
SAPTASUNUSAE
SCRIPTING +
FOLIOPORTMODELING

2015 Top-ten (NationalfinalistDesign Challenge)
AdobeAdobeAdobeAdobeAdobeLumionSketchUpAutodeskAutodeskAutodeskVrayGrasshopperRhinocerosPythonMayaAutocadRevitPhotoshopIndesignIllustratorAfterEffectsPremiere

DISTINCTIONS
2017 Exploring Underground Gallery’s Aesthetics Using Five Human Senses
2019 Non-Architecture Competition Finalist (Alternative Designs for Cemeteries)
SCHOLASTICSurabaya
SUNUSAE 2022 00
2019PUBLICATIONS
2014 Funded research paper (PKM-GT)
email : sunusaesapta@gmail.com phone : +447311115745
Genosense [Non-architecture, Dying]
PT. DWI MARTHA JAYA [Project DevelopArchitect]designfor Theme Park, Autocad drafting, monitor the progress/changes at site.
SAPTASUNUSAE
2019 LPDP Awardee
Create[Architect]amasterplan for housing complex, design each house unit.
MScEDUCATIONComputational Methods in Architecture
Cardiff University
SKILLS
WORKEXPERIENCES
JAVA ARCHITECT [Junior Architect]
PT ARCHIMETRIC [Architectural Intern]
Design a masterplan for housing complex, design hotel facade, Autocad drafting.
MULTI ABADI SAKTI [Part-Time Interior Designer] Design interior layouts for fashion store.
Bachelor of Engineering

Sepuluh Nopember Institute of Technology (ITS) -
Design an indoor garden for UNTAG Universi ty - Surabaya, Autocad drafting for highrise building.
JARDINSLAND
linkedin : sunusae-61681410alinkedin.com/in/saptainstagram : @saptasunu
NODAL SCRIPTINGGRAPHCLASSIFICATIONDISPLACEMENTWITHML
THEMERDEKAWorkshop]THEDANCEMODELINGTOTHERHYTHMVILLA[MarianaCabugueiraPARKMEDANSHELTER
PEDESTRIAN PATH GENERATOR
CONTENTS
SUNUSAE 2022 01


02 SUNUSAE 2022
PEDESTRIAN PATH
APPSGENERATOR: Rhino IronGrasshopper3DPython

COMPONENT 2


ENVIRONMENT
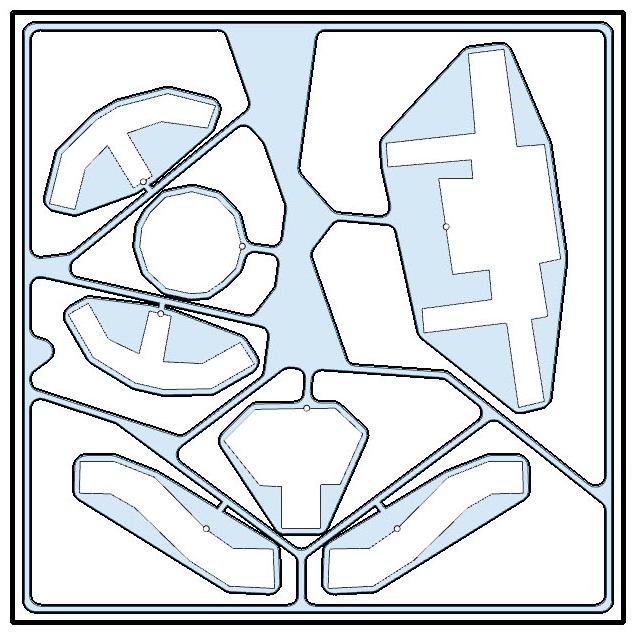
The objective of the study is to help designer to generate pedestrian path within a cluster of build ings. To achieve this, case study is used as an approach to understand the algorithm of efficient pedestrian way. Subsequently, the algorithm will be written using python programming language in rhinoceros 3D and grasshopper environment. To generate pedestrian path, the algorithm will con sists of two components.
03 SUNUSAE 2022
The second component will offset each middle line created from the first component, and cre ate additional path as an access to each build ing.
COMPONENT 1


The first component aims to create middle line between each two buildings.

