
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net
p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net
p-ISSN: 2395-0072
Tanmay Band1, Prerna Bharti2, Prajwal Thorat3, Akansha Chauhan4, Dr. Pradip Salve5
1Tanmay Band, Dept. of Mechanical Engineering, Ajeenkya D Y Patil University, Pune, India
2Prerna Bharti, Dept. of Computer Engineering, Ajeenkya D Y Patil University, Pune, India
3Prajwal Thorat, Dept. of Mechanical Engineering, Ajeenkya D Y Patil University, Pune, India
4Akansha Chauhan, Dept. of Computer Engineering, Ajeenkya D Y Patil University, Pune, India
5 Professor Dr. Pradip Salve, Dept. of School of Engineering, Ajeenkya D Y Patil University, Pune, India ***
Abstract - An Advanced Driver Assistance Systems (ADAS) have significantly improved road safety by integrating features like safe distance monitoring, emergency braking, lane detection, pedestrian detection, and sign recognition. In this study, we present the implementation of these ADAS functionalities using Raspberry Pi as the central processing unit along with essential hardware components such as L298N motor driver, servo motor, RPi camera, gear motors, wheels, jumper wires, and vehicle body. Each feature is meticulously explored, detailing the methodology of implementation and the obtained results. This research contributes to the advancement of ADAS technology, showcasing its practical application in enhancing driver awareness and mitigating the risks of road accidents, thus paving the way for safer and more efficient transportation systems.
Key Words: AdvancedDriverAssistanceSystem,RaspberryPi,LaneDetection,PedestrianDetection,SignRecognition.
1.INTRODUCTION
Inrecentyears,theautomotiveindustryhaswitnessedaremarkabletransformationwiththeadventofAdvancedDriver AssistanceSystems(ADAS),whicharedesignedtoaugmentdriverawareness,improveroadsafety,andultimately,reducethe likelihoodofaccidents.Theintegrationofsophisticatedsensors,actuators,andcomputationalalgorithmshasenabledvehicles toperceivetheirsurroundings,anticipatepotentialhazards,andassistdriversinmakinginformeddecisions.Asaresult,ADAS technologyhasemergedasapivotaldrivertowardsachievingthevisionofautonomousdrivingandusheringinaneweraof transportationsafetyandefficiency.
OneofthekeymotivationsbehindthedevelopmentofADASisthepressingneedtoaddressthealarmingrateofroad accidentsworldwide.AccordingtostatisticsfromtheWorldHealthOrganization(WHO),roadtrafficinjuriesarealeading causeofdeathglobally,withmillionsofliveslostandcountlessmoresufferingfromdebilitatinginjurieseachyear.Manyof theseaccidentsareattributedtohumanerror,suchasdriverdistraction,fatigue,orimpairedjudgment,underscoringthe criticalroleoftechnologyinmitigatingsuchrisks.ADASrepresentsaproactiveapproachtowardsenhancingroadsafetyby augmentinghumancapabilitieswithintelligentassistancesystemsthatcandetect,analyze,andrespondtopotentialhazardsin real-time.
ThefoundationofADASliesinthefusionofadvancedsensingtechnologies,computationalintelligence,andhuman-machine interactionprinciples.Sensorssuchasradar,lidar,cameras,andultrasonicdevicesserveastheeyesandearsofthevehicle, capturingrichdataaboutthesurroundingenvironment,includingthepositionofothervehicles,pedestrians,roadsigns,and lanemarkings.Thesesensordataareprocessedbyonboardcomputersequippedwithsophisticatedalgorithmsthatinterpret the information, recognize patterns, and generate actionable insights. Through seamless integration with vehicle control systems,ADAS functionalitiescanmanifest aswarning alerts,automatic braking,steeringassistance,andadaptivecruise control,amongothers,therebyaugmentingdrivercapabilitiesandenhancingoverallsafety.
