











1 發明 是可以學習的 Gigo 智高 Learning 決問題的能力,更能將這些知識活用,進而學習創新的技巧與能力。我們希望小朋友透過動手玩積木的過程中,快樂地學習科學知識,培養正確的學習態度及解5.用積木做實驗,零件可重覆使用,省時省力。4.課程由淺入深,涵蓋各國生活科學課綱,並與日常生活應用結合。3.天生我才必有用,兼顧個人學習與團隊分組合作。2.跳脫傳統教學架構,遊戲競賽中學習創新。1.課程以積木為主軸,每堂課都有積木組裝創作。Lab學習實驗室全系列包含個人包裝及學校包裝,特點如下:


2 第5課 專題製作(1) 第6課 鯨魚 第9課 直升機 第10 課 專題製作(2) 第19課 機械手臂 第20課 專題製作(4) 第18課 射擊炮塔 第17課 智慧避障車 第16課 鐵路平交道 第15課 專題製作(3) 第14課 咕咕鐘 第13課 自動門 第12 課 上掀式車庫門 第11 課 螢火蟲 第7課 飛鳥 第8課 飛機 第2 課 蹺蹺板 第3 課 升降台 第4課 步行機器人 第1 課 前言目錄安全資訊盪鞦韆 1 41 51 59 15 71 23 79 31 89 95 105 2 3 45 53 13 65 19 77 27 85 33 37 目 錄 進入編程積木的世界認識S4A零件清單 5 7
3 安全資訊 安全注意事項給家長們的建議LR6)。請勿將電線或其他配件插入家用插頭,這會造成極度的危險。本產品只適合使用3號電池(1.5-Volt,開始組裝模型之前,請告訴您的孩子一些用電的注意事項及可能發生的危險。它可以幫助孩子們在組裝各種模型的過程中探索並了解電路與電磁。這是一組適合10您就可以知道如何組裝零件並且如何組裝您所想要的各種模型。請詳讀教學手冊內的安全注意事項並保留備用。建議您可以依照說明書裡面的步驟組裝模型。很快地,歲以上兒童的產品。AA/ ˙ ˙ ˙ ˙ 建議事項建議使用鹼性電池,以確保所有模型都能作動。不可以把電線插進插座裡。千萬不可以使用家用電源來進行實驗,它的高電壓極度危險,甚至可能有致命的風險!為了讓模型運作,你需要六個3號電池(1.5伏特,3號鹼性電池),或六個3號充電電池(1.2伏特,至少1100mAh)。由於電池在貨架上的有效期較短,因此並不包含在本產品中出貨。不可以讓供電線路短路,短路可能會造成線路過熱而使電池爆炸。不同種類的電池,或是新舊電池之間不要混用。不要混用鹼性電池、碳鋅電池、或可充電電池。安裝電池時,正負極的方向一定要正確,將電池小心地安裝進電池盒中。一定要把電池盒的蓋子蓋上。 ˙ ˙ ˙ 充電電池在充電之前,一定先要從充電電池一定要在大人的監督下進行充電。不可以充電的電池,如果拿去充電可能會發生爆炸! 電池盒中拿出來。 當你做完實驗之後,將電池從電池盒中拿出來時,請注意每個實驗特別提醒的安全訊息。使用馬達的模型,都應該要大人的陪同監護下使用。所有用到電池的實驗,都應該先請大人檢查,確定組裝都正確後,再開始操作。避免電池受到外力而產生變形。切記不要讓電池和銅板、鑰匙、或其他物體直接接觸。一定要遵循環保法規處理廢棄的電池。

4 https://build.t2t.io/ur?qr=SJhOkpPmL 注意及人員的傷害。不正確的使用電池可能會產生漏電的現象,這有可能造成電池周邊環境的損害、火災的可能性#1247R說明書提供更多主題及感測器的延伸課程,深入探究槓桿、齒輪、連桿、渦桿或車體結構等應用,進而理解在基礎模型結構下的共用性與可變性。另外完整涵蓋迴圈、選擇結構、運算式、變數及廣播…等程式題材。使用本套組可額外組合出#1247R說明書內的24個模型。更多內容請參考#1247R線上版說明書。 #1247R線上版說明書 產品清潔方式 ˙ ˙ 零件僅可以使用稍微沾濕的抹布擦拭。電池盒清潔前,請先將電池取出。請勿使用清潔劑。 這組玩具並不適合3警告 小零件。請將玩具放在幼兒無法取得之處。歲以下的幼兒使用,其中包含小朋友可能吞食的細 # 1247R-CN304 件/組 10 10 INVENTING CAN BE LEARNEDINVENTING CAN BE LEARNED 40 40
























5 認識S4A 為什麼要學習程式語言? S4A 是什麼 什麼是「程式設計」?? 麼做,會不會造成教育過於偏向理工走向?但是推廣程式教育的目的在於:務教育;台灣教育部已經將「程式語言」列入國高中生必修課程,讓學生跟上世界的潮流。或許也有人會質疑這有鑑於學習程式語言的重要與迫切性,歐美各國無不開始積極的推展程式設計教育,並將之納入中小學的義腦下指令,讓它為你服務而不必受限於他人的設計。程式設計,就是與電腦溝通的語言;就像我們學習外語才能與外國人溝通。學會了程式設計,便可以直接對電接下來,我們再進一步的說明什麼是Scratch?什麼又是Arduino?以說是一大福音,學生不再需要有高深專業程式知識,每個人都能完成Arduino的互動裝置。組裝的模型。讓Scratch玩家們可以進一步將創意延伸到實體的互動科技裝置上。這種方式對中小學教育可的裝置。這大大降低了使用者的門檻,即便是不懂英文的學童也可以將自己的想法,透過S4A來操控他們所並命名新軟體為S4A(Scratch因此,西班牙的Citilab組織(社會與數字創造中心)有鑑於Scratch的成功經驗,就改寫自由軟體ScratchS4A/Scratch車輛都可以自動駕駛。因此面對數位化時代,每個人都必須懂得如何與電腦溝通。來驅動,如此看來,未來的日常生活勢必會更加的數位化。甚至,在不久的將來,人們不再需要考駕照,路上的慧型手機、愈來愈頻繁運用的網路購物。這些數位時代的相關產品不勝枚舉,同時也都需要透過電腦(網路)的控制,例如:家裡車庫的遙控門、房間裡的冷氣空調溫控、冰箱、電視等智慧家電,還有現代人隨身攜帶的智在數位化的時代裡,我們已經與電腦脫離不了關係;舉凡生活大大小小的裝置與設備都需要藉由電腦數位化forArduino是Scratch的修改版本。程式語言都是以英文來書寫,無形中限制了使用的對象,forArduino),S4A簡單的來說,就是:利用拖曳積木的方式來控制Arduino 言「S4A」。我們了解學習程式設計的重要性及目的之後,接著要介紹一款專門給初學者就可以輕易上手的程式設計語 1. 2. 3. 藉由科技學習創新及表達的方式。能夠經由學習程式設計,培養學生的邏輯思考及解決問題的能力。希望培養未來的學生都具備有與電腦溝通的能力。
6 認識 Scratch 認識 Arduino Scratch是一款由MIT麻省理工媒體實驗室(MIT Media 編寫為程式,創意想法就能讓積木模型產生互動效果。Scratch畫面角色下指令,兩者產生連結後,便可以控制Arduino面板的反應,操作者只要將運用數值其產生的電壓變化會一一被轉換為數值,並由Scratch記錄下來,因此,我們進一步運用這個數值對S4A保留Scratch簡單明瞭的介面及功能,將其運用在Arduino上,當Arduino的各種感應器觸發時,最佳入門軟體,S4A也成為模型動起來的好幫手。S4A(Scratch運作,孩子便可以依照個人想法來發揮創意,玩一玩、組一組各種有趣的積木模型。sensor(感應器),像是光源感應器、溫度感應器、聲音感應器等,而這些感應器則需要一些機械原理來Arduino是一個開放硬體,是一張微控制電路板,在這張板子上可以加裝馬達、LED燈、開關,以及各種呈現變成動態展示,學程式設計讓應用更多元,孩子也能輕鬆創造屬於自己的故事!重要根基,也可以透過這項工具進行跨領域發展,將故事作品、圖像畫面、資訊呈現等內容,由靜態在現代,學習程式設計是重要趨勢之一。學童可以透過Scratch工具,掌握基本程式設計概念,建立明瞭,簡單圖像代替冗長文字,幫助學童快速掌握概念、正確操作。設計工具,它採用的是「積木」堆砌的形式編寫程式,並不涉及難懂的程式。Scratch介面設計簡單Lab)專門開發給兒童使用的簡易程式forArduino)軟體將Scratch改良後,與Arduino結合成為孩童學習基本機械原理的 如何組裝與拆卸電池蓋 A端1. 握住電池座的兩端,如圖所示 當您看到間隙時,代表電池蓋已經打開2. 使用扳手A端撬開插槽放入9V雙層電池座 蓋上電池蓋對準掛鉤以組裝電池蓋 喀! 確認每個零件有確實組裝 喀! 3 124






