I am a computational designer with a background in architecture and experience in digital fabrication, additive manufacturing, and robotic fabrication. Utilizing advanced design and fabrication techniques, I develop innovative solutions for a wide range of projects.
Table of Content
Pick & Place 01 02 03 05 04
Additive Manufacturing
3D Printing Plastic and Clay
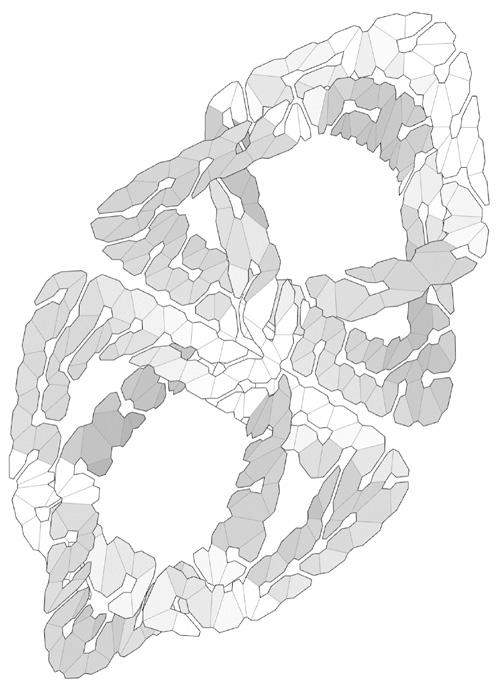
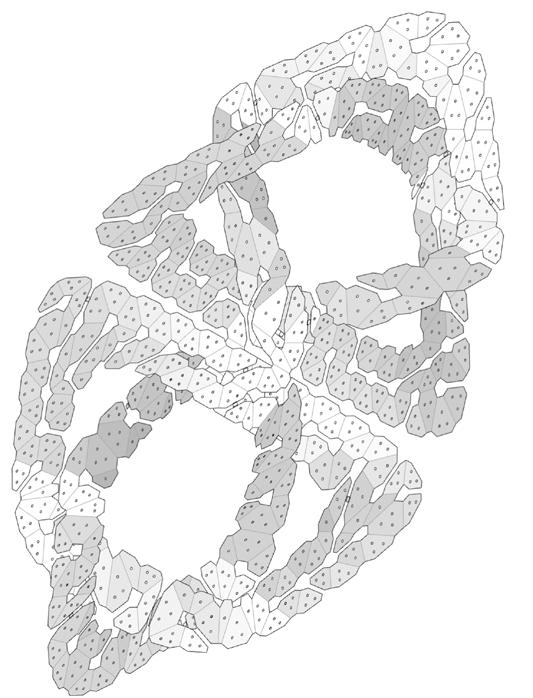
Graph-Based Mesh Panelization
CNC Cut - Augmented Reality
Incremental Sheet Forming
Robotic Fabrication
Robotic Assembly
Soft Robotic Solar Facade
Soft Pneumatic Actuators
- 01 -
Additive Manufacturing
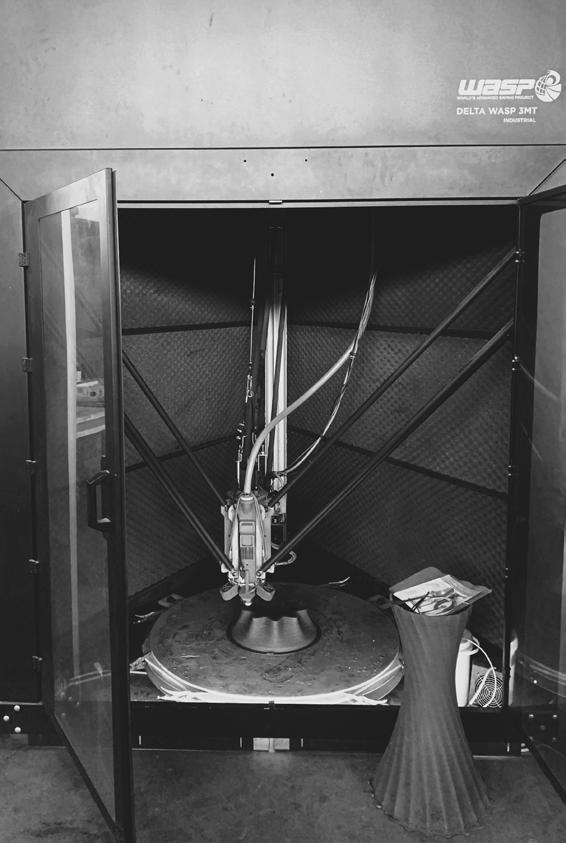
3D
