
315#1203 件/組 實作課程 實作課程堂 堂 發明是可以學習的發明是可以學習的 2020INVENTING CAN BE LEARNEDINVENTING CAN BE LEARNED 10+ 10+








1 是可以學習的發明 Gigo 智高 Learning Lab 決問題的能力,更能將這些知識活用,進而學習創新的技巧與能力。我們希望小朋友透過動手玩積木的過程中,快樂地學習科學知識,培養正確的學習態度及解5.用積木做實驗,零件可重覆使用,省時省力。4.課程由淺入深,涵蓋各國生活科學課綱,並與日常生活應用結合。3.天生我才必有用,兼顧個人學習與團隊分組合作。2.跳脫傳統教學架構,遊戲競賽中學習創新。1.課程以積木為主軸,每堂課都有積木組裝創作。學習實驗室全系列包含個人包裝及學校包裝,特點如下:


2 第5課 專題製作(1) 第6課 直升機 第9課 鑽台 第10 課 專題製作(2) 第19課 人形機器人 第20課 專題製作(4) 第18課 機械手臂 第17課 蠍子機器人 第16課 夾物機器人 第15課 專題製作(3) 第14課 避光毛毛蟲 第13課 追光儀 第12 課 繪圖機器人 第11 課 觸碰式機器人 第7課 電風扇 第8課 攪拌器 第2 課 推土機 第3 課 火星探測車 第4課 避障車 第1 課 前言目錄安全資訊汽車 1 41 49 59 15 69 23 79 29 95 105 2 3 47 53 11 63 19 71 27 87 33 37 目 錄 進入編程積木的世界零件清單 5 9
3 安全資訊 警告!不要瞄準眼睛或臉發射重物或尖銳物體。警告!不適合3歲以下的兒童。因較微小的零件可會被誤吞而有窒息危險。請妥善保存包裝和說明,因為它們包含重要資訊與告知事項。需在父母或其他成人陪同下使用。建議10歲(含)以上的兒童使用。 親愛的家長及大人們 富地樂趣!型的正確組裝,並協同孩子來組裝模型。在開始實驗前,請共同和您的孩子一起來詳讀和討論模型安全組裝須知。檢查並確保該模我們希望您和您的孩子將會在實驗過程中獲得豐 美國聯邦通信委員會第15 部分聲明: 本設備嚴恪遵守美國聯邦通信委員會規範。第15部分是符合以下兩個條件:(1) ----干擾:實會對無線電或電視接收造成影響的話,則鼓勵用戶嘗試採用一種或多種以下措施來消除但是,也不能保證干擾不會在特定的安裝情況下發生。如果該裝置通過關閉動作操作時確通信產生有害的干擾。護規範。該設備的使用所產生無線電的能量,如果依指示說明書來安裝,可能會對無線電第15部分之聲明。這些限制主要是防止在住宅安裝下產生的有害干擾並且提供合理的保注意:本設備已經通過測試,並且符合B類數位設備規範,根據美國聯邦通信委員會規則未經許可而擅自更改或修改違反規範者,可能會導致用戶喪失操作設備的權力。正常操作。會產生有害的干擾,包括干擾;(2)本設備必須接受任何干擾的影響,包括很多干擾導致不該設備不重新調整或重新定位接收的天線。加大設備和接收器之間的間距距離。將設備連接到與接收器不同電路的電源插座上。向經銷商或有經驗的收音機/電視技術人員詢問。 電池實驗的安全性 >>>為了操作模型,您需要六個AA電池(1.5伏,AA/ LR6型)或六個AA可充電電池(1.2伏, AA型,HR6 / KR6),因電池有其保存期限,故本套組包裝內不包含電池。 >>> 嚴禁將電線插入到插座裡頭!嚴禁使用家用電力!高壓電力是極危險和致命的!

4 >>> 電擊接觸片應防止短路。短路可能導致電線過熱和電池爆炸。 >>> 不同類型的電池或新舊電池不要交互混用。 >>> 不要混用新舊電池。 >>> 不要將鹼性,標準(碳鋅)或可充電(鎳鎘)電池混合使用。 >>> 電池請正確地按照正負極位置置入使用。小心裝入於電池盒內並依照第6 頁上的說明指 示當裝好電池後用蓋子蓋上 >>> 非充電電池嚴禁用來充電。會造成爆炸的危險! >>> 充電電池需有成人的監護下進行充電。 >>> 充電電池在充電之前須從玩具中卸下。 >>> 耗損的電池需從玩具中卸下並丟棄。 >>> 按照環保規定處置用過的電池,廢舊電池勿當一般垃圾丟棄。 >>> 務必不要讓電池、硬幣、鑰匙或其它金屬物體作接觸。 >>> 避免變形的電池。 >>> 否有損壞。如有損壞,在修復損壞之前不得使用。與此產品配套使用的變壓器或電源供應器應定期檢查電源線、插頭、外殼或其他部件是 >>> 此產品只能搭配玩具專用的變壓器或是電源供應器。 >>> 請聯繫當地政府的相關處理場所。們丟入家庭一般垃圾。必須將其交付給電子垃圾回收站,如下圖所示:本產品的電子設備屬於可回收利用的垃圾。為了環保,在電子設備壽命結束時,請不要把它電子及電器設備廢棄物處理說明:每個模型操作都有安全資訊和使用須知。在每一次實驗操作後,電池需取出。有馬達模型的使用需在成人的監護下操作。在所有使用電池的實驗當中,須有大人監護過程及示範操作使用來確保正確的組裝。變壓器並不屬於玩具,請妥善使用。 注意! 依據 低功率射頻電機須忍受合法通信或工業、科學及醫療用電波輻射性電機設備之干擾。前項合法通信,指依電信法規定作業之無線電通信。第十四條第十二條低功率電波輻射性電機管理辦法經型式認證合格之低功率射頻電機,非經許可,公司、商號或使用者均不得擅自變更頻率、加大功率或變更原設計之特性及功能。低功率射頻電機之使用不得影響飛航安全及干擾合法通信;經發現有干擾現象時,應立即停用,並改善至無干擾時方得繼續使用。 #1246R說明書 https://build.t2t.io/ur?qr=HJiOkav78 #1246R說明書
5 進入編程積木的世界 在正式進入學習課程之前,請依序完成下列準備工作 [準備工作一] 認識主要零件 A. 智高智能主控盒 旋鈕。的麥克風,一個發出聲音的蜂鳴器,以及一個智高智能主控盒還包含一個可用於檢測聲音它自動運行或針對感應器觸發相對應的動作。透過無線藍牙連接。以平板或電腦編寫程式讓打開透明蓋,按照指示的正負極性裝入電池,置,會更方便地將感應器插入正確的位置。可以將標籤貼在智高智能主控盒上的正確位 B. 32倍行星齒輪馬達盒、40倍馬達盒 指令操作。由智高智能主控盒控制,連接到傳動軸後依照 C. 超音波感測器 目標物的距離。發出超音波和接收反彈的超音波,可以估算到 D. 光度感應器 將光信號轉換成電信號傳回智高智能主控盒。能夠檢測發光量變化的感測器。 E. 按壓感應器 並將感測值傳回智高智能主控盒。像人的手指能夠感覺它是否已經觸碰到物體。 F. CB1 GigoBlockly: 模型。以及編程指令,透過智高智能主控盒來操控像是機器人的「大腦」。依來自感應器的反饋平板電腦應用程式(桌上型電腦應用程式), A B B C D E F LED 燈 USB接口 超聲波感測器接口蜂鳴器 智高伺服馬達接口 4 電源連線指示燈 光度感應器接口 智高伺服馬達接口 3 按壓感應器接口1 智高伺服馬達接口 2 按壓感應器接口2旋鈕式可變電阻 外接直流電源孔 智高伺服馬達接口 1 電源開關麥克風 主控盒電池拆裝方式:闔上並輕壓確認已扣好。輕壓並滑開透明上蓋,這需要一些力道,可能需要家長協助。依照標示的正負極安裝電池,再將上蓋本模型只能連接到帶有以下任一符號的設備或







