23 minute read
Tabla 1. Características principales de RADAR

from 105339

28
Un RADAR consta fundamentalmente de un transmisor, un receptor, una antena, un sistema de almacenamiento de datos y uno de procesamiento. La antena alternadamente transmite y recibe pulsos de microondas de longitudes de onda definidas comprendidas en el rango de 1 cm a 1m y polarizadas en un plano vertical u horizontal. Esta tecnología ha estado en constante evolución procurando mejorar la medición de distancias y las velocidades para obtener información útil de objeto lejanos, es así como aparece la tecnología Radar SAR (Synthetic Aperture Radar) (IDEAM y CNM, 2017).
Advertisement
Las imágenes de radar están compuestas por pixeles, cada uno de los cuales representa el eco proveniente de un área sobre la tierra: zonas oscuras en la imagen representan bajo retorno de energía hacia el radar, zonas brillantes corresponden a alto retorno, este retorno está condicionado por una serie de factores que influyen en la intensidad de la imagen, o más concretamente, en la magnitud de coeficiente de retrodispersión; algunos de estos factores son dependientes de los parámetros del sistema, otros dependientes de los parámetros del área de interés y finalmente otros resultantes de las interacciones entre los anteriores (De Mata, 2019; IDEAM y CNM, 2017). En cuanto a parámetros del sistema se encuentran, la longitud de onda, la polarización y el ángulo de incidencia; longitud de onda, depende del tipo de banda con que opere el sensor, los sensores habituales de captación emiten en longitudes de onda que oscilan entre 2.4 y 30 cm. La Tabla 1 muestra la relación de los diferentes tipos de banda y su aplicabilidad.
Tabla 1. Características principales de RADAR Tomada de De Mata (2019)
BANDA LONGITUD DE FRECUENCIA APLICACIÓN
ONDA (CM)
(GHZ)
X 2.4 – 3.8 12.5 – 8 Civil, militar, meteorología Estudio del océano, agricultura, cambios en C 3.8 – 7.5 8 – 4 la superficie terrestre S 7.5 – 15 4 – 2 Meteorología L 15 – 30 2 – 1 Agricultura, humedad del suelo, forestal
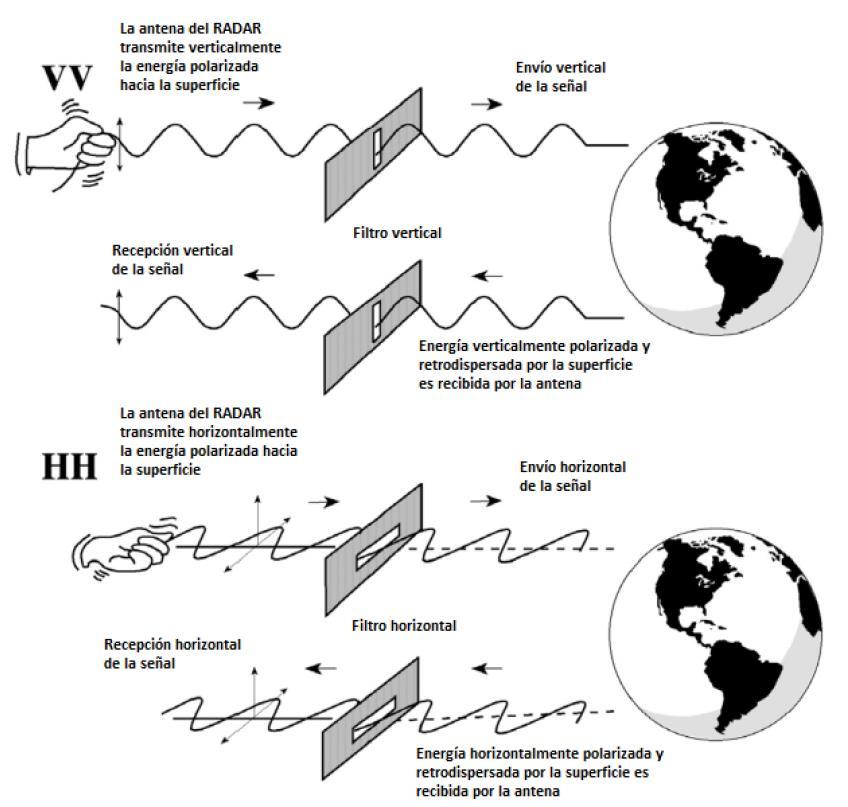
Por otro lado, la polarización está definida como la dirección de propagación de la onda perpendicular a la dirección del campo, los radares pueden transmitir y recibir señales en
29
polarización horizontal (H) o polarización vertical (V) (Figura 3). Los sensores Sentinel-1, por ejemplo, pueden transmitir y recibir señales tanto horizontal como verticalmente (De Mata, 2019).
