IVAN

MECÂNICA DE OLIVEIRA

Mecânica
© 2023IvandeOliveira
EditoraEdgardBlücherLtda.
Publisher EdgardBlücher
Editores EduardoBlüchereJonatasEliakim
Coordenaçãoeditorial AndressaLira
Produçãoeditorial LidianePedrosoGonçalves
Revisãodetexto MaurícioKatayama
Capa LaércioFlenic
Imagemdacapa iStockphoto
EditoraBlucher
RuaPedrosoAlvarenga,1245,4º andar CEP04531-934–SãoPaulo–SP–Brasil
Tel.:55113078-5366
contato@blucher.com.br www.blucher.com.br
SegundooNovoAcordoOrtográfico,conforme6.ed.do VocabulárioOrtográficodaLíngua Portuguesa,AcademiaBrasileiradeLetras,julhode2021.Éproibidaareproduçãototalou parcialporquaisquermeiossemautorizaçãoescritadaeditora.Todososdireitosreservados pelaEditoraEdgardBlücherLtda.
DadosInternacionaisdeCatalogaçãonaPublicação(CIP)
AngélicaIlacquaCRB-8/7057
Oliveira,Ivande
Mecânica/IvandeOliveira.—SãoPaulo:Blucher,2023. 370p.
Bibliografia
ISBN978-65-5506-761-3
1.Mecânica2.Física3.MatemáticaI.Título 23-1333
Índiceparacatálogosistemático:1.Mecânica
CDD531
Algunsconceitoscomoposição,velocidadeeaceleraçãosãofundamentaisparao entendimentoeparaadescriçãodomovimento,sejadeumpontomaterialou deumcorporígido.Dessaforma,nasseçõesqueseguemiremosdescreveresses conceitos.
Adescriçãodomovimentodeumapartículaoudeumcorporígidotemcomo princípiofundamentalalocalizaçãosejadapartículaoudaspartículasquecompõemocorporígidonoespaço.Entretanto,essalocalizaçãodeveserfeitacom basenoquechamamosdereferencial.
Umreferencialéumsistemadecoordenadasqueserveparaindicaraposição daspartículasnoespaço.Umrelógiotambémdeveserconectadoaessesistema decoordenadasparaindicarotempo,assimpodemosdescreveromovimento,ou seja,amudançadaposiçãocomtempoecomrelaçãoaumdadoreferencial.
Umreferencialquesemovimentacomvelocidadeconstanteéchamadode referencialinercial.Nessereferencialoscorpossemovimentamlivresdeforças externas.
Aimportânciadedefinirmosreferencialsetraduz,porexemplo,nadefinição doconceitoderepouso.Quandoavelocidademedidaporumobservadoremum sistemadereferênciainercialfornula,dizemosqueoobjetoestáemrepouso.
Ovetorposiçãoéumvetorquelocalizaopontomaterialnoespaçoemrelação aumdadoreferencial.NaFig.1.1temososvetores r1 e r2 localizandooponto materialemrelaçãoàorigemdosistemadecoordenadas.Oconjuntodepontos ocupadosnoespaçopelopontomaterialaolongodotempodefinimoscomosendo atrajetória C desseponto.
Utilizandoascoordenadascartesianas,osvetores r1 e r2,emrelaçãoàorigemdo sistemadecoordenadas,sãodadospor,
sãoosvetoresunitáriosaolongodoseixos x, y e z,respectivamente.
Consideremosagoraqueopontomateriallocalizadopelovetor r1 mudede posição,sendoagoralocalizadopelovetor r2.Definimoscomosendoovetor deslocamentoovetor ∆r ,queémostradonaFig.1.2,equerepresentaamudança daposiçãoaolongodatrajetória.
UtilizandoasEqs.(1.1)e(1.2),podemosaindaescreverque
respectivamente.
Oconceitodevelocidadeéamplo,podendoseraplicadoadiferentessituações eemdiferentesáreasdoconhecimento.Usamosoconceitodevelocidade,por exemplo,naquímica(velocidadedereação),nabiologia(taxadecrescimentos deseresvivos)naeconomia(taxadecrescimentooudereduçãodoPIB),entre outras.Dessaforma,intuitivamentepodemosperceberqueavelocidadeestá associadaàrapidezcomquealgumfenômenovariacomotempo.Comoestaremos interessadosnadescriçãodomovimentodeumobjeto,avelocidadenosdaráa informaçãodarapidezcomquevariaaposiçãodesseobjetonotempo.Dessa
ÉimportantenotarmosqueoladodireitodaEq.(1.12)éadefiniçãodaderivada deumafunção.Sendoassimavelocidadeficasendodefinidacomoataxade variaçãodaposiçãocomrelaçãoaotempo,ouseja,
onde vx, vy e vz sãoascomponentescartesianasdovetorvelocidade.
