Master’s Degree in Computer Engineering for Robotics and Smart Industry

Master’s Thesis
DEVELOPMENTANDCHARACTERIZATIONOFA 3DPRINTEDHEMISPHERICALSOFTTACTILE SENSORFORAGRICULTURALAPPLICATIONS
Supervisor: Candidate:
Prof.RICCARDOMURADORE FABIOCASTELLINI
Co-supervisor: Student ID:
FRANCESCOVISENTIN,PhD
VR464639
20/04/2024
1
Fabio Castellini
Thesis’motivation
The agricultural sector is facing the challenge of increasing productivity to meet the growing global food demand but is hindered by a shortage of workers due to labor-intensive tasks and poor working conditions.
To support the Agriculture 4.0 transition, we explored the field of soft robotics and grippers. By exploiting these technologies, we can rethink the way tasks are performed in agriculture, increasing efficiency and safety while keeping an eye on sustainability, food quality and handling.
 Fabio Castellini
Fabio Castellini
Master’s Degree in Computer Engineering for Robotics
20/04/2024
and Smart Industry
2
Thesis’objectives
Design and manufacture a soft tactile sensor with a suited patternof fiducial markers to be tracked;
Design a structure that can hold the sensing device in place and mountit onthe FrankaEmikaPandarobot’send-effector;
Calibrate the sensing device in order to perform online estimation of bothshear and normal forces;
Attempt a simple harvesting task exploiting the developed device within a force control loop on the gripper and an externaldepth camera mounted on the roboticarm.

Master’s Degree in Computer
20/04/2024
Engineering for Robotics and Smart Industry
3
Fabio Castellini
Master’s Degree in Computer Engineering for Robotics and Smart Industry
Designandmanufacturing
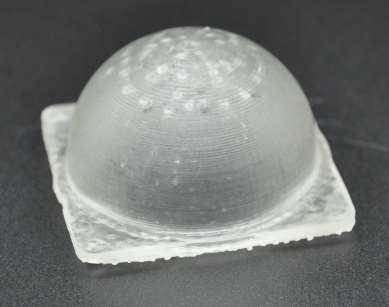
Thesofttactilesensor


20/04/2024
Left: the justprinteddome; middle: the washed dome; right: the polymerdome after curing.
4
Fabio Castellini
Master’s Degree in Computer Engineering for Robotics and Smart Industry
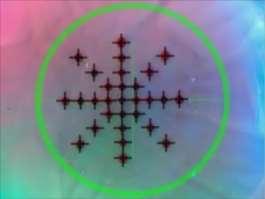
Designandmanufacturing
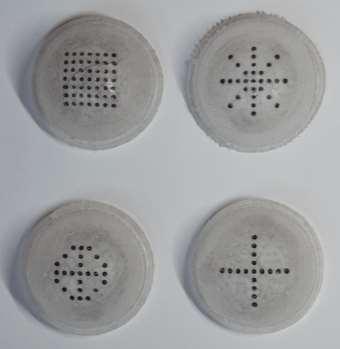
Thesofttactilesensor

20/04/2024
Left: the chosenmarkers’pattern; middle: the four analyzedpatterns; right: render of the initialprototype.
5
Fabio Castellini
Designandmanufacturing
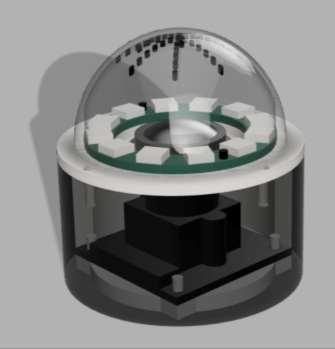
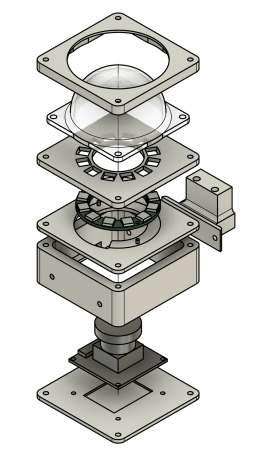
Thecustomgripper
Modular design: it allows to rethink and print a single part instead of the whole prototype, making the overall process faster and minimizing products’ waste. The final design consists in 4 flat elements, the main through hole box and the back-mount requiring a total printing time of about 5h.
