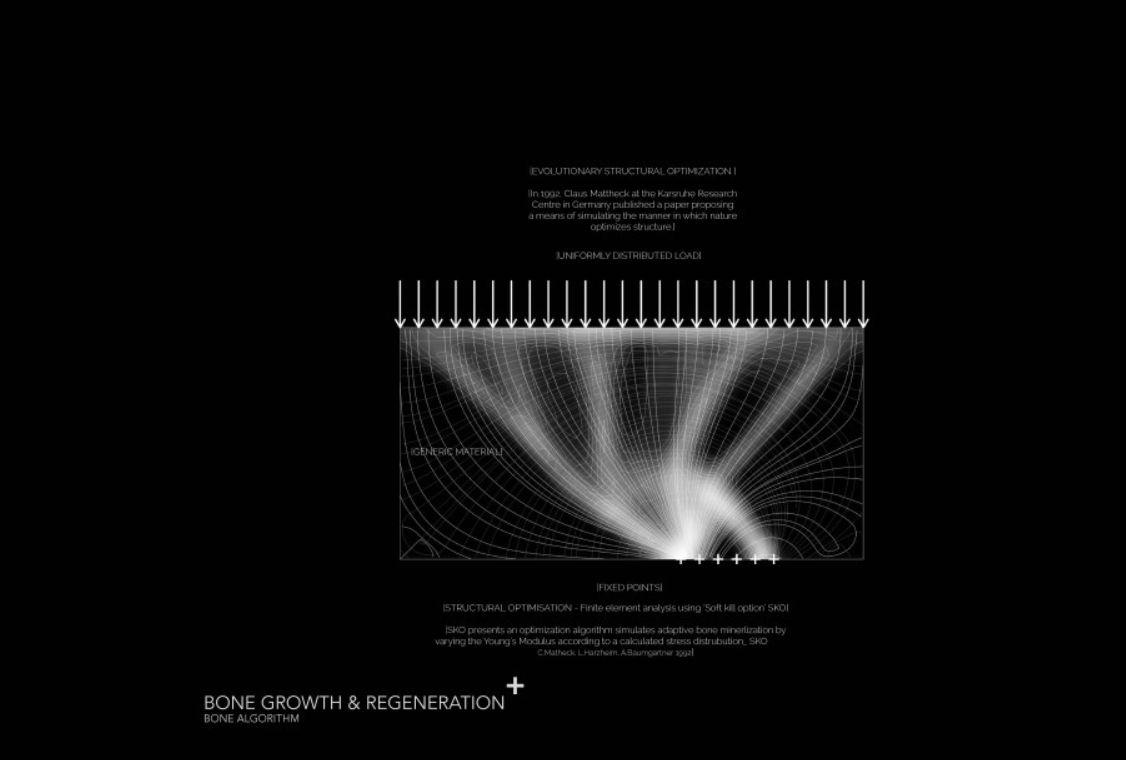
The goal is to understand the structural behaviour of the spongy bone, in order to extract an algorithm that can be applied to influence the formation of the Pavilion
Cell Regulation
Minimal pathing systems for force distribution
Uniformly distributed loads
Fixed Points
SKO (soft kill option) The biological way to find an optimum structure topology, C.Mattheck.
LEVELS OF HIERARCHY
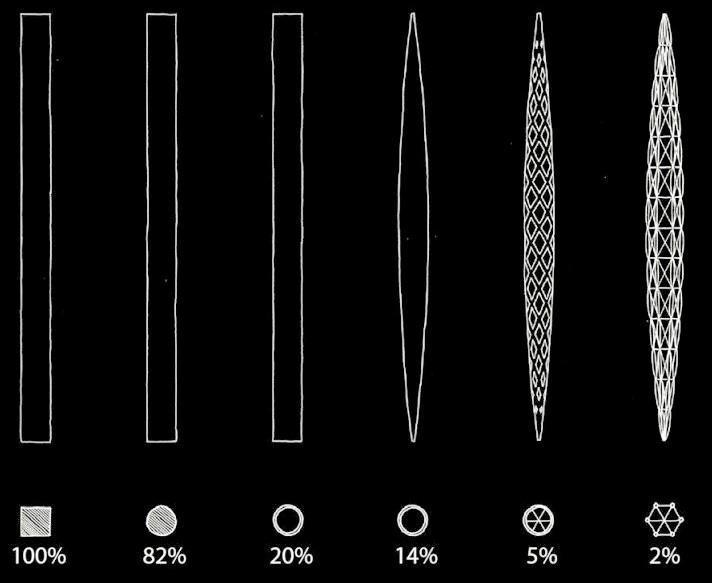
The use of mass and void in the structure Nature organises structure and materials together through hierarchy.
MATERIAL EFFICIENCY
100% 82% 20% 14% 5% 2%
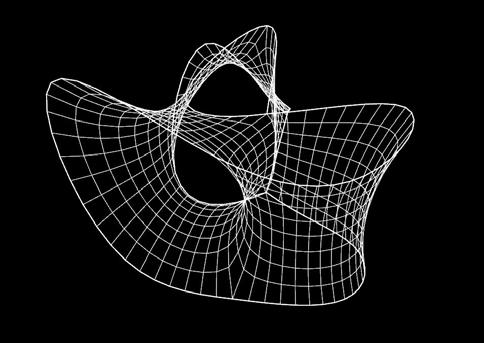
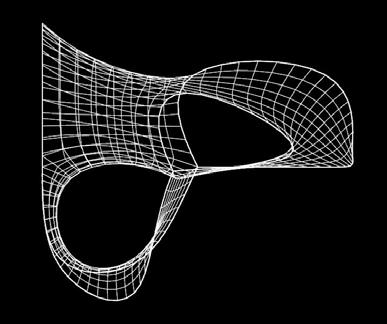
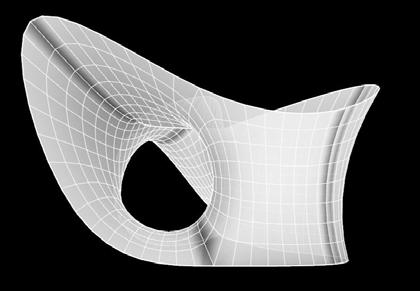
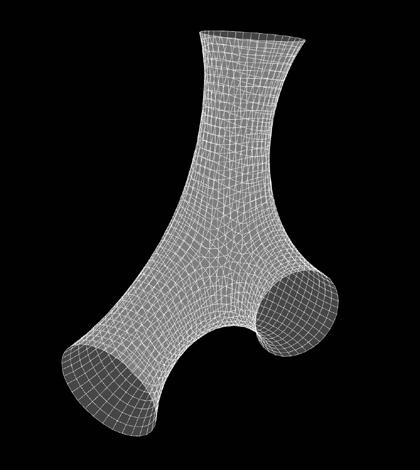
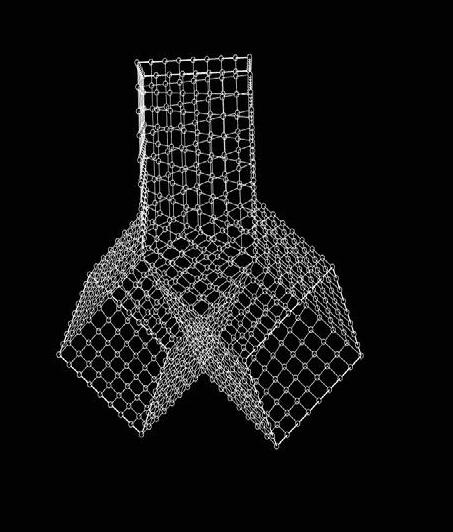
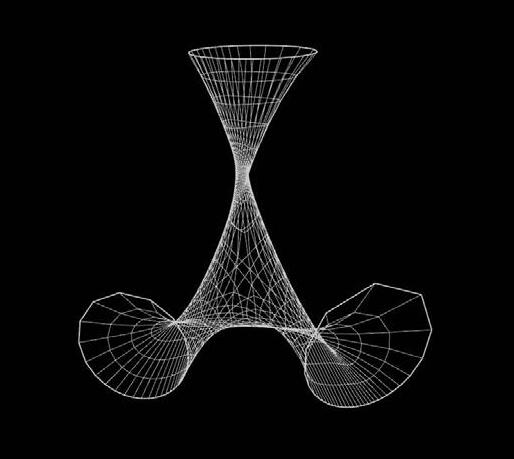



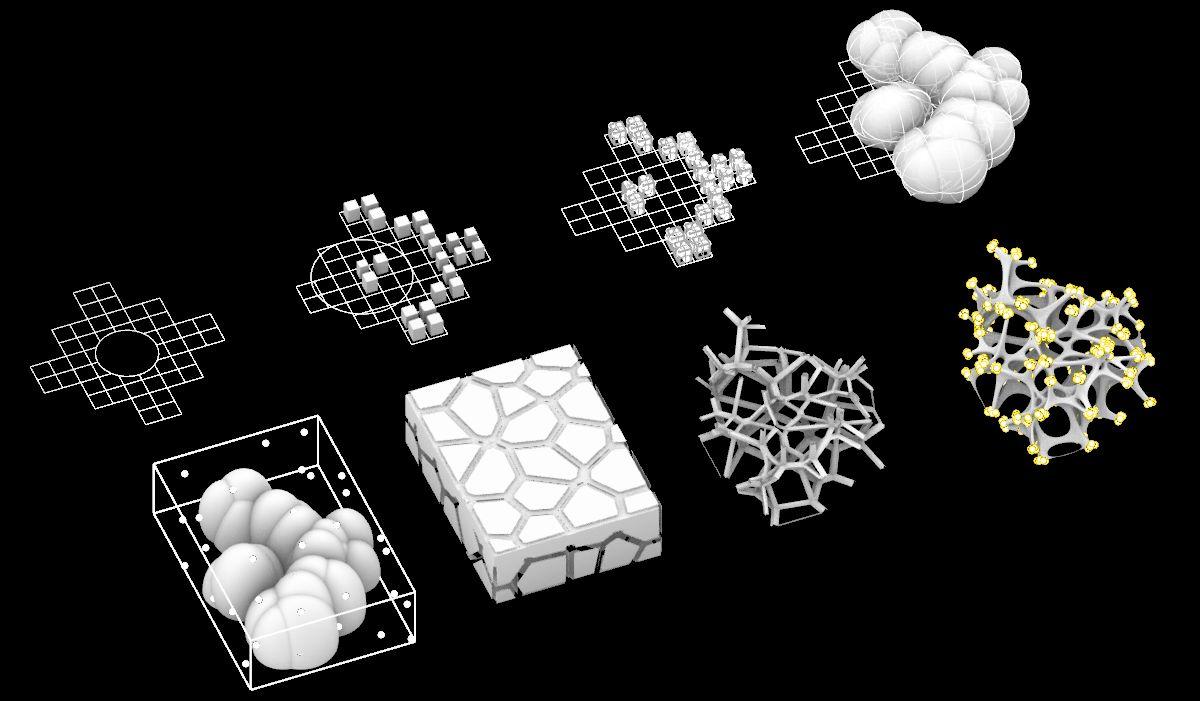
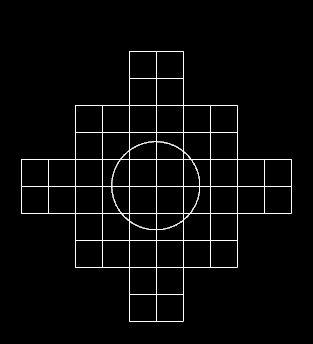
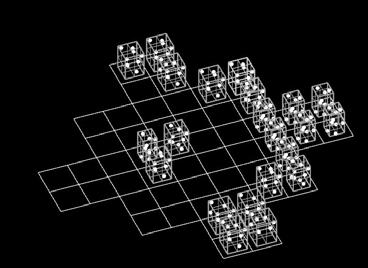

EARLY EXPLORATIONS Minimal Surfaces EXPLORATION I EXPLORATION II Relaxation Relaxation Minimal surfaces through the formation of anchor points The explorations also give insight to how material perform the structure FORM FINDING WORKFLOW- Inspired from The THE CHAKANA Mesh Boxes & circular attractor Relaxation Populate Spheres & Behavior Meshing & Trimming breps Scaling & Connecting points Populating & Voronoi The faces are forming tube-like shapes. The meshes created by joining all connected points together . Through Kangaroo plugin, the tension between the different surfaces varies.
PAVILION
SALT
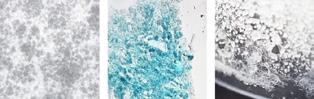
MATERIAL - CRYSTALLIZATION OF SALT
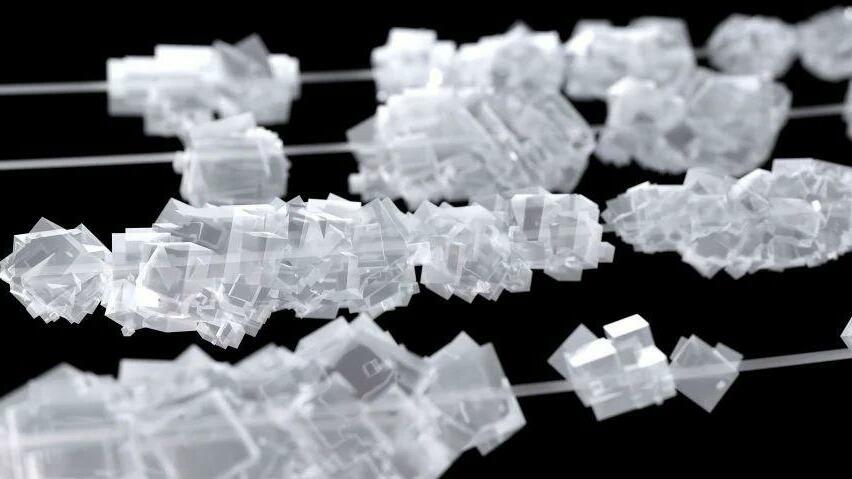

Experiment: testing experiment for crystallization of salt on a rope in a saturated salt solution with/without methanol
EXPERIMENT 01
DAY 1
0 hours. Kite rope is suspended in a vase containing a mix of super saturated NaCl solution and Methanol
EXPERIMENT 02
DAY 1
0 hours. Netted bag is suspended in a vase containing a mix of super saturated NaCl solution and Methanol


DAY 2 12 hours. Rate of crystallization is greatest in the first 12 hours of the experiment.
40 hours. Salt crystals continue to form at a slower rate.
DAY 2 24 hours. Rate of crystallization is greatest in the first hours of the experiment.

OPTIMISATION
PARAMETERS
Location of Courtyard Number of Interior spaces Size of Courtyard
DAY 3 Resulting crystals


 Atelier Luma has designed a software to visualise the salt crystallisation process
Atelier Luma has designed a software to visualise the salt crystallisation process
SALT PAVILION

SALT PAVILION
NORTH FACADE

OPTIMISED ITERATION
ESPEJO
08 Date: 2021
Location: Salar de Uyuni, Bolivia
Collaborators: Abed Badran, Amanda Gioia, Ara Keuroghlian, Jumana Hamdani, Rodrigo Alvarez
Instructor: Arthur Mamou-Mani
Project Type: Academic at IAAC
Tools: Rhino, Grasshopper including plugins: Karamba 3D, Wallacei, Weaverbird, Pufferfish, Crystallon, Droid, Anemone, 3D Max, Photoshop



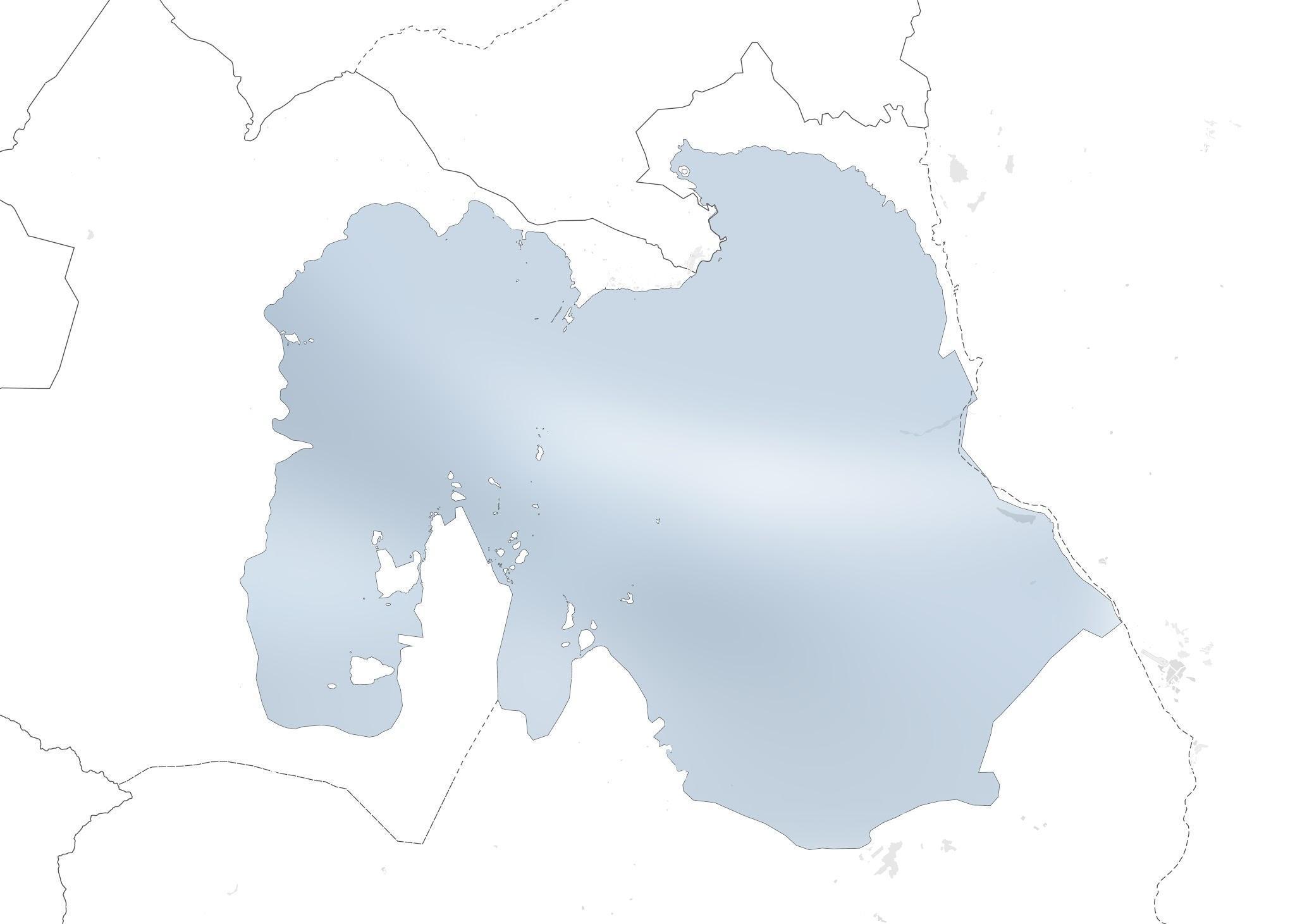
Salar de Uyuni The World's Largest Natural Mirror
ESPEJO
LAYERS OF CONTEXT POTENTIAL SITE URBAN/ CULTURAL CONTEXT CIRCULATION NETWORK WILDLIFE CONTEXT ENVIRONMENTAL ANALYSIS
Photo: Alexander Gerst
POTENTIAL SITE
The New City Location
Chacoma Bella Vista
CHIL E
Salar de Coipasa Salar de Empexa 0 50 km N
Hizo Tres Cruces Salinas de Garci-Mendoz a
Lavaxa
POTOSI
Tonavi Canquella
Caquena Cha’llacolla
Tahua BOLIVI A
Irpa Isla Pescado r Isla Incahuas i
Biodivers ity
Rio Mulatos Toja
Llica Colchani
Biodivers ity Potential Site
El Desierto Colcha K (Villa Martin)
San Pedro de Quemez
Coquesa
90km 66 km Uyuni Atulcha Chuvi ca
Salar de Uyuni Isla Casara de Huevo
Lithium Reserves
To San Juan (20km), Chiguana (40km), Laguna Colorada (175km)
Culture & Recreatio n
To Potosi (210km)
To Tupiza (225km), Villazon (320km)
To Avaroa (120km), Calma (245km)
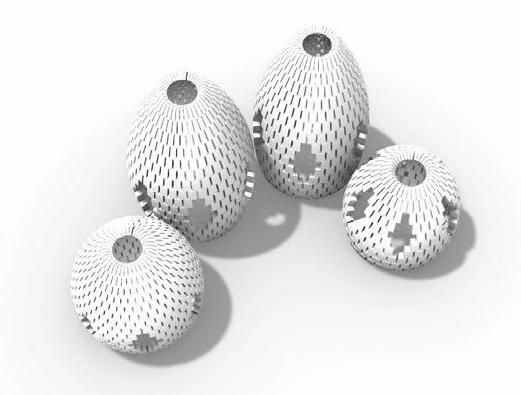
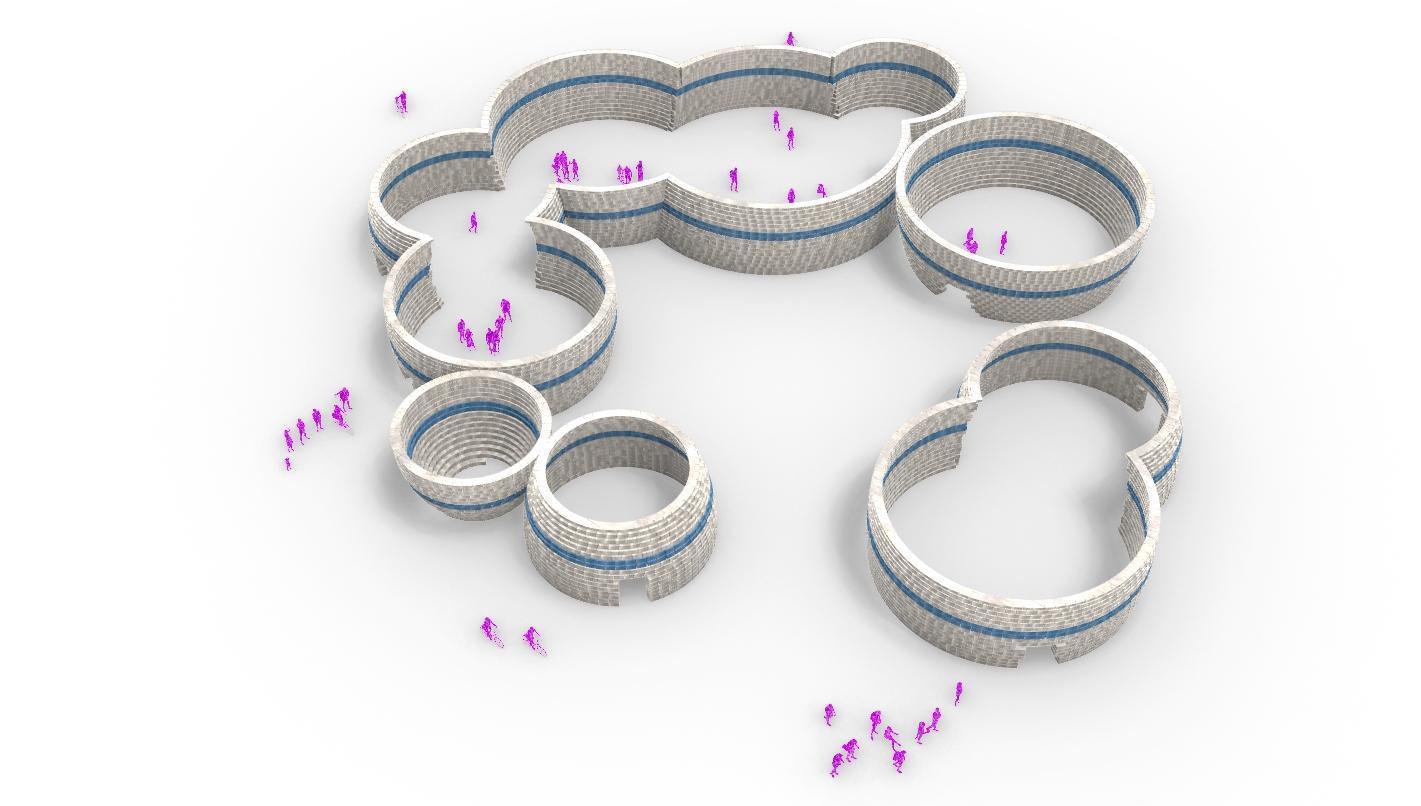
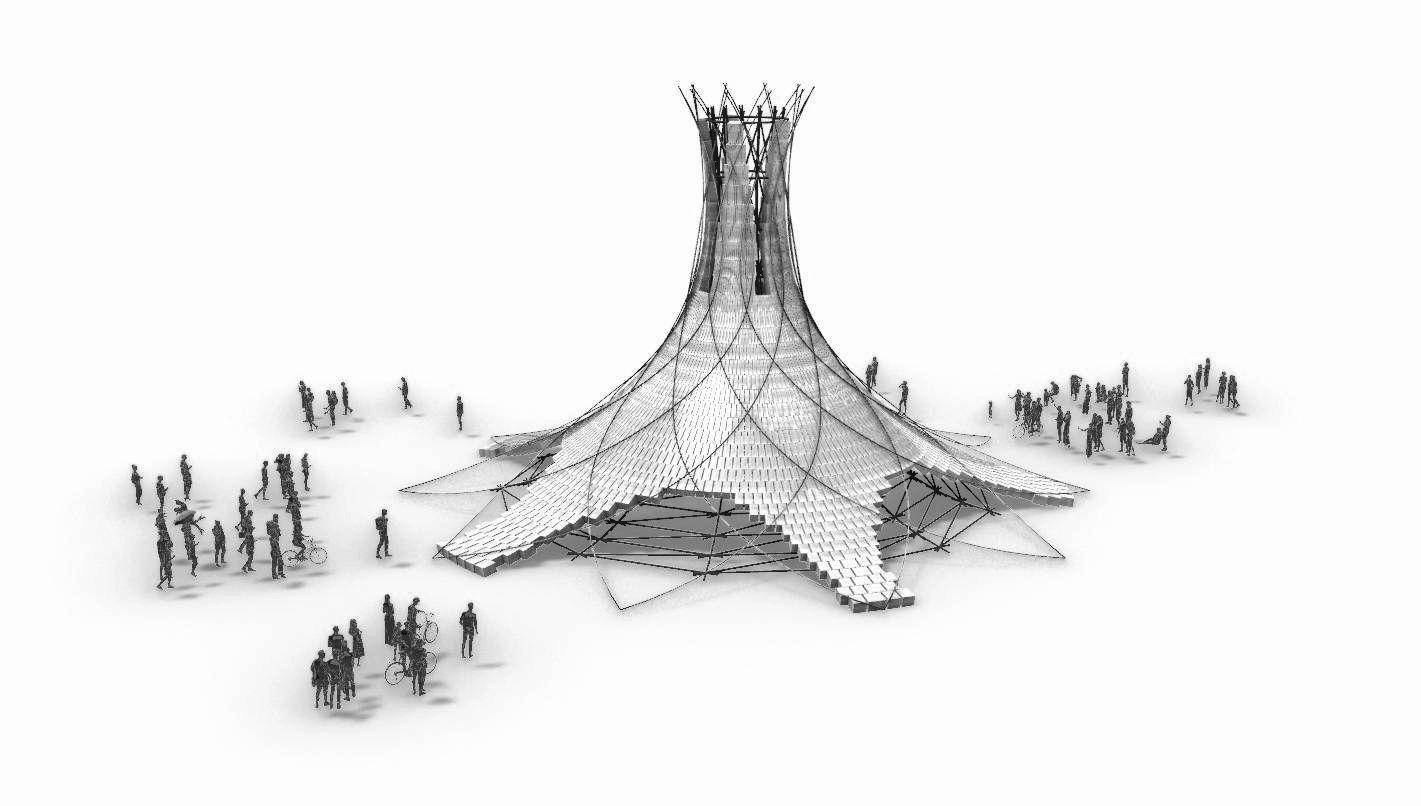
The purpose of the ESPEJO project is to define a cultural event held annually in Uyuni, Bolivia that focuses on bringing awareness to the mining in Salar de Uyuni, and a transformative change through art, culture and both local and global community participation.

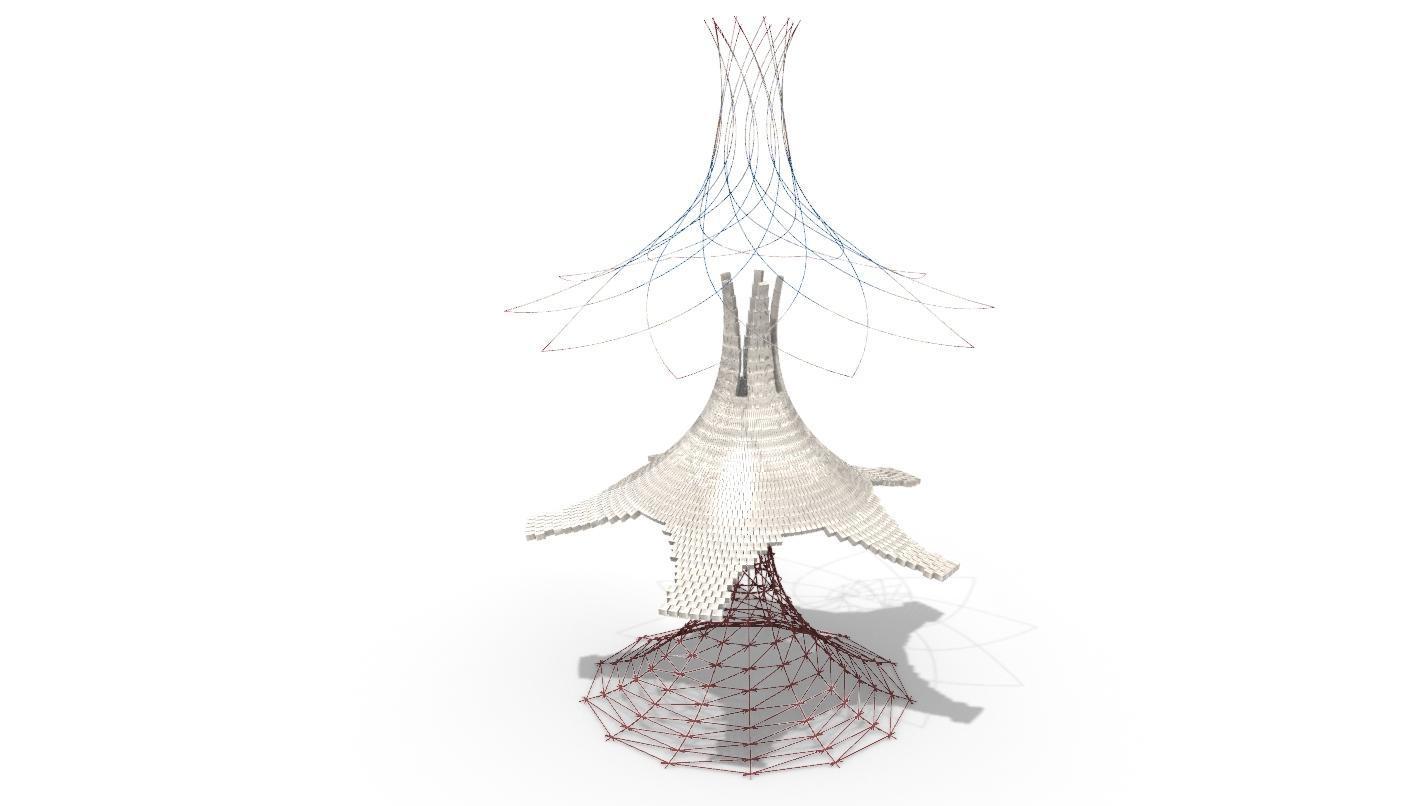
ESPEJO EARLY EXPLORATION Central Structure Material - Crystallization Of Salt Bridge structure Base of envelope Principal structure Panels area (Salt) Exterior envelope support
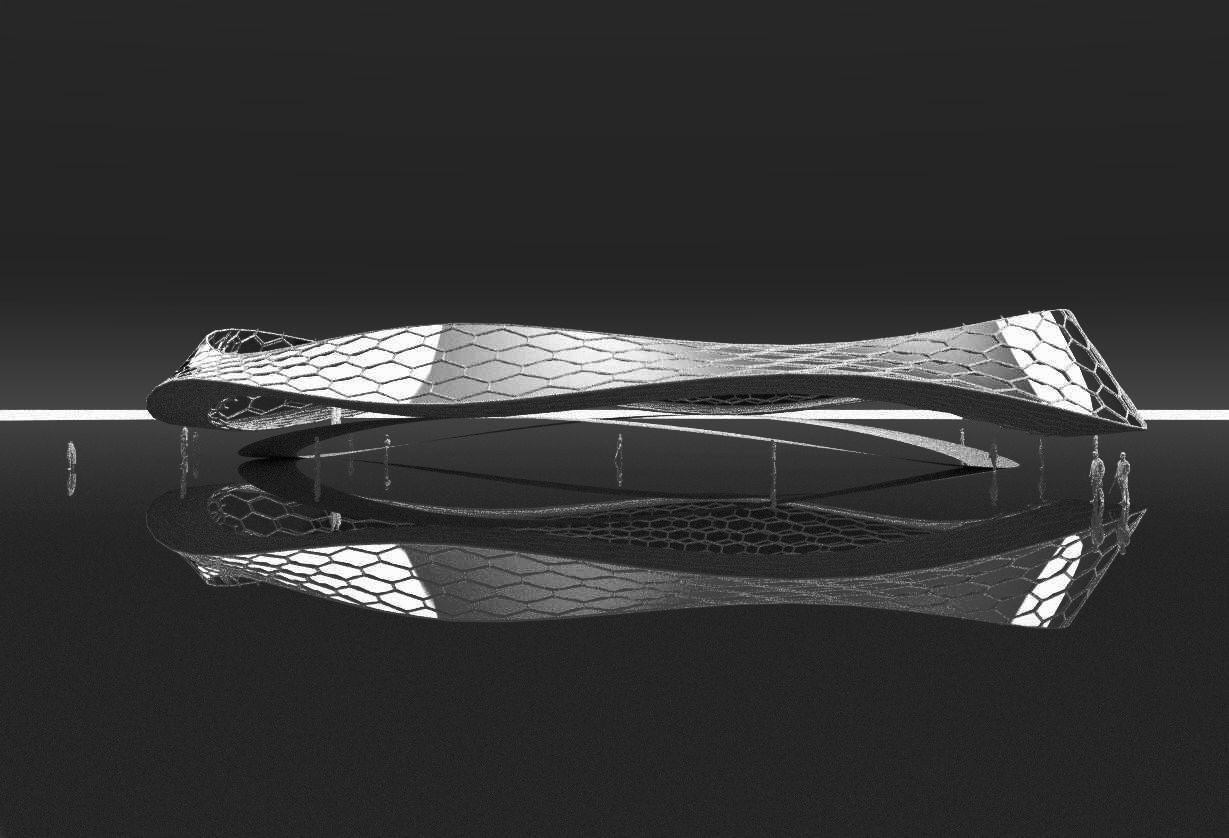
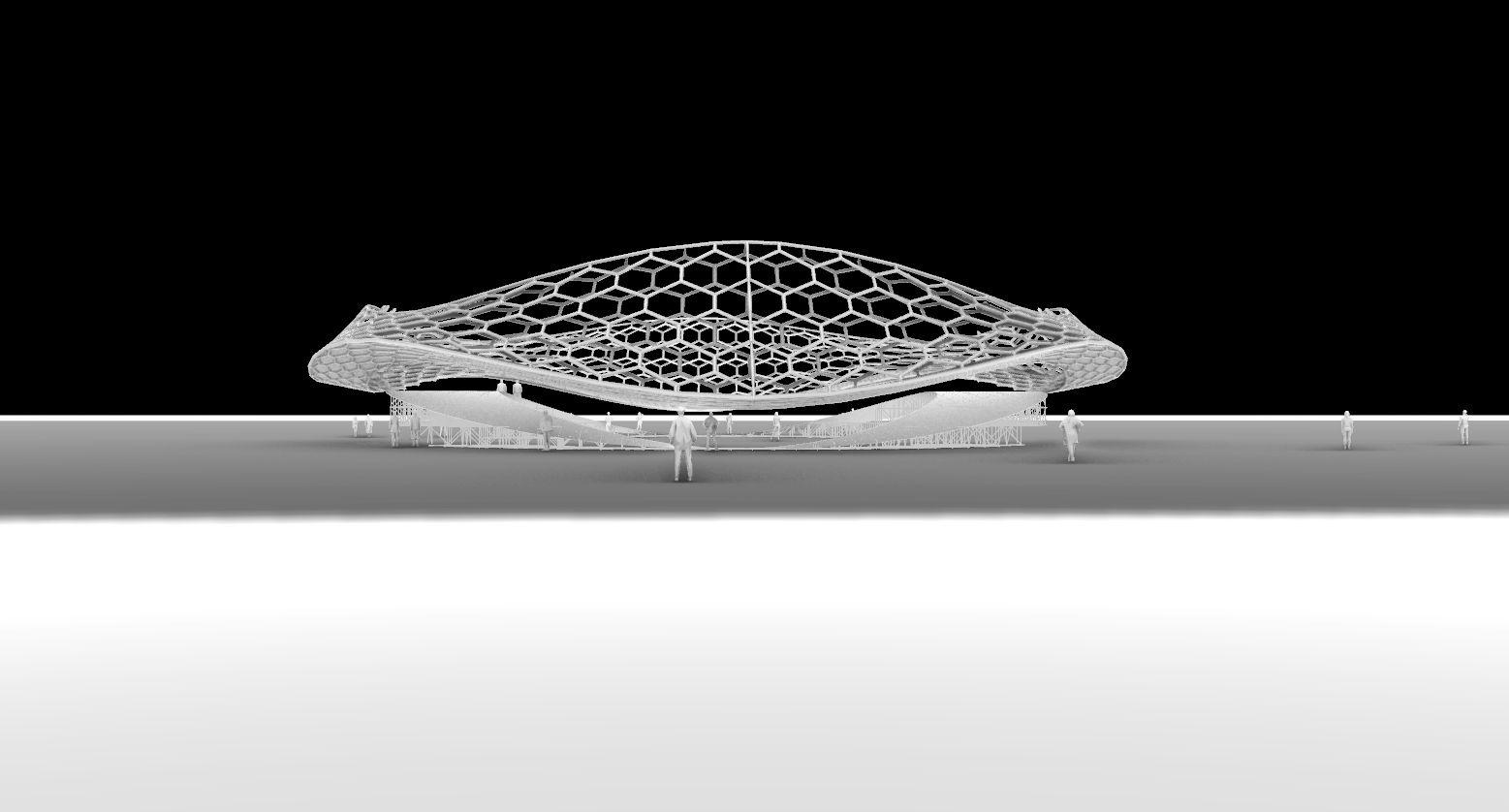






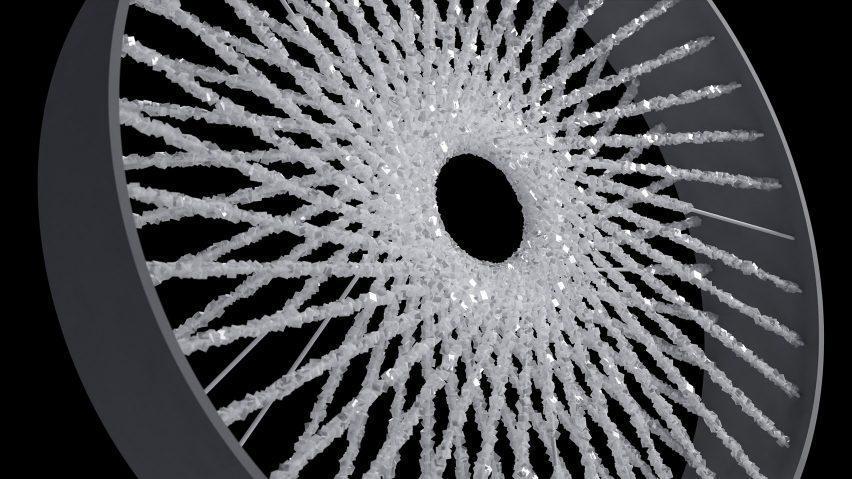
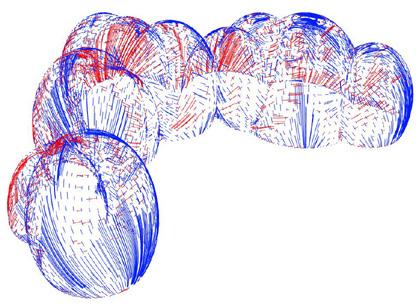
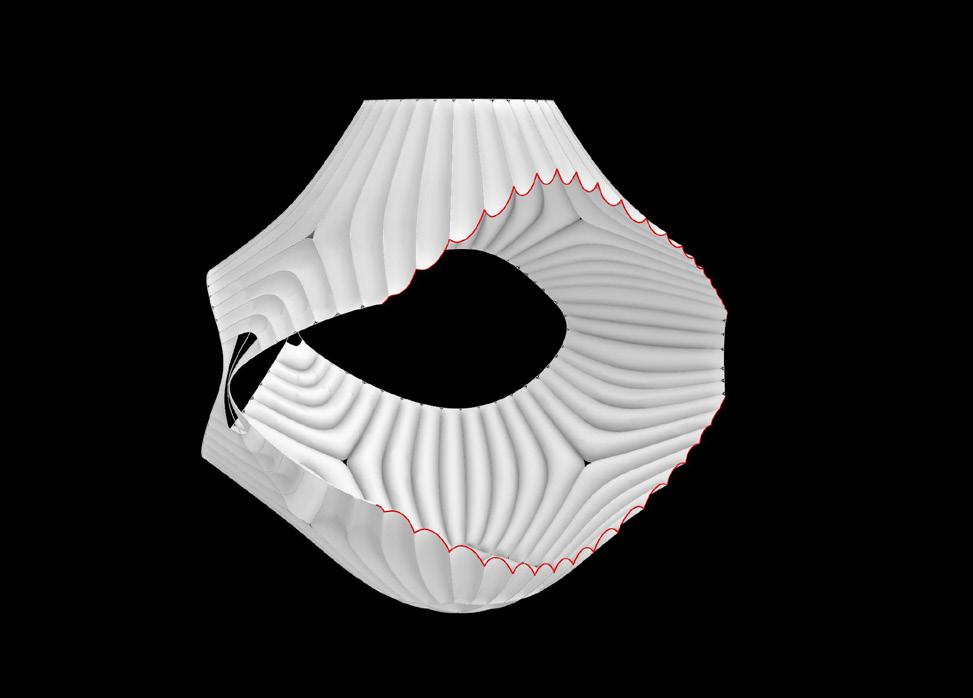
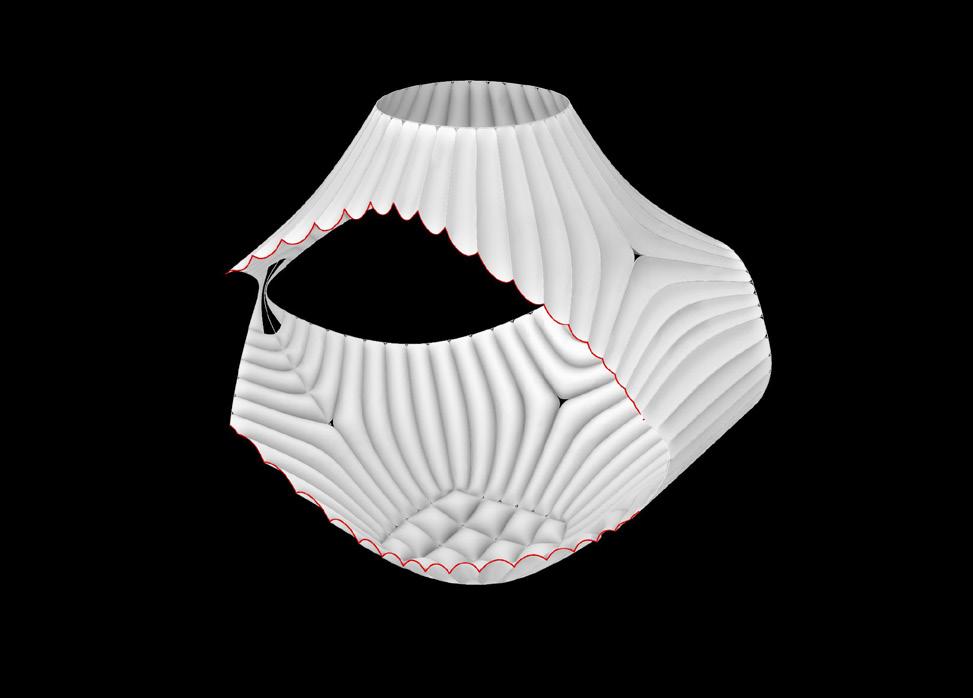
THE THIRD EYE_BRIDGE WORKFLOW Oval latticed mesh & growth generated surfaces Grasshopper Native: -Create an Ellipse Curve -Divide Curve -Create a Set of Points on Curve -Create Interpolate Curve through points Pufferfish: - Offset Curved Surfaces & Create a Solid Surface Crystallon + Native GH: -Voxelize Geometry -Fill Voxels w/ Lattice Unit Cells -Trim & Apply Thickness to Lattice Curve -Create a Pipe Surface Grasshopper Native -Offset & Divide Curve -Create a Range of #’s w/ Graphmapper -Remap #’s & Give Amplitude -Interpolate Curve & Offset -Create New Curved Surface WB, Droid, Pufferfish, Anemone, Human & Native GH Lateral view Front view






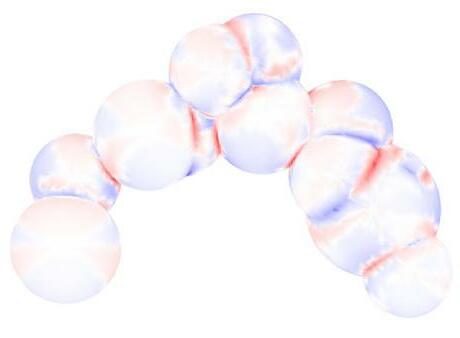
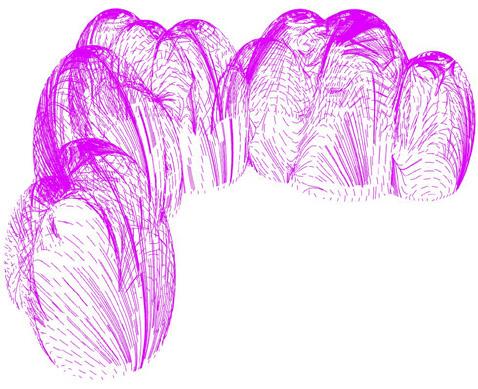
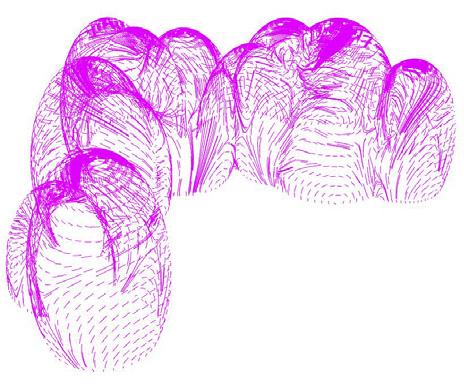
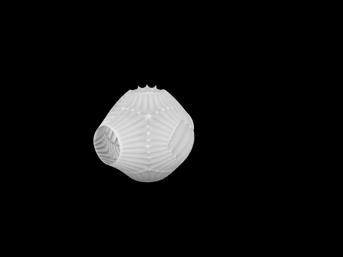
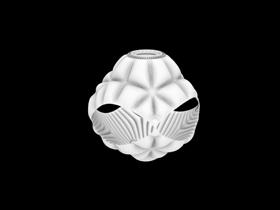
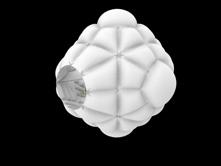
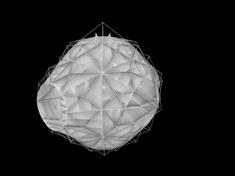
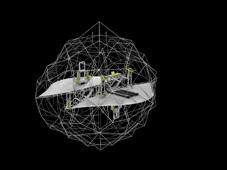
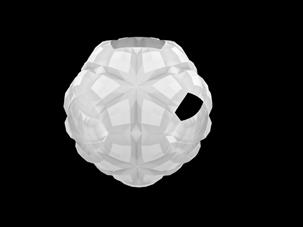
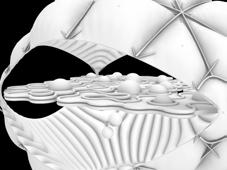
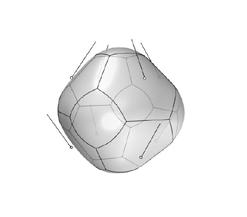
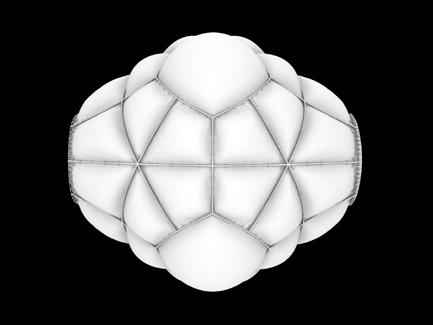
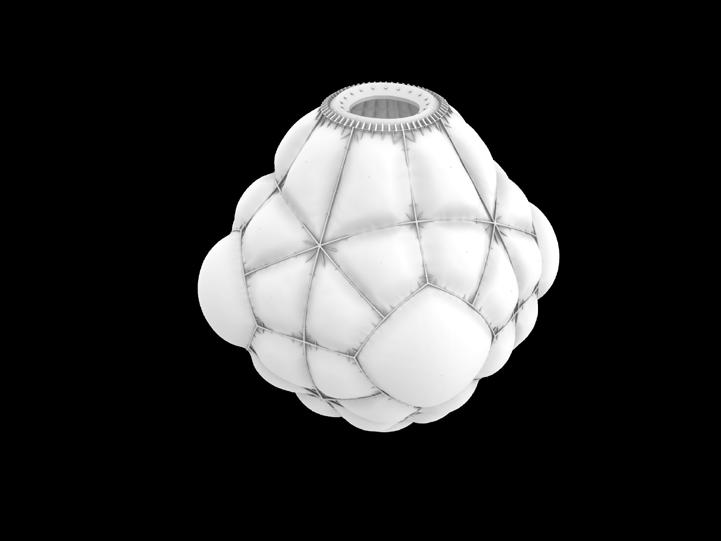
Grasshopper Native: -Construct points X = r*cos(theta)/sqrt(1+cos(phi)²) Y = r*sin(theta)/sqrt(1+cos(phi)²) Z = r*cos(phi)/sqrt(1+cos(phi)²) theta = -2 pi to 2pi phi = -10 pi to 10 pi r = 5 to 10 -Interpolate curves Grasshopper Native: -Loft Curves -Mesh from SubD Grasshopper Native: -Triangulate Mesh Grasshopper Native: -Face Boundaries -Scale and Loft Triangles Weaverbird: -Thicken Mesh -Catmull-Clark Subdivision SPHERE PAVILION WORKFLOW Curves generated on the surface of a sphere Panels ESPEJO
Exploring Brick Patterns Salt Blocks
EARLY EXPLORATION
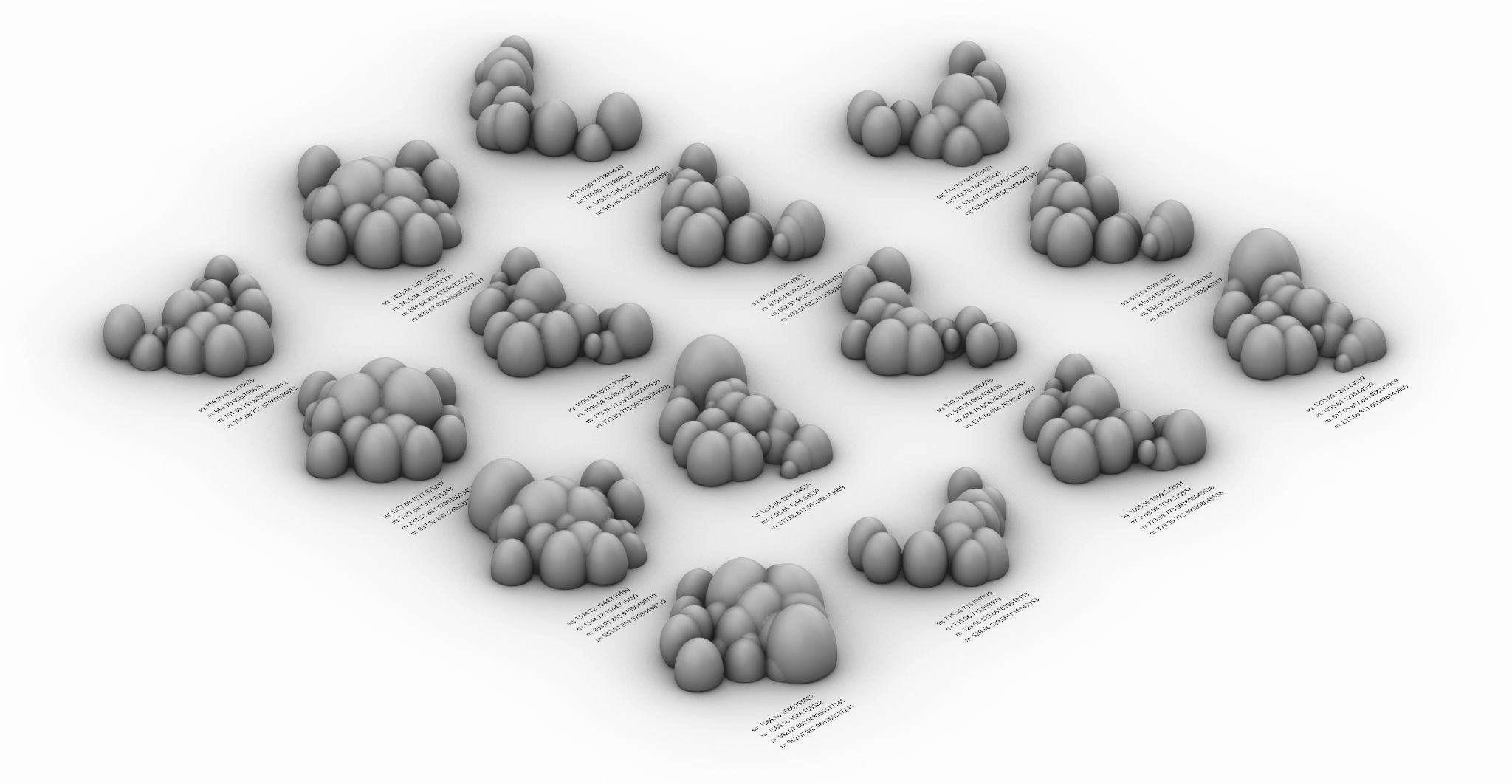
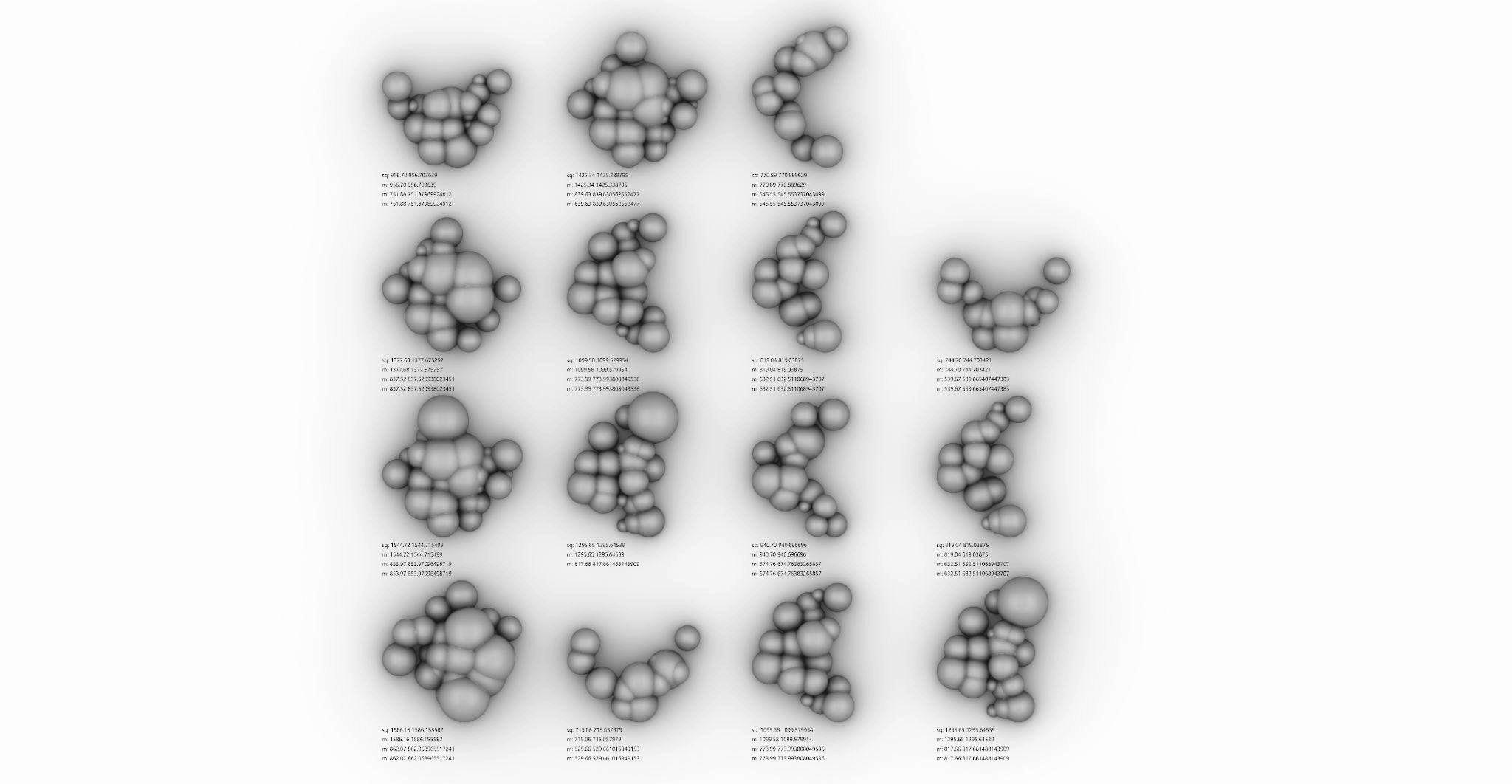

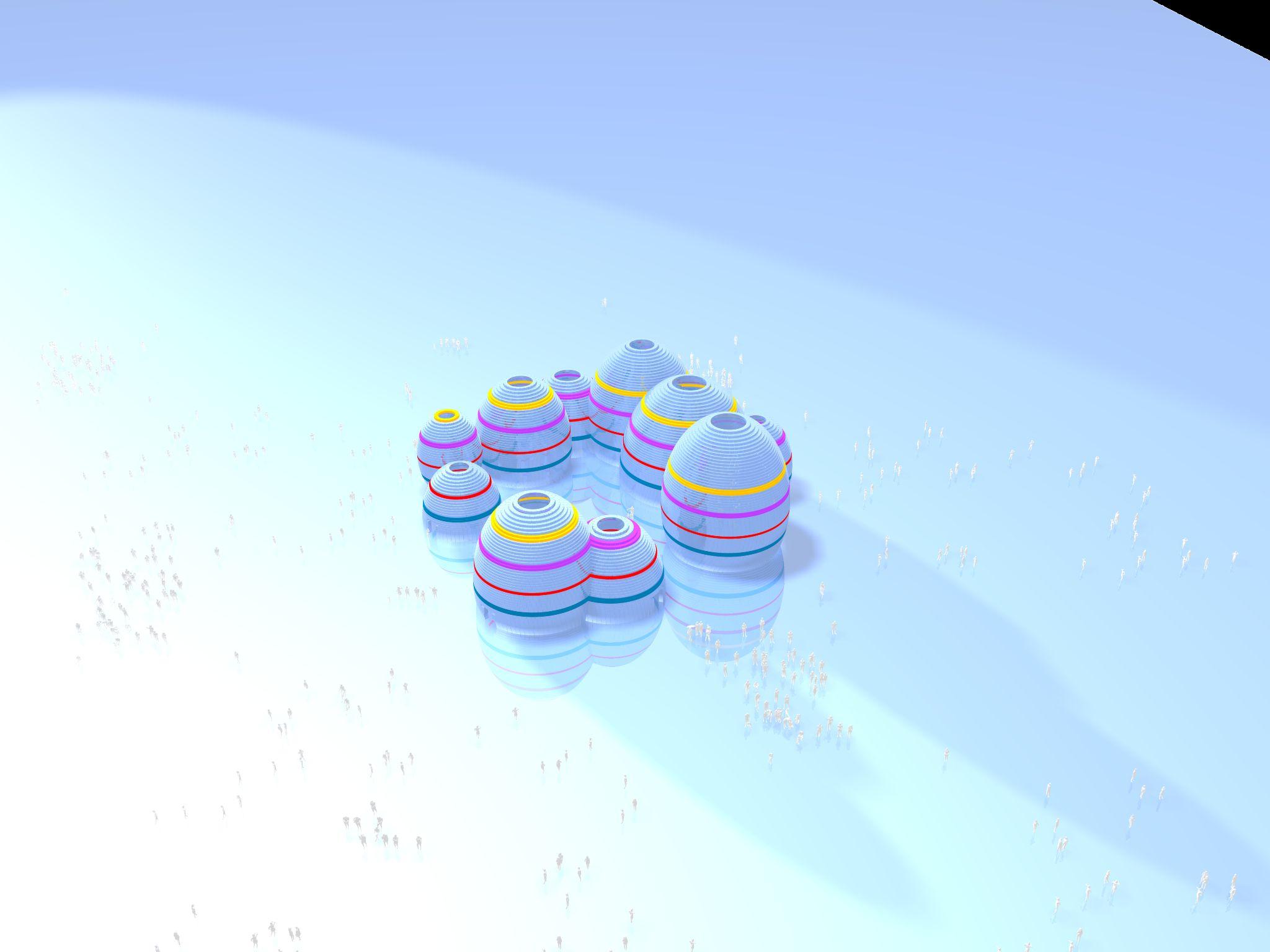
Genes: ● Location of open space ● Height differentiation ● Quantity of spheres Objectives: ● Minimise overlap of domes ● Minimise area ESPEJO Using WALLACEI Exploring 3D printing spheric form OPTIMISATION
Lithium Reserves
Measuring about 10km2 and situated at an altitude of 3,600 meters. The crust is several meters thick and lies over a salty lake.
Beneath the salt lies the world’s greatest Lithium reserves.
Photo: ESA










SOLIDIFICATION OF SALT TECHNIQUES Panels Salt + Cactus + Gelatine Baked Time 12-24 hours in the sun, Salt panels fit in an aluminum framework THE
BUILDING WITH SALT
Salt
The compressive strength of salt has around the same strength as other vernacular building materials such as ice, rammed earth and masonry structures. Saltygloo / Emerging Objects 3D PRINTING SALT / Studio Karlijn Sibbel 4D printing natural crystallization of salt. Define a structure that can evolve based on external conditions. 3D printing salt ; panels supported by a frame structure or printed with catalyst or substances. SALT CENTER/ A. DARWISH Industry by Nature / Studio Karlijn Sibbel Titled Mur de Sel, the structure is composed
of salt panels,
crystallized
the flats
Switzerland. MATERIALITY SOLIDIFICATION OF SALT ESPEJO
ATACAMA:
Wall of
By Atelier LUMA
of thousands
each one
in
and marshes of the nearby Rhone delta in France and
4D PRINTING PRESSING MANUALLY NATURAL CRYSTALLIZATION Salty glue Salt is the main local material for construction in Salar de Uyuni
Photo: living Nomads
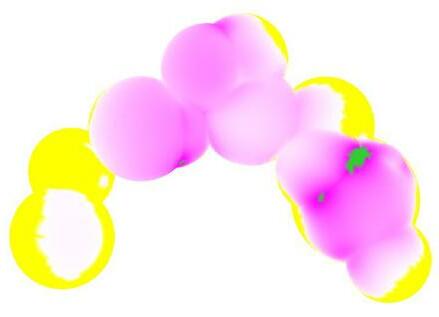
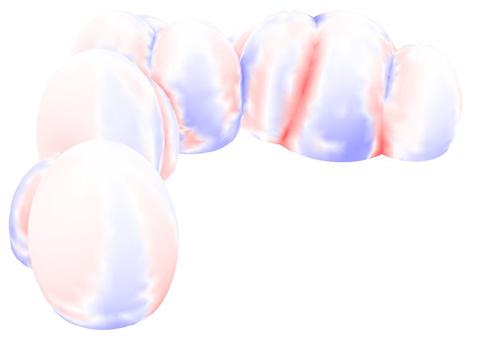
ANALYSIS & RESULTS SHELL

WIND LOAD CASE 2
WIND LOAD CASE 2
WIND LOAD CASE 1
WIND LOAD CASE 2
WIND LOAD CASE 1
WIND LOAD CASE 2
WIND LOAD CASE 1
Wind Load Utilization
If using shells, we could reduce the thickness in the areas that have the lowest utilization or create openings in these locations.
WIND LOAD CASE 2
WIND LOAD CASE 1
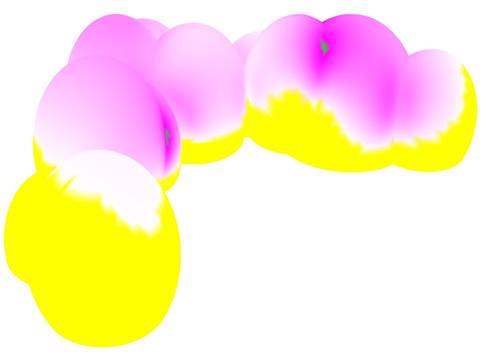
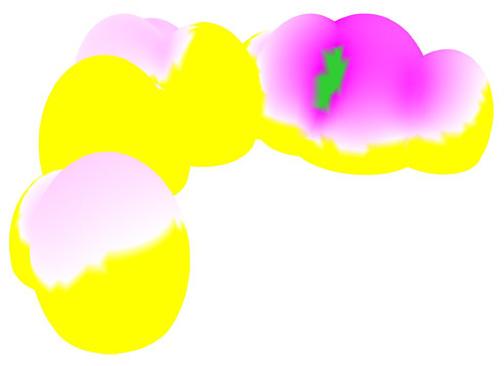
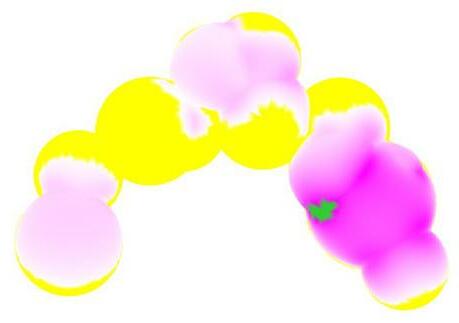
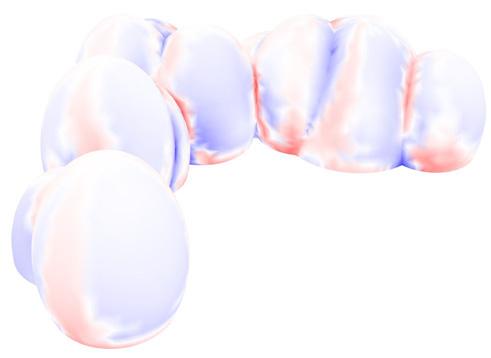
Wind Load Displacement
Darker pink represents higher displacement. The lowest displacement is in Yellow. The highest displacement is in green.
WIND LOAD CASE 2
WIND LOAD CASE 2
WIND LOAD CASE 1
WIND LOAD CASE 2
WIND LOAD CASE 1
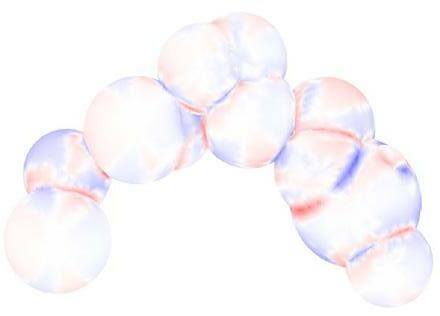
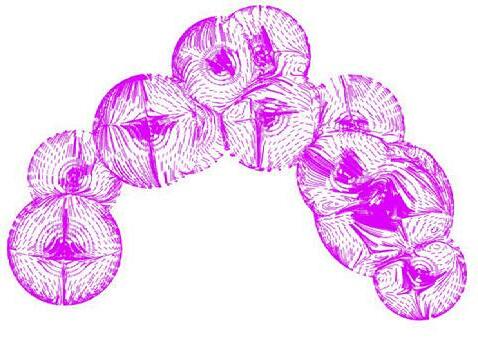
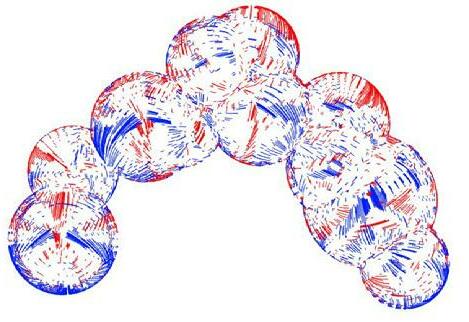
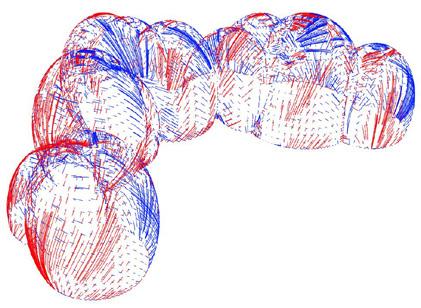
Principal stress lines
Principal stress lines are important because they distinguishes between Tension and Compression. The red lines are in Tension, the blue lines are in Compression. For the proposed grid design, only the quads that intersect Principle Stress lines are Triangulated.
WIND LOAD CASE 1 WIND LOAD CASE 1
Forceflow lines

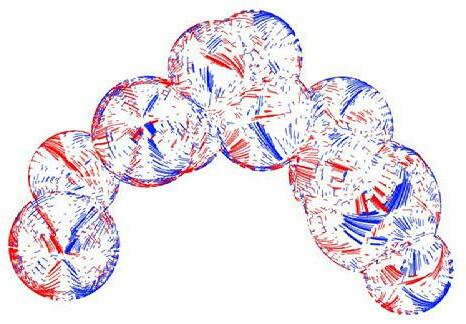
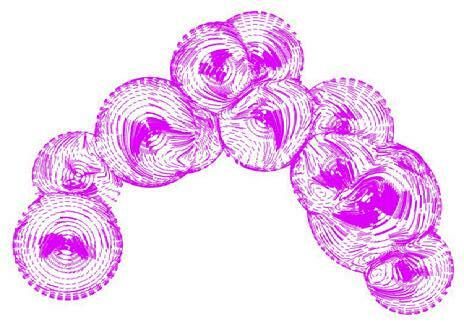
As expected, the forceflow lines would simply scale up in the Z-direction.
ESPEJO

