Instant ebooks textbook Mathematical analysis: volume ii 1, january 1 2024 edition teo lee peng down
Mathematical
Analysis: Volume II 1, January 1 2024 Edition Teo Lee Peng
Visit to download the full and correct content document: https://ebookmass.com/product/mathematical-analysis-volume-ii-1-january-1-2024-ed ition-teo-lee-peng/
More products digital (pdf, epub, mobi) instant download maybe you interests ...
Inthesequel, n isafixedpositiveintegerreservedtobeusedfor Rn
1.1TheEuclideanSpace RnRnRn asaVectorSpace
If S1, S2, , Sn aresets,thecartesianproductofthese n setsisdefinedastheset
=
1 ×···×
n i=1
thatcontainsall n-tuples (a1,...,an),where ai ∈ Si forall 1 ≤ i ≤ n
Theset Rn isthecartesianproductof n copiesof R.Namely,
Thepoint (x1,x2,...,xn) isdenotedas x,whereas x1,x2,...,xn arecalledthe componentsofthepoint x.Wecandefineanadditionandascalarmultiplication on Rn.If x =(x1,x2,...,xn) and y =(y1,y2,...,yn) arein Rn,theadditionof x and y isdefinedas
Inotherwords,itisacomponentwiseaddition.Givenarealnumber α,thescalar multiplicationof α with x isgivenbythecomponentwisemultiplication αx =(αx1,αx2,...,αxn)
Theset Rn withtheadditionandscalarmultiplicationoperationsisavector space.Itsatisfiesthe10axiomsforarealvectorspace V .
Chapter1.EuclideanSpaces2
The10AxiomsforaRealVectorSpace V V V
Let V beasetthatisequippedwithtwooperations–theadditionandthe scalarmultiplication.Foranytwovectors u and v in V ,theiradditionis denotedby u + v.Foravector u in V andascalar α ∈ R,thescalar multiplicationof v by α isdenotedby αv.Wesaythat V withtheaddition andscalarmultiplicationisarealvectorspaceprovidedthatthefollowing 10axiomsaresatisfiedforany u, v and w in V ,andany α and β in R.
Axiom1 If u and v arein V ,then u + v isin V .
Axiom2 u + v = v + u.
Axiom3 (u + v)+ w = u +(v + w).
Axiom4 Thereisazerovector 0 in V suchthat
0 + v = v = v + 0 forall v ∈ V.
Axiom5 Forany v in V ,thereisavector w in V suchthat v + w = 0 = w + v
Thevector w satisfyingthisequationiscalledthe negative of v,andis denotedby v.
Axiom6 Forany v in V ,andany α ∈ R, αv isin V .
Axiom7 α(u + v)= αu + αv
Axiom8 (α + β)v = αv + βv
Axiom9 α(βv)=(αβ)v
Axiom10 1v = v
Rn isarealvectorspace.Thezerovectoristhepoint 0 =(0, 0,..., 0) with allcomponentsequalto0.Sometimeswealsocallapoint x =(x1,...,xn) in
Chapter1.EuclideanSpaces3
Rn avector,andidentifyitasthevectorfromtheorigin 0 tothepoint x
Definition1.1StandardUnitVectors
In Rn,thereare n standardunitvectors e1, , en givenby e1 =(1, 0,..., 0), e2 =(0, 1,..., 0), , en =(0,..., 0, 1)
Let V beavectorspace.Twovectors u and v in V areparallelifeither u = 0 orthereexistsaconstant α suchthat v = αu.
Inotherwords,twovectors u and v in V arelinearlyindependentifandonly iftheyarenotparallel.
Chapter1.EuclideanSpaces5
Example1.5
If S = {v1,..., vk} isalinearlyindependentsetofvectors,thenforany S′ ⊂ S, S′ isalsoalinearlyindependentsetofvectors. Nowwediscusstheconceptofdimensionandbasis.