Rapidadvancementsinmicroelectronics,sensortechnology,andartificialintelligencehaveacceleratedtheevolutionof ADAS from mere conceptual frameworks to practical, commercially available systems deployed in mainstream vehicles. ManufacturersacrosstheautomotiveindustryareincreasinglyincorporatingADASfeaturesintotheirvehiclelineup,ranging fromentry-levelsedanstoluxurySUVs,reflectingthegrowingdemandforsafer,smartertransportationsolutions.Moreover, regulatory agencies and safety organizations have recognized the potential of ADAS in reducing road accidents and have mandatedtheinclusionofcertainsafetyfeatures,suchasautomaticemergencybrakingandlanedeparturewarning,innew vehicles.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net
p-ISSN: 2395-0072
DespitethesignificantprogressmadeinthedevelopmentandadoptionofADAS,severalchallengesremaintobeaddressed to fully realize its potential. Technical hurdles, such as sensor fusion, real-time processing, and robustness to adverse environmentalconditions,poseongoingresearchandengineeringchallenges.Moreover,issuesrelatedtouseracceptance, trust in automation, and ethical considerations surrounding liability and accountability in autonomous driving scenarios requirecarefuldeliberationandsocietalconsensus.Furthermore,theproliferationofADASintroducesnewcybersecurityrisks, asconnectedvehiclesbecomevulnerabletocyberthreatsandmaliciousattacks,necessitatingrobustsecuritymeasuresand protocols.
Inlightoftheseopportunitiesandchallenges,thisresearchaimstocontributetotheadvancementofADAStechnologyby exploringinnovativeapproachestoimplementingkeysafetyfeaturesusingcost-effectiveandaccessiblehardwareplatforms. By leveraging Raspberry Pi, along with off-the-shelf components and open-source software, we seek to demonstrate the feasibilityandeffectivenessofADASfunctionalitiesinenhancingdriverawarenessandmitigatingroadhazards.Through rigorousexperimentationandevaluation,weaspiretovalidatetheperformanceandreliabilityofourADASsystemandpave thewayforitspracticaldeploymentinreal-worldautomotiveapplications.
PreviousresearchinthefieldofAdvancedDriverAssistanceSystems(ADAS)hasfocusedondevelopingandenhancing varioussafetyfeaturestomitigateroadaccidentsandimproveoveralldrivingexperience.Studieshaveinvestigatedtheuseof computervisionalgorithmsforpedestriandetection,lanedeparturewarningsystems,andsignrecognition,aimingtoprovide real-time assistance to drivers in identifying and responding to potential hazards on the road. Additionally, research has exploredsensorfusiontechniques,combiningdatafrommultiplesensorssuchascameras,radar,andlidar,toimprovethe accuracyandreliabilityofADASfunctionalities,particularlyinchallengingenvironmentalconditions.
Furthermore,advancementsinmachinelearningandartificialintelligencehaveenabledmoresophisticatedapproachesto ADASdevelopment,includingpredictivemodellingforanticipatingdriverbehaviorandproactivehazarddetection.These technologieshavepavedthe wayfortheintegrationofautonomousdrivingfeatures, suchasadaptivecruisecontrol and automatedemergencybraking,whichofferincreasedconvenienceandsafetyfordrivers.Overall,theliteraturehighlightsthe importanceofcontinuousinnovationandcollaborationbetweenacademia,industry,andregulatorybodiestodriveforward theevolutionofADAStechnologyanditspracticalapplicationinenhancingroadsafetyandreducingtrafficaccidents.
"AdvancedDrivingAssistanceSystemforCarsUsingRaspberryPi",thisresearchpaperpresentstheimplementationofan AdvancedDriverAssistanceSystem(ADAS)forcarsusingRaspberryPi.Variousfeaturessuchassafedistancemonitoring, emergencybraking,lanedetection,pedestriandetection,andsignrecognitionareintegratedintothesystem.Thehardware components include Raspberry Pi, sensors, actuators, and cameras, while software algorithms process data for real-time decision-making.TheADASsystemdemonstratespromisingresultsinenhancingdriversafetyandawarenessontheroad.
“Smartdriverassistancesystemusingraspberrypiandsensornetworks”,thisresearchpaperexploresthedevelopmentofa smart driver assistance system utilizing Raspberry Pi and sensor networks. Implemented features include safe distance monitoring, emergency braking, lane detection, pedestrian detection, and sign recognition. The system enhances driver awarenessandsafetythroughreal-timedataprocessingandresponsivefeedback,showcasingthepotentialofRaspberryPibasedADAStechnology.
“Self-DrivingLaneDetectionCarUsingPythonandOpenCVonRaspberryPi”,theresearchpaperpresentsaself-drivinglane detection car implemented using Python and OpenCV on a Raspberry Pi platform. The system utilizes computer vision techniquestodetectandtracklanemarkingsinreal-time,enablingautonomoussteeringcontrol.Throughexperimentation,the effectivenessofthelanedetectionalgorithmonRaspberryPiisdemonstrated,showcasingitspotentialforautonomousdriving applications.