Mainhardware components (sensor&gripper):
3Dprinted polymerdome (Elastic 50A Polymer Resin);
Adafruit LEDNeoPixel Ring 12 RGB
3Dprinted PLA (Polylactic Acid) case;
RGB fish-eye camera (1.7mm,5MP, 175°FoV) for RaspberryPi;
RaspberryPi 3 board;
Intel RealSenseD435idepthcamera;
Franka Emika Hand gripper and Franka Emika Panda 7-DoFrobotic arm
Fabio Castellini
Deformable dome
12RGBLEDs
Modularcase
RGBcamera
Degree in Computer
20/04/2024
Master’s
Engineering for Robotics and Smart Industry
6
Master’s Degree in Computer Engineering for Robotics and Smart Industry
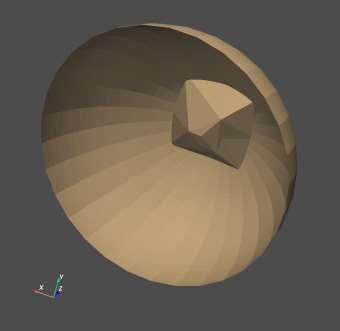
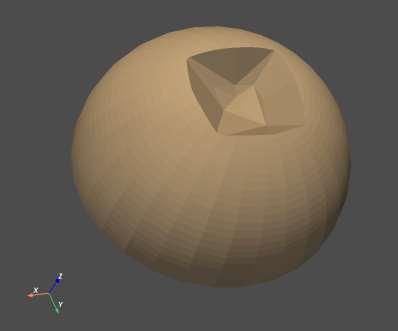
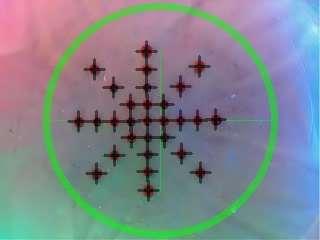
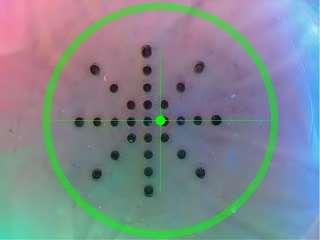
3Dshapereconstruction
20/04/2024
7
Fabio Castellini
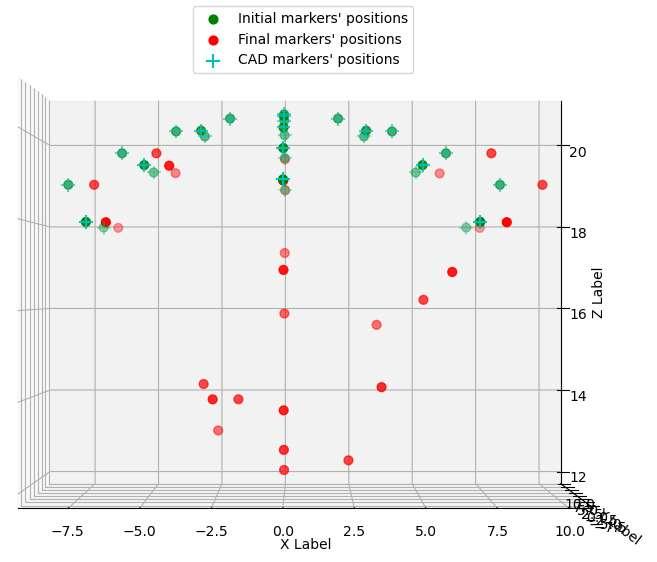
Left: 3D meshesobtained triangulating markers’ coordinates and exploiting the undeformed CADmodel;
Right: scatter plotof the initial and final estimated 3D coordinates of themarkers.