Printing Plastic and Clay
SMAC Summer School
Supervisor: Stefano Giovacchini
Software: Rhino - Grasshopper
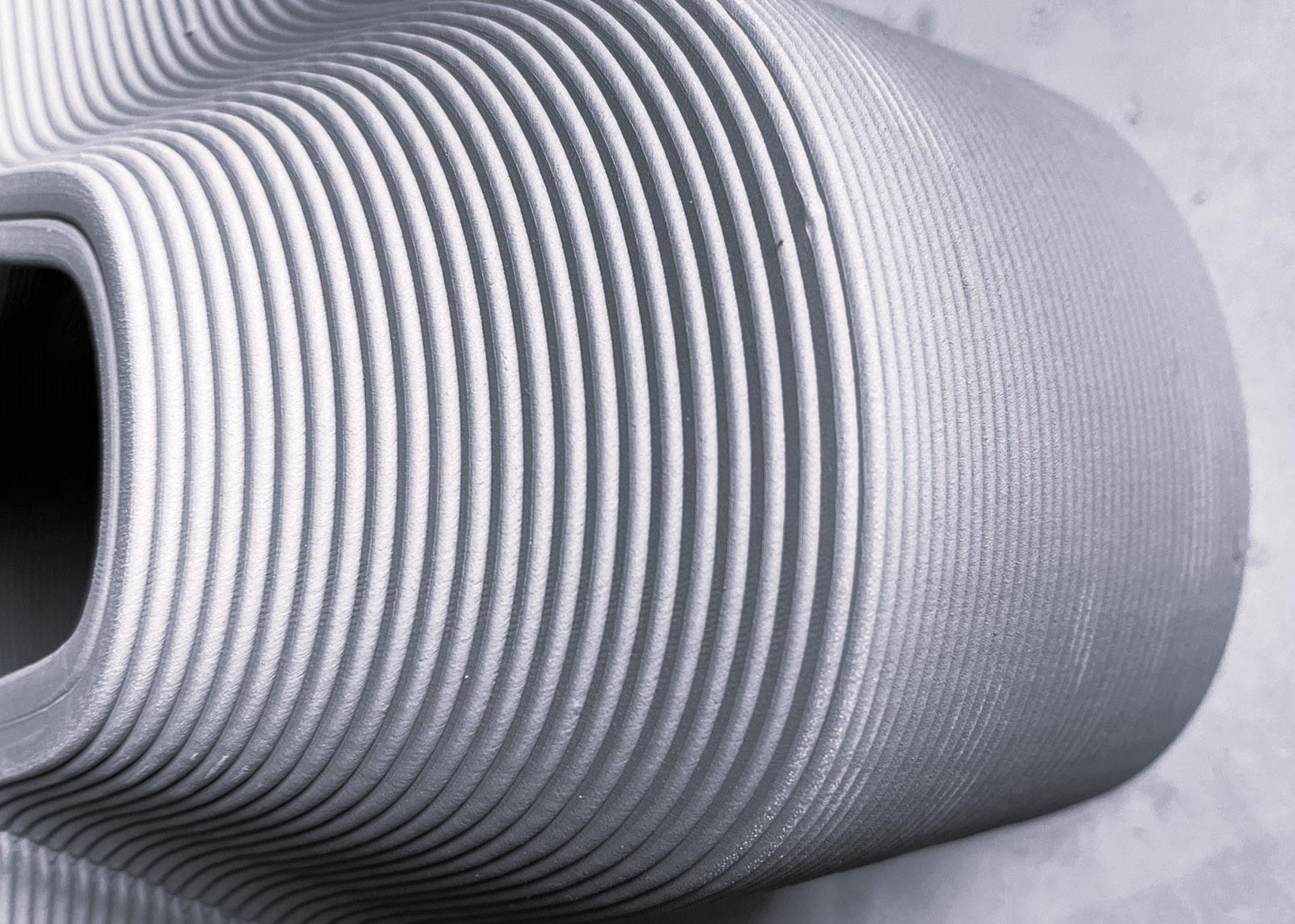
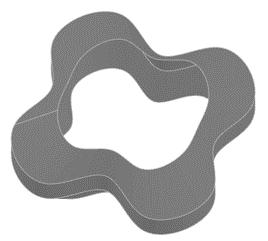
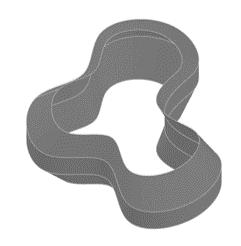
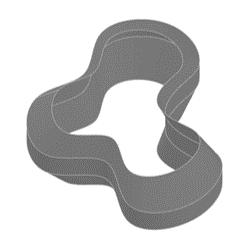
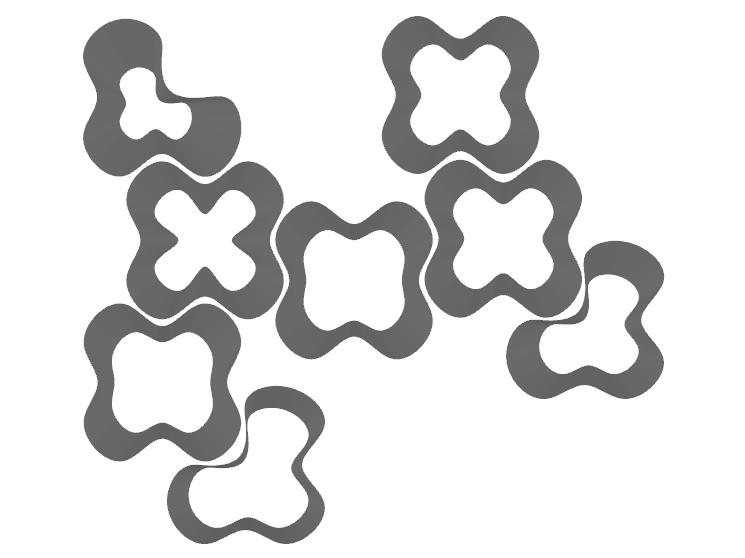
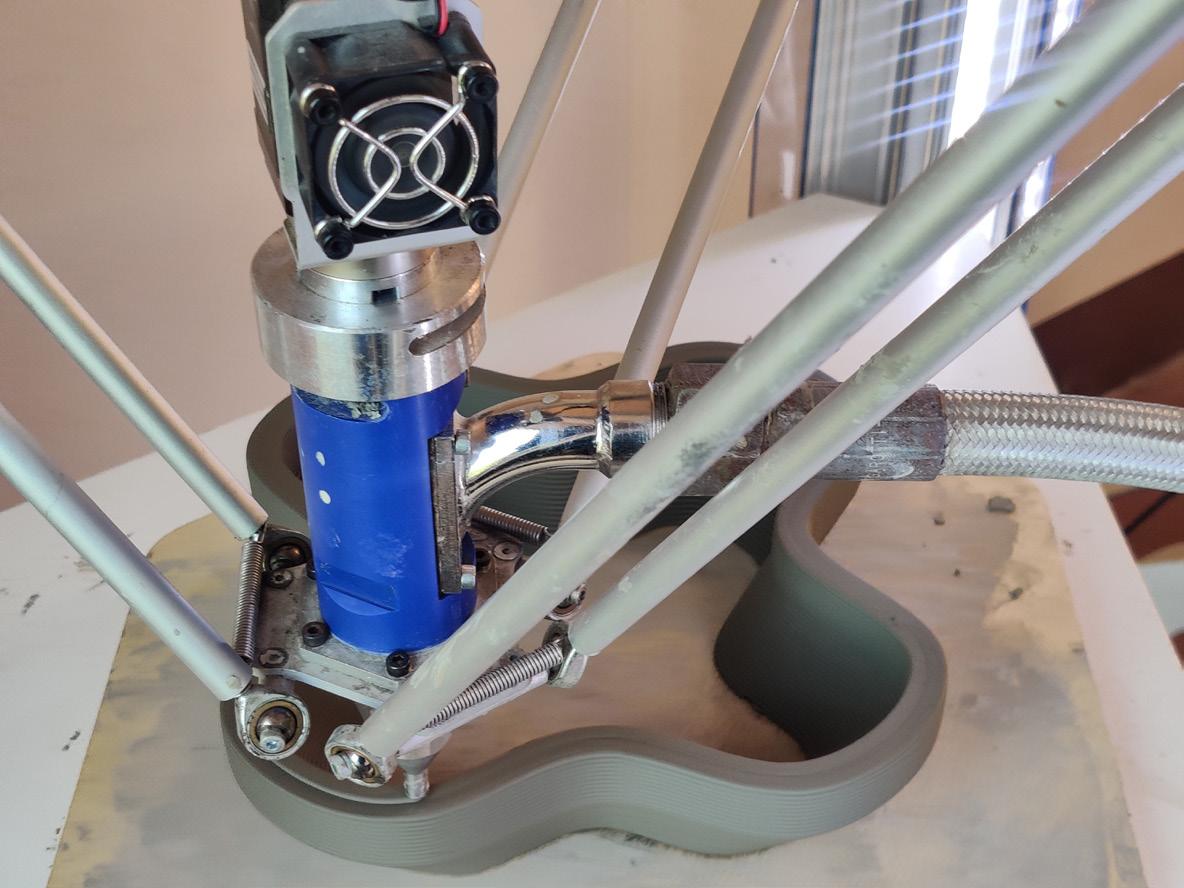
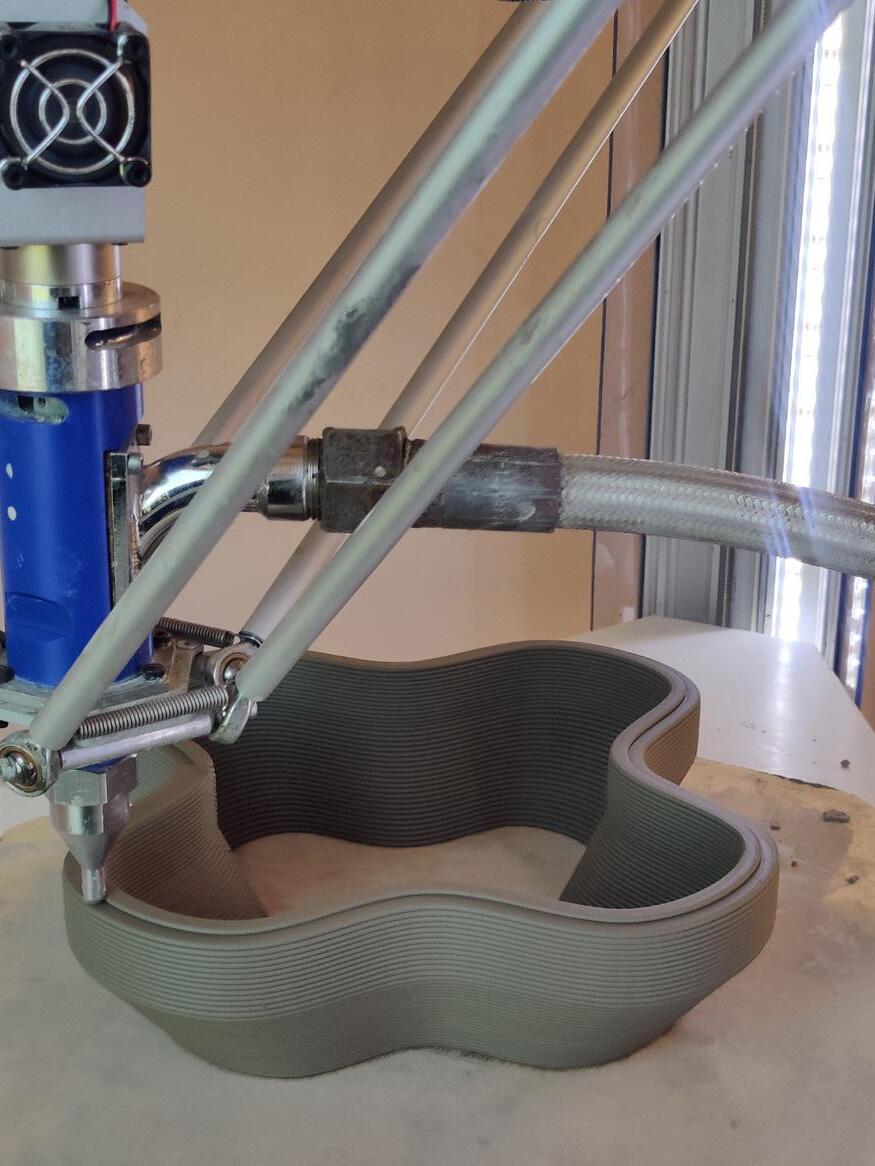
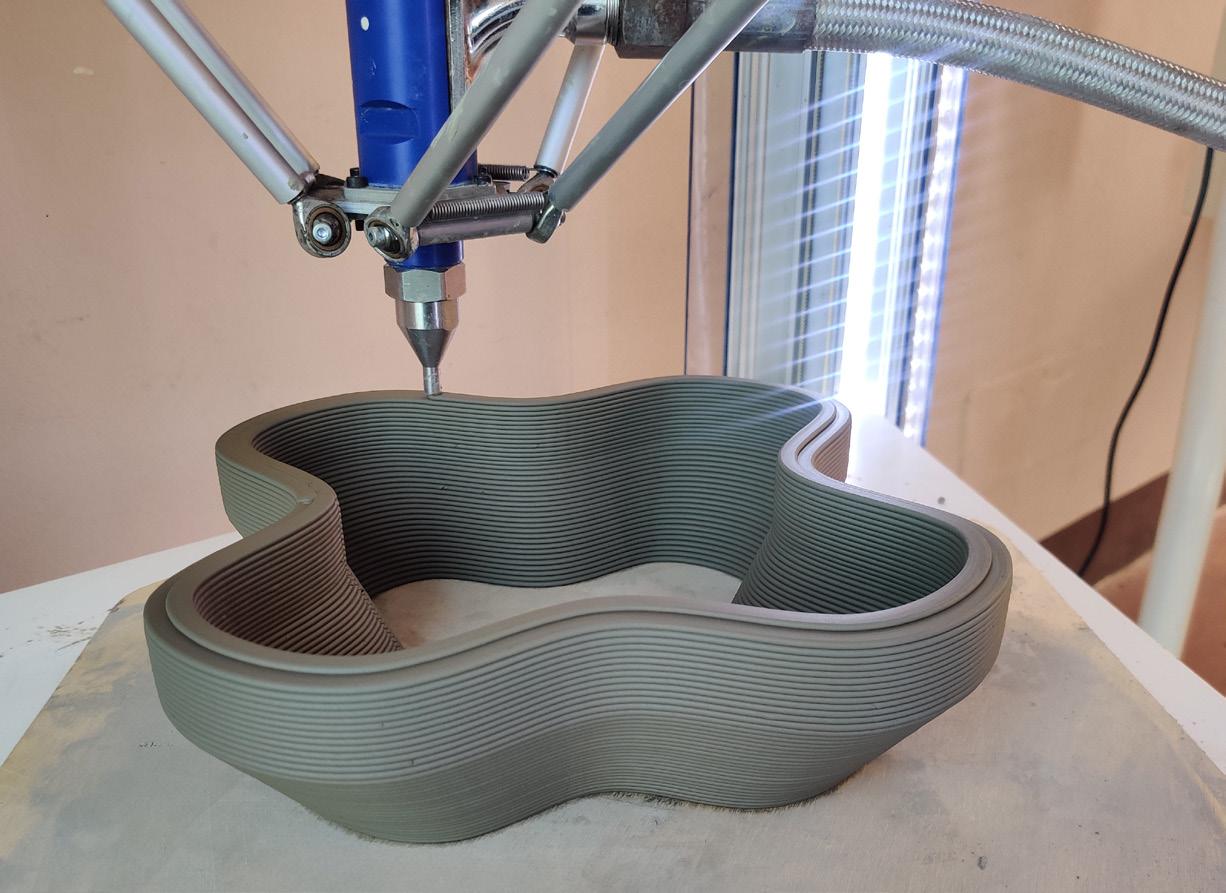
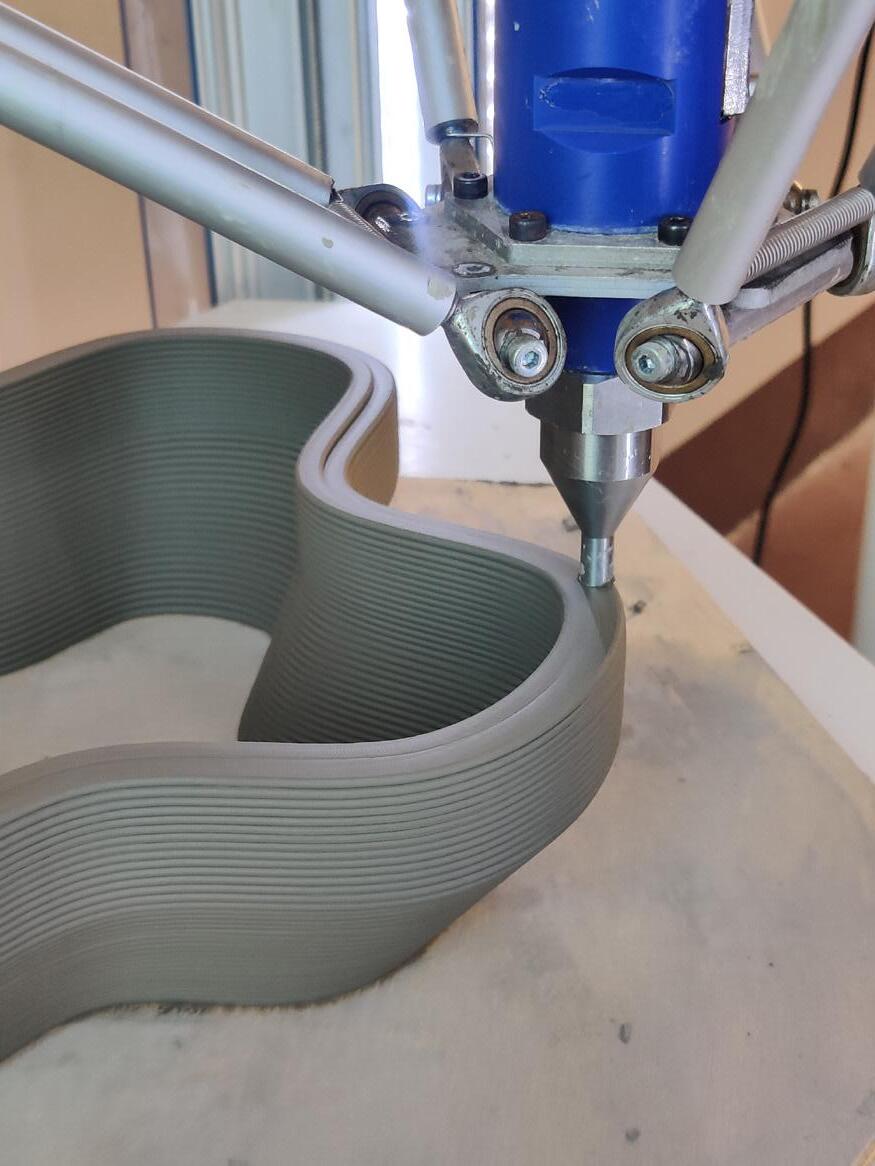
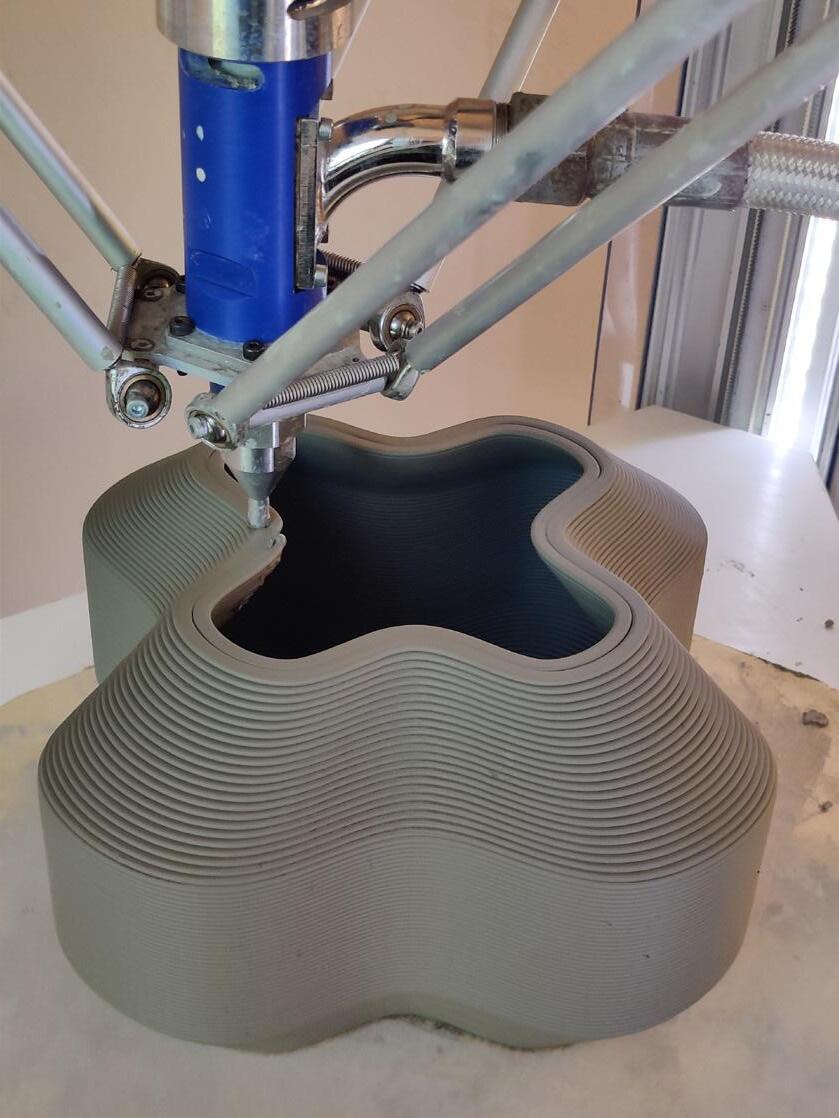
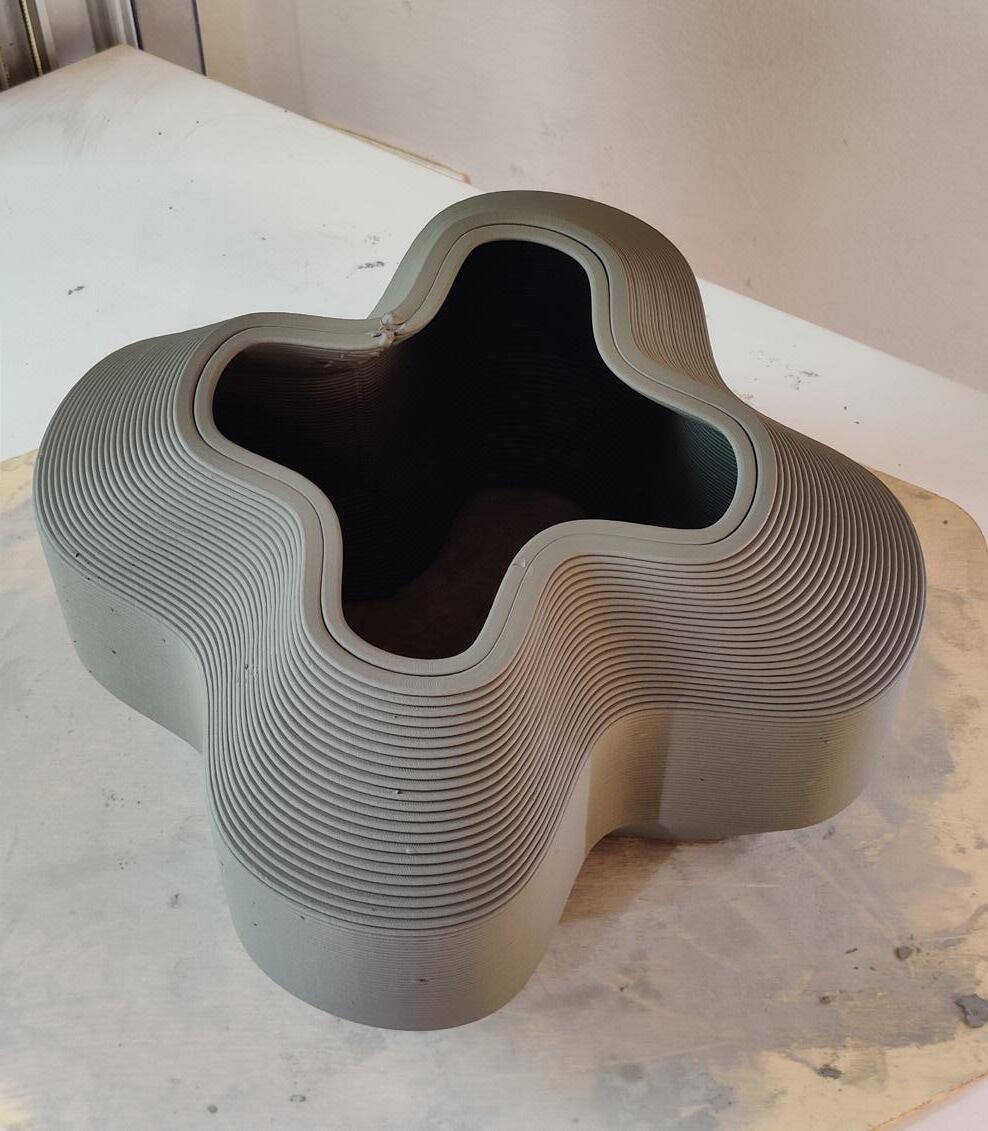
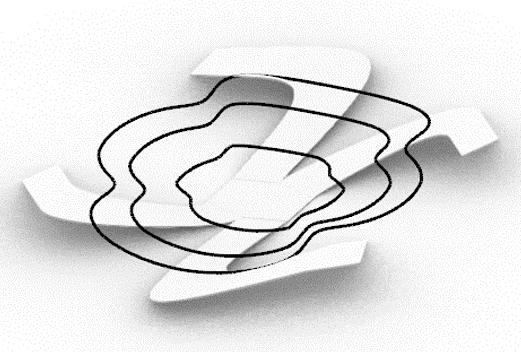
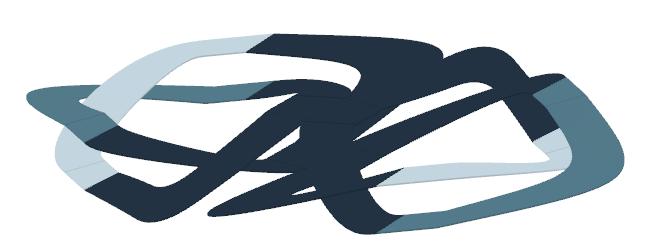
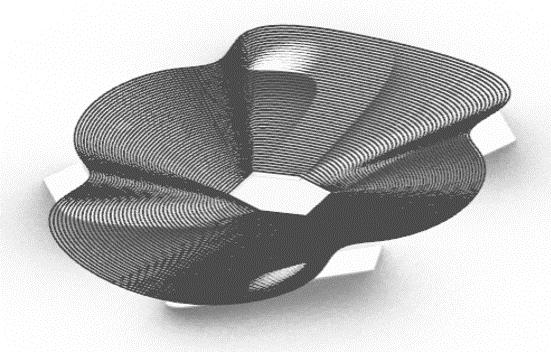