UniversalSafetyDistanceAlertDeviceforRoadVehiclespresentsthedevelopmentofanAdvancedDriverAssistanceSystem (ADAS) utilizing Raspberry Pi and various components for safe distance monitoring, emergency braking, lane detection, pedestrian detection, and sign recognition. Results demonstrate the feasibility and effectiveness of integrating ADAS functionalities,highlightingpotentialforenhancingroadsafety.
“AutomatedSelfDrivingCarFollowingLanewithEmergencyBrakingSystem”,Thisresearchpaperpresentsanautomated self-drivingcarsystemequippedwithlanefollowingandemergencybrakingcapabilities.Utilizingadvancedcomputervision algorithms,thesystemaccuratelydetectslanemarkings andmaintainsvehiclealignmentwithinlanes.Inthe eventofan
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
impendingcollision,theemergencybrakingsystemrapidlyappliesbrakestomitigatecollisionseverity.Theintegrationof thesefeaturesenhancesoverallsafetyandrepresentsasignificantsteptowardsautonomousdrivingtechnology.
“Real-timetrafficsigndetectionandrecognitionusingRaspberryPi”,Thisresearchpaperpresentsareal-timetrafficsign detectionandrecognitionsystemimplementedonaRaspberryPiplatform.Leveragingcomputervisiontechniques,thesystem accuratelyidentifiesandinterpretstrafficsignsfromcapturedimagesinreal-time.TheintegrationoftheRaspberryPienables efficient processing and execution of the detection algorithm, making it suitable for deployment in various driving environments.ThisresearchcontributestotheadvancementofADAStechnologyanditspracticalapplicationinenhancing driversafetyandawarenessontheroad.
ThemethodologyemployedintheconceptualizationanddevelopmentoftheADASwasdeeplyrootedinresearch-driven insightsandanalysis.Drawinguponamultifacetedapproachencompassingliteraturereviews,on-fieldsurveys,administrative discussionsinterviews,andstakeholderconsultations,wesystematicallyidentifiedandsynthesizedthekeyresearchfindings thatunderpinnedthedesignandimplementationofthesystem.
