

СОДЕРЖАНИЕ ВЫПУСКА РОБОТОТЕХНИКА И ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА Центральный научно исследовательский и опытно конструкторский институт робототехники и технической кибернетики (Санкт Петербург) Том: 9 Номер: 3 Год: 2021 Название статьи Стр. ОБЩИЕ ВОПРОСЫ ПЕРСПЕКТИВЫ СОЗДАНИЯ И РАЗВИТИЯ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ В ИНТЕРЕСАХ МВД РОССИИ Дьяченко Д В ., Беседин Е В ., Антуфьева С В ., Роженцов М А 165-171 ПРЕДЛОЖЕНИЯ ПО ПОРЯДКУ КЛАССИФИКАЦИИ ЭКЗОСКЕЛЕТОВ ВОЕННОГО НАЗНАЧЕНИЯ Антохин Е .А., Письменная Е .В ., Щукин А.Н., Воронин Л.Л.
172-179 ПРОБЛЕМЫ ТЕСТИРОВАНИЯ РОБОТОТЕХНИЧЕСКИХ СИСТЕМ ДЛЯ ПЕРЕМЕЩЕНИЯ ПО КОСМИЧЕСКИМ ОБЪЕКТАМ Ананьев П.П., Плотникова А.В ., Тимофеев А.С., Мещеряков Р.В ., Беляков К О 180-185 ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ ОСОБЕННОСТИ ПОСТРОЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ S-ОБРАЗНОЙ КРИВОЙ РАЗГОНА/ТОРМОЖЕНИЯ ПРИ КУСОЧНО ЛИНЕЙНОЙ ИНТЕРПОЛЯЦИИ ПОВЕРХНОСТЕЙ СЛОЖНОЙ ФОРМЫ Зеленский А А., Абдуллин Т Х ., Алепко А В 186-195 СТРУКТУРА И СХЕМОТЕХНИЧЕСКОЕ РЕШЕНИЕ СИСТЕМЫ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭНЕРГИИ ДЛЯ ПРИМЕНЕНИЯ
В МОБИЛЬНЫХ РТК Крестовников К Д., Быков А Н., Ерашов А А 196-206 УПРАВЛЕНИЕ СПОСОБ ИЕРАРХИЧЕСКОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ ТРАНСПОРТНОЙ СИСТЕМОЙ ПРИ УПРАВЛЕНИИ ДВИЖЕНИЕМ КОЛОННЫ Гречушкин И В ., Прутчиков И О., Репин А В 207-213 КАРТОГРАФИРОВАНИЕ ЛИНЕЙНЫХ ПРИЗНАКОВ ДОРОГИ С ОБРАТНОЙ МОДЕЛЬЮ НАБЛЮДЕНИЯ ДЕТЕКТОРА Шипитько О С., Кабаков А Е 214-224 РАЗРАБОТКИ ВИРТУАЛЬНОЕ ПРОТОТИПИРОВАНИЕ СИСТЕМЫ ВИЗУАЛИЗАЦИИ СПУСКАЕМОГО ЛУННОГО МОДУЛЯ ДЛЯ УЛУЧШЕНИЯ ПРОСТРАНСТВЕННОЙ И СИТУАЦИОННОЙ ОСВЕДОМЛЕННОСТИ КОСМОНАВТОВ ПРИ ПОСАДКЕ НА ЛУННУЮ ПОВЕРХНОСТЬ Михайлюк М В ., Крючков Б И., Усов В М 225-233
ц иальная техн ссии ), г Моск показывает, сти силовых с обототехниче ов внутренних ю РТК в МВД развития пол назначения в
РОБОТ УДК DOI:: 1 C. 165 1 М 2 Анно Анали множе тельн и бес шения чаютс тотех среды Ключ Робот тельн 1 Gov e 2 Gov e Abstr The mineersofcapapolicsibleaaebthethd Key w ty,Robotres ТОТЕХНИКА и Т Общие 51007.520.31776/RTC-171 Перс Д . В 1 Федеральное инистерств а 2 Федеральное Министерс т отация из зарубежно ество возмож ности российс спилотные во я служебных ся основные хнических сис ы применения чевые слова тотехника, ро ная деятельно ProspeDm e rnment EnterpA e rnment Enterp ract analysis of fore areas of their e small-sized g bilities of the in e use of RTS i e prospects fo d, depending o words tics, robotic sy search and de ЕХНИЧЕСКАЯ К вопросы J.9301 пективы с . Дьяченк казенное учр е внутренних д казенное учр е ва внутренни го опыта исп ных направл кой полиции здушные суд задач. В ста задачи, подл тем Опреде и способа б бототехниче сть, НИОКР
КИБЕРНЕТИКА / ы
e course
m s of the Mini s e mnko@mvd.rusoftheMini s shows that the In the activitie been used, w rticle presents lems to be so S for various p Russia, law en в 2 ика и связь » ВД России ), связь » , Россия что существ структур В д еские компле х дел в ходе России, обоз лицейских ро зависимости
S t ion,
ц иальная
rests,
cts for creo itry V. Dia rise riseffairsScientificoftheRScientific ign npracticalexperiencapplround-basedternalaffairstheMinistryrdevelopmentheapplicastem,unmanvelopment.
создания и в и
n A ffairs
st ems and
2021; сов
ика и
the robotic
о 1 , Е . В . Б
s in the Antufievainte1
ва
), кото атье приводит лежащие реш еляется обла базирования еский комплек eation
nng.al Affairs
ждение « Науч ел Российско й г Кал у ждение « Науч х дел Российс к ( Материал п о
С, МВД Росси
9(3) ует
.
chenkoMinis1 M, a and
ии, правоохра
res ffairs of Russia obotic systems ment and the m hicle, UAV, Mi TECHNICAL CYB 5 я робототе МВД
х
Б еседин 1 , С ч но производс т й Федерации , К уга , Россия , d ч но производс ssociation Kaluga robotic tech activities of unma of Росси ic
nt and Teleco m R ussia, ddiach e nt and Teleco m w, Russia tems (RTS) s ent agencies. vehicles have tasks. The ar the main probl of use of RTS of R комплекс Роженцо в техн НПО « СТиС » М
s try of the Inte r s try of the Inte r ere are many p es of the Russ which expand s the current s olved, and con purposes is de nforcement ac ея ксы ре на бо от
пользования лений их пра и нашли прим да (БВС and d of the Productio Productio of in the use in syste bodies in the of Internal Af nt of police ro tion environm ned aerial veh
ни nalnal tatetheos-iansid-ter-tivi-

o ication
SofsystemsRussiavetlanaV.
th ce
ROBOTICS and 165
Br a n Association S e Russian Fed (Received 13 of
С . В . А нтуф ь венное объе д алужский фи л diachenko@m v венное объе д ( ФКУ НПО « С цию 13 апреля 2 ических компл применения в огабаритные ряют возможн состояние по матриваются п ования РТК р ные воздушны nt of robot rnalozhentcovBesedinAffairs1,S2 pecial Equipm e nch, Kaluga, R pecial Equipm e e ration, Mosco April 2021) hnological sys tate enforceme anned aerial v solving official a, discusses t s. The scope o method of basi inistry of Inter BERNETICS ехнических ии ь ева 1 , М . А . д инение « Спец л иал ( КФ ФКУ Н v d.ru д инение « Спец С ТиС » МВД Ро 2 021 года ) лексов (РТК) в деятельнос наземные ро ности органо о применению перспективы различного н ые суда, БВС
n ussian Federat and
развития нтересах М
т кой Федераци и о ступил в реда к робототехни актического п менение мало орые расшир тся текущее с шению, рассм асть использо кс, беспилотн sdevelopmetryofInterEvgenyV.aksimA.R n A
направления создания роб енного и спе падают с
ческий ком электромеха
еграды
ействий Явл оснащенным ранат и подъ а. На специа устанавлив обзорные ка » представл х650х550; , км/ч – 7; , м – 20 , м м СТ», г М
Робототехни шения эффе енной и спец я потерь личн Основные н т в области с мплексов вое новном, совп емени в МВД зцы РТК На льные измене го внедрения ую деятельно фере создания Согласно ро своей деятел ния науки и ти связи, а т лекоммуникац гут применят титеррористи мотре транс еспечения бе рядка [1].
Эффективно бствовать ши ранительной хнических ко пользовании ммуникацион
Issues ика – одно и направлений се большее п ьности, в том ние роботот является ва ективности п циальной тех ного
ирокомасшта деятельност омплексов и перспекти ных технолог ояние и
з перспектив , которое с рименение числе в сфе
хнологичных м находит вс ферах деятель безопасности Использован ТК) и систем
е МВД
я
п
General состава зар полиции полицейско оссийскому за льности обяз техники, ин соврем ционную ин при обес ической за портных сре езопасности решению перс набл
г ому
ехнических жным факто рименения ники (ВВСТ)
этих задач бное внедре и современ систем, осн вных инф ий
пективы раз юдается акт льную деяте расширяет утренних д аботе полиц РТК на коле а вертолетн ря 2021 года ри наземны рабей». робототехни овровский э ачен для те ативных м ических акто , проведения специальных
е время
кущее состо В последнее ние РТК в пр применение трудников о ибольшее пр земные мало спилотные во По состояни Росси », «КРМ «Металл ческий завод ловой подд едотвращени массовых блюдения,

ехнической и мероприятий, ов, пресече я разведки и х средств и 166 х ы в и о я е и х о а и и и и и и
лу





К
т
осуществ Обладает хор й формулы 6х (высо с различным М-06» осуще оператором «КРММ-06» , мм – 7 1,5; змеры груза, м авления, м – 2
ллист
абелю
ться
также
полноцен выми уст штангой поворотн снайперс микрофон Внешн рис. 1. Основ РТК «Мет габ ма ма дал дал дал Компл баритный предназна альных гр вой виде стью за с левать не движении Управ ционно по Внешн рис. 2. Основ РТК «КРМ габ ма ма габ дал вления отвле нным боевым тановками дл для креплен ой платфор кая винтовка н и громкогов ний вид РТК Рисунок 1 — Вне Figure 1 — Ap вные тактик таллист»: баритные раз асса, кг – 50; аксимальная с льность мета льность упра льность упра лекс робототе й «КРММ-06» ачен для пог рузов Оснащ еокамерой О счет колесной ебольшие пре и по местност вление «КРМ о радиоканал ний вид РТК вные тактик ММ-06»: баритные раз асса, кг – 27; асса груза, кг баритные раз льность упра екающих де м роботом, о ля запуска гр ия пистолета рме может а РТК имеет воритель К «Металлист ешний вид РТК « ppearance of RTC о технически змеры, мм – 7 скорость движ ания гранат, м авления по ка авления по ра ехнический м (ООО «ПОЛЮ рузки и транс щен грузовой

Многофункц екс
мобильный
ЮС
ведущихся в ототехничес циального на убежными Д менялись ед этапе произ ились тенде технологий Начаты исс й робототехн конодательс ана использо формационн енную инф фраструктур печении без щищенности дств, а так раждан и об
спортировки стрелой и м рошей прохо х6 и может пр отой до 75 мм м покрытием ествляется д м » представл ие характери 770х490х560; мм – 180х70х 200. ляется пуско ъемной альной ваться амеры, лен на истики 7; 00;–500. малога Москва) специ марше одимо реодо м) при истан лен на истики х70;
комплексов ором для по вооружения, ) и уменьше
звития РТК тивное внед ельность, т к возможности дел (ОВД). ции получили есном ходу и ого типа а на снабже ых РТК: «Ме
я
и
м
России ра ких систем и азначения, в До недавнего диничные об зошли значи енции массо в практиче следования в ники ству полиция овать дости ые системы, ормационно ру, которые зопасности и объектов, кже в целях щественного
Общ Вв тех дом сф и б (РТ вы вое ния бот ком осн вре раз тел вог ску сф в с же сет тел мо ант осм обе пор соб охр тех исп ком Тек рен их сот На наз бес ние тал пле нич сил пре ния наб щие вопросы / G ведение

Д России при современном ения и намет я цифровых ость
ч будет спо ние в право ных робото нованных на ормационно
о технически змеры
адиосвязи
жения
«Металлист» C Metallist ие характери 700
равоохраните значительно органов вн рименение в р огабаритные оздушные суд ию на 1 янва ии приняты т ММ-06» и «Ска циональный лист» (АО «К д») предназн держки опер ия террорист беспорядков применения
вных высоко каждым го в различных ере обороны



РОБОТ Уп компл назна и сбо ных м подви новле шения диста инфо Вн рис 3 Ос РТК « До ется Росси произ ные к видео том ч меще ТОТЕХНИКА и Т Рисунок 2 Figure 2 правляемый лекс «Скараб ачен для дос ора аудио и в местах и опас ижной платф енными на не я, тепловиз анционно опе рмации по ци нешний вид Рисунок 3 Figure 3 сновные так Скарабей»: габаритные масса, кг –время непр дальность у ополнительно возможност ии малогаба зводства ЦНИ комплексы м о и аудиораз числе в трудн ениях (подвал ЕХНИЧЕСКАЯ К — Внешний вид — Appearance of досмотровы ей» (АО «СЕ мотра днищ идеоинформ ных зонах О ормой (на к й видеокаме ором, микро ратором и о фровому рад РТК «Скара — Внешний вид Appearance of тико техниче размеры, мм 5,5; ерывной раб правления, м к имеющим ь принятия ритных РТК И РТК (г С огут применя ведки окруж одоступных ы, убежища, КИБЕРНЕТИКА / д РТК «КРММ-06» f RTC KRMM-06 ый робототе ЕТ-1», г Мос транспортны мации в труд Оснащен упр олесной баз ерами высоко офоном Упр беспечивает диоканалу абей» предст РТК «Скарабей» RTC Scarabeus еские харак м – 355х348х оты, ч – 2; м – 250. мся РТК рас на снабже «Юла-2» и Санкт Петерб яться для пр жающей обст местах и зак тоннели и д ROBOTICS and 167 ехнический ква) пред ых средств днодоступ равляемой е) с уста ого разре равляется передачу тавлен на ктеристики 155; ссматрива ение МВД и «Кадет» бург). Дан роведения тановки, в крытых по др.). Кроме TECHNICAL CYB 7 того, их мож тотранспорт ния взрывны Внешний лен на рис 4 Рисунок Figur Наиболе ческой подд вых меропр риторий и а го порядка (БВС). БВС т к не восп но являются задач в усл авиации не этом соврем собны выпо тельное пат указание и п В деятел для решени обеспечения риях и поте новении ч транспортны задержания стов, а такж вания местн В зависи и массы пол для доставк BERNETICS жно использо тных средств ых устройств й вид РТК «Ю 4 к 4 — Внешний ви re 4 — Appearance ее эффективн держки опера иятий, а такж кваторий при являются бе не относятс производят ч я эффективн ловиях, когда евозможно и менные воен лнять ведени трулирование поражение це льности поли я широкого с я безопаснос нциально опа чрезвычайных ых происшес преступнико же для видово ности имости от вре лезной нагру ки специальн овать при дос в для поиска Юла-2» и «Ка а) б) ид РТК: а) «Юла 2 e of RTC: а) Yula ными средств ативно розыс же для патру и обеспечени еспилотные в ся к классич человеческую ным средство а применение или нецелес нные компле ие воздушной е заданных елей [2]. иции БВС мо спектра задач сти на охран асных объек х ситуаций ствий, для п ов, обезврежи ой разведки и емени нахожд узки БВС мог ных грузов и 2021; смотре днищ и обезврежи адет» предст 2»; б) «Кадет» 2; б) Cadet вами для тех скных и поис улирования т ии обществен воздушные с ческим робот ю деятельнос ом при реше е пилотируем сообразно П ксы с БВС с й разведки, д районов, це гут применят ч Например, д няемых терри тах, при возн и дорож реследовани ивания терро и картографи дения в возд гут применят и средств не 9(3) ав ва ав ни ко ер но уда ам, ть, нии ой ри по ли ле ься ля то ик но я и ри ро ухе ься ле































Figure 5 —







менения робо равоохраните ных информа », шифр «Ска кационная тех «ИКТ «Циф
General
нятия на сна ное подразд пециальная аимодействии провело ряд ю РТК в право зовало работ хнических си х РТК и необи ия на снабже толетного тип н-41Т», «Орла ид БВС верт а) б)
модернизиров а базе автом З-43118, бес
на марше, раны периме шения других ОВД
из е войска,
вождения потре ными подра ы обществе значения «Г абжение МВ при реорга го состава б азделения с рые являлис бжение МВД еление Мин техника и с с заказыва научных и охранительн у по создан стем с испо таемых подв ние отобран а («DJI Mavic н К4»). олетного тип
Общ тал ки охр реш на пол сот ка, при нис ны наз экс гол ФК Ро раз по нос ски БВ рат тип Du лен щие вопросы / G
систем лет
Рисунок E5n
России БВС нистерства связь» МВД ающими под сследований ной деятель ию полицей ользованием водных аппа но несколько c 2 Enterprise па представ я х е о и С Д й м о e
2
ю полицейски
Результа робототе За по произошл тальных практичес тие воен зданы и ческие ко Федераци В 2019-20 нены исследов вать науч ники и оп шего nterprise Dual»; ) вертолетно ) «Грифон-41Т»; helicopter-type UA б) Grifon-41T; в) O созданию в Росси нные измене огических о ьности, обесп альной робо разрабатыва я Вооруженны сии, Росгвард интересах М сновополагаю аботы, позвол кий задел в о льнейшие пут ческое обосн иальной техн уникационны ального воор печение созд рового поли е путей прим (систем) в пр е перспективн х технологий» но коммуника ция», шифр ия НИР «Циф полиция» об льких AV: DJI Mavic Orlan-K4
, т к 016
по


бность в ис азделениями, нного поряд Гром». ВД России не анизации Ми ыли выведе специального ь основными
льней альных гий и оепри туаль шифр
ерации дамен аучно разви 3]. Со техни ийской оссии. выпол аучно рмиро ототех
МВД России льзовании Б трудниками Г отрядом спе В настоящее инят ни один стерства в 20 внутренние значения и а сплуатантами В целях при ловное научн КУ НПО «Сп ссии, во вза зделениями, применению сти и организ их робототех ВС, наземных тов
ВС оператив ГИБДД,
ототех ельной ацион анер»; хноло фровая
гр оповещения твенных объ ских задач, в щную
раз информа средств с пасов к н ного обл «Цифроп «И нических деятельн но комму «И гия «Циф полиция» В ход и «ИКТ « ность соз лицейски ящих из снабжени отечестве ном, возд ПРТС К ним наз го подвиж повышен — Внешний вид
б Appearance of a h prise Dual; б аты НИОКР п ехнических с оследние 10 ли существен и техноло ской деятель ной и специ продолжают омплексы для ии, МЧС Росс 020 годах в три ос вательские ра чно техническ ределить дал Научно технич звития специ ционно комм связи, специа нему, в обесп лика «Цифр ол»; Исследование комплексов ости на базе никационных Информацион фровая поли е выполнени «Цифровая здания неско х робототехн базовых пл ие в МВД Ро енных РТК в душном, водн относятся: земная ПРТС жного узла св ной проходим в
ециального на е время на сн н тип
Enterих
канер» озмож ых по состо ых на аемых назем облик
и
ванно мобиля пилот
Для приняти пов БВС верт al», «Грифон Внешний ви н на рис. 5.
Mavic 2
















ийской Феде ения в фунд областях на печивающих ототехники [3 аться робото ых Сил Росси дии и МВД Р МВД России в ющие на лившие сфор области робо ти развития: нование дал ники, специа ых технолог ружения и бо дания концеп ицейского»,
БВС
йствия, сопро звукового етров ведомс х специфиче и имеет насу охран БВС году подр , кото БВС
льного воздей
виации
специа нических сист атформ (шас оссии, и сери различном и ном), а также С в составе м вязи (ПУС) на мости КАМАЗ ого типа: а) «DJI M в) «Орлан К4»
168
а)
фропол», «Ск боснована во ализированны тем (ПРТС), сси), принят ийно выпуска исполнении (н е определен
«Н
Issues
рупп и техни населения, ъектов и для возложенных

РОБОТ ного в и наз плекс элект средс ТОТЕХНИКА и Т воздушного с земного робо са «Скарабе тронного про ств оптико эл ПРТС внутр ЕХНИЧЕСКАЯ К удна («DJI M тотехническо й», переносн тиводействи ектронного н енних вод в КИБЕРНЕТИКА / avic 2 Enterpr ого досмотро ного средств я БВС «Арг аблюдения; составе мод Рису Figure 6 — S Рисунок Figure 7 — Struct ROBOTICS and 169 rise Dual») ового ком ва радио гумент» и дифициро унок 6 — Структу Structure of the gr к 7 — Структура ture of the police TECHNICAL CYB 9 ванного кат душного су подводного Примеры 6 и 7. ура наземной ПРТ round police robot ПРТС внутренних robotic system fo BERNETICS тера «Альян удна («КС К аппарата («П ы структуры П ТС tic system х вод r inland waters нс-8,5М», бес Кондор М») и ПТОК СуперГ ПРТС предст 2021; спилотного в и необитаем ГНОМ»). тавлены на р 9(3) оз ого ис.



























































