ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com

ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
*Rajni Barman, $Prof. D. K. Meda
*M.E. Scholar, $Assistant Professor
* , $ Jabalpur Engineering College
*rajni_barman788@yahoo.com, $dev.meda@gmail.com
Abstract: Satellite pictures in course of catching and transmitting are habitually debased because of station impacts or unsure conditions. These impacts present diverse commotion examples, for example, Additive White Gaussian Noise, Salt and Pepper Noise and Mixed Noise. Accordingly, recovered pictures are profoundly commotion debased in light of the fact that the picture substance are progressively constricted or enhanced. The determination of ideal picture rebuilding and separating procedure depends to know about the qualities of corrupting framework and commotion design in a picture. In this paper, Extended Recursive Least Square (ERLS) versatile calculation and Kernel Diffeomorphism Filter (KDF) is utilized for picture reclamation from exceedingly clamor adulterated pictures. The usage of proposed philosophy is being done by assessing the commotion examples of remote channel through arranging System Identification with ERLS versatile calculation. At that point, these assessed clamor designs are dispensed with by arranging Signal Enhancement with ERLS calculation. The reestablished pictures are worked for further de-noising and upgrade methods. The picture reclamation and further handling calculations are mimicked in MATLAB condition. The execution is assessed by methods for Human Visual System, quantitative measures regarding MSE, RMSE, SNR and PSNR and by graphical measures. The trial results show that RLS versatile calculation effectively disposed of clamor from mutilated pictures and conveyed an upright assessment without copious corruption in execution.
Keywords: KDF: Kernel diffeomorphism filter, ERLS: Extended Recursive least square, LMS: Least mean square, FIR: Finite Impulse Response.
Discrete-time (or computerized) channels are pervasive in the present satellite picture handling applications. Channels are utilized to accomplish wanted ghostly qualities of a satellite picture, to dismiss undesirable satellite pictures, similar to clamor or interferers, to lessen the bit rate in satellite picture transmission, and so on. The thought of making channels versatile, i.e., to change parameters (coefficients) of a channel as indicated by some calculation, handles the issues that we may not progress of time know, e.g., the attributes of the satellite picture[6] LMS, RLS and Kernel diffeomorphism[3] are the prevalent versatile channels techniques for straight frameworks. Expanded Kernel diffeomorphism channel is a decent decision when we required versatile channel in non direct Systems (for example OFDM). In a transversal filter of length N, as depicted in fig. 1, at each time n the output sample y[n] is computed by a weighted sum of the current and delayed input samples x[n], x[n − 1], . . .
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
[ ] ∑ [ ] [ ]
Here, the ck[n] are time dependent filter coefficients (we use the complex conjugated coefficients ck[n] so that the derivation of the adaption algorithm is valid for complex satellite images, too). This equation re-written in vector form, using x[n] = [ x[n], x[n − 1], . . . , x[n − N + 1] ]T, the tap-input vector at time n, and c[n] =[ c0[n], c1[n], . . . , cN−1[n] ]T , the coefficient vector at time n, is y[n] = cH[n]x[n]
Both x[n] and c[n] are column vectors of length N, cH[n] = (c*)T [n] is the hermitian of vector c[n] (each element is conjugated *, and the column vector is transposed T into a row vector).
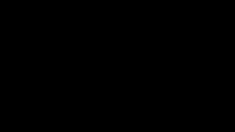
x[n x[n-1] x[n-2] x[n-N+1]
�� �� �� �� [��] �� [��] ��2[��] ���� [��]
[11]
In the extraordinary instance of the coefficients c[n] not relying upon time n: c[n] = c the transversal channel structure is a FIR channel of length N. Here, we will, be that as it may, centre on the case that the channel coefficients are variable, and are adjusted by an adjustment calculation.
