Research Assistant in Architectural Informatics Lab, Hsinchu, Taiwan
Computational Design, Digital Fabrication, Multi-media
Intership in Neri&Hu Design and Research Office, Shanghai, China
Design Development Drawing of DQSW Headquater, Schematic Design of Collective Housing, Interior Design of Housing
| Education |
Master of Science in Architecture - Graduate Institute of Architecture, National Yang Ming Chiao Tung University Bachelor of Architecture - Department of Architecture, National Cheng Kung University
A tensegrity-based robot with environmental adaptability, structural flexibility, and versatile movements allowing for robotic operations in confined spaces
[Instructor]
June-Hao Hou
[Publication]
Full-Paper Accepted by CAADRIA 2024 (Conference Proceedings, Vol.3, pp.131-140)
Available at: https://papers.cumincad.org/cgi-bin/works/paper/caadria2024_76
[Research Type]
Independent Design Research, Master Thesis
[Project Year] 2023 - 2024
Biomimicry has played a pivotal role in robotics. In contrast to rigid robots, bio-inspired robots exhibit an inherent compliance, facilitating versatile movements and operations in constrained spaces. The robot implementation in fabrication, however, has posed technical challenges and mechanical complexity, thereby underscoring a noticeable gap between research and practice. To address the limitation, the research draws inspiration from the unique musculoskeletal feature of vertebrate physiology, which displays significant capabilities for sophisticated locomotion. The research converts the biological paradigm into a tensegrity-based robotic system, which is formed by the design of rigid-flex coupling and a compliant mechanism. This integrated technique enables the robot to achieve a wide range of motions with variable stiffness and adaptability, holding great potential for advanced performance in ill-defined environments. In summation, the research aims to provide a robust foundation for tensegrity-based biomimetic robots in practice, enhancing the feasibility of undertaking intricate robotic constructions.
Design Methodology
[Biomimicry]
This research problem outlined technical challenges associated with robot structure within current robotic operations. While traditional rrigid robots have been widely used in fabrication industries, they can hardly operate in confined spaces. Conversely, though soft robots demonstrate a noticeable performance in ill-defined environments, they can neither perform load-bearing tasks nor be easily manipulated.
Taking inspiration from biomechanics, specifically the physiology of vertebrates, the research set out to explore how robots could adjust their structural stiffness based on environmental conditions or task requirements. Studies have highlighted that the integration of bones, muscles, and joints in vertebrates, ensures an efficient tradeoff between rigidity and flexibility, which shares a significant similarity with tensegrity structures. Therefore, this tensegrity-based concept with adaptability and control efficiency served as the foundation of this project.
Physiology of Vertebrates
Structural and Robotic System Design
Representation
Bio-Inspiration
Musculoskeletal (Rigid-Flex) System
Bones (Rigid Component)
Muscles & Tendons (Soft Component) Joint
Compression (Rigidity)
Tension (Flexibility)
Flexible Node
Biomechanics
Snake Bird Neck
Adjustable stiffness depending on current environment or task requirement
Biomimetic Robot Based on Similarity Between Vertebrates and Tensegrity Structure
Fish
Figure 1. Design research framework of the biomimetic solution
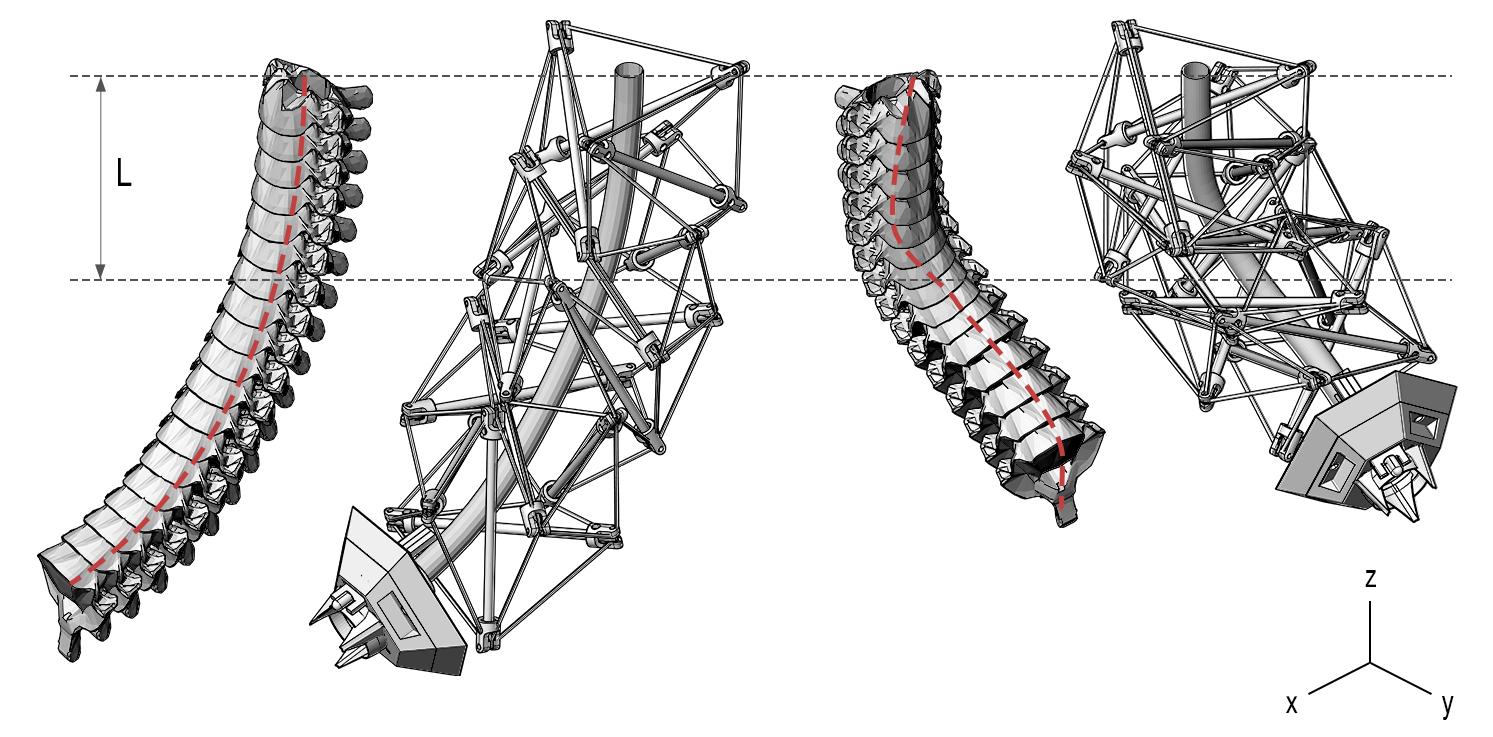
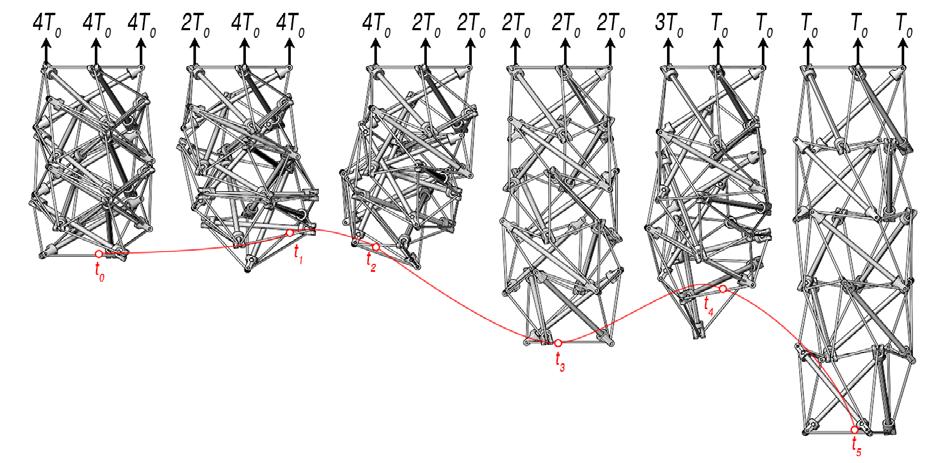
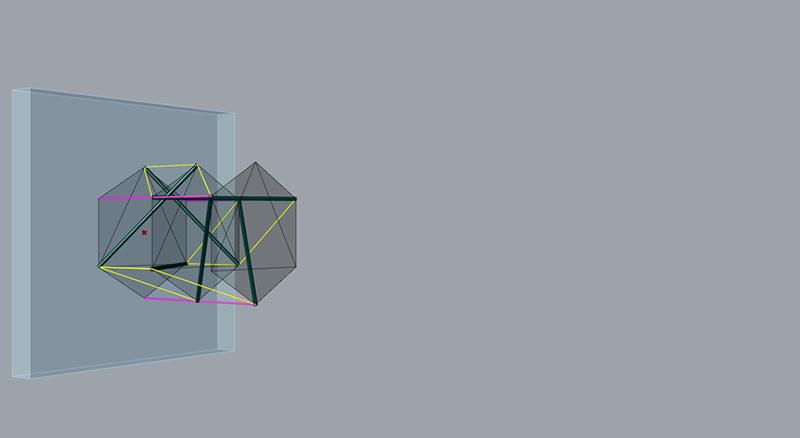
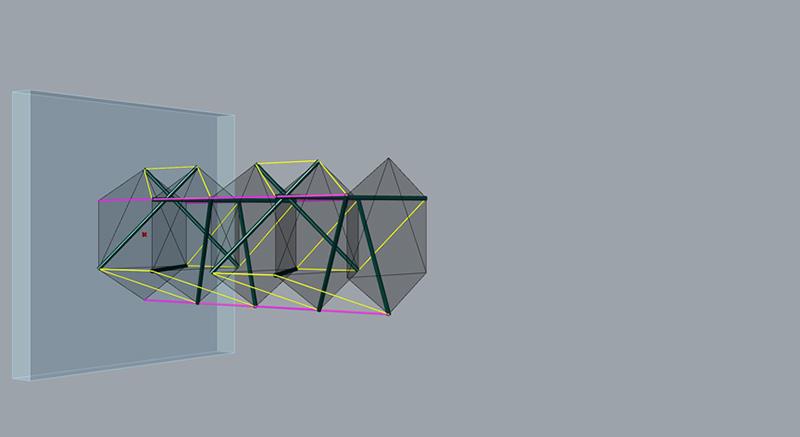
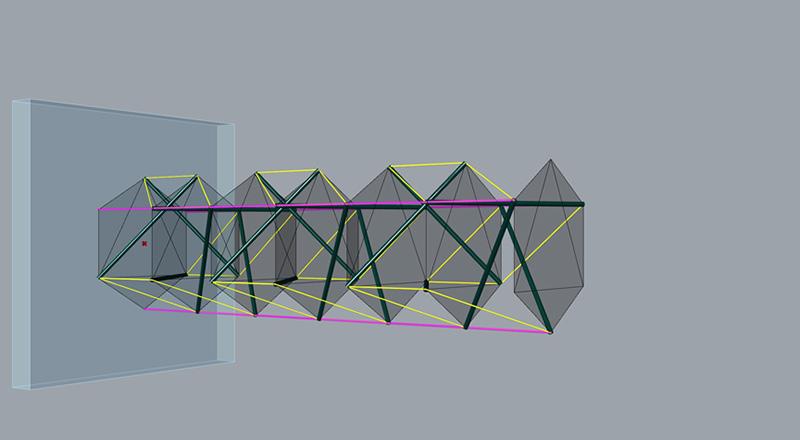
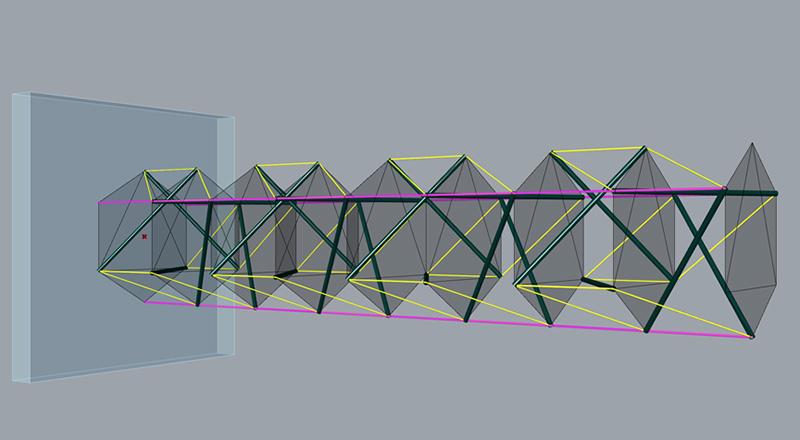
Figure 2. Structural deisgn of the numerical tensegrity structure
[Numerical Tensegrity Robot Structure]
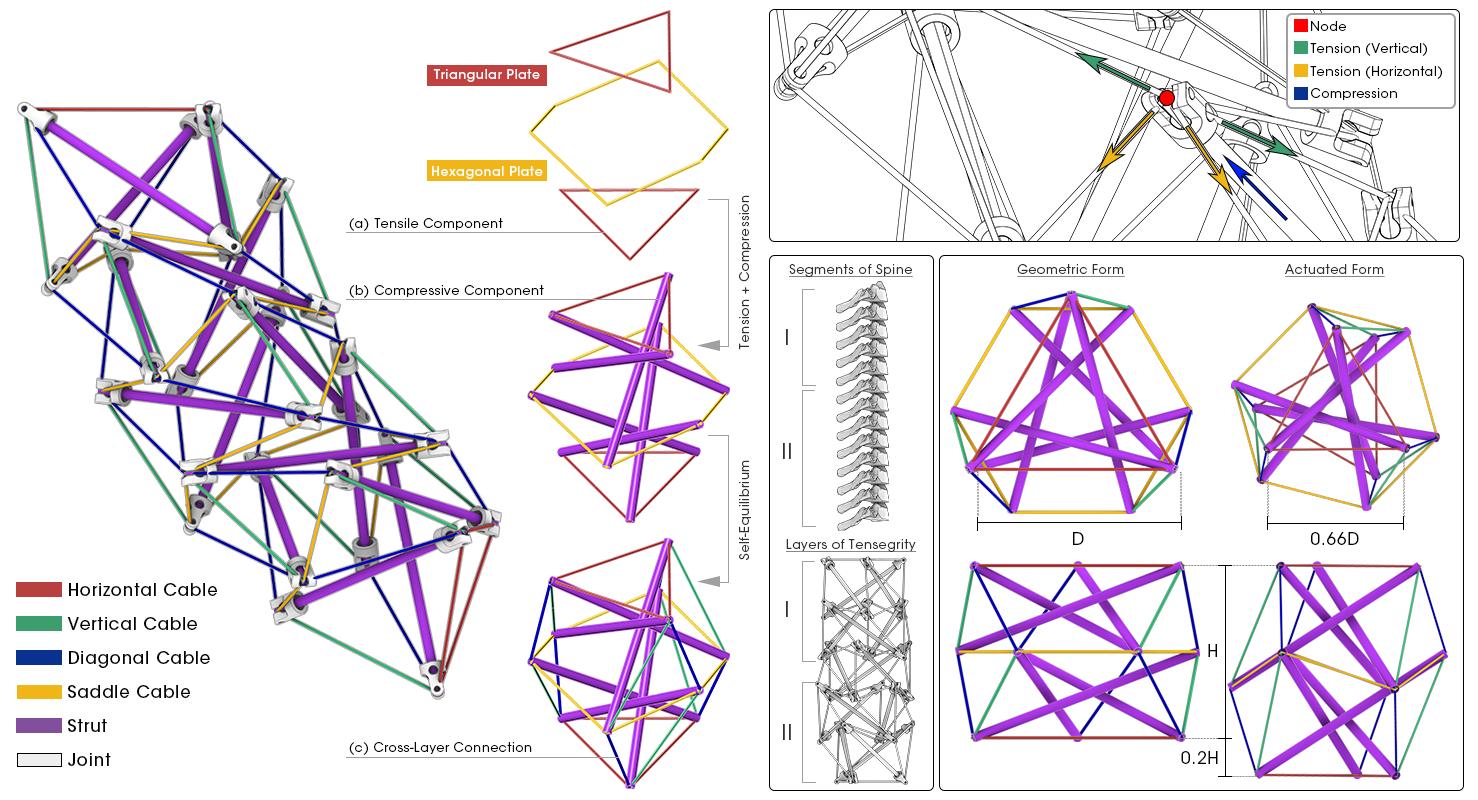
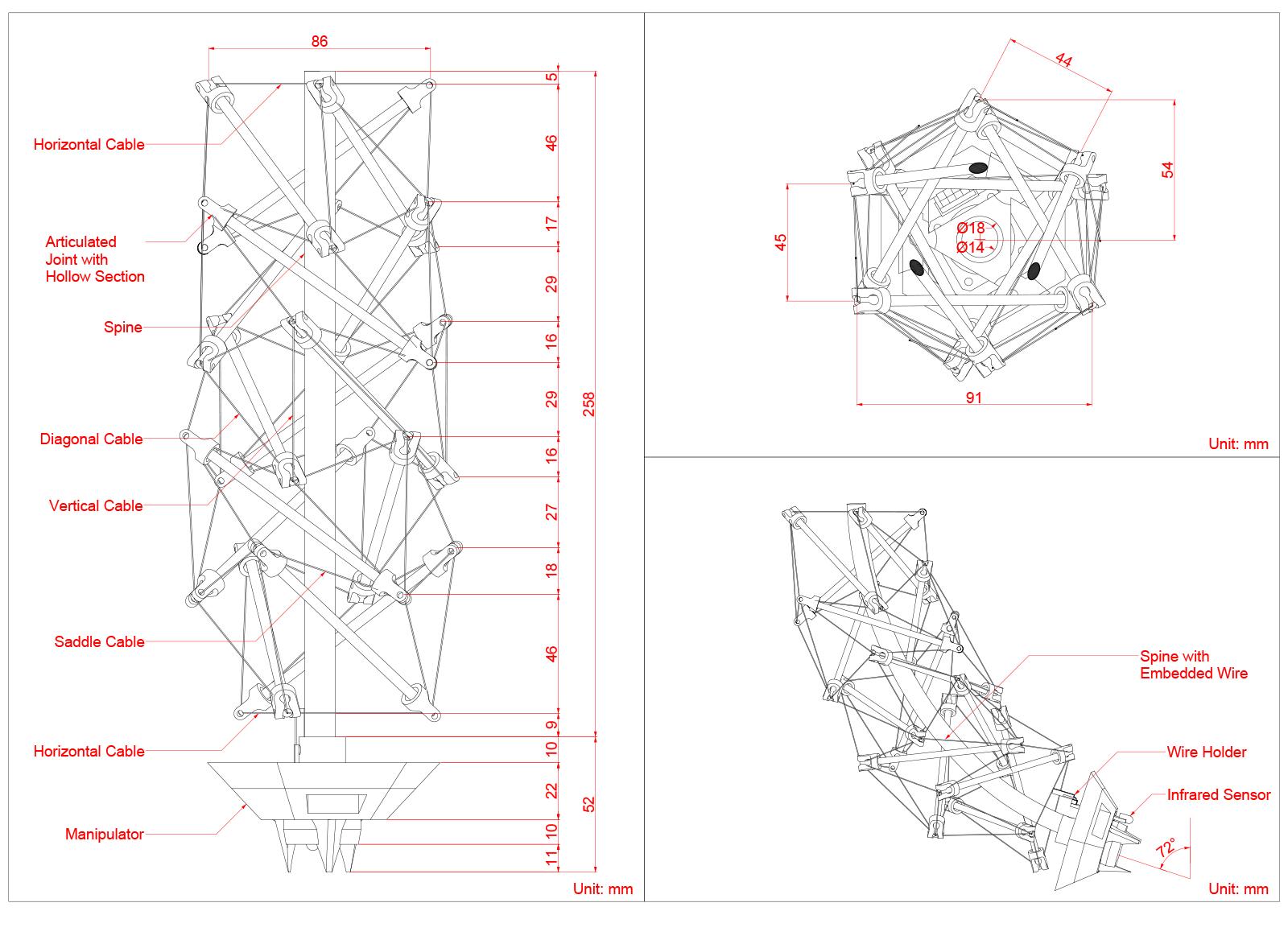
To imitate the biological system based on tensegrity structures, the research employs the adaptive force density approach to deal with the form-finding issues. The design starts with the prismatic tensegrity. Through the application of external forces, the structure reconfigures with flexibility, displaying its inherent compliance. By augmenting the form with multiple tensegrity units, a spine-like topology is generated and its deformability is amplified as demonstrated in Figure 2. This robot structure is comprised of triangular plates on both ends, hexagonal plates in the middle, and a rhombic network in a circumferential pattern. The rhombic network allows force distributions to achieve on the primary axis, sharing a similarity with the muscles in vertebrates. The proposed numerical robot model, which can be considered as a “multi-layer” tensegrity structure, is adjustable in dimensions and composition with parametric design process (Figure 3). This provides a customizable foundation and reduces the mechanical complexity of biomimetic robots.
Material
Cable
Rubber Thread
Tube
[Parametric Design]
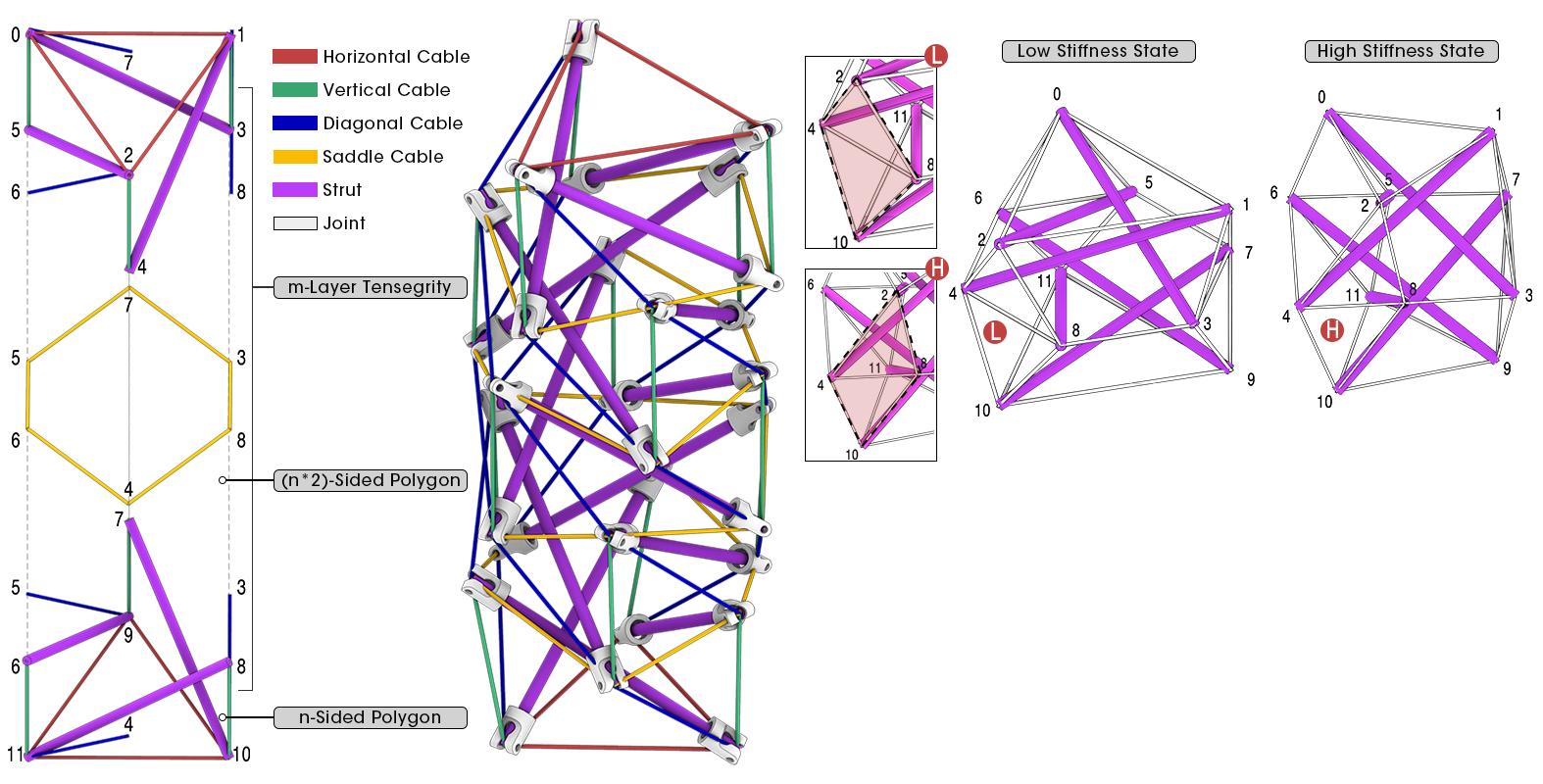
The multi-layer form is comprised of a tensional cable network and a discontinu-ous set of struts, as presented in Figure 3. The tensional network includes four types of cables: horizontal, vertical, diagonal, and saddle cable. The horizontal cables form a n-sided polygon on both ends, and the saddle cables create a (2n)-sided polygon in the middle (n∈N and n ≥ 3). The vertical and diagonal cables establish the interlayer links. The number of layers (m) can be considered as (3p+3), where p∈N, as shown in Table 1.
