

DOCTORAL COURSE IN MECHATRONICS
AND PRODUCT INNOVATION ENGINEERING
Model-based methods for precise trajectory tracking in underactuated multibody systems

Ph.D. Candidate: Ing. Jason Bettega
Supervisor: Prof. Dario Richiedei
14/04/2024 1

1. Introduction and definition of underactuated mechanical systems
2. Feedback control
• Proposed Model Predictive Control formulation
• Test cases
3. Feedforward control
• Proposed inverse dynamics formulation
• Test cases
4. Conclusions

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING ➢ Agenda
14/04/2024 2
1. Introduction and definition of underactuated mechanical systems
2. Feedback control
• Proposed Model Predictive Control formulation
• Test cases
3. Feedforward control
• Proposed inverse dynamics formulation
• Test cases
4. Conclusions
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 3 ➢ Agenda
Underactuated mechanical systems characterize different engineering areas; indeed, several examples can be taken from real world applications.














DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING
Inspectionandmaintenance
CableDriven Robots 14/04/2024 4 ➢
Automotive
Pickandplacetasks
SoftRobotics
Introduction
➢ Underactuated mechanical systems
Underactuated multibody systems are characterized by having less actuators than degrees of freedom.

• Intentionally, by a mass or cost driven reduction of actuators
• Accidentally, by the failure of one or several actuators
• Structurally, due to the flexibility of light-weight components

=
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING
14/04/2024 5
�������� �� <�������� ��(��) �� �� �� �� +�� ��,�� +�� �� =����(��) �� ��
mass matrix ��(��)
generalized coordinates �� ��,��
�� ��
��
matrix ��(��)
=
= Coriolis terms
= external forces
= force distribution
= input forces
➢ Underactuated mechanical systems
Due to the underactuation property, this kind of systems can be characterized by unstable internal dynamics, which consists in the presence of Right Half Plane (RHP) zeros in the linearized counterpart, instead of Left Half Plane (LHP) ones.
Example:

Systems characterized by the presence of RHP zeros are affected by 3 main issues:
• Model inversion cannot be done exactly
• Delay in tracking responses
• Presence of undershoot
The control of underactuated mechanical systems still represents an open problem in the research field.
Feedbackandfeedforwardcontrolmustbeinvestigated.
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 6
1. Introduction and definition of underactuated mechanical systems
2. Feedback control
• Proposed Model Predictive Control formulation
• Test cases
3. Feedforward control
• Proposed inverse dynamics formulation
• Test cases
4. Conclusions
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 7 ➢ Agenda
➢ Introduction to Model Predictive Control
Among the several common controllers (LQR, Pole Placement, …), Model Predictive Control has been privileged due to two main reasons:
• its ability to achieve an optimal control input at each time step
• its capability to include constraints into the optimization problem
In particular, with the goal to achieve good performances in the presence of time-varying trajectory tracking tasks, a novel MPC formulation has been proposed, which can be represented by the following general block scheme:
Autonomous system + Underactuated system
Predictive Control
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 8
Model
��(��) ��(��) ��(��) ��(��)
?
➢ Introduction to Model Predictive Control
The following 2-dof underactuated robotic arm is considered hereinafter, although the method is general. �� = active joint �� = passive joint
τ = motor torque
1 = actuated angle
2 = non-actuated angle
• Step 1: dynamic model
Goal: perform a pick-and-place task from a starting position (pick location) to an ending one (place location), repetitively, ensuring low tracking error. (second-order dynamic model) (state-space model)

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 9
��
��
�� �� ��+�� ��,�� +�� �� =��τ ቊ���� �� =���� ���� �� +���� ��(��) ���� �� =���� ���� ��
➢ Introduction to Model Predictive Control
• Step 2: cost function
= desired output
= input weigth
The standard MPC formulation defines the desired trajectory along the prediction horizon as follows:

Butisthisdefinitionthe rightone?

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 10
��∆��
��������
�������� =�������� ��(����) where: �������� = �� �� … �� T �� = �������� −�� ������ �������� −�� +∆������∆��∆��
����
�� = predicted output
= output weigth Tracking error term Control input term
Introduction to Model Predictive Control
Through the implementation of the standard MPC formulation, the following system response is achieved:
Tracking delay


Good performances in terms of path tracking

Howtosolve thisproblem?

Bad performances in terms of trajectory tracking
• Presence of right half plane zeros (non-minimum phase system)
• Wrong definition of the desired output along the prediction horizon
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 11
➢
➢ MPC-ERD formulation
In order to overcome this issue, a novel MPC formulation (Model Predictive Control with Embedded Reference Dynamics) is proposed where the desired output along the prediction horizon is redefined through an autonomous state-space model:
where ���� is the matrix responsible for the dynamics of the reference trajectory. The evaluation of the matrix ���� is carried out through a technique known as «Dynamic Mode Decomposition», which firstly appeared in the fluid dynamics community.