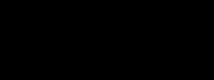
The LMS (least mean squares)[4] calculation is a guess of the steepest drop calculation which utilizes a quick gauge of the angle vector of a cost capacity. The gauge of the slope depends on test estimations of the tap-input vector and a blunder satellite picture. The calculation repeats over every coefficient in the channel, moving it toward the approximated inclination. For the LMS calculation [4] it is important to have a reference satellite picture d[n] speaking to the ideal channel yield. The contrast between the reference satellite picture and the genuine yield of the transversal channel (eq. 2) is the mistake satellite picture e[n] = d[n] − cH[n]x[n]. A schematic of the learning setup is depicted in fig. 2
FIR filter
x[n] c[n]
LMS adaption Algorithm
y[n]
d[n] e[n]
Figure 2: Adaptive transversal filter learning [8]
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
Summary of the LMS algorithm [4]
1. Filter operation: y[n] = cH[n]x[n]
2. Error calculation: e[n] = d[n] − y[n] where d[n] is the desired output
3. Coefficient adaptation: c[n + 1] = c[n] + μ e*[n] x[n]
The RLS (recursive least squares)[3] calculation is another calculation for deciding the coefficients of a versatile channel. As opposed to the LMS calculation, the ERLS calculation [3] utilizes data from all past information tests (and not just from the present tap-input tests) to appraise the (reverse of the) autocorrelation framework of the information vector.
ERLS channel plan: To diminish the impact of info tests from the far past, a weighting factor for the impact of each example is utilized. This weighting factor is presented in the cost capacity
[ ] ∑ | [ ]|2
Where the error satellite image e[i, n] is computed for all times 1 ≤ i ≤ n using the current filter coefficients c[n]: e[i, n] = d[i] − cH[n]x[i].
When the squared error for all sample times i up to current time n is considered in the cost function J equally. If <1 the influence of past error values decays exponentially: method of exponentially weighted least squares. is called the forgetting factor.
Analogous to the derivation of the LMS algorithm we find the gradient of the cost function with respect to the current weights
[ ] ∑ ( ( [ ] [ ] ( [ ] [ ] [ ])
We now, however, do trust in the ability to estimate the expected values E(dx) = p and E(x xH) = R with sufficient accuracy using all past samples, and do not use a gradient descent method, but immediately search for the minimum of the cost function by setting its gradient to zero [ ] . The resulting equation for the optimum filter coefficients at time n is
[n]c[n] = z[n], c[n] = 1[n] z[n], With [ ] ∑ [ ] [ ] [ ] ∑ [ ] [ ]
Both [n] and z[n] can be computed recursively: [n] = [n − 1] + x[n] xH[n] And
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
z[n] = z[n − 1] + d*[n] x[n].
To find the coefficient vector c[n] we, however, need the inverse matrix [ ]
Using a matrix inversion lemma [1] a recursive update equation for P[n] = [ ] is found as: P[n] = 1 P[n − 1] + 1 k[n] x[n], [ ] [ ] [ ] [ ] [ ] [ ]
Finally, the weights update equation is c[n] = c[n − 1] + k[n] ( d*[n] − xH[n]c[n − 1] )
The RLS calculation [3] is computationally more intricate than the LMS calculation [4]. Note, be that as it may, that due the recursive refreshing the reversal of framework [n] isn't important (which would be an impressively higher computational burden). The RLS calculation ordinarily demonstrates a quicker combination contrasted with the LMS calculation.
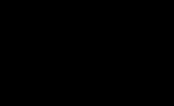
The Kernel diffeomorphism channel [2] evaluates a procedure by utilizing a type of criticism control: the channel appraises the procedure state sooner or later and after that gets input as (loud) estimations. In that capacity, the conditions for the Kernel diffeomorphism[2] channel fall into two gatherings: time update conditions and estimation update conditions. The time update conditions are in charge of anticipating forward (in time) the present state and mistake covariance evaluations to acquire from the earlier gauges for whenever step. The estimation update conditions are in charge of the input for example for consolidating estimation into from the earlier gauge to get an improved a posteriori gauge. The time update conditions can likewise be thought of as indicator conditions, while the estimation update conditions can be thought of as corrector conditions. Without a doubt the last estimation calculation takes after that of an indicator corrector calculation for tackling numerical issues as appeared in Figure 3.