МВД России комплекса мер, вклю чающего проведение научных исследований и реа лизацию организационно технических мероприятий, позволит Министерству повысить эффективность применения робототехнических комплексов в повсе дневной деятельности сотрудников органов внутрен них дел и обеспечить внедрение современных ин формационно коммуникационных технологий Практическую реализацию мероприятий целесо образно проводить во взаимодействии с Минобороны России и Фондом перспективных исследований (ФПИ), на который возложены функции Националь ного центра развития технологий и базовых элемен тов робототехники Во взаимодействии с ФПИ, Минобороны России, МВД России и Росгвардией сформирована Комплексная целевая программа приоритетных работ по развитию ключевых техноло
ведомственных технических средств в единую си стему управления в короткий промежуток времени невозможна Для этого необходима поэтапная раз работка дополнительных устройств сопряжения и модернизация существующих сервисов ИСОД МВД России Еще одним проблемным вопросом является низ кий уровень автономности наземных РТК, применя емых в подразделениях ОВД («Металлист», «КРММ 06», «Скарабей»). Все указанные РТК управляются дистанционно оператором и не имеют собственной интеллектуальной системы управления и навигации, что снижает эффективность их применения в слож ных условиях окружающей обстановки и не обеспе чивает группового взаимодействия Это ограничива ет сферу применения роботов и их функциональные возможности В случае потери управляющего сигна ла робот станет неуправляемым и не сможет вер нуться в исходную позицию – начальную точку маршрута Кроме того, дистанционно управляемым РТК при сущи такие недостатки, как ограниченность радиуса действия, нарушение устойчивой работы в случае применения средств радиоэлектронного противодей ствия, а также демаскирование РТК и пункта управ ления вследствие интенсивного радиообмена между ними В целях расширения функциональных возможно стей перспективных РТК представляется целесооб разным предусмотреть повышение их автономности за счёт использования интеллектуальной системы управления и навигации, разрабатываемой в
Для интеграции разнородных технических средств в единое информационное пространство МВД России необходимо разработать унифициро ванные протоколы (модули) обмена информацией Кроме того, для осуществления мониторинга ме стоположения базовых платформ (автотранспортно го средства и катера) в центре управления (дежур ной части или мобильном пункте управления) нужно обеспечить их отображение в реальном масштабе времени на фоне единой электронной карты местно сти, входящей в состав ведомственной геоинформа ционной системы (ГИС). Как показывает опыт создания подобных ком плексов в Минобороны России (КРУС «Стрелец» и «Кунгас»), сопряжение разнородных РТК в составе единой системы управления (на основе унифициро ванных программных модулей) является сложной научно технической задачей Поэтому интеграция рамках целевой программы «Создание пер спективной военной робототехники на период до 2025 года с прогнозом до 2030 года» (КЦП «Роботи зация-2025»). Учитывая эти обстоятельства, в МВД России за планировано поэтапное создание ПРТС до 2030 го да На первом этапе (с 2021 по 2025 годы) необхо димо обеспечить управление ведомственными РТК под управлением оператора и получение начального опыта эксплуатации РТК, а на втором (с 2026 по 2030 годы) – повышение автономности и совершенство вание ПРТС Одновременно с проведением НИОКР в Мини стерстве проводится работа по разработке и актуа лизации нормативной правовой базы по применению РТК, в том числе БВС, внесению изменений в нормы положенности и ведомственный приказ, регламенти рующий порядок принятия на снабжение (в эксплуа тацию) специальной техники Заключение Выполнение
комплексной
Общие вопросы / General Issues 170 Опытный образец ПРТС внутренних вод в сен тябре 2020 года успешно прошел государственные испытания В настоящее время осуществляется кор ректировка конструкторской документации для пред ставления на рассмотрение государственной комис сии с целью присвоения литеры О1 и организации серийного производства Проблемные вопросы и задачи, подлежащие решению Помимо обоснования возможности создания пер спективных ПРТС и определения их облика, в ходе выполнения научно исследовательских и опытно конструкторских работ (НИОКР) обозначены про блемные вопросы, подлежащие решению В каждой создаваемой системе будут применять ся РТК и БВС, разработанные разными производи телями и имеющие собственные (уникальные) си стемы управления и навигации Поэтому необходимо обеспечить сопряжение протоколов информационно го взаимодействия отдельных компонентов устройств и их интеграцию в составе единой систе мы информационно аналитического обеспечения деятельности МВД России (ИСОД МВД России).
Svetlana V. Antufieva, Government Enterprise Scientific and Production Association Special Equipment and Telecoms of the Ministry of the Internal Affairs of the Russian Federation, Kaluga Branch, Head of Section, 5, ul. Generala Popova, Kaluga, 248033, Russia, tel.: +7(4842)79-24-29
1. Russian Federation, 2011. Federal'nyj zakon no.3-FZO Politsii [Federal Law no.3-FZ About Police]. Available at: <http://ivo.garant.ru/#/document/12182530/paragraph/209:0> [Accesed 05 April 2021].
Роженцов Максим Алексеевич, Федеральное казенное учреждение «Научно производственное объеди нение «Специальная техника и связь» Министерства внутренних дел Российской Федерации (ФКУ НПО «СТиС» МВД России), центра, 111024, г Москва, ул Пруд Ключики, д. 2, тел.: +7(495)673-31-91, mrozhentcov@mvd.ru
Информация
Information about the authors
Dmitry V. Diachenko, Government Enterprise Scientific and Production Association Special Equipment and Telecoms of the Ministry of the Internal Affairs of the Russian Federation, Kaluga Branch, Head of Branch, 5, ul. Generala Popova, Kaluga, 248033, Russia, tel.: +7(4842)79-24-29, ddiachenko@mvd.ru
References
2. Burenok, V.M., Ivlev, A.A. and Korchak, V.Ju., 2009. Razvitie Voennyh Tehnologij XXI Veka: Problemy, Planirovanie, Realizacija [Development of Military Technologies of the XXI Century: Problems, Planning, Implementation] Russia,Tver': OOO «KUPOL» Publ., p.624. (in Russian).
заместитель начальника
Evgeny V. Besedin, Government Enterprise Scientific and Production Association Special Equipment and Telecoms of the Ministry of the Internal Affairs of the Russian Federation, Kaluga Branch, Senior Research Scientist, 5, ul. Generala Popova, Kaluga, 248033, Russia, tel.: +7(4842)79-24-29
Maksim A. Rozhentcov, Government Enterprise Scientific and Production Association Special Equipment and Telecoms of the Ministry of the Internal Affairs of the Russian Federation, Deputy Head of the Center, 2, ul. Prud Kljuchiki, Moscow, 111024, Russia, tel.: +7(495)673-31-91, mrozhentcov@mvd.ru
3. Murakhovskii, V.I., 2019. Nazemnye voennye roboty [Ground military robots]. Arsenal Otechestva, 3(41), pp.5467. (in Russian). об авторах Дьяченко Дмитрий Викторович, Федеральное казенное учреждение «Научно производственное объединение «Специальная техника и связь» Министерства внутренних дел Российской Федерации, Калужский филиал (КФ ФКУ НПО «СТиС» МВД России), начальник филиала, 248033, г Калуга, ул Генерала Попова, д. 5, тел.: +7(4842)79-24-29, ddiachenko@mvd.ru Беседин Евгений Вячеславович, КФ ФКУ НПО «СТиС» МВД России, с.н.с, 248033, г. Калуга, ул. Генера ла Попова, д. 5, тел.: +7(4842)79-24-29 Антуфьева Светлана Владимировна, КФ ФКУ НПО «СТиС» МВД России, начальник сектора, 248033, г Калуга, ул Генерала Попова, д. 5, тел.: +7(4842)79-24-29
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 171 гий навигации и наведения, необходимых для созда ния робототехнических комплексов и систем нового поколения на 2015-2030 годы Успешная реализация мероприятий Программы позволит создавать отече ственные РТК, не уступающие иностранным анало гам, и обеспечить развитие информационно коммуникационных технологий, основанных на раз личных физических принципах Литература 1. Российская Федерация. Законы. О полиции: Федеральный закон № 3-ФЗ [Принят Государственной Ду мой 28 января 2011 года: Одобрен Советом Федерации: 2 февраля 2011 года] // Система «Гарант» [Офиц сайт]. – URL: http://ivo.garant.ru/#/document/12182530/paragraph/209:0 (дата обращения 05.04.2021). – Текст: электрон ный 2. Буренок В М Развитие военных технологий XXI века: проблемы, планирование, реализация / В М Буре нок, А А Ивлев, В Ю Корчак. – Тверь: Издательство ООО «КУПОЛ», 2009. – 624 с. – Текст: непосредственный 3. Мураховский В И Наземные военные роботы / В И Мураховский // Арсенал Отечества. – 2019. – № 3 (41) – С. 54-67 – Текст: непосредственный.
The article defines the role and place of exoskeletal structures for military purposes in the military equipment of military personnel, and provides a brief analysis of the functional tasks assigned to them. Based on the results of the analysis, a new formulation of the concept of «military exoskeletons» is proposed, and the order of their classification is recommended. Based on the practical experience of creating and using exoskeletons for military purposes, a general description of all the proposed classification groups and their features is given.
Evgeniy A. Antokhin , Elena V. Pis’mennaya, Alexander N. Schukin, Leonid L. Voronin Ministry of Defence of the Russian Fe deration, 46 Central Research Institute, Moscow, Russia, johncoin@mail.ru
Введение В настоящее время одним из основных направ лений дальнейшего совершенствования боевой эки пировки военнослужащих (БЭВ) является включение в ее состав антропоморфных экзоскелетных кон струкций (экзоскелетов) [1, 2]. Всесторонний анализ опыта применения различ ной боевой экипировки показывает, что на организм военнослужащих длительно воздействует комплекс негативных факторов, приводящих к перенапряже нию различных структур невро мышечного и опорно двигательного аппарата: мышц, сухожилий, связок, околосуставных мягких тканей, межпозвонковых дис ков, суставных поверхностей и т д Среди комплекса специфических факторов силовых нагрузок, обу славливающих повышенную тяжесть физической (мышечной) работы военнослужащих, следует выде лить: неравномерное распределение физической нагрузки на опорно двигательный аппарат; динамические и статические мышечные нагрузки, связанные с подъемом, перемещением и удержанием различного по массе груза; значительные усилия, прикладываемые к ор ганам управления военной техникой и ручным ин струментам (вооружению); необходимость выполнения частых и глубоких наклонов корпуса; длительное поддержание физиологически не рациональных (неудобных, фиксированных, вынуж
Key words
(Received 24 February 2021)
Общие вопросы / General Issues 172 УДК: 617.3:615.477 DOI: 10.31776/RTCJ.9302 C. 172-179 Предложения по порядку классификации экзоскелетов военного назначения Е . А . Антохин , Е . В . Письменная , А . Н . Щукин , Л . Л . Воронин Федеральное государственное бюджетное учреждение «46 Центральный научно исследовательский институт Министерства обороны Российской Федерации » ( ФГБУ 46 ЦНИИ МО РФ ), Москва , Российская Федерация , johncoin@mail.ru ( Материал поступил в редакцию 24 февраля 2021 года ) Аннотация В статье определены роль и место экзоскелетных конструкций военного назначения в составе боевой экипи ровки военнослужащих, проведен краткий анализ возлагаемых на них функциональных задач. По результа там анализа предложена новая формулировка понятия «экзоскелеты военного назначения», рекомендован порядок их классификации На основе практического опыта создания и применения экзоскелетов военного назначения дана общая характеристика всех предложенных классификационных групп и их признаков Ключевые слова Экзоскелет военного назначения, боевая экипировка военнослужащих, классификационные группы, активный экзоскелет штурмового типа, пассивный экзоскелет, взрывотехнический экзоскелет, такелажный экзоскелет, медицинский экзоскелет
Abstract
Suggestions for the order of military exoskeletons classification
Military exoskeleton, military combat equipment, classification groups, active assault-type exoskeleton, passive exoskeleton, explosive exoskeleton, rigging exoskeleton, medical exoskeleton.
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 173 денных) поз при выполнении боевых задач; многократно повторяющиеся движения рук различной амплитуды, например, погрузочно разгрузочные работы, усугубленные вращением кор пуса, приводящие к патологии нервно мышечного аппарата спины В этой связи, по мнению отечественных и ино странных военных экспертов, экзоскелетные кон струкции способны уменьшить силомоментное воз действие на опорно двигательный аппарат военно служащих при решении следующих функциональных задач: переноска грузов с размещением спереди или сзади; длительное удержание грузов с размещением спереди или сзади (в статическом или малоподвиж ном состоянии); подъем, перемещение и укладка грузов; маршевые нагрузки с экипировкой весом от 25 кг до 80 кг; работа с удержанием инструмента (вооруже ния) стоя, сидя, лежа; работа с удержанием инструмента (вооруже ния) с поднятыми руками (позиционирование грузов). Важным шагом на пути формирования единого понятийного аппарата в рассматриваемой области стало введение стандартизированного термина «эк зоскелет военного назначения». Согласно [3] под экзоскелетом военного назначе ния подразумевается разновидность роботизирован ного средства военного назначения, предназначен ного для увеличения силы мышц и/или расширения амплитуды движений оператора за счет внешнего каркаса и приводящих элементов Однако, по мнению авторов, предлагается рас смотреть следующую редакцию указанного понятия: «Экзоскелет военного назначения – индивидуальное антропоморфное носимое роботизированное сред ство военного назначения, предназначенное для увеличения силовых возможностей и/или снижения силомоментного воздействия на опорно двигательный аппарат военнослужащего». Вместе с тем, в существующей нормативно технической документации до настоящего времени не определен порядок классификации экзоскелетов военного назначения, их классификационные при знаки окончательно не сформированы В сложившихся условиях разработка предложе ний по порядку классификации экзоскелетов военно го назначения в рамках данной статьи представляет ся актуальной научно технической задачей Цель работы: на основе систематизации резуль татов ранее проводимых исследований и анализе существующего научно технического задела, со зданного отечественными и зарубежными специали стами в области разработки экзоскелетных конструк ций военного назначения, выработать предложения по порядку их классификации Предложения по порядку классификации экзоскелетов военного назначения Анализ работ [4-8], а также результаты проведен ных исследований перспектив дальнейшего развития БЭВ позволяют предложить следующий порядок классификации экзоскелетов военного назначения 1. По наличию в составе источника энергии и движителей: а) пассивные экзоскелеты; б) активные экзоскелеты 2. Активные экзоскелеты по типу основного источника энергии: а) экзоскелеты с двигателем внутреннего сгора ния; б) экзоскелеты на аккумуляторных батареях; в) экзоскелеты на топливных элементах; г) экзоскелеты с силовыми установками нетра диционного типа
4. Активные экзоскелеты по типу применяемых в их конструкции силовых приводов: а) экзоскелеты c гидравлическими приводами; б) экзоскелеты с электромеханическими приво дами; в) экзоскелеты с электропневматическими при водами; г) экзоскелеты с приводами на нетрадиционных принципах; д) экзоскелеты с комбинированными
3. Активные экзоскелеты по способу организации сети энергопитания: а) автономные по питанию экзоскелеты; б) неавтономные по питанию экзоскелеты
типами при водов 5. По целевому предназначению в составе БЭВ: а) штурмовой экзоскелет; б) такелажный экзоскелет; в) маршевый экзоскелет; г) взрывотехнический экзоскелет; д) медицинский экзоскелет 6. По анатомической локализации конструкции: а) экзоскелет верхних конечностей; б) экзоскелет нижних конечностей; в) экзоскелет костюм 7. По массе: а) сверхлегкие; б) легкие; в) средние; г) тяжелые
Общие вопросы / General Issues 174 8. По способу управления: а) экзоскелеты с программным управлением; б) экзоскелеты со встроенными органами управ ления; в) экзоскелеты с управлением на основе соб ственных естественных движений оператора; г) экзоскелеты с управлением на основе мышеч ной активности; д) экзоскелеты с управлением на основе нейронной активности 9. По эксплуатационным показателям: а) диапазон настраиваемых параметров экзоске лета под антропометрические показатели оператора; б) кинематические показатели; в) показатели скорости и быстродействия опера тора в экзоскелете; г) временные показатели обслуживания и ис пользования экзоскелета. Общая характеристика классификационных групп экзоскелетов военного назначения 1. По наличию в составе источника энергии и движителей: А Пассивный экзоскелет – экзоскелет, в котором в качестве источника энергии используется только мышечная сила оператора Принцип действия пассивных экзоскелетов осно ван на базовых законах механики: за счёт комплекс ного применения шарнирно рычажной конструкции, системы упоров, фиксирующих устройств и поддер живающих соединений он способен существенно разгрузить вес носимого оборудования, снизить утомляемость оператора при выполнении длитель ных, монотонных и тяжелых физических работ Достоинства: практически неограниченная авто номность применения (не зависят от внешних источ ников питания), относительно небольшая масса и стоимость, относительная простота конструкции и эксплуатации и, как следствие, высокая надежность Недостатки: длительность применения ограничи вается физическими возможностями и индивидуаль ной утомляемостью оператора, способен ограничи вать естественные движения Б Активный экзоскелет – экзоскелет, работа ко торого осуществляется с применением источника энергии, приводящего в действие элементы шарнир но рычажной конструкции, закрепляемой на теле оператора Конструктивно большая часть образцов экзоске летов активного типа представляет собой шарнирно рычажный комплекс с интегрированными в него си ловыми приводами Кроме того, в состав экзоскеле тов активного типа обычно входят встроенная сен сорная система и бортовая управляющая система Достоинства: значительное увеличение силовых возможностей и выносливости, расширение рабочей зоны оператора; повышенное удобство применения за счет поддержки естественных движений операто ра и программной подстройки режимов функциони рования в зависимости от выполняемой задачи; ав томатический контроль и диагностика работоспособ ности Недостатки: зависимость от бортовых источников питания (ограниченность и влияние климатических условий на время автономной работы), относитель ная сложность эксплуатации, массивность конструк ции, высокая стоимость 2. Активные экзоскелеты по типу основного источника энергии: А Экзоскелеты с двигателем внутреннего сгора ния, в которых механическая энергия двигателя внутреннего сгорания преобразуется в электриче скую с использованием генератора электрического тока Б Экзоскелеты на аккумуляторных батареях, в которых в качестве источника энергии применяется группа однотипных химических источников тока мно горазового применения, соединенных между собой электрически и конструктивно (литий полимерные, магний графеновые аккумуляторы). В Экзоскелеты на топливных элементах, в кото рых в качестве источника энергии применяются пор тативные реакторы, преобразующие химическую энергию топлива (например, от окисления водорода или алюминия) в электрическую (другим, наиболее перспективным направлением, является разработка атомных источников, принцип действия которых ос нован на использовании энергии естественного рас пада радиоактивных изотопов). Г Экзоскелеты с силовыми установками нетра диционного типа, в которых получение энергии осу ществляется с применением инновационных, ранее неиспользуемых подходов [9, 10]. 3. Активные экзоскелеты по способу организации сети энергопитания: А Автономные по питанию экзоскелеты, кон струкция которых предусматривает питание от бор товых источников энергии При этом одной из основ ных характеристик рассматриваемой классификаци онной группы является время автономной работы Б Неавтономные по питанию экзоскелеты, кон струкция которых предусматривает питание от лю бой внешней, в том числе и от промышленной, энер госети 4. Активные экзоскелеты по типу применяемых в их конструкции силовых приводов: А Экзоскелеты c гидравлическими приводами, в которых в качестве исполнительных устройств
6. По анатомической локализации конструкции: А Экзоскелет верхних конечностей предназначен для увеличения силовых возможностей и/или сниже ния нагрузки на руки оператора (на здоровые либо утратившие функции). Данные экзоскелеты могут применяться при об служивании артиллерийских систем и военной тех ники, проведении погрузочно разгрузочных и других работ, а также в медицинских целях в ходе реабили тации раненных военнослужащих Конструктивно экзоскелеты верхних конечностей могут быть выпол нены как в активном, так и в пассивном вариантах Б Экзоскелет нижних конечностей предназначен для увеличения силовых возможностей и/или сниже ния нагрузки на ноги оператора (на здоровые либо утратившие функции). Данные экзоскелеты позволя ют решать задачи по снижению утомляемости и по вышению
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 175 наиболее часто применяют гидравлические цилин дры, значительно реже – поворотные гидродвигате ли (гидроквадранты). Б Экзоскелеты с электромеханическими приво дами, в которых в качестве исполнительных устройств применяют электродвигатели (могут быть поворотными или линейными) в сочетании с редук торами В Экзоскелеты с электропневматическими при водами, в которых в качестве исполнительных устройств чаще всего применяют пневматические цилиндры, реже – поворотные пневмодвигатели Г Экзоскелеты с приводами на нетрадиционных принципах, в которых функционирование исполни тельных устройств основано на инновационных, ра нее не применяемых подходах К данной классифи кационной группе можно отнести, например, экзоске летные конструкции, функционирование исполни тельных устройств которых основано на применении «искусственных мышц», таких, например, как мышцы Джозефа МакКиббена (Joseph L. McKibben), а также создаваемых на основе высокомолекулярных и дру гих соединений Под термином «искусственная мыш ца» в рассматриваемой области разработчики пони мают исполнительное устройство из полимерных материалов, способных изменять свою форму, гео метрические размеры, физико механические харак теристики под влиянием внешнего воздействия [11]. Стоит также отметить, что по причине новизны рас сматриваемого вопроса, исполнительные устройства на основе электроактивных полимеров до настояще го времени не стандартизированы, научно обосно ванное базовое понятие «искусственная мышца» окончательно не сформировано Д Экзоскелеты с комбинированными типами при водов, в которых в качестве исполнительных устройств применяют силовые приводы двух и более различных типов 5. По целевому предназначению в составе БЭВ: А Штурмовой экзоскелет — экзоскелет военного назначения, представляющий собой элемент БЭВ и предназначенный для увеличения уровня защищен ности, наращивания носимого боекомплекта, расши рения номенклатуры применяемого вооружения и средств обеспечения, повышения силовых возмож ностей, выносливости военнослужащих при ведении боевых действий в условиях пересеченной, горно лесистой и урбанизированной местности Б Такелажный экзоскелет — экзоскелет военного назначения, предназначенный для повышения сило вых возможностей и выносливости, снижения нагруз ки на опорно двигательный аппарат военнослужащих при выполнении различных работ, связанных с подъемом, удержанием и перемещением тяжестей В Маршевый экзоскелет — экзоскелет военного назначения, представляющий собой элемент БЭВ и предназначенный для снижения нагрузки на опорно двигательный аппарат, повышения выносливости и силовых возможностей военнослужащих при совер шении длительных передвижений в пешем порядке с полной боевой выкладкой в условиях пересеченной, горно лесистой и урбанизированной местности Г Взрывотехнический экзоскелет — экзоскелет военного назначения, представляющий собой эле мент БЭВ и предназначенный для повышения уров ня защиты, снижения нагрузки на опорно двигательный аппарат, повышения силовых возмож ностей и выносливости военнослужащих инженер ных специальностей при проведении работ по раз минированию и обезвреживанию взрывоопасных предметов Д Медицинский экзоскелет — экзоскелет, пред назначенный для реабилитации раненых и восста новления функций опорно двигательного аппарата военнослужащих при стационарном лечении в меди цинских учреждениях
работоспособности оператора при пере носке грузов. В медицинских целях экзоскелеты ниж них конечностей могут также применяться для реа билитации раненных (пораженных) военнослужащих, предоставляя им возможность самостоятельно пе редвигаться на собственных ногах Кроме того, в настоящее время канадскими ин женерами разработан опытный образец экзоскелета нижних конечностей PowerWalk, способный осу ществлять генерацию энергии за счет движения ног при ходьбе (до 10-12 Вт/час по утверждению произ водителя). На сегодняшний день также известны как активные, так и пассивные образцы экзоскелетов нижних конечностей В Экзоскелет костюм предназначен для увели чения силовых возможностей не только верхних и
В Средние (масса от 15 до 30 кг).
Г Тяжелые (масса свыше 30 кг).
Выводы 1.
БЭВ военнослужащих является включение в ее состав антропоморфных экзоскелетных конструкций (эк зоскелетов) различного целевого предназначения По мнению зарубежных и отечественных военных специалистов, это позволит увеличить уровень за щиты, расширить номенклатуру применяемого во оружения и носимый боезапас, существенно повы сить выносливость и физические возможности «сол дата будущего» при выполнении широкого спектра как боевых, так и обеспечивающих задач 2. Окончательное формирование понятийного аппарата (единых научно обоснованных терминов и определений), охватывающего предметную область создания и применения экзоскелетов военного назначения, полагается целесообразным выполнить в рамках цикла научно исследовательских работ с привлечением научных, образовательных и произ
со встроенными органами управ ления Экзоскелеты, в которых управляющие сигналы формируются при воздействии оператора на кнопки, джойстики, сенсоры и др В Экзоскелеты с управлением на основе соб ственных естественных движений оператора Указанные экзоскелеты управляются за счет мы шечных усилий оператора, прикладываемых к эле ментам исполнительных устройств Г Экзоскелеты с управлением на основе мышеч ной активности В указанных экзоскелетах управление осуществ ляется за счет преобразования биотоков, обуслов ленных изменением электрического потенциала биологических мембран мышечных волокон и аксо нов оператора, входящих в состав смешанных пери ферических нервов и структур нервно мышечного синапса При этом измерение электрического потен циала выполняется посредством электродов, за крепляемых или инвазивно вживляемых в тело опе ратора [13, 14]. Д Экзоскелеты с управлением на основе нейрон ной активности В указанных экзоскелетах управление осуществ ляется за счет регистрации электроэнцефалограммы и преобразования сигналов электрической активно сти мозга [15, 16]. 9. По эксплуатационным показателям: А Диапазон настраиваемых параметров экзоске лета под антропометрические показатели оператора Показатель характеризует возможность примене ния экзоскелета операторами
Общие вопросы / General Issues 176 нижних конечностей, но и повышения выносливости всего тела оператора [12]. Зачастую образцы данных экзоскелетов имеют активное исполнение, однако известен ряд изделий, имеющих пассивную компо новку Экзоскелет костюм наиболее предпочтителен для включения в состав перспективной БЭВ, так как такая конструкция способна обеспечить наибольшую защиту оператора от средств поражения противника и неблагоприятных воздействий условий боевой об становки 7. По массе: А Сверхлегкие (масса до 5 кг). Данная группа может быть представлена исключи тельно пассивными образцами экзоскелетов, в кон струкции которых отсутствуют бортовые источники питания, применяются легкие и прочные материалы Б Легкие (масса от 5 до 15 кг). В указанную классификационную группу могут входить как пассивные, так и активные образцы эк зоскелетов (в основном с питанием от внешней сети либо с незначительным временем автономной рабо ты от бортового источника энергии).
Рассматриваемую классификационную группу со ставляют в основном активные экзоскелеты костюмы, способные, в том числе, выступить в каче стве каркасной основы при формировании перспек тивной БЭВ
8. По способу управления: А Экзоскелеты с программным управлением Указанные экзоскелеты управляются оператором в соответствии с установленной программной сово купностью движений Б Экзоскелеты разных ростовых групп Б Кинематические показатели Показатели характеризуют абсолютные значения амплитуд движения (объем движения) в суставах оператора в экзоскелете В Показатели скорости и быстродействия опера тора в экзоскелете Временные показатели, характеризующие воз можность и эффективность применения экзоскелета при выполнении различных задач Г Временные показатели обслуживания и ис пользования экзоскелета Временные показатели, характеризующие опера тивность выполнения технического обслуживания и ремонтных работ, а также скорость подготовки эк зоскелета к использованию, одевания и снятия В настоящее время одним из приоритетных направлений дальнейшего совершенствования
Группа может быть представлена как пассивны ми, так и активными образцами экзоскелетов (с рас ширенными функциональными возможностями и увеличенным временем автономной работы).
13. Modar Hassan. Wearable Gait Measurement System with an Instrumented Cane for Exoskeleton Control / Hassan Modar, Kadone Hideki, Kenji Suzuki and Sankai Yoshiyuki // Sensors (Basel). – 2014 Jan; 14(1): 1705–1722. DOI: 10.3390/s140101705 (accessed: 30.06.2021). – Text: electronic.
9. Patent US 2013/0056981 A1. Methods and apparatus for control of biomechanical energy harvesting: Appl. No.: 1 12/059,440: Pub. Date: 07.03.2013 / Mullins Clive Edward, Daniel Loren Hepler; Assignee: Bionic Power Inc. – Text: unmediated.10.
8. Месропян А В Экзоскелеты Классификация и перспективы развития / А В Месропян, А В Воробьева // Молодежный вестник УГАТУ. – 2020. – 2(23). С.76-83. – URL: http://journal.ugatu.ac.ru/index.php/mvu/article/view/ 3017/2637 (дата обращения: 30.06.2021). – Текст: электронный
Patent US 7851932 B2. Backpack based system for human electricity generation and use when off the electric grid: Appl. No.: 1 12/059,440: 31.03.2008: Pub. 14.12. 2010 / Lawrence Craig Rome, Heath Fred Hofmann, Guanghui Wang; Assignee Lightning Packs, LLC, Strafford, PA (US)). – Text: unmediated.
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 177 водственных организаций, заинтересованных мини стерств и ведомств 3. Следующим важным шагом на пути реализа ции единой технической политики в рассматривае мом направлении должна стать разработка и утвер ждение базового нормативно технического докумен та: «Система общих технических требований к видам вооружения и военной техники Экзоскелетные кон струкции военного назначения Общие технические требования». 4. Результаты данной работы носят предвари тельный, исследовательский характер Предложен ный порядок классификации экзоскелетов военного назначения в ходе выполнения дальнейших научных и экспериментальных исследований может потребовать дополнения классификационных групп и/или уточне ния отдельных классификационных признаков Литература 1. Статников А. А. Кибернетизация и использование экзоскелетов в медицинской и военной сфере / А. А. Статников // Современные исследования. – 2018. – № 1(05). – С.53-55. – Текст: непосредственный 2. Гараев А З Применение экзоскелетов в комплексе вооружения современных войск мира / А З Гараев, И А Тещаев // V Международная научно практическая конференция «Материально техническое обеспечение силовых структур государства»: сборник. – 2018. – С. 109–114. – Текст: непосредственный 3. ГОСТ РВ 0101-002-2018 Робототехнические комплексы военного назначения Термины и определения. –Дата введения 2018-10-01. – Москва : Стандартинформ, 2018. – Текст: непосредственный 4. Терминология и классификация экзоскелетов / А А Воробьев, Ф А Андрющенко, О А Засыпкина [и др.] // Вестник ВолгГМУ. – 2015. – № 3(55). – С. 71–78. – Текст: непосредственный 5. Спорные вопросы терминологии и классификации экзоскелетов (аналитический обзор, собственные дан ные, уточнения, предложения) / А А Воробьев, Ф А Андрющенко, О А Пономарева [и др.] // Волгоградский научно медицинский журнал. – 2015. – № 3. – С.14–20. – Текст: непосредственный 6. Новак К В Перспективы создания отечественных экзоскелетных комплексов военного назначения / К В Новак // Тематический сборник статей по вопросам проведения испытаний робототехнических комплексов воен ного и специального назначения, ГНИИЦ РТ МО РФ. – 2018. – С. 124–136. – Текст: непосредственный 7. Методический подход к сравнительной оценке активных экзоскелетных конструкций военного назначе ния / Е А Антохин, Л Л Воронин, О П Меньшиков, И А Кашин // V Военно научная конференция «Роботиза ция ВС РФ»: сборник. – Анапа: ФГАУ «Военный инновационный технополис «ЭРА», 2020. – С. 143–152. – Текст: непосредственный
14. Jinghui Caoa. Control strategies for effective robot assisted gait rehabilitation: The state of art and future prospects. Review / Jinghui Caoa, Sheng Quan Xieab, Raj Dasa, Guo L. Zhub // Medical Engineering & Physics. – 2014. –pp. 1556-1664. – DOI: 10.1016/j.medengphy.2014.08.005 (accessed: 11.08.2021). – Text: electronic.
11. Иванов В П Искусственные мышцы на A. Ossadtchi // Journal of Neural Engineering. – 2020. – v.17. – № 4. – pp. 1–14. – Text: unmediated.
набухающих полимерах как модель мышечного аппарата биоме ханических систем / В П Иванов, И Ю Дмитриев, Г К Ельяшевич // Российский журнал биомеханики. – Т. 21. –№ 4. – 2017. – С. 398–403. – Текст: непосредственный 12. Digital filters for low-latency quantification of brain rhythms in real-time / N. Smetanin, A. Belinskaya, M. Lebedev,
15. Decoding Movement From Electrocorticographic Activity: A Review / K. Volkova, M. Lebedev, A. Kaplan, A. Ossadtchi // Frontiers in Neuroinformatics. – 2019. – DOI: 10.3389/fninf.2019.00074 (accessed: 11.08.2021). –Text: electronic.16. Soft Exosuit for Hip Assistance / Alan Asbeck, Kai Schmidt, Conor James Walsh // Preprint submitted to Robotics and Autonomous Systems. November 3, 2014. – pp. 102-110. – DOI:10.1016/j.robot.2014.09.025 (accessed: 11.08.2021). – Text: electronic.
References
5. Vorobiev, A.A. et al., 2015. Spornye voprosy terminologii i klassifikatsii ekzoskeletov (analiticheskiy obzor, sobstvennye dannye, utochneniya, predlozheniya) [Controversial issues of terminology and classification of exoskeletons (analytical review, own data, clarifications, suggestions)]. Volgograd Journal of Medical Research, 3, pp.14-20. (in Russian).6.Novak, K.V., 2018. Perspektivy sozdaniya otechestvennykh ekzoskeletnykh kompleksov voennogo naznacheniya [Prospects for the creation of domestic exoskeleton complexes for military purposes]. In: Tematicheskiy sbornik statey po voprosam provedeniya ispytaniy robototekhnicheskikh kompleksov voennogo i spetsial'nogo naznacheniya [Thematic collection of articles on testing robotic systems for military and special purposes]. CSSRDI for Robotics of Ministry of Defence of Russian Federation, pp.124-136. (in Russian).
7. Antokhin, E.A. et al., 2020. Metodicheskiy podkhod k sravnitel'noy otsenke aktivnykh ekzoskeletnykh konstruktsiy voennogo naznacheniya [Methodical approach to the comparative assessment of active exoskeletal structures for military purposes]. In: V Voenno-nauchnaya konferentsiya «Robotizatsiya VS RF» [Proceedings of V Military Scientific Conference on Robotization of the RF Armed Forces], pp.143-152. (in Russian).
10. Assignee Lightning Packs, LLC, 2008. Backpack based system for human electricity generation and use when off the electric grid. US 7851932 B2.
9. Bionic Power Inc., 2013. Methods and apparatus for control of biomechanical energy harvesting US 2013/0056981 A1.
Информация об авторах Антохин Евгений Александрович, Федеральное государственное бюджетное учреждение «46 Цен тральный научно исследовательский институт Министерства обороны Российской Федерации» (ФГБУ 46 ЦНИИ МО РФ), н с., 129327, Москва, Чукотский проезд, д. 10, , тел.: +7(962)984-65-17, johncoin@mail.ru
8. Mesropyan, A.V. and Vorobieva, A.V., 2020. Exoskeletons. Classification and development prospects [Exoskeletons. Classification and development prospects]. Youth Bulletine of USATU, 2(23), pp.76-83. Available at: <http://journal.ugatu.ac.ru/index.php/mvu/article/view/3017/2637> [Accesed 30 June 2021].
1. Statnikov, A.A., 2018. Kibernetizatsiya i ispol'zovanie ekzoskeletov v meditsinskoy i voennoy sfere [Cybernetization and the use of exoskeletons in the medical and military sphere]. Sovremennye issledovaniya, 1(05), pp.53-55. (in Russian).2.Garaev, A.Z. and Teschaev, I.A., 2018. Primenenie ekzoskeletov v komplekse vooruzheniya sovremennykh voysk mira [The use of exoskeletons in weapons complex modern armies of the world]. In: V Mezhdunarodnaya nauchno-prakticheskaya konferentsiya «Material'no-tekhnicheskoe obespechenie silovykh struktur gosudarstva» [Proceedings of V International Scientific and Practical Conference on Material and Technical Support of the Power Structures of the State], pp. 109-114. (in Russian).
13. Modar Hassan et al., 2014. Wearable gait measurement system with an instrumented cane for exoskeleton control. Sensors (Basel), 14(1), pp.1705–1722. DOI: 10.3390/s140101705.
3. 2018. GOST RV 0101-002-2018. Robototekhnicheskie kompleksy voennogo naznacheniya. Terminy i opredeleniya [Russian National State Standard RV 0101-002-2018. Military robotic systems. Terms and Definitions]. (in Russian).4.Vorobiev, A.A. et al., 2015. Terminologiya I klasifikatsiya ekzoskeletov [Terminology and classification of exoskeletons]. Journal of VolgSMU, 3(55), pp.71-78. (in Russian).
14. Jinghui Caoa et al., 2014. Control strategies for effective robot assisted gait rehabilitation: The state of art and future prospects. Review. Medical Engineering & Physics, 36(12), pp.1556-1664. DOI: 10.1016/j.medengphy.2014.08.005.15.Volkova,K.,2019.Decoding movement from electrocorticographic activity: a review. Frontiers in Neuroinformatics. DOI: 10.3389/fninf.2019.00074.
16. Asbeck, A., Schmidt, K. and Walsh, C.J., 2014. Soft Exosuit for Hip Assistance. Robotics and Autonomous Systems, 73, pp. 102-110. DOI: 10.1016/j.robot.2014.09.025.
11. Ivanov, V.P., Dmitriev, I.Yu. and El’yashevich, G.K., 2017. Iskusstvennye myshtsy na nabukhayushchikh polimerakh kak model' myshechnogo apparata biomekhanicheskikh sistem [Artificial muscles on swelling polymers as a model of the muscular apparatus of biomechanical systems]. Rossiyskiy zhurnal biomekhaniki, 21 (4), pp.398-403. (in Russian).12.Smetanin, N. et al., 2020. Digital filters for low-latency quantification of brain rhythms in real-time. Journal of Neural Engineering, 17(4), pp.1–14.
Общие вопросы / General Issues 178
требование сыграло важ ную роль для внедрения экзоскелетов на производ ственных предприятиях, строительных площадках и в других сложных средах В условиях кризиса COVID-19 мировой рынок ро бототехнических экзоскелетов, оцениваемый в $647,1 млн в 2020 году, по прогнозам, достигнет раз мера в $2,1 млрд уже к 2026 году, при этом средне годовой темп роста (CAGR) составит 21,2%. Соглас но прогнозам, в здравоохранении, один из сегментов, анализируемых в отчете, будет расти с показателя ми CAGR 20,8% и к концу периода анализа достигнет $1,2 млрд После тщательного анализа последствий пандемии и вызванного ею экономического кризиса для бизнеса среднегодовой рост в промышленном сегменте составит
на последующий 7-
Воронин Леонид Леонидович ., 129327, Москва . 10, .: +7(926)648-99-79, leonid.voronin@mail.ru
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 179 Письменная Елена Валентиновна, к т н., доцент, ФГБУ 46 ЦНИИ МО РФ, с н с., 129327, Москва, Чукот ский проезд, д. 10, тел.: +7(910)402-73-21, epismen@yandex.ru, ORCID: 0000-0002-7833-1235 Щукин Александр Николаевич, к т н., ФГБУ 46 ЦНИИ МО РФ, начальник научно исследовательского от дела, 129327, Москва, Чукотский проезд, д. 10, тел.: +7(903)121-26-96, shchuka-sasa@mail.ru
европейских странах к 2026 году рынок экзоскелетов достигнет $305,6 млн Промышленный сегмент выигрывает от повыше ния осведомленности о различных преимуществах использования экзоскелетов В глобальном промыш ленном сегменте США, Канада, Япония, Китай и Ев ропа будут обеспечивать CAGR в 22%. Эти регио нальные рынки в совокупности оценивались в $167,4 млн в 2020 году, достигнут размера в $699,6 млн к концу 2026. Китай останется одним из самых быст рорастущих в этом кластере региональных рынков Рынок Азиатско Тихоокеанского региона, возглавля емый такими странами, как Австралия, Индия и Юж ная Корея, к 2026 году достигнет $70,2 млн (По материалам сайта Robogeek)
Global Industry Analysts Inc.: Роботизированные экзоскелетытраектория глобального рынка и аналитика
К 2026 году мировой рынок робототехнических эк достигнет 2,1 миллиарда долларов Рост мирового рынка обусловлен старением населения, технологическими инновациями и расширением их применения в военной отрасли и здравоохранении На фоне строгих мер социального дистанцирова ния и ограничений на поездки для сдерживания рас пространения коронавируса, сочетание нехватки ра бочих и экспоненциального роста сектора электрон ной коммерции создало высокий спрос на передовые инструменты для повышения производительности труда и обеспечении безопасности работников в различных отраслях Это 23,1% летний По прогнозу рынок робототехнических экзоскеле тов в США в 2021 году достигнет в $319,6 млн В настоящее время на страну приходится 43,07% миро вого рынка По прогнозам, Китай, вторая по величине экономика мира, к 2026 году достигнет размера рынка в $255,8 млн, что соответствует среднегодовым тем пам роста 25,4%. Среди других примечательных гео графических рынков – Япония и Канада с прогнозиру емым CAGR 16,9% и 19,2% соответственно В Европе рост прогнозируется в Германии, примерно на 21%. В остальных
, ФГБУ 46 ЦНИИ МО РФ, н с
, Чукотский проезд, д
тел
Leonid L. Voronin, Ministry of Defence of the Russian Federation, 46 Central Research Institute, Research Scientist, 10, Chukotsky proezd, Moscow, 129327, Russia, tel.: +7(926)648-99-79, leonid.voronin@mail.ru
Information about the authors
Elena V. Pis’mennaya, PhD in Technical Sciences, Associate Professor, Ministry of Defence of the Russian Federation, 46 Central Research Institute, Senior Research Scientist, 10, Chukotsky proezd, Moscow, 129327, Russia, tel.: +7(910)402-73-21, epismen@yandex.ru, ORCID: 0000-0002-7833-1235
Alexander N. Schukin, PhD in Technical Sciences, Ministry of Defence of the Russian Federation, 46 Central Research Institute, Head of Research and Development Department, 10, Chukotsky proezd, Moscow, 129327, Russia, tel.: +7(903)121-26-96, shchuka-sasa@mail.ru
зоскелетов
период
Информация
Evgeniy A. Antokhin, Ministry of Defence of the Russian Federation, 46 Central Research Institute, Research Scientist, 10, Chukotsky proezd, Moscow, 129327, Russia, tel.: +7(962)984-65-17, johncoin@mail.ru
(Received 28 July 2021)
Pavel P. Anan’ev 1 , Anna P. Plotnikova 1 , Alexandr S. Timofeev 2 , Roman V. Mes с heryakov 3 , Konstantin O. Belyakov 4
The article discusses the issues of providing full-scale testing of machines and spacecraft. The authors consider the surface of a cosmic body and propose the creation of an analogue of the regolith of the Moon and Mars. It is noted that it is necessary to observe not only the physicochemical and granulometric composition of the analogue, but also its electromagnetic charge, which will allow testing robotic systems more fully. Conclusions and description of the process of regolith creation and its properties are given. regolith, electromagnetic properties, physical modeling.
Key words Robotic system, space,
Введение Развитие космических робототехнических систем в последнее время сильно активизировалось Это свя зано, прежде всего, с потенциальной возможностью добычи полезных ископаемых на космических объек тах, в первую очередь, на спутнике Земли – Луне. [1-5] Развитие космической горной отрасли определя ется целесообразностью создания продукции непо средственно в космосе, с использованием космиче ского сырья В свою очередь, при возникновении по требности подобного рода продукции на искусствен ных и природных космических объектах будут суще ствовать два конкурирующих способа: 1. Доставка продукции, произведенной на Земле, где основные затраты будут определяться логистикой 2. Производство продукции непосредственно в космосе с использованием космического сырья, где основные затраты будут определяться массой тех нологических робототехнических систем на единицу массы производимой продукции
3 V.A. Trapeznikov Institute of Control Sciences of Russian Academy of Sciences, Moscow, Russia, mrv@ieee.org
Abstract
Problems of robotic systems testing for moving on space objects
Общие вопросы / General Issues 180 УДК: 007.52 DOI: 10.31776/RTCJ.9303 C. 180-185 Проблемы тестирования робототехнических систем для перемещения по космическим объектам П . П . Ананьев 1 , А . В . Плотникова 1 , А . С . Тимофеев 2 , Р . В . Мещеряков 3 , К . О . Беляков 4 1 Научно образовательный центр « Инновационные горные технологии ( ЦИГТ ), Москва , Российская Федерация 2 Институт проблем комплексного освоения недр им академика Н В Мельникова РАН ( ИПКОН РАН ), Москва , Российская Федерация 3 Институт проблем управления им В А Трапезникова РАН , Москва , Российская Федерация , mrv@ieee.org 4 Национальный исследовательский Томский государственный университет ( ТГУ ), г Томск , Российская Федерация ( Материал поступил в редакцию 28 июля 2021 года ) Аннотация В статье рассматриваются вопросы обеспечения натурного тестирования машин и аппаратов космического назначения Авторами рассматривается поверхность космического тела и предлагается создание аналога реголита Луны и Марса Отмечается, что необходимо соблюдение не только физико химического и грануло метрического состава аналога, но и его электромагнитного заряда, что позволит проводить тестирование ро бототехнических систем более полно Приводятся выводы и описание процесса создания реголита и его свойств Ключевые слова Робототехническая система, космос, реголит, электромагнитные свойства, физическое моделирование, напла нетная деятельность
1 Scientific and Educational Center «Innovative mining technologies», Moscow, Russia
4 Tomsk State University (TSU), Tomsk, Russia
2 Academician N.V. Melnikov Institute for the Problems of Complex Development of Subsoil of RAS, Moscow, Russia
Реголит В качестве выветриванияиз мельчайших частиц гор ных пород (до 1 мм), минералов (анортит, ильменит, оливин, пироксен) и стекла. На разных участках тол щина его слоя может колебаться от 3 до 15 м Грунт, покрывающий Луну, серого цвета, а взятый из морских впадин — коричневого или черного Лунные моря насыщены базальтовыми породами Начало изучения реголита относится к 1960-м го дам, когда межпланетная советская станция «Луна 13» смогла впервые определить плотность и твер дость лунного грунта Спустя три года экипаж амери канского космического корабля «Аполлон-11» доста вил образцы реголита на Землю В ходе той же мис сии один из членов экипажа, Нил Армстронг, стал первым человеком, ступившим на Луну, а его коллега Базз Олдрин оставил на реголите след своего ботин ка В 1970-м году советская автоматическая станция «Луна-16» транспортировала на Землю часть грунта со дна Моря Изобилия Исследование образцов ве лось под управлением выдающегося отечественного геохимика Александра Виноградова Он смог выде лить в реголите частицы с острыми краями, как у не давно раздробленных
пород, и с более округлыми Таблица 1 — Физико-механические свойства реголита Луны, Марса и земных аналогов Table 1 — Physical and mechanical properties of the regolith of the Moon, Mars and terrestrial analogues Характеристики Луна Земные аналоги Марс Земные аналоги Реголит Пирокластические образования Толбачинского Дола Реголит Реголит мёрзлый Пирокластические образования вулкана Безымянный Размер зерен, мм 0,06-2 0,125-1 0,1-5 - 0,125-2 Плотность, г/см 3 0,9-1,2 0,87-1,2 1,0-1,6 - 1,38-1,88 Пористость, % 40-50 41-53 35-65 - 33-67 Теплопроводность, Вт/м·К° 1,2-1,7 0,13-0,23 0,1-0,122,2-3,2 –Теплоемкость, Дж/(м 3·К°) 0,188 0,87 1,05 0,8-1,1 0,85 Угол внутреннего трения, градусов 10-20 20-38 18-41 - 25-45 Сцепление, МПа 0,013-0,03 0-0,03 0-0,00050,004 0-0,064 Удельное сопротивление, Ом·м 3,2 105-108 - 103-106 105-108 Диэлектрическая проницаемость, Ф/м 3,36 - 2,2-2,8 3,25-4 2,2-2,8 Мощность реголита < 20 м - < 2 км - -
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 181 Создание робототехнических систем с подобным функционалом может столкнуться с проблемой наземных испытаний из за отсутствия земных анало гов горных пород, обладающих такими же специфи ческими свойствами как породы на природных кос мических объектах Однако при тестировании различных систем, тех ники и аппаратуры требуется проверка не только частных задач, типа геометрической или динамиче ской проходимости для наземного (вернее налунно го) робота, но и работа в условиях повышенного электромагнитного поля Первой задачей, которая должна быть решена – это создание аналога лунного грунта – реголита Лунный реголит обладает рядом специфических свойств, таких как его налипание на поверхность ра бочих органов робототехнических систем Это обу словлено воздействием на грунты космической ра диации различной природы Солнечный ультрафио лет выбивает из поверхности электроны, и грунты приобретают положительный заряд При этом ночью заряд меняется на отрицательный из за наличия свободных электронов в лунном ветре [6]. В связи с вышесказанным при создании космиче ских робототехнических систем необходимо учиты вать аномальные адгезионные свойства реголита, что вносит свои ограничения в использование кос мических систем на её поверхности [7]. Потенциал поверхности составляет примерно 100 В, при нахож дении Луны в магнитном хвосте Земли потенциал увеличивается и составляет от 200 В до 1000 В
основы для тестирования необходимо использовать аналог поверхности космических объек тов, в частности, реголит Реголит (от греч. regos — «одеяло» и litos — «камень») — остаточный пылеоб разный грунт на поверхности Луны, образовавшийся в результате
Максимальный зафиксированный потенциал ночной стороны лунной поверхности составил 4000 В [7].
Химический состав лунного грунта приведен в табл. 2, по данным [6-8,9-14].
CaO 10,8 10,3 13,3 11,6 10,0 4,5 0,7 2,2
В лунном реголите обнаружены редкоземельные металлы, в том числе – в самородной форме Кроме того, в реголите содержатся уникальные металличе ские соединения, нехарактерные большое количество аналогов из разных стран и из различных базовых материалов, поэтому может быть трудно выбрать наиболее подходящий аналог реголита для конкретной исследовательской задачи [8]. Еще одна трудность заключается в том, чтобы точно сравнить результаты с аналогичными исследованиями в литературе, когда используются разные аналоги лунного реголита Таким образом, создание аналога реголита вклю чает в себя процессы формирования физико химического состава породы и обеспечение повы шенного электромагнитного поля Очевидно, что обычный индукционной системой обойтись затрудни тельно, т к заряд держится недолго и происходит разряд за счет заземления элементов, самой поро ды, а также
А
для земных есте ственных условий и редкий изотоп гелий-3, имеющий важное значение для развития ядерной энергетики будущего [8]. Создание системы производства аналога реголита Аналог лунного грунта должен максимально точ но воспроизводить поверхность Луны Лунный рего лит существенно отличается от любого земного ма териала из за отсутствия эффектов выветривания от ветра, воды и эрозии на Луне В зависимости от об ласти применения имитатор разрабатывается для имитации определенных характеристик, таких как химический состав, геотехнические свойства или объемные свойства Аналоги обычно разрабатыва ются на основе данных из возвращенных на землю миссией Apollo образцов. В настоящее время суще ствует
за счет быстрого снятия статического электричества Коллективом Центра инновационных горных тех нологий [2] была создана оригинальная установка, которая позволяет создавать заряд на аналоге грун та и тем самым обеспечивает возможность создания системы тестирования робототехнических комплек сов Предполагается, что при тестировании робото технических комплексов для перемещения по косми ческим объектам будет использоваться искусствен ный реголит, который обладает не только физико химическими и гранулометрическими свойствами, но и электромагнитными, что позволит оценивать объ ем налипания породы на элементы перемещения Собственно, система тестирования, включающая программу и методику испытаний, будет включать в себя оценку допустимых граничных условий зарядов породы поверхностей космических объектов, при которых будет производится перемещение
О реголите нам известно достаточно много, об разцы лунной породы были доставлены на Землю несколькими экспедициями
SiO2 42,9 45,0 44,2 48,5 47,0 45,0 40,5 72,2
ТiO 5,5 2,5 0,3 0,9 1,8 2,5 – 0,2 l2O3 13,9 8,9 19,1 17,2 14,5 11,8 0,8 13,4
FeO 20,2 22,2 6,9 14,4 7,3 1,8 5,5 0,6
Общие вопросы / General Issues 182 Таблица 2 — Химический состав образцов лунного грунта Table 2 — Chemical composition of lunar soil samples Оксиды Лунные породы Земные породы «Морские» районы «Материковые» районы Базальт Габбродиабаз Дунит Гранит Луна-16 Апполон-15 Луна-20 Апполон-17
MgO 6,0 9,1 13,4 8,9 7,7 0,2 0,2 0,6
Na2O 0,2 0,3 0,5 0,4 1,6 2,0 0,1 3,0 K2O 0,2 – 0,5 0,3 1,1 1,3 – 4,5 как пилотируемыми, так и непилотируемыми Кроме непосредственно изучения доставленного реголита в лабораториях, проводи лись исследования состава грунта непосредственно на поверхности Луны с помощью рентгенофлуорес центного анализа Организаторами этих исследова ний выступали два государства США и СССР, по по литическим причинам исследования велись по большей части параллельно, хотя некоторый обмен данными на официальном уровне происходил В СССР исследования проводили в замкнутом режиме, и иностранные коллеги не привлекались, США, напротив, рассредоточивала образцы между стра нами ООН, Африкой и Индией и аккумулировала ре зультаты достигнутые учеными в различных частях света [4].
ренные мате иков», наибо иям и реальн
9(3) ко гию до ис ос
космической г овации. — 201 к переработк Руды и метал требования к еляков, А В
ставляется на Земле х масшта техники и плуатации я перспек тирование значенных м, на пол , которые
Физико мех lith analogue prod


.
горно перера 16. 4. реголит of unr — Vol. 140. лунн mulant for in-s autica. — mediated. лунно , А 164 – 176 ts for lunar su Сокра конс Даст Испы , Позво мо приближенн напланетны достои вания искус напланетног создать дели и «циф к реальны условиям инствам пред ре го горнорудно систем, такж спытаний выс для техники унных и подма ив Центра ин тоящее врем ического буре логии добыч огии предпол овы для тест унта и метод ые в настоящ
— №
технических натурных ис конструкций вания подлу Коллекти логий в наст логии косми ния и техно ные технол честве осно зданного гру предложенн атура абатывающей С. 3-8. — Те кого минераль — № 2. — С оцессам и обо и др.] // Инно а для освоен льного образ efined sintere — pp. 517-53 ного грунта / ный situ2017.resource— ой пыли и ме С Видманов 6.. — Текст: н rface material BERNETICS ют соблюде свойств, но и одход сущес апланетных р атит время р струкций и те возможность Земле перед бъекты тания уникал максимально й эксплуатаци олит
реголита duction

ование ресур ый журнал эк венный uctural assess utica. — 2017
С. 358-382. t of a Martia ghlin // .2016.11.024A Д. Модели д аторных усл университет . Preparatio КИБЕРНЕТИКА / одства аналога р
тические
ение не т и электромагн ственно изм ресурсов. А им разработки, а ехнологий ь проведени д запуском на
напланетной 4.
дложенного м еголита и им ого оборудов же стоит отне соконагруженн и горной добы арсных ископа нновационны мя проводит о ения с низко чи воды из ре лагают испол стирования и дику проверки щей статье
К
ed lunar rego 36. — DOI: 10 Е Н Слюта utilization tes Vol. 131. етоды получе // Вестник С епосредстве ls / P. W. Wei
ям
м
нерных реше нных к услови
ивным предс созданного ромышленны ий на Земле ного для эксп едставляются щения и тест ов, предназ ским объекта оверхностей,
сственного
ва
С
пытаний на мические об 3.
Астрономи sting / A. N. S — pp. 45 ения потоков Самарского го нный iblen, M. J. M 2021;
ROBOTICS and 183
TECHNICAL CYB 3 обеспечиваю химических Такой п освоения на 1.
ик
оверхности / 013. — № 11
С.
ижения
2.