Thecomponentsutilizedinthisprojectforimplementingadvanceddriverassistancesystem(ADAS)featuresusingthe ArduinoUnoboardincludeessentialhardwareandsensorscrucialforthefunctionalityofthesmall-scalecarmodel.These components collectively form the backbone of the ADAS implementation, contributing to the enhancement of safety and functionality.
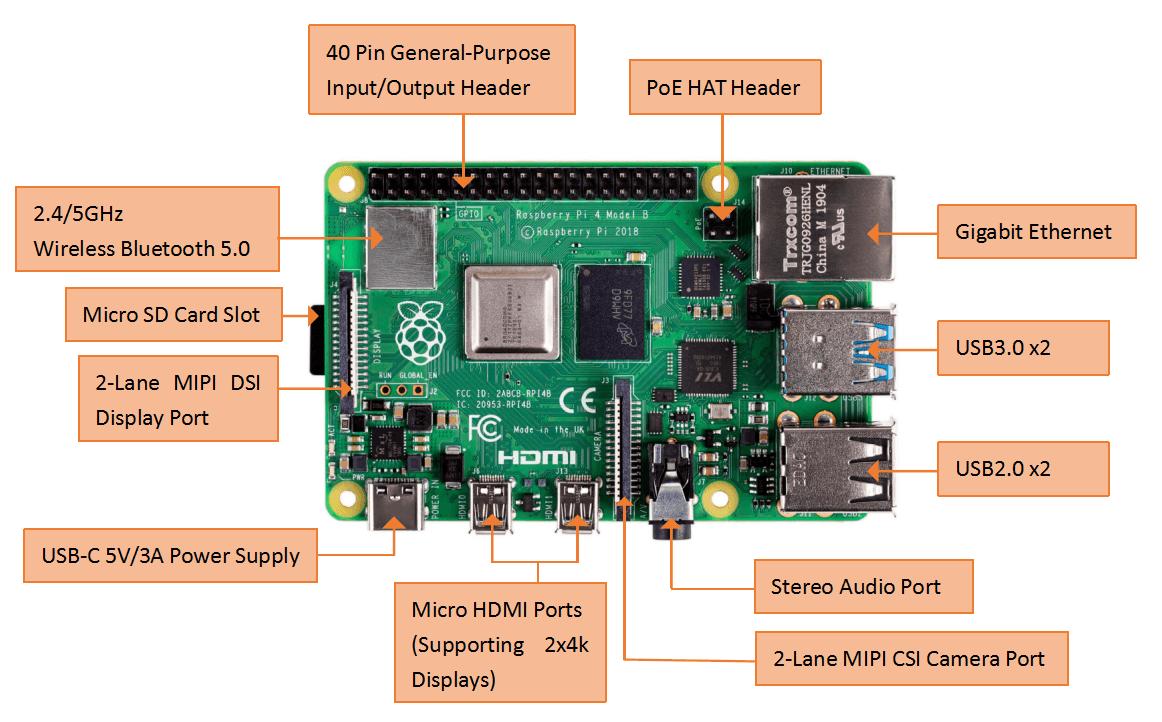
3.1.1 Raspberry Pi:
RaspberryPiisaversatile,creditcard-sizedsingle-boardcomputerrenownedforitsaffordabilityandflexibility.Poweredby aBroadcomsystem-on-chip,itintegrates aCPU,GPU,andRAM,rivalingentry-level desktopperformance.Equippedwith variousports,includingUSB,HDMI,Ethernet,andGPIO,itsupportsdiverseperipheralsandsensors,enablingamyriadof applications.Itslowcost,energyefficiency,andextensivecommunitysupporthavepopularizeditforeducation,prototyping, andDIYprojects.Notably,RaspberryPiservesasacentralcontrollerinadvancedsystemslikeADAS,empoweringautomotive safetywithitscomputationalprowessandconnectivitycapabilities
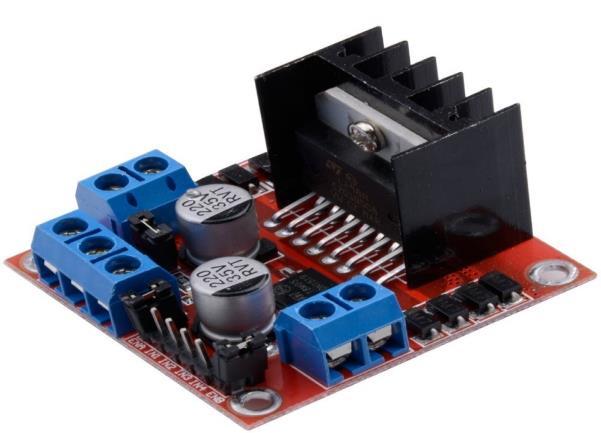
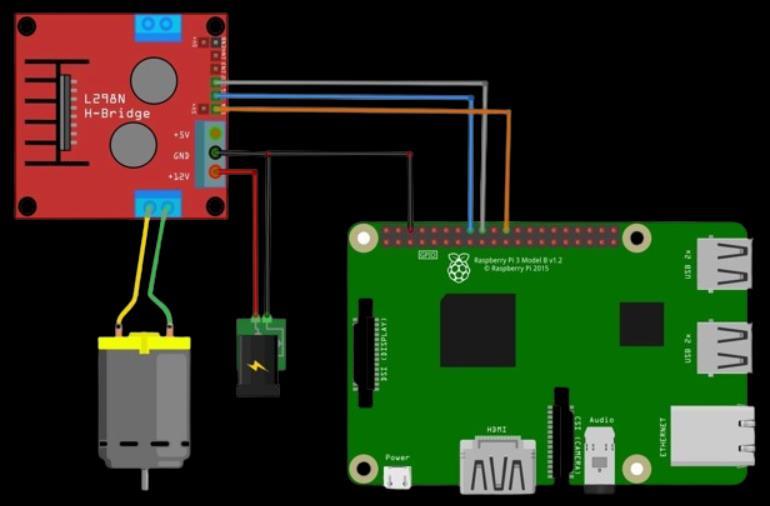
3.1.2 L293N Motor Shield:
TheL298NMotorDriverisanintegratedcircuitusedtocontrolthespeedanddirectionofDCmotors.ItfeaturesdualHbridgeconfigurations,capableofdrivingtwomotorsindependently.Withbuilt-inprotectiondiodes,itallowsbidirectional controlofmotorswhileminimizingtheriskofdamagefrombackelectromotiveforce.TheL298Nsupportsawiderangeof
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
voltagesandcurrents,makingitsuitableforvariousapplications,includingrobotics,automation,andautomotivesystemslike emergencybrakinginAdvancedDriver.