Definition1.4DimensionandBasis
Let V beavectorspace,andlet W beasubspaceof V .If W canbe spannedby k linearlyindependentvectors v1,..., vk in V ,wesaythat W hasdimension k.Theset {v1,..., vk} iscalledabasisof W
Example1.6
In Rn,the n standardunitvectors e1, , en arelinearlyindependentand theyspan Rn.Hence,thedimensionof Rn is n
Example1.7
In R3,thesubspacespannedbythetwolinearlyindependentvectors e1 = (1, 0, 0) and e3 =(0, 0, 1) hasdimension2.
Next,weintroducethetranslateofaset.
Definition1.5TranslateofaSet
If A isasubsetof Rn , u isapointin Rn,thetranslateoftheset A bythe vector u istheset
Example1.8
In R3,thetranslateoftheset A = {(x,y, 0) | x,y ∈ R} bythevector u =(0, 0, 2) istheset
In Rn,thelinesandtheplanesareofparticularinterest.Theyareclosely
Aline L in Rn isatranslateofasubspaceof Rn thathasdimension1.As aset,itcontainsallthepoints x oftheform
x = x0 + tv,t ∈ R, where x0 isafixedpointin Rn,and v isanonzerovectorin Rn.The equation x = x0 + tv, t ∈ R,isknownastheparametricequationofthe line.
Alineisdeterminedbytwopoints.
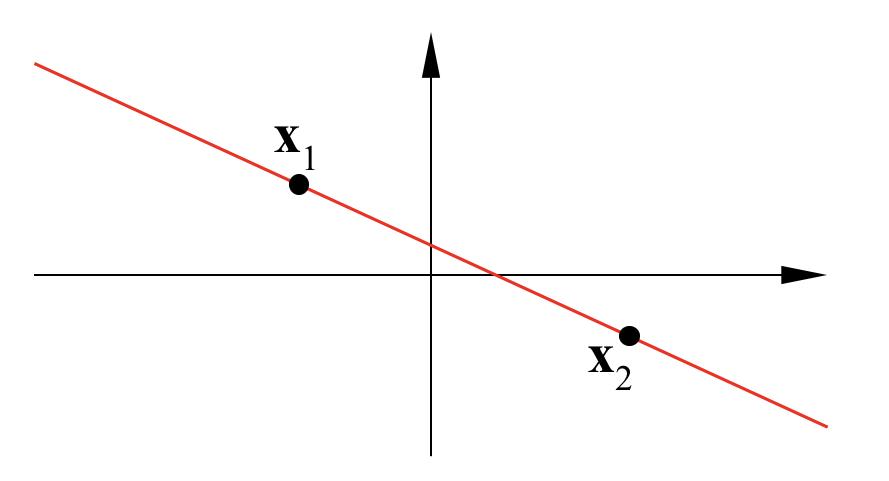
Example1.9
Giventwodistinctpoints x1 and x2 in Rn,theline L thatpassesthrough thesetwopointshaveparametricequationgivenby
x = x1 + t(x2 x1),t ∈ R
When 0 ≤ t ≤ 1, x = x1 + t(x2 x1) describesallthepointsontheline segmentwith x1 and x2 asendpoints.
Figure1.1:ALinebetweentwopoints.