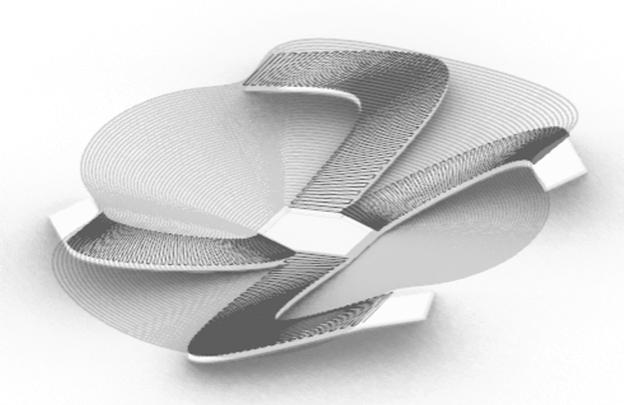
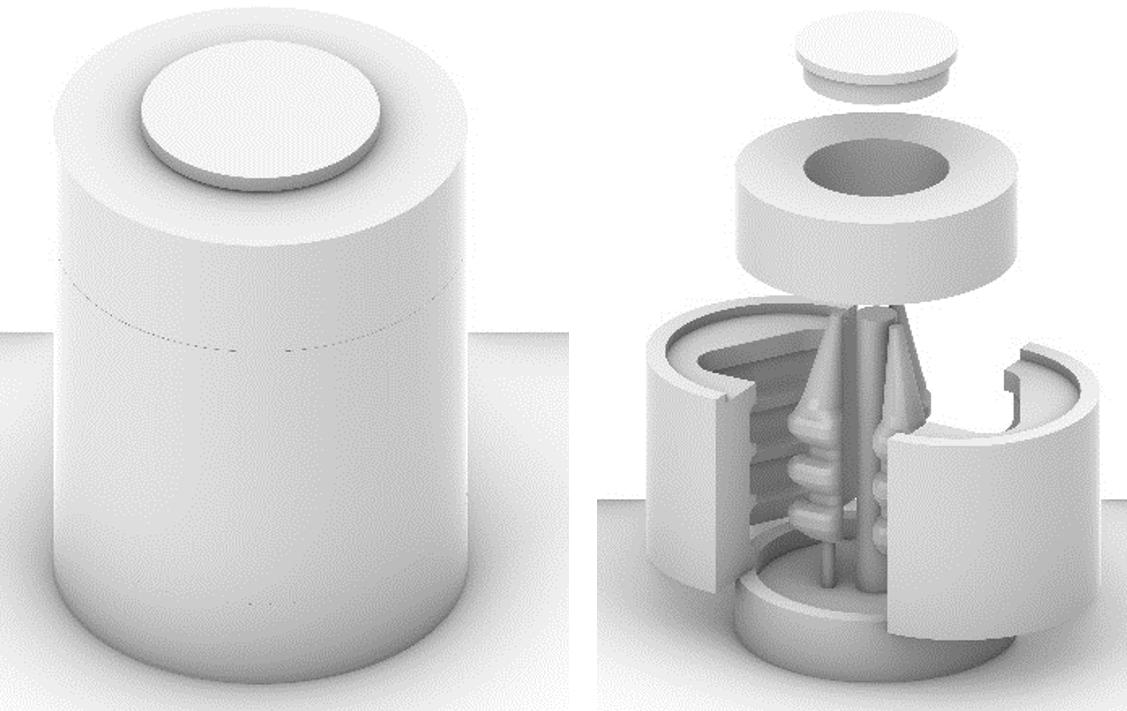
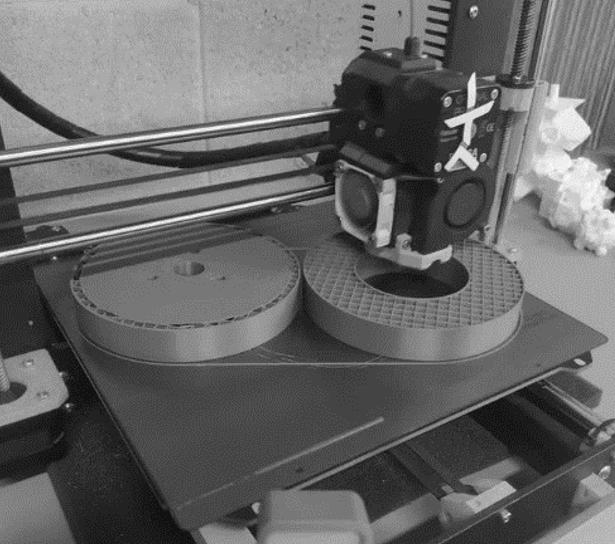
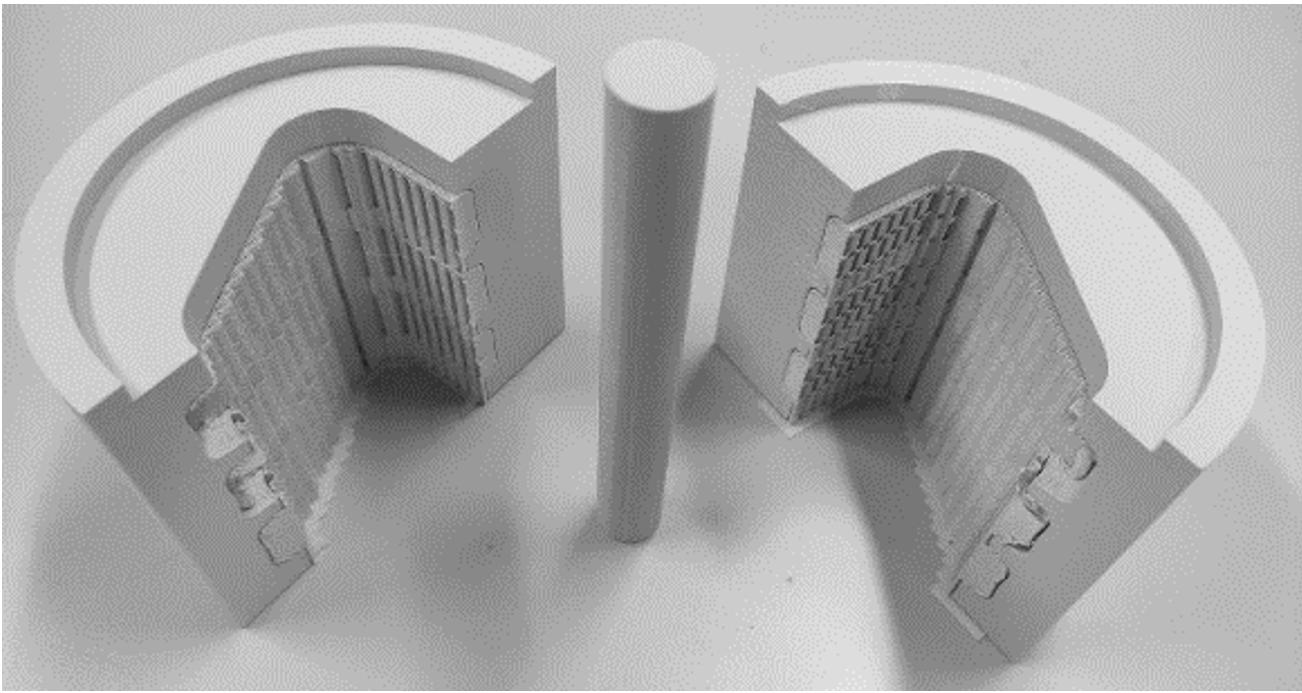
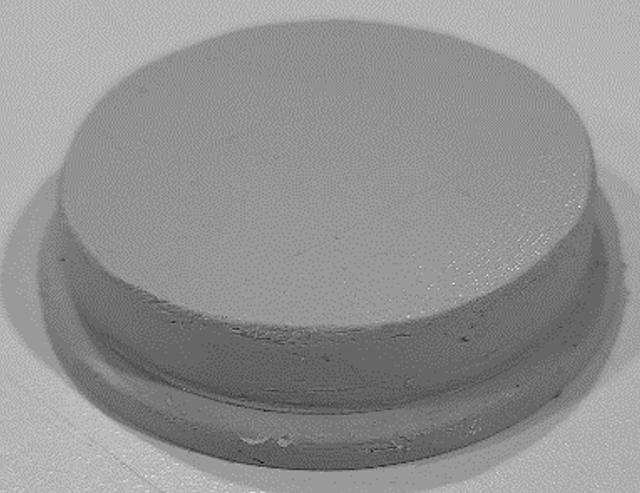
During this summer school, we delved into additive manufacturing using both clay and plastic, exploring their possibilities, limitations, and various applications. I developed two projects—one for clay and one for plastic— that initially followed the same concept. However, after evaluating the unique characteristics and limitations of each material, I made specific modifications to adapt the designs. Both systems were developed with the potential to function as facade systems or integral components of one.