AEq.(1.7)nosdizqueadireçãoeosentidodovetorvelocidadeficamdeterminadospelovetordeslocamento ∆r.Paraentendermosumpoucomaissobreo vetorvelocidadevamosanalisaraFig.1.3,emquealinhatracejadarepresenta ovetordeslocamentoparadiferentesinstantesdetempo.PelaFig.1.3podemos perceberque,àmedidaqueointervalodetempo, ∆t,diminuiovetorvelocidade vaiseaproximandodeumaretatangenteaoponto P.Issoquerdizerque,quando ∆t → 0,ovetorvelocidadepassaasertangenteàtrajetória.
Essasobservaçõespodemsergeneralizadasparaqualquertipodetrajetória, ouseja,podemosafirmarqueovetorvelocidadeésempretangenteàtrajetória percorridapeloobjetoemquestão.
Exemplo1.3.1
Omovimentodepartículanoespaçoédescritopelovetorposição r como funçãodotempodaseguinteforma:
a)Encontreovetorvelocidadecomofunçãodotempo.
b)Descrevaatrajetóriadescritapelapartícula.
Umdosgrandesdesafiosdohomemsemprefoiodeentenderedescreverosfenômenosdanatureza.Atarefa,namaioriadasvezes,dedescreveressesfenômenos foidadaaoscientistas.Umdosmaiorescientistasquesededicouaexecutaressa tarefafoi SirIsaacNewton.AsideiasdeNewtonacercadeváriosfenômenos danaturezasãoválidasatéosdiasdehoje.Newtoncontribuicomaevolução dopensamentocientíficoemdiferentesáreasdoconhecimento.Muitosdosfenômenosdanaturezapodemserdescritosporumconjuntodetrêsleisconhecidas comoasleisdeNewton,quesão:
Primeiralei :“Todocorpotendeapermaneceremrepousoouasemovimentar emumalinharetacomvelocidadeconstanteamenosqueumaforçaseja aplicadosobreele.”
Segundalei :“Aforçaresultantequeatuaemumcorpoéigualataxadevariação domomentolinear”,ouseja,
onde p = mv éomomentolinear,com v sendoavelocidadee m amassa.
Terceiralei :“Atodaaçãocorrespondeumareaçãodemesmaintensidadee mesmadireção,porémdesentidocontrário.”
Exemplo2.0.1
Emumapartículademassa m = 1 kgatuaumaforçaconstante F que modificaavelocidadedapartículade v1 = 2 ˆ i 3 ˆ j + 2 ˆ k m/spara v2 = 6 ˆ i + 4 ˆ j 5 ˆ k m/sem2segundos.Qualomódulodessaforça?
SOLUÇÃO: Aforça F nointervalodetempo ∆t podeserdeterminadapor
AsleisdeNewtonestãofortementerelacionadasaoconceitodeforça.Aprimeira leiafirmaquenaausênciadequalquerforça(ação)ocorpomantémseuestado, ouderepousooudemovimentoemlinharetacomvelocidadeconstante.Jáa segundaleireferequeaaçãoéoagenteprovocadordamudançadomomento linear p.Aterceiraleinosdizque,quandoaaçãoocorresobreumcorpo,ele reageaessainteraçãoprovocandoumaaçãoigual,opostaenamesmadireção. Aessaaçãochamamosdeforça,ouseja,forçaéumaaçãoquepodemodificaro estadodeumcorpoe/oudeformá-lo.
Aforçaresultante(FR)éasomavetorialdetodasasforçasqueatuamnocorpo. Matematicamenterepresentamospor
onde Fi,com i = 1 ··· n,sãoasforçasqueatuamnocorpo.Asforçasdevem sersomadasseguindoasregrasdaálgebravetorial.Paraocasodeduasforças, F1 e F2,quesãoaplicadasnomesmoponto,comomostradonaFig.2.1,aforça resultantepodeserfacilmentedeterminada.