olith simulant 0.1016/j.actaas//

етода исполь митации усло вания и робо сти возможно ных элементо ычи и исполь аемых х горных тех отработку тех й степенью т еголита Указ льзование в скусственно и проходимос ков, П П Ана ьев, Р. В. Ме едственный воды из лунн 7-10. — Те А М Игнато (часть 2). / J. I. Steph stro.2017.09.0 ический вестн Scott, C. Oze 5-49. — D заряженных осударственн urawa, K. J. R ний ма лее ым зо вий то сть в и зо но но ре ан ка со ти, : , 18.en, , OI:Y. eid
нь ще ого кст
только физи нитных енит страте менно: апробации и
кспериментал sment
ых
ча ого
войства
Сёмкин
посредственн
работки
льных инжен о приближен ии ь более выве фровых двойн ым конструкц
ке космическ ллы. — 2017 к горным про Плотникова [ рсов
В Мещеряк едственный / П. П. Анань екст: непосре при добыче в 016. — № 9.
ханические св — Текст: неп an regolith sim Acta Astrona — Text: unm инамики дви овиях / Н Д а. — 2013. n of stimulant
в условиях
ия натурных а планеты и к
РОБОТ Ри F Заклю Та испол анало бах д обору на ко тивны робот для п ном 1. ев, К 2. ряков 3. грунта непос 4. М Н 10.10Tang,—Bena101–15.r—Tex6.2017.8. стиц аэрок 9. ТОТЕХНИКА и Т исунок 1 — Устан Figure 1 — Installa ючение аким образом льзование ис ога реголита для полноцен удования, пр осмических об ыми отработ тотехнически перемещения аналоге кос Перспектив О Беляков [ Методическ в, П В Ларио Технико эко а / П П Анан средственный Игнатова А Игнатов // М 110. — Текст: Stephen J. roya Haym // A xt: unmediated Слюта Е Н 14. — № 16/j.actaastrDevelopme5.nA.O’Louo Сёмкин Н. пылив лабор космического Weiblen P. W ЕХНИЧЕСКАЯ К овка для произв tion for the regol , перспекти кусственно в условно пр ных испытан едназначенн ъектах Пре ка перемещ х комплексо по космичес мических по ы развития к и др.] // Инно ие подходы нов [и др.] // номические ьев, К О Бе М Использ еждународны непосредств Indyk A stru cta Astronau
Литера
й отрасли / Р екст: непосре ьного сырья / С. 69-74. — Те орудованию овации. — 20 ния лунной по ования. — 20
11. Alifanov, O.M. et al., 2014. Fundamental'nye Kosmicheskie Issledovaniya. Kniga 2. Solnechnaya Sistema [Basic Space Research. Book 2. Solar System]. Moscow: FIZMATLIT Publ., p.456. (in Russian).
2. Ananiev, P.P. et al., 2017. Metodicheskie podkhody k pererabotke kosmicheskogo mineral'nogo syr'ya [Methodological approaches to the processing of space minerals]. Rudy i metally, 2, pp.69-74. (in Russian).
9. Weiblen, P.W., Murawa, M.J. and Reid, K.J., 1990. Preparation of stimulants for lunar surface materials. In: Engineering, Construction and operation in Space, II, pp.428-435.
6. Slyuta, E.N., 2014. Fiziko-mekhanicheskie svoystva lunnogo grunta [Physical and mechanical properties of lunar soil]. Astronomicheskiy vestnik, 5, pp.358-382. (in Russian).
Информация об авторах Ананьев Павел Петрович, к т н., Научно образовательный центр «Инновационные горные технологии (ЦИГТ), генеральный директор, 119049, Москва, Ленинский пр., д. 4c1А, cigt@mail.ru
12. Demidov, N.E., Bazilevskiy, A.T. and Kuz'min, R.O., 2015. Grunt marsa: raznovidnosti, struktura, sostav, fizicheskie svoystva, burimost' i opasnosti dlya posadochnykh apparatov [Mars soil: varieties, structure, composition, physical properties, drillability and hazards for lander]. Astronomicheskiy vestnik, 49(4), pp.243-261. (in Russian).
13. Cherkasov, I.I. and Shvarev, V.V., 1979. Gruntovedenie Luny [Moon Soil Science]. Moscow: Nauka Publ., p.232. (in Russian).
5. Stephen, J. I. and Benaroya Haym, 2017. A structural assessment of unrefined sintered lunar regolith simulant. Acta Astronautica, 140, pp.517-536. DOI: 10.1016/j.actaastro.2017.09.018.
7. Scott, A.N. et al., 2017. Development of a Martian regolith simulant for in-situ resource utilization testing Acta Astronautica, 131, pp.45-49. DOI: 10.1016/j.actaastro.2016.11.024.
3. Ananiev, P.P. et al., 2016.Tekhniko-ekonomicheskie trebovaniya k gornym protsessam i oborudovaniyu pri dobyche vody iz lunnogo grunta [Technical and economic requirements for mining processes and equipment for the extraction of water from the lunar soil]. Innovatsii, 9, pp.7-10. (in Russian).
References
4. Ignatova, A.M. and Ignatov, M. N., 2013. Ispol'zovanie resursov regolita dlya osvoeniya lunnoy poverkhnosti [The use of regolith resources for the development of the lunar surface]. Mezhdunarodnyy zhurnal eksperimental'nogo obrazovaniya, 11 (part 2), pp.101-110. (in Russian).
1. Meshcheryakov, R.V. et al., 2016. Perspektivy razvitiya kosmicheskoi gorno-pererabatyvayushchei otrasli [Prospects for the development of the space mining and processing industry]. Innovatsii, 4, pp.3-8. (in Russian).
8. Semkin, N.D. and Vidmanov, A.S., 2013. Modeli dinamiki dvizheniya lunnoy pyli i metody polucheniya potokov zaryazhennykh chastits pyliv laboratornykh usloviyakh [Models of the dynamics of motion of lunar dust and methods of obtaining flows of charged particles of dust in laboratory conditions]. Vestnik Samarskogo gosudarstvennogo aerokosmicheskogo universiteta [Samara SAU Bulletine], pp.164-176. (in Russian).
Общие вопросы / General Issues 184 // Engineering, Construction and operation in Space II. — 1990. — pp. 428-435. — Text: unmediated. 10. Анатолий Ализар NASA готово к постройке орбитальной станции для ремонта и заправки спутников / Ализар Анатолий // Хабр: [сайт]. — URL: https://habr.com/ru/post/380907/ (дата обращения: 04.08.2021). — Текст: электронный 11. Фундаментальные космические исследования Книга 2. Солнечная система / О М Алифанов, Н А Анфимов, В С Беляев [и др.]. — Москва: ФИЗМАТЛИТ, 2014. — 456 c. — Текст: непосредственный 12. Демидов Н Э Грунт марса: разновидности, структура, состав, физические свойства, буримость и опас ности для посадочных аппаратов / Н Э Демидов, А Т Базилевский, Р О Кузьмин // Астрономический вест ник. — 2015. — том 49, № 4. — С. 243-261. — Текст: непосредственный 13. Черкасов, И И Грунтоведение Луны / И И Черкасов, В В Шварев. — Москва : Наука, 1979. — 232 c. — Текст : непосредственный 14. Гирина О А Пирокластические отложения современных извержений андезитовых вулканов Камчатки и их инженерно геологические особенности / О А Гирина. — Владивосток : Дальнаука, 1998. — 174 c. — Текст: непосредственный
14. Girina, O.A., 1998. Piroklasticheskie Otlozheniya Sovremennykh Izverzheniy Andezitovykh Vulkanov Kamchatki i Ikh Inzhenerno-Geologicheskie Osobennosti [Pyroclastic Deposits of Modern Eruptions of Andesitic Volcanoes in Kamchatka and Their Geotechnical Features]. Vladivostok, Russia: Dal'nauka Publ., p.174. (in Russian).
10. Alizar, A., 2015. NASA gotovo k postroyke orbital'noy stantsii dlya remonta i zapravki sputnikov [NASA is ready to build an orbital station for repair and refueling satellites]. Available at: <https://habr.com/ru/post/380907/> (Accessed 04 August 2021). (in Russian).
Alexandr S. Timofeev, PhD in Technical Sciences, Academician N.V. Melnikov Institute for the Problems of Complex Development of Subsoil of RAS, Senior Research Scientist, 4, Kryukovsky tupik, Moscow, 111020, Russia, timofeev_ac@mail.ru
Anna P. Plotnikova, Scientific and Educational Center «Innovative mining technologies», Deputy General Director, 4c1A, Leninsky pr., Moscow, 119049, Russia, cigt@mail.ru
Information about the authors
Pavel P. Anan’ev, PhD in Technical Sciences, Scientific and Educational Center «Innovative mining technologies», General Director, 4c1A, Leninsky pr., Moscow, 119049, Russia, cigt@mail.ru
Roman V. Mesсheryakov, Doctor of Technical Science, Professor, V.A. Trapeznikov Institute of Control Sciences of RAS, Leading Research Scientist, 65, Profsoyuznaya ul., Moscow, 117997, Russia, mrv@ieee.org
Информация В Южной Корее создали робота-хамелеона, который маскируется под окружающую среду в реальном времени Инновационную разработку представили иссле дователи Сеульского национального университета Робот действительно похож на рептилию — умеет ползать и оснащён искусственной электронной ко жей, которая меняет цвет в зависимости от поверх ности, по которой он движется Для этого учёные разделили конструкцию на сег менты и оснастили их термохромными жидкими кри сталлами Под кожей расположились нагреватели на основе серебряных нанопроволок, а на нижней части живота — десятки датчиков, которые отслеживают оттенки под ногами Блок управления в реальном времени обрабаты вает показатели сенсоров, запускает необходимые нагреватели, а жидкие кристаллы меняют цвет в за висимости от температуры Заявленное время от клика — полсекунды Изменение цвета — не единственное достижение разработчиков Как настоящий хамелеон, робот не просто отображает окружение, но и старается маски роваться под него В этом помогает многослойная система паттернов, воспроизводящая на коже узоры, полосы и завитки Терморегулирование жидкокристаллического по крытия имеет несколько ограничений Во первых, его легче нагреть, чем охладить, поэтому «кожа» не мо жет менять цвет с красного на синий так же быстро, как наоборот Во вторых, диапазон рабочих темпера тур ограничен: он варьируется от комнатных 25 гра дусов до «человеческих» 36. На робота могут повли ять и окружающие факторы — например, прямые солнечные лучи Тем не менее разработчики про должают совершенствовать технологию Они плани руют ускорить рефлексы робота и внедрить в кон струкцию систему охлаждения Полное исследование опубликовано в журнале Nature Communication. (По материалам сайта DTF)
Konstantin O. Belyakov, Tomsk State University (TSU), Administration Advisor, 36, Prospekt Lenina, Tomsk, 634050, Russia, belyakovko@gmail.com
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 185 Плотникова Анна Валерьевна, ЦИГТ, заместитель генерального директора, 119049, Москва, Ленинский пр., д. 4c1А, cigt@mail.ru Тимофеев Александр Сергеевич, к т н., Институт проблем комплексного освоения недр им академика Н В Мельникова РАН (ИПКОН РАН), с н с., 111020, Москва, Крюковский туп., д. 4, timofeev_ac@mail.ru Мещеряков Роман Валерьевич, д т н., профессор, Институт проблем управления им В А Трапезникова РАН, г н с., 117997, Москва, ул Профсоюзная, д. 65, mrv@ieee.org Беляков Константин Олегович, Национальный исследовательский Томский государственный универси тет (ТГУ), советник ректората, 634050, г Томск, пр Ленина, д. 36, belyakovko@gmail.com
OI:186-19510.31776/R
RTCJ.9304
:
ча
обеспечение / In рмацион
сшего
с кий , Т . Х . образовател ь С ТАНКИН » ( Ф Г zelensky a ал поступил в р
льном врем интерполя
s of a
х
едеральное
ия s-образно ётом заданны ия s-образно ивания Выбо подач на сты ть максимум офиля скорос который позво равильности в ностей сложн
Features
Federal S bstract this paper we ear-spline inte put data for the a particular a gment junction ervals and the unding errors, ur. The experim the CNC for h
(Received
мени s-обр яции повер
Абдулли н ное учрежден Г БОУ ВО « МГ Т a@gmail.com едакцию 08
S tate Educatio(FGBnO considered th erpolation, tak
ой
ное обе
Инф УД C.DO Ос Ф с т Ан В р лин под кад дли Каж ват при экс при Кл Ал лов Бл Исс гос Ab In t oftorointseofinlinepgeuut формационное о Инфор
построен и
urve constru d surfaces
eleration Technolo g
лагодарности следование в сударственног
e s-curve wer acceleration/den,andthegiveirroundingwthemethodomentaldataoigh-speedma formation Supp
и
ия с бюджетное Матери построен оляции с учё ля построен одуле сглажи х скоростей может имет ровании про о деления, к говорят о пр отке поверхн , s-образн ения, СЧПУ, финансово роект NoFSFS

zelenskyaa@ g deceleration c e contour acce d the scygmentgeometrlengthsegmentcanevelocityproitpossibletohosenapproa
h me with te. sechoiceTheatthentimeatefortycon-aspart
ивание траект тра кадров образо
вой разгон сложной ф реал ное ускорение ны в алгорит разгона/торм кинематиче алов и их окр нсаций ошибо онтурной скор его реализац
Alexandpiecereal-tw
осковский гос у сийская Феде р льном времен е, рывок и ско тме предпрос можения зави еских огранич ругление буд ок округлени рости Получ ции в составе , систем РФ в р
ннотация работе рассм нейно сплайн дачи Исходн дров и геоме ины сегмента ждый сегмен ть неточност именен метод сперименталь и высокоскор
cting in real tim , and feed rat module. The le feed rates ximum of seve e, to compens s in the velocit plementation a
ючевые сло горитм плани вого программ
жения у дар ация , ни при орость смотра сит от чений дет да я был енные СЧПУ ма чис рамках
тории
ие
ная кривая ра реальное вре поддержке S-2020-0031)
ime s-shap ise linear i er A. Zele n al Institution o U VO «MST « e problem of ing into accou e defined in th celeration st en kinematic ill produce ina f half chiningbtaineddivisionindicaofsur port
г о т венный техн о
мотрена зада новой
f
июн ой кривой раз ых ограничени ой кривой был ор конкретно ыке сегменто семь времен сти Поэтому олил убрать выбранного п ной формы азгона/тормож емя, алгоритм Министерств oration/decenofcompirKh.Abdu a tion «Moscow S M oscow, Russia , 08 June 2021) Esacceleration/dtraintsonthealgorithmanddsontheseachtrajectoryhenformingth,whichmadectnessofthecmplexshapes разной кри рхностей с , А . В . Але ие высшего о б У « СТАНКИН » ) я 2021 года ) згона/тормож ий на контурн ли определе й стратегии р ов и заданны нных интерва у для компен разрывы в ко подхода для е жения, сглажи м предпросмо ва науки и вы
ped acceler ninterpolatiosky Tagi Higher Educa « STANKIN»), M an s-shaped a unt given cons he narategylookaheaddepenconstraints.Eccuracieswhwasapplied,atethecorrecrfaceswithcom186

,
пко б разования « М о ) , Москва , Рос с жения в
ования
интерп ные данные д етрическом м а, допустимы т траектории и при форми д половинног ьные данные ростной обраб ова ирования пода много управл и выполнено пр го задания (п
в реал инейной . А . Зелен
и кусочно-л А сударственн о логический у н
i V. A lepko g ical Universit y mail.com urve construct eleration, jerk, ric smoothing , the allowabl n have a max file. aremoveThereforegapschforitsimp
y «STANKIN»
спечени
ДК 519.688
собенност при
ucting with
на/тормож формы
ulex-shapecudllin,Andre tate
.
иверситет « С (
е
чи
Введение Алгоритм планирования скоростей подач являет ся важнейшим компонентом системы числового про граммного управления (СЧПУ) и оказывает суще ственное влияние на качество обрабатываемой по верхности при высокоскоростной и высокоточной обработке деталей
Acknowledgements
Key words
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 187
совместно с алгоритмами предпро смотра кадров и сглаживания траектории, включаю щие в себя параметрическую интерполяцию Планирование подачи представляет из себя не тривиальную задачу оптимизации, которая может быть выполнена при помощи оптимальных по време ни методов и близких к оптимальным (квазиоптималь ных) решений [4]. Первая группа [5, 6, 7] имеет очень высокую вычислительную сложность и при увеличе нии количества ограничивающих параметров, т е при добавлении дополнительных кинематических ограни чений, не будет давать оптимального решения [7]. Реализация таких алгоритмов в режиме реального времени непосредственно в самой системе управле ния невозможна из за ограниченных ресурсов вычис лителя, поэтому наиболее подходящим их примене нием являются постпроцессоры CAM-систем Квазиооптимальные методы обычно подчиняются определённым законам изменения контурной скоро сти, ускорения и рывка, а также требуют меньших вычислительных
множества сверхкоротких линейных сегментов. Предварительно в геометрическом модуле все кадры управляющей программы с линейной интерполяцией G01 преобра зовываются в линейно сплайновый сегмент, в кото ром сплайновый участок описывается симметричным кубическим B-сплайном с пятью контрольными точ ками Формирование s-образной кривой реализовано в два этапа: на первом этапе в модуле предпросмот ра определяются допустимые значения скоростей подач в точках сопряжения кадров, расположенных в середине сплайна, затем полученные данные пере даются непосредственно в сам планировщик, где осуществляется расчёт кинематических параметров
Feed-rate planning algorithm, s-shaped acceleration/deceleration, , trajectory smoothing, numerical control system, real-time, frame preview algorithm.
The research was carried out with financial support of Ministry of Science and Higher Education of Russian Federation in the frame of state assignment (project no.FSFS-2020-0031). сложных геометрических форм [1]. Сформированная в CAM-системе управляющая программа для таких деталей, при достаточно хоро шей аппроксимации поверхности изделия, обычно состоит из множества кадров, формирующих кусоч но ломанную траекторию, где длина каждого сегмен та очень мала Применение наиболее простого трапецеидально го метода планирования подач [2, 3] в системе управления имеет ряд серьезных недостатков По причине того, что траектория перемещения инстру мента представляет из себя ломаную кривую, при её отработке в местах сопряжения сегментов будут наблюдаться разрывы в контурной скорости и резкая смена вектора направления движения, что приводит к снижению точности обработки, динамическим уда рам на станок и ухудшению качества обрабатывае мой поверхности [1, 4]. Поэтому, обычно, в точках сопряжения сегментов скорость подачи занижают до значений, близких к нулевым Такой подход ведёт к существенному снижению общей производительно сти и увеличению амплитуды вибраций узлов станка, что может привести к его разрушению Решение обо значенных проблем состоит в использовании метода планирования скоростей подач с ограничением кон турного рывка затрат В процессе планирования подачи наиболее часто применяется алгоритм поло винного деления [1, 8] или итерационный метод Ньютона Рафсона для решения полиномиальных уравнений высших порядков [9–11]. Выполнение данных алгоритмов в системах управления обычно осуществляется в модуле предпросмотра кадров, который в зависимости от производительности аппа ратной платформы может выполняться как заранее в автономном режиме [1], так и в режиме реального времени с тактом работы в 4…10 мс [10, 12], такт интерполяции при этом лежит в диапазоне от 100 до 500 мкс [12, 13]. На практике довольно трудно до биться полноценного соблюдения всех кинематиче ских ограничений вдоль s-образной кривой при ис пользовании квазиоптимальных способов [14]. При чина этого состоит в том, что время разго на/торможения в системе управления выполняется за кратное число тактов интерполяции и при соот ветствующей стратегии округления временных па раметров будет возникать рассогласование контур ной скорости и нарушение заданных кинематических ограничений на стыке сегментов Оптимизация ско рости подачи методом половинного деления позво лила бы решить данную проблему и скомпенсиро вать возникающие ошибки округления Таким образом, в статье рассматривается квази оптимальный метод планирования подачи, не нару шающий заданных кинематических ограничений на контурный рывок и ускорение, на примере кусочно ломанной траектории, состоящей из
v v v 2 v A v 6v A 188
ти
)
max1 Jt maxAt maxmax3 Jt At maxAt maxmax7 Jt port
Исход сегмента начально мента La тическая графики рости (v t ()jt по в интервал фа ветствует фа равноуско фа постоянн орая фаза л ветствует зам нтегрировав ф олучить выра бразом получ и (табл. 1): 0 t скор profile calculating
соот ствует
та скоро (1) 3 ax 3 3 ax7





остоянного ус нному
ия ускорения, ния
Инф про ми Ри п k ни v k уск Figw(k tk relspma τ 1 2 3 4 5 6 7 формационное о офиля скоро зация сунок 1 — Диагра при ограничении ого ( 1,2,.k ия: tk – абсолю vk – скорость в к относительно 1ttk ; At корения; maxJt ure 1 — Diagram with a tangential je 1,2,...,7 ) in is the absolute w peed at the end of ative processing t aximum tangentia kk j(t)=s maxJt 0maxJt 0maxJt 0maxJt обеспечение / In сти подачи и амма процесса s и тангенциальног .,7 ) интервала ютное время отра конце интервала ое время отработ maxt – максимал максимальное з of the s-shaped a rk and acceleratio nterval, the follow working time, sk the interval, Tk time of each inter l accelerationjerkvaluva Т (t) ak J mAt mAt formation Supp его послед образного разго о рывка и ускор введены следую ботки, sk – про , Tk – время отр ки каждого инте ьное значение та начение тангенц cceleration / dece n limitation, whe ing designations is the distance tra is the processing val, i.e. k t e; maxJt – max lue аблица 1 — Соо Table 1 — Re k (t)=s(t)
для профил ны в виде сл й скорости ( й скорости по движения, пути ()s t , та ального ускор ет состоять и о возрастани у движ движен линейного во медленному д функцию рыв ажение для у чаются соотн 0
at и из семи
ирования ско ледующих да ( ,)s vve длин одачи fc . Ки где предста ангенциально рения () врем , соответ , со , ускор жению; , со нию; у движению вка ()jt от 0 ускорения (a ошения для 0
рывка
();() ∫ t atdtst рости s 1 vs 112 s v 223 12 s v A 3s 44 5s v 55 6s v 667 12 s v A
ы
ускоре 0
ствует ус фа равномер вто соответст вто ствует ра вто ния, соот Проин можно по ким же об сти и пути 0 () ∫ t at J асчёта s-образно shaped velocity p kk v(t)=s(t) 2 max 112 vst J 1max2 vt A max3ma12 Att J 3v 2 4max 512 vt J 5max6 vAt max7ma12 Att J я часть дные данные представлен ой и конечной arc и заданной диаграмма изменения п ) , тангенциа времени, буде ов (рис. 1): аза линейного т ускоренному аза
();() ∫

озрастания
0max5

2 x 3 2 ax7









орости анных: сег инема влены ой ско енных оответ , оответ до t , t ,
ускорения
ускорения
тношения для ра elations for the s-
оренному дви аза линейного коренному дв аза постоян рному движен орая фаза л твует замедл орая фаза по авнозамедлен
(). ∫ t vtdt sk (t) 3 max116 Jt 2 2 max 212 At max3m2a16 Att J 34 v 3 5 max 516 Jt 2 6 max 612 At max7m2a16 Att J
Основна
J tdtvt ого профиля
ующая опти она/торможения ения, где для ющие обозначе йденный путь, работки, k –рвала, т е ангенциального циального рывка eleration process re for the k -th are introduced: aveled, vk is the time, k is the 1tk ; maxAt –ximum tangential
ствует рения
движению; ного ускорен ижению; о убывания у вижению; ной скорост нию; инейного убы енному
соответ ывания
КИБЕРНЕТИКА
ительность равна нулю, т и заданных па ть недостато жения на всех ет существова рабатываемы ся по длине н тствует Одн иля скорости ории можно у ории: где присутств и этом длина жения заданн
(3)(2)





















(4): отработки к рассчи араметрах очным для х семи ин ать 17 ти ый сегмент на то, к ка ако перед и, все пре упрощённо вует толь а сегмента ной скоро менно при длина сег ь заданной льно суще а сегмента сти подачи и реализу но рассчи ади трапе (5) TECHNICAL CYB 9 Рисунок 2 — Пр в коротком се 1, 2, 3 фазы (б тормо Figure 2 — Velo short segmen phases 1,2,3 (б); C учётом 2в) макси m|||Att A max1 m tt JTA Принима (табл. 1), м скорости ve BERNETICS а) в) рофили скорости егменте: 1 и 3 фаз б); торможение в ожение в коротко ocity profiles for a t: phases 1 and 3 ; braking in a shor in short segme м того, что в имальное max| , получаю maxmax5; t JT A ая во внимани ожно вывест : и для короткого т азы (а); разгон в к в коротком сегме ом сегменте: 5, 6 a short segment ty 3 (a); acceleration rt segment: 5 and ent: 5,6,7 phases коротком се ускорение ются следующ maxAt ие соотношен ти выражени 2021; б) г) типа сегмента, ра коротком сегмент нте: 5 и 7 фазы ( , 7 фазы (г) ype, acceleration in a short segmen d 7 phases (в); bra (г) егменте (рис max tt AA щие неравенст (6 ния 1()s t и 3s е для конеч 9(3) згон е: в in);at:king 2а, и ва: ) 3() t ной
ROBOTICS and

/
РОБОТ Дл 1 T T ускор (табл терва образ 1 T T для ф 4 L T где s путь н 5 T T В k ого танны ускор осуще терва пов п траек кому получ образ класс ко раз Larc сти по сутств мента скоро ствует Larc fc Ис ется с тать г ции (р 1231357567 a a d d s s s s ТОТЕХНИКА и Т ля упрощен 3T и 5 7T T рения 1()at , a . 1), продолж ала на этапе зом: 32maxmax; t t A T J фазы постоян , arcad c ss f sa – пройден на этапе торм 76maxmax; t t A T J действител о интервала м ый путь сегме ения и рывк ествления ра алах Поэтому рофилей [1], ктории должен типу профил чением конкр зованные сегм сифицировать короткий ти згон или тор недостаточна одачи fc ; средний ти вуют фазы р а Larc также ости подачи f длинный ти т фаза посто позволяет до сходя из того симметрия, т геометрическ рис. 2): (),151()22(),1()(2 se se se se vvT vv vvT vv ЕХНИЧЕСКАЯ К ия расчёто Рассматр 3()a t и скоро ительность разгона вы max cs t t t fvA AJ ной скорости ный путь на ожения Для max ce t t t fvA AJ ьности дли ожет быть р нта Larc при а может быт згона/тормож всего може и каждый отр проверятьс я он соответ етного профи енты траекто на три катего п сегмента, можение, при для достиж п сегмента, г азгона и то не позволяе c ; п сегмента, янной скоро стигнуть зад , что в проф о пройденны и из формул 21256,2). TT TT
ется, что жения для 2() t , 3()vt аждого ин ледующим



она, sd –ожения
где обязател ости и длина анной скорос
189
филе скорости ый путь можн лы для площа
maxmax,t и: а этапе разго я фазы тормо maxmaxt t

ов принимае ивая выраж ости 1()vt , 2v отработки ка ыражается сл


где одноврем орможения, д ет достигнуть

рассчитать расчётные значения пути, скорости и ускорения для каждой из фаз разгона/торможения С учётом выве денных соотношений из таблицы
Информационное обеспечение / Information Support 190 11max3max2213.22 tt est vvJTJT AT (7) Его вид с учётом соотношений (2): max1max132 est est vvJTT vvJT (8) Откуда можно выразить 13,TT , и проделав анало гичные преобразования, можно получить выражения для 5T и 7T : 1357maxmax,. esse tt vvvv TTTT JJ (9) После подстановки соотношений (9) в (6) и воз ведения обеих частей в квадрат, получаются нера венства (10) для разгона и торможения соответ ственно, позволяющие определить существование фазы постоянного ускорения (рис. 2б, 2г): 2222maxmaxmaxmaxmaxmax22maxmax,,,⎧⎧⎪⎪ ⎨⎨ ⎪⎪⎩⎩ tt esse tt tt esse tt AA vvvv JJ AA vvTvvT JJ (10) Заменяя 1256,,, TTTT в (5) и учитывая неравен ства (10), можно получить окончательные соотноше ния для пути разгона sa при s vve : max2max 13 max 123 maxmaxmax2maxmax, 1(),2 ⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪⎛⎞ ⎜⎟ ⎪⎝⎠ ⎪ ⎪ ⎩ es se t t es a t a a tes se tt t es t vv vv J A если vv s sJ s A vv vv JA A если vv J (11) для пути торможения sd при vves : max2max 57 max 567 maxmaxmax2maxmax, .1(),2 ⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪⎛⎞ ⎜⎟ ⎪⎝⎠ ⎪ ⎪ ⎩ se se t t se d dt d tse se tt t se t vv vv J A если vv s sJ s Avv vv JA A если vv J (12) Данные соотношения будут составлять условие короткого типа сегмента s sconda s или s scondd s (рис. 2). В том случае, если s arc Lcond s , то линейно сплайновый сегмент траектории будет относиться к среднему или длинному типу Условие для длинного типа сегмента можно выразить как: l a scondd ss (13) где sa – путь разгона из (11), в котором vfec sd –путь торможения из (12), в котором s vfc Сегмент будет относиться к среднему типу, если sl scondarccond Ls В данном случае максимальная ско рость подачи max fc f будет неизвестна и для его поиска необходимо использовать итерационный ал горитм половинного деления с заданной погрешно стью Условие среднего типа сегмента m scond рас считывается аналогично соотношению (13), путь раз гона оценивается из (11), где max s vf , а путь тормо жения из выражения (12), где max e vf Итерацион ный поиск maxf продолжается до тех пор, пока вы полняется условие: (). m abssLcondarc (14) На следующем этапе производится выбор кон кретного типа профиля и расчёт времени отработки каждой фазы Tk , которой соответствует кратное число тактов интерполяции, т.е.: , ⎡ ⎤ ⎢ ⎣⎥ ⎦ k k s T
типа сегмента
: max1 ˆ Atts JNT (16) 2 1max1 2ˆˆˆ313max31212⎧ ⎪ ⎨ ⎪ ⎩ sts tsts vvJNT vvANTJNT (17) 3 11max1 ˆˆˆ31133max3231611ˆ26⎧ ⎪ ⎨ ⎪ ⎩ ssts ststs svNTJNT ssvNTANTJNT (18) где ˆ Att A , 13,NN – целое число тактов, ˆˆ13, vv – рас чётные скорости в конце первой и третьей фаз соот ветственно Такие же соотношения будут справедли вы и для других типов профилей Выбранная стратегия округления (15) в действи тельности будет давать меньший путь по сравнению с расчётным значением, т е ˆˆ133133 saasss Кро ме того, конечная расчётная скорость в конце сег мента не будет равна запланированной, определён ной на этапе предпросмотра кадров, т.е. ˆ3 vve при разгоне и ˆ7 vve при торможении Использование расчётных скоростей подач в конце сегмента при
где floor [ ] – округление вещественного числа в меньшую сторону до целого, s Tconst – длитель ность такта интерполяции Откуда можно 1 для короткого получим
T (15)
Nfloor
еделы по mJt удет уменьша ься по време требуется а путь, чтобы (2 ь, включающ 1 и ˆ33 N N ый недоездом учая сегмент 2 2 1 N в п площадь тра в фазу постоян мента: 5 и 7 фазы

573 ,,ˆˆb vvbb – скоро после процесса симальной скоро ath erem in the co short segment typ 3,5,7 phases (б), h and 7th phases, m is the approach ся, то требуе ю с исходны ничения на ус я Поэтому, ч паса пути ere а (20), предла осмотра кадр я скорость по консервативн 9(3) ax ть ни, на не 0) ий 1 , в а с ро пе ной (а), сти сти pathe:nтся ми ко то m и га ов, да ого






























РОБОТ перех сегме на ко возни таким разни V Рисун ускоре кор Figuretion A type o Оп итера данно чина типа соотв С гео будет котор накло (рис если одном проце ТОТЕХНИКА и Т ходе от текущ енту будет пр онтурное уско икает необход м образом, ч ицу скоростей ˆ3e vv нок 3 — Геометр ения ˆ bAt (а) и ˆ A роткого типа сегм значение танген 3 — Geometric ill ˆ bAt (а) and ˆma bAt of segment theduringtan птимизация у ационного ме ой точностью ускорения A сегмента б ветствующих ометрической т представля рого можно она его рёбер 3). Практиче добавлять ко му дополните есс оптимиза ЕХНИЧЕСКАЯ К его m ого к иводить к на рение и ры димость в о тобы миними : а) б) ическая иллюстр ˆmax bAt (б) методо ента при разгоне циального рывк ustration of the s ax (б) by the acceleration,meth ˆ Jt gential jerk after скорения ре тода полов v , где опре ˆ bAt , которая удет сопров рывков для точки зрени ть из себя корректирова и смещения ским путем времени от льному такт ции (рис. 3а КИБЕРНЕТИКА / следующему арушению огр ывок По этой птимизации изировать сл рация поиска опт ом половинного д е, ˆmaxJt – макси ка после оптимиз earch for the opti hod of half divisio maxt – the optimizationmaxim ализуется пр инного деле еделяется но на примере вождаться ут первой и тре ия функция треугольник, ать путём и я одной из ег было обнару тработки 1N ту и затем п а), то станов ROBOTICS and 19 у 1m му раничений й причине ускорения ледующую (19) тимального деления для имальное зации mal acceleraon for a short mum value of ри помощи ения с за овая вели короткого точнением етьей фаз ускорения площадь изменения го вершин ужено, что и 2N по проводить вится воз TECHNICAL CYB 1 можным уло Исходная ве ся, а s-обра вследствие лизировать выйти за сле ˆ arc sa Le где ˆˆ3 s s первую и тр arcss evT предыдущем фазой посто цессе оптим ции (рис. 3б Рисунок 4 — Р скорости и фаз средний тип се в конце 1, оптимизации, Figure 4 — Dis stant5velocityand7ph 5ˆˆˆ13,, vvvbbb respectively, aft Если нер выполнить значениями рение и рыв бы гарантир обеспечить ется исполь при которой чи ve опред BERNETICS ожиться в за еличина уско азная кривая чего после о суммарный едующие пре ,arc , ˆ3 s – рас ретью фазы п остаток пут м 1m сегме оянного ускор мизации корр ). аспределение ос зу сопряжения, ко егмента: 1, 3, 5, 7 3, 5 и 7-ой фаз с Stailm – путь до stribution of the re phase and the con hases (a), middle s ,ˆ7 vb – velocities a er the inoptimizatiothemaxim равенство (20 повторную 1N и 2N , но вок не будут ровать сущес выполнение зовать страт начальная v делялись бы аданные пре орения ˆ At бу я растягивать оптимизации расчётный еделы: счётный пут при ˆ11 N N ти, вызванны енте. Для слу рения при ˆ2N ректируется а) б) статка пути erem ороткий тип сегм фазы (б), 1 ˆˆ3, b vvb соответственно п оезда в зоне макс emainder of the pa njugation phase, segment type: 1,3 at the end 1,3, 5th on process, Stailm mum speed zone 0) нарушаетс оптимизацию о тогда огран соблюдаться ствование зап неравенства тегию предпр vs и конечная для более к 2021;

Инф ры ния мож erem где sali себ вую из Р формационное о вка max 9 Jt я на maxAt В жно записать m sstailalign е stail – путь ign – путь в ф бя сверхкоро ю длительнос известной в исунок 5 — Резул Figure 5 обеспечение / In max97.5% Jt п таком случа ь как: narcarc eL доезда в фа фазе сопряже откую симмет стью два так величины льтаты эксперим Results of expe formation Supp ри сохранени е остаток пу ˆ , s зе постоянн ния, предста ричную s-об та, которая V При это ентов, геометри riments, geometr port ии ограниче ути сегмента (21) ой скорости, авляющий из бразной кри оценивается м возможны ический контур «б ric contour of the « 192 а з я ы варианты равны н 0salign , Если в со нимум в о чать в се лучшей располага для корот (рис. 4а), а) б) бабочки» (а); гра «butterfly» (a), gr ы, когда путь улю, в час и если erem оотношении один такт, то ебя его распр производител аться в зоне ткого типа бл а для средне афики тангенциал aphs of tangentia сопряжения стности, есл m vTes , то s (21) stail укла следующий ределение вд льности пут е максималь лока при тор его типа в сер льной скорости, l speed, accelerat и/или путь д ли esremalig 0stail и salig адываются к этап должен доль сегмента ь доезда д ьной скорост рможении в н редине (рис ускорения и рыв tion and jerk (б) доезда gn , то 0 gn ак ми вклю а Для должен и, т е начале 4б). вка (б)































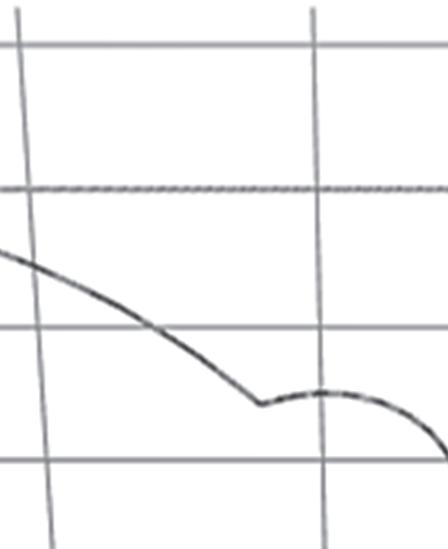


















РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 193 Эксперименты проводились в специальном ПО симуляции системы управления, написанной на язы ке C++, которая состояла из следующих модулей: контроллера движения, интерпретатора, модуля предпросмотра кадров и планировщика скоростей подач Тестовый контур описывает геометрическую фигуру в виде бабочки (рис. 5а), которая состоит из множества коротких сегментов линейной интерполя ции G01, сформированных в CAM-системе Гемма 3Д В качестве исходных данных для симуляции при нимались следующие параметры: заданная скорость подачи 166.667fc мм/с (10 м/мин), центростреми тельное ускорение max 498An мм/с2, центростреми тельный рывок max 2000Jn мм/с3, тангенциальное ускорение max 498At мм/с2, тангенциальный рывок max 2000Jt мм/с3, хордовая ошибка построения сплайна 0.005 мм, допуск ошибки сплайновой аппроксимации 0.1k мм, период интерполяции 400Ts мкс, точность поиска скорости 8 max 10 f мм, точность поиска ускорения 109 v мм/с. Результаты экспериментов (рис. 5б) показывают выполнение заданных ограничений на контурное ускорение, рывок и скорость подачи для всей траек тории движения инструмента Заключение В данной статье был реализован программный модуль планировщика подачи, работающий сов местно с алгоритмом предпросмотра кадров, кото рый предназначен для системы управления трехко ординатного станка Также были рассмотрены ос новные особенности построения s-образной кривой разгона/торможения в реальном времени для траек тории, состоящей из линейно сплайновых сегментов. В профиле скорости было выделено семь временных интервалов, которые характеризуются определен ным временем отработки Округление временных параметров в меньшую сторону создаёт разрывы в контурной скорости при сопряжении сегментов Предложенный подход планирования подачи с при менением метода половинного деления и использо вания фазы сопряжения дало возможность убрать разрывы в контурной скорости в точках стыка сег ментов, а полученные при этом экспериментальные данные говорят о правильности выбранного подхода
4. Toolpath Interpolation and Smoothing for Computer Numerical Control Machining of Freeform Surfaces: A Review / Wen-Bin Zhong, Xi-Chun Luo, Wen-Long Chang [et al] // International Journal of Automation and Computing. – 2020. – vol. 17. – pp. 1-16. – DOI: 10.1007/s11633-019-1190-y (accessed: 11.08.2021). – Text: electronic.
8. Beudaert X. Feedrate interpolation with axis jerk constraints on 5-axis NURBS and G1 tool path / X. Beudaert, S. Lavernhe, C. Tournier // International Journal of Machine Tools and Manufacture. – 2012. – vol. 57. – pp. 73–82. –DOI: 10.1016/j.ijmachtools.2012.02.005 (accessed: 11.08.2021). – Text: electronic.
10. Ming-Tzong Lin. Development of a dynamics-based NURBS interpolator with real-time look-ahead algorithm / Ming-Tzong Lin, Meng-Shiun Tsai, Hong-TzongYau // International Journal of Machine Tools and Manufacture. –
1. Xu Du. A complete S-shape feed rate scheduling approach for NURBS interpolator / Xu Du, Jie Huang, Li-Min Zhu // Journal of Computational Design and Engineering. – vol. 2. – no. 4. – 2015. – pp. 206–217. – DOI: 10.1016/j.jcde.2015.06.004 (accessed: 11.08.2021). – Text: electronic.
Литература
6. Dong J.Y. Feed-rate optimization with jerk constraints for generating minimum-time trajectories / J.Y. Dong, P.M. Ferreira, J.A. Stori // International Journal of Machine Tools and Manufacture. – 2007. vol. 47. – no. 12–13. –pp. 1941–1955. – DOI: 10.1016/j.ijmachtools.2007.03.006 (accessed: 11.08.2021). – Text: electronic.
9. Sung-Ho Nam. A study on a generalized parametric interpolator with real-time jerk-limited acceleration / SungHo Nam, Min-Yang Yang // Computer-Aided Design. – 2004. – vol. 36. – no. 1. – pp. 27–36. – DOI: 10.1016/S00104485(03)00066-6 (accessed: 11.08.2021). – Text: electronic.
7. Sencer B. Feed optimization for five-axis CNC machine tools with drive constraints / B. Sencer, Y. Altintas, E. Croft // International Journal of Machine Tools and Manufacture. – 2008. – vol. 48. – no. 12–13. – pp. 733–745. –DOI: 10.1016/j.ijmachtools.2008.01.002 (accessed: 11.08.2021). – Text: electronic.
3. Hu J. An optimal feedrate model and solution algorithm for a high-speed machine of small line blocks with look-ahead / J. Hu, L. Xiao, Y. Wang, Z. Wu // The International Journal of Advanced Manufacturing Technology. –2006. – vol. 28. – рр. 930–935. – DOI: 10.1007/s00170-004-1884-2 (accessed: 11.08.2021). – Text: electronic.
5. Feedrate optimization for freeform milling considering constraints from the feed drive system and process mechanics / K. Erkorkmaz, S.E. Layegh, I. Lazoglu, H. Erdim // CIRP Annals - Manufacturing Technology. – 2003. – vol. 62. – pp. 395–398. – DOI: 10.1016/j.cirp.2013.03.084 (accessed: 11.08.2021). – Text: electronic.
2. Абдуллин Т Х Алгоритм опережающего просмотра для системы ЧПУ с применением трапецеидаль ных законов разгона/торможения / Т Х Абдуллин, М А Харьков // XXIX Международная конференция «Ма шиноведение и инновации Конференция молодых учёных и студентов»: труды, 2017. – С. 256–259. – Текст: непосредственный
References
3. Hu, J., Xiao, L., Wang, Y. and Wu, Z., 2006. An optimal feedrate model and solution algorithm for a highspeed machine of small line blocks with look-ahead. The International Journal of Advanced Manufacturing Technology, 28, рр.930–935. DOI: 10.1007/s00170-004-1884-2.
2007. vol. 47. – no. 15. – pp. 2246–2262. – DOI: 10.1016/j.ijmachtools.2007.06.005 (accessed: 11.08.2021). – Text: electronic.11.Smooth feedrate planning for continuous short line tool path with contour error constraint / Jingchuan Dong, Taiyong Wang, Bo Li, Yanyu Ding // International Journal of Machine Tools and Manufacture. – 2014. vol. 76. – pp. 1–12. – DOI: 10.1016/j.ijmachtools.2013.09.009 (accessed: 11.08.2021). – Text: electronic.
1. Xu Du, Jie Huang and Li-Min Zhu, 2015. A complete S-shape feed rate scheduling approach for NURBS interpolator. Journal of Computational Design and Engineering, 2(4), pp.206–217. DOI: 10.1016/j.jcde.2015.06.004.
4. Wen-Bin Zhong et al., 2020. Toolpath Interpolation and Smoothing for Computer Numerical Control Machining of Freeform Surfaces: A Review. International Journal of Automation and Computing, 17, pp.1-16. DOI: 10.1007/s11633-019-1190-y.5.Erkorkmaz,K.,Layegh, S.E., Lazoglu, I. and Erdim, H., 2003. Feedrate optimization for freeform milling considering constraints from the feed drive system and process mechanics. CIRP Annals - Manufacturing Technology, 62, pp.395–398. DOI: 10.1016/j.cirp.2013.03.084.
10. Ming-Tzong Lin, Meng-Shiun Tsai and Hong-TzongYau, 2007. Development of a dynamics-based NURBS interpolator with real-time look-ahead algorithm. International Journal of Machine Tools and Manufacture, 47(15), pp.2246–2262. DOI: 10.1016/j.ijmachtools.2007.06.005.
11. Jingchuan Dong, Taiyong Wang, Bo Li and Yanyu Ding, 2014. Smooth feedrate planning for continuous short line tool path with contour error constraint. International Journal of Machine Tools and. Manufacture, 76, pp.1–12. DOI:12.10.1016/j.ijmachtools.2013.09.009.Zhao,H.,Zhu,L.M.andDing,H., 2013. A real-time look-ahead interpolation methodology with curvaturecontinuous B-spline transition scheme for CNC machining of short line segments. International Journal of Machine Tools and Manufacture, 65, pp.88–98. DOI: 10.1016/j.ijmachtools.2012.10.005.
14. An optimized feedrate scheduling method for CNC machining with round-off error compensation / Hepeng Ni, Tianliang Hu, Chengrui Zhang [et al] // The International Journal of Advanced Manufacturing Technology. – 2018. –vol. 97. – pp. 2369–2381. – DOI: 10.1007/s00170-018-1986-x (accessed: 11.08.2021). – Text: electronic.
12. Zhao H. A real-time look-ahead interpolation methodology with curvature-continuous B-spline transition scheme for CNC machining of short line segments / H. Zhao, L.M. Zhu, H. Ding // International Journal of Machine Tools and Manufacture. – 2013. vol. 65. – pp. 88–98. – DOI: 10.1016/j.ijmachtools.2012.10.005 (accessed: 11.08.2021). – Text: electronic.
13. Высокопроизводительная цифровая система на основе ПЛИС для управления движением многокоор динатных станков и промышленных роботов / А А Зеленский, Т Х Абдуллин, Ю В Илюхин, М А Харьков // «СТИН». – 2019. – № 8. – С. 5–8. – Текст: непосредственный
Информационное обеспечение / Information Support 194
2. Abdullin, T.H. and Har'kov, M.A., 2017. Algoritm operezhajushhego prosmotra dlja sistemy ChPU s primeneniem trapeceidal'nyh zakonov razgona/tormozhenija [Look-ahead algorithm for the CNC system using trapezoidal acceleration / deceleration laws]. In: XXIX Mezhdunarodnaja konferencija «Mashinovedenie i innovacii. Konferencija molodyh uchjonyh i studentov»: trudy [Proceedings of XXIX International Conference «Machine Science and Innovation. Conference of Young Scientists and Students»], pp.256–259. (in Russian).
6. Dong, J.Y., Ferreira, P.M. and Stori, J.A., 2007. Feed-rate optimization with jerk constraints for generating minimum-time trajectories. International Journal of Machine Tools and Manufacture, 47(12-13), pp.1941–1955. DOI: 10.1016/j.ijmachtools.2007.03.006.7.Sencer,B.,Altintas,Y.and Croft, E., 2008. Feed optimization for five-axis CNC machine tools with drive constraints. International Journal of Machine Tools and Manufacture, 48(12–13), pp.733–745. DOI: 10.1016/j.ijmachtools.2008.01.002.8.Beudaert,X.,Lavernhe,S.and Tournier, C., 2012. Feedrate interpolation with axis jerk constraints on 5-axis NURBS and G1 tool path. International Journal of Machine Tools and Manufacture, 57, pp.73–82. DOI: 10.1016/j.ijmachtools.2012.02.005.9.Sung-HoNamandMin-Yang Yang, 2004. A study on a generalized parametric interpolator with real-time jerklimited acceleration. Computer-Aided Design, 36(1), pp.27–36. DOI: 10.1016/S0010-4485(03)00066-6.
13. Zelenskij, A.A., Abdullin, T.H., Iljuhin, Ju.V. and Har'kov, M.A., 2019. Vysokoproizvoditel'naja cifrovaja sistema na osnove PLIS dlja upravlenija dvizheniem mnogokoordinatnyh stankov i promyshlennyh robotov [High-performance
ий производс пер., д
motion control optimized Journal 12

