
Project Proposal
Design and Development of Sprite UAV
September 2021

Addis Ababa
Ethiopia
1. Introduction
Spirit is compact and modular design with easily swappable rotors and payloads with new technology upgrades. Setup is quick and easy, allowing for takeoff from any type of terrain. Spirit’s rugged, all-weather it can operate reliably in any terrains, even heavy rain, sleet, snow and sand. It has highly streamlined, compact airframe and portable.
Two identical attach points allow plug-and-play modules to be quickly configured for any mission, and we can also add additional batteries for longer flight times, or swap payload modules to suit each mission.

Whether someone is an active outdoor enthusiast, a serious professional photographer or a commercial operator it is more preferable technology in terms of weight and handling. [2]
Modular design of a sprite UAV is highly upgradeable design which allows it to easily fit almost anywhere. The rotor blades automatically fold against the side of the airframe, so we can easily slip it into a backpack and is more portable to carry it. This is a common design available in market.
It has not exposed delicate electronics or rigid propellers. Its body is made up of tough polycarbonate construction can take a beating, and critical components are sealed inside so that sensitive parts don't get wet. The sprite should support nearly all of the features of the open source Mission Planner and flight control software. These features include waypoint navigation, follow me, circle, return-to-home and structure scanning. They are can be modified if there is an access to the components. [3]
With the motor off, the dual rotors automatically fold down, allowing the drone to easily fit in a backpack without the worry of fragile parts getting damaged. [4]
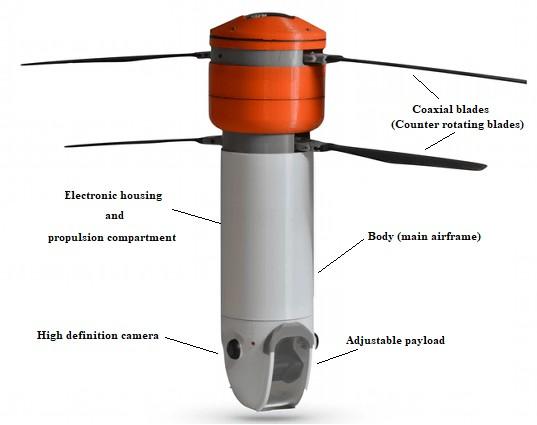
The main components of sprite UAV with high definition camera.
Two flight control methods are used in Sprite UAV design namely conventional real-time controller or fully autonomous GPS navigation. Full-function autopilot, including waypoint navigation, survey, circle, region of interest, "follow me", and return to home modes. Real-time telemetry includes firstPerson-View (FPV), ready fully enclosed core, compact and ultra-durable. The rotor is stored automatically when not in use and it looks like a water bottle or something. [6]
Sprite is as portable as plastic 1ltr bottles and consists of the following features;
Fully autonomous autopilot with GPS and multiple flight modes
Fully enclosed, compact, ultra-durable
Real-time telemetry
Available 3-axis stabilized gimbal
First-Person-View (FPV) ready
Sprite UAV is ideal for outdoor adventurers, professional photographers, and a wide range of special missions in rugged, harsh environments including:
Emergency services and disaster recovery
Search and rescue
Security and law enforcement
Environmental management and conservation
Urban planning and engineering
Offshore and overwater inspection
The aim of this project is to develop an ESSTI model Sprite UAV which is used for multipurpose payload such as with spraying system. The project is planned to be designed in ESSTI and body (airframe) manufacturing will be out resourced.
Basic specifications and parameters
We will design Sprite to be first and foremost portable and capable of spraying pesticides or chemicals on agricultural fields against pest’s infestation. A fiberglass airframe can be made to handle the rotor system with the required technical strength and rigidity. The sensitive electronic components should be separated from typical sources of interference like motors and speed controllers.
Sprite UAV basic dimensions
Basic dimensions
Dimension of L.G 110mmX220mm
Width (maximum) 60mm
Height (Total) 350mm
Overall volume 60mmX60mmX350mm
Diameter (max) 60mm
Weight max 5kg max
Weight of sprite body 1.5Kg
Rotor diameter 110mm
Note: The actual design will be modified after the detail design and c.g calculation

Endurance (single battery) > 38 minutes (22 minutes with max payload)
Endurance (two batteries) > 53 minutes (28 minutes with max payload)
Maximum recommended forward speed > 60 mph (100 kph, 27 m/sec)
Operating temperature range: -40 to 130F (-40 to 54C)
Maximum operating altitude: above 300 meters
Standard autopilot: Pixhawk Cube & Arducopter
Note: There will be changes in the parameters according to the design and availability of component types.
2. General Objectives
To design and develop a Sprite UAV for spraying system (Pesticides, chemicals or else).
3. Specific Objective
Design of a Sprite UAV.
Design of a spraying system payload.
Selection of basic electronic components.
All of the features of the open source, Mission Planner and flight control software.
Assembling and testing of the sprite UAV
Field testing of the sprite UAV
4. Methodology
The methodology to be followed in developing the new project is:
Clearly identifying the basic parameters and specification of the sprite UAV
Model design configuration and basic design parameters
Detail design of the sprite UAV using AUTODESK including payload fixture
3D modeling design and simulation of the model
Selecting and assessing industries/private shops for body (Airframe) manufacturing
Out resourcing
Components and software selection
Ordering basic components for purchase
Evaluating the project status
Checking the availability and completeness of the components
Assembling the sprite UAV
Functional testing (Operability of the system)
Ground flight checkup
Flight testing (Low altitude)
Flight testing (High altitude and all operations)
5. The Project Execution Area
All the project design phases will be completed at ESSTI, airframe production will be out resourced (Optional) and assembling will be done at ESSTI and finally testing will be conducted at ENTOTO open fields.
6. Budget analysis and personnel
6.1
Cost
6.2
7 Timeline and Milestones for the Entire Project
The overall activity time plan of the research project is presented as follow: -
S/N Main Research Activities
1 Defining the basic parameters of the Quadcopter
2 Collecting Sprite UAV literature reviews and descriptions
3 Define the main model configurations
4 Preparation of proposal for “Design and Development of Sprite UAV”
5 Collecting Sprite UAV literature reviews and basic data for final project paper
6 Basic and detail designs of the model Sprite UAV using AUTODEK
7 3D modeling of the model Sprite UAV
8 Preparation of draft project paper for the Sprite UAV (Initial)
9 Identification of basic components required for our project including the airframe according to the design.
10 Ordering main components for purchase
11 Preparation of the second draft project paper for the Sprite UAV
12 Assessing and ordering the production of airframe (main body) at home
13 Project evaluation
14 Rectifying and solving
problems during the process (if any)
15 Finalizing the final project paper
16 Checking the completeness of the components
17 Preparation of components for assembling
18 Assembling of Sprite UAV
19 Functional testing (Operability of the system)
20 Ground flight checkup
21 Flight testing (Low altitude)
22 Flight testing (High altitude and all operations)
23 Final project evaluation
8. References
1. Available at https://www.thingiverse.com/thing:1094939
2. Available at https://ascentaerosystems.com/spirit/
3. Available at https://www.worthpoint.com/worthopedia/ascent-aerosystems-sprite-drone-fpv1915258086
4. Available at http://www.geniusny.com/news/genius-ny-finalist-ascent-aerosystemsmanufactures-drones-in-central-new-york
5. Available at https://www.kickstarter.com/projects/ascentaerosystems/sprite-the-portablerugged-totally-different-small
6. Available at https://www.thingiverse.com/thing:1094939