Chapter1.EuclideanSpaces7
Definition1.7Planesin RnRnRn
Aplane W in Rn isatranslateofasubspaceofdimension2.Asaset,it containsallthepoints x oftheform
where x0 isafixedpointin Rn,and v1 and v2 aretwolinearlyindependent vectorsin Rn
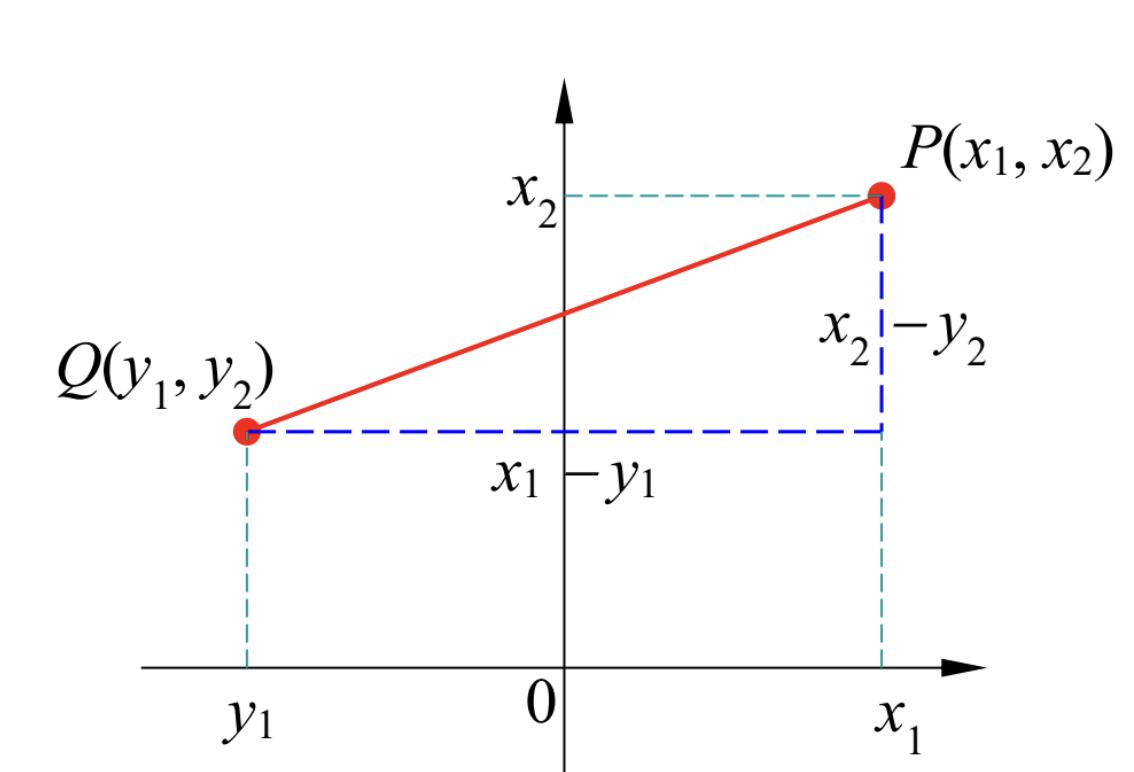
Besidesbeingarealvectorspace, Rn hasanadditionalstructure.Itsdefinition ismotivatedasfollows.Let P (x1,x2,x3) and Q(y1,y2,y3) betwopointsin R3
ByPythagorastheorem,thedistancebetween P and Q isgivenby
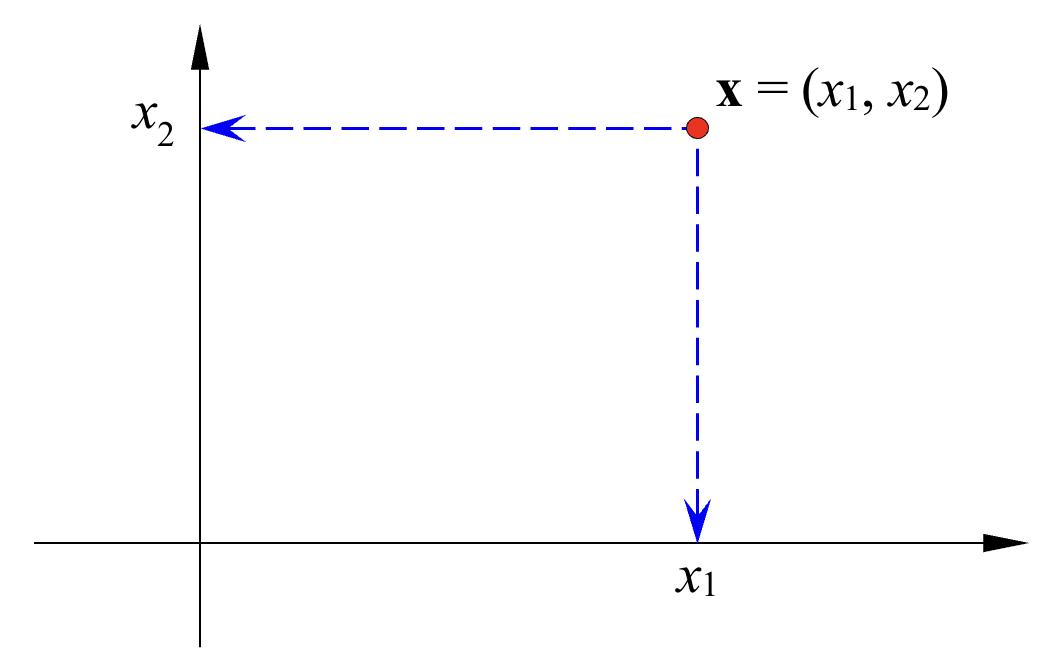
Figure1.2:Distancebetweentwopointsin R2