об авторах льное госуда рственный те фективных те com«СТАНКИН» 55, ГСП-4, У «СТАНКИН 4, Москва, Вад out
machining
онно управля граммы Она ых полей, с ых катушек боте миниат урнала Advan «Хайтек») 2021;
ны
Russia, e
Russia, d удут управ Новые м раза быстре ваются из « медузы, а та сортировать По слова размером п для экспеди недоступны ся, что дел медицины Операто роботов с по и направле стемой элек Подробн описаны в с (По матери BERNETICS s and industria od for CNC m ng Technolog рственное б ехнологическ ехнологий и , лаборатори Москва, », лаборатор дковский пер rs her Education f High Perform 5, Russia, zele lectronic Mod deverestultimatectronicModtnt1121@gm вляться ма иниатюрные ее аналогов «мягких» мат акже способн ь миниатюрны ам команды римерно с р иций в замкн для сущест лает их особ р дистанцио омощью прог ние магнитн ктромагнитны ости о раб татье для жу алам сайта
иверситета зработала ыми можно ля выпол ий В био атериалы, итные мик а выполне магнитных TECHNICAL CYB 5machine
97, pp.2 бюджетное о кий университ обработки, ия технологи Вадковский рия
ий производс na21@gmail.comteTechnologologiesandPail.comonTechnologonTechnolog и полями U двигаются в они изготав ни плавают, ать, размещат атюрные робо но использую анства, котор отов Отмеча ными в обла яет движения регулирует с оздаваемых юрных робо ced Materials 9(3) ring rrorOI: ное Н 55,» тва 1, ства ies,ies,icalro-43 ли как ь и ты тся ые ет сти ми илу си тов
m
o И лександрови ания «Москов Н»), кафедр р., д. 1, zelens вич, ФГБОУ дущий инже рович, ФГБО й инженер,
ROBOTICS multi-axis feedrate sch of Advanced

азмера бу tools
al robots]. Rus wit gy, технологи NTU того, – о захватыва ые объекты. NTU, миниа рисовое зерн нутые простр твующих робо бенно полезн
Информация ич, Федерал вский госуда а высокоэфф skyaa@gmail ВО «МГТУ енер, 12705 ОУ ВО «МГТУ 27055, ГСП 4 ormation abo ducational wweSTANKIN»),InstDr.,Moscow,GSTANKIN»,la,GSP-4,127STANKIN»,lab,GSP-4,127
РОБОТ FPGA Resea 10.10comp14e Зе учреж (ФГБО ГСП 4 Аб элект evere Ал элект Al Univecessin Ta Leadi An Leadi Инф Гр Нанья робот управ нения совме безвр рочас ние о полей ТОТЕХНИКА и Т A-based digita arch, 8, pp.5–4. Hepeng Ni ensation. 07/s00170-01Th еленский Ал ждение высш ОУ ВО «МГТ 4, Москва, Ва бдуллин Таг тронных мо stultimate@ya лепко Андре тронных моду lexander A. Z ersity «STANK ng, Assistant P agir Kh. Abdu ng Engineer, ndrei V. Alep ng Engineer, формация Роботы руппа ученых ян в Сингап тов миллиме влять с помо я маневренн естимые пол редные для ч стицы Робот определенных й ЕХНИЧЕСКАЯ К l system for m 8. (in Russian et al., 2018. e8-1986-x.Internation ександр Ал его образова У «СТАНКИ дковский пер ир Хабибов дулей, вед ndex.ru й Владимир лей, ведущи elensky, Fed IN»rofessor,(FGBOU1,V llin, FGBOU 1, Vadkovsky ko, FGBOU 1, Vadkovsky миллиме из Технолог уре (NTU S трового разм щью магнитн ых и ловких имеры – нет еловека, вст ы запрограмм функций пр КИБЕРНЕТИКА /
териалов
al

трового
р., д. 1, mdemance«Moscowdtnt11StaTechnnskyaa@gmulesProductite@yandex.ruulesProductioail.com агнитными роботы
гического уни
th round-off e 2369–2381. D образователь тет «СТАНКИ доцент, 1270
and 195 of
deral State Ed VO «MST «S Vadkovsky pe VO «MST «S per., Moscow VO «MST «S per., Moscow р ingapore)
hedulingManufacturimethn the author titution of High Department o GSP-4, 127055 aboratory of E 055, boratory of El 055,





Кроме
n).An
раз мера, которы ных полей дл манипуляци токсичные ма троены магни мированы на ри действии м
Info
ssian Enginee
k.krestovnikov@iias.spb.su
Konstantin D. Krestovnikov N. Bykov, Aleksei A. Erashov Petersburg Federal Research Center of the Russian of Sciences, Laboratory of Autonomous Robotic Systems, Saint Petersburg, Russia,
Saint
Structure and circuit solution of a wireless power transfer system for application in mobile robotic systems
, А leksandr
Информационное обеспечение / Information Support 196 УДК: 621.3.05 DOI: 10.31776/RTCJ.9305 C. 196-206 Структура и схемотехническое решение системы беспроводной передачи энергии для применения в мобильных РТК К . Д . Крестовников , А . Н . Быков , А . А . Ерашов Санкт Петербургский Федеральный исследовательский центр Российской академии наук ( СПБ ФИЦ РАН ), Лаборатория Автономных Робототехнических Систем , Санкт Петербург , Россия , k.krestovnikov@iias.spb.su ( Материал поступил в редакцию 14 января 2021 года ) Аннотация В данной работе описывается разработка беспроводной системы передачи энергии средней мощности для применения в робототехнике и иных приложениях Представленная система может использоваться для пита ния устройств или заряда аккумуляторных батарей Работа системы основана на принципе индуктивной пе редачи энергии Особенностью системы является использование резонансного автогенератора, для которого передающий LC контур системы является частотозадающим Использование идентичных приемного и пере дающего резонансных контуров позволяет отказаться от дополнительных систем подстройки частоты в при емной части системы Представленное схемотехническое решение БСПЭ позволяет поддерживать работу в режиме резонанса в приемном и передающем контуре при различных взаимных положениях приемной и пе редающей катушек, не требуя для этого отдельную систему контроля и управления Экспериментальная про верка предложенного решения проведена на прототипе системы с экранирующими магнитные поля корпус ными элементами, при этом максимальный уровень эффективности работы системы без выходного стабили затора в приемной части составил 80,41%, при передаваемой мощности 131,5 Вт, на расстоянии передачи 15 мм Получены графики зависимости эффективности и передаваемой мощности для трех расстояний переда чи энергии – 0 мм, 15 мм и 30 мм При расстоянии между катушками до 30 мм, эффективность работы систе мы выше 70% при передаваемой мощности более 55 Вт Ключевые слова Беспроводная зарядная система, беспроводная передача энергии, резонансный автогенератор, эффектив ность беспроводной передачи энергии Благодарности Исследования выполнены при поддержке Российского фонда фундаментальных исследований: РФФИ 19-0801215_А.
(Received 14 January 2021)
Acad emy
Abstract
This paper presents the development of a medium-power wireless power transmission system for use in robotics and other applications. The presented system can be used to power devices or charge batteries. The system is based on the principle of inductive power transmission. A feature of the system is the use of a resonant self-oscillator, for which the transmitting LC circuit of the system is a frequency setting. The use of identical receiving and transmitting resonant circuits makes it possible to refuse additional frequency control devices in the receiving part of the system. The presented circuitry solution of the wireless power transmission system ensures operation in the resonance mode in the receiving and transmitting circuits, where the receiving and transmitting coils are at various positions relative each other, while not requiring a dedicated monitoring and control system for this. Experimental verification of the proposed solution was carried out on a prototype of a system with shell elements, shielding from magnetic fields, while the maximum level of effi-
требуют вмешательства человека в процесс эксплуатации робототехнической системы, что накладывает неко торые ограничения Если робот эксплуатируется в агрессивной среде или на открытом воздухе, то тре буется применение дополнительных мер по защите разъемов и контактных пар от загрязнения и попада ния влаги Применение БСПЭ в качестве зарядного устройства для мобильных автономных робототех нических систем (АРС) позволит избежать перечис ленных недостатков, повысить автономность и упро стить процесс позиционирования для подключения к источнику питания Так как мобильные АРC с мощ ностью до 1 кВт являются наиболее распространен ными [10], актуальной будет разработка БСПЭ сред ней мощности (от 10 Вт до 1 кВт). Данная БСПЭ должна удовлетворять следующим требованиям: вне зависимости от взаимного расположения приемной и передающей частей системы работать в резонанс ном режиме с высокими показателями эффективно сти и передаваемой мощности, иметь экранирование магнитных полей Наиболее распространенные БСПЭ, основаны на принципе передачи энергии
А Введение Технология беспроводной передачи энергии име ет широкие возможности применения Мобильная электроника [1] и электротранспорт [2] являются направлениями, где в настоящее время активно внедряются беспроводные
влияния воздушного зазора на пере дачу энергии решается [13] путем добавления в структуру БСПЭ пластин из электромагнитного ме таматериала Пластины размещены перед печатны ми катушками системы и за счет использования свойства высокой диэлектрической проницаемости позволяют повысить эффективность работы БСПЭ и максимально возможное расстояние передачи энер гии При расстоянии между приемной и передающей частями 30 мм эффективность работы системы –60,8%. Система работает на частоте 472,6 МГц, диа метр передающей и приемной катушек 36 мм Для достижения максимальной эффективности и требуемой зарядной мощности при зазоре в несколь ко сантиметров авторы БСПЭ для транспортных
ciency of the system without an output stabilizer in the receiving part was 80.41%, with a transmitted power of 131.5 W, at a transmission distance of 15 mm. The dependency curves of the efficiency and the transmitted power were obtained for three distances of energy transfer — 0 mm, 15 mm and 30 mm. With distances between the coils up to 30 mm, the efficiency of the system is above 70% with a transmitted power of more than 55 W.
Wireless charging system, wireless power transmission, resonant oscillator, wireless power transmission efficiency.
This research is supported by the RFBR, project no.19-08-01215_ системы передачи энер гии (БСПЭ). Системы малой мощности, применяе мые для мобильной электроники, имеют общеприня тые стандарты и представлены на рынке компания ми Qi, PMA и A4WP. Системы высокой мощности для заряда аккумуляторов электротранспорта внедряют ся не так активно, как системы для мобильной элек троники ввиду наличия большого количества ограни чений Однако из работ [3], [4], [5] можно сделать вывод, что данное направление разработки БСПЭ достаточно хорошо освещено и активно исследуется Еще одним развивающимся направлением, в кото ром возможно получить значительные преимущества при использовании для заряда аккумуляторов си стемы БСПЭ является автономная робототехника В процессе работы автономным робототехническим системам [6], [7], [8] с определенной периодичностью необходимо пополнять запасы энергии аккумулятор ной батареи [9]. Традиционными решениями данной задачи являются различные варианты проводных и контактных методов передачи энергии Обе группы методов подразумевают наличие соединительных разъемов или контактных пар и зачастую между индуктивно свя занными элементами. Как правило, на эффектив ность передачи энергии влияют осевые и угловые смещения частей системы относительно друг друга, величина воздушного зазора между ними, изменения рабочей частоты системы Для уменьшения влияния перечисленных факторов в структуру БСПЭ могут быть внесены изменения путем добавления каких либо дополнительных частей Также к данным си стемам, используемым в робототехнике, в некоторых случаях предъявляются специфические требования, такие как небольшие размеры передающей, прием ной или обеих частей системы при сохранении высо кой эффективности работы Так, например, для пе редачи энергии устройствам, имплантируемым в жи вую ткань (кардиостимуляторы и другие импланты), авторами [11], [12] выполнены БСПЭ на основе мик рополосковых антенн Структура предложенной си стемы [11] включает в себя две антенны: передаю щую внешнюю и приемную, имплантируемую в ткань Приемная антенна имеет форму квадрата со сторо нами 10 мм Реальная эффективность передачи энергии предлагаемой системы БСПЭ небольшая и составляет 1,8%, моделируемая эффективность –2,12%. Система работает в диапазоне 2,40–2,48 ГГц Проблема
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 197
Acknowledgements
Key words
Информационное обеспечение / Information Support 198 средств (ТС) [14] применяют систему управления вто ричным напряжением, расположенную на стороне ТС В данной БСПЭ используется топология последова тельного резонансного контура Система включает в себя наземный источник питания, передающую ка тушку и расположенные на стороне ТС приемную ка тушку, выпрямитель, DC-DC преобразователь посто янного тока и аккумулятор Эффективность передачи энергии определяется параметрами катушки, сопро тивлением и резонансной частотой нагрузки Решение проблемы влияния кратковременных смещений на эффективность передачи энергии до стигается использованием суперконденсатора или аккумуляторной батареи в приемной части системы [15]. Передающая часть БСПЭ представляет собой две коаксиальные прямоугольные последовательно соединенные обмотки и настраивается на рабочую частоту путем изменения одной из емкостей системы (С1). Приемная катушка имеет диаметр 11,45 мм Рабочая частота системы 6,78 МГц, передаваемая мощность – 100 мВт Благодаря данному решению, поддержка мощности нагрузки при сильном осевом и угловом смещении может осуществляться в течении 5 секунд Для устранения возникновения осевых смещений катушек авторы [16] предлагают использовать меха нические устройства позиционирования роботов, на которых установлена данная БСПЭ Система состоит из приемной и передающей катушек, полномостового инвертора, мостового выпрямителя Зазор между ка тушками системы размером 200 × 200 мм составляет 60 мм Резонансная частота составляет 81,6 кГц В целях выявления наибольшей эффективности работы БСПЭ авторы проводят эмпирическое сравнение двух топологий компенсации реактивной мощности: парал лельной (LCC-P) и последовательной (SS). Обнару жено, что пиковая эффективность топологии LCC-P на 1% больше, чем у топологии компенсации SS, из за более низких потерь проводимости инвертора Мак симальная эффективность работы системы около 95% при передаваемой мощности 1400 Вт Разработка беспроводной системы зарядки EDLC-конденсатора (ионистора), предназначенного для питания гибридного велосипеда, представлена в работе [17]. Передающая часть системы представ ляет собой параллельный резонансный контур, под ключенный к генератору переменного тока с рабочей частотой 2,3 МГц Приемная часть представлена не управляемым выпрямителем и DC-DC преобразова телем Экспериментальные результаты были полу чены при следующих параметрах: расстояние пере дачи энергии 50 мм, передаваемая мощность 100 Вт, сопротивление нагрузки 50 Ом, внешний диаметр передающей и приемной катушек 200 мм Эффек тивность системы с параллельным резонансным контуром на частоте передачи энергии 1,1 МГц со ставила 72-73%. Для системы с последовательным резонансным контуром эффективность передачи энергии достигала 70% на частоте 2,3 МГц Для ана логичных целей в статье [18] разработана БСПЭ с передаваемой мощностью 96 Вт и коэффициентом полезного действия системы 79%. Процесс заряда нескольких портативных устройств при наличии осевых смещений предлагается осу ществлять [19], используя БСПЭ специальной формы, предающая часть которой представляет собой чашу с расположенными на внутренней поверхности пятью передающими катушками Расстояние между верхни ми краями чаши – 200 мм, глубина чаши – 80 мм Та кая структура обуславливает равномерное распреде ление магнитного поля внутри катушки Система ра ботает на частоте 6,78 МГц Эффективность работы при минимальном расстоянии и смещении между при емной и передающей частями системы составляет 8595%, в процессе заряда смартфона эффективность колеблется в диапазоне 68-80% при передаваемой мощности от 2,5 до 5 Вт для любого размещения за ряжаемого устройства внутри сферы Подобно описанной выше системе БСПЭ, пред ставленная в роботе, [20] передает энергию несколь ким устройствам Система включает в себя резо нансные конденсаторы, передающую катушку Гельм гольца, несколько приемных катушек, двухполупери одный выпрямитель Диаметр передающей катушки, намотанной медным проводом 0,5 мм, составляет 380 мм Для высокой эффективности работы требу ется точное расположение приемных катушек отно сительно катушки Гельмгольца и друг друга Макси мальная эффективность передачи энергии при рабо те с одним приемником – 60,5% при сопротивлении нагрузки 200 Ом Экспериментальные образцы рассмотренных си стем в большинстве случаев построены на основе полумостовых или мостовых инверторов, подразуме вающих отдельную систему управления Основные проблемы БСПЭ, влияющие на эффективность пере дачи энергии – осевые и угловые смещения между частями системы и воздушный зазор между ними, из менение частоты работы при увеличении или умень шении расстояния между приемной и передающей частями Одним из общих недостатков основной части рассмотренных БСПЭ является необходимость регу лирования рабочей частоты в зависимости от взаим ного расположения приемной и передающей частей и величины нагрузки, что требует дополнительных си стем Предлагаемые в рассмотренных работах реше ния заключаются в добавлении дополнительных ча стей в структуру БСПЭ, поддерживающих магнитную связь между катушками и требуемую частоту работы системы Например, использование суперконденсато ров или аккумуляторов [21] в приемной части систе мы, компенсирующих кратковременное падение пере
(2
части систем ток, индуциров ре, детектируе р напряжения я схема приемно the receiving part ission system

стемы части разра ис. 1, состо

TECHNICAL



мы представл ванный в при ется выпрями питает нагруз ой части БСПЭ
CYB 9
икновении нес ПЭ имеет огр гии Расстоян ргию без знач ть [22] путем тин из метам стин с емкос ы не являютс истем экранир ть нежелател тройств ется структура ости, основно ор, позволяю иемном и пер эффективност ного располож
передающей
еля приемно няется предл ль. Изменени и приемной а величину Э ке Исходя и можно вывес апряжения п ачение тока тся исходя из ременного на му контуру, f 2021;
ROBOTICS and
of wireless powe й части систе ложенный в ие во взаимн частей систе ЭДС, индуцир из соотношен ти формулу д приемной ча в резонансн (2): апряжения, п f – рабочая зу от за ди ра ти, ав ена ем те ку мы ий,
пер резонансном без


а и схемо ой частью ющий под редающем ти работы жения аботанной ит из не системы he system зонансный ествляется рез индук ные конту является Резонанс считывает (1) деального ие нагруз L и С –тура соот ратора, ча ется пере резонанс в уктивности
частоты

ования допол Резонанс в вать максима риемная и пе ные резонансн от дополните иемного конту при измене аимное распо ти устройств вность и добр й и передающ ся частотозад датчик прием оляет добит вности и пере ом расположе ойства й части реали онтроль рабо щиты системы ов работы и в з систему ин
чих

/
тельных сис редающем к ную мощнос дающая час контуры, что ных систем для поддер взаимного р жение прие одинаковой ность резона части, а пер щим, то об находятся наилучших п ваемой мощ приемной и Система ет управлен показателей щности при лю передающей управления ние силовым системы, ал и неноминаль е с пользова мена данным ляются: ток тающего напр ра а приемной еременный то нсном контур стабилизатор 2 — Структурная Block diagram of transmit ве выпрямите аботе примен выпрямител передающей зки влияют на емной катушк ых в [24], возм ыходного на литудное зна рассчитывает
соосности раничение ние, на ко чительных использо материала, стной свя ся готовы рования, и льное вли
параметров перегрузки и имодействи кации и обм метрами явл уровень пит тогенератор Структур на рис. 2. П ном резонан лем и через Рисунок Figure 2 — B В качест в данной ра синхронный положении п и ток нагруз мую в прие приведенны расчета вы БСПЭ Амп контуре р (2 m U l fL где Um – а водимого к BERNETICS й катушки б стем подстро контуре позво сть в приемн ть БСПЭ име о позволяет подстройки жания в нем расположения мной и пере мере влияют ансных конту редающий кон а контура си в резонансе
КИБЕРНЕТИКА

er
редающей части smitting part of th является рез ергии осуще ндукции чер ые резонансн вою очередь генератора контура расс ая частота ид сопротивлени ому контуру, нансного конт ого автогенер торого являе ддерживать р менении инду
ируемыми па я силовой час стота работы

9(3) ни пе ль ре ые ль ра, нии ло а в от ей аю ник ься да нии
ля сти ом ) од ча
199
РОБОТ давае Кажда по ра торое потер вания допол зью Р ми ус следо яние н В техни котор держи конту систе Струк Ст БСПЭ сколь Рис Fig Ос автог метод тивно ры Р часто ная ч ся по r где 0 конту ки, пр индук ветст Ис стото дающ перед ТОТЕХНИКА и Т емой мощнос ая из рассмо асстоянию пе е можно пере рь, предлагае я в структуре лнительных к Рассмотренн стройствами и овательно, мо на работу окр данной рабо ика БСПЭ ср ой является ивающий рез ре и снизить емы при измен ктура разраб труктура пе Э, представл ьких основных сунок 1 — Структ gure 1 — Block dia сновной част енератор П дом электро о связанные Резонансный отозадающим астота r ре формуле (1) 0 02 1 1 4 C 1/ LC ура, эR – экв риложенной ктивность и е венно спользование озадающим к щий контур, по дающем конт ЕХНИЧЕСКАЯ К ти при возни тренных БСП редачи энерг давать энер тся увеличит БСПЭ пласт атушек, плас ые прототипы не имеют си гут оказыват ужающих уст те предлагае едней мощно автогенерат онанс в при падение э ении взаимн отанной сис редающей енная на ри блоков урная схема пер gram of the trans ью системы ередача эне магнитной и параллельны контур в св и для автог ального LC : 22 эR , резонансна ивалентное к резонансно мкость резон резонансно онтуром кот зволяет под уре при изм
)22 m con U L R , мплитуда использо ойки частоты оляет переда ную часть. Пр еют идентичн избавиться о при м резонанса я Так как вза едающей час т на индуктив уров приемно нтур являетс истемы перед е Это позв по эффектив юбом взаимно частей устро передающей м блоком, ко лгоритмы защ ьных режимо ателем через ми Контроли потребления ряжения, час
[23] ом мы уе


связи меж Исход теля мож ходимого варианта DC прео SEPIC ил женной с схемотех Схемотех решения Силов ленный Принц Пос «START» стор R6 н зистора V питается формирую Далее че рах VT5 напряжен генератор транзисто (наприме проводить VT5 и отк VT2 и уде блока e transmitting par
жду приемной дя из (4) и (5 жет быть выш для питани ми стабилиз образователи пере . 3, сост его запус работы или ниже ия нагрузки. аторов напря , выполненн OST. В соотв для БСПЭ б шение, предст конструктив едающей част оит из резона ска и контроля разработанно ысокого уровн VT4 открывае ь ток в цепи б ая его Чере стабилизатор жение для за ные повторит ираемых токо т на затворы у динамическ ько отличают рывается бы ом через дио 7, разряжая з закрытом сос
р ле подачи вы транзистор V начинает течь VT3, открыва линейный с ющий напряж ерез эмиттерн и VT6, отпи ние поступает ра Поскольку оров несколь р, VT1) откр ь ток, при эт крывается VT ерживая его в передающей час rt of wireless pow й и передающ 5), напряжени ше



















wer transmission s




прями необ чшими ут DCологии редло ботано алее едстав енера стоты ледую о цепи з рези р тран р VT3, я IC6, и VT2. нзисто 8, R11 оввто истики из них чинает вается истора
пями
щий
я у т й у ю т
цип
нитного поля остью между й частью от стью потреб к приемной связи между (5) очника пита ющей частью коэффициент пиальная схема e power unit of th е з
сти БСПЭ
щей катушкам ие после вып напряжения Поэтому луч ряжения буду ные по топо ветствии с пр было разраб тавленное да вные ти БСПЭ, пре ансного автог я рабочей час ой схемы сл ня сигнала по ется, и через база эмиттер ез транзистор р напряжения атворов VT1 и тели на тран ом через R8 ы транзистор кие характер тся, один и ыстрее и нач од D1 закрыв затвор транзи стоянии system
а рис
силового
на тора с цеп
ми
ое сопротив ая в контур т быть пред (3)




ли BUCK-BOO структурой д ническое реш хнические и БСПЭ вой блок
200



Инф сто лен ной ста Pm сти нап уче ра Ul в п мо вто ляе час рез ' Pm где ния от формационное о ота контурной ние проводни Энергия ма й катушке за авлена следу 2 2 ⎛⎞ ⎜⎟ ⎝⎠ Im Lf Выполнив за ив выражени пряжения на ета потерь м и выпрямите '2(8 Pm f L В этом случ приемном кон щностью пот оричного исто емой нагрузк сти системы зонансными к истсвистUkI е истU – нап я, истI – ток вторичного и Fi обеспечение / In й катушки, R ика катушки гнитного пол единицу вре ующим образо амену lm в ( ие, получим выходе прие мощности на еля (4): 2222) Lcon R Lf ае ' Pm – это нтуре ' Pm яв требляемой очника питан кой – Pl , по с учетом коэ контурами т l P , пряжение вто к, потребляем источника пит Рису igure 3 — Schema formation Supp Rcon – активно я, запасаема мени, может м 3),: преобраз действующе мной части элементах а энергия магн ляется разно передающей ия и мощнос дключенной ффициента ричного исто ый передаю ания, свk – к нок 3 — Принци tic diagram of the port
овав и упро ее значение системы без втогенерато (4)
ные
лись
Um
щей
передач требления п части систем энергии явля стояний от получения х ближенны к плуатации в комплексов рых сведены тотипа БСПЭ Из табл ность перед сти нагрузк 134,76 Вт яв вторичного и Большее расстоянии системы рав индуцирован снижается в шается мощ ток нагрузки вторичного и 9 А являет дальнейшее нию доброт согласованн что ведет к руемой в пр мощности на BERNETICS модель передаю model of the transms БСПЭ изготов екла и ABS п используетс ых полей пер мы Катушка р щена от внеш шние габаритн редающей ча ой
исток
20

ипе
Эксперимен В
агрузки б
ют си
а)
КИБЕРНЕТИКА /
иемном
чи
через
е

(6) втогенера ка. Так как пряжения, держивает аничивает еключения тся выби 24 L За апряжении контурной коммута ONTROL», для пред БСПЭ виде , диа
ROBOTICS and






ототипа БСП ентов фиксиро бления перед дное напряже емы – 2U и ля трех расст ры мощности ы 1P и прием вности перед р диапазона р необходимос торые будут п ных условиях обототехничес лицы 1-3, в ко работанного п абилизатора льная эффект 18% при мощ емая мощно я используем ющей части актеристики риемной частя снижением Э вследствие ч стемы и уме оляет увелич ие по мощно с током нагру ристике, так и ведет
нтальные
ЕХНИЧЕСКАЯ
тавленный ав вертором ток источника на оторый подд уровне и огра период пере 7] предлагает дросселя 1 L ходит при на когда ток в воляет свести Цепь «FR_CO Z5 и R5, треб ия частоты р леживать и и ы автогенера ботоспособно а на прототи нтур выполне шки c 11 витк литцендрат индуктивност нтурных емко общей емко дающей част
ложен Перед плоск метро 4,5 м ляет меняю µF М пр
ками
Корпус Б Д16т, оргсте евый сплав тромагнитны тура систем та и защищ Внеш пер , приемно процес напряж части си нагруз Данные пара ний – 174×174× ис проведени питания истемы – 1U приемной аметры были энергии –ередающей ч мы 2P , а так яются расчет 0 до 30 мм арактеристик характеристи в составе мо Ниже предст ы рабочие пар Э без выходно 1 следует, ч ачи энергии д ки 128,33 Вт вляется макси источника пит е количество между перед вном 15 мм о нной в приемн выходное нап нагруз не превыси пит последней увеличение ности резона ость нагрузки значительном резо ) (а) и приемно mitting (a) and rec system
буется
сечением ти состав остей при остью 0,94 тей систе TECHNICAL CYB 1


ющей
ктуре предст тактным инв ляется от и ель 1L , ко остоянном у о тока в п ючей В [27 ь входного д оров происх му к нулю, ен Это позв минимуму Ц ементами DZ й управлени зволяет отсл льной работы роверка раб й проведена нансный кон идной катуш из провода е значение качестве кон денсаторы с мной и пере на рис. 4.
и ток
ен в
шке
влен из дюра пластика Лис ся для экран редающего ре резонансного шних механи ные размеры асти составля ×22 мм
рактическая
работы ге исключать атора ости
5], [26]: истU о своей стру вляется двух ние осуществ ходим дросс ной ток на п ки питающег зисторных кл индуктивност ние
жение
спытания про ия экспериме я и ток потреб и 1I , и выход й части систе и получены дл l Параметр части системы кже эффектив тными Выбор обусловлен системы, кот икам в реальн обильных ро тавлены табл раметры разр ого DC-DC ста что максимал достигает 80, т Передава имальной дл тания переда о точек хара дающей и пр обусловлено с ной катушке, пряжение си зки, что позво ив ограничени тания Точка й в характер тока нагрузки ансного конту и с приемной му уменьшен онансном конт
зки
к сни ура, и ухудш й частью БС ию ЭДС инду туре и снижен 9(3) емы f the рки ни ек он ры ей ого ×22 Э ва аю ние 2I оя по ной ачи ас тью ри экс ких то ро ив но сть ого при ми ДС, его нь ить сти зки как же ает ПЭ, ци ию
ся
стоке закры т, а затем ( ем дросселе В этот мом разряжается, VT1 теперь з ительный по ается через ельно разряж Через полови последоват я В контуре т е автоколеба
а
тора
К
ся
щность
по мы
апряжение на ала возрастае сглаживающ нуль. зистора VT1 Так как ляется полож VT2 заряж окончат зистора VT1. ся в обратной VT1 откроетс инусоидальны транзист близко максимал потери к системо Это неномина п решени дающий резо кой спиралев ом 135 мм м 2 Расчетно 11,8 мкГн В ются MPP кон Модели прие редставлены
транз
корпуса
и
нных
мм
и
ТОТЕХНИКА и Т
ытого транзис с ограничени е L1) понижае мент затвор и транзисто заперт, то на отенциал Зат VT5. VT2 отк
мы
источника
изованная эл роля
ствий
ра
По
ется
этом
ссе
РОБОТ
Рисунок 4 — 3D Figure 4 — 3D m

рать пиран сток и катуш ционн реали контр нерат режим Пр
стора VT2 ием роста ется, пере открытого ор VT1 за а его стоке твор тран крывается, VT8 затвор все повто T2 закроет м возника итудой Um
снача тока в
алюминия ма стовой алюми нирования эл езонансного к о контура зак ических возд разработанн яют 220×174
2021; ой (б) частей сист ceiving (б) parts o
На
жая через V ину периода в ельности: VT таким образо ания с ампли
ходя транз пирае появл зисто при э транз ряетс , V (6) [25
тор я питан необх входн броск
Рабочие парам perating paramete , А
Инф но наг за наг сис ног пер формационное о U1, В 18,0018,7218,8719,0619,2319,4019,63 U1, В 18,6018,6718,7818,9519,1119,3019,4919,67 U1, В 19,3019,5019,66 Из графиков сделать сле грузки снижа счет потоко грузки, что в стемы; высок го зазора пр редаваемую обеспечение / In I1, А 9,408,597,145,654,212,721,28 I1, А 9,068,808,136,905,604,192,811,40 I1, А 4,182,851,53 РисунокFigur5e в, представле едующие выв ется отноше ов рассеяния выражается кое магнитное ри 30l мм мощность formation Supp Таблица 1 Table 1 — O U2, В 16,1217,1117,5518,1018,5719,1219,64 Таблица 2 Table 2 — Op U2, В 14,9415,4716,1016,9017,6518,3919,0019,55 Таблица 3 Table 3 — Op U2, В 18,0018,8619,52 — Зависимость 5 — The depend нных на рис оды: с росто ние мощност к полезно в росте эф сопротивле снижает ма в 2 раза о port Рабочие парам perating paramete I2, А 8,367,506,004,503,001,500,00 Рабочие парам perating paramete I2, А 9,008,507,506,004,503,001,500,00










I2


3,001,500,00 эффективности ency of the efficie с. 5, возмож ом мощности ти, теряемой ой мощности фективности ение воздуш аксимальную относительно 202 метры прототипа ers of the prototy P1, Вт 168,4160,0133,9106,980,2052,0124,373744 метры прототипа ers of the prototyp P1, Вт 167,7163,5151,9130,0106,280,1154,0126,7860246 метры прототипа ers of the prototyp P1, Вт 79,9154,8229,32 и от передаваемо ency on the transm и й и и ю о мощности между пр При 0l ности сис более 12 мощности контуров, потерь на а при 0l мм pe at 0l mm P2, Вт 55,7128,60,008 3 81,45 7 105,30 4 128,33 4 134,76 при 15l мм pe at 15l mm P2, Вт 55,128,50,0007 6 79,43 0 101,40 2 120,75 4 131,50 6 134,46 при 30l мм pe at 30l mm P2, Вт 54,0028,290,00 ой мощности для mitted power for d и нагрузки п риемной и п мм незнач стемы при у 28,33 Вт обу и на активно увеличение а ключах рез т Эффек 58036 m Эффек 3700506 m Эффек различных l different l при минимал передающей ительное сни увеличении м словлено ув ом сопротивл м статически зонансного а ктивность, % 80,0180,1878,6076,1769,4755,150,00 ктивность, % 80,1580,4179,4878,0074,7568,8752,770,00 ктивность, % 67,5751,610,00 льном расст частями сис ижение эфф мощности на величением п лении резона их и динамич автогенерато тоянии стемы фектив агрузки потерь ансных ческих ра пе