3.1.3 Ultrasonic Sensor:
The ultrasonic sensor serves a pivotal role in ensuring safe distance maintenance and obstacle avoidance for vehicles, utilizingultrasonicwavestomeasuredistancesandnavigateeffectively.Offeringhighprecisionindistancemeasurement,it enablesvehiclestonavigatewithaccuracy,whileprovidingreal-timedatainputtotheArduinoUnofordynamicdecisionmaking,ensuringswiftandadaptiveresponsestochangingenvironments.

3.1.4 Servo Motor:
Aservomotorisarotaryactuatorthatallowsforprecisecontrolofangularposition,velocity,andacceleration.Itconsistsof amotorcoupledwithafeedbackmechanism,typicallyapotentiometeroranencoder,thatprovidespositionalinformationtoa controlsystem.Servomotorsarecharacterizedbytheirabilitytomaintainaspecificpositionortrajectoryeveninthepresence ofexternaldisturbancesorvaryingloads.Theyarewidelyusedinapplicationsrequiringaccuratepositioning,suchasrobotics, CNCmachines,and3Dprinters.InthecontextoftheADASsystem,servomotorsplayacrucialroleinemergencybraking, wheretheyenablerapidandpreciseadjustmentofbrakingforceinresponsetodetectedhazards,enhancingvehiclesafetyand control.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072

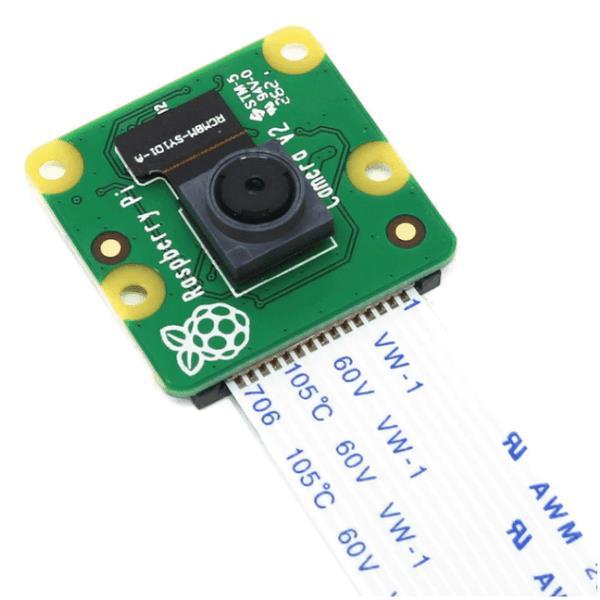
TheRPiCamera(5MP)isacompactcameramodulespecificallydesignedforusewithRaspberryPisingle-boardcomputers. Featuringa5-megapixelsensor,itcaptureshigh-resolutionimagesandvideowithclarityanddetail.Thecameramoduleis equipped with a fixed-focus lens, providing a wide field of view for various applications, including computer vision, surveillance,andphotography.ItssmallformfactorandeasyintegrationwithRaspberryPimakeitidealforprojectsrequiring visualinputorimageprocessingcapabilities.ThecameramoduleconnectsdirectlytotheRaspberryPi'sCSI(CameraSerial Interface)port,enablingseamlesscommunicationanddatatransfer.Withsupportforpopularprogramminglanguageslike Python, developers can easily access and manipulate captured images, making the RPi Camera (5MP) a versatile tool for creativeprojectsandinnovativeapplications.
3.1.6
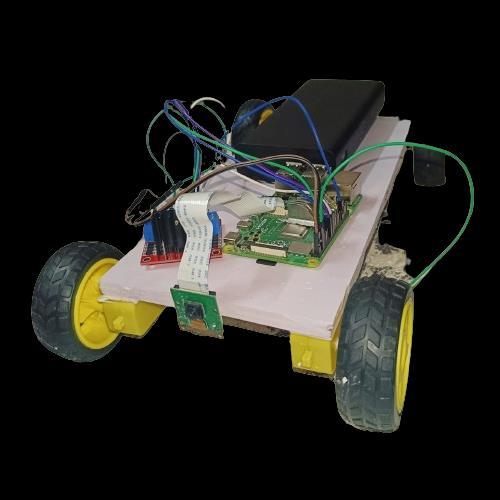
TheADASsystemincorporates4gearmotorsandwheelstofacilitatevehiclelocomotionandsteering.Thesemotorsprovide thenecessarytorqueandrotationalmotiontopropelthevehicleforwardandenableprecisemaneuverability.Jumperwires serve as essential connectors, establishing electrical pathways between various components of the system. They ensure seamlesscommunicationandfunctionalitybetweensensors,actuators,andthecentralprocessingunit.Thevehiclebody, comprisingthechassis,frame,andbodypanels,servesasthestructuralfoundationformountingandintegratingtheADAS hardwarecomponents.Itprovidesstabilityandsupportforthesystem,allowingforreal-worldtestingandvalidationofADAS functionalitiesindiversedrivingconditions.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
ThewiringschematicsandcircuitconnectionsoftheADASVehiclewerecarefullyinspectedtoguaranteesmoothintegration andappropriatecommunicationbetweenthevariouscomponents.Forthesystemtooperatedependably,theselinksmustbe implementedprecisely.