Whynotapplying theseconceptsin motioncontrol?

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 12
ቊ���� ��+1 =���� ���� �� �� �� =���� ���� ��
DMD
MPC-ERD formulation
Once ���� is evaluated and ���� is chosen to make the couple (����,����) observable, the predicted reference is reformulated as follows:
where:
The huge improvement is firstly verified by comparing the predicted reference in both formulations:


Howdoestheclosedloopsystembehave?

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 13
➢
�������� =�������� ��(����)
�������� = �������� �������� �� … �������� ���� T
MPC-ERD Standard MPC
test case: experimental results
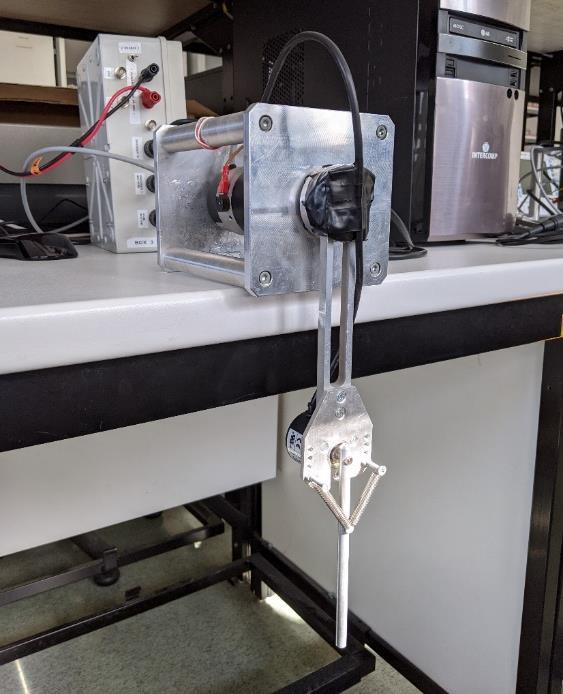
In order to fully evaluate the proposed controller, both MPC algorithms have been implemented to the real setup available in the laboratory:

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 14 ➢ 1st
Active joint Passive joint PC Acquisition board DC motor • �������� =��.������ • �������� =������������ • �������� =������������
test case: experimental results
The real tracking responses are reported in the followings, and it can be observed that the supremacy of the proposed controller has been verified.


DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 15 ➢ 1st
MPC-ERD Standard MPC
test case: experimental results
The real tracking errors are also reported for sake of completeness, showing an approximative improvement of one order of magnitude.









DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 16 ➢ 1st
MPC-ERD Standard MPC �������� =16.1���� �������� =1.53���� �������� =23.9���� �������� =2.21���� �������� =46.9���� �������� =3.13����
test case: experimental results
To have a better comprehension of the improvement achieved with the proposed control algorithm, the relative tracking responses in the Cartesian plane are here reported.


DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 17 ➢
st
1
MPC-ERD Standard MPC
➢
2nd test case: Cable Suspended Parallel Robot
To further validate the proposed control algorithm, a Cable Suspended Parallel Robot is considered, which represents a very challenging test case:
• Cable tensions greater than zero
• Proper trajectory planning (admissible workspace)
• Proper controller design (lack of positive controllability)

End-effector
= tip position, speed and acceleration, respectively
Since the dynamic of these systems is highly nonlinear, a 2-stage controller strategy is proposed. ��
= optimal cable tensions

= motor position and speed, respectively
= computed motor torques
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 18
������
��
��,��
������ ������
��,��,��
➢ 2nd test case: MPC-ERD with
CSPR
• First stage: MPC-ERD
MPC with Embedded Reference Dynamics and Embedded Integrator is adopted, with two proper modifications:
1) time-varying state-space formulation to handle nonlinearities
2) DMD is applied to each cartesian axis, to avoid rank deficient matrices, and finally ���� is achieved
• Second stage: Motor dynamics model
Once the optimal cable tensions are computed by the MPC-ERD , the commanded motor torques are computed through an inverse-dynamic approach considering the dynamic model of each actuator:
The desired accelerations
obtained through inverse kinematics of the load reference trajectory.
Howarethetrajectorytrackingperformancesofthiscontroller?
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 19
���� �� = መ �������� ������ �� + መ ����,������ ������ �� +�������� ������(��)
���� ������ �� and speeds ���� ������ ��
are
2nd test case: numerical results
Both standard MPC formulation with embedded integrator and MPC-ERD have been tested in this scenario and their tracking results are here reported.


DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 20 ➢
➢ 2nd test case: numerical results
In particular, these results have been achieved by embedding the motor characteristic curve as an additional constraint.

By looking at the cable tensions it can be noticed that MPCERD is able to achieve good trajectory tracking performances while ensuring proper safety conditions.

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 21
➢ MPC-ERD: key aspects
Summarizing, thanks to the proposed MPC-ERD algorithm:
✓ Dynamic model of the underactuated system is embedded into the controller design
✓ Input constraints are embedded into the controller design, achieving an optimal constrained solution
✓ Reference dynamics are embedded into MPC-ERD, allowing for a better control evaluation during the prediction horizon
Increased safety level
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 22
❖
❖
Increased performances
1. Introduction and definition of underactuated mechanical systems
2. Feedback control
• Proposed Model Predictive Control formulation
• Test cases
3. Feedforward control
• Proposed inverse dynamics formulation
• Test cases
4. Conclusions
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 23 ➢ Agenda
➢ Feedforward formulation
The control of underactuated systems usually lead to the following challenges: Control of non minimum phase systems Feedforward computation through inverse dynamics








To solve inverse dynamics, a feedforward method has been proposed, which consists of six steps:
1) Partitioning of the nonlinear dynamic model into actuated and unactuated coordinates (through QRdecomposition)
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 24
?
MPC-ERD
������(��) ������(��) ������ �� (��) ������(��) ���� ���� + ����(��,��) ����(��,��) = ����(��,��) ����(��,��) + ����(��) �� �� Mass matrix Coriolis vector External forces vector Input distribution vector
2) Linearization of the desired output �� and exploitation of the linearly combined output technique
3) Evaluation of the internal dynamics
4) Selection of the parameter �� to make the internal dynamics stable and evaluation of
through a differential approach
5) Evaluation of ��
,���� thanks to the nonlinear kinematic equations
6) Evaluation of the feedforward input forces through an algebraic approach

Istheproposedtechniqueeffective?
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 25 ➢ Feedforward
formulation
���� = ������ −������ �� ෩ ���� −1 ���� −���� −������ �� Г���������� ������ �� ∙���� +������ ∙���� +���� =���� ���� =Г���������� − ෩ ���� ∙���� ෩ ���� =��∙����
����,����
��
,��
��
��,��
�������� =���� −�� ∙ ������ ∙���� +������ ∙���� +���� −����
experimental results
The enhanced feedforward technique has been tested both numerically and experimentally on a 2-dof underactuated robotic arm with the goal to perform a pick-and-place task, considering different opening angles and including steady intervals. The experimental results confirm the correctness of the model inversion.

Andiftherequiredcontrolforcescannotbedirectlyapplied?
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 26 ➢
1st test case:
➢ Trajectory planning
Usually, industrial robots are designed in such a way that the control torques/forces cannot be directly modified.
To overcome this issue, the differential part of the proposed inverse dynamics method can be used for trajectory planning purposes.
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 27
Controller
���� ������ �� �� ���� ���� �� ����,���� ?
Plant
Enhanced model inversion �������� �������� ���� ������ ���� ������
test case: experimental results
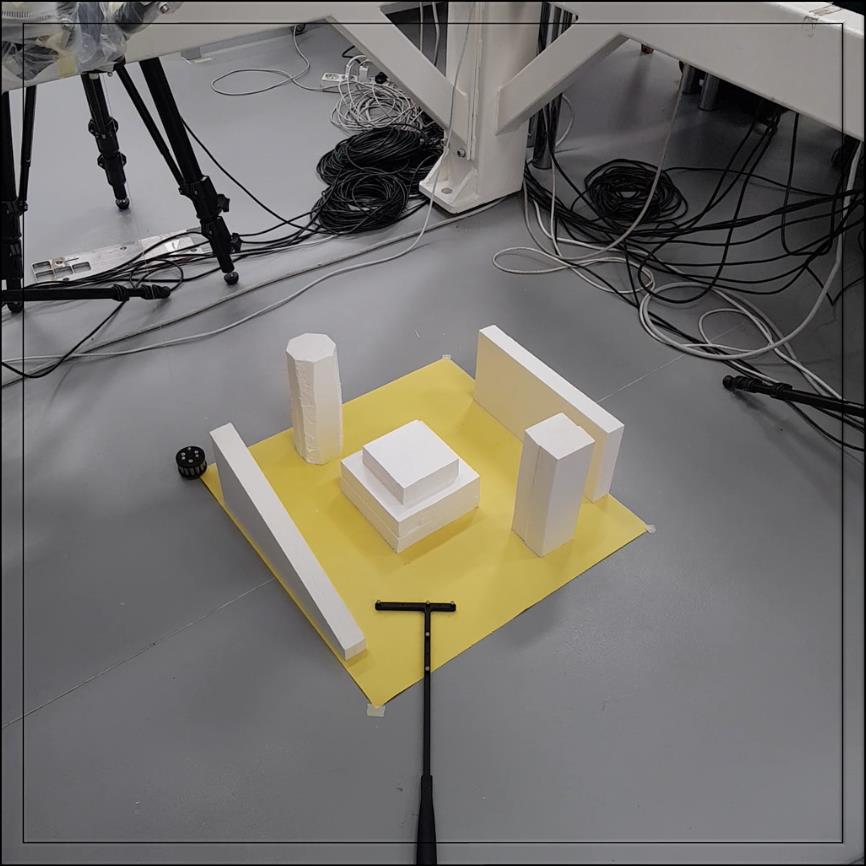
The proposed trajectory planner has been experimentally validated considering a pendulum moved by a parallel robot (Adept Quattro) which emulates an overhead cartesian crane.