6 [準備工作二] 應用程式說明 CB1 GigoBLOCKLY應用程式下載 您可以在iOS App Store或Android的play商店下載免費應用程式。 • iOS系統必須是iOS 8或更高版本,並且支援藍牙4.0。建議使用iOS 9或10以上。 支援的設備包括iPad第三代或更高階版本,iPad mini、iPad Air和iPad Pro。iPad 顯示器建議9.7英寸或是更大。 • Android設備必須支持藍牙4.0,並且必須運行Android 4.4或更高版本。 建議使用9.7英寸或更大 證本軟體相容於所有設備。在Android在Android注意:CB1Android設備。Android設備,我們無法推薦特定的的顯示屏。由於市場上有大量的GigoBlockly應用程式是6.0上開發的,預計可以5.x或4.4上運行,不保 搜尋下載和安裝應用程式 3.2.1.在平板電腦上的網路瀏覽器中,輸入https://blockly.t2t.io/gigo,連到Gigo網站裡RoboticsWorkshop產品頁面。在此網頁中,可取得iOSAppStore和GooglePlay應用程式的載點,點擊後連接到您系統設備的應用程式下載頁面進行下載。或者,您可以在iOSAppStore和GooglePlay搜尋「CB1GigoBlockly」。請您按照網頁上的步驟下載和安裝該應用程式。 將應用程式連接到智高智能主控盒 開啟智高智能主控盒及CB1 如果您無法連接到智高智能主控盒,請先關閉應用程式後再重新開啟。GigoBlockly應用程式後,平板電腦會自動與最接近的藍牙接收器連線。 桌上型電腦CB1 GigoBlockly指南 • 請注意CB1 GigoBlockly並不支援所有桌上型電腦,當您安裝CB1 GigoBlockly與桌上型(或是筆記型) 電腦進行連線時,需要有一條USB2.0 / 3.0端口的連結線,才能進行智高智能主控盒的積木程式設定。 目前CB1 高階版本的電腦軟體,但不能保證任何電腦都可以使用CB1GigoBlockly是專門針對Windows10所開發出來的程式,因此建議使用Window7或是更GigoBlockly。 • 系統最低要求:雙核處理器,2.4 GHz(i5或i7 Intel處理器或AMD等效能);4 GB RAM記憶體;100 MB可用硬碟空間;802.11g / n無線(適用於支援WPA2筆記型電腦);19英寸液晶顯示器。 在桌上型電腦上搜尋下載和安裝應用程式: 1.在網路瀏覽器中,輸入https://blockly.t2t.io/gigo,連到Gigo網站裡Robotics Workshop產品頁面。 2. 點擊下載CB1 GigoBlockly Windows桌面應用程式,下載並執行安裝程式;使用隨附的USB線連接 智高智能主控盒到電腦。 >>>退出您現階段的程式重新啟動;或嘗試開啟其他程式。>>>確保感測器接頭正確地插入智高智能主控盒。>>>斷開連線,重新建立藍牙連線。如果無法連線:連線故障排除
7 進入編程積木的世界 CB1 GigoBlockly應用程式界面 [準備工作三] 程式編輯 CB1 GigoBlockly 介紹 CB1 GigoBlockly是基於Google Blockly 可以讓它們做您想要的工作。目的是運用編寫程式來命令及控制這個實驗包的機器人作動,以便您該軟體可以輕鬆插入,移動,配置和刪除積木程式進行編輯。它是搭配本實驗包智高智能主控盒一起使用。設計出來的視覺編程工具。 面板控制區各部分功能介紹: A. CB1 活動主控盒連接到應用程式時,它會改變顏色,當智高智能主控盒和應用程式之間有GigoBlockly狀態指示區:當智高智能時,它會呈現藍色閃爍狀態,離線為黑色。
停止:停止整個程式運行。執行:此按鈕為重頭到尾不間斷執行編入智高智能主控盒內的積木程式。步進:可以一步一步執行積木程式,並觀察每一步的結果。編譯:可將積木程式上傳到智高智能主控盒。程式操作按鈕:
D. 馬達狀態顯示:這些儀表顯示每個馬達的方向及轉速狀態。 E. 儲存:可以幫您儲存已撰寫好的積木程式,下面的檔案選單可以讓您選擇不同的位置進行儲存。 F. 載入示範程式:內建十個示範程式,要載入其中一個示範程式時,請點選選單中列出的選項,積木程式即在編碼區呈現。 AB DC EF 積木程式工具箱及積木程式編碼區 您的機器人。這裡是主要的編程區域,您可以在此區域中編輯積木程式來控制A.工具箱:點選其中一個類別工具箱,即會顯示該類別中可使用的積木程式塊。B.CB1GigoBlockly:這區包含專門為智高智能主控盒而開發的所有積木程式。C.積木程式編碼區:這是將積木程式編寫配置運行程式的地方。 A B C
B. C. 感測器狀態顯示區:這些儀表區顯示安裝在智高智能主控盒上的各種感測器的狀態:距離:輸入超音波感測器感測資料。亮度:輸入光度感應器感測資料。聲音:輸入聲音感測器(麥克風)感測資料。旋鈕:輸入旋鈕(可變電阻)資料。按鈕1和2:輸入按壓感應器感測資料。






CB1 GigoBlockly
8 編寫程式 問,建議您可在成人的協助下上網搜尋。而GigoBlockly屬於開放原始碼環境,因此在網路上有相當大量的相關資訊,入程式以及體驗模型與程式的互動,來學習積木程式的功能。由於本手冊將不逐一說明每個積木程式的功能,而是透過組裝模型、載刪除積木以進行編輯(如圖示D)。數值。也可以長按住積木程式即會出現複製、加入註解、收合、停用及您可以(如圖示C)透過點擊選單來更改積木程式中的可變動參數或重要:當運行程式時,編輯軟體將執行您的積木程式從上到下開始。連接和放置以形成新的積木程式。積木程式也可以堆疊在彼此之上。一個積木程式塊拖曳到編碼區(如圖示B);積木程式可以彼此互相點選(圖示A)CB1工具箱即會顯示該選單中的所有功能,選擇其中方法如下:您可以修改現有的積木程式或重新編寫您自己的積木程式。Blockly正是以此發展,若您對於特殊的積木程式有任何疑
B A C D A DBCE
以創建新的積木程式塊。小藍色齒輪,將「否則-如果」或「否則」積木程式塊拖曳到右側的窗口要創建一個「如果-否則」積木程式塊,點擊「如果」積木程式塊上的而言很重要。「如果-否則」和「如果-否則-如果-否則」積木程式塊對許多程式編寫「如果-否則」語法壓感應器(按鈕1和2)和可變電阻器(旋鈕)獲取感測器數據。音波感測器(距離)、光度感應器(亮度),聲音感測器(麥克風),按該感測器積木程式可讓您讀取設定使用的感測器數據。您可以選擇超E.讀取感測器資料積木程式LED積木程式可編寫智高智能主控盒上的LED閃爍設定。D.LED積木程式蜂鳴器積木程式塊可控制從智高智能主控盒上的蜂鳴器播放聲音。C.蜂鳴器積木程式可控制超音波感測器測量與物體間的距離。B.距離積木程式控制哪個馬達端,並設置您想要馬達轉動的方向和轉速。利用積木程式您可以編寫控制一到四個馬達,可以選擇使用積木程式A.馬達積木程式







9 零件清單 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 36 37 38 39 3540 41424344 45464748 50 49 51 52 53 54 55 56 x50 x30 x21 x12 x12x8 x2 x2x2 x5 x5 x12 x6 x6 x5 x4x3x1 x2 x5 x7 x11 x3 x2 x2 x1 x11 x2 x4 x6 x4 x3x2x9 x4 x6x3 x2x3 x2 x2x1 x2 x1x1 x1 x1 x1 x1 x2 x2 x2x1 x3 x1x1x1 60 5961 5758 x1x1 x1 626364 65 x1x2 x2 x1































