7 進入編程積木的世界 1. 前往S4A官方網站http://s4a.cat,如圖一所示。 2. 點擊Downloads 選項,將 S4A安裝至您的電腦,請下載並安裝符合您電腦作業系統的安裝檔,如圖二 所示。 圖二圖一 下載S4A[準備工作一]


8 3.滑鼠連點S4A安裝檔開始安裝程序,接著點擊 Next 4.這邊安裝程序顯示了S4A的用戶授權協定與著作權聲明,請選擇「I按鈕,如圖三所示。accept the agreement」,接著點擊 Next 5.安裝程序引導您選擇S4A的安裝路徑,這邊我們選擇預設路徑,接著點擊Next按鈕,如圖五所示。按鈕,如圖四所示。圖三圖四圖五



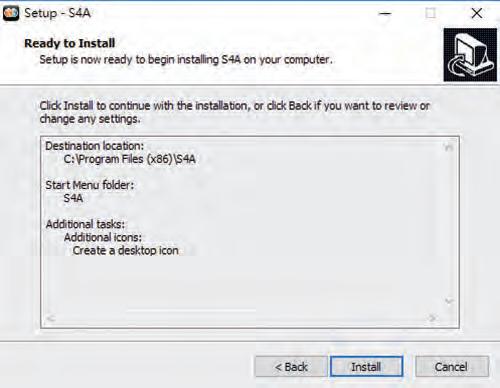
9 進入編程積木的世界 6.安裝程序引導您建立S4A在開始選單,這邊我們選擇預設路徑,接著點擊 Next 按鈕,如圖六所示。 7. 安裝程序引導您建立桌面捷徑,請勾選「Create a desktop icon」並點擊 Next 按鈕,最後,點擊「Install」 ,S4A在桌面的圖示是按鈕,等待安裝程序安裝檔案,「Finish」的按鈕會在安裝成功後出現,如圖七~圖十所示。安裝完成後圖六圖七圖九 圖十圖八





10 點選您桌面上或從開始選單中的「 角色區:呈現在腳本中會出現的各種角色或元件。舞台展示區:此區域除了顯示偵測面板狀態外,也用來呈現腳本設定的視覺效果。腳本編輯區:編寫各種腳本的區塊,拖拉程式區塊,並將它們組合成一個腳本。的腳本。程式區塊:提供撰寫腳本的各種程式區塊,依照使用者需求將程式區塊拖拉到腳本編輯區以組成各式各樣變量。主功能選項區:S4A主功能選樣區共有8種類別的程式區塊,包括:動作、外觀、聲音、畫筆、控制、偵測、運算、S4A」以開啟S4A,預設介面如圖十一所示。語言設置:點擊「設定語言」的圖示,安裝後的預設語言為英文,請選擇正體中文,以變更呈現在S4A介面上的語言為繁體中文介面,如圖十二所示。主功能選項程式區塊 S4A介面說明 圖十一 圖十二 腳本編輯區 舞台展示區角色區 [準備工作二]


11 進入編程積木的世界 點擊桌面或開始功能表的「S4A」,運行S4A 偵測。請檢查USB斷跳動(如圖)。若無跳動或顯示Searching此時在S4A軟體「舞台展示區」的偵測面板數值會不將「智高創客主控盒」接上DC電源,並開啟。插槽。使用內附USB線,連接「智高創客主控盒」及PCUSB軟體。board,接線是否正確,或再次拔出USB重新連接(4)(3)(2)(1) 經由USB線連接到PC 智高創客主控盒( 智高基礎擴展板電源孔展板也有一個直流電源輸入端口。Leonardo板MicroUSB連結至PC。除了Leonardo板直流電源輸入端口外,擴蜂鳴器、麥克風、可變電阻、按鈕、數位及類比輸入輸出連接插槽等功能,經由如圖),内建整合主版,搭配智高基礎擴展板,提供如LED燈、智高創客主控盒硬體介紹ArduinoMicroUSBLED燈Reset鍵類比訊號接口蜂鳴器智高DC馬達接口x2I2C訊號接口x2按鈕x3可變電阻MicroUSB(toPC)(直流4.5V~12V)Arduino主板電源孔(直流4.5V~12V)數位訊號接口x6 IR感應器:光源感應器:偵測外部光源變化,可應用於檢查燈光明暗。偵測距離變化,可應用於偵測障礙物。連續伺服馬達180度角度伺服馬達 [準備工作三] 以下任一符號的設備。本模型只能連接到帶有 III






12 智高創客主控盒與軟體對應指令LED(黃)D13LED(紅)D10LEDD11(綠) 伺服馬達蜂鳴器A9 D8 伺服馬達 D4 伺服馬達 D7 類比訊號 A3 類比訊號 A4 麥克風按鈕1D2A2 按鈕2A1按鈕3可變電阻A0A5種類 腳位 可變電阻 A0 按鈕1 D2 按鈕2 A1 按鈕3 A5 類比訊號 A3 類比訊號 A4 種類 腳位 麥克風 A2 伺服馬達D4/ D7/ D8 蜂鳴器 A9 LED (紅)D10 LED (綠)D11 LED (黃)D13 韌體重新燒錄 藍牙模組安裝 [準備工作四]

13 零件清單 x40 1 x10 2 3 x11 4 x4 5 x4 6 x2 7 x8 8 x2 9 x2 x2 10 x4 11 12 x4 13 x2 14 x8 15 x6 16 x3 17 x6 18 x4 x4 19 x4 20 21 x6 22 x4 23 x2 24 x4 25 x4 26 x2 27 x6 x6 28 x2 29 30 x1 31 x4 32 x2 33 x2 34 x2 35 x1 36 x4 x1 37 x3 38 39 x3 40 x1 41 x4 42 x4 43 x8 44 x2 45 x1 x1 46 x1 47 48 x2 49 x2 50 x3 51 x1 52 x4 53 x4 54 x44 x2 55 x2 56 57 x1 58 x1 59 x2 60 x2 61 x2 62 x1 63 x1 x1 64 x1 65 66 x1 67 x1 68 x1 69 x1 70 x1 71 x1 72 x1 x1 73 x1 74 75 x1 76 x1 77 x2 78 x1 79 x1 80 x1 81 x1 82 x1 83 x1

















































