3.2.1
IntheADASsystem,motorconnectionsareestablishedusingtheL298Nmotordriver,aversatileintegratedcircuitcapable ofcontrollingthespeedanddirectionofDCmotors.ThemotordriverinterfacesdirectlywiththeRaspberryPi,receiving control signals via GPIO pins. Through appropriate wiring, the motor driver regulates the power supplied to the motors, ensuringprecisecontrolovertheirrotationalspeedanddirection.Byconfiguringthemotordriveraccordingtothespecific requirementsofeachmotor,theADASsystemcaneffectivelyexecutetaskssuchasemergencybrakingandsteeringassistance withaccuracyandreliability.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
SensorconnectionsintheADASsystemareestablishedthroughtheRaspberryPi'sGPIO(GeneralPurposeInput/Output) pins,whichserveasversatileinterfacesforinteractingwithexternaldevices.Eachsensortypicallyrequirespower,ground,and signalconnectionstotheGPIOpinsforproperoperation.Forexample,distancesensorsforsafedistancemonitoringmay utilizedigitaloranalogpinsforcommunication,whiletheRPicameramoduleconnectstothededicatedCSI(CameraSerial Interface)port. Proper wiringandconfigurationensure seamlesscommunication betweensensorsandtheRaspberryPi, enablingdataacquisitionandprocessingforADASfunctionalities.
ThepowersupplyfortheADASsystemisprovidedbyaportablepowerbank,ensuringflexibilityandmobilityfortesting anddeployment.Thepowerbank,typicallyequippedwithUSBoutputports,deliversastableDCvoltagetotheRaspberryPi andothercomponentsofthesystem.ItofferssufficientcapacitytosustaincontinuousoperationoftheADASfunctionalities, allowing for prolonged testing sessions and real-world demonstrations. The use of a power bank enhances the system's portability,enablingittobedeployedinvariousenvironmentswithoutrelianceontraditionalACpowersources.Additionally, thepowerbank'srechargeablenatureensuresconvenientandcost-effectiveoperationoverextendedperiods.
The ADAS system comprises a Raspberry Pi as the central processing unit, interfacing with sensors, actuators, and peripherals.SensorssuchasdistancesensorsandtheRPiCameracaptureenvironmentaldata,whileactuatorslikeservo motorsenableresponsiveactionssuchasemergencybraking.TheRaspberryPiprocessessensorinputsusingalgorithmsfor functionalitieslikesafedistancemonitoring,lanedetection,andpedestriandetection.Thesefeaturesenhancedriverawareness andsafetyontheroad.Powerissuppliedbyaportablepowerbank,ensuringmobilityandflexibility.Thesystem'sarchitecture emphasizesreal-timedataprocessing,seamlessintegration,andpracticaldeploymentforenhancingautomotivesafety.
AnAdvanceDriverAssistanceSystem(ADAS)'s(oritscomponentsandinteractions)structureisdefinedduringthecrucial SystemArchitectureDesignphaseofdevelopment.Thisisathoroughexplanationofourproject'sSystemArchitectureDesign:
4.1
Safedistancemonitoringisimplementedusingultrasonicdistancesensorsmountedatthefrontofthevehicle,connectedto theRaspberryPi'sGPIOpins.Aprogramcontinuouslyreadssensordataandcalculatesthedistancebetweenthevehicleand theprecedingone.Ifthecalculateddistancefallsbelowapredefinedthreshold,visualandaudiblewarningsaretriggeredto alertthedriverofthepotentialcollisionrisk.Thisfeatureaimstopreventrear-endcollisionsbyprovidingreal-timefeedback tothedriver,promptingthemtoadjusttheirspeedormaintainasafefollowingdistance,therebyenhancingoverallroadsafety andreducingthelikelihoodofaccidents.
