UNIVERSIDAD IBEROAMERICANA // THE BAUHAUS-UNIVERSITÄT WEIMAR
PORTFOLIO SELECTED WORKS

COMPUTATIONAL DESIGN

MARIANA H. BARROETA

UNIVERSIDAD IBEROAMERICANA // THE BAUHAUS-UNIVERSITÄT WEIMAR
PORTFOLIO SELECTED WORKS
COMPUTATIONAL DESIGN

Universidad Iberoamericana
Bachelor of Architecture
Final grade of 9.4 // GPA 3.76 (4.0 scale)
Graduated with Honors + Thesis with Special Mention
Mexico City, Mexico
The Bauhaus-Universität Weimar
Architecture and Urbanism - Architectural Design
Summer program
Weimar, Germany
Japanese Language
Osaka, Japan
Kaplan - PLI
English Language
Vancouver, Canada
mUcHo - Estudio / Taller
Irnernship
Concept design, architectural projects
Mexico City, Mexico
ASTECA, Aviation School
Human resources and Administration
Mexico City, Mexico
ACIA - Asociacion Cultural para la Investigacion sobre Asia
Japanese language tutor
Mexico City
MS Office
Adobe CC
CAD
3D Modeling
Word / Excel / Powerpoint
Photoshop / InDesign / Illustrator
AutoCAD / Revit
Rhino + Grasshopper + Python / Sketchup
GH plugins - Chromodoris, Flex (cloth simulation), Human (texture mapping), Kangaroo2, LunchBox, Millipede, RhinoVault2, Topos, Wasp, Weaverbird
Rendering
Digital Manufacturing
3Ds Max + Corona / Twinmotion
3D Printing (Cura slicer) / Universal Robots / KUKA KR-150
Spanish
English
Japanese
German
Mother tongue
C1 (Advanced)
N2 (Advanced)
A1 (Beginner)
Computational Design
Concept Tools
Architectural Project
Welcome to my portfolio, a curated collection of works showcasing my expertise in the realm of computational design and digital fabrication.
With a deep passion for innovation and a keen understanding of the transformative power that arises from the seamless integration of human creativity and computational capabilities, I strive to push the boundaries of architectural expression.
Through meticulous exploration of intricate forms, rigorous application of advanced algorithms, and mastery of cutting-edge technologies, each project presented here represents a testament to the union of artistry and technological capabilities.
Thank you for taking the time to explore my architect portfolio. I am excited about the prospect of collaborating on future architectural endeavors and creating spaces that transcend the ordinary, leaving an indelible mark on the world around us.
(D)
Collection of skills
Rhino + GH + Python p.11
Fab Lab p.20
Designing with code p.28
Thesis p.40
Computational design empowers architects with a suite of digital tools, enabling them to devise innovative and optimized solutions that transcend traditional design boundaries.
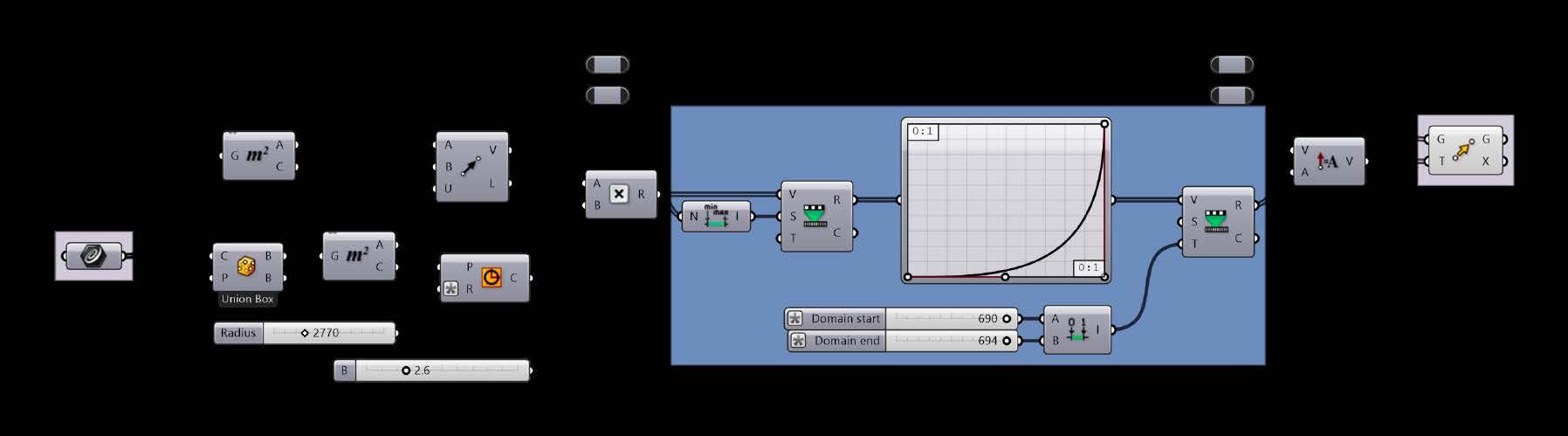
My work in computational and parametric design revolves around harnessing the capabilities of tools like Rhino, Grasshopper, and Python to achieve exceptional results. By exploring the realms of geometry, patterns, scales, and mathematics, I delve into the possibilities offered by these digital platforms. Through experimentation in these projects, I aim to push the boundaries of architectural design, creating intricate and dynamic forms that seamlessly integrate aesthetics, functionality, and innovation.
The following projects were developed during the thesis course “Digital Project and Production Workshop“ and the elective course of Python.