14 這裡有幾點組裝模型的小技巧,請在組裝模型之前仔細地閱讀一遍。組裝技巧: 更多組裝小技巧,請參考 X《錯誤》未留空隙 O《正確》有留空隙 圖所示)。此外,傳動軸的凸緣必須墊後以免齒輪掉落。將摩擦減到最低而動力的傳輸效率提昇到最高(如上件與長條之間保持適當的距離(約1渦桿、鍊輪、凸輪、曲桿等所有智高可做力學傳動的零用傳動軸把齒輪安裝在長條上時一定要讓齒輪、滑輪、mm),這樣才能 扳手的B端面來撬出自轉軸鍵。結合鍵;想要拆除自轉軸鍵時,你也可以使用手。操作扳手時,使用扳手的A端來拔除紅色當你想要將你的模型分解開來時,可使用扳 動的力量帶入到下一個齒輪。 齒輪嚙合得很好,否則就無法讓一個齒輪傳一排,為了讓模型可以順暢的運作,你必須將在模型建置中你常可以看到幾個齒輪組裝成 A.留意組裝長條與齒輪的間距: C.齒輪組: 因內含重要訊息,請將說明書妥善保存。清單:找零件-檢查-核對 序號 零件名稱 品號 數量 1 B-短結合鍵 40 2 C-長結合鍵 10 3 C-20mm軸扣鍵 11 4 C-自轉軸鍵 4 5 C-凸輪連結鍵 4 6 C-二合一結合鍵 2 7 C-短紙卡固定鍵 8 8 C-30mm圓管 2 9 C-關節鍵 2 10 C-底盤結合器 2 11 C-雙向轉接鍵 4 12 C-單向轉接鍵 4 13 C-3孔超長齒條 2 14 C-3孔1/4弧長條 8 15 C-3孔1/4弧長條 6 16 C-3孔長條 3 17 C-3孔長條側有孔 6 18 C-3孔超長條 4 19 C-3孔圓角長條 4 20 C-5孔長條 4 21 C-5孔長條側有孔 6 22 C-5孔超長條底無孔 4 23 C-5孔超長條 2 24 C-7孔圓角長條 4 25 C-7孔圓角扁長條 4 26 C-9孔長條 2 27 C-11孔長條 6 28 C-13孔扁弧長條 6 29 C-15孔超長條 2 30 C-15孔超長齒條 1 31 C-5×5孔正方框 4 32 C-5×10孔長方框 2 33 C-5×13孔超長方框 2 34 C-8×12底盤 2 35 C-27mm馬達短軸 1 36 C-35mmⅡ軸 4 37 C-65mmⅠ軸 1 38 C-70mmⅡ軸 3 39 C-100mmⅡ軸 3 40 C-150mmⅠ軸 1 41 C-軸固定鍵 4 42 C-20T齒輪 4 43 C-40T齒輪 8 序號 零件名稱 品號 數量 44 C-60T齒輪 2 45 C-80T齒輪 1 46 C-10T鍊輪 1 47 C-30T鍊輪 1 48 C-OD23mm滑輪 2 49 C-OD33mm滑輪 2 50 C-軸轉接器 3 51 C-渦桿 1 52 C-OD70×12mm橡膠輪 4 53 C-70mm橡皮筋 4 54 C-鍊條 44 55 C-A型飾片(左) 2 56 C-A型飾片(右) 2 57 B-正方顆粒 1 58 B-正方顆粒 1 59 B-上弦顆粒 2 60 B-上弦顆粒 2 61 B-偏心眼珠 2 62 B-表情顆粒-春利熊 1 63 B-3凹正方顆粒 1 64 B-動物耳朵 1 65 B-動物嘴顆粒 1 66 B-左手顆粒 1 67 B-右手顆粒 1 68 B-雙足顆粒 1 69 C-40mm保麗龍球 1 70 B-扳手 1 71 P-造型合成紙卡(6入) 1 72 P-教學合成紙卡 1 73 C-智高創客主控盒 1 74 C-光源感應器 1 75 C-IR感應器 1 76 C-180度角度伺服馬達 1 77 C-連續伺服馬達 2 78 C-萬向滾輪 1 79 C-9V雙層電池盒(含接頭) 1 80 C-9V方形電池扣 1 81 C-MicroUSB 2.0傳輸線 1 82 C-9V雙層電池保護殼(上蓋) 1 83 C-9V雙層電池保護殼(下蓋) 1 7344-W10-C2B 7061-W10-C1R 7413-W10-T1R 7026-W10-H1R 7413-W10-S1R 7061-W10-G1W 7061-W10-W1W 7400-W10-G1D 7061-W85-F1W 7026-W10-I1SK 7061-W10-X1W 7061-W10-Y1W 7061-W10-T1D 7061-W10-V1W 7061-W10-V1S2 7026-W10-Q2W 7026-W10-X1W 7413-W10-Y1W 7404-W10-C1W 7413-W10-K2W 7413-W10-R1W 7413-W10-W1W 7413-W10-X1W 7404-W10-C2W 7404-W10-C3W 7407-W10-C1W 7413-W10-P1W 7401-W10-A1W 7413-W10-Z1W 7061-W10-T2D 7413-W10-Q1W 7413-W10-I1W 7061-W10-U1W 7125-W10-A1SK 7026-W10-L1W 7413-W10-O1D 7416-W10-C1D 7061-W10-Q1D 7413-W10-L2D 7026-W10-P1D 3620-W10-A1D 7026-W10-D2R 7346-W10-C1B 7026-W10-W5Y 7328-W10-G2O 3569-W10-D2S1 3569-W10-C1S1 7344-W10-N3S1 7344-W10-N2S1 7026-W10-L2W 7344-W10-A1W 1115-W85-F2S R10-02 3569-W10-B1D 7392-W10-L1TD 7392-W10-L2TD 880-W10-A1W 880-W10-A1R 880-W10-R1W 880-W10-R1R 7128-W22-2 7134-W22-4 7128-W10-B1B1 7128-W10-D5D 7128-W85-D6 7128-W10-F1B 7128-W10-F2B 7128-W85-D1W K30#7366-2 7061-W10-B1Y K16#1247A K16#1247A-1 1247-W85-A4 1247-W85-B2 1247-W85-B1 1247-W85-D1-1 1247-W85-D2 1247-W85-C1S R34-06 R34-07 E30#1247A 1247-W10-F1W 1247-W10-F2W






15 想想看 生活應用盪的關係。而本課模型使用馬達及鍊輪來驅動鞦韆,看看動力傳達鏈與鞦韆擺有死後永垂不朽之意,為了避諱,才把韆鞦更名為鞦韆。時慢慢發展成皇宮與富人園子裡的遊樂器具。到了漢武帝時,因韆鞦(千秋)在華文中後來為了跨越溝渠、斷崖等固定方向的地區,漸漸改為兩條繩索加上踏板的韆鞦,同鞦韆原本叫作韆鞦,一開始只有一條繩子,可以朝四面八方擺動,危險性也相對較高。盪鞦韆是一種前後擺盪的遊戲,通常由兩條繩索綁在一定高度的橫桿上,另一端繫上木板或輪胎。遊戲者透過自身的擺盪,或由他人在後面推的方式進行遊戲。在遠古時期,人們為了獲取食物及躲避猛獸常常得在樹上活動。為了在樹林間快速移動,古人用皮革製作繩索,在林間盪來盪去,這也是鞦韆最初的原型。盪鞦韆時,怎麼做可以讓鞦韆擺盪的幅度增加? 盪 鞦 韆 應用科學 鍊輪應用1 來回擺動。而從本課模型中,將會看到動力傳達鏈是如何利用馬達動力帶動鞦韆的鏈輪,常常在腳踏車、機車、一般小工廠或者工作室都可以見到它。用實體鋼之塊狀組合而成。因為造價便宜,是最為常見力傳達鏈的模式。一般的動力傳達鏈是塊狀鏈,和動力傳達鏈等等。本課的模型是採用動鏈輪的種類有許多,包括起重鏈、輸送鏈


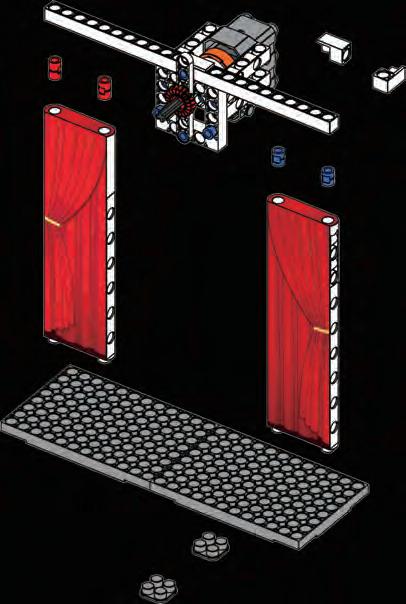
16 零件清單 150mm 5 3 4 6 2 1 ×2 ×2 x5 1 x2 2 x2 3 x2 19 x1 27 x2 29 x4 31 x2 33 x1 34 x1 35 x1 40 x1 46 x1 47 x3 50 x38 54 x1 62 x1 63 x1 64 x1 65 x1 66 x1 67 x1 68 x1 73 x1 76 x1 79



