10 清單:找零件 - 檢查 - 核對 1 B-短結合鍵 50 2 C-長結合鍵 30 3 C-20mm軸扣鍵 21 4 C-自轉軸鍵 12 5 C-凸輪連結鍵 8 6 C-二合一結合鍵 12 7 C-雙向轉接鍵 2 8 C-單向轉接鍵 2 9 C-3孔1/4弧長條 2 10 C-3孔長條 5 11 C-3孔長條側有孔 5 12 C-3孔超長條 12 13 C-3孔圓角長條 6 14 C-5孔長條 6 15 C-5孔長條側有孔 1 16 C-5孔超長條底無孔 3 17 C-5孔超長條 2 18 C-7孔圓角長條 5 19 C-7孔圓角扁長條 5 20 C-9孔長條 4 21 C-11孔長條 7 22 C-15孔超長條 3 23 C-5×5孔正方框 6 24 C-5×10孔長方框 2 25 C-3x13孔超長方框 2 26 C-5×13孔超長方框 3 27 C-5×15孔長方框 4 28 C-27mm馬達短軸 6 29 C-35mmⅡ軸 4 30 C-65mmⅠ軸 2 31 C-70mmⅡ軸 11 32 C-100mmⅡ軸 1 33 C-20T齒輪 11 序號 零件名稱 品號 數量 34 C-40T齒輪 9 35 C-60T齒輪 2 36 C-80T齒輪 3 37 C-渦桿 4 38 C-軸轉接器 3 39 C-OD60x25mm橡膠輪胎 2 40 C-OD60x25mm橡膠輪框 2 41 C-A型飾片(左) 1 42 C-A型飾片(右) 1 43 C-A型飾片(左) 1 44 C-A型飾片(右) 1 45 C-C型飾片 2 46 C-F型飾片 2 47 C-E型飾片 2 48 C-7孔曲形條(左) 1 49 C-7孔曲形條(右) 1 50 B-牛角顆粒 2 51 C-墊片 2 52 C-軸固定鍵 1 53 C-40mm保麗龍球 3 54 C-70mm橡皮筋 1 55 B-扳手 1 56 C-萬向滾輪 1 57 C-MicroUSB 2.0傳輸線 1 58 C-延長線 1 59 C-超音波感測器 1 60 C-40倍馬達盒(DDM) 2 61 C-32倍行星齒輪馬達盒(DDM) 2 62 C-光度感應器 1 63 C-按壓感應器 2 64 P-標示貼紙 1 65 C-智高智能主控盒 1 序號 零件名稱 品號 數量 組裝技巧:這裡有幾點組裝模型的小技巧,請在組裝模型之前仔細地閱讀一遍。 更多組裝小技巧,請參考 X《錯誤》未留空隙 落。上圖所示)。此外,傳動軸的凸緣必須墊後以免齒輪掉能將摩擦減到最低而動力的傳輸效率提昇到最高(如件與長方框之間保持適當的距離(約1渦桿、鍊輪、凸輪、曲桿等所有智高可做力學傳動的零用傳動軸把齒輪安裝在長條上時一定要讓齒輪、滑輪、O《正確》有留空隙mm),這樣才 扳手的B端面來撬出自轉軸鍵。結合鍵;想要拆除自轉軸鍵時,你也可以使用手。操作扳手時,使用扳手的A端來拔除紅色當你想要將你的模型分解開來時,可使用扳 動的力量帶入到下一個齒輪。 齒輪嚙合得很好,否則就無法讓一個齒輪傳一排,為了讓模型可以順暢的運作,你必須將在模型建置中你常可以看到幾個齒輪組裝成 A.留意組裝長條與齒輪的間距: C.齒輪組: 7026-W10-D2R7413-W10-L2D7061-W10-Q1D7416-W10-C1D7413-W10-O1D7026-W10-L1S17413-W10-J1D7061-W10-U1D7406-W10-A1D7413-W10-I1S17413-W10-Q1D7413-W10-Z1D7413-W10-P1D7407-W10-C1S7404-W10-C3D7404-W10-C2D7413-W10-X1D7413-W10-W1S17413-W10-R1S17413-W10-K2D7404-W10-C1D7413-W10-Y1S27026-W10-X1D7026-W10-Q2S17061-W10-V1D7061-W10-Y1D7061-W10-X1D7061-W10-G1S27413-W10-S1R7026-W10-H1O17413-W10-T1R7061-W10-C1O7344-W10-C2S 1246-W85-A1R20#1246A-21246-W85-C1246-W85-B7392-W85-B37400-W85-A17416-W85-B1246-W85-DE30#1247A1247-W85-C1S7061-W10-B1YR10-02K30#7366-23620-W10-A1DR12#36207128-W10-G1O7397-W10-C2D7397-W10-C1D7398-W10-C2TD7398-W10-C1TD7392-W10-M1O7392-W10-L2O7392-W10-L1O7392-W10-L2TD7392-W10-L1TD7407-W10-B1S7407-W10-A1D7026-W10-L2D7344-W10-A1S17328-W10-G2O7026-W10-W5S7346-W10-C1S






11 想想看 (是第一位汽車發明者嗎?他是卡爾.弗里德利希.賓士汽車是現代人不可替代的交通運輸工具,但你知道誰 Karl Friedrich Benz 車。在賓士之後,戈特利布.威廉.戴姆勒(製造了世界上第一輛能實際應用內燃機發動的三輪汽)。賓士是一位德國工程師,他 Gottlieb Wilhelm Daimler)製造出四輪汽車,後來美國人亨利. 福特(Henry Ford 在科幻電影中有不少自動車的場景,事實上汽車自動化在)大量生產平價汽車,從此之後汽車漸漸普及。 1920 驗。自動駕駛汽車顧名思義「不需要人為操作即可以自動駕駛」,汽車以雷達、年代就開始實 GPS 成導航道路,汽車便將依循分析出來的指示自動作業。、電腦視覺或人工智慧等技術感測環境,電腦系統將感測資料分析後轉換自動駕駛汽車的優點與缺點? 汽車 應用科學 自動駕駛1 生活應用 國際自動機工程師學會(SAE 駛技術於未來將越來越進步。術已經漸漸實現,除此之外,現今更推出自動駕駛電動汽車,無人駕決策。自動駕駛汽車至今雖然尚未全面使用,但有關於自動駕駛的技車輛能自行啟動駕駛裝置,完全不需人為控制,車輛本身就可以自行動駕駛程度越完備,例如等級五屬於「完全自動駕駛」車輛,要由人為全程操控。等級一至等級五,數字越大代表自五個等級。等級零為最早期一般機械式車輛,需根據不同程度的駕駛輔助,將自動駕駛分成與美國國家公路交通安全管理局(NHTSA)International)


12 零件清單 5 3 4 6 2 1x8×2 1 x2 26 x2 34 x1 31 x1 41 x2 40 x1 42 x2 10 x1 60 x2 39 x2 29 x1 14 x1 65 35mm 35mm 70mm



















完成圖 13 汽車1 7 9 8 模型操作影片 程式範例 馬達A 馬達A 馬達A






1 2 3 組裝完成 實驗完成 創作完成 自我評量 14 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,調整程式,讓汽車模型前進與後退的速度加快。做做看,讓汽車模型可以自行前進與後退。
料之外,更常用於路基基底的處理及平整場地。路基與開挖基坑,例如在道路建設施工中,除了清除障礙物、堆積材卸泥沙石塊等工作。推土機主要用於場地清理平整、推築設有大型推土裝置,進行挖土、推土,以及運送搬土木工程中重要的施工機械。推土機前方推土機操作簡單、行駛快速、機動性高,是
15 想想看 是什麼?可以在哪種場合看到推土機?它有哪些主要構造?它的功用 推土機 應用科學 液力機械傳動2 有著重大成長。作動等過程中更容易控制,這種特性對於頻繁起步、停車、加速、作動的工程車輛傳遞能量。液力機械傳動改善驅動系統的操作性能,例如使車輛在起步、加速、轉換為液體的動能,再將液體的動能轉換為機械能,以液體為介質,利用液體來液力機械傳動是什麼呢?液力機械傳動是由葉輪組成的連接傳動裝置,將機械能動力已經全部採用柴油機,並絕大多數採用液力機械傳動。推土機隨後被柴油發動機取代,現今推土機的原形,它以蒸汽為動力運行。然而蒸氣式履帶式推土機的發明是我們現在熟悉推土機過馬匹帶動推土板進行推土。機發明之前有著類似推土機的應用,它是通行走方式分為履帶式和輪胎式兩種。在蒸汽推土機是土木工程中重要機械之一,它依照 生活應用