EmergencybrakingisimplementedusingservomotorsconnectedtothebrakingmechanismviatheL298Nmotordriver.An algorithmdetectsimminentcollisionsbasedonsensorinputs,suchasdistancesensorsorcameradata.Upondetection,the algorithmrapidlyactivatestheservomotorstoapplybrakingforce,bringingthevehicletoahalt.Thisfeatureensuresswift and effective response to potential accidents, mitigating collision severity and enhancing overall safety by providing an additionallayerofprotectionagainstunexpectedhazardsontheroad.
4.3
Lanedetectionutilizesa forward-facingRPi Camera mountedon thevehicle'swindshield.Computervisionalgorithms processthecapturedimagestoidentifylanemarkings.Byanalyzingpixelintensityandpatterns,thealgorithmdetectslane boundaries and estimates the vehicle's position within the lane. Visual feedback is provided to the driver, indicating the detectedlanemarkingsandthevehicle'salignment.Thisfeatureassistsdriversinmaintainingproperlanedisciplineand
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
provides warnings if the vehicle drifts out of its lane, enhancing road safety by reducing the risk of lane departurerelatedaccidents.
Pedestrian detection employs the RPi Camera to capture images of the surrounding environment. Image processing algorithmsanalyzetheseimagestodetectandlocalizepedestrianswithinthevehicle'spath.Utilizingtechniquessuchasobject detectionandpatternrecognition,thealgorithmidentifieshuman-likeshapesanddistinguishesthemfromthebackground. Upondetection,thesystemtriggersvisualandauditoryalertstonotifythedriverofpedestrianpresence,promptingthemto takeevasiveactionifnecessary.Thisfeatureenhancesroadsafetybyprovidingtimelywarningsandmitigatingtheriskof pedestrian-relatedaccidents,particularlyinurbanenvironmentswherepedestriantrafficisprevalent.
SignrecognitionutilizestheRPiCamera tocaptureimagesoftrafficsignsalongtheroad.Imageprocessingalgorithms analyzetheseimagestodetectandinterpretvarioustrafficsigns,suchasspeedlimits,stopsigns,anddirectionalarrows.By employingtechniquesliketemplatematchingandfeatureextraction,thealgorithmidentifiessignshapes,colors,andsymbols. Onceasignisrecognized,thesystemprovidesvisualorauditoryalertstothedriver,conveyingrelevantinformationaboutthe roadconditionsandregulatorysignage,therebyenhancingdriverawarenessandcompliancewithtrafficregulations.
In the implementation of the Advanced Driver Assistance System (ADAS) using a small-scale car model, the system demonstratedpromisingresultsacrossvariousfunctionalities.Safedistancemonitoringaccuratelymeasuredthedistance between the model car and obstacles ahead, triggering warnings when the distance fell below a predefined threshold. Emergencybrakingwaseffectiveinhaltingthecarmodelinsimulatedcollisionscenarios,showcasingthesystem'srapid response capabilities. Lane detection successfully identified lane markings on the miniature road track, providing visual feedbacktothedriveraboutlanealignment.
Thepedestriandetectionfeaturereliablyidentifiedhuman-likeshapesonthetrack,signalingthepresenceofpedestrians andpromptingappropriatedriveraction.Despitethechallengesofscalingdownthesystemforaminiatureenvironment,the pedestriandetectionalgorithmprovedrobustandresponsive.Signrecognitionaccuratelyidentifiedandinterpretedtraffic signs placed along the track, offering real-time information to the driver regarding speed limits, stop signs, and other regulatorysignage.Overall,theADASsystemexhibitedconsistentperformanceinenhancingdriverawarenessandsafety withintheconstrainedsettingofthesmall-scalecarmodel.
However, limitations were observed, particularly regarding the system's scalability to real-world applications. While effectiveinacontrolledenvironment,theperformanceofcertainfeaturesmayvaryunderdifferentlightingconditions,road surfaces,andtrafficdensitiesencounteredonactualroads.Additionally,thecomputationalresourcesoftheRaspberryPimay poseconstraintsonthecomplexityandspeedofalgorithms,impactingreal-timeresponsivenessindynamicdrivingscenarios. Furtheroptimizationandtestingarenecessarytoaddressthesechallengesandensuretherobustnessandreliabilityofthe ADASsystemforfull-scaleimplementationinrealvehicles.
Overall,theresultsdemonstratethefeasibilityandeffectivenessofimplementingADASfunctionalitiesinasmall-scalecar model.Whilelimitationsexist,thesystemshowspromiseinenhancingdriversafetyandawareness,layingthegroundworkfor futureadvancementsinADAStechnologyforbothminiatureandfull-scaleautomotiveapplications.