Horizontal Cables
Figure 3. Introduction of the multi-layer tensegrity structure (a) structural composition (b) rhombic transition with different stiffness (c) material selection Location
0-1, 1-2, 2-9, 9-10,10-11, 11-0
Saddle Cables
Middle
3-8, 8-4, 4-6, 6-5, 5-7, 7-3
Vertical Cables
Interlayer
0-5, 1-3, 2-4, 6-11, 7-9, 8-10
m = 3, 6, 9, …, 3p+3, where p∈N h = 2n
Diagonal Cables
Interlayer
0-6, 1-7, 2-8, 3-9, 4-10, 5-11
s = 2n(m-2) v = n(m-1) d = n(m-1)
Table 1. Parametric design of basic multi-layer (n=3) tensegrity robot body (refer to Figure 3. for numbers in the “order” row)
(c)
(b)
(a)
Carbon Fiber
Strut
PVC Pipe Spine Dyneema Thread Actuator
[Rigid-Flex Coupling and Compliant Mechanism]
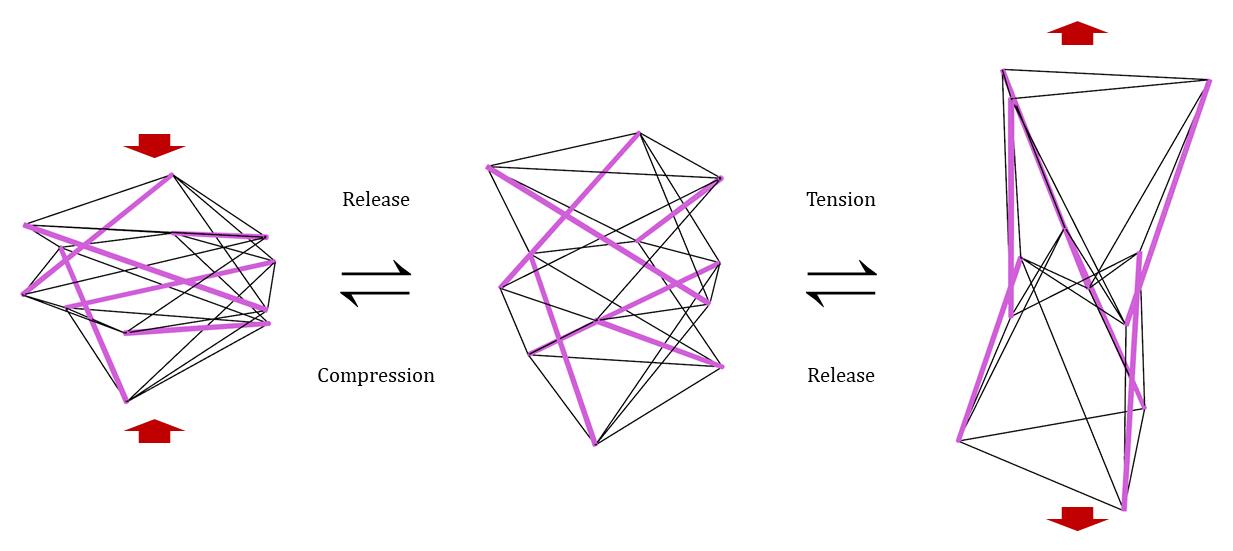
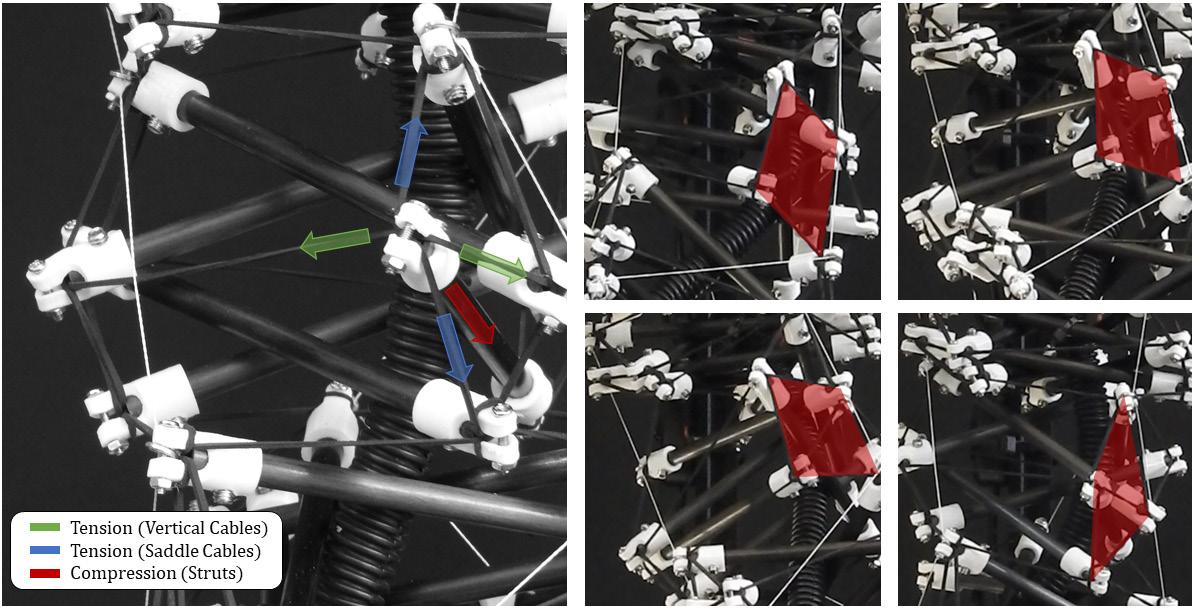
In terms of structural performance, this tensegrity-based form provides high compliance, flexibility, control efficiency, and effective force distribution with a self-balancing mechanism. To achieve these capabilities in real-world situations, we developed a rigid-flex coupling joint (FIgure 4) that allows tension and compression components to synergize effectively. Once applied with external forces, this tensegrity-based structure was able to undergo stress distribution and thus transitioning to a new self-equilibrium state (Figure 5), which is similar to how muscles and bones synergize to switch configurations,
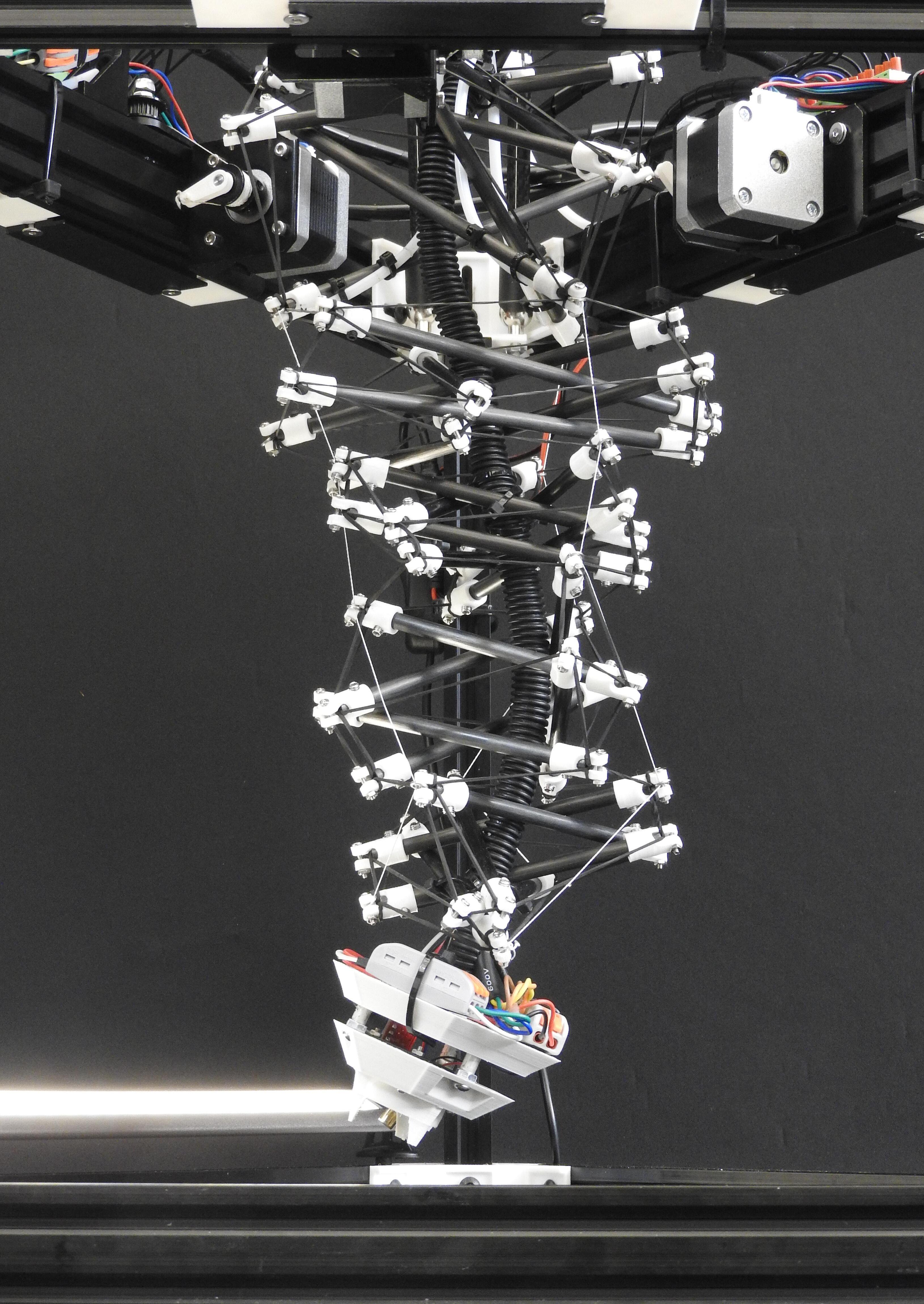
Figure 6. Detail drawing of the proposed
Figure 4.Diagram (left) and flowchart (right) of tensegrity-based compliant mechanism
(a)
(b)
(c)
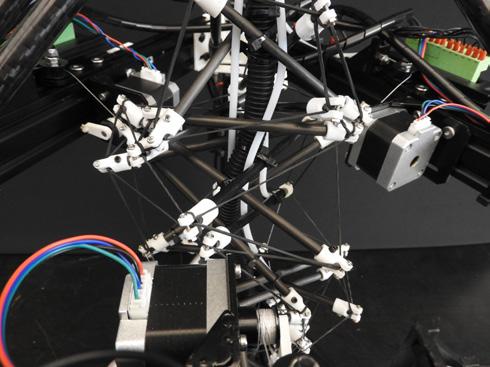
Figure 5. Detailed photo of rigid-flex coupling design and structural behavior
Robot Implementation
[Prototype]
The research takes the six-layer (m=6) tensegrity with three-sided polygon (n=3) morphology generated from the parametric rules as the overall demonstration shown in Figure 6.
[Efficient
Control]
This control strategy using compliant mechanism ensures the robot to achieve various movements with only 3 external cables in this case. It does not require complex mechanical setups at each joint, which is a relatively efficient method compared to traditional robots.
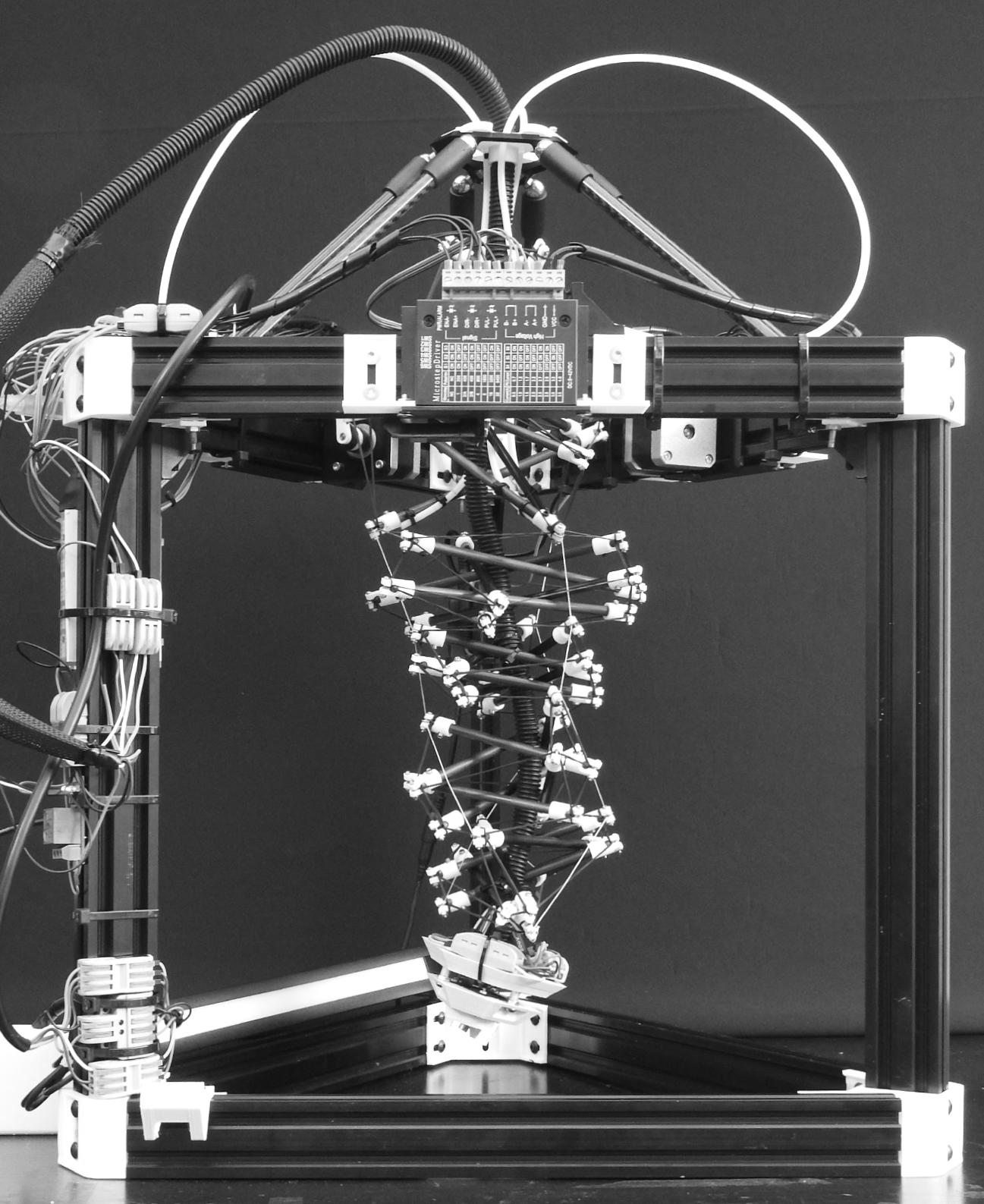
[Integrated Mechatronic System]
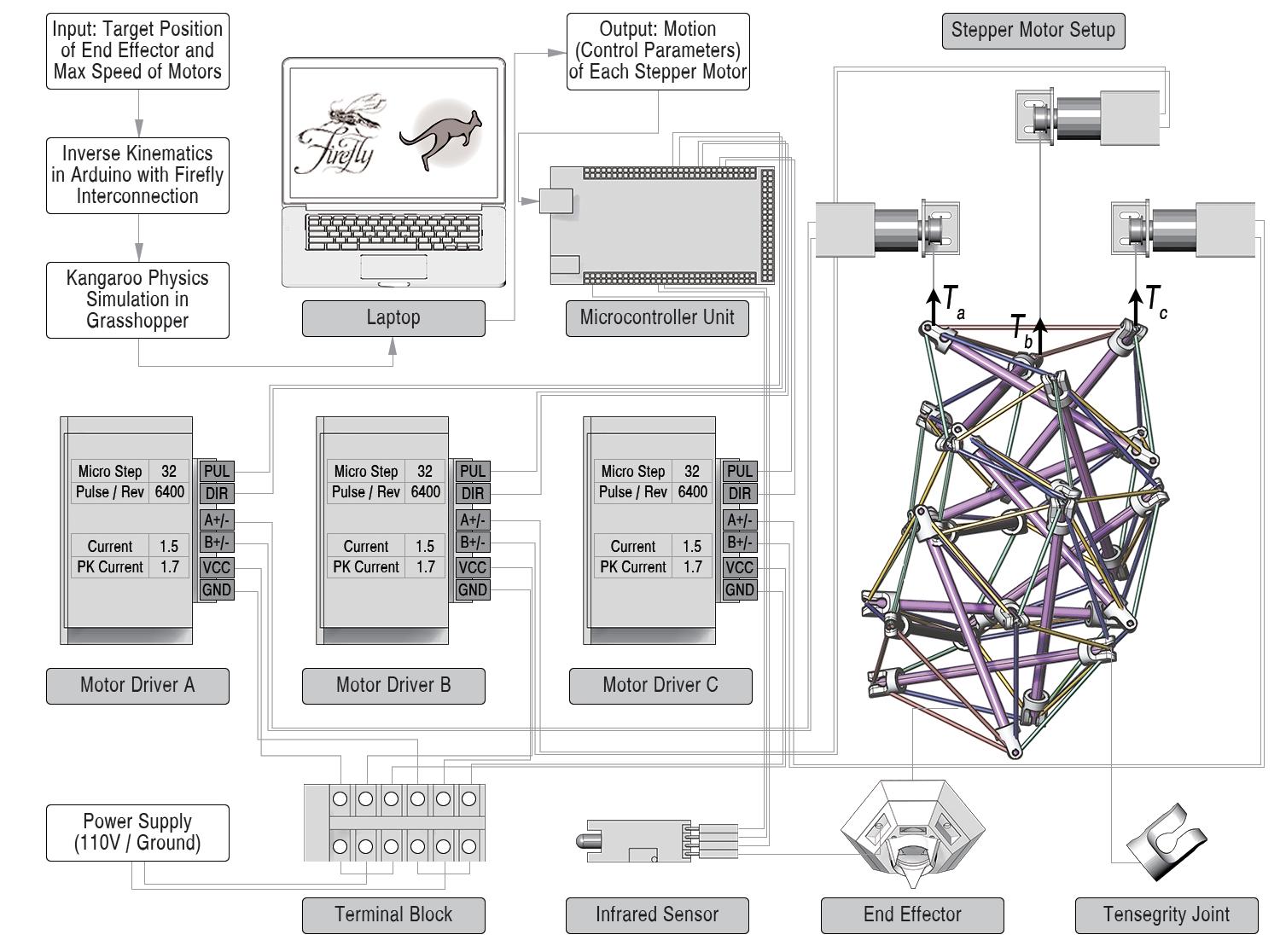
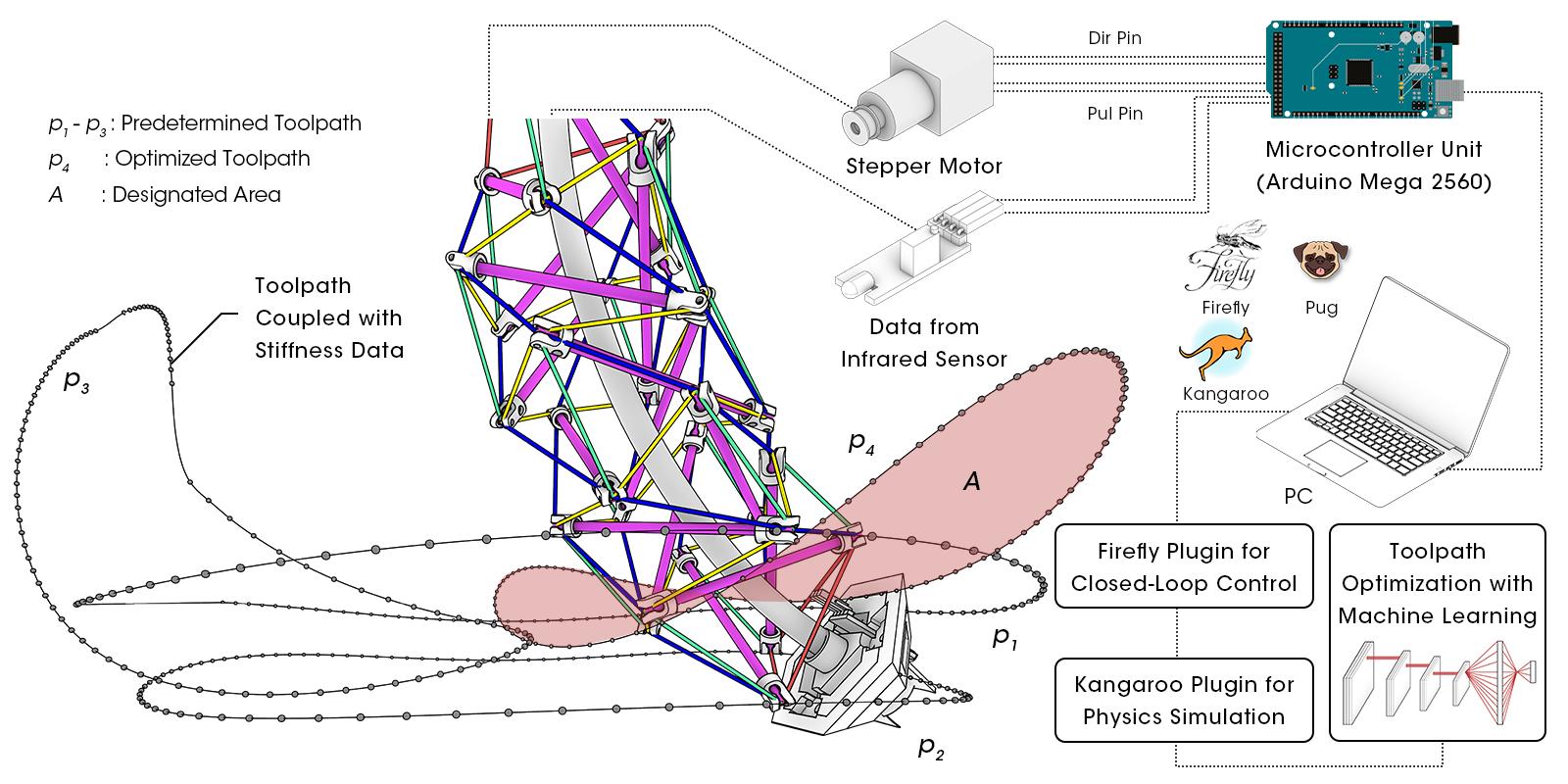
As demonstrated in Figure 7 and 8, the research presents an integrated mechatronic system, including parametric control, real-time simulations, and mechanical actuation, to employ the tensegrity-based compliant mechanism. The robot is controlled by a stepper motor set linked to the computational tools, ensuring distributed cooperative control. Using inverse kinematics and delta robotics, the software platform can calculate the control parameters of each motor to achieve the desired position or configuration. The software toolkit, based on Kangaroo and Firefly in Grasshopper, can conduct real-time simulations according to these control parameters and thus establish relationships between current robot configurations and corresponding data from the actuator (Figure 9).
To enhance the trajectory tracking capabilities and other related performance, the entire framework employs a closed-loop control strategy, connecting controller to an infrared sensor. By entering the thermal property of the target, the proposed robot can track the objective and moves adaptively to achieve the trajectory by using the relationship data collected previously. This approach optimizes dexterous mobility and inherent compliance of the tensegrity-based robot body. In addition, equipped with various sensors on the end effector, the robot can be triggered by diverse types of data to fit in its current environment.
Figure 7. Tensegrity-based compliant mechanism with mechatronic control system (Grasshopper / Arduino)
[Configurations to Movement]
Previous State
Physics Simulations
Grasshopper
Computation
Synchronization Arduino Sensor
Inverse Kinematics
Microcontroller Unit
Robotic Operation
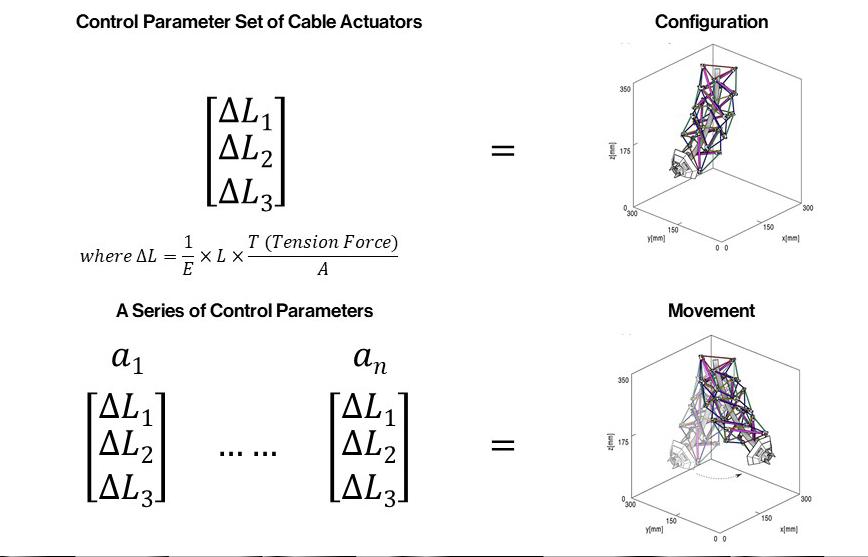
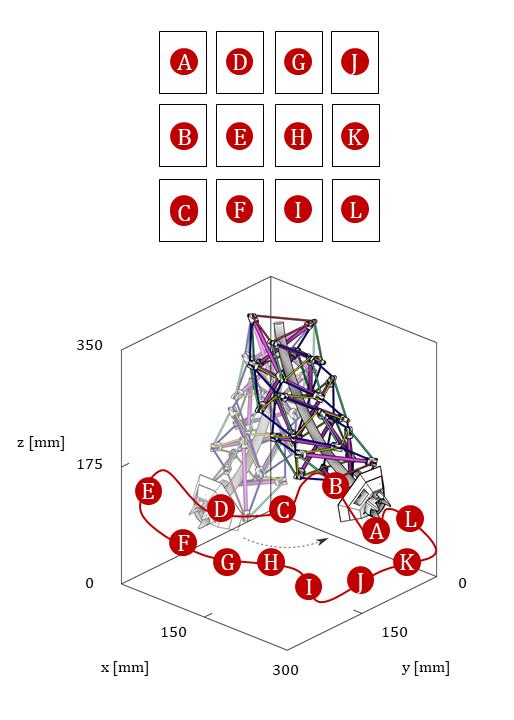
Basically, each control parameter set of external tensile actuators corresponds to a specific configuration. A collection of parameters could eventually be converted into a continuous movement (Figure 10), which is the way to manipulate the robot structure in both computational and physical environments in this research.
Figure 10. Introduction of the control method
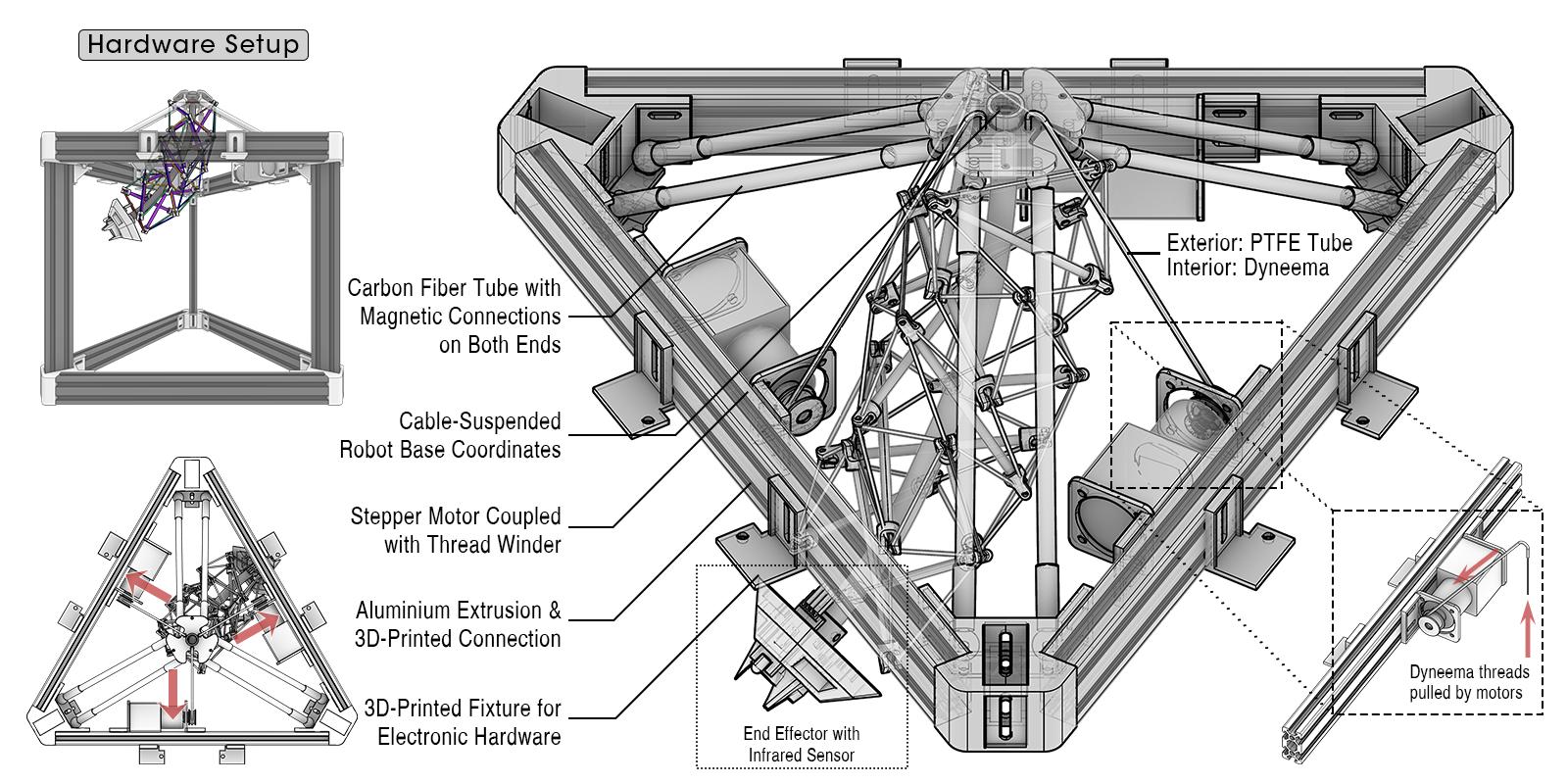
Figure 8. Hardware setup of the mechatronic control system
Figure 9. Integration of robotic framework
Figure 11. Toolpath
[Kinematic Performance]
Experimental Result
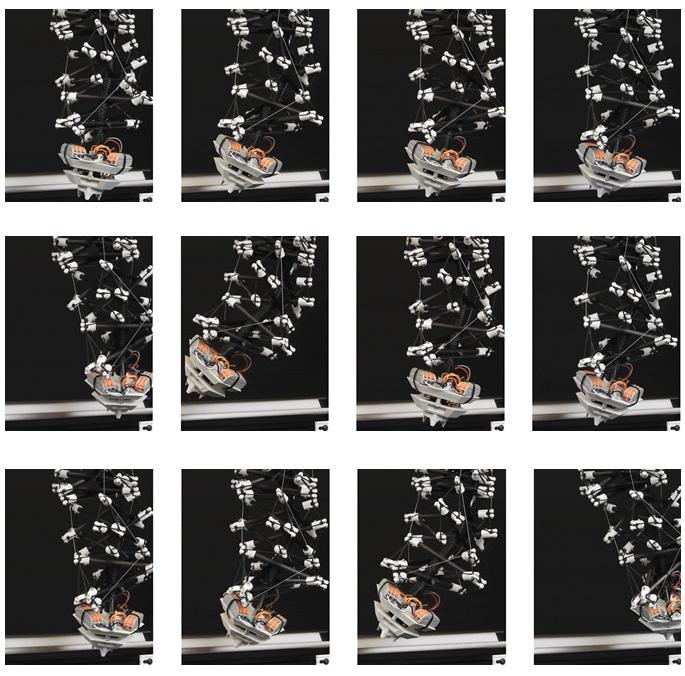
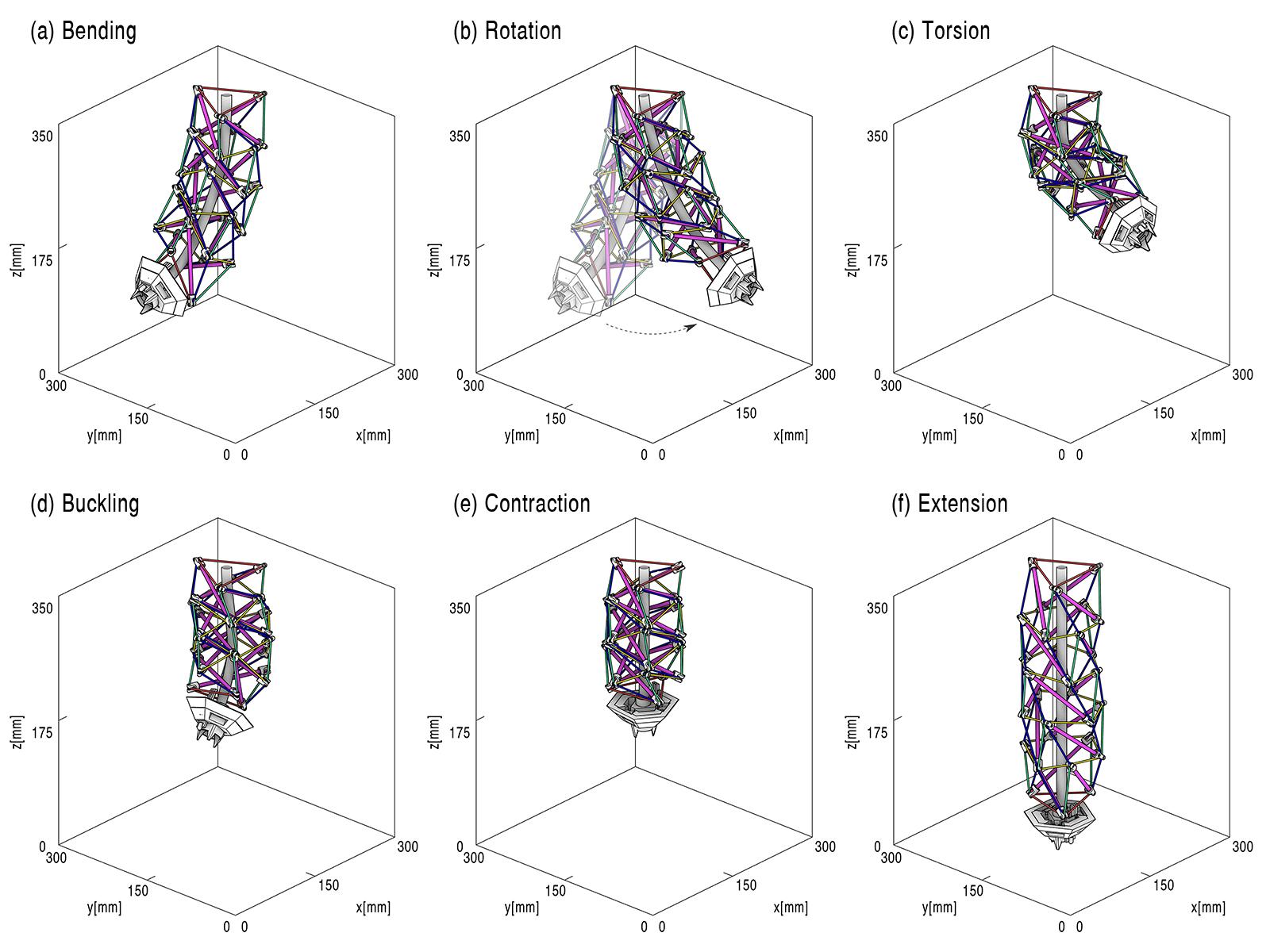
The experimental results showcased the robot’s proficiency in both multidirectional and unidirectional movements (Figure 12). Most importantly, the combination of different motions enabled the robot to perform more complex movements, such as rotation combined with torsion, contraction plus bending, etc.
