


enriquecidos para la percepción del vehículo conectado


✓ Introducción
✓ Planteamiento:
✓ Objetivo General
✓ Objetivo Específico
✓ Resultados esperados
✓ Retos
Introducción


• Proyecto DIVEC (Diseño Inteligente del Vehículo Eléctrico y Conectado):
Hoy en día se están produciendo grandes avances tecnológicos en el vehículo conectado con el objetivo de reforzar aquellos beneficios de la movilidad que afectan a la sociedad e impulsar tecnologías que ayuden a preservar el medio ambiente.
Esta ponencia se enmarca dentro de las actividades del proyecto DIVEC, del programa PERTE VEC, para el desarrollo del vehículo eléctrico y conectado, financiado por el MINCOTUR a través del Plan de Recuperación, Transformación y Resiliencia, y los fondos Next Generation de la CE.
El consorcio DIVEC está liderado por Renault y agrupa a 13 empresas españolas de distintos ámbitos, entre las que se encuentran Estudios Gis y Microelectrónica Maser, apoyadas tecnológicamente por Tecnalia Research & Innovation:



• Objetivo general del proyecto: Investigar métodos de obtención y tratamiento de datos de movilidad para generar nuevo conocimiento que genere nuevas soluciones inteligentes para la ayuda a la conducción y futuros sistemas conectados, basándose en modelos de negocios orientados a la Inteligencia Artificial.
• Objetivo específico del caso de uso “Diseño de mapeado inteligente” (Smart mapping o Mapas enriquecidos): Creación de modelos basados en técnicas IA usando la información recogida por tecnologías LiDAR y de visión artificial, combinadas con datos geoespaciales de alta precisión, y cuya fusión optimice el enriquecimiento de mapas 3D.
• Motivación: Los vehículos de conducción autónoma necesitan gran cantidad de información para poder operar. Si parte de esta información puede ser conocida a priori, parte con ventaja.
Los mapas 3D permiten grandes ventajas:
• Localización precisa: localización basada en nubes de puntos
• Navegación segura: conocimiento de los carriles y espacios de conducción
• Percepción aumentada: información de los elementos estáticos de la vía (señales, semáforos, …)
• Localización basada en nubes de puntos:
Los vehículos autónomos necesitan localizarse en exteriores de manera precisa y sin posibilidad de fallo. Para ello se utilizan diferentes fuentes de posicionamiento, fusionando los datos y aprovechando las ventajas de cada sistema.
Los métodos más utilizados están basados en GNSS (Sistema global de navegación por satélite). Posicionamiento preciso y global, pero con posibilidad de errores por fuentes externas, ruido de los satélites, rebotes de señales en edificios altos, …
Otra fuente muy extendida de posicionamiento es el uso de IMUs (Unidad de medida inercial). Este sensor mide e informa acerca de la velocidad, orientación y fuerzas gravitacionales de un aparato, usando una combinación de acelerómetros y giróscopos. Obtiene desplazamientos relativos y acumula error de medida sino es realimentado con una medida global.
• Localización basada en nubes de puntos:
Con ello proponemos utilizar un método de posicionamiento basado en nubes de puntos. Este método necesita hacer una grabación previa del mapa o utilizar técnicas que graban mientras se va conduciendo (SLAM).
Nuestra propuesta se centra en una grabación previa utilizando sensores de alta precisión, y luego utilizar estas grabaciones con sensores “más sencillos” que puedan ser utilizados en aplicaciones reales.
• Localización basada en nubes de puntos:
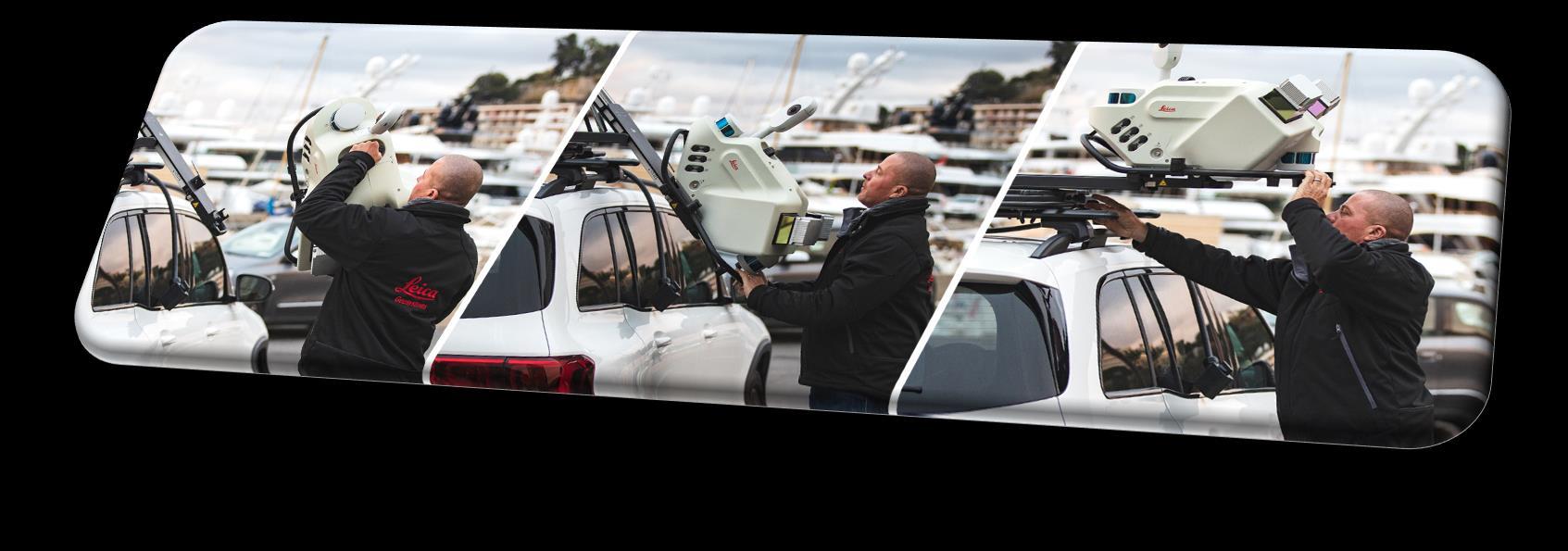
Captura masiva de nubes de puntos 3D e imágenes panorámicas 360º con sistema Mobile
Mapping Leica Pegasus TRK 700 Evo