Master’s Degree in Computer Engineering for Robotics and Smart Industry
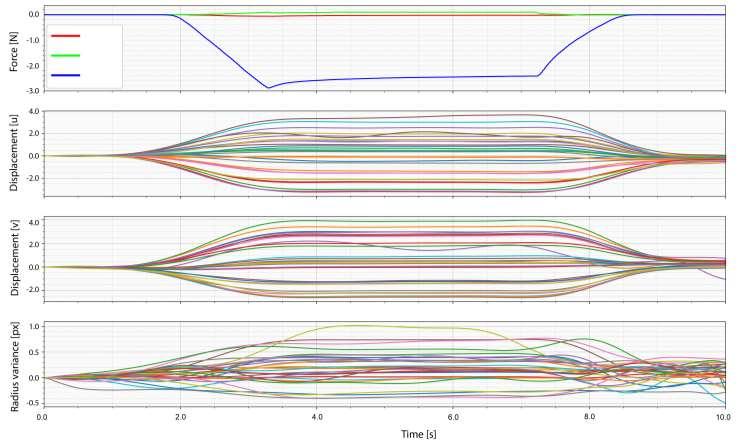
Sensorcalibration
Dataacquisition&processing

20/04/2024
8 Fx Fy Fz
Fabio Castellini
Engineering for Robotics and Smart Industry
Sensorcalibration
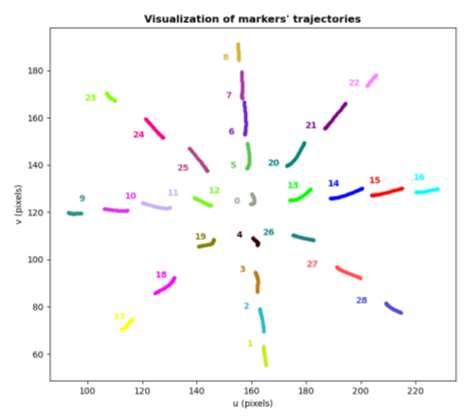
Featureextraction,selectionandmodeltraining
Extractedfeatures:
Markers’ trajectories with 8 variants(from 2 to 87 features);
Raw RGB and Binarized images (only for the Deep-CNN)
Trainedandtestedmodels:
Linearelastic force approximation;
Non-linearlycompensatedelastic force approximation;
LinearRegressionmodel
K-NeighborsRegressormodel
Support VectorRegressionmodel
NeuralNetworkSequentialmodel
DeepConvolutionalNeuralNetwork(ResNet50) model
Degree in
20/04/2024
Master’s
Computer
9
Fabio Castellini
Master’s Degree in Computer Engineering for Robotics and Smart Industry
Models’evaluation
20/04/2024
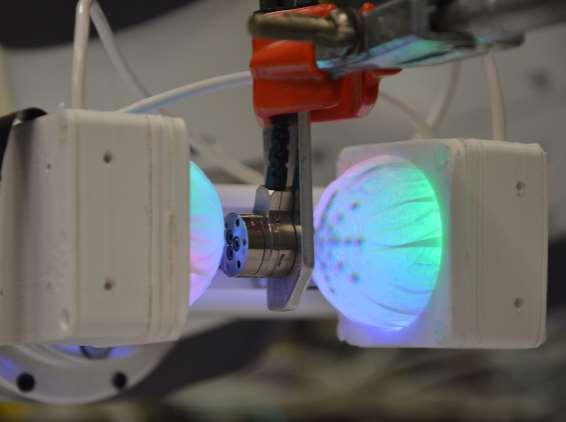
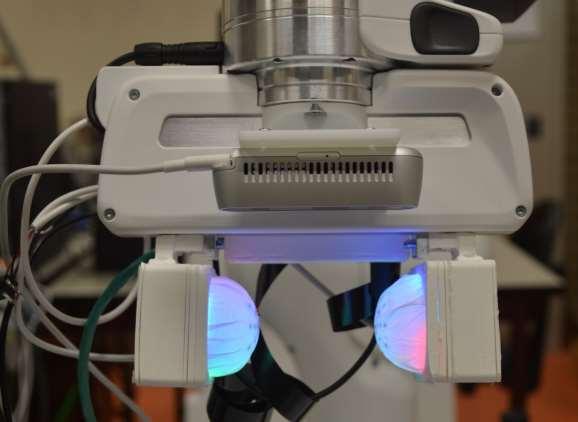
Left: the ATINano17-Eforce/torque sensorused for calibrationandvalidation; Right: our soft tactilesensorinstalledon the FrankaHand.