Salt Domes

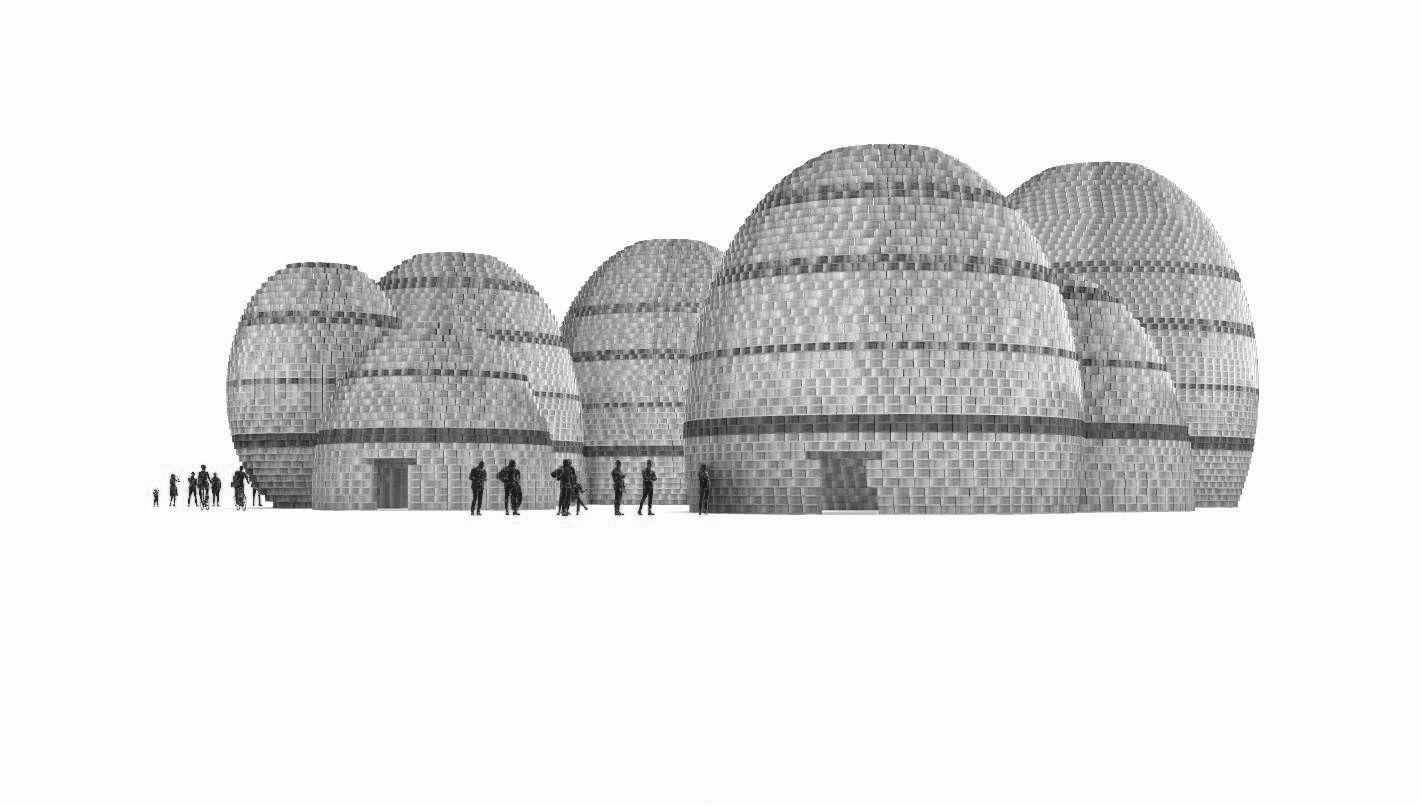
Bazars areas
The functions
The size and all the iteration can be applied for too many uses , like sell areas , art spaces , relax areas, between others.
Exposition areas
Salt Tower Cluster
LAYER OF TOWER
External structure
Woven structure where the natives will add the colors of the fabrics and wool colored.
Base Structure
The structure will be developed with wood and totora (plant near the Lake Titicaca)
Salt Bricks
The principal structure of the proposal , based in brics.
Base Structure
The structure will be developed with wood and totora (plant near the Lake Titicaca)
Colored Bricks
Pattern Variation , painted as the fabrics of the communities near the salar
Mini Domes
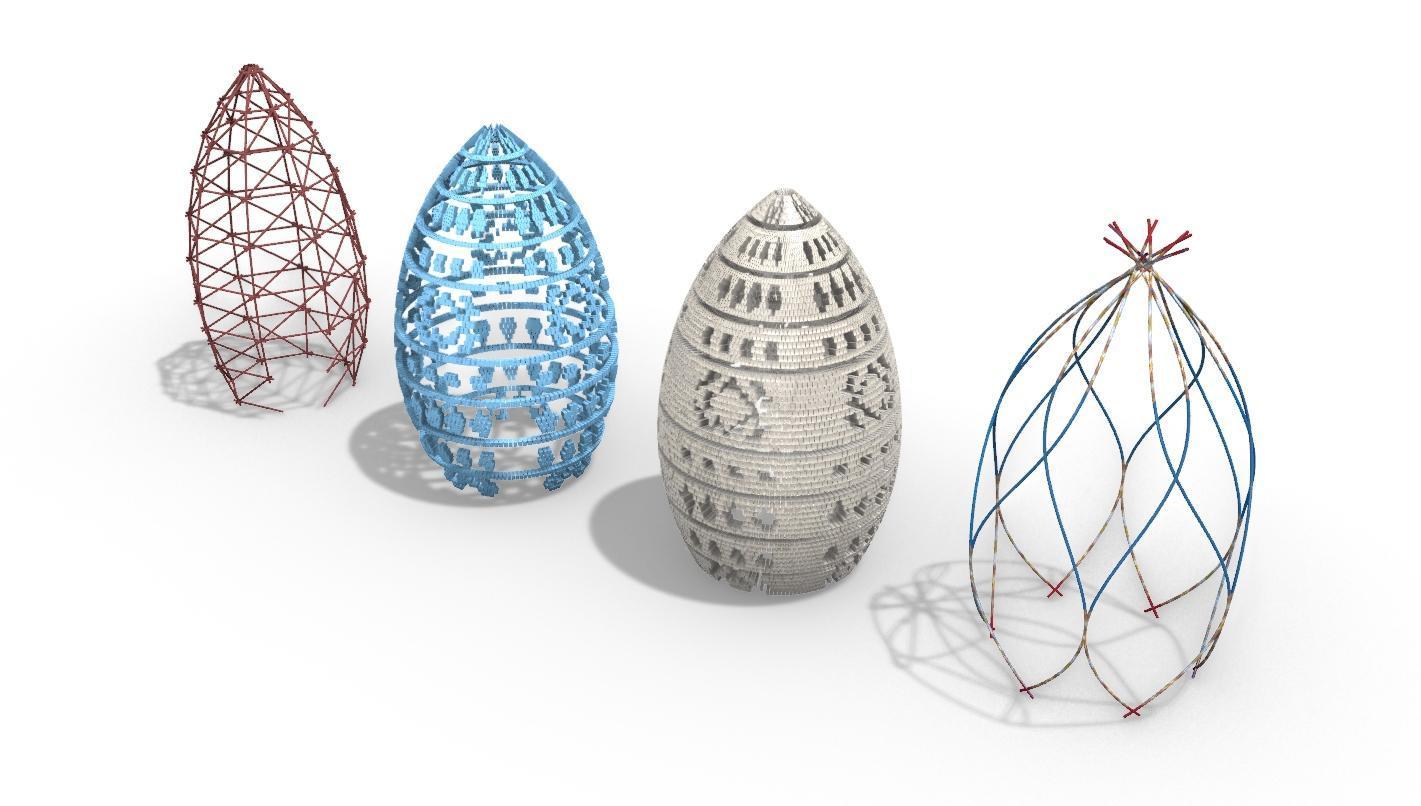
Salt Bricks
The principal structure of the proposal , based in brics.
External structure
Woven structure where the natives will add the colors of the fabrics and wool colored.
The place where the visitors can interact with the structure , inside and outside , The external structure are cover with the traditional fabricsWINGS OF CHANGE COMPETITION
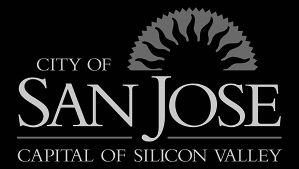
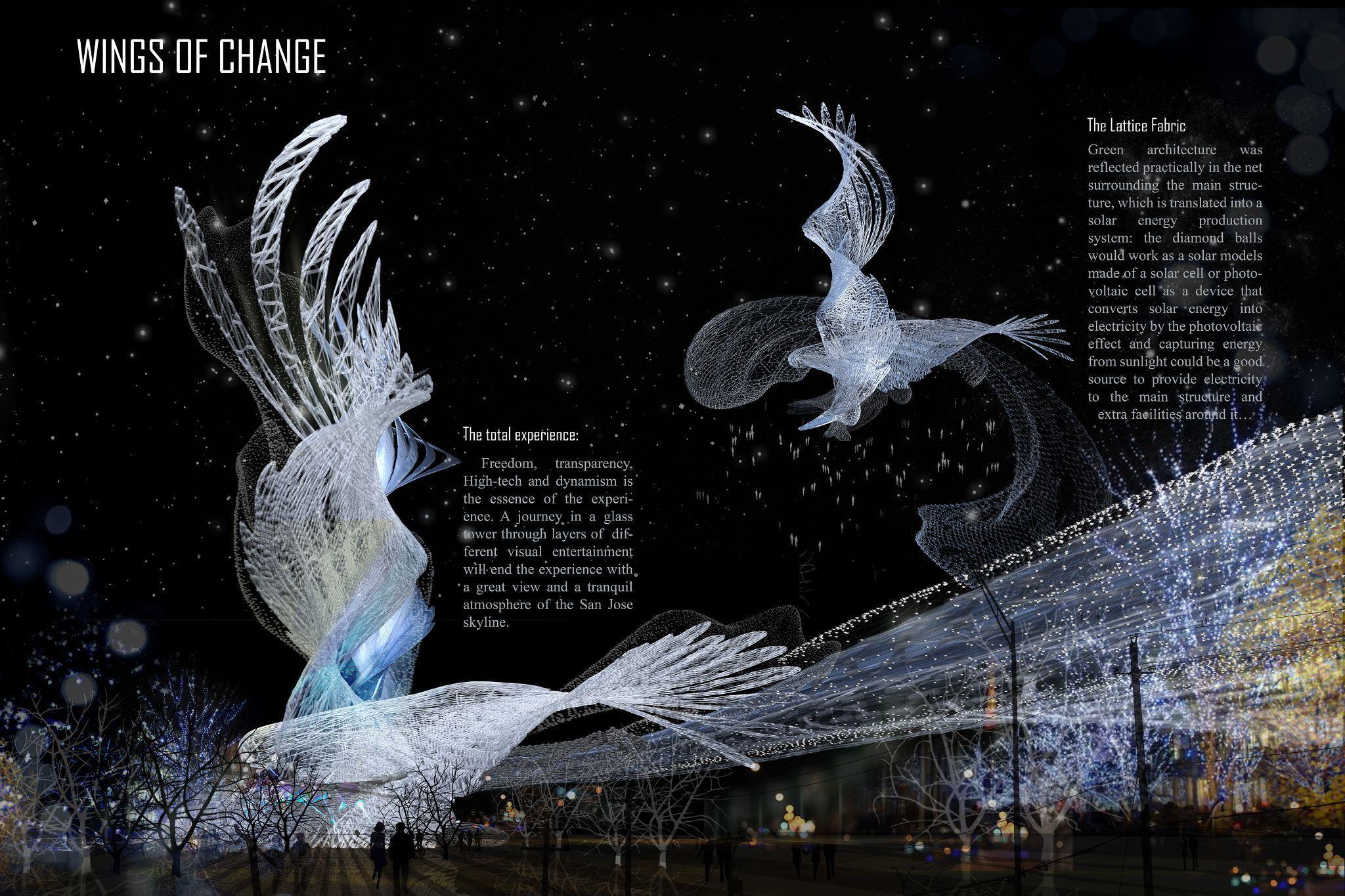
09 Date: 2020 Location: San Jose, USA Project Type: Competition Collaborators: Jumana Hamdani, Sepa Sama Tools: Rhino, Grasshopper, 3D Max, Photoshop
FUTURE CITY
Date:2000
10Location: Baghdad, Iraq
Collaborators: Jumana Hamdani
Project Type: Academic at Baghdad University
Tools: Hand drawings: Ink, Zipatone
MÖRRUM CONFERENCE CENTER
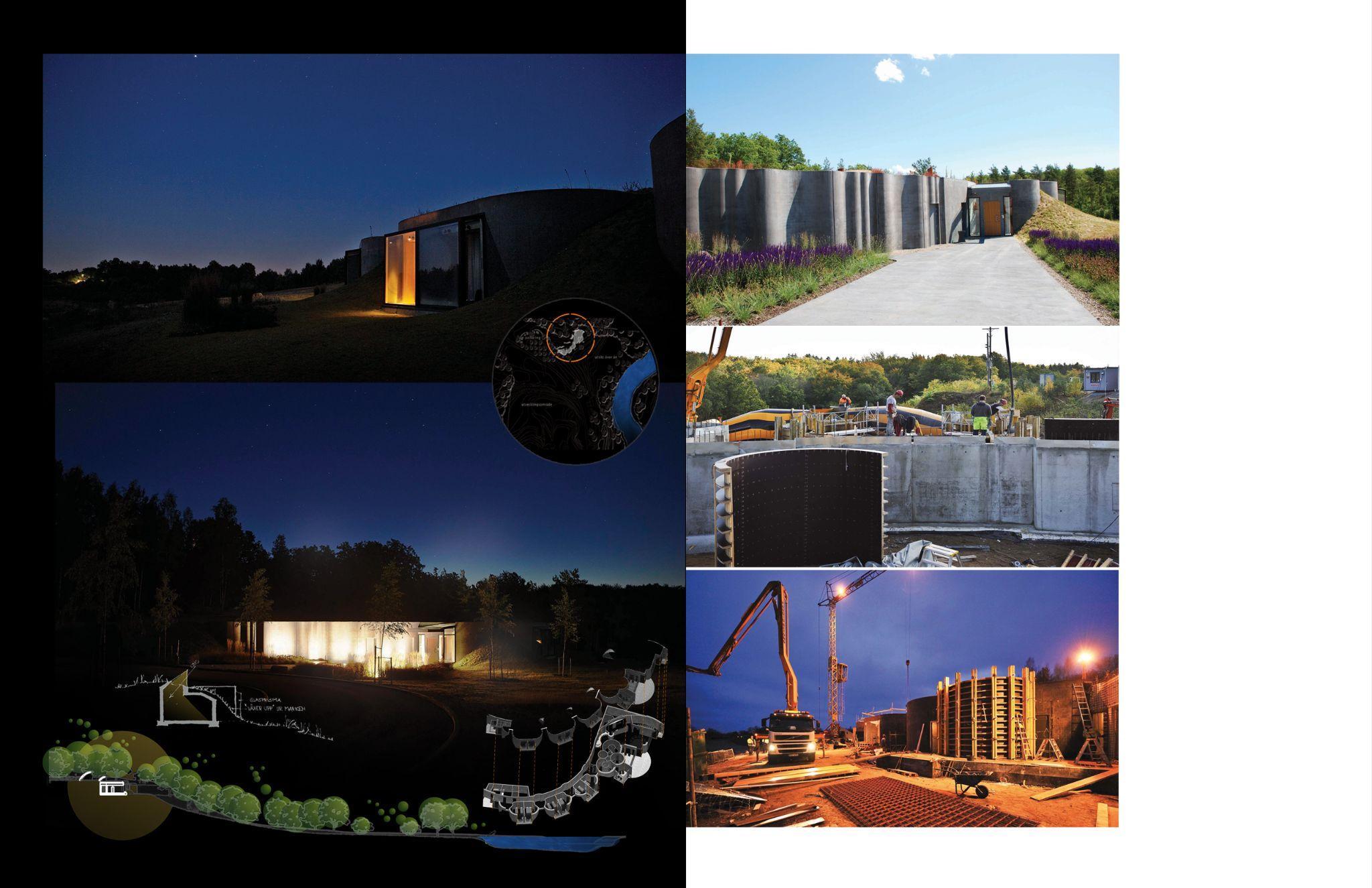
11 Date: 2008-2009 Location: Mörrum, Sweden Project Type: Built, Cultural Collaborators: at Anders Törnqvist ATA Client: Färdig Betong Built up area: 650 M2 Tools: Revit, 3D Max, Photoshop
Project description:
Components: conference room, five double rooms, sauna, bathrooms, kitchen bar, wine storage, guest room and outdoor terrace
ARAB OPEN UNIVERSITY
Date: 2006-2007
Location: Amman, Jordan
Collaborators: at CCG & Jafar Tukan
Project Type: Built, Educational
Tools: AutoCad, Revit, 3D Max, Photoshop
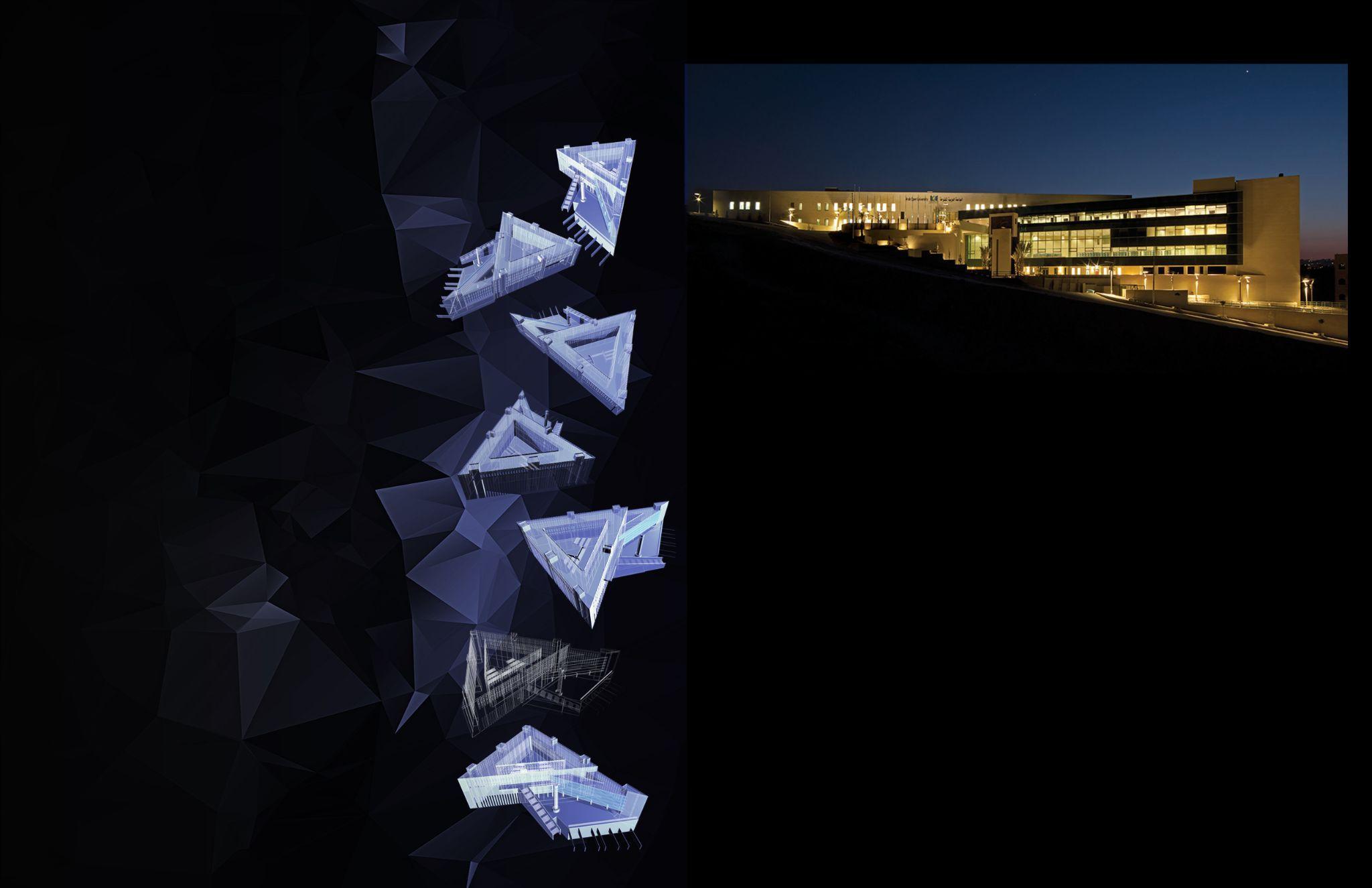
Client: Arab Open University
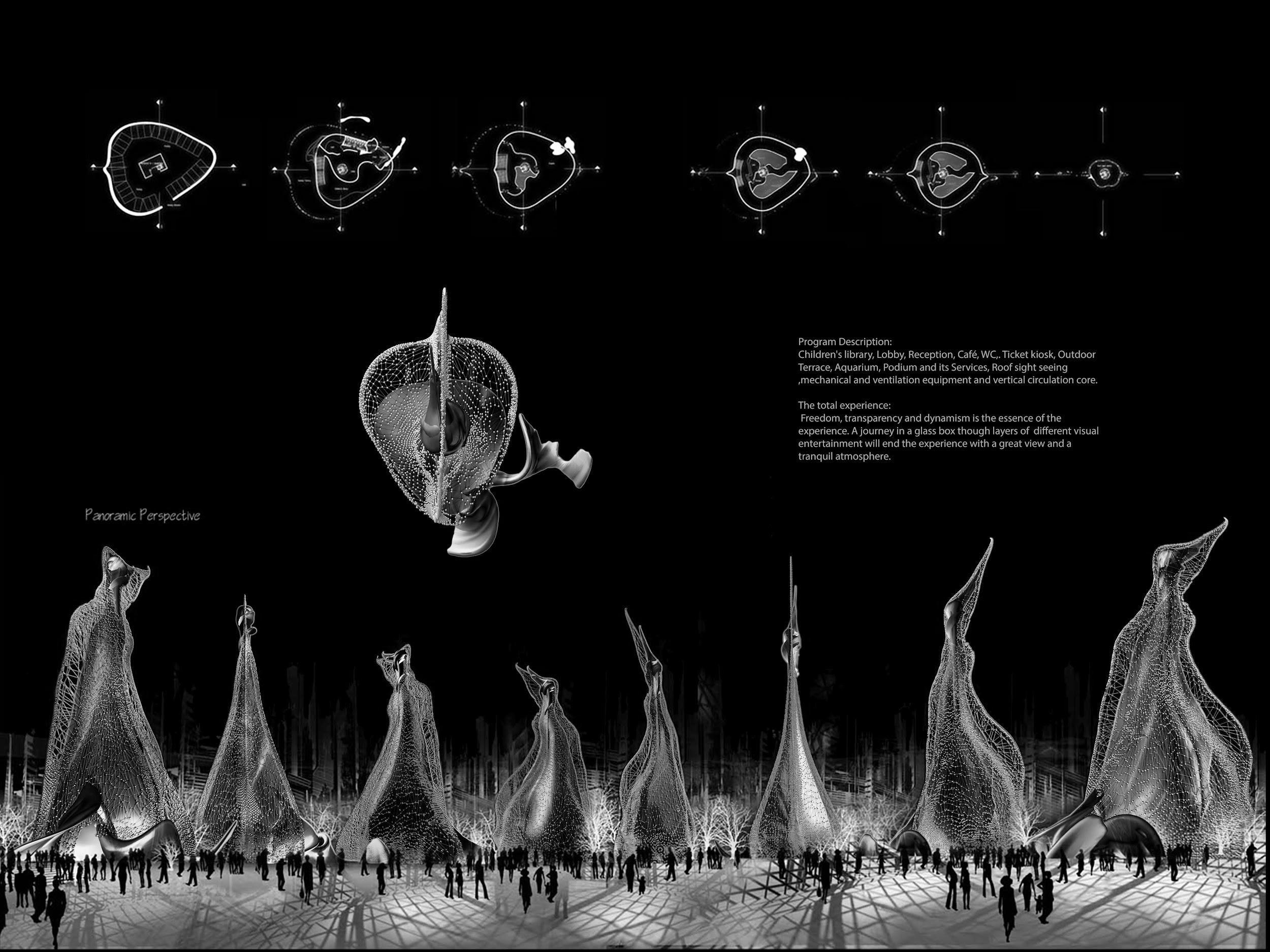
Project Description: The project consist of a permanent educational branch facility for the Arab Open University that includes the following main departments: - Senior branch management - Administrative affairs - Academic affairs - Academic programs and instructional spaces - Education and information technology - Branch support
Total built-up area of 11,000 m2
12
Landscape Design Elements
Ceremonial court: This court which is located at the east side forming the formal festival entrance of the project is designed as occasional gathering space for special events, paved with geometric Arabic decorative patterns, provided with elevated stage, and some planters.
Amphitheatre Court: Semi-formal space, planted with vertical elements (palm trees) to break down the scale of the surrounding building and to provide pleasant atmosphere for the users, this court is to be paved formally with tree pits covered by decorative metal and suitable furniture to enrich the space as functionally usable area.
Courts Connecting Stairs: The shaded stairs connecting the main outdoor spaces are designed not only as connecting stairs but as, gathering seating steps, with colorful plants to soften the atmosphere of this space.
North-west Court: This court is the main activity, gathering, circulation and recreation area of the whole project, this court is treated as informal, relaxing area, paved with durable multi texture multi color patterns, provided with outdoor cafeteria service zone, table tennis and floor chessboard, clock tower and some sculptural elements and exhibition panels. This court is proposed to be an active, interesting, yet functional oriented meeting and gathering space.
North-West Garden: This area is the beginning point of the main pedestrian stairs and ramp leading to the project through the main court. Since this is the only natural - relatively small- part of the site free of buildings; it is simply designed and naturally planted.
ITC Services: The IT services for the university were designed in order to provide full internet accessibility for video conferencing, streaming and online teaching system. Giga speed infra-structure was maintained and provided for all IP based systems e.g. Telephone, data, internet and CCTV.
The scope of work comprised main server room design, core/edge switches designs, passive components design, vertical and horizontal backbone designs. Moreover, CC provided all tendering and supervision services for all IT installations.
Services Provided Architecture Design, Engineering Design, Landscape Design, Irrigation Design, Construction documents, Supervision & ITC Services
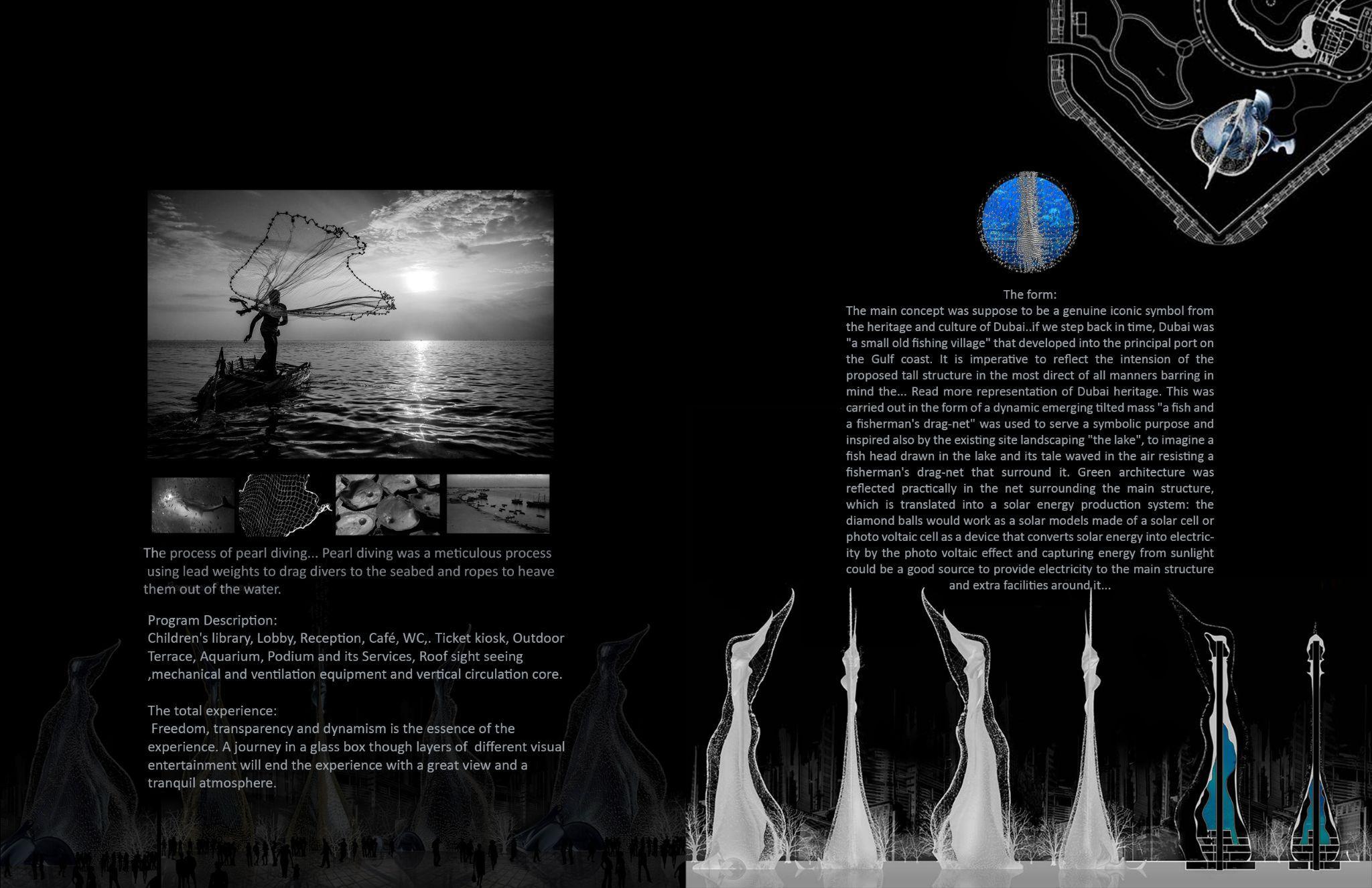
DUBAI EMBLEM STRUCTURE

13 Date: 2007 Location: Dubai, UAE Collaborators: Jumana Hamdani Project Type: Competition Clent: Dubai Municipality Tools: 3D Max, Photoshop
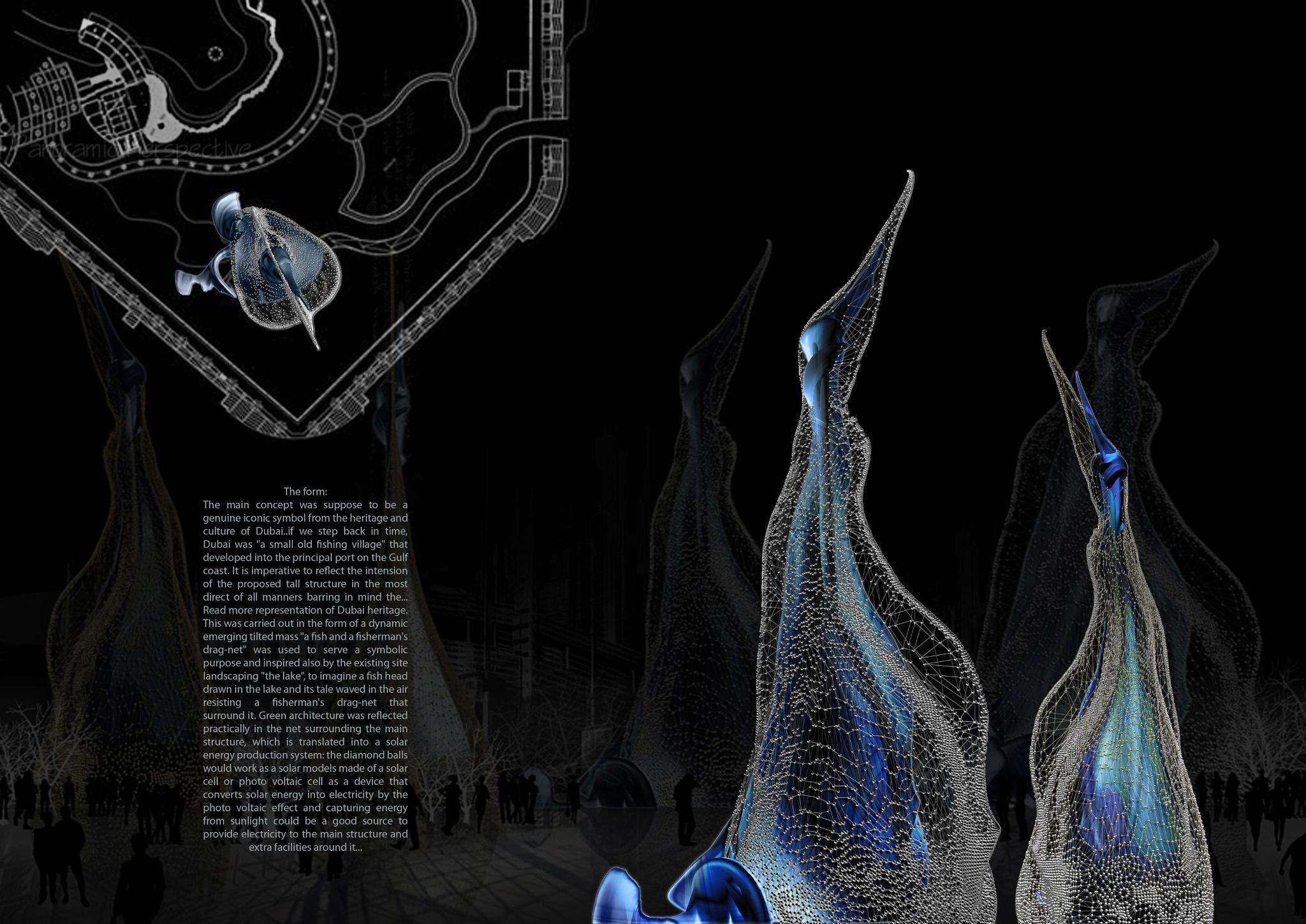
DUBAI EMBLEM STRUCTURE
Elevations
Site plan Sections
DUBAI EMBLEM STRUCTURE
Panoramic View
Top view
Plans
LONDON CLIMATE ANALYSIS
14
Date: 2021
Location: London, UK
Collaborators: Abed Badran Jumana Hamdani
Instructor: Angelos Chronis
Project Type: Academic at IAAC
Tools: Rhino, Grasshopper including plugins: Ladybug, Honeybee, Eddy 3D, InFraRed
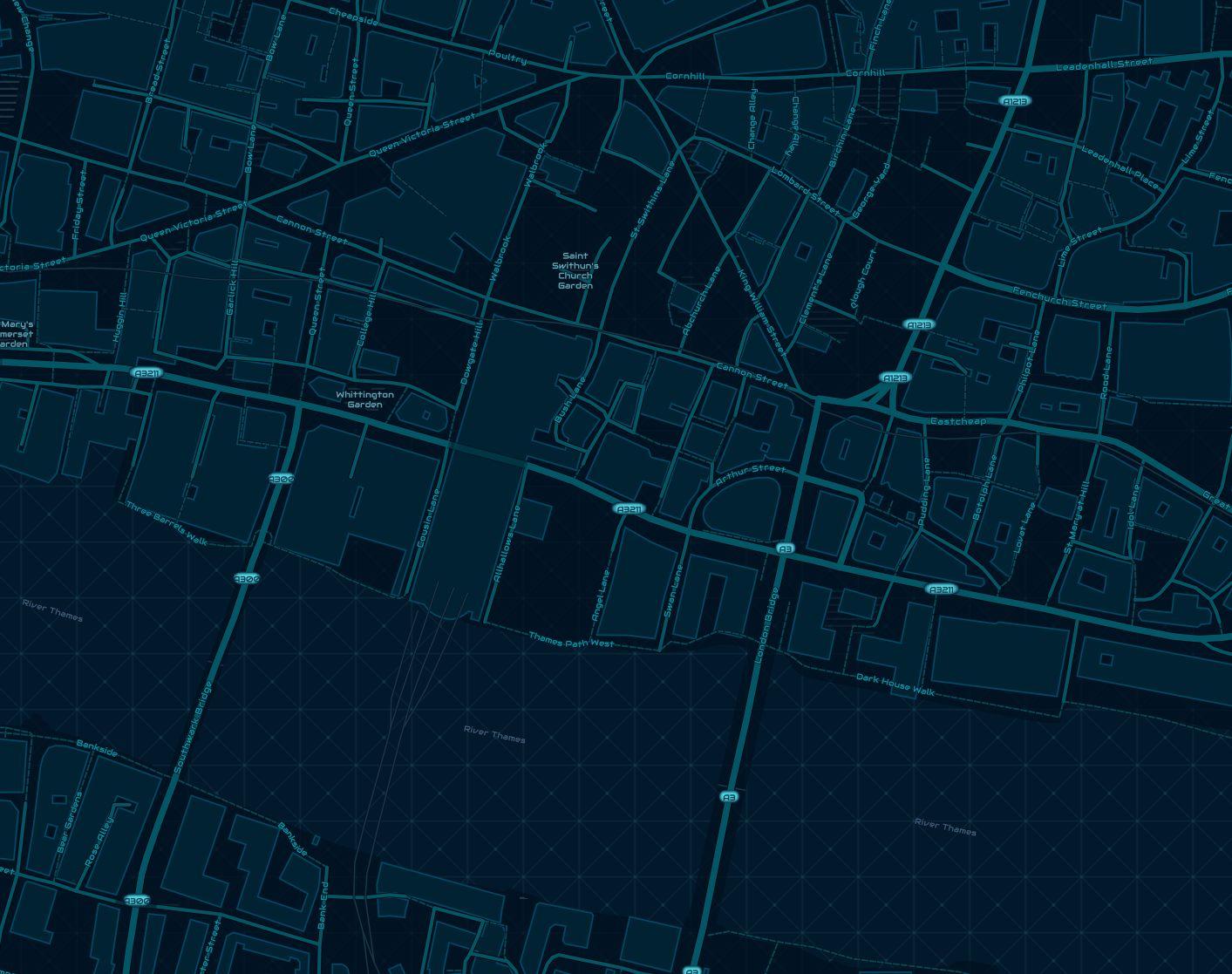
THE SITE// LONDON
The context & Street view



Square Mile-LONDON
500 X 500 meters
Our site is located in the traditional financial centre (Square Mile) of London.
The area is very common by its high density of commuting; workers and visitors at day time.
LONDON CLIMATE ANALYSIS
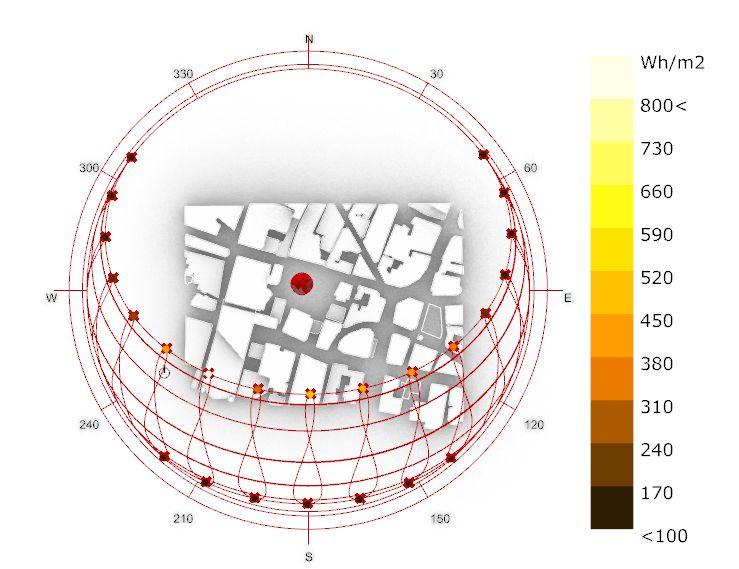
DAYLIGHT SUN PATH VISUALIZATION
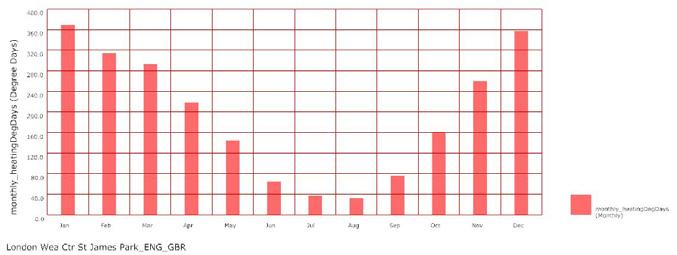
The sun path helps to understand potential heating patterns
DAYLIGHT
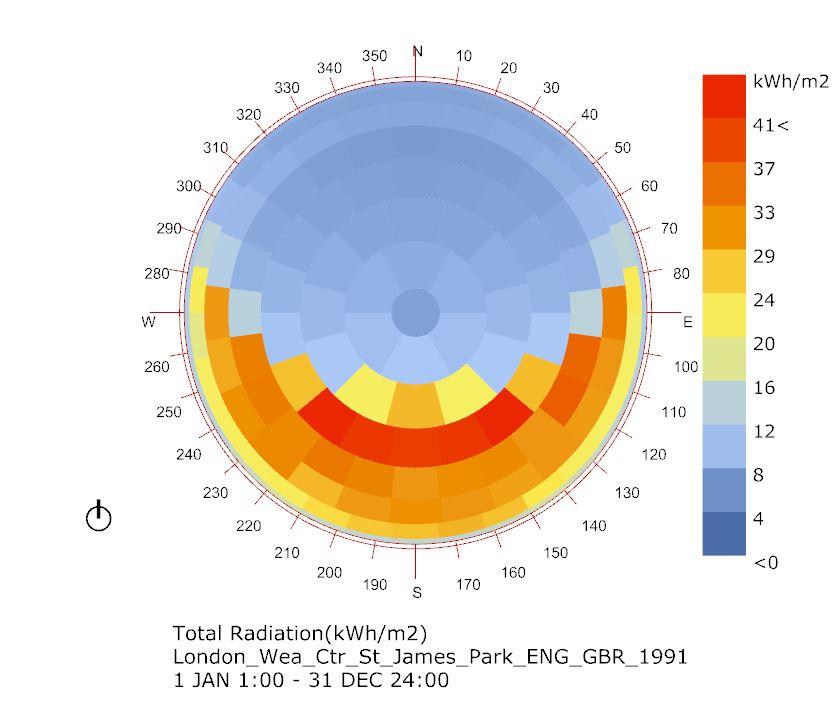
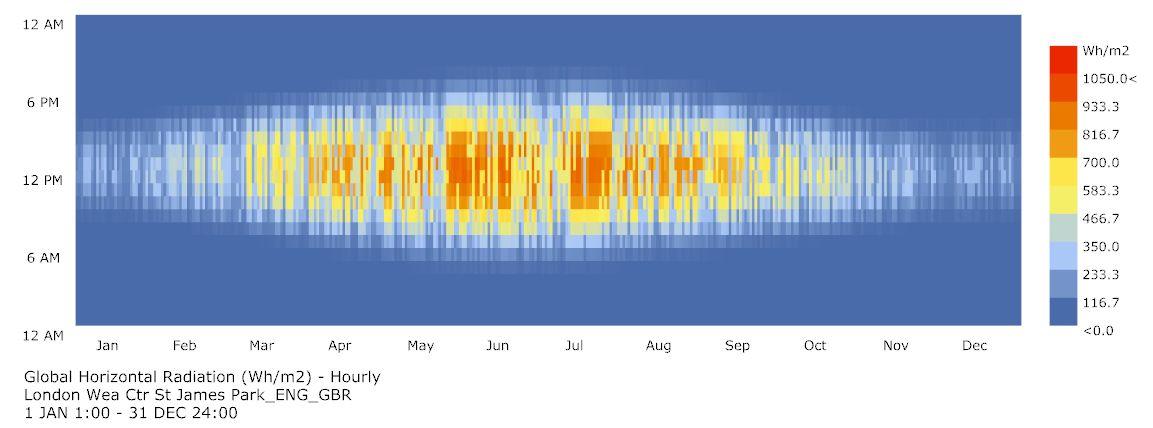
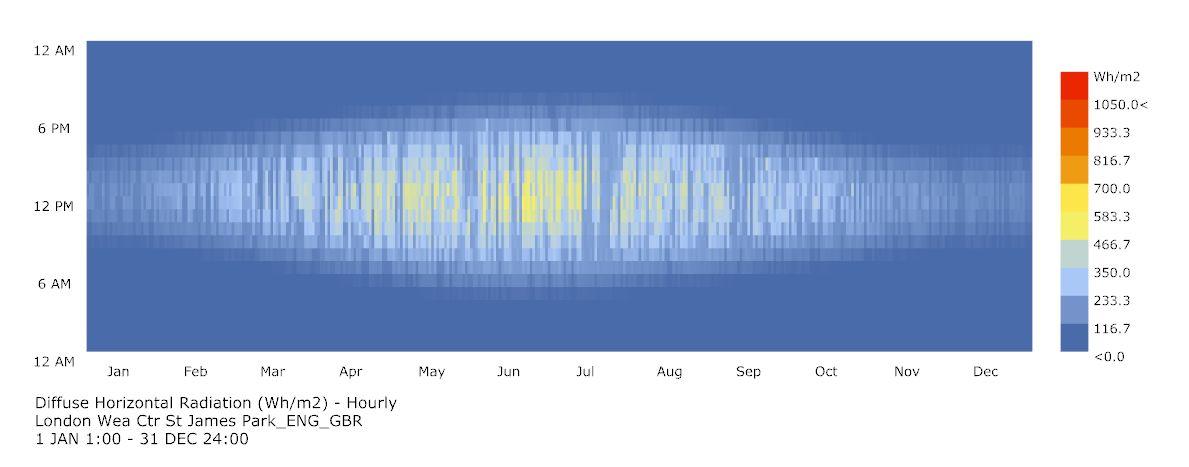
Sun Radiation Study in different Periods
Solar Radiation Annual Period
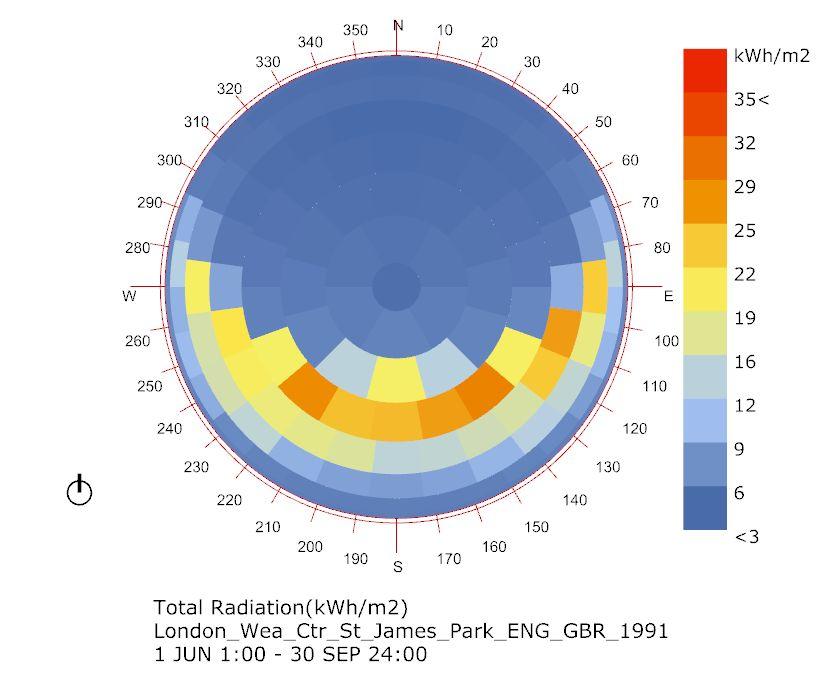
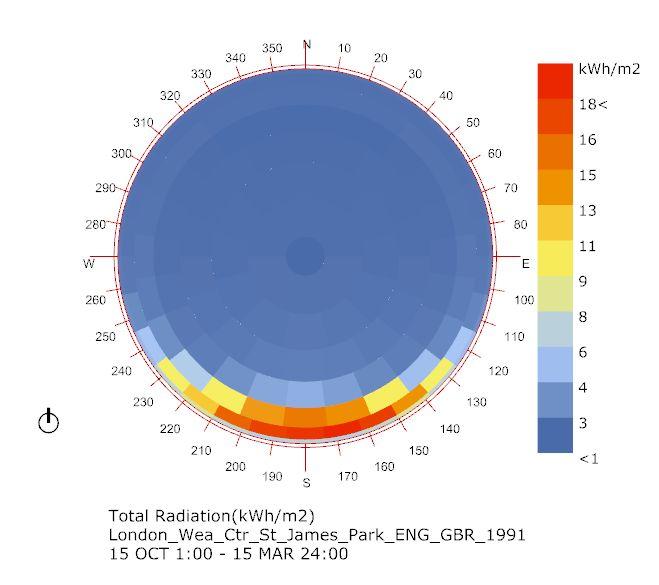
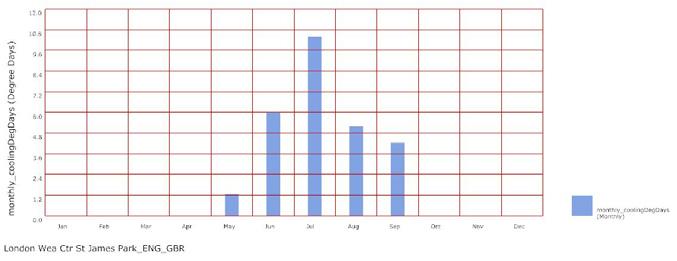
Solar Radiation Cooling Period
Solar Radiation Heating Period
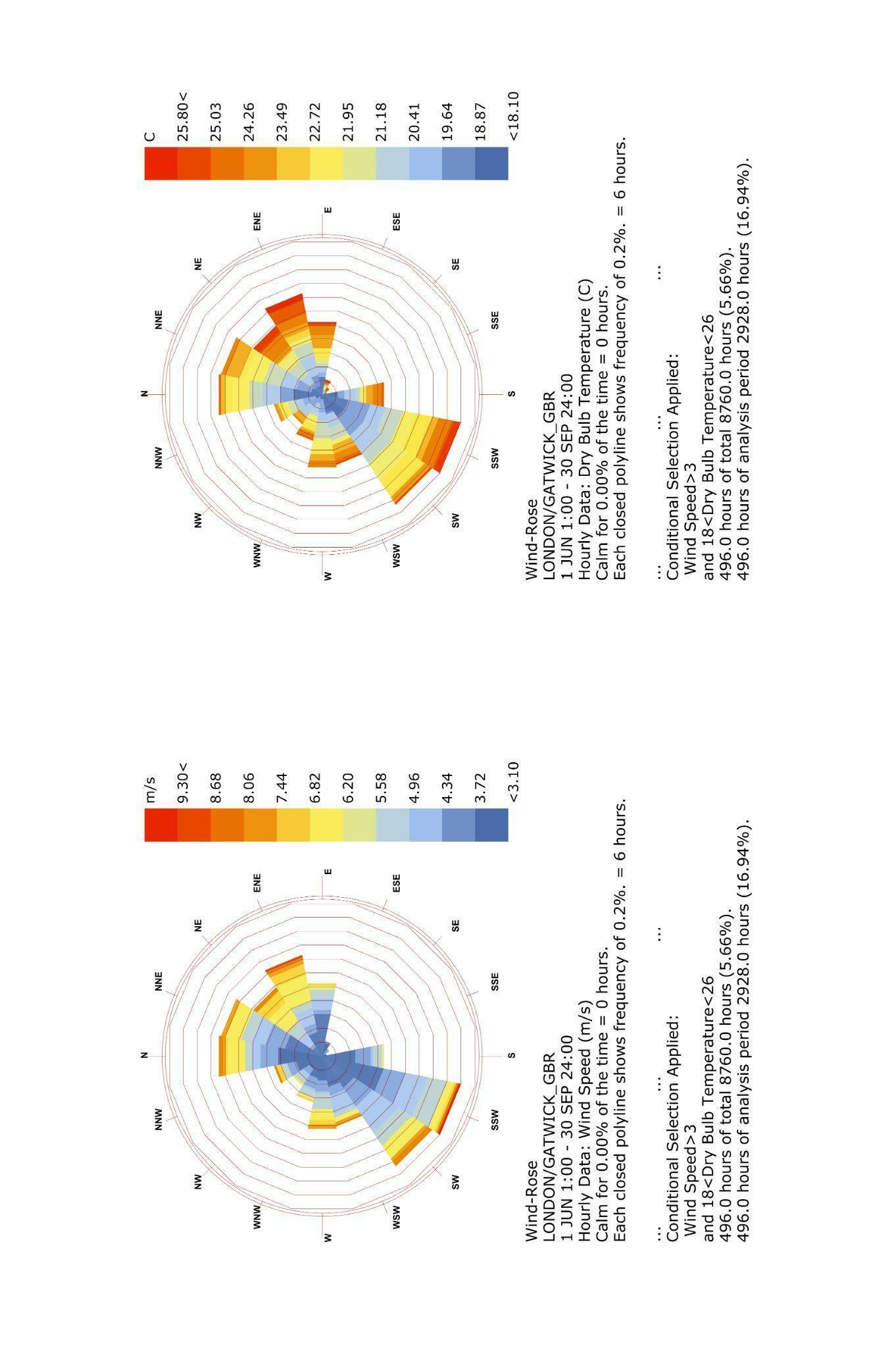
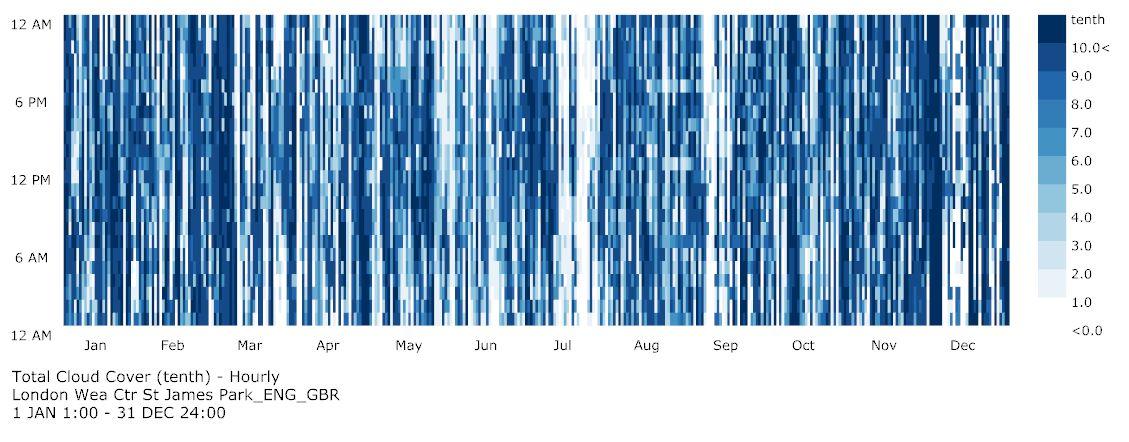
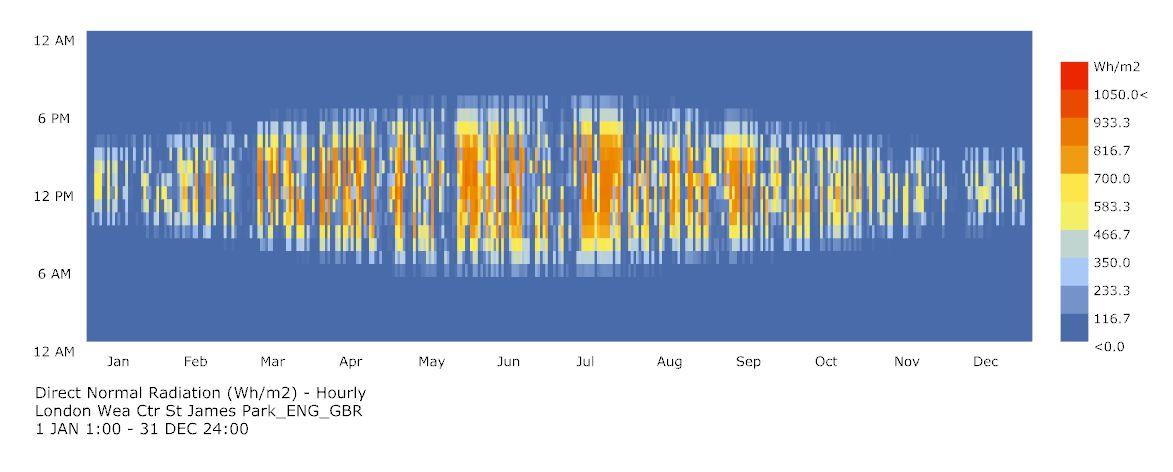
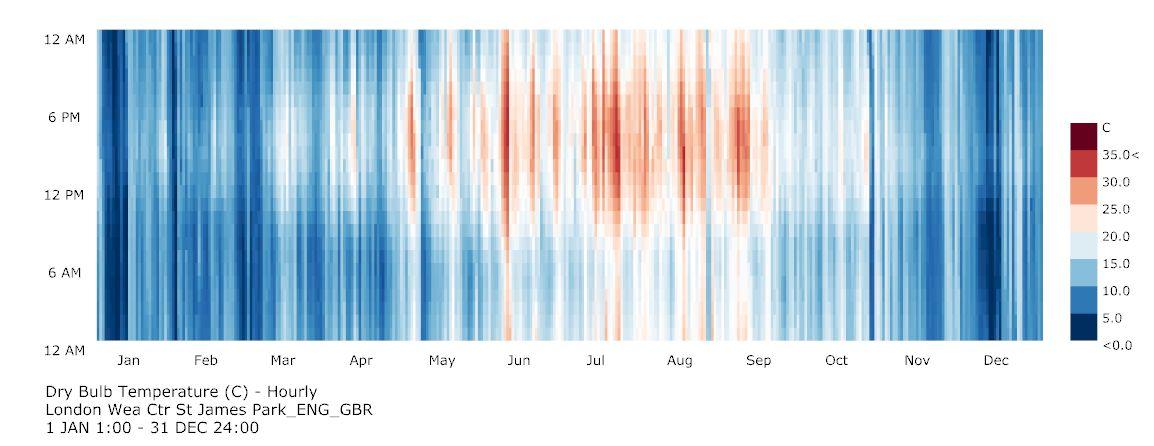
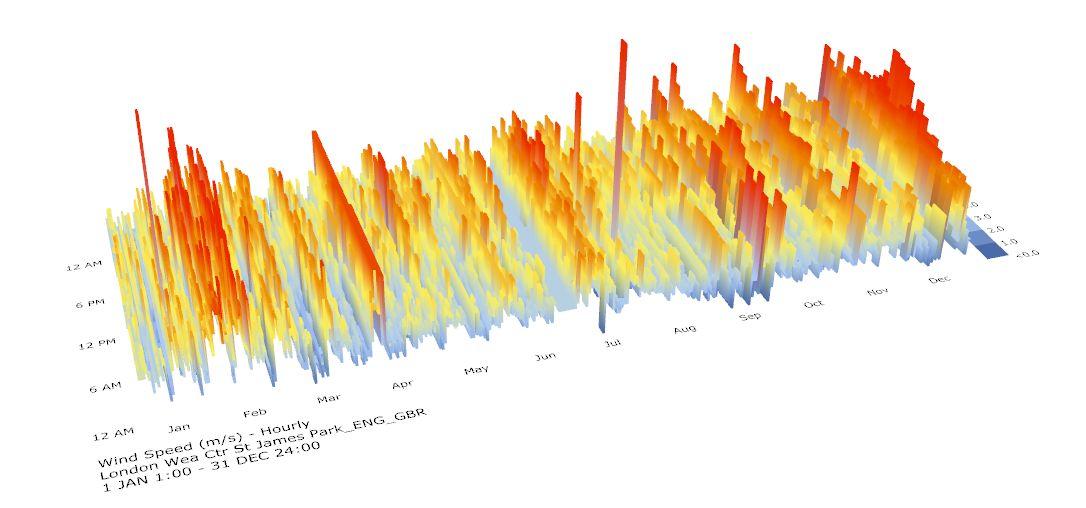
AIR TEMPERATURE
Basic climatic charting/ Hourly
Basic climatic charting/ Hourly
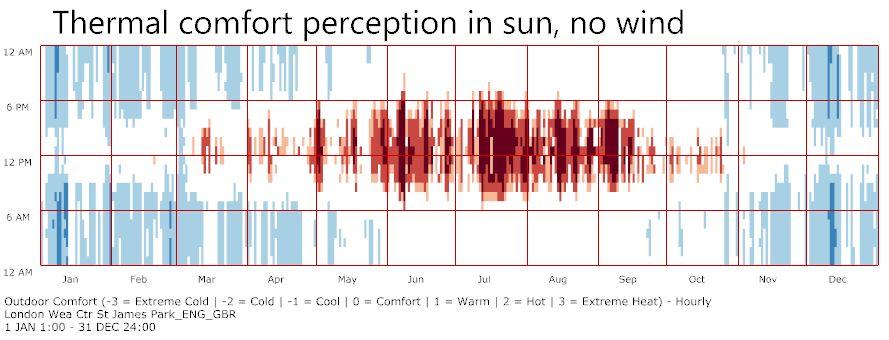
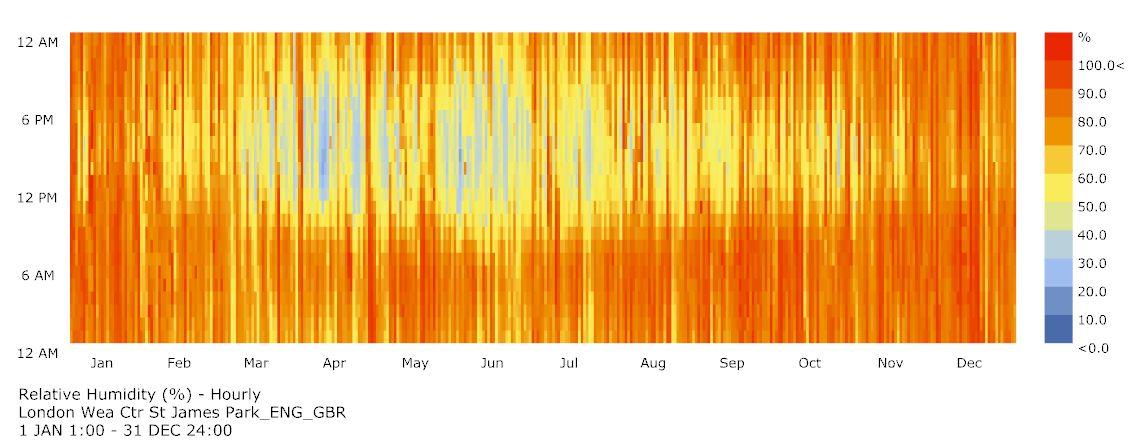
WINTER W AUTUMN SUMMER SPRING HUMID/ COMFORTABLE DRY DRY
RELATIVE HUMIDITY
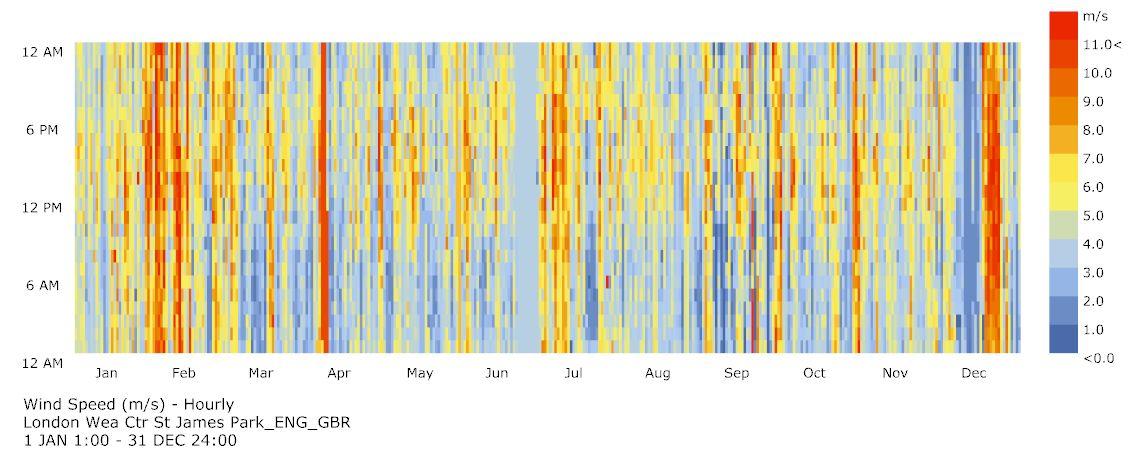
WINDY
Basic climatic
WINDY CALM Quite high levels of direct normal radiation SOLAR RADIATION DIRECT NORMAL RADIATION SOLAR RADIATION DIFFUSE RADIATION SOLAR RADIATION GLOBAL RADIATION Clear/ Partly-cloudy Cloudy
COVER
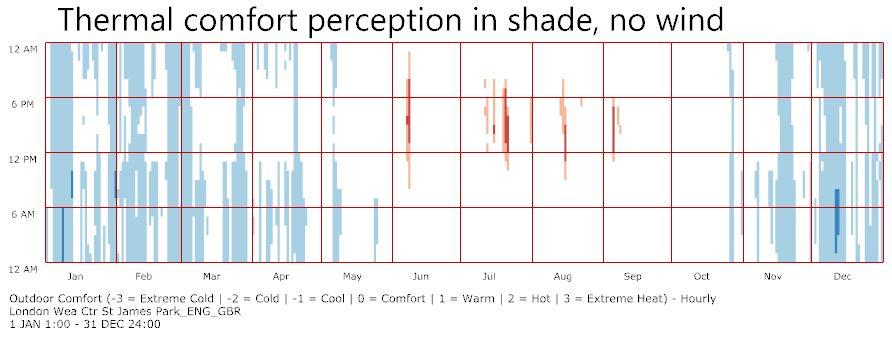
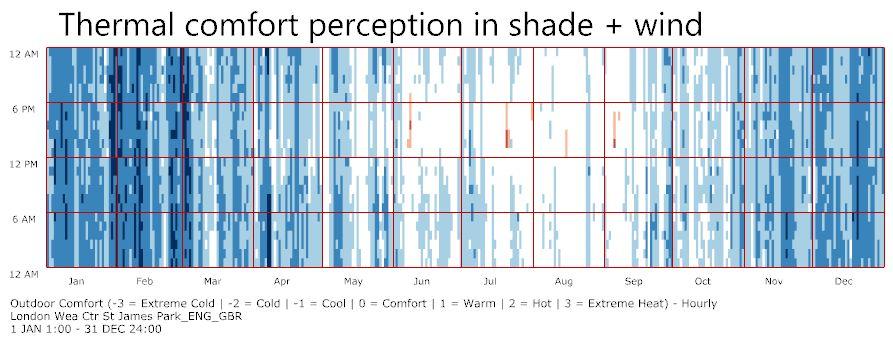
cover - Hourly Cloudy HOT EXTREME COLD VERY HOT COOL COOL EXTREME COLD COMFORT COOL NEUTRAL VERY COLD VERY COLD COOL HOT PERIOD COLD PERIOD COLD PERIOD EXTREME COLD EXTREME COLD LOCAL CLIMATIC HOT PERIOD WARM PERIOD MILD PERIOD COLD PERIOD MILD PERIOD COLD PERIOD
WIND SPEED
charting/ Hourly
SKY
Total cloud
LONDON CLIMATE ANALYSIS
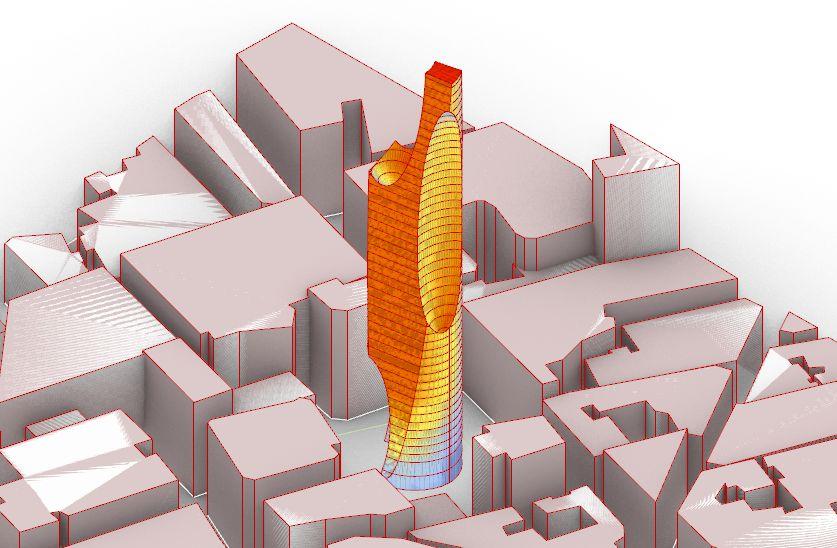
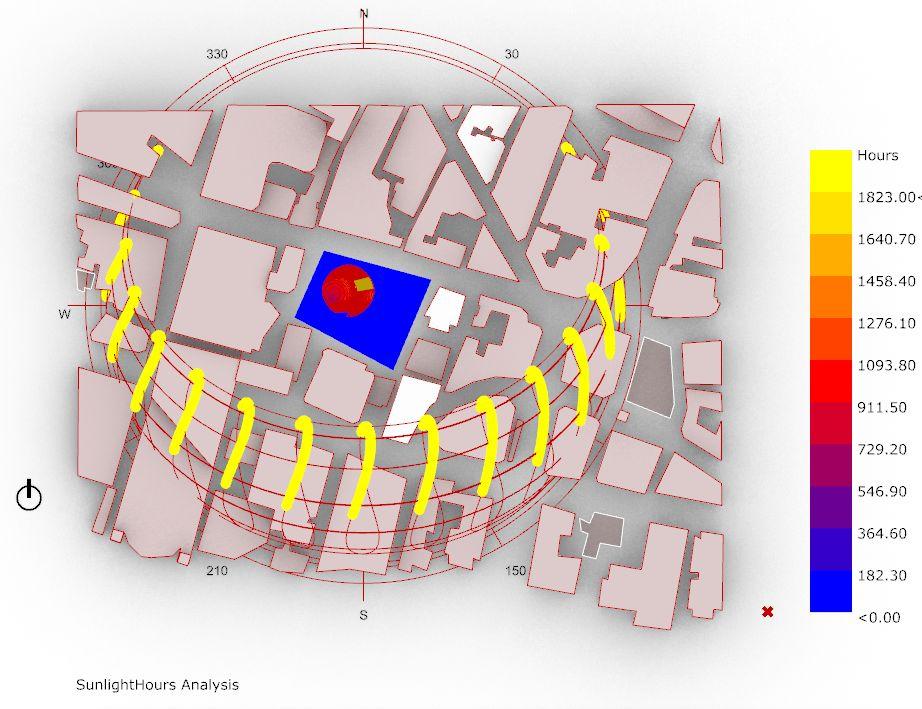
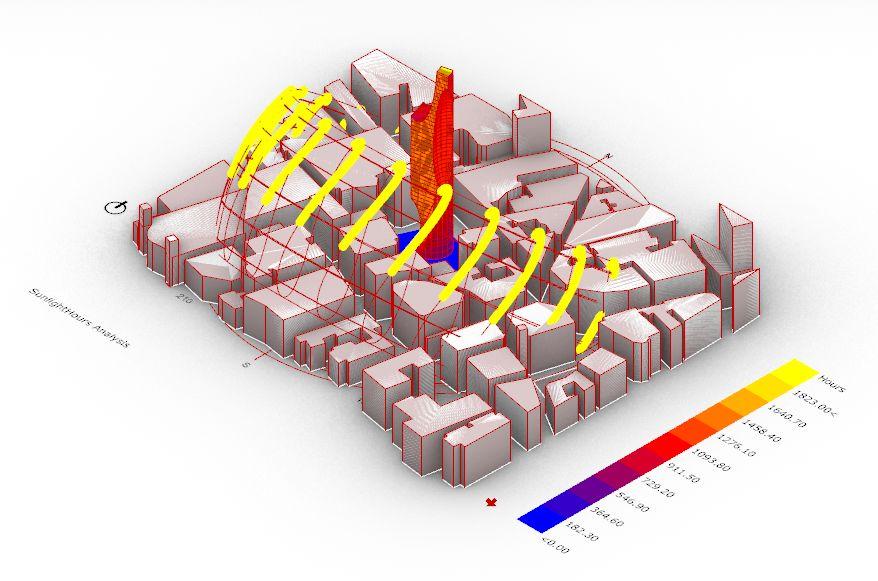
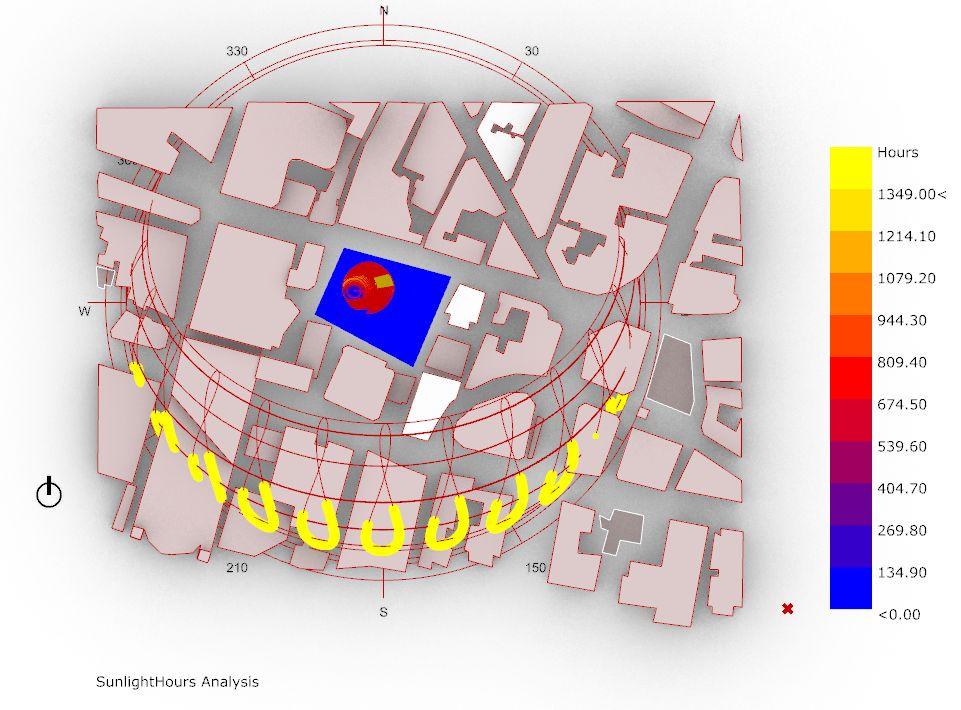
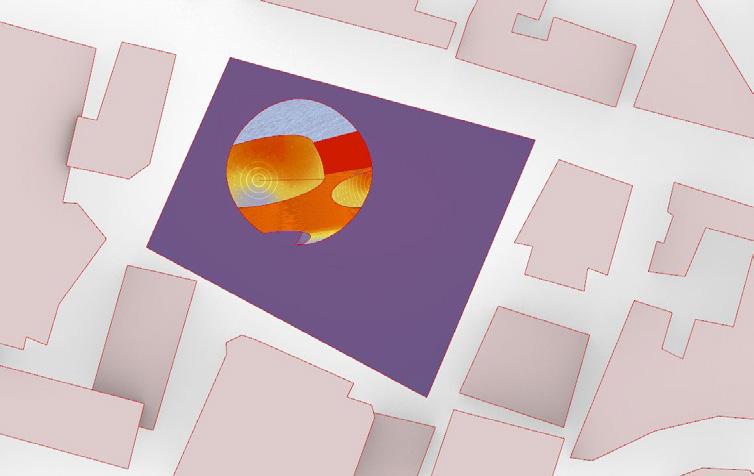
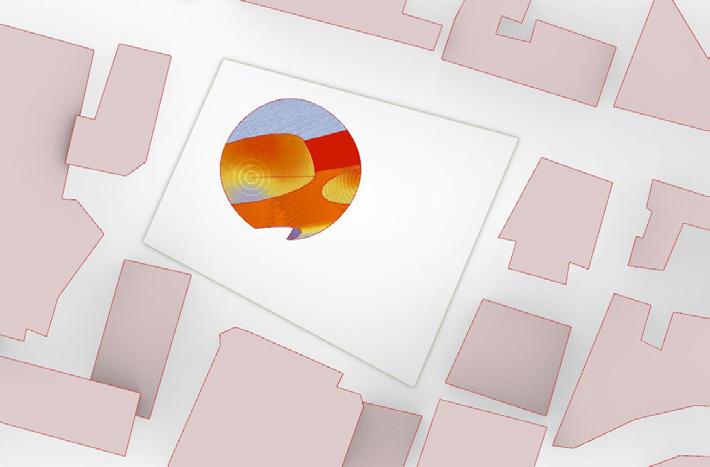
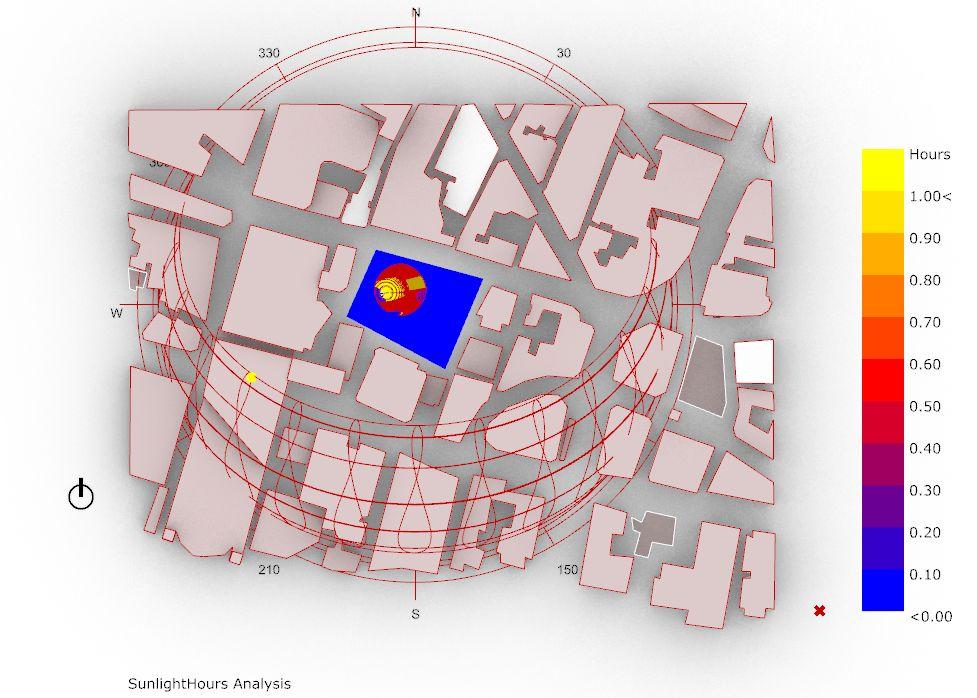
DAYLIGHT SUNLIGHT HOURS SOLSTICES
The maximum solar gains happen at the South West, while the North stays shaded most of the year.
Sunlight-hour analysis for specific day 6th July 15:00

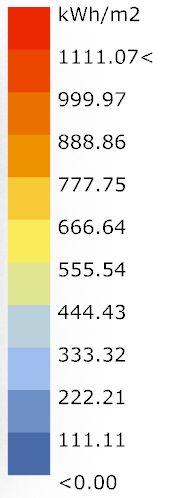
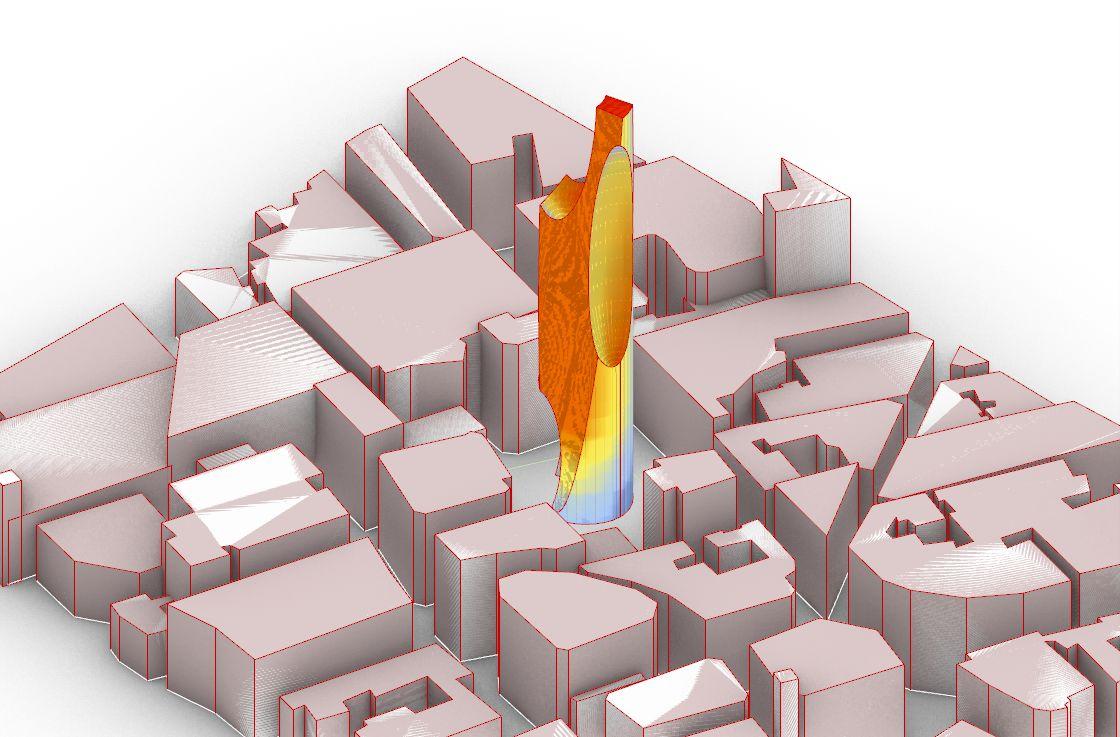
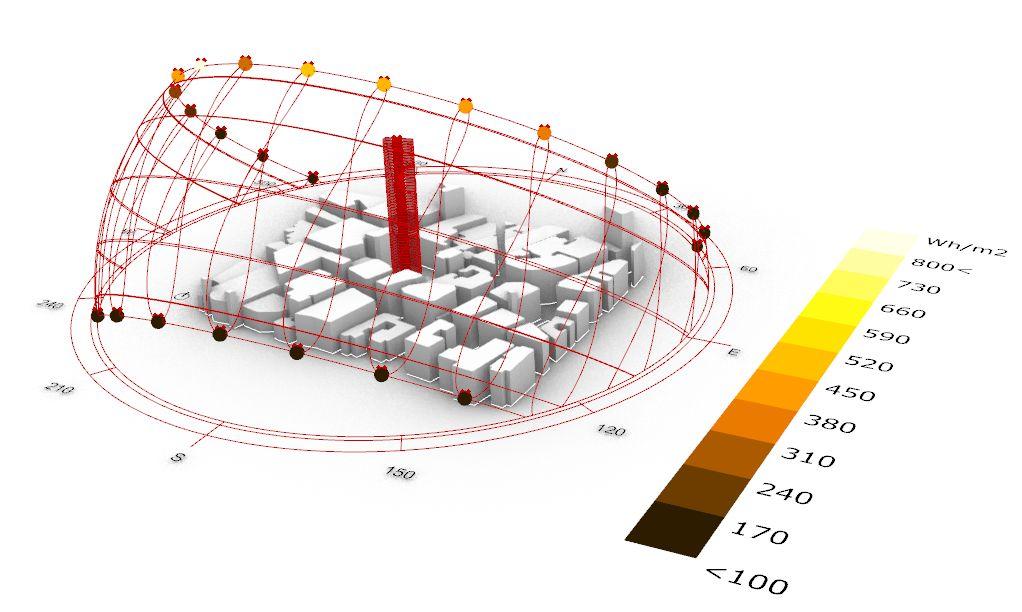
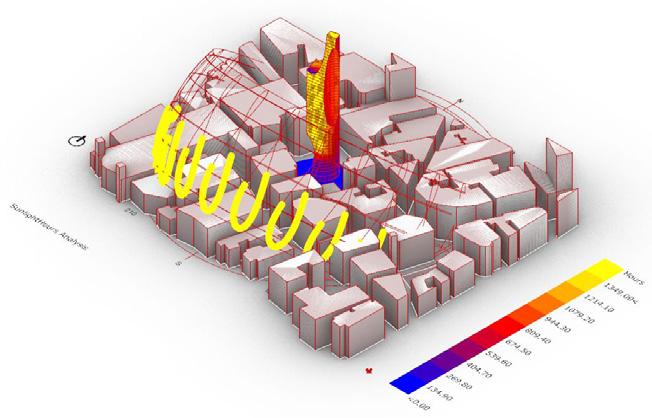
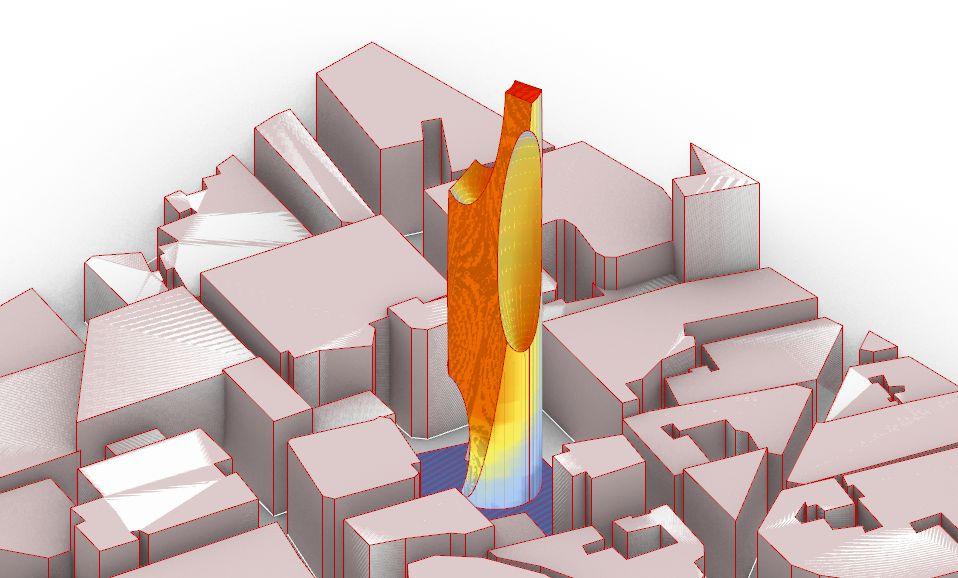
DAYLIGHT SOLAR IRRADIATION SOLSTICES
Sunlight-hour analysis for the winter solstice
Sunlight-hour analysis for the summer solstice
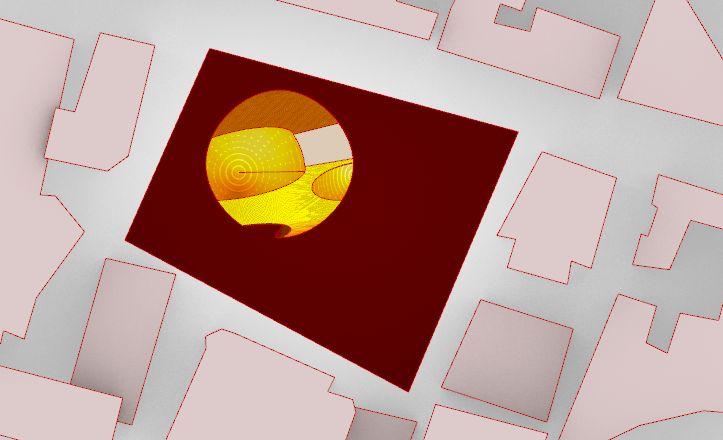
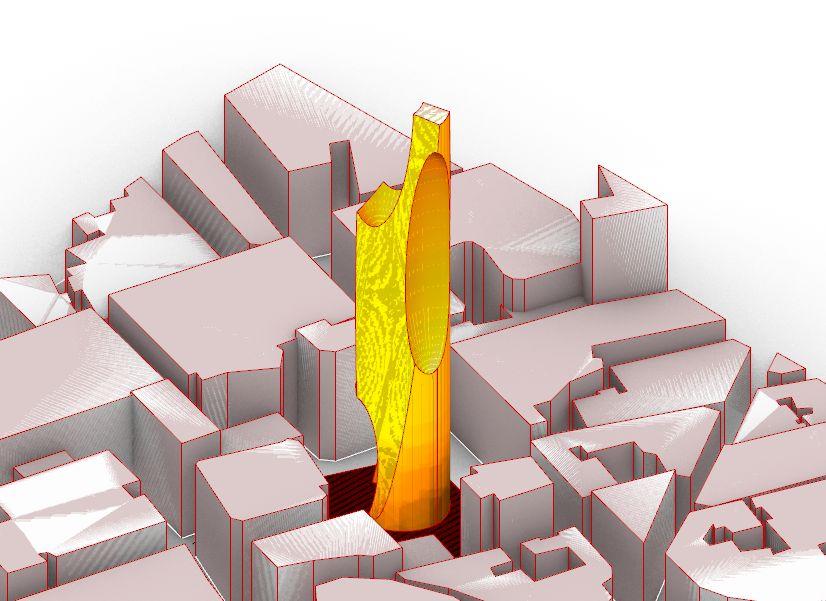
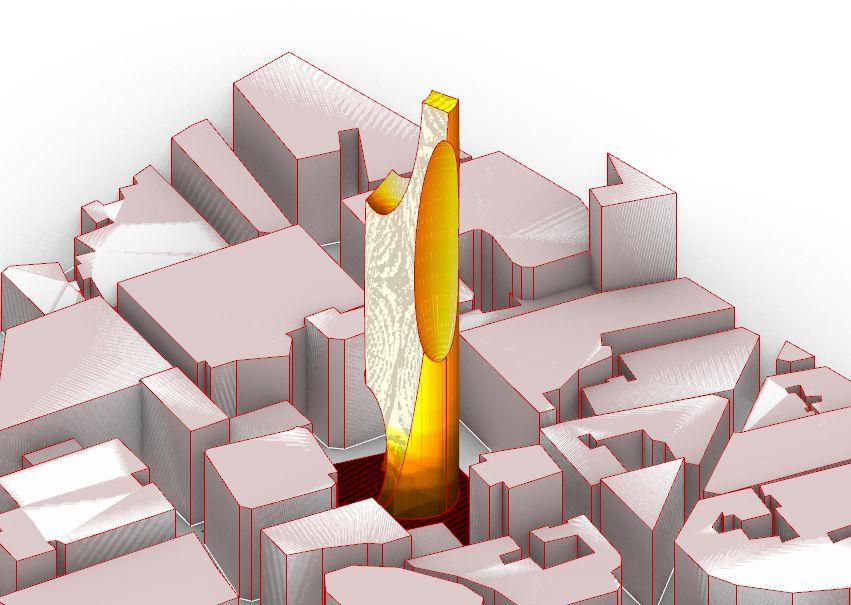
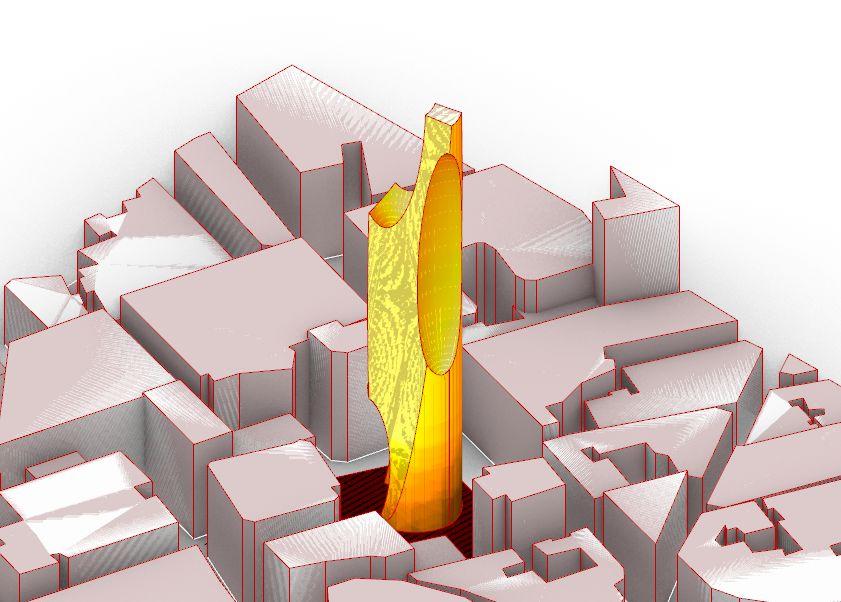
In the building geometry it shows that the top part of the tower receives higher solar irradiation compare to the bottom floors
Irradiation analysis for Massing and site