[Versatile Movements]
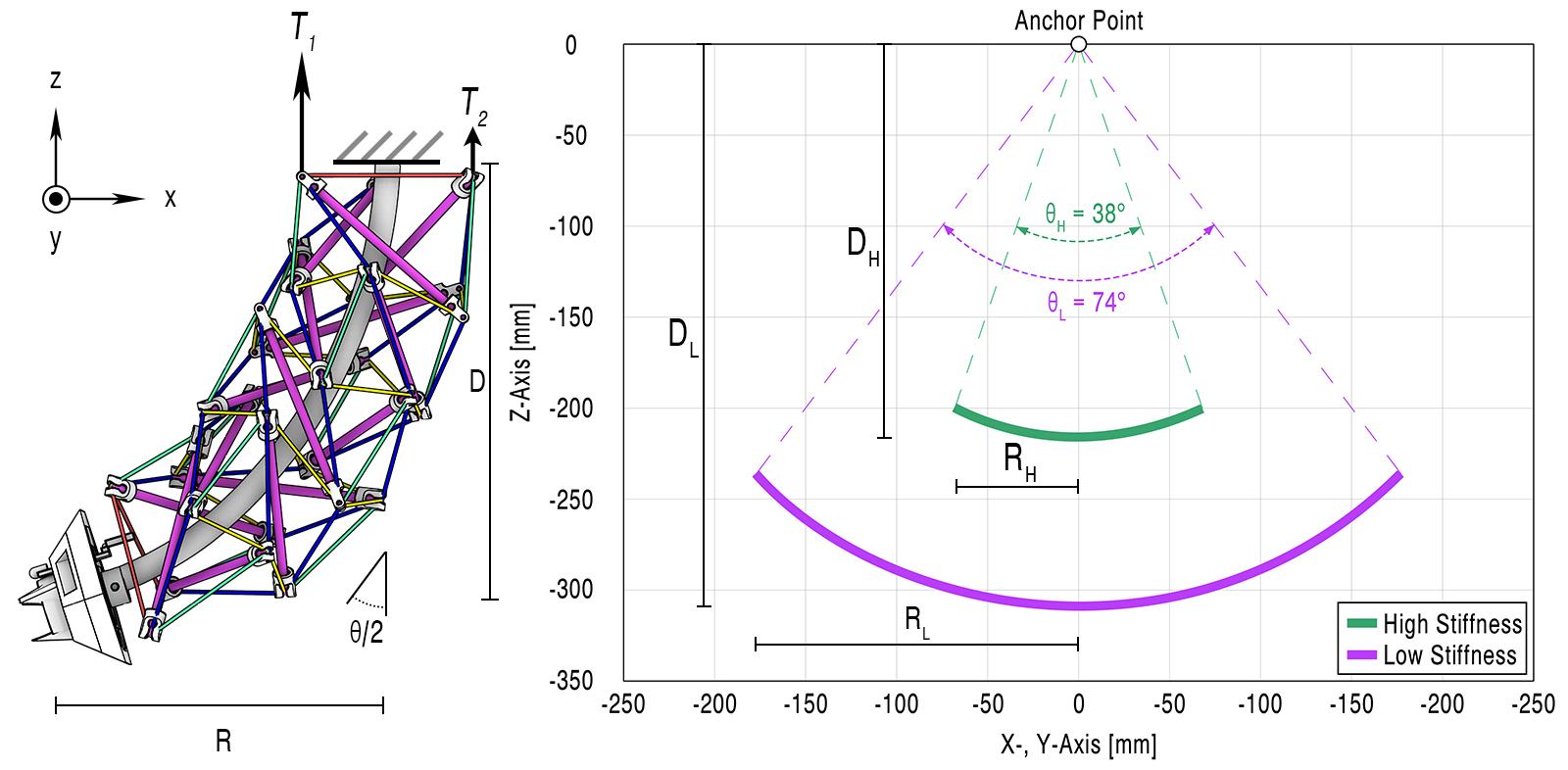
The research findings demonstrated that by adjusting the control parameters within an appropriate domain, its stiffness and range of motions could be manipulated (Figure 13). This dexterity in switching dynamics provided more control efficiency and environmental adaptability, leveraging the advantages of both rigid and soft structures.
Figure 12. Kinematic performance of the tensegrity-based robot
Figure 13. Range of motions with different stiffness (H: high stiffness state. L: low stiffness state)
(a) Bending
(d) Buckling
(b) Rotation
(e) Contraction
(c) Torsion
(f) Extension
[Potential in Unstructured Spaces]
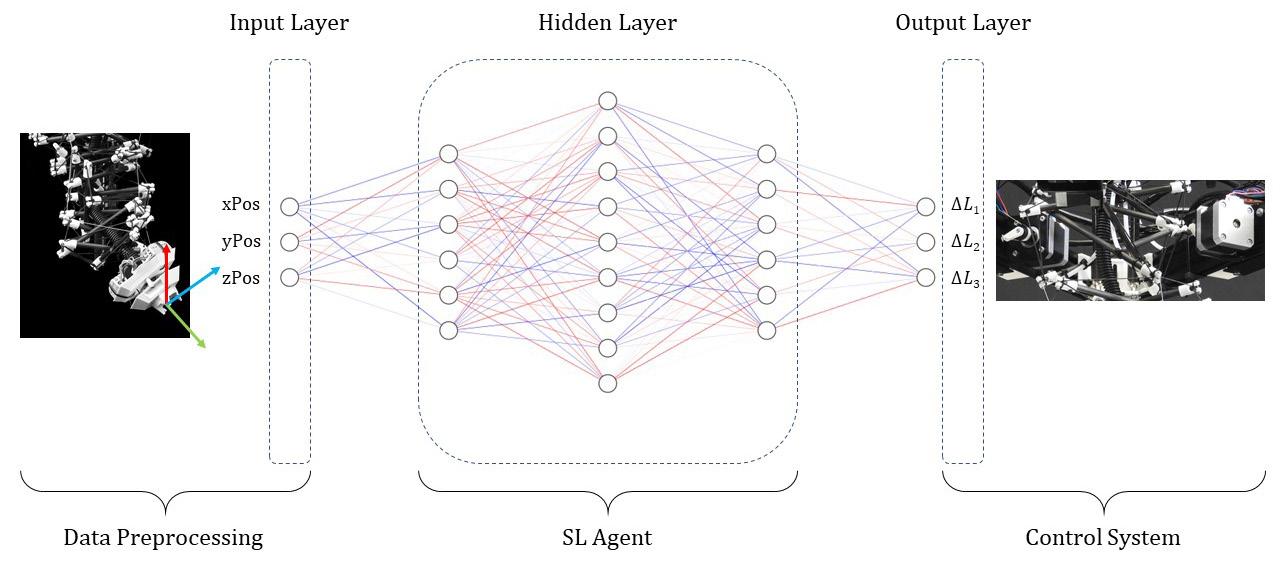
The research utilized the supervised learning approach (Figure 14-16) so that the robot could gradually achieve biomimetic movements with an efficient control strategy. This integrated enhancement also provided robot’s safety and adaptability when navigating through unstructured or unfamiliar spaces.
Predetermined Toolpath
Angular Position of Motor
Pitch / Yaw / Roll Angle
Training Output
Neural Network (ML) Corresponding Training Input
[Training Result]
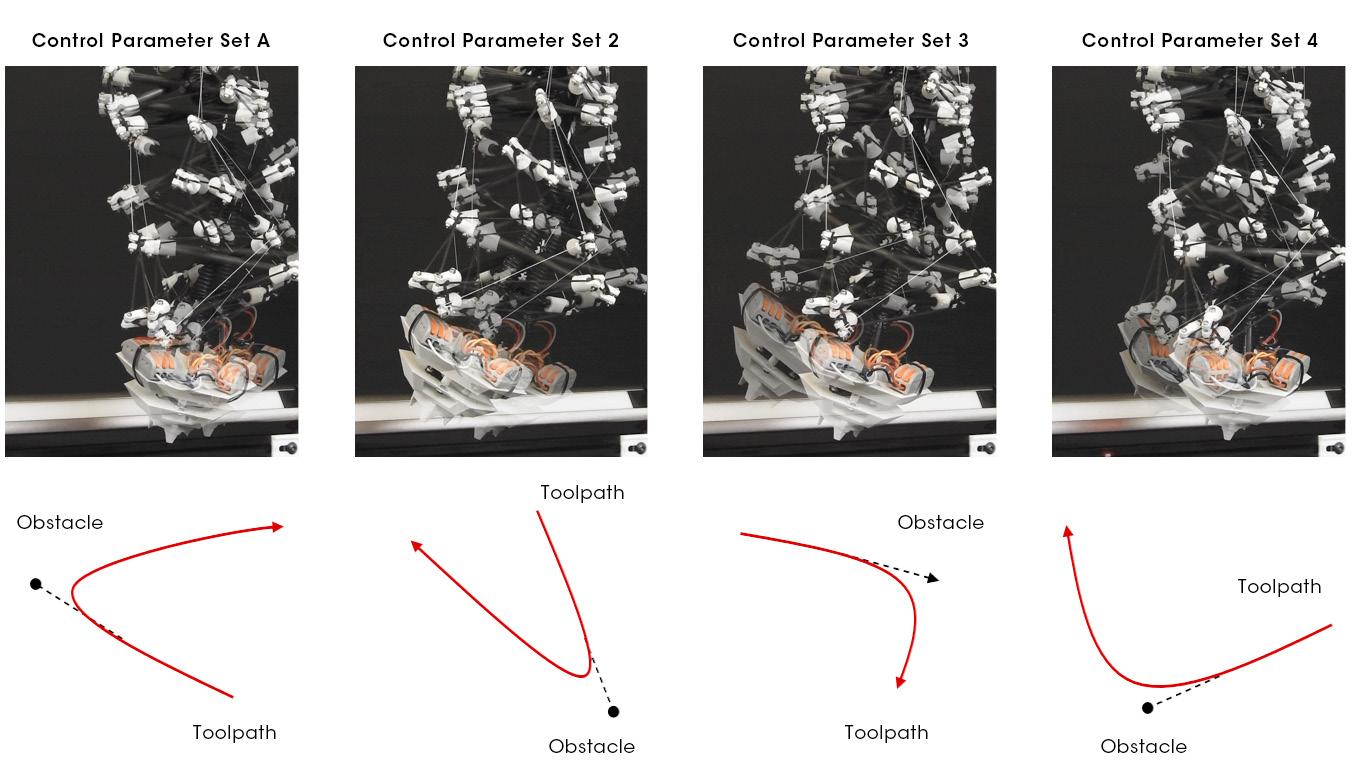
With each training iteration, the robot progressively acquired the capability for biomimetic locomotion. It can conform to obstacles or environmental changes simply by adjusting its stiffness (Figure 17). Promisingly, these versatile movements could be achieved with less mechanical complexity (model-free control strategy) comparing to existing robotic techniques.
Figure 14. From model-based to model-free control strategy for biomimetic robots
Figure 15. Supervised learning for optimal control
Figure 16. Training framework
Figure 17. Demonstration of environmental adaptability
Contribution and Limitation
[Intrinsic Material Properties]
This research introduced a biomimetic solution that provides versatile movements, adaptability, and more efficient control, in order to explore robotic operations in unstructured spaces. Additionally, a few limitations were found. Intrinsic material properties, such as time-dependent prestress loss of cables and friction between components, might cause deviations, which require careful consideration for further applications (Figure 18).
Design Framework of Tensegrity-Based Robots for Advanced Fabrication
Biomimetic Form Robot Implementation
Numerical Tensegrity Compliant Mechanism Various Configurations
Rigid-Flex Coupling Physics Simulations Mechantronic System
Kinematic Evaluation
Versatile Movements A Wide Range of Motions Adaptive Stiffness
[Future Applications]
Limitations
(a) Cable Relaxation from time-dependent pre-stress loss
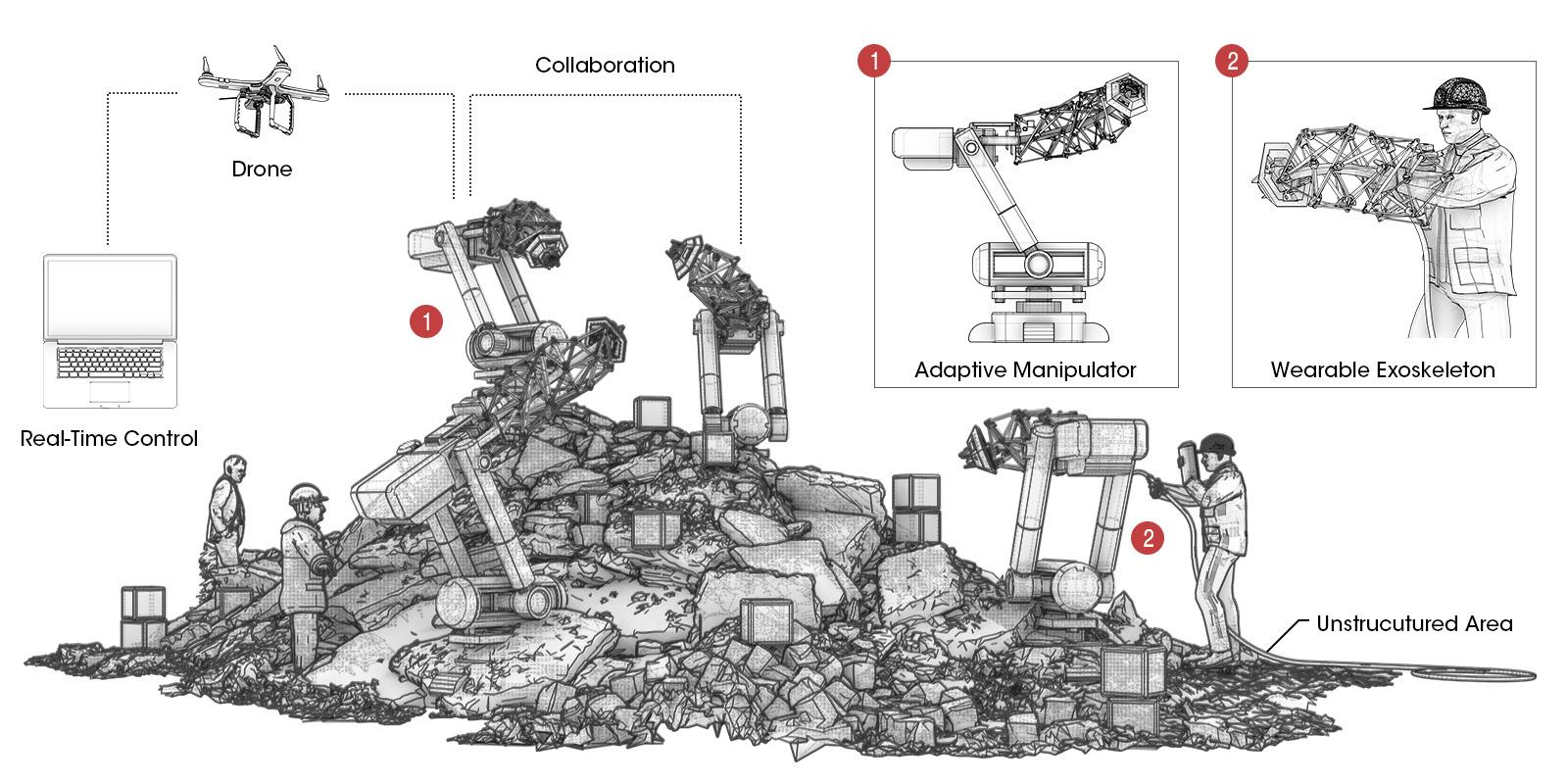
The kinematic advantage of this prototype could benefit robotic operations in confined spaces, with potential applications extended to digital fabrication and structural engineering as well (Figure 19), such as biomimetic 3D-printing technology or biomimicry building enclosures.
(b) Friction
Figure 19. Potential applications in structural engineering and robotic operations
Figure 18. Contribution and limitation of the proposed system
Comparative Analysis of Learning Models for Bionic Robots
This research evaluates machine learning models for optimizing control of bionic robots
[Instructor]
June-Hao Hou
[Publication]
Full-Paper Accepted by ISPACS 2024 (Conference Proceedings)
Available at: https://doi.org/10.48550/arXiv.2407.02428
[Research Type]
Independent Design Research
[Project Year]
2024
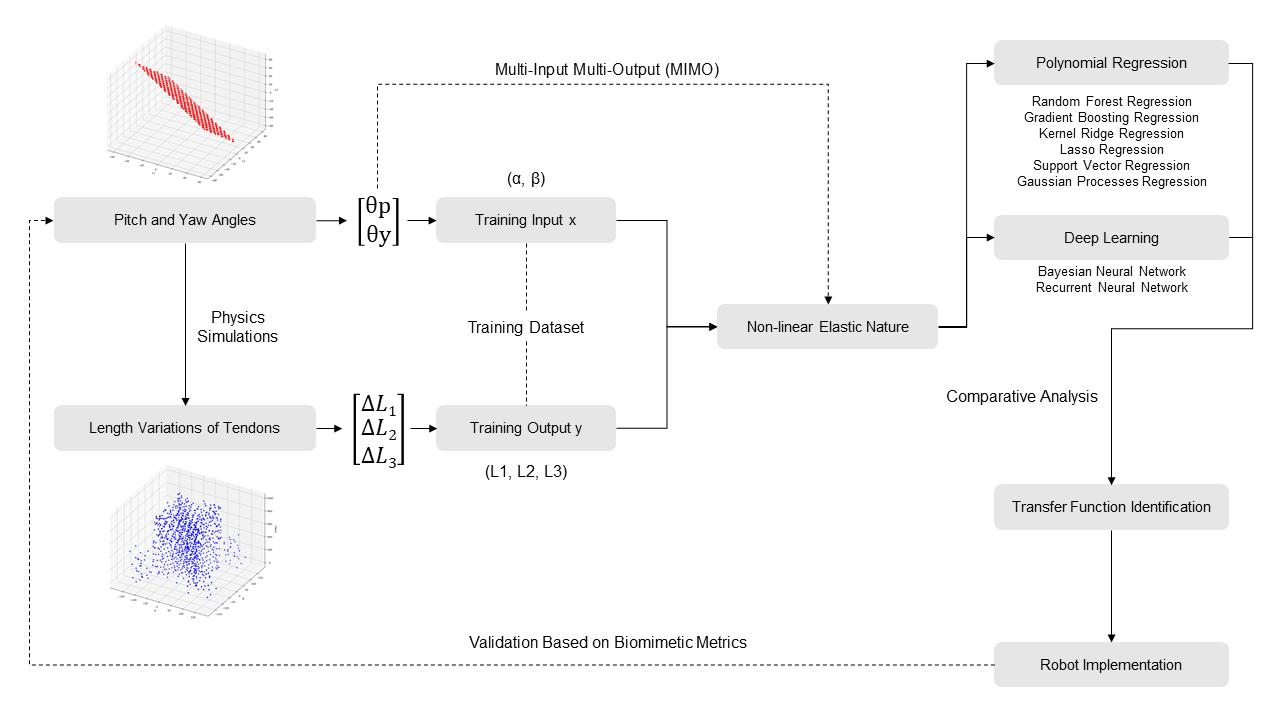
The control and modeling of bionic robot dynamics have increasingly adopted model-free control strategies using machine learning methods. Given the non-linear elastic nature of bionic robotic systems, learning-based methods provide reliable alternatives by utilizing numerical data to establish a direct mapping from actuation inputs to robot trajectories without complex kinematics models. However, for developers, the method of identifying an appropriate learning model for their specific bionic robots and further constructing the transfer function has not been thoroughly discussed. Thus, this research trains four types of models, including ensemble learning models, regularization-based models, kernel-based models, and neural network models, suitable for multi-input multi-output (MIMO) data and non-linear transfer function identification, in order to evaluate their (1) accuracy, (2) computation complexity, and (3) performance of capturing biological movements. This research encompasses data collection methods for control inputs and action outputs, selection of machine learning models, comparative analysis of training results, and transfer function identifications. The main objective is to provide a comprehensive evaluation strategy and framework for the application of model-free control.
[Model-Free Control]
Research Problem
Since the model-free method for the control of bionic robots is a relatively new field, the method of identifying an appropriate learning model for each specific robot and constructing transfer functions precisely have not been thoroughly discussed.