7. Development of Multipurpose Mobile Platform with a Modular Structure / N. Pavliuk [et al.] // Proceedings of 14th International Conference on Electromechanics and Robotics «Zavalishin's Readings». – Springer, Singapore, 2020. – Pp. 137-147. DOI: 10.1007/978-981-13-9267-2_12 (accessed: 15.01.2021). – Text: electronic.
4. Controller synthesis of a bidirectional inductive power interface for electric vehicles. / M. J. Neath [et al.] // Proceedings 2012 IEEE Third International Conference on Sustainable Energy Technologies (ICSET). – IEEE, 2012. – Pp. 60-65. DOI: 10.1109/ICSET.2012.6357376 (accessed: 15.01.2021). – Text: electronic.
8. Пшихопов В Х Групповое управление движением мобильных роботов в неопределенной среде с ис пользованием неустойчивых режимов / В Х Пшихопов, М Ю Медведев // Труды СПИИРАН. – 2018. – Т. 5. –№ 60. – С. 39-63. DOI: 10.15622/sp.60.2 (дата обращения: 15.01.2021). – Текст: электронный 9. Бычков И В Двухуровневый эволюционный подход к маршрутизации группы подводных роботов в условиях периодической ротации состава / И В Бычков, М Ю Кензин, Н Н Максимкин // Труды СПИИРАН. –
Литература
представленного решения получены с использованием прототипа си стемы с экранированием магнитных полей, что зна чительно снижает показатели эффективности и пе редаваемой мощности, но в то же время является обязательным условием для совместной эксплуата ции БСПЭ с другими устройствами и мобильными АРС Эффективность работы системы незначитель
2. Чернявская Л Ф Беспроводная зарядка электротранспорта / Л Чернявская, Р В Лобанов // Механи ки XXI веку. – 2011. – №10. – С. 96-99. – Текст: непосредственный
1. Лофицкий И. В. Системы беспроводной . – 2015. – С. 140143. – Текст: непосредственный
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 203 редающей части и синхронного выпрямителя прием ной части системы беспроводной передачи энергии Снижение эффективности системы при передавае мых мощностях менее 50 Вт обусловлено высоким значением магнитного потока рассеяния Магнитный поток рассеяния замыкается не только в воздушном зазоре, но и через экранирующие элементы устрой ства, индуцируя в них вихревые токи и создавая по тери на перемагничивание, что выражается в виде незначительного тепловыделения с их поверхностей. Зависимости на рис. 5 показывают, что эффек тивность разработанной БСПЭ выше 50% при пере даваемой мощности более 28 Вт на расстояниях пе редачи энергии до 30 мм Максимальный уровень эффективности передачи энергии 80,41% достигает ся при передаваемой мощности 131,5 Вт, при рас стоянии передачи 15 мм Заключение Представленное в работе схемотехническое ре шение БСПЭ позволяет поддерживать работу в ре жиме резонанса в приемном и передающем контуре при различных взаимных положениях приемной и передающей катушек, при этом не требуя для этого отдельную систему контроля и управления Изготов ленный прототип имеет эффективность работы и передаваемую мощность, сопоставимую с характе ристиками аналогичных систем, представленных в аналитической части статьи Максимальный уровень
зарядки аккумуляторных батарей для мобильных устройств / И. В Лофицкий, Д И Юркин // Актуальные проблемы радиоэлектроники и телекоммуникаций
3. Madawala U. K. A bidirectional inductive power interface for electric vehicles in V2G systems / U. K. Madawala, D. J. Thrimawithana // IEEE Transactions on Industrial Electronics. – 2011. – Vol. 58. – №. 10. – Pp. 47894796. DOI: 10.1109/TIE.2011.2114312 (accessed: 15.01.2021). – Text: electronic.
эффективности передачи энергии составил 80,41%, а передаваемая мощность – 134,46 Вт В отличие от других систем, все характеристики но падает при изменении расстояния между катуш ками до 30 мм и находится выше 70% при передава емой мощности более 55 Вт Представленное в дан ной работе решение возможно использовать для заряда аккумуляторных батарей различных назем ных мобильных автономных роботов бытового и промышленного назначения, а также для необитае мых подводных роботизированных аппаратов При менение разработанной системы для питания авто номных датчиков может оказать значительное влия ние на развитие киберфизических систем [28], [29]. Дальнейшие исследования будут продолжены в направлении снижения массогабаритных показате лей системы, разработки аппаратного и программно го комплекса системы управления для двустороннего обмена информацией между приемной и передаю щей частями системы через Wi-Fi.
Ф
5. Thrimawithana D. J. A contactless bi-directional power interface for plug-in hybrid vehicles / D. J. Thrimawithana, U. K. Madawala // Proceedings 2009 IEEE Vehicle Power and Propulsion Conference. – IEEE, 2009. – Pp. 396-401. DOI: 10.1109/VPPC.2009.5289820 (accessed: 15.01.2021). – Text: electronic.
6. Formation of Modular Structures with Mobile Autonomous Reconfigurable System / N. Pavliuk [et al.] // Proceedings of 14th International Conference on Electromechanics and Robotics «Zavalishin's Readings». – Springer, Singapore, 2019. – Pp. 383-395. DOI: 10.1007/978-981-13-9267-2_31 (accessed: 15.01.2021). – Text: electronic.
/ Shaw T.,
25. Abdolkhani A. Improved autonomous current-fed push–pull resonant inverter / A. Abdolkhani, A. P. Hu // IET Power Electronics. – 2014. – Vol. 7. – № 8. – Pp. 2103-2110. DOI:10.1049/iet-pel.2013.0749 (accessed: 15.01.2021). – Text: electronic.
17. Itoh J.-I. System design of electric assisted bicycle using EDLCs and wireless charger / J.-I. Itoh, K. Noguchi, K. Orikawa // Proceedings of Power Electronics Conference (IPEC-Hiroshima 2014 – ECCE-ASIA). – 2014 International. – Pp. 2277-2284. DOI: 10.1109/IPEC.2014.6869907 (accessed: 15.01.2021). – Text: electronic.
11. Wireless Power Transfer System Design in Reactive Near-Field for Implantable Devices / T. Shaw [et al.] // 14th European Conference on Antennas and Propagation (EuCAP). – IEEE, 2020. – Pp. 1-5. DOI: 10.23919/EuCAP48036.2020.9135790 (accessed: 15.01.2021). – Text: electronic.
2019. T. 2. . 267-301. DOI:10.15622/sp.18.2.267-301 : 15.01.2021). тронный
С
13. Shaw T. Wireless power transfer system based on magnetic dipole coupling with high permittivity metamaterials Mitra IEEE Antennas and Wireless Propagation Letters. – 2019. – Vol. 18. – №. 9. – Pp. 18231827. DOI: 10.1109/LAWP.2019.2930769 (accessed: 15.01.2021). – Text: electronic. – 2019. – T. 12. – №. 2. – С. 229-233.
18. – №
12. Широков И Б Система беспроводной передачи энергии / И Б Широков, Е И Широкова, А А Азаров // Инфокоммуникационные и радиоэлектронные технологии. – 2019. – Т. 2. – №. 3. – С. 380-389. – Текст: непо средственный
22. Shaw T. Wireless power transfer system based on magnetic dipole coupling with high permittivity metamaterials / T. Shaw, D. Mitra // IEEE Antennas and Wireless Propagation Letters. – 2019. – Vol. 18. – №. 9. – Pp. 18231827. DOI: 10.1109/LAWP.2019.2930769 (accessed: 15.01.2021). – Text: electronic.
D. //
21. Optimal design and experimental assessment of a wireless power transfer system for home-cage monitoring / Jeff Po-Wa Chow [et al.] // IEEE Transactions on Power Electronics. – 2019. – Vol. 34. – №. 10. – Pp. 9779-9793. DOI: 10.1109/TPEL.2019.2894182 (accessed: 15.01.2021). – Text: electronic.
26. Hu A. P. A low cost portable car heater based on a novel current-fed push-pull inverter / A. P. Hu, P. Si // In Australasian Universities Power Engineering Conference. – 2004. – Text: unmediated.
(дата обращения
– Текст: элек
16. An LCC-P compensated wireless power transfer system with a constant current output and reduced receiver size / Z. Yan, Y.Zhang [et al.] // Energies. – 2019. – Т. 12. – №. 1. – P. 172. DOI: 10.3390/en12010172 (accessed: 15.01.2021). – Text: electronic.
Информационное обеспечение / Information Support 204
28. Vatamaniuk I. V. Algorithmic model of a distributed corporate notification system in context of a corporate
23. Krestovnikov K. Concept of a synchronous rectifier for wireless power transfer system / K. Krestovnikov, E. Cherskikh, N. Pavliuk // IEEE EUROCON 18th International Conference on Smart Technologies. – 2019. DOI:10.1109/eurocon.2019.8861856 (accessed: 15.01.2021). – Text: electronic.
– Текст: непосредственный
15. Optimal design and experimental assessment of a wireless power transfer system for home-cage monitoring / J.P.W. Chow [et al.] // IEEE Transactions on Power Electronics. – 2019. – Vol. 34. – №. 10. – Pp. 9779-9793. DOI: 10.1109/TPEL.2019.2894182 (accessed: 15.01.2021). – Text: electronic.
27. Abramovitz A. A novel self-oscillating synchronously-rectified dc-dc converter / A. Abramovitz, Ben Yaakov S. // In PESC '91 Record 22nd Annual IEEE Power Electronics Specialists Conference. – 1991. – Vol. 91. – Pp. 163170. DOI: 10.1109/PESC.1991.162670 (accessed: 15.01.2021). – Text: electronic.
20. Soichiro ITO. An Implementation of Wireless Power Transfer System for Multiple Receivers / Soichiro ITO, Yoshiki TSUCHIDA, Masahiro FUKUI // IEEE International Conference on Consumer Electronics (ICCE). – IEEE, 2019. – Pp. 1-4. DOI: 10.1109/ICCE.2019.8661995 (accessed: 15.01.2021). – Text: electronic.
10. Rubio F. A review of mobile robots: Concepts, methods, theoretical framework, and applications / Rubio F., Valero F., Llopis-Albert C. // International Journal of Advanced Robotic Systems. – 2019. – Vol. 16. – № 2. Pp. 1-22. DOI: 10.11771/1729881419839596 (accessed: 15.01.2021). – Text: electronic.
14. К вопросу о беспроводной системе передачи энергии для электромобилей / О Т Шатманов [и др.] // Международный журнал прикладных и фундаментальных исследований.
18. Experimental test on a Contactless Power Transfer system / F. Pellitteri [et al.] // Proceedings in Ecological Vehicles and Renewable Energies (EVER). – 2014. – Pp. 1-6. DOI: 10.1109/EVER.2014.6844092 (accessed: 15.01.2021). – Text: electronic.
19. Transmitter coils design for free-positioning omnidirectional wireless power transfer system / J. Feng, L. Qiang, F.C. Lee, M. Fu // IEEE Transactions on Industrial Informatics. – 2019. – Vol. 15. – №. 8. – Pp. 4656-4664. DOI: 10.1109/TII.2019.2908217 (accessed: 15.01.2021). – Text: electronic.
24. Krestovnikov K. Approach to choosing of optimal number of turns in planar spiral coils for systems of wireless energy transfer / K. Krestovnikov, E. Cherskikh, A. Bykov // Elektronika ir Elektrotechnika, in press. – Text: unmediated.
–
15. Chow, J.P.W. et al., 2019. Optimal design and experimental assessment of a wireless power transfer system for home-cage monitoring. IEEE Transactions on Power Electronics, 34(10), pp.9779-9793. DOI: 10.1109/TPEL.2019.2894182.16.Yan,Z.etal.,2019.An LCC-P compensated wireless power transfer system with a constant current output and reduced receiver size. Energies, 12(1), pp.172. DOI: 10.3390/en12010172.
7. Pavliuk, N. et al., 2020. Development of Multipurpose Mobile Platform with a Modular Structure. In: Proceedings of 14th International Conference on Electromechanics and Robotics «Zavalishin's Readings», pp.137-147. DOI: 10.1007/978-981-13-9267-2_12.8.Pshikhopov,V.Kh.andMedvedev, M.Yu., 2018. Gruppovoe upravlenie dvizheniem mobil'nykh robotov v neopredelennoy srede s ispol'zovaniem neustoychivykh rezhimov [Group motion control of mobile robots in an uncertain environment using unstable modes]. Trudy SPIIRAN, 5(60), pp.39-63. DOI: 10.15622/sp.60.2. (in Russian).
cyber-physical system / I. V. Vatamaniuk, R. N. Yakovlev // Modeling, optimization and information technology. –2019. – Vol. 7. – № 4. Pp. 386-391. DOI: 10.26102/2310-6018/2019.27.4.026 (accessed: 15.01.2021). – Text: electronic.29.
Vatamaniuk I. V. Generalized Theoretical Models of Cyberphysical Systems / I. V. Vatamaniuk, R. N. Yakovlev // Proceedings of the Southwest State University. – 2019. – Vol. 23. – № 6. Pp. 161-175. DOI: 10.1109/IS48319.2020.9200171 (accessed: 15.01.2021). – Text: electronic.
Formation of Modular Structures with Mobile Autonomous Reconfigurable System. In: Proceedings of 14th International Conference on Electromechanics and Robotics «Zavalishin's Readings», pp. 383395. DOI: 10.1007/978-981-13-9267-2_31.
9. Bychkov, I.V., Kenzin, M.Yu. and Maksimkin, N.N., 2019. Dvukhurovnevyy evolyutsionnyy podkhod k marshrutizatsii gruppy podvodnykh robotov v usloviyakh periodicheskoy rotatsii sostava [Two-level evolutionary approach to routing a group of underwater robots in conditions of periodic rotation of the train]. Trudy SPIIRAN, 18(2), pp.267301. DOI:10.15622/sp.18.2.267-301. (in Russian).
2. Chernyavskaya, L.F. and Lobanov, R.V., 2011. Besprovodnaya zaryadka elektrotransporta [Wireless charging for electric vehicles]. Mekhaniki XXI veku, 10, pp.96-99. (in Russian).
References
10. Rubio, F., Valero, F. and Llopis-Albert, C., 2019. A review of mobile robots: Concepts, methods, theoretical framework, and applications. In: International Journal of Advanced Robotic Systems, 16(2), pp.1-22. DOI: 10.11771/1729881419839596.11.Shaw,T.etal.,2020.Wireless power transfer system design in reactive near-field for implantable devices. In: IEEE 14th European Conference on Antennas and Propagation (EuCAP), pp.1-5. DOI: 10.23919/EuCAP48036.2020.9135790.12.Shirokov,I.B.,Shirokova,E.I.and Azarov, A.A., 2019. Sistema besprovodnoy peredachi energii [Wireless power transmission system]. Infokommunikatsionnye i radioelektronnye tekhnologii, 2(3), pp.380-389. (in Russian).
13. Shaw, T. and Mitra, D., 2019. Wireless power transfer system based on magnetic dipole coupling with high permittivity metamaterials. In: IEEE Antennas and Wireless Propagation Letters, 18(9), pp.1823-1827. DOI: 10.1109/LAWP.2019.2930769.14.Shatmanov,O.T.etal., 2019. K voprosu o besprovodnoy sisteme peredachi energii dlya elektromobiley [On the issue of a wireless power transmission system for electric vehicles]. Mezhdunarodnyy zhurnal prikladnykh i fundamental'nykh issledovaniy, 12(2), pp.229-233. (in Russian).
3. Madawala, U.K. and Thrimawithana, D.J., 2011. A bidirectional inductive power interface for electric vehicles in V2G systems. In: IEEE Transactions on Industrial Electronics, 58(10), pp.4789-4796. DOI: 10.1109/TIE.2011.2114312.4.Neath,M.J.etal.,2012. Controller synthesis of a bidirectional inductive power interface for electric vehicles. In: Proceedings 2012 IEEE Third International Conference on Sustainable Energy Technologies (ICSET), pp.60-65. DOI:5.10.1109/ICSET.2012.6357376.Thrimawithana,D.J.andMadawala, U.K., 2009. A contactless bi-directional power interface for plug-in hybrid vehicles. In: Proceedings 2009 IEEE Vehicle Power and Propulsion Conference, pp.396-401. DOI: 10.1109/VPPC.2009.5289820.6.Pavliuk,N.etal.,2019.
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 205
1. Lofitskiy, I.V. and Yurkin, D.I., 2015. Sistemy besprovodnoy zaryadki akkumulyatornykh batarey dlya mobil'nykh ustroystv [Wireless charging systems for mobile devices]. Aktual'nye problemy radioelektroniki i telekommunikatsiy, pp.140-143. (in Russian).
Информационное обеспечение / Information Support 206
Optimal design and experimental assessment of a wireless power transfer system for home-cage monitoring. IEEE Transactions on Power Electronics, 34(10), pp.9779-9793. DOI: 10.1109/TPEL.2019.2894182.22.Shaw,T.andMitra,D., 2019. Wireless power transfer system based on magnetic dipole coupling with high permittivity metamaterials. IEEE Antennas and Wireless Propagation Letters, 18(9), pp.1823-1827. DOI: 10.1109/LAWP.2019.2930769.23.Krestovnikov,K.,Cherskikh, E. and Pavliuk, N., 2019. Concept of a synchronous rectifier for wireless power transfer system. In: IEEE EUROCON 18th International Conference on Smart Technologies DOI:10.1109/eurocon.2019.8861856.24.Krestovnikov,K.,Cherskikh,E. and Bykov, A., in press. Approach to choosing of optimal number of turns in planar spiral coils for systems of wireless energy transfer. Elektronika ir Elektrotechnika
18. Pellitteri, F. et al., 2014. Experimental test on a Contactless Power Transfer system. In: Proceedings in Ecological Vehicles and Renewable Energies (EVER), pp.1-6. DOI: 10.1109/EVER.2014.6844092.
Information about the authors
Aleksei A. Erashov, Saint Petersburg Federal Research Center of the Russian Academy of Sciences, Laboratory of Autonomous Robotic Systems, Programmer, 39, 14 line V.O., Saint Petersburg, 199178, Russia, quietisaac@yandex.ru, ORCID: 0000-0001-8003-3643
0344 Быков Александр Норайрович, СПб ФИЦ РАН, Лаборатория автономных робототехнических систем, м н с., 199178, Санкт Петербург, 14-я линия В О., д. 39, bykov.a@iias.spb.su, ORCID: 0000-0001-8025-7209 Ерашов Алексей Алексееевич, СПб ФИЦ РАН, Лаборатория автономных робототехнических систем, программист, 199178, Санкт Петербург, 14-я линия В О., д.
17. Itoh, J.-I., Noguchi, K. and Orikawa, K., 2014. System design of electric assisted bicycle using EDLCs and wireless charger. In: Proceedings of International Power Electronics Conference (IPEC-Hiroshima 2014 – ECCEASIA), pp.2277-2284. DOI: 10.1109/IPEC.2014.6869907.
Аleksandr N. Bykov, Saint Petersburg Federal Research Center of the Russian Academy of Sciences, Laboratory of Autonomous Robotic Systems, Junior Research Scientist, 39, 14 line V.O., Saint Petersburg, 199178, Russia, bykov.a@iias.spb.su, ORCID: 0000-0001-8025-7209
27. Abramovitz, A. and Ben Yaakov, S., 1991. A novel self-oscillating synchronously-rectified dc-dc converter. In: PESC '91 Record 22nd Annual IEEE Power Electronics Specialists Conference, pp.163-170. DOI: 10.1109/PESC.1991.162670.28.Vatamaniuk,I.V.andYakovlev, R.N., 2019. Algorithmic model of a distributed corporate notification system in context of a corporate cyber-physical system. Modeling, optimization and information technology, 7(4), pp.386-391. DOI:29.10.26102/2310-6018/2019.27.4.026.Vatamaniuk,I.V.andYakovlev,R.N., 2019. Generalized Theoretical Models of Cyberphysical Systems. Proceedings of the Southwest State University, 23(6), pp.161-175. DOI: 10.1109/IS48319.2020.9200171. ORCID: 0000-0001-630339, quietisaac@yandex.ru, ORCID: 0000-0001-80033643
Konstantin D. Krestovnikov, Saint Petersburg Federal Research Center of the Russian Academy of Sciences, Laboratory of Autonomous Robotic Systems, Postgraduate Student, Junior Research Scientist, 39, 14 line V.O., Saint Petersburg, 199178, Russia, k.krestovnikov@iias.spb.su, ORCID: 0000-0001-6303-0344
Информация об авторах Крестовников Константин Дмитриевич, Санкт Петербургский Федеральный исследовательский центр Российской академии наук (СПб ФИЦ РАН), Лаборатория автономных робототехнических систем, аспирант, м.н.с., 199178, Санкт Петербург, 14-я линия В.О., д. 39, k.krestovnikov@iias.spb.su,
20. Soichiro, I.T.O., Tsuchida, Y. and Fukui, M., 2019. An Implementation of Wireless Power Transfer System for Multiple Receivers. In: IEEE International Conference on Consumer Electronics (ICCE), pp.1-4. DOI: 10.1109/ICCE.2019.8661995.21.Chow,J.P.W.etal.,2019.
25. Abdolkhani, A. and Hu, A.P., 2014. Improved autonomous current-fed push–pull resonant inverter. IET Power Electronics, 7(8), pp.2103-2110. DOI:10.1049/iet-pel.2013.0749.
26. Hu, A.P. and Si, P., 2004. A low cost portable car heater based on a novel current-fed push-pull inverter. In: Australasian Universities Power Engineering Conference
19. Feng, J. et al., 2019. Transmitter coils design for free-positioning omnidirectional wireless power transfer system. IEEE Transactions on Industrial Informatics, 15(8), pp.4656-4664. DOI: 10.1109/TII.2019.2908217.
J.9306
просы, связан оставки воин й при управл для его осущ спортного соо
ние
о
Гречушк о е казенное в о и ческого обес п МТО ), Научн о го обеспечен и Российская
r echushkin , r y Educational I Russian Fede r ical Support o f ated to the us o manage the cluded that th pace and sta anned vehicle eater.
их зарубежны я и проходят ботизированн ение которых
Owned «Milita r Defense of the rial and Tech n
нные of an movemenint
ROBOTICS and 207
ith issues rela a new way to sis, it is conc cy, reliability, l control, ma cle, UAV, repe в ведущ абатываются ипажные (роб (БТС), движе
(Received
емя
В .
(
РОБОТ УДК DOI:: 1 C. 207 С Ф а к Анно В ста ве тра ально женно мично Ключ Спосо ство, лотны Me of t R e Abstr The improBasedelivaed Key w mannMetho Введ В ствах экипаж портн ТОТЕХНИКА и Т Управле 71623.40.31776/RTC-213 Способ ие едеральное г о адемия мате р Российской Ф материаль отация тье рассматр анспортных к ой транспорт ого способа ость и стабил чевые слова об, иерархич колонна, сис ый летательн ethod for hi Federal Statehe Ministry of search of Mat e ract article deals w ery and offers d on the analy ve the efficien words od, hierarchica ed aerial vehi дение последнее вр активно разр жные и безэк ные средства ЕХНИЧЕСКАЯ К
И . В сударственн о иально техн и едерации ,
рархическ
( Материал п о
ин
e
Igor O. Pr nstitution of L o ration (Military f the Armed repin-alexandFor 28 D e se of unmanne intelligent tra he use of the bility of transp тран the Army A. arch К hrulyov» Military Syste m sburg, Russia,
ления инте влении дви , И . О . П р о енное образо в п ечения имени о исследоват е ия Вооруженн ы Федерация , r e ступил в редак ц
технического stemRepinwhen of
for military ca nvoy’splementationmovemntrolsystem, транспортных Федерации п втотранспорт ремя проводя 9(3) та кту ло ит ед пи ent.rgocanunко ока ных тся
, unmanned v ых государ испытания ные) транс осуществ TECHNICAL CYB 7 еллектуаль ижением к утчиков , А в ательное уч р генерала арм льский инсти т х Сил Росси й e pin-alexandr @ ию 28 декабря енением безэ и предлагает нием колонн озволяет пов портное сред ема управлен ntelligent tra t of a utchikov,convoA o gistics name d Academy of L o rces of the Ru s r @yandex.ru e cember 2020) ed vehicles as ansport pproposedsystemmeortcommunicvehicle,convo ляется в сос лонн (БТК). В настоя не разработ средств в со BERNETICS ьной транс олонны А . В . Репин р еждение выс ш ии А В Хруле в ут ( военно с ской Федерац и yandex.ru 2020 года ) экипажных тр тся новый спо ы Показано, высить эффе дство, безэки ния, система ansport sys Aoylexandr V. after General o gistics), Rese a s sian Federati o s part of trans m when contro thod and syst cation.oy,logistics, a ставе безэкип ящее время в таны опытные оставе БТК, н спортной с ш его образова н в а » Министер с истемных ис с ии ), Санкт Пе ранспортных с особ управле , что использ ективность, н ипажное
ление, экипа автоматизиро ретранслятор
Institute ( o n), Saint Pete r sport convoys rolling the con tem for its im automated co пажных автот в Российской е образцы а но в то же вр 2021; системой ия « Военная ства обороны ледований тербург , средств в сос ения интелле зование пред надёжность, р нспортное ср о зрения, бес controlling V.
erarchicalIgorV.Gr
( В А но техническ о иваются воп олонн для до ной системо и системы д ьность транс еское управ тема МТО, а ый аппарат
managemethe
кого управл при управ
с приме ских грузов, лении движен ествления по общения. ажное трансп ованная систе р ent
КИБЕРНЕТИКА /
за данного расстояния до впереди идущего транспортного средства при соблюдении требований безопасности Основными недостатками известного способа при управлении движением колонны являются последова тельная передача данных от ведущего к ведомому ТС и использование для вычислений бортовых мощно стей ведомых ТС, что неизбежно приведет к задержке в вычислениях и скорости реакции у замыкающих ТС при групповых действиях в колонне Кроме того, пове дение ведущего ТС, если только оно не является го ловным, будет зависеть не только от передаваемых на ведомое ТС технических параметров, но и от пове денческих факторов совокупности транспортных средств, для которых ведущее ТС само является ве домым Таким образом, данный способ применим только в качестве вспомогательного при централизо ванном управлении колонной ТС Частично проблему цепной задержки вычислений предлагается решить в изобретении [2] путем расста новки ТС в колонне в порядке убывания тормозного пути от головы до замыкания колонны, что неприме нимо для проводки военных колонн, где ТС занимают место не по массогабаритным характеристикам, а по целевому назначению Известен способ полуавтономного управления движением колонны [3], в котором определен способ переназначения ведущего ТС, а также способ [4], определяющий в числе прочего набор условий, при котором происходит замена ведущего ТС, учитываю щий возможности присоединения новых ТС к колонне и выхода ТС из нее Также известен способ [5] ограничения текущей рабочей скорости ТС и управляющая система актив ной регулировки подвески и контроля скорости, явля ющийся в том числе способом упреждающего
Управление / Control 208 научно исследовательские работы, направленные на обоснование необходимости разработки и применения образцов безэкипажных транспортных средств в соста ве колонн в военных целях, в том числе и для решения задач материально технического обеспечения войск (сил). В целях создания экспериментальных образцов безэкипажных транспортных колонн может быть ис пользован научно технический задел по разработке безэкипажных транспортных средств Ряд исследований, проводимых отечественными и зарубежными научно исследовательскими институтами и компаниями разработчиками автомобильной техники, показывает, что следствием применения БТК является снижение расхода топлива при грузоперевозках, кото рое может составить, по разным оценкам, от 7 до 20%. Данный факт свидетельствует о том, что применение БТК в системе МТО в перспективе не только будет спо собствовать сбережению жизней личного состава ВС, но и существенно повысит эффективность воинских перевозок автомобильным транспортом. Технический облик БТК при этом будет, в основном, определяться способом управления движением БТК
и область применения, что обусловлено следующими особенностями последних: 1. Невозможность использования для передачи информации, необходимой для управления движе нием БТК, одного канала связи, что существенно снизило бы надёжность управления из за высокой вероятности потери связи в случае применения ве роятным противником средств радиоподавления, а также при движении по участкам дорог, где есть пре пятствия надёжной передаче сигналов управления, например, по извилистым горным дорогам (рис. 1). 2. Потребность в применении средств контроля состояния дорожной обстановки на различных физиче ских принципах, предназначенных не только для опре деления расстояния до ближайшего ТС, но и для выяв ления различных типов препятствий движению БТС, рельефа дороги, качества дорожного полотна, что необходимо для управления колонной в условиях без дорожья, в зимнее время и при плохих погодных усло виях
Ограничения применимости известных способов управления для проводки транспортных колонн для перевозки военных грузов Известные способы управления интеллектуаль ной транспортной системой при управлении движе нием транспортных колонн для перевозки военных грузов имеют ограниченные функциональные воз можности
Известные способы
Из предшествующего уровня развития техники из вестен способ управления интеллектуальной транс портной системой при управлении движением колон ны [1], содержащей ведущее транспортное средство (ТС), которое отслеживает рельеф дороги и устанав ливает ограничение скорости, и по меньшей мере од но ведомое транспортное средство, каждое из кото рых имеет блоки позиционирования и беспроводной связи. При этом ведомое транспортное средство на основании переданных ведущим ТС данных об окру жающей обстановке и по крайней мере одного пара метра состояния ведущего ТС определяет стратегию своего движения на основании прогноза поведения ведущего транспортного средства Передаваемыми параметрами могут быть масса ТС, мощность двигате ля, лобовое сопротивление и др Основная задача, ре шаемая предложенным способом – удерживание управ ления системой подвески ТС и его текущей рабочей скоростью в ответ на определенное или возникшее резкое изменение рельефа дороги Существенным недостатком способа является предложение исполь зовать для упреждающего управления системой под вески данные сканирования рельефа, записанные ведущим ТС, без указания метода обеспечения при вязки этих данных к текущему рельефу ведомым ТС
для опера окращения о быстро изит риск Б иера к каждой
К от
но нно на
Convoy movemen правления ационного единого последо движе выдачи




ла ав ча с
льности
хнической ос а ППУ и мето
КИБЕРНЕТИКА
сети и н уровня
и
выхода посл
ия
ения ППУ д важно для со ния данных нию, что сн увеличит об об автоматиз К [6], включаю средство (П атически упр водителем э ия на провод арактеристика ляющих ее, ированных по шрутных карт, ршруте состо ых условий, и ной карте пр енения дорож с преимущес ического упра зи, имеет сл
го


рализации уп ении информа Управление я (ППУ) всем о надежност льных проце ся состояние и необходи информации о времени дл
бщую ско зированно ющий одно ПТС) и по равляемое кипажного дку колон ами (ТТХ) маршрута од реаль , ответный ояния каж и выполне ри выявле жных усло ствами ис авления и ледующие TECHNICAL CYB 9 автомобилей по nt along the moun 1. Возмо всей БТК вс ПТС, в том го противни по колонне 2. Непро щенности П ки замены и него из стро 3. Оторв ления, ее ф ционно упра Особенност управления В целях расширения сти примене ления движ ется в следу Управле ППУ автомо головной ма полагаются тель операт манд управл состоянии ка на пункты у лений (звен автомобиль зованием ав материальн ВС РФ, а у осуществля ловной маш BERNETICS горной дороге ntain road ожность поте следствие вых числе вследс ка по дорожн одуманность ПУ колонной им ведущего оя ванность БТК функциониров авляющего по ти предлагае я БТК х повышения я функционал ения предла ением БТК, ующем ние движени обильной кол ашины отдел начальник к тор), путём д ления и теле аждого ТС, до правления го ньев). В свою ной колонной втоматизиров о техническо управление
уществляется нкциями пер , в котором р оператор (во й передачи й информаци огодных усло шин других от управление П яется с испо емы управле ения АСУ М лениях (звень принципу от ей (рис. 2). ого ди ед ав ма , вой ас ди ко о вий де ПУ ль ния ТО ях)
оба
БТС
техн спортных сре ения и компл ТТХ каждого и роль при движ БТС, дорожн действий согл редствами ко Данный спос зования прин оканальных статки: ЕХНИЧЕСКАЯ К Р ь

ения движени я единственн йствия вероят непосредстве
ти управлен жностей и об й способ упр торого заклю
ТОТЕХНИКА и Т
3.


я
купностью БТ с двух ТС н ижного пункт ено с ограни объемности которых п БТС большо в режим кома Необходим управлени енной задер икающих пом ийности и, ка ь движения ко роме того, из равления дви тируемое тра шей мере о включающий спортного сре тактико в децентр С и расшире а всю БТК У а управлени чениями его вычислите рогнозируетс в колонне, го массива е реального нд ость примен я БТК, что в жки получен ехах движе к следствие, лонны вестен спосо жением БТК нспортное дно автома получение дства задан ическими ха дств, состав екта адапти з БТС марш ении на мар ых и погодны асно указанн нтроля изме об, наряду с ципа иерарх систем связ
вляющих
ины
Figure 1 — C
2021;
х центров упр диного инфор
жение колонны а
ботке
ого
с
ми ТС со и по при ессов, на е
РОБОТ
/
имостью в и о
ля



Потребност
ется по
Рисунок 1 — Движ
ери управле хода из строя ствие воздей ной тех й, ТС дублёра ТС в случае внешних вание вне ед оля







емого спосо надёжнос льных возмож гается новый сущность кот
ием БТК осу лонной с фу ления (звена) колонны и о двусторонне еметрической орожных и по оловных маш ю очередь у й осуществл ванной систе ого обеспече БТС в отдел архическому й последующ
ве









ROBOTICS and 209

9(3) ем
совок поля подви пряже чине основ вател обраб нии Б управ 4. тивно време возни авари рость Кр го упр пилот меньш БТС, транс ны с транс движе ные Т контр дого Б ние д нии с вий Д польз много недос ,
соответствую рты

колонне
чивого сигна 210 нной: 1 – пункт уп ажное ТС; 4 – бес е либо мобильны trol center
system of an unm nd squad (unit); 3 АСУ МТО ВС ние движени её состав, о екты маршру к и безэкип ированные п ются между своем состо о иерархичес вижения ТС ных карт по ТС и пр условий на При дви роль состоян огодных усло о указанной е реального в усторонняя пе головным маш каждому БТС дого БТС, р го движении условиях на ачу данных ос вательно че ыполненные м ненными в с
реакции
других
ектов в ГИС овать действ рования, зад рости переда
я глобальны рельсов» для и БТК, связан рожной обста щения БТС в стников движ альных изме го и техноге ствие воздей ой сети и по что может пот самостояте маневр и т п омогательных ния, предупр ляется прежд ав которых в е или дистанц
х
дого
нспортной колон ена); 3 – безэкипа (стационарные convoy: 1 – cont nsport vehicle; 4
вать
ся
маневр
зэкипажной тра о отделения (зве
ления торы g car of ьно за ионно остро анные стран каждое стона клоне систе з нее в о дру схему реали ежнее, кружа может итель держек ачи на ых тра я БТС, нных с ановки колон жения, енений енного йствия самой требо ельной ). х авто режде девре каче ционно
ают задания учётом ТТХ ршрутов дви ля всех – как ранспортных е ТТХ ТС, а еметрической жных и погод пу. ют корректи техническому ояния дорож передачу на ектированной аршруту вы ТС, реальных олнение дей карте При ществляется ных о марш лений (звень техническом выполнения у и о локаль го движения т, начиная от ва связи и ными, иерар с порядком нне и БТС в предвари нных данных структуры [7]. аршруту осу ния, который ТС осно ой спутнико нерциальной of , появл , характера вероятно с от ( Поэто с об о д голо
менным
машина 1-го отдел т; 5 – ретранслят (unit)); 2 – leading or mobile) ания). предваритель информаци волит БТС п ираясь на д нства и про Для этого к о своем ме нируемых от рмационную считывать из нформацию истеме такую онне можно р шевле и наде их 3D-карт ок







на

номных
ния
правления (leading car vehicle; 5 1st squad (stationary o карты позв , простран БТС данные корости, план диную инфор озможность с алогичную и мационной си ду ТС в коло ственнее, деш динамически ложение объе соответство к позиционир ехватки скоро ижения). пция задания иртуальных р лем проводки енением дор ого перемещ оронних учас сти ТС, лока й природног сле как следс а по дорожно поражения, ч едлительной орможение, м отказ от вспо ического зрен ка представл лонн, в соста ы экипажные
вать
a con unmanned aeria я Х к х а й у а й х и я м я т и м х й й ла со спут Опери груженно управляю ить само об окруж ственного БТС долж хождении ниях от м му колонн реальном гих БТС взаимоде зовать бы чем путе ющего пр В то ж не всегда ности (в передачи высоких с Кроме екторий к не решае непредви по причин не
( aters
го блокирова С данными п бортовую у
Упр Р Fig на ТС же эки сре ТС инф ны ров сос ны каж ма пол дор ств это кон рут ев) сос дей ны Пр ПП упр хич дви отд тел о р Кон ще вы ван вой сис равление / Contr Рисунок 2 — Схем (звена)); 2 – голо gure 2 — Controlthe2n При этом с осуществлен С, входящих в ния и компле ипажных, та едств, адапт С обмениваю формацией о х условиях по Во время д вку маршрутн стоянию кажд х и погодных ждое ТС с ршрутной ка лняется контр рожных и по вий согласно ом в режиме нтроль и дву те от ППУ к г ), а от них к к стоянии кажд йствий при е х дорожных ичём переда ПУ последов равления, вы чески подчин ижения отде делениях (зве Траектории льно, основы рельефе мест нтроль движе ествляется бо числяет точн нии данных й системы ( стемы навига rol ма управления бе овная машина 2-г
елений (звень еньях), и обра движения ТС ваясь на геои тности и объе ения ТС по з ортовым бло ное месторас глобальной (ГНСС) и ав ации (на случ

anned transport – unmanned tran РФ поступ я колонны с писания мар тных карт дл ажных – т од реальные собой теле янии, дорож кому принци осуществляю реальному т огнозу состо маршруте, щей скорре жении по м ия каждого Т вий, и выпо маршрутной ремени осу редача данн инам отдел и обратно о езультатах по маршруту маршруте ег уществляют рез средств ногоканальн оответствии ев) в колон тно намечаютс нформацион ктах инфрас аданному ма ком управлен положение навигационно тономной ин ай неустойч





стве
колон спилотный летат ые) nvoy
– repe тников или ег ирование ГИС й в ющую систем остоятельный жающей моде о положения жно передав и, текущей ск маршрута в е ны и иметь в м времени ан В геоинформ ействия межд ыстрее, качес м создания ространства же время пол а полностью силу ошибо и данных, не скоростях дви е того, конце как неких «ви ет всех пробл иденным изм нам нештатн ления посто ой аварийнос препятстви а, в том чис го противник средствами п БТС незаме экстренное т ому полный о систем техни опасности по даже для кол овных введен нной (головная м тельный аппарат of the
опи ели
возможно рельефа
l


риментально
мо
схему на ри БТК о путём управ янии пункт образом БТС марш : динам круиз кон ПТС поверхнос , против , преду аппарата на удал о сост в маршрутных д ление данных МТО ВС РФ, зация ТС на м может осущес ных постоянн енных, актив установленны еобходимо о ется для упра зцов БТК На БТК предла у управления ис. 3. В данно осуществляет двусторонн теле ТС, управлени
деления (звена)); e 1st
на


очередь упра ия автомобил ьзованием А делениях (зве нному принци ледующих в данной сх а звена (ГМ авление все раздавать с ые единой и анды управле лив границы, мать решени фицированно ой БТК подтал й схемы, в ча формирует с тому моменту быть наруш следом БТС у автономных с ки, хотя могл дополнением ционной сет нных – являе схеме больш БТС, то в мод ь командных ость БТС в у тв техническо БТК Следует так и при пар ции и команд рахованы от п чае поражени необходимо З машинами я ведомых ТС в момент зам ефицита инф правления
может
производитс кализации д я самостоят нных сценар , средства у локальных движен времени ически упра троля, средс ижайших БТ конфигураци епятствий, ти дороги занных с поя ций, наприм ника по доро смотрен запу (БЛА), спос ении от коло оянии дорож ремени на П карт ействия пом ГНСС и затр БТС с ПТС, естности и у твляться с и о действующ ных или па х на маршру тметить, что вления движ этапе созд гается испол движением м способе у ся с ППУ авт ей передач метрической дорожных и я головных
ся деление ко дорожной обс тельных дей иев развития управления и дорожных и ия каждого Б огут включать авляемую ад ства контроля ТС, радарные ии рельефа системы кон
пективных
управления коло зэкипажное ТС; 4 voy: 1 – control ce anned transport ve BERNETICS в). В свою о м управлени ется с исполь ие БТС в отде ентрализован аждой из посл я на то, что вная машина прямое упра ее было бы ные ею данны лонны и кома вена







и бл нозирования ределения пр ния
условиях
асных или оздействии редствами ного лета твовать по давать ин БТС пред именталь рощённую тавленную движением й колонной (команд) о на отделе (звенье действи движения выбыт , определ приним енению модиф ороны первой БТС инф – к эт может уже ом идущее с собственных а ой обстановк и Логичным д ой информа ционных дан ли в первой ятельность БТ слаженность шит потребно абора средст стоимость Б овательном, т ии информац вена не застр овкой в случ этот случай мещения ГМЗ реподчинения ий колонны в условиях де тия машин уп
до
исунок 3 — Схем 2 ure 3 — Control s ЕХНИЧЕСКАЯ К

а управления экс головная маши ystem of an expe 2 – leading ca
/
ии
ему
олонны на становки и йствий на я событий. и контроля погодных БТС в ре ь в себя, даптивную я расстоя е системы местности нтроля со



напри систе ния д прогн и опр стоян В
хеме взаимод МЗ) может о еми БТС зве ГМЗ собранн нформацион ения, общие д внутри котор я самостояте ой схемы упр лкивают отри астности то, следующее ли у модель дви ена остальны узнает лишь средств осве ло бы узнать м схемы – уча и и источни ется БЛА Та ший упор сде дифицирован действий, ко становке мак ого зрения, с учесть, что раллельном р д управления потери контр ия головной предусмотр других звень С, общий сце ены ППУ, схе формации всл squad из лан ной , му ед
машина 1-го отд ры (мобильные) (leading car of the ers (mobile) 2021;
ст ком ким
и
онной (головная 4 – ретранслятор nter of a convoy ( ehicle; 4 – repeate
мех, блокиру рудняющих с так и между управление д использовани щих стациона ссивных рет уте данный спо жением персп дания экспер льзовать упр БТК, предст управление д томобильной чи сигналов й информаци и погодных ус машин други спериментально ина 2-го отделени rimental unmanne ar of the 2nd squad
авление подв льной колон СУ МТО ВС еньях) осущес ипу: от голов
реального имер
жения
мацию
реального
ы
звень повыш случа Та
и вий по
их
шруту
то си ни как ас от оля ма еть ев
свя ийных ситуа ятного
ного
КИБЕРНЕТИКА
каждого
управ
Ри Figu ТОТЕХНИКА и Т вляемые ТС и ья с целью ло шения уровн ай неотработа аким
ступл АСУ М кализ БТК м нальн време ров, у Не лагае образ ной
ояния
(unit)) 9(3) иж ной РФ, тв ной ей су на, ые ной ля ых ль ав ца что шь же ми по ще
тоянии
вления и
состо услов жиме
ным пункто осуществля а управлени ляется по це машины к ка Несмотр ствия голов ществлять рациональн и обобщенн системы кол всех БТС зв БИУС БТС м но К приме ления экспе тельные сто впереди иду о своем сос ния колонны БТС Об это средством с ния дорожн единой сети ником един геоинформа образом, ес на самостоя второй – на рая уменьш мального на зив общую при последо пространени ГМЗ, БТС зв над обстано шины На э порядок зам порядок пер рий
ущее
явлением опа мер, при во ожной сети ср уск беспилотн собного дейст онны и перед жной обстано ППУ с целью
овки в ре корректи ующих по связь как с у
ы
авари вероя пораж тельн марш форм жиме ровки В
м
случаях
руту
состо словий
РОБОТ
;
ROBOTICS and
ой БТК: 1 – пункт у ия (звена); 3 – бе ed transport conv d (unit); 3 – unma TECHNICAL CYB 1 ний