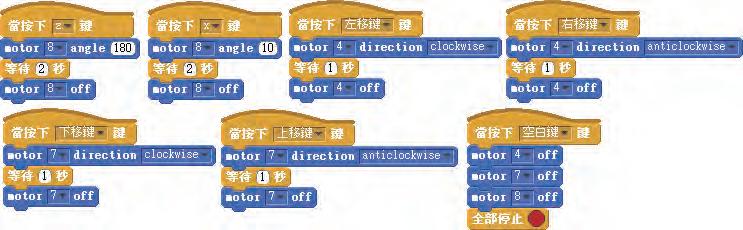
17 完成圖 盪 鞦 韆1 180° servomotor 程式範例 模型操作影片 9 A A 7 8 ×38











1 2 3 組裝完成 實驗完成 創作完成 自我評量 18 玩實驗動手 玩創意動手輪比),作出不同擺幅的盪鞦韆。試試看,將鏈輪改成齒輪或皮帶輪,同時試著改變速比(齒做做看,改變程式碼的等待時間,觀察盪鞦韆的作動。 Smart網頁版Manual
19 想想看 第一類桿桿 施力臂 施力點 支點抗力點 抗力臂生活應用 玩蹺蹺板時,面對比自己重的人,怎麼做才能把對方抬起來? 蹺 蹺 板 應用科學 槓桿原理2 的膠質地上,或增設彈簧讓蹺蹺板的兩端都不會落地。踏地或沒踏地板,而導致瞬間下墜受傷的風險,所以蹺蹺板通常會安裝在柔軟整來達到平衡。雖然蹺蹺板都有扶手讓玩家抓住,但依然存在兒童突然用力體重的人一起玩時,可以經由座位前後的調由於蹺蹺板內含槓桿原理的特性,所以不同撐起,如此上下起伏獲取樂趣。戲。兩端的人可以輪流用腳踩踏地板將自己來支撐,是種一邊升起另一邊就會下降的遊分別坐在長木板的兩端,木板正中央以輪軸在遊樂設施的設定中,蹺蹺板是由兩個人蹺蹺板其實就是槓桿原理的體現。槓桿是簡單機械的一種,運用支點、施力點與抗力點之間的關係來讓物品保持平衡或者舉起重物。槓桿分三類,蹺蹺板屬於第一類槓桿,支點在中間,施力點與抗力點在兩邊,可能省力也可能費力,主要由力臂長短決定。而本課是利用馬達的間歇式旋轉,來製造蹺蹺板上下起伏的現象。

20 零件清單 3 2 1 x2 1 x2 2 x5 3 x2 8 x3 20 x2 23 x2 29 x3 31 x1 32 x1 34 x1 38 x1 50 x1 62 x1 63 x1 64 x1 65 x1 66 x1 67 x1 68 x1 73 x1 77 x1 79






















21 蹺 蹺 板2 程式範例 A 完成圖 A 模型操作影片 4








1 2 3 組裝完成 實驗完成 創作完成 自我評量 22 玩實驗動手 玩創意動手 試試看,改變模型為蹺蹺板做出周邊裝飾及安全機構。會停。做做看,改變程式碼讓蹺蹺板一直搖晃下去,不按空白鍵就不 Smart網頁版Manual
23 想想看 生活應用 除了升降台之外,還有哪些機械可以做到垂直升降? 升 降 台3 液壓驅動,故又稱液壓升降台。為了抬升重物同時節省能量消耗,升降台一般採用機構等。作業,如建築業、碼頭和具有挑高建築的飯店及公司降的特性,已經廣泛應用在高空設備的安裝與維修不同高度的貨物輸送之外,升降台方便移動自由升能自主移動、進行高空作業、原地旋轉等優點。除了開始具備輕量化、自體支撐、操作簡單、作業面積大、操作與移動。後來經過不同使用者的改良,升降台的升降台只能透過人力、水力、動物力的方式來進行升降台的出現源自於人們對垂直輸送的需求,最初可以將人或貨物垂直運送的起重機械。升降台常見於工廠、倉庫及物流中心等地方,是一種科學應用液壓液壓驅動是透過流體力學原理增加機械力量的機制,通過裝置將液體保留在管道內當作傳動的工作介質。過程中,會將動能轉換成液體的壓力能,經過液壓控制與調節裝置,輸出成好幾倍於動能的機械能,可應用於液壓鉗、液壓泵及各種重型機械設備之中。另外,液壓的液體通常不使用純水當成介質,因為液壓視情況須滿足抗氧化、潤滑、防鏽、防腐蝕、抗泡沫、減震等特性。


24 x6 1 x6 2 x11 3 x1 11 x2 17 x1 18 x1 19 x2 21 x4 22 x1 26 x6 27 x1 30 x2 31 x2 34 x1 35 x2 39 x2 41 x1 42 x1 50 x1 73 x1 77 x1 79 零件清單 3 4 12



















25 升 降 台3 程式範例 A 完成圖 模型操作影片 A 100mm 5 6 1 1 2 2 3








1 2 3 組裝完成 實驗完成 創作完成 自我評量 26 玩實驗動手 玩創意動手 式升降台。試試看,改變機構試著將升降台變成可以前後走動的移動影響升降台。做做看,調整馬達位置替換不同的齒輪,觀察齒輪大小會如何 Smart網頁版Manual
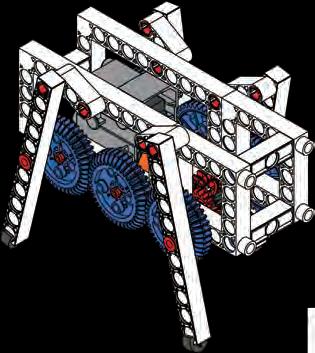
27 想想看 生活應用 你還看過哪些連桿機構? 步行機器人 應用科學 連桿4 動性,如今市面上已然可以看到相關的產品出現。現在步行機器人的設計更往機器寵物商品化發展,性能著重在與人的互動而非機踹或踢都不會倒,連在濕滑、陡峭的路面上都能快速行走。接受到各種訊號之後再由身上的微型電腦控制機械狗做出運動及反應,不僅被人上快速穿梭運送物資。它的身上有各種感測器、雷射迴轉儀和一套立體視覺系統,戰,它的乘載重量達154公斤,可以在戰場機械車輛無法行駛的粗糙地形配合士兵作最初的設計理念是為了應用於戰場,讓它在用四條連桿機械腿來進行移動。足動力平衡機器人,沒有車輪、沒有履帶,採司合力研發出「波士頓機械狗」,它是一隻四研發重點。美國國防部與波士頓動力工程公步進式機器人在現今,已是各個科技大國的連桿是槓桿的進階應用之一,主要由多根桿子組成,桿子與桿子間透過活動式的點連接,讓他們可以一起運動同時限制彼此的運動範圍。汽車的雨刷及方向盤轉動輪胎都是連桿互相帶動的例子。而本課程結合齒輪及凸輪連結鍵的應用,讓二側的連桿可以同步運行,做出類似動物前後腳分開,協同步行前進的感覺。


28 x8 1 x8 3 x4 4 x4 5 x4 17 x4 19 x4 27 x2 31 x2 32 x1 35 x1 37 x4 41 x6 43 x2 42 x1 50 x1 73 x1 77 x1 79 8 零件清單 65mm5 7 3 4 6 12 ×4



