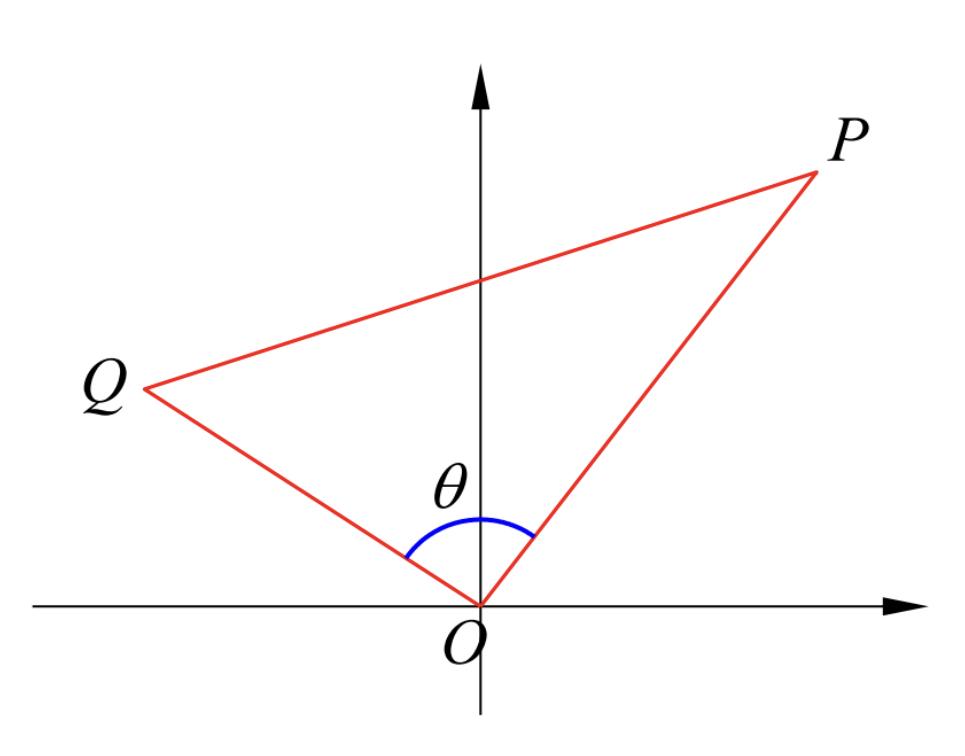
Considerthetriangle OPQ withvertices O, P , Q,where O istheorigin.Then
Let θ betheminoranglebetween OP and OQ.Bycosinerule,
Astraightforwardcomputationgives
Chapter1.EuclideanSpaces8
Figure1.3:Cosinerule.
Hence,
(1.1)
Itisaquotientof x1y1 + x2y2 + x3y3 bytheproductofthelengthsof OP and OQ
Generalizingtheexpression x1y1 + x2y2 + x3y3 from R3 to Rn definesthedot product.Foranytwovectors x =(x1,x2,...,xn) and y =(y1,y2,...,yn) in Rn , thedotproductof x and y isdefinedas x · y = n i=1 xiyi = x1y1 + x2y2 + ··· + xnyn.