Irradiation analysis for Massing
Irradiation analysis for windows simulation

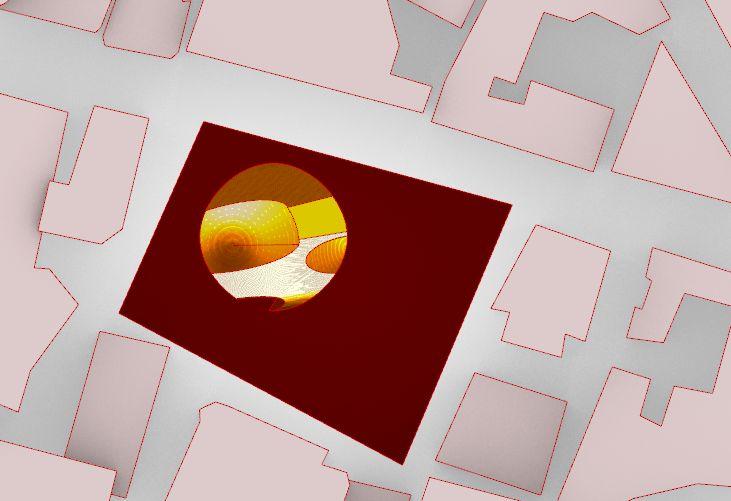
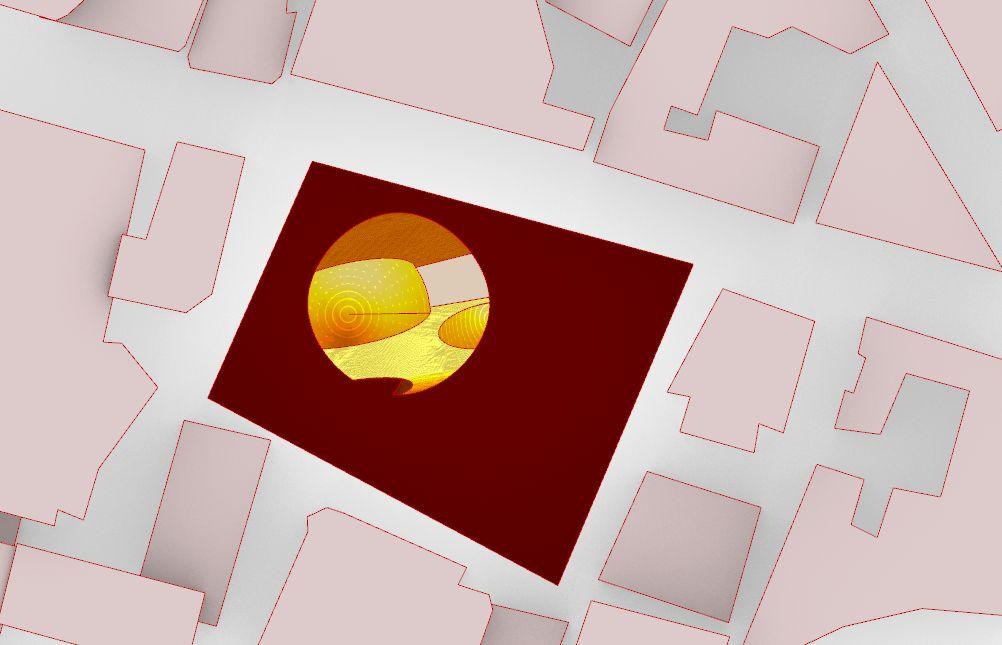
DAYLIGHT INSOLATION
Insolation analysis for Massing and site

Low angle radiation especially in winter could cause potential glare issues.
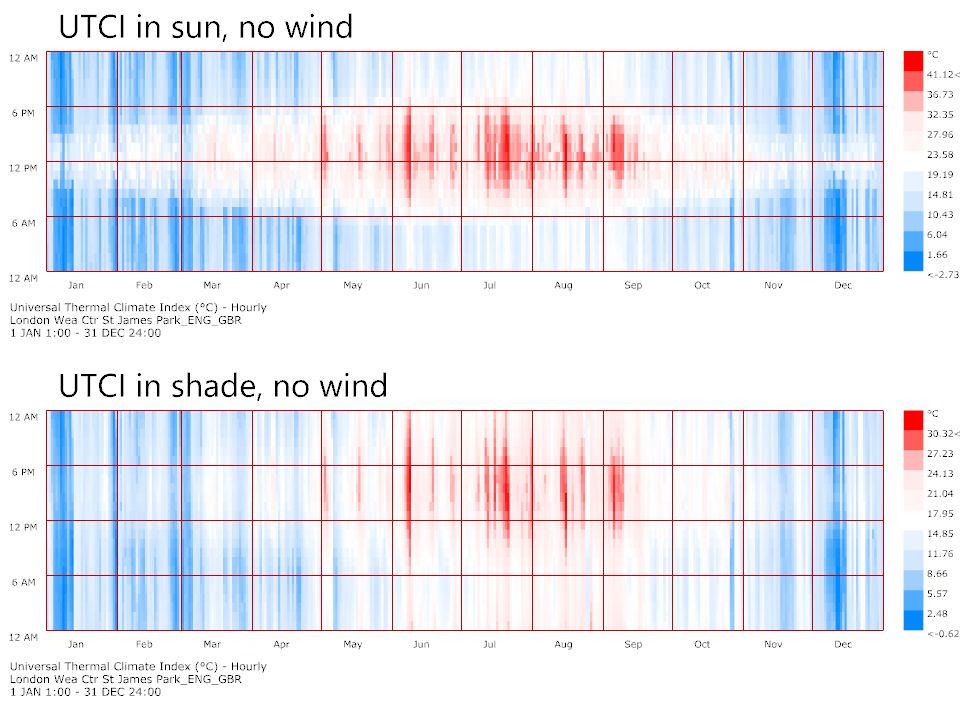
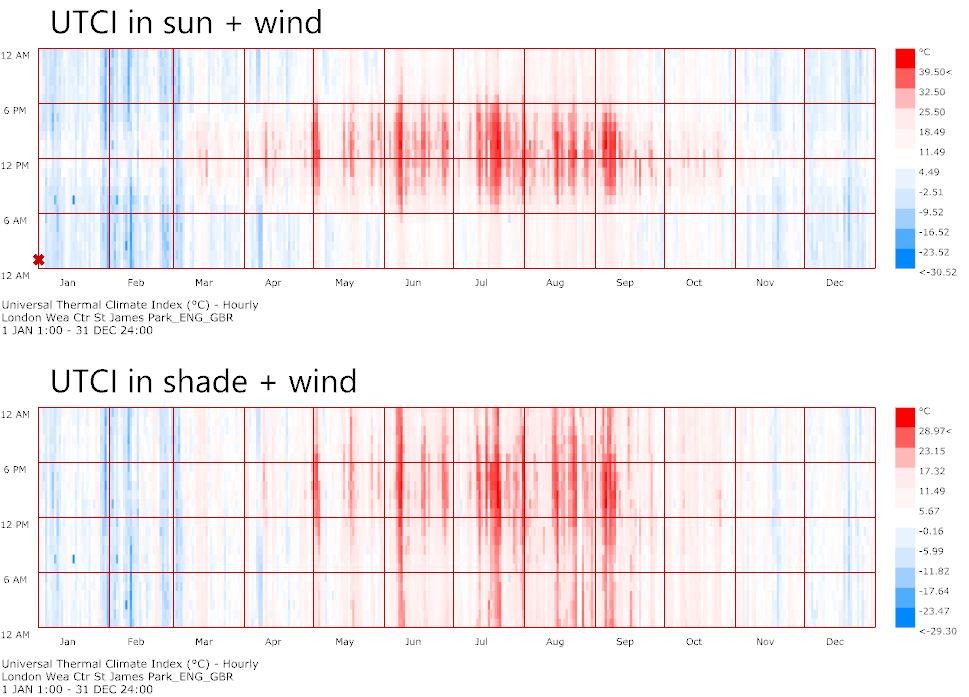
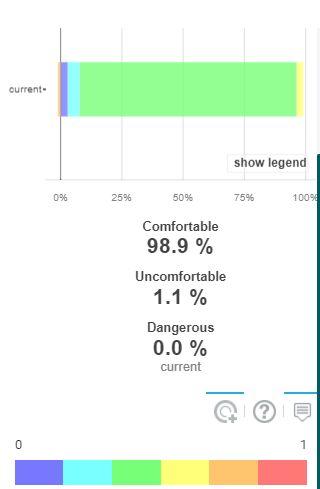
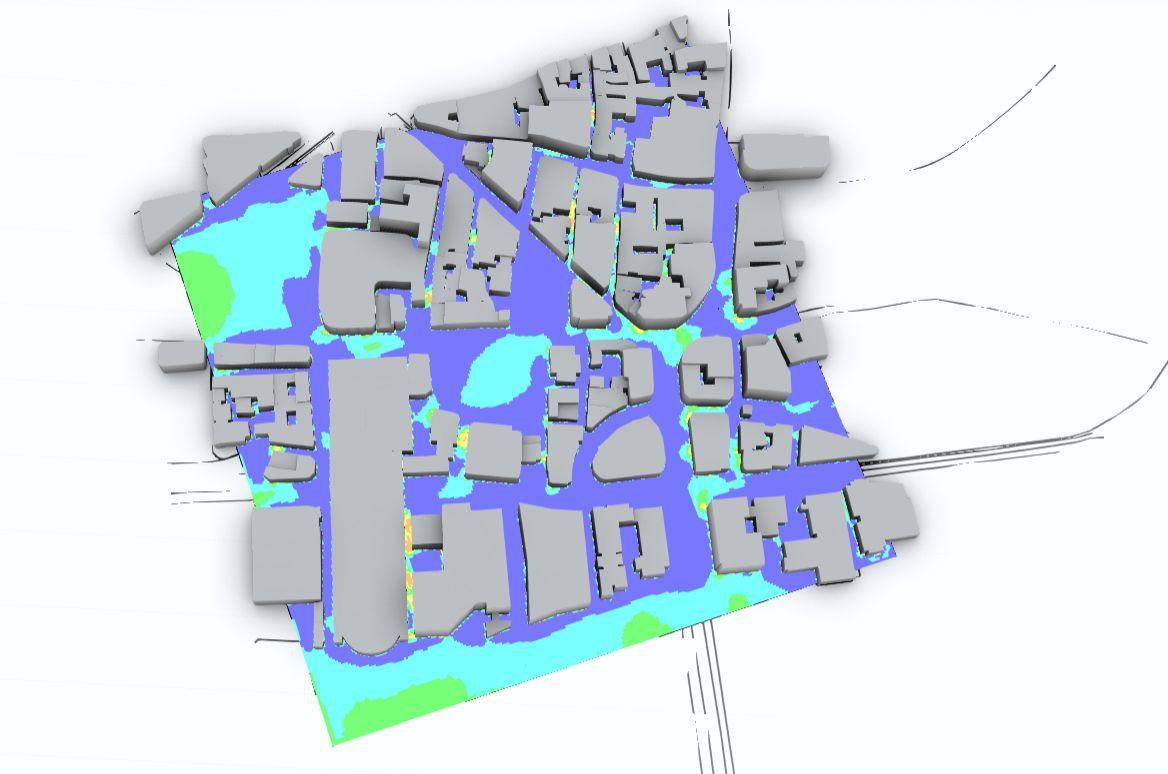
THERMAL COMFORT - UTCI PERCEPTION
15th of Aug.
9:00 am 15:00 am 12:00 a m 18:00 am
THERMAL COMFORT - UTCI PERCEPTION
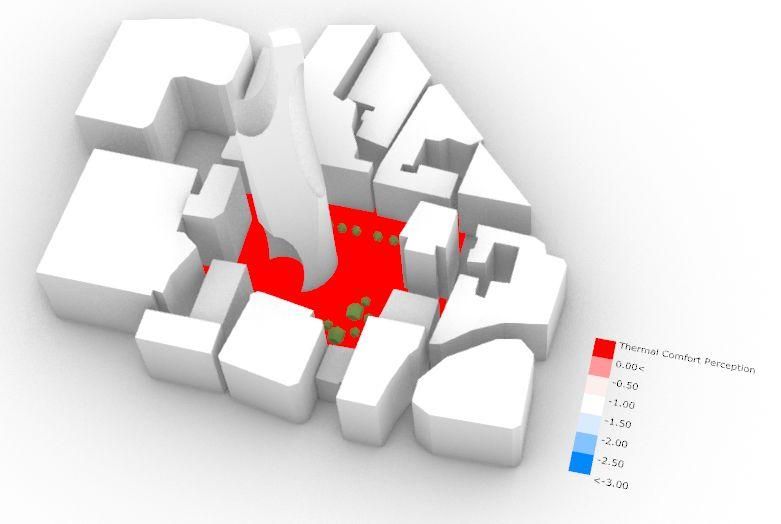


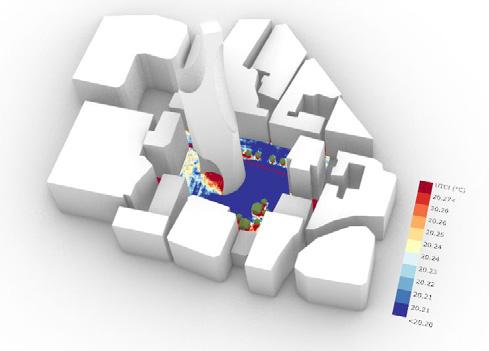
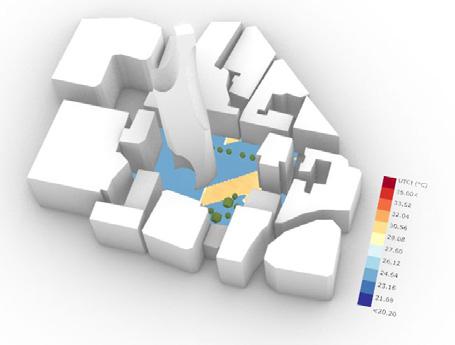
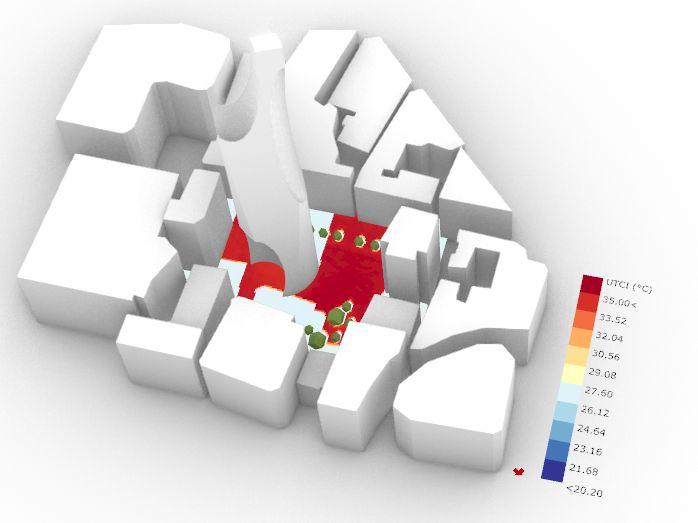
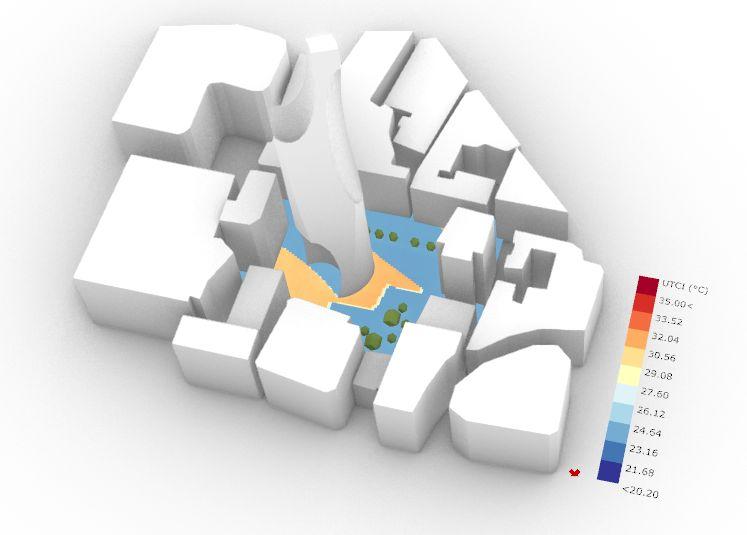
15th of Aug.
9:00 am 12:00 am 15:00 am 18:00 am
Annual Insolation analysis Heating Period Insolation analysis Cooling Period Insolation analysis
LONDON CLIMATE ANALYSIS
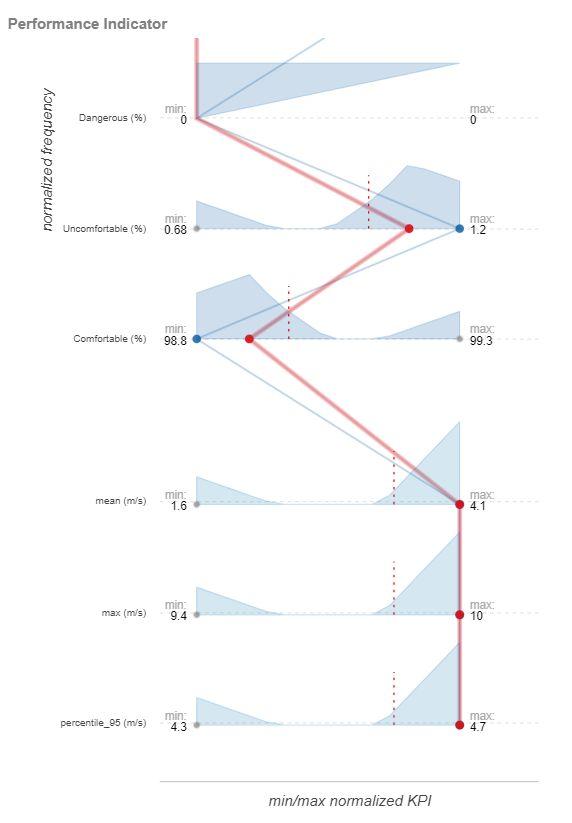
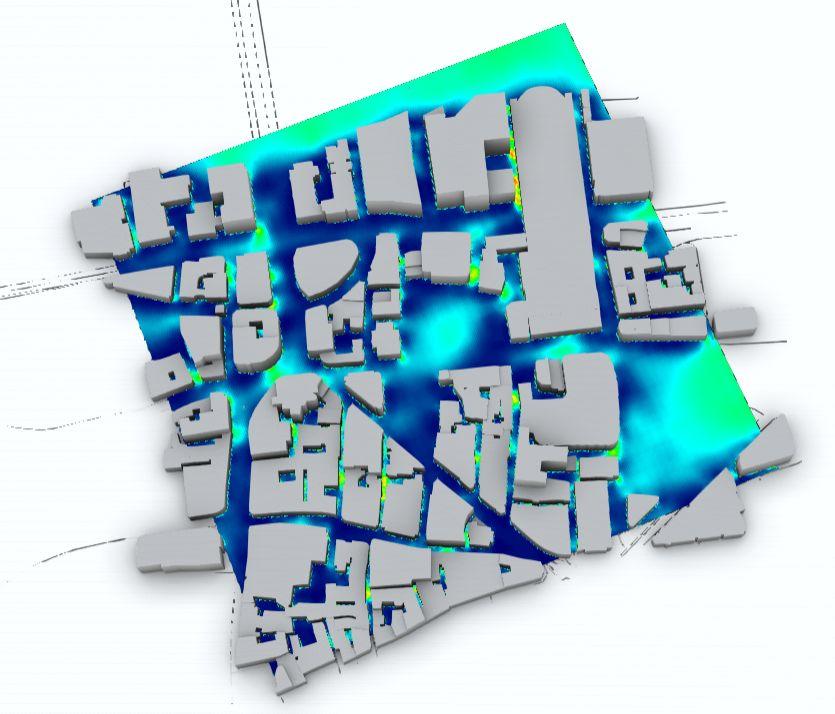
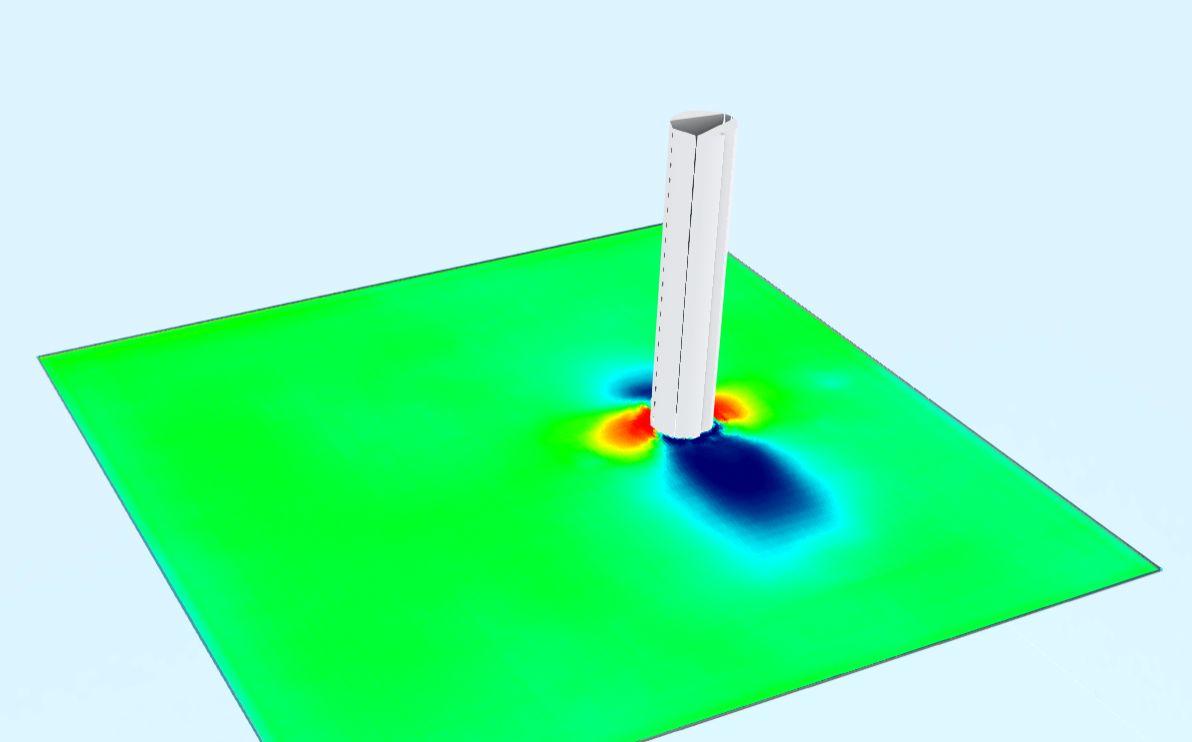
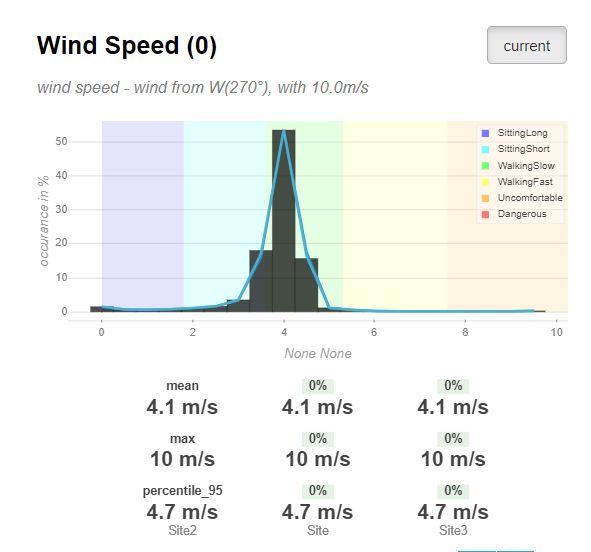
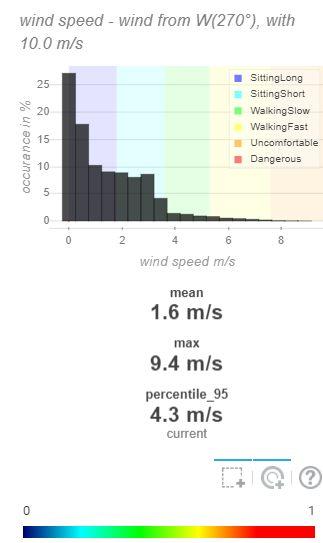
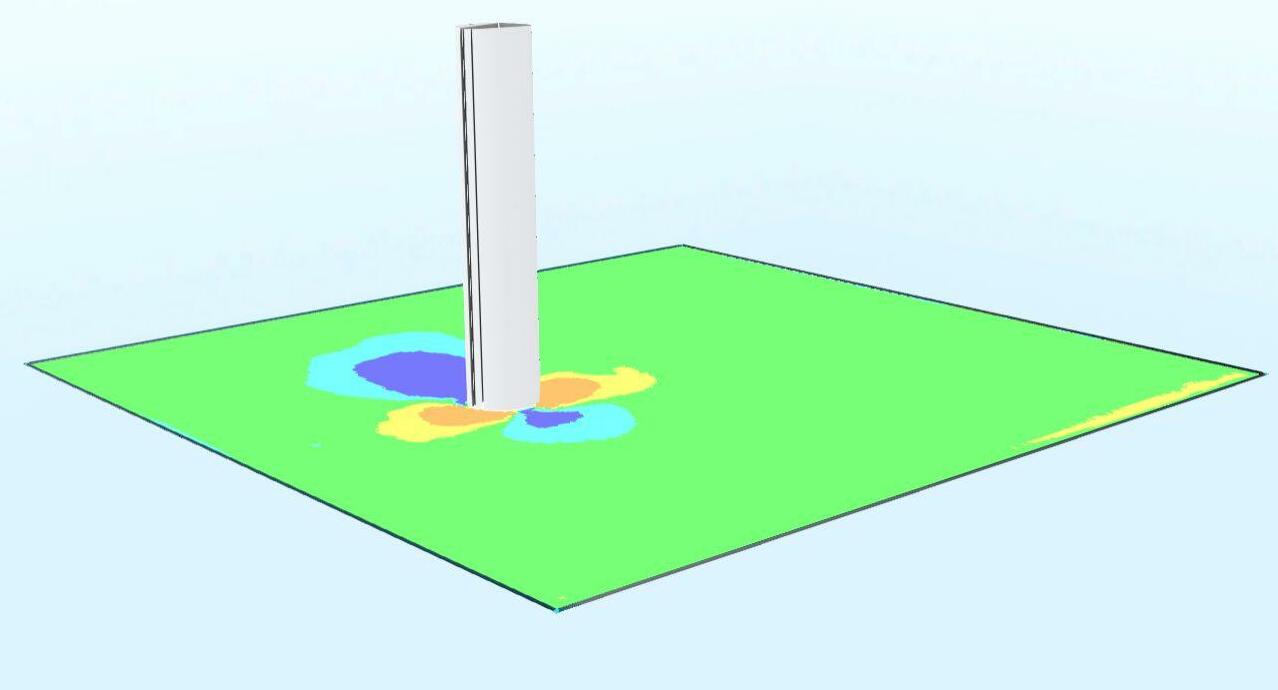
Wind Speed
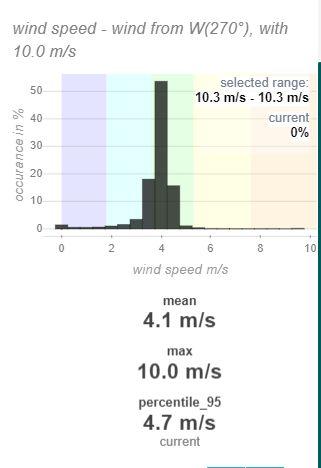
InFraRed Project Name: Tower Root: Origin Site
Wind Speed Comparison
Wind Comfort
InFraRed
Project Name: Tower Root: Origin
Wind Comfort Comparison
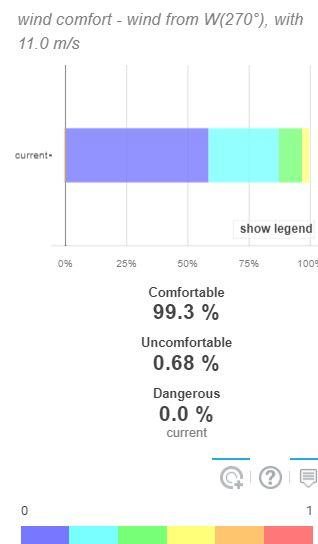
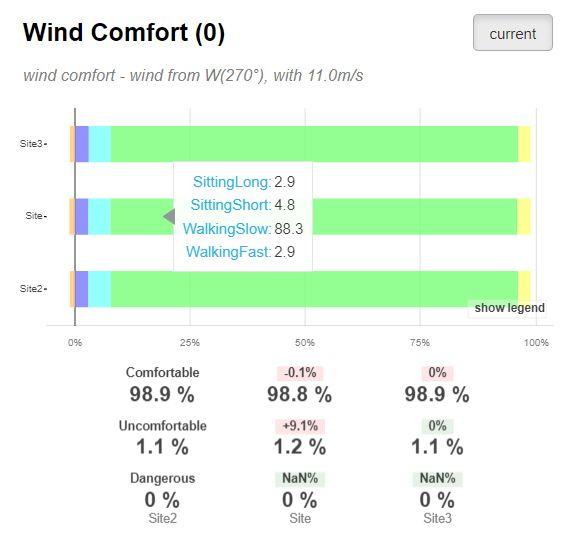
The predominant wind is usually comes from the west.
We tried to rotate the main concave entrance of the tower in three different direction to examine the outdoor wind comfort.
but the result was almost the same cause the tower takes a circular shape.
WHAT IS MY PLAZA FOR?
15
Date: 2022
Location: Madrid, Spain
Collaborators: Jumana Hamdani Lucía Leva, Pablo Antuña Molina
Instructor: Gabriella Rossi
Project Type: Academic at IAAC
Tools: Rhino,Grasshopper, Python, Google Colab, Open Street Maps, Self Organizing MapsKohonen Maps, Hops, Shallow Learning, ANN Learning, PCA, EDA, Classification Machine Learning model
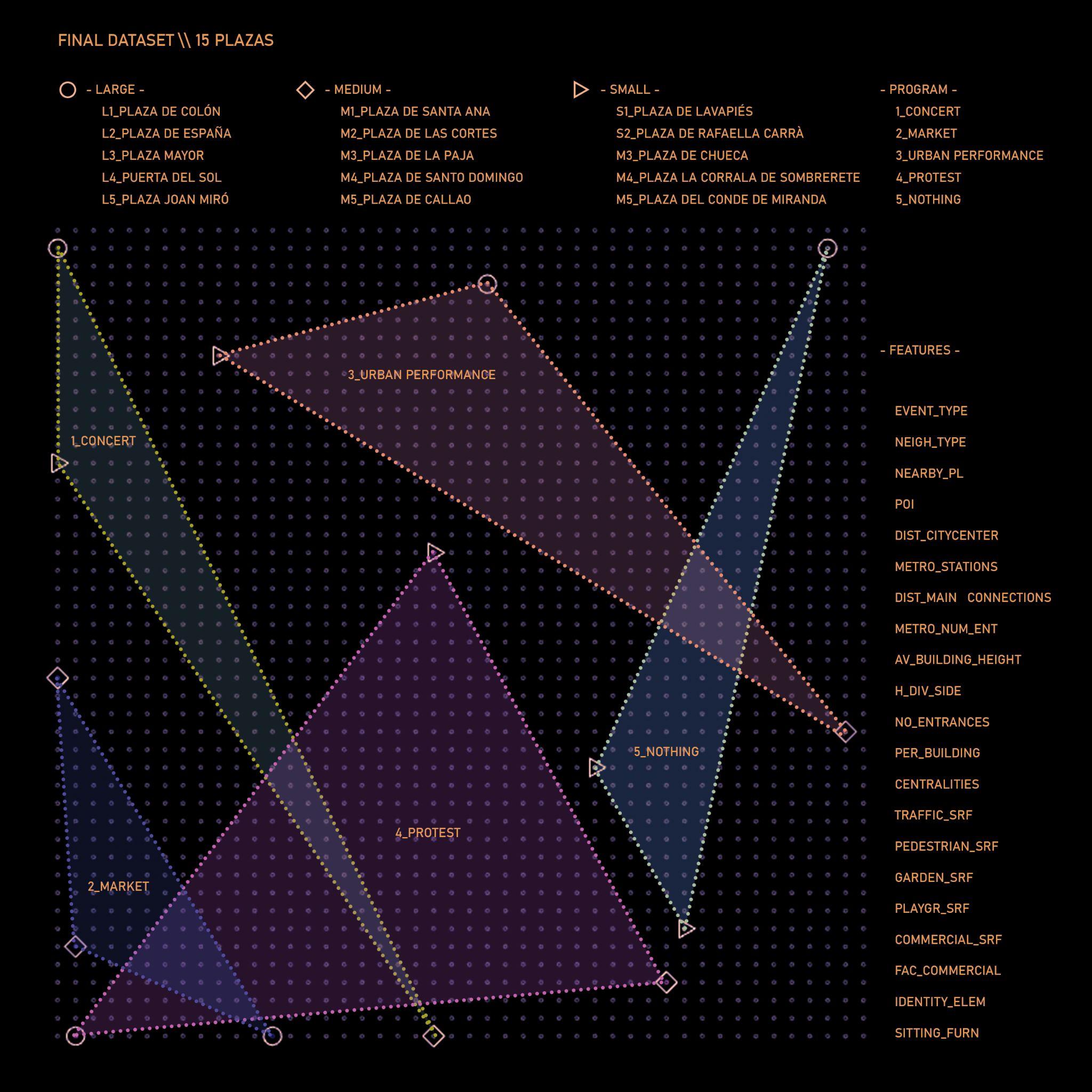
WHAT IS MY PLAZA FOR?
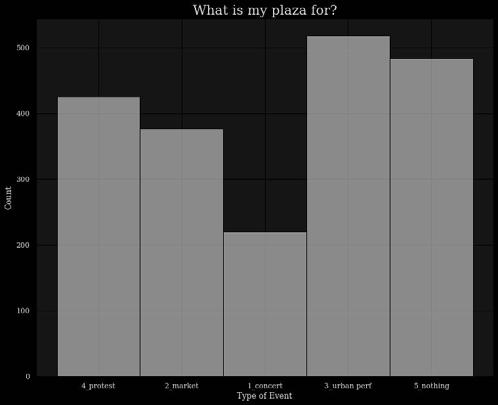
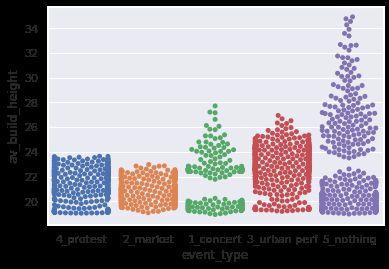
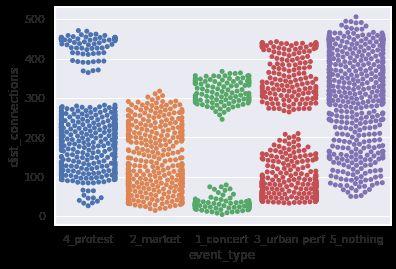
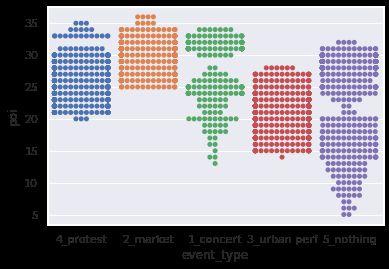
What is my plaza for? aims to predict the possibility that a given event will occur in a urban plaza according to different factors associated with the features of the public space.
Based on traditional urbanism indicators, a critical analysis is carried out through a machine learning process to evaluate the resilience of the spaces designed for the community.

WHAT IS MY PLAZA FOR?
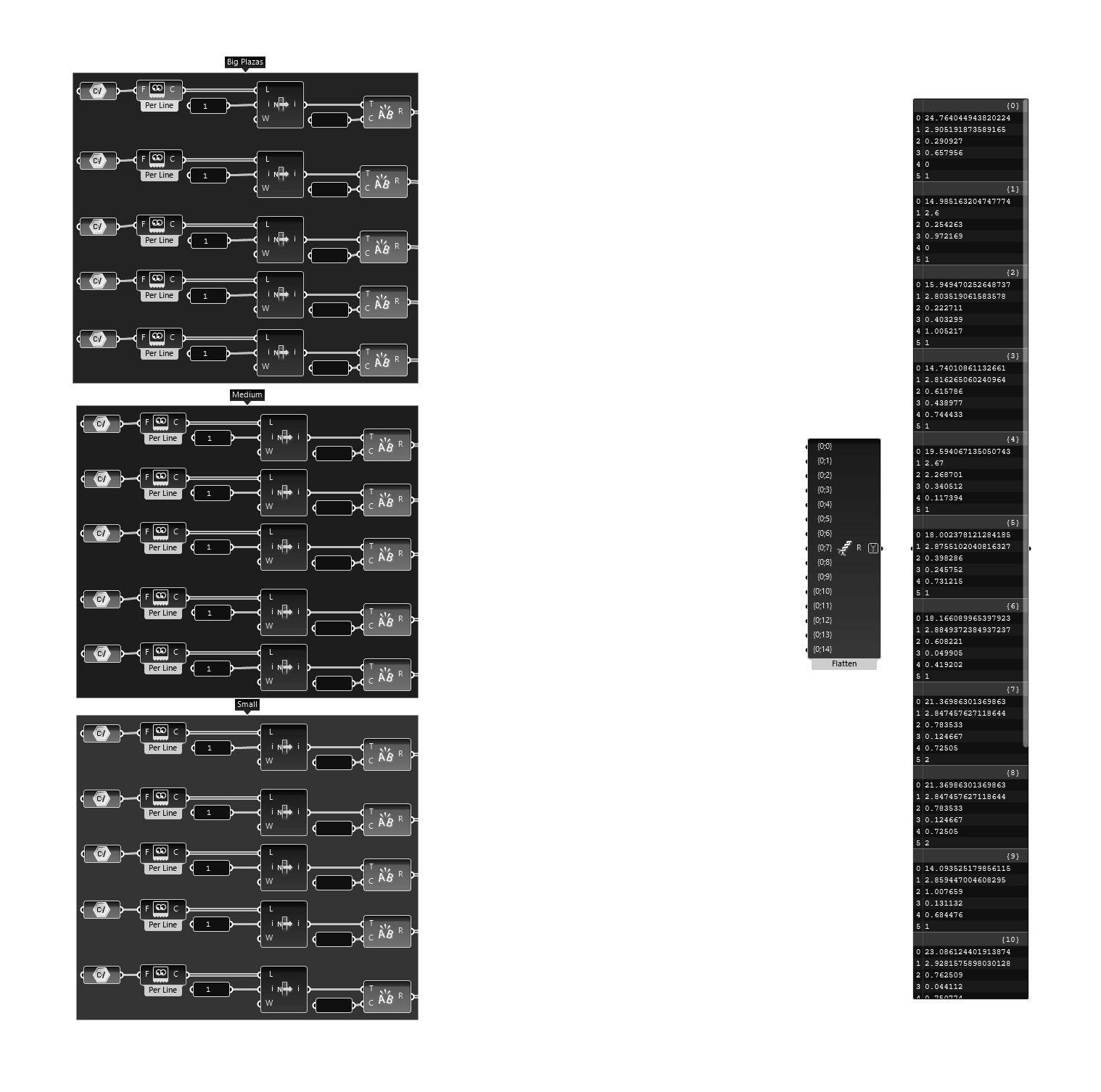
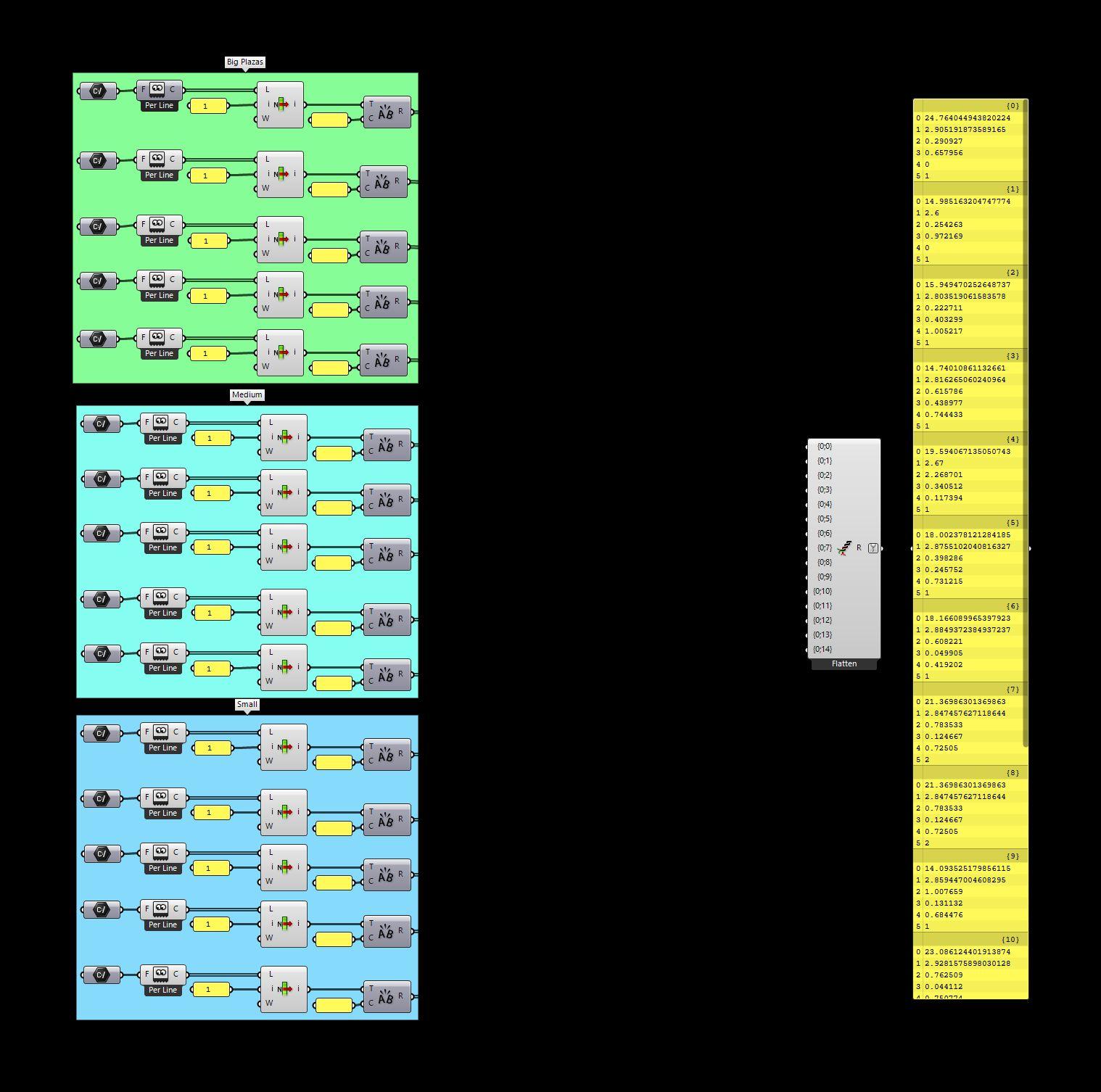
GEOMETRY GENERATION
# BIG PLAZAS big1 = (40.4248508, -3.6890901553611517)
big1l = 'b1_plazacolon' big2 = (40.4231703, -3.7125722)
big2l = 'b2_plazaespana' big3 = (40.415392, -3.7073743182788528)

big3l = 'b3_plazamayor' big4 = (40.4168624, -3.7043032918742496)
big4l = 'b4_puertadelsol' big5 = (40.4528601, -3.6918548) # Plaza Joan Miró big5l = 'b5_plazajoanmiro'
# MEDIUM PLAZAS med1 = (40.41480405,-3.700791305837731) # Plaza de Santa Ana med1l = 'm1_plazasantaana' med2 =(40.414318300000005,-3.7018736655575606) # Plaza del Ángel med2l = 'm2_plazaangel' med3 = (40.4129726,-3.7115924640117006) # Plaza de la Paja med3l = 'm3_plazapaja' med4 = (40.420003699999995,-3.7086054878361954) # Plaza de Santo Domingo med4l = 'm4_plazadomingo' med5 = (40.41985725,-3.705811999578338) # Plaza de Callao med5l = 'm5_plazacallao' med6 = (40.415769444444, -3.6966277777778) # Plaza de las Cortes med6l = 'm6_plazacortes'
# SMALL PLAZAS sma1 = (40.40876035,-3.7011310653563037) # Plaza de Lavapiés sma1l = 's1_plazaLavapiés' sma2 = (40.423085400000005,-3.7009577744619797) # Plaza de Raffaella Carrà sma2l = 's2_plazacarra' sma3 = (40.41146565,-3.710911327563633) # Plaza de la Puerta de Moros sma3l = 's3_plazamoros' sma4 = (40.40806785,-3.702809551597745) # Plaza de la Corrala de Sombrerete sma4l = 's4_plazacorrala' sma5 = (40.4148187,-3.7094801592775593) # Plaza del Conde de Miranda sma5l = 's5_plazamiranda' sma6 = (40.422691666667, -3.6975972222222) # Plaza de Chueca sma6l = 's6_plazachueca'
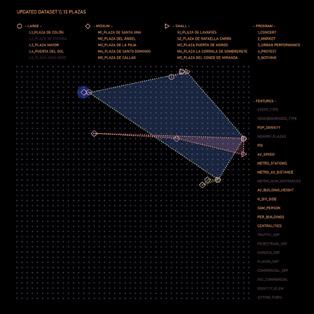
The analysis of the initial 15 study case is reduced to plazas located the city of Madrid. This decision simplifies the process by assuming that all the items share same cultural and environmental conditions To try to include as many urban situations as possible in this research, squares of different sizes (small, medium and large) have been selected. Therefore, the initial hypothesis considers the probability of any of our target events occurring in a place is much more dependent of its design factors than of its size.
SMALL < 2000 m2 2000 < MEDIUM < 7000 m2 LARGE > 7000 m2 S1_ Pl. de Lavapiés S2_ Pl. de Rafaella Carrà S3_ Pl. de Chueca S4_ Pl. de la Corrala S5_ Pl. del Conde de Miranda M1_ Pl. de Santa Ana M2_ Pl. de las Cortes M3_ Pl. de la Paja M4_ Pl. de Santo Domingo M5_ Pl. de Callao L1_ Pl. de Colón L2_ Pl. de España L3_ Pl. de Mayor L4_ Puerta del Sol L5_ Pl. de Joan Miró SMAL L MEDI UM LARGE
# Plaza de colón/Jardines del
# Plaza
España
# Plaza Mayor
#
descubrimiento
de
Puerta del Sol
DATASET CREATION
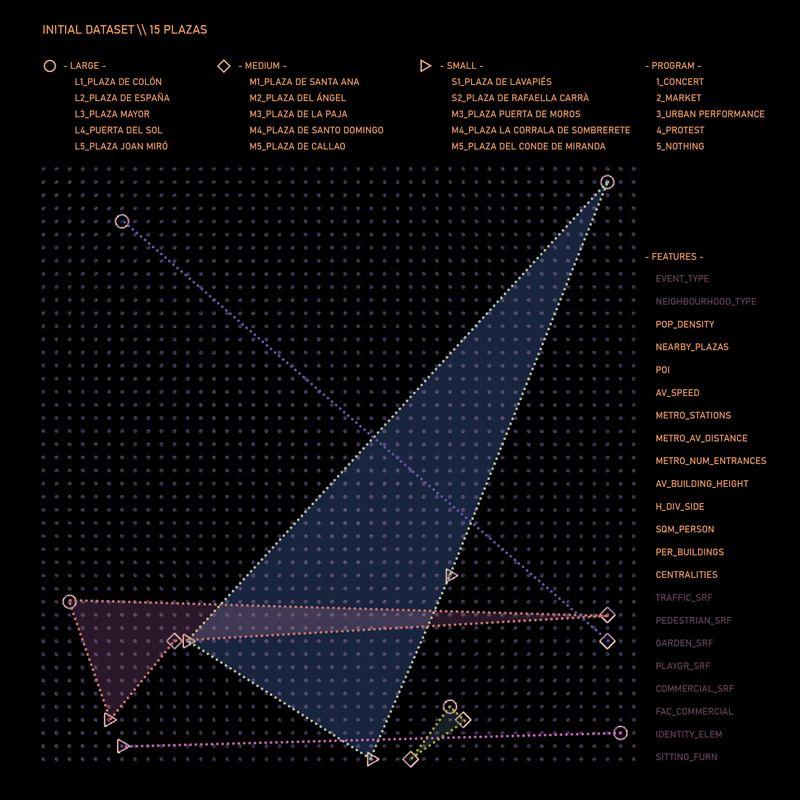
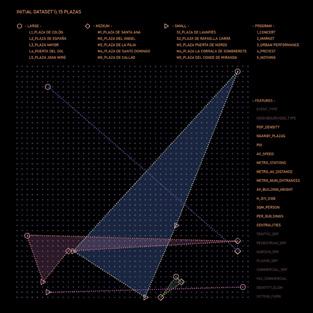
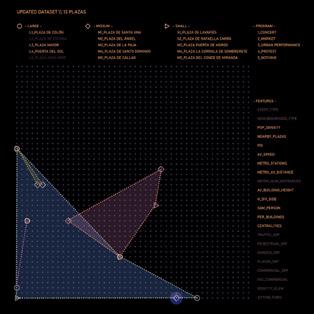
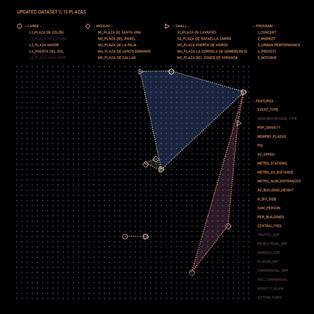
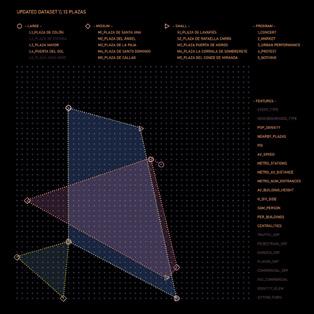
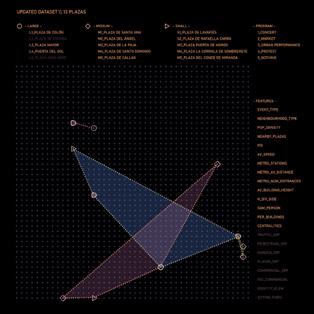
An initial dataset large and balanced enough in samples and urban situations is needed to train the classification model. The process is achieved by generating a Kohonen Map that interpolates the values of the initial squares and produces around 2000 unreal items
After testing different combinations to determine which size of board better allows the seeds to occupy the boundaries of the map (30x70, 40x50 and 45x45), the square ratio of 45x45 seems to produce the most distributed results.
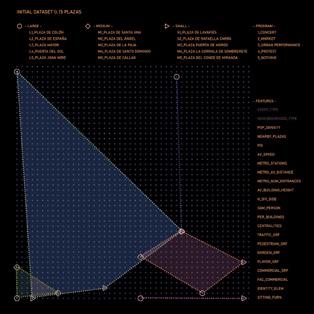
 MAP (SOM)
DATASET - 15 PLAZAS
MAP (SOM)
DATASET - 15 PLAZAS
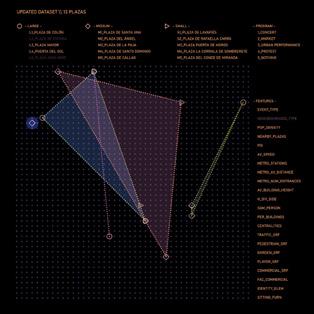
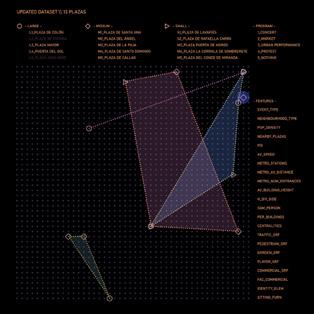
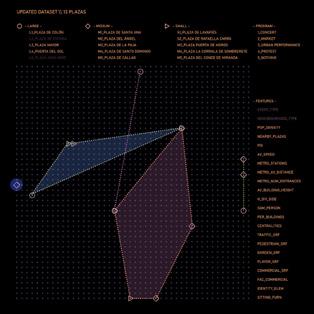
Finally, two of the initial plazas (one small-sized and one medium-sized), whose urban features placed them extremely close to others of different use and, therefore, reduced the number of samples relating to both programs, are replaced for two other items with some geometrical factors that were overlooked in the first analysis.
The two large squares previously excluded, as they positioned themselves on the boundaries and expand the board, are reintroduced as case study.
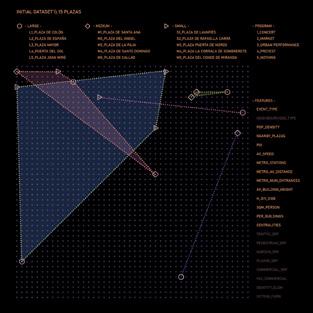
Finally, some of the metrics initially considered are modified or refined with the intention of avoid highly correlated values (directly or indirectly) in the dataset.
These types of variations and backward steps in the creation of our dataset highlight, once again, the complexity of including the appropriate metrics to analyze public spaces without oversimplifying the parameters that define them.
 FINAL
FINAL
426 377 220 518 484 1_Concert /220 2_Market /377 3_Urban Perf /518 4_Protest /426 5_Nothing /484
KOHONEN
WHAT IS MY PLAZA FOR?
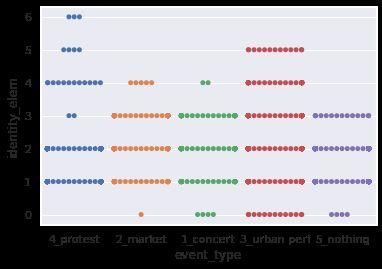
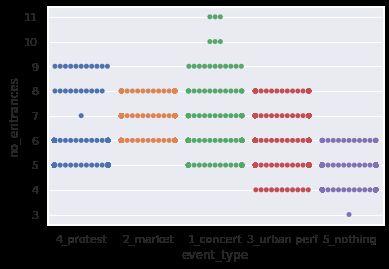
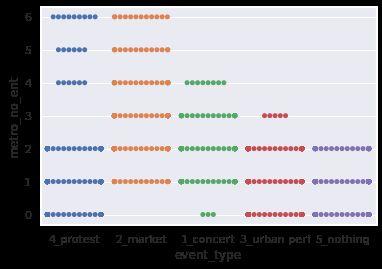
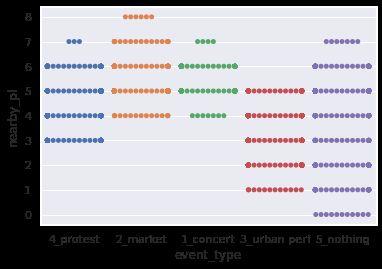
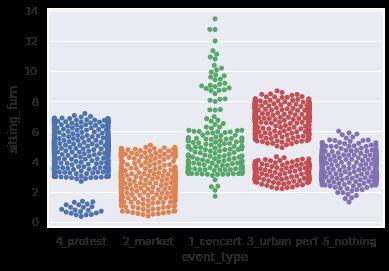
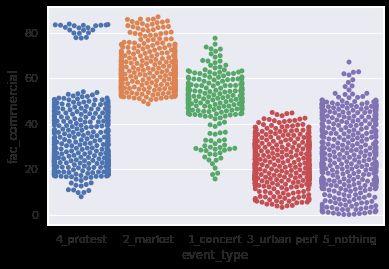
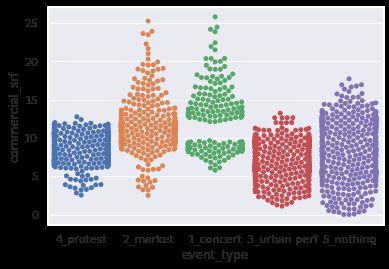
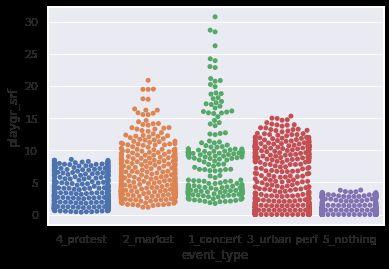
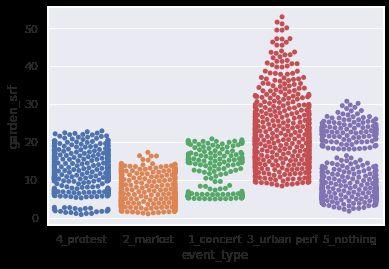
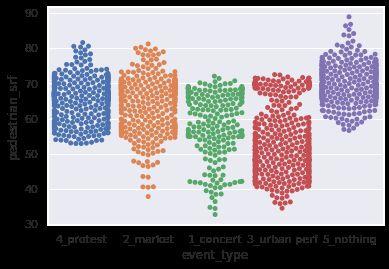
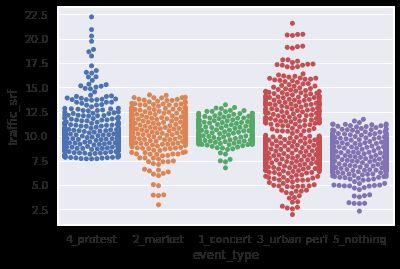
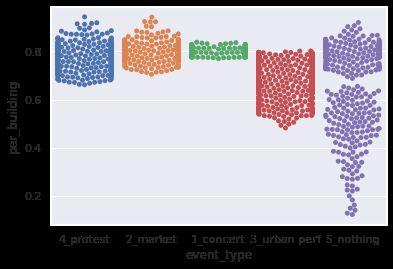
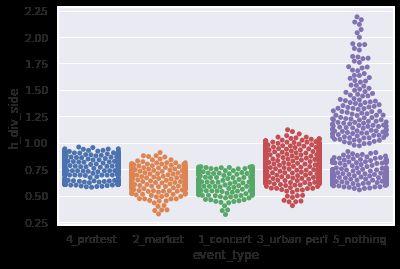
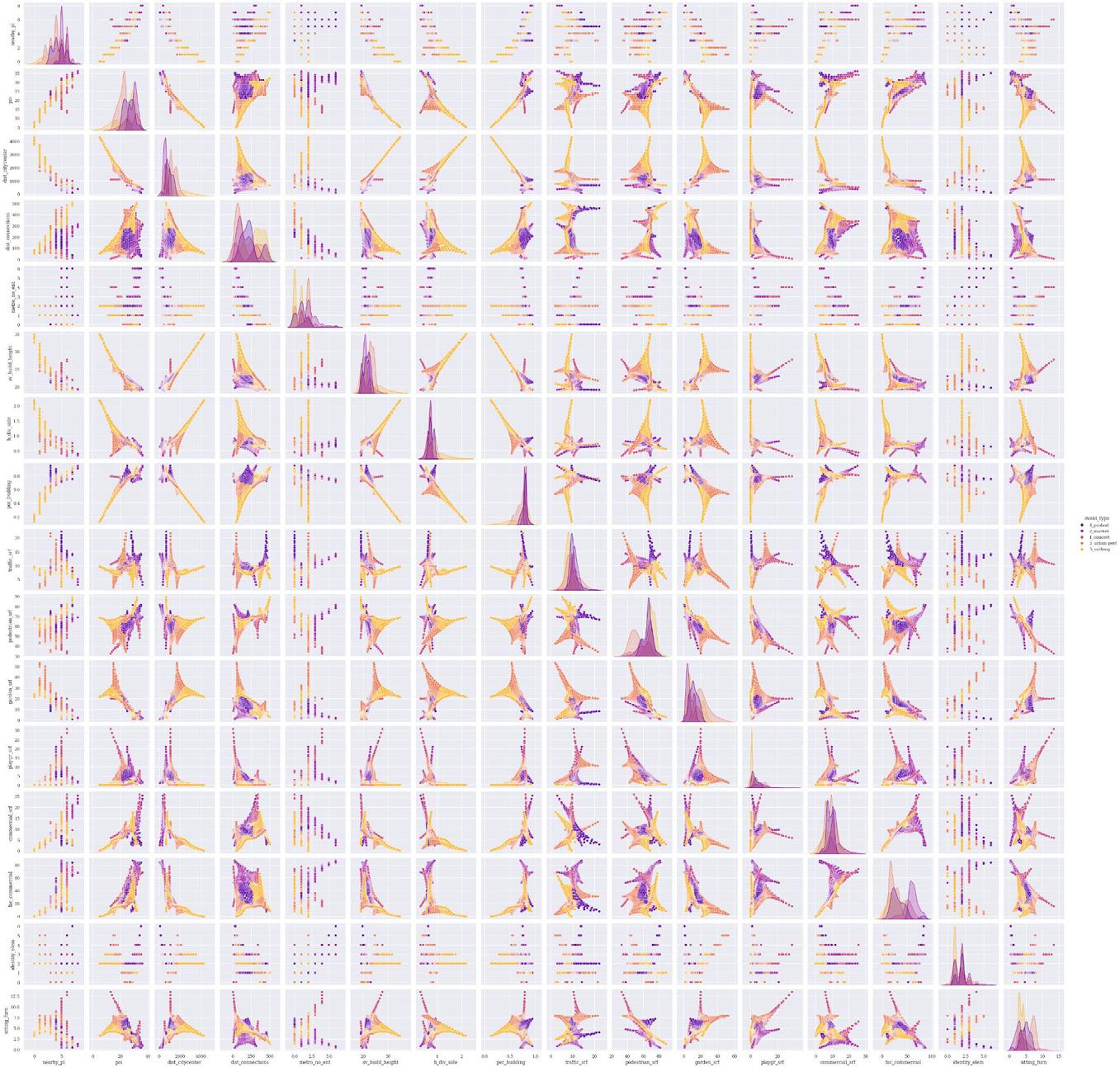
MACHINE LEARNING | EDA
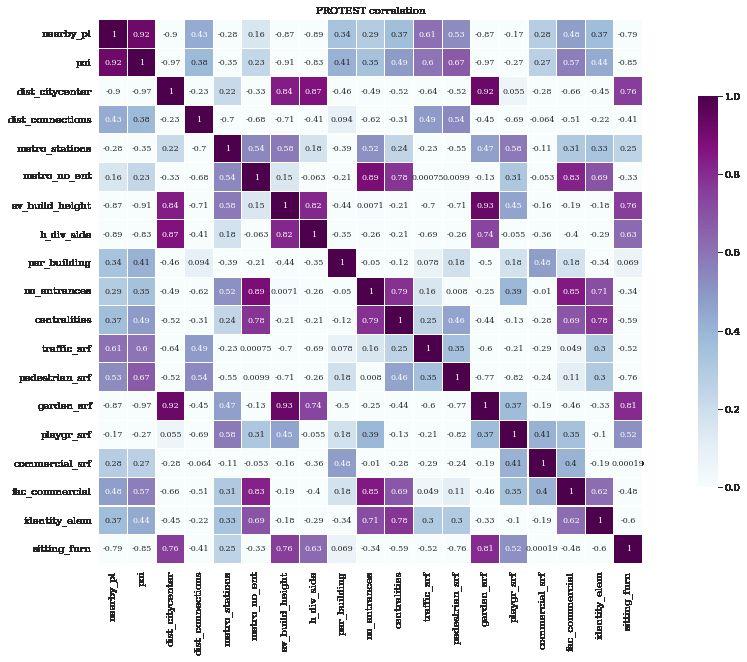
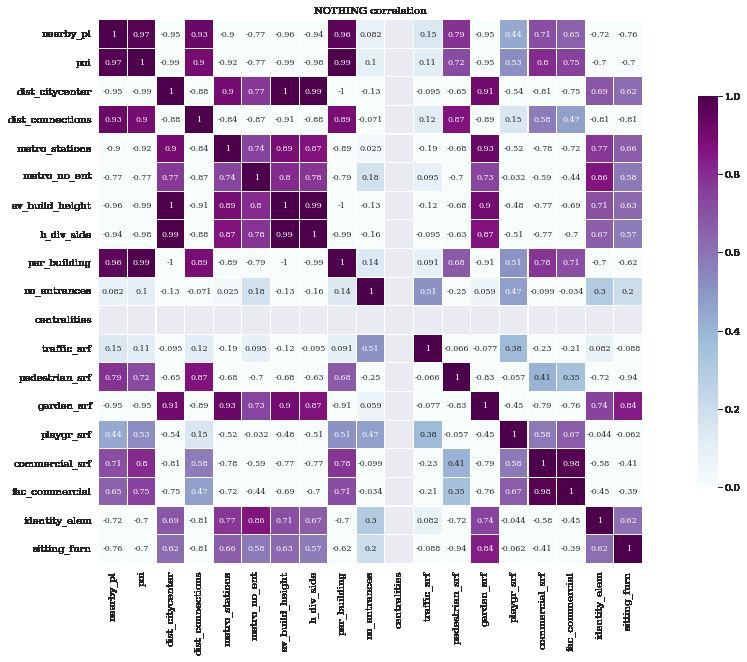
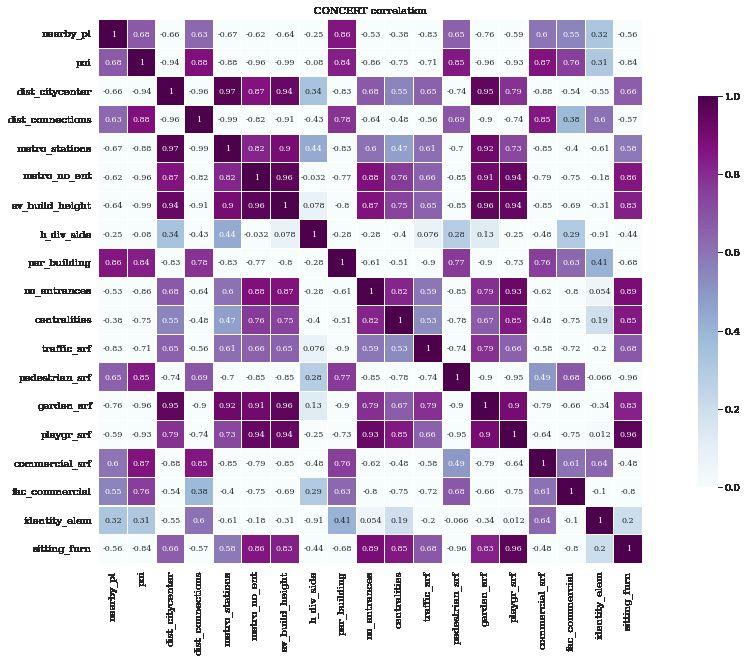
MACHINE LEARNING | CORRELATION HEATMAP
MACHINE LEARNING | CORRELATION HEATMAP
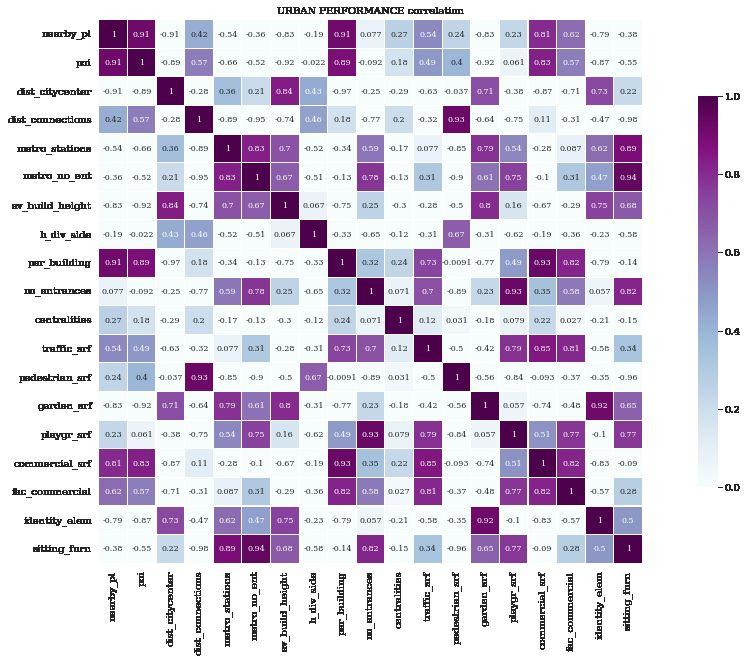
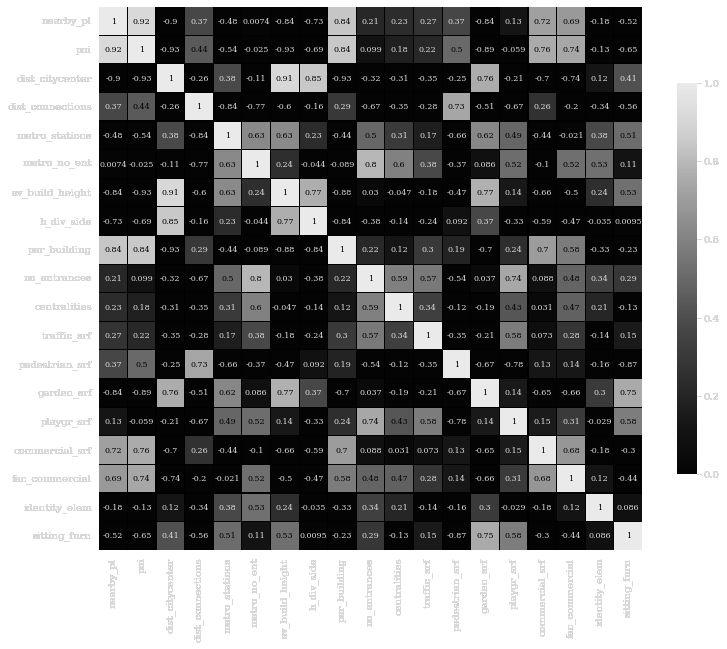
CORRELATION HEATMAP - PEARSON COEFFICIENT
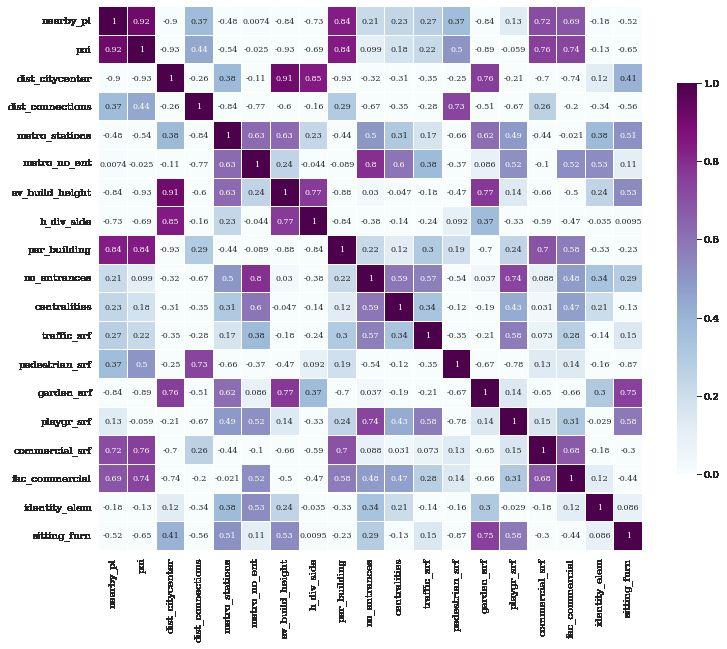
By plotting a correlation matrix we can study the covariance between the features considered for our plazas and, in case of observing a high (direct or indirect) proportional relationship, to analyze if that covariance implies causality or if it is due to the effect of a third variable, such as the type of event. In this case, a high proportionality is observed between the number of nearby squares and the number of POIs
When performing an exclusive heatmap for each type of event, these two columns present covariance for each of the cases, so we can consider reducing one of these parameters to simplify our study model. Some relationship between other pairs of features is observed in the individual analysis per type of event, but they are not considered relevant for the model since this covariance is not observed in the general matrix.
WHAT IS MY PLAZA FOR?
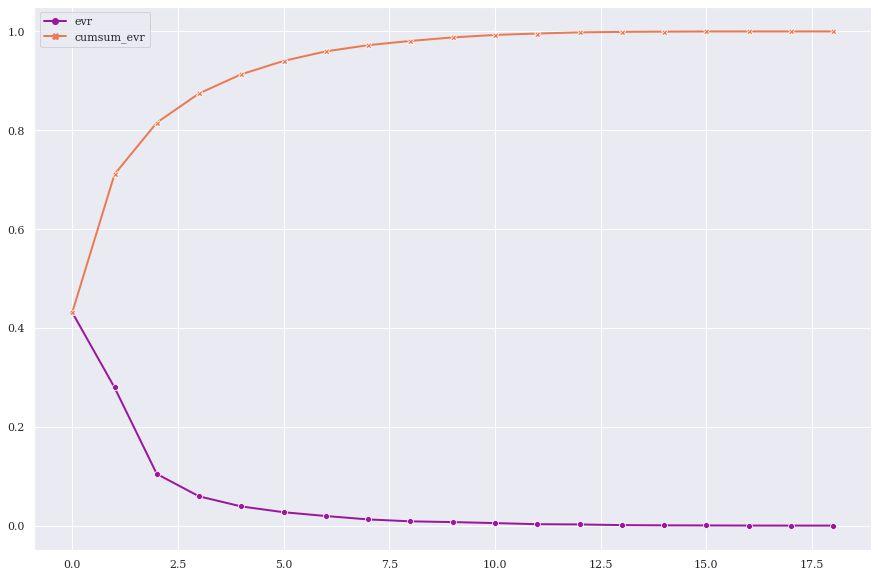
BIPLOT PRINCIPAL COMPONENT
By bi-plotting the results of our first two PCA analysis on a two-dimensional graph it can be determined (as in the subsequent heatmap) that, although some events are more related to certain parameters than others, most of our indicators have a similar relevance in the prediction of our target if we consider all possible events.
In consequence, the first attempts of our classification model will consider all the initial metrics from the dataset.
ANALYSIS
PRINCIPAL COMPONENT HEATMAP
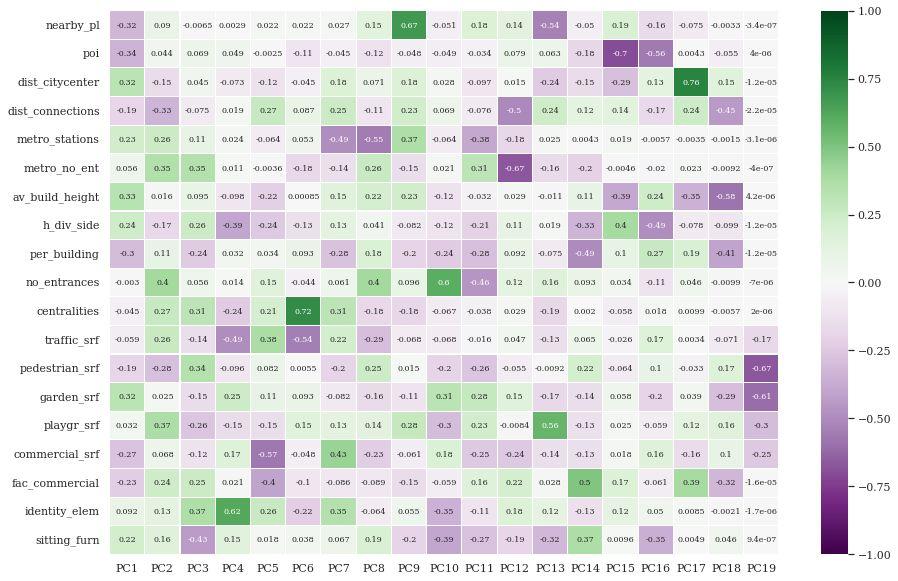
In the relationship matrix between the features and the PCA analysis, we can observe that for the first three iterations none of our parameters stands out as highly determinant for the prediction of our target, which reveals that the definition of our initial metrics includes sufficient variability to the model.
MACHINE LEARNING | BIPLOT PRINCIPAL COMPONENT MACHINE LEARNING | PCA
MACHINE LEARNING | PCA ANALYSIS