16 5 3 4 12 零件清單 x6 1 x2 34 x3 31 x1 43 x2 40 x1 44 x3 10 x2 60 x2 39 x2 29 x1 14 x1 65 x2 2 x2 3 x2 7 x2 9 x2 12 x3 21 x2 23 x2 26 x2 33 x2 45 x2 38 x1 37 x2 47 6 ×235mm 70mm35mm70mm 70mm 上視圖 9 7 8






























10 17 推土機2 完成圖 模型操作影片 16 馬達B馬達B 馬達A馬達A 馬達A馬達B 程式範例 11 12 13 14 15











1 2 3 組裝完成 實驗完成 創作完成 自我評量 18 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 能不能將重物抬起。試試看,改造模型,將推土機的渦桿更換為齒輪組,測試向前推送。做做看,以自己的推土機,將物品(例如橡皮擦、鉛筆、硬幣)
19 想想看 會想到火星進行探險呢?人類生活在哪個星系?這些星系之中又有哪些星球?為什麼人類 火星探測車 應用科學 太空探測3 空中進行探測。器人進行探測,另一方面是將人送至太由兩方面實施,第一是由無人駕駛的機家用望遠鏡進行觀察;太空的物理勘探最近的行星。太空研究主要是由天文學星之中,火星是僅次於金星,距離地球由近至遠的排列序為第四顆。在八大行火星是太陽系八大行星之一,距離太陽 1964 年,美國發射的水手 4 層神秘面紗。現在就讓我們透過教材,一起來探索宇宙吧!測計畫都宣告失敗。但因為那些經歷,讓我們對於火星從一無所知,漸漸撥開那你可千萬別認為火星探測是件簡單的事情!在這五十多年來,一半以上的火星探的五十幾年,超過三十枚的探測器皆成功回報數據。號是歷史上第一枚成功到達火星的探測器。接下來 生活應用球私人空間探索也逐漸興盛。各國從競爭走向合作。在近年,私人集團的太空旅遊和月中的「太空競賽」成為太空探索的起源。冷戰結束後,蘇聯進行一連串的對抗競爭,其中科技競賽行物理探勘」。歷史上的冷戰期間,美國與太空探索是指,對於「地球以外的空間進 20 不因此滿足,人類對於太空的探索將永無止盡。過人類數千年所獲得知識總和的百萬倍,但人類對於太空的好奇並世紀,宇宙空間探測獲得的知識,超


20 零件清單 3 5 3 4 6 12 ×2 100mm x8 1 x3 34 x1 31 x2 40 x1 10 x1 60 x2 39 x2 29 x1 14 x1 65 x2 2 x2 9 x2 12 x2 23 x2 24 x1 33 x1 37 x1 47 x1 15 x2 22 x1 28 x1 32 x1 41 x1 42 x1 36 x1 61 ×2 35mm 70mm7 35mm 前視圖 8 28




























21 火星探測車3 完成圖 模型操作影片 9 10 11 馬達A 馬達A馬達B 馬達B馬達B馬達A 程式範例






1 2 3 組裝完成 實驗完成 創作完成 自我評量 22 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 運行一遍。試試看,調整程式,讓火星探測車的探測裝置,正反方向都如桌面及地面)。做做看,觀察火星探測車在不同地表跑動的情況有何不同(例
23 想想看 是因為什麼,能夠知道前方有障礙物而進行閃躲呢?因為裝載著感應器,避障車能夠感應到障礙物而進行避障。人類 避障車 應用科學 避障感應4 環境的信息是第一步。地。不管是要進行導航規劃還是避障,感知周邊計算過後,更新路徑繞過障礙物,最後到達目的中,通過感應器感知到路線上存在著障礙物後,功能之一就是避障。避障是指機器人在行走過程機器人要在環境中隨心所欲地移動,需要的基礎 避障機器人通過 計一台避障車吧!器、雷射測距儀、一般的相機、RGB-D感測器…等。讓我們透過教材,一不同的原理和特點有著不同的應用,目前常見的有紅外線感測器、超音波感測感應器了解自身周圍障礙物信息,避障感應器各式各樣,依照起設 生活應用發預防跌落、避免纏繞或爬坡等功能。一個很重要的方面,除了基本躲避障礙物功能之外,有些更進一步開機器人除了內部搭載智能化避障性能之外,具備算法的智能晶片也是間的位置關係,亦有結合紅外傳感器來進行導航。掃地圖,也有透過導航系統建立室內地圖和物體之人,有些透過雷射測距的方法生成室內地避障感應的應用非常廣泛,例如掃地機器


24 零件清單 1 2 5 3 4 1235mm 35mm x14 1 x2 40 x2 10 x2 39 x2 29 x2 14 x1 65 x2 2 x6 12 x2 23 x1 48 x1 49 x2 50 x1 56 x1 59 x2 60 x2 46 x1 21 x1 43 x1 44 ×2 9 10 ×2 7 8 6 2 or 4 2 or 4 2 or 4 1 or 3 1 or 3 1 or 3























完成圖 25 避障車4 程式範例 模型操作影片 12 13 11 馬達A 馬達B 馬達B 感測器超音波 超音波感測器超音波感測器馬達A 馬達A 馬達B






1 2 3 組裝完成 實驗完成 創作完成 自我評量 26 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,調整程式,將避障車的往左閃避改成往右閃避。應與作動。做做看,在避障車的前方設置障礙物,看看避障車如何感
模型 回顧 27 3.火星探測車1.汽車 4.避障車2.推土機 請利用學過的模型跟原理,設計出一台掃地機器人。 專題製作15




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計 規劃 28 我的作品照
29 想想看 一般客機與直升機相似與相異的地方在哪裡?你曾經夢想過自己在天空中自由自在地飛翔著嗎?「飛」是人類一直以來的渴望與追求!產業革命後,生產力的蓬勃伴隨文明的進步,機械工業使直升機由幻想進入了探索。 1903 年,萊特兄弟 (Wilbur and Orville Wright)製造的固定翼飛 機飛行成功;1907 年,法國人保羅.科爾尼(Paul Cornut 直升機的運作原理!成為直升機的上升力,這也就是直升機的飛行原理。透過教材,讓我們進一步了解轉動,產生一股向下氣流,氣流與地面以及空氣產生作用力與反作用力,那股力便直升機的飛行原理是什麼?直升機啟動時,直升機的旋翼產生轉動,因為旋翼的升機被稱為「人類第一架直升機」。)研製出一架全尺寸載人直升機,這架直 直升機 應用科學 飛行原理6 生活應用 直升機依照用途可分為民用與軍用兩種: 1. 觀光等,機上沒有武器裝備僅有該用途所需的裝備。地質勘探、空中攝影、短途運輸、農業用途、採訪民用直升機:用於醫療救護、緊急營救、 2. 賑災等,機上裝載裝甲和武器,並強化飛機性能以提供軍事用途。軍用直升機:用於武器運送、後勤支援、戰場救護、軍事攻擊、救援


30 零件清單 x2 13 5 6 3 4 2 1 27 25 x16 1 x1 31 x2 10 x1 60 x1 38 x1 29 x3 14 x6 21 x2 22 x1 65 x4 2 x2 9 x4 12 x2 11 x3 23 x1 25 x1 27 x1 33 x1 46 x2 45 x1 41 x1 42 10 7 8 42 41 9 11 ×2 ×2


