04 SUNUSAE 2022 FLOWCHARTCOMPONENTFIRST


05 SUNUSAE 2022 FLOWCHARTCOMPONENTSECOND

PROCESSDIAGRAM


#Average Closest Points #Middle Lines #Offset Convex Hull #1st Line Extension #2nd Line Extension #3rd Line Extension #Intersect Lines & Boundaries #Trimmed Lines (xcurves) #Intersect Brep and Lines #Offset Boundary #Closest Points To Lines #Pedestrian Way 090501









06 SUNUSAE 2022

ITERATION
07 SUNUSAE 2022RESULT & DISCUSSION
04 | radius : 100 m ITERATION 05 | radius : 140 m


[ Building Range ]




02 | radius : 30 m
GEOMETRY | closed curve, point
03 | radius : 50 m
ITERATION
ITERATION STUDY_01
01 | radius : 20 m CASE
INPUT
ITERATION
[ Pavement Value ] ITERATION 01 | pavement value : 0 ITERATION 02 | pavement value : 15 ITERATION 03 | pavement value : 25 ITERATION 06 | pavement value : 50ITERATION 05 | pavement value : 40ITERATION 04 | pavement value : 30





CASESTUDY_01
08 SUNUSAE 2022RESULT & DISCUSSION
09 SUNUSAE 2022RESULT & DISCUSSIONITERATION 01 | r: 36 m ITERATION 02 | r: 45 m ITERATION 03 | r: 50 m ITERATION 04 | r: 80 mINPUT | SITE 01 INPUT | SITE 02 ITERATION 01 | r: 30 m ITERATION 02 | r: 40 m ITERATION 03 | r: 50 m ITERATION 04 | r: 120 m INPUT | SITE 03 ITERATION 01 | r: 40 m ITERATION 02 | r: 50 m ITERATION 03 | r: 70 m ITERATION 04 | r: 170 m CASESTUDY_02 [ Site Input ]















10 SUNUSAE 2022RESULT &
Output of the first component is a collection of lines (xcurves) to split a surface within the site boundary. While it works as ex pected in the second component, the extended lines in some corners tend to mislead user that the xcurves will create pedes trian path in a different way as depicted in the second diagram (what user thinks).



xcurves what user thinks what user gets
LIMITATIONS
RESULTDISCUSSION&DISCUSSION
In order to perform well, both of the component needs the right range of number input, otherwise it will easily create an error. Some of the geometries input sometimes fail to load in the components. There is also case when a function inside the compo nent does not work and when the rhino 3d and grasshopper restarted, it just works fine. This will confuse the user as the error probably caused by the lag/bug of some import functions inside the script.
11 NODAL APPSGRAPHCLASSIFICATIONDISPLACEMENTWITHML: Rhino IronSverchokBlenderGrasshopper3DPython SUNUSAE 2022

In this step, space frame design variants and its structural simulatiion data is stored as a csv file.


SYNTHETIC DATA GENERATION

ENVIRONMENT
12 SUNUSAE 2022
ML TRAINING & PREDICTION
The dataset created in the first step will feed the graph ML for training and prediction.
Graph Machine Learning (ML) which is based on graph theory, uses the same method to construct ML model. It allows user to embed features into the node and edge. The task of ML on graph varies from node classification, link prediction, to a whole graph learning for classification, regression, and clustering. This research focuses on the application of graph ML to perform nodal classification in space frame structure based on multiple structural simulation precedents. The method consists of two steps, synthetic data generation and ML training-prediction. The first step will be done in Rhino-grasshopper with Karamba3D. While ML training and prediction is per formed in Blender with Topologic add ons.