Figura 3. Polarización Vertical (VV) y Horizontal (HH) Tomada de Podest (2017)
El ultimo parámetro del sistema que incide en la calidad de la imagen es el ángulo de incidencia (Figura 4), el cual está formado por el haz de luz del radar y una línea perpendicular a la superficie del terreno (IDEAM y CNM, 2017), es dependiente de la altura a la que se encuentre el sensor y de la geometría del área a captar, de ahí que influya en la intensidad del pixel y en la interpretación por cambios relativos a la luminosidad (Chapman et al., 2015).

Figura 4. Angulo de incidencia Left: ESA, Right: Ulaby et al. (1981a) (citado en Podest, 2017) 30
Los factores dependientes ligados a las condiciones del área de estudio, están determinados por: la constante dieléctrica, el grado de aspereza y ubicación de los objetos; la constante dieléctrica es una propiedad de los materiales que indica la reflectividad y conductividad, por ejemplo, los objetos en la tierra en estado seco tienen valores que oscilan entre 2 y 10, mientras que el agua puede llegar hasta 80; todos estos factores inciden en la señal reflejada, ya que la señal de radar es sensible a la estructura de la superficie, una superficie aparecerá áspera o lisa en relación a la escala de las variaciones de la superficie a la longitud de onda (Figura 5); estas interacciones de la señal de radar se pueden resumir en cuatro mecanismos de retrodispersión (Podest, 2017).

Figura 5. Mecanismos de retrodispersión Tomada de Podest (2017)
El mecanismo de doble rebote representa quizá una problemática al momento de determinar vegetación densa inundada, de acuerdo con Carreño y De Mata (2019), la presencia de vegetación riparia masiva y el crecimiento vertical de vegetación genera una dispersión de
31
doble rebote o una dispersión de volumen, lo que implica mayores limitaciones de captación de ciertas áreas inundadas sobre todo utilizando sensores con longitudes de onda corta.
2.2 MARCO METODOLÓGICO
Las necesidades por mitigar los impactos producidos por las inundaciones han dejado teorías y metodologías que permiten evaluar no solo los daños ocasionados post evento, sino preverlos con anterioridad para contrarrestar los efectos. En esta investigación se usará la modelación hidráulica empleando el software HEC-RAS, usando como insumo de entrada caudales de pronóstico del modelo SPT y un DEM; también se hará uso de la teledetección mediante la tecnología Radar SAR para recrear áreas inundadas.
2.2.1 Model Streamflow Prediction Tools (SPT)
SPT es un modelo hidrológico a escala global que busca realizar pronósticos de caudal en todos los ríos del mundo a alta resolución. El Modelo tiene dos componentes de pronóstico; uno histórico basado en ERA Interim (base histórica) y uno de pronóstico; el primero permite realizar simulaciones deterministas basado en el resultado de un re-análisis atmosférico global producido por ECMWF con datos desde 1980 hasta diciembre de 2014 (35 años) para todo el mundo. El segundo está basado en un conjunto de modelos hidrológicos probabilísticos que generan 51 pronósticos de escorrentía diferentes para los principales ríos del mundo en una red global (J. L. Sánchez, comunicación personal, 3 de marzo de 2020).