o Sistema GNSS multiconstelación y multifrecuencia
o 4 unidades LiDAR embarcadas (2 perfilómetros + 2 SLAM/densificación)
o Sistema inercial (IMU) con velocidad de refresco de 400Hz
o Odómetro mecánico u óptico
o Sistema SLAM para dar robustez a la trayectoria en ausencia de posicionamiento GNSS como túneles y en zonas con orografía poco favorable para una correcta recepción de la señal GNSS (reduce la inclusión de puntos de control en campo para el ajuste de la trayectoria)
o Precisión absoluta mejor de 2 cms
o Nivel de ruido submilimétrico
o Máxima velocidad de giro: 2 Millones puntos/segundo
• Localización basada en nubes de puntos:
o Circuito Alpine
o Circuito Dacia
o Circuito Infiniti
o Circuito Renault corto
o Circuito Valladolid corto









• Localización basada en nubes de puntos:
• Grabaciones con sistema Mobile Mapping Pegasus TRK de Leica:

• Localización basada en nubes de puntos:
• Comparación contra GNSS:
El GNSS permite obtener un posicionamiento de alta calidad solo que es susceptible de fallos. Así, se utilizará como herramienta de validación contra la herramienta desarrollada y así poder comparar su rendimiento.
Para ello se utilizará uno de los circuitos habituales de prueba de Renault en Valladolid como entorno de pruebas
• Actualización de mapas 3D:
Los mapas deben ser actualizados para seguir conservando su utilidad. Para ello se propone desarrollar un sistema de reconocimiento automático de señales basado en inteligencia artificial que detecte las señales utilizando las cámaras externas del vehículo.
Las señales son detectadas y ponderadas para cerciorarse que no es un falso positivo o negativo que pueda producir un error en el mapa.
El sistema propuesto permite la generación y actualización automática de mapas 3D para su uso en sistemas inteligentes de transporte.
• Actualización de mapas 3D: Resultados esperados

• Actualización de mapas 3D: Resultados esperados

• Actualización de mapas 3D: Resultados esperados

• Actualización de mapas 3D: Resultados esperados

• Mejorar la localización de los vehículos inteligentes:
Los mapas 3D permiten localizarse de una manera precisa como complemento al GNSS y otros métodos de posicionamiento para conseguir una mejor localización que permita una navegación más precisa.
• Actualizar la información de los mapas con la señalización vertical:
La información de los mapas puede quedar desactualizada debido a cambios en la infraestructura, lo que llevaría a errores. Por eso con la herramienta propuesta se pretende conseguir una actualización automática de estos, y que puedan seguir dando una información precisa.