29 步行機器人4 程式範例 A A 模型操作影片 完成圖 孔洞B 孔洞B 孔洞B 孔洞B 9 10









1 2 3 組裝完成 實驗完成 創作完成 自我評量 30 玩實驗動手 玩創意動手試試看,用程式碼寫出步行機器人前後猶豫的走動方式。裝方式對作動會有何影響。做做看,改變齒輪與長條孔位的連接位置,觀察不同的組 Smart網頁版Manual
回顧模型 31 3.升降台1.盪鞦韆 請利用學過的模型跟原理,設計出一組由連桿驅動的雨刷。4.步行機器人2.蹺蹺板 專題製作15




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 32 我的作品照
33 想想看 生活應用億噸,占總量的40%。這些浮游植物也是海洋成為地球之肺的主因。魚而充滿生機。地球上有50%的氧氣是由這些浮游植物提供,捕獲的二氧化碳達370鯨魚的排泄物也剛好提供浮游植物所缺少的養分,讓礦物質較少的海域也能因為鯨復育哪種鯨魚對溫室氣體的減少最有幫助?現今地球上因氣候變遷,空氣中充斥著各種溫室氣體。許多國際組織透過減少濫伐森林的計畫來進行固碳,保護生態系統。而海洋生物學家發現,鯨魚能使大氣中的二氧化碳降低,尤其是大型的鯨魚。以減少溫室氣體的能力來說,一隻鯨魚平均能保存33噸的二氧化碳,而一棵樹每年只能吸收48磅的二氧化碳,落差之大顯而易見。鯨魚的存在大大提升碳捕獲量,因為只要有鯨魚的地方就有浮游植物,而鯨魚的遷移與垂直運動可以將礦物質從深海帶到海面接觸陽光,讓浮游植物可以大量的繁殖。 鯨魚 應用科學 往復運動6 以同樣的方式重複不停地來回運動。的整體位移為零,在不改變限制及圓周運動的範圍下,往復運動只會動旋轉,可以做到互相牽制又一起運動的效果。往復運動回擺動,透過支點或限制點讓連桿不會隨圓周運過連桿將馬達的旋轉運動改變成直線的來往復運動有很多種,一般常見的方式是透


34 x8 1 x3 3 x1 4 x1 5 x6 7 x8 14 x2 15 x1 17 x1 19 x1 20 x2 24 x2 31 x1 36 x2 32 x1 42 x1 43 x1 50 x2 61 8 孔洞B 零件清單 2-6 35mm 5 6 7 3 4 2 1 ×2 x1 71 x1 73 x1 77 x1 79 9


























35 鯨魚6 程式範例 A A 2-5 2-7 2-8 完成圖 10 11 12 模型操作影片





1 2 3 組裝完成 實驗完成 創作完成 自我評量 36 玩實驗動手 玩創意動手 試試看,改變結構讓魚鰭也變成活動式的。做做看,修改程式碼讓鯨魚的尾巴產生間歇性的運動方式。 Smart網頁版Manual
37 想想看 生活應用 鳥類可以在天上飛行,除了擁有翅膀之外還需要具備哪些條件? 飛鳥7 因此,鳥類飛行的複雜性遠遠地超出人們的想像。移動狀態的樹枝上,這是人類科技目前無法做到的。」他們能夠在短短幾秒鐘內將速度從零加速到每小時64公里,或者降落在處於變成飛機,也就是人類的天下。但是:「鳥類可以做出一些令人感到驚奇的事情。為人所知。而鳥兒能夠飛行一直是眾多科學家想解開的秘密。雖然,天空已經義為恐龍的後代。最早的鳥類生存於侏儸紀時代,其中以德國發現的始祖鳥最出來的分支,甚至有科學家直接將鳥類定依據考古的化石紀錄,鳥類是恐龍所演化南極洲的內陸都有鳥類的棲息地。的地方幾乎都可以發現鳥類的蹤影,包含的特性不會受到海洋的阻擋,只要有陸地鳥類是分布最廣的物種,因為牠可以飛行科學應用鳥類翅膀鳥類能夠飛行的第一要素就是擁有翅膀!翅膀的構成要件複雜,骨骼結構輕且自帶浮力,表層又生長輕巧羽毛。接著,就是翱翔天際的重要關鍵——空氣力學的運用,飛行時減少空氣阻力,振翅時運用反作用力,部分鳥類翅膀還有除震動消噪音的功能。鳥類有很高的適應力,能翱翔於複雜的氣流、寒冷及低壓缺氧的環境。而關於鳥類翱翔的祕密,科學家至今還無法完整解釋。


38 x12 1 x4 3 x1 4 x2 5 x4 7 x2 9 x1 16 x2 18 x1 19 x2 20 x4 22 x1 23 x1 24 x3 27 x1 31 x1 35 x1 36 x2 42 x2 43 x1 60 x1 57 x2 61 x1 73 x1 77 x1 79 零件清單 2 1 ×2 孔洞A對稱讓兩齒輪嚙合插入孔洞A x1 71






























39 飛鳥7 模型操作影片 程式範例 A 6 7 8 3-1 3-33-2 完成圖





1 2 3 組裝完成 實驗完成 創作完成 自我評量 40 玩實驗動手 玩創意動手感覺在空中飛行。試試看,用剩下的積木或手邊的物品將飛鳥架高,讓飛鳥做做看,修改程式讓翅膀拍動完可以發出叫聲。 Smart網頁版Manual
41 想想看 生活應用 生活中還有哪些地方可以觀察到白努利定律呢? 飛機 應用科學 機翼8 的效率。螺旋槳飛機一般速度較慢,載重較小,但是設計優異的螺旋槳甚至能到達80%讓飛機獲得向上的升力;而螺旋槳將空氣向後抽,則獲得飛機向前的拉力。白努利定律及牛頓第三運動定律,葉片的設計使得葉片上下的空氣產生壓力差,螺旋槳飛機之所以能夠飛行主要是因為程。對於飛行高度要求較低及速度較慢的航程航行上它依然占有重要的地位,特別是旋槳飛機。現今雖然多了噴射機,但在短在二次大戰以前幾乎所有的飛機都是螺提供動力。發動機以渦輪螺旋或往復機構的方式來螺旋槳飛機是固定機翼飛機的一種,透過機翼產生的升力原理主要是因為白努利定律,透過機翼厚薄及形狀的控制,迫使機翼上下氣壓因流速不同所產生的壓力差來控制。當氣流路徑較長、速度變快,壓力就會變小;反之,氣流路徑較短、速度較慢,壓力就會較大。只要讓機翼上方的壓力變小,就可以讓機翼產生上升的升力。除了造型之外,機翼的角度也是影響壓力差的主要控制因素之一。


42 2-1 2-3 1-4 2-4 5 7 4 6 3 2 1 21 20 x8 1 x2 2 x2 4 x2 5 x6 7 x4 14 x4 17 x1 20 x2 21 x2 22 x2 23 x2 24 x4 31 x2 32 x2 33 x1 35 x3 38 x1 41 x4 43 x2 49 x2 48 x2 50 x2 53 x1 73 x1 77 x1 79 x1 71 ×2 2-2 1-6零件清單孔洞B

