SPTestá basado en el modelo europeo GloFAS (Figura 6), un modelo que utiliza como datos de entrada las predicciones meteorológicas de 51 miembros del ECMWF, condiciones hidrometeorologícas iniciales, datos de topografía, propiedades del suelo, capas de ríos, etc, para luego procesarlos en dos modelos HTESSEL y Lisflood. HTESSEL simula todos los procesos de la superficie (precipitación, evapotranspiración, deshielo, infiltración en el suelo, etc) para convertir a escorrentía, finalmente se transita la escorrentía mediante el modelo Lisflood generando pronósticos de caudal en los ríos para 30 días a una resolución de 0.1 grados (10*10 km) (Souffront et al., 2019).

Figura 6. Cadena operativa de GloFAS Tomada de ECMWF (2016) 32
Las mejoras de SPT están dadas por la forma como se genera la reducción de escala, para lo cual usaron la caja de herramientas RAPID de ESRI (Environmental Systems Research Institute) y enrutaron la escorrentía utilizando el modelo RAPID, un modelo numérico que se basa en el método Muskingum, RAPID logró crear con éxito una forma de adaptar eficientemente el método Muskingum a cualquier red fluvial, lo que permitió generar previsiones de flujo de 15 días de alta resolución espacial (Snow, 2015).
Adicional a las mejoras del modelo realizadas por miembros de la universidad Brigham Young, un equipo de la misma universidad diseñó una aplicación web usando la plataforma Tethys, la cual permite acceder de forma libre a los pronósticos, haciendo clic en el drenaje de interés, automáticamente una ventana emergente muestra el hidrograma (Figura 7) que incluye interacciones comunes como acercar o alejar y la descarga de datos en formato CSV. El hidrograma incluye los períodos de retorno de 2, 10 y 20 años para proporcionar contexto de cuánta agua es demasiado para un alcance específico. Los 51 conjuntos se muestran utilizando estadísticas que incluyen la media, mínima, máx. y la desviación estándar. Una tabla de superación porcentual también muestra la probabilidad de un valor de flujo específico que supera un período de retorno basado en la predicción en cada conjunto individual (Souffrontt al., 2019).
33

Figura 7. Hidrograma SPT
2.2.2 El modelo HEC-RAS
HEC-RAS (Hydrological Engineering Center - River Analysis System) es un programa de modelización hidráulica desarrollado por el Hydrologic Engineering Center del US Army Corps of Engineers, es de uso libre, gratuito, de operación amigable y con soporte continuo de actualización, hechos que lo han posicionado a nivel mundial. HEC-RAS permite simular los flujos de agua en canales artificiales o cauces naturales, es ideal para realizar estudios de inundación, ya que ayuda a determinar el nivel de agua en diferentes puntos, así como las velocidades, entre otros parámetros (Parra, 2016).
La nueva versión (HEC-RAS v-5) tiene soporte para modelación bidimensional (2D) basado en la resolución de las ecuaciones de Saint Venant y de Onda Difusa para simular la inundación de la llanura de inundación, determinar la elevación de la superficie del agua y la distribución de la velocidad de las inundaciones (Ezzine et al., 2020). Además permite realizar análisis de flujo constante unidimensional, cálculos de flujo inestable unidimensional y bidimensional, cálculos de transporte de sedimentos y modelado de la calidad del agua (Brunner y CEIWR-HEC, 2016).
34
El portal academia ingnova5 destaca las principales características de HEC-RAS 5.0 (Academia IngNova, s. f.):
• Resuelve las ecuaciones de Saint Venant y Onda Difusa para dos dimensiones. • Modeliza mediante el método de los Volúmenes finitos implícitos. • Incorpora un algoritmo para resolver el acoplamiento de modelos 1D y 2D. • Permite modelizar mallas estructuradas y no estructuradas. • Mejora en los tiempos de cálculo debido al aprovechamiento de varios procesadores en ordenadores de 32 y 64 bits. • La modelización es más precisa en los cauces y en las planicies de inundación. • El interfaz de visualización de RAS Mapper permite la visualización detallada de los resultados y el movimiento.