31 直升機6 完成圖 模型操作影片 程式範例 35mm70mm 1213 15 14 馬達A 馬達A 馬達A







1 2 3 組裝完成 實驗完成 創作完成 自我評量 32 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,改變程式,利用音量控制直升機的速度。做做看,用聲音控制直升機的啟動與停止。
生活應用
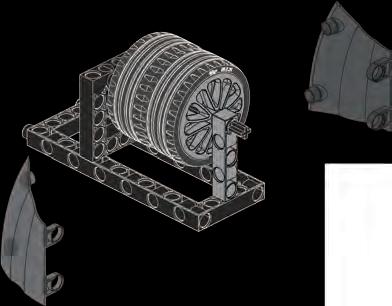
33 想想看 可以隨身帶著走的電風扇,它們有哪些不同呢?你看過哪些電風扇?在天花板上的電風扇、在牆壁上的電風扇、 電風扇 應用科學 氣壓與風7
變的。透過教材,一起認識電風扇並一起感受風的舒適吧!器一樣,電風扇也可以在一定的距離內遙控操作,但主要驅動的原理基本上是不現代風扇還應用了電子技術和微電腦技術可以遠距離遙控,如同冷氣或電視遙控炎炎夏熱,電風扇是家家必備的電器用品。一個圓圓的罩子,加上扇葉,按下開關後,空氣開始流動,「風」拂面而來。電風扇怎麼運作的呢?電風扇以電驅動扇葉旋轉,在扇葉軸心處空氣流速慢氣壓大,扇葉外緣空氣流速快氣壓小,高壓往低壓前進,氣流便從電扇後方流往前方,「風」就這樣產生了。 扇的前方,亦可以感受到風的流動。出,因高壓與低壓的不同,進而牽引空氣的流動,使我們站在無葉風面旋轉,底座四周吸入空氣後加以增壓,空氣自窄縫中噴裡面。它的運作方式是將葉片藏在底座,葉片在裡真的沒有扇葉,實際上是將扇葉隱藏在底座現今發展出「無葉風扇」,但無葉風扇並非


34 零件清單 x2 13 x10 1 x2 31 x1 32 x2 10 x2 60 x2 38 x1 37 x3 14 x1 16 x1 18 x2 21 x1 65 x8 2 x2 3 x1 5 x3 12 x3 23 x3 27 x2 34 x2 46 x1 51 5 7 3 4 6 2 70mm 1 9101112 8 70mm 孔洞 A A



















35 完成圖 電風扇7 OK 模型操作影片 程式範例 15 16 14 100mm 馬達B 馬達A馬達A 馬達A 馬達B 馬達B 13







1 2 3 組裝完成 實驗完成 創作完成 自我評量 36 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,改變連桿的設計,讓風扇有不同的擺幅。做做看,為電風扇的扇葉貼上紙張,觀察風力是否會變大。
水果進行擠壓研磨,果汁透過濾網流出,果渣從排渣口排出。見的果汁機是低速擠壓式果汁機,它利用內部的螺旋桿低速旋轉,對心力使果汁流入果汁杯,而果渣則甩進收渣桶。另一種常機,它是利用刀網高速轉動把水果粉碎,強大的離目前普遍的果汁機類型是高速離心式果汁果汁機是日常生活中最容易見到的攪拌器,
37 想想看 市面上的攪拌器各式各樣,它們分別有哪些不同? 攪拌器 應用科學 離心力8 這些都算是攪拌器。搗打材料的食物攪拌器。日常容易見到的果汁機、打蛋器、混合麵粉的攪拌機,攪拌器用在許多地方,例如工程上攪拌混凝土的機器、食物烹調上用來攪動或攪拌混合,達到省時省力。的軸在攪拌槽中旋轉,將多種原料進行槳葉組成,透過齒輪裝置運作,帶有葉片攪拌器主要由電機、減速裝置、攪拌軸和懸浮顆粒得以混合、分化或脫泡等。強大的離心力,使溶液中的氣體、液體或物中轉動。攪拌的過程中產生「離心力」,攪拌是什麼?攪拌是用手或器具在混合 生活應用


38 零件清單 x12 1 x2 31 x3 10 x2 61 x2 38 x1 14 x2 16 x1 20 x1 15 x1 65 x3 2 x2 12 x2 23 x1 26 x1 25 x1 33 x1 46 x2 47 5 4 6 123 11 10 9 7 8

















39 攪拌器8 完成圖 模型操作影片 程式範例 馬達B 馬達A 馬達A 馬達A 馬達B 馬達B 13 14 12 70mm70mm






1 2 3 組裝完成 實驗完成 創作完成 自我評量 40 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,利用其它積木為攪拌器設計出一個容器。做做看,用杯子裝一些碎紙屑,觀察紙屑被攪動的情形。
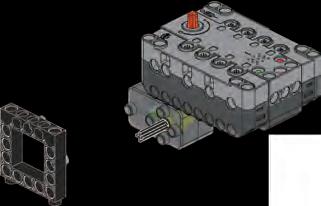
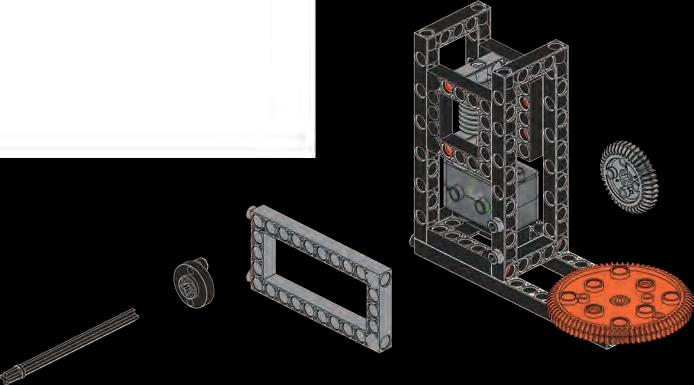
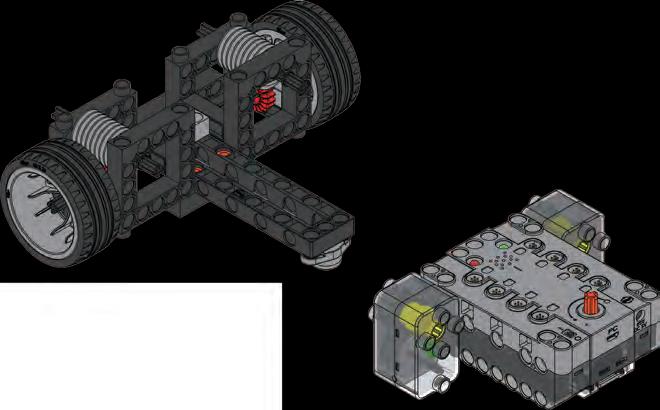
41 想想看 鑽台的發明給人們帶給哪些便利? 鑽台 應用科學 旋轉運動9 機的電鑽,這種電鑽是目前最普遍使用的電鑽。明出電鑽。十九世紀末,澳洲人發明可攜式電鑽。二十世紀初,德國發明槍把和扳十九世紀,奧地利人將電動機和鑽子組合,發著走,但鑽台體型較大,無法輕易移動。們最容易區別的地方在於:電鑽可以隨身帶了,那麼鑽台是什麼?鑽台跟電鑽很相似,他但是你看過鑽台嗎?鑽台你可能就比較陌生你看過電鑽嗎?大多數人的答案通常是「有」。電鑽是建築工地、裝潢整修、機械工業會使用的工具,經常用以鑽孔、打洞、拔螺絲釘或是打螺絲釘;鑽台比起電鑽體型較大,但同時能夠作用的範圍更多,現今主要用以各種金屬上鑽孔,鑽台的使用是將加工物件固定不動,鑽頭垂直向下旋轉進行作用。 生活應用要設備。通孔、盲孔、擴孔、鉸孔…等加工,是機械製造和各種修配工廠的重中心轉動加工。鑽台結構簡單,加工精度相對較低,可以進行鑽孔、使用過程中,加工物件不動,將鑽台刀具移動對準鑽孔同,鑽台同時發展出各種不同功能的機台型式。大小、深淺、數量以及加工物件材質的不鑽台可用於各種金屬上鑽孔,根據鑽孔的