Time Update ("Predict")
Measurement Update ("Correct")
[2]
Part diffeomorphism channel plan: In request to utilize the Kernel diffeomorphism channel to evaluate the inside condition of a procedure given just a succession of uproarious perceptions, one must model the procedure as per the structure of the Kernel diffeomorphism channel [2]. This implies determining the accompanying grids: Fk, the stateprogress show; Hk, the perception demonstrate; Qk, the covariance of the procedure commotion; Rk, the covariance of the perception clamor; and once in a while Bk, the control-input display, for each time-step, k, as portrayed underneath.
The Kernel diffeomorphism filter model assumes the true state at time k is evolved from the state at (k 1) according to
Where
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
Fk is the state transition model which is applied to the previous state xk 1; Bk is the control-input model which is applied to the control vector uk; wk is the process noise which is assumed to be drawn from a zero mean-multivariate normal distribution with covariance Qk
( )
At time k an observation (or measurement) zk of the true state xk is made according to
Where Hk is the observation model which maps the true state space into the observed space and vk is the observation noise which is assumed to be zero mean Gaussian white noise with covariance Rk
( )
In estimation hypothesis, the all-encompassing Kernel diffeomorphism channel (KDF) is the nonlinear adaptation of the Kernel diffeomorphism channel which linearizes[7] around a gauge of the present mean and covariance. On account of very much characterized progress models, the KDF has been considered.
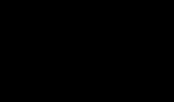
Figure 4: working of Extended Kernel diffeomorphism filter (KDF)[7]
The figure 4 appeared above is the fundamental working of a versatile Kernel diffeomorphism channel. The Kernel diffeomorphism channel monitors the assessed condition of the framework and the change or vulnerability of the gauge. The gauge is refreshed utilizing a state change model and estimations. Indicates the gauge of the framework's state at time step k before the k-th estimation yk has been considered; is the relating vulnerability.
Broadened Kernel diffeomorphism channel conditions: In the all-encompassing Kernel diffeomorphism[2] channel, the state change and perception models need not be straight elements of the state but rather may rather be differentiable capacities.
( )
( )
Where wk and vk are the procedure and perception commotions which are both thought to be zero mean multivariate Gaussian clamors [10] with covariance Qk and Rk individually. The capacity f can be utilized to process the anticipated state from the past gauge and comparatively the capacity h can be utilized to figure the anticipated estimation from the anticipated state. In any case, f and h can't be connected to the covariance legitimately. Rather a network of halfway subsidiaries (the Jacobian) is figured.
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
At each time step, the Jacobian [9] is assessed with current anticipated states. These networks can be utilized in the Kernel diffeomorphism channel conditions. This procedure basically linearizes[7] the non-straight capacity around the present gauge.
Table 1: KDF Prediction [11]
Predicted state estimate ̂ | (̂ | )
Predicted covariance estimate |
Table 2: KDF updating [11]
Innovation or measurement residual ̃ (̂ | )
Innovation (or residual) covariance |
Near-optimal Kernel diffeomorphism gain |
Updated state estimate ̂ | ̂ |
Updated covariance estimate | ( ) |
Where the state transition and observation matrices are defined to be the following Jacobeans [8] | | | |
D. Arbel et al [2] The nature of satellite pictures proliferating through the air is influenced by marvels, for example, dispersing and assimilation of light, and choppiness, which debase the picture by obscuring it and lessening its complexity. The barometrical Wienerfilter, which rectifies for disturbance obscure, airborne haze and way brilliance at the same time, is executed in the advanced rebuilding of Landsat Thematic Mapper (TM) symbolism. Advanced reclamation results for Landsat TM symbolism utilizing the air Wiener channel were introduced before. Here, another methodology for advanced reclamation of Landsat TM symbolism is introduced by executing a Kalman channel as an air channel, which rectifies for disturbance obscure, airborne haze and way brilliance at the same time. Choppiness MTF is determined from meteorological information. Vaporized MTF is predictable with optical profundity. The result of the two yields air MTF, which is executed in both the environmental Wiener and Kalman channels [2]. Reclamation improves both resolvable detail and differentiation. Rebuilding efforts are very evident even under clear climate conditions. Despite the fact that vaporized MTF is overwhelming, marginally better outcomes are gotten when the state of barometrical MTF incorporates choppiness, notwithstanding that of airborne MTF, as appeared by the utilization of criteria for reclamation achievement. As a rule, the Kalman reclamation is prevalent.