2.2.2.1. Modelación hidráulica usando HEC-RAS
En apartados anteriores se mostró que los modelos matemáticos de simulación numérica han logrado un aporte valioso en el desarrollo de programas de simulación hidráulica, actualmente HEC-RAS es en uno de los programas más usados en el mundo para realizar mapas de inundación usando modelación hidrodinámica 1D y/o 2D. Citando estudios, Mosquera-Machado y Ahmad (2007) realizaron evaluación del peligro de inundación del río Atrato en Colombia usando modelación hidráulica con HEC-RAS
combinado con otras técnicas. En su estudio lograron estimar la profundidad máxima de agua alcanzada por el río y la extensión de la inundación. Por su parte en Bolivia, Moya et al. (2016) usaron la nueva versión de HEC-RAS para aplicar simulación numérica 2D en el análisis de inundación en la Amazonia boliviana, encontrando incluso un mejor desempeño en la inundación simulada que la encontrada en la imagen satelital del evento. En Túnez, Ezzine et al. (2020) realizaron mapeo de inundaciones en la cuenca Medjerda usando modelado hidráulico e imágenes Sentinel-1, encontrando que la simulación muestra buenos resultados cuando se comparó con la extensión de las inundaciones observadas por la imagen Sentinel-1. Mihu-Pintilie et al. (2019) usaron datos LiDAR de alta densidad y modelado
5 https://academia.ingnova.es/
35
hidráulico 2D para mejorar los mapas de peligros de inundaciones urbanas Esta combinación demostró ser un método eficiente para mejorar la distribución espacial de las inundaciones. Finalmente el consorcio DGP - CONCEP (2015) utilizó modelación bidimensional con HEC-RAS para los estudios de navegabilidad del río Putumayo. Estas investigaciones demuestran la utilidad de HEC-RAS en la modelación hidráulica.
El modelo HEC-RAS es capaz de modelar perfiles de superficies de agua de regímenes de flujo mixto, subcrítico y supercrítico. Para lo cual se requiere de una topografía detallada del cauce, con la cual es posible estimar de forma confiable los perfiles de flujo que circulan por el cauce. El modelo hidráulico requiere adicionalmente de unas condiciones de borde y de unas condiciones iniciales, ya que se trata de un esquema de solución por diferencias finitas (Brunner y CEIWR-HEC, 2016).
Con HEC-RAS 5 se pueden realizar modelaciones hidrodinámicas 1D, completamente 2D o un híbrido 1D2D. Los modelos 1D se componen de una serie de secciones transversales que describen la topografía del río y la llanura aluvial, si bien los modelos 1D funcionan bien en el cauce principal, el modelado 2D ha demostrado estimar mejor los flujos en llanuras aluviales topográficamente complejas, donde el flujo se considera en gran medida bidimensional (Cea y Bladé, 2008). Los modelos 2D consisten por lo general en una malla (cuadrícula computacional 2D) que representa el terreno en forma de celdas; a diferencia de 1D, los modelos 2D necesitan datos topográficos continuos, pero gracias al desarrollo tecnológico los datos topográficos de alta resolución han aumentado significativamente en los últimos años, favoreciendo el desarrollo de los modelos hidráulicos 2D (Betsholtz y Nordlöf, 2017). Los modelos hídricos 1D2D corresponden entonces a una combinación de los dos modelos, considerando 1D para el canal principal y 2D para las llanuras de inundación.
2.2.2.2. Modelización unidimensional (1D)
La modelación unidimensional (1D) ha sido y es la más utilizada, en esta sección se presentan los conceptos básicos del programa HEC-RAS para realizar modelación 1D. La modelación 1D de flujo no permanente se resuelve mediante las ecuaciones de continuidad y momento utilizando un esquema de solución de diferencias finitas semi-implícito. Un
36
modelo 1D HEC-RAS consta de datos geométricos, que describen las propiedades geométricas del área de estudio (geometría del canal), el flujo (Caudal) y/o datos de escenario que conforman las condiciones de contorno del modelo (Betsholtz y Nordlöf, 2017).
