
2 minute read
Schnittmuster


Das Schnittmuster wurde so erstellt, dass möglichst wenig Schweissnähte benötigt werden, des Weiteren sind die Schweissnähte so ausgelegt, dass sie als optisches Element zur Formgebung beitragen (Seiten) und unten eine Befestigungsmöglichkeit für Elektronik und Gewichte zur Austarierung sowie vielleicht zusätzliche Flossen bieten. Das Schnittmuster wurde mithilfe eines 3D Drucks mit der Skalierung 1:15 erstellt. Bevor ich das Schnittmuster an die Sarna Plastec AG weitergeleitet habe, wurde die Form mithilfe eines Stoffmodells überprüft.
Flossen

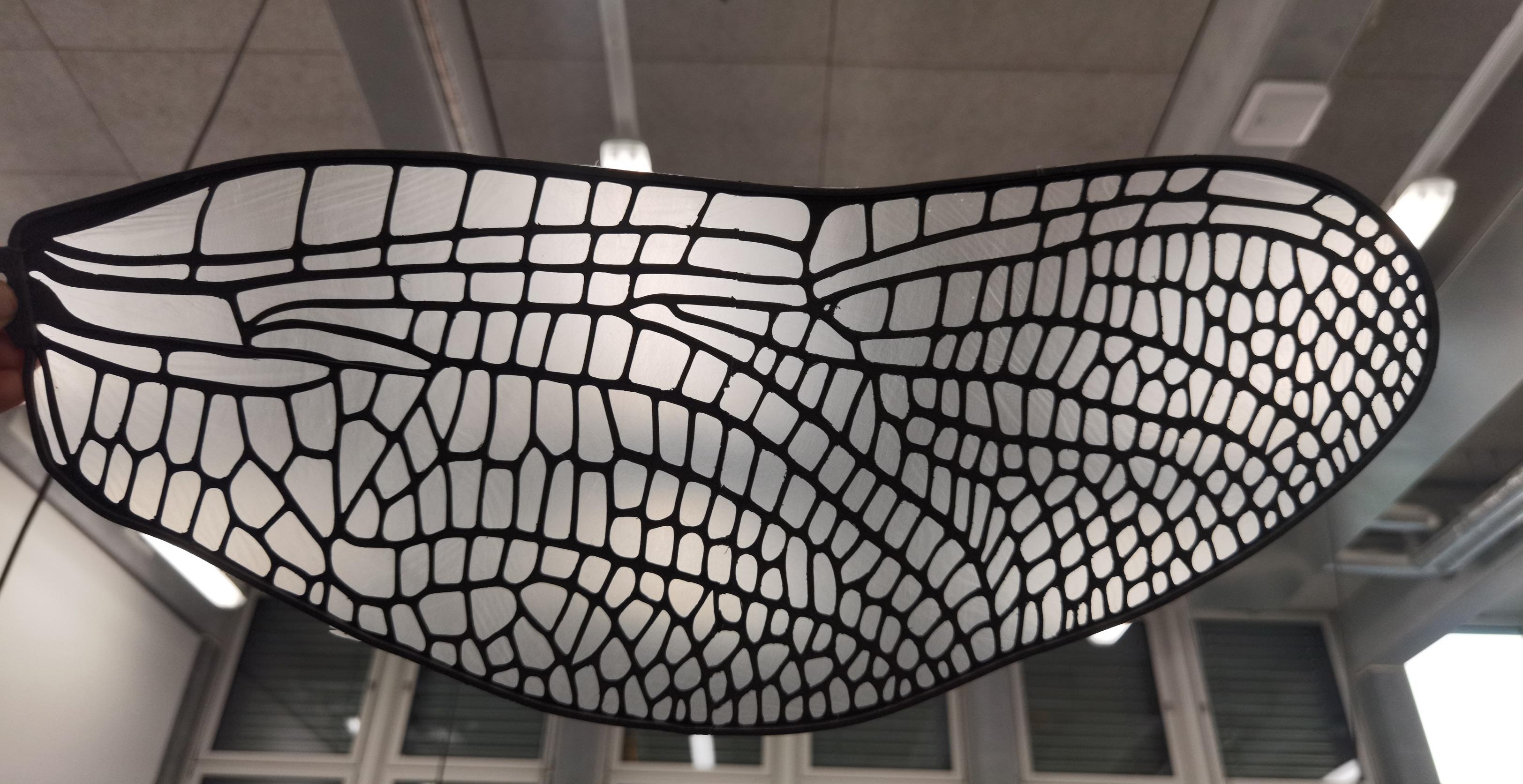
Die Flossen mussten steif genug sein, um eine akkurate Lenkung zu ermöglichen, zugleich sollten sie so leicht wie möglich sein und ein Gesamtgewicht von 50 g nicht überschreiten. Um eine natürliche Erscheinung zu erhalten, ist eine leichte Flexibilität erforderlich.
Dies wurde mit einer Kombination aus 3D Druck, Plastikfolie und Karbonstangen erreicht.