Bassel Marhaba et al [1] the satellite symbolism is imperative in a few fields, for example, security, horticulture and different fields. As like as different pictures, satellite pictures are liable to be corrupted because of commotion impacts that happen amid the catch as well as transmitting process. These impacts will cause modified clamor styles, for example, spot commotion, Gaussian commotion and others. The fundamental reason for the picture reclamation process is to take out the commotion that present in the picture. Scientists utilized straight and nonlinear channels to recuperate pictures. The Kalman straight channel [1] is commonly utilized. Non-straight channels like the all-encompassing Kalman channel (EKF) were additionally utilized. Bootstrap technique depends on both Bayesian state estimation and Monte Carlo strategy [1], and it is a vigorous technique since it isn't compelled by the linearity in direct model assumptions. In this paper, they propose a Bootstrap piece diffeomorphism channel (BKDF)[1] to decrease dot clamor in satellite pictures. They assessed the execution of the BKDF by contrasting it with the EKF concurring with the numeric qualities dependent on the picture flag to commotion proportion (ISNR) and pinnacle flag to clamor proportion (PSNR). Our outcomes proclaim that BKDF has more effectiveness than the EKF in the satellite picture rebuilding.
ISSN 2348-1218 (print)
International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
Author Work Result
Bassel Marhaba et al [1] They use Bootstrap kernel diffeomorphism filter (BKDF) to reduce speckle noise in satellite images[1]
D. Arbel et al [2] Landsat TM imagery is presented by implementing a Kalman filter as an atmospheric filter for satellite images restoration[2]
Mohammed Ismail et al [3]
Muhammad Sajid et al [4]
applying statistical methods to obtain a quantitative estimation of satellite images[3]
Recursive Least Square (RLS) adaptive algorithm is used for image restoration from highly noise corrupted images [4]
PSNR for 2 iteration and for Netherlands image is 28.08 and for Russia boreal forests is 25.38
PSNR obtain is 28.06 with two level iteration
PSNR obtain is 23.74 with two level iteration
With forgetting factor, λ = 0.98; filter coefficients = 2; regularization factor, δ = 0.001 and No. of iterations = 10 They obtain maximum PSNR of 63.01
In the previous decades, numerous methodologies for rebuilding of satellite pictures have been proposed, because of the significance of the satellite pictures and the huge requirements for it in a few fields, for instance: planet wellbeing, changing terrains and water bodies [1]. Picture reclamation is a significant field in the picture preparing area, which is utilized to reestablish the corrupted or twisted picture substance [2, 3]. The reason for picture rebuilding procedures is to expel commotion from the boisterous pictures while keeping up the vital information unharmed [4]. The perfect decision on the reclamation strategy is extremely basic so as to get the best rebuilding outcomes. Satellite pictures when caught and transmitted in a remote station are generally debased because of loud station impacts [5]. Picture debasement for the most part happens because of the channel clamor and irregular environmental disturbance [6, 7]. Accordingly, the channel substance are either constricted or enhanced amid transmission. In remote station, diverse clamor designs, for example, added substance white Gaussian commotion, motivation commotion and dot commotion can exist and mutilates the satellite pictures [2, 8]. Many sifting methods, for example, Kalman channel and its computationally proficient renditions, to be specific the diminished update Kalman channel (RUKF) [14] and the decreased request display Kalman channel (ROMKF) [12] and the expand Kalman channel (EKF) [16], have been observed to be helpful in reestablishing pictures. Near future a remarkable blend of ERLD and KDF with improved inspecting proficiency and execution for satellite picture reclamation will be developed to overcome the problems of available systems. The KDF summons piece diffeomorphism to frame a consistent gauge of the back thickness work. The upside of the portion diffeomorphism estimator (KDE) [11] is the concealment of the fringe combination troublesome.