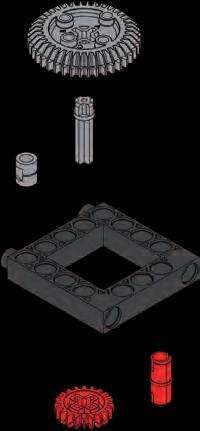
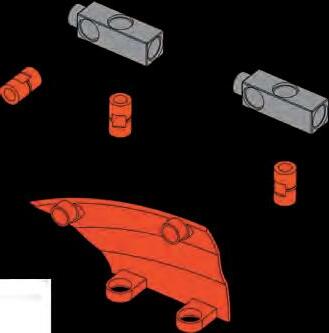
42 零件清單 3 4 12 100mm 70mmx2 13 x10 1 x2 31 x1 32 x1 10 x2 47 x2 63 x2 60 x1 36 x1 37 x2 38 x4 14 x1 15 x1 16 x1 17 x2 18 x1 48 x1 49 x1 65 x15 2 x10 3 x3 6 x2 7 x2 12 x3 23 x2 24 x1 27 x2 26 x1 34 x1 46 x2 45 5 6

































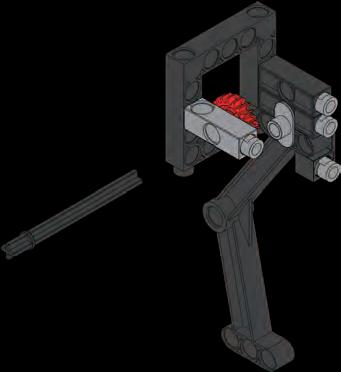
43 鑽台9 13 12 1011 79 8 70mm 2 or 4 1 or 3 2 or 4 2 or 4 1 or 3 1 or 3








44 14 15 16 17 18 19 20








按壓感應器按壓感應器B A 按壓感應器 A 按壓感應器 B 按壓感應器 B 按壓感應器 A 45 鑽台9 完成圖 模型操作影片 程式範例 馬達B馬達A 馬達A 馬達A 馬達B 馬達B





1 2 3 組裝完成 實驗完成 創作完成 自我評量 46 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,改造模型,將鑽台變成手持電鑽。做做看,利用旋鈕跟按壓感應器來控制鑽台。
模型 回顧 47 6. 直升機 8. 攪拌器 7. 電風扇 9. 鑽台 請利用學過的模型跟原理,設計出一台脫水機。 專題製作210




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計 規劃 48 我的作品照
最前端的位置,以利於機器人撞擊障礙時,能夠第一時間做出感測並且轉向。告訴機器人是否已經接觸到物體。在此,請注意!按壓感應器要安裝在整台機器後,會啟動轉向的程式,促使觸碰式機器人轉向。觸碰式機器人有兩個感應器,本課所介紹的觸碰式機器人,當按壓感應器撞擊到物品時,按壓按鈕受到按壓感應器」(Touch才會再關上。這個功能主要就是透過「按壓現象並把門推開,直到人安全進電梯後門功能,當電梯門接觸到人體時會有個緩衝生活中,大家是否有注意過電梯的一項安全sensor)達成的。
49 想想看 還有那些地方應用了按壓或觸碰感應? 觸碰式機器人 應用科學 觸碰感應11
便會執行動作,門就會自動開啟了。當按壓感應器被觸碰後,發送器會發送訊息給主機,主機接收訊號後應用!那一個「押」的盒子是發送器並且設置按壓感應器,啟,那是「觸碰式電動門」,這也是觸碰感應的一個的小小盒子,按壓下去之後門就會自動開現今許多商家的門口上面都裝設一個「押」
生活應用


50 零件清單 x5 13 x30 1 x2 10 x1 14 x2 18 x3 21 x4 6 x5 12 x3 23 x1 26 x2 28 x2 31 x2 34 x2 39 x2 40 x1 43 x1 44 x1 47 x2 51 x1 56 x1 59 x2 61 x2 63 x1 65 x2 33 B 2 70mm A B 1 3×2 ×2 5 6 4 A 7 8 28














51 11程式範例觸碰式機器人完成圖 模型操作影片 9 10 B A B A B











1 2 3 組裝完成 實驗完成 創作完成 自我評量 52 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,設定障礙物,讓觸碰式機器人朝你想要的方向前進。反應。做做看,讓觸碰式機器人朝平坦的牆壁前進,觀察機器人有何
53 想想看 繪圖上的小幫手吧!現在就讓我們一起跟著教材,創造一個專屬於自己的繪圖機器人,讓機器人成為利用機械系統規律的運作,將誤差縮減到最小並能精準地畫出線條。要畫出一條「直線」是很困難的。但繪圖機器人能夠解決這個問題,繪圖機器人障礙,以手畫出直線舉例,因為手的構造以及使用方式的影響,若未經長期訓練,今天的課程要來教大家製作繪圖機器人。繪圖機器人能夠克服「人」在繪畫上的為什麼人的手很難畫出一條完美的「直線」?試試看,在紙上畫出二條直線,一條線用直尺去畫,另外一條線不依靠任何工具自己畫出來。畫完之後觀察那兩條線,有沒有發現,不憑藉任何工具畫出來的那條線有點不「直」,怎麼好像有點歪歪的,為什麼呢?科學應用機械系統 繪圖機器人12 生活應用配,展現人工智慧的想像力。使用者僅需說出想要繪製物體的名稱,機器人便可進行相關素材的匹隨計算能力成熟,繪圖機器人甚至可以自行生成動畫電影劇本。往後,令一出,繪圖機器人便將開始自行完成一幅藝術品。伴工智慧技術,舉例來說,只要設定好程式,當指以輸出簡單的圖像,繪圖機器人更結合了人隨著科技的日新月異,繪圖機器人不僅可


54 零件清單 x5 13 x24 1 x2 3 x1 5 x2 10 x2 14 x1 18 x2 16 x4 21 x4 6 x5 12 x3 23 x1 26 x2 31 x3 28 x3 34 x2 39 x2 40 x1 56 x2 51 x1 59 x2 61 x1 65 x1 60 x2 33 2 1 A B 3 ×2 ×2 70mm 28




55 繪圖機器人12 5 6 7 4




56 11 A C C 8 9 10 插入孔洞B 28








57 繪圖機器人12 完成圖 程式範例 B A C 模型操作影片








1 2 3 組裝完成 實驗完成 創作完成 自我評量 58 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 圓弧線。試試看,修改程式,利用馬達的速度差,讓繪圖機器人畫出做做看,操作繪圖機器人畫出一條直線。
59 想想看 追光儀的感應器如同人類的哪個器官? 13 追光儀吧!便會緊追隨著太陽移動。這樣的設計是不是很有趣呢?就讓我們開始動手做本課的追光儀,即是透過光度感測器(Ligh隨時偵測太陽的位置調整方向,以利達成在單位面積內能吸收到最多的太陽能。是讓太陽能光電板與陽光保持垂直,system),太陽能追日系統的主要目的設計一個「追日系統」(Tracking隨時保持高效率發電呢?沒錯,就是位置都不同,我們該如何讓太陽能板嗎?但一天當中,不同的時間太陽的時,是太陽能發電效率最高的時候談到綠能,您知道陽光直射太陽能板sensor)去感應光源,測得光源後科學應用趨光性 追光儀 生活應用進行光合作用。而轉向。植物的向光性使枝葉朝向太陽光的方向生長,以利吸收光能現象稱為「向光性」,常見例子即是向日葵,向日葵會隨著太陽的移動會盡可能地躲避光線的刺激。植物將器官面向光源生長的正趨光性的生物會本能地靠近光源,負趨光性的生物種,一種是正趨光性,一種是負趨光性。擁有指生物對光線反應的運動,趨光性分為兩你知道嗎?生物也會追光喔!「趨光性」是