PC1 poi
PC2 no_entrances
PC3 sitting_furn
PC4 identity_elem
PC5 commercial_srf
PC6 centralities
PC7 metro_stations
PC8 metro_stations
PC9 nearby_pl
PC10 no_entrances
PC11 no_entrances
PC12 metro_no_ent
PC13 playgr_srf
PC14 fac_commercial
PC15 poi
PC16 poi
PC17 dist_citycenter
PC18 av_build_height
PC19 pedestrian_srf
72% 81% 87% 90% 94% 43%
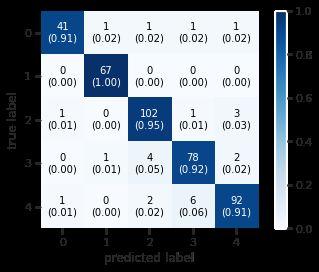
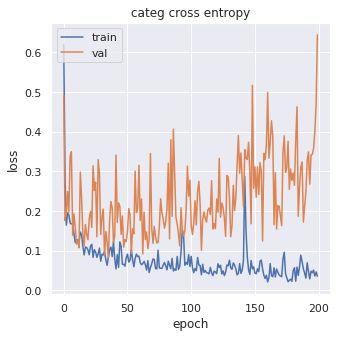
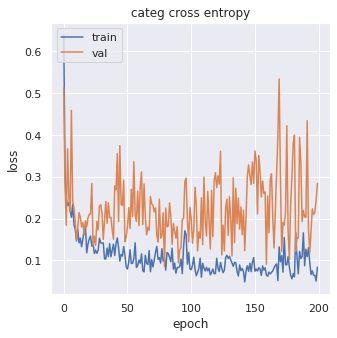
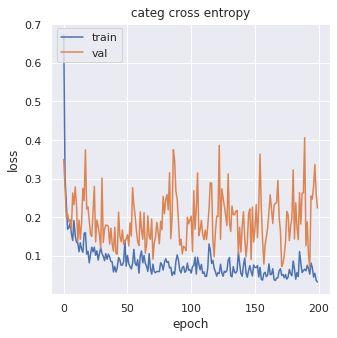
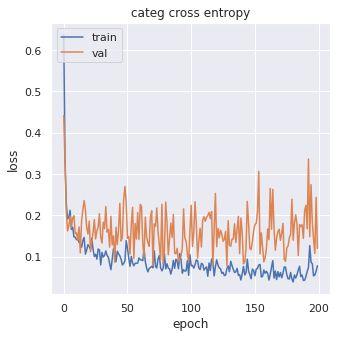
MACHINE LEARNING | SL CLASSIFICATION MODELS LOGISTIC REGRESSION RANDOM FOREST CLASSIFIER Cross_val_score [0.97222222 0.96604938 0.9691358 0.95679012 0.96604938] Score 0.9679012345679012 Cross_val_score [0.93209877 0.91975309 0.9382716 0.91666667 0.93518519] Score 0.9382716049382716 precision recall f1-score support 1_concert 0.95 0.91 0.93 45 2_market 0.97 1.00 0.99 67 3_urban perf 0.94 0.95 0.94 107 4_protest 0.91 0.92 0.91 85 5_nothing 0.94 0.91 0.92 101 accuracy 0.94 405 macro avg 0.94 0.94 0.94 405 weighted avg 0.94 0.94 0.94 405 precision recall 1_concert 0.94 2_market 1.00 3_urban perf 0.98 4_protest 0.95 5_nothing 0.96 accuracy macro avg 0.97 weighted avg 0.97 [TP, FN, FP, TN] [[41, 4, 2, 358], [67, 0, 2, 336], [102, 5, 7, 291], [78, 7, 8, 312], [92, 9, 6, 298]] Architecture: model = Sequential() Dense(64, activation='relu') Dropout(0.1) Dense(64, activation='relu') Dropout(0.1) Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.9654321074485779 Loss: 0.1759 Architecture: model = Sequential() Dense(64, activation='relu') Dense(64, activation='relu') Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.9777777791023254 Loss: 0.2580 Architecture: model = Sequential() Dense(64, activation='relu') Dropout(0.1) Dense(64, activation='relu') Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.960493803024292 Loss: 0.1339 Architecture: model = Sequential() Dense(64, activation='relu') Dense(32, activation='relu') Dropout(0.1) Dense(5, activation="softmax") Accuracy: 0.9629629850387573 Loss: 0.1949 MACHINE LEARNING | ANN CLASSIFICATION MODELS | BATCH SIZE: 32 / EPOCHS: 200 Arch_6-LOWER ACC/HIGHER LOSS Arch_1-OVERFITTING Arch_4-LOWER ACC/HIGHER LOSS Arch_7-LOWER ACC/HIGHER LOSS WHAT IS MY PLAZA FOR?
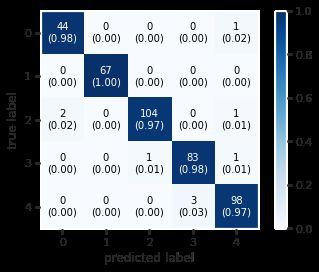
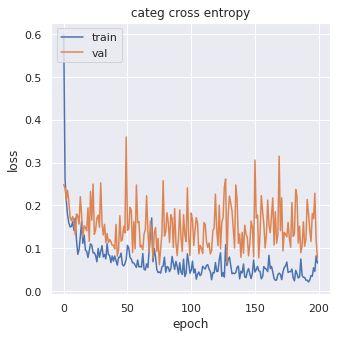
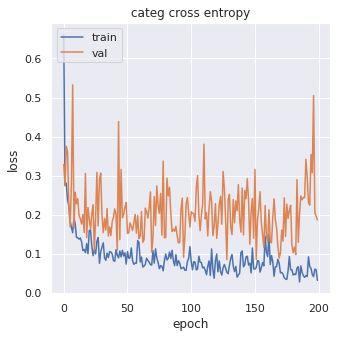
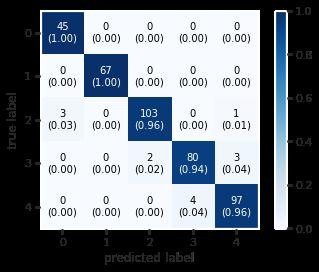
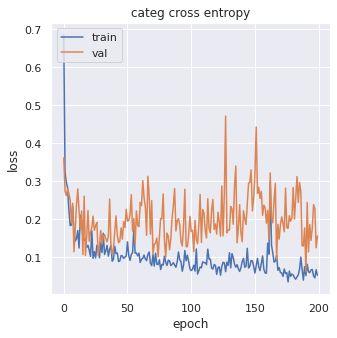
XG BOOST Cross_val_score [0.95987654 0.95987654 0.96296296 0.9537037 0.95061728] Score 0.9777777777777777 recall f1-score support 1.00 0.97 45 1.00 1.00 67 0.96 0.97 107 0.94 0.95 85 0.96 0.96 101 0.97 405 0.97 0.97 405 0.97 0.97 405 precision recall f1-score support 1_concert 0.96 0.98 0.97 45 2_market 1.00 1.00 1.00 67 3_urban perf 0.99 0.97 0.98 107 4_protest 0.97 0.98 0.97 85 5_nothing 0.97 0.97 0.97 101 accuracy 0.98 405 macro avg 0.98 0.98 0.98 405 weighted avg 0.98 0.98 0.98 405 [TP, FN, FP, TN] [[45, 0, 3, 357], [67, 0, 0, 338], [103, 4, 2, 296], [80, 5, 4, 316], [97, 4, 4, 300]] [TP, FN, FP, TN] [[44, 1, 2, 358], [67, 0, 0, 338], [104, 3, 1, 297], [83, 2, 3, 317], [98, 3, 3, 301]] Architecture: model = Sequential() Dense(64, activation='relu') Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.9481481313705444 Loss: 0.1766 Architecture: model = Sequential() Dense(64, activation='relu')) Dropout(0.1) Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.9679012298583984 Loss: 0.1290 Architecture: model = Sequential() Dense(64, activation='relu') Dense(64, activation='relu') Dropout(0.1) Dense(32, activation='relu') Dense(5, activation="softmax") Accuracy: 0.9580246806144714 Loss: 0.2010 Arch_3-HIGHER ACC/LOWER LOSS Arch_2-LOWER ACC/HIGH LOSS Arch_5-LOWER ACC/HIGHER LOSS
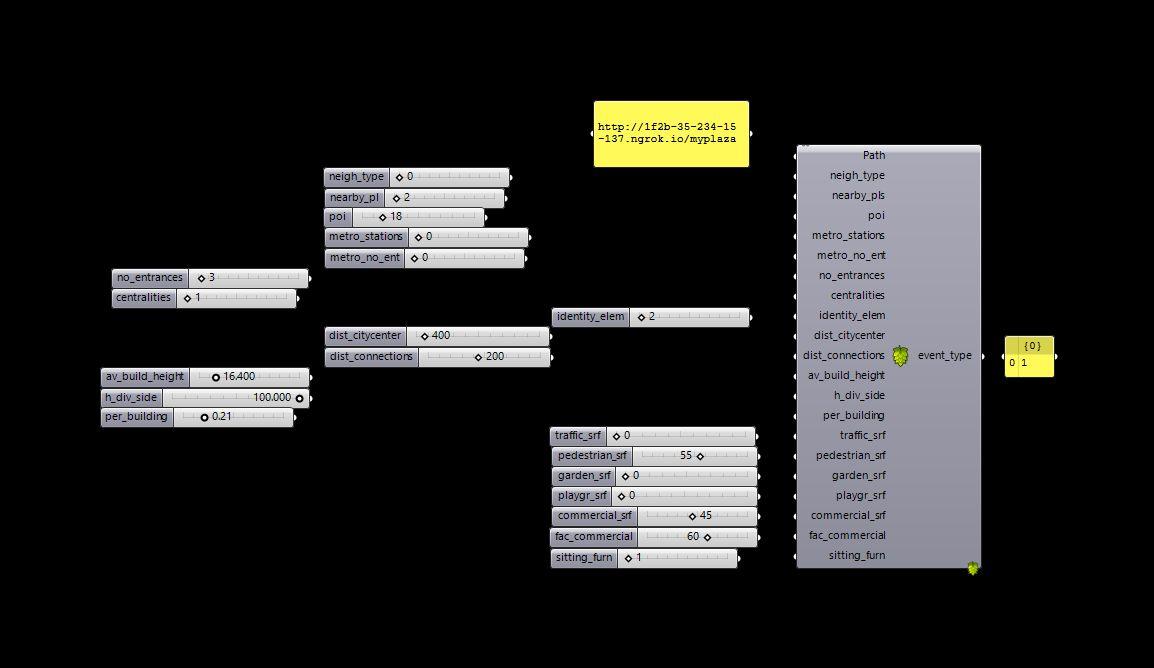
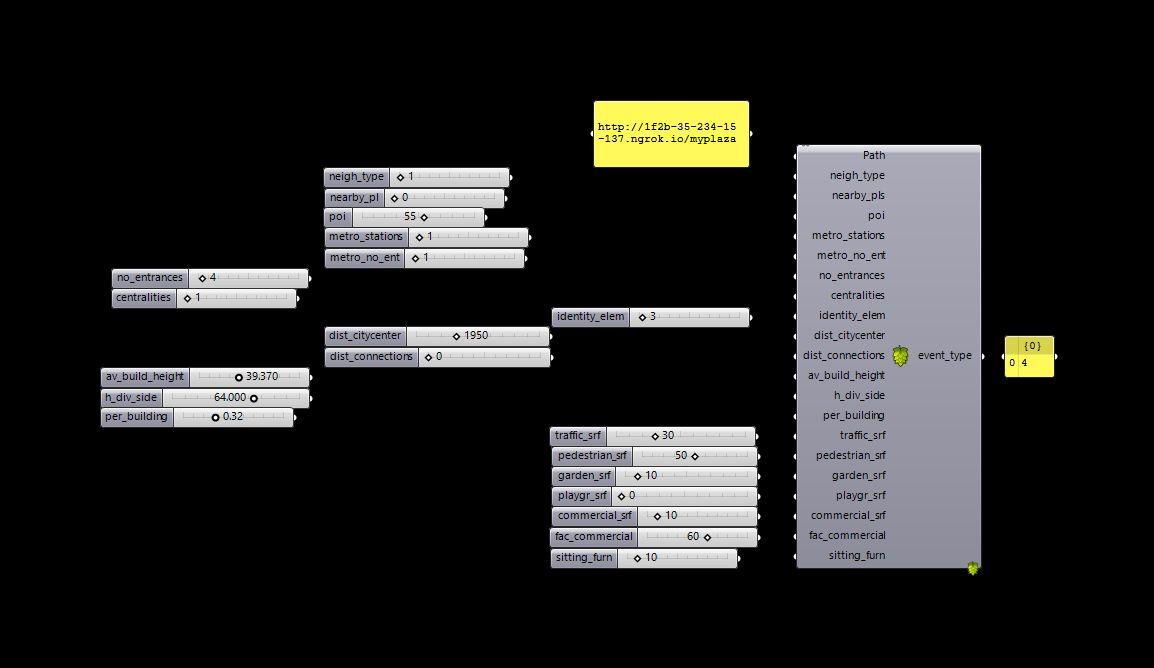
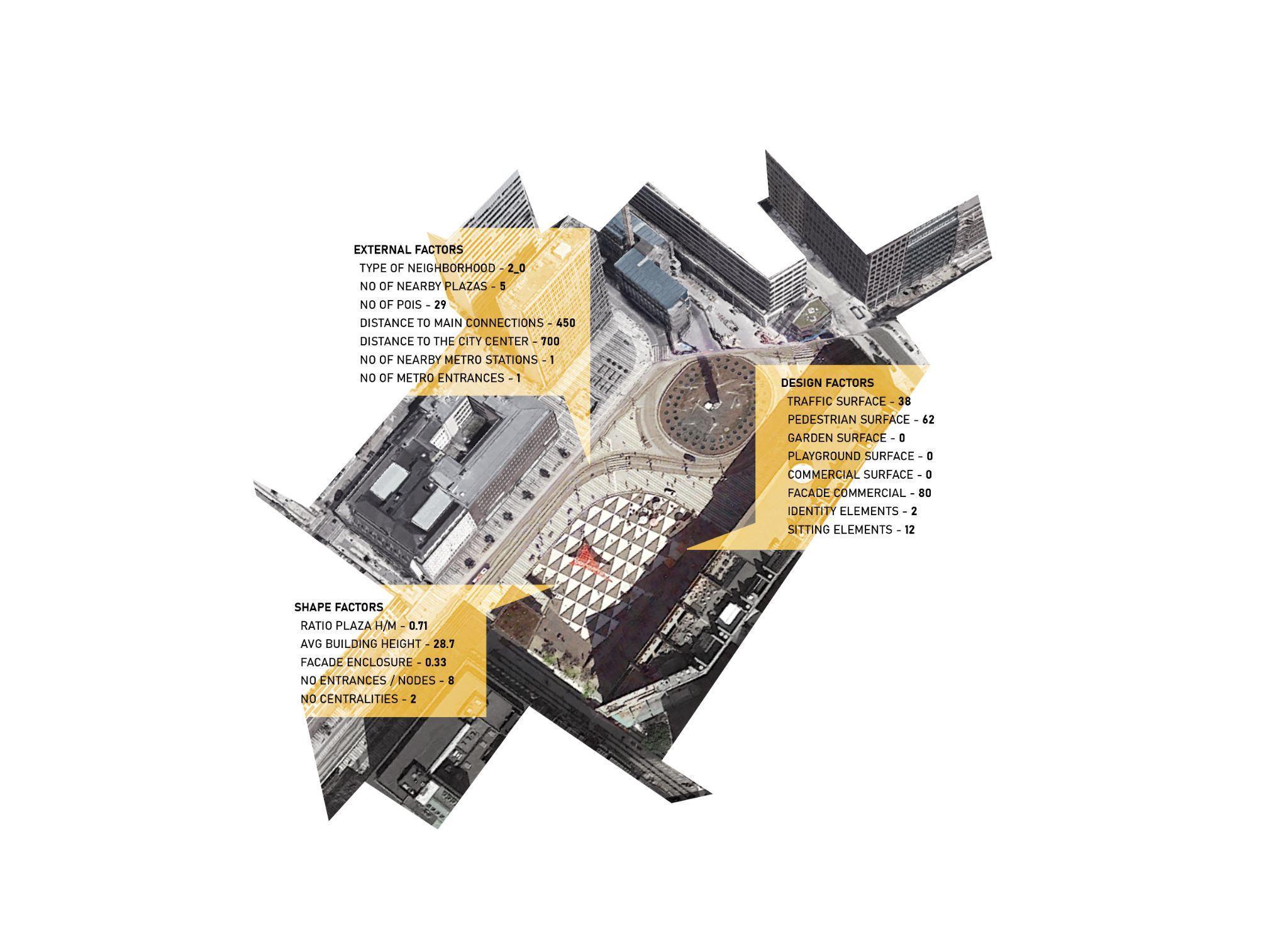
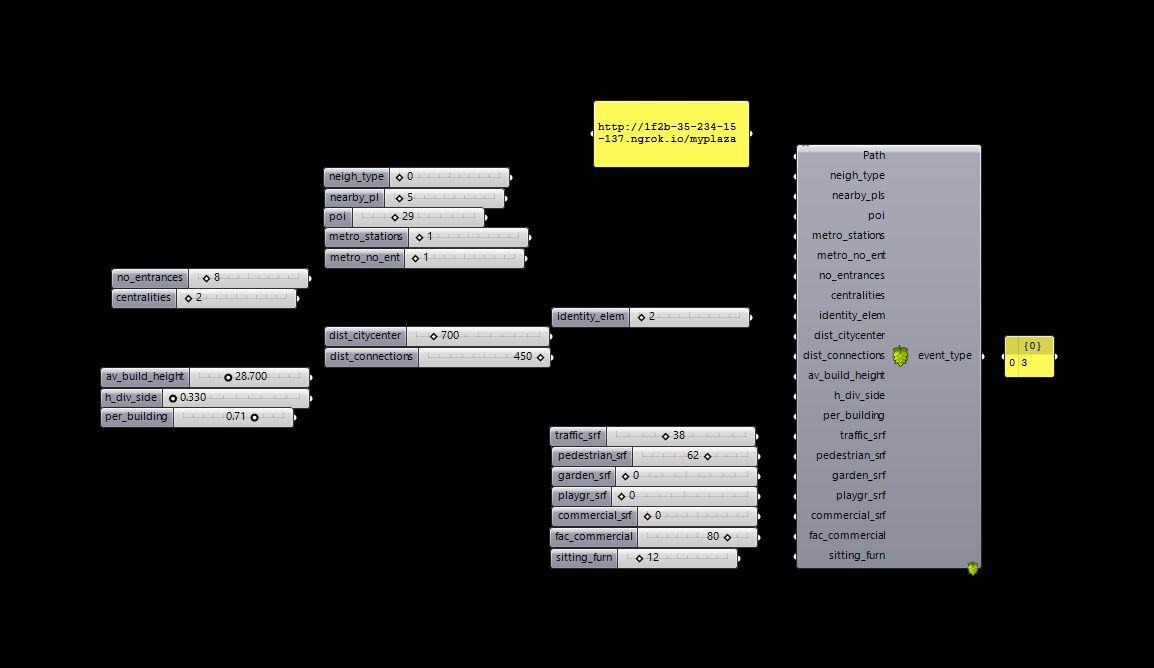
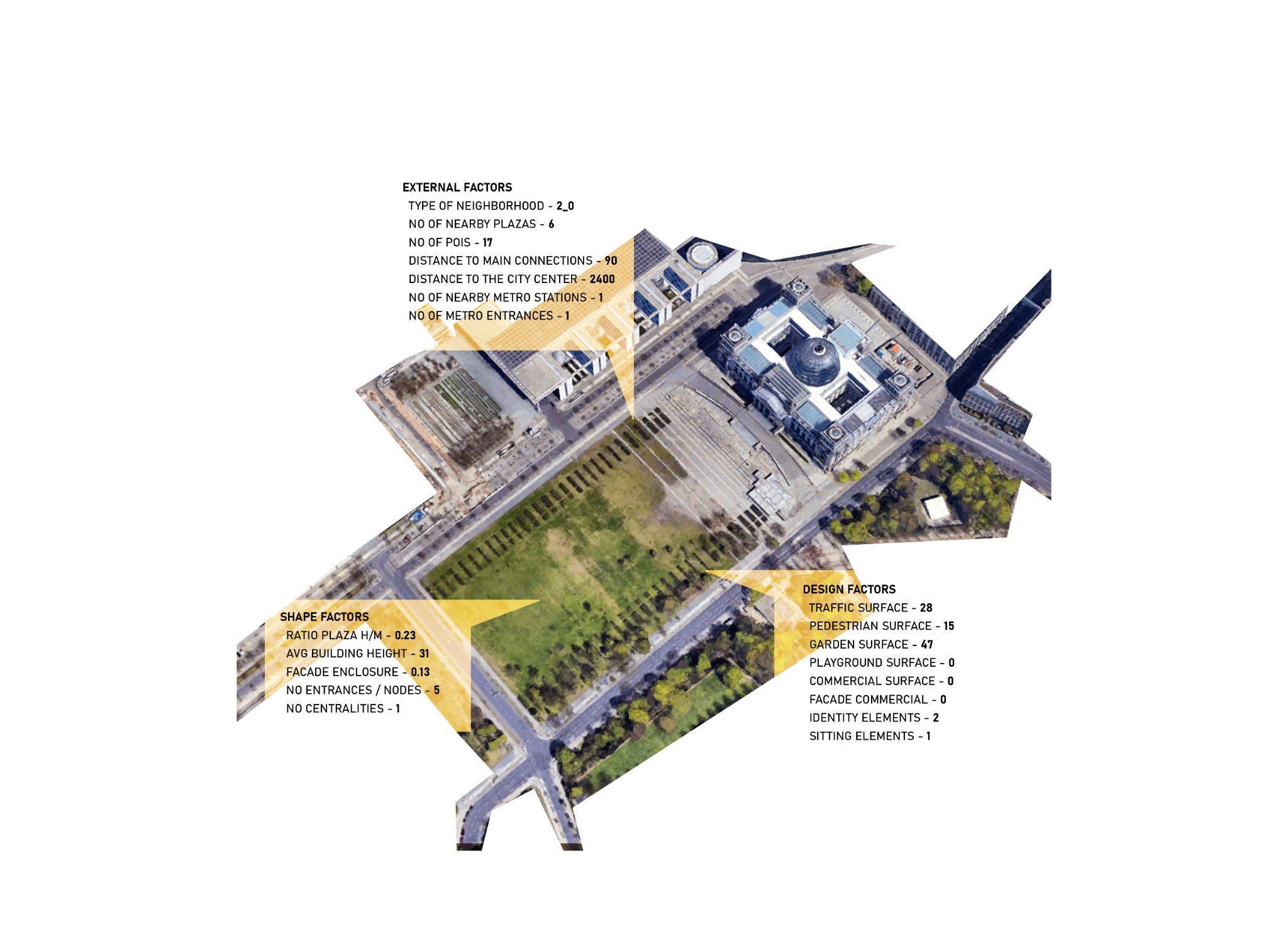
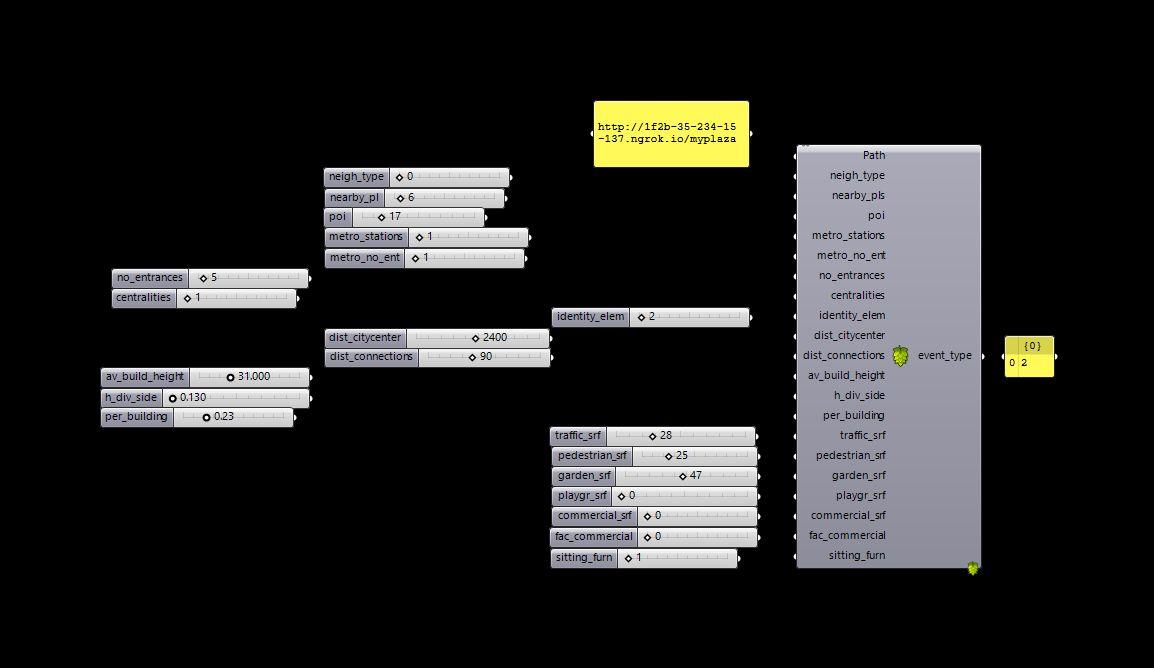
RESULTS EVALUATION | LOCAL ML PREDICTION/HOPS & GH Geometry Verification
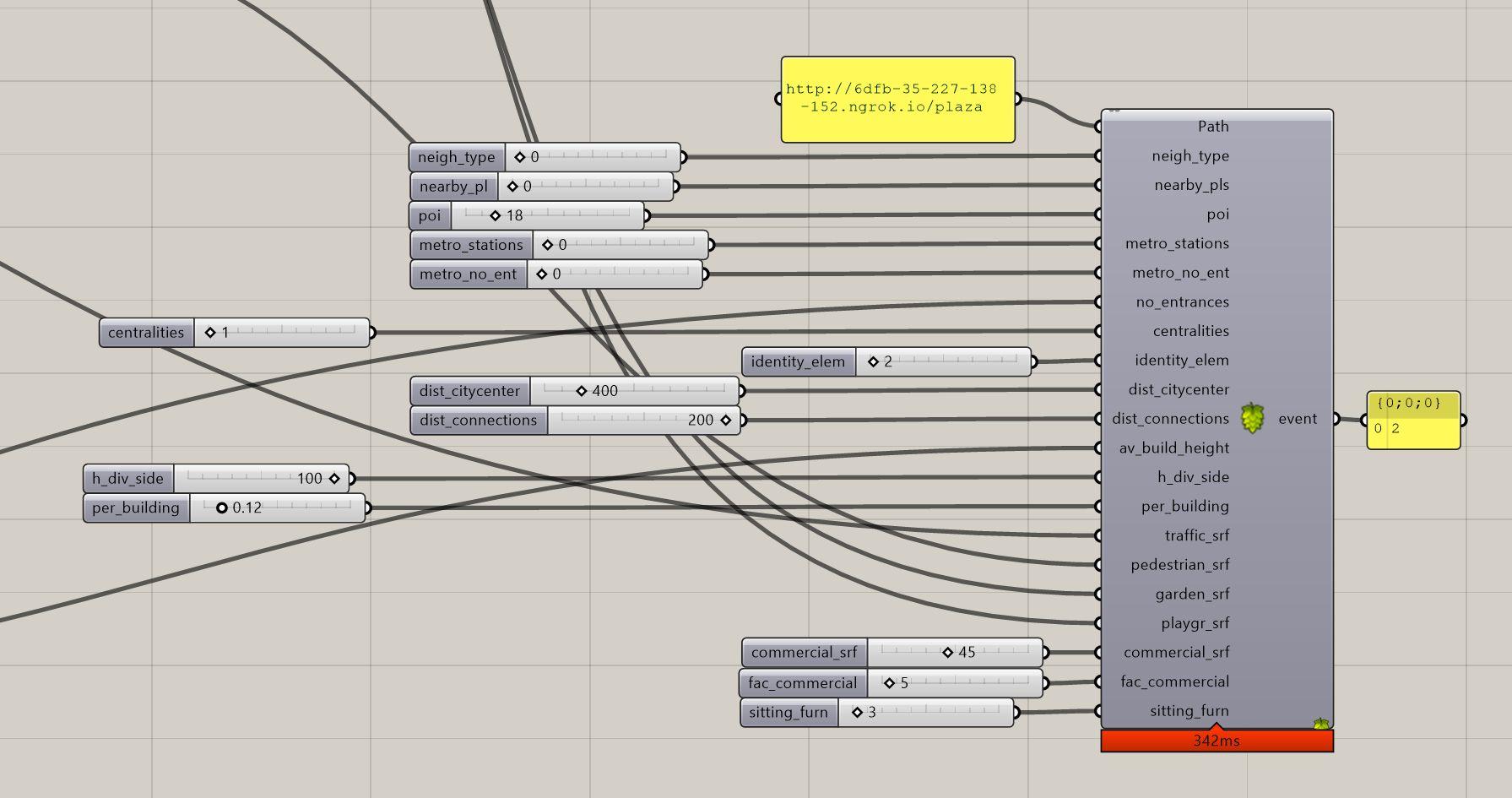
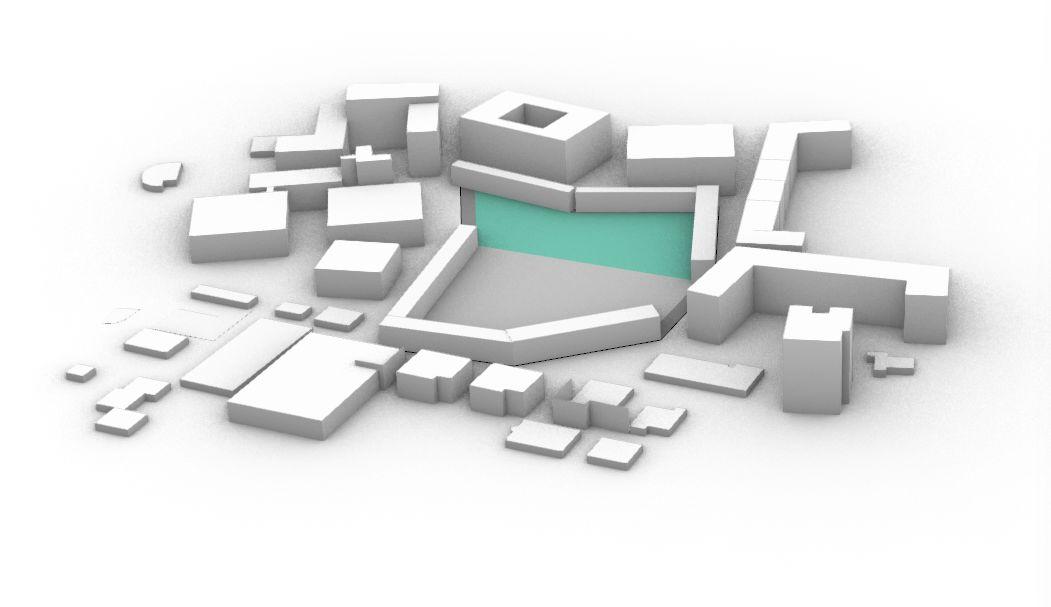
Import the surrounding buildings from OSM Define your Plaza parameters
WHAT IS MY PLAZA FOR?
HOPS Parametric Space ML Prediction
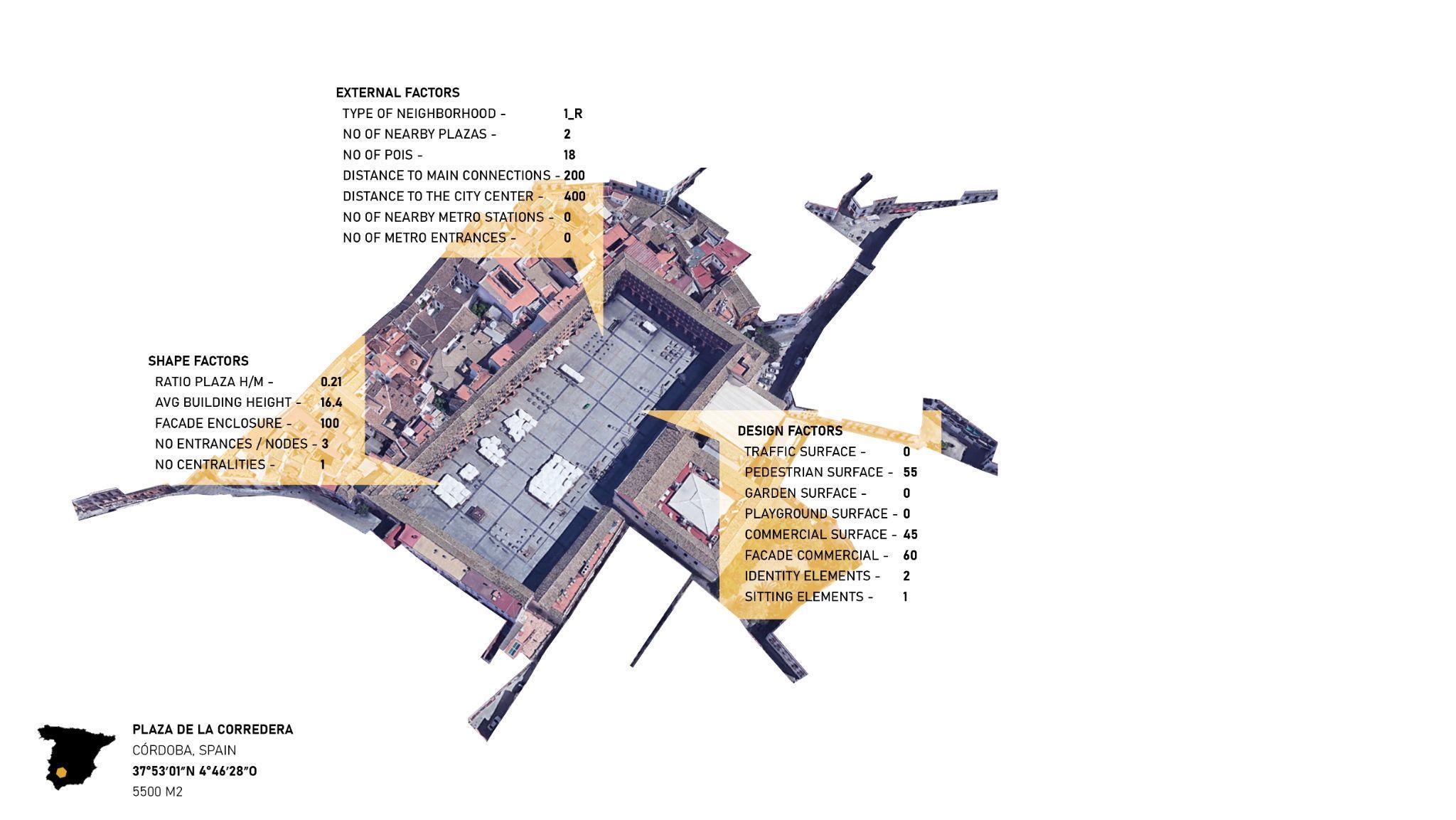

SHAPE PLAZA DE LA CORREDERA CÓRDOBA, SPAIN 37.8836° N, 4.7746° W 5500 m2 WHAT IS MY PLAZA FOR? RESULTS EVALUATION | REAL PLAZAS | CORDOBA
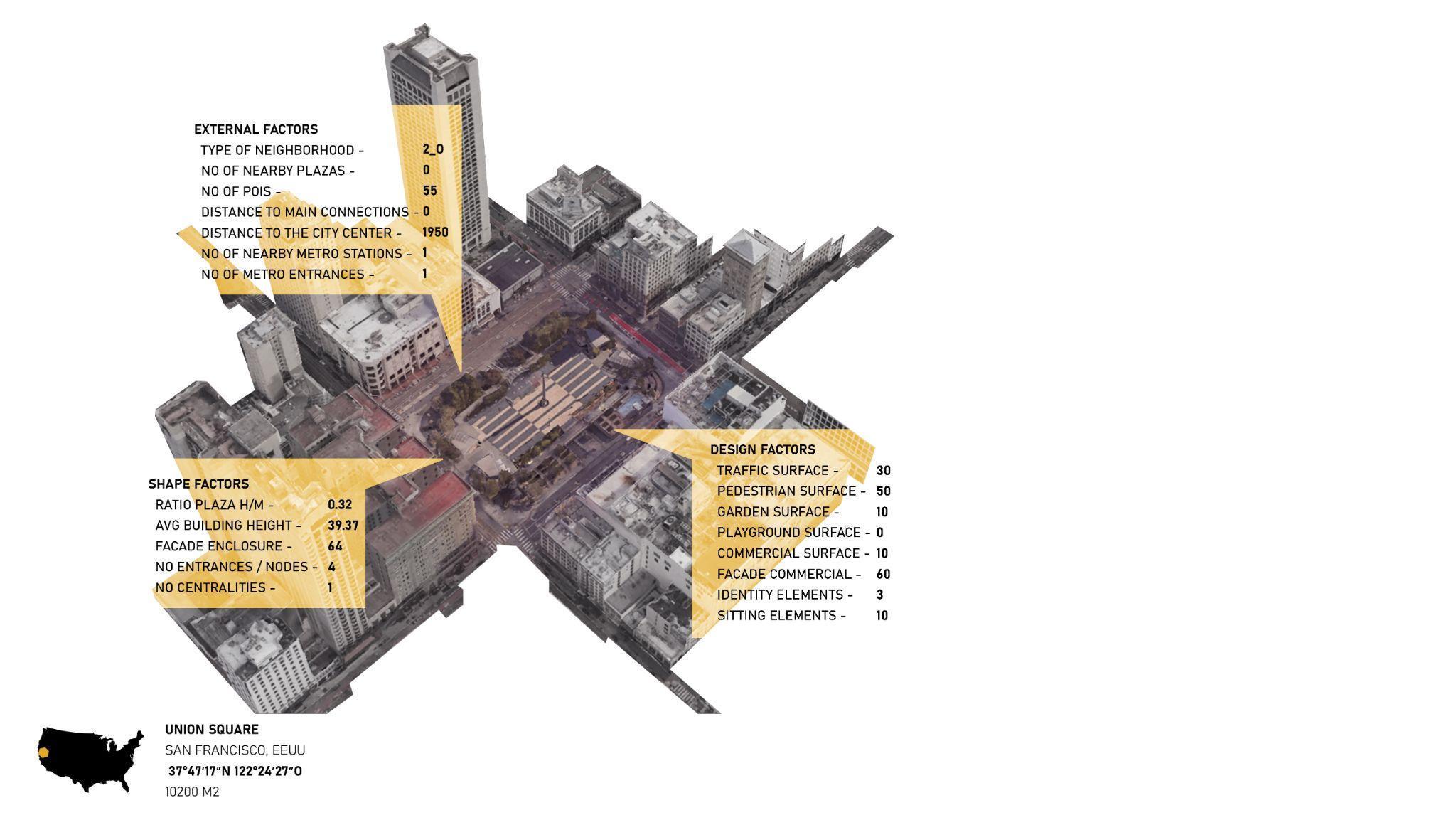


MY Plaza is for Urban Performance SERGELS TORG STOCKHOLM, SWEDEN 59.3324° N, 18.0645° E RESULTS EVALUATION | REAL PLAZAS | SAN FRANCISCO UNION SQUARE SAN FRANCISCO, USA 37.7879° N, 122.4075° W 10200 m2 WHAT IS MY PLAZA FOR? RESULTS EVALUATION | REAL PLAZAS | STOCKHOLM
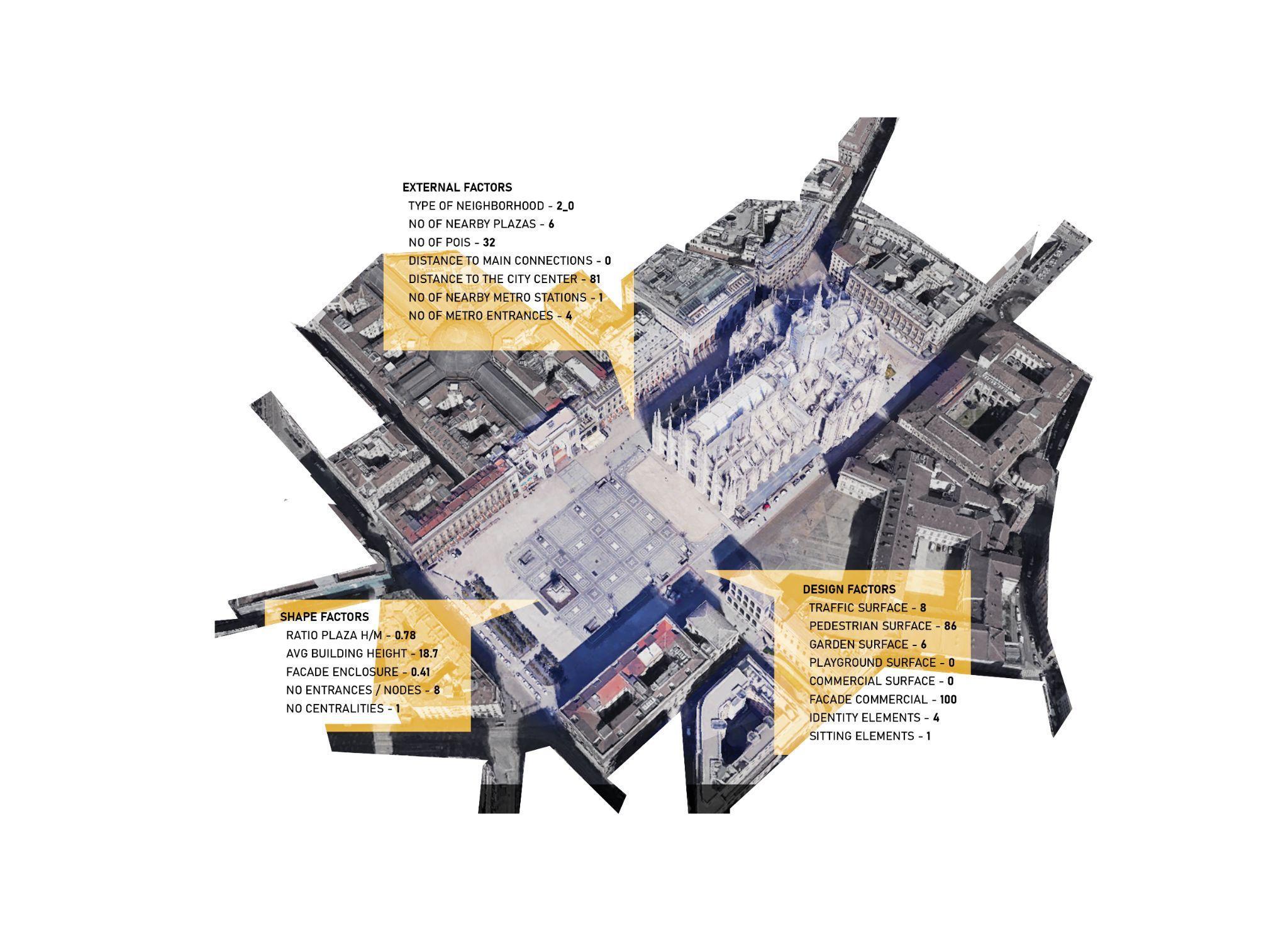

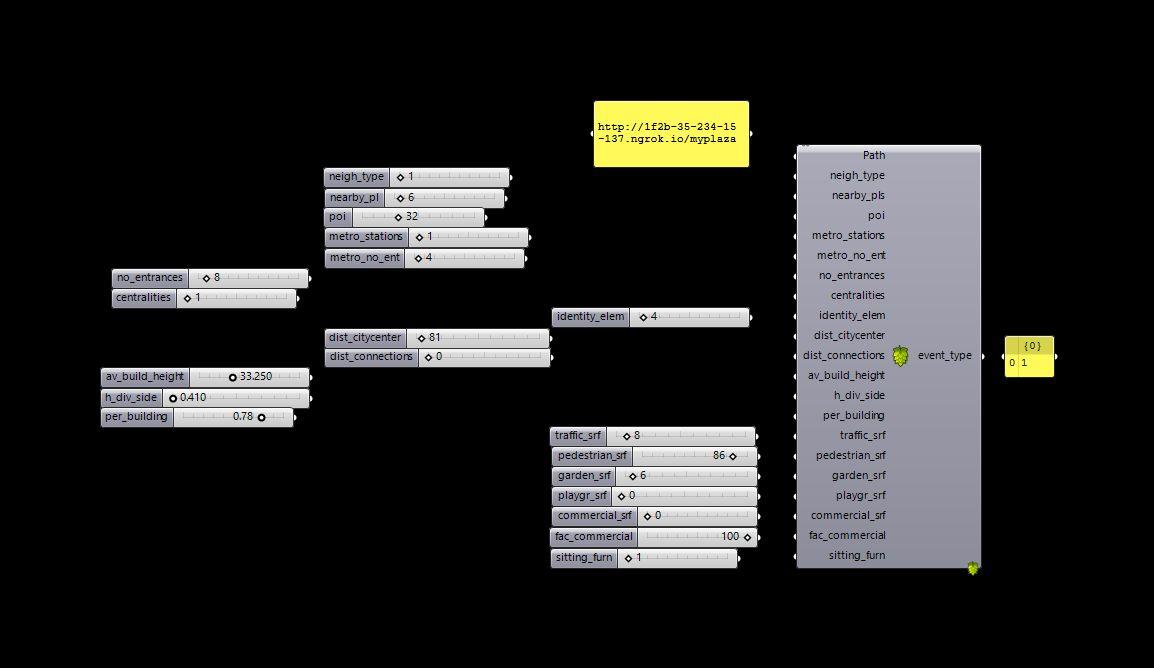

RESULTS EVALUATION | REAL PLAZAS | MILAN MY Plaza is for Concert PIAZZA DEL DUOMO MILAN, ITALY 45.4642° N, 9.1897° E 22265 m2 RESULTS EVALUATION | REAL PLAZAS | BERLIN MY Plaza is for Market PLATZ DER REPUBLIK BERLIN, GERMANY 52.5186° N, 13.3732° E 69812 m2
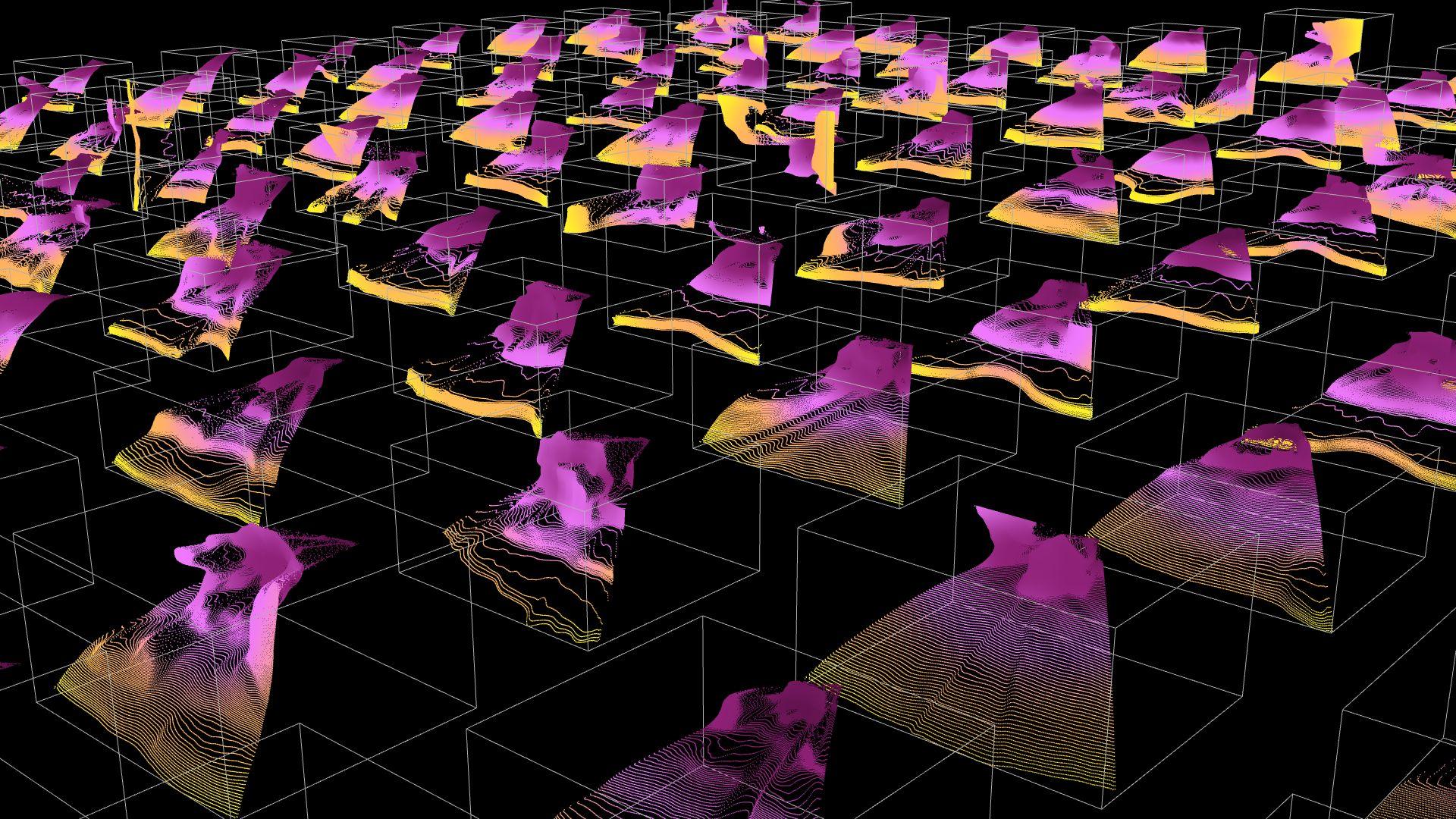
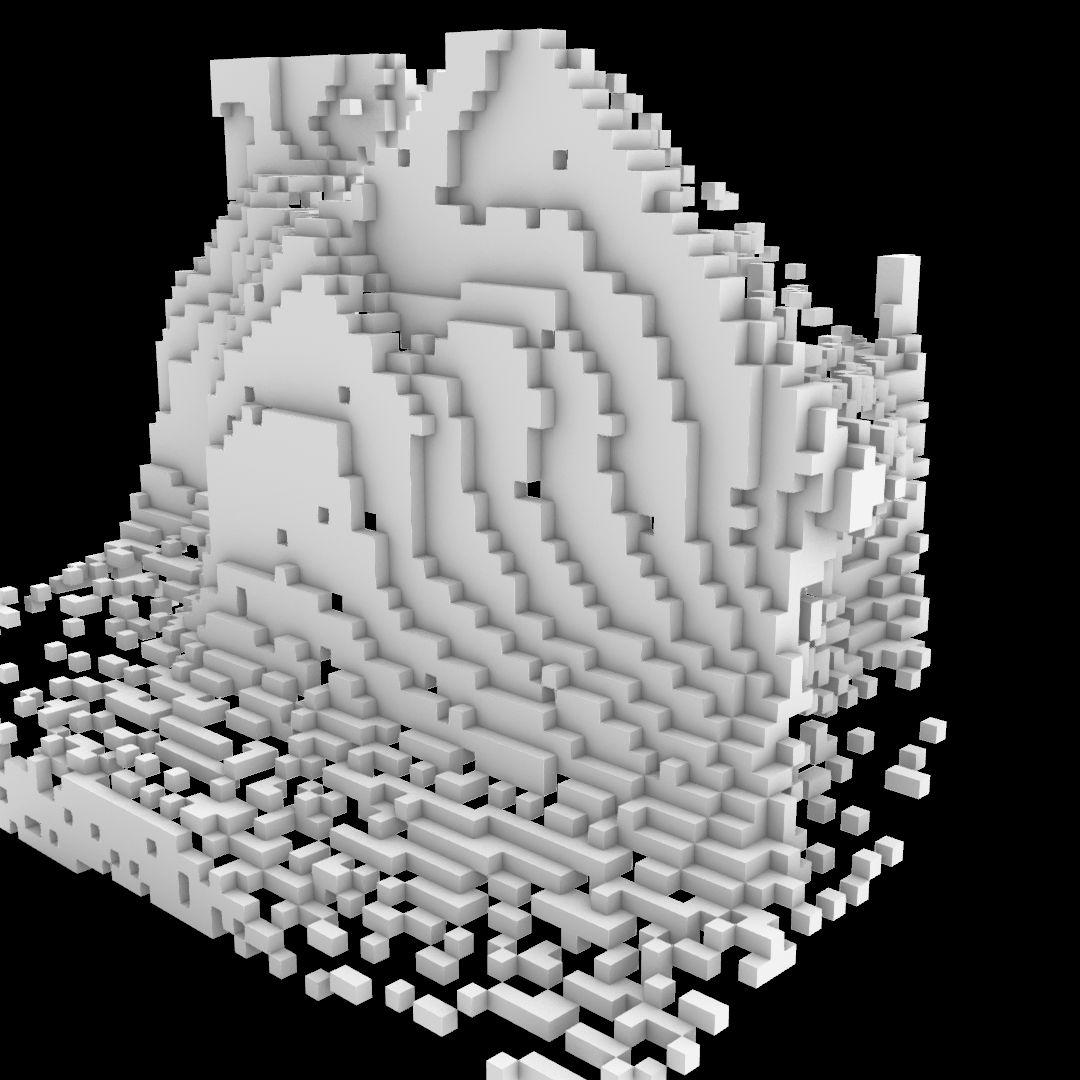
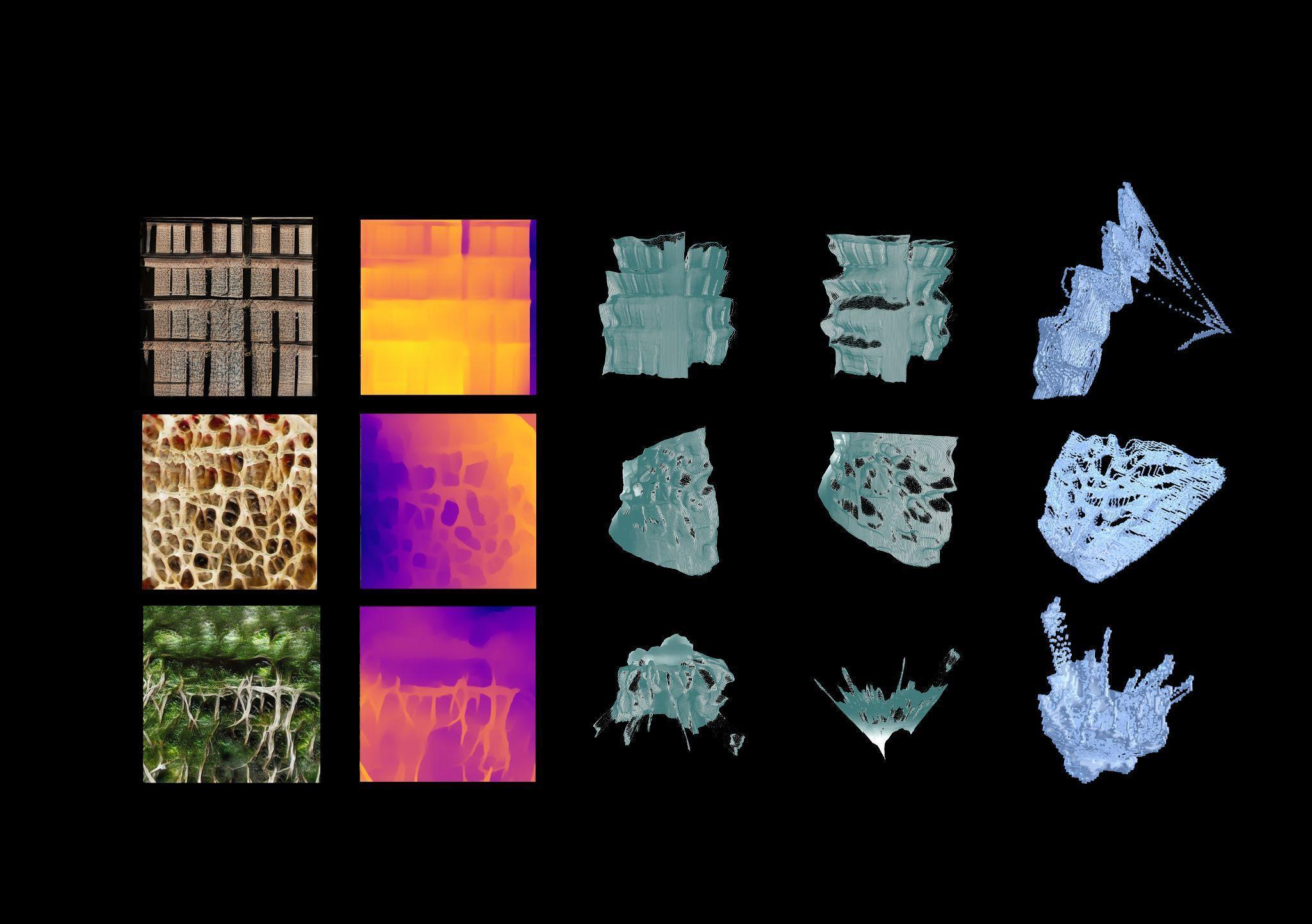
DEPTH CITY
16 Date: 2021 Collaborators: Jumana Hamdani Pablo Antuña Molina Salvador Calgua Instructor: Oana Taut Project Type: Academic at IAAC Tools: Rhino,Grasshopper, Point Cloud, Python, Google Colab, DLT model, MiDaS, PyTorch
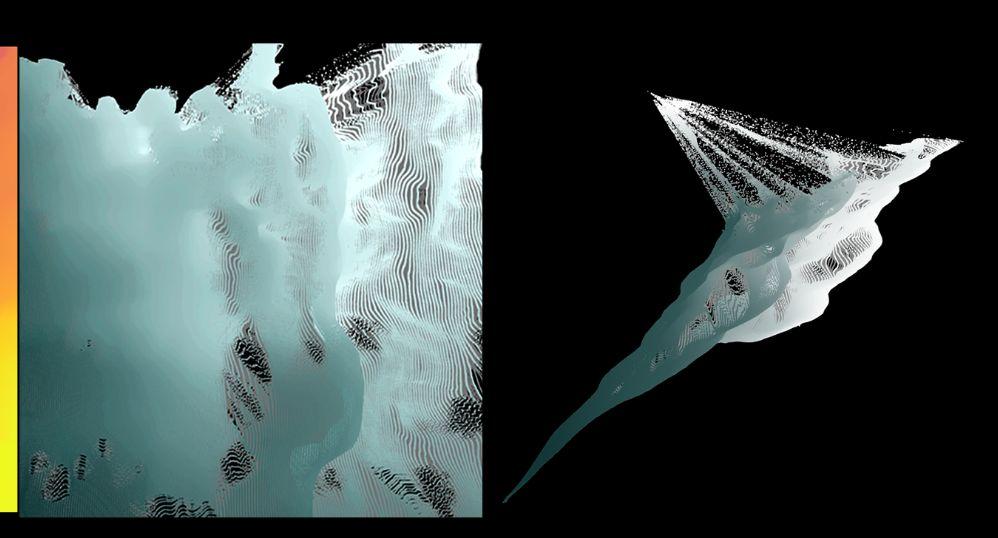
Design Intention
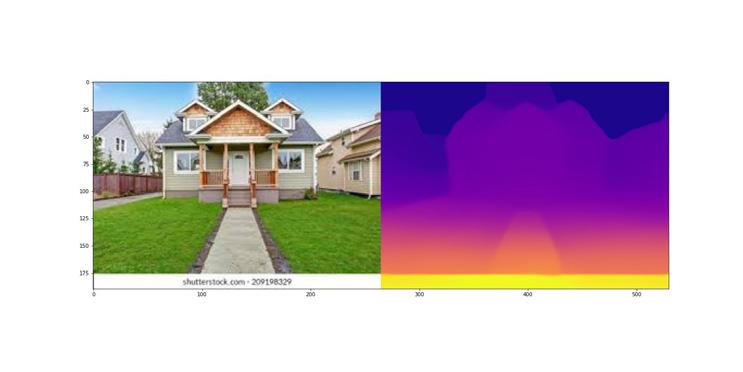
To create 3D space from 2D image
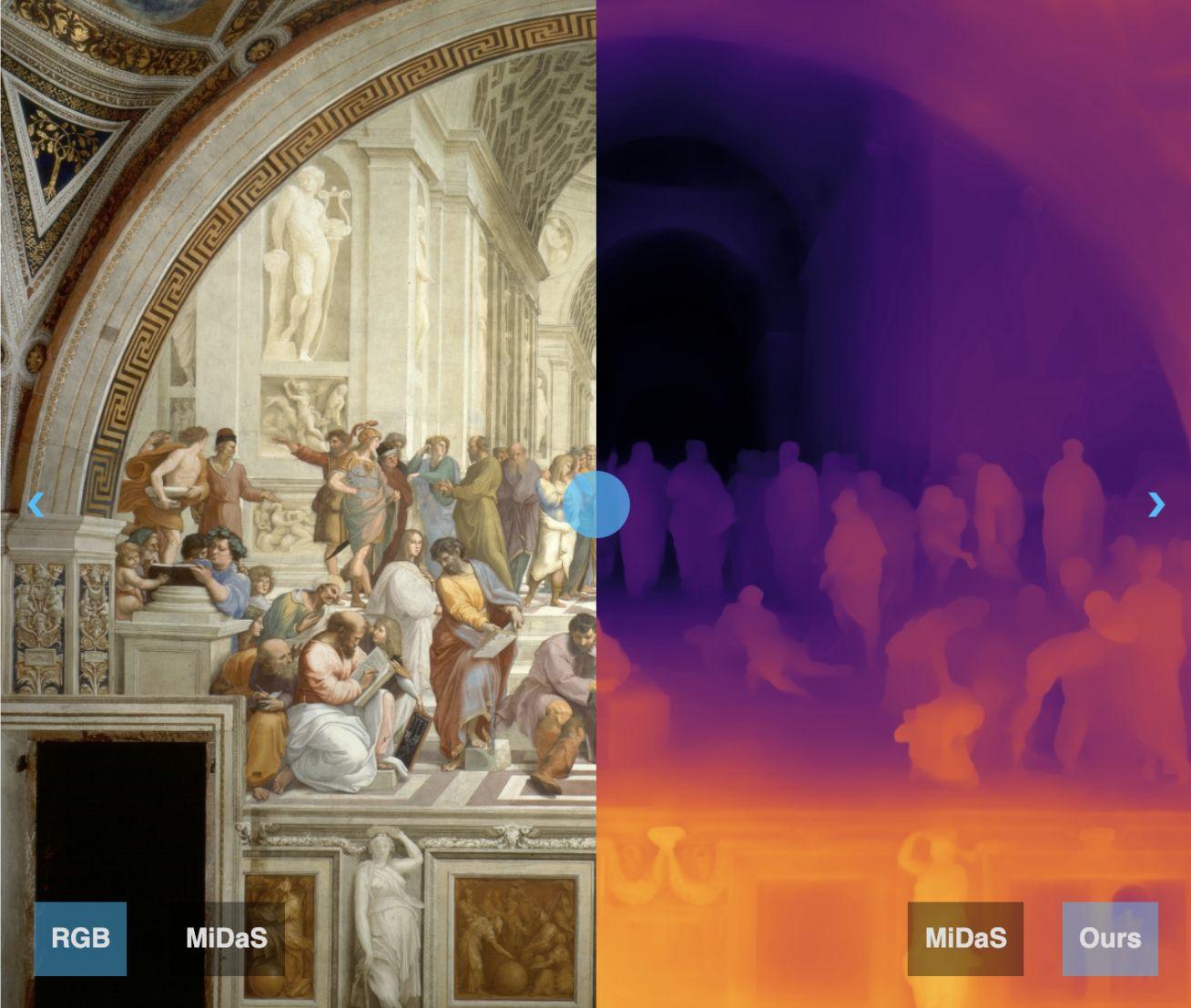
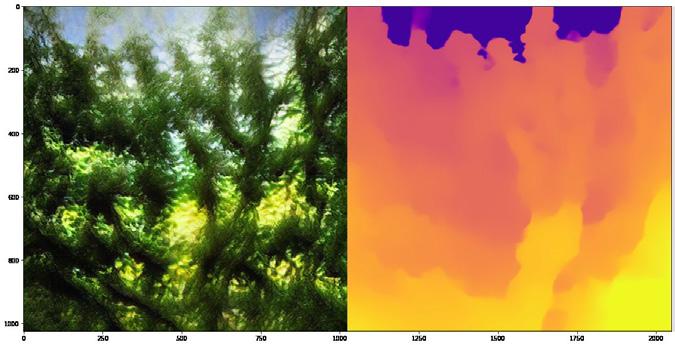
Method: Depth estimation is a crucial step towards inferring scene geometry from 2D images. The goal in monocular depth estimation is to predict the depth value of each pixel or inferring depth information, given only a single RGB image as input.
DEPTH CITY
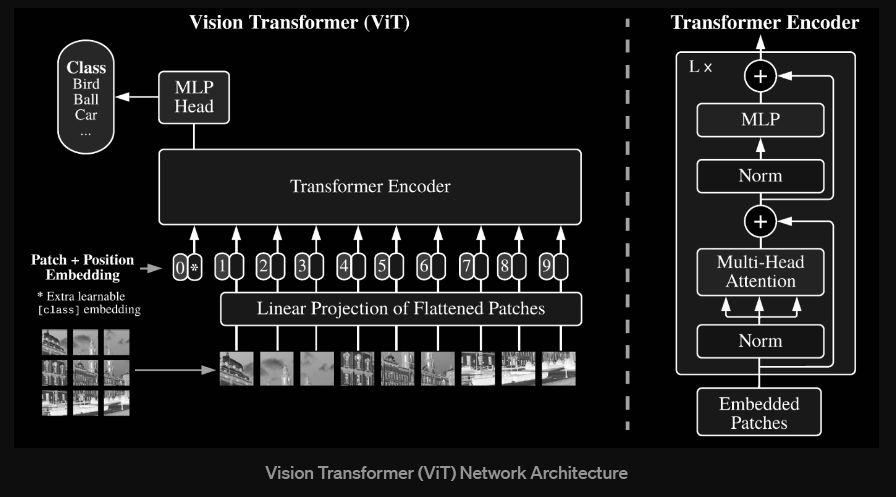
Estimate Depth using DLT model
WORKFLOW Mode Dataset
Various datasets containing depth information are not compatible in terms of scale and bias. This is due to the diversity of measuring tools, including stereo cameras, laser scanners, and light sensors. Midas introduces a new loss function that absorbs these diversities, thereby eliminating compatibility issues and allowing multiple data sets to be used for training simultaneously.

Develop tools that enable mixing diverse datasets to train a general model
[-1, 256, 2, 2] 0 GroupNormAct-144 [-1, 256, 2, 2] 512 StdConv2dSame-145 [-1, 1024, 2, 2] 262,144 Identity-146 [-1, 1024, 2, 2] 0 GroupNormAct-147 [-1, 1024, 2, 2] 2,048 Identity-148 [-1, 1024, 2, 2] 0 ReLU-149 [-1, 1024, 2, 2] 0 Bottleneck-150 [-1, 1024, 2, 2] 0 StdConv2dSame-151 [-1, 256, 2, 2] 262,144 ReLU-152 [-1, 256, 2, 2] 0 GroupNormAct-153 [-1, 256, 2, 2] 512 StdConv2dSame-154 [-1, 256, 2, 2] 589,824 ReLU-155 [-1, 256, 2, 2] 0 GroupNormAct-156 [-1, 256, 2, 2] 512 StdConv2dSame-157 [-1, 1024, 2, 2] 262,144 Identity-158 [-1, 1024, 2, 2] 0 GroupNormAct-159 [-1, 1024, 2, 2] 2,048 Identity-160 [-1, 1024, 2, 2] 0 ReLU-161 [-1, 1024, 2, 2] 0 Bottleneck-162 [-1, 1024, 2, 2] 0 StdConv2dSame-163 [-1, 256, 2, 2] 262,144 ReLU-164 [-1, 256, 2, 2] 0 GroupNormAct-165 [-1, 256, 2, 2] 512 StdConv2dSame-166 [-1, 256, 2, 2] 589,824 ReLU-167 [-1, 256, 2, 2] 0 GroupNormAct-168 [-1, 256, 2, 2] 512 StdConv2dSame-169 [-1, 1024, 2, 2] 262,144 Identity-170 [-1, 1024, 2, 2] 0 GroupNormAct-171 [-1, 1024, 2, 2] 2,048 Identity-172 [-1, 1024, 2, 2] 0 ReLU-173 [-1, 1024, 2, 2] 0 Bottleneck-174 [-1, 1024, 2, 2] 0 StdConv2dSame-175 [-1, 256, 2, 2] 262,144 ReLU-176 [-1, 256, 2, 2] 0 GroupNormAct-177 [-1, 256, 2, 2] 512 StdConv2dSame-178 [-1, 256, 2, 2] 589,824 ReLU-179 [-1, 256, 2, 2] 0 GroupNormAct-180 [-1, 256, 2, 2] 512 StdConv2dSame-181 [-1, 1024, 2, 2] 262,144 Identity-182 [-1, 1024, 2, 2] 0 GroupNormAct-183 [-1, 1024, 2, 2] 2,048 Identity-184 [-1, 1024, 2, 2] 0 ReLU-185 [-1, 1024, 2, 2] 0 Bottleneck-186 [-1, 1024, 2, 2] 0 StdConv2dSame-187 [-1, 256, 2, 2] 262,144 ReLU-188 [-1, 256, 2, 2] 0 GroupNormAct-189 [-1, 256, 2, 2] 512 StdConv2dSame-190 [-1, 256, 2, 2] 589,824 ReLU-191 [-1, 256, 2, 2] 0 GroupNormAct-192 [-1, 256, 2, 2] 512 StdConv2dSame-193 [-1, 1024, 2, 2] 262,144 Identity-194 [-1, 1024, 2, 2] 0 GroupNormAct-195 [-1, 1024, 2, 2] 2,048 Identity-196 [-1, 1024, 2, 2] 0 ReLU-197 [-1, 1024, 2, 2] 0 Bottleneck-198 [-1, 1024, 2, 2] 0 StdConv2dSame-199 [-1, 256, 2, 2] 262,144 ReLU-200 [-1, 256, 2, 2] 0 GroupNormAct-201 [-1, 256, 2, 2] 512 StdConv2dSame-202 [-1, 256, 2, 2] 589,824 ReLU-203 [-1, 256, 2, 2] 0 GroupNormAct-204 [-1, 256, 2, 2] 512 StdConv2dSame-205 [-1, 1024,
Dropout-266 [-1, 5, 768] 0 Mlp-267 [-1, 5, 768] 0 Identity-268 [-1, 5, 768] 0 Block-269 [-1, 5, 768] 0 LayerNorm-270 [-1, 5, 768] 1,536 Linear-271 [-1, 5, 2304] 1,771,776 Dropout-272 [-1, 12, 5, 5] 0 Linear-273 [-1, 5, 768] 590,592 Dropout-274 [-1, 5, 768] 0 Attention-275 [-1, 5, 768] 0 Identity-276 [-1, 5, 768] 0 LayerNorm-277 [-1, 5, 768] 1,536 Linear-278 [-1, 5, 3072] 2,362,368 GELU-279 [-1, 5, 3072] 0 Dropout-280 [-1, 5, 3072] 0 Linear-281 [-1, 5, 768] 2,360,064 Dropout-282 [-1, 5, 768] 0 Mlp-283 [-1, 5, 768] 0 Identity-284 [-1, 5, 768] 0 Block-285 [-1, 5, 768] 0 LayerNorm-286 [-1, 5, 768] 1,536 Linear-287 [-1, 5, 2304] 1,771,776 Dropout-288 [-1, 12, 5, 5] 0 Linear-289 [-1, 5, 768] 590,592 Dropout-290 [-1, 5, 768] 0 Attention-291 [-1, 5, 768] 0 Identity-292 [-1, 5, 768] 0 LayerNorm-293 [-1, 5, 768] 1,536 Linear-294 [-1, 5, 3072] 2,362,368 GELU-295 [-1, 5, 3072] 0 Dropout-296 [-1, 5, 3072] 0 Linear-297 [-1, 5, 768] 2,360,064 Dropout-298 [-1, 5, 768] 0 Mlp-299 [-1, 5, 768] 0 Identity-300 [-1, 5, 768] 0 Block-301 [-1, 5, 768] 0 LayerNorm-302 [-1, 5, 768] 1,536 Linear-303 [-1, 5, 2304] 1,771,776 Dropout-304 [-1, 12, 5, 5] 0 Linear-305 [-1, 5, 768] 590,592 Dropout-306 [-1, 5, 768] 0 Attention-307 [-1, 5, 768] 0 Identity-308 [-1, 5, 768] 0 LayerNorm-309 [-1, 5, 768] 1,536 Linear-310 [-1, 5, 3072] 2,362,368 GELU-311 [-1, 5, 3072] 0 Dropout-312 [-1, 5, 3072] 0 Linear-313 [-1, 5, 768] 2,360,064 Dropout-314 [-1, 5, 768] 0 Mlp-315 [-1, 5, 768] 0 Identity-316 [-1, 5, 768] 0 Block-317 [-1, 5, 768] 0 LayerNorm-318 [-1, 5, 768] 1,536 Linear-319 [-1, 5, 2304] 1,771,776 Dropout-320 [-1, 12, 5, 5] 0 Linear-321 [-1, 5, 768] 590,592 Dropout-322 [-1, 5, 768] 0 Attention-323 [-1, 5, 768] 0 Identity-324 [-1, 5, 768] 0 LayerNorm-325 [-1, 5, 768] 1,536 Linear-326 [-1, 5, 3072] 2,362,368 GELU-327 [-1, 5, 3072] 0 Dropout-328 [-1, 5, 3072] 0 Linear-329 [-1, 5, 768] 2,360,064 Dropout-330 [-1, 5, 768] 0 Mlp-331 [-1, 5, 768] 0 Identity-332 [-1, 5, 768] 0 Block-333 [-1, 5, 768] 0 LayerNorm-334 [-1, 5, 768] 1,536 Linear-335 [-1, 5, 2304] 1,771,776 Dropout-336 [-1, 12, 5, 5] 0 Linear-337 [-1, 5, 768] 590,592 Dropout-338 [-1, 5, 768] 0 Attention-339 [-1, 5, 768] 0 Identity-340 [-1, 5, 768] 0 LayerNorm-341 [-1, 5, 768] 1,536 Linear-342 [-1, 5, 3072] 2,362,368 GELU-343 [-1, 5, 3072] 0 Dropout-344 [-1, 5, 3072] 0 Linear-345 [-1, 5, 768] 2,360,064 Dropout-346 [-1, 5, 768] 0 Mlp-347 [-1, 5, 768] 0 Identity-348 [-1, 5, 768] 0 Block-349 [-1, 5, 768] 0 LayerNorm-350 [-1, 5, 768] 1,536 Linear-351 [-1, 5, 2304] 1,771,776 Dropout-352 [-1, 12, 5, 5] 0 Linear-353 [-1, 5, 768] 590,592 Dropout-354 [-1, 5, 768] 0 Attention-355 [-1, 5, 768] 0 Identity-356 [-1, 5, 768] 0 LayerNorm-357 [-1, 5, 768] 1,536 Linear-358 [-1, 5, 3072] 2,362,368 GELU-359 [-1, 5, 3072] 0 Dropout-360 [-1, 5, 3072] 0 Linear-361 [-1, 5, 768] 2,360,064 Dropout-362 [-1, 5, 768] 0 Mlp-363 [-1, 5, 768] 0 Identity-364 [-1, 5, 768] 0 Block-365 [-1, 5, 768] 0 LayerNorm-366 [-1, 5, 768] 1,536 Linear-367 [-1, 5, 2304] 1,771,776 Dropout-368 [-1, 12, 5, 5] 0 Linear-369 [-1, 5, 768] 590,592 Dropout-370 [-1, 5, 768] 0 Attention-371
768] 2,360,064 Dropout-410 [-1, 5, 768] 0 Mlp-411 [-1, 5, 768] 0 Identity-412 [-1, 5, 768] 0 Block-413 [-1, 5, 768] 0 LayerNorm-414 [-1, 5, 768] 1,536 Identity-415 [-1, 256, 8, 8] 0 Identity-416 [-1, 256, 8, 8] 0 Identity-417 [-1, 512, 4, 4] 0 Identity-418 [-1, 512, 4, 4] 0 Linear-419 [-1, 4, 768] 1,180,416 GELU-420 [-1, 4, 768] 0 ProjectReadout-421 [-1, 4, 768] 0 Transpose-422 [-1, 768, 4] 0 Linear-423 [-1, 4, 768] 1,180,416 GELU-424 [-1, 4, 768] 0 ProjectReadout-425 [-1, 4, 768] 0 Transpose-426 [-1, 768, 4] 0 Conv2d-427 [-1, 768, 2, 2] 590,592 Conv2d-428 [-1, 768, 2, 2] 590,592 Conv2d-429 [-1, 768, 1, 1] 5,309,184 Conv2d-430 [-1, 256, 8, 8] 589,824 Conv2d-431 [-1, 256, 4, 4] 1,179,648 Conv2d-432 [-1, 256, 2, 2] 1,769,472 Conv2d-433 [-1, 256, 1, 1] 1,769,472 ReLU-434 [-1, 256, 1, 1] 0 ReLU-435 [-1, 256, 1, 1] 0 Conv2d-436 [-1, 256, 1, 1] 590,080 ReLU-437 [-1, 256, 1, 1] 0 ReLU-438 [-1, 256, 1, 1] 0 Conv2d-439 [-1, 256, 1, 1] 590,080 Identity-440 [-1, 256, 1, 1] 0 ResidualConvUnit_custom-441 [-1, 256, 1, 1] 0 Conv2d-442 [-1, 256, 2, 2] 65,792 FeatureFusionBlock_custom-443 [-1, 256, 2, 2] 0 ReLU-444 [-1, 256, 2, 2] 0 ReLU-445 [-1, 256, 2, 2] 0 Conv2d-446 [-1, 256, 2, 2] 590,080 ReLU-447 [-1, 256, 2, 2] 0 ReLU-448 [-1, 256, 2, 2] 0 Conv2d-449 [-1, 256, 2, 2] 590,080 Identity-450 [-1, 256, 2, 2] 0 ResidualConvUnit_custom-451 [-1, 256, 2, 2] 0 Identity-452 [-1, 256, 2, 2] 0 ReLU-453 [-1, 256, 2, 2] 0 ReLU-454 [-1, 256, 2, 2] 0 Conv2d-455 [-1, 256, 2, 2] 590,080 ReLU-456 [-1, 256, 2, 2] 0 ReLU-457 [-1, 256, 2, 2] 0 Conv2d-458 [-1, 256, 2, 2] 590,080 Identity-459 [-1, 256, 2, 2] 0
WORKFLOW I 2d RGB image Estimate Depth using DLT model convert depth to 3d point cloud import Rhino + GH Voxelize WORKFLOW Model Identity-388 [-1, 5, 768] 0 LayerNorm-389 [-1, 5, 768] 1,536 Linear-390 [-1, 5, 3072] 2,362,368 GELU-391 [-1, 5, 3072] 0 Dropout-392 [-1, 5, 3072] 0 Linear-393 [-1, 5, 768] 2,360,064 Dropout-394 [-1, 5, 768] 0 Mlp-395 [-1, 5, 768] 0 Identity-396 [-1, 5, 768] 0 Block-397 [-1, 5, 768] 0 LayerNorm-398 [-1, 5, 768] 1,536 Linear-399 [-1,
1,771,776 Dropout-400 [-1, 12, 5, 5] 0 Linear-401 [-1,
768]
Dropout-402 [-1, 5, 768] 0
[-1, 5, 768] 0 Identity-404 [-1,
768] 0 LayerNorm-405
768]
Linear-406 [-1,
0 Dropout-408 [-1,
0
0 ReLU-476
0 Conv2d-477
Identity-478 [-1,
0 ResidualConvUnit_custom-479 [-1,
0 Conv2d-480 [-1,
FeatureFusionBlock_custom-481 [-1,
0 ReLU-482 [-1,
0 ReLU-483 [-1, 256, 8, 8] 0 Conv2d-484 [-1, 256, 8, 8] 590,080 ReLU-485 [-1, 256, 8, 8] 0 ReLU-486 [-1, 256, 8, 8] 0 Conv2d-487 [-1, 256, 8, 8] 590,080 Identity-488 [-1, 256, 8, 8] 0 ResidualConvUnit_custom-489 [-1, 256, 8, 8] 0 Identity-490 [-1, 256, 8, 8] 0 ReLU-491 [-1, 256, 8, 8] 0 ReLU-492 [-1, 256, 8, 8] 0 Conv2d-493 [-1, 256, 8, 8] 590,080 ReLU-494 [-1, 256, 8, 8] 0 ReLU-495 [-1, 256, 8, 8] 0 Conv2d-496 [-1, 256, 8, 8] 590,080 Identity-497 [-1, 256, 8, 8] 0 ResidualConvUnit_custom-498 [-1, 256, 8, 8] 0 Conv2d-499 [-1, 256, 16, 16] 65,792 FeatureFusionBlock_custom-500 [-1, 256, 16, 16] 0 Conv2d-501 [-1, 128, 16, 16] 295,040 Interpolate-502 [-1, 128, 32, 32] 0 Conv2d-503 [-1, 32, 32, 32] 36,896 ReLU-504 [-1, 32, 32, 32] 0 Conv2d-505 [-1, 1, 32, 32] 33 ReLU-506 [-1, 1, 32, 32] 0 Identity-507 [-1, 1, 32, 32] 0 Total params: 120,753,921 Trainable params: 120,753,921 Non-trainable params: 0Input size (MB): 0.01 Forward/backward pass size (MB): 24.70 Params size (MB): 460.64 Estimated Total Size (MB): 485.35 [-1, 256, 2, 2] 512 StdConv2dSame-133 [-1, 1024, 2, 2] 262,144 Identity-134 [-1, 1024, 2, 2] 0 GroupNormAct-135 [-1, 1024, 2, 2] 2,048 Identity-136 [-1, 1024, 2, 2] 0 ReLU-137 [-1, 1024, 2, 2] 0 Bottleneck-138 [-1, 1024, 2, 2] 0 StdConv2dSame-139 [-1, 256, 2, 2] 262,144 ReLU-140 [-1, 256, 2, 2] 0 GroupNormAct-141 [-1, 256, 2, 2] 512 StdConv2dSame-142 [-1, 256, 2, 2] 589,824 ReLU-143
2, 2] 262,144 Identity-206 [-1, 1024, 2, 2] 0 GroupNormAct-207 [-1, 1024, 2, 2] 2,048 Identity-208 [-1, 1024, 2, 2] 0 ReLU-209 [-1, 1024, 2, 2] 0 Bottleneck-210 [-1, 1024, 2, 2] 0 ResNetStage-211 [-1, 1024, 2, 2] 0 Identity-212 [-1, 1024, 2, 2] 0 Identity-213 [-1, 1024, 2, 2] 0 Identity-214 [-1, 1024, 2, 2] 0 SelectAdaptivePool2d-215 [-1, 1024, 2, 2] 0 Identity-216 [-1, 1024, 2, 2] 0 Identity-217 [-1, 1024, 2, 2] 0 ClassifierHead-218 [-1, 1024, 2, 2] 0 ResNetV2-219 [-1, 1024, 2, 2] 0 Conv2d-220 [-1, 768, 2, 2] 787,200 Dropout-221 [-1, 5, 768] 0 LayerNorm-222 [-1, 5, 768] 1,536 Linear-223 [-1, 5, 2304] 1,771,776 Dropout-224 [-1, 12, 5, 5] 0 Linear-225 [-1, 5, 768] 590,592 Dropout-226 [-1, 5, 768] 0 Attention-227 [-1, 5, 768] 0 Identity-228 [-1, 5, 768] 0 LayerNorm-229 [-1, 5, 768] 1,536 Linear-230 [-1, 5, 3072] 2,362,368 GELU-231 [-1, 5, 3072] 0 Dropout-232 [-1, 5, 3072] 0 Linear-233 [-1, 5, 768] 2,360,064 Dropout-234 [-1, 5, 768] 0 Mlp-235 [-1, 5, 768] 0 Identity-236 [-1, 5, 768] 0 Block-237 [-1, 5, 768] 0 LayerNorm-238 [-1, 5, 768] 1,536 Linear-239 [-1, 5, 2304] 1,771,776 Dropout-240 [-1, 12, 5, 5] 0 Linear-241 [-1, 5, 768] 590,592 Dropout-242 [-1, 5, 768] 0 Attention-243 [-1, 5, 768] 0 Identity-244 [-1, 5, 768] 0 LayerNorm-245 [-1, 5, 768] 1,536 Linear-246 [-1, 5, 3072] 2,362,368 GELU-247 [-1, 5, 3072] 0 Dropout-248 [-1, 5, 3072] 0 Linear-249 [-1, 5, 768] 2,360,064 Dropout-250 [-1, 5, 768] 0 Mlp-251 [-1, 5, 768] 0 Identity-252 [-1, 5, 768] 0 Block-253 [-1, 5, 768] 0 LayerNorm-254 [-1, 5, 768] 1,536 Linear-255 [-1, 5, 2304] 1,771,776 Dropout-256 [-1, 12, 5, 5] 0 Linear-257 [-1, 5, 768] 590,592 Dropout-258 [-1, 5, 768] 0 Dropout-264 [-1, 5, 3072] 0 Linear-265 [-1, 5, 768] 2,360,064
[-1,
0 Identity-372 [-1,
0 LayerNorm-373
Linear-374 [-1,
2,362,368 GELU-375 [-1,
0 Dropout-376 [-1,
0 Linear-377 [-1,
2,360,064 Dropout-378 [-1, 5, 768] 0 Mlp-379 [-1, 5, 768] 0 Identity-380 [-1, 5, 768] 0 Block-381 [-1, 5, 768] 0 LayerNorm-382 [-1, 5, 768] 1,536 Linear-383 [-1, 5, 2304] 1,771,776 Dropout-384 [-1, 12, 5, 5] 0 Linear-385 [-1, 5, 768] 590,592 Attention-259 [-1, 5, 768] 0 Identity-260 [-1, 5, 768] 0 LayerNorm-261 [-1, 5, 768] 1,536 Linear-262 [-1, 5, 3072] 2,362,368 GELU-263 [-1, 5, 3072] 0 Dropout-386 [-1, 5, 768] 0 Attention-387 [-1, 5, 768] 0 =========================================== ===================== Total params: 120,753,921 Trainable params: 120,753,921 Non-trainable params: 0 Input size (MB): 0.01 Forward/backward pass size (MB): 24.70 Params size (MB): 460.64 Estimated Total Size (MB): 485.35 DPT_Hybrid MiDAS ViT-Hybrid
5, 2304]
5,
590,592
Attention-403
5,
[-1, 5,
1,536
5, 3072] 2,362,368 GELU-407 [-1, 5, 3072]
5, 3072]
Linear-409 [-1, 5,
ResidualConvUnit_custom-460 [-1, 256, 2, 2] 0 Conv2d-461 [-1, 256, 4, 4] 65,792 FeatureFusionBlock_custom-462 [-1, 256, 4, 4] 0 ReLU-463 [-1, 256, 4, 4] 0 ReLU-464 [-1, 256, 4, 4] 0 Conv2d-465 [-1, 256, 4, 4] 590,080 ReLU-466 [-1, 256, 4, 4] 0 ReLU-467 [-1, 256, 4, 4] 0 Conv2d-468 [-1, 256, 4, 4] 590,080 Identity-469 [-1, 256, 4, 4] 0 ResidualConvUnit_custom-470 [-1, 256, 4, 4] 0 Identity-471 [-1, 256, 4, 4] 0 ReLU-472 [-1, 256, 4, 4] 0 ReLU-473 [-1, 256, 4, 4] 0 Conv2d-474 [-1, 256, 4, 4] 590,080 ReLU-475 [-1, 256, 4, 4]
[-1, 256, 4, 4]
[-1, 256, 4, 4] 590,080
256, 4, 4]
256, 4, 4]
256, 8, 8] 65,792
256, 8, 8]
256, 8, 8]
5, 768]
5, 768]
[-1, 5, 768] 1,536
5, 3072]
5, 3072]
5, 3072]
5, 768]
DEPTH CITY
2D RGB IMAGES
Side by side comparison of image and depth map
An approach to Dense Depth estimation from a single image
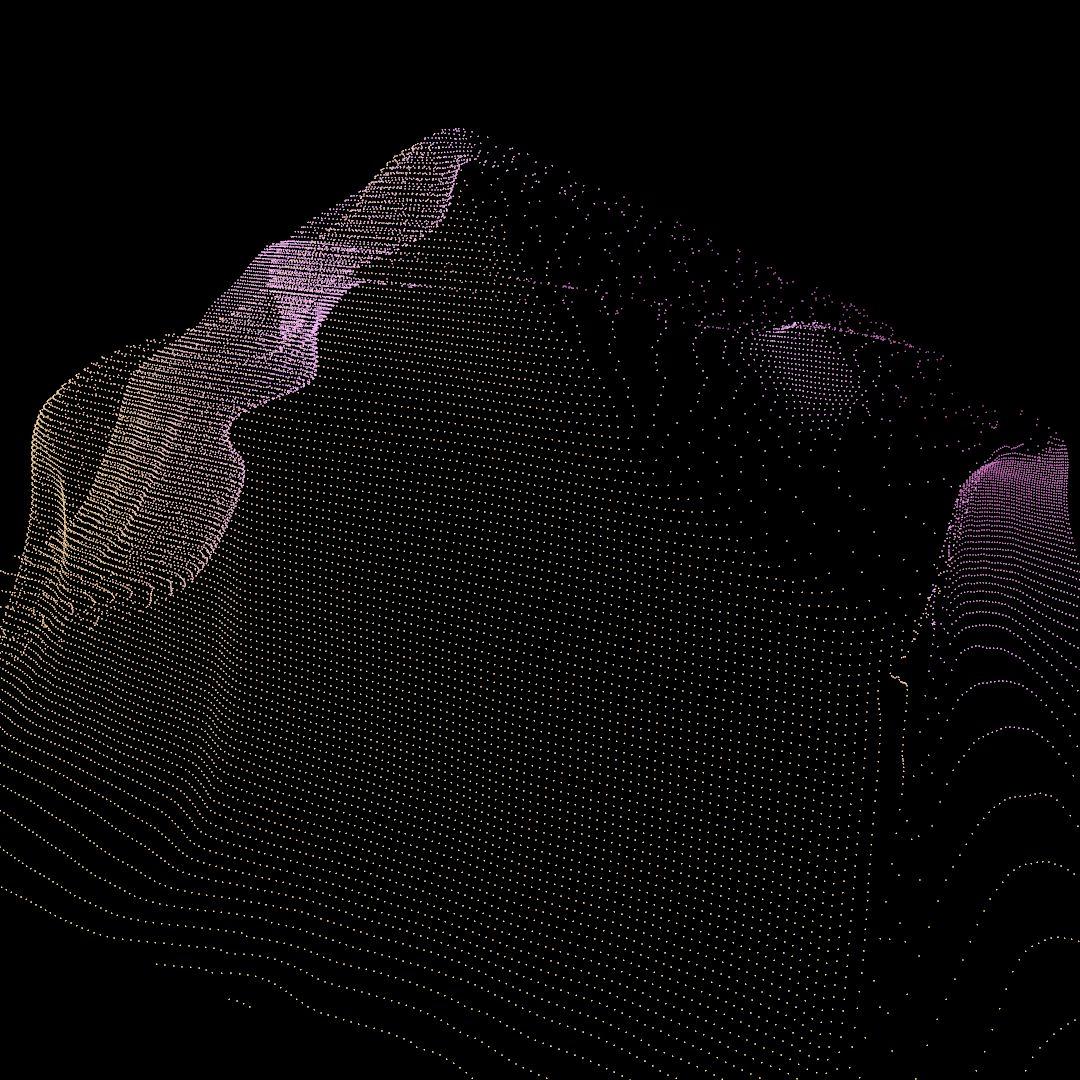
Depth to Point Cloud
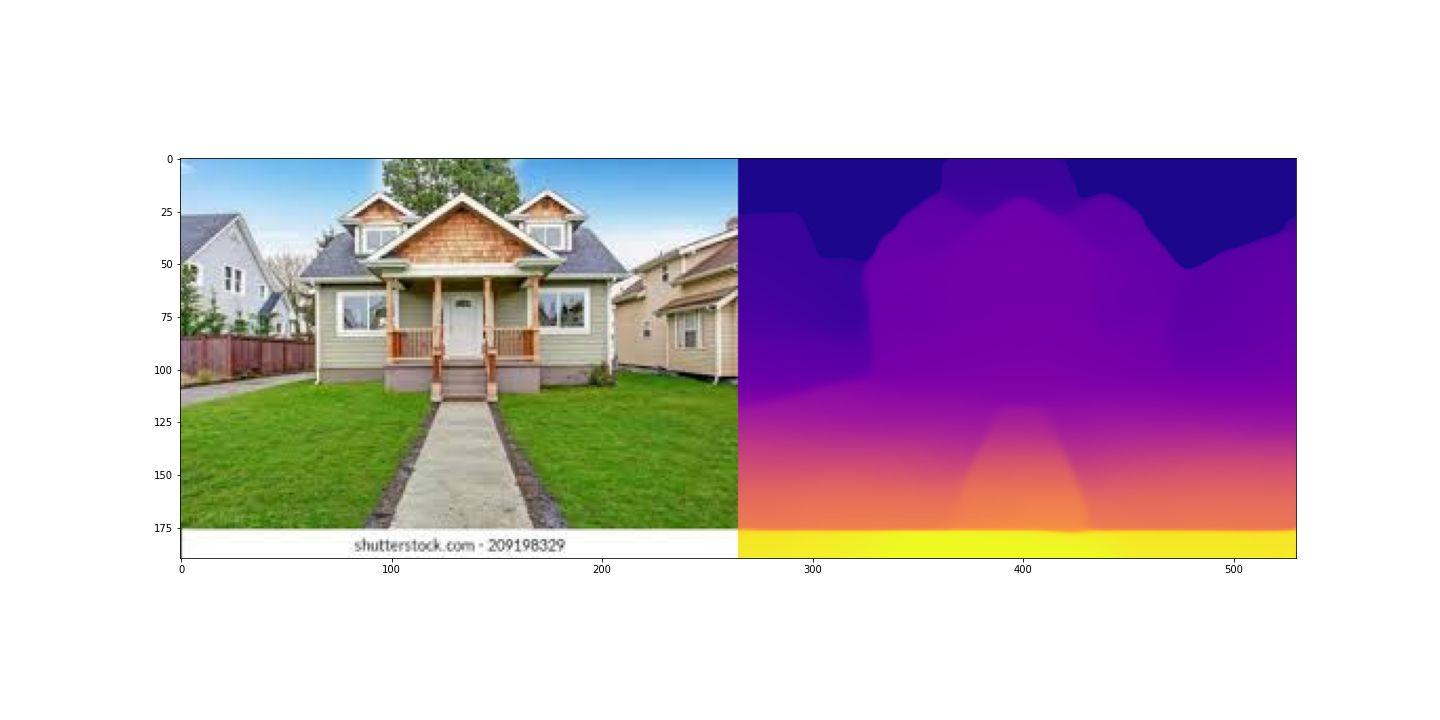
Side by side comparison of image and depth map
Depth Map to Point Cloud
DEPTH CITY
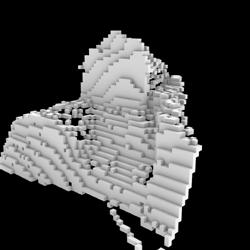
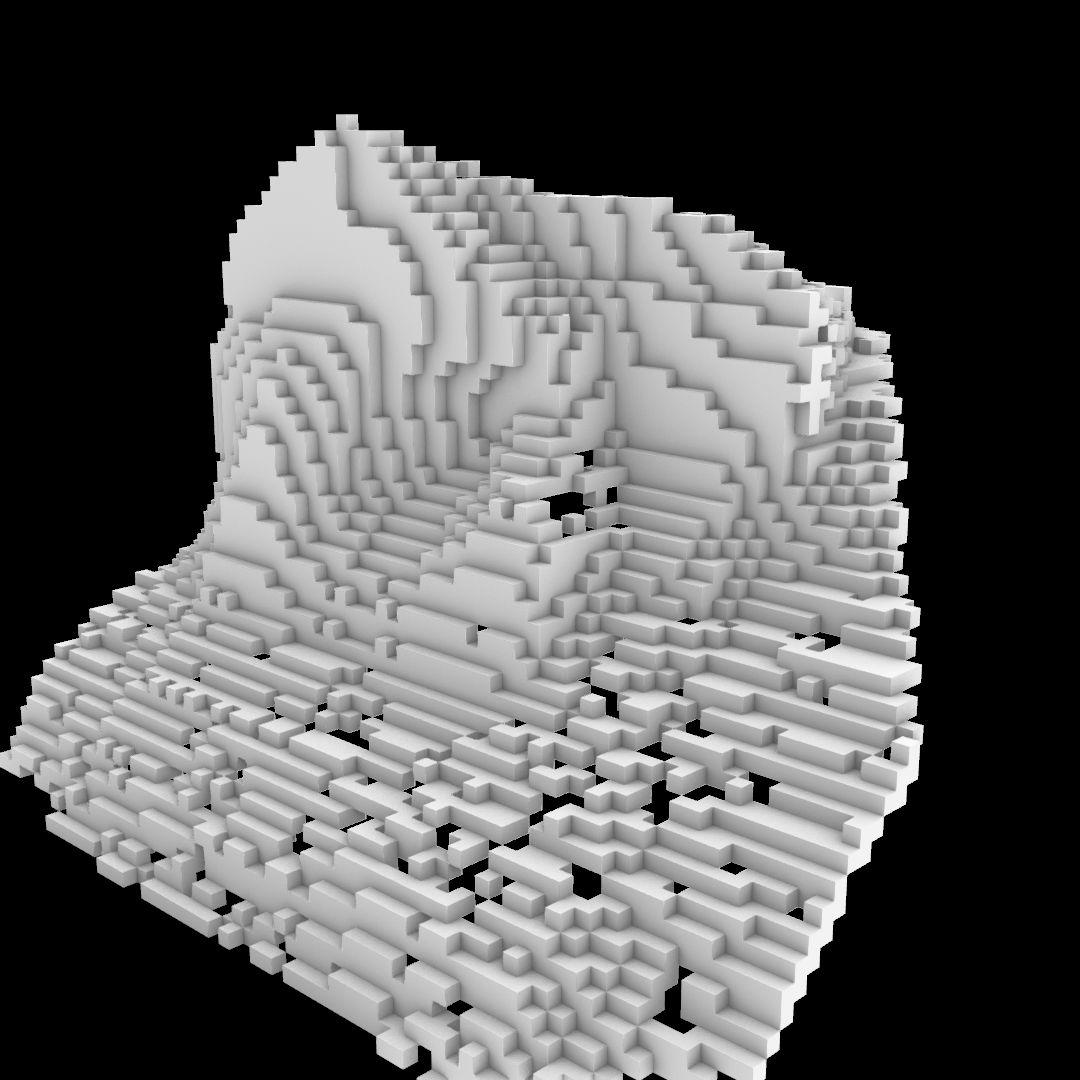
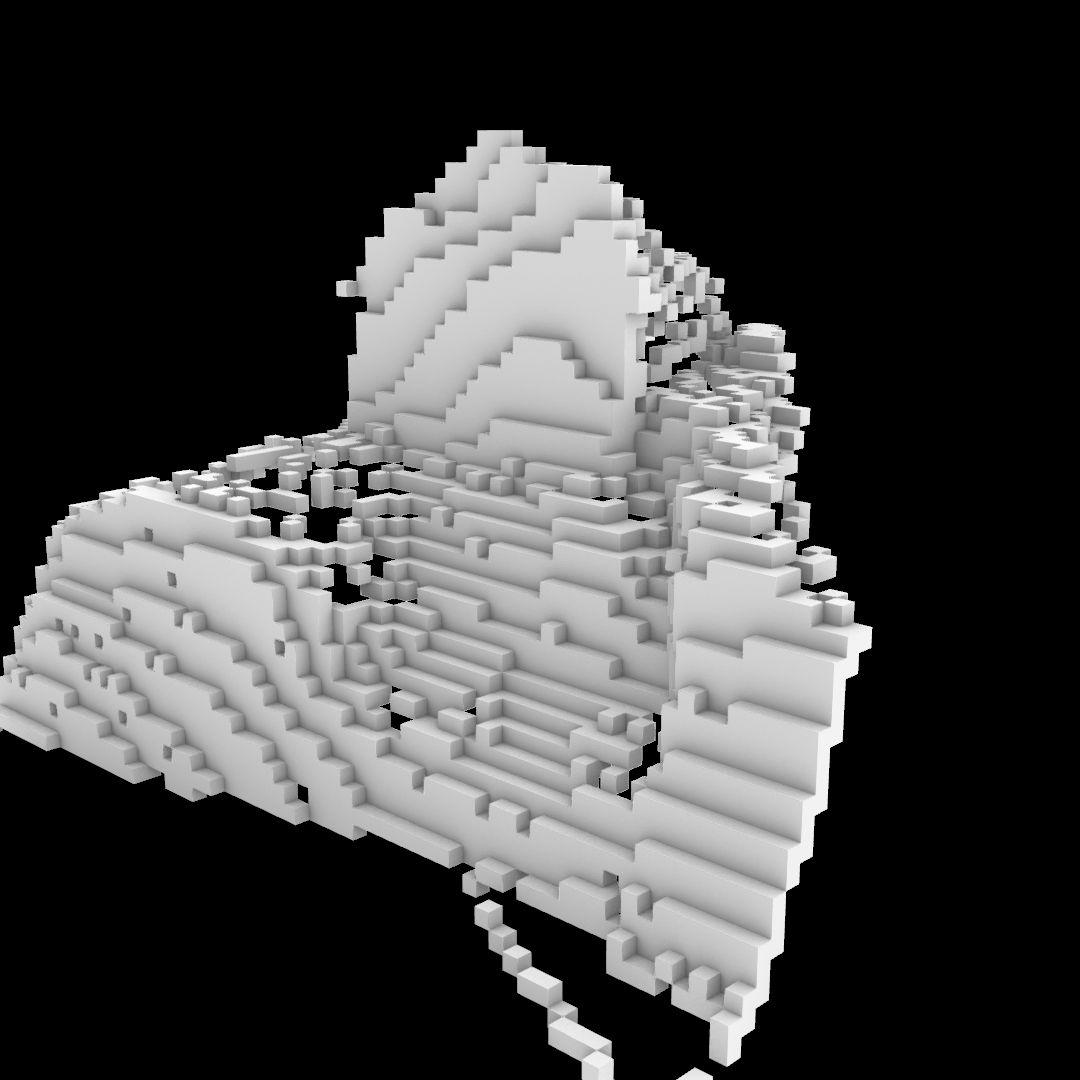
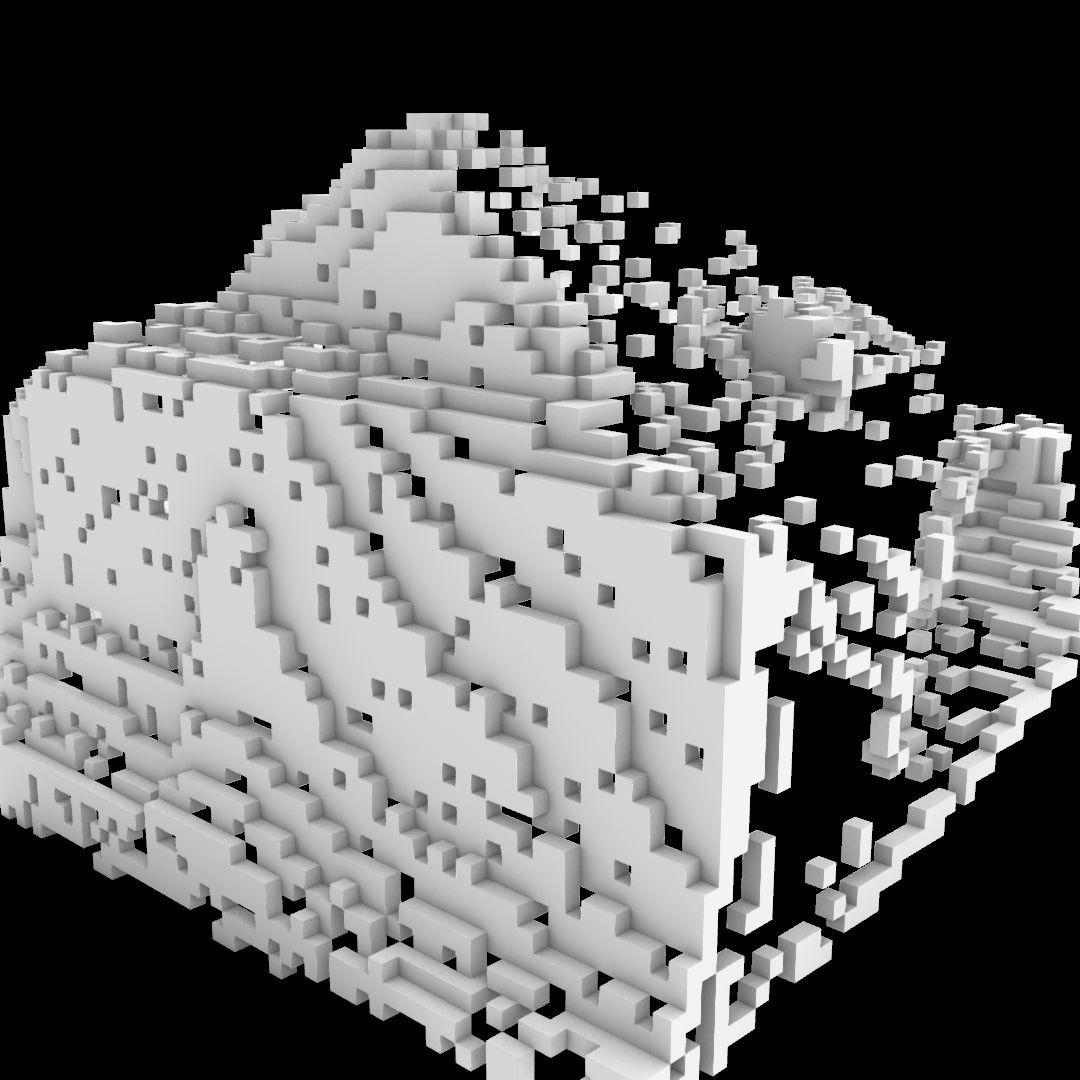
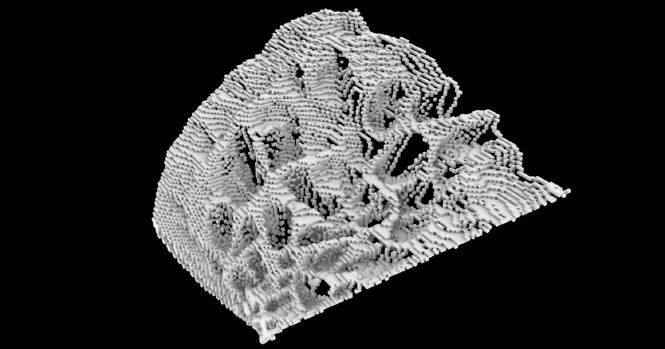
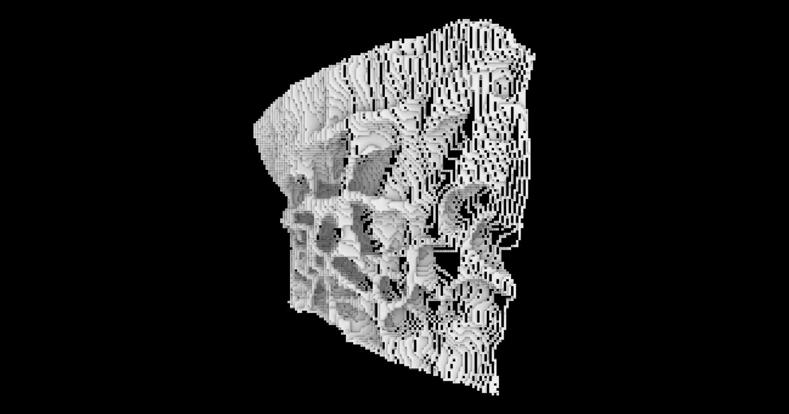
convert depth to 3d point cloud convert 3d point cloud to voxels
DEPTH
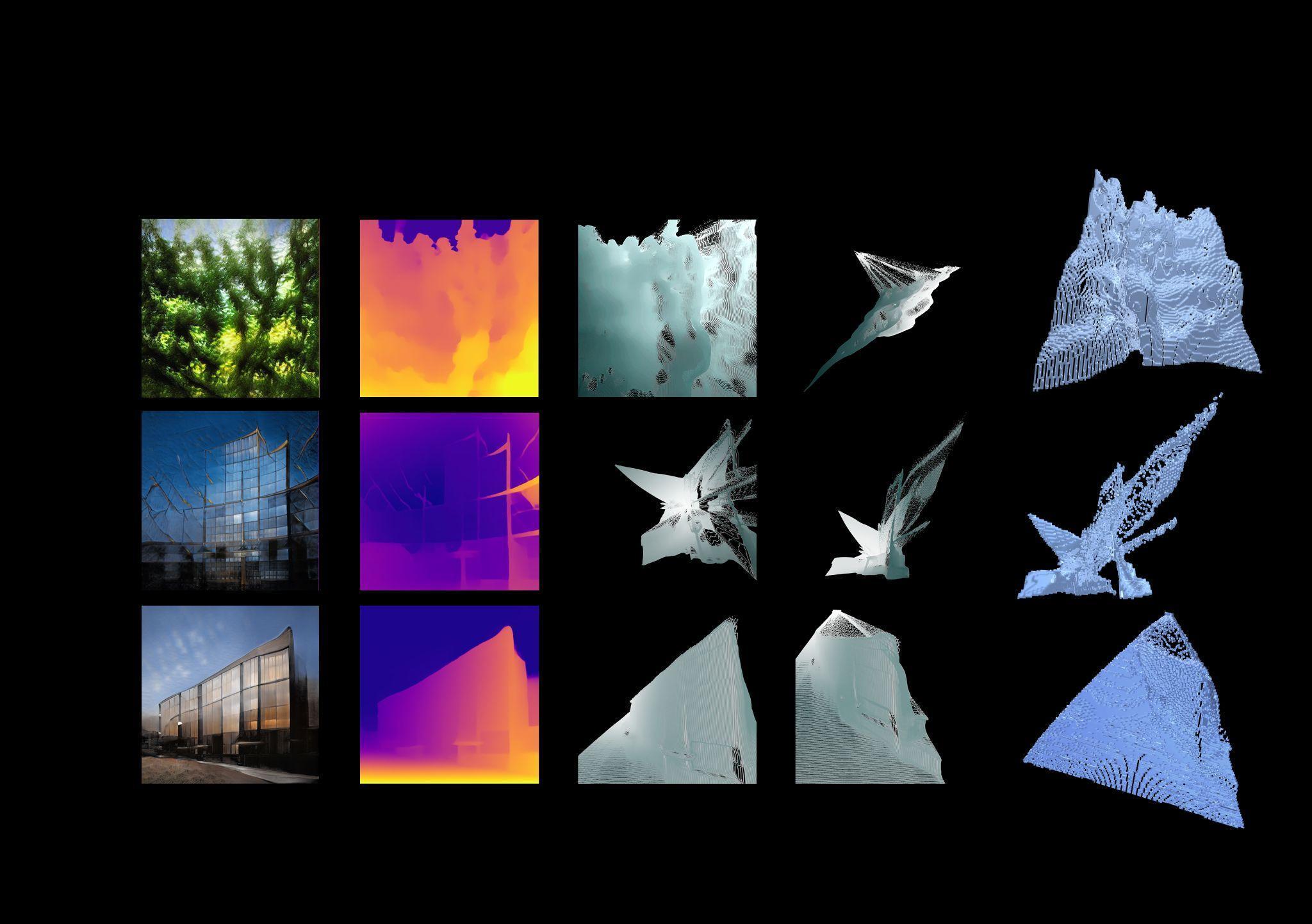