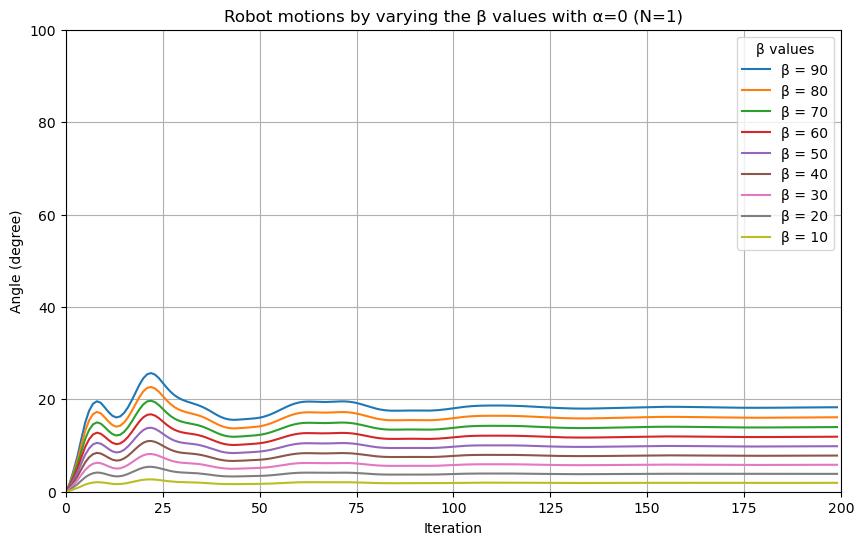
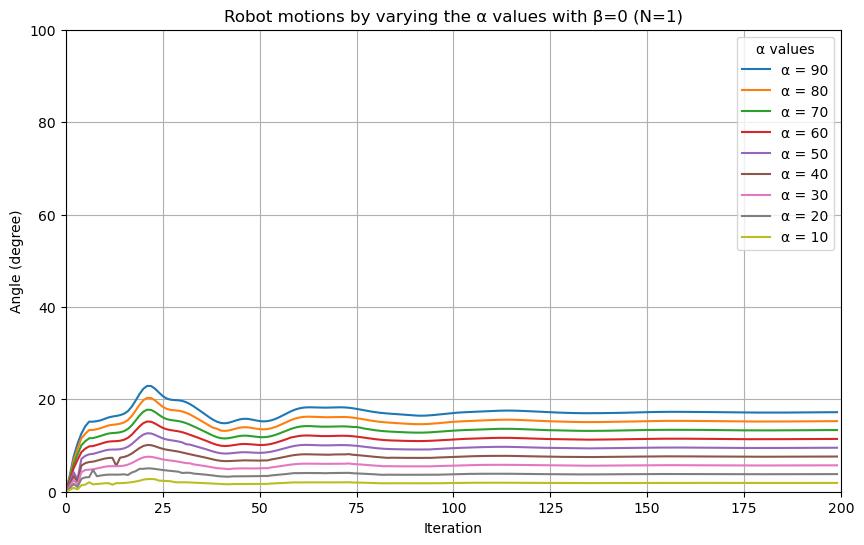
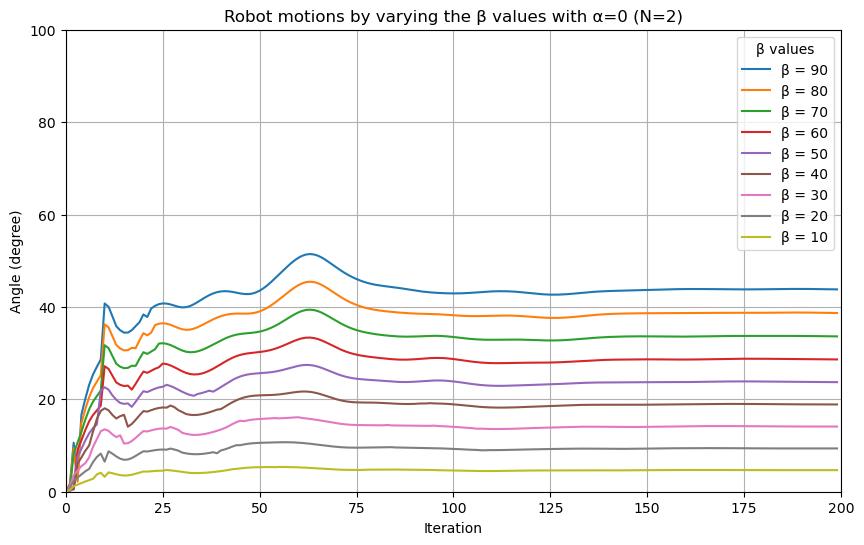
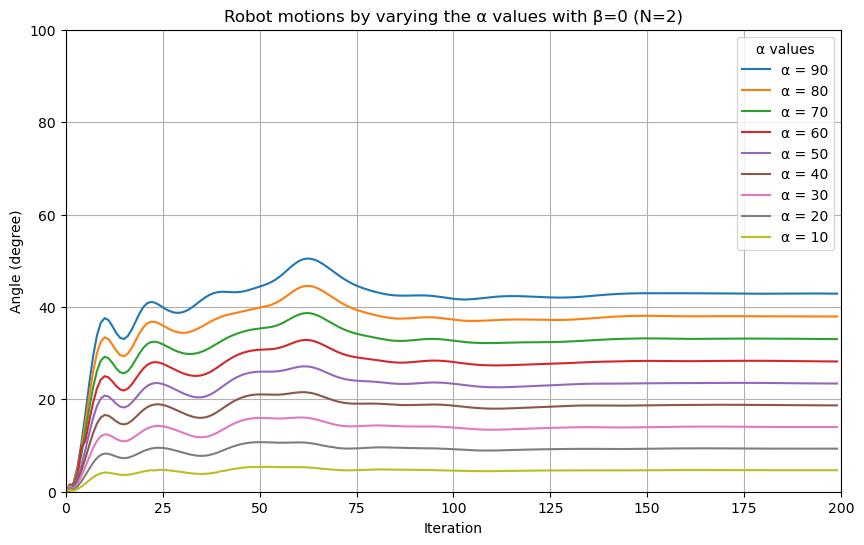
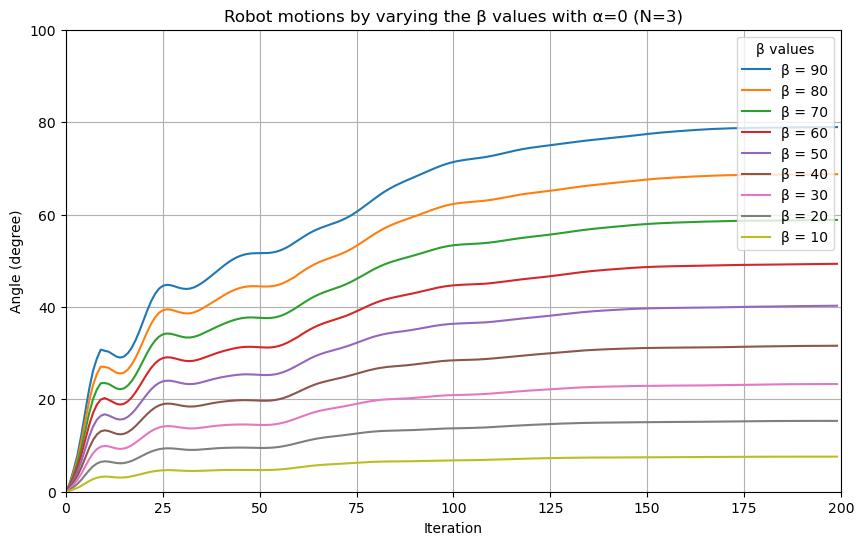
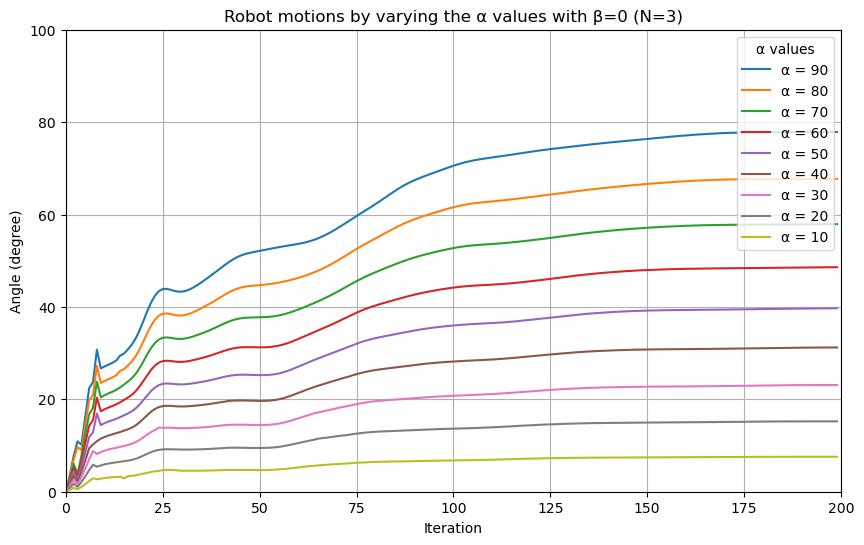
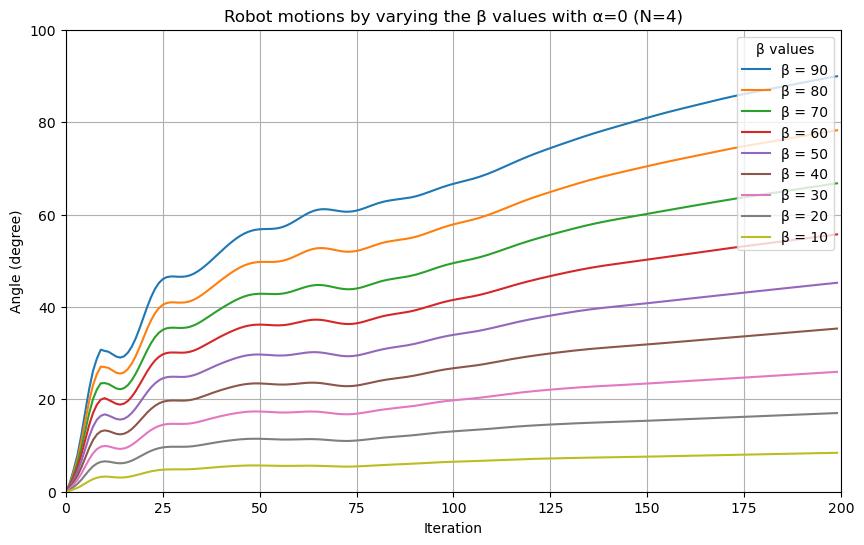
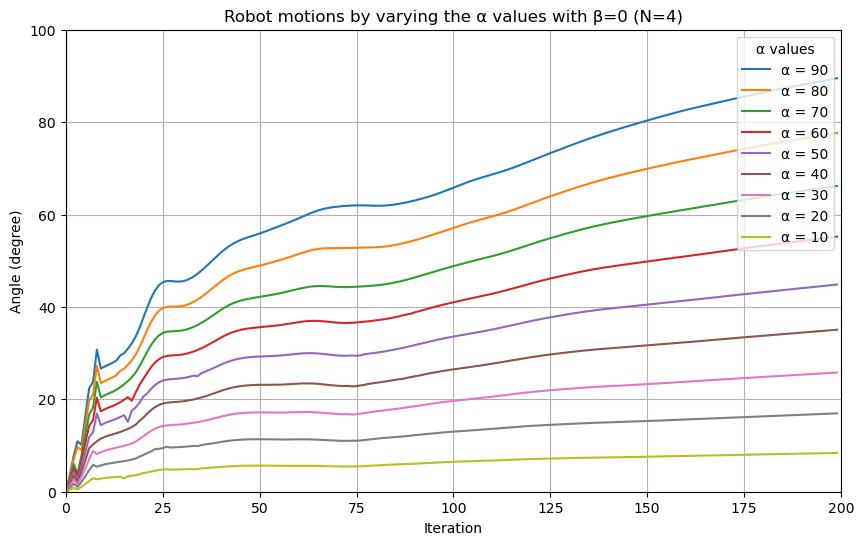
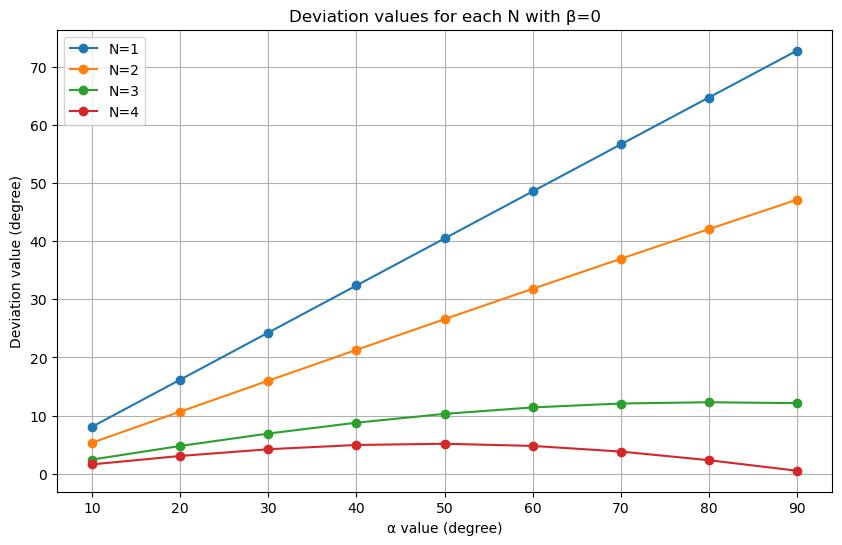
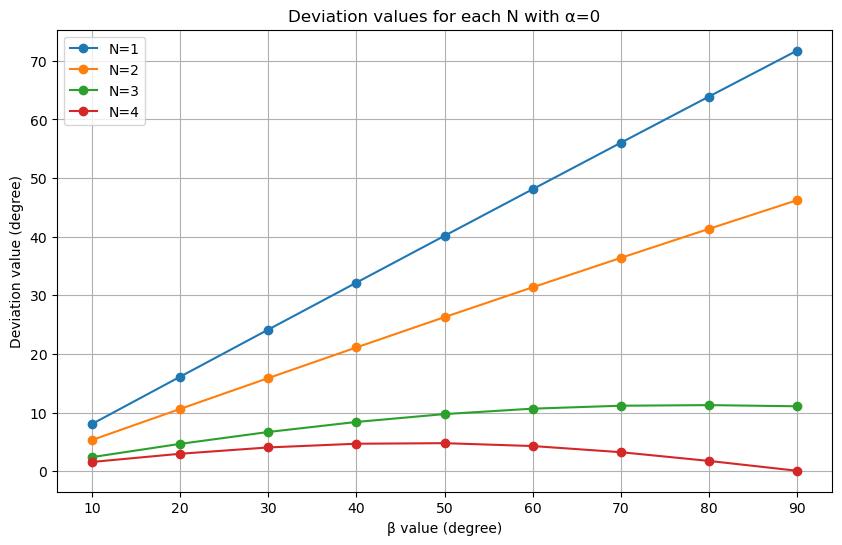
In this case (tensegrity-based continuum robot with fractional order control algorithm), the performance experiment is conducted by inserting a series of target yaw and pitch angles from -90° to 90° at an interval of 10, and collecting the length variation values of each tendon actuator (Figure 1-4). The evaluation of yaw and pitch movements are divided into two seperate processes, which means that the simulation inputs α (yaw angle) and β (pitch angle) are non-zero and zero value alternatively. This allows the vertical and horizontal movements to be clearly viewed seperately. Four conditions with different number of segments (N=1, 2, 3, 4) are selected as the subjects to test out the impact of value N on the actual movements. A noticeable deviation between the actual and desired motions was observed (Figure 5-6). These discrepancies indicate that the original transfer functions are not fully adequate for capturing the non-linear dynamics of the bionic tendon-driven robot. To address this issue, this research explore the use of machine learning models to derive more accurate and robust transfer functions.
over time
Figure 1. Actual motions with N = 1
= 1
over time
over time
Figure 2. Actual motions with N = 2
= 2
Figure 3. Actual motions with N = 3
= 3
over time
Figure 4. Actual motions with N = 4
= 4
The proposed research methodology is comprised of four principal phases (Figure 7). In the preliminary phase, data collection is conducted using physics simulations to capture robotic motions (yaw and pitch angles) and corresponding actuation parameters (length variations of each tendon). Subsequently, eight different learning models suitable for non-linear data are selected and trained with the dataset. A comparative analysis is then conducted to evaluate the performance of each model, including accuracy and computation costs. Eventually, the transfer functions derived from each learning model are sent back to the robot simulation to validate the actual locomotion based on biomimetic metrics.
[Data Collection]
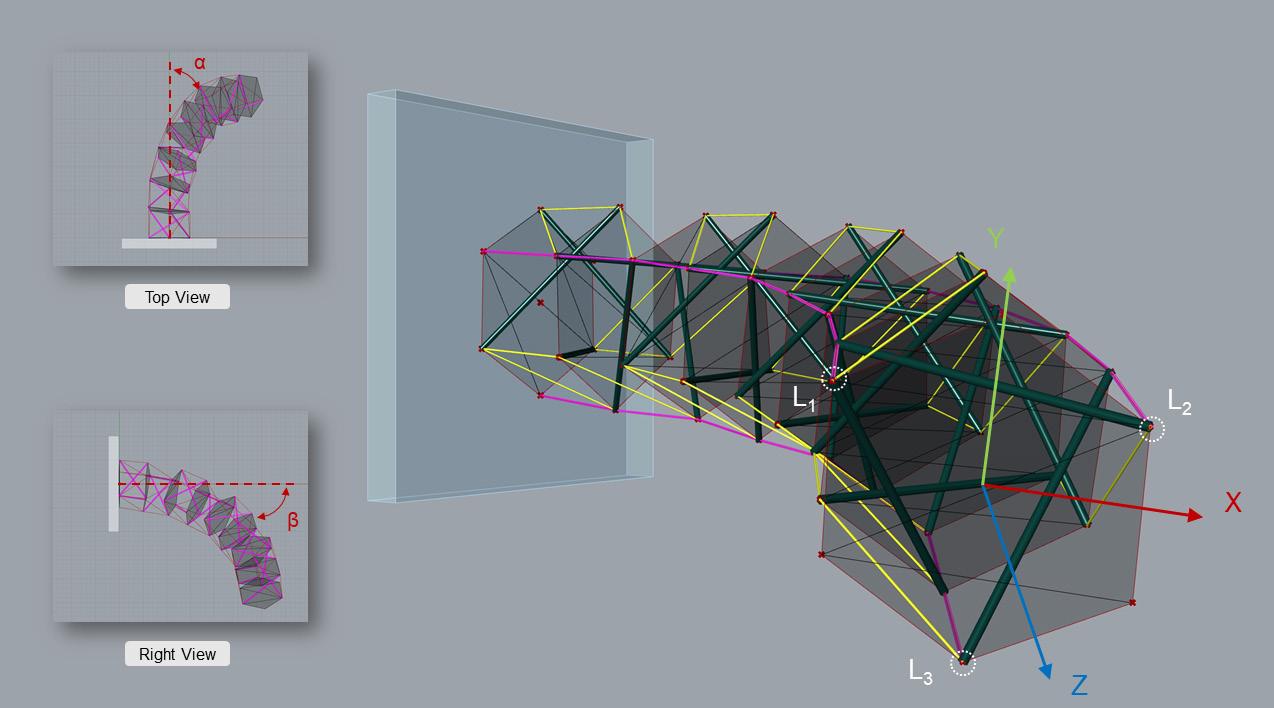
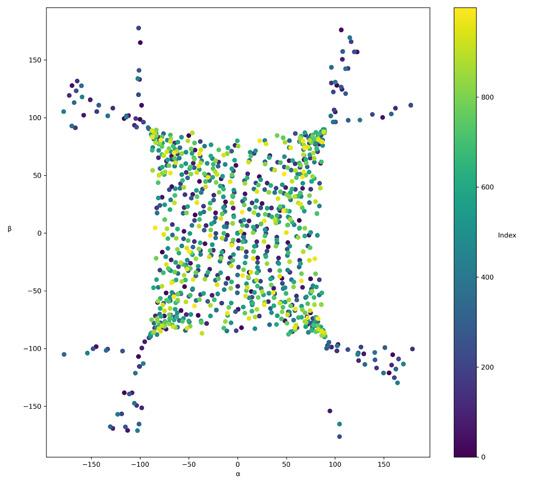
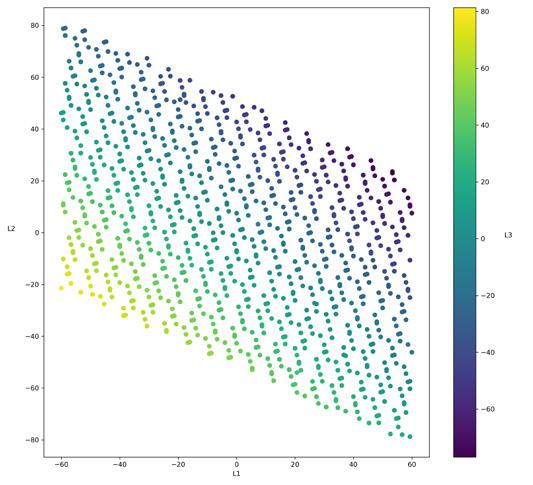
The training dataset for this research was constructed to capture the complex dynamics (in full range of possible motions) of a bionic tendon-driven robot in a multi-input multi-output (MIMO) condition. The data collection process involved simulating various pitch (α) and yaw (β) angles (Figure 8(a)) and recording the corresponding variations in tendon lengths L1, L2, L3 ((Figure 8(b)). To ensure the robustness and generalizability of the training dataset, the input angles were varied systematically, and multiple measurements were taken for each angle combination. This approach ensures that the machine learning models trained on this dataset can generalize well to unseen data, thereby enhancing their predictive performance and reliability.
(b)
Figure 6. β deviations (with α = 0)
Figure 7. Methodology
Figure 8. Data collection (a) inputs: pitch and yaw angles
outputs: lengths variations of tendon
Figure 5. α deviations (with β = 0)
Method
(a)
(b)
Boosting Lasso Regression Support Vector RNN
Table 1. Performance metrics of different learning models
Experimental Results
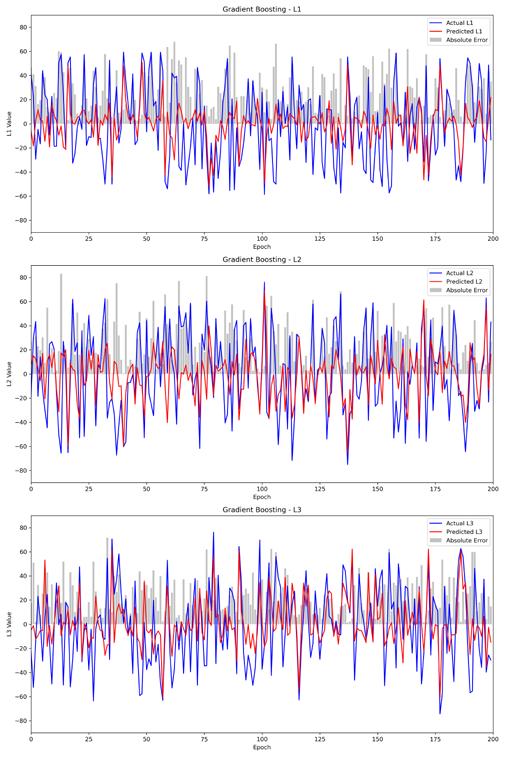
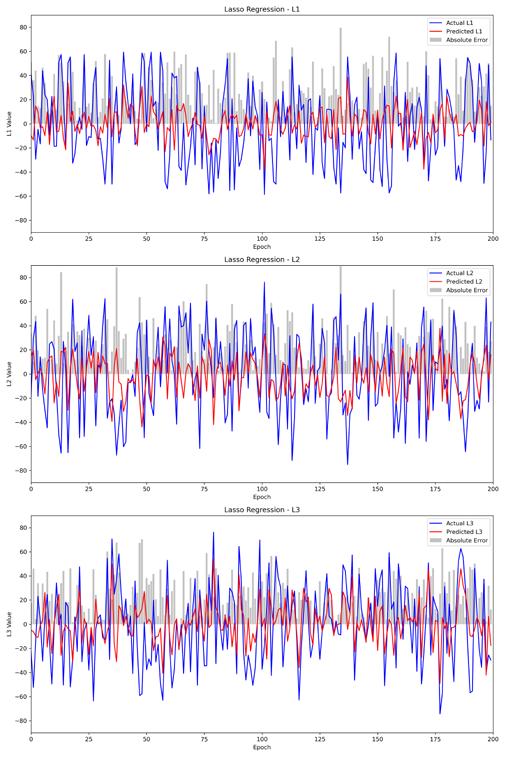
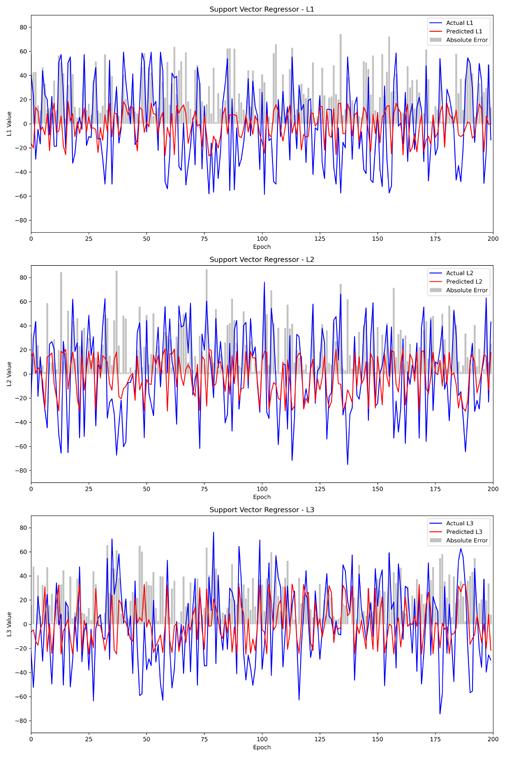
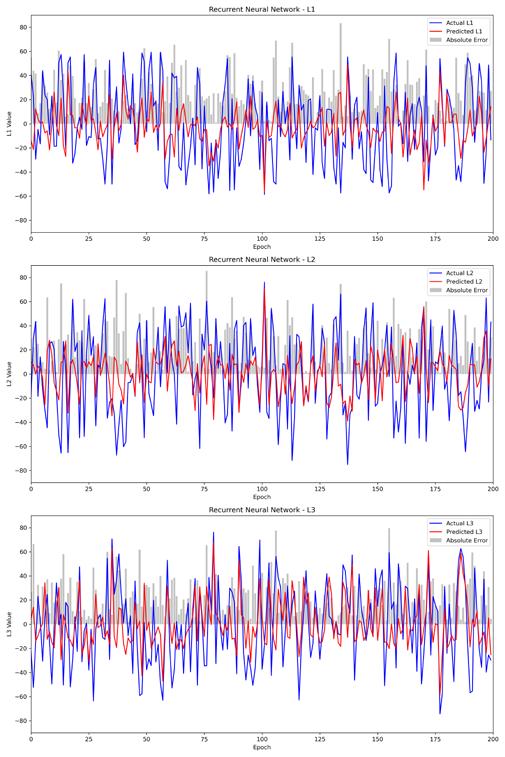
The training process (Figure 9) for each learning model is evaluated by comparing the predicted values (red) against the actual values (blue) for L1, L2, and L3, along with the absolute error (gray) in y-axis. The predictions from gradient boosting model are closely aligned with the actual values, demonstrating the best performance. Table 1 presents an overall performance of each model, including MSE, MAE, and computation time. Despite the lower accuracy, Lasso exhibits noticeably reduced time cost, which is suitable for real-time applications.
Figure 9. Training results (a) gradient boosting (b) lasso regression (c) support vector (d) recurrent neural network
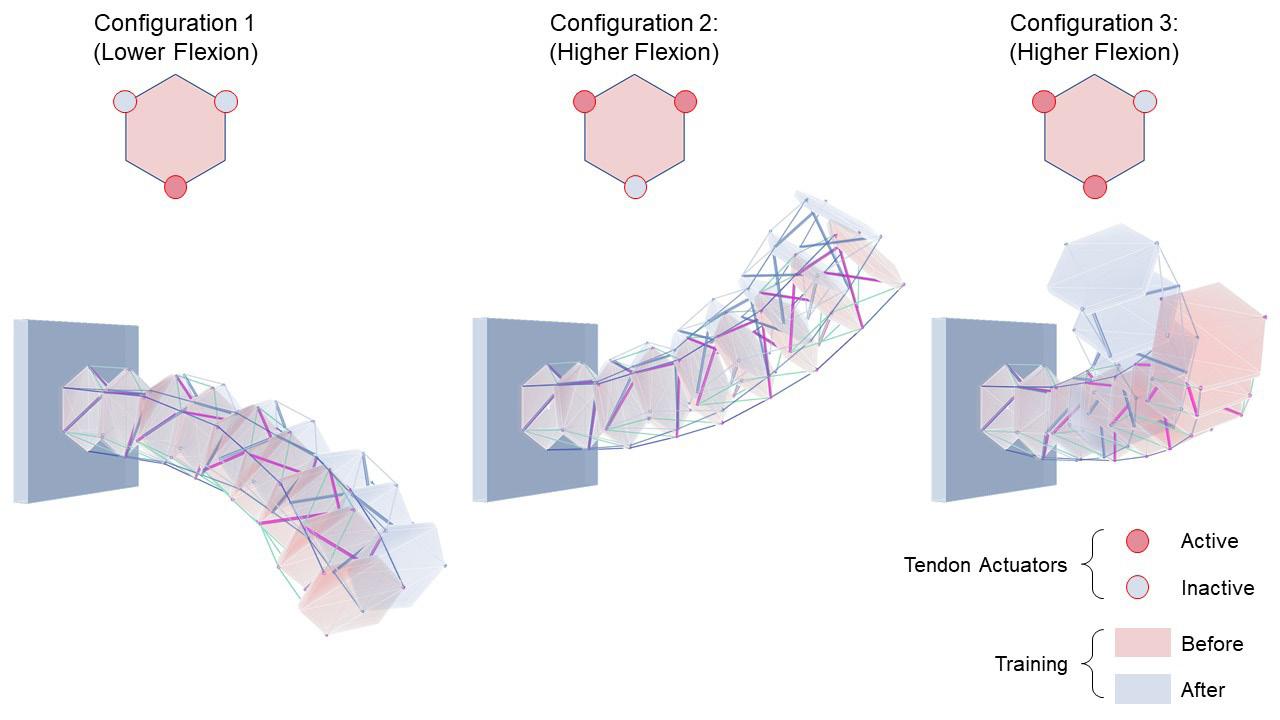
Figure 11. Robot performance before and after training
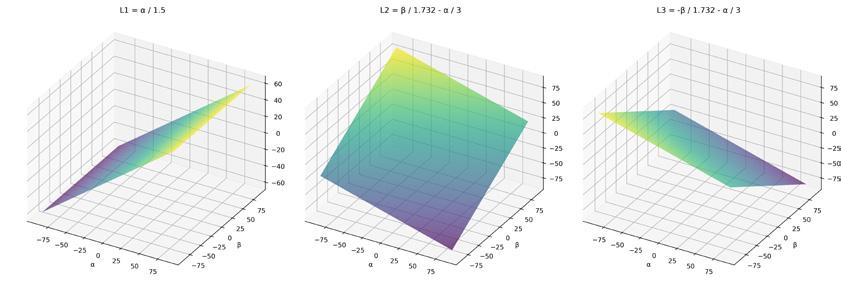
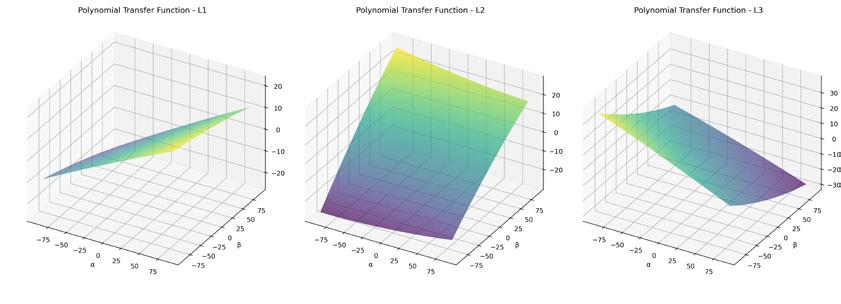
Figure 10. Transfer functions (a) original (b) proposed (a)
(b)
A Multimedia Framework for Continuum Robots: Systematic, Computational, and Control Perspectives
Human-Computer Interaction, System Architecture, Dynamics, Control Strategy
[Project Description]
This research presents a system for designing, simulation and control of continuum robots
[Instructor]
June-Hao Hou
[Publication]
Full-Paper Accepted by ISPACS 2024 (Conference Proceedings)
Available at: https://doi.org/10.48550/arXiv.2409.14708
[Research Type]
Independent Design Research
[Project Year]
2024
Continuum robots, which often rely on interdisciplinary and multimedia collaborations, have been increasingly recognized for their potential to revolutionize the field of human robot interaction (HRI) in varied applications due to their adaptive, responsive, and flexible characteristics.
Despite their promises, the lack of an integrated framework poses significant challenges for both users and developers, resulting in inefficiency and complexity during preliminary developments. Thus, this paper introduces a unified framework for bionic robotics that addresses these challenges by integrating system architecture, dynamics computation, and control strategy. The proposed method allows for efficient modeling and quick preview of the results in both digital and physical environments, which can enhance the quality of robot developments.