43 飛機8 程式範例 A 11 模型操作影片 A 8 9 10×2 ×2橡皮筋-上視圖橡皮筋 完成圖








1 2 3 組裝完成 實驗完成 創作完成 自我評量 44 玩實驗動手 玩創意動手 讓飛機可以實際前後移動。試試看,改變機構做出在螺旋槳轉動時輪子也能同步轉動,旋槳的旋轉方向。做做看,在不改變程式的狀況下,利用機構的設計改變兩側螺 Smart網頁版Manual
45 想想看 生活應用 為什麼救難飛機都是由直升機來執行任務呢? 直 升 機9 本課模型使用IR感應器偵測距離,讓直升機可以上下飛行。較慢的缺點。難也都是由直升機來擔任救援任務。不過,直升機也有耗油量較高、航程較短、速度這些特性讓直升機可以出現在各種地形,如都會區、叢林、海邊等,而且一般的山難水了人們對飛行想像的能力,可以垂直升降、懸停、小速度向前或向後飛行的特點。探索期。雖比固定翼飛機慢了30年才問世,卻具備隨著工業革命及人類的進步發展,直升機才進入了飛行高度曾高達27公尺。歐洲之後,英國人利用鐘錶發條來驅動竹蜻蜓旋轉,國晉朝,類似於竹蜻蜓的動力機械。在竹蜻蜓傳入直升機的飛行概念遠早於飛機,最早可以追溯到中行器。的鋼鐵人、阿拉伯人的飛毯都是可以垂直起落的飛著陸,既能自由移動又能盤旋空中,例如:超級英雄人類對於飛行的夢想就是原地騰空升起,隨意定點科學應用紅外線感測紅外線感測是主要是利用紅外線在傳播時,不會擴散且折射率小的原理。因為紅外線傳遞需要時間,當紅外線從感測器發出碰到物體再反射回來讓感測器接收到,藉此根據紅外線發出與接收的時間差,就可以換算出感應器與物體之間的距離。如今在環境工程、醫學及軍用領域,紅外線感測都被廣泛的應用。


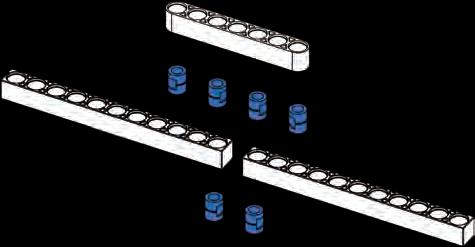
46 x23 1 x6 2 x1 3 x2 7 x2 10 x1 11 x2 12 x4 14 x2 15 x2 16 x1 17 x2 18 x3 20 x6 21 x2 23 x1 24 x4 27 x1 29 x1 30 x2 32 x4 31 x2 34 x1 35 x3 42 x2 36 x1 43 x1 55 x1 56 x1 71 x1 73 x1 75 x2 77 x1 79 21 2 3 4 5 零件清單 20






















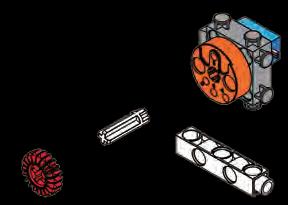
47 6 7 8 9 10 ×2 20 20 21 直 升 機9





48 11 1 11 12 13 14 15 21 2 1





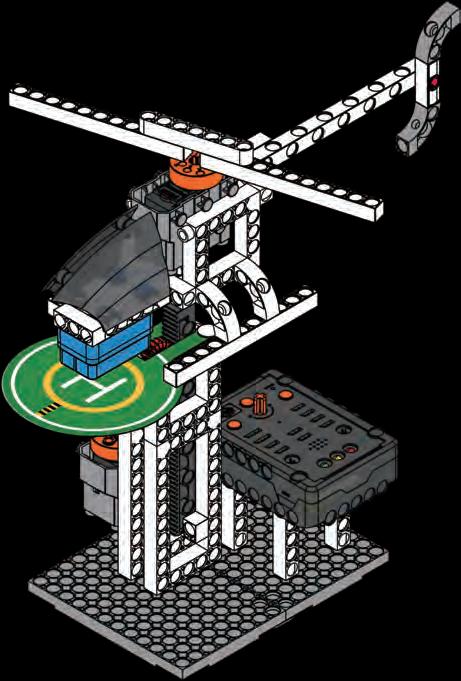
49 直 升 機9 模型操作影片 程式範例 B A A B 完成圖 16 A









1 2 3 組裝完成 實驗完成 創作完成 自我評量 50 玩實驗動手 玩創意動手試試看,改變造型作出尾翼也能旋轉的直升機。會自動停在停機坪上並停止運作。做做看,利用程式碼寫出,當某個按鍵按下之後,直升機 Smart網頁版Manual
回顧模型 51 8.飛機6.鯨魚 9.直升機7.飛鳥 請利用學過的模型跟原理,設計出一艘潛水艇。 專題製作210




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 52 我的作品照
53 想想看 生活應用 螢火蟲為什麼要發光呢? 螢 火 蟲 應用科學 光源感應器11 能生存,如果這個地方遭受汙染,螢火蟲就會無法生存。通常,螢火蟲也被視為生態環境優劣的指標生物,牠在沒有受到汙染的環境才能在夜晚發光求偶,發光期只有短短3至7天,長壽的螢火蟲則存活將近20天。螢火蟲屬於完全變態的昆蟲類型,依序經歷卵、幼蟲、蛹、成蟲四階段,成蟲才時只在晚上發光,若是白天遭受打擾,也會發出警示光亮。物別靠近的意味,因為某些螢火蟲對蝙蝠等特定生物而言,是有毒性的;牠們平蟲。螢火蟲發光除了求偶,更有警告其他生少數種類的螢火母蟲則用來捕食同類公螢火蟲發光是為了求偶吸引同類注意力;目前世上已發現兩千多種螢火蟲,大多數種會發光的甲蟲,發光器官在尾部。想到螢火蟲。屬於鞘翅目的螢火蟲,是一提到會發光的昆蟲,大家第一時間絕對會光源感應器主要是透過光敏電阻來感應光線的強弱。光敏電阻是一種特殊電阻,利用光電導效應來激發裡面的電子。電阻原本處於穩定狀態,受到光線照射後會激發成自由電子,當光線越強,產生的自由電子也越多,電阻的數值就會變小,經由電阻的改變就能推算出光線的強弱。


54 5 3 4 2 1 x28 1 x4 2 x4 5 x2 6 x1 9 x1 11 x8 14 x6 15 x1 17 x2 18 x3 19 x1 22 x3 25 x1 24 x2 26 x4 28 x3 31 x2 32 x1 35 x2 36 x3 42 x2 43 x2 56 x2 61 x2 55 x1 73 x1 74 x1 76 x1 79 A x3 16 x2 20 x2 21 A x1 82 x1 83 ×2 孔洞A請讓齒輪嚙合,請朝前,朝同一個方向。 零件清單 35mm



























55 螢 火 蟲11 6 7 8 9




56 10 11 12 13 1 2 OK






57 螢 火 蟲11 模型操作影片 程式範例 180° servomotor 完成圖 14 請插入孔洞B C齒輪嚙合如圖。與孔洞C,B








1 2 3 組裝完成 實驗完成 創作完成 自我評量 58 玩實驗動手 玩創意動手試試看,利用剩下的馬達讓螢火蟲的觸角動起來。做做看,增加程式碼讓螢火蟲有不同的發光方式。 Smart網頁版Manual
59 想想看 生活應用例如亞馬遜、蘋果、惠普等公司。工作室等,有些企業的創立的初期也都是從車庫開始,即所謂的「車庫創業」,除了停放車輛,車庫對於不同的人來說還有各種功能,可作為倉庫、樂團團練室、寬更高,甚至沒有門,連車庫本身都是直接以棚子或帆布的方式搭建。庫門可以用電動或手動的方式啟動,為了方便車輛進出,車庫門一定會比車子更如果你有屬於自己的車庫,你認為還能如何使用它?車庫是指用於停放車輛的小型建物,至少可以容納一台車子,大部分的車庫都有遮風避雨的功能。依國家民情不同,車庫也有許多不同的種類,有些依房而建,甚至直接把房子的入口處當車庫使用;有些則獨棟建造不與建築物相連。車 應用科學 車庫搖滾上掀式車庫門12 卻更顯純粹。多的加工及修飾,主要訴求激情與活力的展現,樂曲感覺簡單粗糙,1967年間車庫搖滾開始風靡美國和加拿大,它代表一種創作,沒有太許多電影也都還會出現在車庫團練的畫面。1963年至庫碰巧成為讓他們大吼大叫盡情宣洩的地方,樂團沒有良好的室內隔音場地可以練習,車車庫搖滾是早期搖滾樂的流派之一,早期


60 x10 1 x5 2 x7 3 x4 7 x2 10 x2 11 x2 13 x2 14 x2 19 x2 20 x4 24 x1 26 x3 27 x2 32 x2 33 x2 34 x1 36 x1 42 x1 50 x1 73 x1 77 x1 71 x1 79 零件清單 1