2d style GAN image Estimate Depth using DLT model convert to 3d point 2D GAN DEPTH ESTIMATION FROM 2D STYLE GAN 2d style GAN imageS Estimate Depth using DLT model convert depth to 3d point cloud Voxelize 3d point cloud, rotated angel
CITY WORKFLOW
2D STYLE GAN Credits: CHARBEL BALISS AND SOPHIE MOORE
II
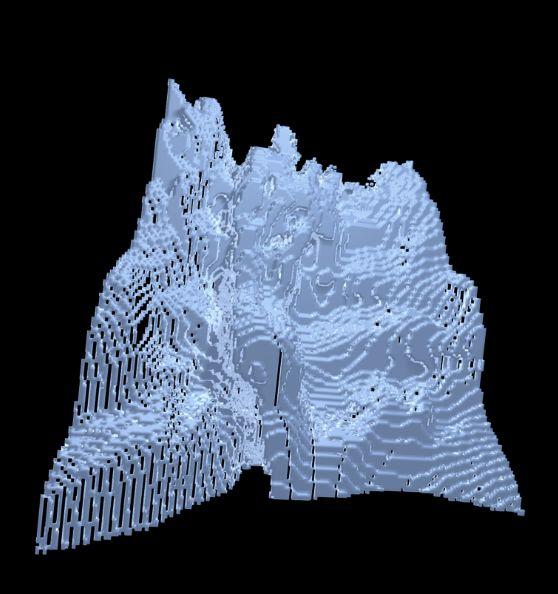

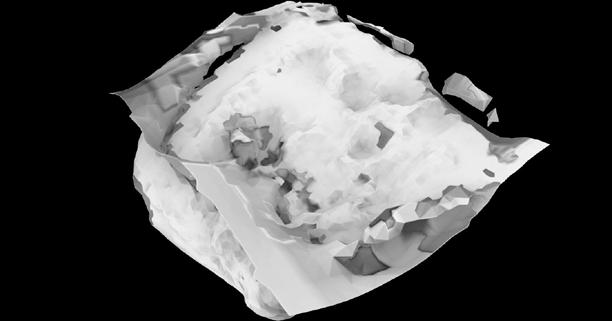
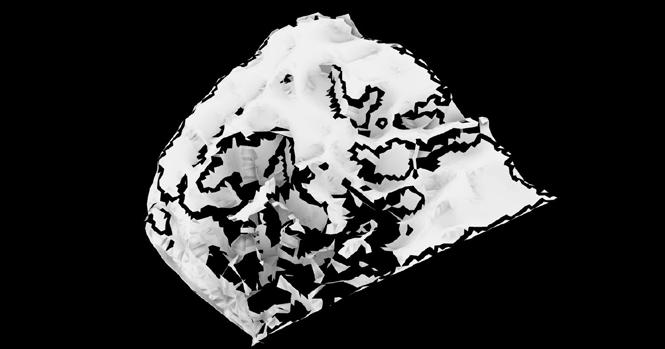
convert depth point cloud import Rhino + GH Voxelize Rendered in 3D max MESHING ATTEMPTS BALL PIVOTING ALGORITHM BPA POISSON RECONSTRUCTION Voxel size: 0.1 Vertices: 1325 Depth: 8 Scale: 1.1 Voxel size: 0.05 Vertices: 8149 Voxel size: 0.01 Vertices: 58412 Depth: 6 Scale: 2 Depth: 6 Scale: 1.1 DEPTH MAP VOXELIZED
2d style GAN imageS Estimate Depth using DLT model convert to 3d point 2D STYLE GAN Credits: CHARBEL BALISS AND SOPHIE MOORE 2D GAN DEPTH ESTIMATION FROM 2D STYLE GAN DEPTH CITY
depth point cloud Voxelize 3d point cloud, rotated angel
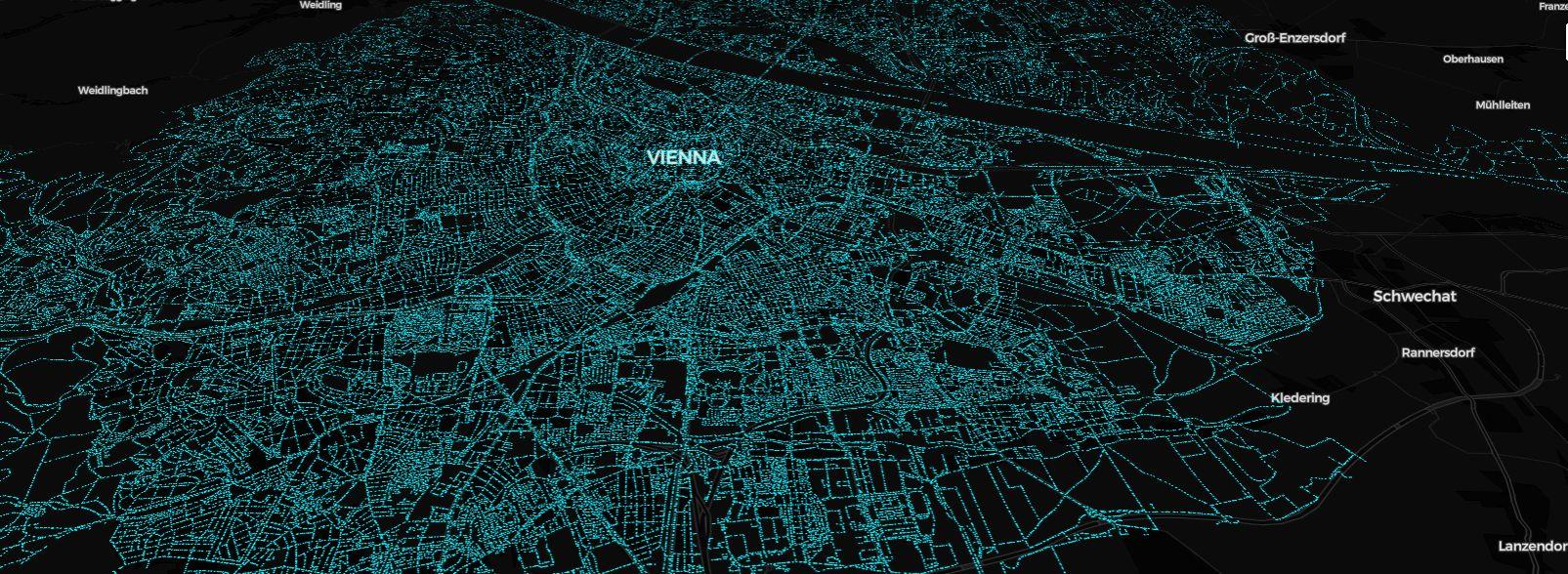
GAME OF GREEN
17
Date: 2022
Location: Vienna, Austria
Collaborators: Charbel Baliss, Jacinto Jesús Moros Montañés, Jumana Hamdani, Lucía Leva
Instructor: Angelos Chronis
Project Type: Academic at IAAC
Tools: Python, Google Colab, Open Street Maps, Carto, Mapbox, QGIS, Open Data Austria, Nasa Power
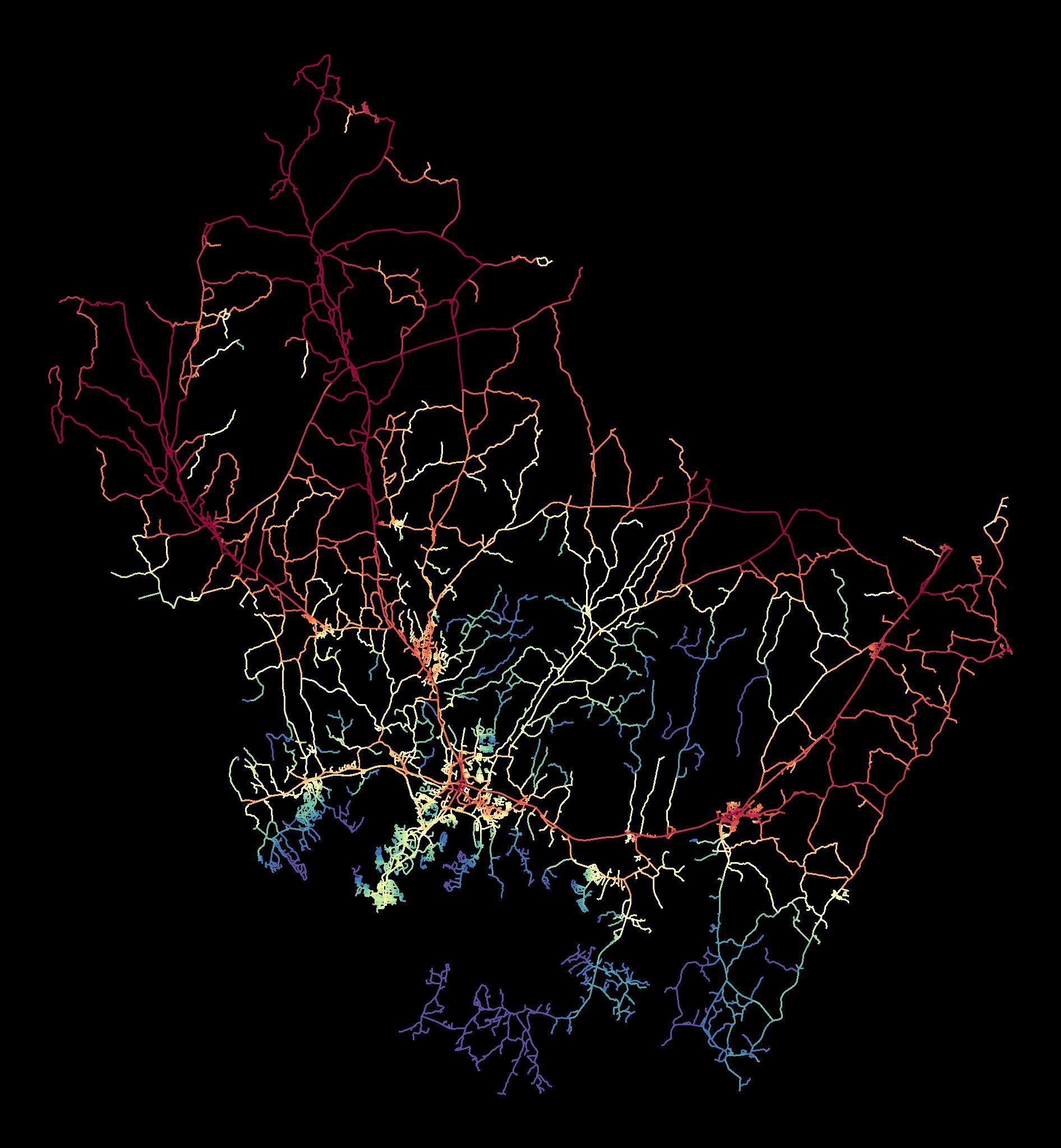
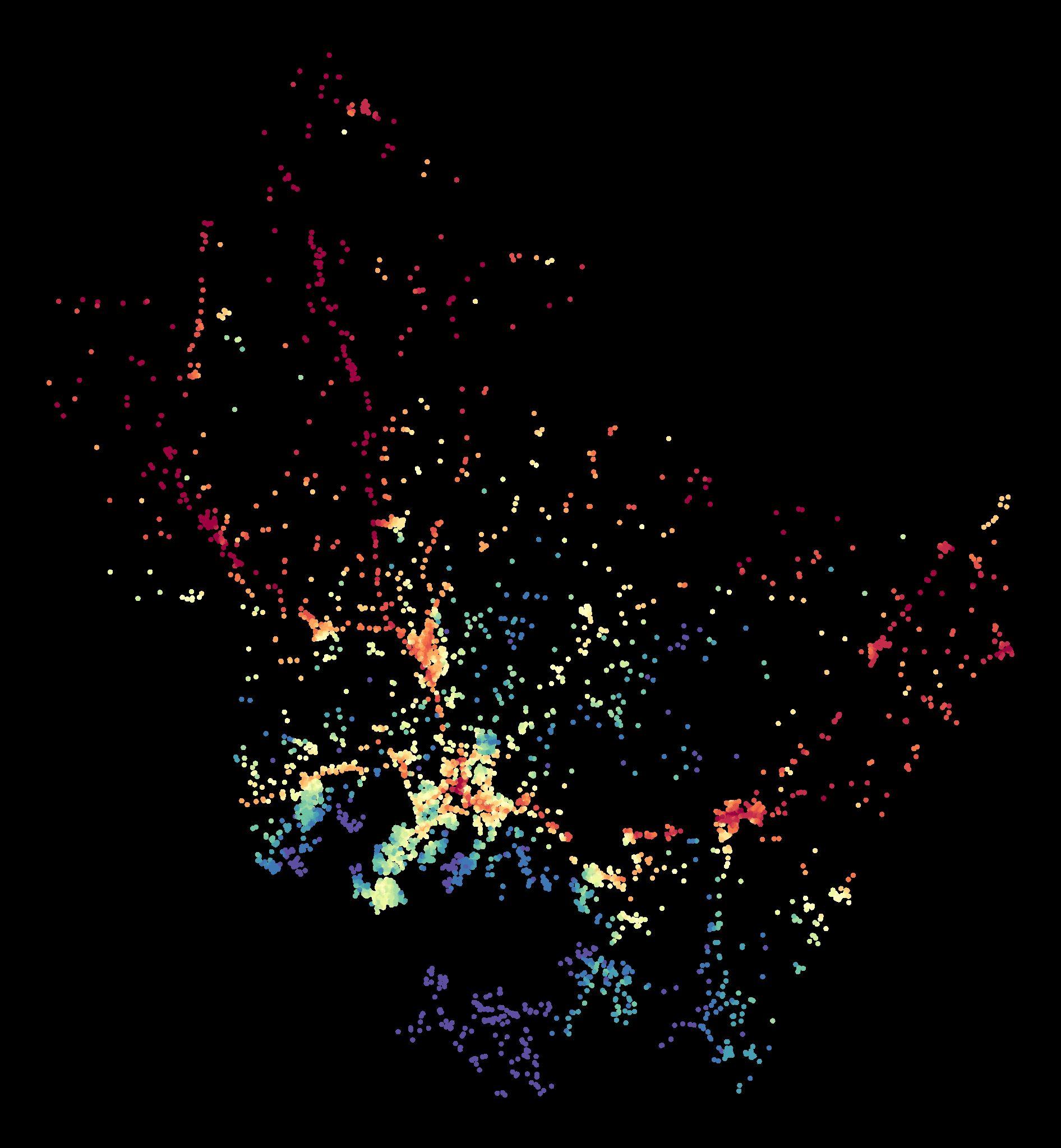
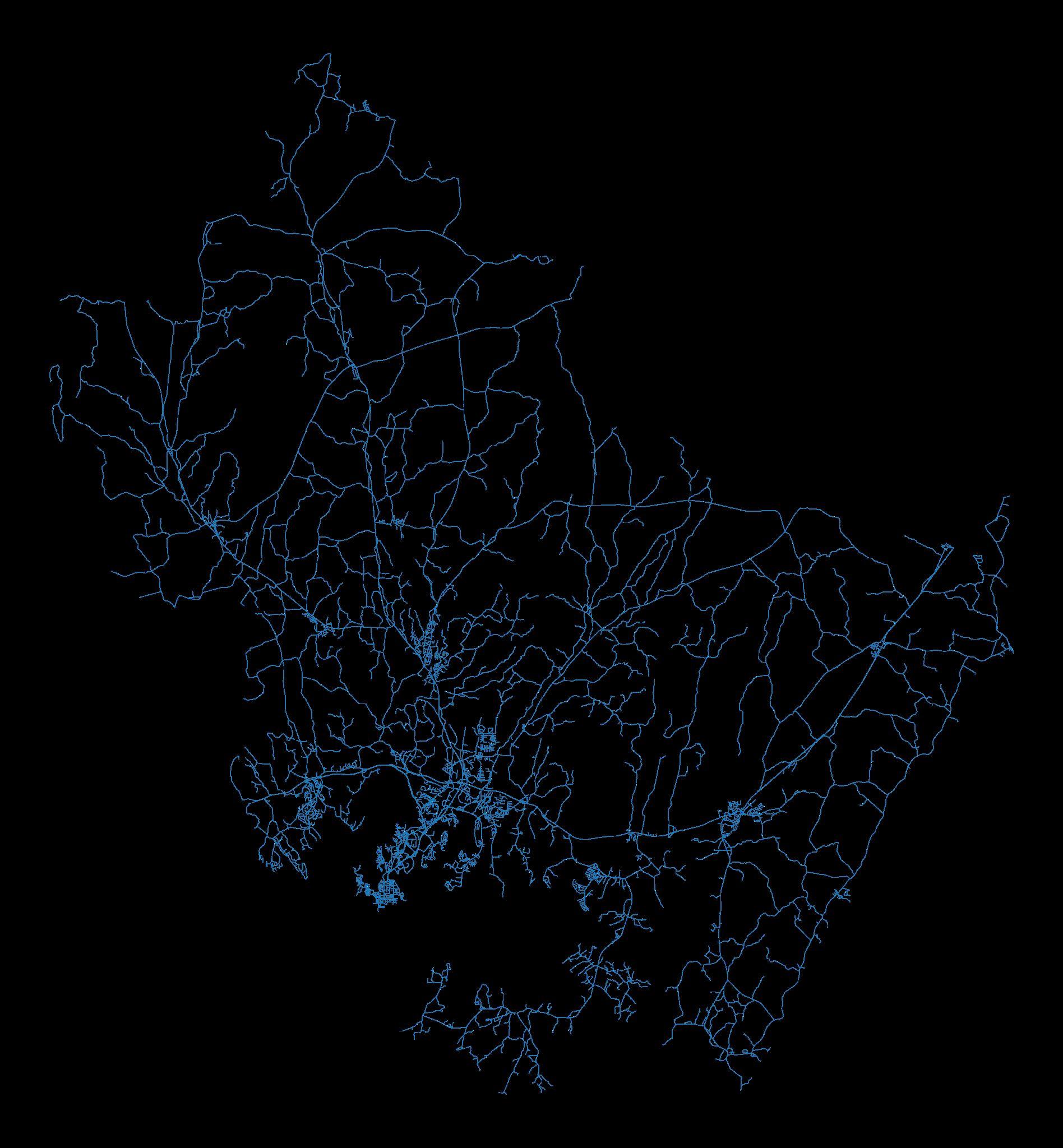
GAME OF GREEN responds to the lack of Greeneries in the city of Vienna specially the central area. Designed for the decision makers including urban planners, architects, politicians and even inhabitants to participate with their opinions for a better future. Game of Green will propose the optimal locations of planting trees, displaying a score map where adding a tree can make an environmental change
Street of Vienna 824,957 study points VIENNA



































DATA CREATION> EXTRACTING / COMPILING O. D. Österreich (Intg.) Trees
(string) Land use
POWER (float) Air quality
POWER (float) Temperature
POWER (float) Humidity NASA POWER (float) Wind speed
POWER (float) Wind direction NASA POWER (float) Total cloud sky
POWER (float) Precipitation water
POWER (float) Earth temperature
POWER (float) Direct illuminance
POWER (float) Diffuse illuminance
POWER (float) Irradiation NASA POWER (float) water FEATURES DATA SOURCES Notebook #3 [ Train the second model ] 2021 2021 DATA PREDICTING 2022 SCORE 2022 BEFORE SCORE! 824,957 STUDY POINTS Notebook #1 [DATA] weighted & scored METHODOLOGY Street of Vienna 824,957 study points 14 Features Choose a RADIUS Add TREES New SCORE! 2 Before Score Past DATA 2001-2020 [ INPUT ] [ OUTPUT [ USER INPUT ] [ PRESENT DATA UPDATED ] 2022 BEFORE SCORE! Notebook #2 [ Train the first model ] 1 GAME OF GREEN
OSMX
NASA
NASA
NASA
NASA
NASA
NASA
NASA
NASA
NASA








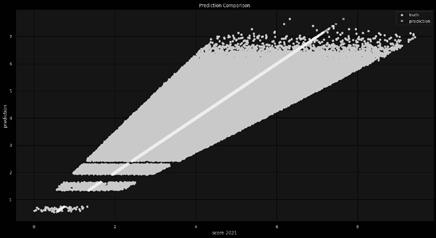

824,957 study points 10m 10m 10m STREET NETWORK DIVISION Compiling all the data on the street network points VIENNA Final Spatial Unit WIEN Pick a POINT After Score OUTPUT ] [ Train the second model ] Run pca 2021 DATA 2021 METHODOLOGY> ML IN DEPTH PCA 14 FEATURES Trees Land use Air Quality Radiation Humidity Wind speed Wind direction Total cloud sky Precipitation water Earth skin temperature Direct illuminance Diffuse illuminance Irradiation 824,957 STUDY POINTS 2000 2005 2010 2015 2017 2018 2019 2021 UPDATED BY THE USER 2016 2022 AFTER SCORE! 2022 BEFORE SCORE! Linear Regression Prediction - SL 2 2000 2005 2010 2015 2017 2018 2019 2021 2021 SCORED DATA 2016 2022 BEFORE SCORE! 2000-2020 PAST SCORED Linear Regression Prediction - SL 2022 SCORE! After adding trees










column = 'value_temperature' ● <= 9ºC = 0 ● > 9ºC & <= 20ºC = 0.5 ● > 20ºC &<= 40ºC = 1 ● > 40ºC = 0 column = 'value_windSpeed' ● <= 2.3 m/s, 0 ● > 2.3m/s & <= 6m/s, 1 ● > 6m/s, 0 column = 'value_windDirection' ● 210º, 0 ● 210º & <= 230º , 1 ● > 230º, 0.5 column = 'value_skyCover' ● <= 63%, 0 ● > 63% & <= 68%, 1 ● > 68% & <= 73%, 0.5 ● > 73%, 0 ● > 10000 lux & <= 12500 lux, 1 ● > 12500 lux & <= 15000 lux, 0.5 ● > 15000 lux, 0 column = value_irradiation' ● <= 5 W/m^2, 0 ● > 5 W/m^2 & <= 6.5 W/m^2, 0.5 ● > 6.5 W/m^2 & <= 7.5 W/m^2, 1 ● > 7.5 W/m^2, 0 ● > 50m & <= 100m, 0.5 ● > 100m, 0 column = 'value_water' ● <= 0m, 1 ● > 0m & <= 50m, 1 ● > 50m & <= 100m, 0.5 ● > 100m, 0 WIEN Pick a POINT Choose a RADIUS Add TREES New SCORE! USER INPUT 1 2 3 4 RESULTS GAME OF GREEN 0 1 2 4 5 6 8 9 10 Score Chart Before Score After Score URBAN GREEN ANALYSIS TOOLBOX showing the power of how planting a tree can make an environmental change AI PREDICTIVE MODEL column = 'value_earthTemperature' ● <= 10ºC, 0 ● > 10ºC &<= 26ºC, 0.5 ● > 26ºC &<= 30ºC, 1 ● > 30ºC &<= 45ºC, 0.5 ● > 45ºC, 0 column = 'value_airQuality' ● <= 10µg/m3, 0 ● > 0µg/m3 & <= 5µg/m3, 1 ● > 5µg/m3 & <= 15µg/m3, 0.5 ● > 15µg/m3, 0 GAME OF GREEN

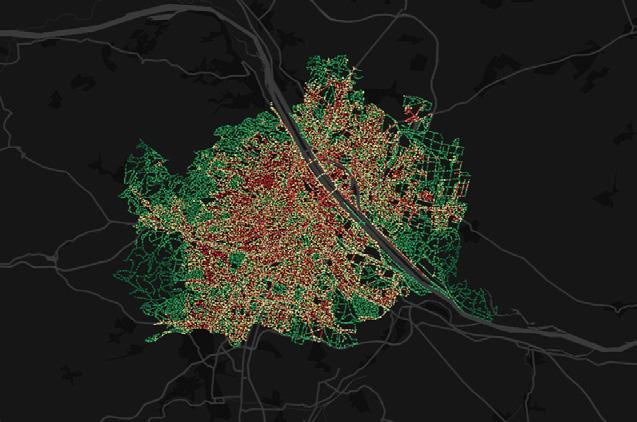
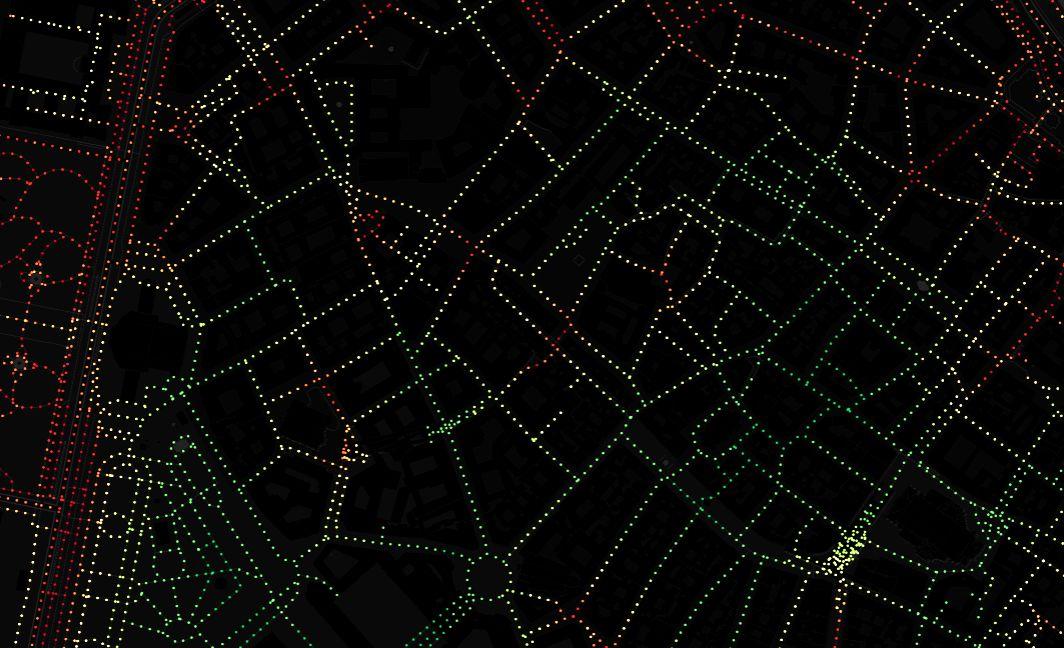







0 1 Scoring the points 0 1 2 3 4 5 6 7 8 9 Score Chart 0 1 0 Volksgarten Burgtheater DATASET CREATION> SCORING DATASET CREATION> SCORING 6.5 7










GAME OF GREEN Numbers of Trees = 0 1 2 3 4 5 6 7 8 9 10 Circle Radius = 50 m Pick a Point Calculate! Score Chart Before Score After Score 6.5 5





SUBWAY CITY
18
Date: 2022
Location: Stockholm, Munich, Prague
Collaborators: Amanda Gioia, Jumana Hamdani, Sophie Moore
Instructor: David Andrés León
Project Type: Academic at IAAC
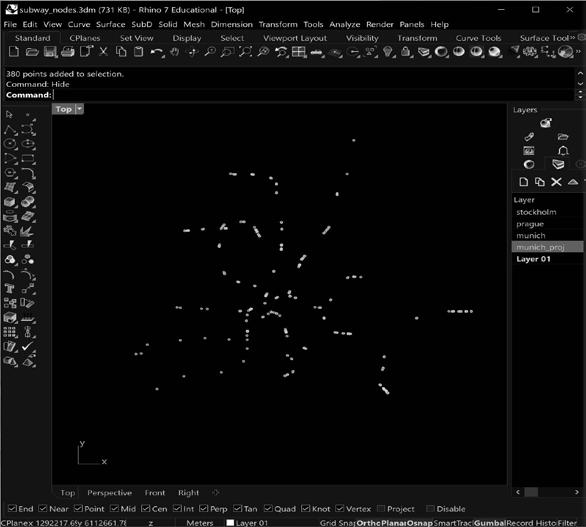
Tools: Rhino,Grasshopper, Hops, Python, Graph Theory, Flask, Google Colab
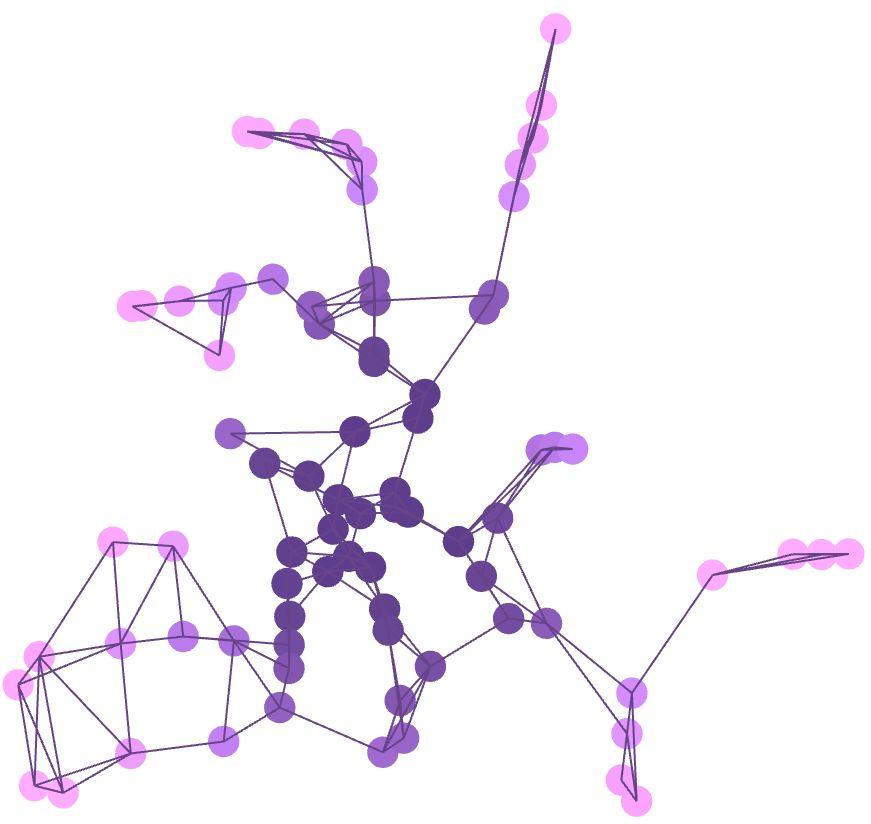
Subway Cities is an urban analysis of the subway network.
In this project we investigated the subway networks of 3 case study cities: Munich, Stockholm and Prague. We often hear citizens complain about how the subway network in their cities could be better. We wanted to challenge that theory by asking our classmates and ourselves to redraw the subway connections to propose better connectivity.
SUBWAY CITY

SUBWAY MAPS
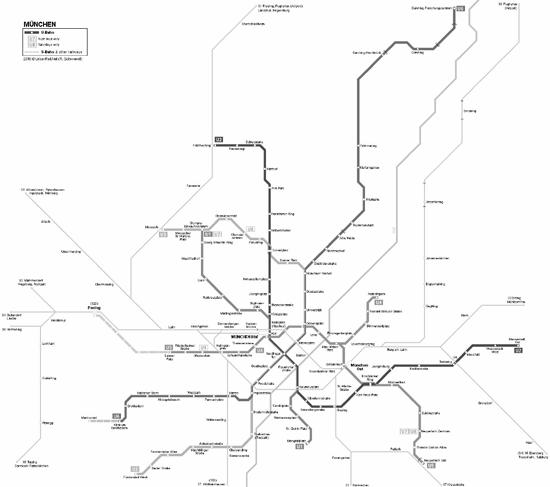
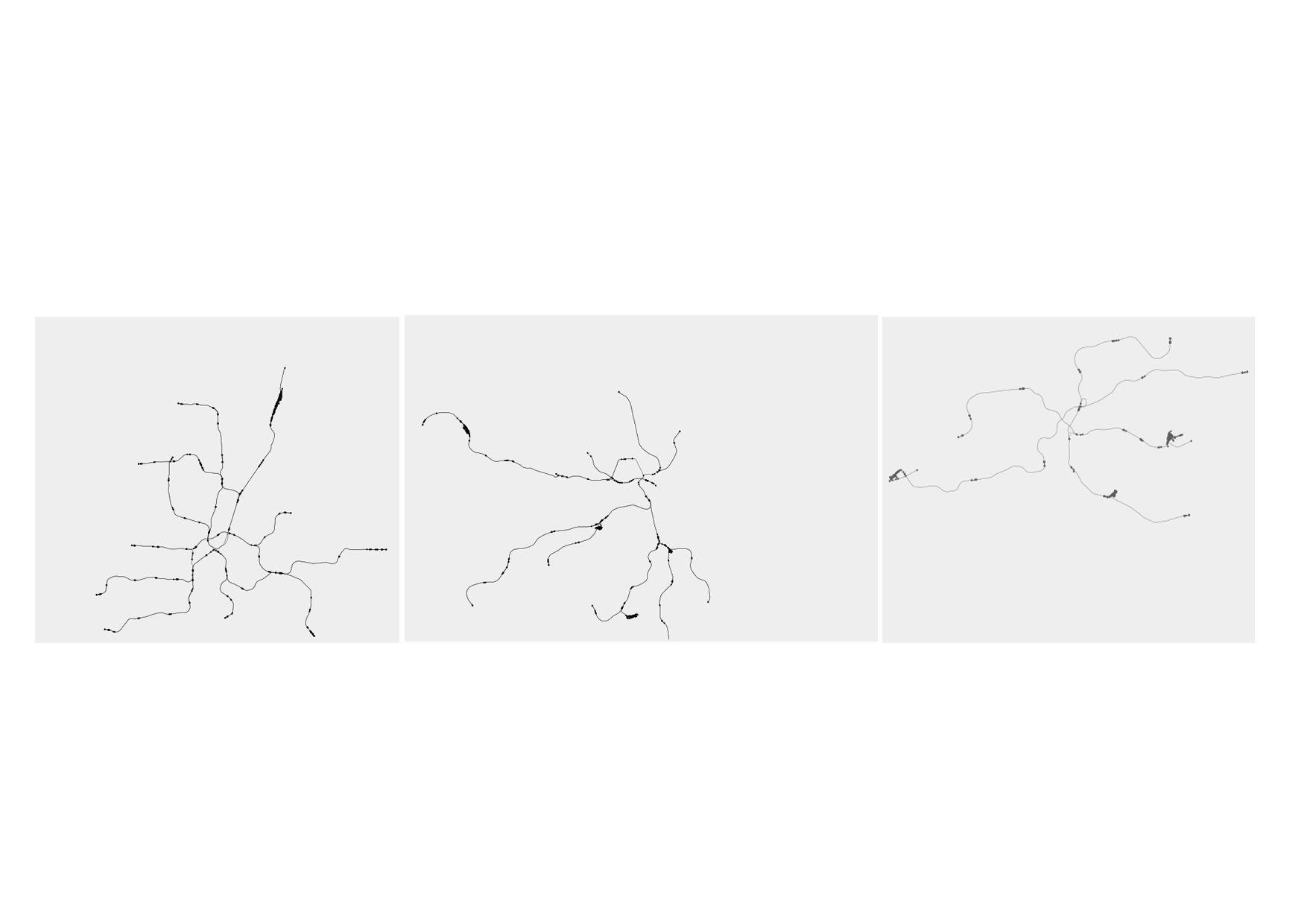
SUBWAY NETWORK


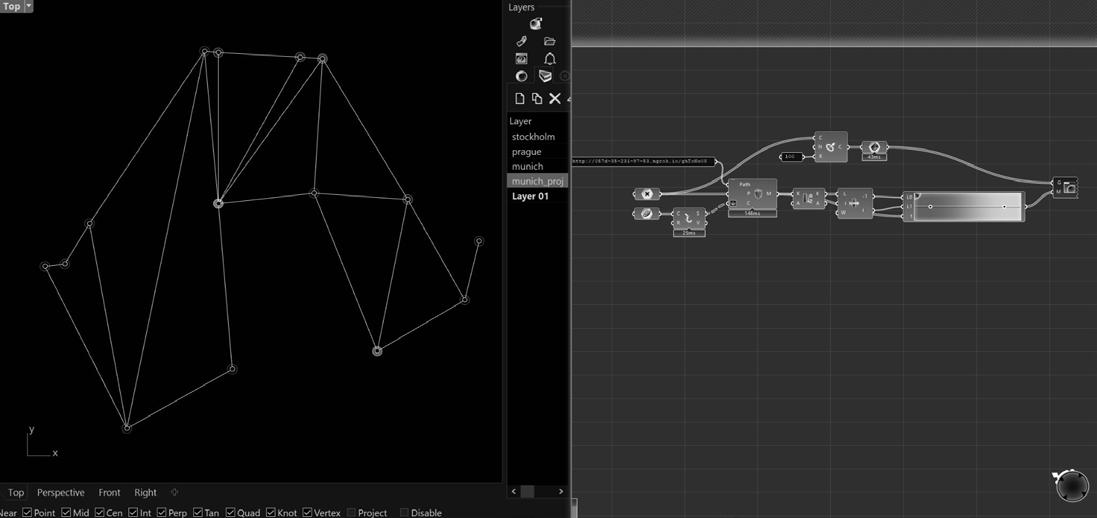




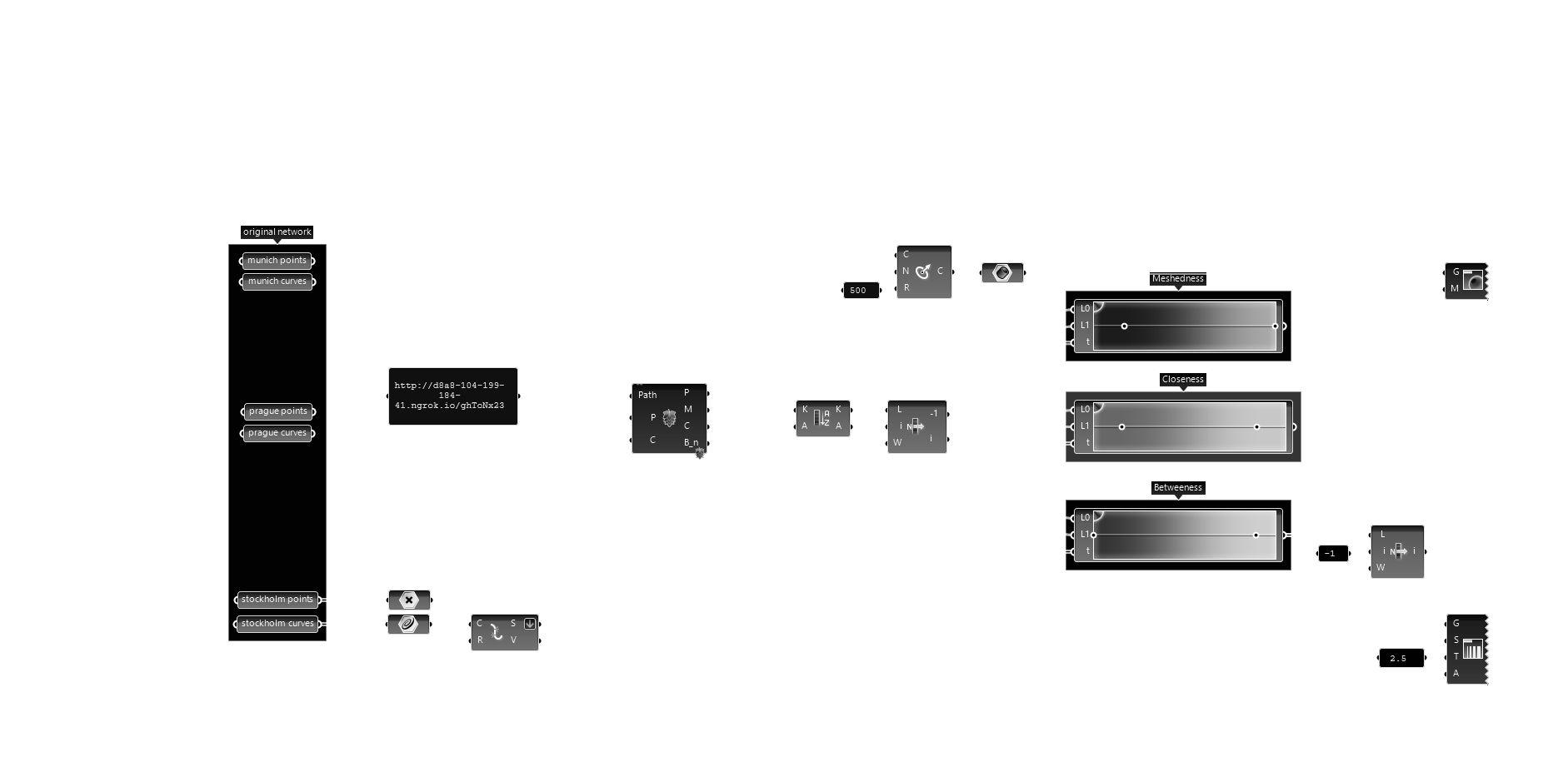
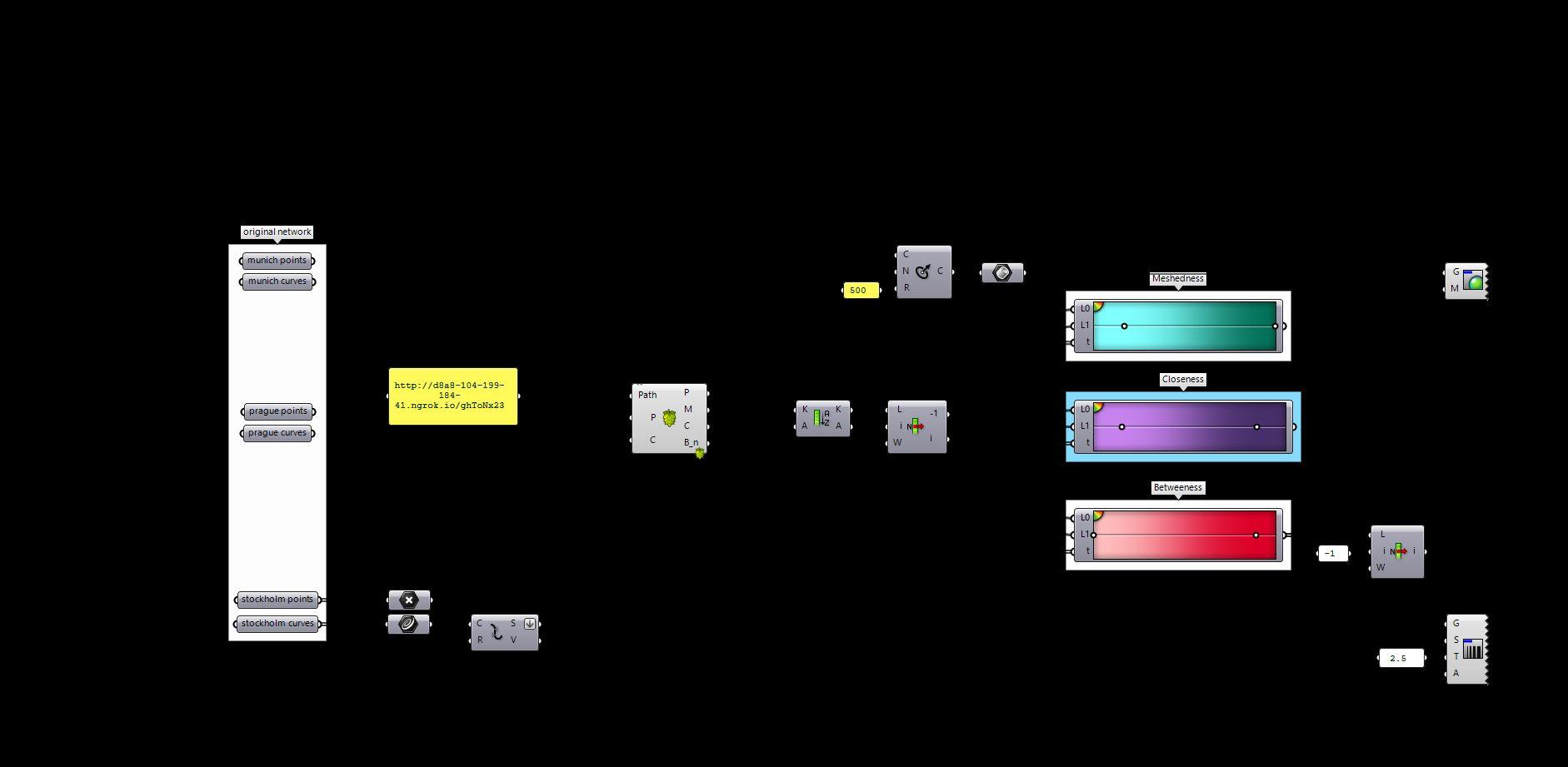



WORKFLOW SUBWAY NETWORK STEP 03 USERS CAN DRAW THEIR OWN SUBWAY ROUTES BETWEEN STATIONS (RHINO) STEP 04 WITH HOPS USER ROUTES ARE CONVERTED INTO A NETWORK GRAPH THAT CAN BE ANALYZED Draw! STEP 05 URBAN ANALYSIS NETWORK FOR THE NEW SUBWAY Urban Analysis Network For The Existing Subway COMPARE! Analysis! Visualize! EXISTING NETWORK NEW NETWORK
SUBWAY CITY
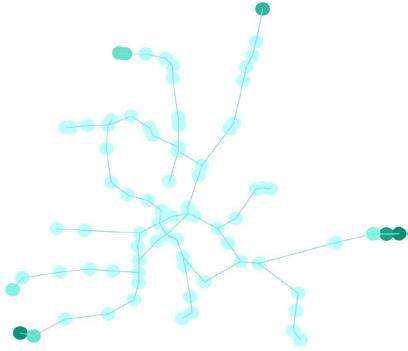
OBSERVATIONS
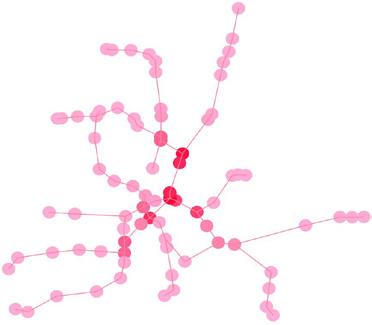
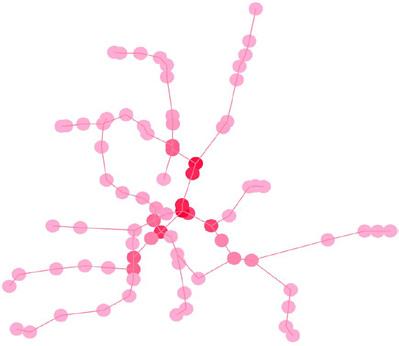
SUBWAY NETWORKS
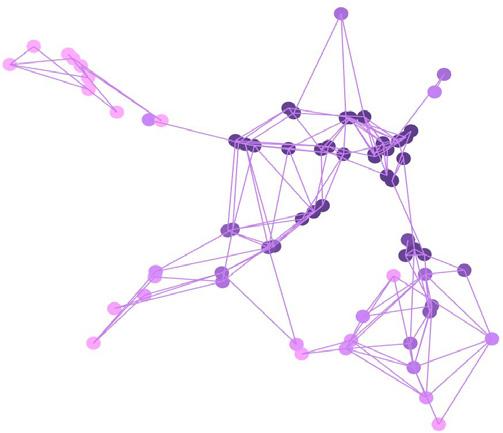
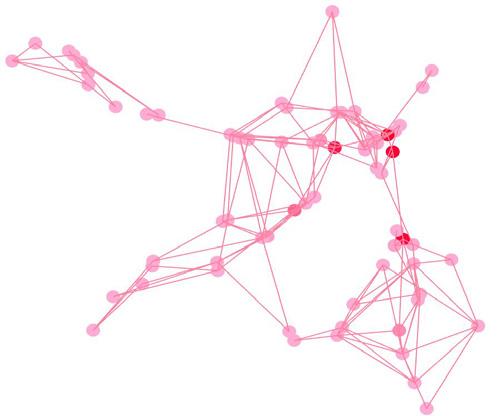

HIGHER INDEX VALUE
BETWEENNESS CENTRALITY CLOSENESS
EXISTING SUBWAY NETWORK
NETWORK 01
NETWORK 02
NETWORK 03
MUNICH SUBWAY
STOCKHOLM SUBWAY
PRAGUE SUBWAY MUNICH SUBWAY
Looking at all the graphs we can make some observations about how the proposed networks compare to the existing network. On average, we can see that the betweenness and closeness features are slightly higher in the proposed networks than in the existing network, while the meshedness is a lot higher. Network 1 has the highest betweenness score, network 2 has the highest closeness score and network 3 has the highest meshedness.
CLOSENESS
CENTRALITY MESHEDNESS

STOCKHOLM SUBWAY PRAGUE SUBWAY STOCKHOLM SUBWAY MUNICH SUBWAY PRAGUE SUBWAY
SUBWAY CITY
OBSERVATIONS
SUBWAY NETWORKS
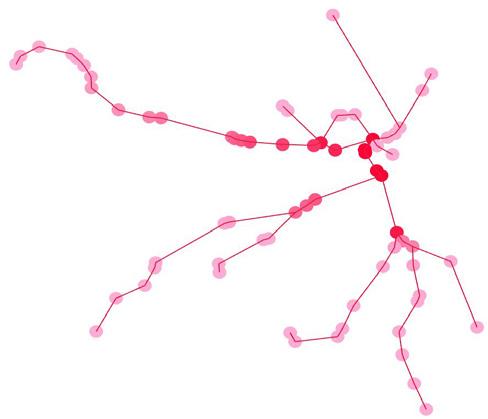
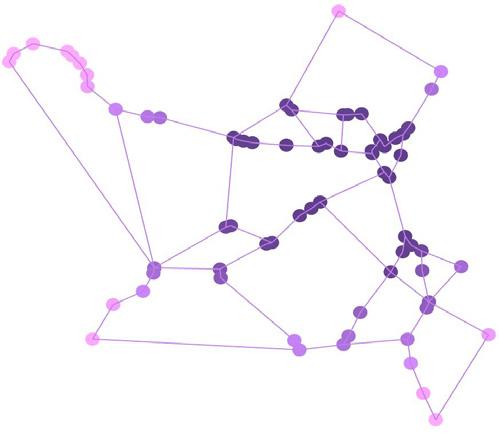
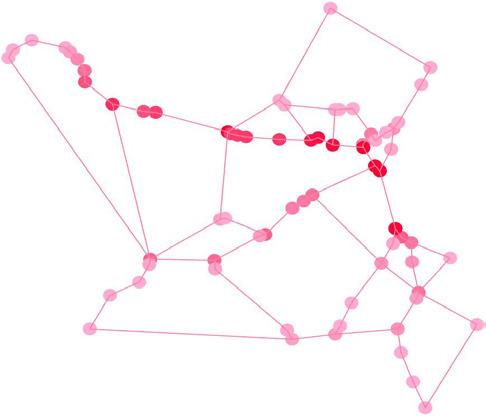
LOWER INDEX VALUE
BETWEENNESS CENTRALITY CLOSENESS
EXISTING SUBWAY NETWORK
NETWORK 01
NETWORK 02
NETWORK 03
MUNICH SUBWAY
STOCKHOLM SUBWAY
PRAGUE SUBWAY MUNICH SUBWAY
Observing the lower index values, we can see that Network 2 has the lowest betweenness score and meshedness, and network 1 has the lowest closeness score. The original networks have many dead ends and it’s clear that most of the lines converge to a central area, whereas the drawn maps do not display such a distinct central area.
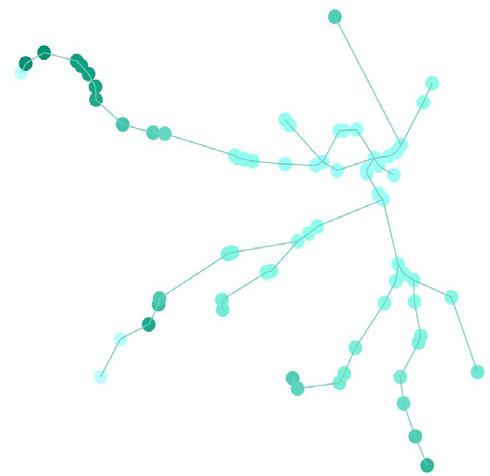
CLOSENESS
CENTRALITY MESHEDNESS
STOCKHOLM SUBWAY PRAGUE SUBWAY STOCKHOLM SUBWAY MUNICH SUBWAY PRAGUE SUBWAY
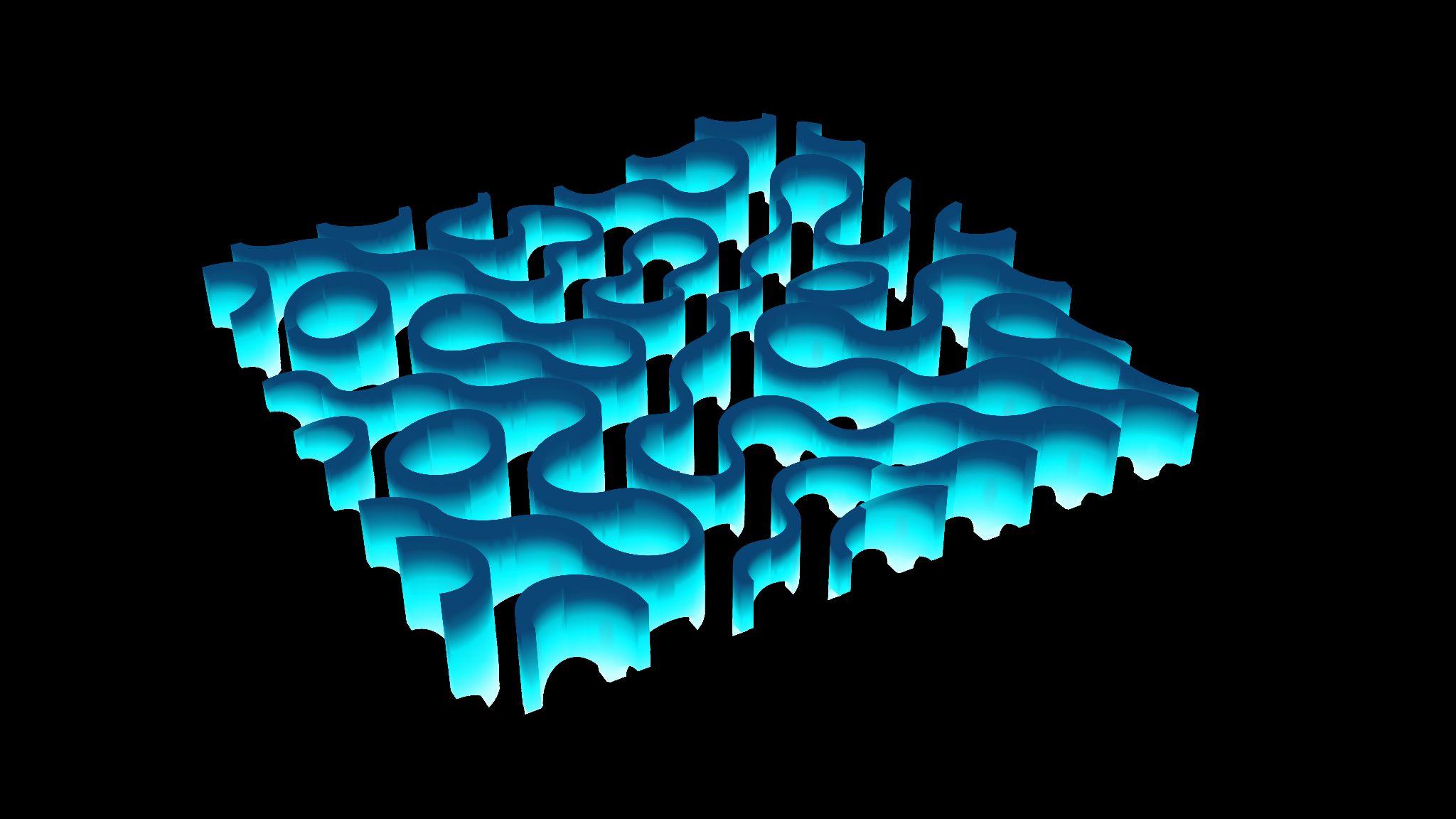
NORTHERN LIGHT PAVILION
Tools:
Pages,
Code
19 Date: 2022 Location: Lapland Collaborators: Jumana Hamdani Instructor: David Andrés León Project Type: Academic at IAAC
Rhino,Grasshopper , Hops, Rhino Compute, Rhino 3dm libraries, Github Desktop, Github
Heroku, Javascript, HTML, CSS, Visual
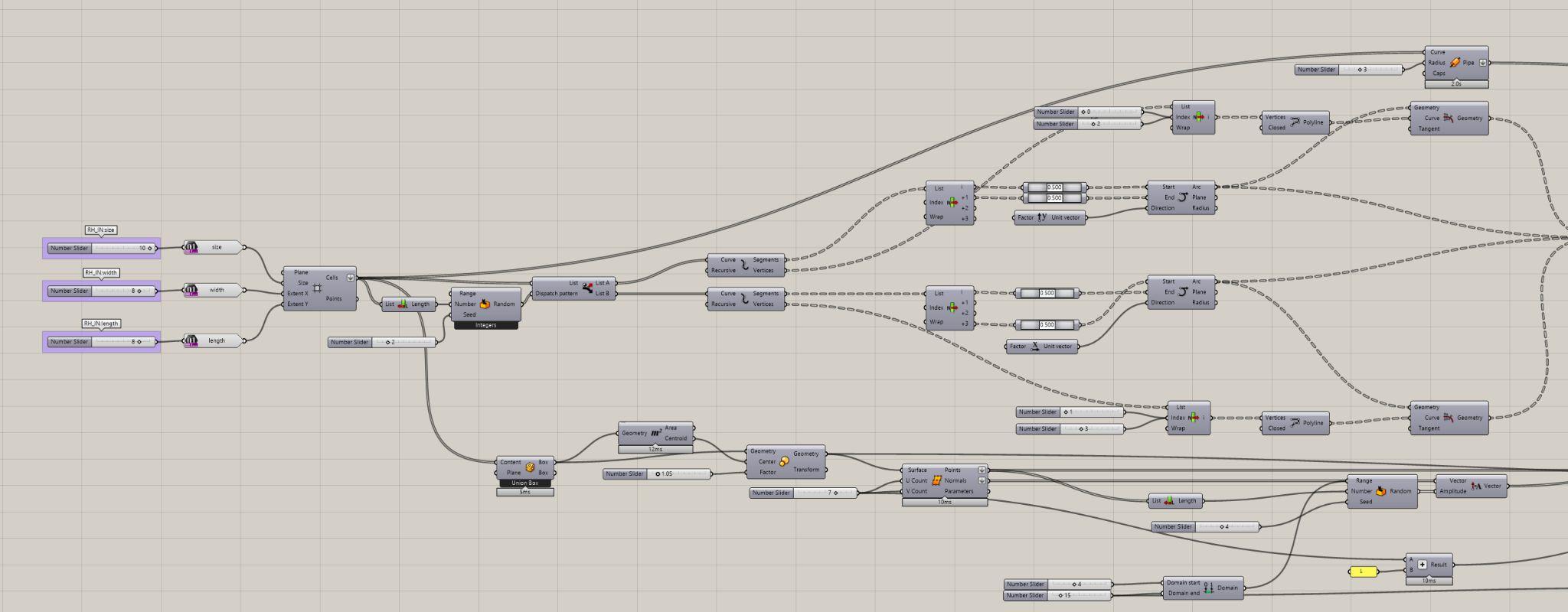
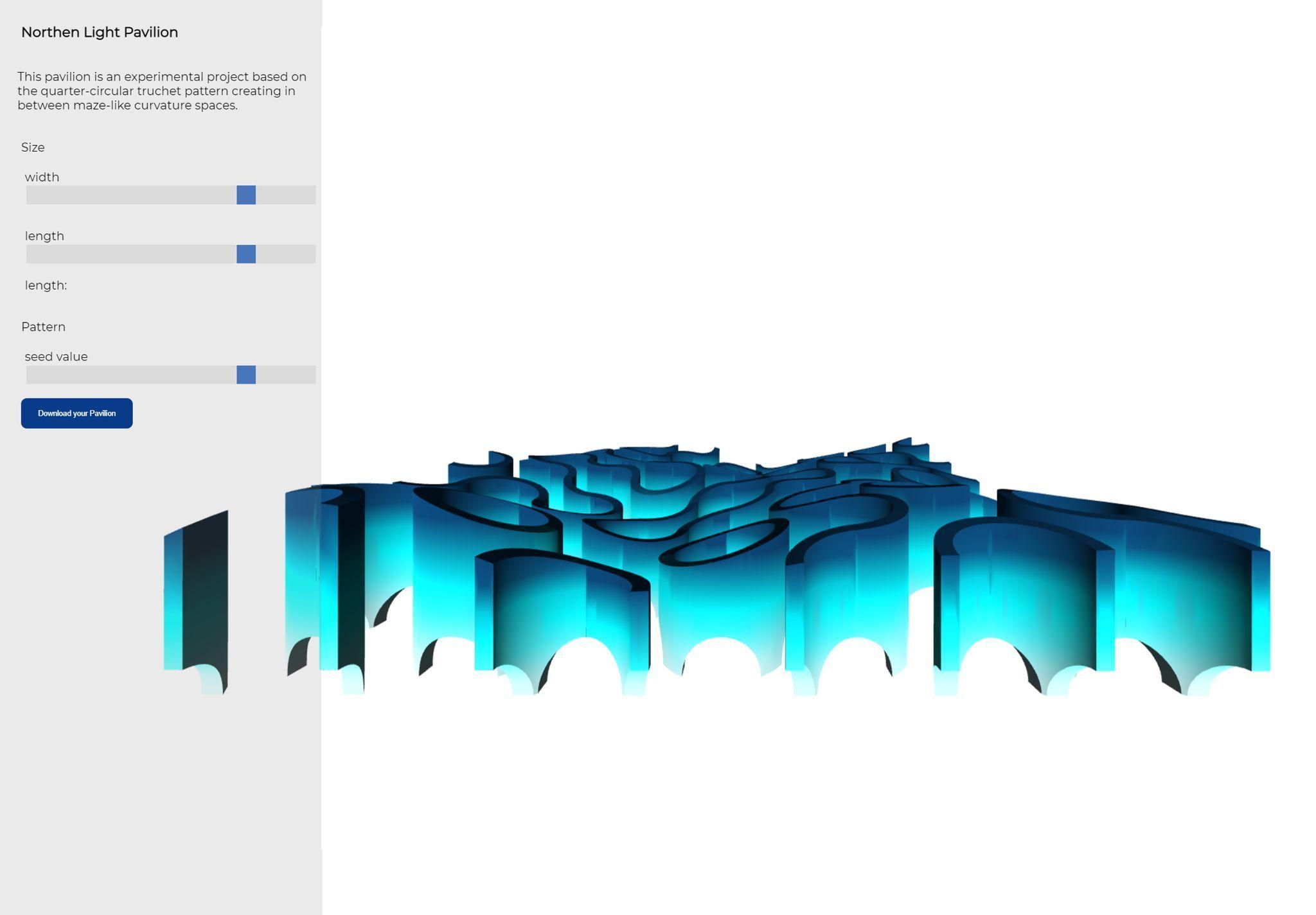
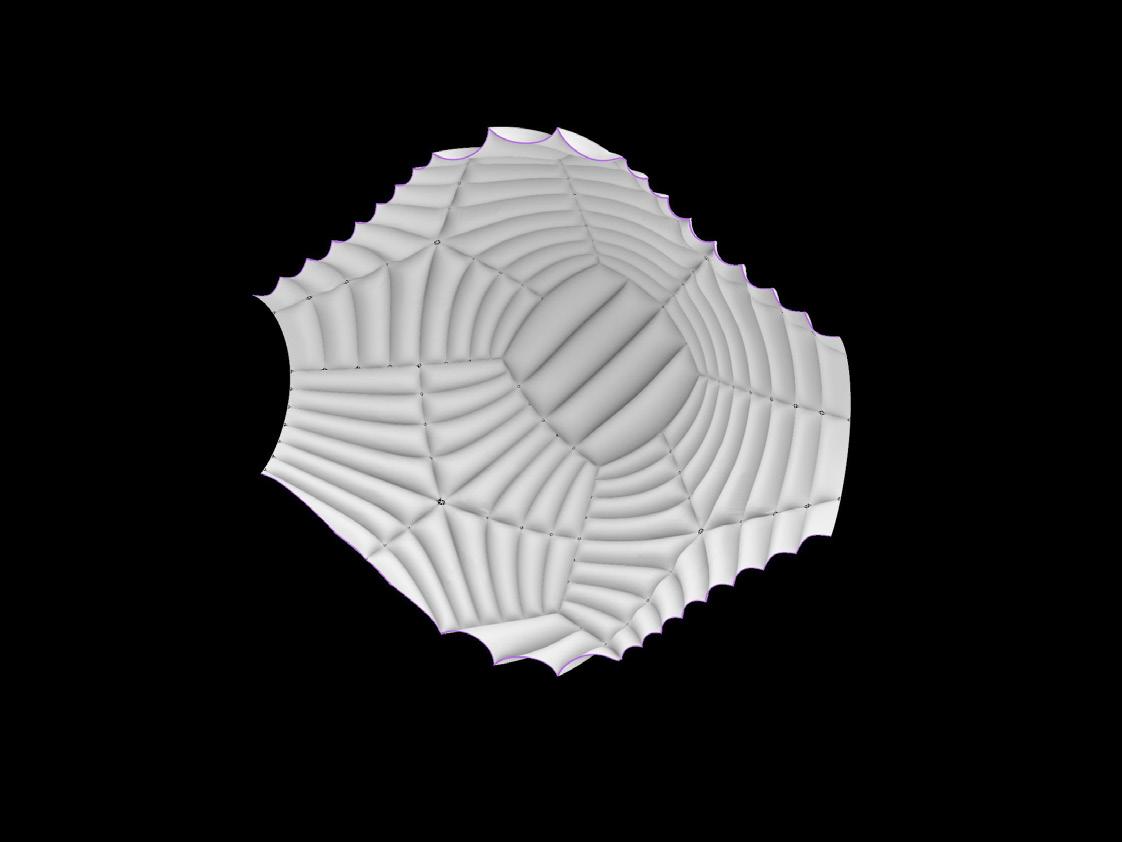
Northern Lights Pavilion is an interactive web-based application to envision a piece of contemporary urban infrastructure made of ice blocks that would activate the areas around northern cities in Sweden. The starting point of this experimental pavilion is based on the quarter-circular Truchet pattern generating in-between maze-like curvature spaces, controlled by width, length, and pattern. The aim is to envision ephemeral spaces made of ice and snow blocks, especially in the season between December-April when many artistic projects are held there.