A. DESIGN GENERATION
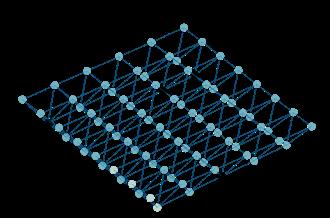
SPACE FRAME GENERATION



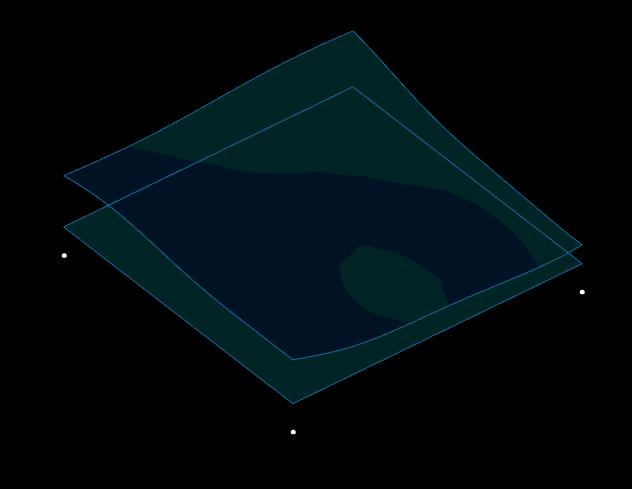
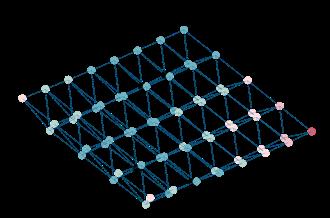
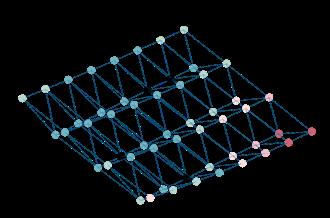
Space frame structure design is generated from top and bottom surface in size of 10x10 m (wide x length). There are 3 parameters used to gener ate space frame design variants which are top surface undulation, UV division and support points selection for the bottom surface.


UV Division
SYNTHETIC DATA GENERATION


13 SUNUSAE 2022
TOP SURFACE UNDULATION (PERLIN NOISE ALGORITHM)





The other parameter is the number of UV division. Figure 6 shows the minimum number of UV division, while figure 7 shows the maximum. Finally, the last parameter is support points that selects four points on bottom surface randomly (figure 8).
To create a smooth fluctuation on the top surface, Perlin noise algorithm will be used. Figure 5 shows the comparison of Z value randomization between random component in grasshopper and perlin noise algorithm.
The other parameter is the number of UV division. Figure 6 shows the minimum number of UV division, while figure 7 shows the maximum. Finally, the last parameter is support points that selects four points on bottom surface randomly (figure 8).
Support Point Selection
KARAMBA 3D OUTPUT
14 SUNUSAE 2022
All the design variants from previous step will undergo this simulation.

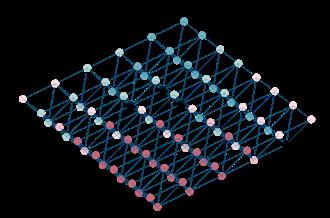
NODAL DISPLACEMENT COMPONENT OUTPUT
B. NODAL DISPLACEMENT SIMULATION


Karamba 3D uses finite element (FEA) method for its structural analysis. In this case, FEA will be used to calculate nodal displacement after applying gravity as a load force. The default output from this grasshopper add-ons for this type of analysis is translation vector for each node. Hence, python script component is used to convert those value into a translated node and classify the displacements into five cate gories (figure 10). The visualisation from Karamba3D is represented by colour gradient on steel rod (figure 9), while the developed component in this research highlights the nodal displacement by coloured spheres (figure 10).

Below
1024 Space Frame Variants
are 50 samples of space frame design variants, in total there are: 15 SUNUSAE 2022







100863 Nodes 346112 Edges 1 Graph



































C. DATASET PREPARATION
NODES.CSV

To construct a DGL graph, two separate CSV files containing nodes and edges data are required.

Deep Graph Library (DGL) is able to generate graph from Comma Separated Value (CSV) file. One space frame design and its node dis placement simulation result are typically easier to be represented as single graph. As a result, the dataset will have multiple graphs as many as the number of space frame variants. However, since the node classification commonly takes only one graph as dataset, all of the design variants from previous step will be flattened into one large graph.
16 SUNUSAE 2022
EDGES.CSV
B. Learning Rate
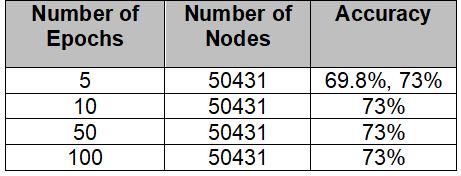
Number of epochs defines the number of iterations through dataset for each complete loop (Alyimani, 2022). With the current setting of testing ratio of 10%, learning rate of 0.01, 16-layer width, four different number of epochs were tested.
The nodes and its supervised result are divided into training, validation, and testing mask. 512 flattened graphs are used in three different mask ratios. The third setting with 70%, 20% and 10% for training, validation and testing respectively has significantly higher accuracy compared to the other two ratio adjustment as shown in table 1. Hence, this setting will be a base mask ratio for the next experiment.