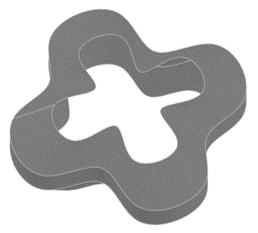
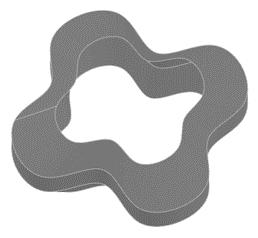
Designed Geometry
Contouring
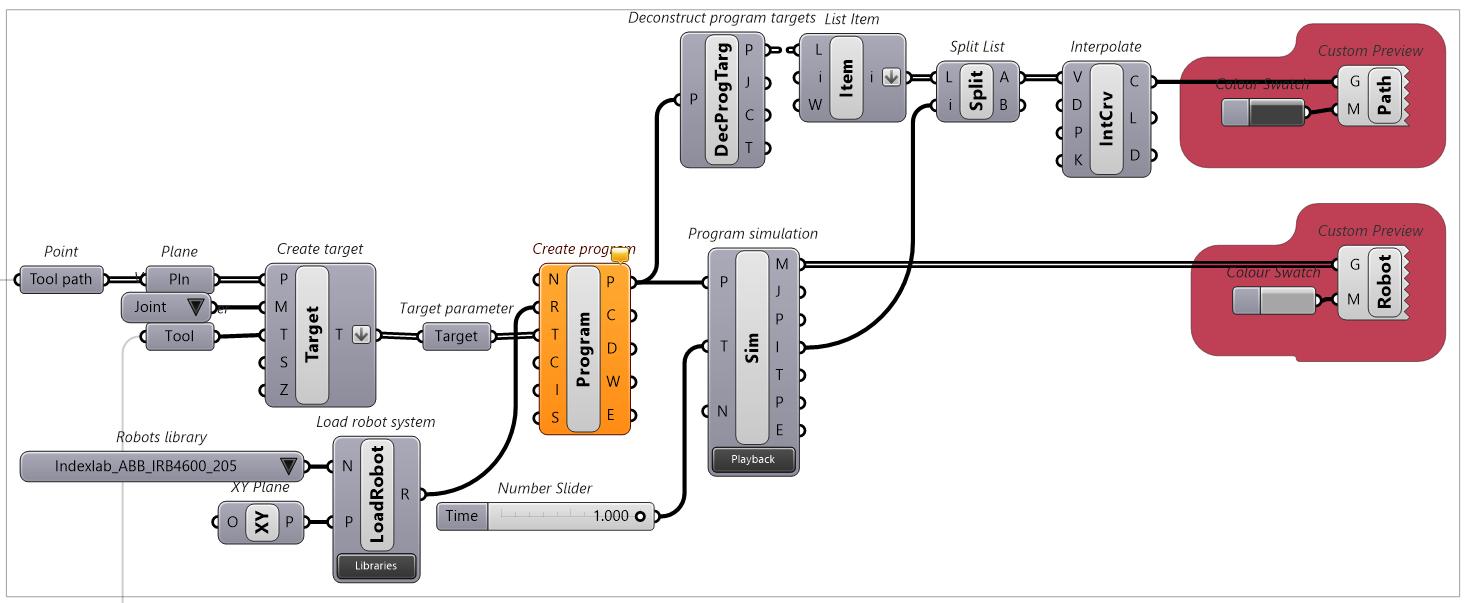
Tool Path planes
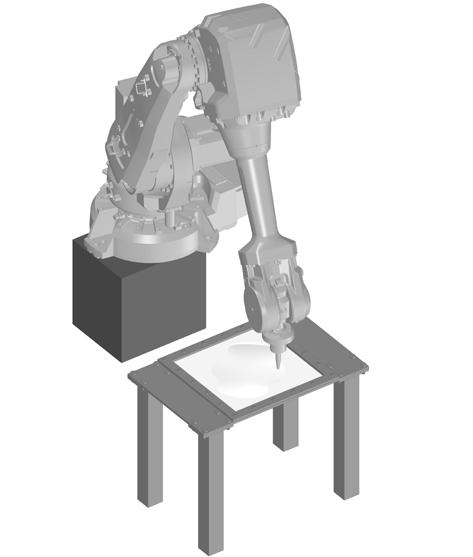
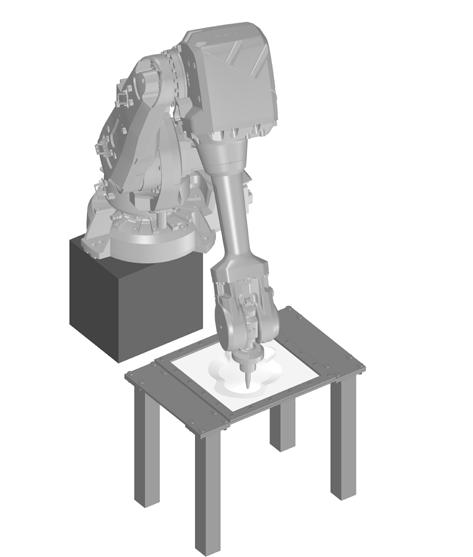
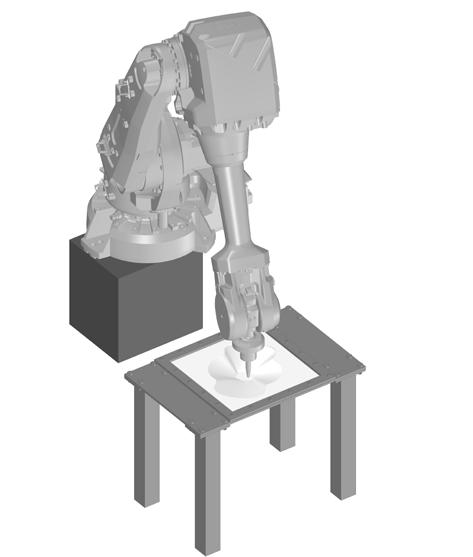
Process Simulation
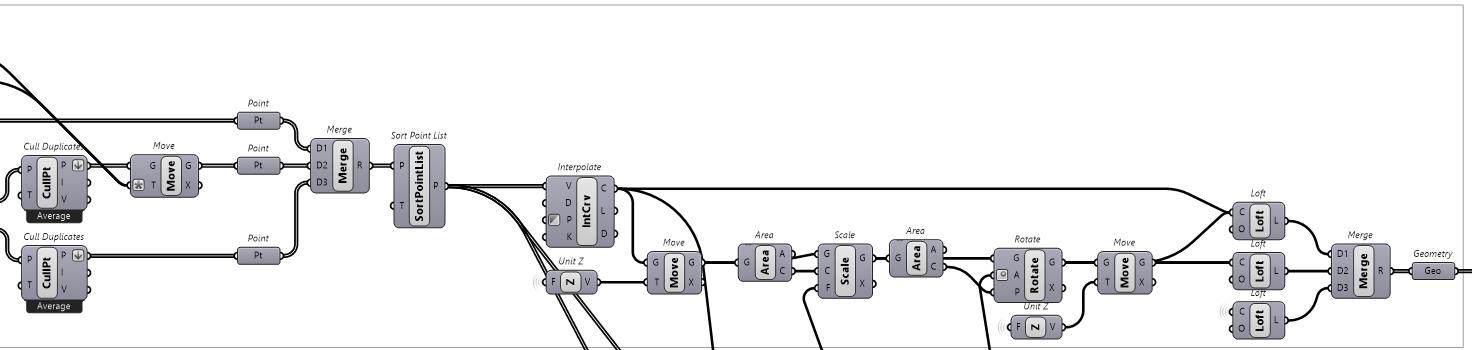
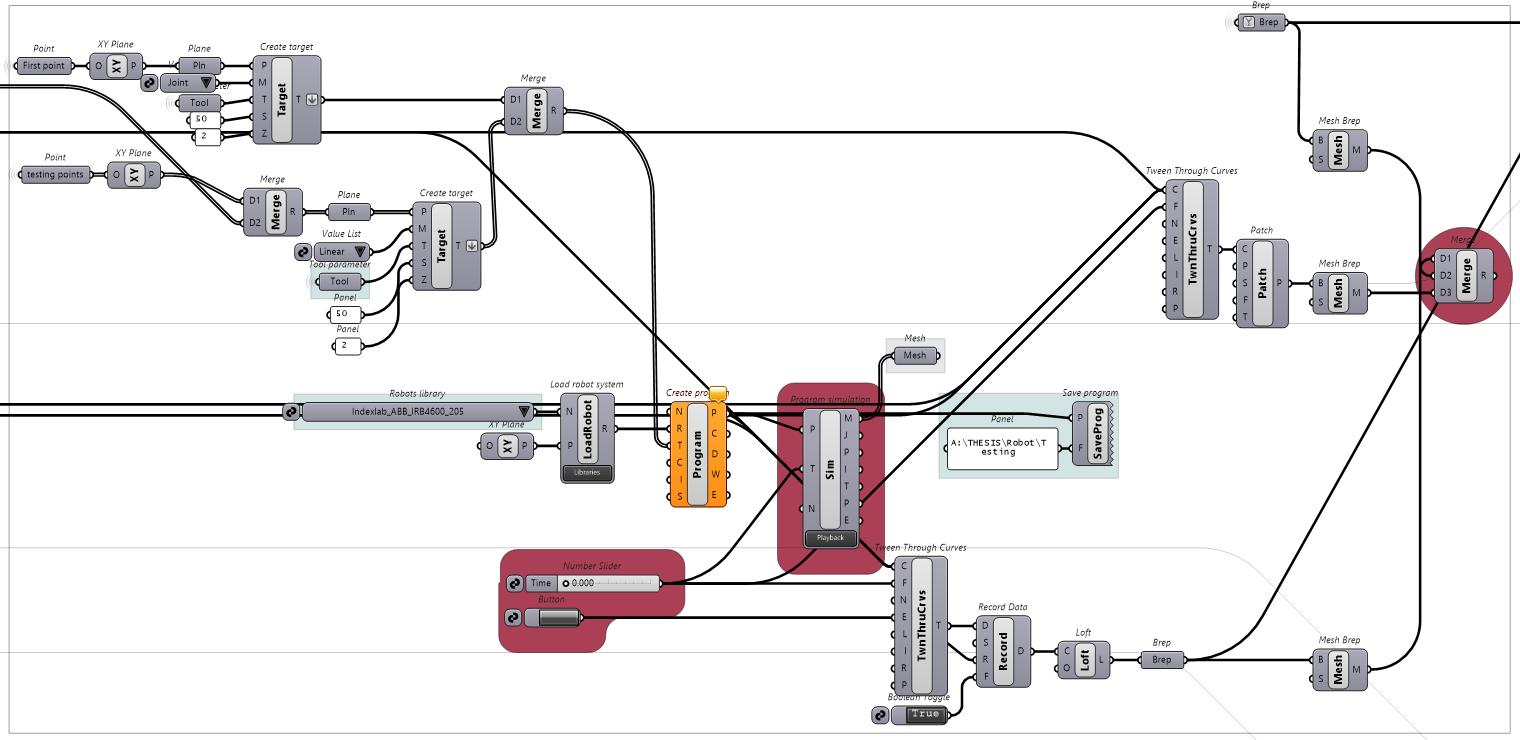
Tool Path Creation
Calibrating the End Effector
Program Simulation
Vision for the Future
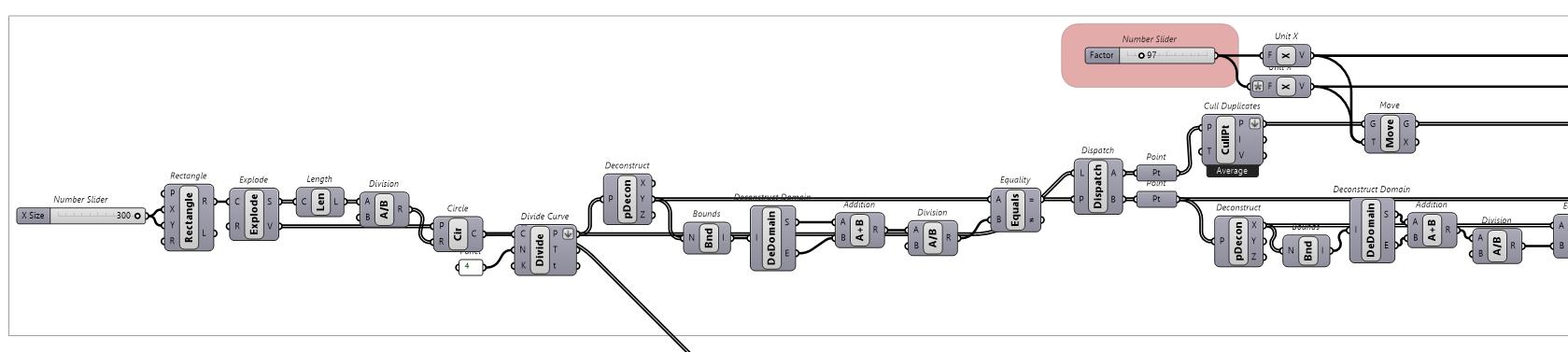
Pattern variations
Parametric Pattern Algorithm
- 02 -
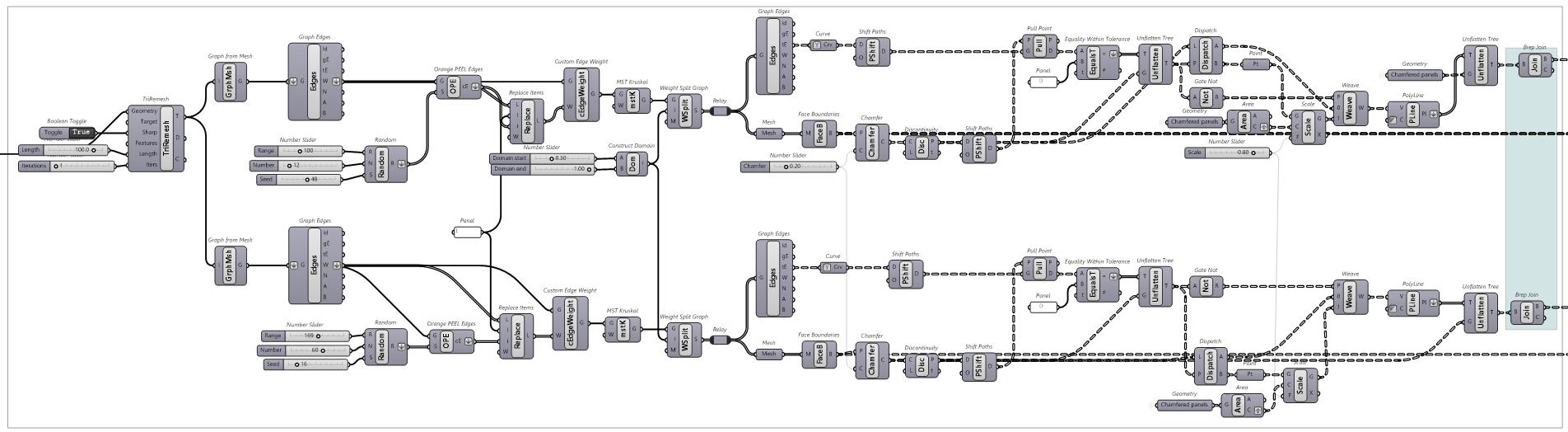
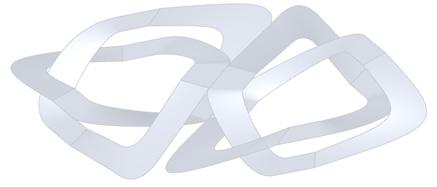
Graph-Based Mesh Panelization
CNC Cut - Augmented Reality
Final Project - IndexLab
Supervisor: Pierpaolo Ruttico
Software: Rhino - Grasshopper
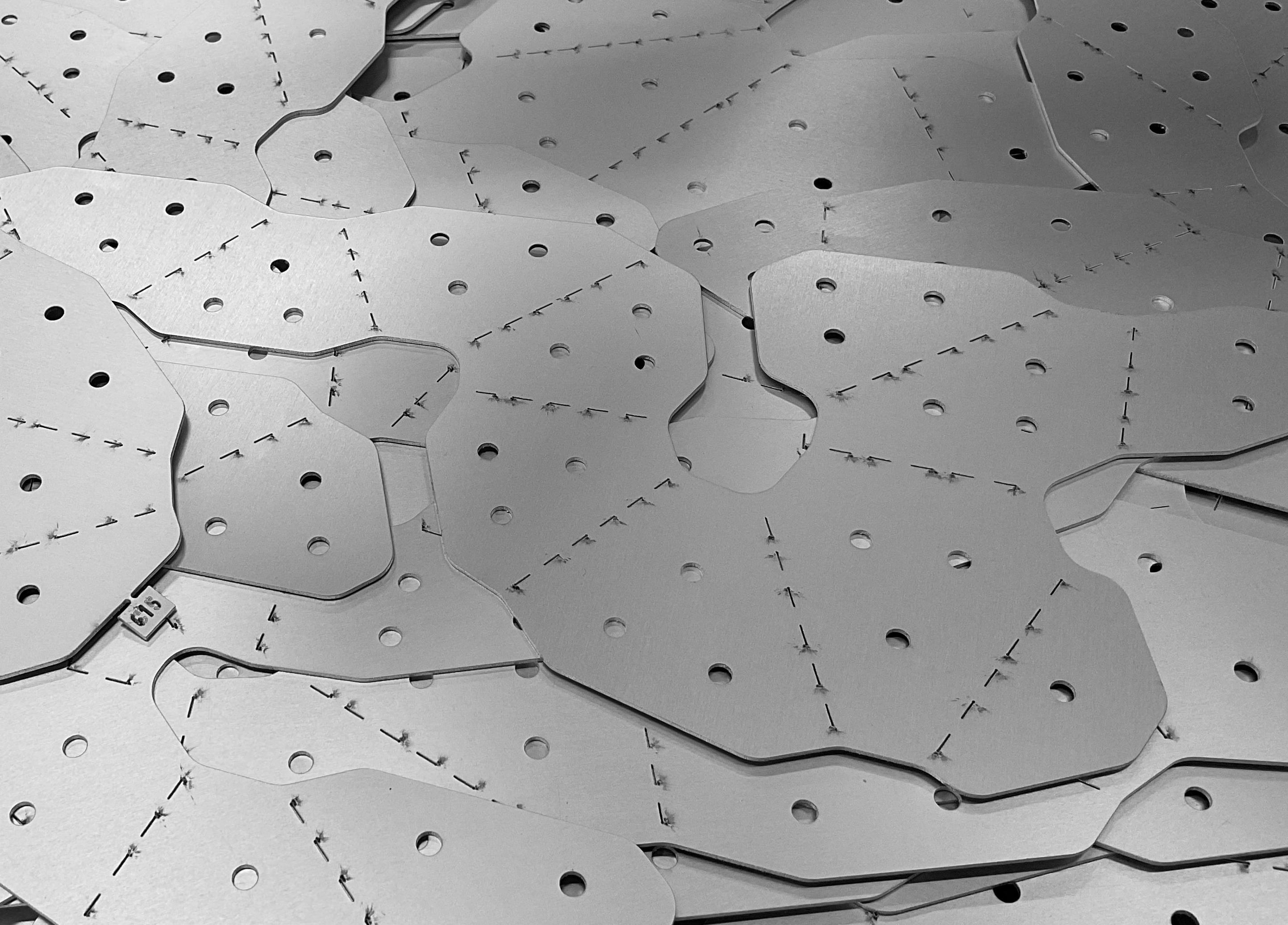
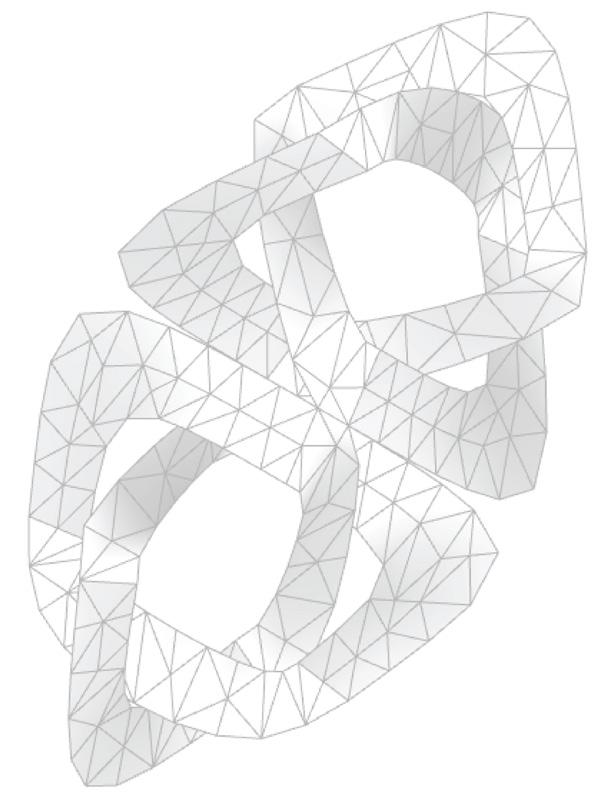