ConsiderandoaFig.2.1éfácilperceberque
OmódulodaforçaresultanteparaasforçasmostradasFig.2.1édadopor
Expandindooladodireitodarelaçãoacimaerearranjandoostermos,temosque omódulodaforçaresultanteficaentãodeterminadopor
VamosvoltaràdefiniçãodeforçaresultantedadapelaEq.(2.2)eescrevero ladoesquerdodaseguinteforma:
onde FRx, FRy e FRz sãoascomponentescartesianasdaforçaresultante.Dessa maneiraascomponentesdaforçaresultante,Eq.(2.2),podemserdeterminadas por
OladodireitodasEqs.(2.8)-(2.10)indicaquepodemosdecomporcadaumadas forças, F1, F2, F3, ··· Fn,nasrespectivasdireções x, y e z paraencontrarmosas componentes FRx, FRy e FRz e,consequentemente,determinarmosomóduloda forçaresultanteapartirde
Consideremosagoraqueumadeterminadaforçademódulo F sejaaplicadaao longodasualinhadeaçãodefinidapelaretaquepassapelosponto A(x1, y1, z1) e B(x2, y2, z2) comoindicadosnaFig.2.2etendoosentidodoponto A paraoponto B.Conhecendoomódulodaforçaeospontosquepertencemàlinhadeaçãoda força,podemosentãodeterminarovetor F daseguintemaneira:
(2.12) onde ˆ λ éumvetorunitárioaolongodalinhadeaçãodaforça.
AsleisdeNewtonpossuemumvastocampodeaplicações,porémonossointeresse aquiestáemutilizaressasleisnadescriçãodoequilíbriodepontosmateriaisassim comodecorposrígidos,ouseja,discutiremososconceitosdaestática.
Aestáticatemcomofundamentoascondiçõesdeequilíbrio.Analisandoasleis deNewton,pode-seperceberqueacondiçãodeequilíbrioestáticoocorrequando FR = 0,eainda v = 0,ouseja,quealémdaforçaresultantenulaocorpodeveestar emrepousoemrelaçãoaumdeterminadoreferencial.Entretantoessacondição sógarantequenãohaverámovimentodetranslação,porémocorpopodeainda terummovimentoderotação.Dessaforma,paraqueocorpoestejaemequilíbrio estático,tantoomovimentodetranslaçãoquantooderotaçãonãopodemexistir. Paragarantirmosquenãoocorraomovimentoderotaçãodocorpo,devemos imporacondiçãodequeomomentodaforçaresultante(outorqueresultante) sejatambémnulo.
Nasseçõesqueseguemiremosprimeiramentedefiniroconceitodecentrode massae,comoconsequência,oconceitodepontomaterial.Alémdisso,descreveremoscomodeterminarocentrodemassaparaumadistribuiçãodiscretae paraumadistribuiçãocontínuademassa.Umavezdefinidooconceitodeponto material,descreveremosascondiçõesdeequilíbrioparaospontosmateriais.Em seguidaestudaremosoequilíbriodoscorposrígidose,paraisso,definiremoso conceitode momentodeumaforça ousimplesmente torque
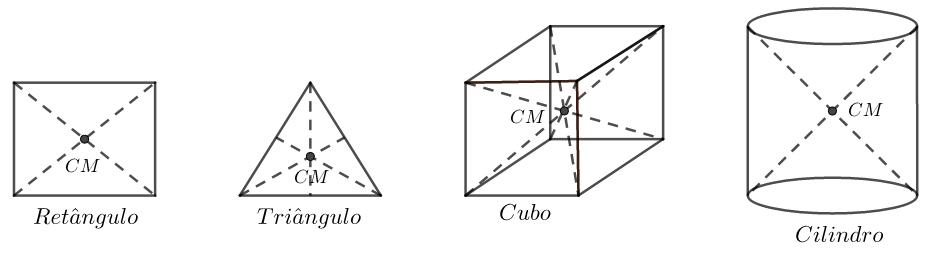
Ocentrodemassadeumcorpoédefinidocomosendoopontodocorpoonde podemosconsiderarquetodaamassadessecorpoestálocalizada.Ocentrode massatempapelimportantenadescriçãodomovimentoetambémemsituações deequilíbrio.Paraummelhorentendimentodadefiniçãodecentrodemassa, consideramosaFig.3.1,ondemostramosalgumasfigurassimétricaseuniformes.
Ficaclaroqueocentrodemassadefiguras(comdistribuiçãouniformede massa)quepossuemumeixodesimetriaestálocalizadoaolongodesseeixo. Entretanto,paracorposcujasimetrianãosejatãoevidente,ascoordenadasdo centrodemassapodemserdeterminadasutilizandoocálculodiferencialeintegral. Nasseçõesqueseguemdescrevemoscomodeterminarascoordenadasdocentrode massaparadiferentessistemas.Umcorpodemassauniformepodeserequilibrado apoiando-onocentrodemassa.