61 上掀式車庫門12 4 5 6 吊掛在這裡




62 10 11 35mm




完成圖 63 上掀式車庫門12 A 模型操作影片 程式範例 A 12




1 2 3 組裝完成 實驗完成 創作完成 自我評量 64 玩實驗動手 玩創意動手試試看,改變機構讓電動門可以垂直升降。做做看,改變程式內容做出可以聲控的電動車庫門。 Smart網頁版Manual
65 想想看 生活應用 生活中還有哪些地方會運用到類似的感應器? 13 門的狀態是否被觸發,觸發之後,由電動機透過皮帶或各式連桿來控制自動門。現代的自動門通常具備三個重要元素:門、感應器、電動機。感應器負責偵測開再將門關閉。整個過程不需人為參與,完全由機器自動控制,故稱之為自動門。件便會透過驅動系統將門開啟,在該物件離開識別的範圍或經過一段時間之後觸發某個按鈕的動作時,識別該動作的控制元自動門的定義是指:當人或物體發生接近門或公司等新建大樓的正門。年發明後,逐漸被廣泛應用在超級市場、百貨明了自動門。自動門是門的延伸概念,在1930科技發展為滿足人類對門的使用需求,因而發 自 動 門 應用科學 感應器 感應等。其中,紅外線感應式自動門是目前使用比例最高的。自動門的感應器有許多種,如:紅外線、雷達波、超音波、微波、體溫運作,傳動皮帶或各式連桿機構來控制自動門扇開關。而號給自動門的控制器,再經由控制器來啟動馬達檢測人員或物體是否通過。感測後傳送信自動門通常是利用各式各樣的感應器,來


66 3 x22 1 x5 2 x1 4 x8 7 x2 9 x2 10 x3 11 x1 12 x2 13 x2 14 x1 16 x1 17 x2 18 x1 20 x6 21 x4 22 x2 23 x1 24 x4 25 x3 27 x1 30 x1 29 x3 31 x2 33 x2 32 x2 34 x1 37 x2 42 x1 50 x1 62 x1 63 x1 64 x1 65 x1 66 x1 67 x1 68 x1 73 x1 75 x1 77 x1 79 x1 71 20 22 零件清單





























6-3 6-1 67 13 自 動 門 5 7 6 4 21



68 10 ×2 21 6-4 6-2





69 13 自 動 門 完成圖 模型操作影片 程式範例 A 12










1 2 3 組裝完成 實驗完成 創作完成 自我評量 70 玩實驗動手 玩創意動手 試試看,改變機構讓自動門有不同的開關方式。啟動。做做看,改變程式讓非感應開關時,需要不同的密碼才能 Smart網頁版Manual
71 想想看 生活應用 為什麼古代的時鐘幾乎都是木頭做的? 14 咕鐘,但仍舊保留了外觀精美的木製藝術雕刻。現今,改良的布穀鳥鐘以電子裝置取代精巧機械設計,用蜂鳴器發出聲響,被稱之為石英咕松果上鉉,時鐘便可持續運作。始運轉,松果慢慢隨著時間下降,為時鐘帶來動力。上鉉後,鐘能運轉一天或八天,只要再將成。用鏈條將松果拉到最高點(上鉉),時鐘開配鏈條當作動力來源,經過精密計算設置而響……都是使用鐘下懸掛的金屬造型松果搭針的轉動、布穀鳥進出移動、鳥叫聲與音樂聲傳統的布穀鳥鐘以機械原理使其運轉,鐘面響,人們便會知道時間,因而也被稱為咕咕鐘。聲、兩點鐘叫兩聲……直至十二點鐘的十二聲每半點發出一聲聲響,整點則是一點鐘叫一門自動開啟,布穀鳥跑出來發出「咕咕」聲響,造型裡設計一隻布穀鳥,在半點和整點時,木布穀鳥鐘發源自德國黑森林地區,鐘的小木屋 咕 咕 鐘 應用科學 蜂鳴器 聲的器件。計算機、電子玩具、電子設備、計時器及相機等電子產品之中,做為發振動膜片週期性地振動發聲。廣泛應用在影印機、警報器、號會經過電磁線圈,使電磁線圈產生磁場,造成採用直流電壓供電,接通訊號之後,音訊信蜂鳴器是一種一體化結構的電子訊響器,


6 7 8 9 72 20 3 2 4 5 1 x31 1 x4 2 x2 3 x1 4 x2 6 x8 7 x2 10 x1 16 x4 18 x2 19 x3 20 x4 21 x3 22 x2 23 x4 24 x1 26 x2 27 x4 28 x1 30 x4 31 x2 32 x2 34 x2 33 x1 35 x3 36 x4 42 x2 39 x2 43 x1 44 x2 48 x2 49 x3 50 x2 53 x1 57 x1 58 x2 59 x2 60 x2 61 x1 73 x1 76 x1 77 x1 79 x1 71 零件清單 35mm































10 11 12 13 14 15 16 17 18 4-5 4-4 73 咕 咕 鐘14 100mm 100mm 35mm 35mm









19 20 21 22 23 24 25 20 21 20 74 4-1 4-3 4-2 1 2 21 21 21









程式範例 A 180° servomotor A 180° servomotor 26 27 完成圖 75 咕 咕 鐘14 模型操作影片











Smart網頁版Manual 1 2 3 組裝完成 實驗完成 創作完成 自我評量 76 玩實驗動手 玩創意動手 作動。試試看,加入IR感應器,在感應到東西時觸發咕咕鐘回去。做做看,改變程式碼,讓小鳥的作動變成慢慢地出來快速的
回顧模型 77 13.自動門11.螢火蟲 源感應器)的伐木工。請利用學過的模型跟原理,設計出一個日出而作,日落而息(光12.上掀式車庫門14.咕咕鐘 專題製作315




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 78 我的作品照
79 想想看 生活應用 化呢?鐵路高架化可以改善交通問題,那為什麼不要把所有鐵路都高架 16的時間造成回堵,大部分的都市都開始往鐵路高架化的方向發展。護安全,並不影響交通流暢度。而現代的都會區因為車流量大,為減少因等待平交道早期,行經鐵路的車輛都是畜力車,當時車流量也較少,因此採用設立真正的障礙維其他會在馬路上行走的物體,避免它們闖入平交道。自從火車問世後,為人類的交通運輸帶來革命性的變化。而原本人畜都可行走的路地上,多了這麼一個高速行駛的鐵怪物,必須要有些法子來避免意外。因此,平交道就這麼誕生,一開始的平交道是有人在看守的,且以揮紅旗和亮紅燈來指示後方人員停止,待火車通過後才讓放行的。後來,引入了手動或電子的欄杆往自動化發展。欄杆的主要作用在於,當火車經過時用來擋住行人、車輛或科學應用平交道安全 鐵路平交道
況時,應撞斷遮斷桿逃生。按下按鈕警告列車減速停車。若不幸發生車輛被柵欄攔在中間的情有加裝緊急按鈕,在車輛卡在平交道無法移開時,需盡快下之後,仍有人車在平交道內時發出警告聲響;並交道會加裝遮斷機及偵測器,在遮斷桿放為了防止行人及車輛闖越平交道,部分平


80 1 x28 1 x4 2 x2 3 x1 4 x4 7 x8 14 x2 15 x6 17 x1 16 x2 18 x4 19 x1 20 x4 22 x2 23 x1 29 x2 24 x4 31 x2 32 x2 34 x1 37 x3 38 x1 42 x8 43 x1 73 x1 71 x1 75 x1 76 x1 79 5 零件清單 5-2




