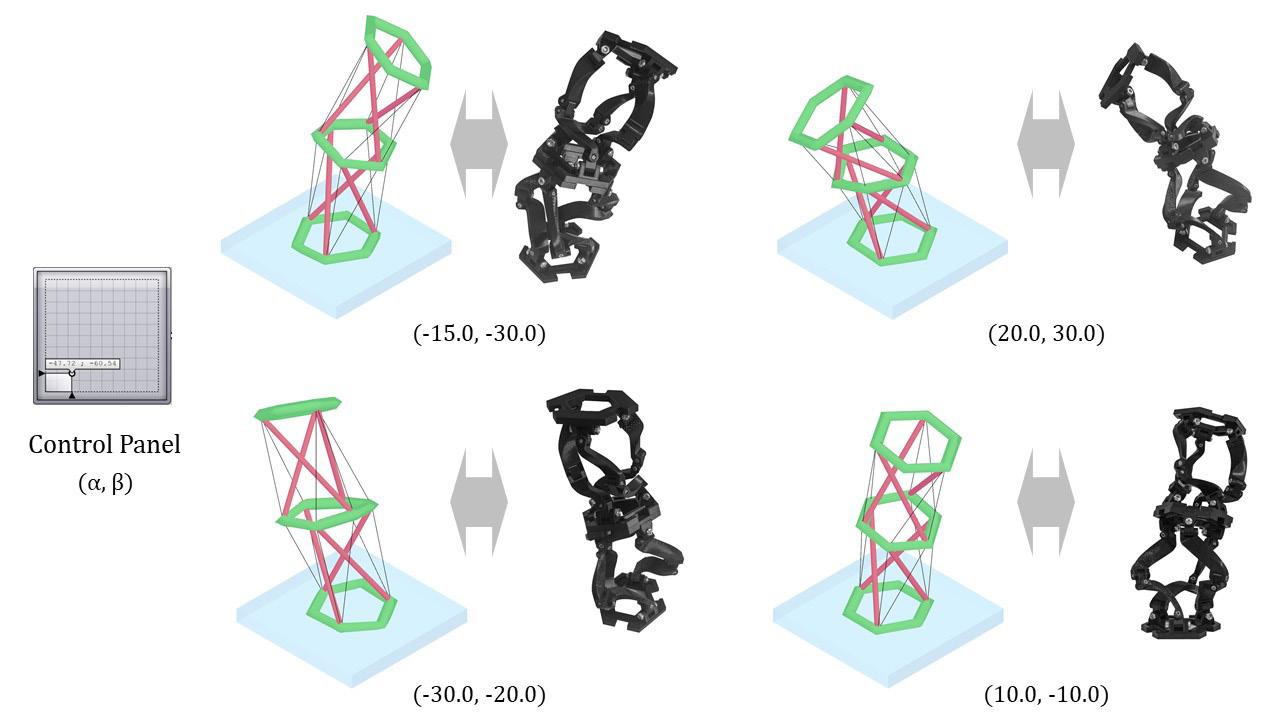
Figure 1. Control parameter inputs and corresponding performance of digital and physical models
Research Problem
To design and validate the effectiveness of these bio-inspired mechanism, it often requires back and forth testing between computation and prototyping since their inherent elastic nature may cause unexpected deviations or mechanical failure. In fact, an integrated pipeline that allows for efficient modeling and quick preview of the results in both digital and physical environments can significantly enhance the quality of preliminary developments, which is the main focus of this article.
The development of such sophisticated systems, however, have presented technical challenges, particularly due to the lack of an intuitive, entry-level framework that seamlessly synergizes the mechatronic system and robotic design computations. Therefore, the principal objective of this research is to develop a unified framework for continuum robots that combines both digital and physical models.
Design Proposal
[Dynamics Computation]
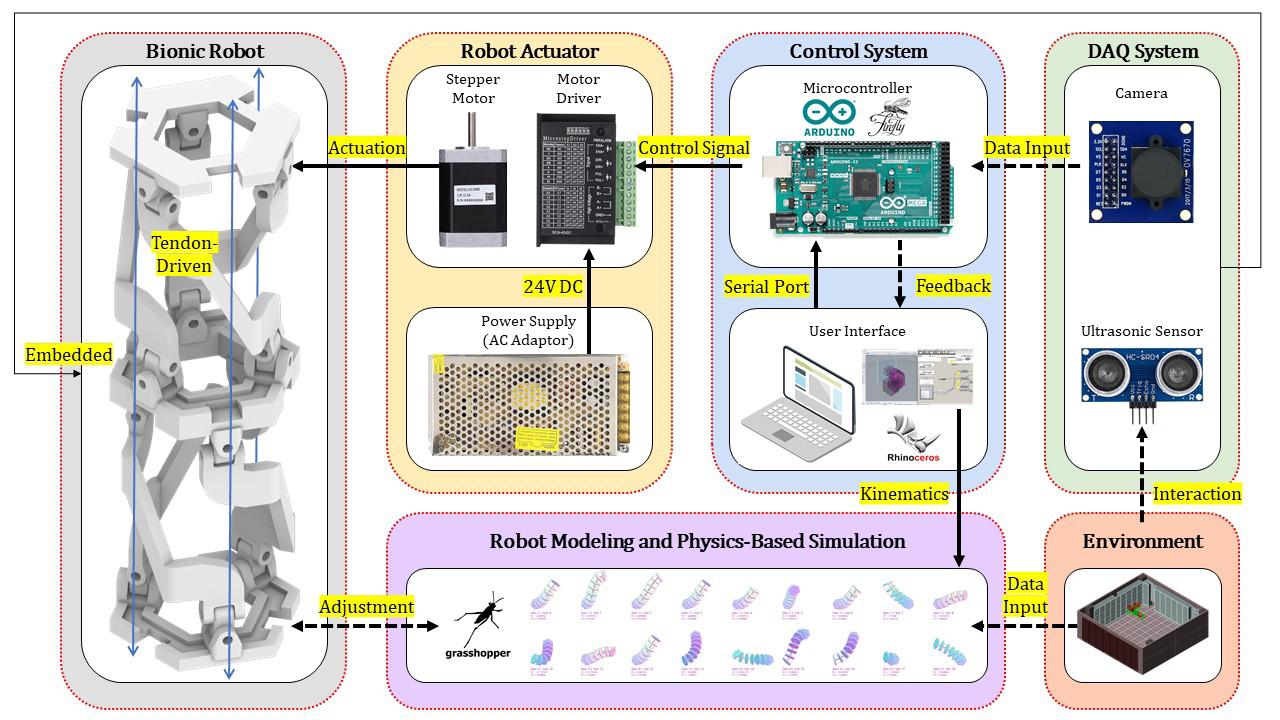
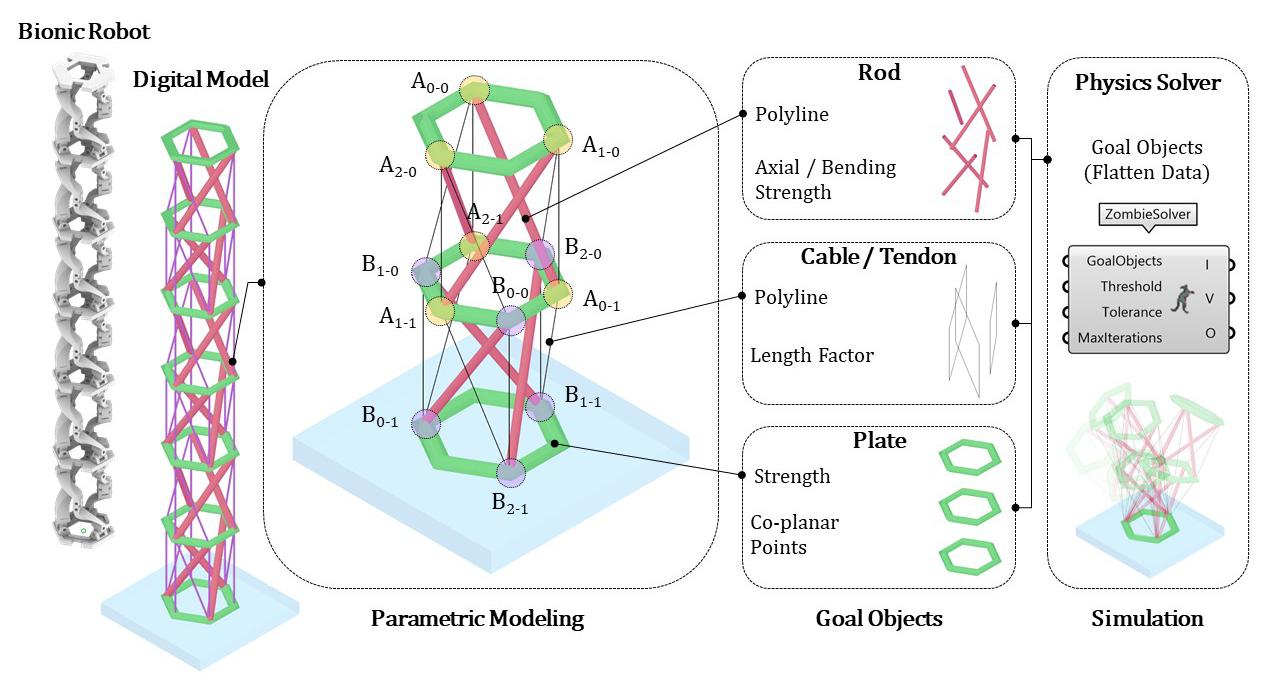
The proposed integrates the computational and mechatronic system (Figure 2). In terms of simulation, it uses polyline objects and mesh objects to represent the tendon actuators and rigid components respectively (Figure 2), which reduces the computation complexity and achieves a responsive modeling method. By quickly viewing the simulated dynamics and deformation of continuum robots when applying tensile forces, users can make adjustment to reach their ideal robot configuration or locomotion.
[Control Strategy]
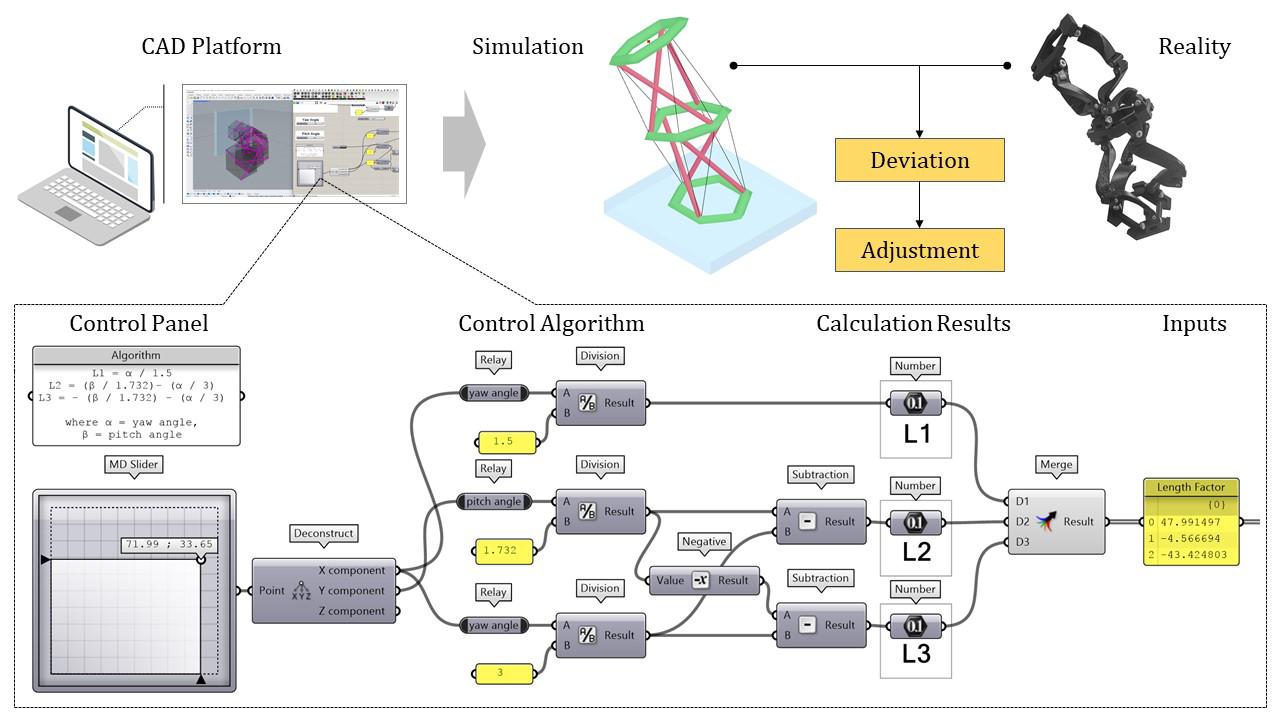
The versatility of continuum robots depends on the manipulation of actuators’ length variations. The simulation results (Figure 1) manipulated by control panel demonstrates the effectiveness of the proposed systematic framework. By inserting the control function (Figure 4), users can easily control the robot’s movement by defining the ideal yaw and pitch angle (α
Figure 2. System architecture
Figure 4. Computational framework
Figure 3. Physics-based simulation
Visualization and Optimization of Continuum Robots: Integration of Lie Group Kinematics and Evolutionary Algorithm
Robot Modeling, Lie Group, Evolutionary Algorithm
[Project Description]
The research introduces an efficient modeling method for continuum robots
[Instructor]
June-Hao Hou
[Publication]
Published on arXiv: https://doi.org/10.48550/arXiv.2410.14305
Demonstration video: https://youtu.be/9UWLf1npNsw
[Research Type]
Independent Design Research
[Project Year] 2024
Continuum robots, known for their flexibility and compliance, offer great potential in applications such as medical surgeries, inspections in confined spaces, and wearable devices. However, the complexity of their non-linear kinematics and the challenge of achieving effective control and digital modeling hinder their broader adoption. This paper proposes a novel approach to continuum robot modeling by combining Lie group kinematics with an evolutionary algorithm Instead of traditional methods that rely on manual identification of modal coefficients, this approach automates the process through an evolutionary optimization mechanism. The proposed method minimizes the deviations between simulated configurations and ideal shapes, improving efficiency and accuracy in robot design. Results show the effectiveness of this approach in reducing computational complexity, allowing for real-time modeling and control of continuum robots. This work offers a new perspective on the digital design of soft robotic systems, making them more accessible and adaptable for various applications.
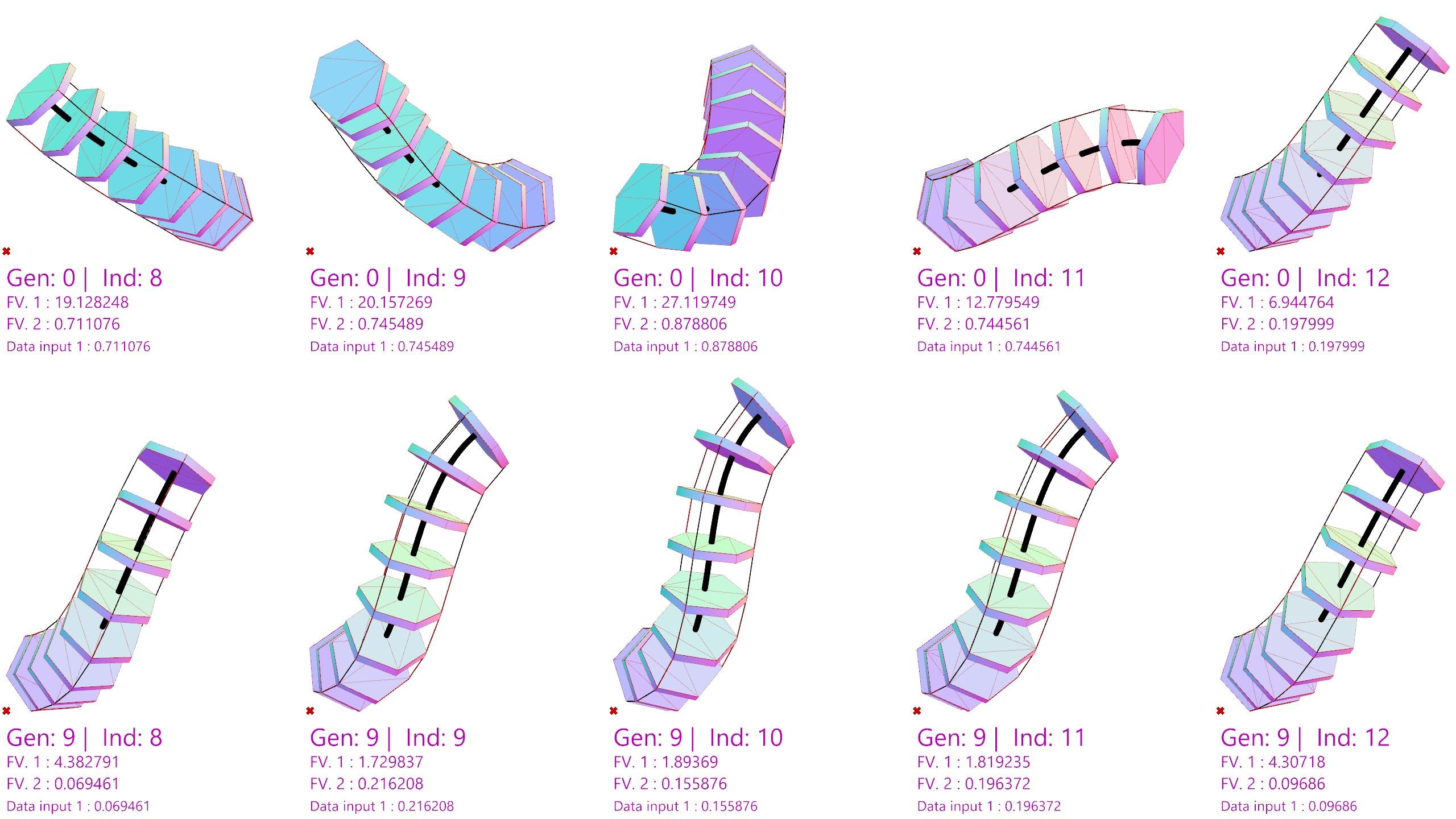
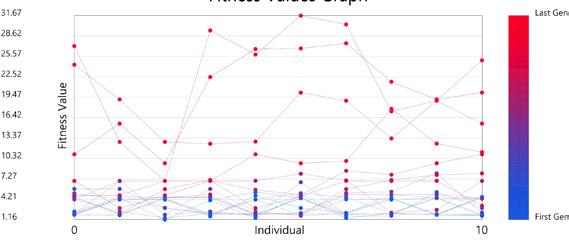
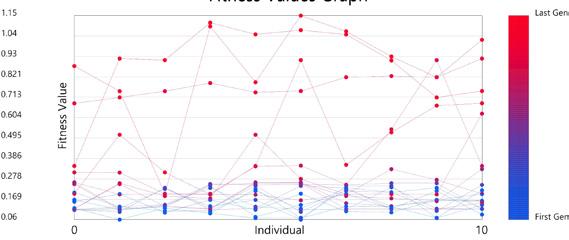
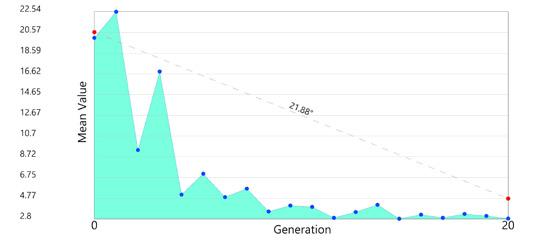
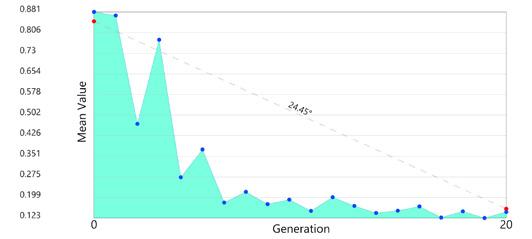
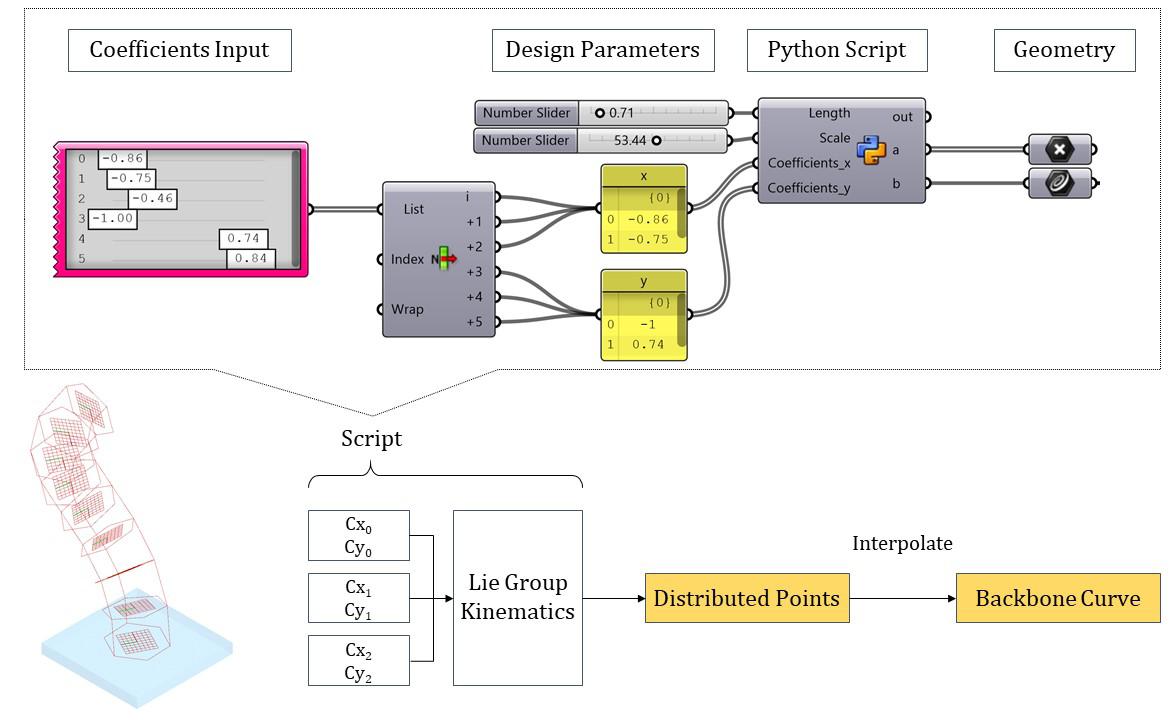
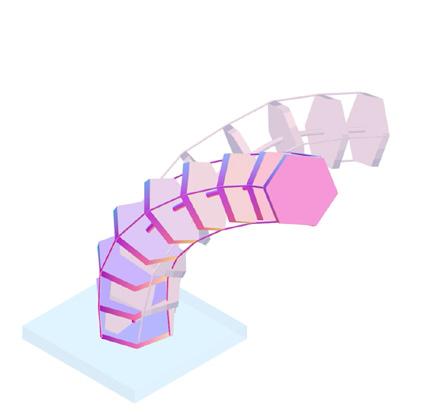
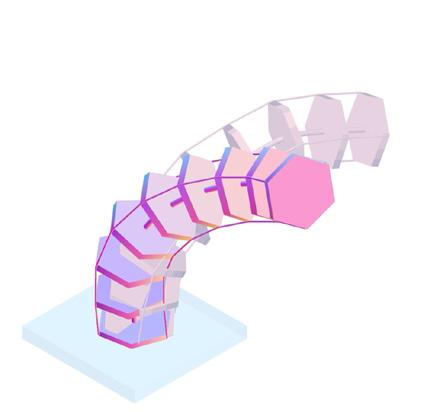
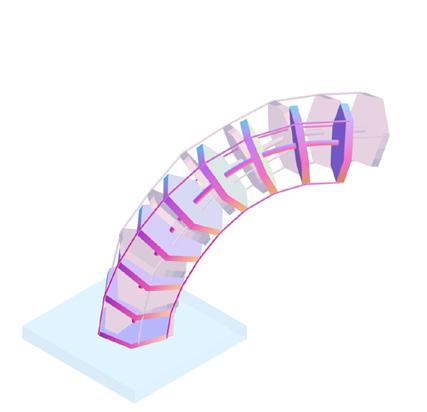
Figure 1. Modal shape derived from individual generation
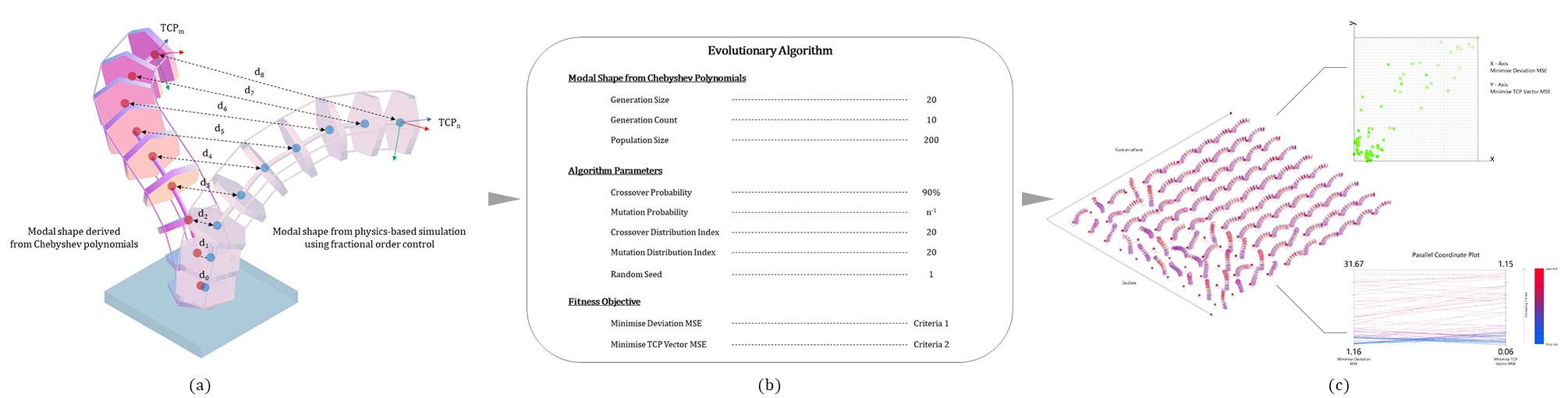
The main concept of the proposed method starts with replacing the traditional modal coefficients identification process with an evolutionary algorithm, which is automated and accurate. Firstly, a series of robot configurations are generated using fractional order control and physics-based simulations in the Grasshopper platform. These configurations are set as the ideal shapes for the modal shape function s(x). The fitness objective of the evolutionary algorithm is to minimize the deviations between the shape derived from the modal shape function and the ideal ones. To achieve this, two fitness objectives and settings are defined as the following:
Results
1. Minimize deviation mean squared error
2. Minimize TCP vector mean squared error
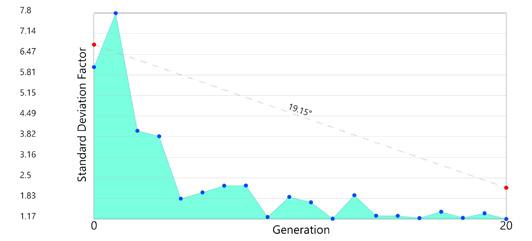
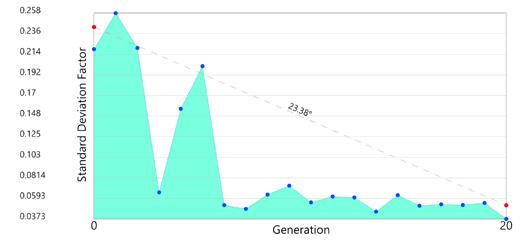
• Generation Size: 20
• Generation Count: 10
• Population Size (n): 200
• Crossover Probability: 90%
The comparison between Generation 0 (the first generation) and Generation 9 (the last generation) highlights the effectiveness of the evolutionary algorithm in identifying the modal coefficients, with indexes from 8 to 12 randomly chosen (Figure 1). The individuals from Generation 0 (the first row) have a lower fitness value (FV), demonstrating less similarity to the ideal configuration. The individuals from Generation 9 (the second row), on the other hand, have been refined by the evolutionary algorithm with an improved FV.