3D Druck zur Formgestaltung und als Rahmen für den Karbon rahmen, Material: E-Sun Lightweigt PLA (250

Schwanzflosse vs.2

Der Ansatz ist korrekt, allerdings bringt der SG90 Servo nicht genug Kraft auf, die Flosse zuverlässig zu bewegen.

Brustflosse
Dieser Ansatz hat von Anfang an gut funktioniert, das Drehgelenk nimmt das Gewicht des Flügels auf und der Servo hat keine Mühe, die Flosse zu drehen.
Stabilisisator

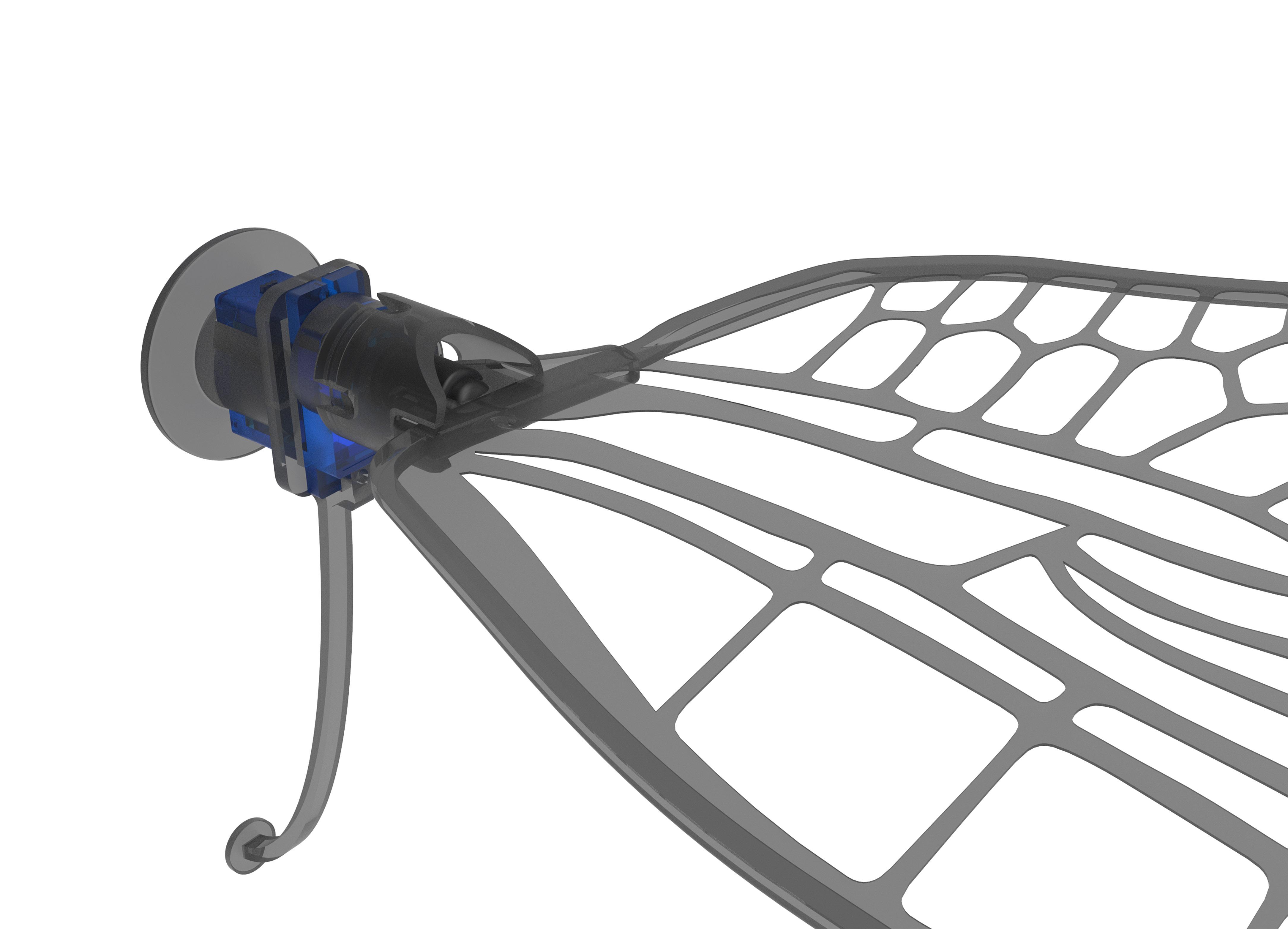
Drehgelenk zur Stabilisierung und um die Last vom Servo zu nehmen
Befestigung direkt am Ballon in einer Tasche, ermöglicht eine gewisse Flexibilität für eine natürliche Bewegung
Schwanzflosse vs.3
- Vergrösserte Hebelkraft
- unterstützung durch Feder