Nestaseçãodescreveremoscomodeterminarocentrodemassaparadiferentessistemas,taiscomo:conjuntodepartículasdiscretas,distribuiçãolineareuniforme demassa,figurasplanasedesólidosderevolução.
ConsidereadistribuiçãodemassamostradanaFig.3.2,onde mi representaa massadecadapartículae (xi, yi) aposiçãodamassaemrelaçãoaoseixos x e y
Ascoordenadas, (xcm, ycm),docentrodemassaparaosistemadepartículas mostradonaFig.3.2sãodefinidascomosendo
Exemplo3.2.1
Considerequeaspartículasdemassas m1=10kg, m2=25kge m3=15kg estãolocalizadasaolongodoeixo x nospontos x1=2m, x2=4me x3=12 m,respectivamente.Determineascoordenadasdocentrodemassapara essesistemadepartículas.
SOLUÇÃO: Comoaspartículasestãolocalizadasaolongodoeixo x ficafácil perceberque ycm=0e zcm=0.Agoraacoordenada xcm édadapor
NaFig.3.3mostramosalocalizaçãodocentrodemassaparaosistemadepartículasdemassas m1=10kg, m2=25kge m3=15kg.
Umpontoimportanteaquiquedevemosnotarpeloresultadodoexemplo3.2.1 équeocentrodemassaestarálocalizadoemumpontopróximoàregiãodemaior concentraçãodemassa.ConsideremosaFig.3.4,ondeapartículademassa m2 é muitomaiorque
2 >> m1.
UtilizandoaEq.(3.1)paraocentrodemassaaolongodoeixo x,temos
ouseja,ocentrodemassasempreestarámaispróximoderegiõesondepossuia maiorconcentraçãodemassa.
Paradeterminarmosocentrodemassadeumadistribuiçãolineardemassa,utilizaremosadefiniçãodecentrodemassaparaumsistemadepartículasdescritona seçãoanterior.ConsideremosadistribuiçãolineardemassamostradanaFig.3.5.
Amassa m dalinhaestádistribuídauniformementeaolongodocomprimento total L.
AsleisdeNewtonpodemserutilizadasparaadescriçãodadinâmica(movimento) deumpontomateriale/oudeumcorporígido.Adescriçãodomovimentoque seráfeitanestecapítuloéaquelaquechamamosdedescriçãoclássica,ouseja, quandoosefeitosrelativísticosequânticosnãosãoconsiderados.
Consideremosqueumpontomaterialsemovimentaemumatrajetóriaretilínea aolongodeumadadadireção,porexemplo,adireção x.Levemosemconsideraçãoaindaqueaforçaresultantesobreopontomaterialénula,ouseja, FR = 0. AplicandoagoraasegundaleiEq.(2.1)paraessecasotemos
Éimportantenotarque,comoconsequênciadaforçaresultantenula,omovimento sedácomvelocidadeconstantee,nessecaso,aposiçãodopontomaterialpode serdeterminadaaolongodotempopor
onde x0 éaposiçãonoinstantedetempo t = 0 medidaemrelaçãodoponto O, origemdosistemadereferência.Aposiçãoemfunçãodotempoparaumponto materialemmovimentocomvelocidadeconstanteémostradonaFig.4.1.Afigura v > 0 indicaqueomovimentosedánamesmaorientaçãodatrajetória,já v < 0 indicamovimentonosentidocontrárioàorientaçãodatrajetória.
Naseçãoanteriormostramosque,quandoomovimentoocorrenacondiçãode forçaresultantenula,omesmosedácomvelocidadeconstante.Agoravamoslevar emconsideraçãoqueaforçaresultantenãovaria,ouseja,queelaéconstante.
SendoassimaEq.(2.1)podeserescritacomo
ComoFR éconstante,éfácilperceberqueoladoesquerdodaEq.(4.5)também seráumaconstante,pois m éamassa.Dessamaneirapodemosdizerqueataxade variaçãodavelocidadecomotempo,ouseja,aaceleração,éconstante.Issoquer dizeraindaqueomovimentosedácomaceleraçãoconstante.Nessascondições aevoluçãotemporaldavelocidadeficasendodeterminadadaseguintemaneira:
Graficamenteavelocidadeemfunçãodotempoparaomovimentocomaceleração constanteestárepresentadanaFig.4.2paraoscasos a > 0 e a < 0.