La geometría del canal puede constar de uno o varios tramos de río, que están conectados en uniones. Los datos de geometría necesarios para describir el sistema son la conectividad del tramo del río, los datos de geometría de la sección transversal y los datos que describen las estructuras hidráulicas del sistema. Las secciones transversales consisten en datos de
elevación de la estación que describen el perfil del terreno a lo largo de un trayecto perpendicular a la dirección del flujo. Las secciones transversales se pueden dividir en secciones del canal principal y de orilla con diferentes propiedades de rugosidad. Las propiedades hidráulicas del sistema dependen en gran medida de las secciones transversales, y estos son elementos clave en las simulaciones hidráulicas (Betsholtz y Nordlöf, 2017; Brunner, 2016). La geometría mínima que se necesita crear contiene entonces: las secciones transversales (XS Cut Lines), el canal por donde circula el río (Stream Centerline), el límite del cauce del río (Bank lines) y el límite de inundación (Flow Path Centerline) (Figura 8).
En consideración a las condiciones de contorno, estas dependen del régimen de flujo, si la simulación es de estado estable o dependiente del tiempo, se requieren condiciones de frontera en uno o ambos extremos de un tramo. Cuando se realizan cálculos de flujo inestable, las condiciones de contorno deben especificarse en ambos extremos de un tramo. La condición de frontera aguas arriba puede consistir en un hidrograma de flujo, un hidrograma de etapa o un hidrograma combinado de etapa y flujo. La condición de límite aguas abajo puede consistir en una etapa o un hidrograma de flujo, una curva de clasificación o como una suposición de profundidad normal. Si se supone una profundidad normal, se utiliza la ecuación de Manning para calcular la profundidad del agua. Además de las condiciones de contorno necesarias para realizar los cálculos, los hidrogramas de flujo se pueden ingresar lateralmente a lo largo de un tramo. Las entradas laterales se pueden agregar como un hidrograma de flujo que ingresa en una sola sección transversal, o como un hidrograma que se distribuye uniformemente en varias secciones transversales (Brunner, 2016).

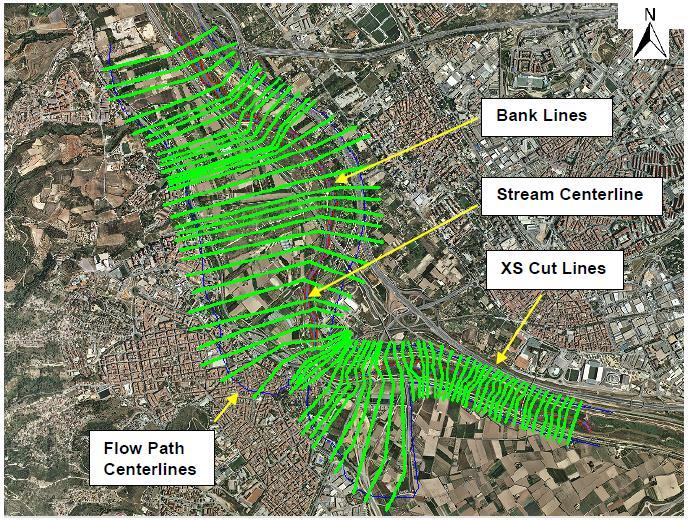
Figura 8. Geometría para modelación 1D Tomado de Parra (2016) 37
Finalmente, una vez creada la geometría e introducidas las condiciones de contorno, se procede a realizar la simulación para régimen no permanente, en el cual se debe especificar el tiempo de simulación, el motor de cálculo resuelve las ecuaciones de continuidad y momento utilizando una aproximación linealizada en diferencias finitas (Brunner, 2016).
2.2.2.3. Modelización bidimensional (2D)
Algunos autores indican que los modelos hidráulicos 2D son la tecnología de punta para la modelación de inundaciones (Timbe Castro y Willems, 2011); Por su parte, Moya Quiroga et al. (2016) lo consideran como una gran herramienta para simular y analizar inundaciones, sobre todo cuando no hay conocimiento de las características de la inundación.