Thisisaspecialcaseofaninnerproduct.
Definition1.8InnerProductSpace
Arealvectorspace V isaninnerproductspaceifforanytwovectors u and v in V ,aninnerproduct ⟨u, v⟩ of u and v isdefined,andthefollowing conditionsforany u, v, w in V and α,β ∈ R aresatisfied.
Giventhat V isaninnerproductspace,thedistancebetween u and v in V isdefinedas
Forexample,thedistancebetweenthepoints x =(x1,...,xn) and y = (y1,...,yn) intheEuclideanspace Rn is
Chapter1.EuclideanSpaces11
Foranalysisin R,animportantinequalityisthetriangleinequalitywhichsays that |x + y|≤|x| + |y| forany x and y in R.Togeneralizethisinequalityto Rn , weneedthecelebratedCauchy-Schwarzinequality.Itholdsonanyinnerproduct space.
Proposition1.5Cauchy-SchwarzInequality
Giventhat V isaninnerproductspace,forany u and v in V ,
Theequalityholdsifandonlyif u and v areparallel.
Proof
Itisobviousthatifeither u = 0 or v = 0,
andsotheequalityholds.
Nowassumethatboth u and v arenonzerovectors.Considerthequadratic function f : R → R definedby
Noticethat f (t)= at2 + bt + c,where
The3rd axiomofaninnerproductsaysthat f (t) ≥ 0 forall t ∈ R.Hence, wemusthave b2 4ac ≤ 0.Thisgives
Thus,weobtaintheCauchy-Schwarzinequality
u, v⟩|≤∥u
Chapter1.EuclideanSpaces12
Theequalityholdsifandonlyif b2 4ac =0.Thelattermeansthat f (t)=0 forsome t = α,whichcanhappenifandonlyif αu v = 0,
orequivalently, v = αu
Nowwecanprovethetriangleinequality.
Proposition1.6TriangleInequality
Let V beaninnerproductspace.Foranyvectors v
,...,
Proof
Itissufficienttoprovethestatementwhen k =2.Thegeneralcasefollows frominduction.Given v1 and v2 in V ,
Let X beaset,andlet d : X × X → R beafunctiondefinedon X × X Wesaythat d isametricon X providedthatthefollowingconditionsare satisfied.
1. Forany x and y in X, d(x,y) ≥ 0,and d(x,y)=0 ifandonlyif x = y.
2. d(x,y)= d(y,x) forany x and y in X
3. Forany x, y and z in X, d(x,y) ≤ d(x,z)+ d(y,z). If d isametricon X,wesaythat (X,d) isametricspace.
Metricspacesplayimportantrolesinadvancedanalysis.If V isaninnner productspace,itisametricspacewithmetric
UsingtheCauchy-Schwarzinequality,onecangeneralizetheconceptofangles toanytwovectorsinarealinnerproductspace.If u and v aretwononzerovectors inarealinnerproductspace V ,Cauchy-Schwarzinequalityimpliesthat
Chapter1.EuclideanSpaces14
isarealnumberbetween 1 and1.Generalizingtheformula(1.1),wedefinethe angle θ between u and v as
Thisisananglebetween 0◦ and 180◦.Anecessaryandsufficientconditionfor twovectors u and v tomakea 90◦
Definition1.13Orthogonality
Let V beaninnerproductspace.If u and v areorthogonalvectorsin V , then
Nowwediscusstheprojectiontheorem.