, ло движением ием регио арных или транслято особ
в ствие
21
опубл
Управление / Control 212 Системы и средства, участвующие в реализации способа Для реализации приведенного способа целесо образно предусмотреть создание эксперименталь ных образцов следующих средств: 1. Автоматизированной системы управления (АСУ), размещенной на автоматизированном рабо чем месте в ППУ колонной, состоящей из подсистем: АСУ автомобильной колонной в составе до 5060 БТС (АСУ головных машин звеньев); иерархически ей подчиненной АСУ автомо бильной колонной в составе до 10 БТС (звеньевая АСУ2.). Единой геоинформационной динамически об новляемой системы колонны 3. Системы технического зрения (далее СТЗ) БТС, в состав которой могут входить в зависимости от степени сложности решаемой при помощи БТК задачи: система видеонаблюдения; система контроля окружающей обстановки на базе радиолокационной станции; система контроля окружающей обстановки на базе сканирующих лазерных дальномеров (лидаров); система контроля окружающей обстановки на базе ультразвуковых датчиков
за явл
его
5. Системы связи, в состав которой будут вхо дить: радиосвязи для осуществ ления, новизна которых подтверждается проведён ными патентными исследованиями Его применение расширяет возможности по эффективной и надежной транспортировке грузов в различной дорожной об становке (особенно в условиях возникновения чрез вычайных ситуаций природного, техногенного и во енного характера), ритмичной и стабильной транс портировке грузов в условиях низкой пропускной способности дорожной сети, с учётом её текущего технического состояния, что приведет к повышению эффективности, надёжности, ритмичности и ста бильности как транспортных перевозок в целях МТО ВС РФ, так и в целом всего транспортного сообще
система
/
Литература
№ SE 2014/051120: заявл. 26.09.14: опубл 02.04.15 / A. Alam [et al.]; заявитель и патентообладатель Scania CV AB. – Текст: непосредственный. 2. Патент № JP WO 2018/043753 международный
ния
1. Патент № WO 2015/047179 международный. Control unit and method to control a vehicle in a vehicle platoon based on the predicted behaviour of the preceeding vehicle: . Corps run management system: № JP 2017/031906: . 05.09.17: . 24.06.19 H. Hasebe; Nabtesco Automotive Co., Ltd. – Текст: непосредственный
3. Патент № US 9,511,764 Semi-autonomous mode control: № US 14/193,364: заявл. 28.02.14: опубл: 06.12.16 / T.E. Pilutti, M.Y. Rupp, R.A. Trombley, A. Waldis; заявитель и патентообладатель Ford Global Technologies LLC. –Текст: непосредственный 4. Патент № US 9,494,944. Device and method for choosing leader vehicle of a vehicle platoon: № US 14/771,840: заявл. 27.02.14: опубл. 15.11.16 / A. Alam, M. Sokalla; заявитель и патентообладатель Scania CV AB. – Текст: непосредственный. 5. Патент № US 2017/0106855. Systems and methods for abrupt road change assist and active suspension control: № US 14/887,934: заявл. 20.10.15: опубл. 20.04.17 / E.M. Lavoie, M.A. Bahena; заявитель и патентообладатель Ford Global Technologies LLC. – Текст: непосредственный 6. Патент № 2690143 Российская Федерация, МПК B60W 30/165 (2012.01) G07C 5/08 (2006.01) Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении дви жением колонны на территориях с холодным климатом: № 2018125208: заявл. 10.07.2018: опубл. 30.05.2019 / С Е Бузников [и др.]; заявитель ФГУП «НАМИ». – Текст: непосредственный 7. Концепция подвижности наземных транспортно технологических машин / В В Беляков [и др.] // Труды НГТУ им Р Е Алексеева. – 2013. – № 3 (100). – С. 145-174. – Текст: непосредственный
заявитель и патентообладатель
4. Программно аппаратных средств комплекси рованной обработки сигналов от различных подси стем СТЗ с целью повышения надежности и точности распознавания окружающей обстановки
колонны с вышестоящим звеном на базе штатных средств радиосвязи, с воз можностью сопряжения с существующей АСУ МТО ВС РФ; система радиосвязи между ТС колонны на базе существующих и перспективных средств радиосвязи; система оптической связи между ТС в колонне 6. Системы наземного сетевого информационно го покрытия зоны перевозок (комплекс помехозащи щенной связи, на низких выходных мощностях, об ладающий разведзащищенностью, обеспечивающий ретрансляцию сигналов управления и навигацион ных данных в условиях применения средств РЭБ, отсутствия сигналов ГНСС). Заключение Таким образом, разработан новый способ управ ления движением БТК и система
3. Ford Global Technologies LLC, 2014. Semi-autonomous mode control. US 9,511,764.
5. Ford Global Technologies LLC, 2015. Systems and methods for abrupt road change assist and active suspension control. US 2017/0106855.
Информация об авторах Гречушкин Игорь Васильевич, к т н., с н с., федеральное государственное казенное военное образова тельное учреждение высшего образования «Военная академия материально технического обеспечения име ни генерала
Information about the authors
References
Репин Александр Владимирович, ВА МТО, Научно исследовательский институт (военно системных ис следований материально технического обеспечения Вооруженных Сил Российской Федерации), м н с., 191123, Санкт Петербург, Воскресенская набережная, д. 10а, тел.: +7(960)272-98-97, repin-alexandr@yandex.ru
Igor O. Prutchikov, Doctor in Engineering Sciences, Professor, Federal State-Owned «Military Educational Institution of Logistics named after General of the Army A.V. Кhrulyov» of the Ministry of Defense of the Russian Federation (Military Academy of Logistics), Research Institute (Military System Research of Material and Technical Support of the Armed Forces of the Russian Federation), Senior Research Scientist, 10a, Voskresenskaya naberezhnaya, Saint Petersburg, 191123, Russia, tel.: +7(911)245-75-71, vpio277254@mail.ru
4. Scania CV AB, 2014. Device and method for choosing leader vehicle of a vehicle platoon. US 9,494,944.
Alexandr V. Repin, Federal State-Owned «Military Educational Institution of Logistics named after General of the Army A.V. Кhrulyov» of the Ministry of Defense of the Russian Federation (Military Academy of Logistics), Research Institute (Military System Research of Material and Technical Support of the Armed Forces of the Russian Federation), Junior Research Scientist, 10a, Voskresenskaya naberezhnaya, Saint Petersburg, 191123, Russia, tel.: +7(960)272-98-97, repin-alexandr@yandex.ru
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 213
7. Belyakov, V.V. et al., 2013. Kontseptsiya podvizhnosti nazemnykh transportno-tekhnologicheskikh mashin [The concept of mobility of ground transport and technological vehicles]. Trudy NGTU im. R.E. Alekseeva, 3(100), pp.145174. (in Russian). армии А.В. Хрулева» Министерства обороны Российской Федерации (ВА МТО), Научно исследовательский институт (военно системных исследований материально технического обеспечения Во оруженных Сил Российской Федерации), н с., 191123, Санкт Петербург, Воскресенская набережная, д. 10а, тел.: +7(981)885-49-87, irgrechuhkin1949@yandex.ru Прутчиков Игорь Олегович, д т н., профессор, ВА МТО, Научно исследовательский институт (военно системных исследований материально технического обеспечения Вооруженных Сил Российской Фе дерации), с н с., 191123, Санкт Петербург, Воскресенская набережная, д. 10а, тел.: +7(911)245-75-71, vpio277254@mail.ru
2. Nabtesco Automotive Co., Ltd., 2017. Corps run management system. JP WO 2018/043753.
Igor V. Grechushkin, PhD in Engineering Sciences, Senior Research Scientist, Federal State-Owned «Military Educational Institution of Logistics named after General of the Army A.V. Кhrulyov» of the Ministry of Defense of the Russian Federation (Military Academy of Logistics), Research Institute (Military System Research of Material and Technical Support of the Armed Forces of the Russian Federation), Research Scientist, 10a, Voskresenskaya naberezhnaya, Saint Petersburg, 191123, Russia, tel.: +7(981)885-49-87, irgrechuhkin1949@yandex.ru
1. Scania CV AB, 2014. Control unit and method to control a vehicle in a vehicle platoon based on the predicted behaviour of the preceeding vehicle. SE 2014/051120.
6. FSUE «NAMI» State Research Center of the Russian Federation, 2018. Sposob prognosticheskogo ierarkhicheskogo upravleniya intellektual'noy transportnoy sistemoy pri upravlenii dvizheniem kolonny na territoriyakh s kholodnym klimatom [method of predictive hierarchical control of an intelligent transport system when controlling the movement of a column in areas with a cold climate]. RU 2690143. (in Russian).
Abstract
(Received 16 June 2021)
Mapping of linear road features with the inverse visual detector observation model
Управление / Control 214 УДК: 004.942 DOI: 10.31776/RTCJ.9307 C. 214-224 Картографирование линейных признаков дороги с обратной моделью наблюдения детектора О . С . Шипитько , А . Е . Кабаков Институт проблем передачи информации им А А Харкевича Российской академии наук ( ИППИ РАН ), Москва , Российская Федерация , shipitko@visillect.com ( Материал поступил в редакцию 16 июня 2021 года ) Аннотация В работе предложен алгоритм картографирования линейных признаков, детектируемых на дорожном полотне – линий дорожной разметки, бордюров, границ дороги Алгоритм основывается на методе картографирования с обратной моделью наблюдения Предложена обратная модель наблюдения, учитывающая пространствен ную ошибку детектора линейных признаков Исследовано влияние различных параметров модели на резуль тирующее качество картографирования линейных признаков Алгоритм картографирования был протестиро ван на данных, записанных на беспилотном транспортном средстве при движение по тестовому полигону Качество алгоритма картографирования оценивалось по нескольким показателям качества, известным из литературы Дополнительно, задача картографирования рассматривалась как задача бинарной классифика ции, в которой каждая ячейка карты может содержать или не содержать искомый признак, а для оценки каче ства применялись ROC-кривая и AUC-ROC метрика В качестве наивного решения была построена карта, содержащая все задетектированные линейные признаки без какой либо дополнительной фильтрации. Для карты, построенной на основе исходных данных, AUC-ROC составила 0.75, а в результате применения алго ритма было достигнуто значение 0.81. Результаты экспериментов подтвердили, что предложенный алгоритм позволяет эффективно фильтровать шумы и ложные срабатывания детектора, что подтверждает примени мость предложенного алгоритма и обратной модели наблюдения для решения практических задач Ключевые слова линейные признаки, картографирование, обратная модель наблюдения, карта дороги, автономный автомобиль, цифровая карта дороги
The paper proposes an algorithm for mapping linear features detected on the roadway — road marking lines, curbs, road boundaries. The algorithm is based on a mapping method with an inverse observation model. An inverse observation model is proposed to take into account the spatial error of the linear feature visual detector. The influence of various parameters of the model on the resulting quality of mapping was studied. The mapping algorithm was tested on data recorded on an autonomous vehicle while driving at the test site. The quality of the mapping algorithm was assessed according to several quality metrics known from the literature. In addition, the mapping problem was considered as a binary classification problem, in which each map cell may or may not contain the desired feature, and the ROC curve and AUC-ROC metric were used to assess the quality. As a naive solution, a map was built containing all detected linear features without any additional filtering. For the map built on the basis of the raw data, the AUC-ROC was 0.75, and as a result of applying the algorithm, the value of 0.81 was reached. The experimental results have confirmed that the proposed algorithm can effectively filter noise and false-positive detections of the detector, which confirms the applicability of the proposed algorithm and the inverse observation model for solving practical problems.
Oleg S. Shipit’ko , Anatoly E. Kabakov Institute for Information Transmission Problems of the Russian Academy of Sciences (Kharkevich Institute), Moscow, Russia, shipitko@visillect.com
Введение Картографирование – это совокупность методов и алгоритмов создания карт, содержащих информацию об окружающей среде В робототехнике цифровые карты, отражающие рабочую среду робота, приме няются для определения собственного положения в пространстве [1], планирования пути [2], предотвра щения столкновений [3]. Качество карты напрямую влияет на точность решения перечисленных задач, поэтому картографирование является одной из фун даментальных проблем робототехники С момента появления систем помощи водителю и автономных автомобилей цифровые карты дорог стали неотъемлемой частью интеллектуальных транспортных систем [4]. Более того, существует ряд исследований, демонстрирующих, что высокоточные цифровые карты дорог являются ключевым факто ром создания автономного транспортного средства [4] классов 3-5 по классификации американской ас социации автомобильных инженеров (англ. Society of Automotive Engineers, SAE) [5].
Несмотря на то, что проблема картографирова ния широко изучена, существует лишь малое число научных работ, посвященных созданию высокоточ ных карт для автономного и подключенного транс порта Существующие методы картографирования требуют применения высокоточных систем позицио нирования и датчиков таких как система глобального позиционирования (Global Positioning System, GPS) с применением методов кинематики реального време ни (Real Time Kinematic, RTK) и лазерных дальноме ров (LIDAR) [6]. Таким образом, актуальна задача разработки алгоритмов картографирования дорож ной инфраструктуры, не требующих применения до рогостоящего сенсорного оборудования и позволя ющих создавать и обновлять высокоточные цифро вые карты дорог Заданным критериям соответству веро ятность того, что ячейка занята препятствием В процессе картографирования вероятность обновля ется в соответствии с тем или иным алгоритмом По окончании картографирования значения ячеек бина ризуются по порогу: ячейки, вероятность в которых превышает порог, признаются занятыми (непрохо димыми), другие считаются свободными (проходи мыми). Такой подход был предложен Ханс Моравек и Альберто Элфес [7], [8]. В работе [9], помимо самого принципа описания пространства картой занятости, авторы также пред ложили алгоритм, позволяющий построить карту на основе измерений ультразвуковых дальномеров В основе алгоритма лежит модель наблюдения – ве роятностная модель, моделирующая процесс изме рения сенсора и учитывающая внутренние, завися щие от самого сенсора, и внешние, зависящие от среды, источники ошибок измерения и ложных сра батываний сенсора Подход, предложенный Альбер то Элфес, является представителем класса методов, использующих так называемую обратную модель наблюдения (|,)1:1:pMzxtt , где M – карта, 1: zt –вектор измерений сенсора, 1: t – моменты времени в которые производятся измерения, 1: xt – известные положения робота в пространстве для каждого изме рения Такая модель получила название обратной из за того, что в ней предполагается зависимость реальных физических величин, например, расстоя ния до препятствия, от измерений, в то время как в реальности измерения сенсора зависят от конфигу рации реального мира Существуют также подходы с так называемой прямой моделью измерения (|,)1:1:pzMxtt В них оценивается вероятность совокупности измерений при условии фиксированной гипотезы о структуре карты Результирующая карта находится путем мак
Linear features, mapping, inverse observation model, road map, autonomous vehicle, digital road map.
ют алгоритмы, использующие камеры в качестве ис точника сенсорных данных Камеры обладают рядом преимуществ по сравнению с другими датчиками: они сравнительно дешевые, обеспечивают высокое пространственное разрешение и не подвержены ин терференции благодаря своей пассивной природе В данной работе предлагается алгоритм картографи рования визуально детектируемых линейных призна ков дороги (дорожной разметки и границ дороги) с помощью методов, применяющихся в робототехнике для построения карт проходимости Рассмотрим эти методы подробнее Один из самых распространенных подходов к представлению карт в робототехнике – карта прохо димости (occupancy grid map). Такая карта разбивает пространство на ячейки одинакового размера (хотя возможны и другие виды разбиений). В процессе по строения карты каждой ячейке присваивается
Key words
симизации вероятности измерений [10]. Рассмотре ние алгоритмов картографирования с прямой моде лью выходит за рамки данной работы Для подроб ного ознакомления читатель может обратиться к следующим источникам [10], [11]. Методы, разработанные для создания карт про ходимости, могут также быть применены для карто графирования произвольных признаков, детектируе мых роботом В таком случае ячейки карты хранят вероятность наличия того или иного признака в соот ветствующей области пространства Так, например, в работе [12] авторы высказывают идею многока нальных карт в контексте сельского хозяйства В предложенном подходе каждый канал карты содер жит информацию о том или ином семантическом
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 215
Управление / Control 216 признаке: почвы определенного типа, определенной культуры, непроходимого препятствия и так далее Элементы дорожной инфраструктуры, такие как дорожная разметка и границы дороги, являются ос новным источником информации для водителей транспортных средств Большинство существующих подходов к навигации автономных транспортных средств также используют дорожные ориентиры, со зданные для водителей Так, например, в автоном ном автомобиле Bertha компании Daimler AG [13] для навигации использовалась карта дорожной разметки Она создавалась путем детекции разметки на сте реоизображении дороги, приведенном к виду сверху Полученная автоматически карта доразмечалась в ручном режиме Метод, наиболее близкий к предложенному в данной работе, описан в работе [14]. В ней авторы рассматривают различные подходы к картографиро ванию дороги: создание карты занятости с помощью данных об интенсивности сигнала, получаемого от лазерного дальномера; создание RGB-карты дороги из данных камеры, путем склеивания кадров, приве денных к виду сверху; получение карты признаков, где в качестве признака выступает дорожная размет ка В последнем подходе ячейки карты содержат ве роятность нахождения разметки Авторы используют изображения камеры для детектирования дорожной разметки, после чего приводят точки, принадлежа щие задетектированной разметке к виду сверху и наносят на карту, используя байесовское правило обновления значений в ячейках, в которых уже со держится оценка вероятности с предыдущих шагов алгоритма картографирования Кроме того, авторы моделируют шум детекции дорожной разметки дву мерным нормальным распределением А также учи тывают падение точности детектирования разметки по мере удаления от автомобиля, связанную с пер спективным преобразованием изображения и влия нием меняющихся углов тангажа и крена автомобиля на оценку расстояния до задетектированной размет ки Для компенсации этих эффектов авторы вводят функцию отражающую убывание вероятности детек ции дорожной разметки с ростом расстояния до нее В этой работе рассматривается задача картогра фирования линейных признаков дороги – границ до роги и линий дорожной разметки Предложен алго ритм картографирования на основе метода построе ния карт проходимости с обратной моделью наблю дения Входом алгоритма является набор ломаных, детектируемых на изображении камеры, установлен ной на автомобиле Шум детектора моделируется двумерным нормальным распределением Резуль тирующая карта содержит вероятность нахождения линейного признака в каждой ячейке Алгоритм, предложенный в данной работе, отличается от предложенного в работе [14] тем, что картографиру ется не только дорожная разметка, но и границы до роги Кроме того, для учета ширины линий дорожной разметки используется информация о разрешении карты Ширина линии дорожной разметки регламен тирована стандартом [15]. В работе впервые прове ден анализ влияния параметров обратной модели наблюдения на качество алгоритма картографирова ния Алгоритм был протестирован на данных, полу ченных с беспилотного автомобиля Результаты экс периментов демонстрируют эффективность предло женного алгоритма для построения карт линейных дорожных признаков Картографирование линейных признаков с помощью обратной модели наблюдения В данной работе рассматривается задача карто графирования линейных признаков дороги, таких как границы дороги и дорожная разметка. На вход алго ритма картографирования поступает множество за детектированных на изображении ломаных, где каж дая ломаная задается множеством точек перегиба в системе координат, связанной с автомобилем Вы ходом алгоритма является растровая карта, содер жащая в каждой ячейке вероятность нахождения в ней линейного признака дороги Карта затем бинари зуется по порогу Будем различать два вида границ (линейных при знаков) дорожного полотна на изображении: края и хребты Край – ступенчатое изменение интенсивно сти на границе однородных областей изображения Хребет – пикообразное изменение интенсивности внутри однородной области изображения В качестве детектора линейных признаков дорожной разметки был выбран алгоритм, предложенный в работе [16]. Вход алгоритма детекции – изображение дороги, приведенное к виду сверху проективным преобразо ванием, известным из калибровки камеры Выход –множество ломаных zt Перед картографированием zt переводится из локальной системы координат камеры, в систему координат карты M с помощью заранее известной калибровки камеры и с учетом известного текущего положения автомобиля на карте. Далее, множество задетектированных ломаных наносится на карту Для учета ошибок детекции используется предложенная обратная модель наблюдения детектора Для каждо го нового измерения zt : 1. Создается локальная карта, соответствующая области видимости камеры для текущего измерения Значения ячеек карты в момент создания содержат нулевые значения Для всех ломаных в zt , заданных точками излома, находятся промежуточные значения с помощью алгоритма Брезенхэма [17]. Кроме того, ширина задетектированных ломаных увеличивается в направлении, перпендикулярном направлению каждого сегмента, и с учетом масштаба карты Это
ируется с арты При ятся также значения енно Дан твращения ках карты, втомобиль видимости карты ервого из ализируют им вероят метки рав рафирова твие в ней оятным В мер для яются для
больше чем 0 нал
и Т
учет про дполагаем, ных может ьным рас ного шума ем шаге ивается с значением
регла В яче
ие расши исывается тки в виде отношения жительного знаков В тались ну
ость
Рисунок 1 — И задетектирова ячейки карты, признак
вания
ритм картогр данных, полу спортного сре зовались рез х признаков с ались при пр Тестовый по орогу с нанес тям полигона рафирование горитмов, ра егменты [14]. рт сама по ототехнике н ду собой разл ]. Для объе арты мы исп чества С одн результаты ачества карт
женный
ка 2,,) , ITijij m ент корреляц , 〈〉〈〉 IT T
2.
Figure 1 — Illu markup step by ity of higherfindingthan0.








смоделиров елением
ве
3.
⎟ ⎠PTN ,
217
гл ачением l и нахождения 0.5
2021;
⎜ ⎝ P l P
l
но отрицатель TNP должны б еняемого дет нных происходит ии Мы пред гмента ломан ным нормаль остранственн предыдуще тей сворачи nn и з
ых дорожных ные
соотв сумми макси сумм ные о неогр котор стоит попад Ва мерен ся зн ности ной 0 ния д линей случа детек каждо рассм
ьного сра быть пред тектора на
в
ону
и д дает
ратной модели к о шагам Серым роятность нахож лый цвет обозна том обозначены о признаков малов
на
Предлож стировался of the inv step. Gray color m features in black color indi linear feat алгор наборе д транс использ записыва (рис. 2). Т реальную до К особенност льца, картогр ено для алг линейные се качества ка дачей В робо внению межд рования [18] олученной ка азателей кач полученные оказателей


тельно
картографирован цветом обозначе ждения в них лин ачает вероятност области в которы вероятно odel of the detect for which the prob e color – probabili hich the presence
овым
дартного
))ap
ТОТЕХНИКА
шум
стран что ш быть преде детек локал гауссо станд
⎜ ⎝
⎞ ⎟ ⎠P ,
T TN log 1 ⎛ P P истинн ора TPP и P ны для прим нтальных дан щем шаге ибок детекц каждого сег ан двухмерн я учета про енная на вероятност размером онения локальная участком гл чений логар инимально [ lmax , ]lmin необходимы роста значе н, наприме олгое время от же локаль ь, что до по обальные ка , 0 Mij , со в ячейке до овами до на ейки наличи ов считаетс вания нес
нственных
себе являе нет единого п личных мето ективной оце пользовали ной стороны на основе кл т, таких как M ны ей ь х tyedabil-of те то ар ек рех то ав ной сти ло их тся од дов нки два мы ас
l
разметки, 1256-2018.
РОБОТ
ограничения раниченного рый
и т ажно
номного гру тографирова ции линейны камер Данн вому полиго ляет собой разметкой К наличие кол бы затрудн лишь прямо Оценка сложной зад хода к срав картографир качества по набора пока оценивали п сических по Score ( MS ) ,( ∑ MSij и коэффици 〈〉 I T C I BERNETICS Иллюстрация обр нной разметки по для которых вер ков равна 0.5, бел 0.5, черным цвето личие линейных п ustration
зового
ания
TPP – веро атывания де ки изображен ми, присваив
где P батыв варит основ
ных
ROBOTICS and

яч йных признак ае использо кции признак ой камеры мотренного ал ЕХНИЧЕСКАЯ К чета ширин стандартом й карты
ов, шаги 1 Рис. 1 илл горитма КИБЕРНЕТИКА /
linear
ции ( C ) [19]:
афирования ученных с ав едства Для к зультаты дет со всех четы роезде по тес лигон предст енной дорож а можно отне е которого бы ассматривающ
карта сумм лобальной ка ифмов вводя допустимые соответстве ы для предот ний в ячейк р, когда ав я в область в ный участок оступления пе арты инициа оответствущи орожной разм ачала картогр е или отсутст ся равноверо кольких ка 3 повторя люстрирует
verse mapping m marks map cells f them is 0.5, white icates areas in wh tures is unlikely
(1(2 9(3) ия
ятность ис тектора лин ия, значения ается значен
необх
TNP – вероятн детект оцене экспериме На следую ош детекции Дл кции получ льная карта ядром откл Полученная зна имально и м ячейках l возможе месте один отметит ячейки Иными сл каждой , соо бразом лом ости нахожд значе
ы дорожной м ГОСТ Р 51 ответствующ маным, запи дения размет ения о
TPTP
для
все шаги TECHNICAL CYB 7
ветствующим ировании
ходимо для у аментируемой ейки локально ым таким о ение вероятн рифмического ятностей
ния
стинно полож нейных приз я которых ост ние равное TN ⎞
ренны значе логар вероя где сраба ячейк левым
т на
5,
T TP log 1 ⎛
, за того, что знаки, суще и обозначают movement route ов дороги (изоб d (shown in black) 218 й и ы я ь х а с й я я ь ы о о ) Рисунок F Рисунок 5 Figure 5 Рисунок неизвест видимо вероятн Figure 6 in gray, of the pro ТаблицаTable1 TPP TNP Стан maxl minl Поро Шир Табли ства для карту (ри 4 — Необработа Figure 4 — Raw d — Совокупная о измерений в The total field inof t 6 — Результат ра ная область, чер ости, оттенками б ности наличия ли The result of the the total visibility bability of the pre are show Наилучшие под рования с обра 1 — Best fittedmodelpa Параметр ндартное откл ог бинаризац ина линии [м ица 2 содерж необработан ис. 4) и карты нные детекции, н экспертом etections mapped бласть видимост тестовом наборе view of all camera the test data set аботы алгоритма рным изображена белого цвета изо инейных признак e algorithm. The u area is shown in esence of linear fe wn in shades of w добранные парам тной моделью на arameters of the in mapping algorith модели лонение, ии, B етры] жит значения нных детекци ы (рис. 6) до нанесенные на к d by an expert ти всех камер дл е данных ras for all measure а Серым изобра а совокупная обл ображены градац ков в ячейках кар unknown area is s black, the gradati eatures in the map white метры алгоритма аблюдения nverse observatio hm Значени 1.50.50.980200.550.1 показателей ий, нанесенн орожных лин карту ля всех ements жена ласть ции рты shownionspcells а карти on ие й каче ных на ейных









расчет при бы , классами
время как C мальную корр С другой жно рассмат икации [20].
эт precision) и по точностью и отанных дете ртой, получе ки линейных п ости, при ко азметку, мы показателей ко те ячейки ли в область автомобиле му с несбала при оценке а ержащих лин е, чем содерж та тестового пол маршрут дв the test site, arro ренсная карта лин ражена черны e map of linear fea в
Упр где гор чен инд обл все тим с р так то сим мож фи кол яче тат и с кар эта руч пор сод RO ним оди нов реш воз яче ств Р F Рис Figu равление / Contr е I – карта, ритма, T – р ние, – ст дексы ячейки ласти карты, ех камер для м, что при по референсной к как она отр
личество кор еек карты Н ть точность (p сравнить их с рту необрабо
с




алонной кар чной разметк рог вероятно держащей ра OC-кривую При оценке маются толь ин раз попал вленных на а шить проблем зникающую п еек, не соде венно больше о , m всех измер будет основе результате карта, 〈〉 – с тклонение к – количест все област ений 1: zt (ри чности получ минимальна ельное разл яться 1 , пок ду картами ачу картогр адачу бинар дходе можно но классифи их данных м лноту (recal полнотой на кций (рис 4 нной путем ризнаков (ри тором ячейк также може
ражает попикс будет равн реляцию меж стороны, зад тривать как з При таком по ректно и лож На
содержащей я
е работы ал среднее зна карты, , ij во пикселей ти видимости ис. 5). Отме ченной карты а и равно 0 , личие карт, в казывая мак рафирования рной класси о рассчитать ицированных можно посчи l) алгоритма, анесенных на 4), а также с экспертной ис. 3). Меняя ка считается ем построить


олной иденти , MS




игона, стрелочки ижения ws indicate the m
П




и карты
tures of the road



камер
рые хотя
уста яет частично ми
Рисунок 2 — Карт Figure 2 — Map of сунок 3 — Рефер ure 3 — Reference rol полученная референсная тандартное







качества в карты, кото видимости Это позволя нсированным лгоритма из ейные приз ащих
ейных признако м цветом)
алгоритма. Зеле ответы алгоритм жно положительн ные

Green color show – true-negative, egative меры в перв но тем










, что растет, а точ окие, когда P ность истин ктора линейн еняемым дет ятность истин детектора P о предполага е задетектиро а не оценива 9(3) го дь, ния ль ен 5 до ков ту, ры за , не фе нее ому ро ным а, ые, s ом при но TN но ых ек но TN ем, ва ем
различных па ачества В п раметров мо афиксируем з ми значениям значения TPP им карты лине ассчитаем то имальное зна мальное MS ксельно сравн мещения отно ые показатели нным недост х параметров еляции предложенного положительные ые, белым – лож жно отрицательн oposed algorithm e algorithm, gray tive, red – false-ne значения 1F о обусловлен ие полноты р метрик высо ая вероятн ывания дете ивается прим ороны, вероя абатывания ишь косвенно в которой не свободна, а явном виде 2021;
РОБОТ призн ем пр метра сокие необр Табл Table Н м 1C MS Точ Пол 1F AU Рис Зеле алго answFigure Ан к выв филь 8 вид умень ных полож лиров мальн ТОТЕХНИКА и Т наков, получе редложенного ами Предлож е значения по работанными лица 2 — Сравне и полученной 2 — Comparisonma Название метрики П 210 S ность лнота мера UCROC сунок 7 — Необра еным цветом изо оритма, серым положительны re 7 — Raw detect ers of the algorith нализируя по воду, что пре трует ложно но, что колич ьшилось, по детекций жительных от вания простр ным распред ЕХНИЧЕСКАЯ К нных автома алгоритма енный алго казателей ка детекциями ние метрик для н карты с наилуч of metrics for raw p with the best pa редложенны алгоритм 0.690.400.160.520.510.81 ботанные детек бражены истинн истинно отрица е, красным – ло ions mapped. Gre m, gray – true-ne red – false-nega лученные ре дложенный положительн ество ложны сравнению с (рис. 7). ветов увели анственного елением КИБЕРНЕТИКА / атически с пр , с наилучши ритм имеет б ачества, в ср необработанных шими параметра w detections and t arameters ый Необрабо детек 0.70.40.60.30.10.4878285 ций, нанесенные но положительны ательные, белым ожно отрицатель een color shows t egative, white – fal ative езультаты, м алгоритм эф ные детекции ых ответов зна с картой нео Количество ичилось за с о шума дете ROBOTICS and 219 рименени ими пара более вы равнении с х детекций ами the resulting отанные кции 582878 е на карту ые ответы м – ложно ьны lrue-positivese-positive, ы пришли ффективно и На рис ачительно обработан истинно счет моде екции нор TECHNICAL CYB 9 Исследуе ритма на п рассмотрим TPP и TNP . ных параме ным в табл 0.9 , с шагом Для получен 1F меру, C – 0.51 , C тель качеств учитывая по ренсной карт подвержены при выборе вались на зн Рисунок 8 — Ре цветом изобр серым – истин Figure 8 — true-positThw На рис. 9 столбце оди увеличении сти падает меньше P положитель признаков P тором [21]. сти отрицат низкая, пото что область ны линейны «свободност BERNETICS ем влияние р оказатели ка влияние пар Для этого за етров равным 1. Изменяя з м 0.1 , получи нных карт ра C , MS Макси 0.52 Миним ва MS попик овороты и см ты. Остальны ы перечислен оптимальных начения корре езультат работы ажены истинно п но отрицательны красным – лож e result of the pro ive answers of the white – false-posit 9 видно, что з инаковы Это PTP значени Значения м PTP Высока ного срабаты TPP обеспечи С другой сто тельного сра ому что мы ли видимости, ые признаки, ть» ячейки в я
араметров ал первую очере дели измере значения оста м, представл и TNP от 0.5 ейных призна чность, полно ачения 1F ме – 0.12 Пока нивает карты осительно ре и качества ме таткам, поэт в мы ориенти


Упр Рис Fi Р для F равление / Contr сунок 10 — Граф gure 10 — Graph Рисунок 11 — Гра я обработанной а Figure 11 — mapROCp rol Рисуно Figure 9 — De фик F1, MS, C для в F1, MS, C for stan афик ROC для зн алгоритмом карто plot for binarizati ping algorithm. Th к 9 — Зависимос pendence of the v значений станда ыбранное в кач dard deviation va ачений порога б графирования on threshold valu e green circle ma сть значения 1F value of the 1F артного отклонен честве наилучшег alues from 0 selectetod бинаризации от 0 Зеленым кругом алго ues from 0 to 1 wit rks the value obta 220 меры, C , M measure, C , M ния от 0 до 3 с го значение стан 3 with a step of d as the best 0 до 1 с шагом 0.0 м обозначено зна оритмом th a step of 0.01. T ained for the origi MS от значений P MS on the values шагом 0.3 Ве ндартного отклон 0.3 . The vertical 01. Красным круг ачение, полученн The red circle mar nal data without p TNP и TPP s of TNP and TP ртикальной крас ения l red line indicates ом обозначено з ное для исходных rks the value obta processing by the TP сной линией обоз s the standard de значение, получе ых данных без об ained for the proce e algorithm значено viation енное работки essed
















