La modelación bidimensional requiere al igual que la 1D, escoger el tipo flujo que se quiere analizar (permanente o no permanente), la geometría del canal, las condiciones de contorno y datos de rugosidad6. Una de las grandes diferencias,es que este tipo de simulación requiere
6 El coeficiente de rugosidad de Manning es un índice el cual determina la resistencia de un flujo en un canal.
38
un DEM para construir el terreno del área de investigación, ya que en dos dimensiones el río ya no se discretiza como una línea con una serie de secciones transversales, sino como una malla formada por una serie de celdas poligonales que representan la topografía del cauce y llanuras de inundación, el desarrollo de la malla es necesaria para introducir los datos de elevación y la cota de cada punto del terreno, la malla puede ser regular o irregular, estructurada o no estructurada; la mayor flexibilidad para una buena representación de la geometría y contornos se suele conseguir con una malla irregular (Bladé et al., 2014). Las celdas computacionales de una determinada malla pueden ser triángulos, cuadrados, rectángulos o polígonos de hasta 8 lados como máximo.
Las condiciones de contorno externas se presentan igualmente que en 1D (hidrograma de flujo, hidrograma de etapa, curva de clasificación y profundidad normal), adicionalmente la precipitación también puede ser una condición de límite interno, aunque se debe ingresar como precipitación efectiva donde se eliminan los efectos de la evaporación e infiltración, dado que estas actualmente no pueden modelarse en HEC-RAS (Betsholtz y Nordlöf, 2017). Por último, se corre la simulación como flujo no permanente, se escogen adicionalmente los análisis de salida, entre los cuales está el preprocesador de geometría, el simulador de flujo inestable, el post procesador y el Mapeo de la planicie de inundación, se establece la fecha de inicio y final, se establece los intervalos de computación, el intervalo de salida de hidrograma y el intervalo de salida detallado (Brunner, 2016).
2.2.3 Mapeo de inundaciones usando radar de apertura sintética
Los avances tecnológicos en los satélites de observación terrestre y la liberación de imágenes satelitales como Sentinel-1 han permitido el acercamiento de estas tecnologías en muchos campos de investigación relacionados con la detección y análisis de la cobertura terrestre, entre otros, mapeos de inundaciones (Nandalal et al., 2010). Según Priya et al. (2018), en la actualidad las investigaciones sobre inundaciones son importantes debido a los asentamientos humanos descontrolados y al desarrollo en las llanuras aluviales, en ese orden de ideas, Brivio et al. (2002) destacan los sistemas de radar como una herramienta principal para la evaluación en tiempo real de áreas inundadas, debido a su capacidad exclusiva de penetración de nubes, aspecto que se restringe con los datos ópticos dado las malas condiciones climáticas que se presentan durante y después de las inundaciones. En particular
39
los sistemas de Radar SAR se han convertido en la herramienta preferida para el mapeo de inundaciones, gracias a que la reflexión especular genera un retorno homogéneo bajo la señal de radar, lo que permite realizar segmentación de cuerpos de agua abiertos de una manera práctica, principalmente en lugares con baja densidad de vegetación y follaje escaso (Grimaldi et al., 2020; Lorenzo y Davila-Hernandez, 2018). Según Henderson y Lewis (2008) y Hess et al. (1990) para lograr mejores resultados en el mapeo de inundaciones sobre vegetación densa se requiere mayor profundidad de penetración de la señal SAR, por lo que recomiendan longitudes de onda más largas como las encontradas en la banda L.
Las imágenes de Radar SAR crudas presentan distorsiones radiométricas y geométricas que requieren corrección, estas distorsiones se deben a oscilaciones aleatorias de la señal devuelta al sensor debido a la interacción de la onda emitida con las superficies rugosas del terreno; los siguientes pasos de pre-procesamiento para la producción de mapas de inundación han sido considerados en algunas investigaciones: calibración radiométrica, ortorectificación de los datos, corrección radiométrica del terreno, filtrado de moteado (Chapman et al., 2015; Grimaldi et al., 2020; Priya et al., 2018).
Una vez realizado el pre-procesamiento de las imágenes se puede determinar las áreas de inundación empleando metodologías como clasificación supervisada y no supervisada automática, combinación RGB con imágenes anteriores y posteriores al evento o la técnica de los umbrales de detección o calibración (Carreño y De Mata, 2019). De acuerdo con las metodologías propuestas por EO College (2017) y Priya et al. (2018), la combinación RGB y la clasificación supervisada, implican procedimientos como:
• Generación de Subset: Es una técnica que permite delimitar y centrarse en el área de estudio, generando subconjuntos de las imágenes originales, lo que permite optimizar el tiempo del pre-procesamiento (EO College, 2017).