Versatile channel are utilizing for the rebuilding of pictures that are very undermined by background noise salt and pepper commotion. In these channels at first the boisterous pixel is recognized and afterward it is supplanted by an appropriate esteem. Here the quantity of emphasess consequently increments until it get its reasonable middle an incentive to supplant the uproarious pixel. Calculation with a mix of RLS and Kalman versatile channel can be creating. In this administrative work we had the capacity to adequately numerically model of accessible plan of Extended Kernel diffeomorphism Filter for decrease the background noise non linier framework. There are applications like quick time fluctuating stations in numerous military, for example, guided rockets and even in satellite dispatch vehicles or business applications like 4G information correspondence. For picture rebuilding we required quick versatile non-direct channel which can adjust obscure framework as quickly as time permits, our proposed plan have extremely quick uniting rate which permits the exceptionally quick adaption of obscure channel. The work capacities essentially in the time area and this enable us to execute the plan of ref increment SNR.
This research review paper work is been developed as partial fulfilment of degree of Masters of Engineering from Jabalpur Engineering college, this paper methodology will be implemented with adequate tools and results with define parameters will be compared near future. I like to thanks my Professors of JEC, Jabalpur for giving me their valuable time and support.
ISSN 2348-1218 (print) International Journal of Interdisciplinary Research and Innovations ISSN 2348-1226 (online) Vol. 8, Issue 1, pp: (84-91), Month: January - March 2020, Available at: www.researchpublish.com
[1] Bassel Marhaba, Mourad Zribi, The bootstrap Kernel-Diffeomorphism Filter for Satellite Image Restoration, 978-15386-4615-1/18/2018 IEEE
[2] D. Arbel, E. Cohen, M. Citroen, D.G. Blumberg, and N.S. Kopeika, Landsat TM Satellite Image Restoration Using Kalman Filters, photogrammetric engineering and remote sensing January 2016
[3] Mohammed Ismail Abd-Almajied, picture reclamation of multispectral satellite pictures, Ministry of Higher Education and Scientific Research University of Baghdad, December, 2006
[4] Muhammad Sajid, Dr. Khurram Khurshid, Satellite Image Restoration Using RLS Adaptive Filter and Enhancement by Image Processing Techniques, 978-1-4673-8240-3/15/2015 IEEE
[5] ESA. "Radar picture of the Netherlands. Web: http://www.esa.int/spaceinimages/Images/2014/04/Radar_ image_of_the_Netherlands, April. 25, 2014.
[6] ESA. "Russian rapidly spreading fires. Web: http://www.esa.int/spaceinimages/Images/2017/05/Russian_wildfires, May. 26, 2017.
[7] M. J. M. Parmar, "Execution Evaluation and Comparison of Modified Denoising Method and Local Adaptive Wavelet Image Denoising Method," International Conference on IntelligentSystems and Signal Processing (ISSP), pp. 101-105, 2013.
[8] N. S. Sandeep Kaur, "Picture Denoising Techniques: A Review," International Journal of Innovative Research in Computer and Communication Engineering, vol. 2, pp. 4578-4583, 10 June 2014.
[9] J. P. Hema Jagadish, "Approach for Denoising Remotely Sensed Images Using DWT Based Homomorphic Filtering Techniques," International Journal of Emerging Trends and Technology in Computer Science (IJETTCS), vol. 3, pp. 90-96, 2014.
[10] D. V. K. C. Mythili, "Productive Technique for Color Image Noise Reduction," The Research Bulletin of Jordan ACM - ISWSA, vol. II, pp. 41-44, 2011.
[11] S. G. K. Apeksha Jain, Mohammed Ahmed, "Survey on Denoising strategies for AWGN flag presented in a stationary picture," Global Journal of Engineering Science Invention, vol. 3, pp. 01-10, 2014.
[12] D. V. R. Ganesan P "Division and Denoising of Noisy Satellite Images dependent on Modified Fuzzy C Means Clustering and Discrete Wavelet Transform for Information Retrieval," International Journal of Engineering and Technology (IJET), vol. 5, pp. 3858-3869, 2013.