60 零件清單 x12 1 x2 31 x2 10 x1 44 x1 62 x1 61 x1 60 x2 36 x2 37 x1 41 x2 14 x2 16 x1 18 x2 21 x1 51 x1 65 x19 2 x4 6 x6 12 x3 23 x1 24 x2 25 x3 27 x2 28 x1 29 x1 30 x1 34 x3 33 x1 43 x1 42 3 4 5 6 2 1 35mm 65mm A B 12 11 9 10 7 8 28















61 13 追光儀 完成圖 A B 程式範例 模型操作影片 15 17 18 14 16 70mm70mm A B 13 28
















1 2 3 組裝完成 實驗完成 創作完成 自我評量 62 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,讓追光儀在偵測到亮度達900以上時,發出聲音。儀),看看追光儀如何作動。做做看,將電燈關閉只留一盞燈(或者是用手電筒照射追光
63 想想看 你看過毛毛蟲嗎?毛毛蟲的構造及移動方式是什麼? 避光毛毛蟲 應用科學 齒輪與連桿14 讓大家更加清楚什麼是負趨光性!方式,讓毛毛蟲以「避光」的方式作動,除了讓大家清楚毛毛蟲的運動方式之外,若你對於負趨光性還有些陌生的話,透過課程,我們將模擬毛毛蟲的構造及移動蚯蚓、蝸牛、負子蟲等。或遮蔽物下,有些生物為了閃避光線更還會鑽到泥土裡。負趨光性生物例如渦蟲、會盡可能地避開光線,除了躲藏在樹葉中負趨光性是躲避光源的一種習性,生物了,這一課我們一起來認識「負趨光性」。正趨光性於上一堂課程中向大家介紹過光(正趨光性)或躲避強光(負趨光性)。許多生物具有趨光性,可以使它們趨向強 生活應用將亮度調整眼睛舒適的亮度,除了使用上的方便,更可以節能減碳。日常生活中。裝設有環境光感測器的電子產品會自動調整螢幕亮度,心,它普遍用於電子產品,例如電視、電腦、平板、手機等感到非常不舒服。「環境光感測器」的發明十分貼這時如果電子產品的螢幕亮度過高,眼睛會當室內的光暗下來時,眼睛的瞳孔會放大,


64 零件清單 3 3 2 4 6 100mm x18 1 x2 38 x2 39 x2 40 x1 41 x1 42 x1 43 x1 44 x2 51 x1 60 x1 62 x1 65 x4 14 x1 16 x4 19 x6 21 x2 2 x10 3 x2 9 x6 12 x5 23 x1 24 x1 32 x2 28 x1 26 1 5 ×2 ×2 42 41













65 避光毛毛蟲14 7 9 11 12 10 8 28 28






66 13 14 15 16 17 馬達A 馬達A 光度感應器 光度感應器 光度感應器







67 避光毛毛蟲14 程式範例完成圖 模型操作影片


1 2 3 組裝完成 實驗完成 創作完成 自我評量 68 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 試試看,改變程式,將避光毛毛蟲變成用音量控制。做做看,適時的壓住避光毛毛蟲的尾巴,加快它前進的速度。
模型 回顧 69 11.觸碰式機器人13.追光儀 14.避光毛毛蟲12.繪圖機器人 應器)。請利用學過的模型跟原理,設計出一個日光搖擺招牌(光度感 專題製作315




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計 規劃 70 我的作品照
71 想想看 夾物機器人與夾娃娃機的相同處與相異處在哪裡? 16 夾物機器人吧!現在知道了夾爪的秘密後,您是不是覺得又神奇又興奮呢?就讓我們開始動手做爪力,夾爪緊緊抓牢物品不鬆脫,這是夾爪威猛有力原因。動能帶動齒輪,但齒輪無法帶動渦桿」的特性,使夾爪在馬達靜止的情況下維持反、轉速慢,但扭力變大,利用「渦桿轉帶動夾爪齒輪組,此時,兩齒輪方向相它的原理是,當馬達傳動渦桿後,渦桿在於「渦桿傳動」的運用。取物品時不鬆脫呢?其實很簡單,秘訣秘訣嗎?到底是什麼樣的關鍵讓夾爪夾您知道夾物機器人的夾爪威猛有力的 夾物機器人 應用科學 渦桿傳動 生活應用爪力,讓玩家可以輕易抓到物品喔!幣卻抓取不到物品,最後達到保夾金額時,這時機台會開啟最大強弱。每個夾娃娃機都會設定保證夾取的金額,當不斷投有電路控制板,可以藉由內部電壓設定爪力的強理跟夾物機器人很相似喔~娃娃機台內你玩過夾娃娃機嗎?其實夾娃娃機的原


72 零件清單 3 4 5 6 1 2 70mm 70mm 70mm 70mm ×2 x34 1 x8 31 x3 10 x2 9 x1 44 x2 45 x2 61 x2 60 x1 36 x4 37 x6 14 x4 13 x2 16 x2 17 x5 18 x4 19 x1 20 x7 21 x2 46 x1 56 x1 65 x22 2 x7 3 x3 4 x6 6 x8 12 x5 11 x6 23 x1 24 x1 25 x1 26 x3 29 x4 34 x7 33 x1 43 x2 39 x2 40 x3 38 x1 63 x2 50 x1 58


















73 16 夾物機器人 A B 7 8 9 10 11 12 13







74 C 14 15 16 17 18 19 20 70mm 35mm 70mm








75 16 夾物機器人 D 21 22 23 24 25 26 27 28 70mm









76 29 30 31 35mm 35mm 32 33 34 35 36 37 70mm









77 16 夾物機器人 完成圖 程式範例 模型操作影片 D C B A 38















1 2 3 組裝完成 實驗完成 創作完成 自我評量 78 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 夾取物品。試試看,改變夾爪的構造,讓夾物機器人可以更有效率的如橡皮擦、鉛筆、鉛筆盒等)。做做看,以自己的夾物機器人,試者夾取各種不同的物品(例
的起降架或是火車車輪的運動…等。用於機器中,例如電扇的左右擺動、天平的平衡、汽車的轉向、飛機直線移動、往復運動、轉動或空間上等複雜運動。連桿機構廣泛應遞機械能的一種裝置,透過設計與計算,連桿機構可以完成達連桿組中運動的裝置。簡單說來,連桿機構是用以傳「連桿組」由多個連桿所組成。「連桿機構」是傳是在機構中,傳達動力並且產生約束的裝置。「連桿組」、「連桿機構」這些名詞。「連桿」桿機構是什麼呢?首先我們先了解「連桿」、
79 想想看 生活中還有那些地方使用到連桿機構? 蠍 子機器人 應用科學 連桿機構17 人玩起來相當過癮!機器人有個栩栩如生的威猛尾巴,好像隨時都會被蠍子機器人用尾針攻擊,讓本機器人最酷炫的地方在於尾部,透過連桿機構(Linkage蠍子的尾巴除了用來攻擊,在運動中更具有保持平衡的作用。它的尾刺刺中,很快就會死亡。作用。不管什麼小動物,如果被醉作用,對心臟和血管起收縮的毒性很強,對呼吸中樞有麻的尾巴尖端有鉤狀毒刺,尾刺形體與動作設計而成的。蠍子器人」,是模仿自然界中蠍子的察大自然。本課介紹的「蠍子機時,有時靈感來源是取自於觀您知道嗎?我們在設計機器人mechanism)使蠍子 生活應用


80 零件清單 x29 1 x3 10 x2 9 x2 8 x1 44 x2 45 x2 61 x1 63 x2 60 x2 36 x1 41 x1 42 x3 14 x6 13 x3 16 x5 18 x4 20 x7 21 x3 22 x2 46 x2 47 x2 50 x1 48 x1 49 x1 65 x17 2 x21 3 x3 4 x5 6 x3 5 x7 12 x4 23 x2 24 x2 25 x2 27 x3 29 x6 28 x5 34 x9 33 x1 43 3 4 2 1 插入孔洞C 5 35mmB