10
Fabio Castellini
ATI Nano 17-E
Intel RealSense depth camera
Our force sensor
Models’evaluation
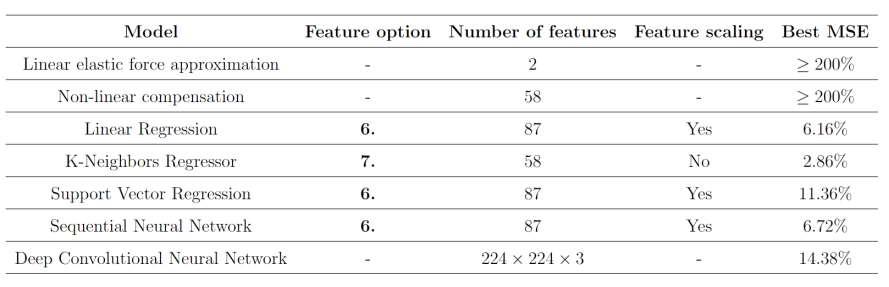
8 types of extracted features with the option of feature scaling (for a total of 16 variants);
6 models tested on numerical features; 1 Deep Neural Network tested on 2 types of inputimages;
Models’ hyperparameters were obtained through a GridSearchprocess;
KNN has found to be the best performing model according to the Mean Squared Error metric (minimum of 1,99% error when evaluating with thecustomroboticgripper)
Master’s Degree in Computer
20/04/2024
Engineering for Robotics and Smart Industry
11
Fabio Castellini
Engineering for Robotics and Smart Industry
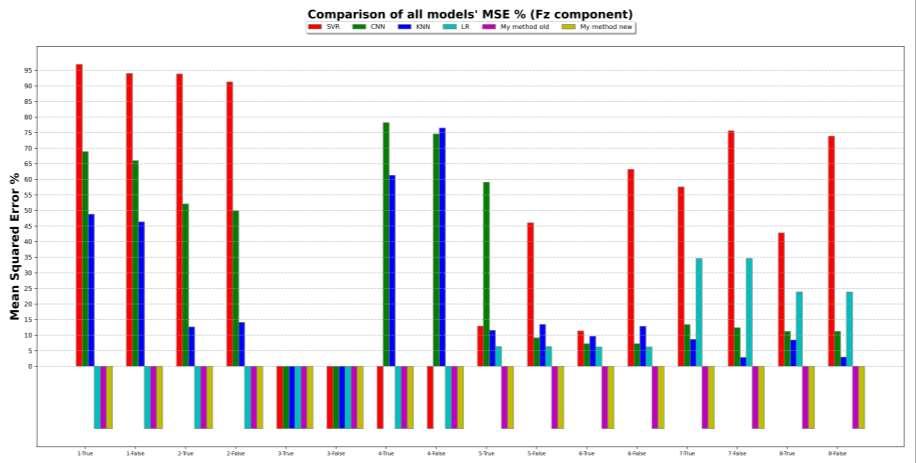
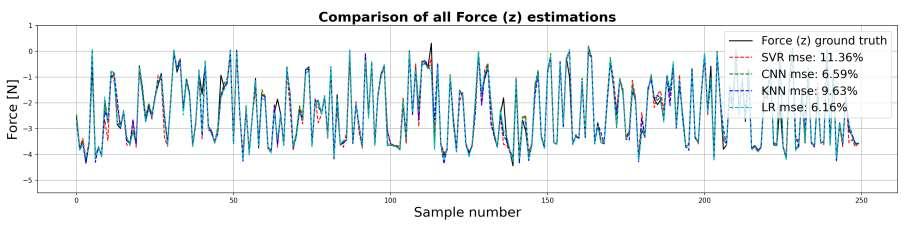
Models’evaluation
(1)
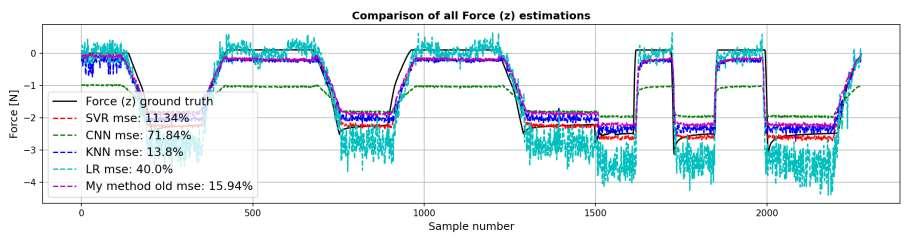
Estimatednormal forcesagainst Fz groundtruth duringthe validation(1)andtest(2)phases.
(2)
Validation: testing the trained models on the unseen portion of the dataset.
Testing: checking models’ performance when the custom gripper is installed on the Franka Emika robot
Forces are predicted along all three directions but due to how data was gathered, Fz is the component with the most variance inside the dataset.
KNN has found to be the best performing model according to the Mean Squared Error metric (minimum of 1,99% error when evaluating with the custom robotic gripper)
Master’s Degree in Computer
20/04/2024
Engineering for Robotics and Smart Industry
Fabio Castellini 13
Master’s
Computer Engineering for Robotics and Smart Industry