81 16 鐵路平交道5-5 5-4 6 7 8 9 10 11 12 13 ×2








82 5-3 14 15 16 17 18 19 21 20 ×2 ×2 70mm 70mm








83 16 鐵路平交道 模型操作影片 程式範例 180° servomotor 22 23 完成圖 70mm65mm










1 2 3 組裝完成 實驗完成 創作完成 自我評量 84 玩實驗動手 玩創意動手試試看,為你的火車做出高架化的鐵路。做做看,修改程式碼改變柵欄放下及抬起的速度。 Smart網頁版Manual
85 想想看 生活應用 日常生活中還有哪些地方可以看到自走車? 17 變化,將資訊傳回控制晶片之後,判斷此等外在環境該如何應對。自走車要能夠自行操作,主要還得透過加裝在車上的感測器來辨識外在的環境紅外線、雷射導引或GPS等方式來導航。面鋪設軌道等固定路線來讓自走車行走;二、非接觸式,又稱無軌式,必須經由角色。自走車的控制方式大致可分成兩類:一、接觸式,又稱有軌式,主要是在地的產線上,自走車更是扮演了相當重要的如今在熄燈工廠、無人倉庫等要求自動化達成指定的任務。車子可以自行運作,做出特定的動作甚至跡車等自走車都是透過程式控制的方式讓動化的趨勢。而車輛亦是如此,避障車、循的世界裡,很多產品的生產也都走向了自如今在這個凡事都要講究資訊化、大數據 智慧避障車 應用科學 距離偵測 壁了。的偵測器就會依據距離發出警報,讓駕駛人能夠得知車子快要撞到牆聲,就是運用智慧避障車的原理,當車子倒車快要貼近牆壁時,裏頭來推算出距離長度的。而現在車子在倒車時會有逼逼的叫接收二極體來測量紅外線的光源強度,產生電壓訊號外線照射到物體時就會反射回來,讓感測器極體,產生出來具有方向性的紅外線。當紅紅外線距離感測器,是運用紅外線發光二


86 零件清單 x10 1 x2 2 x2 17 x2 20 x2 22 x3 31 x1 27 x1 32 x2 36 x2 50 x2 52 x1 75 x1 73 x1 76 x2 77 x1 78 x1 79 x4 3 x1 82 x1 83 3 4 2 1 35mm35mm 1 2 OK























A B 180° servomotor 180° servomotor B A 程式範例 87 17 智慧避障車 模型操作影片 完成圖 5










1 2 3 組裝完成 實驗完成 創作完成 自我評量 88 玩實驗動手 玩創意動手 車子。試試看,修改程式碼讓避障車變成有一台擁有倒車雷達的向走。做做看,利用避障車的特性放置障礙物,讓車子往你設定的方 Smart網頁版Manual
同,更方便於實戰的應用。狀多為子彈型,由於重心的改變,實際的彈道軌跡會與拋物線略有不兩條曲線,不過前提是該物體是圓形的。而現代的砲彈形拋物線從至高點劃分的話,可以剛好切出鏡像的面時,該物體在空中所經過的曲線。一般的拋物線是指將物體拋擲出去,直至落在地
89 想想看 生活應用 為什麼炮台及箭塔在設置時都會選擇在高處建立? 18 等靠近。自海上或空曠地區的攻擊,因此,射擊砲台周遭也被視為軍事重地,不准閒雜人作為防禦工事的射擊炮塔也時常蓋在高處或沿海地區等戰略要點,用以防禦來通要口,同時也可能是駐軍屯防的重地。裝備大口徑的遠射程火炮用來守護該地區的安全。一般會與城鎮相鄰或鄰近交來發射砲彈,是堅固且重要的戰略要地,主要在發明了火藥和大砲之後,射擊砲塔被使用礎建築。體,這些高塔也是日後變成營寨和城堡的基程攻擊同時掩護士兵們不被攻擊所建造的掩塔樓。這些木製的高塔,是為了要方便進行遠下的方式,而射擊炮塔的前身就是箭塔或稱早期進行遠距離攻擊時,往往得透過居高臨 射擊炮塔 應用科學 拋物線


90 x38 1 x1 2 x2 3 x2 12 x2 14 x2 16 x1 17 x3 18 x3 20 x2 21 x4 22 x2 23 x4 24 x4 27 x2 29 x4 31 x2 32 x2 33 x1 35 x1 43 x4 42 x1 36 x3 38 x1 44 x1 45 x1 53 x1 69 x1 73 x1 76 x2 77 x1 79 x2 6 x1 82 x1 83 20 21 零件清單 3 5 4 12 70mm


































91 18 20 射擊炮塔 7 8 9 10 11 12 6 35mm






92 14 15 16 17 18 19 20 20 1 2 OK 13 ×2











93 18 A B 180° servomotor A B 180° servomotor 程式範例 完成圖 21 22 23 24 射擊炮塔 模型操作影片 2 1 橡皮筋 70mm 70mm












1 2 3 組裝完成 實驗完成 創作完成 自我評量 94 玩實驗動手 玩創意動手皮筋的彈力並觀察結果如何。試試看,改變模型為B馬達加入齒輪比減速,同時增加橡做做看,觀察射擊炮塔在哪種狀況下可以將球射得最遠。 Smart網頁版Manual
95 想想看 生活應用 機械手臂還能運用在哪些行業? 應用科學 太空探索19 題,透過機器間的相互溝通才能成就熄燈工廠與無人倉庫的高效率工業成果。以做到各種運動與位移,不同的手臂之間還能進行溝通協作,自動排除各種問機械手臂由主體架構及馬達,搭配各種傳感器組成,經過程式的控制之後,它可也都用機械手臂來進行太空艙外的工作。出現的各種問題。甚至連在外太空,多數機器不會累也不會抱怨,更沒有員工可能責那些枯燥乏味、過於單調的工作,因為它們通常負責較為危險的工作,有時也負業中,如汽車工廠;都會看到它們的身影。廣泛運用的機器人。尤其在較為粗重的產的機器人,是目前世界上數量最多也最為機械手臂泛指以人類手臂為雛形而打造 機械手臂 測器的探索過程中,更是不可或缺的重要角色。由無人駕駛的機器人探測器進行。而機器手臂在太空環境及無人探行探索,而太空的物理探勘,需要太空人實際搭乘太空船進行,或經索是指人們透過物理的方式親身經歷或親眼所見來進世界有更多的認識,太空探索開始興起。太空探用天文望遠鏡的觀測成果。為了對地球外的人們對於宇宙的了解大多都來自於科學家


96 x37 1 x9 2 x11 3 x2 6 x2 10 x3 11 x3 12 x4 15 x3 16 x3 17 x3 18 x4 19 x4 20 x2 21 x4 22 x2 23 x3 24 x1 25 x6 27 x6 28 x4 31 x2 32 x1 37 x2 36 x2 33 x2 34 x3 38 x1 39 x4 42 x1 43 x1 44 x1 45 x2 48 x3 50 x1 51 x1 52 x1 55 x1 56 x1 73 x1 76 x2 77 x1 79 x1 82 x1 83 21 零件清單 3 4 12 5 70mm














97 19 21 20 機械手臂 7 8 6 齒輪嚙合且組裝在相同的高度 70mm




98 100mm 70mm 10 9 齒輪嚙合位置請朝箭頭方向調整




99 19 機械手臂 65mm 11 13 12 紅色小齒輪請靠右如圖。軸請置中組裝,




100 15 14


101101 20 機械手臂19 35mm 16 17 18 19





102102 20 21 22 20 20




103 A B 180° servomotor 180° servomotor 程式範例 完成圖 23 機械手臂19 模型操作影片 1 2 OK












1 2 3 組裝完成 實驗完成 創作完成 自我評量 104 玩實驗動手 玩創意動手 線來控制手臂的夾取。試試看,修改模型替機械手臂加入感應器,利用距離或光做做看,利用機械手臂將積木從機械手臂的左邊運送到右邊。 Smart網頁版Manual
回顧模型 105105 16.鐵路平交道18.射擊炮塔 才啟動的砸派機。請利用學過的模型跟原理,設計出一個可以感應到有東西靠近17.智慧避障車19.機械手臂 專題製作420




2 模型創作 1 模型設計 自我評量 3 競賽獲勝 設計規劃 106 我的作品照