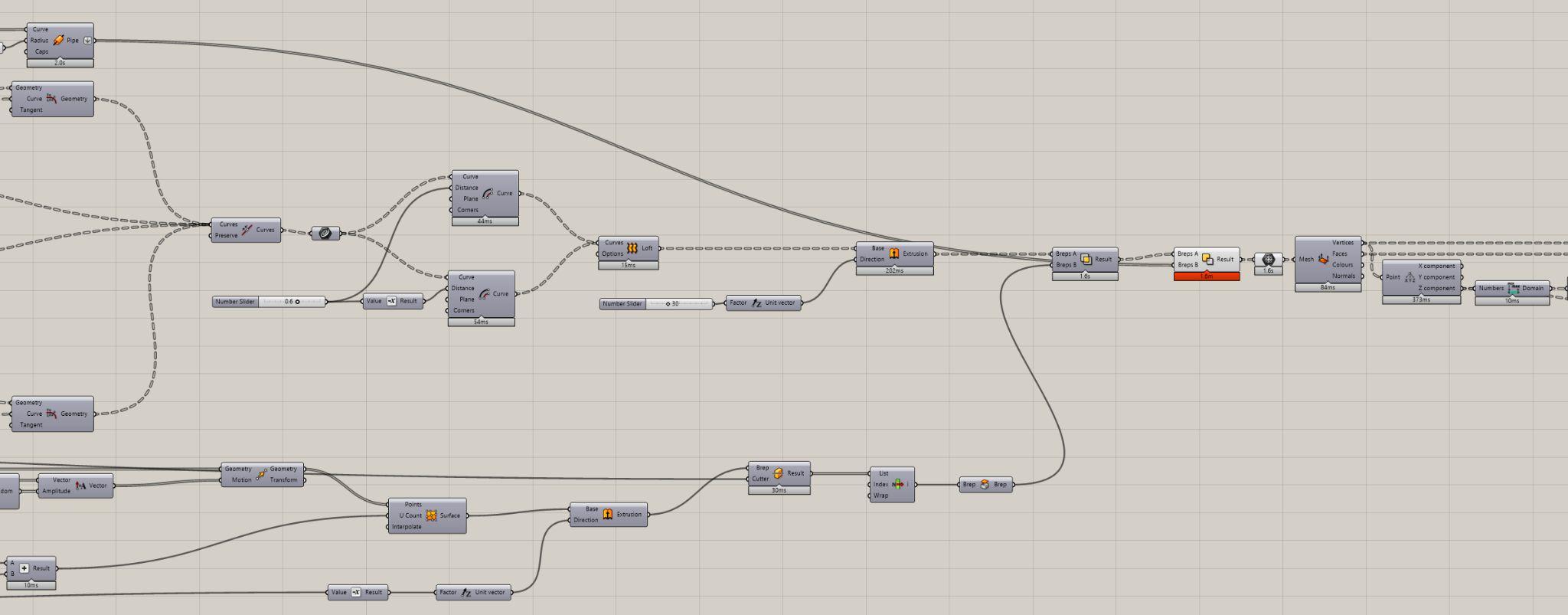



















NORTHERN LIGHT PAVILION Design Pattern Create a parametric model 1st phase Hops Data Flow Central Repo. Own Repo. Fork My files Github Desktop Clone Pull Github Desktop push Commit Github Pages Rhino.compute My definition 2nd phase Clients Rhino Compute Geometry API Server rhino 3dm Libraries Web Interface Create a Dataset Truchet Pattern














Rhino Compute Geometry Cache 3Dm Rhino file Deploy to Heroku A place to host logic and server Clients Appserver Rhino Compute Public Private Cache API My files Server Rhino 3dm Libraries Web Browser Connect to Github Iaac Server
NORTHERN LIGHT PAVILION
Instructions:
How does it work?
● First, you need to run Rhino. compute,
● Go to the App page at this link: https://jumanahamdani.github.io/pavilion/
● Change the Inputs: Width, and lengths of the pavilion, then you can input the pattern of the pavilion in the seed value based on your aesthetic preferences.
● The OutPuts would be the Geometry of the ice pavilion, where you can download it.
NORTHERN LIGHT PAVILION

The objective behind creating such an app for the municipalities of the northern area of Sweden is to introduce it to the communities of these cities as a participatory design tool to democratize the decision of creating those public spaces.
NEBULAE: ORBIT SPACE HABITAT
20
Date: 2022
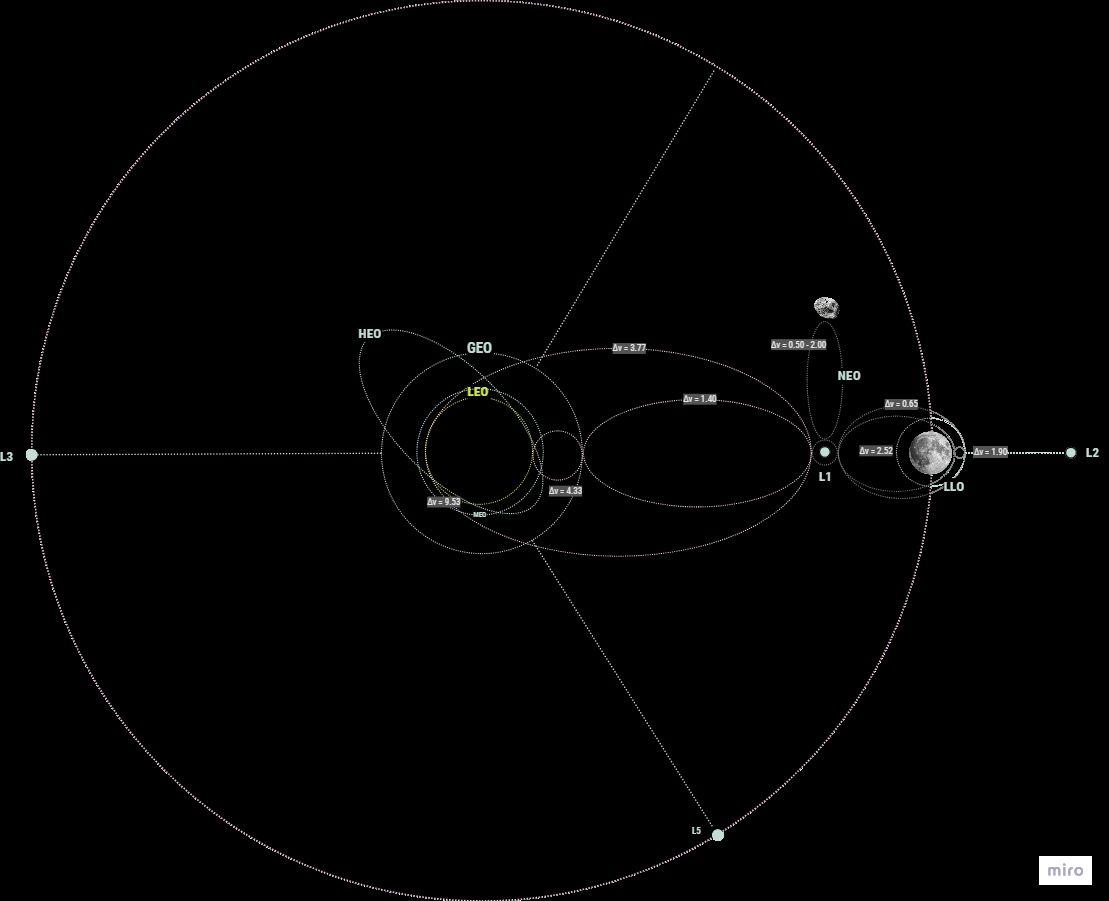
Location: Low Earth Orbit
Collaborators: Irene Martín, Jumana Hamdani, Pablo Jaramillo Pazmino
Instructor: Xavier De Kestelier, Levent Özruh
Project Type: Academic at IAAC
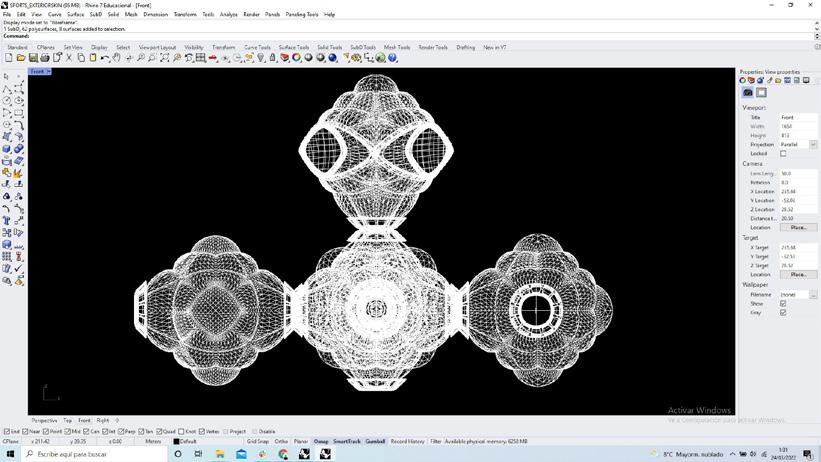
Tools: Revit, Rhino.inside Revit, Speckle, 3D Max, Photoshop, Rhino,Grasshopper including plugins: Weaverbird, Pufferfish, Human, LunchBox, GeomGym
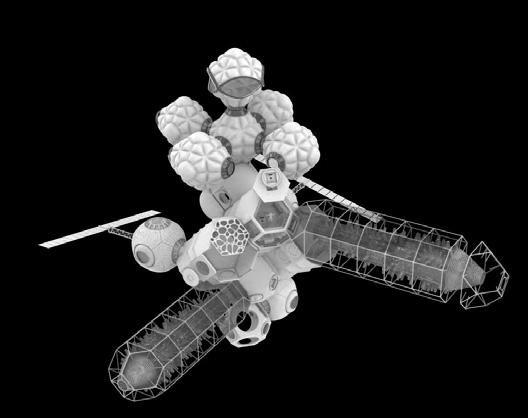
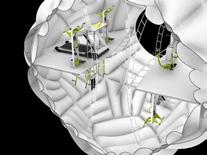
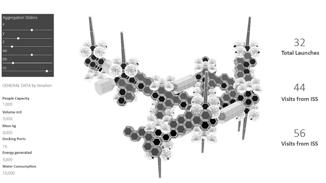
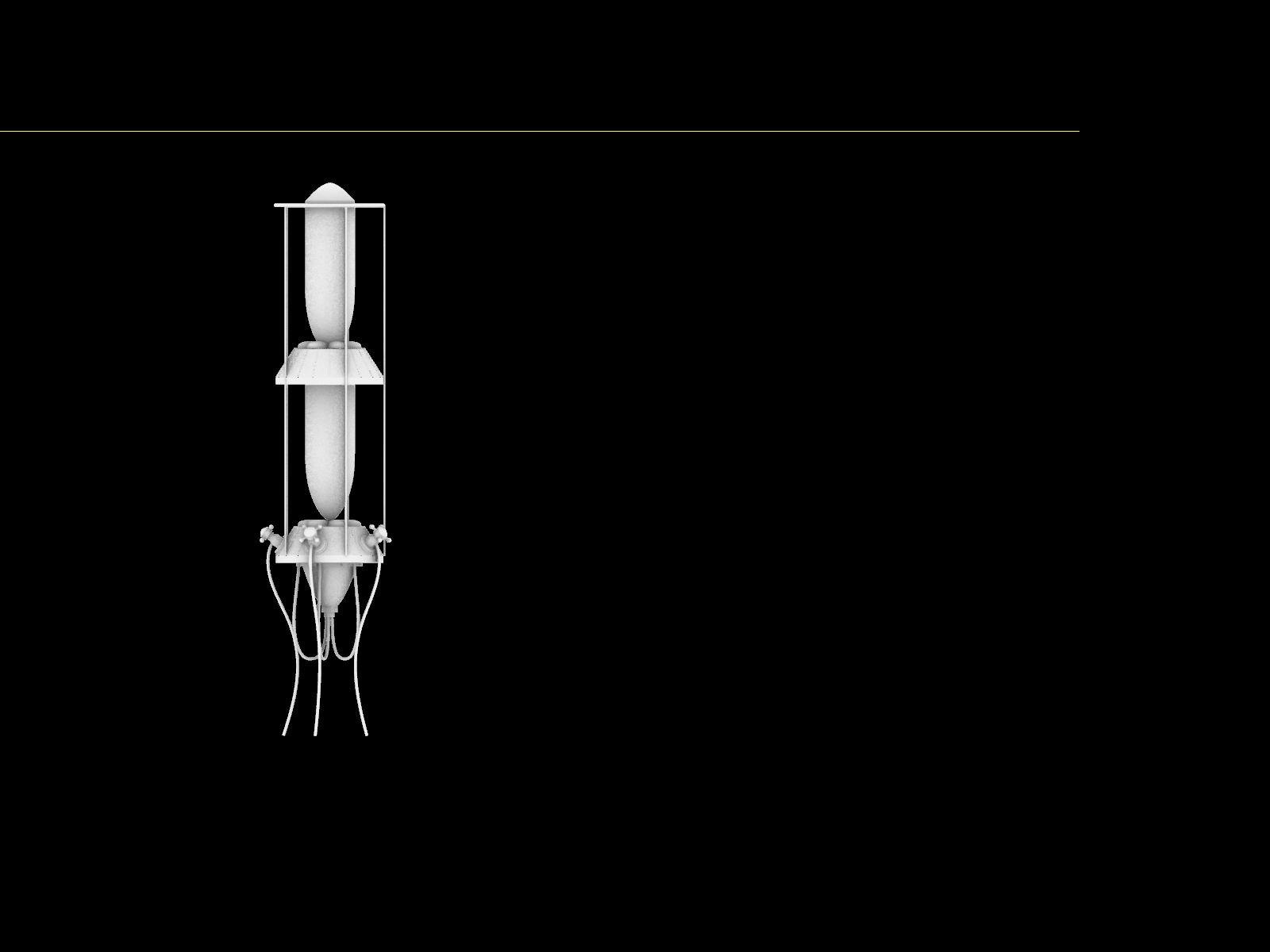
NEBULAE
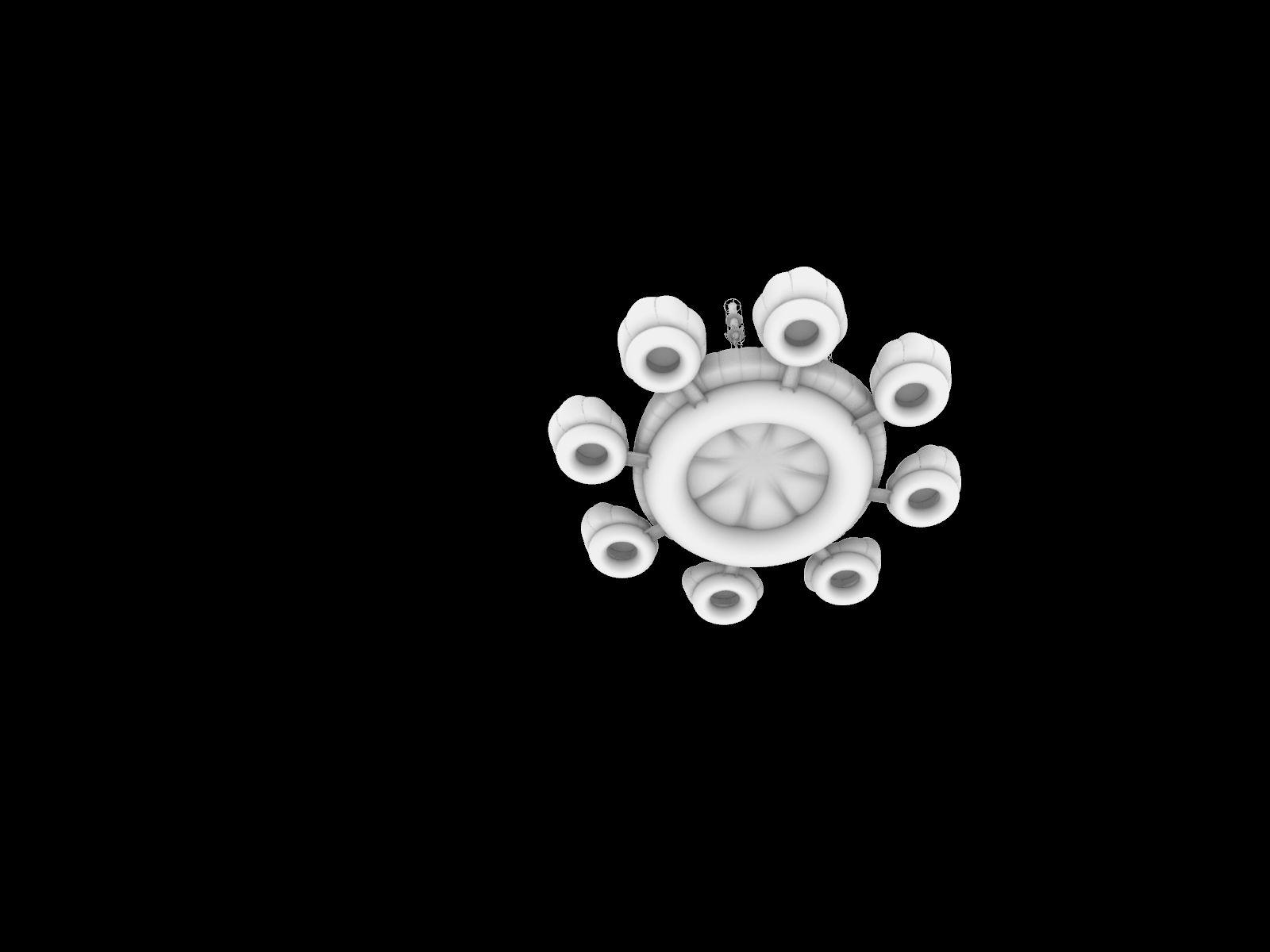
OVERVIEW
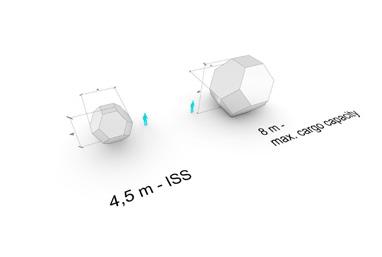
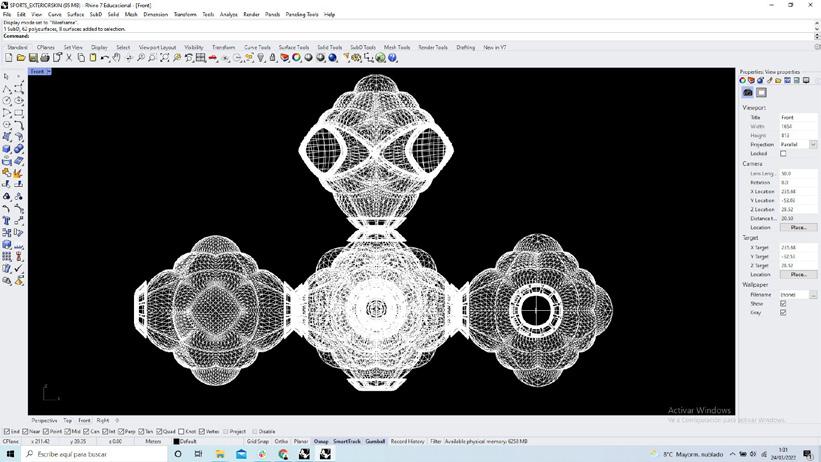
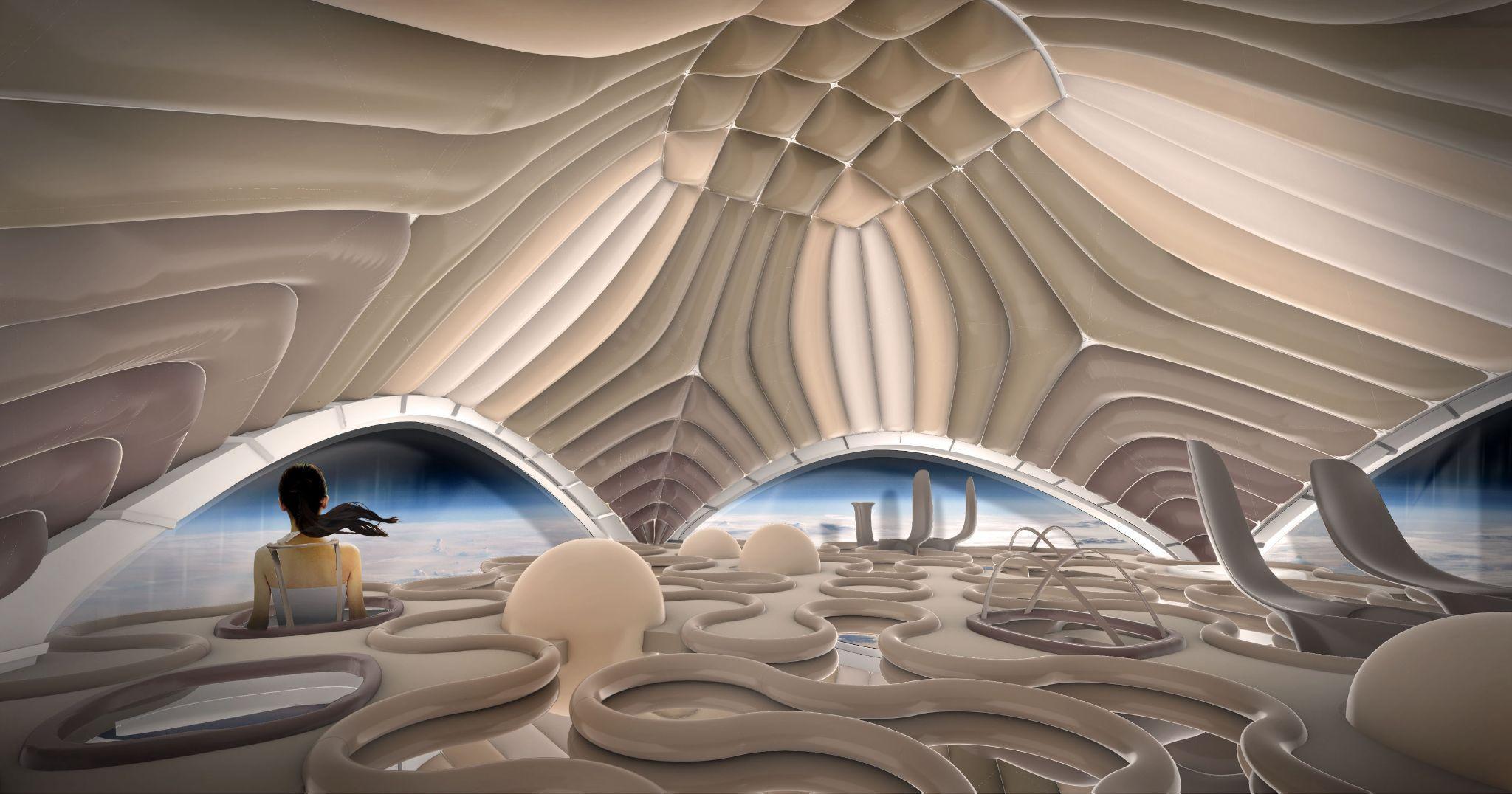
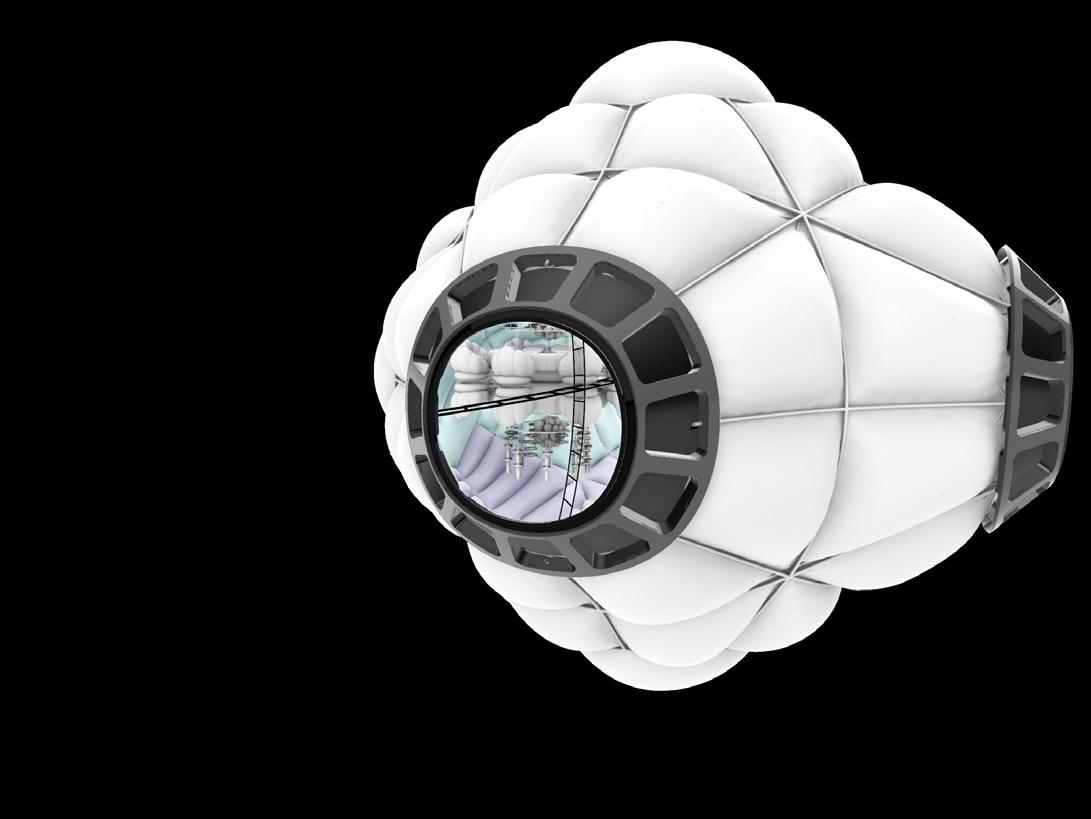
The following studio project presents the Sports and Recreation orbital space modules configuration which is part of an orbital space habitat system to be aggregated as a complete sufficient habitat. The development of the project begins with the study of the forms of exercise, recreation, the use of the interior spaces. Consequently, human ergonomics about microgravity was investigated to develop interior spaces suitable transport from the earth and later construction in space.
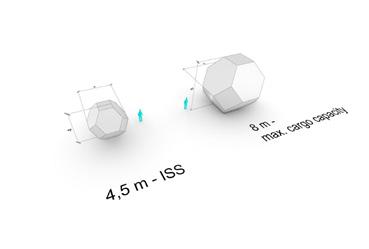
habitat proposal on the Lower Earth Orbit. The project is based on a platonic shape given by the infrastructure orbit group, to create a modular recreation, and sports that are currently practised inside the International Space Station (ISS). Then, alternative ways were studied to extend for the physics of the environment. Finally, the modules’ structural functioning, composition, and design were developed for their possible

The objective of this workflow in the Orbit Space Habitat is to present and evaluate the collaborative workflow that was followed during the course partners. The project has therefore a particular focus on this digital collaboration across design groups, software platforms, time zones and file formats. industry and in the architectural trade. Two tools that have changed the process of going from implicit to explicit representation, refining the design



















Infrastructure RECRE. Data Studio Review Gym Generating System The infrastructure team provides the rest of the teams with a constrained shape to be further aggregated in the future 20% NASA reports ESA reports PUBLICATIONS * See bibliography below DOCUMENTARIES google Pablo J. Jumana Irene NUMBERS NEEDED SPACES NEEDS ROUTINE TECH. NEEDS MODULE System Pablo generates the .gh script that will define the logic behind the modules. Tensegrity + Inflatables: From this point onwards the Greenhouse Team and the Recreational Team will be working together, having joined design sessions and sharing data RECREAT ON & SPORTS team Origami folding for fast inflation The Recreation & Sports Grand the Working Group share between each other their .gh scripts for inflatable structures and SubD interiors Tensegrity structure that helps maintain the internal and external shape 2 Pablo J. Jumana Irene 2 3 Inflated skin, using the tensegrity lines and the hatches as constraints 40% Pablo J. 1. Furniture 2. Inner Skin Pablo J. 3. Outer Skin MODULE System Pablo provides Jumana and Irene with the outer and inner skin. Irene Pablo and Jumana fill in each one of the modules. 50% Casino Meditation Connector Gym Casino Meditation Connector Pablo J. + JUMANA + IRENE Pablo J. Irene Jumana Pablo J. Irene Jumana GREENHOUSE Data Pablo jacinto chatbel NEBULAE
course of the module, in the search of effective patterns and strategies that enables successful data sharing and interoperability between project formats. At the core of the collaborative process are Speckle and BIM, two softwares that are currently at the center of the discussions in the AEC design through continuous input from engineering, environmental, cost and fabrication constraints.









MODULE PLANS MODULE RENDER Aggregation Draft MEDITATION CASINO MODULE INTERIOR DESIGN The interior design depends, mainly, on the furniture design which is made with Rhino. The elements that are attached to the interior walls are informed by the module’s shape. Once defined and reviewed with the Faculty, the design phase is closed. Studio Review Studio Review Studio Review Interior des gn INDIVIDUAL PLANS As part of both the Integrated Modelling and Studio final submission, Jumana, will coordinate both the production of plans (section, elevations and technical plans) and the production of renders. REC. AGGREGATION The final aggregation, established from the very beginning, will show the final result for the modules. GYM MODULE 70% MACAD FACULTY INPUTS GUEST FACULTY INPUTS MODULE PLANS MODULE RENDER MODULE PLANS MODULE RENDER FINAL PLANS FINAL RENDER JUMANA PABLO J. irene. 80% 90% Orbit Aggregation PROPOSED AGGREGATION The Recreational and Sports Group will make sure that the provided modules work properly within the joint aggregation. For this purpose the group will provide the following: 1. Basic Geometry for each Module 2. Basic Geometry for the Aggregated Modules 3. Basic numbers for each of the modules, including the number of inhabitants, the energy consumption, etc. 90% FINAL PLANS FINAL RENDER The recreational & Sports Group will be in charge of producing the final axonometry and render for the Orbit Team RESEARCH PHASE DESIGN PHASE CLOSING PHASE PRODUCTION PHASE
Workflow
RECREATION
Studio
SPORTS AND
group


















NEBULAE Infrastructure Team Research Data Studio Review Other Teams Studio Faculty Living Group Draft Render nfrastructure Generating System 10% PRODUCTION ROUTINE RECRE. Data green Data work Data living Data TECH. NEEDS PEOPLE NEEDS SPACES NEEDS From this point onwards the Greenhouse Team and the Recreational Team will be working together, having joined design sessions and sharing data GEOMETRICAL CONSTRAINTS The Infrastructure Team provides the rest of the groups with ‘platonic solid’ to begging with the design phase. 20% The infrastructure team provides the rest of the teams with constrained shape of their choice to be further aggregated in the future by the rest of the groups. Draft Plans Interior design Draft Render Draft Plans Interior design Rec. Group Draft Render Draft Plans Interior design MODULES DEFINITION Green. Group Interior design SEE ZOOM IN THE OTHER PANEL 50% Crops and Design Data





Final Render Studio Review Studio Review RESEARCH PHASE DESIGN PHASE CLOSING PHASE PRODUCTION PHASE Draft Render Draft Plans PANEL Studio Review Studio Review AGGREGATION DRAFT The Infrastructure Team provides the rest of the groups with a ‘platonic solid’ to begging with the design phase. 60% Final Aggregation Salva and neil. JUMANA, PABLO, IRENE CHARBEL JUMANA, PABLO, IRENE CHARBEL Arch. Plans Axonometric Interactive Web Configurator ALL TEAMS. ALL TEAMS Studio Workflow Orbit Space Habitat group
NEBULAE
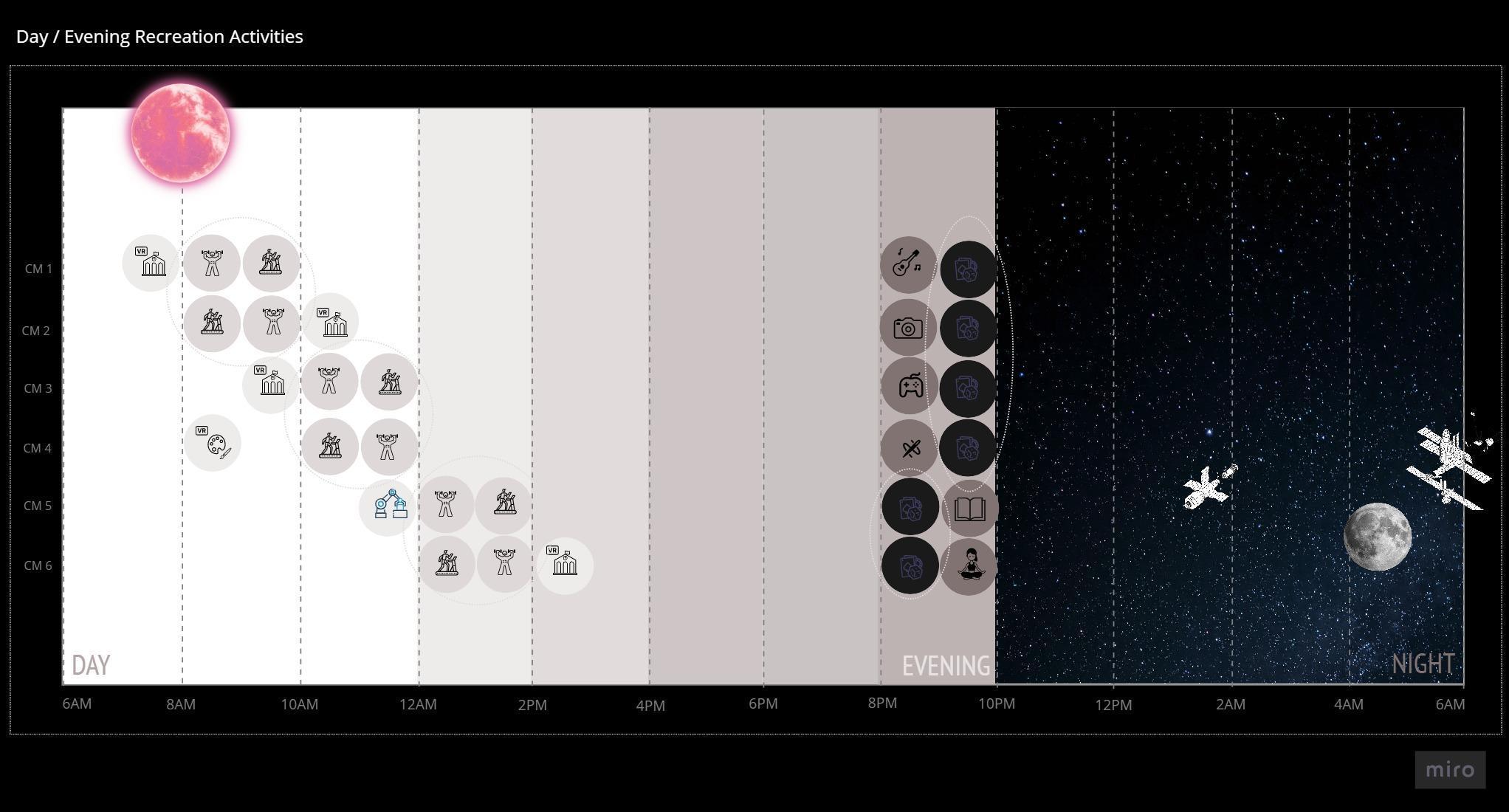
SLEEP WORK EAT PARTY REPEAT
MODULE FUNCTION PROGRAMME
The system presents the connection between the research and the functionality of each of the modules, and a schedule of activities that can be performed inside them. Similarly to what NASA does for Astronauts, we determined certain activities about time and use. Introducing now, SLEEP – WORK – EAT –PARTY – REPEAT

SPORTS YOGA CASINO VR GAMING
c
Reading + AR Visuals

 Gaming + Sports Exercise Casino Meditation
Gaming + Sports Exercise Casino Meditation
NEBULAE