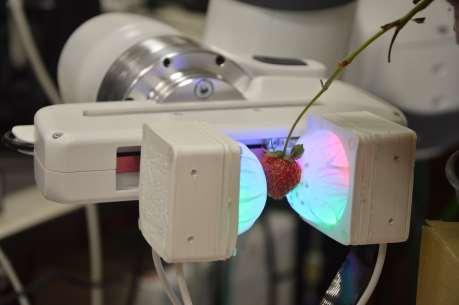
Real-timeforcefeedbackandfruitdetection
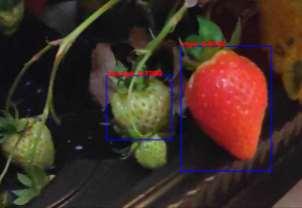



Strawberry detection (2D and 3D localization) & classification (ripe or unripe);
Trajectory planning of the manipulator keeping the gripper wide open;
Force feedback activation to allow closed loop gripper’s closure;
Harvesting of the fruit with a suited picking pattern.
20/04/2024
Degree in
14
Fabio Castellini
Master’s
Degree in Computer Engineering for Robotics and Smart Industry
Real-timeforcefeedbackandfruitdetection



Asoft,sensorizedgripperfordelicateharvestingofsmallfruits(ComputersandElectronicsinAgriculture,2023) Fabio Castellini
20/04/2024
15
Conclusions&futuredevelopments
Enrich the dataset with more samples, to improve force estimation accuracy and robustness;
Develop afullyautomatedpipelinetocalibratethesensingdevice;
Improve fruit detection training the object detection Neural Network model on a widerdataset;
Implement a more sophisticated trajectory planning of the manipulator, that might include collision avoidance; end-effector’s orientation based on the strawberry’s position; placement of the harvested strawberry in a suitable container;
Adopt another approach for 3D shape reconstruction (e.g. using a structured lightsetup and a photometric stereoalgorithm).

Master’s Degree in Computer
20/04/2024
Engineering for Robotics and Smart Industry
16
Fabio Castellini
Thanksforyourattention! Fabio
20/04/2024
Master’s Degree in Computer Engineering for Robotics and Smart Industry
17
Castellini