Доля истинно положительных детекций расчет до значения порога 0.55 Этот порог обозначен красным кругом на (рис. 11). После порога 0.55 увеличивает ся доля ложно положительных детекций Будем счи тать значение порога бинаризации 0.55 оптималь ным Изобразим соответствующую точку на рисунке красным кругом Построим ROC кривую для карты необработанных детекций и порога бинаризации 0.55 Значения чувствительности и специфичности для карты необработанных детекций изображены зеленым кругом Сравним значения чувствительно сти и специфичности для необработанных и обрабо танных детекций дорожной разметки при пороге 0.55 , вычислив AUCROC Значение AUCROC для необработанных детекций 0.75 , а для обрабо танных 0.81
Исследуем выполнения алгоритма кар тографирования с предложенной моделью для одно го измерения zt Для этого измерим среднее время одного измерения детектора на всем тестовом наборе измерений 1: zt Количество измерений zt составило 12496 Средняя скорость обработки одного измерения составила 0.0003 се кунды
4. A high-definition map framework for the future of automated driving / Fabian Poggenhans, Jan-Hendrik Pauls, Johannes Janosovits [et al] // 21st International IEEE Conference on Intelligent Transportation Systems (ITSC). – IEEE, 2018. – pp. 1672-1679. – DOI: 10.1109/ITSC.2018.8569929. – Text: unmediated.
3. Kibalov V. Safe Speed Control and Collision Probability Estimation Under Ego-Pose Uncertainty for Autonomous Vehicle / O. Shipitko // 23rd International IEEE Conference on Intelligent Transportation Systems (ITSC). – IEEE, 2020. – pp. 1–6. – DOI: 10.1109/ITSC45102.2020.9294531. – Text: unmediated.
Заключение В данной работе был предложен алгоритм карто графирования, с использованием обратной модели наблюдения визуального детектора линейных при знаков Исследовано влияние параметров обратной мо дели наблюдения визуального детектора на резуль тирующую карту Результат алгоритма оценивался относительно карты необработанных детекций Для этого рассчитывались как классические для карто графирования метрики (корреляция полученной и эталонной карты, оценка карты), так и метрики би нарной классификации ( 1F мера, AUCROC ), в виде которой может быть представлена задача кар тографирования Предложенный алгоритм позволил улучшить все рассматриваемые показатели качества на тестовом наборе данных Время обработки одного измерения визуального детектора составило 0.0003 секунды, что подтвер ждает возможность применения алгоритма карто графирования для построения карт в реальном вре мени Карту, полученную в результате работы алгорит ма, можно векторизовать и использовать в качестве цифровой карты для позиционирования высокоавто матизированного транспортного средства Периоди ческое обновление цифровой карты позволит под Intelligent Transportation Systems (ITSC). – IEEE, 2014. – pp. 1442-1448. – DOI: 10.1109/ITSC.2014.6957889. – Text: unmediated.
держивать актуальную версию, соответственно уве личит точность позиционирования Впоследствии предложенный алгоритм может быть расширен для учета других семантических признаков дорожного полотна Литература 1. Система позиционирования внутри зданий мобильной робототехнической платформы на основе детек ции краев / М П Абрамов, О С Шипитько, А С Лукоянов [и др.] // Сенсорные системы. — 2019. — № 33(1). — С. 30-43. — DOI: 10.1134/S0235009219010025. – Текст: непосредственный 2. A path planning algorithm based on fusing lane and obstacle map / Hao Zhu, Mengyin Fu,Yi Yang [et al] // 17th International IEEE Conference on
скорость
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 221 Исследуем также влияние стандартного отклоне ния нормального распределения, моделирующего пространственный шум детекции на показатели ка чества Зафиксируем остальные параметры на зна чениях из табл. 1 (включая найденные в предыду щем эксперименте значения параметров TNP и TPP ). Будем изменять значение стандартного отклонения от 0 до 3 , с шагом 0.3 По мере увеличения пропорционально увели чивается полнота, и уменьшается точность За счет этого значения 1F меры не меняются (рис. 10). Это объясняется эффектом размытия Задетектирован ные линейные признаки часто находятся рядом с референсной траекторией, за счет размытия филь тром Гаусса задетектированной разметки, уменьша ется количество ложно отрицательных срабатыва ний и растет количество ложно положительных сра батываний Исследуем влияние порога бинаризации B на показатели качества. Для этого будем при прочих фиксированных параметрах изменять порог бинари зации от 0 до 1 с шагом 0.01 и рассчитывать пока затели точность и полноту Полученные значения нанесем на ROC-кривую (рис. 11).
картографирования
References
5. Ground Vehicle Standard J3016_201609. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. – 2014. – vol. 3016. – pp. 1-16.
7. Elfes A. Occupancy grids: A probabilistic framework for robot perception and navigation dissertation … Ph.D. in Electrical and Computing Engineering / Alberto Elfes; Carnegie Mellon University. – Pitsburgh, 1991. – Text: unmediated.
Управление / Control 222
14. Konrad M. Localization in digital maps for road course estimation using grid maps / M. Konrad, D. Nuss, K. Dietmayer // 2012 IEEE Intelligent Vehicles Symposium. – IEEE, 2012. – pp. 87-92. – Text: unmediated.
10. Thrun S. Learning occupancy grid maps with forward sensor models / S. Thrun // Autonomous robots. – 2003. –vol. 15. – pp. 111-127. – DOI: 10.1023/A:1025584807625 – Text: unmediated.
12. Korthals T. Towards inverse sensor mapping in agriculture / T. Korthals, M. Kragh, P. Christiansen, U. Rückert // arXiv preprint arXiv:1805.08595. – 2018 (дата обращения: 15.07.2021). – Text: electronic.
8. Moravec H.P. Sensor fusion in certainty grids for mobile robots / H.P. Moravec // Sensor devices and systems for robotics. – Springer, Berlin, Heidelberg, 1989. – pp. 253-276. – DOI: 10.1007/978-3-642-74567-6_19. – Text: unmediated.
15. ГОСТ Р 51256-2018. Технические средства организации дорожного движения Разметка дорожная Клас сификация Технические требования = Traffic control devices. Road marking. Classification. Technical requirements : национальный стандарт Российской Федерации : издание официальное : утвержден и введен в действие Прика зом Федерального агентства по техническому регулированию и метрологии от 20 февраля 2018 г. N 81-ст : вве ден взамен ГОСТ Р 51256-2011 : дата введения 2018-06-01 / разработан Обществом с ограниченной ответ ственностью «Центр инженерно технических ( дорожного движения» и ТК 418 «До хозяйство». – АО «Кодекс». – URL: https://docs.cntd.ru/document/1200158480 (дата обращения 15.07.2021). Текст: электронный E. И оконного преобразования Хафа для поиска протяженных границ на изображении / E. И. Панфилова, И. А. Кунина // Сенсорные системы. – 2020. – т. 34. – № 4. – С. 247–261. DOI: 10.31857/S0235009220030075. – Текст: непосредственный
исследований «Дорконтроль»
16. Панфилова
ООО «ЦИТИ «Дорконтроль») : вне сен техническими комитетами по стандартизации ТК 278 «Безопасность
17. Algorithm for computer control of a digital plotter / J.E. Bresenham // IBM Systems journal. – 1965. – vol. 4. – № 1. – pp. 25-30. – Text: unmediated.
21.unmediated.PanfilovaE. Fast Hough transform-based road markings detection for autonomous vehicle / E. Panfilova, O. Shipitko, I. Kunina // Thirteenth International Conference on Machine Vision: Proceedings. – Vol. 11605; 2021. – DOI: 10.1117/12.2587615 (accessed: 15.07.2021). – Text: electronic.
6. Automated Annotation of Lane Markings Using LIDAR and Odometry / Javier Barandiarán, Marcos Nieto, Andoni Cortes [et al] // IEEE Transactions on Intelligent Transportation Systems (IEEE T INTELL TRANSP). – 2020. – pp. 1-11. – DOI: 10.1109/TITS.2020.3031921. – Text: unmediated.
11. Thrun S. Learning occupancy grids with forward models / S. Thrun // Proceedings. 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180). – IEEE, 2001. – vol. 3. – pp. – Text: unmediated.
рожное
20. Kim S. Building occupancy maps with a mixture of Gaussian processes / S. Kim, J. Kim // 2012 IEEE International Conference on Robotics and Automation. – IEEE, 2012. – pp. 4756-4761. – DOI: 10.1109/ICRA.2012.6225355. –Text:
18. Collins T. Occupancy grid mapping: An empirical evaluation / T. Collins, J.J. Collins, D. Ryan // 2007 Mediterranean Conference on Control & Automation. – IEEE, 2007. – С. 1-6. – DOI: 10.1109/MED.2007.4433772. – Text: unmediated.19. Martin M. C. Robot Evidence Grids / M.C. Martin, H.P. Moravec. — Pittsburgh : The Robotics Institute Carnegie Mellon University, 1996. — Text: unmediated.
9. Moravec H. High resolution maps from wide angle sonar / H. Moravec, A. Elfes // Proceedings.1985 IEEE international conference on robotics and automation. – 1985. – vol. 2. – pp. 116-121. – DOI: 10.1109/ROBOT.1985.1087316. – Text: unmediated.
–
13. Video based localization for bertha / J. Ziegler, H. Lategahn, M. Schreiber // 2014 IEEE Intelligent Vehicles Symposium Proceedings. – IEEE, 2014. – pp. 1231-1238. – Text: unmediated.
Использование
1. Abramov, M.P. et al., 2019. Sistema pozitsionirovaniya vnutri zdaniy mobil'noy robototekhnicheskoy platformy na osnove detektsii kraev [Positioning system inside buildings of a mobile robotic platform based on edge detection]. Sensory Systems, 33(1), p.30-43. DOI: 10.1134/S0235009219010025. (in Russian).
Информация об авторах Шипитько Олег Cергеевич, Институт проблем передачи информации им А А Харкевича Российской академии наук (ИППИ РАН), м.н.с., 127051, Москва, Большой Каретный переулок, д. 19, стр. 1, тел.: +7(964)509-27-21, shipitko@visillect.com
9. Moravec, H. and Elfes, A., 1985. High resolution maps from wide angle sonar. In: Proceedings of IEEE international conference on robotics and automation, v.2, pp.116-121. DOI: 10.1109/ROBOT.1985.1087316.
Occupancy grids: A probabilistic framework for robot perception and navigation. Ph.D. in Electrical and Computing Engineering. Carnegie Mellon University, Pitsburgh.
6. Barandiarán, J. et al., 2020. Automated Annotation of Lane Markings Using LIDAR and Odometry. IEEE Transactions on Intelligent Transportation Systems (IEEE T INTELL TRANSP), pp.1-11. DOI: 10.1109/TITS.2020.3031921.7.Elfes,A.,1991.
16. Panfilova, E.I. and Kunina, I.A., 2020. Ispol'zovanie okonnogo preobrazovaniya Khafa dlya poiska protyazhennykh granits na izobrazhenii [Using the Hough window transform to find extended boundaries in an image]. Sensory Systems, 34(4), pp.247–261. (in Russian).
11. Thrun, S., 2001. Learning occupancy grids with forward models. In: Proceedings of 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium, v. 3.
Ground Vehicle Standard J3016_201609. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Pp.1-16.
18. Collins, T., Collins, J.J. and Ryan, D., 2007. Occupancy grid mapping: An empirical evaluation. In: Proceedings of 2007 Mediterranean Conference on Control & Automation IEEE, pp.1-6. DOI: 10.1109/MED.2007.4433772.
O., 2020. Safe speed control and collision probability estimation under ego-pose uncertainty for autonomous vehicle. In: Proceedings of 23rd International IEEE Conference on Intelligent Transportation Systems (ITSC), pp.1–6. DOI: 10.1109/ITSC45102.2020.9294531.
19. Martin, M.C. and Moravec, H.P., 1996. Robot Evidence Grids. Pittsburgh: The Robotics Institute Carnegie Mellon University.
21. Panfilova, E., Shipitko, O. and Kunina, I., 2021. Fast Hough transform-based road markings detection for autonomous vehicle. In: Thirteenth International Conference on Machine Vision: Proceedings, v.11605. DOI: 10.1117/12.2587615.
13. Ziegler, J., Lategahn, H. and Schreiber, M., 2014. Video based localization for bertha. In: IEEE Intelligent Vehicles Symposium Proceedings, pp.1231-1238.
14. Konrad, M., Nuss, D. and Dietmayer, K., 2012. Localization in digital maps for road course estimation using grid maps. In: 2012 IEEE Intelligent Vehicles Symposium, pp.87-92.
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 223
2. Hao Zhu et al., 2014. A path planning algorithm based on fusing lane and obstacle map. In: Proceedings of 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), pp.1442-1448. DOI: 10.1109/ITSC.2014.6957889.3.Kibalov,V.andShipit’ko,
12. Korthals, T., Kragh, M., Christiansen, P. and Rückert, U., 2018. Towards inverse sensor mapping in agriculture. arXiv preprint, 1805.08595.
4. Poggenhans, F. et al., 2018. A high-definition map framework for the future of automated driving. In: Proceedings of 21st International IEEE Conference on Intelligent Transportation Systems (ITSC), pp.1672-1679. DOI: 10.1109/ITSC.2018.8569929.5.SAEInternational,2014.
8. Moravec, H.P., 1989. Sensor fusion in certainty grids for mobile robots. In: Sensor devices and systems for robotics. Berlin: Springer, Heidelberg, pp.253-276. DOI: 10.1007/978-3-642-74567-6_19.
17. Bresenham, J.E., 1965. Algorithm for computer control of a digital plotter. IBM Systems journal, 4(1), pp.2530.
20. Kim, S. and Kim J. Building occupancy maps with a mixture of Gaussian processes. In: 2012 IEEE International Conference on Robotics and Automation, pp.4756-4761. DOI: 10.1109/ICRA.2012.6225355.
15. 2018. GOST R 51256-2018. Tekhnicheskie sredstva organizatsii dorozhnogo dvizheniya. Razmetka dorozhnaya. Klassifikatsiya. Tekhnicheskie trebovaniya [Russian National State Standard R 51256-2018. Traffic control devices. Road marking. Classification. Technical requirements]. Available at: <https://docs.cntd.ru/document/ 1200158480> [Accessed 15 July 2021].
10. Thrun, S., 2003. Learning occupancy grid maps with forward sensor models. Autonomous robots, 15, pp.111127. DOI: 10.1023/A:1025584807625.
Anatoly E. Kabakov, Kharkevich Institute, Intern Research Scientist, 19-1, Bolshoy Karetny per., Moscow, 127051, Russia, tel.: +7(985)305-94-62, kabakov@visillect.com тут робототехники и технической кибернетики» (ГНЦ РФ ЦНИИ РТК) состоялась 32-я международная конференция «Экстремальная робототехника» («ЭР 2021»).
Управление / Control 224 Кабаков Анатолий Евгеньевич, ИППИ РАН, стажер исследователь, 127051, Москва, Большой Каретный переулок, д. 19, стр. 1, тел.: +7(985)305-94-62, kabakov@visillect.com
обсудили акту альные вопросы посвященные стандартизации в об ласти робототехники На заключительном Пленарном заседании, пред седатели секций «ЭР-2021» подвели итоги, отчитав шись о количестве, качестве и научной новизне представленных докладов Выступая с заключительным словом, директор главный конструктор ГНЦ РФ ЦНИИ РТК А В Лопота поблагодарил всех участников за то, что смогли при ехать на конференцию в Санкт Петербург, отметил, что высказанные замечания и предложения будут учтены при подготовке очередной конференции
Information about the authors
Конференция объединила на своей площадке более 200 участников: ведущих российских ученых в области робототехники, представителей бизнеса и научно образовательного сообщества, молодых уче ных, аспирантов и студентов старших курсов веду щих технических вузов страны На симпозиуме «Сервисная робототехника» было заслушано 49 докладов: в первый день (28 сентября) – 25, во второй день (29 сентября) – 24 доклада В мероприятии приняло участие более 100 человек Председателем симпозиума отдельно ре комендовано к опубликованию в Сборнике трудов конференции и/или научно к публикации в журнале большой интерес был проявлен участни ками к симпозиуму «Искусственный интеллект в экс тремальной робототехнике», в ходе которого было заслушано без малого 20 докладов В ходе проведения закрытого круглого стола «Морская робототехника» было представлено 17 докладов, 4 из которых рекомендованы к опублико ванию в научно техническом журнале «Робототехни ка и техническая кибернетика». В мероприятии при няло участие 40 человек В семинаре «Роботизация атомной отрасли» приняли участие более 20 человек На заседании Технического комитета по стандар тизации ТК-141 «Робототехника» секретариат отчи тался о результатах за 2020 год, текущей работе в 2021 году, а также о работе, проводимой совместно с ТК-299 и ТК-45. Участники заседания
Также
Информация 32-я международная научно техническая конференция «ЭКСТРЕМАЛЬНАЯ РОБОТОТЕХНИКА» 3-4 июня 2021 г в Санкт Петербурге (Тихорецкий пр. 21) на базе ГНЦ РФ «Центральный научно исследовательский и опытно конструкторский инсти
Oleg S. Shipit’ko, Institute for Information Transmission Problems of the Russian Academy of Sciences (Kharkevich Institute), Junior Research Scientist, 19-1, Bolshoy Karetny per., Moscow, 127051, Russia, tel.: +7(964)509-27-21, shipitko@visillect.com
техническом журнале «Робототехника и техническая кибернетика» 11 до кладов В семинаре «Космическая робототехника» при няли участие более 25 человек, было представлено 12 докладов, 3 из которых рекомендованы к опубли кованию в научно техническом журнале «Робототех ника и техническая кибернетика», включенном в базу данных Russian Science Citation Index (RSCI) на платформе Web of Science. В симпозиуме «Наземная робототехника» были представлены около 30 докладов, девять из которых рекомендованы
модуля
сти ав ния п стран
об изменени
скаемого
с
средс
отация П потребует рол виях Предме решения принятия моделиро Пока при организаци прототип описаны о дований Росс ереход к пи зучения вопр и и возможн т исследован нения полет й посадки сп ия человеко итуационной енного реаги лось виртуал беспечения поддержания дности прогн ереходе от решения в поверхность вания и визу зано, что пр контроле вн и визуальной ов в классах аналогичные рованию пос ы перспекти применения ьтатов не о ожения в об ыгодно отлич вертолетно уального про анственно си цели заклю я виртуальн при посадке пераций КИБЕРНЕТИКА / 04.414.32+62
рых
оды к модели й рассмотрен е прецеденты ченных резул т иметь прил сполнение в ых аппаратах зование вирт шения простр поставленной для построени ной ситуации ии полетных о ЕХНИЧЕСКАЯ К тки .01+519.6+00J.9308 прототипи ия простр М . сударственн
о п ки и
ния
е
Глоб» ся
на
также
ирование с ранственно при посад
РОБОТ УДК DOI:: 1 C. 225 Вир дл 1 Ф си с

9(3)
ы
я на ет ых ра но ле ро ло ью ин ия нки ри од ли ния лун зу Во ны для ые бо , а ния , а Та ре Ис тов же ва не ной
навтов
смонавтов
ых помех
м
задачами оения компью риантов трен ношении без я этапа поса осведомленн лесообразнос ия, воссозда дуля, как одн TECHNICAL CYB 5 1.83 изуализац ационной о нную повер Крючков 2 , й научный цен « ФНЦ Научно йская Федера ц е нтр подгото в а »), Москва , Р кцию 16 июня 2 0 осле запусков ых миссий дл посадке спус моделирован зучения сост ля с возможно и места поса матривается в возникновени тапа посадки нении услови ционной осве айоне посадк в режим руч и существенн х анализ Сф ого прототипи ния в условия пециальных с информацио отных аппара ятельности Э ях нарушени е синтеза 2D видения в оп проектирова ютерных трен нировок чело опасности и адки на Луну ности космон сти применен ющего услов ной из наибо BERNETICS ии спускае осведомле рхность В . М . Усов 2 тр Научно ис с исследовате л ц ия , mix@niisi. в ки космонавт о оссийская Фе д 0 21 года ) в автоматиче ля
к ий институт ут системны х Гагарина » ий серии «Лу редь, потребу в усложненн юдаемого опе ения безопас режим управ беспечение п зательное ус ии Цель Цел собенностей Методолог еменной оце ловием для п ом качество п особов визуа ния примене спускаемого л возможных ви поддержки еловека изуче а и посадки, ировать базов озросших тре мических сцен асть примене ловек техника космонавтов оделях и на Заключение поиск вариан нтексте дости ого моделиро смонавтом в пасности лун
услов
илотируемым росов безопа ностей космо ния составляю ной операции пускаемого лу м решения о й осведомлен ирования опе льное протип космонавтов я пространств нозируемой п автоматическ сжатые врем ь Луны Резул уализации дл ринятие чело нешней сред й среды в соо х пилотируем е виды опера садки аппара ивные подход я систем син граничиваетс ласти постро чается от ва го типа в отн отипирования итуационной чается в цел ного окружен е лунны при модул нности рассм ератора на в пирование эт в при усложн венно ситуац лощадки в ра кого режима менные сроки льтаты и их ля виртуально веком решен ы требует сп ответствии с ых и беспило аторской дея атов в услови ды на основе тетического ся экипажа В лунн и визуали вопро остью перехо лунного этом контек нестандарт Луну для ий визуально едомленности ки является к ного управле о зависит от формулирован ирования эта ях дефицита средств инфо онными потре атов вертикал Это позволил я видимости D и 3D-визуал писанных усл ания сложных нажеров для овека на полу гибкости мод у позволяет авта Общий ния методов вия принятия олее критичны
емого лунн енности кос 2 с ледовательс к л ьский инсти т ras.ru ов имени Ю А д ерация еских станци В первую очер ного модуля изации наблю осы обеспеч ода в ручной о модуля Об ксте, как обя тной ситуаци я изучения ос ого контроля и для своевр ключевым усл ения При это принятых сп ны направле апа посадки с времени и в ормационной ебностями че льного взлета ло сформули С учетом во льных динам ловиях Обла х систем чел подготовки к унатурных м дификации З расширить п й вывод в кон имитационно решения кос ых для безоп
2021;
может кое и альны польз улучш ния п ния д штатн мисси ТОТЕХНИКА и Т Разрабо 51629.78+533.60.31776/RTC-233 ртуальное ля улучшен Ф едеральное г о темных иссл е 2 ФГБУ « Науч н
авляют
лунного мод ROBOTICS and 225 2-50+629.7.05 системы в ой и ситуа дке на лун юк 1 , Б . И . « Федеральны ии наук » ( ФГУ Москва , Росси т ательный ц е и Ю А Гагарин поступил в ред а полетам по асности
Анно Акту ут тором вие д иссле форм Анали опера нятия готов зации ного альны просы учет котор подхо ваний получ
м хода выпол втоматическо после принят нственной и с для своеврем едования яви мационного о из способов атором приго я
п ют средства и. Область и унного
и исслед о о исследова т ( ФГБУ « Н
том
в
уальность
адки
ного модул
и очнение
В . Михайл ю о е учреждение и йской академ о ваний РАН »), ельский испы т ИИ ЦПК имени ( Материал
»
и посадки на ств
Key words Lunar exploration, lunar lander, landing simulation and visualization, virtual activity environment, unmanned and manned vertical take-off and landing vehicles, spatial and situational awareness, synthetic vision systems. Введение Методы компьютерного моделирования деятель ности космонавтов составляют важную часть совре менной практики разработки способов человеко машинного взаимодействия применительно к управ лению сложными автоматизированными комплекса ми Применительно к перспективным пилотируемым миссиям эти методы могут применяться на этапе прототипирования деятельности космонавтов при выполнении одного из самых ответственных этапов
2
1
(Received 16 June 2021)
Abstract
Mikhail V. Mikhaylyuk , Boris I. Kryuchkov 2 , Vitaly M. Usov 2 Scientific Research Institute for System Analysis of the Ru ssian Academy of Sciences, Moscow, Russia, mix@niisi.ras.ru Federal State Organization «Yu.A. Gagarin Research & Test Cosmonaut Training Center» (GCTC), Moscow, Russia
Relevance. The transition to manned flights after the launches of the automatic stations of the «Luna-Globus» series will require studying issues of the crew safety in lunar missions. First of all, it will be necessary to clarify the role and capabilities of cosmonauts when landing the lunar module in complicated conditions. The subject of the study is the means of modeling and visualizing the progress of the flight operation observed by the operator. The area of study is the issues of ensuring the safety of the automatic landing of the lunar descent module with the possibility of switching to manual control mode after a decision was made by a human to change the landing site of the lunar module. The provision of spatial and situational awareness is considered in this context as a prerequisite for the timely response of the operator to the occurrence of a non-standard situation. Objective. The goal of the work is to present the virtual prototyping of the Moon landing stage for studying details of information support for cosmonauts during the conditions of visual control complication. Methodology. The analysis of ways to maintain spatial and situational awareness for a timely assessment by the operator of the suitability of the predicted site in the landing area is a key condition for deciding whether to switch from automatic mode to manual mode. At the same time, the quality of preparation and decision-making in a short time frame significantly depends on the accepted methods of visualizing the landing on the surface of the Moon. Results and Discussion. The directions of application of modeling and visualization tools for virtual prototyping of the landing of the descent lunar module are formulated. It is shown that a person's decisionmaking in conditions of time scarcity and possible visual interference when monitoring the external environment requires special means of information support. The issues of organizing the visual environment in accordance with the information needs of a person are studied taking into account the prototypes in the classes of manned and unmanned vertical take-off and landing vehicles, for which similar types of operator activities are described. This made it possible to formulate basic approaches to modeling the landing of vehicles in conditions of problems with visual perceptions. Taking into account the increased requirements, we consider promising approaches based on the synthesis of 2D and 3D-visual dynamic scenes, as well as precedents for the use of synthetic vision systems in the described conditions. The scope of application of the obtained results is not limited to the tasks of designing complex human-technical systems, but may have applications in the field of building computer simulators for the training of cosmonauts. This practice compares favorably with the options for human training on hardware-in-the-loop simulation models and on real helicopter-type vehicles in terms of safety and flexibility of modification. Conclusion. The use of virtual prototyping of the moon landing makes it possible to expand the search for options for improving the cosmonaut's spatial and situational awareness. The general conclusion in the context of this goal pursuing is the feasibility of using simulation methods to build a virtual environment that recreates the conditions for a cosmonaut to make a decision in an emergency situation when landing a lunar module, as one of the most critical flight operations for the safety of lunar missions.
Virtual prototyping of the lunar module landing system to improve cosmonauts’ spatial and situational awareness
1
Разработки / Developments 226 Ключевые слова Освоение Луны, спускаемый лунный модуль, моделирование и визуализация посадки, виртуальная среда дея тельности, беспилотные и пилотируемые аппараты вертикального взлета и посадки, пространственная и ситуа ционная осведомленность, системы синтетического видения
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 227 лунной миссии – посадки пилотируемого спускаемого лунного модуля (СЛМ) на поверхность Луны при схо де с лунной орбиты Данный этап может выполнять ся в автоматическом режиме посадки СЛМ, анало гично беспилотному варианту лунного модуля, когда прогнозируемое место посадки отвечает заранее отработанным требованиям к посадочной площадке Эти требования формируются на основе изучения космонавтами электронных карт лунной поверхности, но при условии, что экипаж должен владеть приема ми выполнения визуальной оценки внешней среды в реальных условиях наблюдения за ограниченное время, отводимое на выполнение спуска СЛМ с лун ной орбиты При этом надо принимать во внимание высокий риск возникновения трудно устранимых по мех в виде облака лунной пыли от работы реактив ных посадочных двигателей, что проявляется с неко торой высоты снижения и удаленности СЛМ от по верхности Луны После этого неблагоприятного со бытия (появления помех в поле зрения иллюминато ра СЛМ) – прямой визуальный контроль поверхности в районе посадки или затруднен, или полностью ис ключен Из нормативных требований к пилотирова нию в наземных условиях аппаратов вертикального взлета/посадки с режимом зависания известно, что продолжать снижение и производить посадку на та ких аппаратах разрешено только при постоянном визуальном контакте с наземными ориентирами Аналогичные требования выдвигаются при осу ществлении посадки беспилотных аппаратов опера торами наземных пунктов управления Есть основа ния полагать, что такие же требования будут предъ являться к деятельности космонавтов при ручном управлении спуском и посадкой СЛМ Визуальный контроль необходим при принятии решений членами экипажа в случае нестандартного развития событий, например, потери видимости из за возникших помех, поскольку к деятельности кос монавтов предъявляются повышенные требования по обеспечению безопасности полета В нештатной ситуации человек оператор (ЧО) должен выступать резервирующим звеном для автоматических устройств в силу своих когнитивных способностей принимать решения о пригодности/непригодности прогнозируемого места посадки СЛМ с учетом слож ного рельефа местности и при наличии помех Одна ко при этом необходимо принимать во внимание и возможные ограничения человеческого звена, в первую очередь связанные с недостаточной про странственной и ситуационной осведомленностью (ПСО) человека, ответственного за принятие реше ния С этим связана актуальность отработки спосо бов информационного обеспечения процесса пило тирования, построения информационно управляющего поля СЛМ и выбора способа визуали зации внешней обстановки для непрерывного наблюдения космонавтами внешней среды в про цессе посадки В этой связи возникает необходимость выявле ния существующих аналогов аппаратов, применение которых требует от ЧО решения аналогичных по со ставу деятельности задач в сравнении с пилотиро ванием и посадкой СЛМ, а также способов построе ния виртуального окружения, в котором актуализи руются когнитивные процессы оценки обстановки и реализуются механизмы принятия решений Целью исследования явилось изучение особен ностей деятельности космонавтов во время спуска пилотируемого СЛМ Основное внимание обращено на моделирование наиболее значимого по критерию безопасности этапа принятия решения о выборе подходящей площадки посадки по результатам визу ального контроля обстановки и с учетом данных дат чиковых систем о движении СЛМ (траекторных па раметрах – скорости снижения, удаленности от по верхности, ориентации в пространстве, запасе топ лива и др.). Данная проблема исследована с позиций выявления особенностей человеко машинного взаи модействия при контроле автономных мобильных роботов в дистанционном режиме Методика моделирования системы посадки спускаемого аппарата на Луну на базе построения виртуального окружения и 3Dвизуализации внешней визуальной обстановки Для эргономического проектирования средств информационного обеспечения членов экипажа на СЛМ сделан выбор в пользу методов компьютерного моделирования и 3D-визуализации на базе техноло гий виртуальной реальности Применение этого под хода способствует правильному выбору рациональ ных способов человеко машинного взаимодействия с учетом психофизиологических возможностей приня тия решений в нестандартной ситуации при угрозе развития нештатной ситуации В число прототипов включены беспилотные летательные аппараты (БЛА), контроль посадки которых в заранее заданный район ЧО выполняет в дистанционном режиме с ис пользованием разных типов индикаторов в зависи мости от способов управления В качестве аналогов и прототипов для разраба тываемой структуры исследовательских моделиру ющих комплексов (англ.: Research Simulation Complexes – RSCs) с использованием технологий виртуальной реальности (VR-технологий) выступают: 1. Современные космические тренажеры, постро енные на базе VR-технологий, используемые в каче стве технических средств подготовки космонавтов 2. Компьютерные полунатурные стенды (постро енные на базе VR-технологий в комбинации с эле ментами реального объекта) для эргономического проектирования человеко машинного интерфейса и
элементов
бортового оборудования СЛМ (измеритель ные приборы, датчики, приборы наведения и навига ции и др.) будут зависеть от базовой конструкции и заданной траектории полета Результаты и их обсуждение В работе рассматривается реализация метода виртуального прототипирования с помощью разрабо танной системы виртуального окружения (СВО) [1, 2]. На рис. 1 представлены иллюстрации, демон стрирующие возможности системы виртуального окружения VirSim для решения задач моделирования и визуализации сложных динамических сцен Применение системы VirSim предполагает вы полнение определенной последовательности этапов, для которых принимаются следующие допущения 1. Конкретизируется схема полета на Луну Су ществует несколько различных схем полета пилоти руемого космического комплекса (ПКК) к Луне Наиболее известна схема полета по программе Apollo, а новые данные НАСА отражены в источнике [3]. В докладе сосредоточено внимание на заверша ющих этапах подлета ПКК к Луне; торможении и пе реходе ПКК на окололунную орбиту; стыков ке/расстыковке модулей ПКК, а также, в основном, на спуске лунного модуля на поверхность Луны Ука занные этапы предполагается моделировать в авто матическом режиме, предусматривая ручное управ ление при возникновении нештатных ситуаций в си стеме виртуального окружения 2. Создаются следующие модели в стандарте требований к компонентам такой системы: 3D-модели, в определенном диапазоне раз меров и вариаций
ских
взаимодействия (англ.: Human Machine Interface and Interaction – HRI2). результатам литературного анализа ранее вы полненных полетов и с учетом современных разрабо ток проектов лунных программ рассматривается как критически важный этап ручной посадки на Луну Со гласно текущим планам вначале предполагается вы полнять автоматический спуск с лунной орбиты бес пилотных аппаратов с доставкой на Луну роботов В последующем доставка экипажа на Луну, по всей ви димости, потребует выполнять посадку СЛМ при ак тивном контроле автоматики со стороны ЧО С точки зрения учета человеческого фактора, особенностями данного этапа является наличие ря да условий, затрудняющих подготовку принятия ре шения: быстротечность (жесткие временные лимиты на принятие решения), риски соударения с объекта ми на поверхности (сложный рельеф поверхности), нарушения условий обзора поверхности при пыле вом облаке от работы двигателей, трудности оценки относительного размера наблюдаемых объектов из за однообразия их формы, а также из за возникаю щих у космонавтов гипогравитационных нарушений сенсорных и моторных функций В современной трактовке проблем организации человеко машинного взаимодействия это означает необходимость улучшения ПСО оператора для свое временного опознания отклонений от номинальных параметров полета и идентификации зоны посадки на предмет пригодности Для этого в эргономических моделирующих экспериментах потребуется придать системе управления спуском с орбиты такие харак теристики, при которых человек может реализовать не только свои навыки ручного управления спуском, но и свои когнитивные возможности для оценки бла гоприятности складывающихся условий посадки. В первую очередь, речь идет о средствах визуализа ции окружающей среды с применением VRтехнологии Методы построения человеко машинного интер фейса и расположения конструктивных , с возможностью задания их динамиче параметров (массы, тензоры инерции, силы тяги и режимы работы двигателей и др.), а также пара метров среды моделирования; например, в системе трехмерного моделирования 3ds Max можно с помо щью плагинов создать новые типы объектов, в дан ном случае объекты «центр масс», «реактивный дви гатель» и др., с соответствующими им параметрами Для моделей реактивных двигателей можно задать такие параметры, как максимальная сила тяги, время непрерывной работы, минимальная продолжитель ность одного включения, длительность паузы между включениями и т д На рис. 1а показана модель лун ной поверхности; модели пультов управления для ручного управления полетом, а также функциональные схе мы вычисления управляющих сигналов, соответ ствующих управляющим воздействиям ЧО; модели датчиков (бортового радиолокатора, позиции и ори ентации, линейной и вращательной скорости, щупов касания с поверхностью Луны и др.); для создания пультов управления и функциональных схем преду смотрены специальные
Разработки / Developments 228
По
редакторы; на рис. 1б пока зан фрагмент функциональной схемы вычисления управляющих сигналов для реактивных двигателей, соответствующих воздействиям оператора на эле менты пульта управления 3. Обеспечивается расчет динамики управляе мых объектов виртуальной сцены в масштабе ре ального времени на основе их динамических харак теристик и управляющих сигналов, поступающих из функциональной схемы; при этом, естественно, про изводится обработка коллизий (столкновений) объ ектов Для моделирования работы реактивного дви гателя используются такие параметры, как макси мальная сила тяги, расход топлива, скорость истече ния газов из сопла, время непрерывной работы, ми нимальная и максимальная продолжительность од
двигателей П игатель созд нии всей его ризуется крат й, которая за делировании режим рассм 1 / FmaxtFt , двигателя, льными вклю азывается ко в системе упр ых двигателе ля уменьше шить с коэф ль будет соз сил тяги от в новые скоро ве его ма




адочного мод






и показана мод ой поверхност ние контрастн местности и 9(3) ри ает ра ко да ди ат где t –че эф ав й с ния фи да сех сти сс уля зуа ре го то ное ых би од ЛМ ели ью ЧО ме лах по ако ого сти ен ени ло ция ной ло чие из ель и. ых зон











ование мод ъектов с шест а позволять и боковому с тимых преде ленности от пылевое обл ть экстренн нтроля точно зуальной ори ости и врем епригодной п я визуализа наличие гор ратеров со ск о 300 м; нали ие прямых



РОБОТ ного др З котор ном р Рисун Figu ТОТЕХНИКА и Т включения, п Здесь рассма рые могут ра режимах. нок 1 — Скриншо ure 1 — Screensh ЕХНИЧЕСКАЯ К ауза между триваются д ботать в неп а) б) в) г) ты системы вир ots of the virtual e КИБЕРНЕТИКА / двумя включ двигатели ма прерывном и туального окруж environment syste ROBOTICS and 229 чениями и алой тяги, и импульс жения VirSim em VirSim TECHNICAL CYB 9 4. Задаю непрерывно максимальн боты. Импу временными ется систем намики реак ривается ка 1t – продол время межд ниями Отно фициентом ления. В не помощью у расхода топ циентом 0 вать тягу F реактивных космическог инерционны На рис во время ве 1. Обес лизация про ального вре портовом и 2. Пред матического место посад двигателей, лизации и держания ск над поверхн 3. Обес ручного упр степенями с выполнять м щению от г по запасу т верхности, п от работы д 4. Обес включения Ч выбора мес тировки по реагировани щадки для п 5. Обес сложного р местности с нами до 40 относительн вилистых бо посадочного 6. Обес по степени BERNETICS ются режимы ом режиме ую тягу Fmax ульсный реж и включениям мой управлен ктивного дви к непрерывны лжительность ду его двумя п ошение заполнения и екоторых типа управления з плива тягу м 1 k То kFmax П двигателей в го аппарата ых характерис 1в показана ртикального печивается оцессов упра емени в мон мультиэкранн усматриваетс о наведения дки: работа о двигателей посадки; реж корости, авто ностью Луны и печивается равления дви свободы, кот маневр по вы лиссады спу топлива и с при которой н вигателей печивается ЧО в управле та посадки н ориентирам ия при обна посадки печивается рельефа пов с большим кол град и диаме но гладких мо орозд и др.); о модуля на м спечивается освещенност ы работы д работы дви на протяжен жим характер ми с частото ния При мод игателя этот ый с тягой F ь включения последовате 1 /1 tt на и задается в ах реактивны заслонкой д можно уменьш огда двигател После учета вычисляются а на осно стик модель поса спуска высокореали вления СЛМ о- и стереор ном варианта ся несколько СЛМ на зара основных и в системы ори жимов автом оматического и т д

реалистична верхности (н оличеством кр етром от 2 до орей; наличи на рис. 1г п модели лунно представлен ти участков м 2021;
функциониро ижением объ торая должна ысоте, курсу и уска в допуст учетом удал не возникает
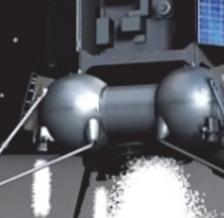



возможност ение СЛМ, ко на основе виз на поверхно аружении не



истичная виз в масштабе режимах, мно ах о режимов ав анее выбран спомогательн иентации, ста атического п зависания С