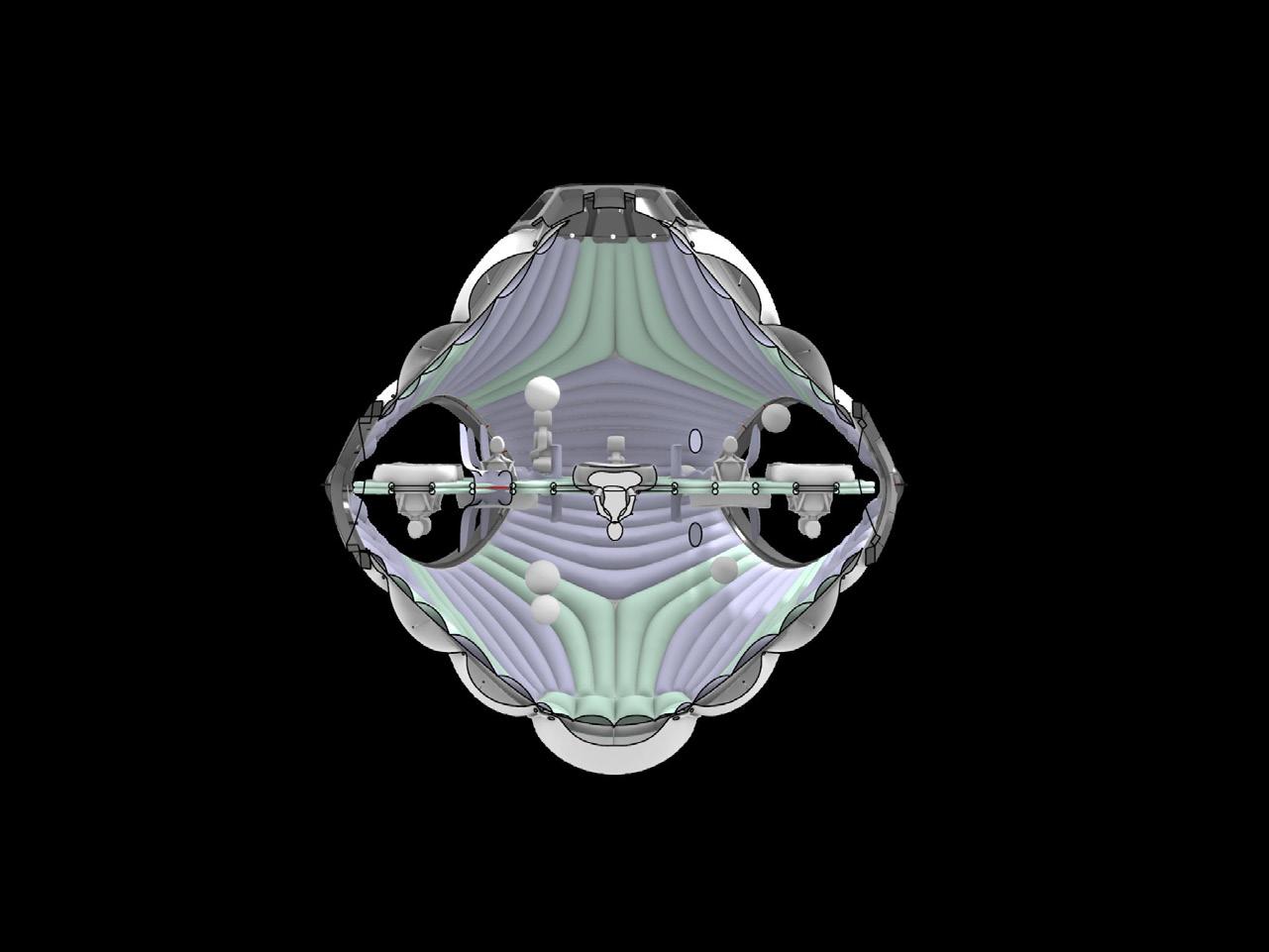
Nebulae: Orbital Space Habitat

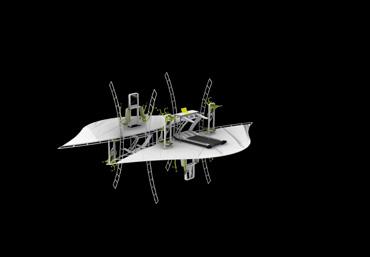
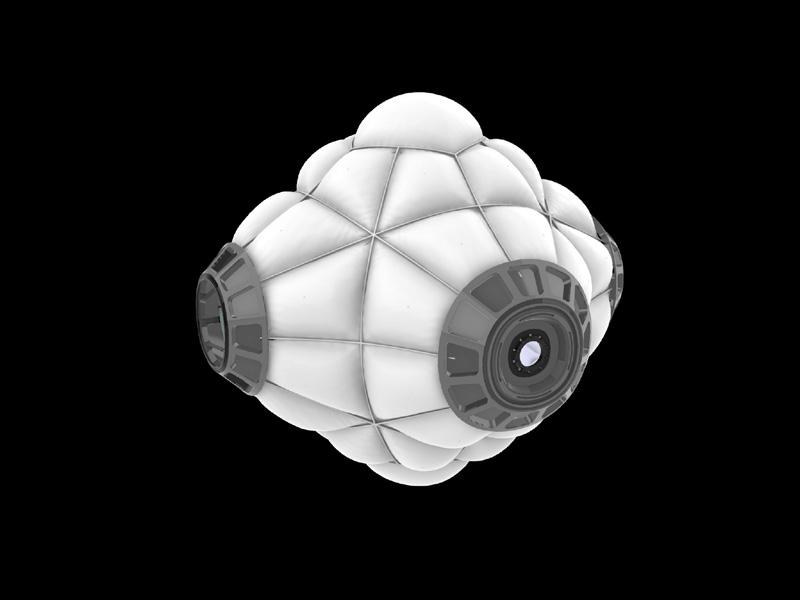
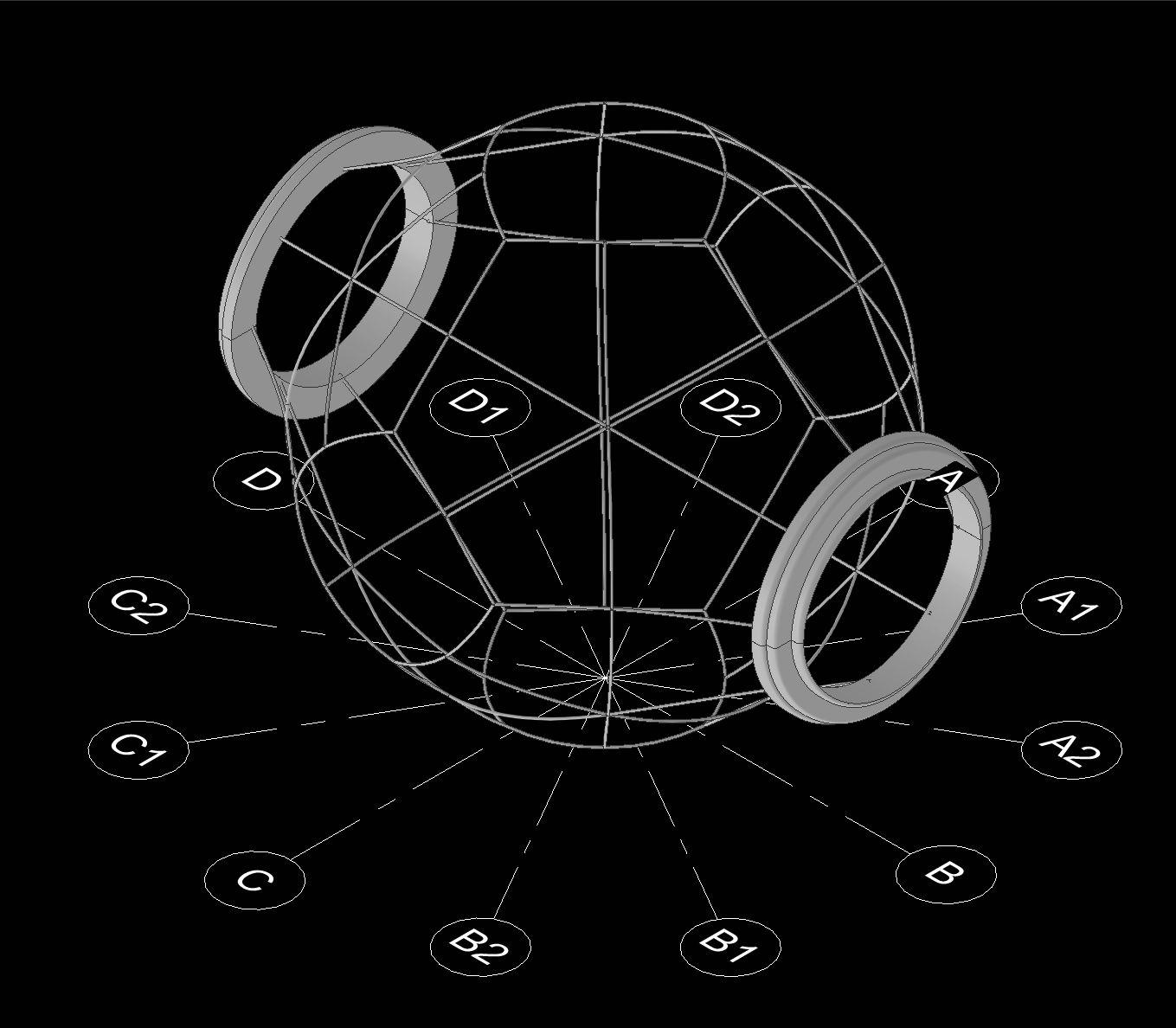
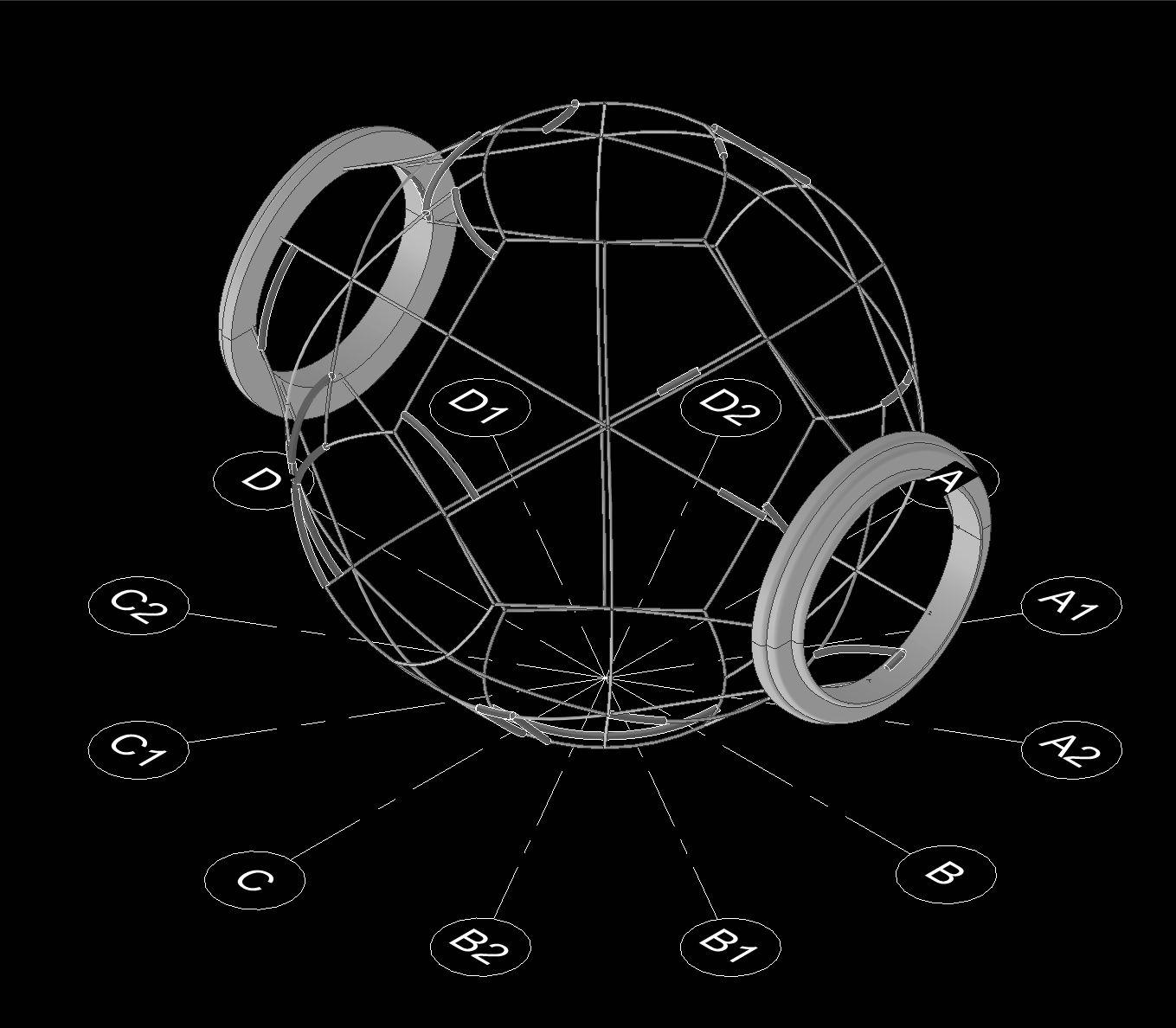
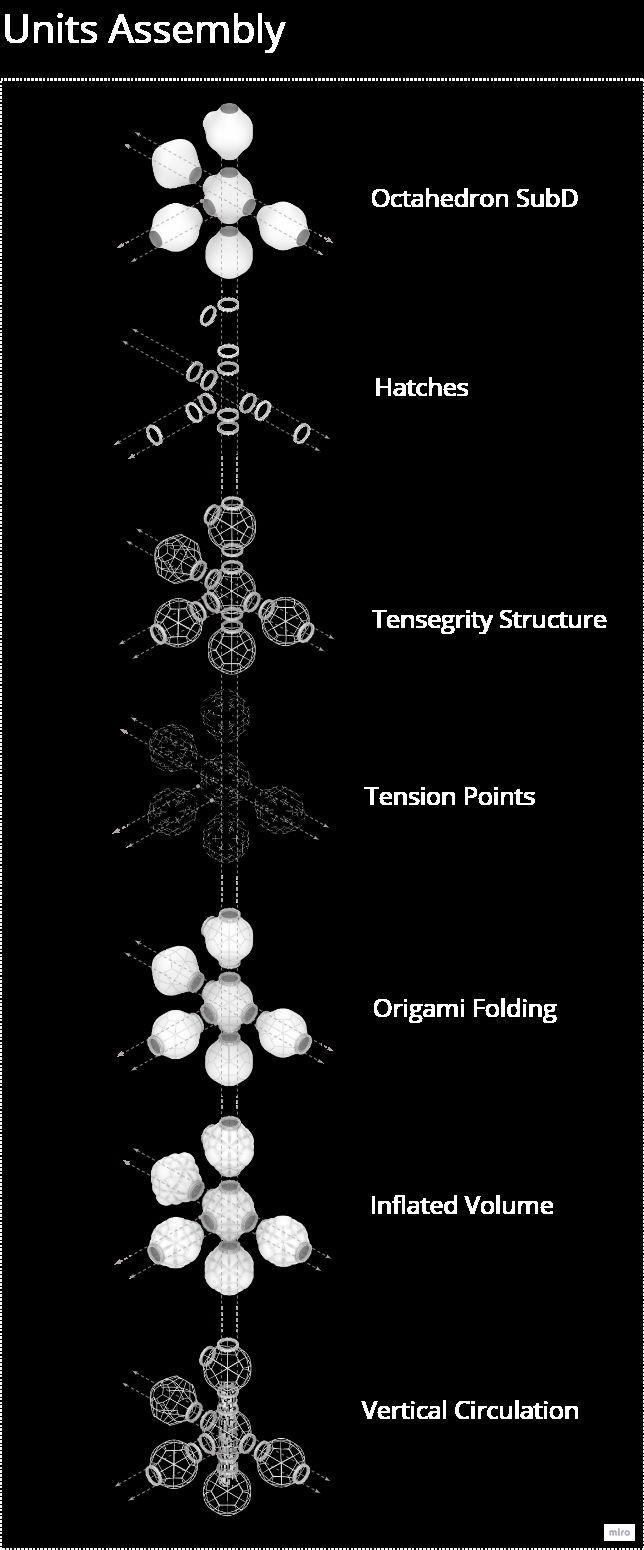
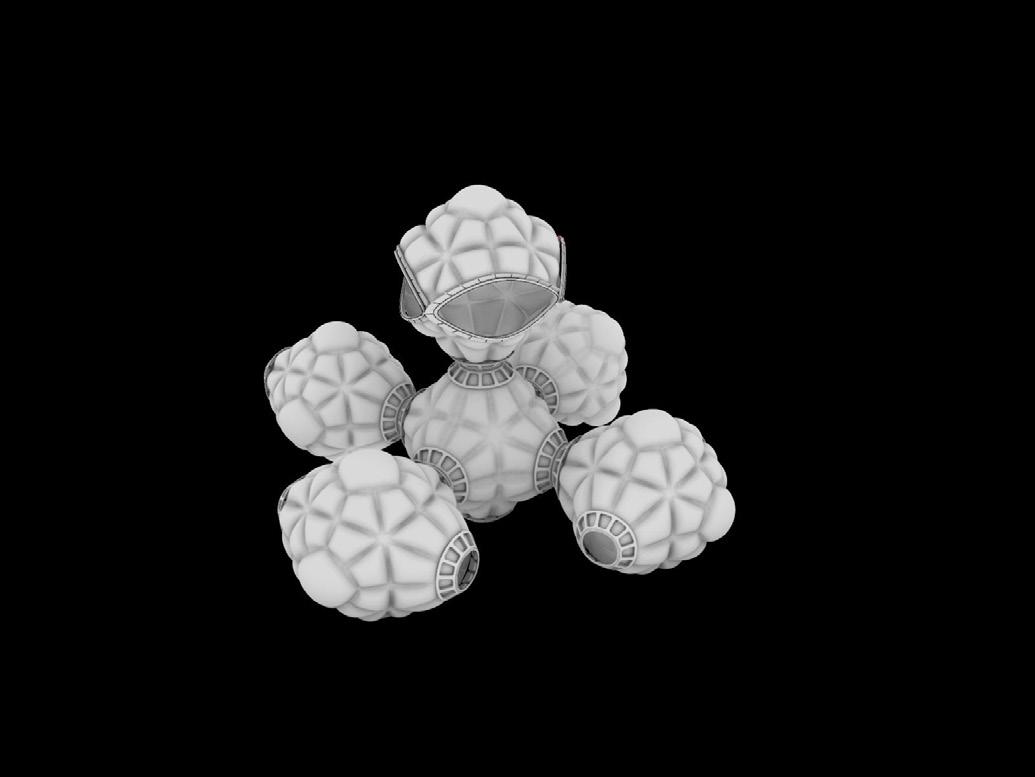
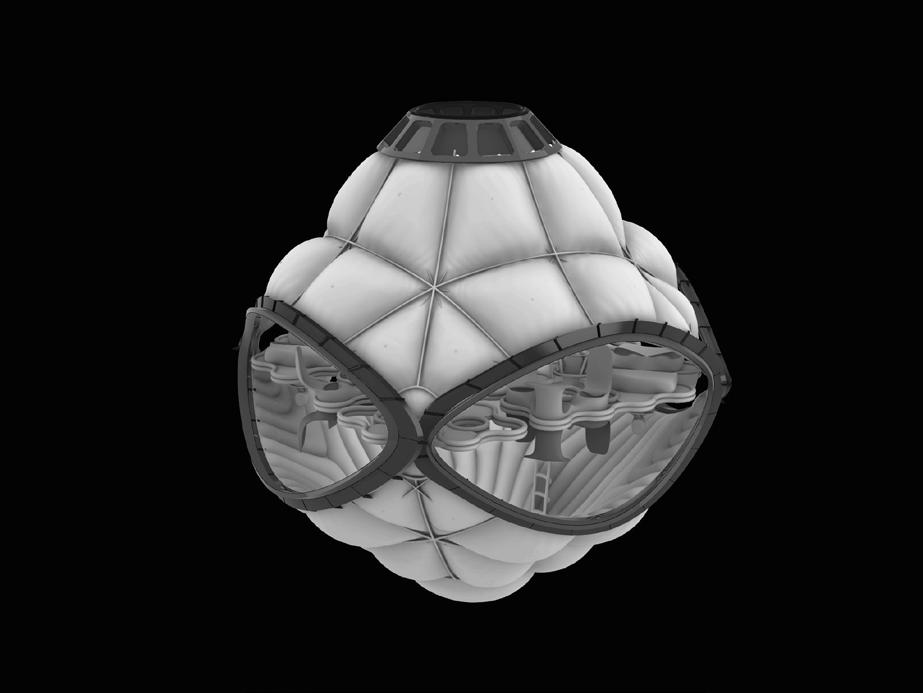
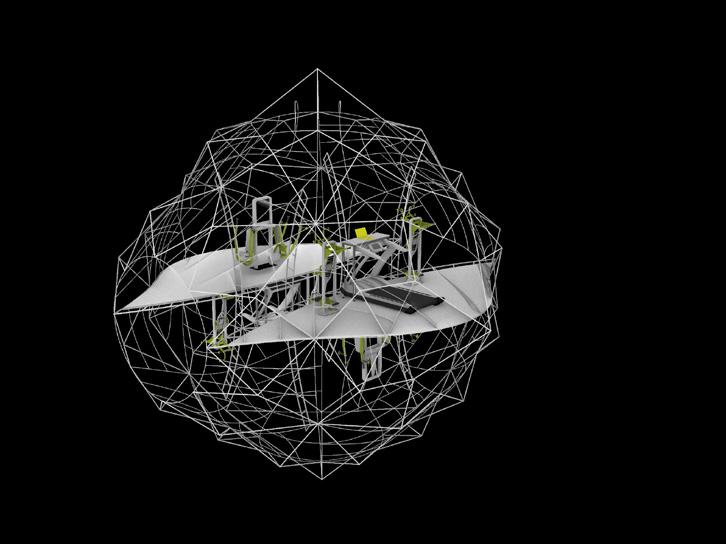
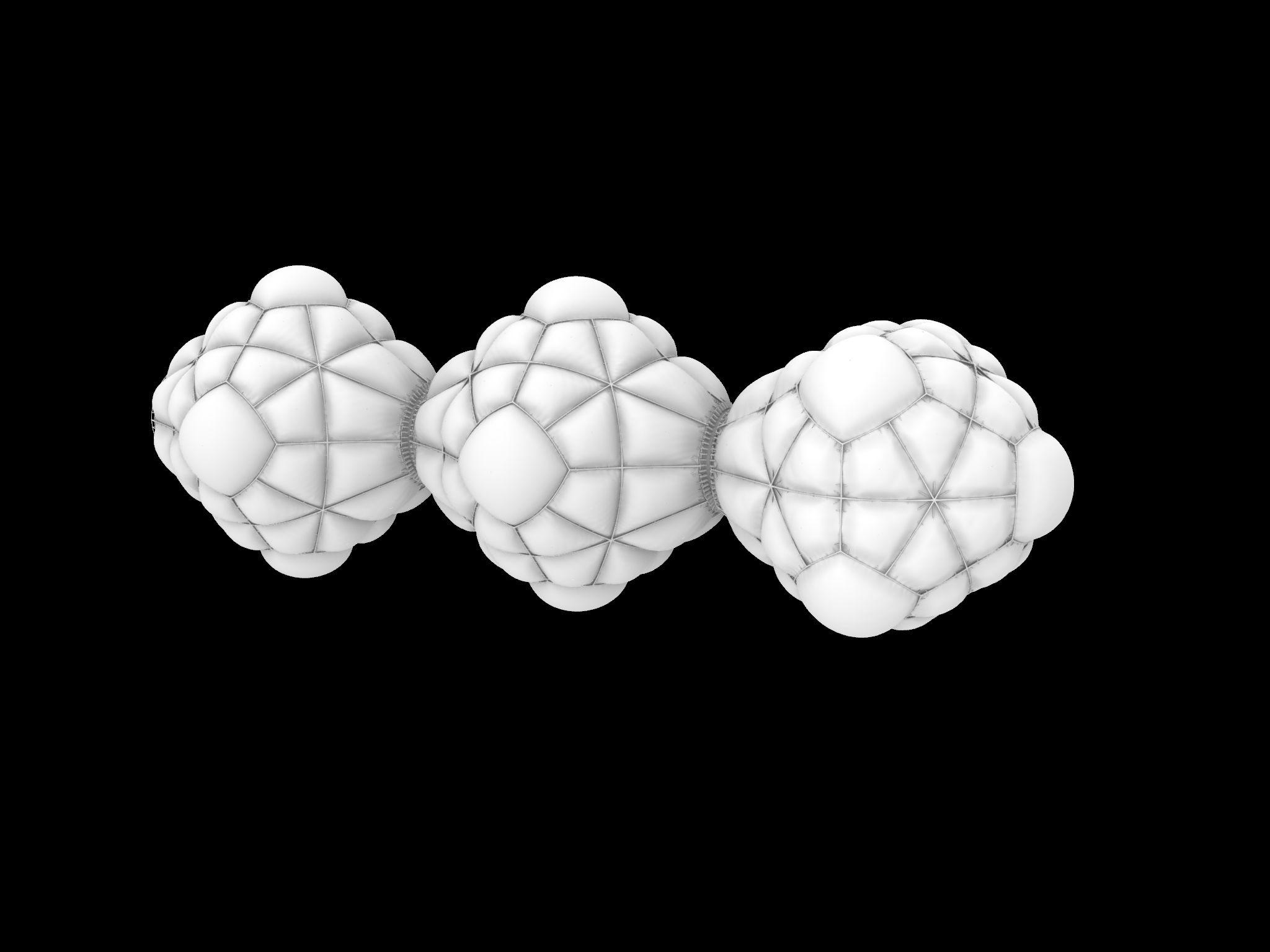
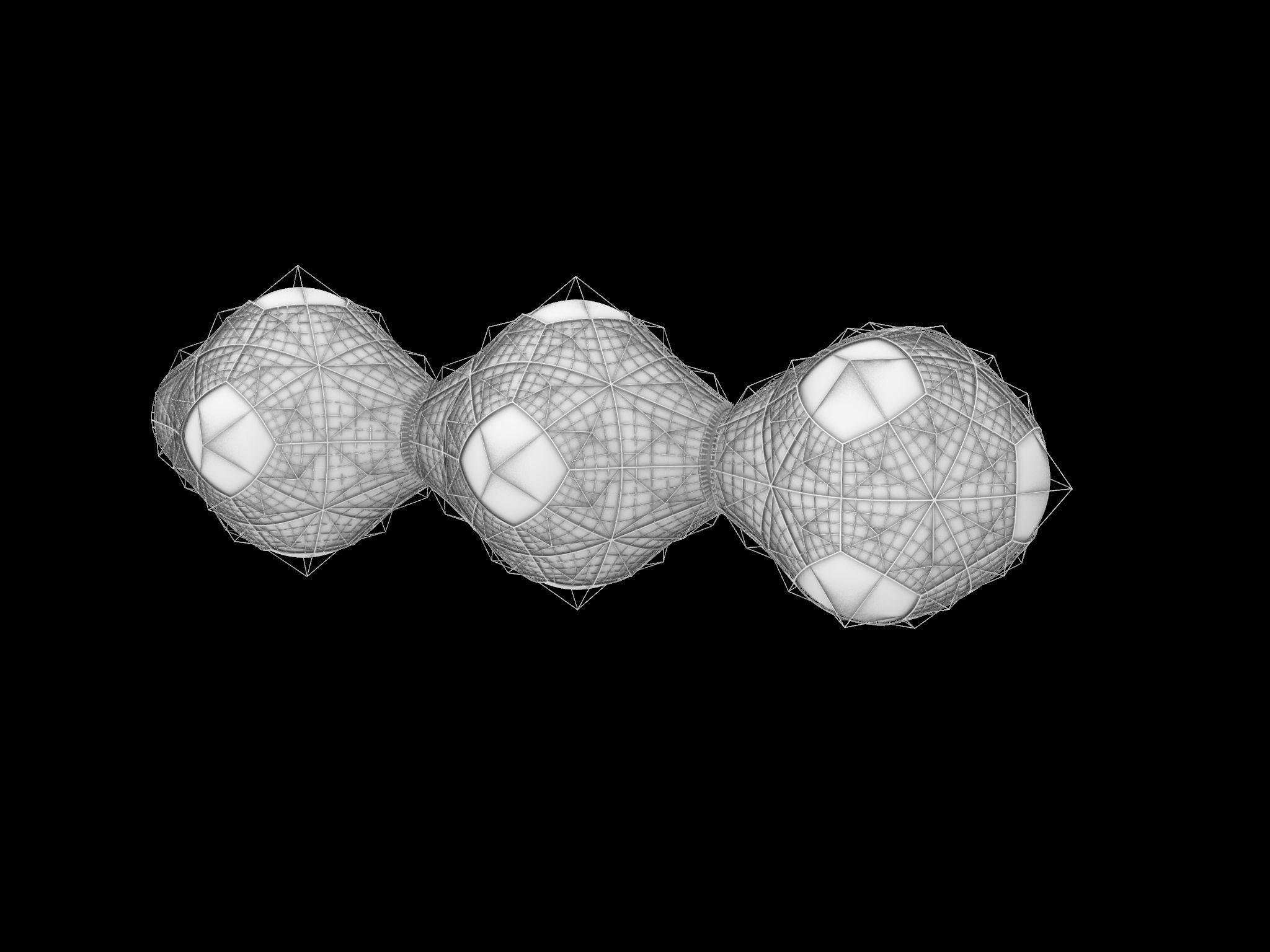
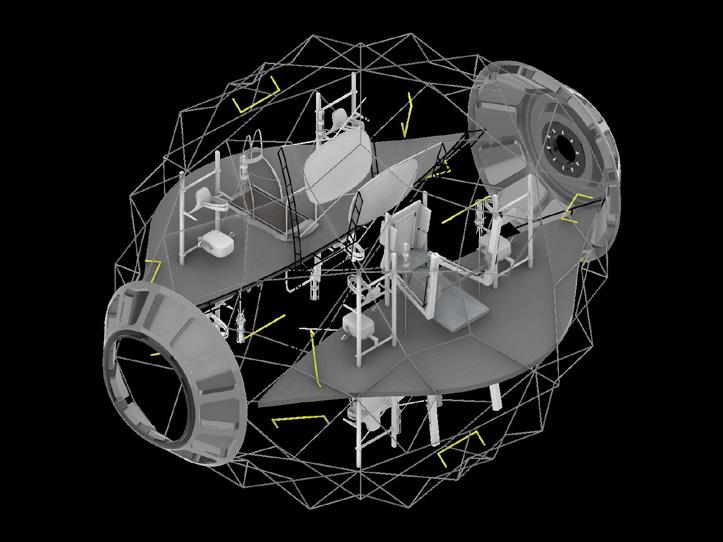
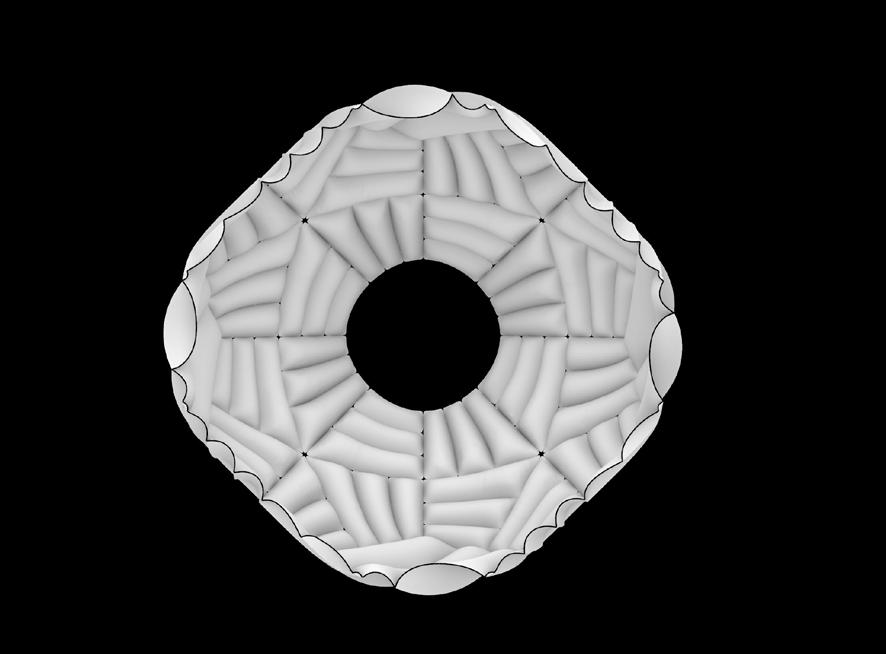
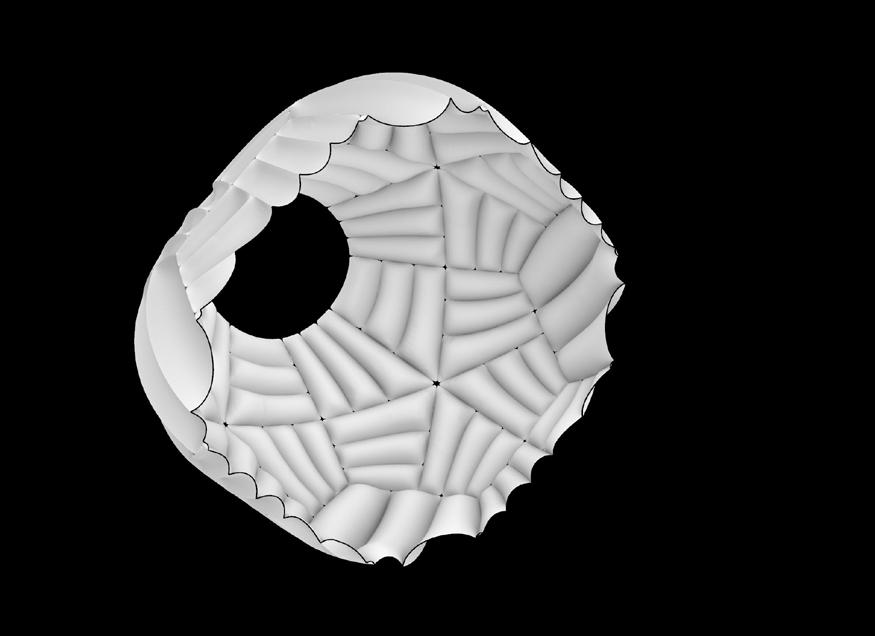
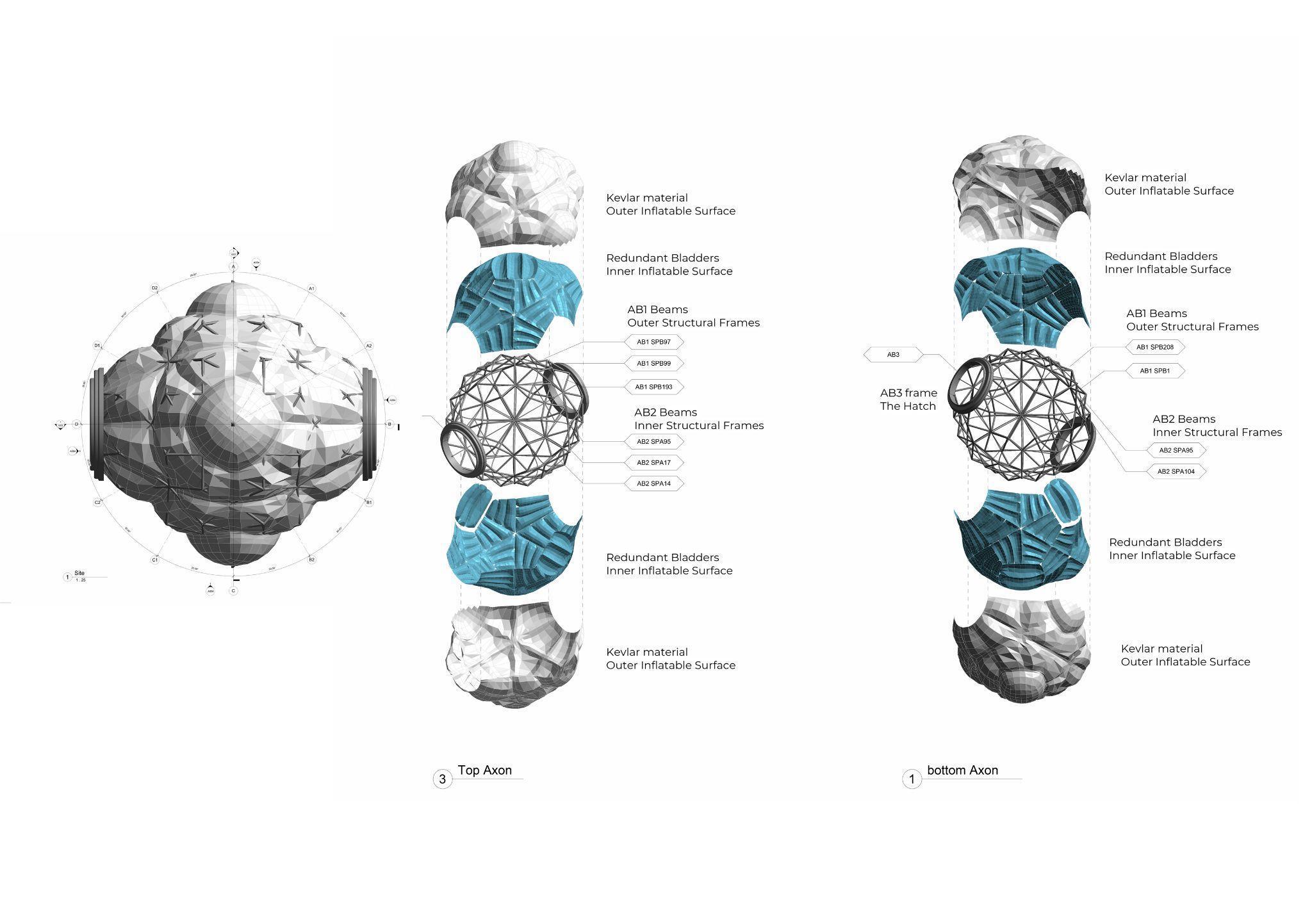
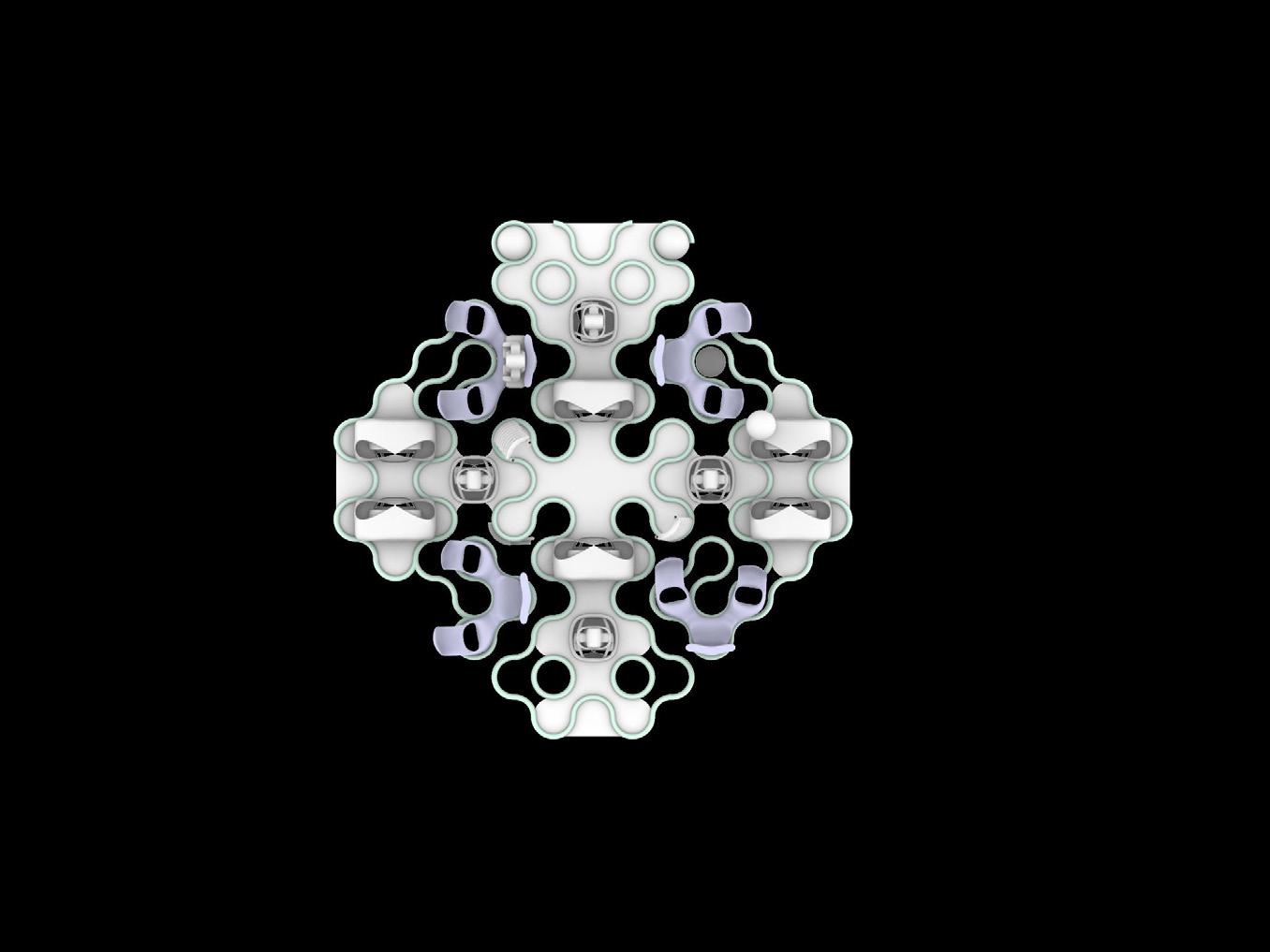
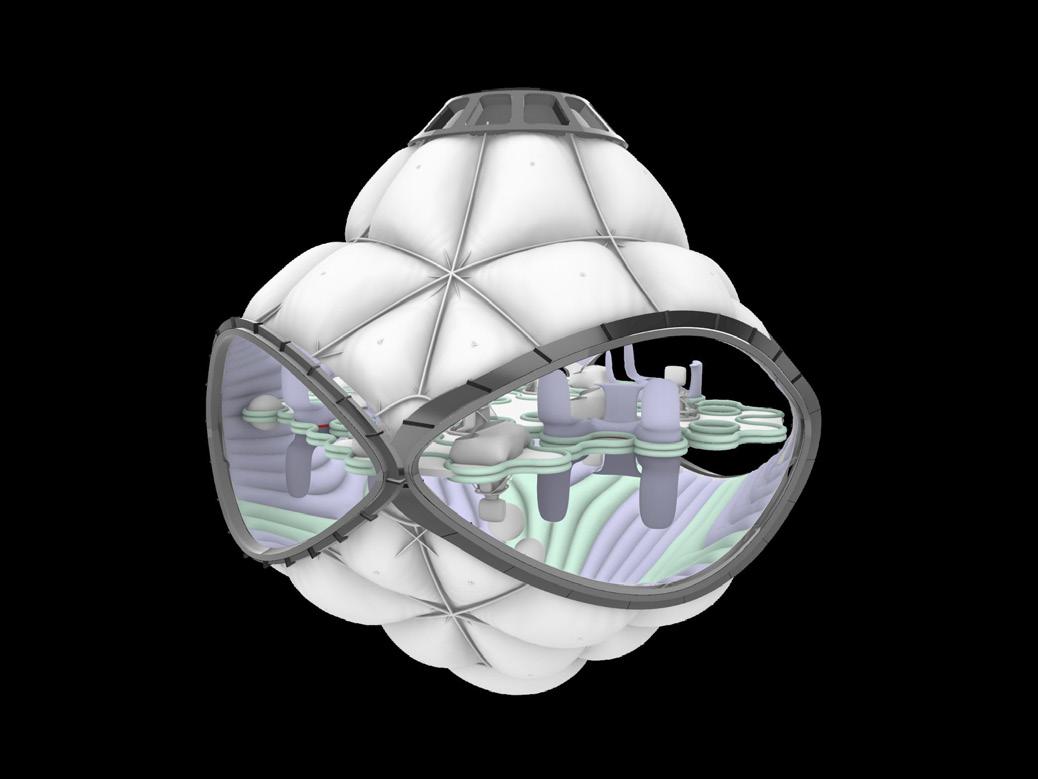
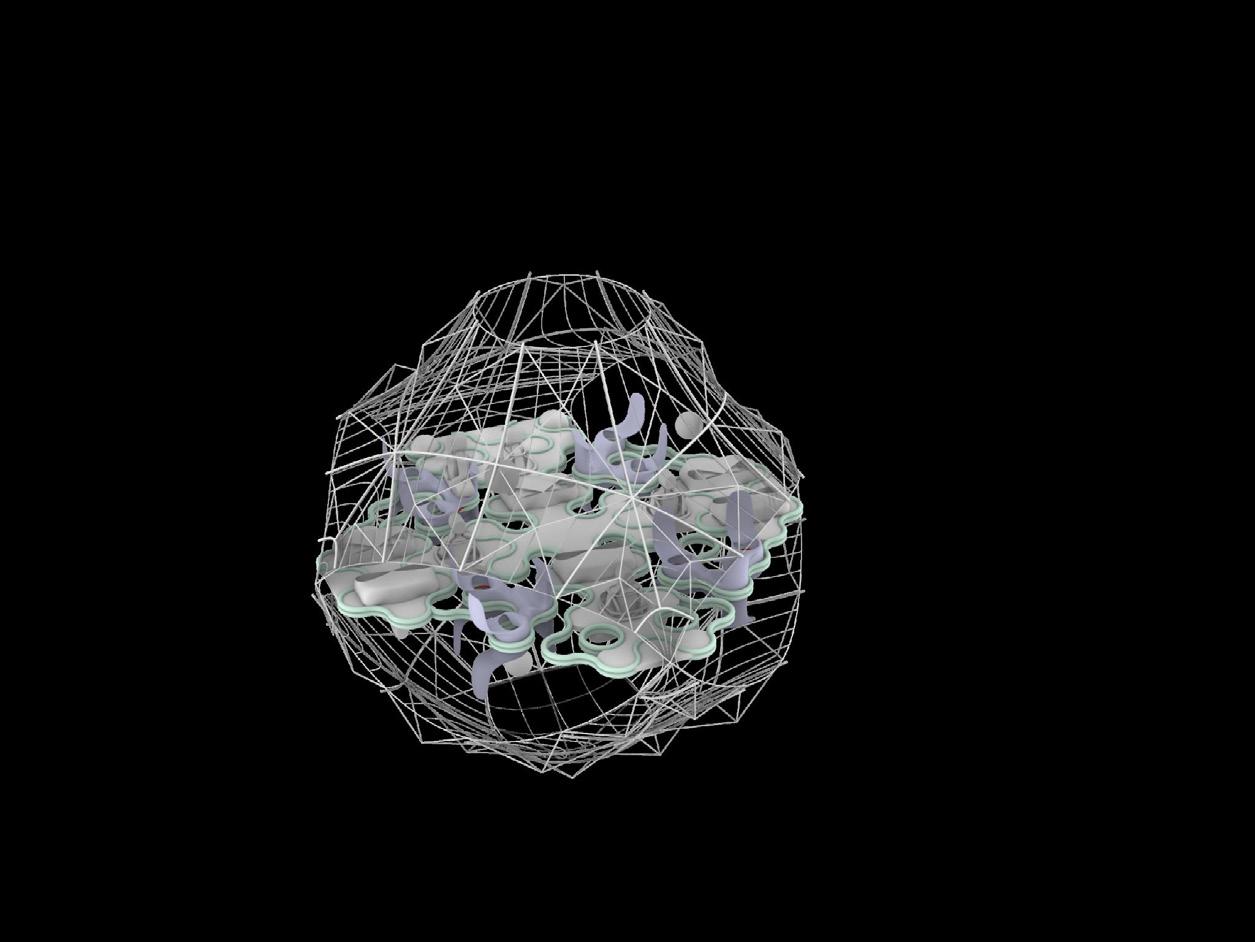
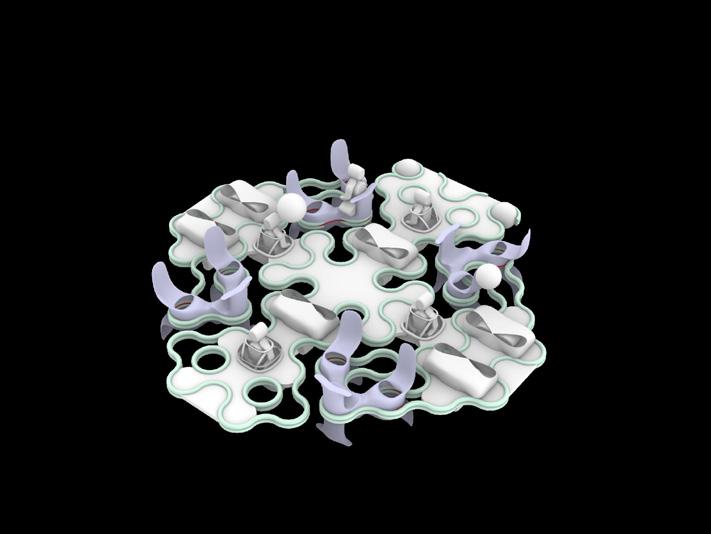
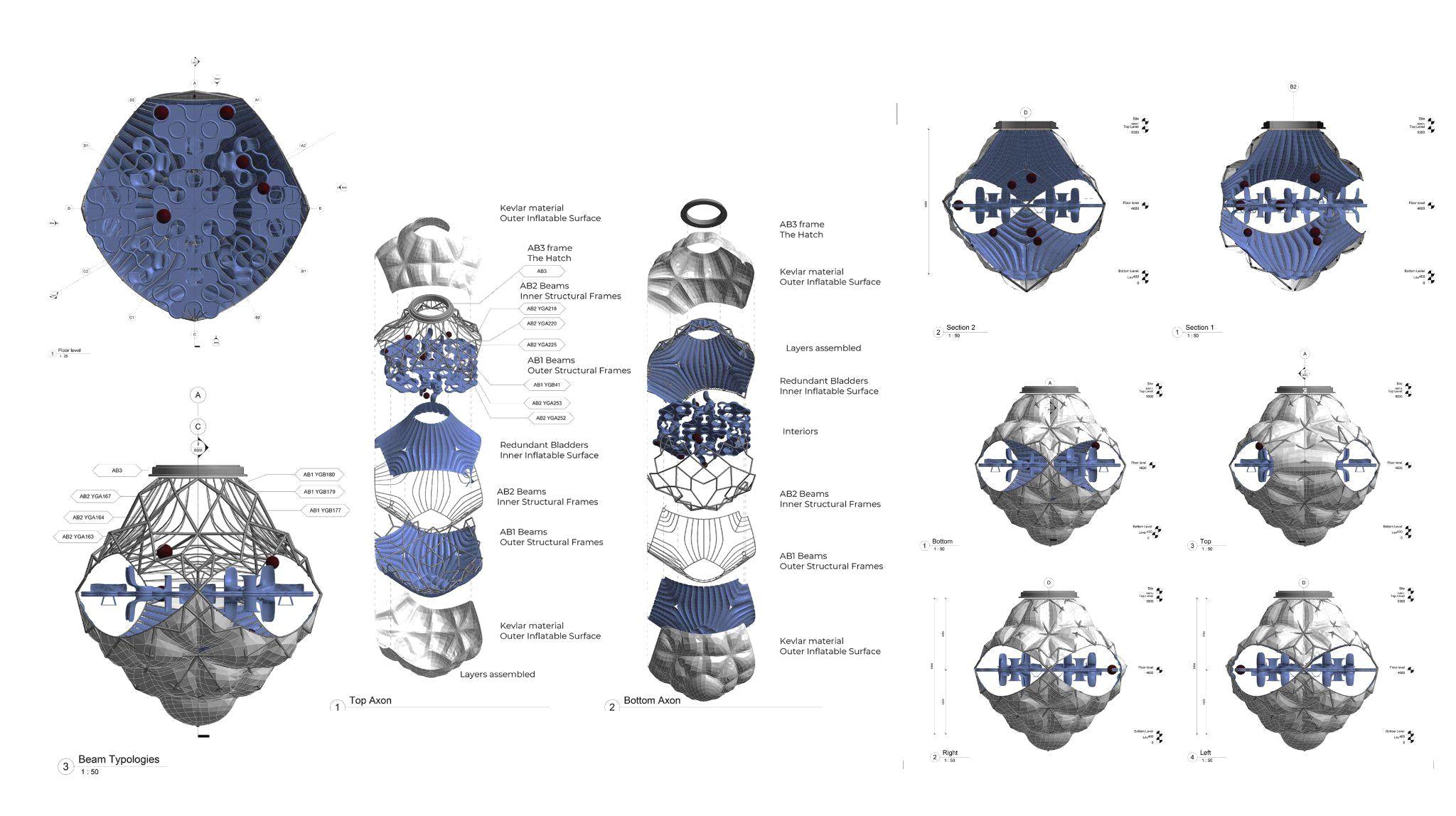
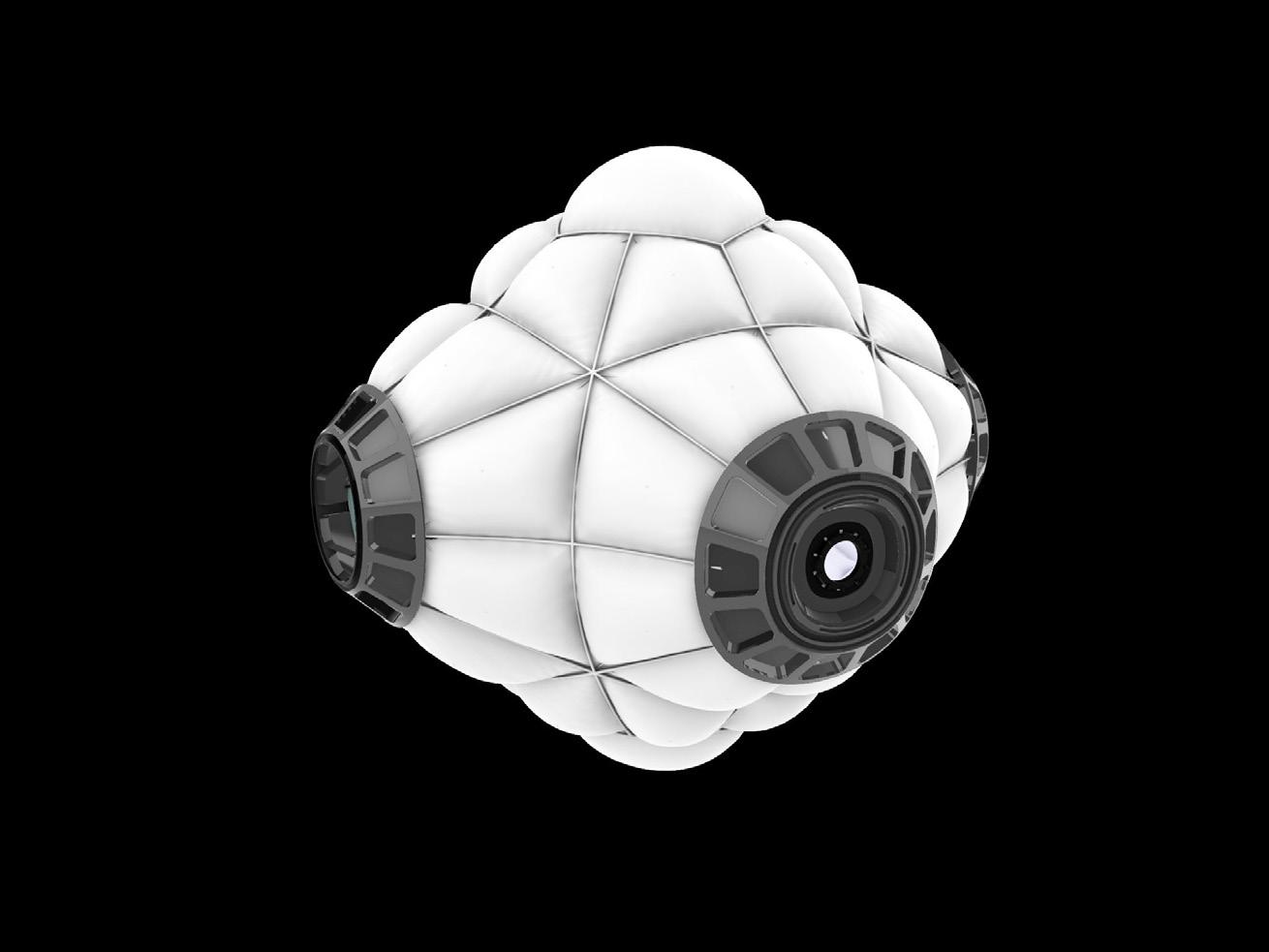
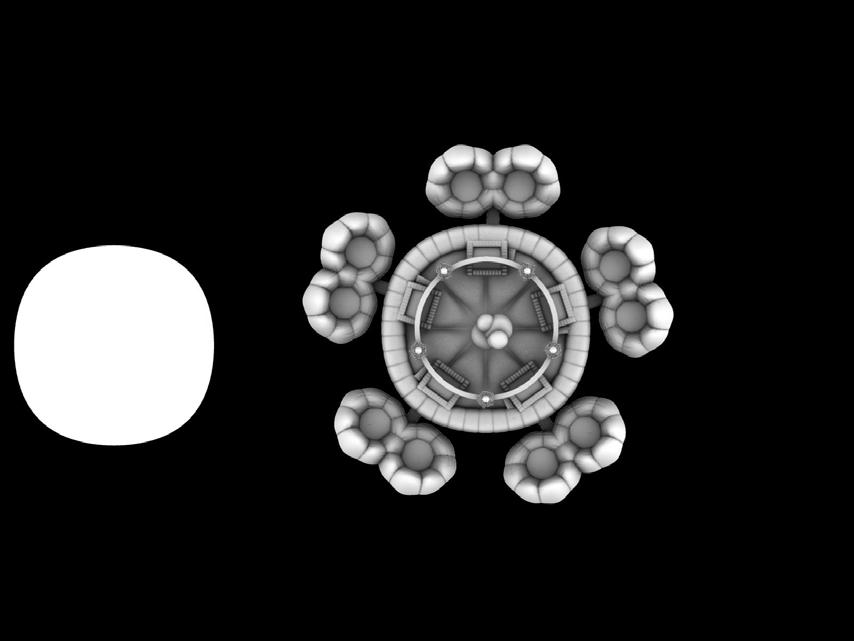
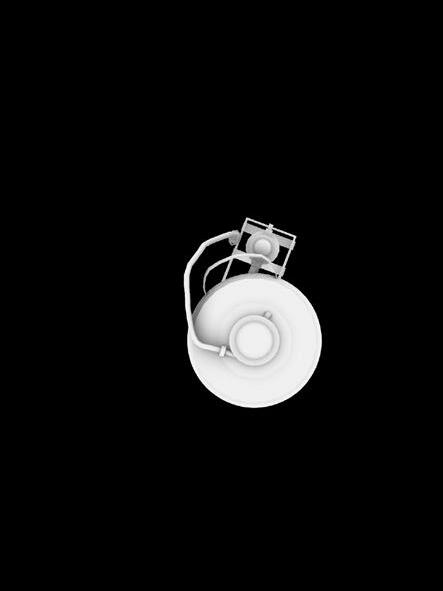
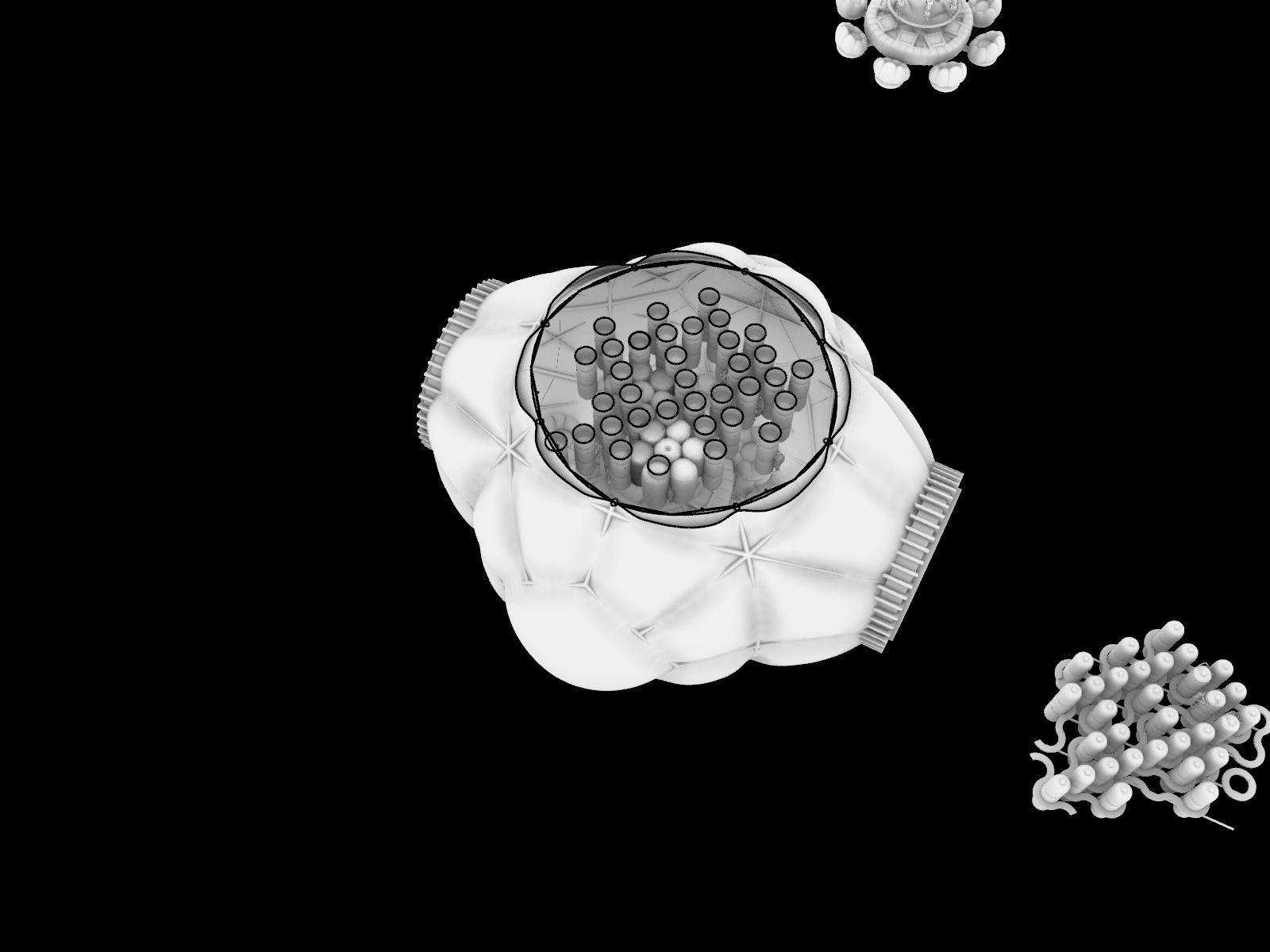
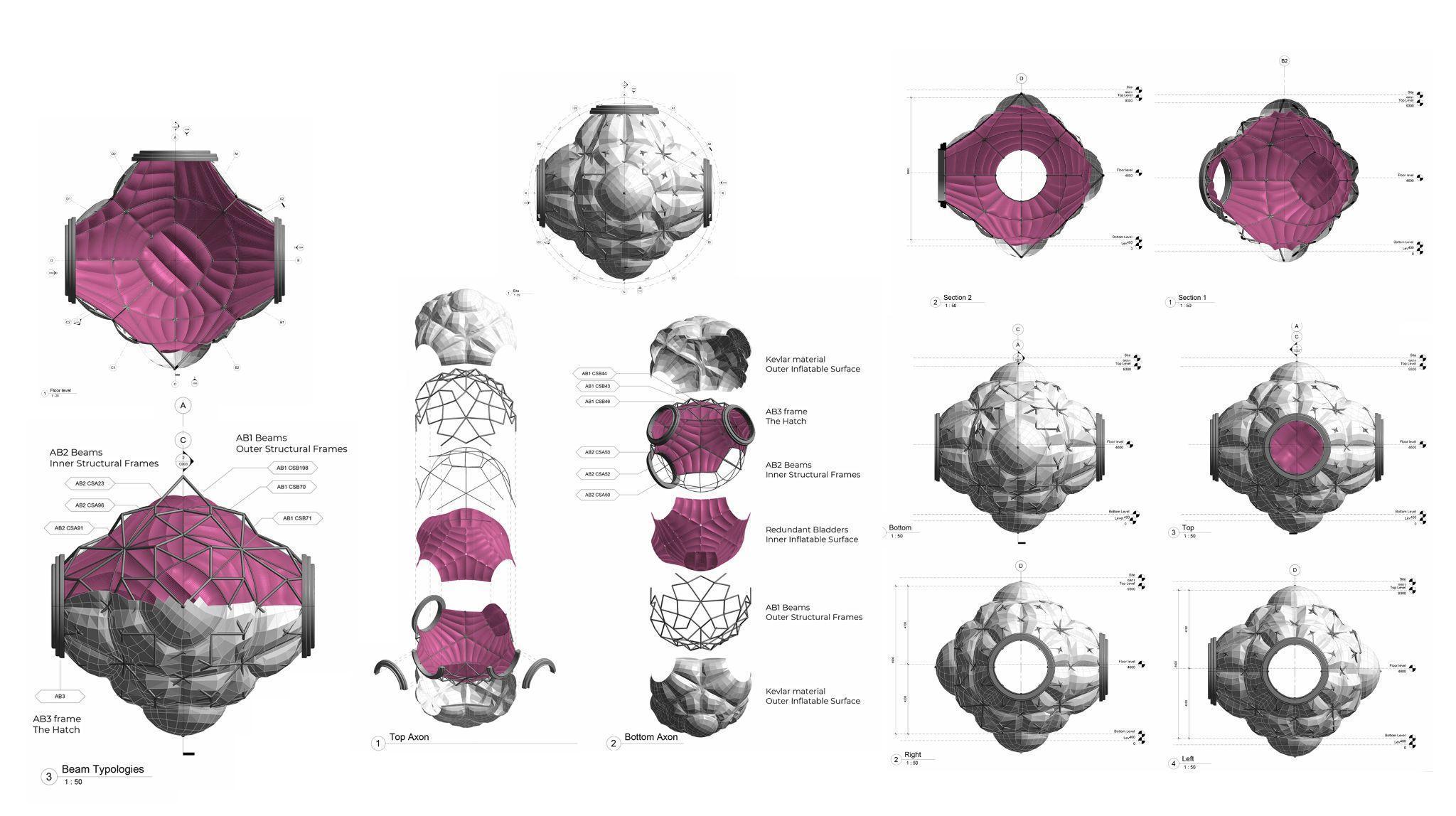
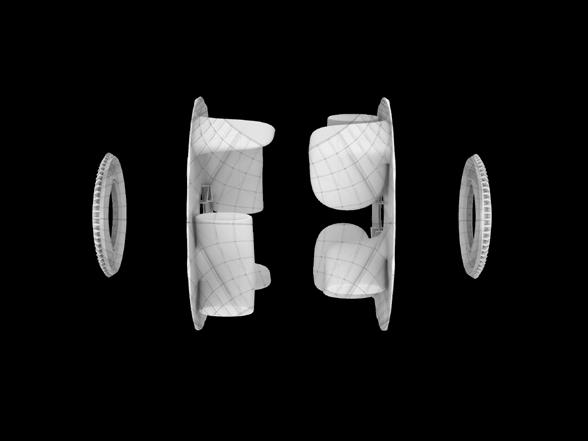
UNIT CONFIGURATION AND ASSEMBLY
The central module connects its neighbours by hatching its connecting faces. The tensegrity structure presents tension points within the structure to perfectly shape the origami unfolding.
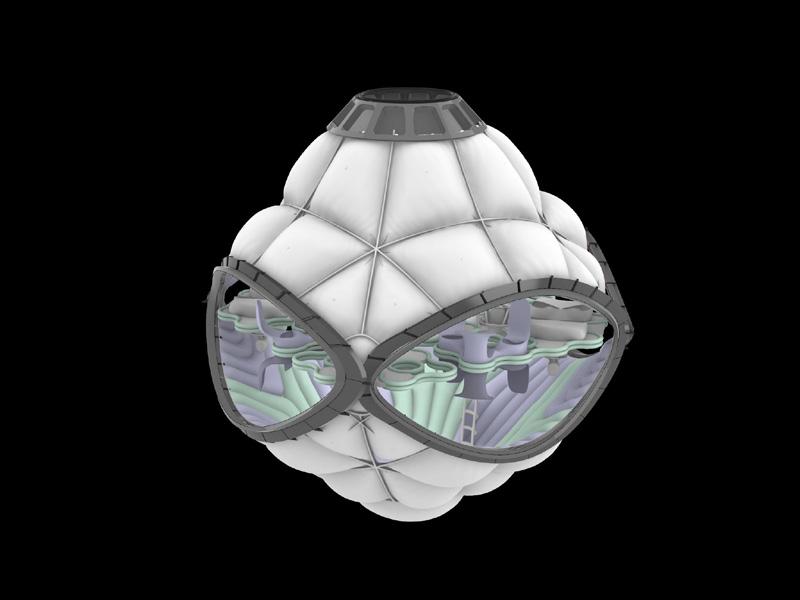
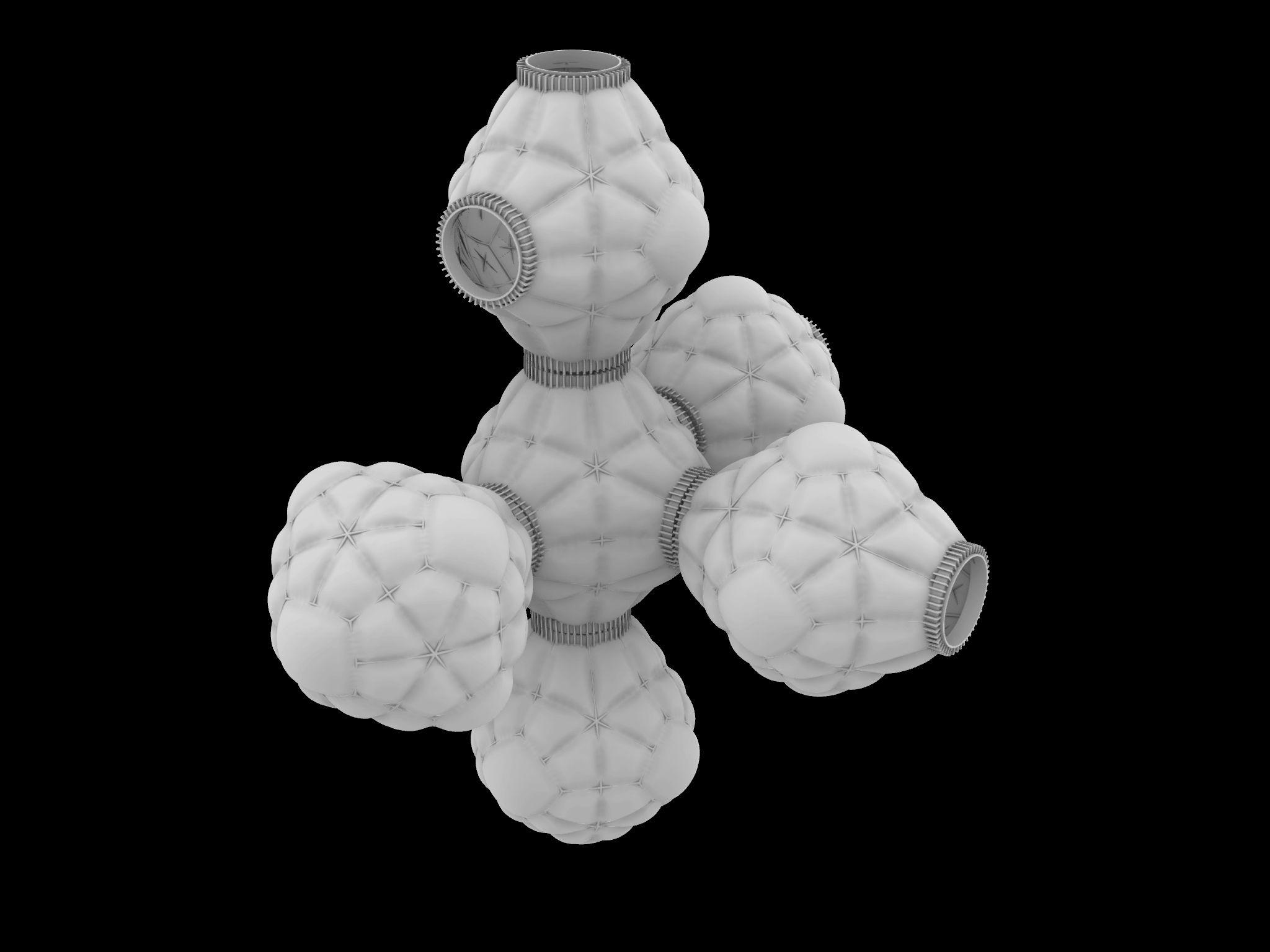
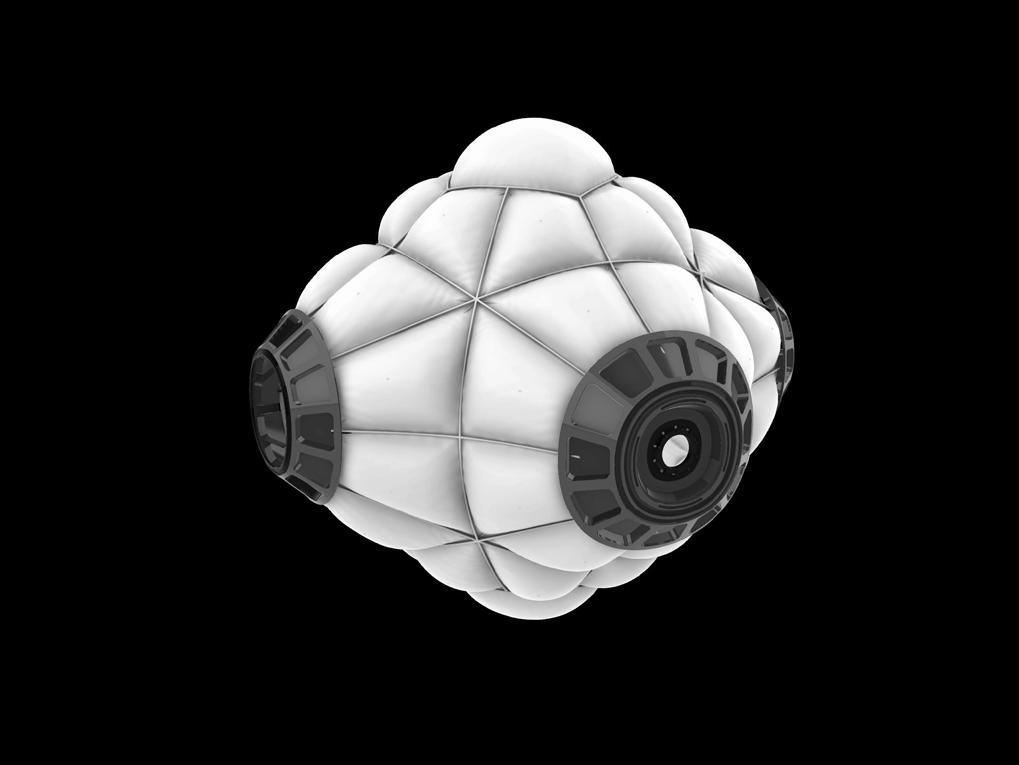
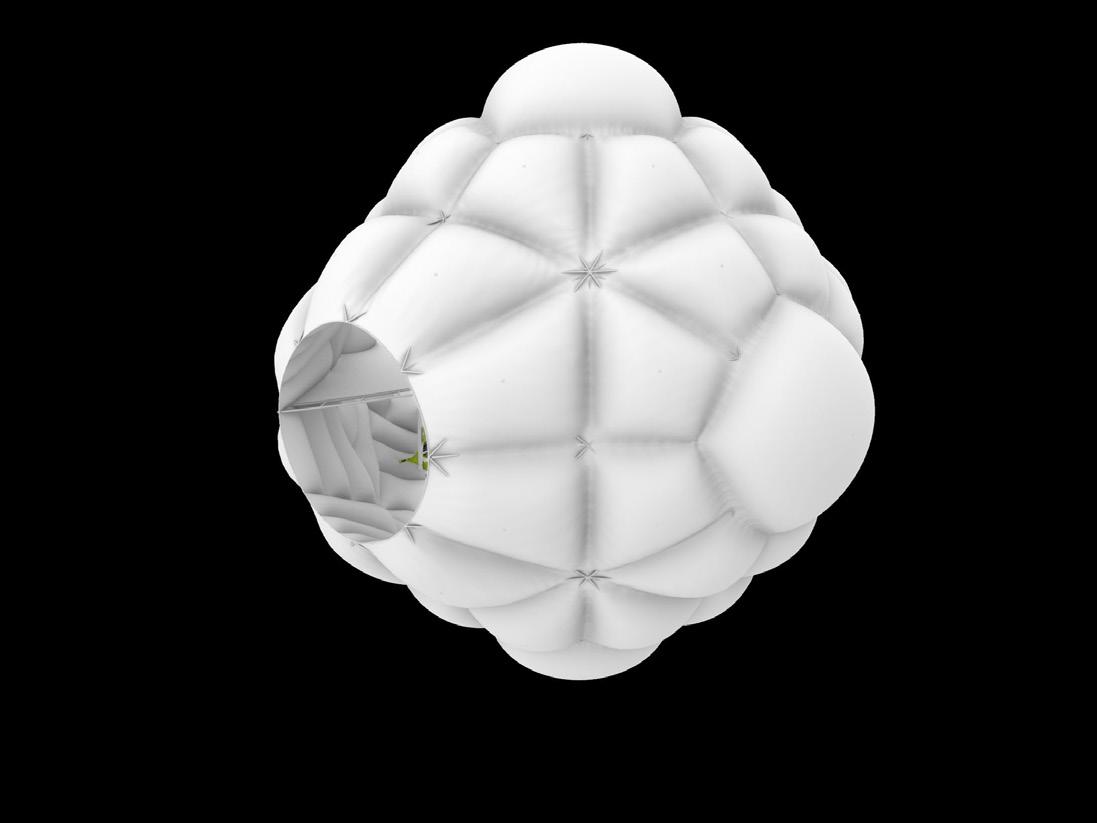
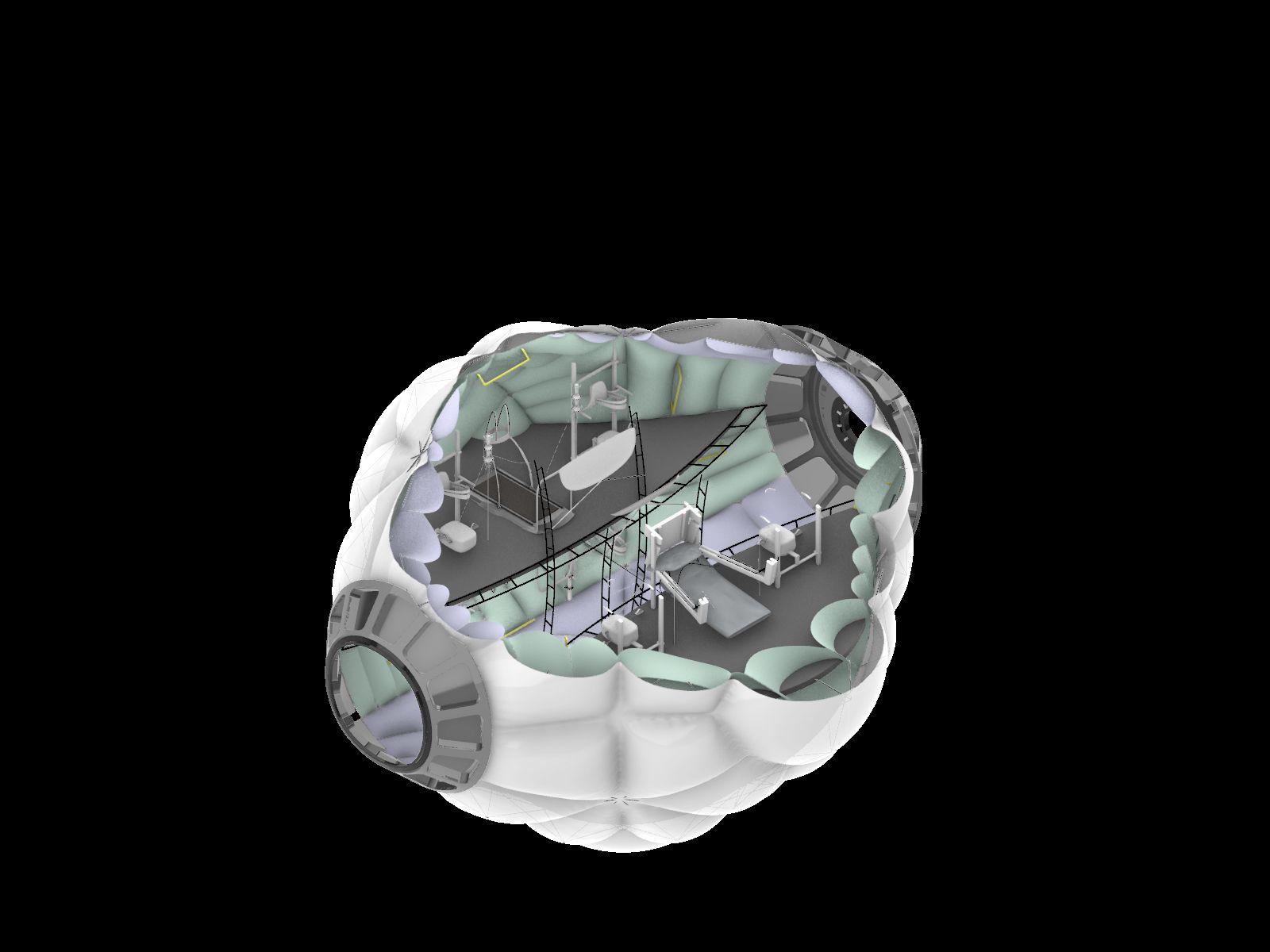
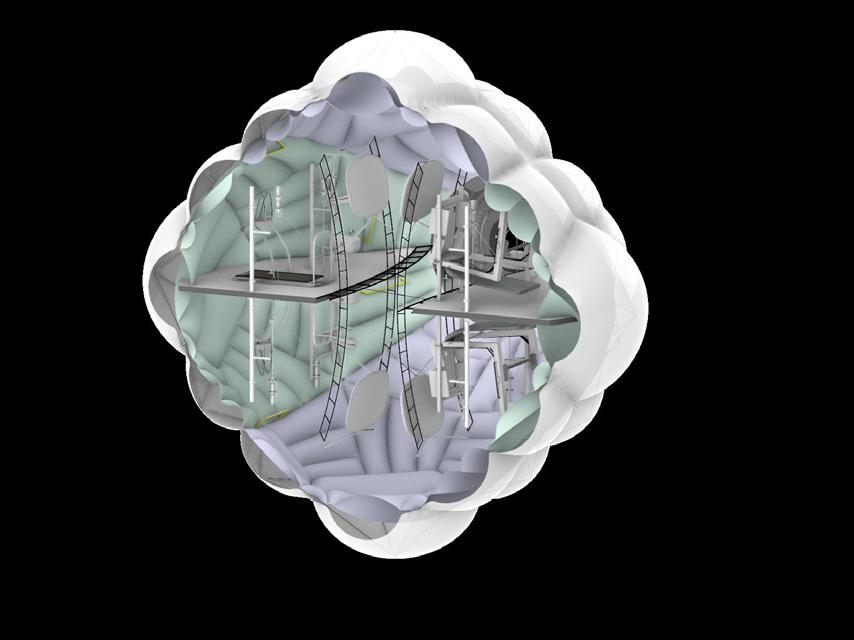
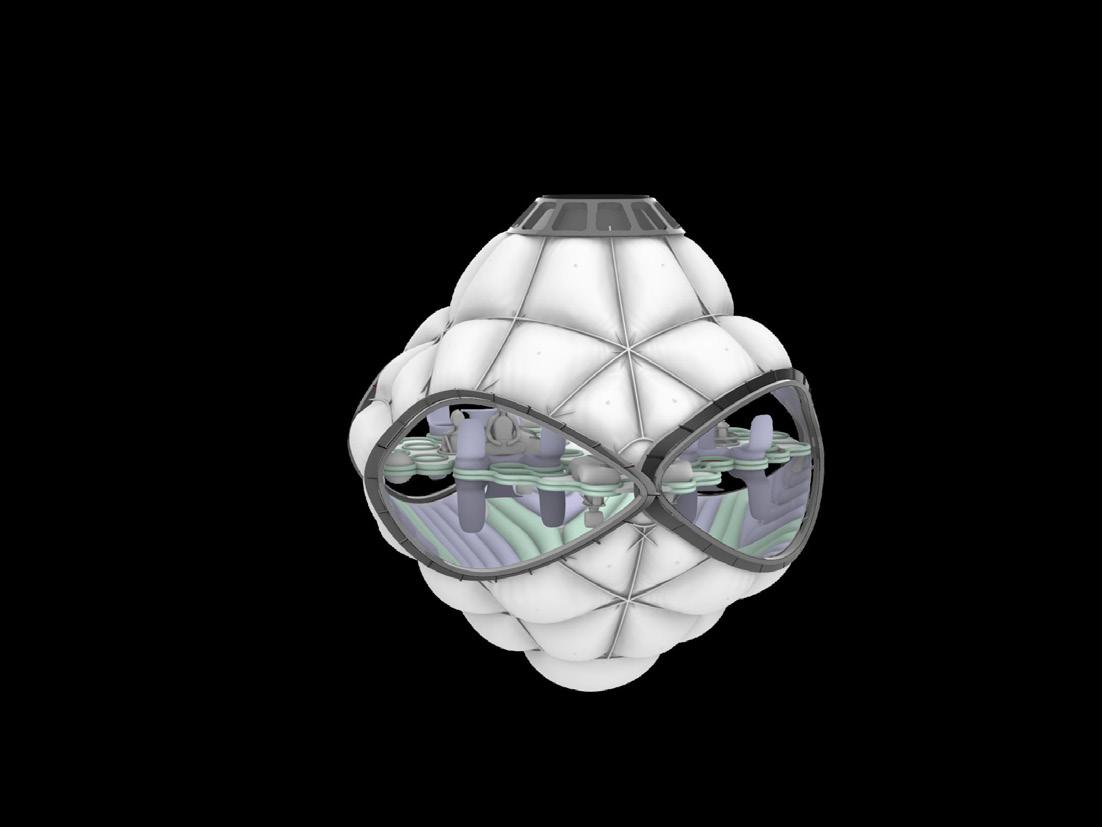
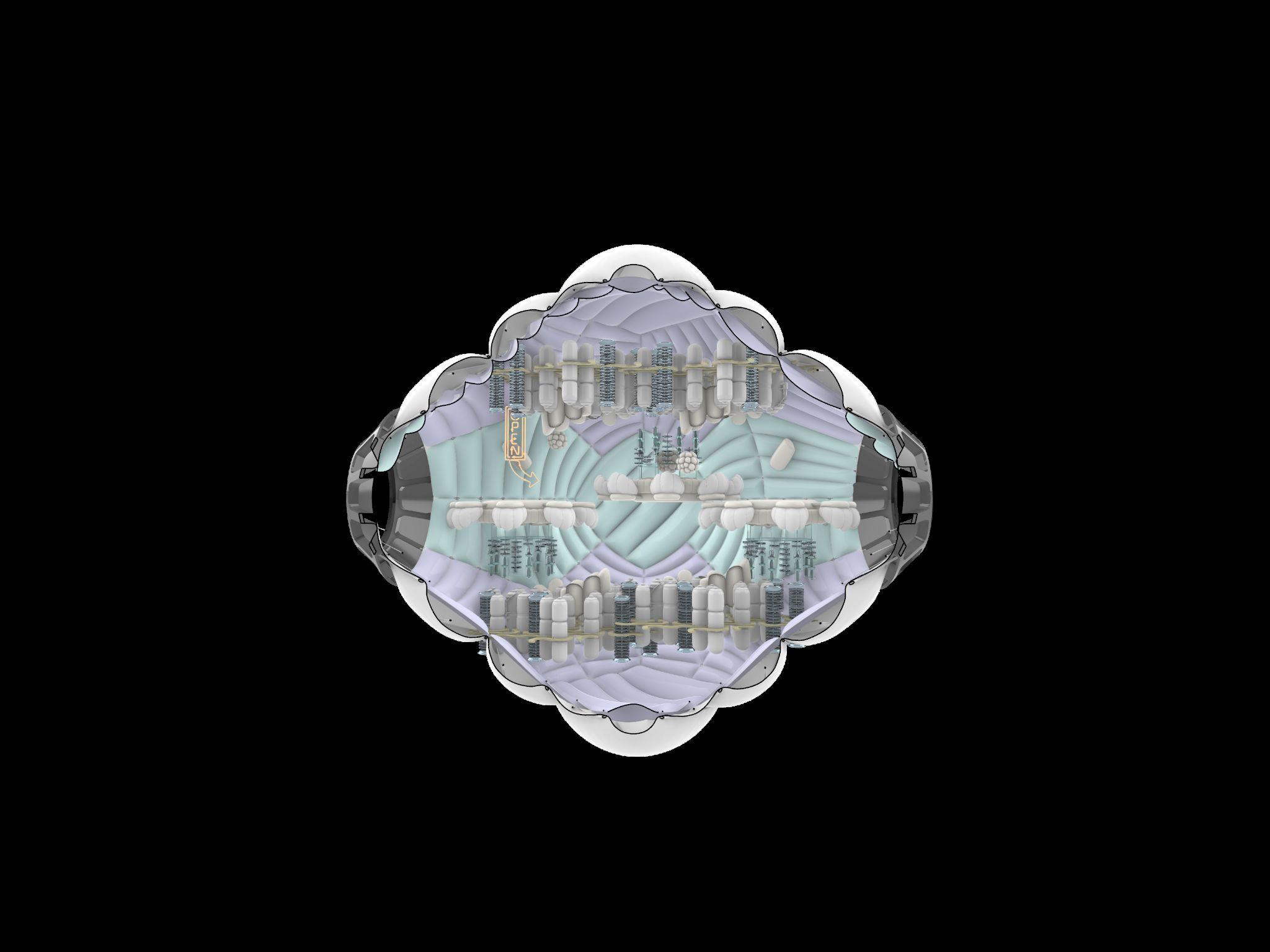
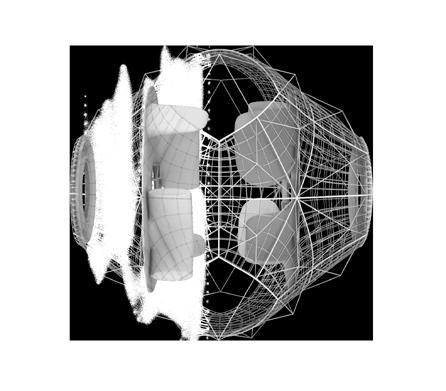
NEBULAE – RECREATION MODULES CONFIGURATION
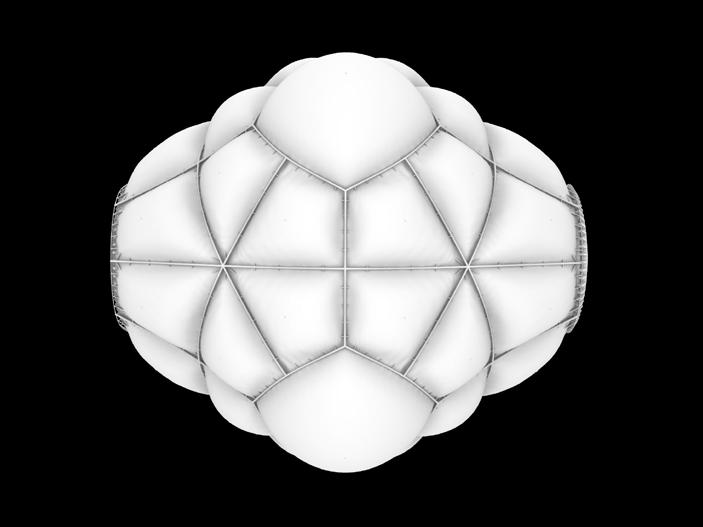
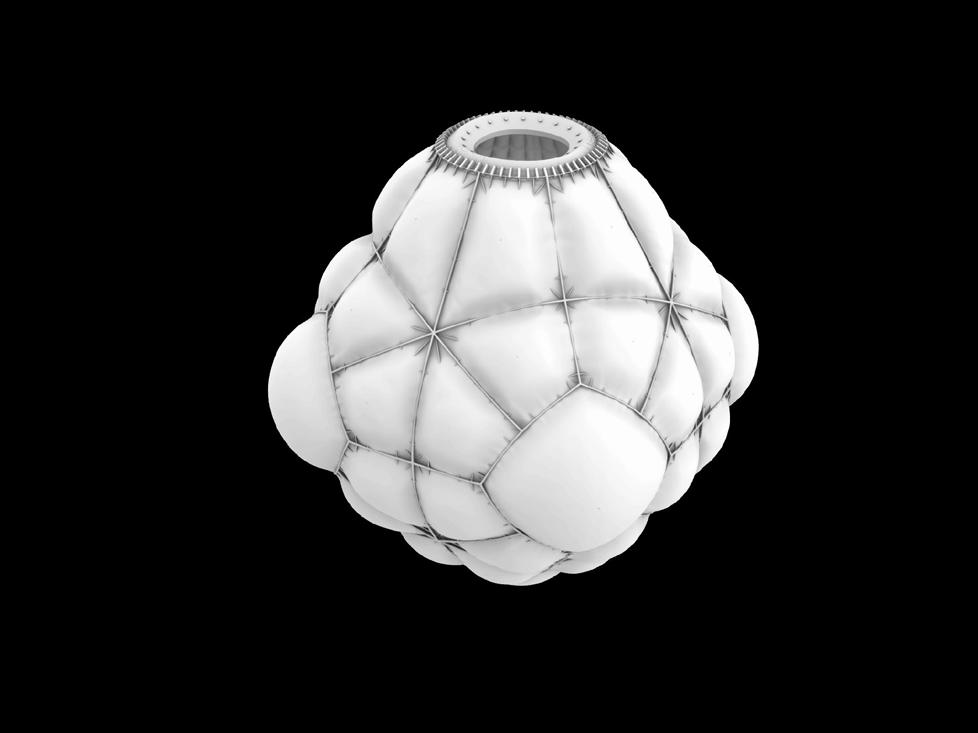
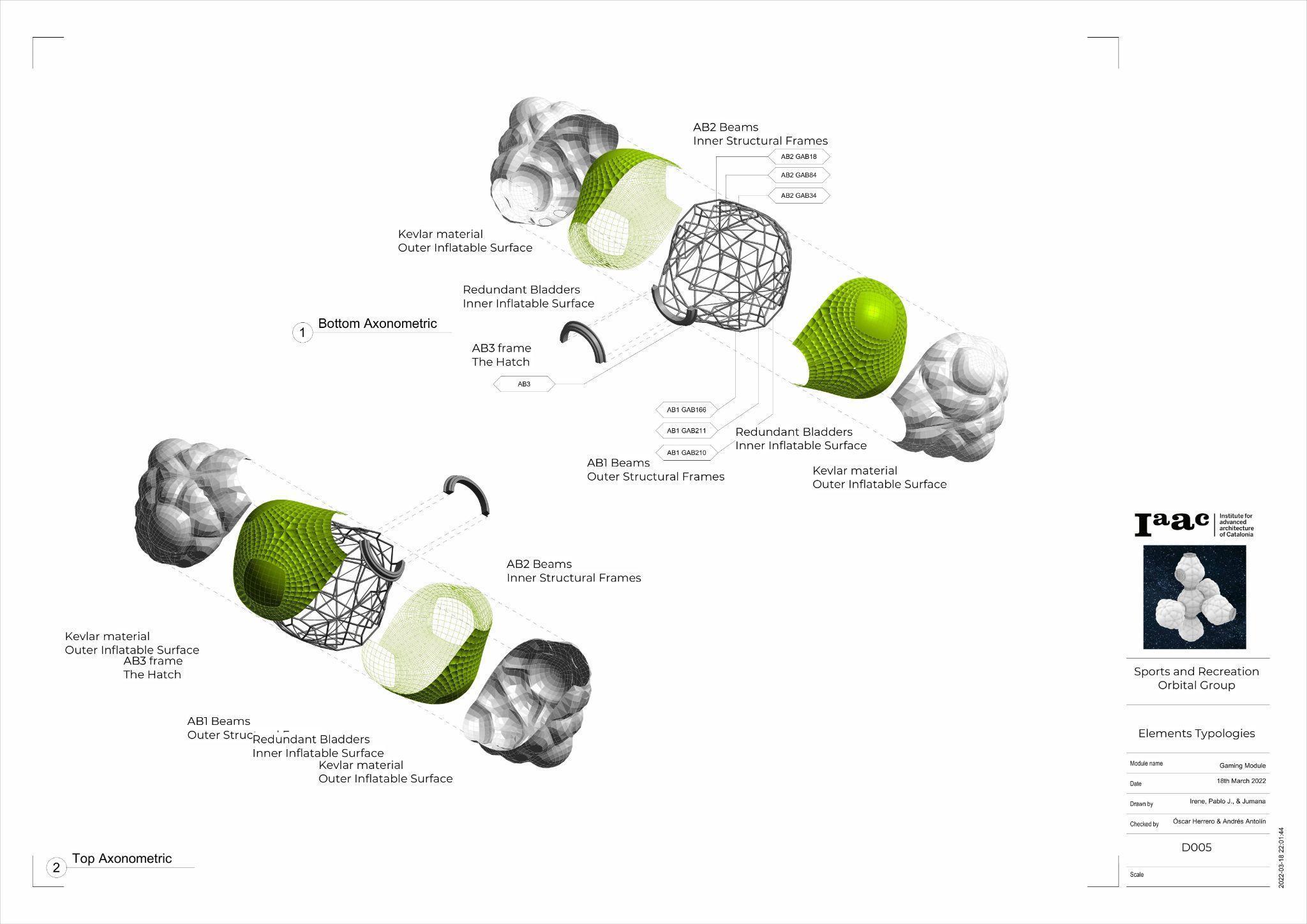
The modules are made up of two structures, one internal and the other external, that support and shape the two inflatable faces of the modules. The internal chamber that is generated is a radiation isolate as it is the receptive chamber for humidity and fluids for recycling.
Interior - Inflatable
Exterior - Inflatable
NEBULAE
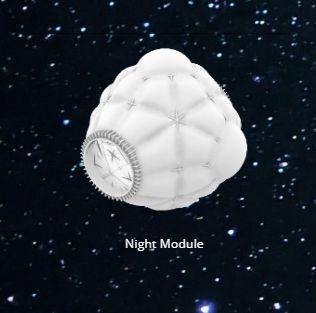
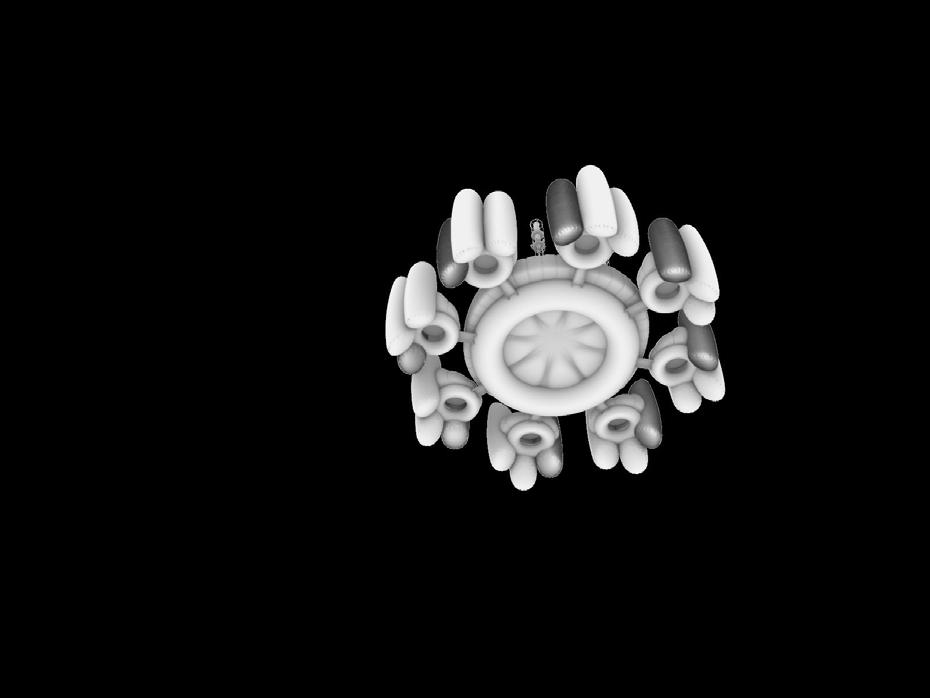
DAY AND NIGHT MODULES
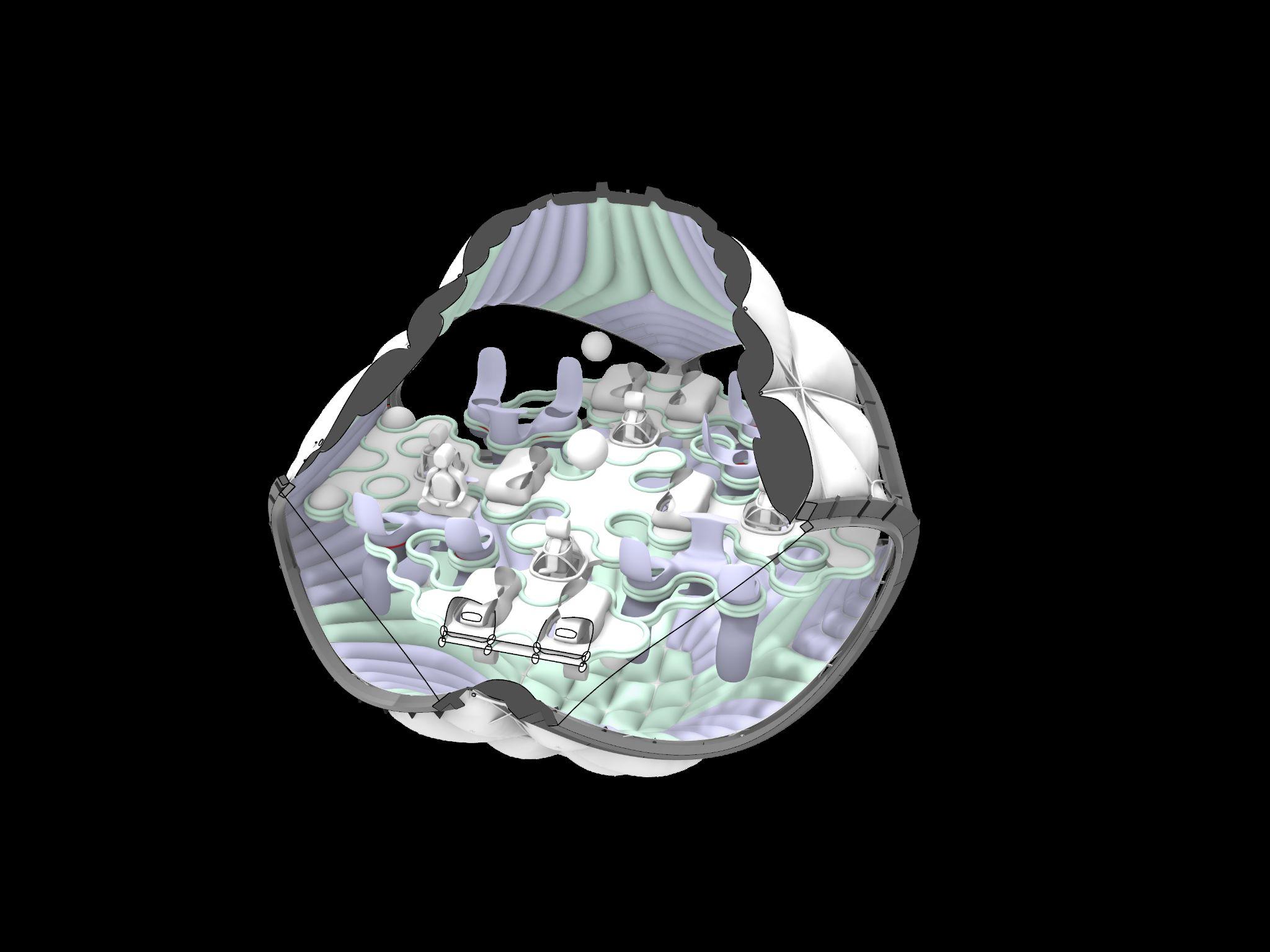
To determine the activities of each module we are based on present and absent activities. That is, the present activities are related to the necessary ones established by NASA, while the absent ones are those related to recreation. Recreational activities are divided into 4 modules that present: sport + physical activity, fun activities, sociability, and mental health. To increase the quality of mental health for astronauts and visitors, each activity is divided into day and night activities. Where the user chooses how to feel. As is known, every 45 minutes approx. dawn and dusk inside the station. This is why each module presents a different opening to the activity, creating a catalogue of modules by activity. The socialization module or CASINO is a night module, mental health – MEDITATION, READING + AR and a hybrid -Isolation module, GAMING + SPORTS and EXERCISE are daytime modules. Finally, the middle module is assigned as a connector.
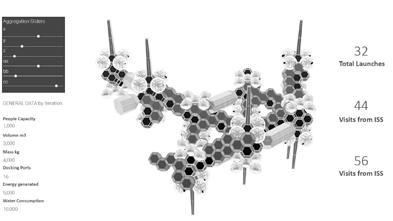
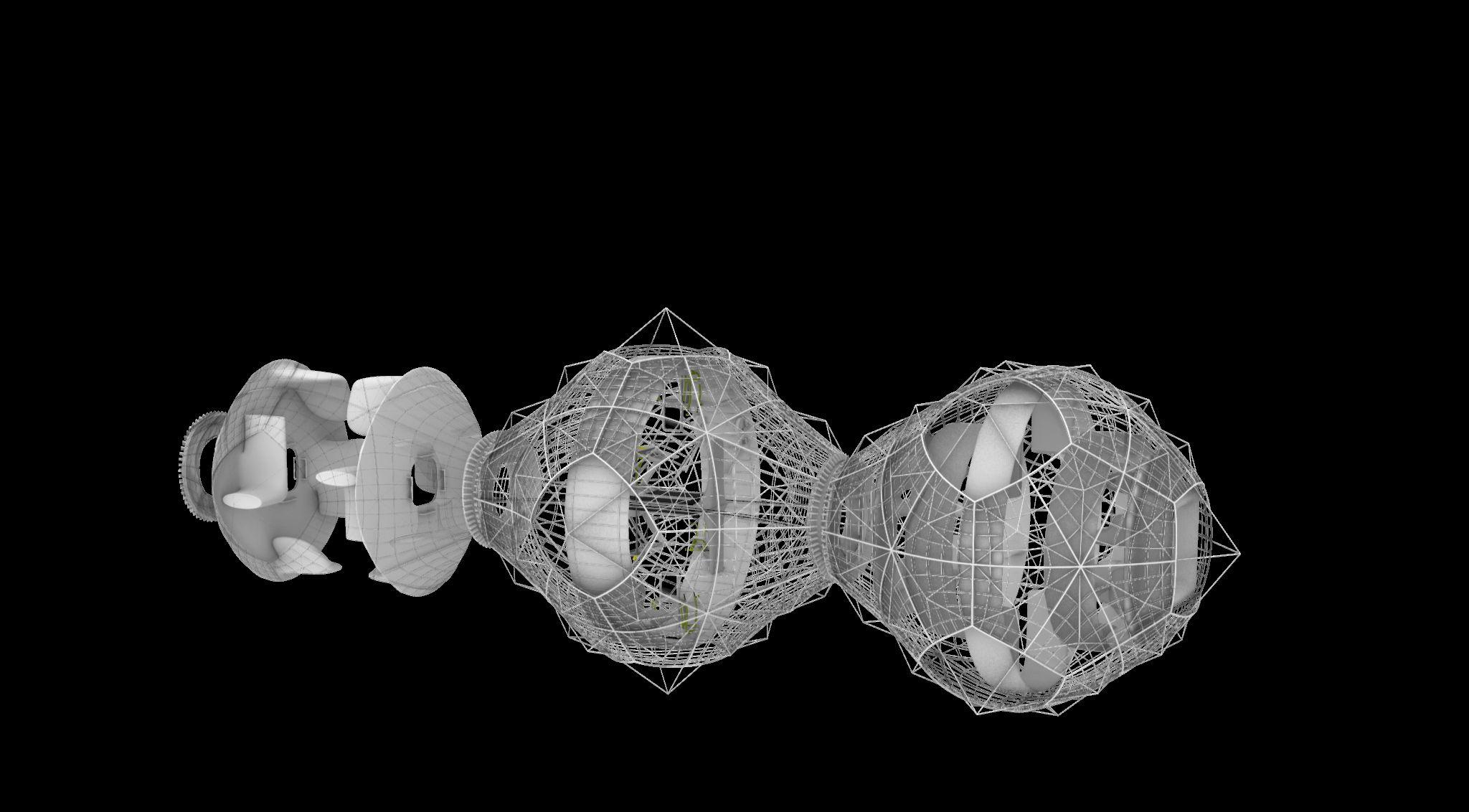
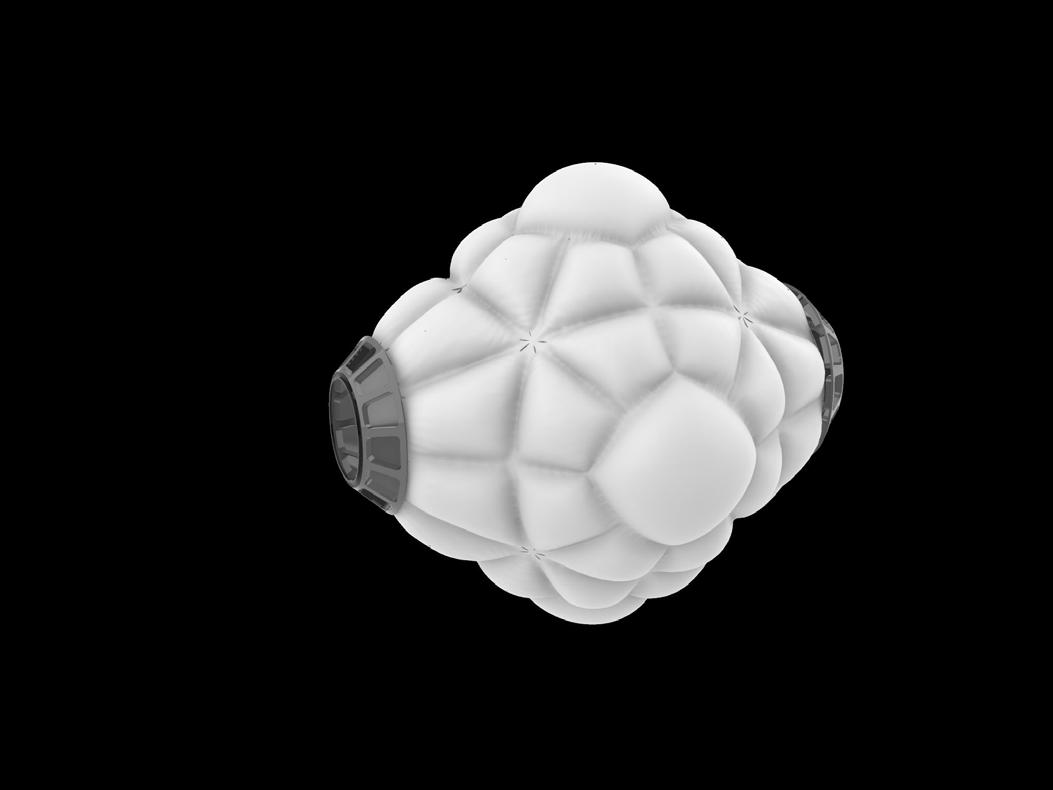
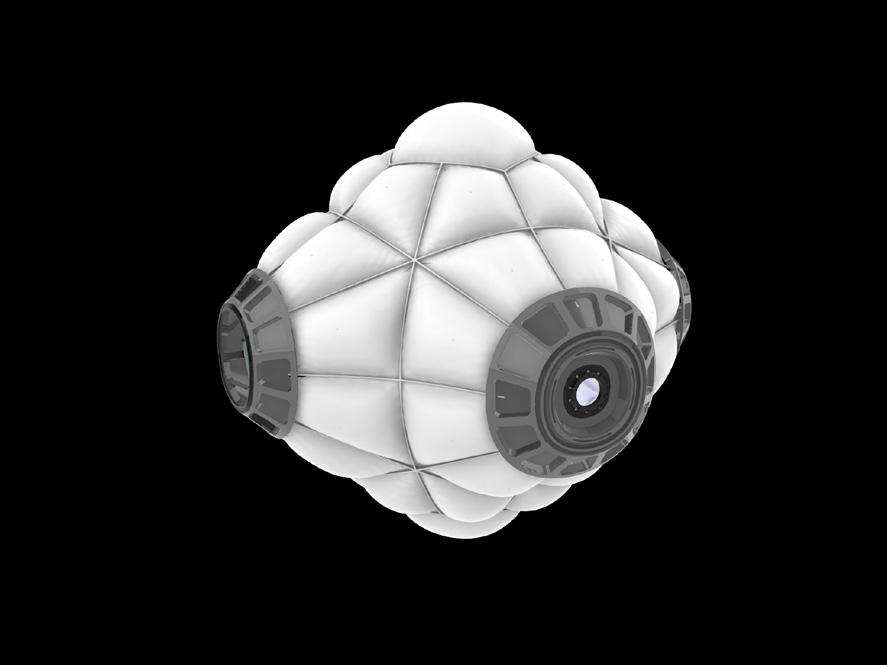
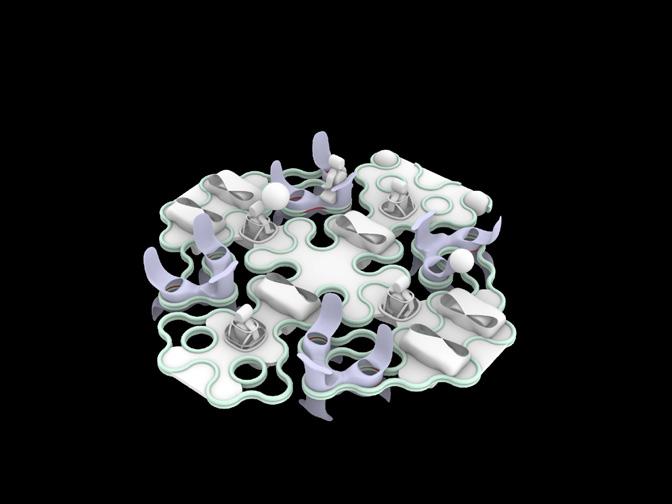
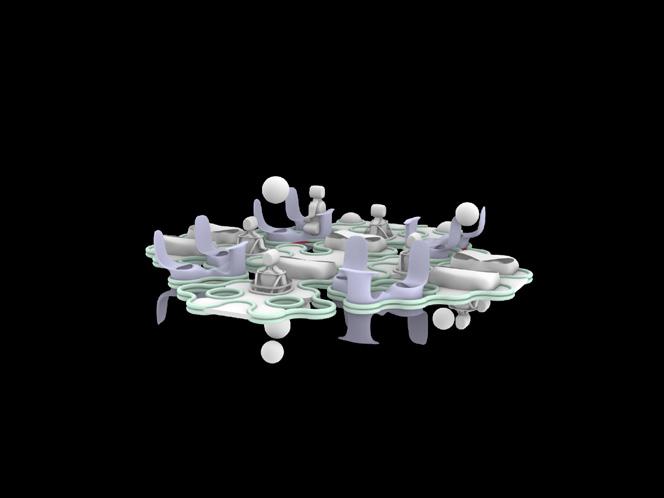
Recreation Cluster
Space Orbit Habitat New ISS
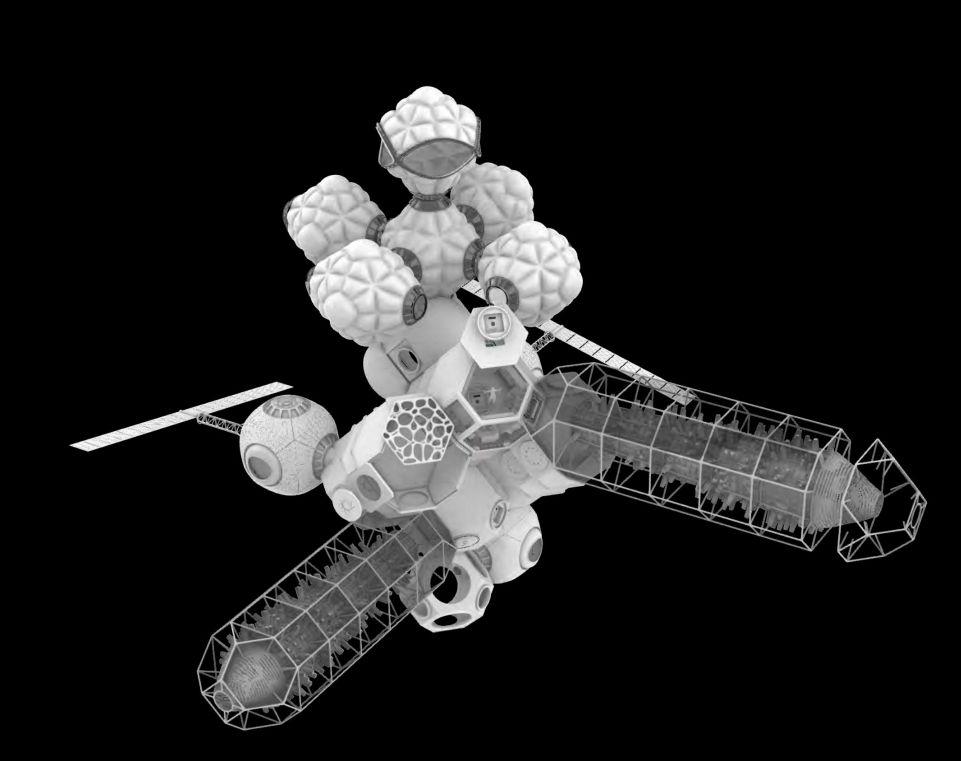
Yoga Module Gaming Module MODULES AGGREGATION
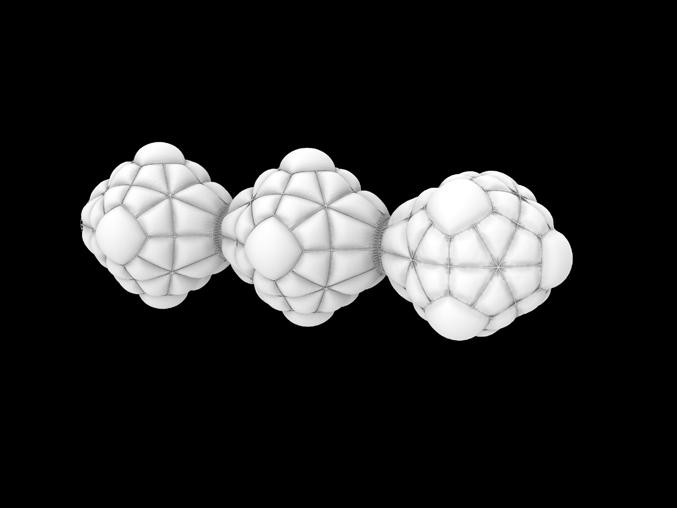
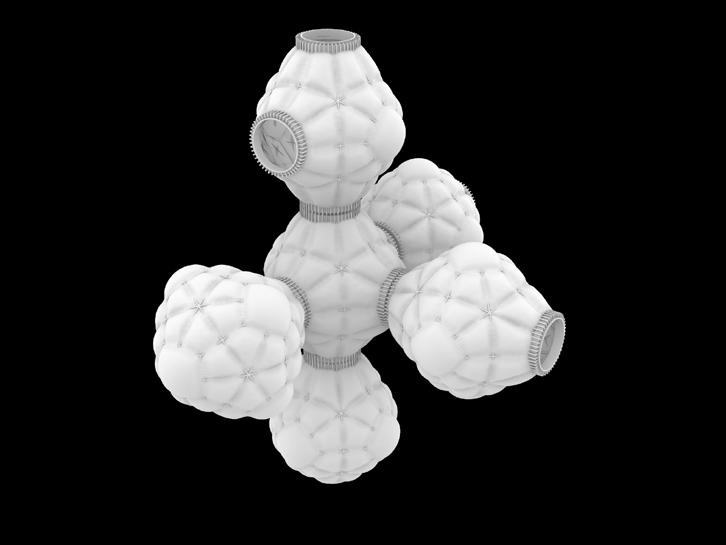
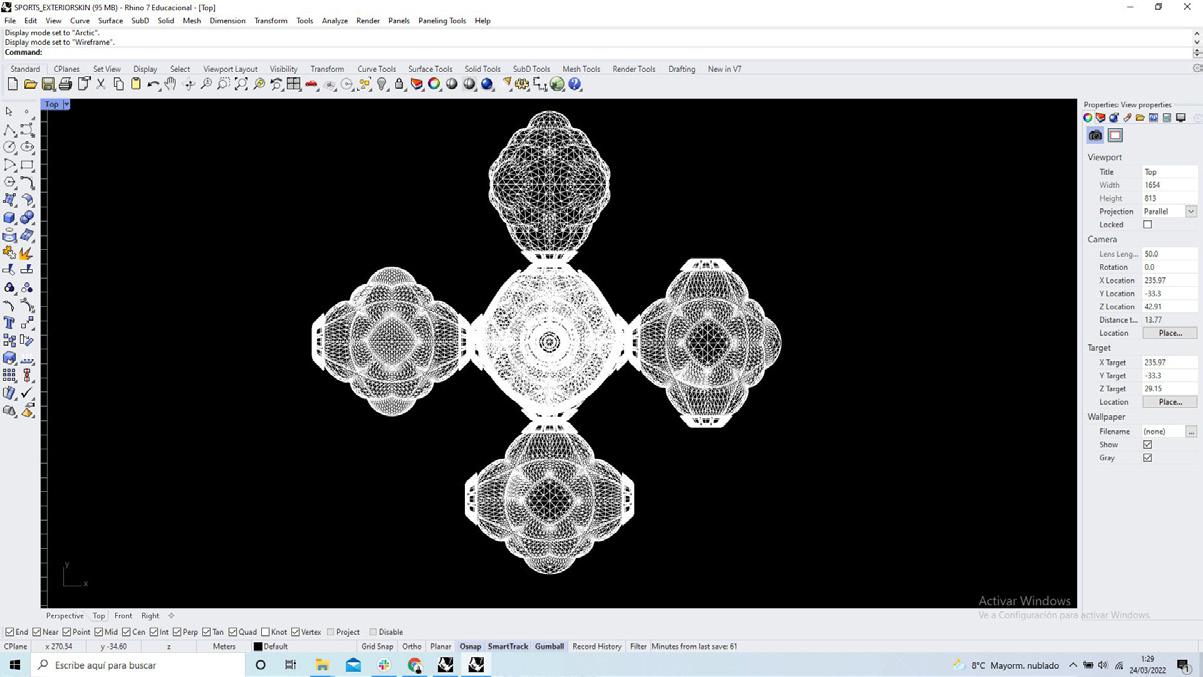
 Sports Module Casino Module
Sports Module Casino Module
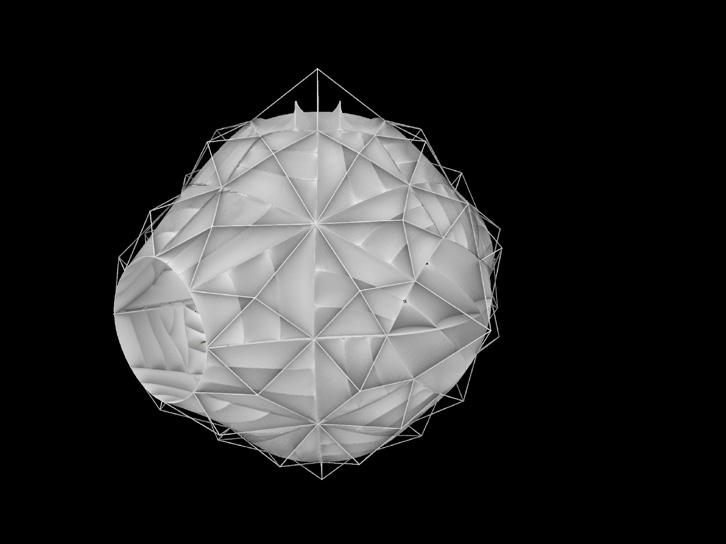
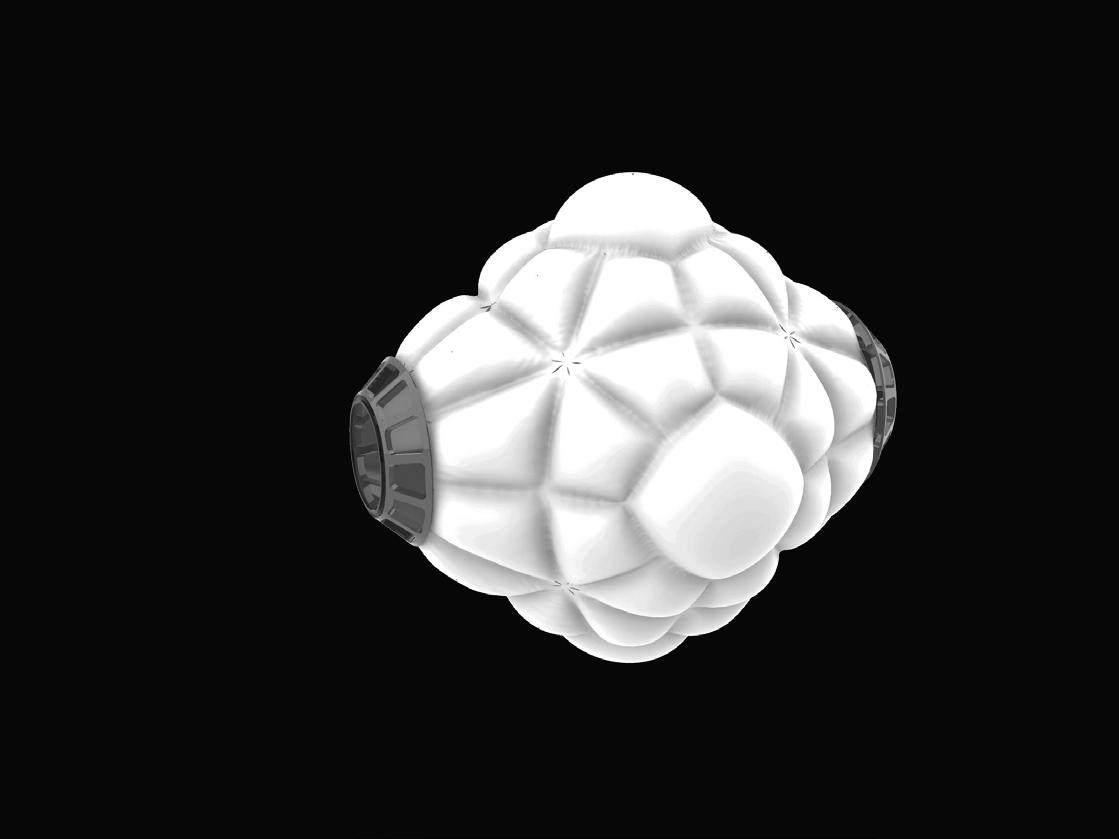
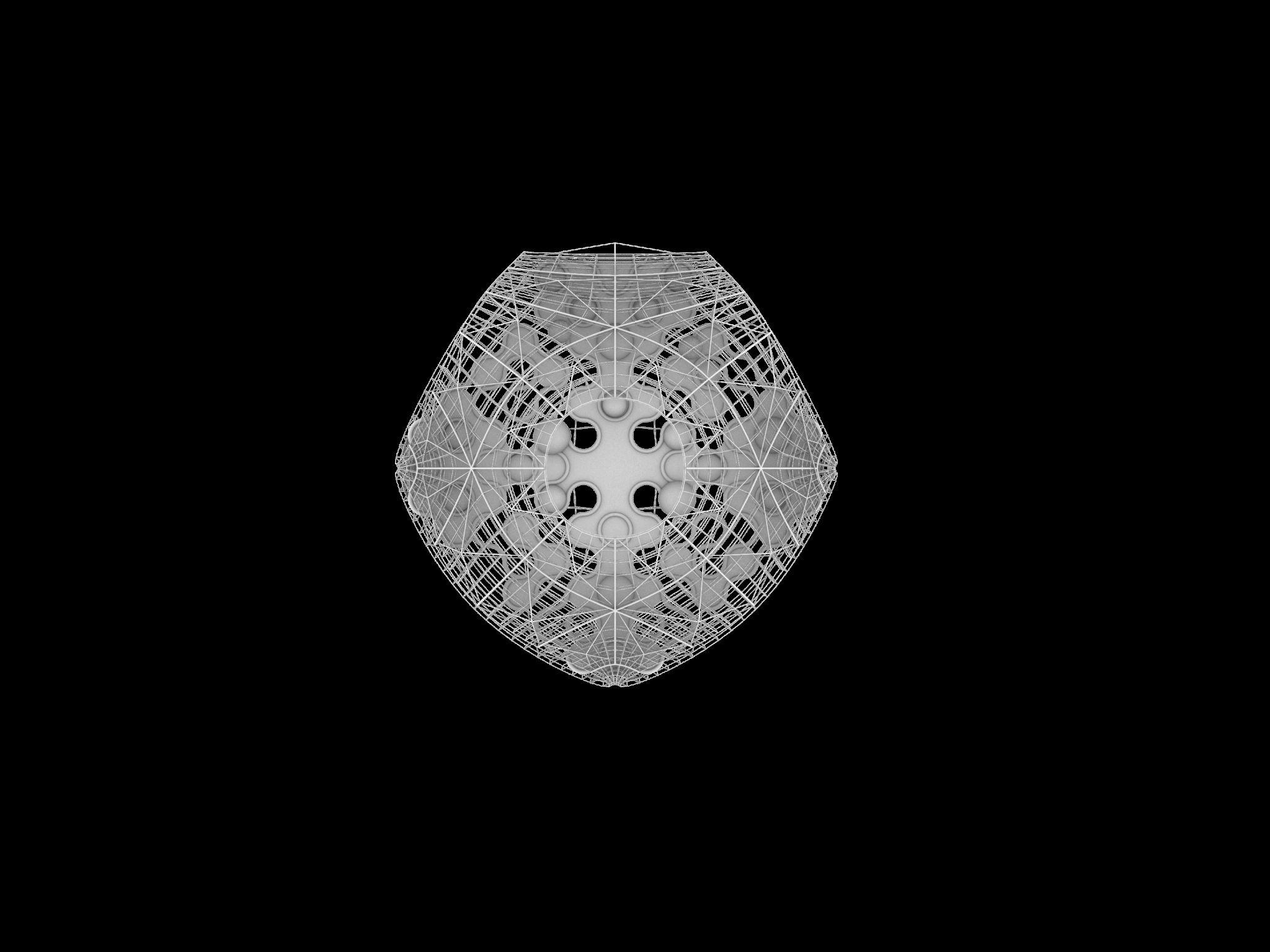
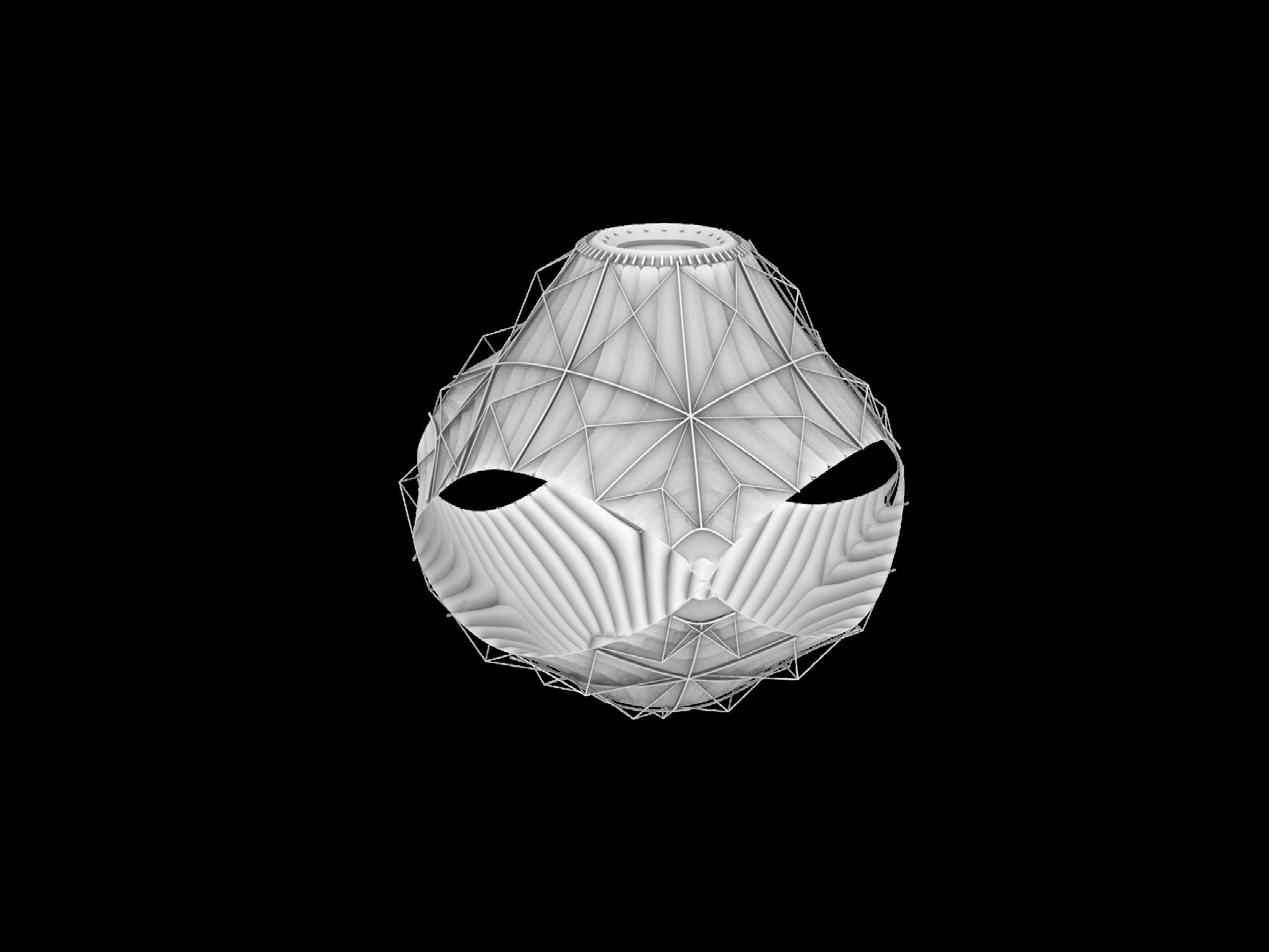
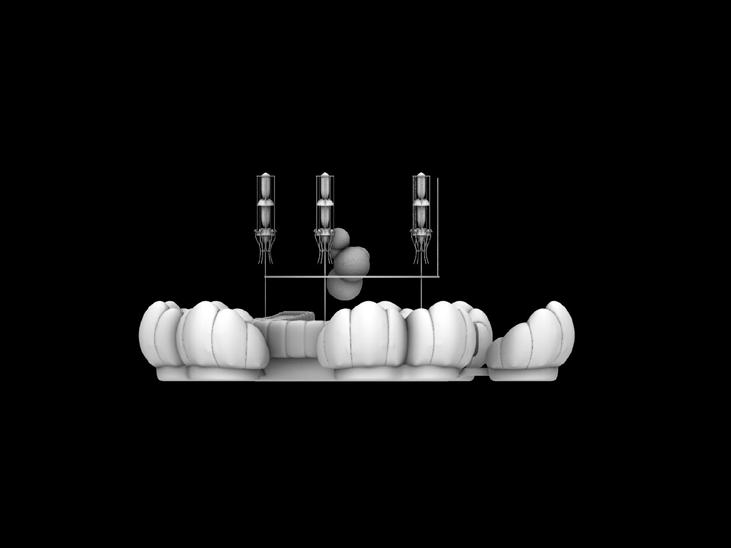
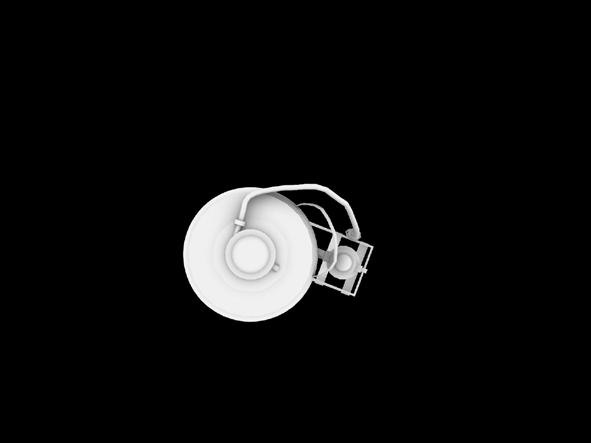
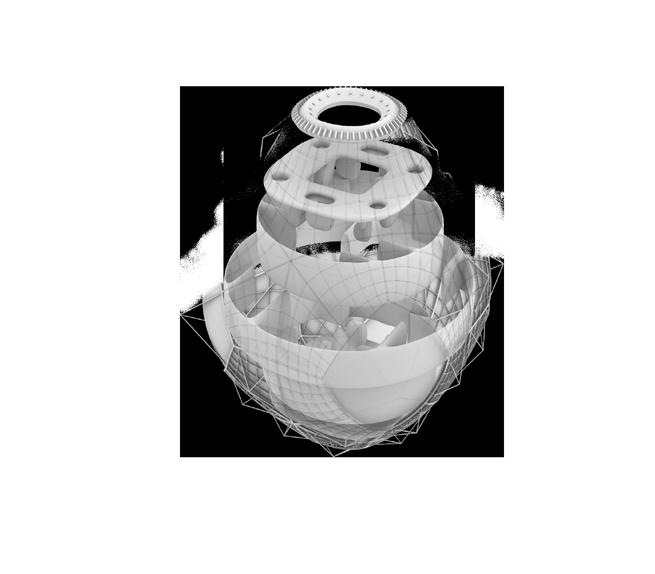
Structure Configuration Interior Structure InteriorInflatable Main Structure ExteriorInflatable Module Configuration Interior Space Main Structure Interior Inflatable Exterior Inflation NEBULAE
INFLATABLE SYSTEM
NEBULAE