• Calibración Radiométrica: La calibración radiométrica rectifica los errores que se producen debido al azimut del sol, la elevación y las condiciones atmosféricas (Priya et al., 2018). Es un cálculo que consiste en convertir los valores o Niveles Digitales (DN) a coeficientes de retrodispersión (Song et al., 2007), en este proceso se obtiene para
40
cada celda el valor de intensidad de retrodispersión del radar y se generan nuevas bandas para las dos polarizaciones VH (transmisión vertical, recepción horizontal) y VV (transmisión vertical, recepción vertical), siendo la banda resultante σ0 (sigma) la que aporta una mejor separación entre las zonas terrestres de aquellas con presencia de agua (Bioresita et al., 2018; Tavus et al., 2018)
• Reducción de Ruido Speckle: “El speckle es un ‘ruido’ granular que existe inherentemente y degrada la calidad de las imágenes de SAR”, lo cual hace presentar un efecto de sal y pimienta en las imágenes (Podest, 2017). Es necesario la corrección de dicho ruido para realizar análisis de manera óptima, para lo cual Lee en 1981 propone la aplicación de un filtro con el fin de, reducir ruidos radiométricos basándose en la aplicación de medidas estadísticas (Ordoñez Castro, 2019).
• Corrección geométrica de terreno: La corrección geométrica tiene como finalidad localizar la imagen en la Tierra (geocodificación) y corregir distorsiones del terreno (Grimaldi et al., 2020). • Metodología Composición RGB: Este método se basa en encontrar las diferencias que existen entre las imágenes pre y post evento; para ello se crea una imagen compuesta de múltiples bandas entre estas dos imágenespreprocesadas (stack),luego se realizan combinaciones de bandas en cada uno de los colores primarios RGB (Red – Green – Blue); el resultado es una imagen multitemporal que indica el cambio en los valores de retrodispersión en el tiempo (Amitrano et al., 2019; EO College, 2017;
Tavus et al., 2018)
• Clasificación supervisada: Son técnicas de clasificación que se realizan para identificar un grupo homogéneo de píxeles asignando los conjuntos de datos de entrenamiento. En la clasificación supervisada, la información de una imagen SAR preprocesada se extrae en función de la característica de los píxeles en dos etapas (entrenamiento y clasificación de píxeles), cada píxel se clasifica bajo una característica particular en la etapa de clasificación dada. Dentro de estas técnicas se destacan: Random forest, G.KNN classifier, H.KD-Tree KNN classifier, Maximum Likelihood classifier y Minimum distance to mean classifier (Priya et al., 2018).
2.2.4 Análisis e interpretación de mapas
41
La cartografía ha sido empleada por el hombre de forma trascendental en la vida cotidiana y científica (Carrascal, 2007). Según la International Cartographic Association (ICA, 2003), la cartografía es una disciplina relacionada con la concepción, producción, diseminación y estudio de mapas7 . Teniendo en cuenta los aspectos anteriores, los mapas se convierten entonces en medios que permiten ver la realidad de lo que tiene o se presenta en un territorio.Según Carrascal (2007), los mapas se consideran herramientas potenciales para el trabajo científico, ya que ayudan a determinar las propiedades geométricas de los objetos y sus relaciones especiales con cierto grado de exactitud. De acuerdo con Salitchev (1990), el método cartográfico de investigación utiliza diferentes opciones del uso de mapas: análisis directo de mapas independientes, análisis comparativo de mapas de diferentes temáticas para un solo territorio, análisis comparativo de mapas de diferentes épocas para el mismo territorio, estudio comparativo de Mapas-Análogos, análisis relacionado con la transformación de la representación cartográfica, desintegración de la representación cartográfica en los componentes. El mismo autor indica que para el estudio de los fenómenos representados en los mapas hay cuatro tipos de análisis: visual, cartométrico, gráfico y matemático El análisis visual es el método más usado, este se caracteriza por tener en cuenta aspectos cualitativos, el resultado del análisis visual puede ser una descripción de los fenómenos estudiados; el análisis cartométrico está relacionado con mediciones y cálculos de las características cuantitativas; por su parte el análisis gráfico consiste en la investigación de fenómenos por medio de gráficos, como, modelos simbólicos, perfiles, diagramas, bloques; finalmente el análisis matemático se usa en los estudios de fenómenos, los cuales se puede representar en los mapas como un conjunto homogéneo de valores que cambian en el espacio.