An adjustable formwork system based on discrete interlocking mechanism of chainmail, which is suitable for 3DCP complex geometries with non-developable surfaces
[Instructor]
June-Hao Hou
[Publication]
Full-Paper Accepted by eCAADe 2024 (Conference Proceedings, Vol.1, pp.333-342)
Available at: https://papers.cumincad.org/cgi-bin/works/paper/ecaade2024_87
[Research Type]
Independent Design Research
[Project Year] 2023 - 2024
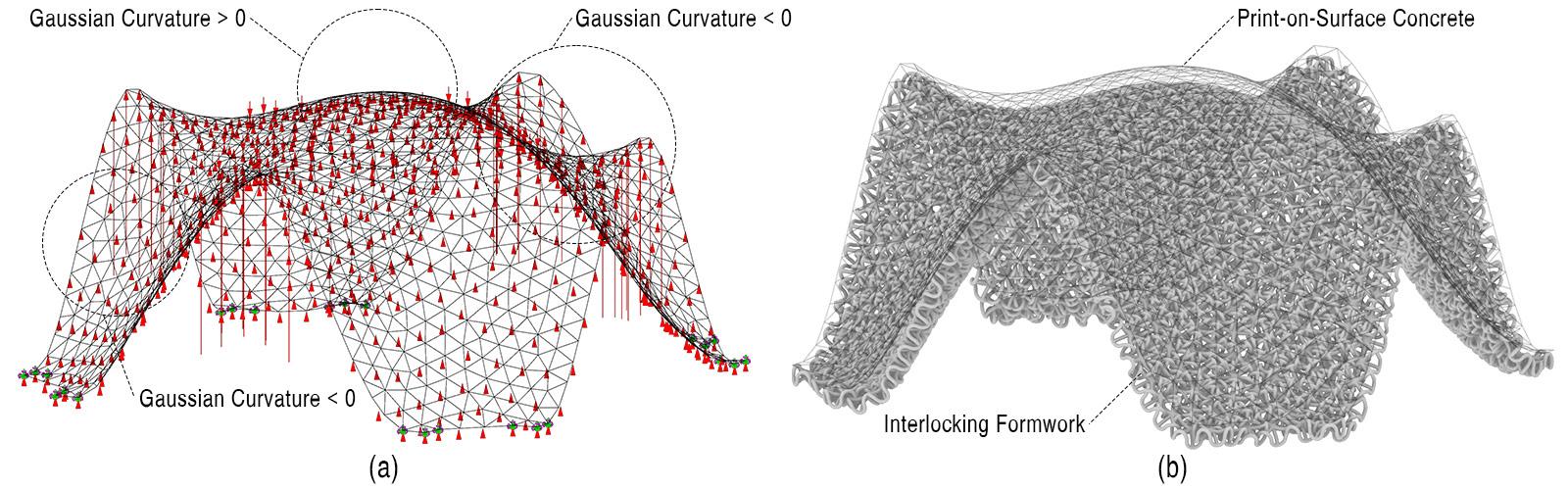
Shotcrete 3D concrete printing (SC3DCP) technology offers vast potential for digital fabrication and structural engineering. However, it faces limitations with complex geometries involving non-developable surfaces. To address these technical challenges from a computational perspective, this research introduces an adjustable formwork system based on a discrete interlocking mechanism. The proposed model consists of an octagonal, porous unit inspired by chainmail. By utilizing the unique chainmail pattern and interlocking parts, the proposed form ensures: (1) a wide range of flexibility at each node that can be applied to various types of curved surfaces; (2) can be reused overtime by adjusting each interlocking part; (3) print-in-place capability without external supports, reducing assembly complexity compared to traditional engineered formwork systems. Overall, the research aims to reduce geometric constraints in the construction domain through a novel, practical method.
[Non-Developable
Surfaces]
Research Problem
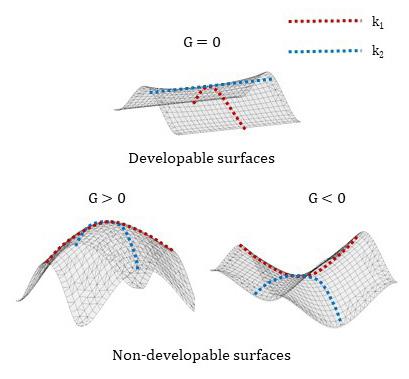
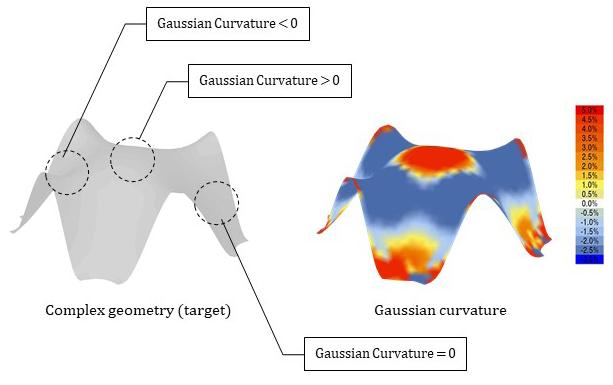
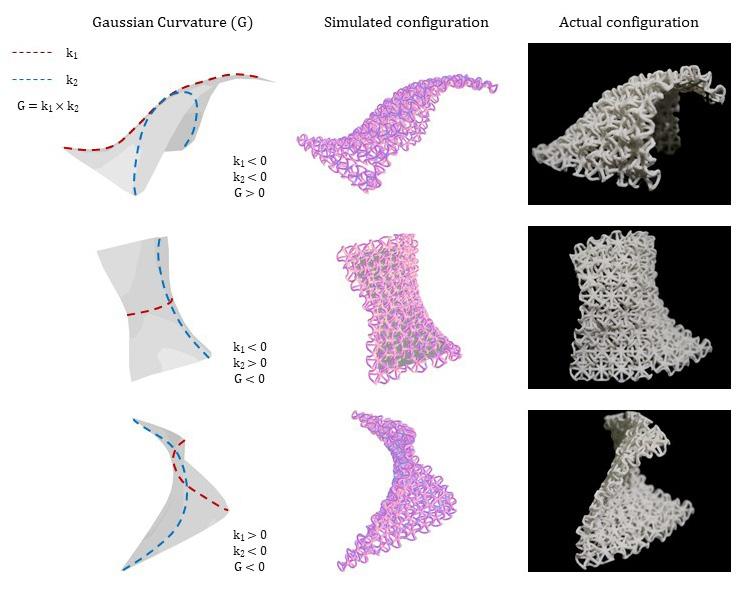
Although the conventional additive technique provides cost efficiency and precision, its limitation becomes apparent when faced with complex geometries, particularly those involving surfaces with non-zero Gaussian curvature. This type of curved surface cannot be flattened without distortion and has a non-zero Gaussian curvature, indicating that the product of the two principal curvatures of the surface patch is either a negative or positive number (Figure 1). These complex shapes require a special formwork that can either stretch or adapt without tearing apart. And this is quite difficult for traditional methods to achieve.
Literature Review
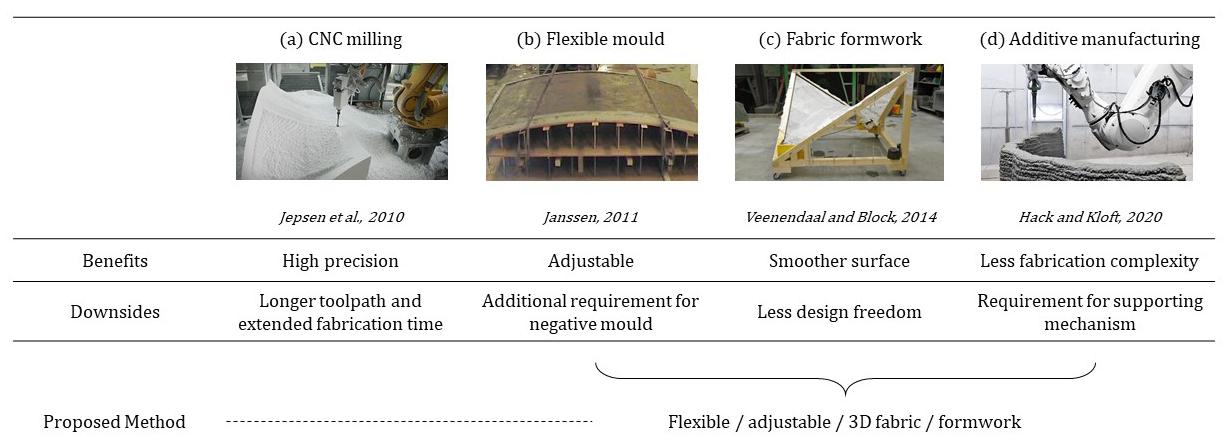
[Existing Techniques]
Existing techniques such as CNC milling, flexible moulds, fabric formwork, and additive manufacturing each have their strengths, but they more or less come with several limitations—whether it’s the extended time required, the need for negative moulds, or constraints on design freedom (Figure 2). As a result, the design intention is to expand the concept of “flexible formwork” from a computational perspective.
Proposed Method
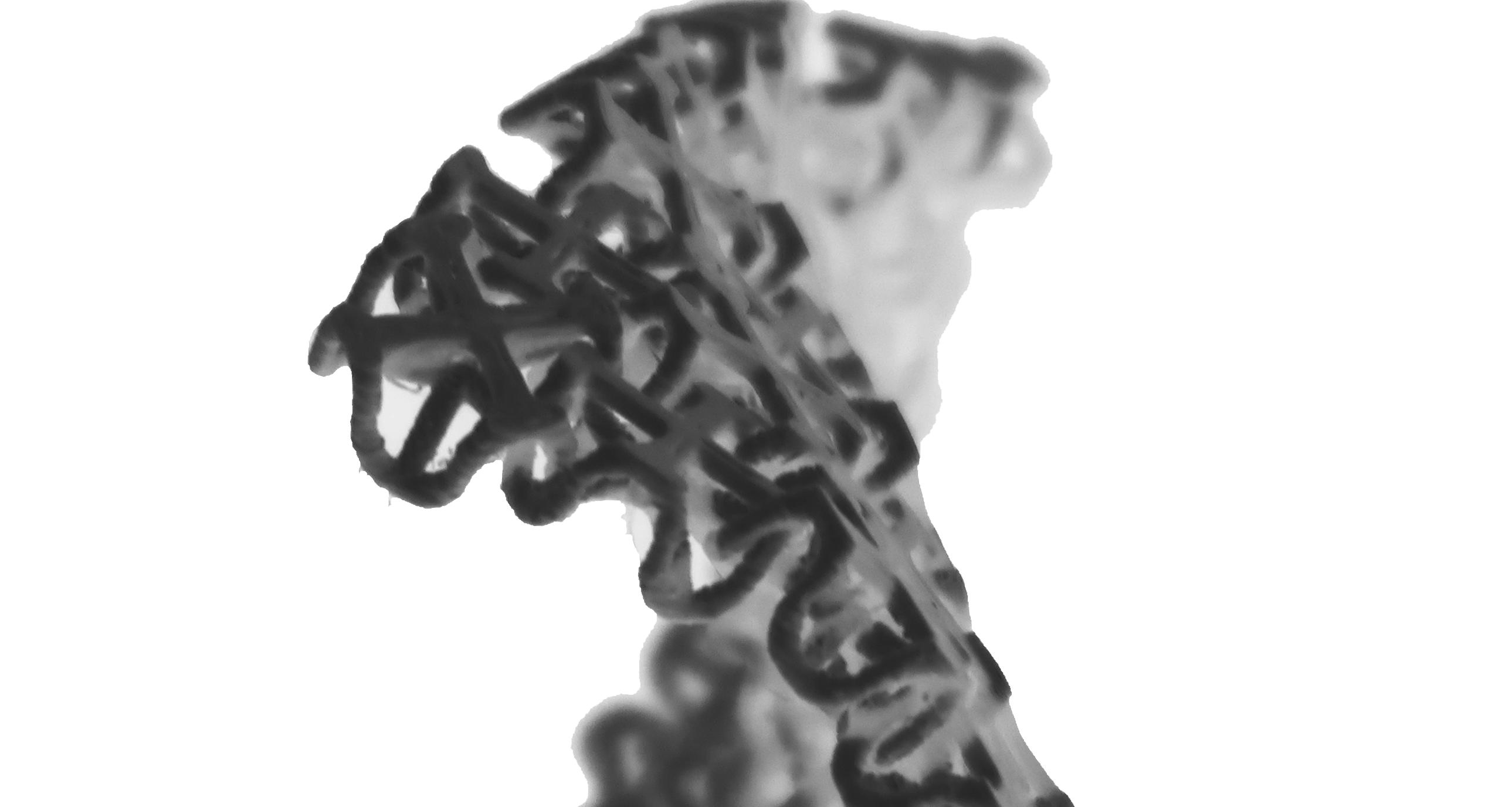
[Discrete Interlocking Mechanism]
The proposed approach draws inspiration from an ancient but powerful concept: the chainmail, which provides an excellent example for utilizing a discrete interlocking mechanism (Figure 3). The key idea here is to develop an interlocking system that can be easily adjusted to fit in various types of curved surfaces. This includes: discretization for interlocking units, an effective modeling and simulation approach, and the final implementation.
Figure 1. Types of curved surfaces
Figure 3.Inspiration from chainmail fabric
Figure 2. Existing fabrication techniques for the production of free-form geometries
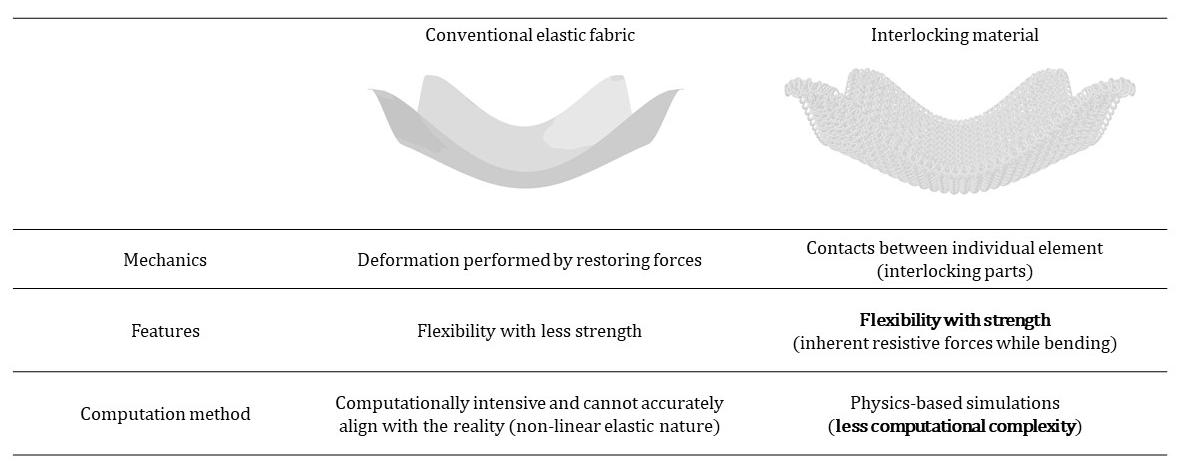
Figure 4. Comparison of flexible material in terms of micromechanical properties
Compared to conventional elastic fabrics, there are two main advantages for using interlocking materials. First, from a physical perspective, it ensures the structural stability based on its inherent resistive forces while it is bending. Secondly, it doesn’t require complex computation. While traditional elastic materials often require intensive computation for their non-linear elasticity, the flexibility in this case is derived from simple contacts between individual rigid elements (Figure 4).
[Method]
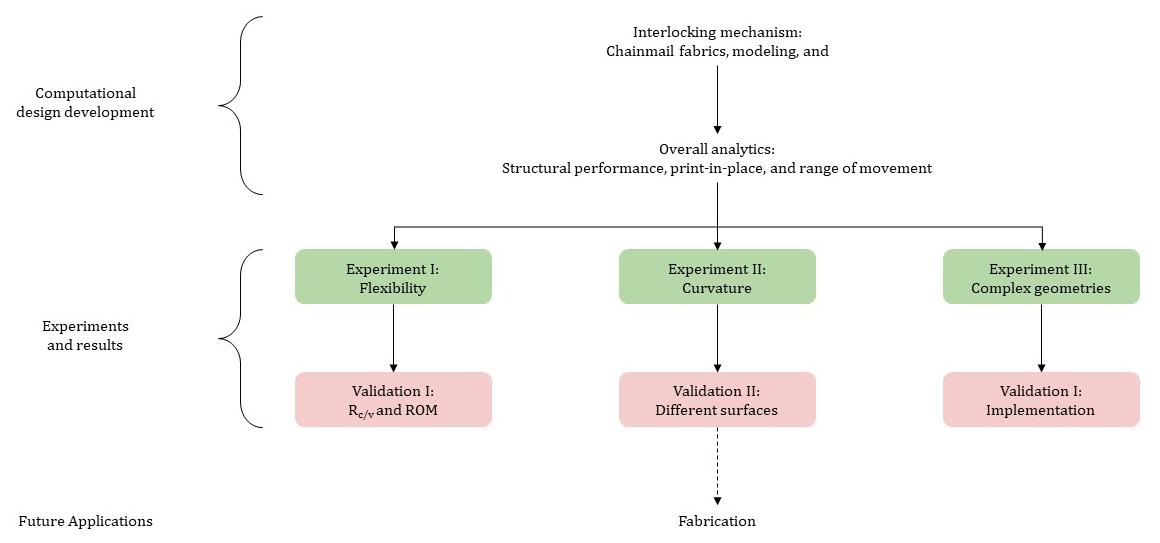
The research method started from the computational design development. Then, the overall performance of this prototype was tested with three experiments, including flexibility, curvature, and suitability to different geometries. And lastly, the potentials of this system was observed and summarized (Figure 5).
[Design Development]
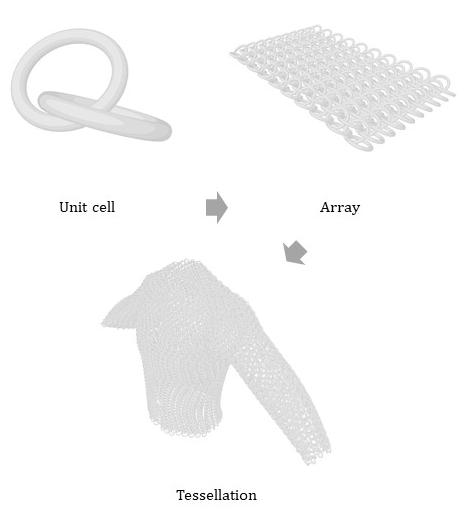
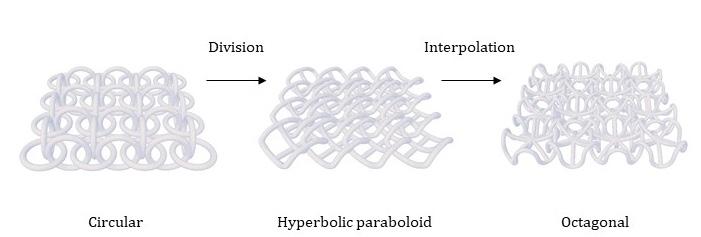
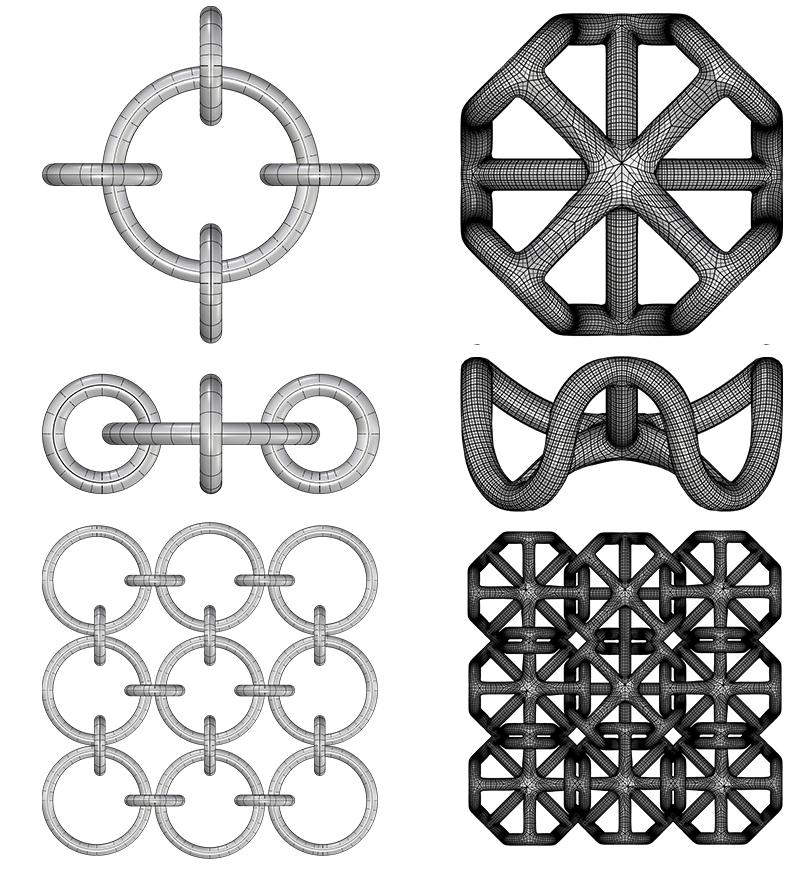
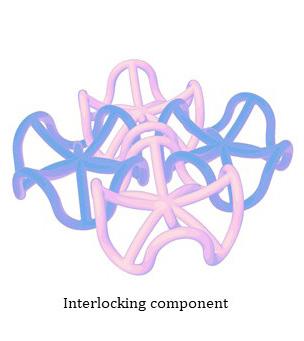
The first step in the design process was to develop an interlocking unit based on basic chainmail pattern, which is a torus connecting adjacent components to form a grid. Then, it was divided each torus into four separate parts based on its interlocking position and interpolated each discontinuous point to becoming smoother and more stable (Figure 6). The final model eventually became a double-curved, octagonal form (Figure 7).
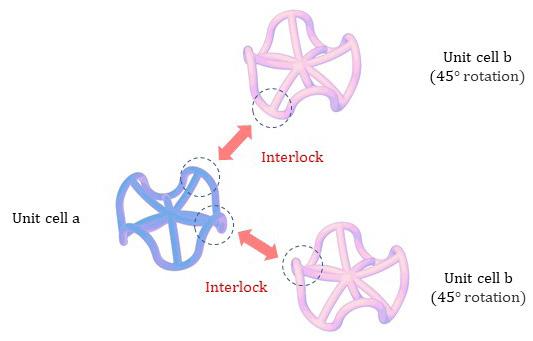
The composition of this octagonal model includes 4 upper and lower parts, connected by two arcs in two directions. As we made the adjacent units rotate 45 degree, each lower and upper part can be interlocked smoothly (Figure 8), and therefore generating a flexible grid pattern.
Figure 7. Chainmail (left) and proposed model (right) (a) (d) top view (b) (e) right view (c) (f) connection
(a)
(d)
(b)
(e)
(c)
(f)
Figure 6. Design Development
Figure 8. Interlocking mechanism
Figure 9. FEM analysis
Figure 5. Methodology
[Structural Performance]
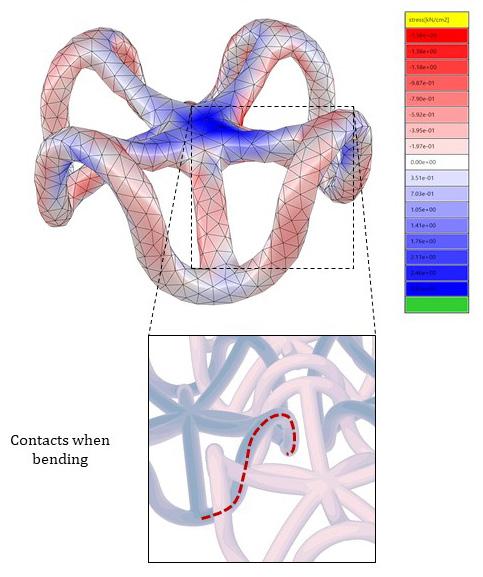
The finite element method (FEM) analysis revealed that the contact part of the interlocking unit can effectively distribute stress once a chain of contacts is formed along a given loading direction (Figure 9). This ensures the stability while bending, especially when subjected to the weight of wet concrete.
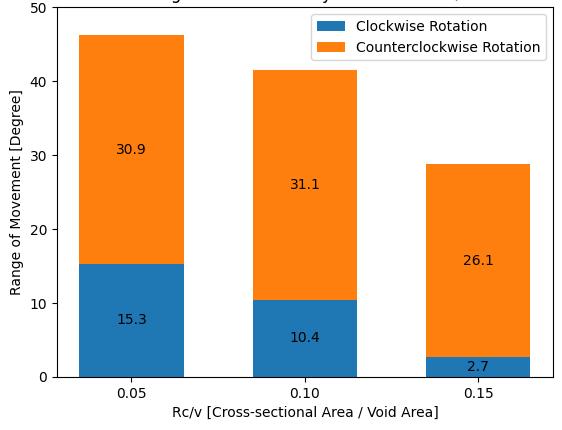
[Range of Movement]
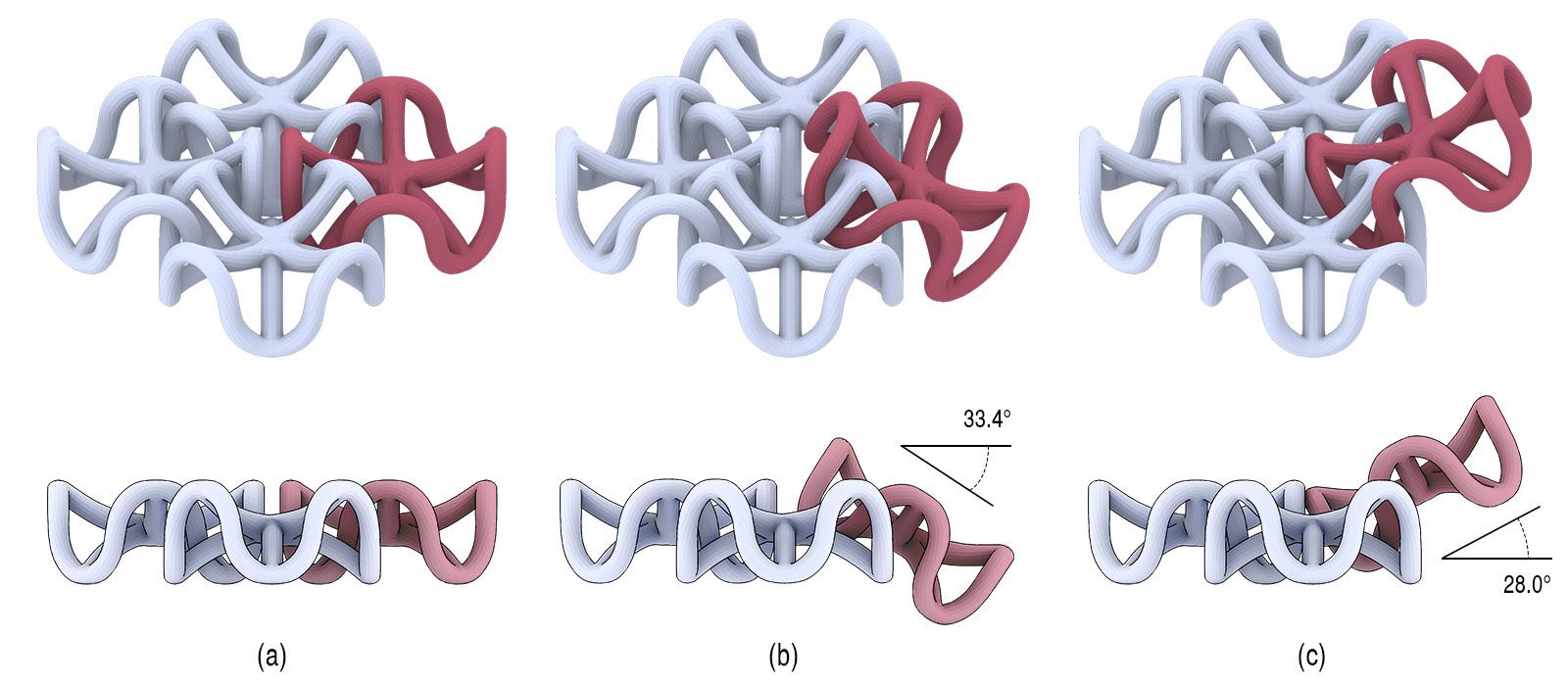
One of the main focus was how to precisely manipulate its flexibility. Basically, the interlocking mechanism allows each component to rotate within a certain range. Thus, the measurement of the range of movement (ROM), which is the addition of in both clockwise and counterclockwise rotation, was considered as the representation of flexibility (Figure 10). And based on simulations, it was observed that the ratio of solid to void area of the interlocking part has such a great impact on the overall range of movement.
Experiment I: Flexibility
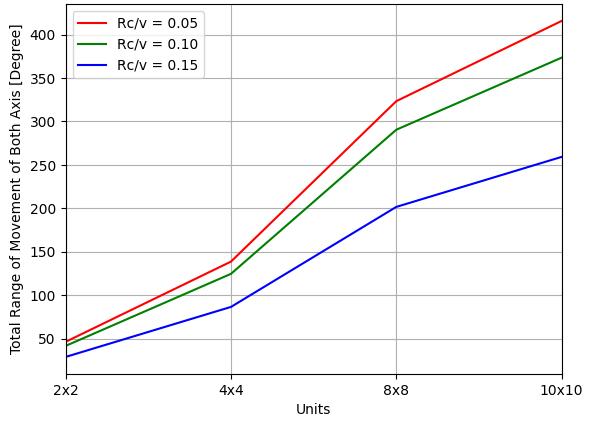
This ratio Rc/v (Figure11), can be considered as the cross-sectional area of the tube (blue part) divided by the local void area (red part). It can also be regarded as the inverse of overall porosity. Three models with different Rc/v value (0.05, 0.10, and 0.15) were included as the control and experimental groups. It was observed that the Rc/v value and ROM are in a negative correlation (Figure 12), which means a lower Rc/v value, or a larger porosity, ensures a better performance in the overall flexibility. Furthermore, to make sure if this correlation maintains as the number of interlocking units increases, the grid size from 2x2 to 10x10 were tested. The result showed that the rotation angle improves as more interlocking parts are used, making it highly adaptable to larger and more complex surfaces (Figure 13).