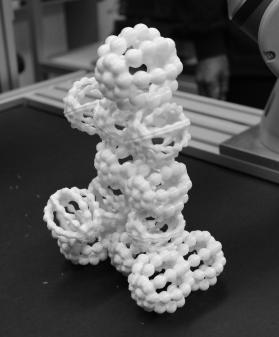
Loop cage
Rendered in Twinmotion





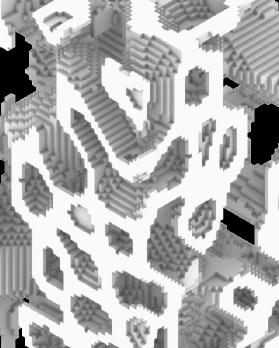
Conceptual Project - Perlin Noise Habitat Rhino + Dall-E (Artificial Intelligence)



Script
Grasshopper +
Python script developed by: Rodrigo Díaz Escalante (tutor)



https://www.behance.net/arquiaz

Conceptual Project - Quetzalcoatl’s Temple
Rendered in Twinmotion

The intricate interplay between skeletons and muscles orchestrates the harmonious movement and functionality of the human body.
In this project, the primary objective entailed the development of a meticulously designed piece capable of being assembled using a robotic arm provided by Universal Robots. The design process focused on intricate aspects, including organic assembly, spherical clusters, scale management, system integration, geometric tolerance, and the intricate structures involved. Leveraging the computational prowess of Rhino and Grasshopper, alongside the aid of the Topos plug-in, the piece was meticulously designed to seamlessly amalgamate these design considerations, culminating in an aesthetically captivating and technologically advanced creation.

Each piece was 3D printed in PLA plastic. For the robotic assembly, the team designed a series of swappable grippers. These grippers were to function without any electrical feature.
I was responsible of the design of the elements as well as the design of the claw gripper.
In collaboration with: Andrea Oseguera, Carolina Martinez.
System

Grasshopper PythonScript + _topos (developed by Rodrigo Díaz Escalante (Python tutor))


Claw gripper
3D Printed, assembled with thread in joints. Installed in the robotic arm, works with a system of weight + thread + rotation (no electrical components needed)


Universal Robots UR3

Mechatronics Engineering Laboratory
Adjustments to the coordinates and movement speed.
Final assembly
Body - skeletons + muscles

Exploring the design of fictional objects, driven by the potential of computational tools such as Rhino, Grasshopper, and Python and through the synergy between human creativity and digital processing capabilities, I delve into a world of limitless possibilities. Through this work, I seek to forge new paths in conceptualizing and materializing objects, harnessing the power of computational tools to bring my boldest ideas to life.
This work narrates the story of the artificial creation of a deadly weapon that was utilized during the extermination of the last Shin generations in Japan. With the support of artificial intelligence and computational programming languages, humanity transformed nature into an inhospitable machine. The future’s promise - the xenobot - was manipulated for profit and became the ultimate tool of destruction. We will study the methods followed by the ruling power to manufacture the Judan and discover the reach that these weapons achieved.
Project made with _topos plugin, developed by: Rodrigo Díaz Escalante (tutor)
https://www.behance.net/arquiaz
By harnessing the potential of computational tools, architects can unleash their limitless creativity.
War Xenobot
An infectious weapon