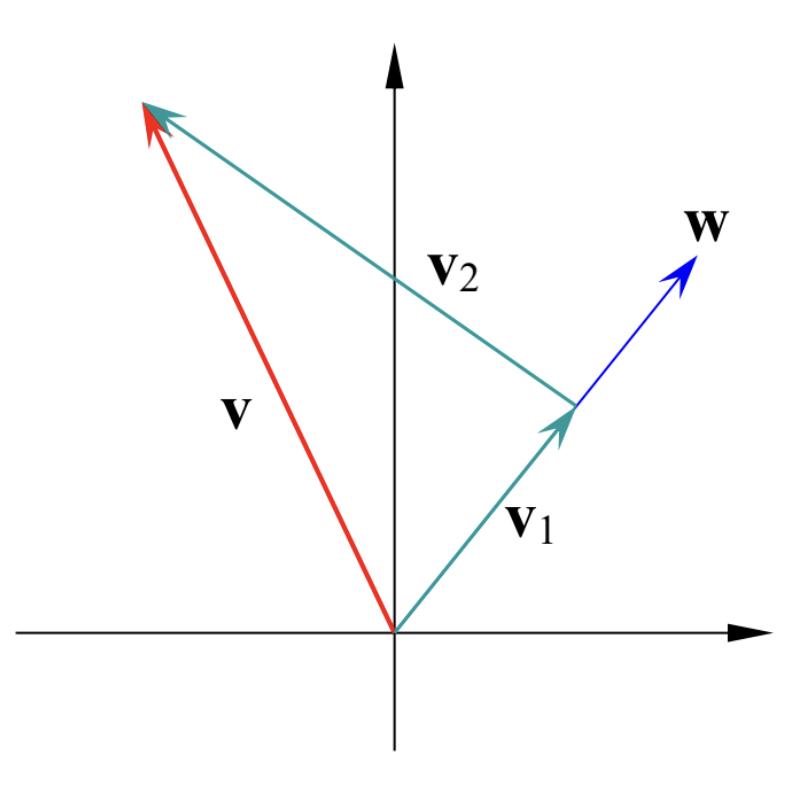
Theorem1.10ProjectionTheorem
Let V beaninnerproductspace,andlet w beanonzerovectorin V .If v isavectorin V ,thereisauniquewaytowrite v asasumoftwovectors v1 and v2,suchthat v1 isparallelto w and v2 isorthogonalto w.Moreover, foranyrealnumber α,
Assumethat v canbewrittenasasumoftwovectors v1 and v2,suchthat v1 isparallelto w and v2 isorthogonalto w.Since w isnonzero,there isarealnumber β suchthat v1 = βw.Since v2 = v v1 = v βw is orthogonalto w,wehave 0= ⟨v βw, w⟩ = ⟨v, w⟩−
⟨w, w⟩
Thisimpliesthatwemusthave
= ⟨v, w⟩ ⟨w, w⟩ , and v1 = ⟨v, w⟩ ⟨w, w⟩ w, v2 = v ⟨v, w⟩ ⟨w, w⟩ w.
Itiseasytocheckthat v1 and v2 givenbytheseformulasindeedsatisfy therequirementsthat v1 isparallelto w and v2 isorthogonalto w.This establishestheexistenceanduniquenessof v1 and v2. Nowforanyrealnumber α, v αw = v v1 +(β α)w
Chapter1.EuclideanSpaces16
Since v v1 = v2 isorthogonalto (β α)w,thegeneralizedPythagoras
theoremimpliesthat
Thisprovesthat
Theequalityholdsifandonlyif
Since ∥w∦=0,wemusthave α = β
Thevector v1 inthistheoremiscalledtheprojectionof v ontothesubspace spannedby w.
Thereisamoregeneralprojectiontheoremwherethesubspace W spannedby w isreplacedbyageneralsubspace.Wesaythatavector v isorthogonaltothe subspace W ifitisorthogonaltoeachvector w in W
Theorem1.11GeneralProjectionTheorem
Let V beaninnerproductspace,andlet W beafinitedimensionalsubspace of V .If v isavectorin V ,thereisauniquewaytowrite v asasumof twovectors v1 and v2,suchthat v1 isin W and v2 isorthogonalto W .The vector v1 isdenotedbyprojW v.Forany w ∈ W ,
andtheequalityholdsifandonlyif w = projW v.