Figure 11. Diagram of the Rc/v value
Figure 10. Range of movement in isometric view (top) and elevation (bottom) (a) normal state (b) clockwise (c) counter-clockwise
(a)
(b)
(c)
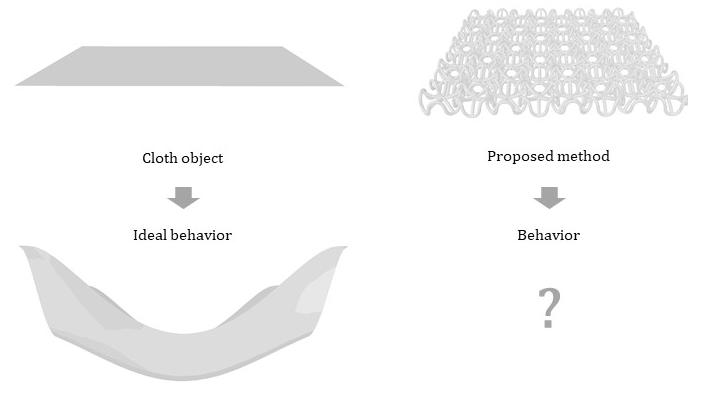
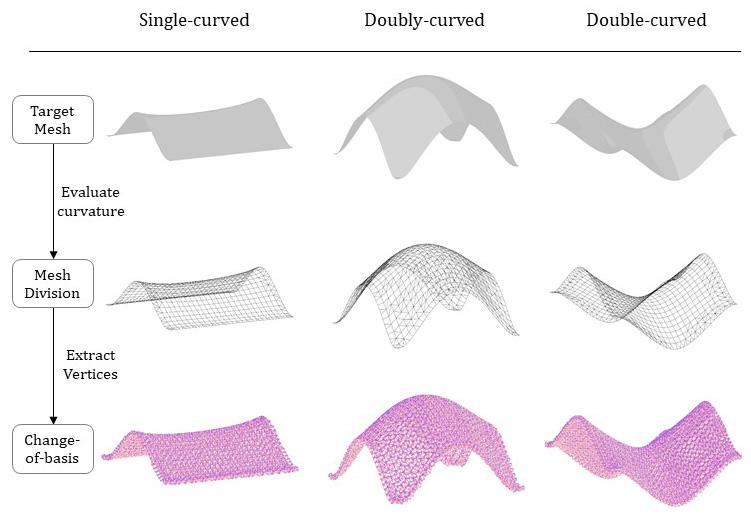
Experiment II: Curvature
The second experiment aimed to validate the hypothesis that interlocking model can act as chainmail fabrics, which is able to perform as a cloth object with high compliance (Figure 14). Thus, a computational process was set up for validations (Figure 15), which can be summarized as the following:
1. Define the desired geometry as target surface
2. Mesh B-rep (to convert multiple manifold edges and points into a single mesh that is available for Karamba3D)
3. Mesh to shell (to connect mesh edges that meet at a common point)
4. Define point loads and supports
5. Assemble model (to create a model based on FEM)
6. Analyze (to calculate the deflections of given model entities)
7. Model (Shell) view (to visualize the current state of simulation results)
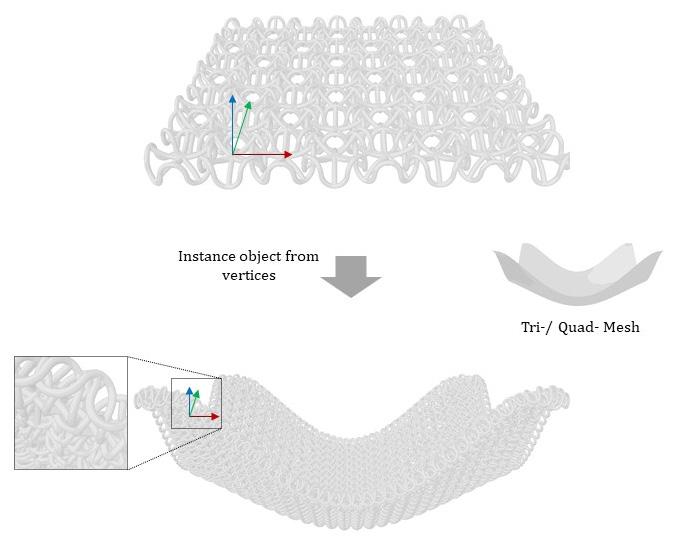
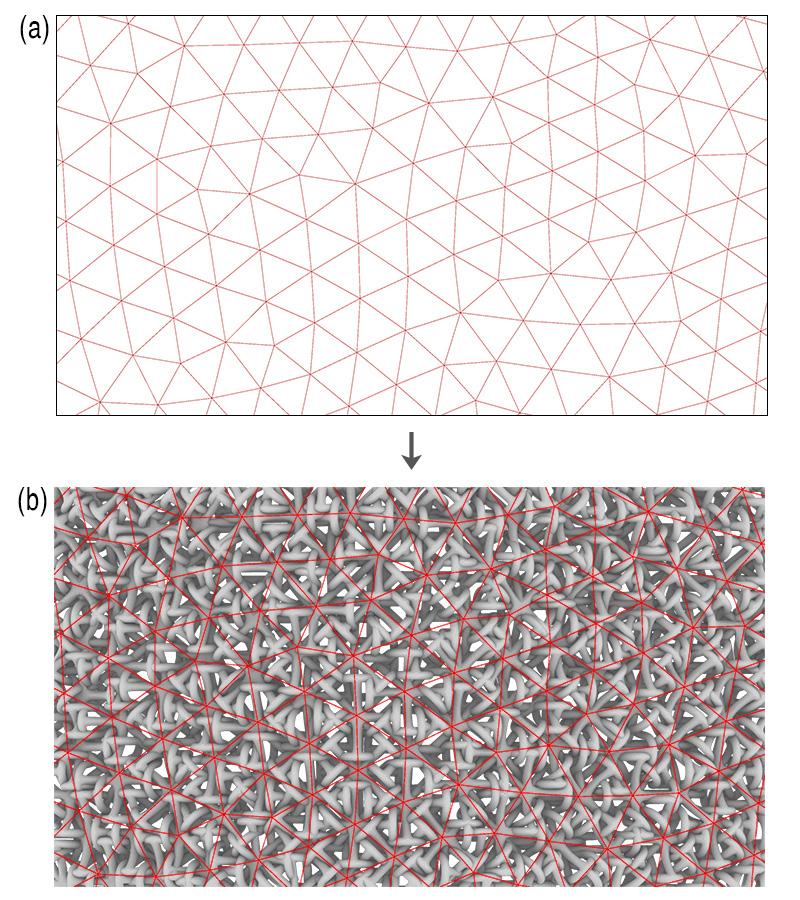
8. Tri-remesh (to convert current mesh into a mesh of near equilateral triangles that each vertex represents the reoriented position of interlocking unit)
9. Surface curvature (to evaluate the Gaussian curvature of each mesh surface and readjust the tri-remesh settings to fit in the modules of interlocking unit)
10. Deconstruct mesh (to deconstruct current mesh into components)
11. Plane normal (to receive information of each vertex)
12. Dispatch all vertices with key value 0 and 1
13. For each plane normal in list 0: no changes
14. For each plane normal in list 1: rotate 45° along each plane normal so that adjacent units can be interlocked with no collisions or distortions
15. Weave 0 and 1 list (to combine the cell-to-node information of the target surface)
16. Orient (geometry: interlocking units in a grid pattern; target: weave pattern in the previous part; source: centroids of each interlocking unit in grid pattern)
Figure 12. ROM by differential Rc/v Figure 14. Experiment II
Figure 15. Tessellation
Figure 13. ROM by number of interlocking units
[Gaussian Curvature]
The interlocking system was tested with different Gaussian curvatures, including single-curved, doubly-curved, and double-curved surfaces (Figure 16). By adjusting the division size of the target mesh, the system can adapt to these surface types without collision error or compromising its structural integrity. This adaptability is one of the key features of this project.
Experiment III: Complex Geometry
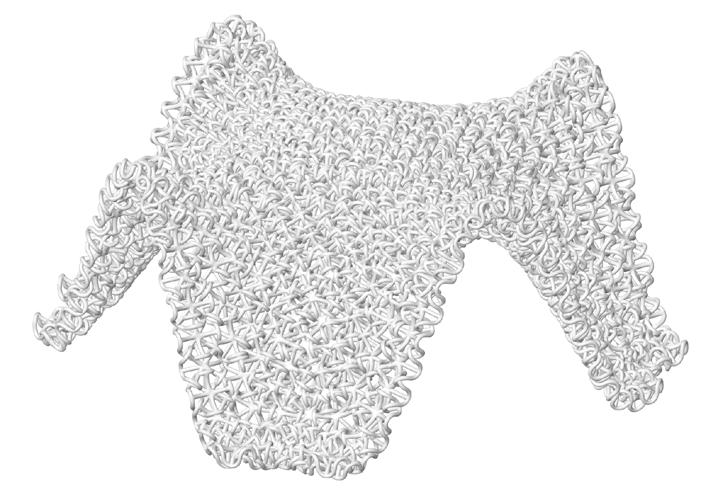
Following the previous two experiments, the main objective of the third experiment was how it could be applied to complex geometries featuring a mixed Gaussian curvature, which seemed to be more and more common in contemporary architectural projects. The testing set (target geometry), which consists of a mixture of zero and non-zero Gaussian curvatures, were selected to figure out if the interlocking system could adapt to it (Figure 17).
Both static and dynamic method were used in this experiment. The static analysis here included the tessellation algorithm to remap from basis node to desired UV coordinates (Figure 18), and the dynamic method was based on the physic engine in Blender to validate the actual configuration with high fidelity data. The result of the former method confirmed the effectiveness of aligning the interlocking units with the desired surface. Meanwhile, the latter simulation demonstrated it could maintain its configuration under stress with the inherent resistive forces (Figure 19), providing the necessary stability for real-world applications.
Figure 16. Result of experiment II
Figure 17. Target geometry
Figure 18. Change-of-Basis Transformation
Figure 19. Results
(b)
(a)
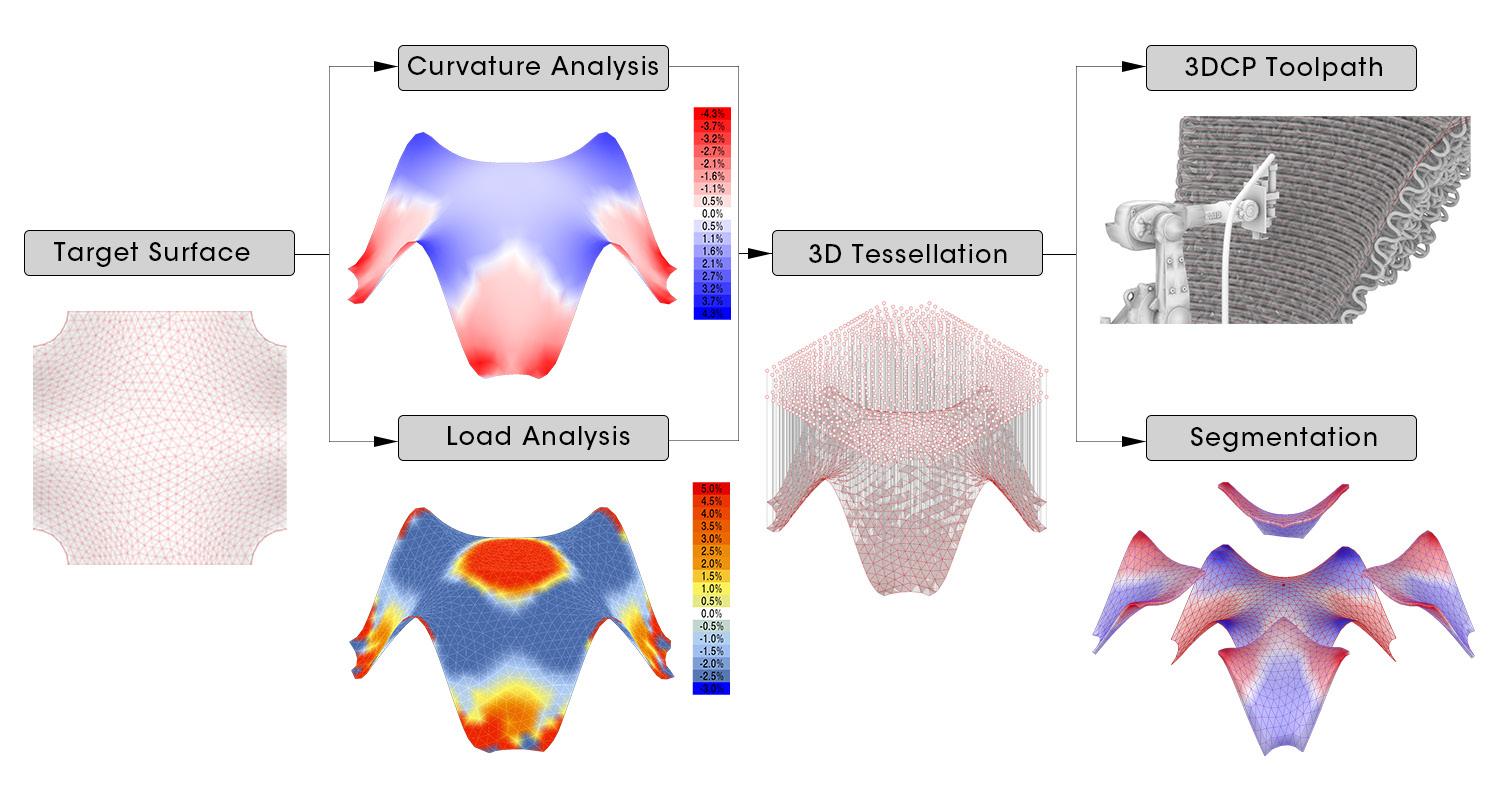
Figure 20. From mesh face analytics to discrete tessellation (a) structural load and curvature analysis (b) formwork formulation with non-developable surfaces
Result and Validation
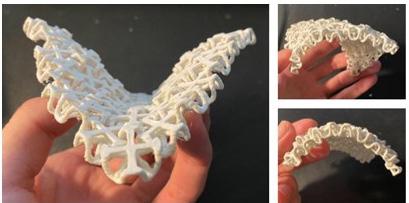
To validate the deviations between simulations and actual performance, a series of physical models were fabricated (Table 1). The results were promising — the physical models can match the simulation results with an acceptable deviation. For example, the max ROM in digital and physical environments are 285 and 275 degrees respectively, indicating a slight deviation of 3.5% (Table 2). Moreover, it can adapt to different types of curved surface, which verifies the computational method and confirming the system’s practical viability (Figure 21 and 22).
Figure 21. Comparative analysis of digital and physical models
workflow
[Print-In-Place
Capability]
Another innovative aspect of the interlocking system was that it could be printed in place. Traditional formwork systems are usually made in factories and often require external supports, but the interlocking mechanism allows the formwork to be 3D printed directly on-site. That means the fabrication process could start with printing this interlocking formwork and followed by printing the desired shape on its surface . This potential may simplify the construction process, and thus reducing the costs (Figure 24).
[Future Applications]
Both simulation and implementation results indicate the applicability of this interlocking model to various surfaces with differential Gaussian curvatures. The conclusions could be summarized as the following and Table 3:
• The discretization allows each interlocking connection to display different degrees that holds great potential for complex geometries with differential Gaussian curvature.
Fabrication Solution Advantage Limitation
3DCP
Requirement
Precision Inability to Complex Geometries Membrane Formwork / Negative Mould / Supporting System
Table 3. Comparison between traditional and proposed method
• Utilizing the 3D tessellation method, the interlocking mechanism can be transformed to fit in most non-developable surfaces.
• Based on physics simulations, the structural stability of reoriented interlocking mechanism to non-developable surfaces is suitable for concrete coverage, which can be further applied to 3DCP on surface.
• The proposed interlocking formwork can conform to both developable (Gaussian curvature=0) and non-developable surfaces (Gaussian curvature≠0).
• The proposed formwork can achieve various configuration and maintain stability without external supports. more design freedom.
Figure 23. Print-in-place process
Figure 24. Design-to-fabrication
Figure 22. Bending the model
Table 1. Properties of the prototype
Table 2. Maximum ROM of digital and physical models
Low-Tech Bamboo Constructions:
A Cable-Strut Approach for Resource-Limited Conditions
A reciprocal bamboo structure based on cable-strut connection, integrating design computation and construction
[Instructor]
June-Hao Hou, Pei-Hsien Hsu
[Publication]
Full-Paper Accepted by eCAADe 2024 (Conference Proceedings Vol.1, pp.393-400)
Available at: https://papers.cumincad.org/cgi-bin/works/paper/ecaade2024_115
[Research Type]
Collective Design Research, Design-Build Project
[Project Year] 2023
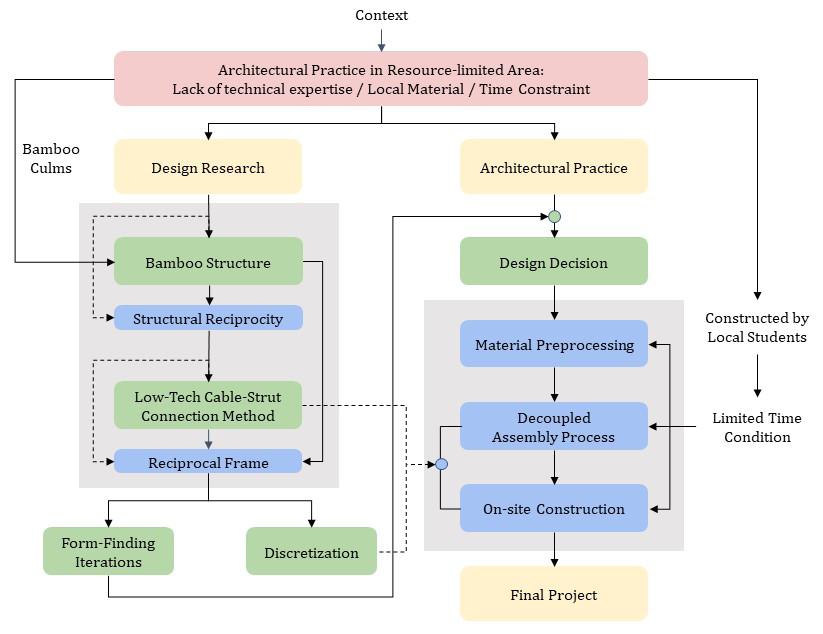
Despite the rapid development of building technologies, low-tech construction methods using local materials are still preferred in resource-limited areas. The question addressed in this research is how design computations can be integrated into a localized building process. This research is conducted in collaboration with an architectural practice at the NYCU campus in Hsinchu, an area rich in bamboo resources. Given the contextual challenges of limited time and technical expertise, the research aims to develop a low-tech, tectonic framework for bamboo structures, which includes (1) form-finding iterations combining reciprocal frame and tensegrity structures, (2) an advanced cable-strut connection approach utilizing local resources and the inherent flexibility of bamboo culms, (3) a decoupled assembly process enhanced by computational tools, and (4) practical application in the final project.
Research Problem
Noticeably, there is a growing need for construction methods that are both low-tech and sustainable, especially for constructions in resource-limited conditions. Building upon this context, bamboo culms were included as a lightweight, sustainable material.
Bamboo has been a prominent material in architecture across different cultures for centuries. This material is usually coupled with the structural concept of reciprocity, where components mutually support each other to achieve a self-supporting configuration. Based on the principle of reciprocity, various forms can be derived.
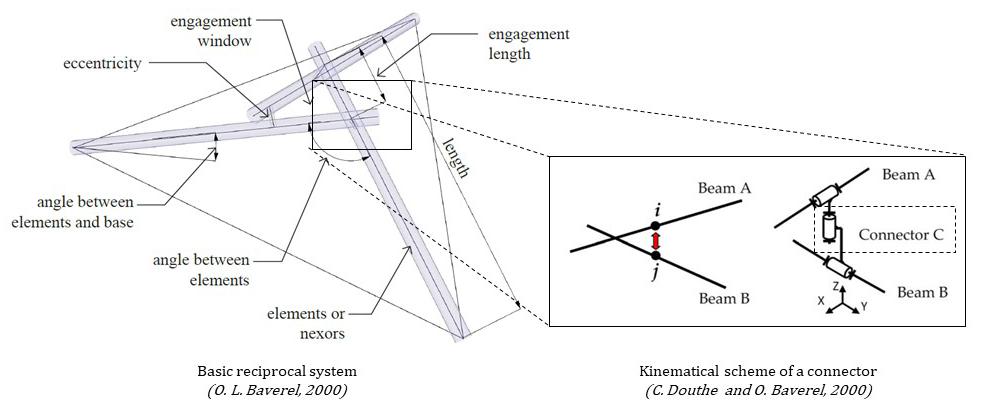
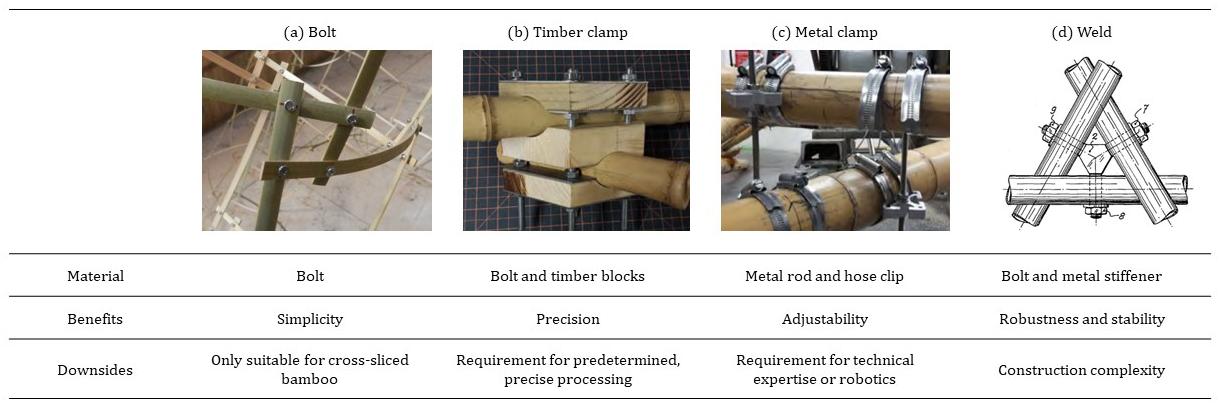
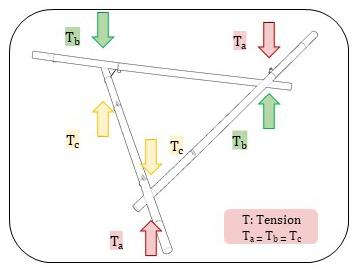
One of the most critical aspects of bamboo constructions is connections, especially for these non-coplanar boundary conditions in a basic reciprocal system (Figure 1). Based on this kinematical diagram, there must be a connector that prevents each adjacent struts from relative displacement through a special mechanism.
Existing methods deal with this issue through similar strategies, such as using customized timber blocks, metal rods, hose clips, or stiffeners. These construction methods truly provide a few solutions (Table 1). But, most of them require additional processing of the connectors or the utilization of robotic arms for assembly, which is not available in resource-limited contexts. So, the objective of this research was to focus on the development of a new connection in digital and physical environment.
Proposed Method
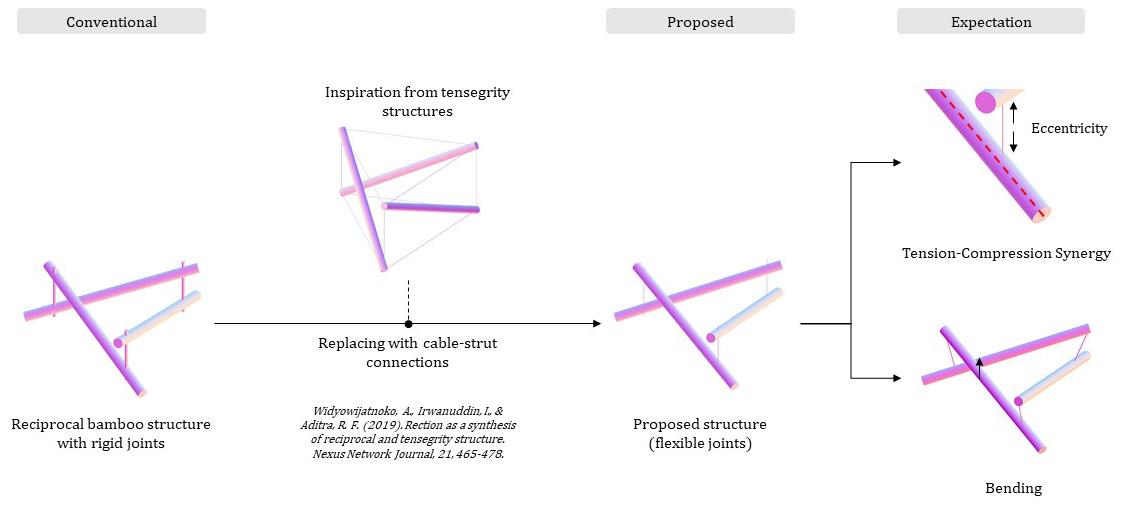
The method started from designing the connection and testing it on bamboo, followed by the form-finding iterations, construction planning, and the final building process (Figure 2).
Firstly, the rigid joints were replaced with flexible ones (inspired by tensegrity structures) to utilized the tension-compression synergy and enhance the overall stability (Figure 3).
Figure 1. Non-coplanar issue of connections
Figure 3. A practical solution using cable-strut connections
Table 1. Existing construction method for reciprocal bamboo structures
Figure 2. Method
Proposed
Connection
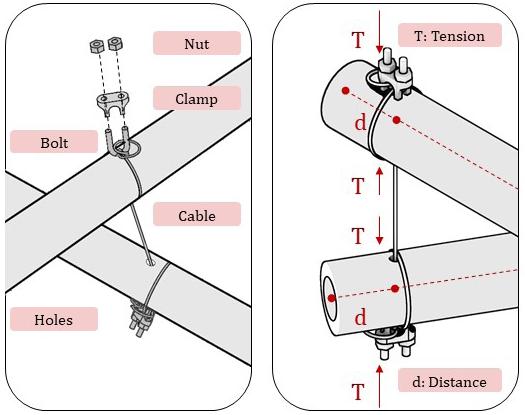
1. Drilling holes:
2. Inserting cables:
3. Anchoring:
4. Attaching:
Perforating through bamboo culms at a distance of 35mm (d) from the edge using 10mm diameter drills.
Passing cables through holes at both ends of the bamboo culms.
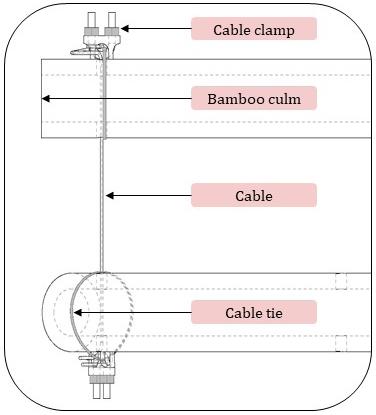
Anchoring the cables with cable clamps on the opposite side.
Fastening these cable clamps circumferentially around the bamboo culms using cable ties.
The first advantage of this method is that it can distribute forces evenly across an area of bamboo surface instead of a single point. This prevents stress concentration that may cause fractures along the fiber direction, which usually happens when dealing with the bamboo culms. The second benefit is that these hardware accessories are available and doesn’t require much hands-on experiences to handle. Moreover, it is adjustable, which means we can adjust the pre-stress by rearranging the cable length using cable clamps or with additional turnbuckles (Figure 4).
[Testing on Bamboo Culms]
Testing on bamboo culms was also conducted for further validations (Figure 5). It was observed that this connection could effectively distribute stress and solve the out-of-plane shear forces, preventing distortions and deviations. However, it showed that if the perforation was too close to the bamboo edge, the cables might cause brittle fractures along its fiber direction.