81 蠍 子機器人17 13 12 11 9 10 ×2 ×2 7 ×2 C D D 8 6 C 35mm 28









82 14 15 ×2 ×2 17 16 18 19 ×2 20 21 22 23 28












83 蠍 子機器人17 24 25 26 27 28 30 29 按壓感應器 28 28








84 31 ×2 孔洞A插入 孔洞A插入 32 33 在內側請注意零件編號 34 35 A 在內側請注意零件編號 36 28 28












85 蠍 子機器人17 完成圖 模型操作影片 D C D C B D C A B D C A B 程式範例 37 38 此 程 式 的 第 部 分 是 個 循 環 , 只 要 按 壓 感 測 器 沒 有 被 啟 動 , 它 就 會 不 斷 地 重 複 執 行 。 此 程 式 積 木 使 蠍 子 機 器 人 能 向 前 移 動 。 重 複 3 - 5 次 當 按 壓 感 測 器 被 啟 動 時 , 將 運 轉 馬 達 接 頭 1 與 2 , 使 蠍 子 機 器 人 的 爪 子 與 尾 巴 作 動 , 並 同 時 關 閉 馬 達 接 頭 3 與 4 。


















1 2 3 組裝完成 實驗完成 創作完成 自我評量 86 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 速度。試試看,透過參數的修改,改變蠍子機器人尾巴攻擊的做做看,驅動蠍子機器人的爪子和尾部進行作動。
87 想想看 機械手臂與人類手臂,各有什麼優缺點呢? 機械手臂 應用科學 自動化機械18 帥呢?就讓我們開始動手做吧!手臂」,底盤可做360°旋轉,關節處的馬達正反轉可以調整本課所要組裝的「機械手臂」,被分類為行走運動類型,是屬於「圓柱座標機械體放置在新的位置,就像工廠生產線上的機械臂一樣。臂可以上下移動,打開和關閉爪子以抓取物體並旋轉。這使得機械手臂可以將物「您聽過機械手臂嗎?」相信當您被問到此問題時,通常都會回答「yes」。機械手臂在產業自動化的應用已經相當廣泛,尤其是在工業界,機械手臂的運用更是普遍。機械手夾爪高度,是不是很 生活應用模具製造、電子製程,拓展到醫療、農業、服務業等。的不同,機械手臂的開發與應用也是各式各樣。從原本的汽車工業、的應用,是在美國汽車工廠的壓鑄作業上。隨著產業需求細與耐用性上可以減少許問題。第一台機械手臂人工無法從事的高精密工作,機械手臂的精機械手臂主要用於減少人力成本或是完成


88 零件清單 x35 1 x3 10 x2 9 x2 8 x2 7 x9 31 x1 32 x3 36 x3 37 x2 38 x2 39 x2 35 x3 14 x5 13 x2 17 x5 18 x3 19 x1 21 x3 22 x11 33 x7 34 x2 40 x1 41 x1 42 x1 43 x18 2 x13 3 x4 4 x8 6 x4 5 x10 12 x5 11 x5 23 x2 24 x2 25 x4 27 x3 26 x1 29 x1 30 x3 28 x1 44 x2 45 x1 48 x1 49 x2 50 x2 51 x1 52 x1 58 x2 60 x2 61 x1 64 x1 65 A 1 4 5 6 7 8 9 3 70mm





















89 機械手臂18 10 11 12 13 14 15 16 17 ×2 70mm 70mm 插入孔洞B













90 C 18 19 20 21 23 22 70mm 70mm 65mm 24 25 70mm 28 28










91 機械手臂18 D 26 27 28 29 30 31 32 33 34 70mm 35mm 28










92 70mm 35 36 37 38 39 100mm 在內側請注意零件編號請注意零件編號在內側 40 41 42 70mm ×2
















93 機械手臂18 完成圖 A B C D A 模型操作影片 程式範例 43 延長線







1 2 3 組裝完成 實驗完成 創作完成 自我評量 94 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 應器及旋鈕控制。試試看,加入按壓感應器,修改程式,讓機械手臂可以以感圍,嘗試拾起和移動它們。做做看,將物體(例如橡皮擦、鉛筆、鉛筆盒)放在機械手臂周
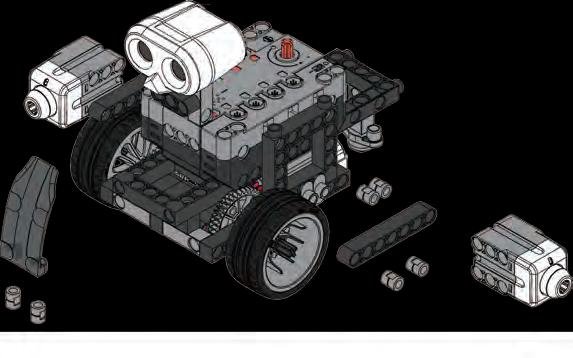
95 想想看 為什麼人類會開發人形機器人呢? 應用科學 人工智慧19 揖喔!是不是很可愛呢?就讓我們開始動手做吧!什麼是人形機器人呢?顧名思義就是模仿人類外觀和行為的機器人。人型機器人學認為人型機器人的行為舉止與人類十分相近,所以人類會以相同的態度去與人型機器人相處,而人型機器人學的目的便在於去探索人類因此產生的互動、認知與情感。本單元將帶您做出一隻人形機器人,當人形機器人感覺物體非常靠近時,它可以閉合手臂並抓住物體,不僅如此,它還是一個很有禮貌的機器人喔,當它看到人會往後退一步,並且跟您鞠躬作 人形機器人 生活應用 人工智慧(Artificial 功能、客服聊天機器人、人臉辨識應用、自動規劃等。外,還加以研發機器推理決策與理解學習的能力,例如手機語音辨識的邏輯程式去做執行;現今的AI除了模擬人類的智慧之技術。AI首次出現於1950年,當時的AI僅將寫好AI)是透過電腦程式編寫來呈現人類智慧的Intelligence,簡稱


96 零件清單 x28 1 x2 10 x2 9 x2 8 x2 7 x9 31 x1 32 x2 36 x4 37 x2 38 x2 39 x5 14 x2 13 x2 17 x5 18 x5 19 x4 20 x2 21 x2 22 x10 33 x6 34 x2 40 x1 41 x1 42 x1 43 x22 2 x12 3 x12 6 x12 12 x5 11 x6 23 x2 25 x2 27 x3 26 x2 29 x1 44 x2 45 x1 48 x1 49 x2 50 x2 46 x2 47 x1 59 x1 56 x2 60 x2 61 x1 65 70mm 5 超音波感測器×2 3 4 2 1











97 19 人形機器人 A B 7 8 9 11 10 6 35mm 70mm 70mm 70mm A B







98 15 13 14 16 12 70mm 35mm 17






99 19 人形機器人 18 19 20 21 22 23 100mm







100 24 25 26 27 ×2 28 29 30







10119 人形機器人 C 31 32 33 34 35 號在內側請注意零件編 70mm 70mm C 號在內側請注意零件編 36 37











102 D C 38 39 40 70mm 70mm 41 42 43 D ×2 D








10319 人形機器人 完成圖程式範例 模型操作影片 A A B D C 44









1 2 3 組裝完成 實驗完成 創作完成 自我評量 104 動手 玩實驗 動手 玩創意 Smart Manual 網頁版 動作。試試看,試著透過程式的撰寫,為人形機器人添加不同的如何作動。做做看,在人形機器人前面在放置一本書,觀察人形機器人會
模型 回顧 105 16.夾物機器人18.機械手臂 19.人形機器人17.蠍子機器人 請利用學過的模型跟原理,設計出一個投球機器人。 專題製作420




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計 規劃 106 我的作品照
MADE IN TAIWAN 本期內容之著作權,依法由智高實業股份有限公司享有 未經正式書面授權‧禁止轉貼節錄 © 智高實業股份有限公司 2021 - ALL RIGHTS RESERVED R21#1203-CN