Recreational Typologies

NEBULAE
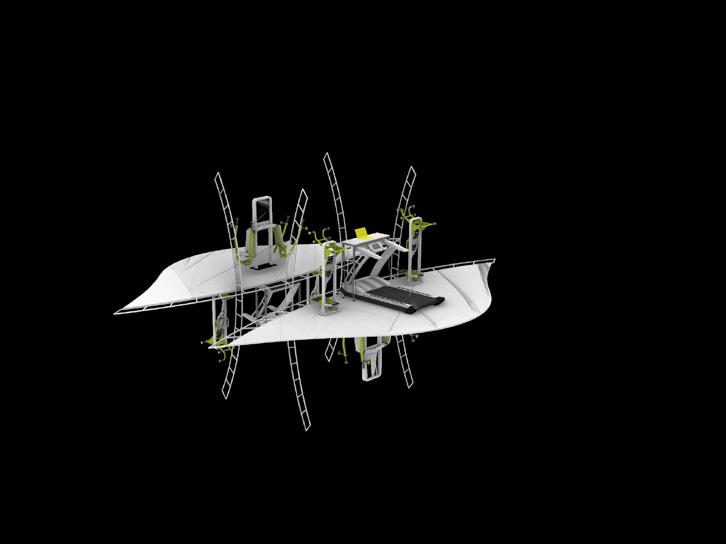
SPORTS
SPORTS
and Upper Section to rest cv Bottom and Upper Section to rest
and Upper Section to rest Free Circulation in the interior Sports
Exterior Inflatable -
Interior Inflatable -
Bottom
Bottom
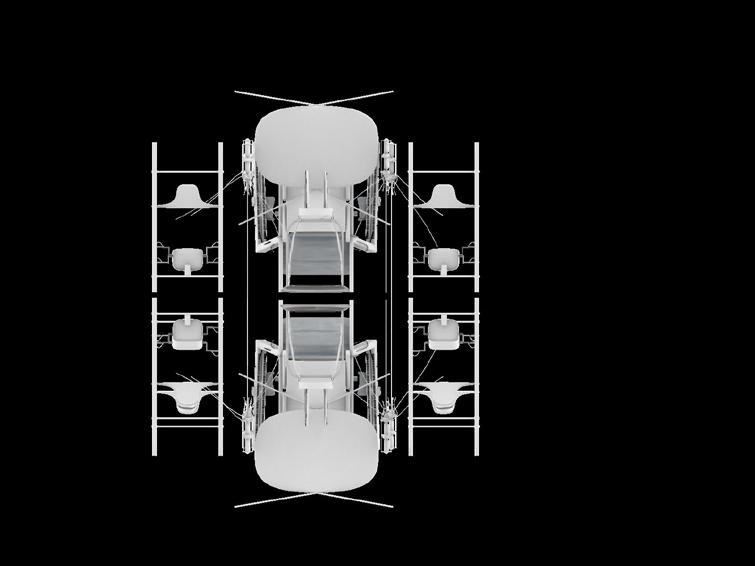
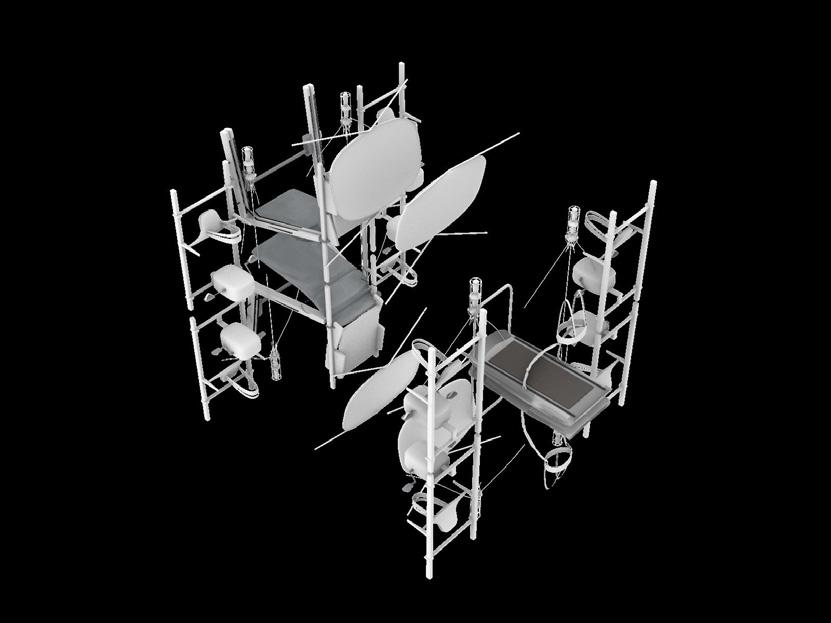
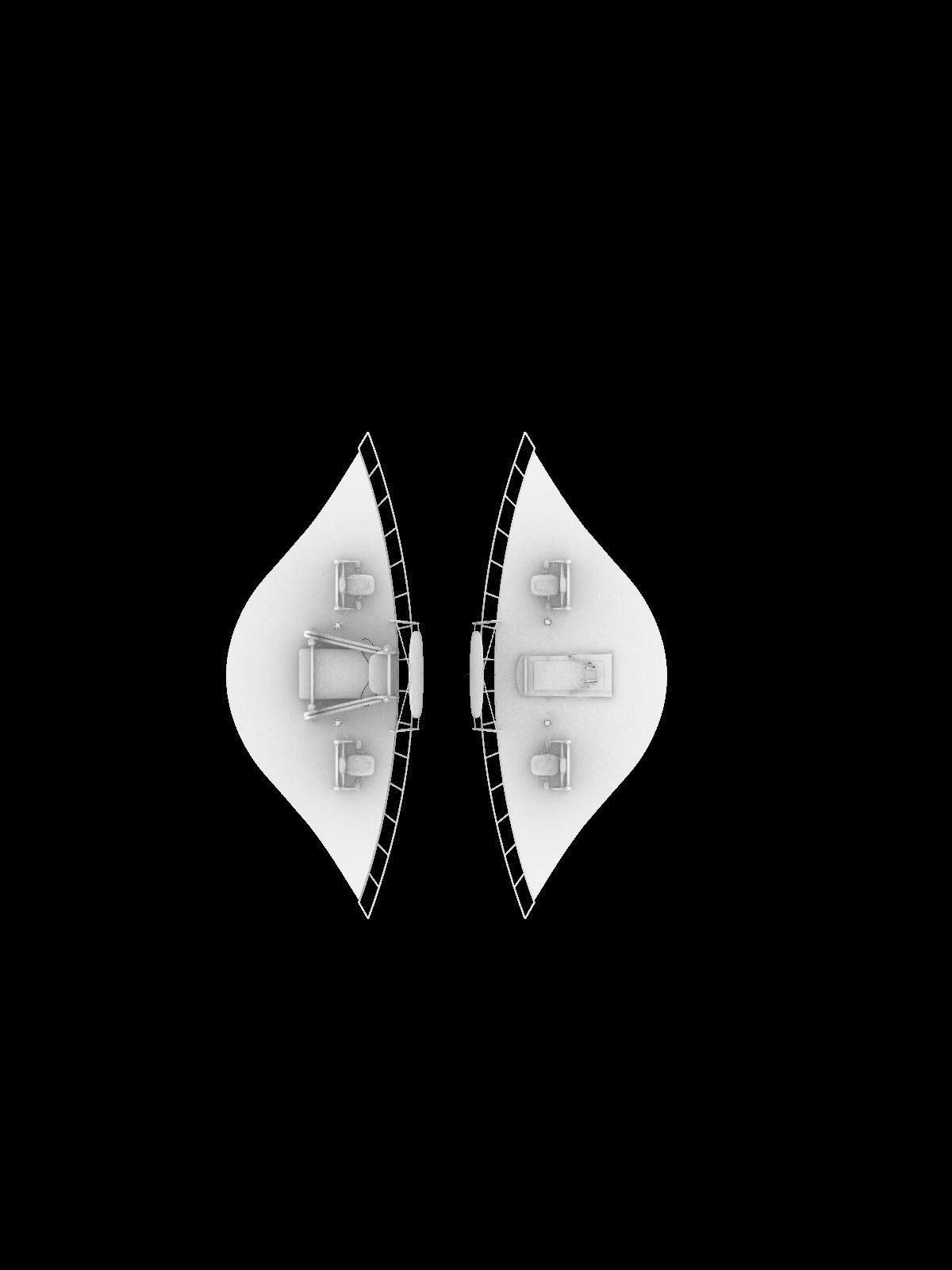
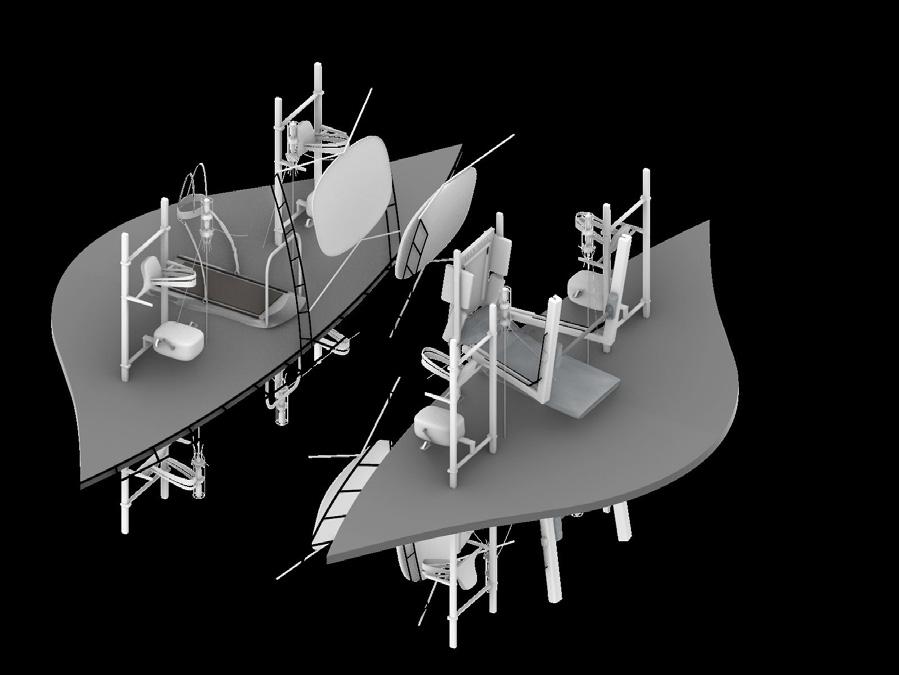
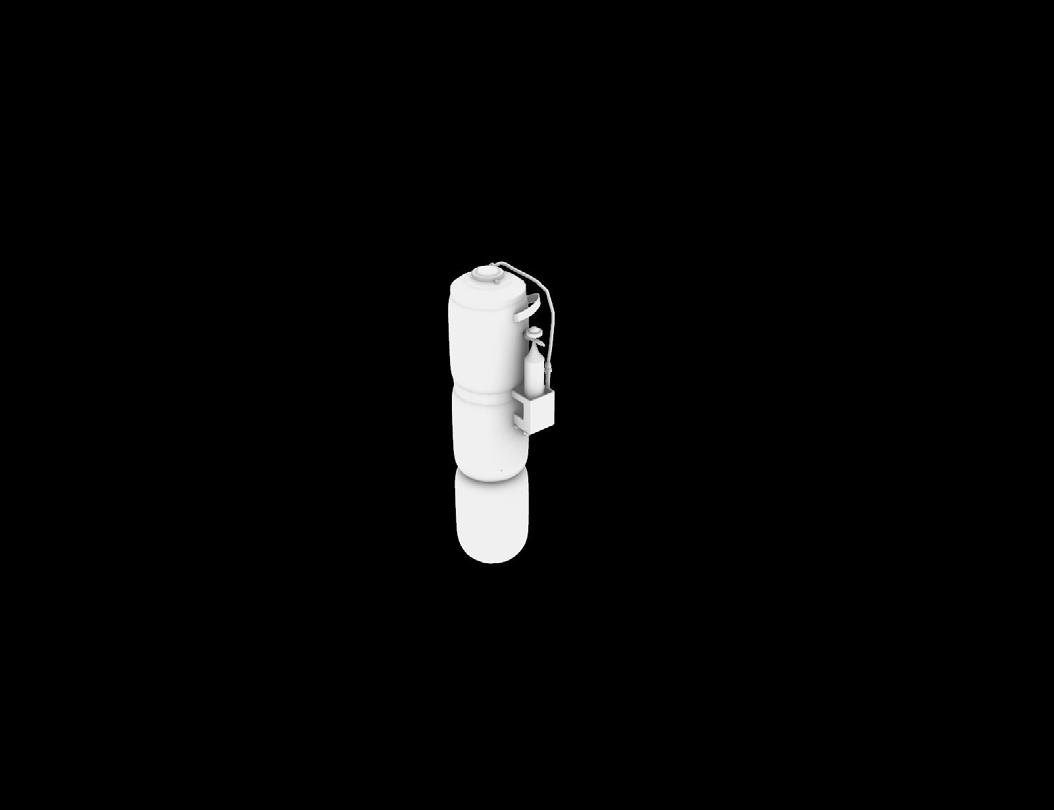
Sports Module

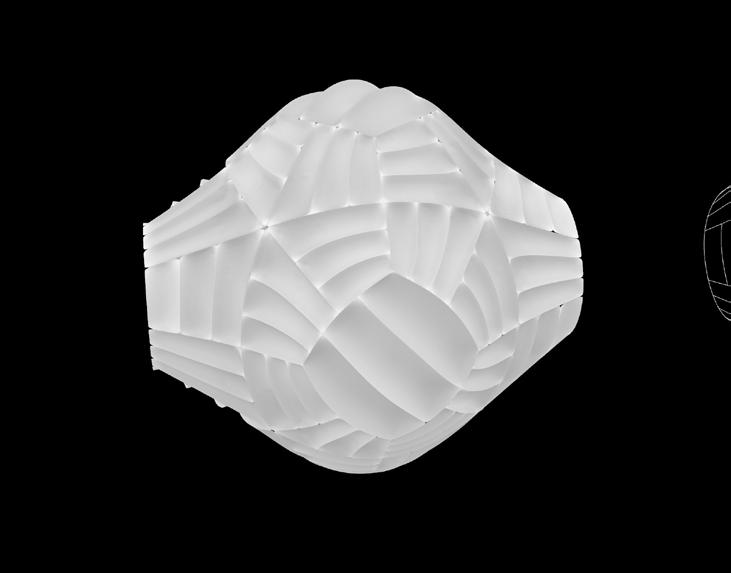
The Exercise Module has the necessary equipment to maintain the shape of the Astronauts. The interior pattern mimics a dynamic and fluid environment. The interior configuration is mirrored, using both sides of the module. The colour of the patterns divides the ground and sky perspective by introducing colours to the patterns.
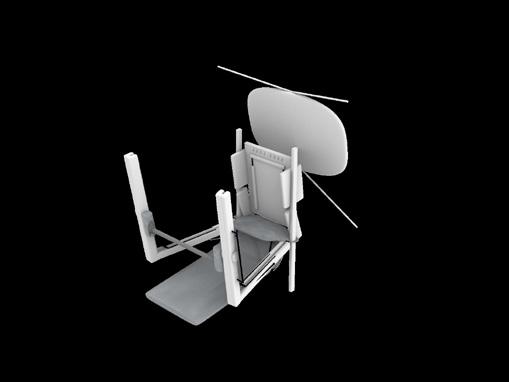
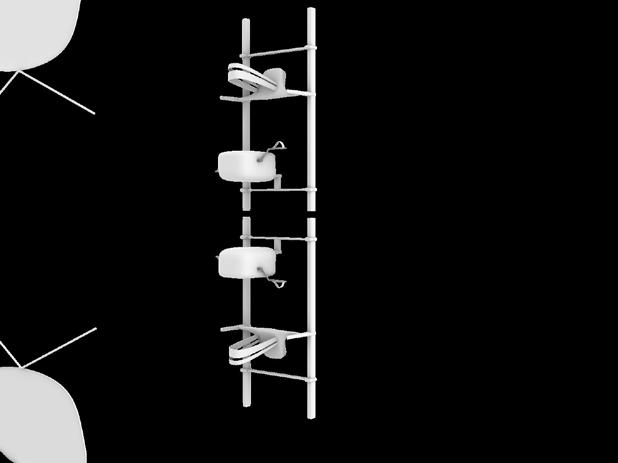
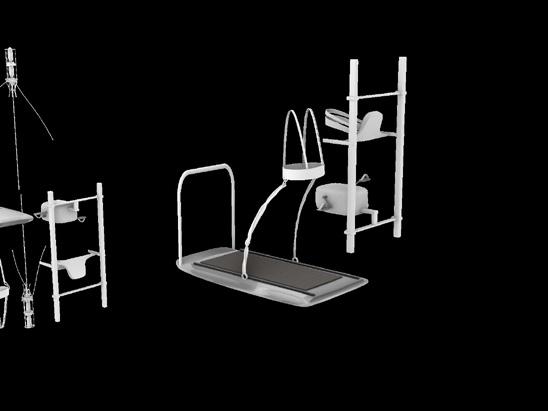
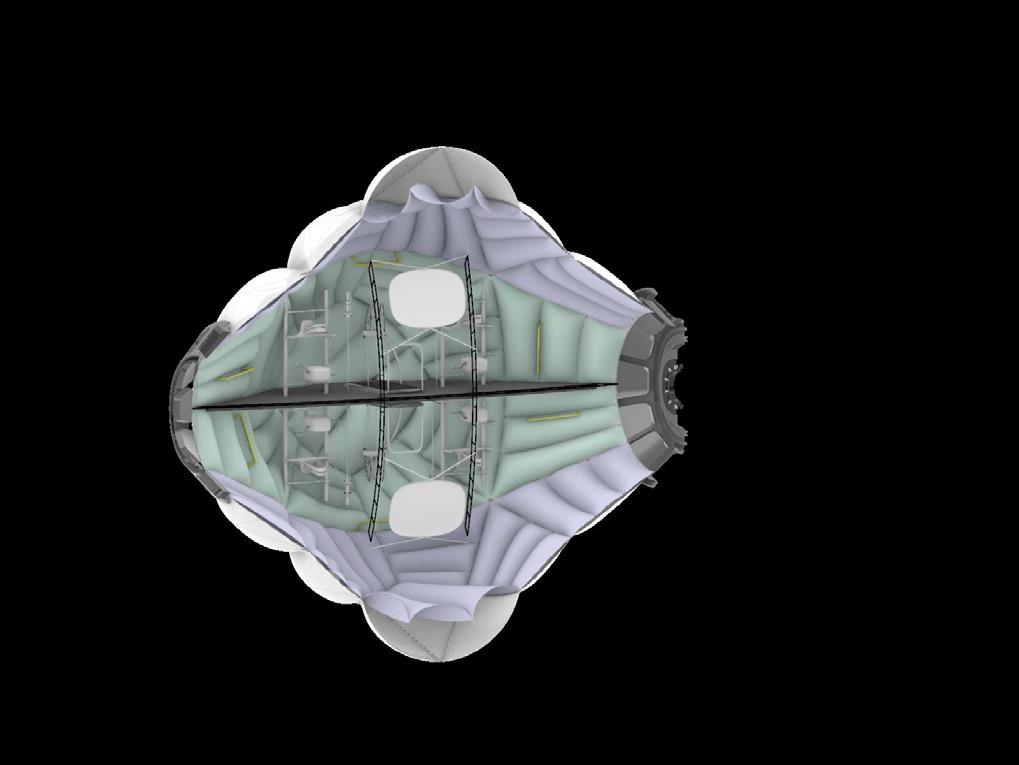
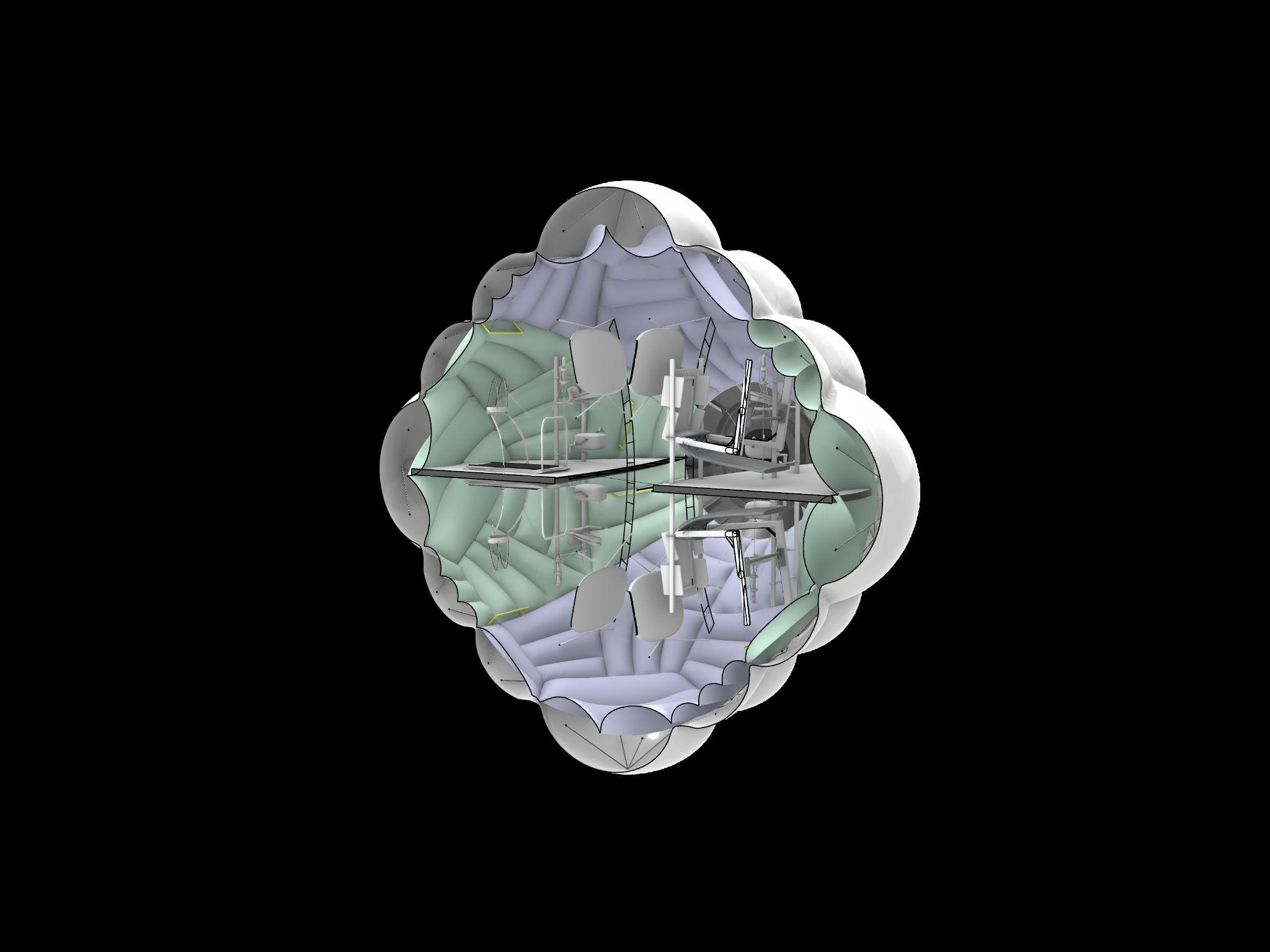 Mirrored Exercise Machines and machines
Sports Equipment
Mirrored Exercise Machines and machines
Sports Equipment
NEBULAE
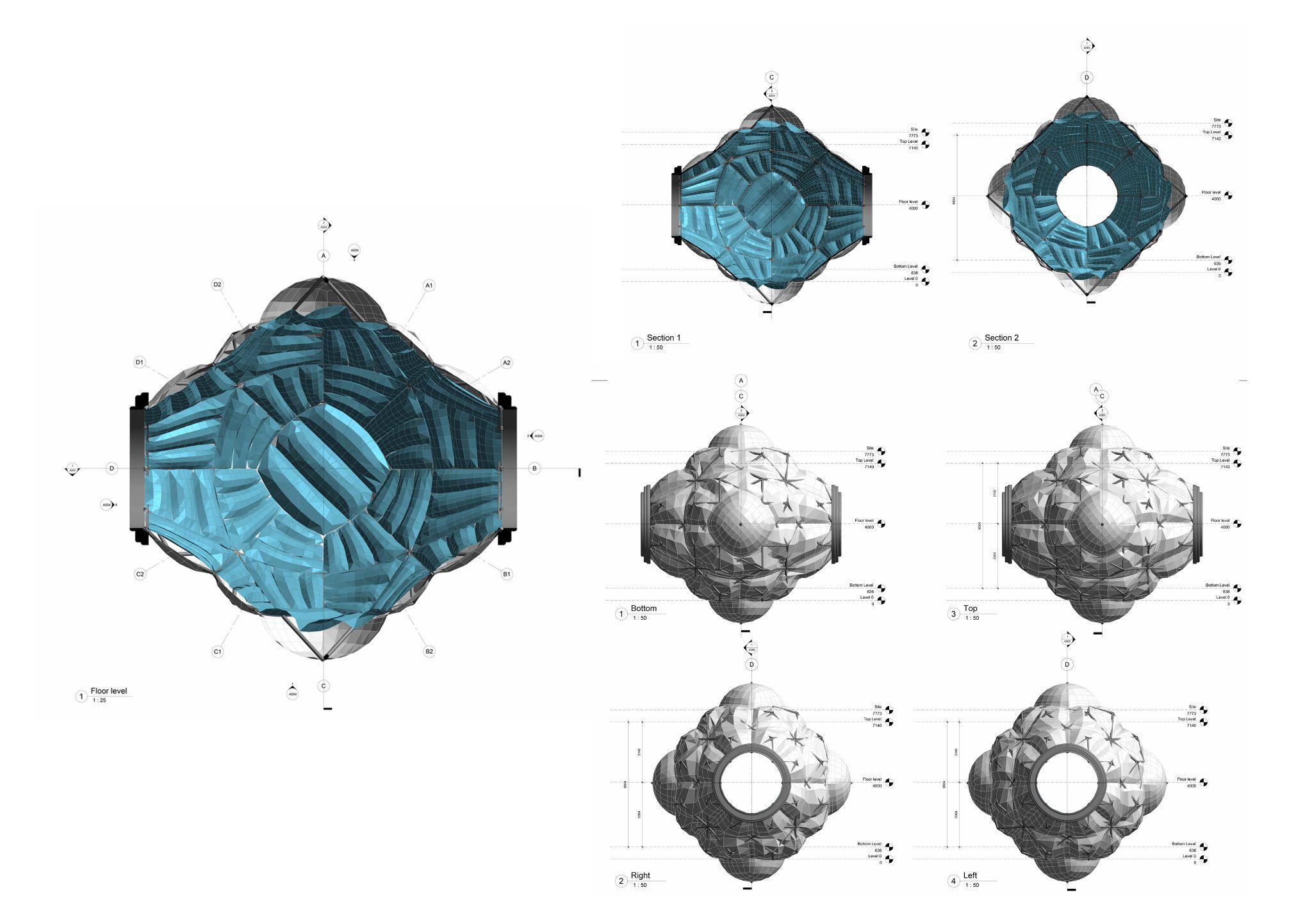
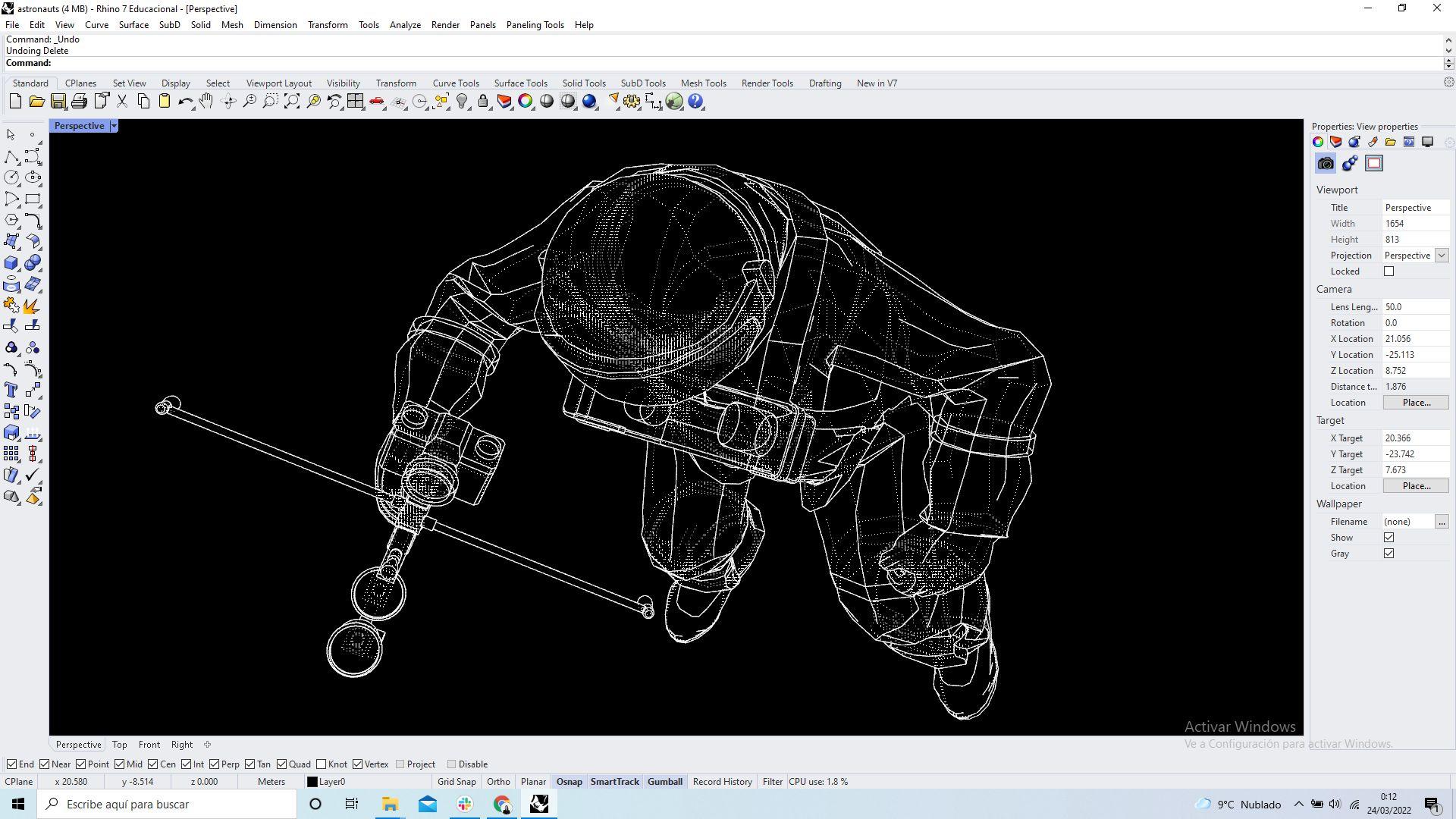
Sports Module Documentations
Using Revit 3D, and Rhino.inside
NEBULAE

Bottom zone Square Inflation Walls linear Stripes Relaxing Space Small 55cm Standard yoga balls
Exterior Inflatable - YOGA Interior Inflatable - YOGA
Meditation Module
 Interior Space Interior Inflatable
Interior Space Interior Inflatable
NEBULAE
Meditation in Space
The Meditation Module presents a calm structure with soft meditation and yoga spaces suitable for microgravity. The interior pattern mimics a fluid and calm environment. The interior configuration is mirrored, using both sides of the module. The colour of the patterns divides the ground and sky perspective by introducing colours to the patterns, representing a warm environment. It is based on the isolation module with bigger openings for space interaction.
NEBULAE Meditation Module Documentations

Using Revit 3D, and Rhino.inside
NEBULAE


Section Exterior Inflatable - CASINO
Exterior Inflatable - CASINO Interior Inflatable - CASINO
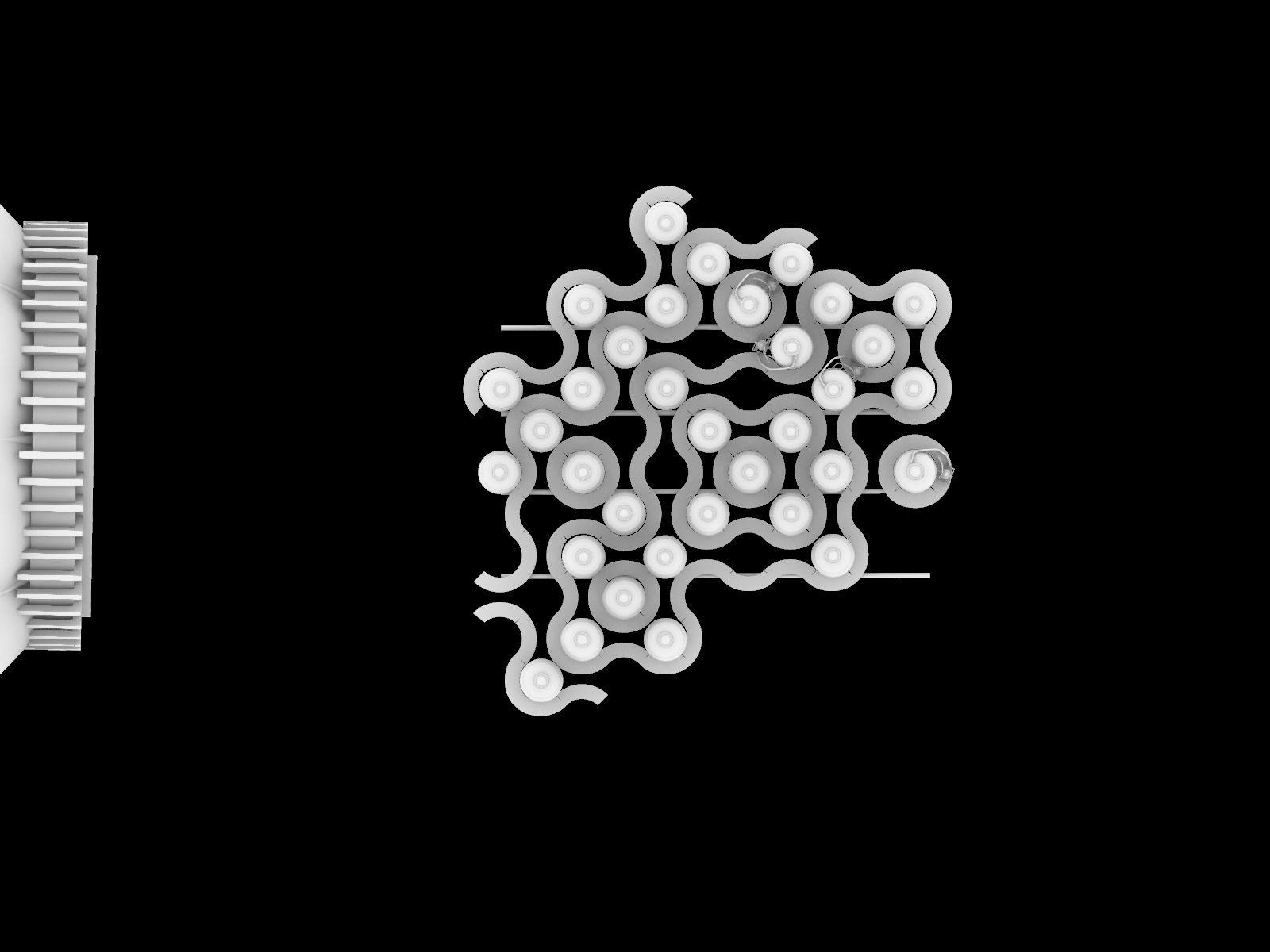
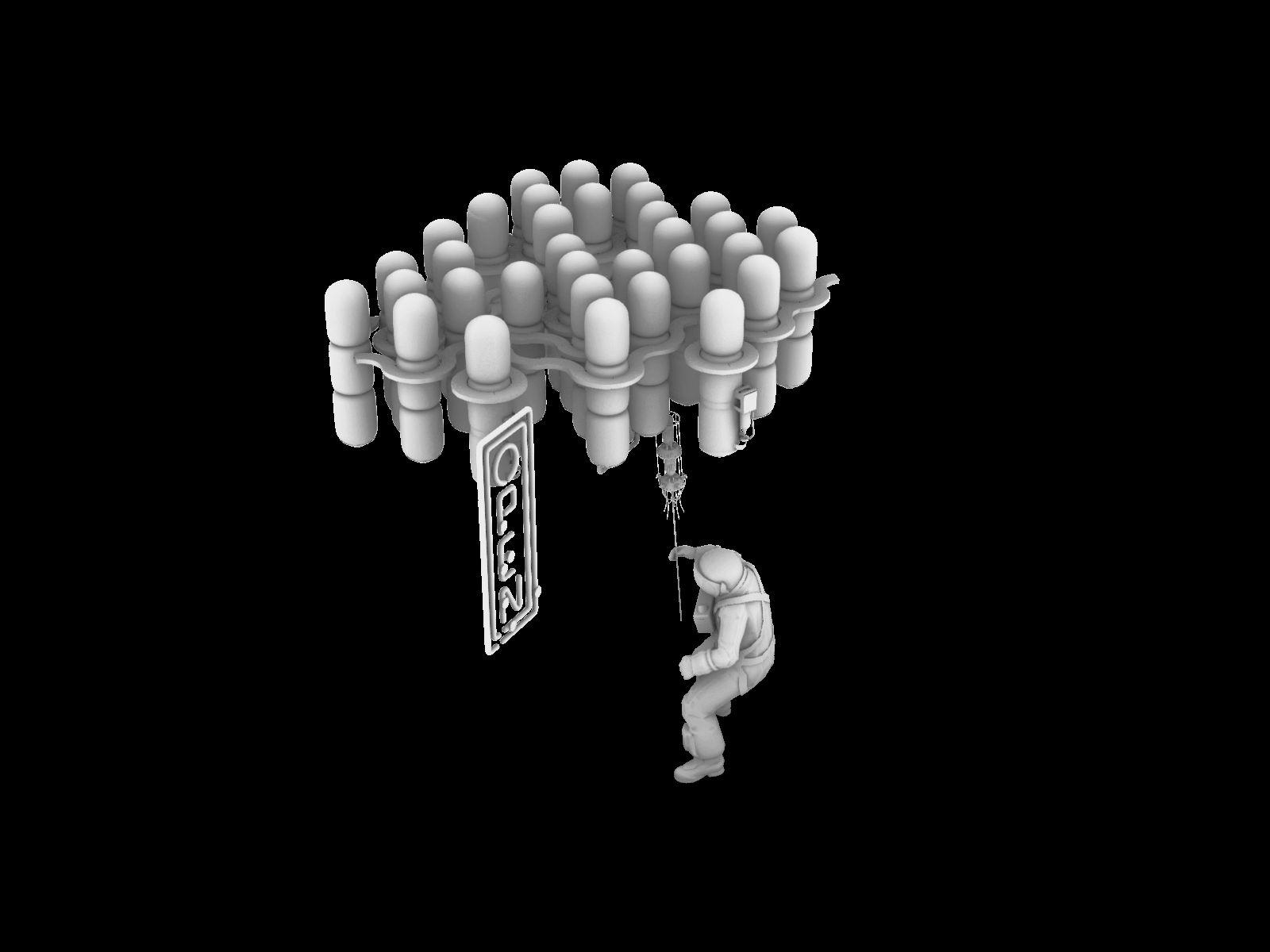
Casino Module

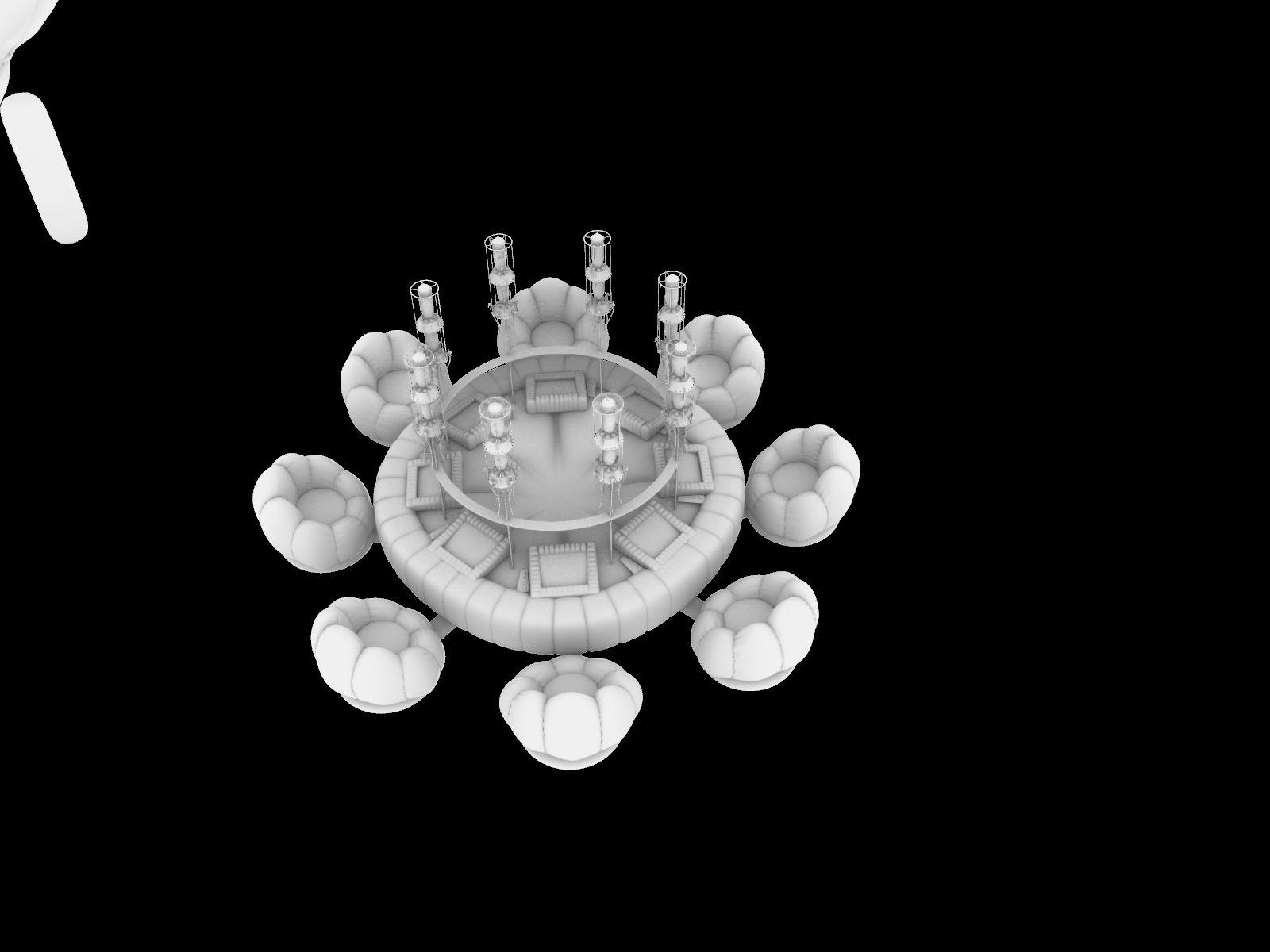

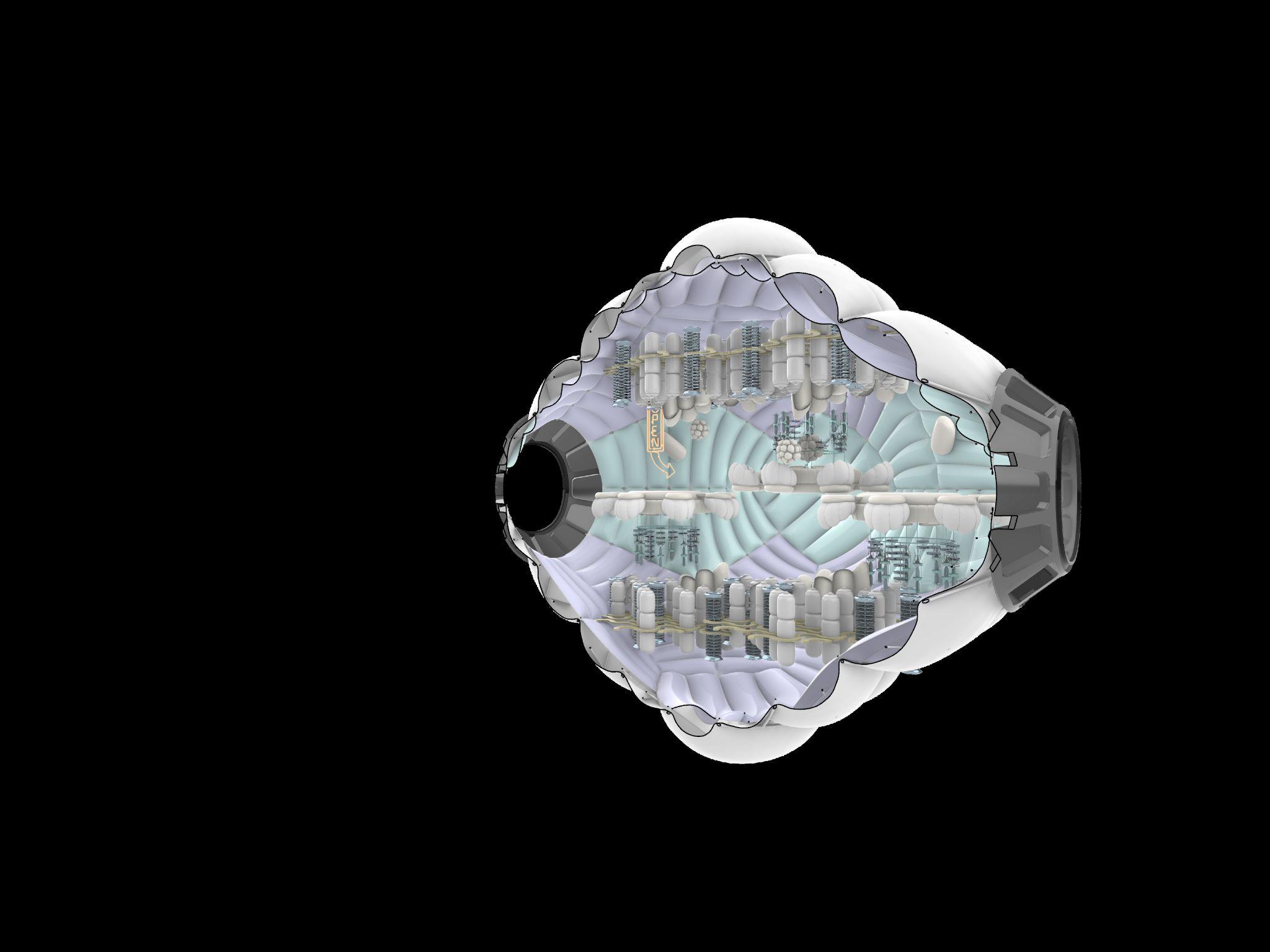
NEBULAE Casino Module



Food Storage Food Drinks
Casino in Space
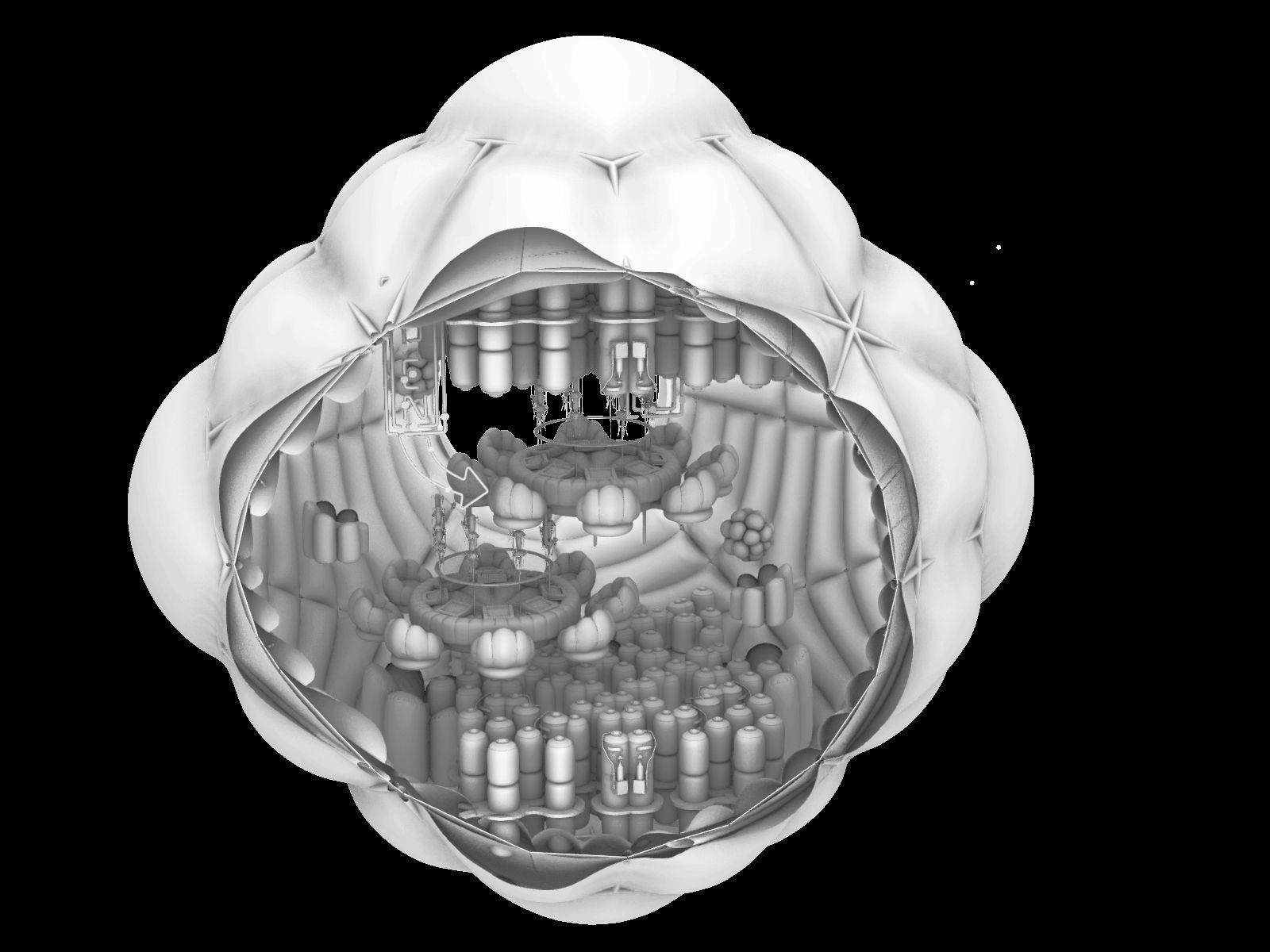
The Casino Module presents a noisy structure with inflatables as seating and table-like furniture. It incorporates space bottles with beverages and food trays designed for space. The interior pattern is fluid, dynamic and colourful. The interior configuration is mirrored, using both sides of the module. The colour of the patterns divides the ground and sky perspective by introducing colours to the patterns, representing a cold but vivid environment. It is based on the night module.

NEBULAE
Casino Module Documentations
Using Revit 3D, and Rhino.inside
NEBULAE
Gaming Module Documentations

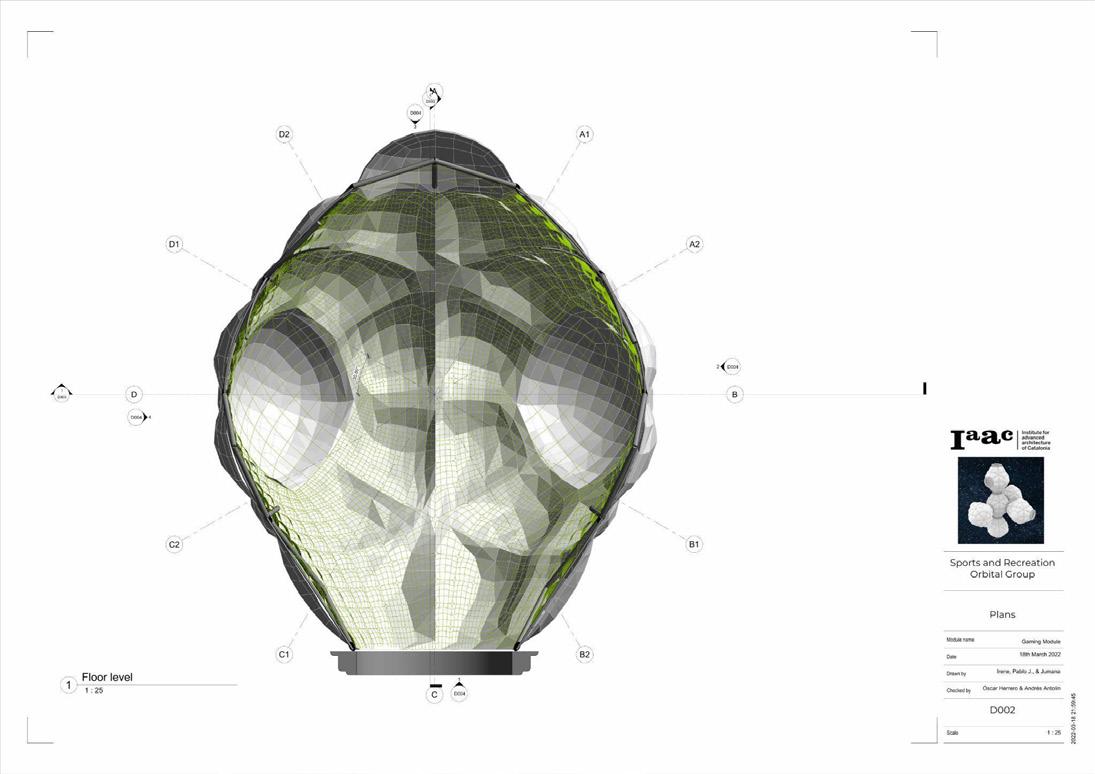
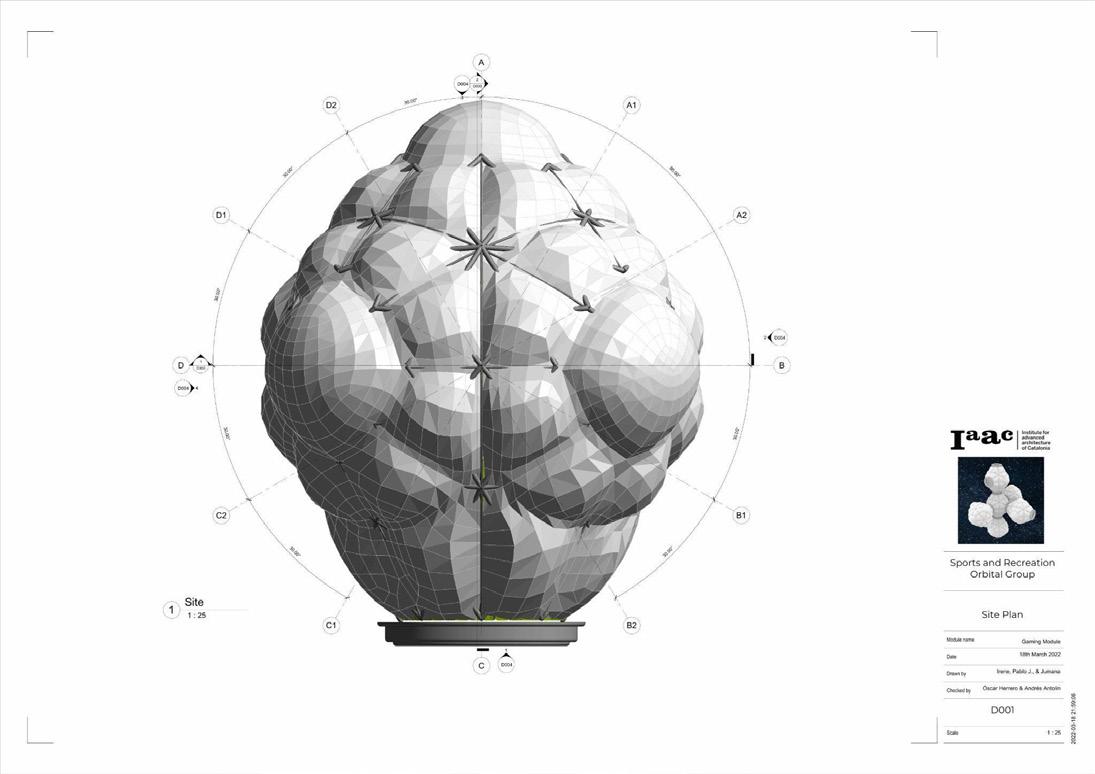

Gaming Module


Gaming + Sports Reading + AR Visuals
NEBULAE
Nebulae: Orbital Space Habitat

FUZZY

CONCEPT EXHIBITION 21 Date: 2007-2012 Location: Ronneby, Sweden Tools: Collage of Photography, Zipatone, scanned materials, photoshop
What’s beyond concept…
A fuzzy, lacking a fixed vague, uncertain concept with all the objects, colors, distinguished elements being sometimes meaningless altogether... The point is not to distract the viewers but to let them think out of the limitations of a concept... like kids in early stages they observe things in their primitive senses but through practical experience they learn to identify and build a correct application of an idea, then related it to other concepts. Now that stage before concept called "a fuzzy concept" which could play a good role in the creative process of forming new ones to understand something... and that's what makes a concept genuine in practical stages.
We must emphasize on the need of "research" using graphic, paintings, digital, etc. experiences as a "laboratory” to create exceptional buildings. And here where we find "problems"... innovative dynamic, fluid, alien or even complex structure shouldn't be a barrier. We should keep on researching in a "Designs cannot be built", that problem could solve the link to what's next!
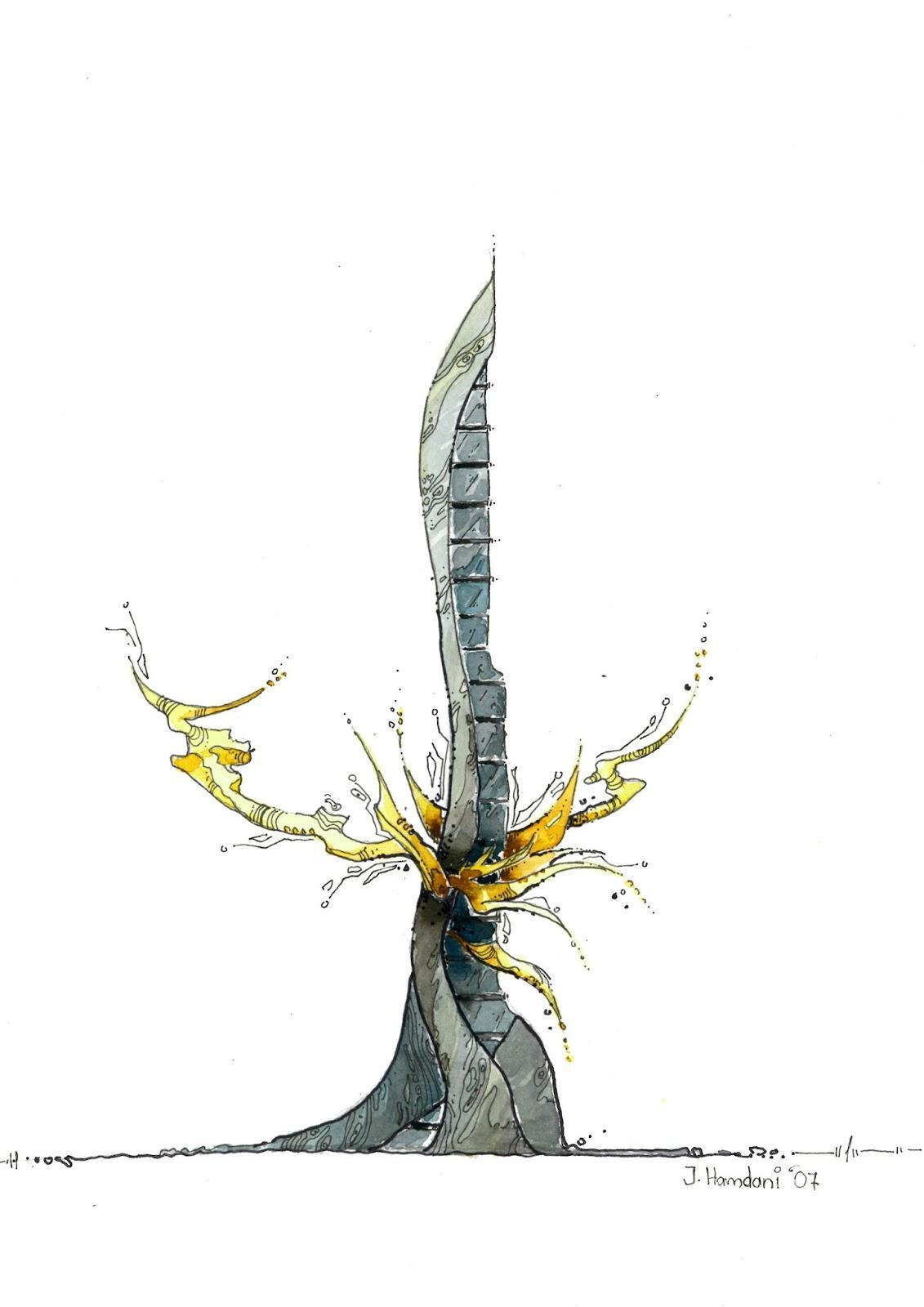
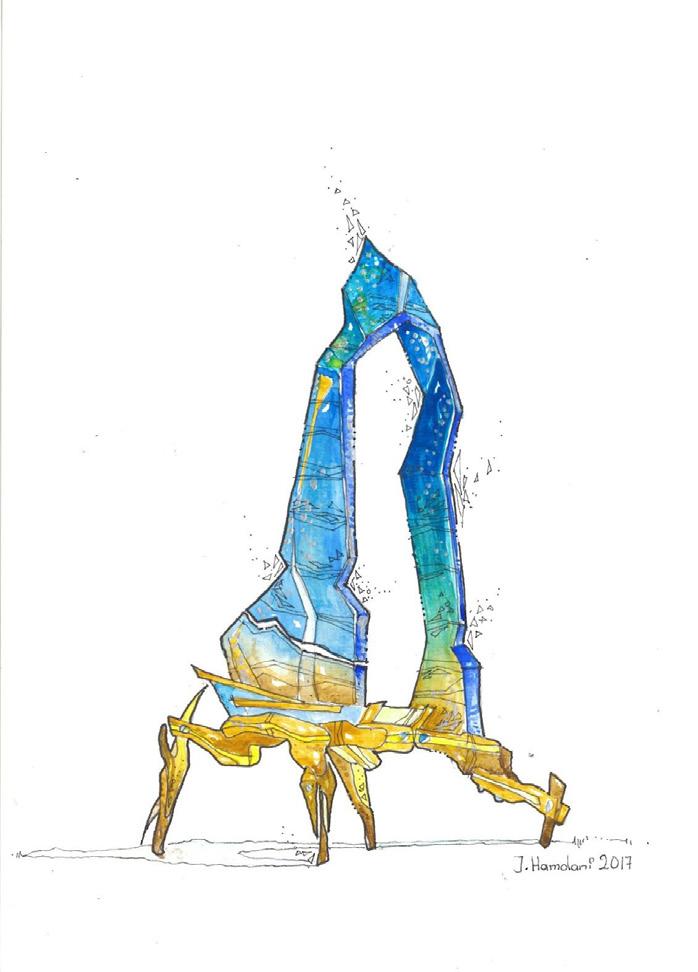
ARCHITECTURAL FANTASIES 22
Date:2007-2017
Project Type: Sketching
Tools: Hand drawings: Watercolors, Ink

Architectural Fantasies is part of an ongoing project Architectural Series Lab
The work is a series of illustrations full of characters, incidents, ideas drawn from war, migration, and diaspora, showing anything seems possible to scramble to repair the damages of the past, to let us imagine to build structures that had been previously inconceivable.
Architectural fantasies also develop the importance of today’s “architect’s research” that stands somewhere between the quest for creative specialness and the need for a network of exchanges with other fields and between the responsibility of the concept and the acceptance of the complexity of our reality (social, economic and anthropological).
The research can play a vital part in the development of current notions about the city as a social organism, the role of technology within it, the importance of beauty and the future survival of higher numbers of people in the context of consuming natural resources.
ARCHITECTURAL FANTASIES





RESEARCH TRIP 23
Date: 2022
Location: Valldaura Self-Sufficient Labs - IAAC, Barcelona, Spain
TOVA
Spain’s first 3D printed building using earth and Crane WASP








 Valldaura Labs is an exploratory project promoted by IAAC in self-sufficient and ecologically aware living that aims to develop a Living Lab for the self-sufficient Habitat.
Biomaterial samples from the Digital Matter studio at IAAC Labs
The Voxel Quarantine Cabin
Catalan vaulted structure
Barcelona Greenhouse
Valldaura Labs is an exploratory project promoted by IAAC in self-sufficient and ecologically aware living that aims to develop a Living Lab for the self-sufficient Habitat.
Biomaterial samples from the Digital Matter studio at IAAC Labs
The Voxel Quarantine Cabin
Catalan vaulted structure
Barcelona Greenhouse