E. Number of Nodes

C. Number of Hidden Layer (HL) and HL width

RESULT AND DISCUSSION
D. Number of Epochs
Four learning rates were experimented in this case. It shows that by in creasing the learning rate noticeably improves the prediction accuracy. In table 2, using the testing mask ratio of 10% from previous experiment, it appears that 0.01 is the learning rate that reach the maximum accu racy (69.8%). The prediction accuracy stops increasing when the learn ing rate is set to 0.1. Hence, learning rate 0.01 which is the base setting of initial condition is still used for subsequent experiments.
A. Training / Validation / Testing Mask Ratio
The final experiment is not part of hyperparameter, rather increasing the number of datasets which in this case, the number of nodes. The hyperparameter final setting is as follows: learning rate; 0.01, number of epochs; 10, and hidden layer is set to single with 16-layer width.
17 SUNUSAE 2022
Varying the number of hidden layer and its width did not improve the accuracy. Five experiments were done by adjusting the number of con volutional layers as one or two.
APPS : Rhino Grasshopper3D 18 SUNUSAE 2022

DANCE TO THE
[GROUPRHYTHMPROJECT]


This form finding process is based on the interpretation of dance movement from Fred Astaire and Ginger Rogers. The general purpose of this project is to learn about minimal surface which is generated by kangaroo add ons in grasshopper.


Ginger : Dynamic, flexible
Each frame is offseted. Trim each offseted frame. Add diagonal plane as a base structure to stand in all direction of box sides.
The first form finding process is to rotoscope the dance movement of Fred and Ginger. Polygon is created from achor point of head, hand and feet of Fred. While from the female side, Ginger’s dress is rotoscoped as it captures dynamic movement and flexibility.

The limitation is 25cm cube box. Fred’s frame is placed parallely within the box size
19 SUNUSAE 2022
Fred : Rigid, structure
Split the surfaces from Fred’s frame and diagonal planes. Now the diagonal planes are separated into 4 parts.



#FRED_AS_STRUCTURE#ROTOSCOPING



Final form of support slit joints.
Create another edge with pol ygon section slit
#1
4 cm offset into inner direction .
#2
#3
#4
4 Parts of diagonal surface

#5
#STRUCTURE_DEVELOPMENT
New edges created with the reference of tween curves.
#6
20 SUNUSAE 2022
#7
Offset 3 cm from outer edge
Cavity edge created from the outer edge and middle offset line
#8
Tween curves between: Cavity edge Slit (Interpretationedge of Ginger dress)
#FINAL_MODEL 21 SUNUSAE 2022