SketchofProof
If W isa k-dimensionalvectorspace,ithasabasisconsistsof k linearly independentvectors w1,..., wk.Sincethevector v1 isin W ,thereare constants c1,...,ck suchthat v1 = c1w1 + ··· + ckwk
Chapter1.EuclideanSpaces17
Thecondition v2 = v v1 isorthogonalto W givesriseto k equations
Usingthefactthat w1,..., wk arelinearlyindependent,onecanshowthat the k × k matrix
isinvertible.Thisshowsthatthereisaunique
satisfying thelinearsystem(1.2).
If V isaninnerproductspace,abasisthatconsistsofmutuallyorthogonal vectorsareofspecialinterest.
Definition1.14OrthogonalSetandOrthonormalSet
Let V beaninnerproductspace.Asubsetofvectors S = {u
,..., uk}
iscalledanorthogonalsetifanytwodistinctvectors ui and uj in S are orthogonal.Namely,
S iscalledanorthonormalsetifitisanorthogonalsetofunitvectors. Namely,
If S = {u1,..., uk} isanorthogonalsetofnonzerovectors,itisalinearly independentsetofvectors.Onecanconstructanorthonormalsetbynormalizing eachvectorintheset.Thereisastandardalgorithm,knownastheGram-Schmidt process,whichcanturnanylinearlyindependentsetofvectors {v1,..., vk} into
Let V beaninnerproductspace,andlet S = {u1,..., uk} beanorthogonal setofnonzerovectorsin V thatspansthesubspace W .Givenanyvector v in V ,
Proof
Bythegeneralprojectiontheorem, v = v1 + v2,where v1 = projW v isin W and v2 isorthogonalto W .Since S isabasisfor W ,thereexistscalars c1,c2,...,ck suchthat v1 = c1u1 + + ckuk.Therefore,
Since S isanorthogonalsetofvectorsand v2 isorthogonaltoeach ui,we findthatfor 1 ≤ i ≤ k,
Thisprovesthelemma.
Theorem1.13Gram-SchmidtProcess
Let V beaninnerproductspace,andassumethat S = {v1,..., vk} is alinearlyindependentsetofvectorsin V .Definethevectors u1,..., uk inductivelyby u1 = v1,andfor 2 ≤ j ≤ k,
Then S′ = {u1,..., uk} isanonzerosetoforthogonalvectors.Moreover, foreach 1 ≤ j ≤ k,theset {ui | 1 ≤ i ≤ j} spansthesamesubspaceas theset {vi | 1 ≤ i ≤ j}.
Chapter1.EuclideanSpaces19
SketchofProof
For 1 ≤ j ≤ k,let Wj bethesubspacespannedbytheset {vi | 1 ≤ i ≤ j}.
In Rn,ahyperplaneisatranslateofasubspaceofdimension n 1.Inother words, H isahyperplaneifthereisapoint x0 in Rn,and n 1 linearly independentvectors v1, v2, ..., vn 1 suchthat H containsallpoints x of theform x = x0 + t1v1 + + tn 1vn 1, (t 1,...,tn 1) ∈ Rn 1
Let v1, v2, , vn 1 belinearlyindependentvectorsin Rn,andlet H be thehyperplane
Anonzerovector n thatisorthogonaltoallthevectors v1,..., vn 1 is calledanormalvectortothehyperplane.If x1 and x2 aretwopointson H, then n isorthogonaltothevector v = x2 x1.Anytwonormalvectorsof ahyperplanearescalarmultiplesofeachother.
Proposition1.16
If H isahyperplanewithnormalvector n =(a1,a2,...,an),and x0 = (u1,u2,...,un) isapointon H,thentheequationof H isgivenby
Conversely,anyequationoftheform
istheequationofahyperplanewithnormalvector n =(a1,a2,...,an).
Example1.10
Given 1 ≤ i ≤ n,theequation xi = c isahyperplanewithnormalvector ei. Itisahyperplaneparalleltothecoordinateplane xi =0,andperpendicular tothe xi-axis.