Cable-Strut Reciprocal Frame
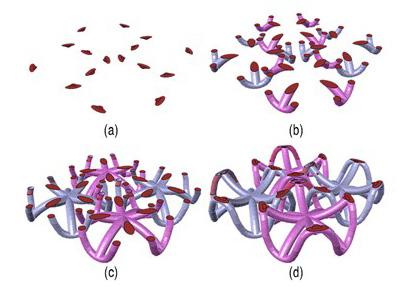
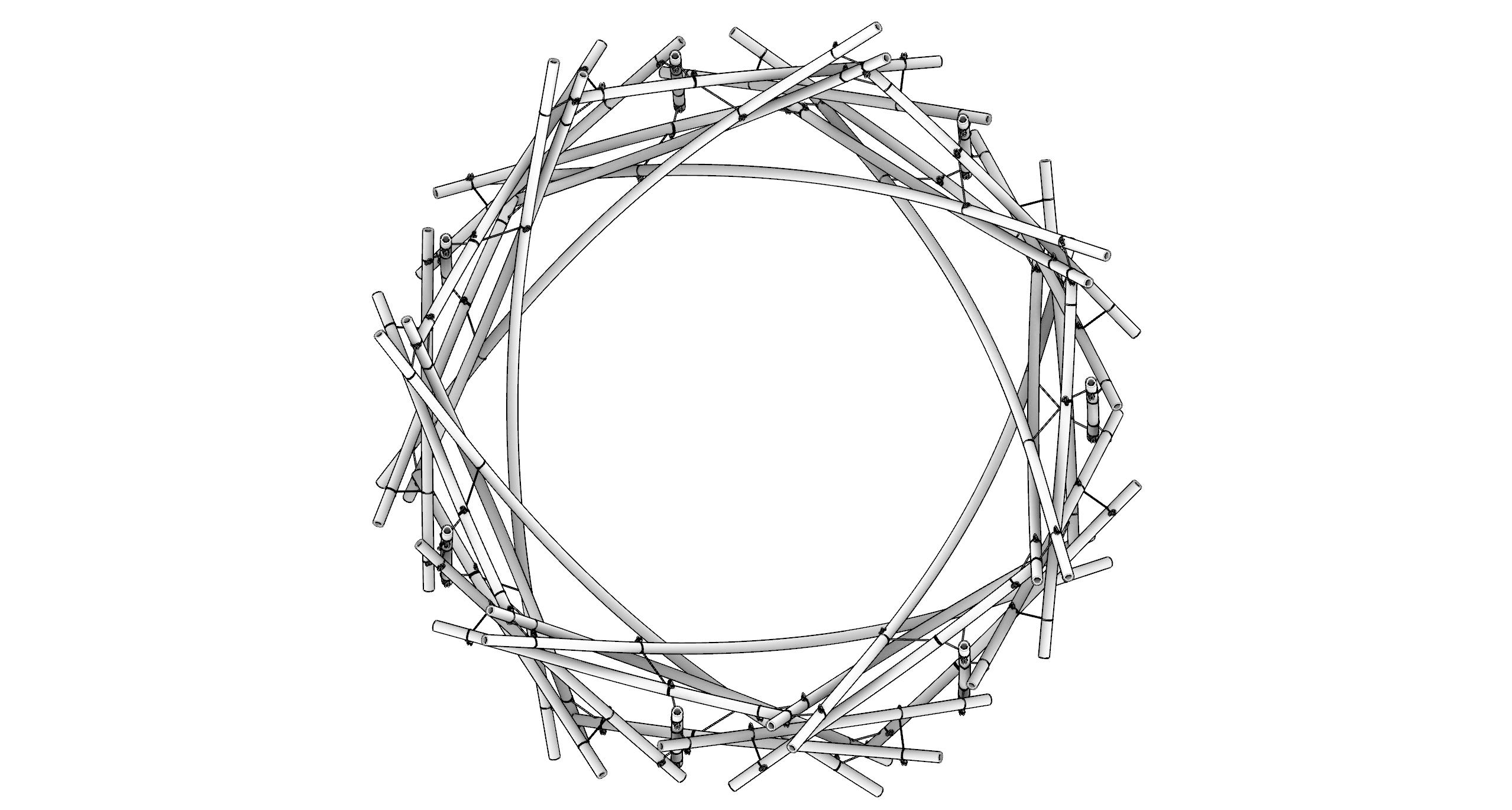
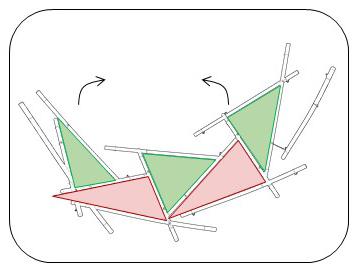
The recursive force loop here is based on the self-equilibrium with tension forces in cables. Once all connections were employed, the three bamboo culms were suspended by each other, achieving equilibrium (Ta = Tb = Tc). The basic configuration was then augmented by connecting adjacent components in two reverse directions, forming a belt geometry. Furthermore, it is deployable, which means it can be folded during delivery and unfolded on-site (Figure 6).
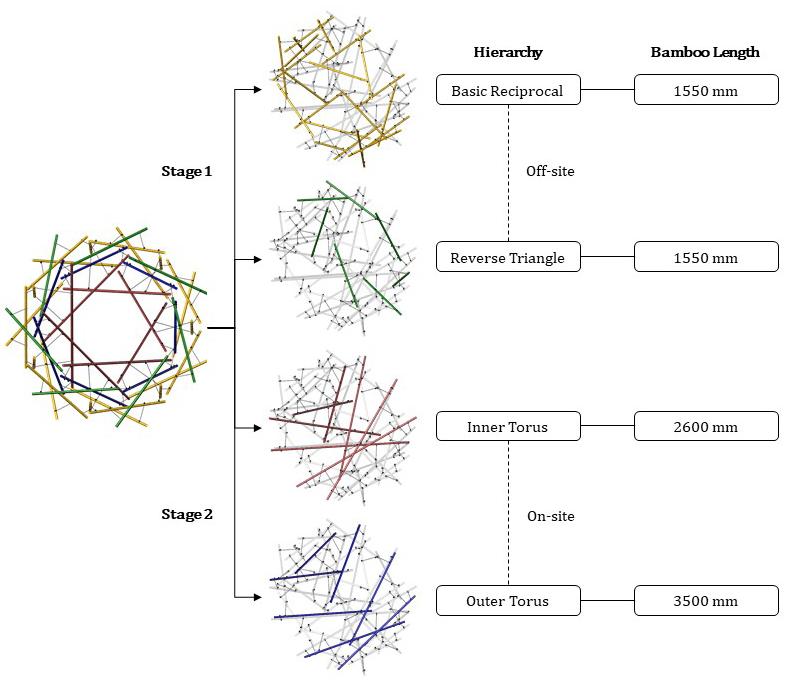
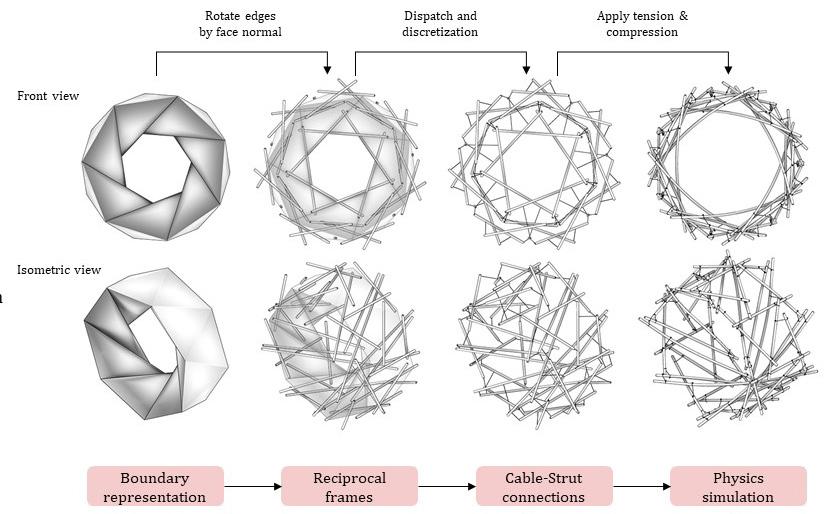
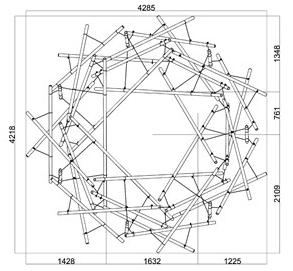
The design concept was to create a torus to emphasize the recursive force loop. To achieve, a computational design framework was developed as the following steps (Figure 7 and 8):
B-Rep method was used as the representation of the cable-strut reciprocal prototype in preliminary design computations to enhance computing efficiency. To emphasize the bending capability of the proposed prototype, the belt-like form was converted into a closed-
Figure 8. Form-finding
Figure 6. (a) Basic reciprocal frame (b) belt shape foundation
Figure 7. Hierarchy of the structure
2. Reciprocal frames:
3. Cable-strut connections:
4. Physics simulation:
loop torus. This torus shape was also chosen to fit the context of the campus.
The B-Rep edges were rotated based on each face normal, transforming the entire form into recursive reciprocal frames.
The distances between the end points of the edges and their adjacent end points were connected as new lines, which were dispatched as the cables. To simulate the tensile behavior effectively, these cables were discretized into a series of polylines.
Tensile and compressive forces were incorporated into the computation to simulate the actual configuration of the design.
Construction
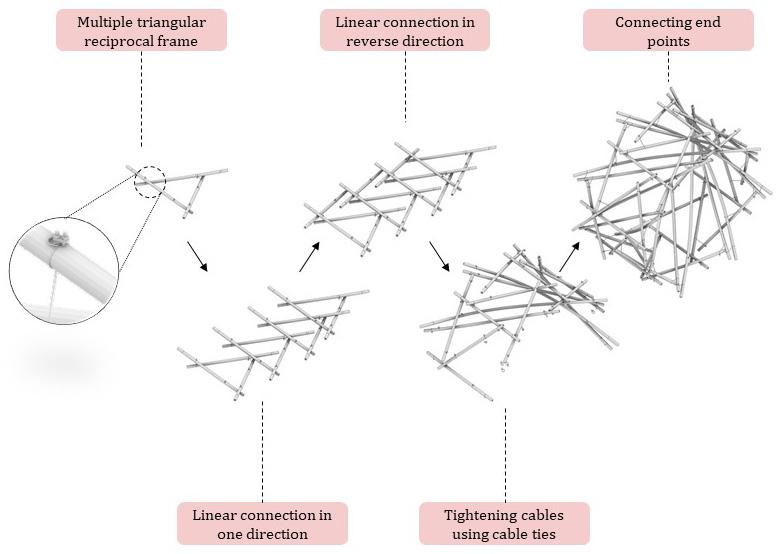
A simulation of the whole building process (Figure 9) before actual construction was conducted to ensure the construction team a better understanding of the process. The entire process started from the triangular reciprocal frames, followed by the linear connection in both directions. Then, the cables would be tightened using cable ties for precise tension adjustments, and the belt shape would bend afterwards. As the end points were connected, the final torus geometry was completed.
Figure 9. Simulated construction process
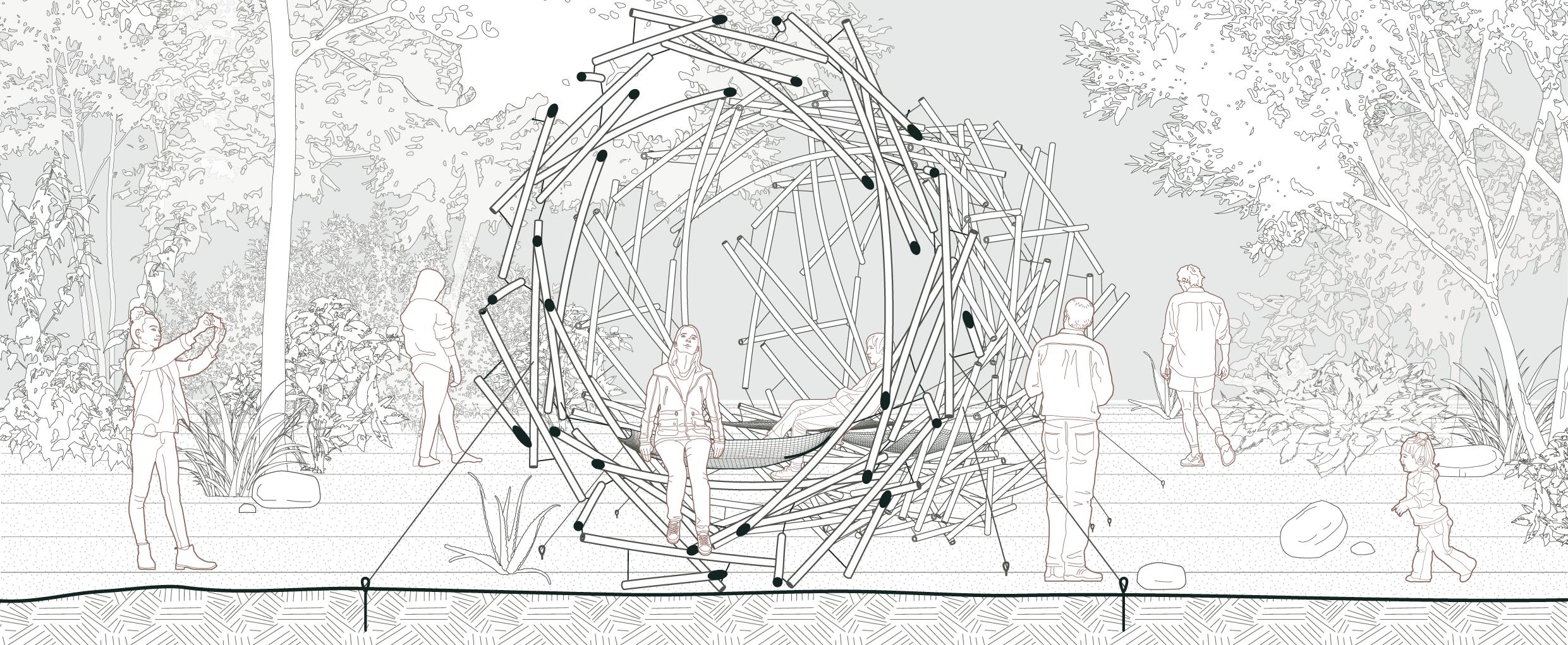
Figure 14. Sectional perspective
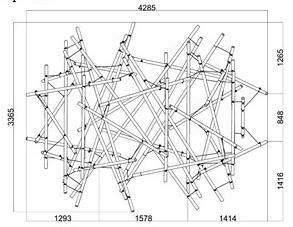
Figure 10. Final project (front view)
Figure 12. (a) Front view (b) top view
Figure 13. Final project (back view)
Figure 11. Assembly process
(a)
(b) (mm)
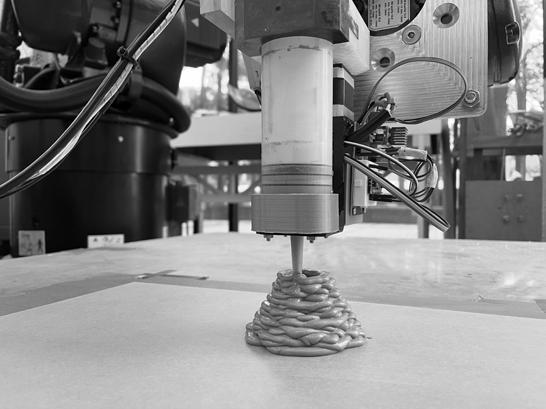
Robotic 3D-Printed Ceramics: Merging Crafts with Digital Fabrication
3D-Printing, Ceramics, Robotics, Toolpath, Digital Fabrication
[Project Description]
An practical exploration of 3D-Printed ceramics with robotic arm, including mechanical design of clay material extrusion, toolpath optimization, and ceramics processing
[Instructor]
Shih-Yuan Wang
[Collaboration]
Hsin Chen, Yi-Ting Lo, Glazeshome
[Research Type] Collective Design Research and Implementation
[Project Year]
2023 - 2024
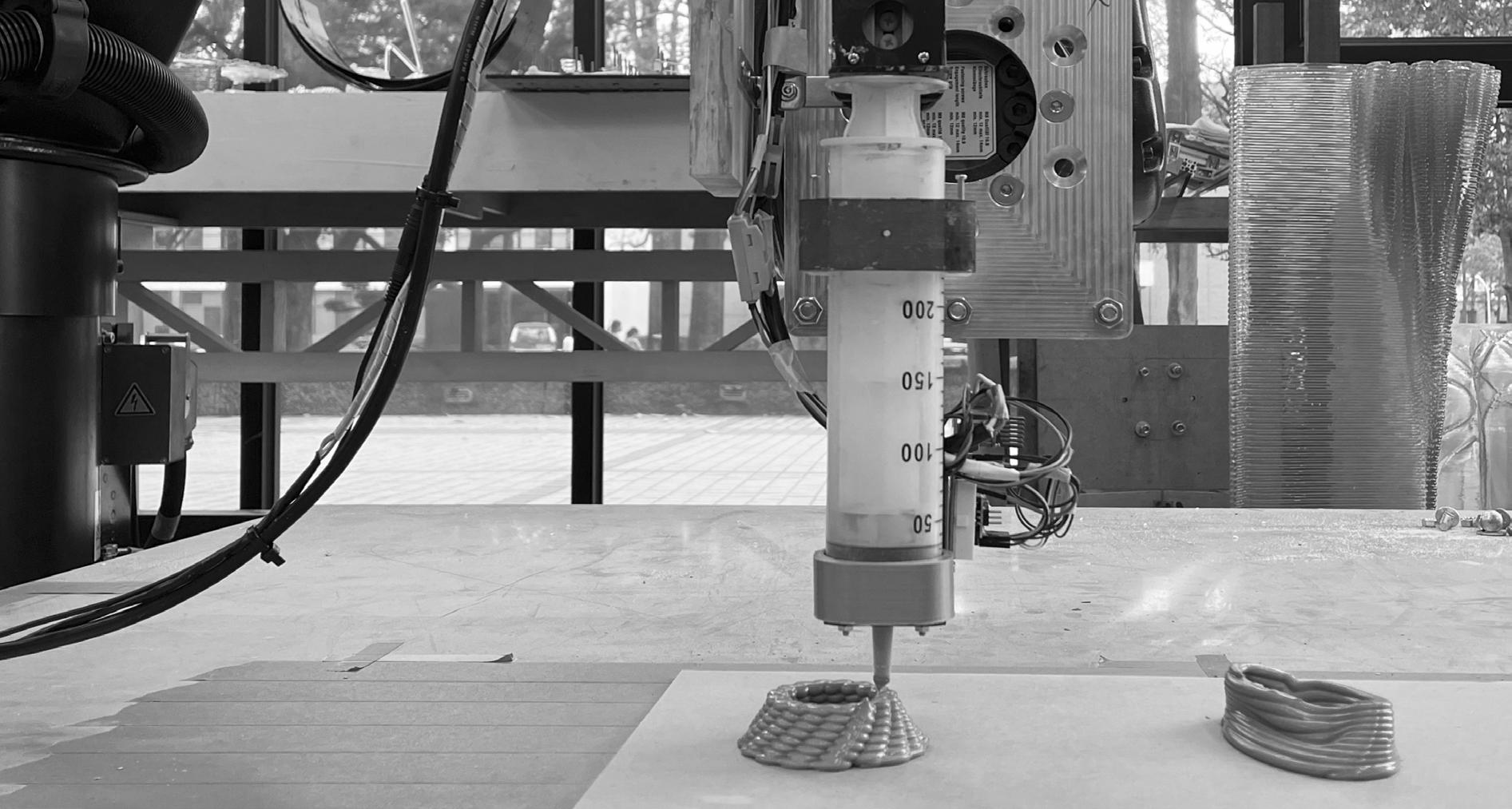
3D-Printing techniques using robotic arm have been gradually applied in current digital fabrication domain. With the robotic manipulation, the manufacturing quality can be precisely controlled. While most 3D-Printing practice often utilize traditional building materials such as concrete, this project aims to explore the potential of clay material extrusion. The design research includes mechanical design of end effector, toolpath computation material experiment, and final ceramics processing, with a specific focus on design-to-fabrication workflow for small-scale 3D-Printed ceramics. The entire trial and error process eventually provides a robust hardware and software settings, which can be further applied to other clay-based project or related 3D-Printing research.
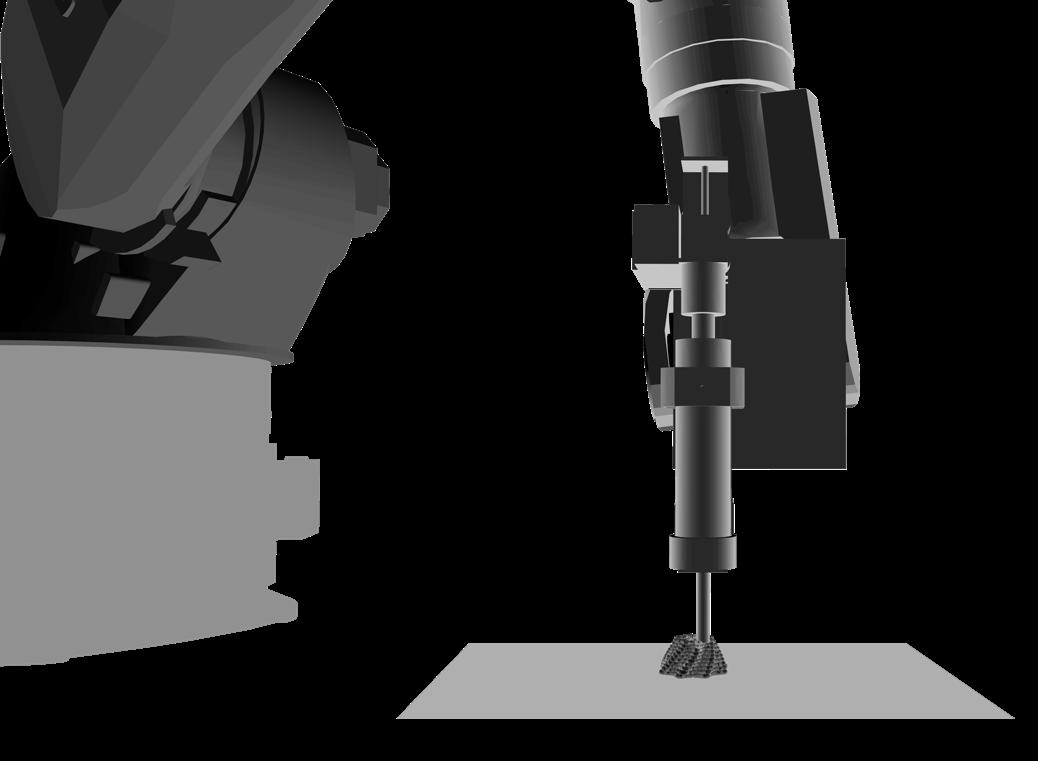
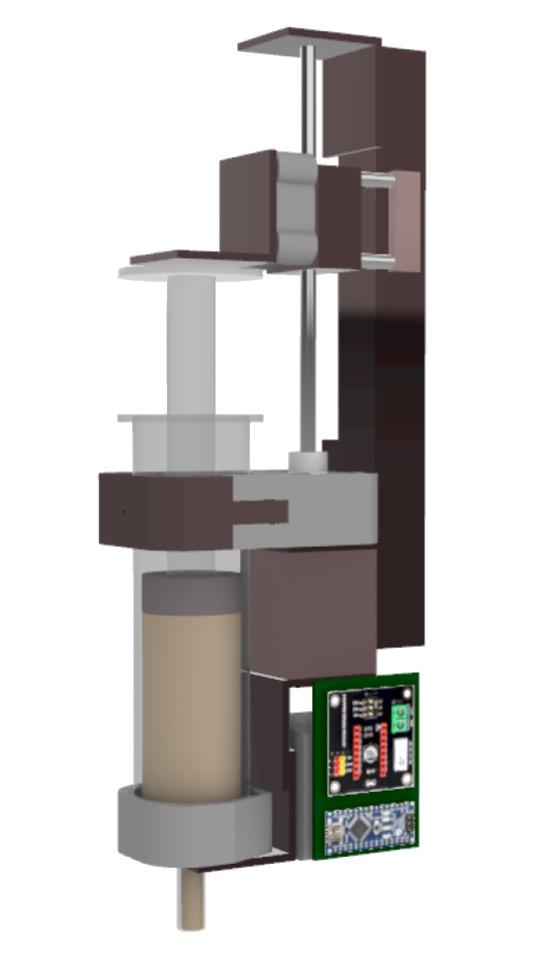
Mechanical Design
(a) robotic arm (b) end effector designed for clay material extrusion
Rotation
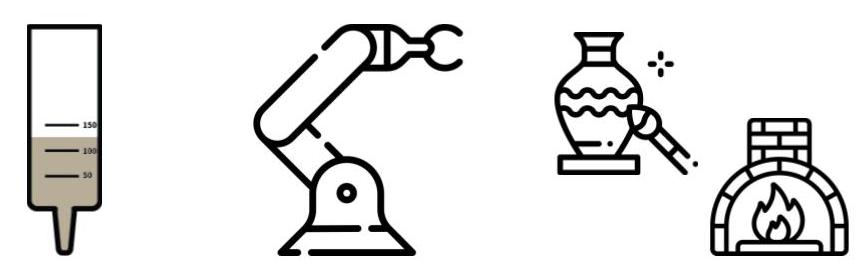
Figure 1. 3D-Printed ceramics approach
(a) wedging
(b) 3D-Printing using robotic arm
(c) glaze and firing
Toolpath Experiment
Linear Slide Rail
Figure 2. Robotic setup
Stepper Motor
Syringe Motor Controller Clay
(a)
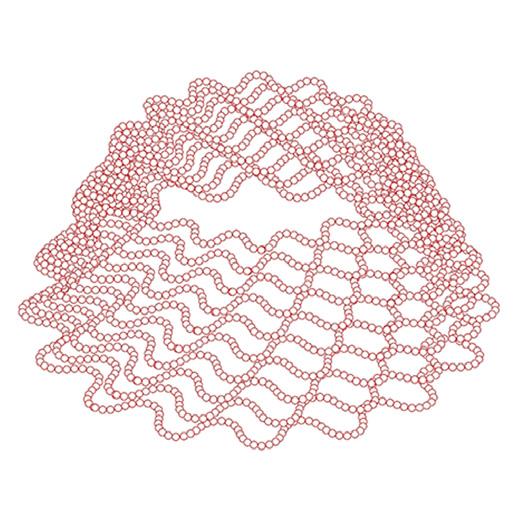
(a)
Figure 3. Computational design (top) and 3D-printing result (bottom)
Ceramics Processing
Bisque Firing (700-900 °C)
Glaze
Glaze Firing (1200 °C)
Figure 6. Detailed photo of ceramics processing after 3D-printing
Figure 5. Exploration of material and form
Figure 4. From computation to robotic operation (a) end effector installation (b) trial and error process (c) final result
(a)
(c)
(b)
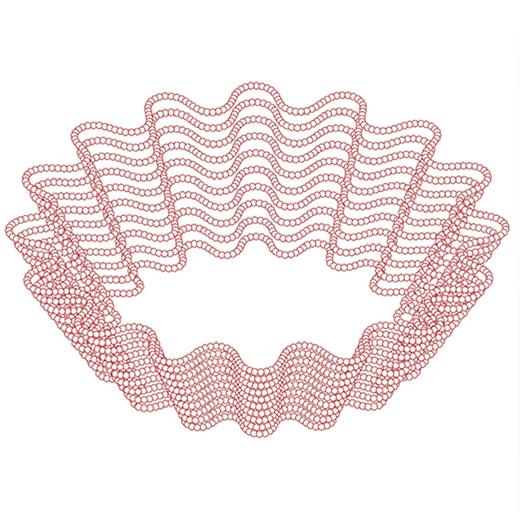
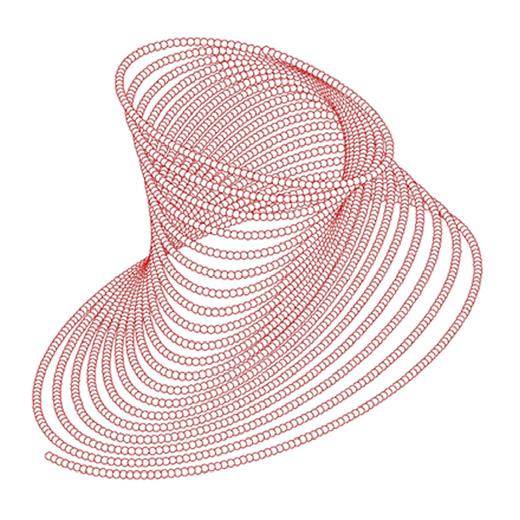
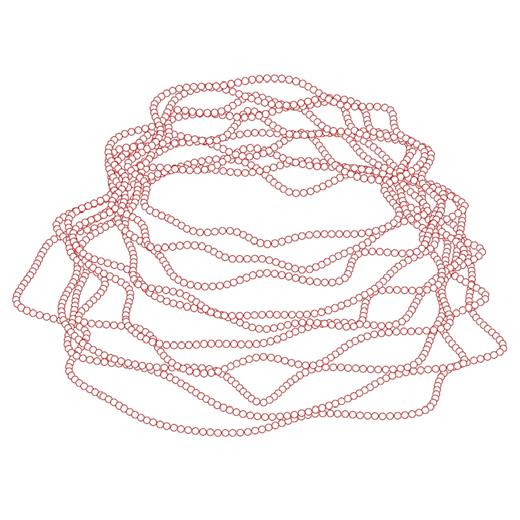
Experimental Result
[Implementation]
Four types of toolpath for clay material extrusion were applied in this research, including rotation, expansion, gradient ellipse, and randomized radius. The expansion case demonstrated the best quality during 3D-Printing and after ceramics processing. The rotation and randomized radius case both showed a certain amount of shrinkage after ceramics processing, which might result from an irresistable thermal or humidity instability. The gradient ellipse case suffered from collapse during 3D-Printing process, which might be related to the exceeding overhang toolpath.