Umavezqueconhecemosavelocidade,Eq.(4.8),podemosencontraraposição emfunçãodotempodaseguinteforma:
Assimcomofoifeitoparaavelocidade,podemosrepresentargraficamenteaposiçãoemfunçãodotempo.NaFig.4.3temosaevoluçãotemporaldaposição, Eq.(4.12),quando a > 0 e a < 0.Umpontoimportanteaquiéqueográficodo movimentofoiobtidoatravésdaEq.(4.12),porémpodemosobterinformações acercadomovimentofazendoumaanálisesomentedosgráficos v × t ou x × t sem oconhecimentodaleiqueescreveomovimento.Maisadiantemostraremoscomo essaanálisepodeserfeita.
AsEqs.(4.8)e(4.12)sãoasevoluçõestemporaistantodavelocidadequando daposição,ouseja,sãoequaçõesqueenvolvemagrandezatemponadescriçãodo movimento.Entretantoemalgunscasosnãotemosoconhecimentodagrandeza tempoparaadescriçãodomovimento.Nessecasoéinteressantetermosuma equaçãoquenãoenvolvaotempo.ParaissovamosconsiderarqueaEq.(2.1) possaserescritadaseguinteforma:
Considerandoaindaqueaforçaresultantenãovariaeque FR/m determinaa aceleração,temos
Sabendo-seque v0 éavelocidadenaposição x0,encontramosovalordaconstante C e,comisso,conseguimos
com ∆x = x x0 sendoodeslocamento.Éimportantenotarqueagoraavelocidade ficarelacionadaàposição,enãoàgrandezatempo.
MuitosdosproblemasquesãoresolvidosutilizandoasegundaleideNewton, Eq.(2.1),pressupõemoconhecimentodaforça,sejaelacomofunçãodotempo F (t) oudaposição F (x, y, z).Entretanto,nocasodeproblemasemquenãoseconhece aforça,aindaépossívelresolvê-los.Aresoluçãodessetipodeproblemaépossível conhecendoalgumaspropriedadesdaforçaqueatuanosistema.Osconceitosde trabalhoeenergiasãoferramentasquepermitemconhecertaiscaracterísticase dessaformaaresoluçãodessesproblemas.
ConsidereaFig.5.1,ondeumaforça F éaplicadaaumpontomaterial.Consideremosaindaque,devidoàaçãodaforça,opontomaterialdesloca-sedoponto a aoponto b aolongodatrajetória C.
Figura5.1: Forçaaplicadaaolongodeumatrajetória C sobreumapontomaterial.
Definimosotrabalhodeumaforçaaolongodeumatrajetória C comosendo
(5.1)
onde F éaforçaaplicadae dr odeslocamentoaolongodatrajetória.Nosistemainternacionaldeunidades(SI)aunidadeparaagrandezatrabalhoéoNm (Newton×metro),quetemcomoequivalênciaoJoule(J),ouseja,1Nm=1J.O
trabalhodeumaforçaéumagrandezaescalare,porisso,podeserpositivo, negativoounulo.Para 0 ≤ θ < 90o,otrabalhodaforçaserápositivo,porém, quando 90o < θ ≤ 180o,otrabalhoseránegativo.Jáparaforçasperpendiculares (θ =90o)àtrajetóriaotrabalhoseránulo.Otrabalhorealizadopelaforçapode serinterpretadocomosendoamedidadavariaçãodaenergiadopontomaterial, ouseja,quando W > 0 aforçaprovocouumaumentonaenergiadopontomaterial;quando W < 0 aforçafoiresponsávelpeladiminuiçãodaenergiadoponto material;jáquando W = 0 aforçanãoprovocavariaçãodaenergiadoponto material.Sendoassimotrabalhodeterminaatransferênciadeenergia.
AEq.(5.1)determinaotrabalhodeumaúnicaforça,entretantoparaum sistemadeforçasotrabalhodaforçaresultanteficasendo
Levando-seemconsideraçãoqueaforçaresultante FR podeserescritacomoa Eq.(2.2),ouseja,
ÉimportantenotarquecadaumdostermosdoladodireitodaEq.(5.4)representa otrabalhodecadaumadasforçasqueatuamindividualmentenosistemae,dessa forma,otrabalhodaforçaresultadaficadeterminadopor
medidasemmetros,determineotrabalhorealizadopelaforça
SOLUÇÃO: Comoaforçaqueatuasobreapartículaéconstante,otrabalhopode serdeterminadopor
Exemplo5.1.2
Considereaforça F = ky
i,com k sendoumaconstantepositiva,edetermine otrabalhorealizadoporessaforçaparairdoponto O paraoponto A ao longodoscaminhos C1 e C2 mostradosnaFig.5.2.