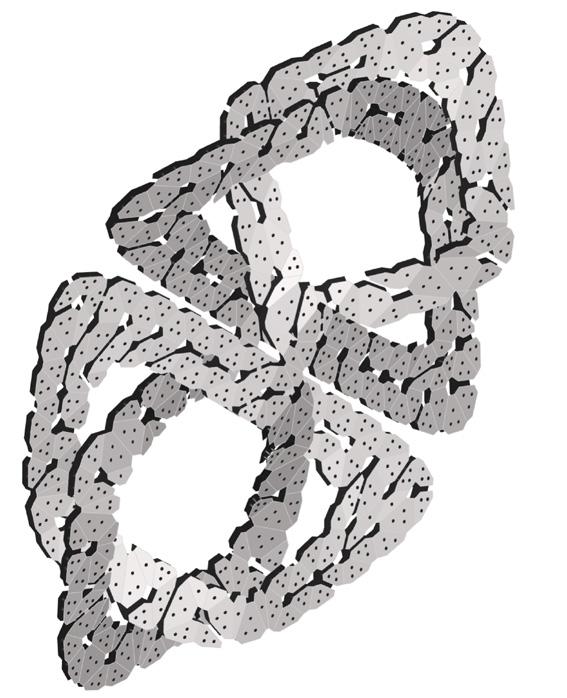
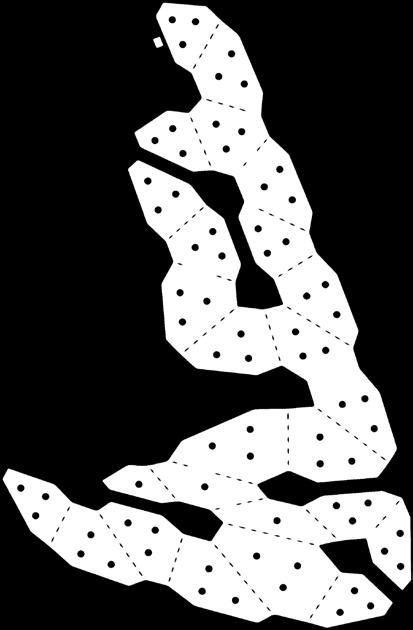
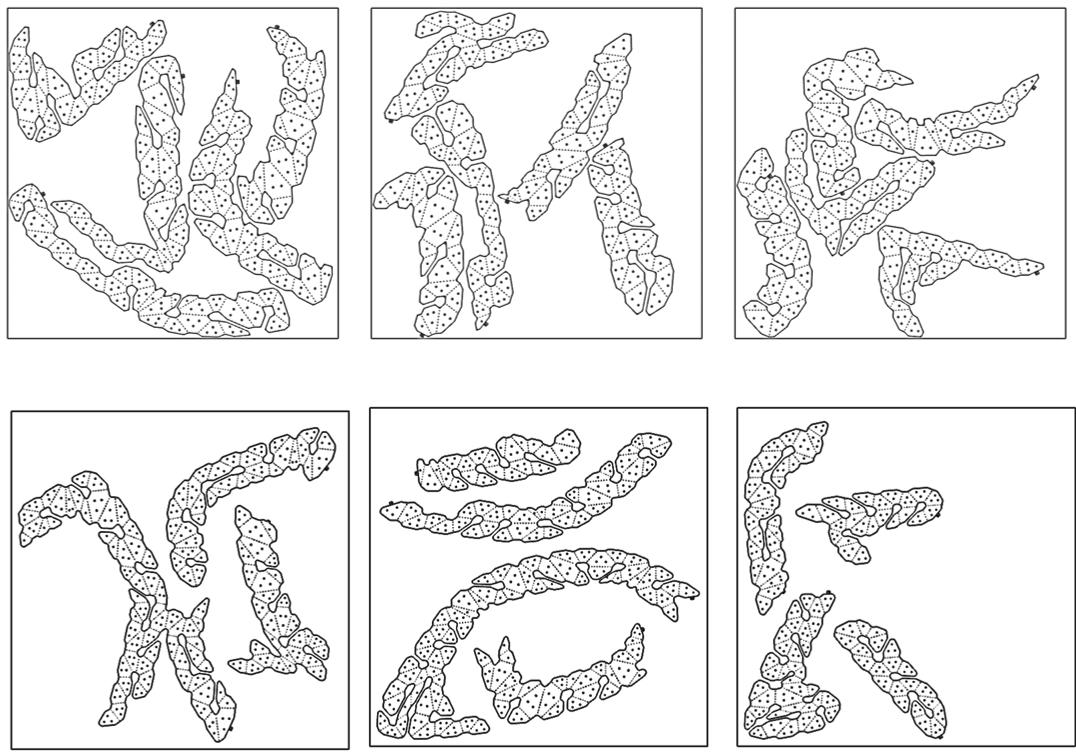
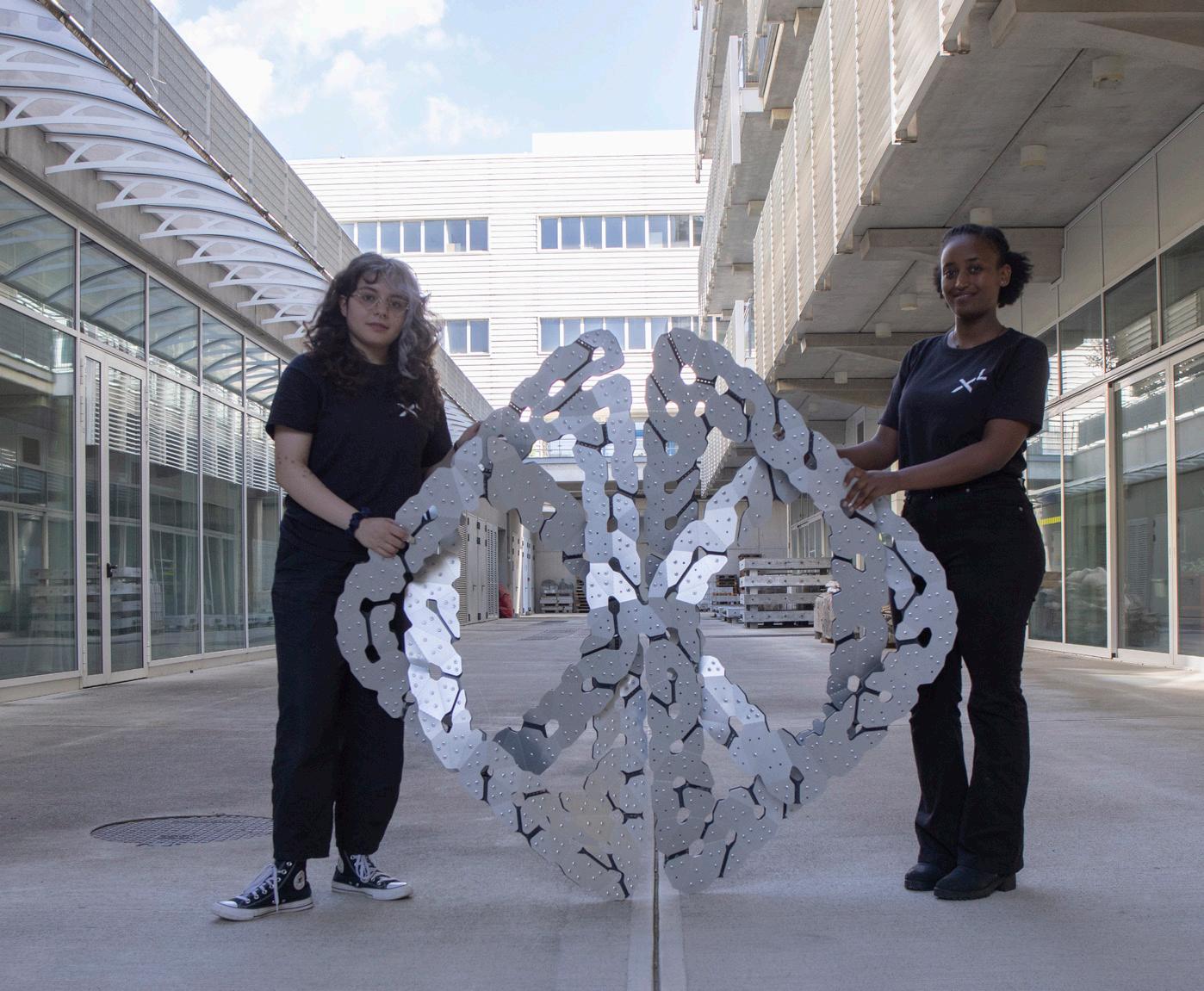
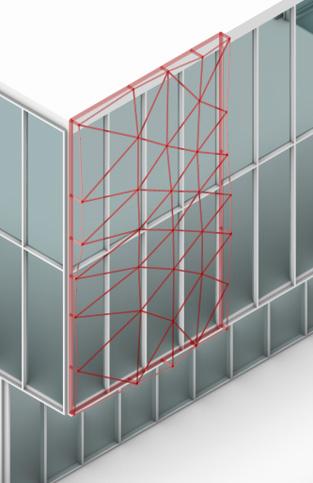
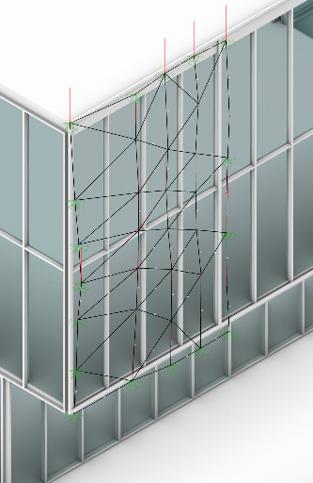
This project explores advanced fabrication methods for complex shading elements on building facades, integrating algorithmic programming, robotics, and augmented reality (AR). By developing a digital workflow that unifies design, fabrication, and performance analysis, the research demonstrates how robotic fabrication and AR can enhance precision, efficiency, and sustainability.
Through a case study, the project shows that these technologies streamline the design-to-fabrication process and improve the adaptability and performance of architectural facades, laying the groundwork for future innovation in complex architectural systems.