Root Xenobot
Grasshopper python script
Rhino drawing
Plant Xenobot
Grasshopper python script
Rhino drawing

Plant Xenobot
Grasshopper python script
Rhino drawing
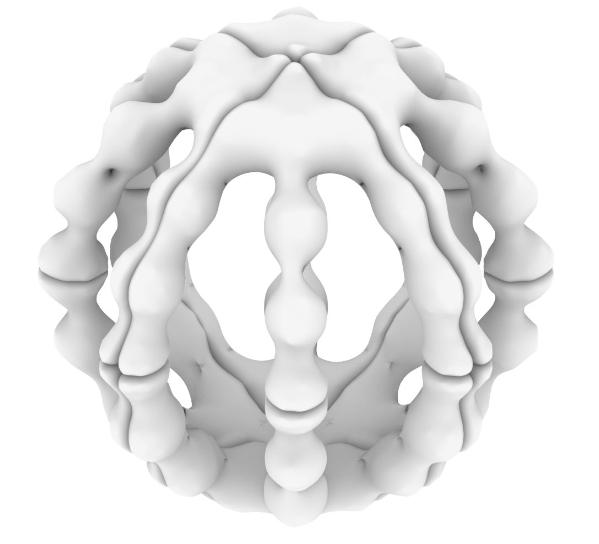
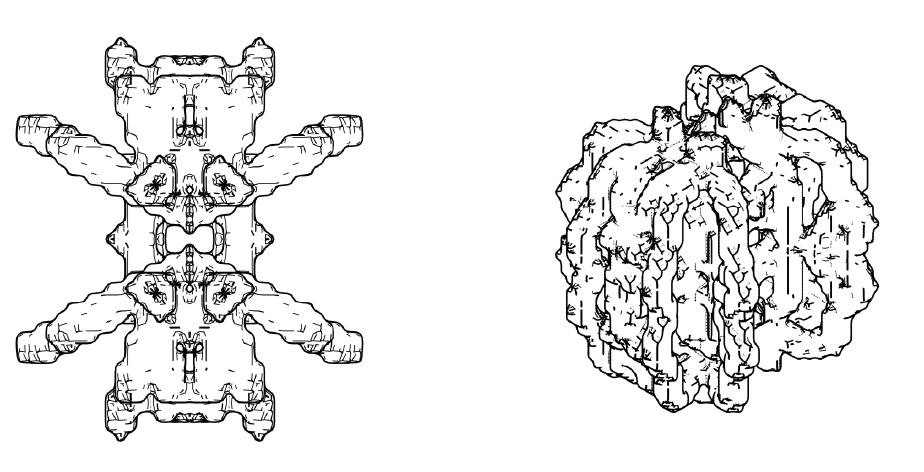
Fungus Xenobot (carcass & skeleton)


Grasshopper python script
Rhino drawing
System Curve - voxel - subdivision - cubic mirror - mesh

Root Xenobot
Vegetation and assets from Quixel Megascans

Modeled and rendered in Twinmotion
Edited in Photoshop
System Curve - voxel - subdivision - cubic mirror - mesh

Plant Xenobot
Vegetation and assets from Quixel Megascans

Modeled and rendered in Twinmotion
Edited in Photoshop
System Surface - points - voxel - cubic mirror - mesh

Fungus Xenobot
Vegetation and assets from Quixel Megascans

Modeled and rendered in Twinmotion
Edited in Photoshop
Uniting tradition and technology for architectural innovation. Embracing the past, shaping the future.



It represents the fusion between tradition and innovation, encompassing the past, present, and future of construction systems in Mexico using one of Mexico’s most emblematic materials: ceramics. This project manifests conceptually and materially the combination of analysis, research, computational design, and additive digital manufacturing, while also being grounded in the theoretical and practical aspects of modern architectural practice.
This thesis was the result of collaboration within the TPPD 2022-2023 generation, where responsibilities were divided into design, material, and fabrication.
My work focused on the fabrication script, and I was responsible for preparing the thesis presentation along with the graphic material.
This project was made in collaboration with


Mandala Script
Grasshopper
Mandala

Sequence of 3 types of elements:
A, B and C
Render Credits: Ivan


Lorem Ipsum
Blue pigments

Lorem Ipsum
Photo credits: Dinorah Martinez (tutor)
Lorem Ipsum
Mixing ingredients
Lorem Ipsum
Photo credits: Dinorah Martinez (tutor)

KUKA - Digital Fabrication Script
Grasshopper


Extruding Material