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 28 ➢
2nd
test case: experimental results
The proposed trajectory planner has been experimentally validated considering a pendulum moved by a parallel robot (Adept Quattro) which emulates an overhead cartesian crane. Considering underactuation (proposedmethod) Neglecting underactuation

DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 29 ➢ 2
nd
1. Introduction and definition of underactuated mechanical systems
2. Feedback control
• Proposed Model Predictive Control formulation
• Test cases
3. Feedforward control
• Proposed inverse dynamics formulation
• Test cases
4. Conclusions
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 30 ➢ Agenda
Conclusions
✓ A general frame for motion control of underactuated systems has been developed by focusing the attention on:
Feedback Control (MPC-ERD)
Feedforward Control
(Inverse dynamics)
✓ Additionally, the attention has focused on fully-actuated systems, such as Cable Driven Robots, due to their challenging nature, that could lead to the presence of underactuated systems if cable tensions would become negative.
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 31 ➢
1) Bettega J., Richiedei D., Trevisani A., Path tracking in cable suspended parallel robots through position-dependent model predictive control with embedded integrator, Proceedings of the 10th Eccomas Thematic Conference on Multibody Dynamics(2021)
2) Araújo J.M., Bettega J., Dantas N.J.B., Dórea C.E.T., Richiedei D., Tamellin I., Vibration control of a two-link flexible robot arm with time delay through the robust receptance method, Applied Sciences (2021)
3) Bettega J., Richiedei D., Trevisani A., Using pose-dependent model predictive control for path tracking with bounded tensions in a 3DOF spatial cable suspended parallel robot, Machines (2022)
4) Bettega J., Richiedei D., Trevisani A., Feedforward control of a nonlinear underactuated multibody system, Recent Trends in Wave Mechanics and Vibrations. WMVC 2022. Mechanisms and Machine Science (2023)
5) Bettega J., Richiedei D., Tamellin I., Trevisani A., Motion Planning Through Model Inversion for a Gantry Crane Moving a Double Pendulum. In: Petrič, T., Ude, A., Žlajpah, L. (eds) Advances in Service and Industrial Robotics. RAAD 2023. (2023)
6) Bettega J., Richiedei D., Trajectory tracking in an underactuated, non-minimum phase two-link multibody system through model predictive control with embedded reference dynamics, Mechanism and Machine Theory (2023)
7) Bettega J., Boschetti G., Piva G., Richiedei D., Trevisani A., Reconfiguration strategy for fully actuated translational cable-suspended parallel robots, Frontiers in Robotics and AI (2023)
8) Bettega J., Piva G., Richiedei D., Trevisani A., Model predictive control for path tracking in cable driven parallel robots with flexible cables: collocated vs. noncollocated control. Multibody Syst Dyn (2023)
9) Bettega J., Richiedei D., Tamellin I., Trevisani A., Integrated Inverse Dynamics and Optimized Mechanical Design in Underactuated Linear Vibratory Feeders Under Periodic Excitation. J. Vib. Eng. Technol. (2023)
10) Bettega J., Richiedei D., Tamellin I., Trevisani A., Model Inversion for Precise Path and Trajectory Tracking in an Underactuated, Non-Minimum Phase, Spatial Overhead Crane. J. Vib. Eng. Technol. (2023)
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING 14/04/2024 32 ➢ Publications
DOCTORAL COURSE IN MECHATRONICS AND PRODUCT INNOVATION ENGINEERING

Thank you for your attention


14/04/2024 33