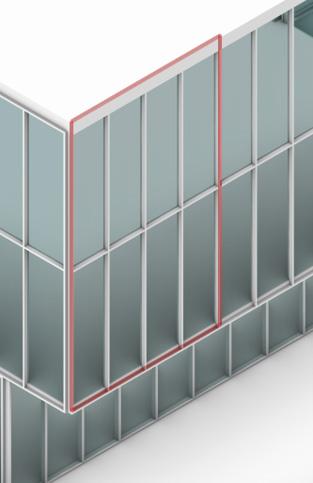
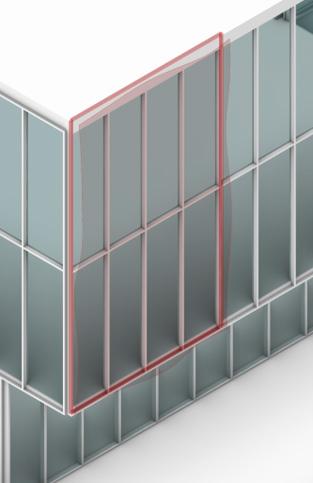
1. Base Surface
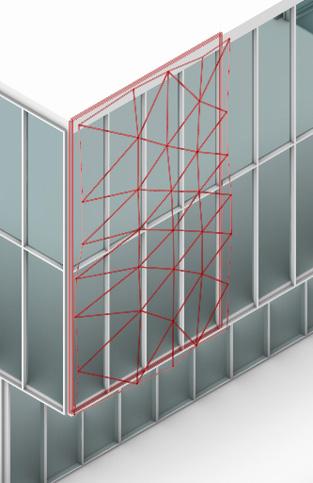
Rationalization
Offsetting
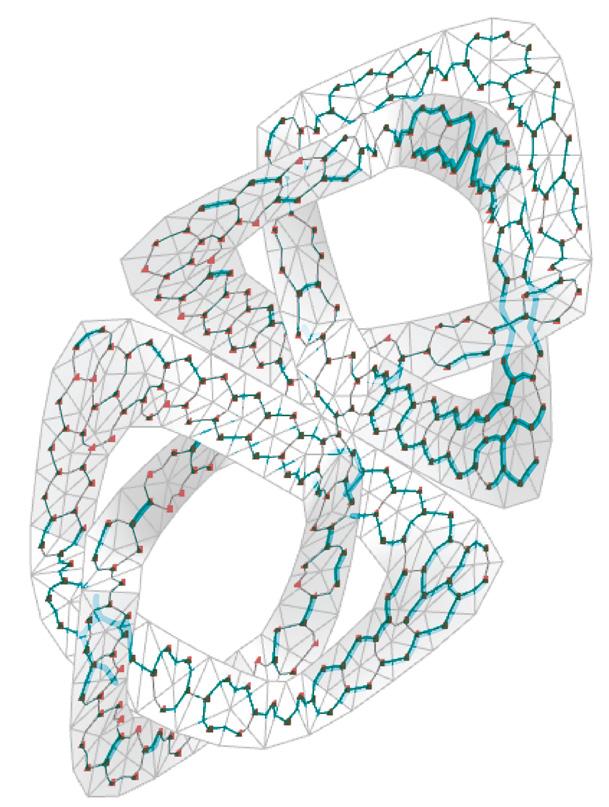
Clustering
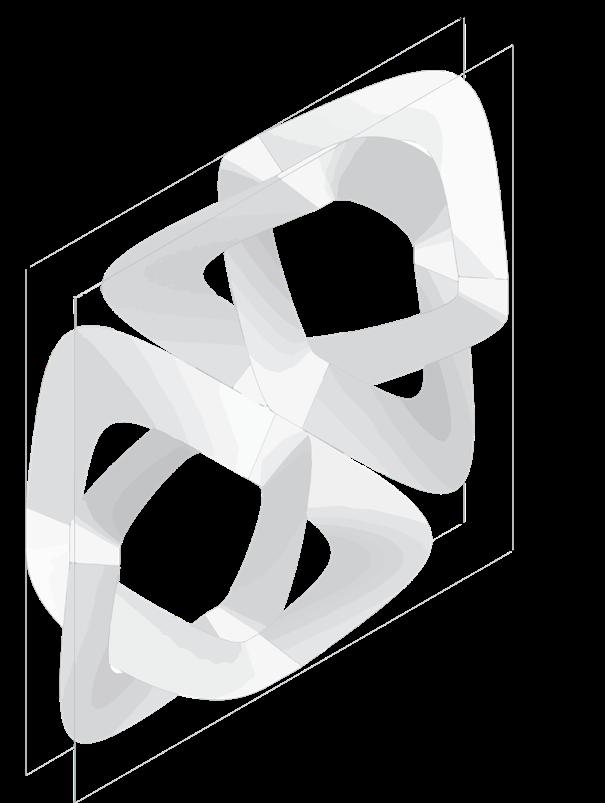
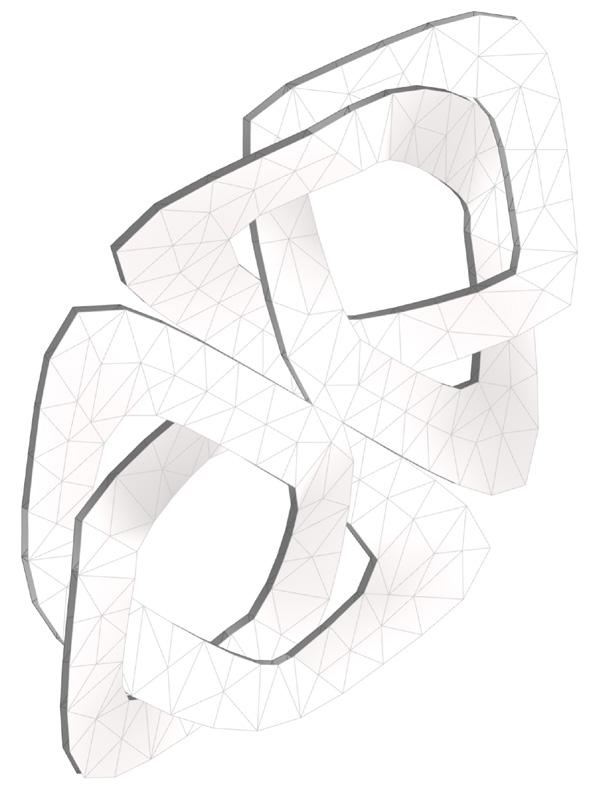
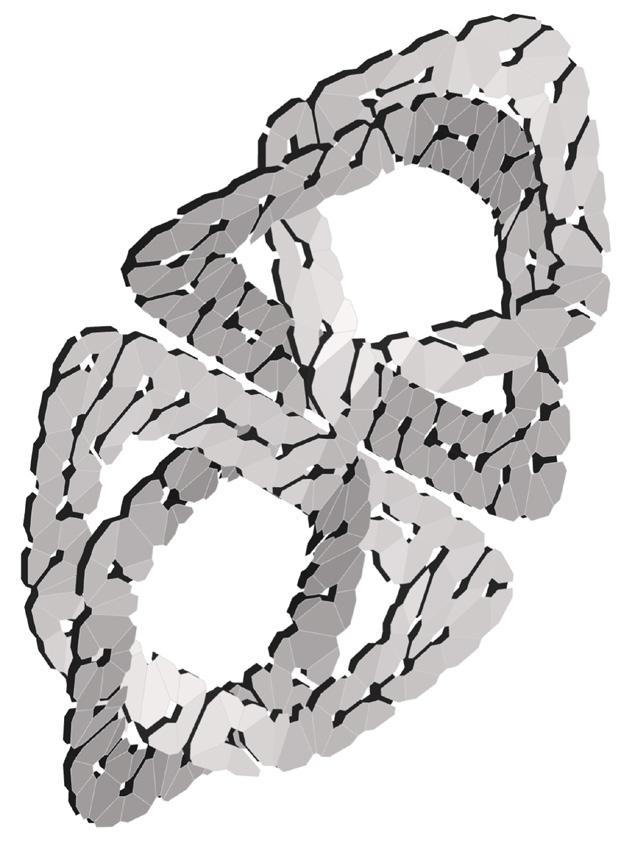
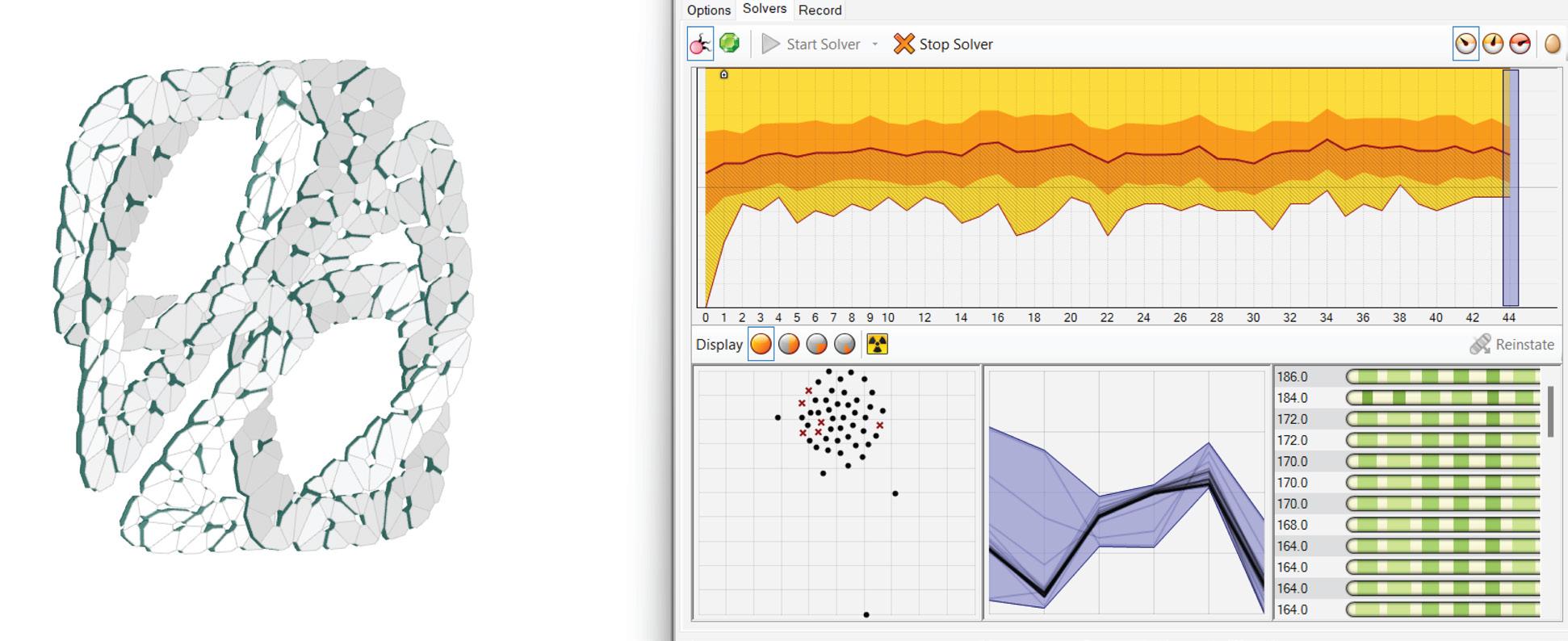
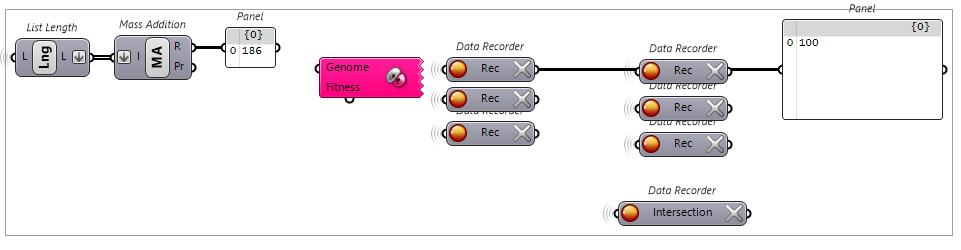
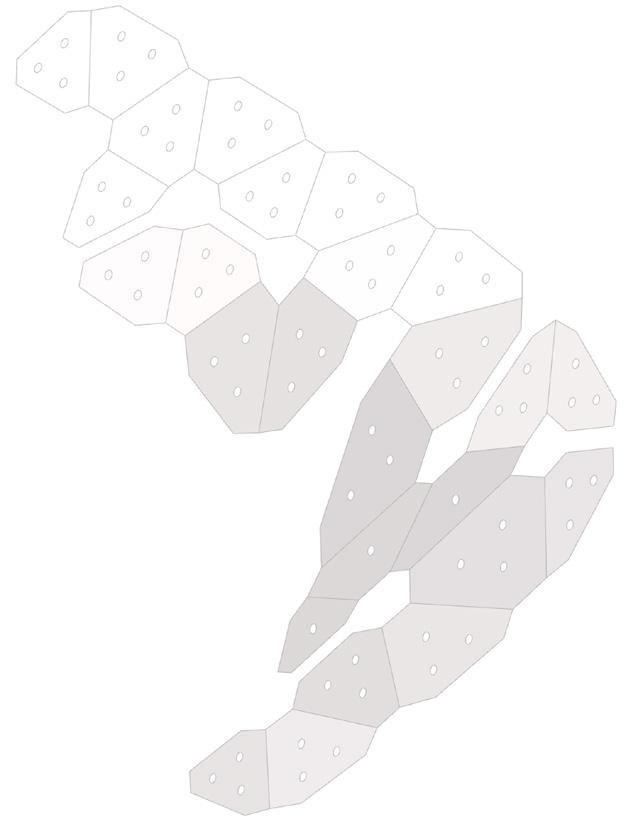
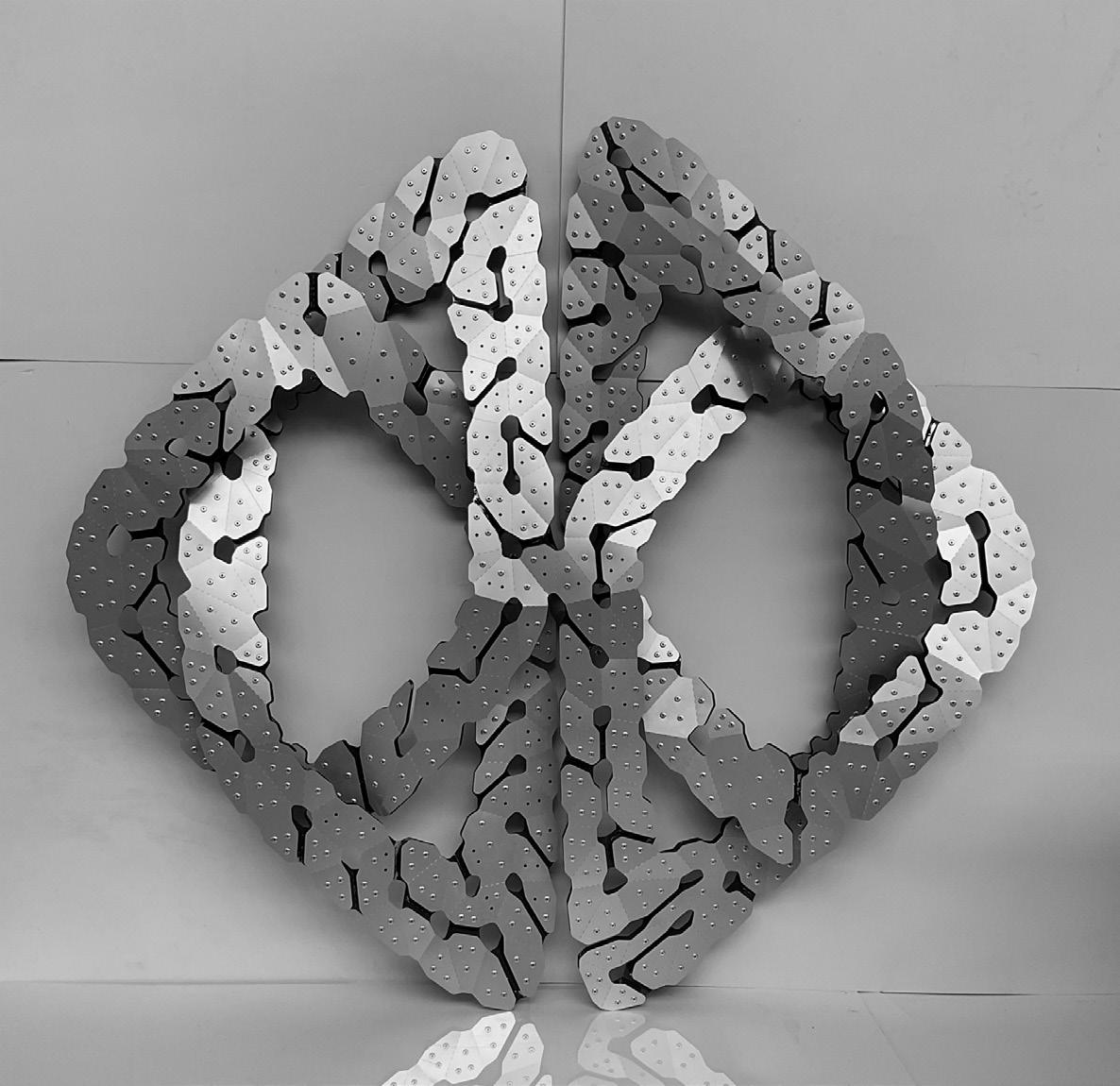
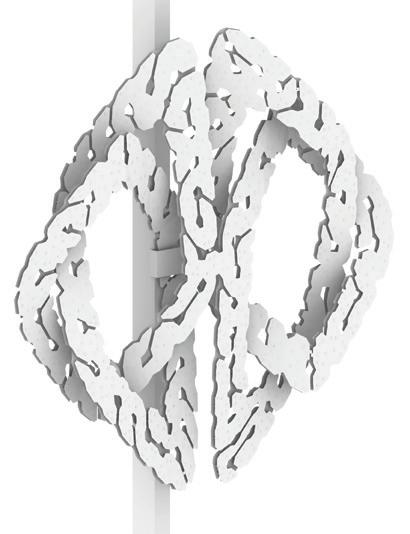