Разработки / Developments 230 плохой освещенности (на поверхности и в кратерах), затрудняющих визуальную оценку истинных разме ров объектов и образований на поверхности 7. Предусматривается возможность 3Dпредставления на мониторе рабочего места опера торов плоских изображений подстилающей поверх ности В последнем случае речь идет о проекте воссо здать высоту и текстуру реальных местностей лунно го ландшафта по глиссаде прилунения СЛМ с тем, чтобы облегчить для человека оператора оценку степени риска посадки в конкретный регион и на кон кретную площадку Для решения этой задачи необходимо привлече ние методов построения и обучения нейросети на основе реальных изображений различных видов местности для 3D-реконструкции ландшафтных структур с помощью пакетов, использующих трех мерную графику Дискуссионным остается вопрос, достаточно ли априорного изучения космонавтами планируемых участков местности для посадки СЛМ или необходи мо изыскивать возможность компьютерной поддерж ки распознавания по заранее выявленным характер ным точкам (объектам). Из инженерной психологии и физиологии сенсор ных систем человека известно, что даже при глубо ком предварительном изучении сложно структуриро ванных стимулов для зрительного распознавания (рассматриваемого в контексте когнитивных функ ций), у человека из за ограничения рабочей памяти могут появляться ошибки в ходе сравнения «теку щих» картин с хранимыми эталонами долговремен ной памяти Этот феномен может проявиться при контроле «подстилающей поверхности» по глиссаде посадки в реальном времени с разных высот. В общем случае уровень ПСО должен позволять экипажу обеспечить: правильный выбор траектории снижения; плавное уменьшение поступательной скоро сти; зависание на установленной высоте перед прилунением Для этого на мониторе рабочего места должен быть обеспечен многопортовый режим синхронизиро ванного отображения пилотажных параметров о дви жении по глиссаде, о местоположении на электрон ной карте, запасе топлива, «набегающей» подстила ющей поверхности лунного ландшафта, прогнозиру емой точки прилунения аппарата Точность выдерживания заданных скоростей сни жения, зависания и посадки СЛМ обуславливает необходимость отображения на мониторе приборной доски инструментальных параметров с динамически обновляемыми данными от датчиковых систем В со ответствие с этим требованием должен быть преду смотрен состав датчиков, в совокупности обеспечи вающих полноту представления ЧО данных о процес се посадки в автоматическом и в ручном режимах Правильно выбранная траектория должна позволять экипажу непрерывно просматривать посадочную площадку и место посадки, выдерживать вертикаль ную скорость снижения в заданном диапазоне значе ний, а своевременное визуальное обнаружение и идентификация в месте посадки препятствий недопу стимо больших размеров должно обеспечить приня тие решений о пролете над препятствиями на доста точной высоте Для выполнения этих условий должен обеспечи ваться непрерывный визуальный контроль ЧО поса дочной площадки и места посадки Возможный путь преодоления ограничения види мости в условиях посадки на Луну – применение средств компьютерного зрения, когда электронное изображение формируется по данным инструмен тальных измерительных систем с помощью систем и компонентов авионики в русле современных разра боток интегрированных и автоматизированных чело веко машинных интерфейсов и взаимодействий на летательных аппаратах [4, 5, 6]. В рассматриваемом случае моделирования по садки СЛМ помимо требований к системе синтезиро ванного видения (англ.: Synthetic Vision System –SVS) в задаче получения улучшенных изображений внешней среды ставится дополнительная задача –визуализации данных о рельефе Для информационного обеспечения систем SVS необходимо использовать базы данных рельефа местности вдоль орбиты и траектории спуска, что требует отдельного рассмотрения, поскольку в этой области накоплен огромный массив информации [7]. Благодаря реалистичному видению окружающей обстановки системы синтезированного видения мо гут обеспечить космонавтов инструментами индика ции, способствующими достижению ряда эффектов эргономической оптимизации: улучшение простран ственной и ситуационной осведомленности, умень шение времени принятия решения, уменьшение ошибки восприятия полетной информации по уда ленности объектов, их относительных размеров, по вышение эксплуатационной гибкости использования мнопортовых режимов индикации обстановки за счет комбинирования инструментальных и образно символьных представлений релевантной информа ции по желанию оператора, устранение плохой ви димости как фактора, влияющего на безопасность полета, упрощение пилотирования по приборной информации при дополнении ее синтезированной картиной местности по профилю маршрута, исполь зование базы данных поверхности в районе пилоти рования, использование цветового кодирования для отображения высоты различных объектов на мест
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 231 ности, обеспечение специальных приемов выделе ния и цветовой визуализации препятствий и др Так же как, и при посадке ЛА вертолетного типа в усложненных условиях, необходимо достичь обеспе чения пространственно ситуационной осведомлен ности оператора о положении аппарата и ситуацион ной осведомленности о состоянии зоны посадки [8]. Эти решения существенно повышают надежность выполнения полетной операции в дополнение к су ществующим развитым средствам автоматизации посадки пилотируемых и беспилотных аппаратов вертолетного типа [9, 10].
пло щадке прилунения по критериям риска коллизий и развития непросчитанной заранее ситуации. В этой ситуации своевременность и правильность принятия решения о переходе в режим ручного управления полностью зависит от уровня простран ственно ситуационной осведомленности человека Именно ее улучшению должны быть подчинены предлагаемые способы прототипирования режима в первую очередь Из этого следует вывод о реализуемости моди фикации структуры ранее разработанной вычисли тельной платформы и оригинальных VR-инструментов системы виртуального окружения VirSim для построе ния имитационных моделей применительно к иссле дованиям опасных, ответственных и напряженных по зрительной деятельности этапов функционирования сложных систем «человек машина». В качестве одно го из показательных примеров реализации таких эта пов и режимов функционирования человеко машинных комплексов в работе рассмотрена посадка спускаемого лунного модуля Существенно, что удалось выявить близкую ана логию этого вида деятельности космонавтов с уда ленным режимом взаимодействия операторов
Выводы 1. В историческом аспекте в нашей стране актив но развивались различные технологии визуализации внешней среды на космических тренажерах для под готовки операторов и в интересах эргономического проектирования деятельности, среди которых наибо лее продвинутыми являются технологии погружения операторов в виртуальную среду деятельности, что создавало, в частности, условия для освоения прие мов ведения пространственной и ситуационной ори ентировки в осложненной обстановке Такие способ ности будут необходимы, чтобы избежать опасностей столкновения лунного спускаемого модуля с есте ственными препятствиями на поверхности Луны при посадке в осложненной обстановке
Заключение Проблема использования автоматических режи посадки во время перспективных пилотируемых полетов к Луне, связанная с человеческим проектирования В этой связи актуаль на разработка систем прототипирования на базе тех нологий виртуальной реальности, но при этом суще ственно опираться на опыт применения улучшенных интерфейсов, которые изначально предложены для пилотируемых летательных аппаратов, а в последу ющем заняли видное место при разработке дистанци онного управления беспилотными аппаратами Предложенный метод и алгоритмы реализованы и апробированы в комплексе VirSim, разработанном в ФГУ ФНЦ НИИСИ РАН (Москва) [1]. Полученные результаты дополняют ранее разработанный про граммный комплекс GLView и предполагают допол нительное использование электронных карт лунной поверхности В совокупности вновь разработанные средства дают возможность визуализации в реальном време ни параметров движения и отображения оператору внешней визуальной обстановки для мониторинга неблагоприятного развития событий при посадке в нерасчетной зоне и/или на неблагоприятной наземных пунктов управления беспилотными аппа ратами на этапе контроля снижения и посадки В этой связи планируется рассмотреть вопросы по строения учебных моделей для освоения операто рами приемов управления аппаратами вертикально го взлета и посадки, лучшего понимания принципов индикации параметров движения и отображения ви зуальной обстановки как в режиме видеопотока с камер слежения, так и с помощью системы улучшен ного видения Отдельные модули для этой цели так же вошли в состав модифицированной системы вир туального окружения VirSim.
фактором, во многом определяется качеством человеко машинных интерфейсов и их отработки на стадии эр гономического
2. Предлагаемое решение для виртуального прототипирования посадки спускаемого лунного мо дуля также относится к классу систем построения виртуального окружения оператора и имеет ряд пре имуществ в отношении оперативной подстройки к текущему уровню проработки реальных изделий ра кетно космической техники, проработки дорожной карты лунной программы, испытаний прототипов в условиях проектно испытательной деятельности опытно конструкторских
бюро и промышленного про изводства Это позволяет не только ускорить про цесс создания тренажеров соответствующих пилоти руемых аппаратов, но и включать космонавтов в процесс испытаний предлагаемых решений для улучшения эргономических характеристик 3. К сегодняшнему дню наиболее реалистично удается воспроизвести интерьер кабины спускаемого аппарата, вид из иллюминатора и некоторые прибо ры инструментальной информации по аналогии с их дизайном и принципами функционирования на орби
мов
7. Maltsev A.V. Visualization and virtual environment technologies in the tasks of cosmonaut training / A.V. Maltsev, M.V. Mikhaylyuk // Scientific Visualization, 2020. – Vol. 12. – № 3. – pp. 16–25. – DOI: 10.26583/sv.12.3.02 (accessed: 08.07.2021). — Text: electronic.
synthetic vision concepts for UAV operations
человека и автоматов, и их решение будет значимым шагом в достижении необходимого уровня пространственной и ситуационной
садки
8. Mashkov V.G. About safety during landing aircraft of the helicopter type on unprepared ground / V.G. Mashkov, V.A. Malyshev // Journal of Siberian Federal University. Engineering & Technologies. – 2019. – №12(6). – pp.724-732. –DOI: 10.17516/1999-494X-0172. – Text: unmediated. of / L.C. Gloria, H.D. Mark, A.R. Heath [et al] and Synthetic Vision: Proceedings, 2006. – vol. 6226. DOI: 10.1117/12.665633 (accessed: 08.07.2021). Text: electronic.
3. The Artemis Lunar Exploration Program Overview // https://www.nasa.gov : [сайт]. — URL: https://www.nasa.gov/sites/default/files/atoms/files/artemis_plan-20200921.pdf (accessed: 08.07.2021). — Text: electronic.4. Avionics Human-Machine Interfaces and Interactions for Manned and Unmanned Aircraft / YixiangLim, Gardi Alessandro, Sabatini Roberto [et al] // Progress in Aerospace Sciences. — 2018. — № Vol. 02. — С. 1-46. – DOI: 10.1016/j.paerosci.2018.05.002 (accessed: 08.07.2021). — Text: electronic.
9. Автоматизация посадки беспилотного вертолета на необорудованную площадку / Н В Ким, В П Носков, И В Рубцов, В А Аникин // Известия Южного федерального университета Технические науки, 2020. – №1. –С.17-25. – DOI: 10.18522/2311-3103-2020-1-17-25. – Текст: непосредственный 10. Simulation assessment
// Enhanced
Литература
Разработки / Developments 232 тальных комплексах и с учетом аналогов на аппара тах вертикального взлета и посадки, включая прибо ры дистанционного управления для беспилотных летательных средств 4. Перспективные решения, которые могут быть востребованы на следующих этапах развития систе мы отображения информации спускаемого лунного модуля, связаны с идеями и технологиями построения визуальных сцен на принципах улучшенного (синтети ческого) видения, прежде всего, имея в виду приме нение систем компьютерного зрения для оперативно го построения рельефа местности и выделения (сред ствами искусственного визуального представления) опасных с точки зрения рисков коллизий образований на поверхности (крупных камней, крутых склонов, расщелин и др.). Сегодня такие системы активно при меняются в вертолетной авиации для посадки на не подготовленные (заснеженные, запыленные) площад ки и в условиях ограниченной видимости
5. В составе разработанного пакета программ моделирования и визуализации представлен ряд модулей, позволяющих решить такие задачи постро ения 2D- и 3D-зрительных сцен, которые в полной мере отвечают целям прототипирования полетных операций, сопровождающихся усложненными усло , а следовательно, с применением элементов искусственного интеллекта для экспресс оценки их пригодности для улучшения условий принятия решений оператором в ходе по Эти задачи составляют одно из главных улучшения взаимодействия осведомленности космонавтов Су щественно, что такие режимы человеко машинного взаимодействия необходимо в значительно большем объеме отрабатывать на перспективных тренажерах, чем это существует сегодня, поскольку технологии искусственного интеллекта только начинают внед ряться в авиационной и космической практике
5. – – С. 11–44. –Текст: непосредственный
виями зрительного восприятия
–
—
Визильтер Ю В Проблемы технического зрения в современных авиационных системах / Ю В Визильтер, С Ю Желтов // Техническое зрение в системах управления мобильными объектами – 2010: Труды научно технической конференции семинара. – М.: КДУ, 2011.
.
6. Bailey Randall E. The Use of Enhanced Vision Systems for See-and-Avoid During Surface Operations / Randall E. Bailey // AIAA Infotech @ Aerospace. – 2016 – DOI: 10.2514/6.2016-2045 (accessed: 08.07.2021). — Text: electronic.
2. Тимохин П Ю Моделирование видимого движения Земли вдоль участков суточной трассы МКС в косми ческих видеотренажерах / П Ю Тимохин // Труды НИИСИ РАН. – 2019. – Т. 9. – № 6. – С. 111–117. — Текст: непосредственный.
Вып. 4.
актуализируют поиск способов улучшения простран ственно ситуационной осведомленности оператора 6. Дальнейшие направления совершенствования предлагаемых решений в области виртуального про тотипирования посадки спускаемого лунного модуля связаны с решением комбинированного использова ния человеком оператором электронных образов заранее разведанных участков местности (из обшир ной базы электронных данных) и оперативно распо знанных в процессе спуска посадочных площадок
1. Система виртуального окружения VirSim для имитационно тренажерных комплексов подготовки космо навтов / М В Михайлюк, А В Мальцев, П Ю Тимохин [и др.] // Пилотируемые полеты в космос. — 2020. — № 4(37). — С. 72–95. – DOI: 10.34131/MSF.20.4.72-95. — Текст: непосредственный
направлений
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 233
Vitaly M. Usov, Doctor of Medical Science, GCTC, Professor, Chief Research Scientist, Star City, Moscow Region, 141160, Russia, tel.: +7(910)459-48-02, khoper.1946@gmail.com, ORCID ID: 0000-0001-9759-3444, Researcher ID: S-5730-2017, Scopus Author ID: 7006372645
Усов Виталий Михайлович, д м н.,
5. Vizil'ter, Yu.V. and Zheltov, S.Yu., 2011. Problemy tekhnicheskogo zreniya v sovremennykh aviatsionnykh sistemakh [Problems of technical vision in modern aviation systems]. In: Trudy Nauchno-Tekhnicheskoy KonferentsiiSeminara «Tekhnicheskoe Zrenie v Sistemakh Upravleniya Mobil'nymi Ob"Ektami» [Proceedings of the Scientific and Technical Conference-Seminar on Technical Vision in Control Systems for Mobile Objects], 4, pp.11–44. (in Russian).6. Bailey, R.E., 2016. The use of enhanced vision systems for see-and-avoid during surface operations. AIAA Infotech @ Aerospace. DOI: 10.2514/6.2016-2045.
Boris I. Kryuchkov, Doctor of Technical Science, Federal State Organization «Yu.A. Gagarin Research & Test Cosmonaut Training Center» (GCTC), Chief Research Scientist, Star City, Moscow Region, 141160, Russia, tel.: +7(495)526-34-37, b.kryuchkov@gctc.ru
Крючков
2. Timokhin, P.Yu., 2019. Modelirovanie vidimogo dvizheniya Zemli vdol' uchastkov sutochnoy trassy MKS v kosmicheskikh videotrenazherakh [Modeling the apparent motion of the Earth along sections of the daily route of the ISS in space video simulators]. Trudy NIISI RAN, 9(6), pp.111–117. (in Russian).
об авторах Михайлюк Михаил Васильевич, д ф.-м н., профессор, Федеральное государственное
4. Yixiang Lim et al., 2018. Avionics Human-Machine Interfaces and Interactions for Manned and Unmanned Aircraft. Progress in Aerospace Sciences, 2, pp.1-46. DOI: 10.1016/j.paerosci.2018.05.002.
Information about the authors
8. Mashkov, V.G. and Malyshev, V.A., 2019. About safety during landing aircraft of the helicopter type on unprepared ground. Journal of Siberian Federal University. Engineering & Technologies, 12(6), pp.724-732. DOI: 10.17516/1999-494X-0172.9.Kim,N.V.,Noskov,V.P., Rubtsov, I.V. and Anikin, V.A., 2020. Avtomatizatsiya posadki bespilotnogo vertoleta na neoborudovannuyu ploshchadku [Automation of landing an unmanned helicopter on an unequipped site]. Izvestiya Yuzhnogo federal'nogo universiteta. Tekhnicheskie nauki, 1, pp.17-25. DOI: 10.18522/2311-3103-2020-1-17-25. (in Russian).10.Calhoun, G.L. et al., 2006. Simulation assessment of synthetic vision concepts for UAV operations. In: Enhanced and Synthetic Vision: Proceedings, vol. 6226. DOI: 10.1117/12.665633.
Информация учреждение «Фе деральный научный центр Научно исследовательский институт системных исследований Российской акаде мии наук» (ФГУ «ФНЦ Научно исследовательский институт системных исследований РАН»), заведующий от делом, 117218, Москва, Нахимовский пр., д. 36, к. 1, тел.: +7(499)129-28-30, mix@niisi.ras.ru, ORCID: 00000002-7793-080X Борис Иванович, д т н., ФГБУ «Научно исследовательский испытательный центр подготовки космонавтов имени Ю А Гагарина» (ФГБУ «НИИ ЦПК имени Ю А Гагарина 141160, +7(495)526-34-37, b.kryuchkov@gctc.ru профессор, ФГБУ «НИИ ЦПК Ю А Гагарина», г н с., 141160, Московская область, Звездный городок, тел.: +7(910)459-48-02, khoper.1946@gmail.com, ORCID: 0000-00019759-3444, ResearcherID: S-5730-2017, Scopus Author ID: 7006372645
References
»), г н с.,
Московская об ласть, Звездный городок, тел.:
имени
7. Maltsev, A.V. and Mikhaylyuk, M.V., 2020. Visualization and virtual environment technologies in the tasks of cosmonaut training. Scientific Visualization, 12(3), pp.16–25. DOI: 10.26583/sv.12.3.02.
Mikhail V. Mikhaylyuk, Doctor of Physical and Mathematical Sciences, Professor, Scientific Research Institute for System Analysis of the Russian Academy of Sciences, Head of Department, 36-1, Nakhimovsky pr., Moscow, 117218, Russia, tel.: +7(499)129-28-30, mix@niisi.ras.ru, ORCID: 0000-0002-7793-080X
3. NASA, u.d. The Artemis Lunar Exploration Program Overview. Available at: <https://www.nasa.gov/sites/default/files/atoms/files/artemis_plan-20200921.pdf> [Accessed 08 July 2021].
1. Mikhaylyuk, M.V. et al., 2020. Sistema virtual'nogo okruzheniya VirSim dlya imitatsionno-trenazhernykh kompleksov podgotovki kosmonavtov [The VirSim virtual environment system for simulated cosmonaut training complexes]. Pilotiruemye polety v kosmos, 4(37), pp.72–95. DOI: 10.34131/MSF.20.4.72-95. (in Russian).
Разработки / Developments 234 УДК: 629.365 DOI: 10.31776/RTCJ.9309 C. 234-240 Особенности преодоления уклонов шагающими аппаратами В . В . Чернышев , В . В . Арыканцев , И . П . Вершинина , А . А . Гончаров , Н . Г . Шаронов Волгоградский государственный технический университет ( ВолгГТУ ), Волгоград , Российская Федерация , vad.chernyshev@mail.ru ( Материал поступил в редакцию 15 декабря 2020 года ) Аннотация Для мобильных роботов, предназначенных для работы в экстремальных условиях, важной характеристикой является величина преодолеваемого уклона Для колесных и гусеничных машин угол преодолеваемого укло на ограничен сцепными свойствами грунта Шагающий движитель может обеспечить преодоление более кру тых уклонов, так как аналог коэффициента сцепления для шагающих машин, при большой глубине следовой колеи, может быть существенно больше 1. В работе обсуждаются результаты экспериментальных исследо ваний особенностей преодоления уклонов шагающим аппаратом в условиях слабонесущего грунта При пре одолении уклонов мобильными роботами возможно их опрокидывание или сползание под уклон Показано, что на слабых грунтах сползание шагающих машин под уклон маловероятно Это обусловлено значительны ми деформациями грунта под опорными элементами движителя С другой стороны, деформация грунта ухудшает показатели устойчивости шагающего аппарата к опрокидыванию Рассмотрен способ повышения устойчивости к опрокидыванию за счет управления положением корпуса робота путем раздельного регулиро вания условного клиренса механизмов шагания Показана возможность регулирования клиренса в движителе на базе цикловых механизмов шагания Умнова Чебышева. Преодоление уклонов требует определенного за паса тягового усилия Определены значения дополнительной мощности и силовые характеристики привода шагающего движителя, необходимые для успешного преодоления уклонов Результаты работы могут быть востребованы при разработке шагающих машин и мобильных роботов Ключевые слова Мобильные роботы, шагающие машины, взаимодействие с грунтом, тягово сцепные свойства, преодоление уклонов, устойчивость к опрокидыванию, математическое моделирование, натурные испытания Благодарности Исследование выполнено при финансовой поддержке РФФИ и Администрации Волгоградской обл., проекты № 19-08-01180 а, № 19-48-340007 р а
Anton
Volgograd, Russia, vad.chernyshev@mail.ru (Received
For mobile robots designed to work in extreme conditions, an important characteristic is the value of the overcoming slope. For wheeled and tracked vehicles, the angle of the overcoming slope is limited by the adhesion properties of the soil. The walking device can provide overcoming of higher slopes, since the analogue of the adhesion coefficient for walking machines, with a large footprint track depth, can be significantly greater than 1. The paper discusses the results of experimental studies of the features of overcoming slopes by a walking device in weak soil conditions. When mobile robots overcoming inclines, they may overturn or slide downhill. It is shown that on soft soils the sliding of walking machines downhill is unlikely because of significant deformations of the soil under the support elements. On the other hand, the deformation of the soil worsens the resistance of the walking vehicle to overturning. A method of increasing resistance to overturning by controlling the position of the robot body by separately regulating the conditional clearance of walking mechanisms is considered. The possibility of adjusting the clearance in the propulsion unit
Features of slopes overcoming by walking devices P. Vershinina, A. Goncharov, Nikolay G. Sharonov University (VSTU), 15 December 2020)
Volgograd State Technical
Vadim V. Chernyshev , Vladimir V. Arykantsev, Irina
Abstract
дение ля
э ялась
/
икой
ты в
ом
Ackno
проти уклон намик ная G будет ент с ничны 0 k под у грунта сущес ( k под у при одоле движи уклон
ельное
о остью в мом й опорных то отающих в п асси еще дви вышала спол й угол подъе равнительно онов можно о едовой колеи йствами испо 9(3) lop-untaryes,19е с тв ка й к оле ши ис кс по ро кже – с лах ль бъ ент чек ро га за ма не бъ — ль
on the of trac for mentsu
ROBOTICS and 235 king mechanis er and the forc en ndwithdeterminedthegroutests.dtheAdminis
т иметь
сползание еть
предназначе овиях, важной преодолеваем ых машин уго свойствами гр деляется из с машины; F и сопротивл ьная реакция ления и грунт Угол преодол увеличен за згона Если н яющая силы илы сцеплен под уклон К рунтах даже ло, не пре ачениях k с 45 На слаб будет иметь х На сухо например, с ы будет име ый по сцепле ньше 20 Ш преодоление щем способе ятствием для трат мощнос
ки —
— коэффиц ивления
их машин и р можны ситуац ффициента с ольшой глуби , 6]. е в ВолгГТУ и и кардинально уклонов [7]. П ала уклоны в
унок 1 — Определ преодолев Determination o for ov ия показал при перест и сползание екоторой нес горизонтальн еханизмов ш 8]. После сме так как длин лон Поэтому е указанных з лы преодоле тическим отс хорошими не
шин
место
РОБОТ
Key w tippinMobileg
леваемых
ном режиме различными лялась вид мера устан направлени видимости п ны – (2) и в пользовалас периментал кадровой об валась вели угол поворо целью опред Рису Figure 1 Испытан 30–32 жение стоп ясняется не смены стоп цикловых м тивофазе [8 лось вверх, ние под укл будет выше большие угл яснить прак на грунте с BERNETICS Climbing slo tics of the wa of the work c and coupling p Volgograd re е (рис. 1). Исп и уклонами, гр еозапись пр авливалась ю движения т попадали дви ертикаль – (3 сь удаленная ьных данных бработки вид ичина уклона ота кривошип деления
ЭВМ
Введ Дл работ ристи на Дл левае преде FG f Fk жению и kf
передви
ление максималь ваемого уклона of the maximum an vercoming ли, что уж тупании имел машины под согласованно ных скоросте шагания, раб ены стоп ша на шага пре у предельны значений Ср еваемых укло сутствием сле есущими свой 2021; a certain amo s drive necess nd in the hercomingdeveslopprojectsno.
КИБЕРНЕТИКА
ению
alking device’s can be deman properties, ov
ля
сцепления
на может
енных для й характе мого укло ол преодо рунта Его условия F kN и дви грунта; k тового со леваемого а счет ди аправлен ы тяжести ия F , то Коэффици для гусе евосходит сползание бонесущих при песке место пре Шагающий больших движения CYB is shown ce characteris d. The results und, traction a stration of the фазы
дви вдоль
е
ходили в балк й луг Осущес жения. Видео и нормально ом, что в ее п ), корпус ма ве вертикали Обработка путем Фикси Это
e
жения Ff пресс дефо G для ш вой ко Вм шагаю чения римен
сти на его роботов на ции, когда сцепления ине следо испытания ого увели При экспе в автоном TECHNICAL
при шагающ яется препя требует зат для шагающи рунтах коэф , при бо ыть 1 [5, проведенные не показали у преодолева
возм аналог
ev cyclic walk ditional powe pes have bee mobile robots. s, dmodeling,interactionfielbyRFBRan







ых машин, 0,8–1 [1, 2]. уклон будет п ах сползание ственно ме 0,4–0,5, kf уклон гусени 22–27 , еваемый укл итель может нов: во первых, я грунт не явл 0 , а лишь сование [3]; во вторых, рмируемых г 0 [4]; в третьих, шагающих ма олеи, может б месте с тем, ющего шасси я угла преодо нтах машина ЕХНИЧЕСКАЯ К cominguesnov-Chebyshoftheadofslochinesandmingmachinesathematical ts ally 340007supportedp_a. х роботов, альных
ТОТЕХНИКА e basis of Um ction. The val uccessful over of walking ma words robots, walk g resistance, m owledgemen arch was parti 180 a, 19-48 мобильны экстрем является колесных уклона знач Gf sinF , гд NGcos соот быт при уклон Gsin буде место на усло величина п и гусеничны ограничен с ение опред е G — вес сцепления — нормаль иенты сцепл ветственно У ь несколько жении с раз а составля т больше си сползание хороших гр как прави При таких зн ри 39– 4 под уклон б ньших угла 0,15–0,2) , чной машин а предельны он будет ме обеспечить

и Т
opes requires egion, прох рунт — сухой роцесса движ в плоскости таким образо ижители – (1 3). В качеств я опора ЛЭП х осуществля деозаписи на а, скольжени пов механизм ы шага
е стоп, а та мов шагания ьного угла ngle of the slope же при уг ло место ско уклон
емого
ления
s5ms
research пытания
kf N — силы ю;
08-01Resea
мплекс
Figure 2 — W
та
чивых ре
ное различие чаного
ания
лись
/ Develo вались лыжео заметного р еличения реа обходимо бол счет использ стью [5,
). Т на система п opments образные сто роста коэфф ализуемой п льшее заглуб зования стоп работе обсу ых исследова нов шагающи стопами в у ытаний осуществлял парата (мод (рис. 2). ающий модульно Walking modular зработан в Во ных систем, т ии механизм вления дви ет в себя 2 ш , соединенны выполнены установлены вой электроп ных электрод м скорости в ны в виде от енных в водо арату работат опитание и у о кабелю. М вого типа, с ии опорных т тно кинемати анизм работа В результат дна из ног бо менные (лыж Также в движ пассивной ад пы В резул ициента сце о сцеплению ление стопы с малой опор ждаются рез ний особен ми аппарат словиях сла ись на базе ульно аппар -аппаратный ко hardware
аппарата МАК-1 evice MAK-1
его
механизм крепленн адаптаци по
дельных
сравнител сущие св условиях гусеничны дывание вание и с ющем сп осуществ вдоль укл зуально о кидывани преодоле на
стопы
а счет кинем оска шарнирн оса [13, 14]. можности апп остям опорно 180 кг виях слабоне юнах берега р асть эксперим овиях Испол ером 150×10 в статически до 0,04 МПа ихся в опоре е несущих св а в зависимо й песок отли способность, песка в подв ижении колес зможно их о н [1, 2]. Опро можно и при В ходе испы клонов, дви ование (рис 3 ь аппарата к лон Для успе ен запас мощ оль уклона с У робота М В ходе испы бортовые эл устимого мом авило, не одн арата с курса троприводов, роисходило п преодолевал
Раз зов ло уве нео за нос пер одо раз гру Ме ша пле Р том для ме МА и л ющ вдо ног баз рег вод лей поз [9, ще рат ров ша пос в п ме фа мо ван
МАК-1
замечено одного
x MAK-1
Электро
ни
вигателей с ращения
шестиногого ратного ком
дводных









В риментальны оления
Испытания о
лось от
оль
щие
поверхно присп верхности с укло осуществ пря Давление висимост и водо преодо перено около 1 Час усло (разме движении в 0,02 д находящи грунта ти Влажный ей несущей с го песка и п соки При дви о уклонам воз ие под уклон од уклон возм движения В одоление ук же маневриро устойчивость анию под укл также нуже авленной вдо и GGsin запаса нет отключались ышения допу дило, как пра о к уводу аппа ючение элект ерегрузки, про ов и уклоны






дили в услов рунтов на дю 45–50
ляющей с как оказа уже при привода Отключен менно, чт больших тающих в чески пос несколько Рис сти, обеспеч мов шагания ой стопы в ф я стопы пов особляемост и Масса аппа тания проход х песчаных гр нами до влялась в под моугольные е на грунт при жимах менял ти от числа н о существенн того же песч насыщенност льно хороше войства сухог были невыс ых машин по или сползан сползание по пособе перед влялось пре лонов, а такж оценивались ию и к сполза ения уклонов оление напра силы тяжести алось, такого 25–30 о из за превы ние происход то приводило углах отклю режиме пе сле 1–2 шаго о этапов сунок 3 — Испыта Figure 3 — Tests чивающая за подъем нос фазе
матики но за Само парата ой по
ривод
зработки 6]. уклон испы агающего апп екса) МАК–1
есущих р Вол ментов ьзова 00 мм). устой , в за Было войств сти от ичался а не одных сных и проки окиды шага ытаний жение 3). Ви к опро ешного щности остав МАК-1, ытаний ектро мента новре а При рабо ракти лись в
и
зе
и
вки
Аппарат раз матизированн я оптимизац тодов упра АК–1 включае левого борта модули которых ) бортов асинхронн гулированием выполнен , расположе аппа 10]. ествляется по — циклов траектори агания поборт следний меха противофазе хотя бы од азе Стопы см угольные comple Ко мод сменной виде нес механизм , выпо Бо сил ь в подводн правление а еханизмы ша возможность очек [11, 12] чески связан ют синфазн е в каждый рта находитс еобразные и ителе аппара аптации стоп
й
ог
ата реализо пы к опорной 236 я и о о й и о о 3 а м о х ы и й й й

2

зволяет
р в
Испыт и сыпучих га
змерными с унта етодика
защищенных
лгГТУ на фа ранспорта и ов шагания жением
s of the walking de






3
акультете ав вооружений и отработки онструктивно дуля правого рамой Шага ущих балок, а шагания (3 олненный на частотным ортовые при ловых моду х боксах Это ных условиях ппарата осу агания аппа ью корректи Механизмы ны Первый о, а средний момент вре ся в опорной и малые пря
агающих
и
да
ьтате не бы епления Для ю силы тяги ы, например, рной поверх зультаты экс нностей пре ами с мало абонесущего
х
шагающего
вышает возм ти к неровно арата
ги
Рисунок — Шага
задач тичес зован рассм шаге давал шаге
Анал






на



помощ
сползание о Сполза
показ опрок шагаю борта (рис перву испыт под чески экспер низкой машин н ают [15]. Исп — опреде ское возмуще н 2-х этапный матриваемой вычислений лась вертика вертикальна ным кинемат 4, например, онентов дефо ности при 2-х стопы На р гающей нагру ный объем м ние слои Эт ента сцепле участок, где п х испытан иментов бы несущей спо под уклон м сь даже при льными деф тами шагающ МАК-1 глуби –0,3 м Кром место «буль ольжения пе та, препятст результатам йствия жест оделировани нечно элеме стическое п инейных за пряжениями упругоплас опорной по так как воз а слабонес ользовалась лялись реакц ние В систе итерационн нелинейной в качестве г льная осадк я осадка сум ическим пе представлен рмаций пес этапном кин ис. 4а видно зки существ ассива грун им обусловл ния На рис еред стопой те образует ьжению ны, деформ чивости ша 6]. Так, нап ата вдоль наиболее н грунт разр Такие ситуа чае потери н го борта, ве ется на д Например, рина следо ормации гру
словл опорн тания ний д испыт в нап вался Это с
сдвиг тельн верхн фици ный у вверх пятст С
ах с
1 a рата 1,B ТОТЕХНИКА и Т из результат ходе



КИБЕРНЕТИКА
/
ний ыло выяснен особностью с маловероятно углах 45 ормациями г щих машин П ина следовых ме того, как
грунта шагаю ние н
ными Конта квази стоп затух
и нижнего и 12 NN д ними в место при ств грунта она факти ный угол щего аппа которого м допол TECHNICAL CYB 7 нительный ственно сн опрокидыва Рисунок 4 деформа при нормал Figure 4 — Dist under the footlo Рисунок Figure 5 В общем зависит от о ширине след ской устойч BERNETICS угол будет ижает запас нию Распределение аций грунта под с льном и сдвигающ ( –100uy tribution of course t (size 150×100 mm oading ( –1uy а) 5 — Силы, дейст при движен Forces actingalonong м случае усто отношения вы довой колеи ивости можн равен 1 с устойчивос а) б) е курсовых (а) и в стопой (размеро щем кинематиче 0 мм, 50ux м se (a) and vertical m) under normal a 100 mm, 5ux в) твующие на шага нии вдоль уклона n the walking devi g the slope ойчивость ш ысоты его це B Повысит но за счет уп 2021; 10 , что су сти аппарата вертикальных (б м 150×100 мм) ском нагружении мм(b)) soil deformatio and shear kinema 0 mm) б) ающий аппарат а ce when moving агающих маш ентра масс h ь запас стати правления по 9(3) ще к ) ticns ин C к че ло
компо плотн нии с
н









ROBOTICS
РОБОТ
ьдозерный» э еред стопой о твующий ско ми моделиров ткой стопы со ие осуществл нтного модел оведение гру висимостей м и, а также м стических ма оверхностью зникающие п сущих грунта ь обратная п ции грунта н ме ANSYS б ный алгоритм й задачи [5]. граничных ус ка стопы uy мировалась еремещением ы поля распр чаного грунта нематическом о, что в нап венно нагруж нта, а не то лено повыше 4б заметен й грунт выда тся бугор гру
В результа вующий скол другой сторо затели устой кидыванию [1 ющего аппар а являются 5а). Поэтому ую очередь таниях В слу ногами нижне и увеличива )/( ayrctguB МАК-1, ши 6 м, при деф ЕХНИЧЕСКАЯ К ов
валос форм
тальн рис 4
. Это обу грунта под При испы х углубле показали эффект — образовы ольжению вания кон о слабоне лялось при лирования унта зада между де материаль атериалов считался при смене ах быстро постановки на кинема ыл реали м решения На 1-ом словий за , на 2-ом с горизон м ux На ределений а средней м нагруже правлении жен значи олько его ние коэф характер вливается унта, пре ухудшает ппарата к движении
о, что
ющих
ANSY


В

тактно сущим
чи
and 237

е наблюдало лено значите ными элемен ях аппарата достигала 0,2 тания, имеет правлении ск я бугор грун согласуется с ого взаимоде м грунтом М щи пакета ко YS. Упругопла сь в виде нел мациями и на константами акт стопы с статическим, колебания
мация грунта агающего ап пример, при уклона ноги агруженными рушается под ции имели м несущих свой еличина укло дополнительн для шагающ овой колеи унта 0,3uy
элемента
озволяет
изма
клиренса
ию
оп опорной т нению его Механ нять
сл
гающего опрокиды нием
ия
Раз же кли уст бы лас обе ств опо ной вос Пр ров гор раз зна ван укл 2 Fig ши неп Тек зработки / Develo нием корпуса иренса меха тойчивости ш вертикальна сь внутри о еспечить гор вия силы тя орного много й поверхност сть аппарата облема закл вания клире ризонтальнос зность клирен ачениях h нию также им лона как /( arctgh B Рисунок 6 gure 6 — Change 1. Забавник иностроение, 2. Гуськов В посредственн 3. Кемурдж кст: непосред opments а, в частнос анизмов шаг шагающего ап ая проекция опорного мн изонтальност яжести G б оугольника пр ти (рис. 5б). уже не зави ючается в то нса огранич сти корпуса нсов бортов повышение у меет место ( бы уме ) а) б) — Изменение кл траектории опо in ground clearan of the referen ков Н А Осн 1975. – 448 c В Трактор ный жиан А Л Пл дственный ти, путем ре ания Для парата необ его центра м огоугольника ь корпуса, то удет проход и любом на В этом случ сит от отнош м, что диап ен размерам необходимо hBtg П стойчивости рис. 5в), зде ньшается иренса при изме рной точки ce when changin ce point овы теории ы Теория / анетоходы / егулирования статической бходимо, что масс находи а [16]. Если о линия дей дить внутри аклоне опор чае устойчи шения /C hB азон регули ми ног Для обеспечить При меньших к опрокиды есь величина на угол енении ng the trajectory Лите транспортны В В Гусько А Л Кемур 238 я й и и я ь х а л

несущего гру точного запас ение более к ми или гусени ышенными тя ителя на сла в мобильным ание или спо несущей спос под уклон ма рмаций грунт ля С другой ет показатели овысить зап о за счет уп в частности, ловного клир улировка клир адаптивного т йших цикловы боты могут б ющих машин и ы в экстремал А Забавни
ение. – 1988 ностроение

зон его и
льно легко о птивного типа Ортоног» с д блема попер разной длин можно цик кой движител шагания Ум ппарате МАК ляемого пово одвеса кором рректировки енение траек я приводит к 12– hh (рис а позволяют 0,2 м Такой д нять угол на ой поверхнос ответственно меры ног В п те эффектив может быть вы

ия


ми
ние шагаю
го регули шагания только в д телях на гания Ре при разра значенны ература ых гусеничных ов // Москва: рджиан. – Мо нение клирен механизмах ш р, в шагающе ортогонально ости решает лирование кл мах шагания ый на базе ва, был реал дения в меха , смещающе стигнута возм порной точки точки механи о условного к низмы шаган ренс в предел изменения по по отношени Для увеличен ходимо увел ном шагающ ия положени ние овиях слабон лучае достат ть преодоле и с колесным ловлено пов ющего движи ении уклонов х опрокидыва ах с низкой н ющих машин ьных дефор ами движител унта ухудшае аппарата П ыванию можн пуса робота, ирования усл Причем регу движителях а базе простей езультаты раб аботке шагаю ых для работы х машин. / Н Машиностро осква: Машин нса сравнител шагания адап ем роботе «О го типа, проб ся за счет р лиренса возм Именно так механизмов лизован в ап анизм управл его точку по можность
ктории изме 6). изме диапа аклона сти до о, угла полно вность ыше ие ро могут нов, в инами йства х При и воз уклон полза , из за рными дефор ти ша ости к оложе ельно низмов жна не движи ов ша ованы редна иях а: Ма Текст: 00 с. –

унта шагающ са мощности, крутых уклон ичными маши тяговыми сво абых грунтах ми роботами олзание под собностью с аловероятно та под опор й стороны, д и устойчивост пас устойчиво правления по , путем разде ренса механ ренса возмож типа, но и в д ых механизмо быть востреб и роботов, пр льных услови ков. – Москв 8. – 375 с. –– 1993. – 40

и в
лах
ичивать
осуще а Так, движи речной ны ног кловых ль, по мнова К-1. За ротно мысла, траек








м
Измен ствить в например телями о устойчиво [17]. Регу механизм строенны Чебышев счет введ го звена была дос тории клир корпуса 2 7 Д 2 необх масштабн управлен Заключе В усло боты, в обеспечи сравнени Это обусл шагаю преодоле можно их На грунта значитель мация гру кор кор и [12]. Изме шагания h аппарата 0– 0 h мен к опорно h и, соо разм щем аппарат ем корпуса м

10. Design and underwater tests of subsea walking hexapod MAK-1 / V. V. Chernyshev [et al] // Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering OMAE2016 (Busan, South Korea, June 19-24, 2016). – 2016. – P. 9. – Text: unmediated.
16.
транс
2. Gus'kov, V.V., 1988. Traktory. Teorija [Tractors. Theory]. Moscow: Mashinostroenie Publ., p. 375. (in Russian).
1. Zabavnikov, N.A., 1975. Osnovy Teorii Transportnyh Gusenichnyh Mashin [Fundamentals of the Theory Of Transport Tracked Vehicles]. Moskow: Mashinostroenie Publ., p.448. (in Russian).
3. Kemurdzhian, A.L., 1993. Planetohody [Rovers]. Moscow: Mashinostroenie Publ., p.400. (in Russian).
техни ческий университет (ВолГТУ). – Текст: непосредственный 12. Чернышев В В Цикловой механизм шагания с трансформируемой траекторией опорной точки / В В Чернышев, В В Арыканцев // Теория механизмов и машин. – 2017. – т. 15, № 2 (34). – C. 71-79.
опора
14. Chernyshev V. V. Passive foot control in cyclic walking mechanism / V. V. Chernyshev, V. V. Arykantsev, Ya. V. Kalinin // Industrial Engineering, Applications and Manufacturing (ICIEAM 2017). – 2017. – p. 5 – DOI: 10.1109/ICIEAM.2017.8076189 (accessed: 11.08.2021). – Text: electronic.
движением шагающих машин / В. В. Лапшин. – М.: МГТУ им. Н. Э. Баумана, 2012. – 199 с. – Текст: непосредственный 17. Отработка методов нечёткого управления шагающим роботом «Ортоног» в полевых условиях / Е С Брискин, В В Чернышев, Н Г Шаронов
5. Chernyshev, V.V., Goncharov, A.A. and Arykancev, V.V., 2019. Modeling of contact interaction mechanics of the walking robots’ support elements at high tractive efforts. Robotics and Technical Cybernetics, 1(22), pp.53–57. (in Russian).6.Chernyshev, V.V. et al., 2020. Zakonomernosti kontaktnogo vzaimodejstvija malorazmernyh opornyh jelementov shagajushhih mashin so slabonesushhimi gruntami [Regularities of contact interaction of small-sized supporting elements of walking machines with weak soils]. Traktory i sel'hozmashiny, 3, pp.54-61. (in Russian).
7. Chernyshev, V.V., 2004. Polevye issledovanija shagajushhih mashin [Field research of walking devices].
2207283 Российская Федерация, МПК
15. Chernyshev V. V. Modeling of vibroimpact processes which occurs in feet changing of the walking units at viscoelastic grounds / V. V. Chernyshev, A. A. Goncharov, V. V. Arykantsev // Procedia Engineering. – 2017. – Vol. 176. – Pp. 387-393. – DOI: 0.1016/j.proeng.2017.02.336 (accessed: 11.08.2021). – Text: electronic. Лапшин В. В. Механика и управление [и др.] // Исследования наукограда. – 2013. – № 2. – С. 43-48. – Текст: непосредственный
4. Briskin, E.S. et al., 2013. Comparative analysis of wheeled, tracked and walking machines. Robotics and Technical Cybernetics, 1, pp.6-14. (in Russian).
№
13. Патент 2156711 Российская Федерация, МПК B62D 57/032 (2000.01) Шагающая опора для транс портных средств повышенной проходимости: № 99112582/28: заявл. 09.06.1999: опубл. 27.09.2000 / Д Е Охоцимский, Е С Брискин, В В Чернышев, С В Шерстобитов; заявитель и правообладатель Волгоградский государственный технический университет (ВолГТУ). – Текст: непосредственный
средств повышенной проходимости
РОБОТОТЕХНИКА и ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА / ROBOTICS and TECHNICAL CYBERNETICS 2021; 9(3) 239 4. Сравнительный анализ колёсных, гусеничных и шагающих машин / Е С Брискин [и др.] // Робототехни ка и техническая кибернетика. – 2013. – № 1. – C. 6-14. – Текст: непосредственный 5. Чернышев В В Моделирование механики контактного взаимодействия опорных элементов шагающих роботов при больших тяговых усилиях / В В Чернышев, А А Гончаров, В В Арыканцев // Робототехника и техническая кибернетика. – 2019. –№ 1 (22). – C. 53–57. – Текст: непосредственный 6. Закономерности контактного взаимодействия малоразмерных опорных элементов шагающих машин со слабонесущими грунтами / В В Чернышев, А А Гончаров, Я В Калинин [и др.]. // Тракторы и сельхозмаши ны. – 2020. – № 3. – С. 54-61. – Текст: непосредственный 7. Чернышев В В Полевые исследования шагающих машин / В В Чернышев // Тракторы и сельскохо зяйственные машины. – 2004. – № 4. – C. 20-22. – Текст: непосредственный 8. Брискин Е С О позиционной зависимости тягово сцепных свойств шагающих машин с цикловыми движителями / Е С Брискин. [и др.] // Тракторы и сельхозмашины.– 2009. – № 6. – C. 21-25. – Текст: непо средственный 9. Чернышев В В МАК-1 – подводный шагающий робот / В В Чернышев, В В Арыканцев // Робототех ника и техническая кибернетика. – 2015. – № 2. – С. 45-50. – Текст: непосредственный
11. Патент B62D 57/032 (2000.01) Шагающая для портных : 2001111611/28: заявл. 26.04.2001: опубл. 27.06.2003 / В. В. Чернышев, Е С Брискин, А Ю Савин; заявитель и правообладатель Волгоградский государственный – Текст: непо средственный
References
Vadim V. Chernyshev, Doctor of Technical Science, Associate Professor, Volgograd State Technical University (VSTU), Theoretical Mechanics Department, Professor, 28, Lenin pr., Volgograd, 400005, Russia, tel.: +7(960)88357-25, vad.chernyshev@mail.ru
Информация авторах Чернышев Вадим Викторович, д т н., доцент, Волгоградский государственный технический университет (ВолгГТУ), кафедра «Теоретическая механика», профессор, 400005, Волгоград, пр им Ленина, д. 28, тел.: +7(960)883-57-25, vad.chernyshev@mail.ru
об
Information about the authors
13. Volgograd State Technical University (VSTU), 1999. Shagajushhaja opora dlja transportnyh sredstv povyshennoj prohodimosti [Walking support for cross-country vehicles]. RF 2156711.
Vladimir V. Arykantsev, VSTU, Theoretical Mechanics Department, Junior Research Scientist, 28, Lenin pr., Volgograd, 400005, Russia, tel.: +7(988)497-57-75, arvstu@mail.ru
Traktory i sel'skohozjajstvennye mashiny, 4, pp.20-22. (in Russian).
10. Chernyshev, V.V., 2016. Design and underwater tests of subsea walking hexapod MAK-1. In: Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering OMAE2016, p.9.
17. Briskin, E.S. et al., 2013. Otrabotka metodov nechjotkogo upravlenija shagajushhim robotom «Ortonog» v polevyh uslovijah [Development of methods of fuzzy control of the walking robot «Ortonog» in the field]. Issledovanija naukograda, 2, pp.43-48. (in Russian).
Арыканцев Владимир Владимирович, ВолгГТУ, кафедра «Теоретическая механика», м н с., 400005, Волгоград, пр им Ленина, д. 28, тел.: +7(988)497-57-75, arvstu@mail.ru
9. Chernyshev, V.V. and Arykancev, V.V., 2015. MAK-1 – underwater walking vehicle. Robotics and Technical Cybernetics, 2, pp.45-50. (in Russian).
12. Chernyshev, V.V. and Arykancev, V.V., 2017. Tsiklovoj mehanizm shaganija s transformiruemoj traektoriej opornoj tochki [Cyclic walking mechanism with transformable reference point trajectory]. Teorija mehanizmov i mashin, 15(2), pp.71-79. (in Russian).
Вершинина Ирина Петровна, к т н., ВолгГТУ, кафедра «Теоретическая механика», доцент, 400005, Вол гоград, пр им Ленина, д. 28, тел.: +7(906)174-49-05, lady.vershinina@yandex.ru Гончаров Антон Александрович, к т н., ВолгГТУ, кафедра «Теоретическая механика», с н с., 400005, Волгоград, пр им Ленина, д. 28, тел.: +7(8442)248-113, dtm@vstru.ru Шаронов Николай Геннадьевич, к т н., доцент, ВолгГТУ, кафедра «Теоретическая механика», доцент, 400005, Волгоград, пр им Ленина, д. 28, тел.: +7(903)31-73-16, sharonov@vstu.ru
8. Briskin, E.S. et al., 2009. O pozicionnoj zavisimosti tjagovo-scepnyh svojstv shagajushhih mashin s ciklovymi dvizhiteljami [On the positional dependence of the traction and coupling properties of walking devices with cyclic actuators]. Traktory i sel'hozmashiny, 6, pp.21-25. (in Russian).
Nikolay G. Sharonov, PhD in Technical Sciences, Associate Professor, VSTU, Theoretical Mechanics Department, Assistant Professor, 28, Lenin pr., Volgograd, 400005, Russia, tel.: +7(903)31-73-16, sharonov@vstu.ru
Разработки / Developments 240
11. Volgograd State Technical University (VSTU), 2001. Shagajushhaja opora dlja transportnyh sredstv povyshennoj prohodimosti [Walking support for off-road vehicles]. RF 2207283.
Anton A. Goncharov, PhD in Technical Sciences, VSTU, Theoretical Mechanics Department, Senior Research Scientist, 28, Lenin pr., Volgograd, 400005, Russia, tel.: +7(8442)248-113, dtm@vstru.ru
14. Chernyshev, V.V., Arykantsev, V.V. and Kalinin, Ya.V., 2017. Passive foot control in cyclic walking mechanism. In: Industrial Engineering, Applications and Manufacturing (ICIEAM 2017), p. 5. DOI: 10.1109/ICIEAM.2017.8076189.15.Chernyshev,V.V.,Goncharov, A.A. and Arykantsev, V.V., 2017. Modeling of vibroimpact processes which occurs in feet changing of the walking units at viscoelastic grounds. Procedia Engineering, 176, pp.387-393. DOI: 0.1016/j.proeng.2017.02.336.16.Lapshin,V.V.,2012.Mehanika i Upravlenie Dvizheniem Shagajushhih Mashin [Mechanics and Motion Controlof Walking Devices]. Moscow: Bauman MSTU, p.199. (in Russian).
Irina P. Vershinina, PhD in Technical Sciences, VSTU, Theoretical Mechanics Department, Assistant Professor, 28, Lenin pr., Volgograd, 400005, Russia, tel.: +7(906)174-49-05, lady.vershinina@yandex.ru