Inconclusion,theimplementationofanAdvancedDriverAssistanceSystem(ADAS)usingasmall-scalecarmodelhas provided valuable insights into the feasibility and effectiveness of integrating safety features in miniature automotive environments.Thesuccessfulexecutionoffunctionalitiessuchassafedistancemonitoring,emergencybraking,lanedetection, pedestrian detection, and sign recognition demonstrates the potential of ADAS technology to enhance driver safety and awareness in constrained settings. Despite challenges related to scaling down the system and ensuring real-time responsiveness,theresultssuggestthatADAScaneffectivelymitigaterisksandimprovedrivingexperienceeveninminiature scenarios.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 1Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Lookingahead,furtherresearchanddevelopmenteffortsareneededtoaddressthelimitationsobservedandtorefinethe ADASsystemforfull-scaleimplementationinrealvehicles.Optimizationofalgorithms,enhancementofsensorcapabilities,and integration of more sophisticated hardware components will be crucial for achieving robust and reliable performance in diverse driving conditions. Additionally, collaboration with automotive manufacturers and regulatory authorities will be essentialtoensurecompliancewithsafetystandardsandregulations,aswellastofacilitatetheadoptionofADAStechnologyin mainstreamvehicles.Overall,thefindingsunderscorethesignificanceofADASinadvancingautomotivesafetyandpavethe wayforfutureinnovations aimedatcreatingsaferand moreintelligenttransportationsystemsforthebenefit ofdrivers, passengers,andpedestriansalike.
Weextendourheartfeltgratitudetoallthosewhocontributedtotherealizationofthisresearchpaperonadvancedriver assistancesystems.
Firstandforemost,weexpressoursincereappreciationtotheparticipantsofourresearchstudies,includingstudents, facultymembers,administrators,andITprofessionals,whoseinvaluableinsightsandfeedbackformedthefoundationofour work.Theirwillingnesstosharetheirexperiencesandperspectiveswasinstrumentalinshapingthedirectionandfocusofour research.
Wearedeeplythankfultotheauthorsofpreviousresearchstudies,academicpapers,reports,andcasestudiesthatwe consultedduringthecourseofthisresearch.Theircontributionsprovideduswithvaluablecontext,insights,andinspiration, enrichingthedepthandbreadthofourunderstandingofthesubjectmatter.
Together,thecollectiveeffortsofallthosementionedabovehaveplayedanintegralroleinthedevelopmentandcompletion ofthisresearchpaper.Wearetrulygratefulfortheircontributionsandproudtoacknowledgetheirimpactonourwork.
[1] https://link.springer.com/article/10.1007/s43684-023-00047-5
[2] "AdvancedDrivingAssistanceSystemforCarsUsingRaspberryPi",RamachandraAC,VViswanatha,HSuhas,KKishor, RamachandraACetal./IndianJournalofScienceandTechnology2022;15(40):2056–2065.
[3] Smartdriverassistancesystemusingraspberrypiandsensornetworks,V.SanjayKumar,S.NairAshish,I.V.Gowtham, November2020MicroprocessorsandMicrosystems,79(8):103275,DOI:10.1016/j.micpro.2020.103275.
[4] “DrivingLaneDetectionCarUsingPythonandOpencvonRaspberryPi”,VenkataShivaPrasadNannuri,SaiSantoshKumar Mantha,NikhileshPottipally,SaiKrishnaKodatiandSureshT.VKumar.
[5] “UniversalSafetyDistanceAlertDeviceforRoadVehicles”.MaticVirantandMihaAmbrož.
[6] AutomatedSelfDrivingCarFollowingLanewithEmergencyBrakingSystem.RihamChowdhury,ZahirulIslam,StanleyDip Rozario, Zaber Mohammad, Maria Islam EmaICCA 2020: Proceedings of the International Conference on Computing AdvancementsJanuary2020.
[7] Real-timetrafficsigndetectionandrecognitionusingRaspberryPi,IdaSyafizaBintiMdIsa;Choy,JaYeong;NurLatifAzyze BinMohdShaariAzyze. InternationalJournalofElectricalandComputerEngineering;YogyakartaVol.12,Iss.1, (Feb 2022):331-338.DOI:10.11591/ijece.v12i1.pp331-338
[8] https://en.wikipedia.org/wiki/Raspberry_Pi_4
[9] https://www.raspberrypi.com/products/raspberry-pi-4-model-b/specifications/
[10] https://components101.com/modules/l293n-motor-driver-module