SOLUÇÃO: Otrabalhorealizadopelaforçaaolongodeumcaminho C édeterminadopor
Comoocaminho C1 éumareta,temosque
C1 éiguala
C2
Otrabalhoaolongocaminho C2 éiguala
Aolongodotrecho Oa aforçaézero,entãoaprimeiraintegralénula.Jápara otrecho aA,comoaforçaéperpendicularaodeslocamento,aintegraltambémé
ln(M.N)= ln M + ln N
ln M N = ln M ln N
sin2 a + cos2 a = 1
sin2a = sin a cos a
cos2a = cos2 a sin2 a
tan2 a + 1 = sec2 a
sin(a ± b)= sin a cos b ± cos a sin b
cos(a ± b)= cos a cos b ∓ sin a sin b
tan(a ± b)= tan a ± tan b 1 ∓ tan a tan b
sin a + sin b = 2sin a + b 2 cos a b 2
sin a sin b = 2cos a + b 2 sin a b
ln(M)q = p ln M logb M = loga M loga b
cos a + cos b = 2cos a + b 2 cos a b 2
sin a sin b = 2sin a + b 2 sin a b 2
Somaesubtração
(a + ib) ± (c + id)=(a ± c)+(b ± d)ii = √ 1
Multiplicação
(a + ib)(c + id)=(ac bd)+(ad + bc)ii = √ 1
Divisão
a + ib
c + id = a + ib c + id c id c id = ac + bd c2 + d2 + bc ad c2 + d2 ii = √ 1
Formapolardeumnúmerocomplexo
x = r cos θ y = r sin θ
x + iy = r(cos θ + i sin θ )
xéaparterealey,aparteimaginária donúmero (x + iy)
r = x2 + y2
RelaçãodeEuler
cos θ = eiθ + e iθ 2
Complexoconjugado
(i)∗ = i (∗)complexoconjugado
(x + iy)∗ =(x iy)= re iθ
B s
v ou v –Grandezavetorial
A –Origemdovetor
B –Extremidadedovetor
Direçãodovetor –odareta s
B.1 Representaçãodegrandezasvetoriais v A
Sentidodovetor –deAparaB
Módulodovetor –igualàdistânciaentreospontos A e B
B.2.1 Somaesubtraçãodevetoresgeometricamente
Oponto P podeserlocalizadonoespaçopelovetor
ρ sendoovetorunitárioaolongodoraioedadopor
Acomponentedeumvetor A éaprojeçãodessevetoraolongodeumadada direção.NaFig.B.2ovetor A noespaçotemcomocomponentescartesianas
Componentesdeumvetor.
NaFig.B.3ovetor A noplano xy temadireçãodefinidapeloângulo θ esuas componentes x e y são
sendo θ adireçãodovetor A emrelaçãodoeixo x.
Oprodutoentrevetorespodeserfeitodeduasformasdistintas,quesãochamadas deprodutoescalareprodutovetorial.Adiferençafundamentalentreeleséque oprodutoescalartemcomoresultadoumescalarquepodeserpositivo,negativo ounulo,jáoprodutovetorialtemcomoresultadoumvetor.
Mecânica é um livro que apresenta os conceitos descritos pelas leis de Newton. Os assuntos relacionados à mecânica Newtoniana são tratados de forma continuada diferentemente das obras tradicionais em que os assuntos são abordados de forma seccionada. Isso permite ao estudante/leitor perceber ao longo do livro as conexões entre os diferentes assuntos desenvolvidos.
O livro contém exercícios resolvidos e exercícios para cada assunto desenvolvido. Além disso, há um conjunto de problemas no final de cada capítulo com diferentes níveis de aprofundamento. Para os exercícios propostos, assim como para os problemas do final de cada capítulo, são apresentadas as respostas.
Por fim, utiliza-se o formalismo matemático adequado e de forma objetiva ao tratar o conteúdo da obra. Com o objetivo de auxiliar o estudante/leitor, um conjunto de apêndices com a descrição de conceitos fundamentais de matemática elementar, vetores e de cálculo diferencial e integral é apresentado no final do livro.
Ivan de Oliveira