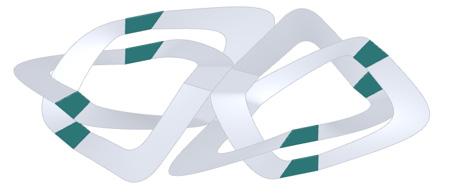
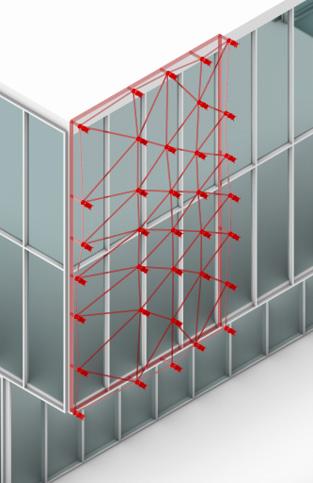
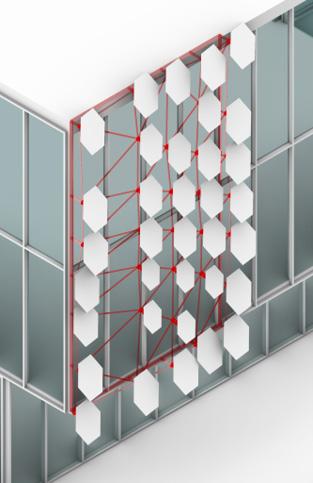
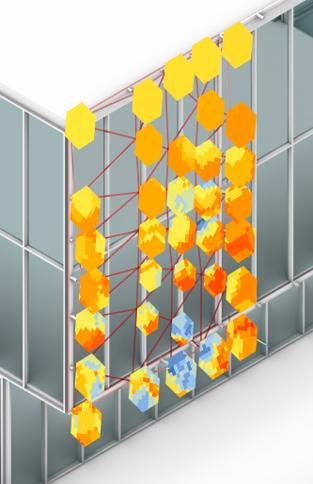
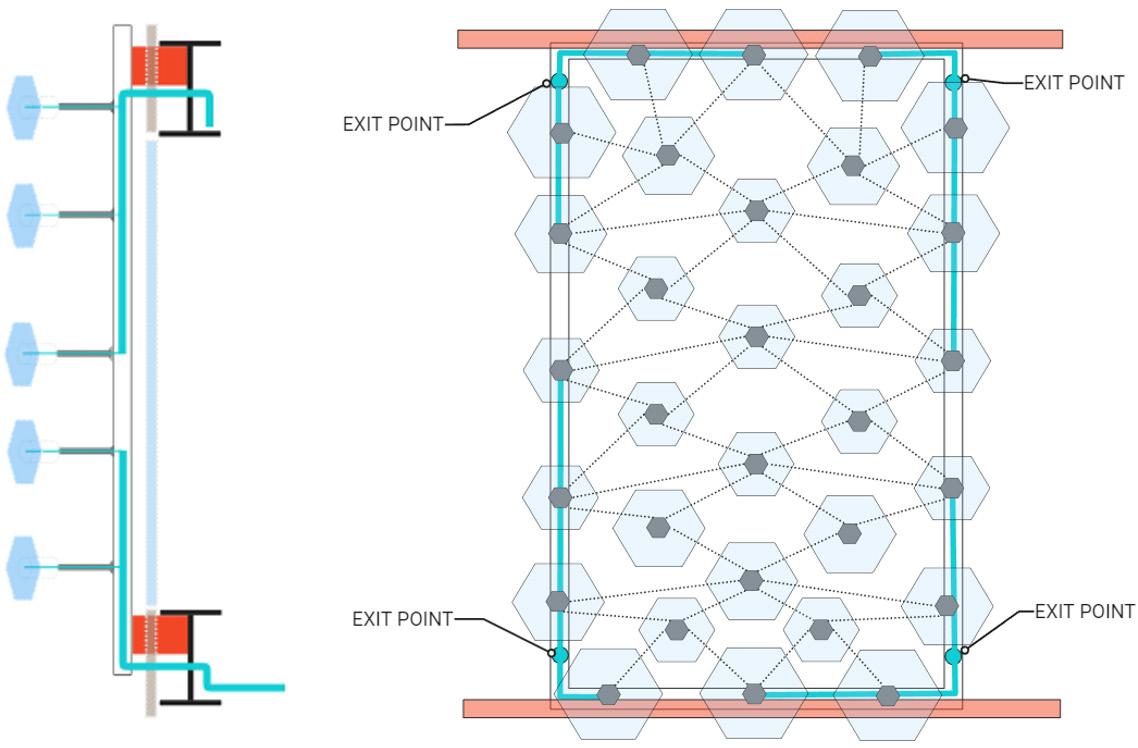
5. Panelization 6. Optimization to Find Maximized Stiffness and Overlap Between the Two Layers
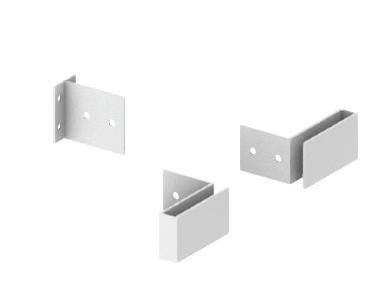
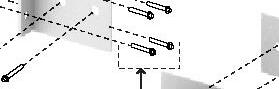
Connections
1.Folding Lines of the panels
2.Rivet connection Between Layers
3.Final connected module
1.Base Panel