7 Un mapa es una representación simbolizada de la realidad geográfica, y está diseñado para usarse cuando las relaciones espaciales son de importancia primordial.
3. METODOLOGÍA
42
La metodología empleada en esta investigación se detalla en el flujograma metodológico (Figura 9), en él se destacan tres procesos fundamentales para el desarrollo de los objetivos propuestos del capítulo 1. Inicialmente se realizó la selección del área de estudio teniendo en cuenta los eventos de inundación, posteriormente se plantearon dos procesos fundamentales. En el primero se realizó modelación hidráulica para mapear la extensión del riesgo hidráulico, este proceso determinó lo que pudo haber ocurrido en aquel momento. Un segundo proceso señaló mediante teledetección las áreas inundadas reales. Finalmente se contrastaron los hallazgos obtenidos mediante los dos procesos anteriores, permitiendo comparar lo modelado con la representación de la realidad.

Figura 9. Flujograma metodológico
Este flujograma está fundamentado en el marco teórico y metodológico y conforma una estrategia ágil y eficiente que permitió cumplir con los objetivos propuestos.
3.1 ÁREA DE ESTUDIO
43
El área de estudio corresponde a un tramo de 67 km del río Putumayo en el municipio de Puerto Asís Colombia. Inicia en la vereda Agua Negra, pasa por el caso urbano del municipio y termina en la vereda Los Camios (Figura 10). Para efectos de esta investigación se delimitan las márgenes del río de acuerdo con las áreas susceptibles a inundación (generalizada) determinadas por IDEAM (2010).


Figura 10. Ubicación del área de estudio
El municipio de Puerto Asís está ubicado al sur de Colombia en el departamento de Putumayo y forma parte de la región amazónica. El casco urbano del municipio se localiza aproximadamente a los 00°29'36" de latitud norte y 76°30'15" de longitud oeste. De acuerdo con el Instituto Geográfico Agustín Codazzi (IGAC, 2016), Puerto Asís tiene un área de 2,610 km² y limita al Norte con Puerto Caicedo y Puerto Guzmán (Putumayo), al Este con
44
Puerto Leguízamo (Putumayo), al Sur con la República del Ecuador y al Oeste con San Miguel (La Dorada), Valle del Guamuez (La Hormiga) y Orito (Putumayo). Las cifras indican que la población es de 64,867 habitantes, de los cuales 25,966 se encuentran en zona rural (DCD y DANE, 2018). El municipio presenta un clima cálido, la humedad relativa promedio anual es de 85%, la temperatura promedio de 24.9 °C y precipitación anual de 3,850 mm (Climate-Data.org, s. f.). Topográficamente la totalidad de sus territorios son planos o ligeramente ondulados, según el DEM remuestreado de ALOS PALSAR, el cauce principal se caracteriza por tener una pendiente suave de 0.045 (Figura 11), una morfología serpenteante y un ancho que varía entre 100 y 400 metros.


Figura 11. Perfil topográfico del río
3.2 PROCESO METODOLÓGICO
3.2.1 Selección de evento de inundación
El municipio de Puerto Asís ha sufrido inundaciones provocadas por el río Putumayo de manera recurrente en los últimos 20 años como se detalló en el capítulo 1, sin embargo, la selección del evento de inundación para esta investigación se debió ajustar a la disponibilidad de los datos de pronóstico del modelo SPT, los cuales están desde 2014. Conforme a lo anterior, se acudió a explorar noticias en la web sobre inundaciones durante los últimos seis años en Puerto Asís que involucraran al Río Putumayo como drenaje