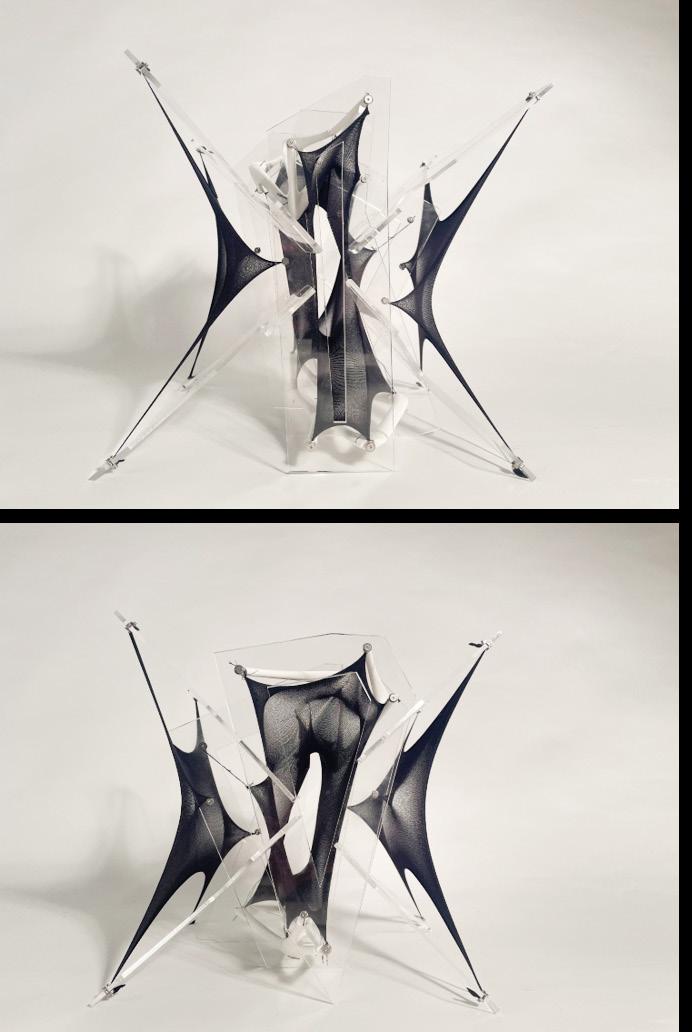
APPS : RhinoMaya V-Ray3Dfor Rhino 22 SUNUSAE 2022
THE VILLA Mariana WorkshopCabugueira
The workshop is held online by Mariana Cabugueira, senior architect at ZHA. Participants learn to use Maya to de sign a villa with low poly modeling technique. Rendering is done by V-Ray in Rhino.

PROCESS#CreateDIAGRAMthreetorus01 02 03 04 05 06
#Modify based on needs
#Extrude to create base
#Adjust the height of each torus





#Slice the torus
#Create bridge of each edges
23 SUNUSAE 2022
24 SUNUSAE 2022




25 SUNUSAE 2022

MERDEKA PARK MEDAN
APPS : Rhino Grasshopper3D SUNUSAE 2022

A. HISTORICAL AREA DEVELOPMENT A1. Proclamation Monument A2. Ocean Plaza B. TOD AREA DEVELOPMENT B1. Transit Area B2. Amenities C. CEREMONIAL AREA DEVELOPMENT C1. Pendopo (Hall) C2. Field 27 SUNUSAE 2022

28 SUNUSAE 2022

29 SUNUSAE 2022
Each modul will be inserted into platform.

APPS : Rhino V-RayGrasshopper3DforRhino
THANKYOU

Bramley, E.R. 2018. Desire paths: the illicit trails that defy the urban planners. Available https://www.theguardian.com/cities/2018/oct/05/desire-paths-the-illicit-trails-that-defy-the-urban-plannersat: [Accessed: 16 March 2022].
Aschwanden, G. 2007. Agent-Based Social Pedestrian Simulation for the Validation of Urban Planning Recommendations. Proceedings of the 16th Iberoamerican Congress of Digital Graphics. Fortaleza; Brasil, 13-16 November 2012. Available at: http://papers.cumincad.org/cgi-bin/works/paper/sigradi2012_26 [Accessed: 22 May 2022].
Mannan, A.V. and Uddin, M.S. 2007. Natural behaviour and computational logic for optimization of architectural design. 25th eCAADe Conference Proceedings. Frankfurt; Germany, 26-29 September 2007. Available http://papers.cumincad.org/cgi-bin/works/paper/ecaade2007_021at: [Accessed: 17 March 2022].
Levyant, V. 2020. Force Prediction for Surface-Approximating Spaceframes using Graph Neural Networks. MSc Dissertation. Cardiff University.
Alymani, A., Jabi, W and Corcoran P. 2022. Graph machine learning classification using architectural 3D topological models. Available at: https://journals.sagepub.com/doi/full/10.1177/00375497221105894 [Accessed: 07 August 2022].
Kipf, N.T and Welling, M. 2017. Semi-Supervised classification with graph convolutional networks. Available at: https://arxiv.org/abs/1609.02907 [Accessed: 07 August 2022].
REFERENCE
Jabi, W et al. 2018. Topologic: tools to explore architectural topology. Available https://www.researchgate.net/publication/327891111_Topologic_tools_to_explore_architectural_topologyat: [Accessed: 08 August 2022].
