
Implementation of path optimization algorithm for the optimal number of unmanned aerial vehicles used within goods delivery
 Jakub Wysocki, Computer Science, Department of Computer and Information Sciences
Jakub Wysocki, Computer Science, Department of Computer and Information Sciences
Project Aims
• To develop a UAV simulation with a usage of path optimization algorithm
• To calculate the optimal number of Unmanned Aerial Vehicles used within goods delivery
Project Details - Research
• The study presents a comprehensive analysis of pathfinding techniques for drone deliveries, focusing on traditional Grid-based and emergent Artificial Intelligence Techniques.
Project Details – Practical Work

• A 2-D grid simulation was conducted, incorporating the A* and Dijkstra's algorithm along with a modified algorithm developed specifically for this study.
• The simulation incorporated modified functions to visualize multiple drones simultaneously, employing two distinct approaches:
Ø Sequential visualization, showing each path one after the other.
Ø Concurrent visualization, displaying all paths simultaneously.
• The simulation was employed to compute the ideal fleet size under real-world constraints.
Project Details/Results
• It recognizes the growing use of Unmanned Aerial Vehicles (UAVs) in delivery services and the related pathfinding complexities due to diverse constraints.
• The research investigates a range of algorithms, including Swarm Intelligence algorithms, A* algorithm, and Dijkstra's algorithm.
Findings
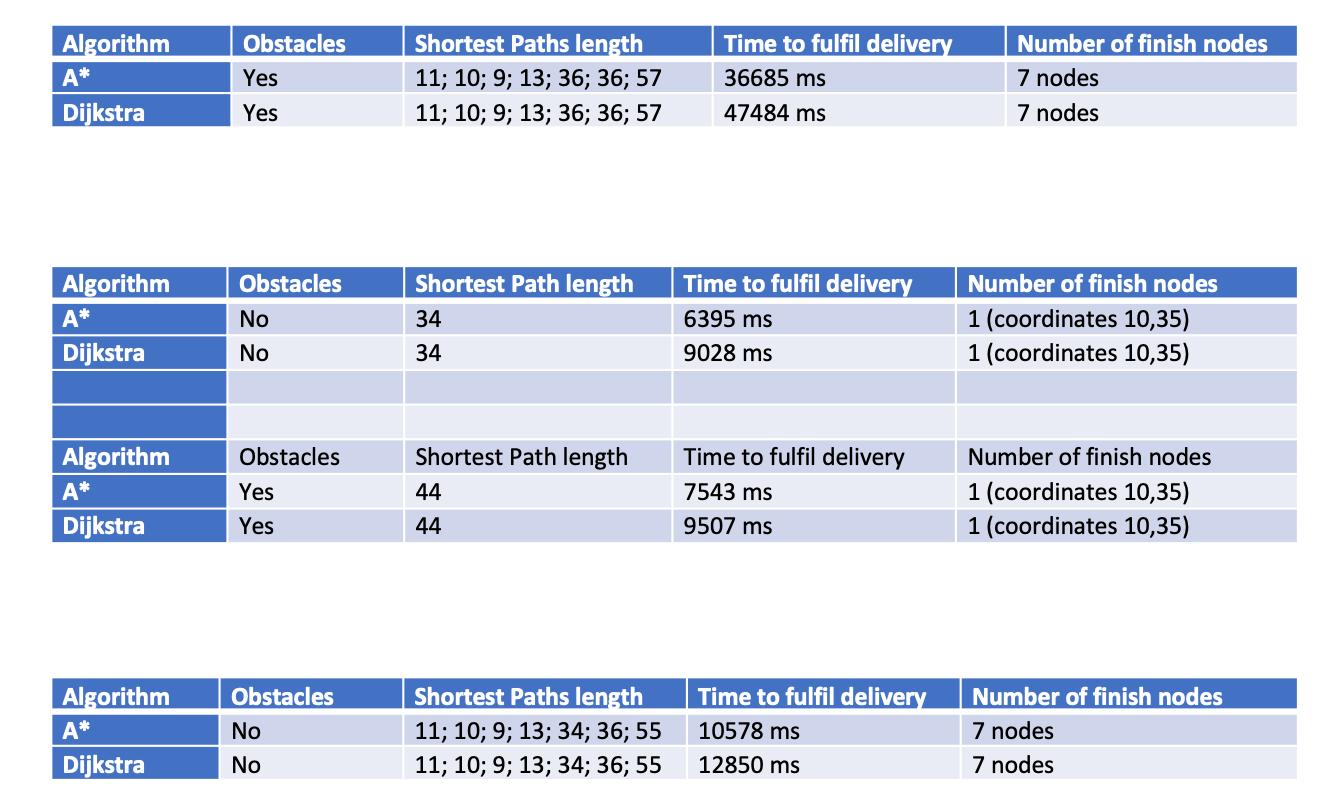
• The results were then evaluated, compared, and benchmarked, with findings indicating that the A* algorithm outperformed Dijkstra's in pathfinding efficiency and computational performance.
• Two distinct visualization approaches - sequential and concurrent - were used. Sequential visualization demonstrated the pathfinding process step by step but was slower, while concurrent visualization showed multiple paths at once, although it presented challenges in visual clarity.
• An algorithm was developed with the aim to eliminate this collision risk by circumventing obstructed shortest paths from prior routes.
Conclusions/Future Work
• Visualization methods provided a detailed understanding of how each algorithm functions, but the collision issues highlighted the need for a more complex solution, such as the proposed algorithm or a Multi-Agent Path Finding (MAPF) approach.
• A* was identified as the best solution for finding the shortest path between drone flights for both single and multiple end nodes, but collision detection requires an adjusted MAPF approach.
• Future work could center on strategies to prevent drone collisions, either through an enhanced version of the developed algorithm, improved inter -drone communication, or by integrating dynamic rerouting algorithms that consider the real-time positions and planned routes of other drones.
Bibliography
Burwell, K., Jordi, P. and Prendinger, H. (2019) Multi-agent pathfinding for Unmanned Aerial Vehicles. thesis. Available at: https://upcommons.upc.edu/handle/2117/176279 (Accessed: 20 January 2023).
• It also explores the field of Multi-Agent Pathfinding with the aim of determining the optimal number of UAVs for delivery operations
Islam, S. and Razi, A. (2019) ‘A path planning algorithm for collective monitoring using autonomous drones’, 2019 53rd Annual Conference on Information Sciences and Systems (CISS) [Preprint]. doi:10.1109/ciss.2019.8693023.
Kondo, K. et al. (2023) Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments [Preprint]. doi:10.48550/arXiv.2303.06222.
Table 2. A* and Dijkstra's algorithms comparison with one finish node Table 3. Comparison of both algorithms with multiple nodes at once approach Table 1. A* and Dijkstra’s algorithms results comparison with seven finish nodes