STEUERUNG / ELEKTRONIK
ein Vortrieb, kann sowohl durch Bewegung (Flossenschlag) als auch durch Rotoren erzeugt werden.
Zu beachten ist dabei, dass die Stabilisierung des Objekts durch Rotoren einfacher ist als durch Flossenschlag. Ziel ist eine möglichst natürliche Bewegungsästhetik. Auch sollten störende Geräusche minimiert werden. Allerdings ist Gewicht das Hauptproblem. Ich habe mich dazu entschieden, mir bei der Elektronik und Programmierung Hilfe zu holen, da ich erfahrungsgemäss dort aufgrund meiner fehlenden Kenntnisse am meisten Zeit verliere. Thomas Knüsel aus dem Media-Dock hat sich bereit erklärt, mich dabei zu unterstützen.
Sketch eines Stystems unter 10g
Nach Vorbild eines Micro Rc Flugzeugs.
Idee: durch Infrarot Distanzsensoren kann das Objekt Kollision sicher gemacht werden. Da der Auftrieb durch Helium gegeben ist, wäre braucht es nur kurze Steuerungsimpulse um das Objekt zu lenken. Dadurch kann auch eine Interaktion zwischen Objekt und Mensch entstehen, da das Objekt auf äussere Einflüsse reagiert.
Leider hat sich herausgestellt, dass die Verwendung dieser Sensoren nicht möglich ist. Die kleinen Sensoren, die ich in Spielzeug gefunden habe, sind nicht mit der restlichen Elektronik kompatibel. Kompatible Sensoren gäbe es zwar, aber diese sind zu schwer.
Verschiedene Antrieb Systeme
1: Vortrieb durch Rotor. Flossen dienen als Als Lenkruder. ?
2: Vortrieb und Lenkung durch Flossenschag ( Rückflosse) Durch eine verschiebung des Schwerpunkts erfolgt die ausrichtung nach oben oder unten. ?
3: Auftrieb und Vortrieb durch Flossenschlag ?
Die Ziele die ich zusammen mit Thomas definiert habe sind also:
- Maximale Gewichtsreduktion
- Adaptiver Reciever ( ESP NOW ) kann als Sender unf Empfänger genutzt werden und ermöglicht die Steuerung verschiedener Motoren.
- Steuerung erfolgt Manuel ( Vieleicht mittels Drucksensoren die auf der Haut angebracht werden um aunauffälliges Steuern zu ermöglichen ohne eine Fernsteuerung halten zu müssen
- Thomas beschäftigt sich mit den ESP Now Prozessoren und hilft bei der programmierung wärend ich mich um die Mechanik, Flossen und Fine-Tuning beschäftige.
Wir arbeiten mit Folgenden Komponenten.
- Arduino ESP NOW ( X2)
- Micro Servos 2 und 9g
- Micro Brushless motor
- Druck/ Bend Sensoren
- Aktuatoren
- Lipo Akku