Chapter1.EuclideanSpaces22
Exercises1.1
Question1
Let
Question2
Let
Question3
Question4
Question5
Chapter1.EuclideanSpaces23
1.2ConvergenceofSequencesin RnRnRn
ApointintheEuclideanspace Rn isdenotedby x =(x1,x2,...,xn).When n =1,wejustdenoteitby x.When n =2 and n =3,itiscustomarytodenotea pointin R2 and R3 by (x,y) and (x,y,z) respectively.
TheEuclideaninnerproductbetweenthevectors x =(x1,x2,...,xn) and y =(y1,y2,...,yn) is
,
Thenormof x is
whilethedistancebetween x and y is
Asequencein Rn isafunction f : Z+ → Rn.For k ∈ Z+,let ak = f (k). Thenwecanalsodenotethesequenceby {ak}∞ k=1,orsimplyas {ak}
InvolumeI,wehaveseenthatasequenceofrealnumbers {ak}∞ k=1 issaidto convergetoarealnumber a providedthatforany ε> 0,thereisapositiveinteger K suchthat |ak a| <ε forall k ≥ K.
Noticethat |ak a| isthedistancebetween ak and a.Todefinetheconvergence ofasequencein Rn,weusetheEuclideandistance.
Example1.11
Chapter1.EuclideanSpaces24
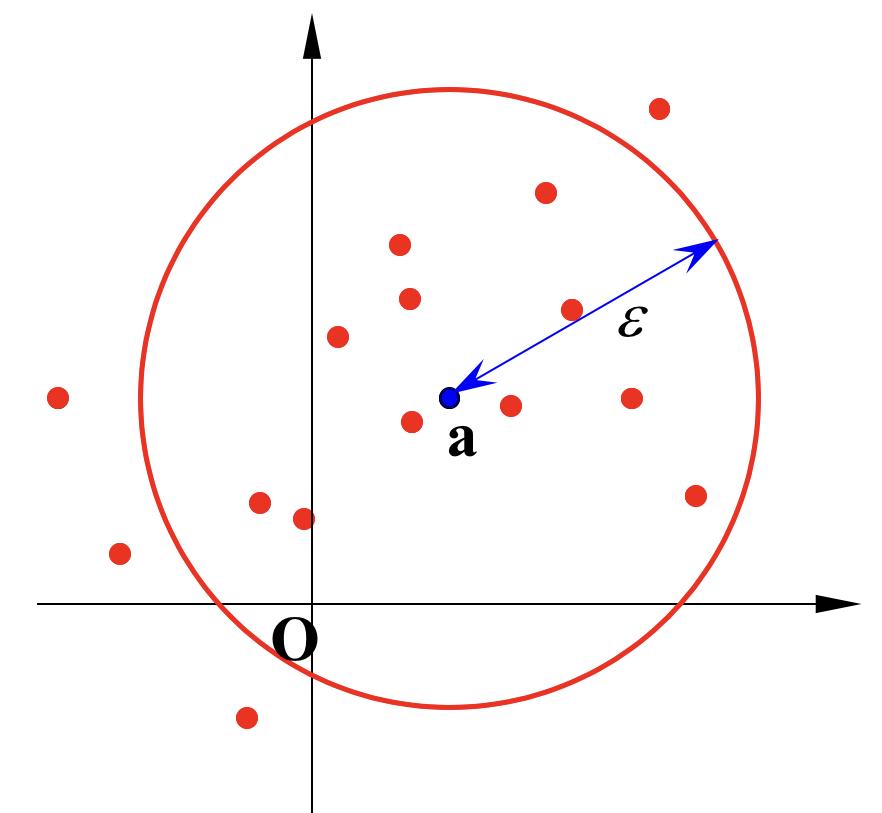
Definition1.19ConvergenceofSequences
Asequence {ak} in Rn issaidtoconvergetothepoint a in Rn provided thatforany ε> 0,thereisapositiveinteger K sothatforall k ≥ K,
<ε.
If {ak} isasequencethatconvergestoapoint a,wesaythatthesequence {ak} isconvergent.Asequencethatdoesnotconvergetoanypointin Rn issaidtobedivergent.