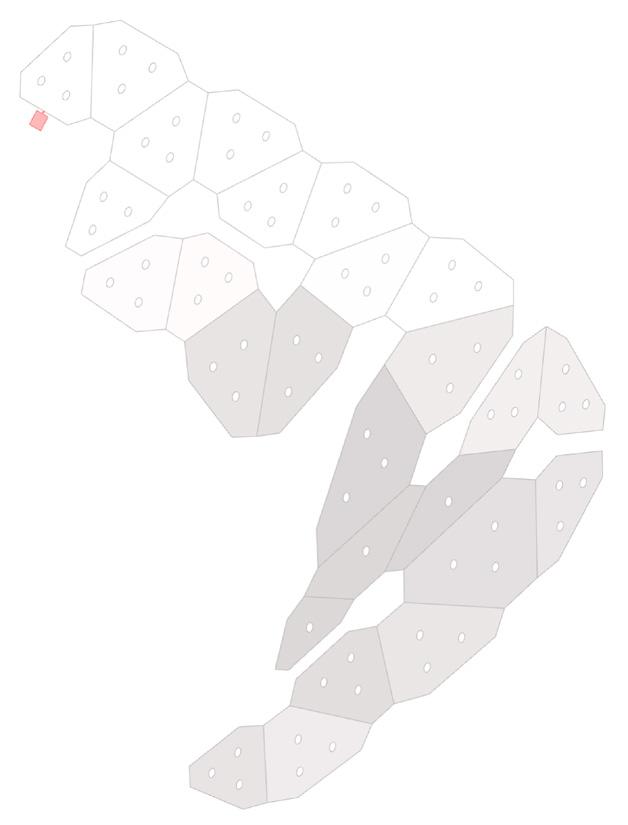
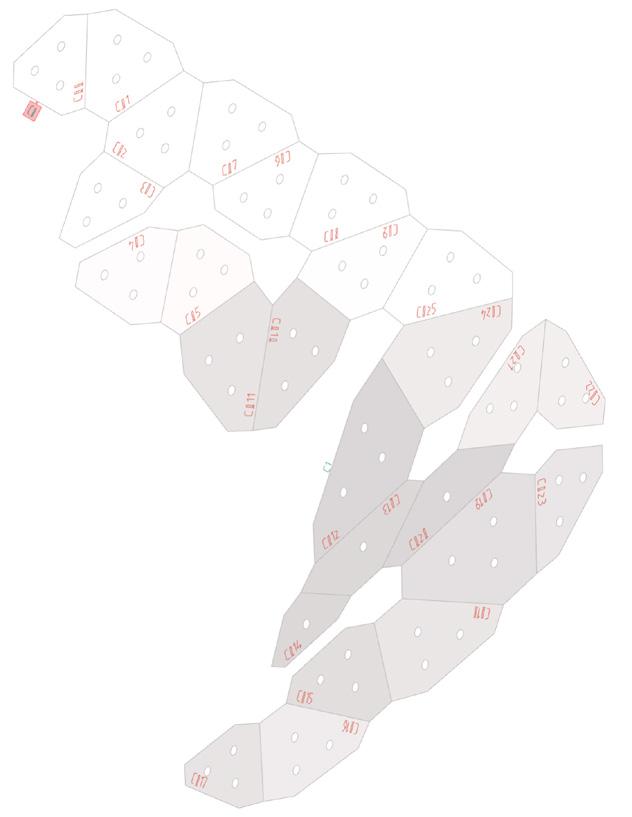
Labelling
2.Panel Labelling
3.Surface Labelling
4.Angle Labelling
1.Outline of the Panel
Documentation
Holes
Documentation
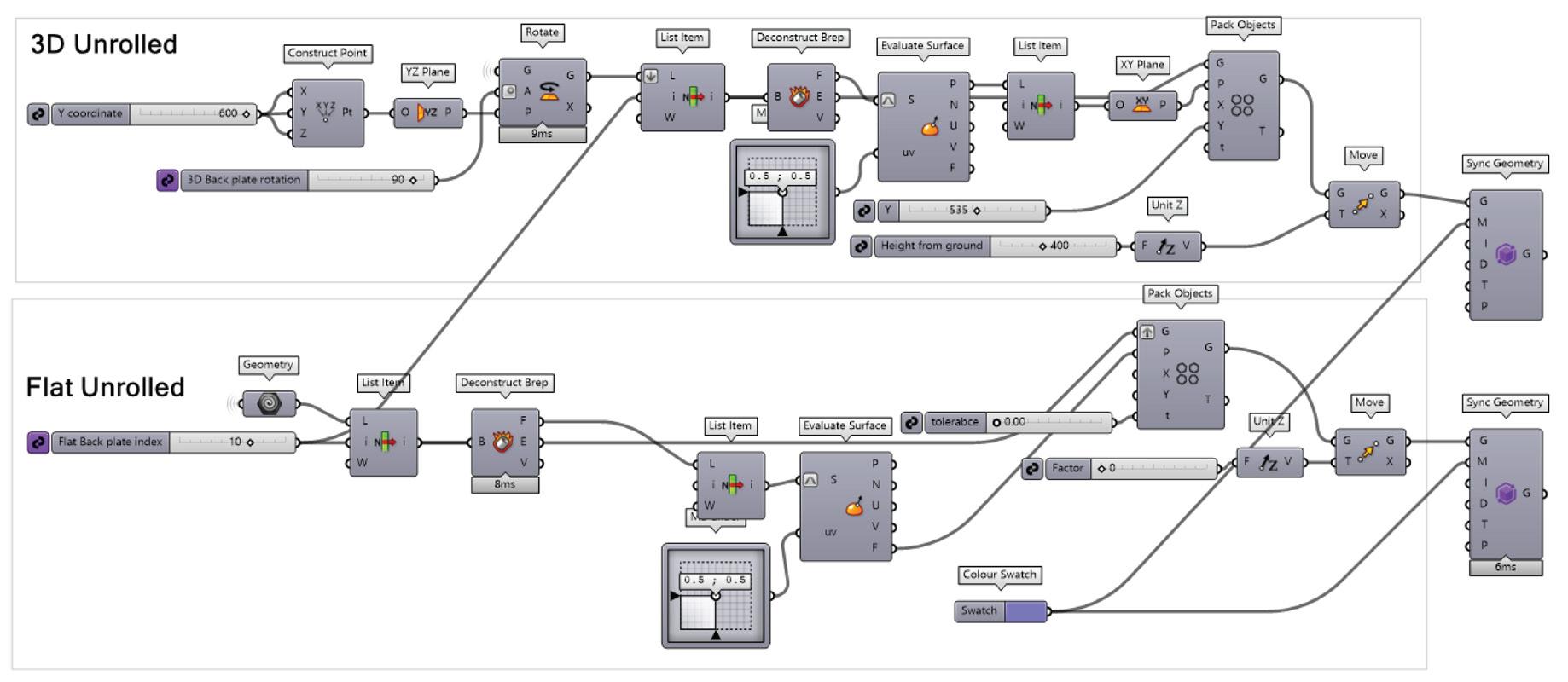
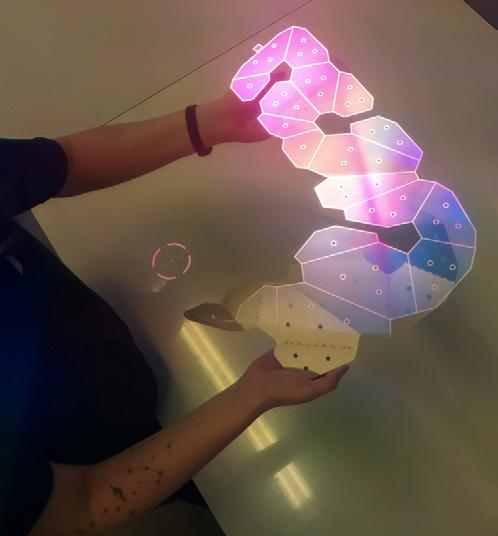
Setting Up Augmented Reality Using Fologram
- 03 -
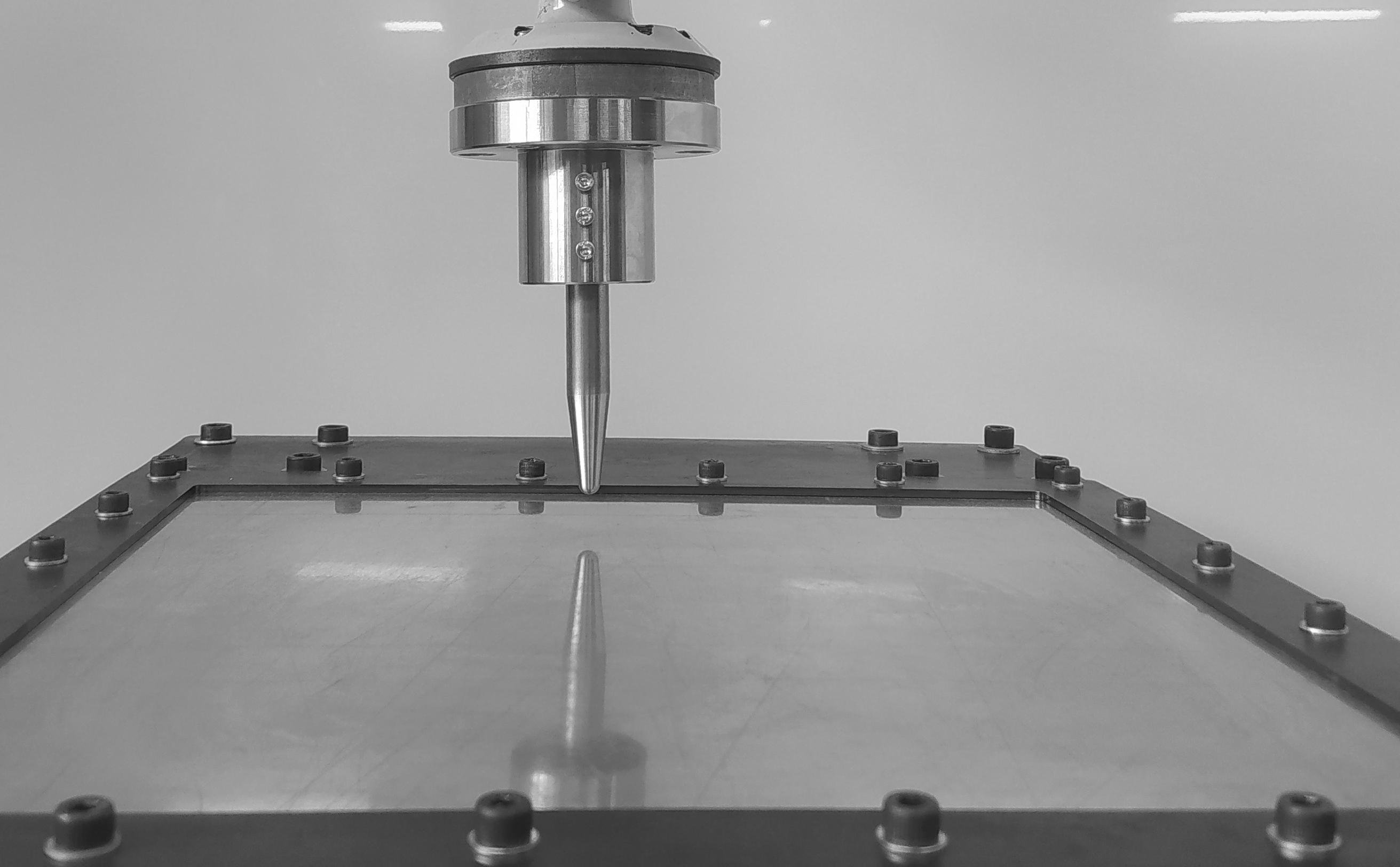
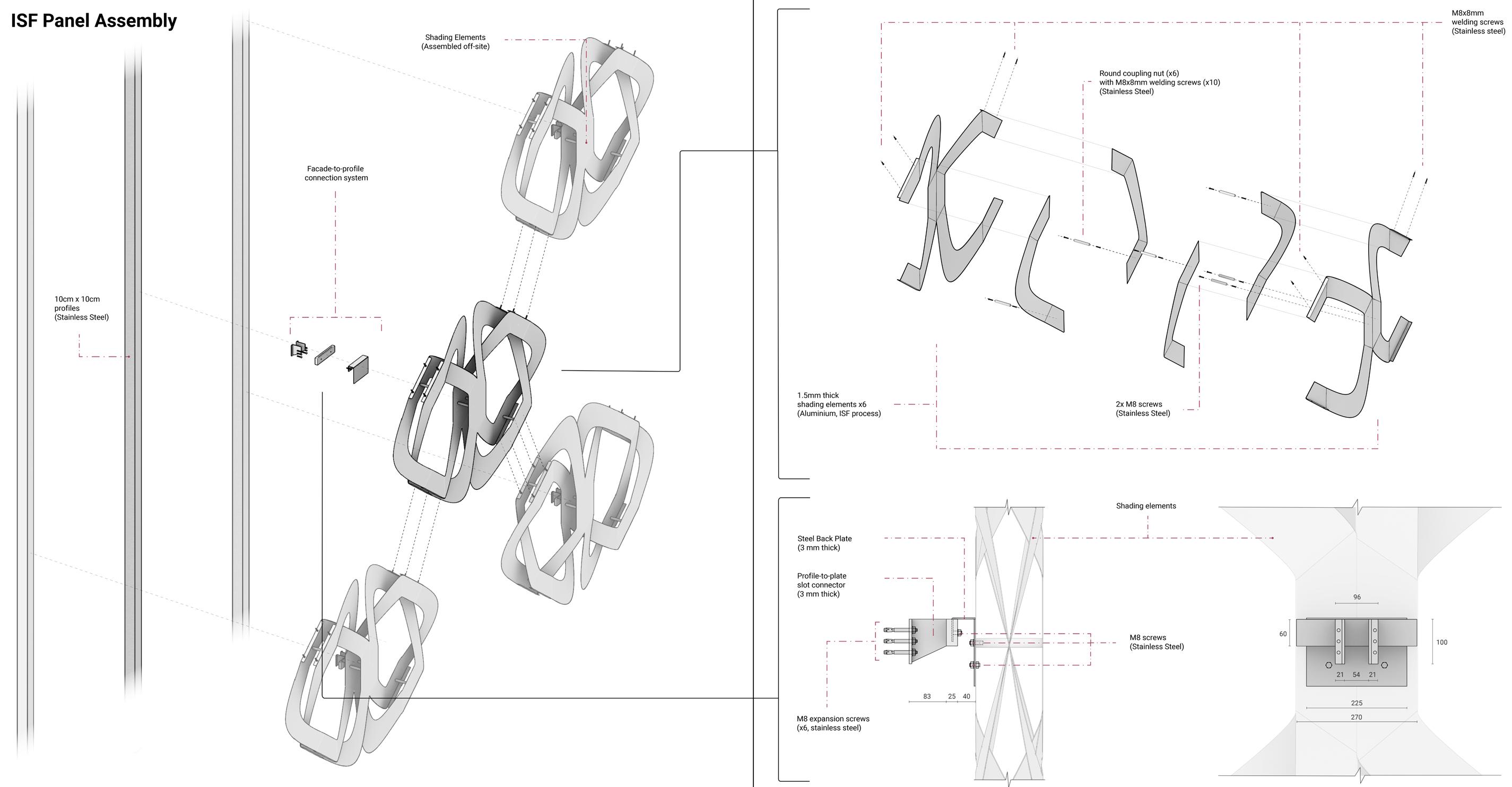
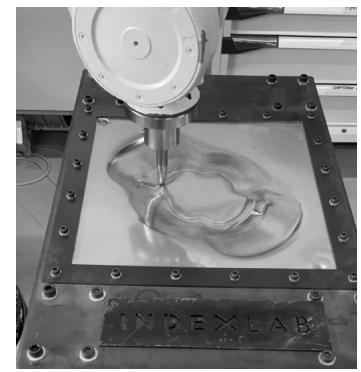
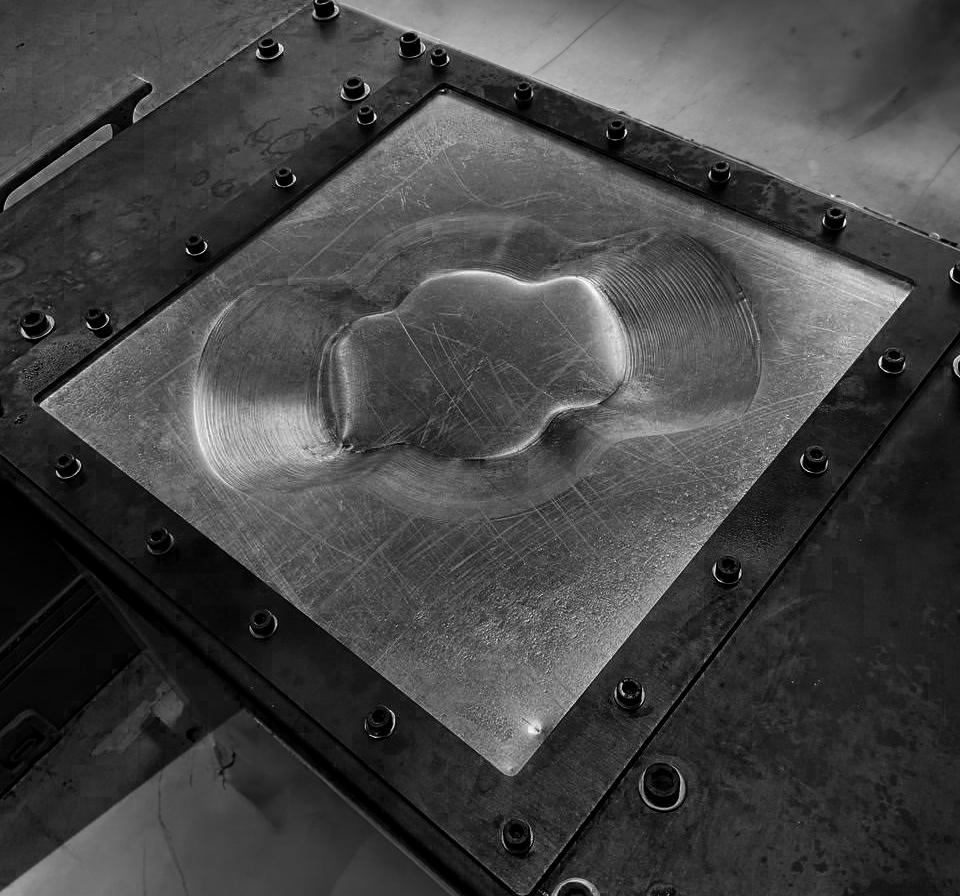
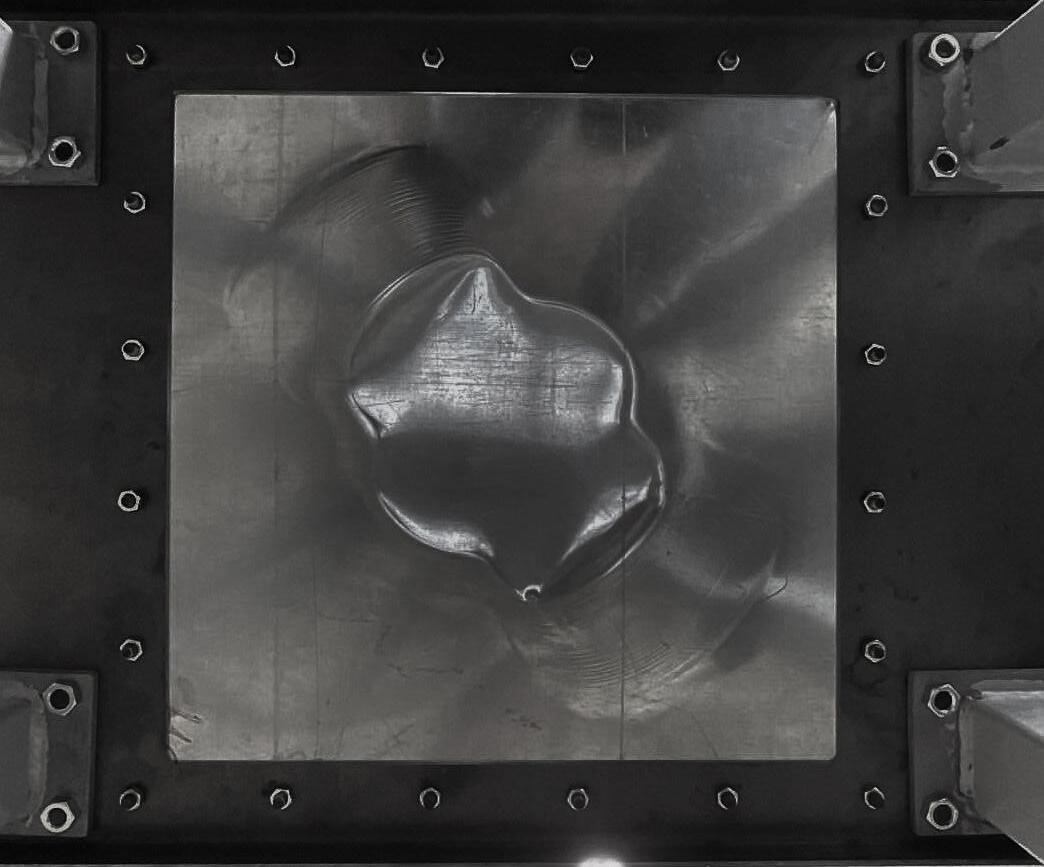
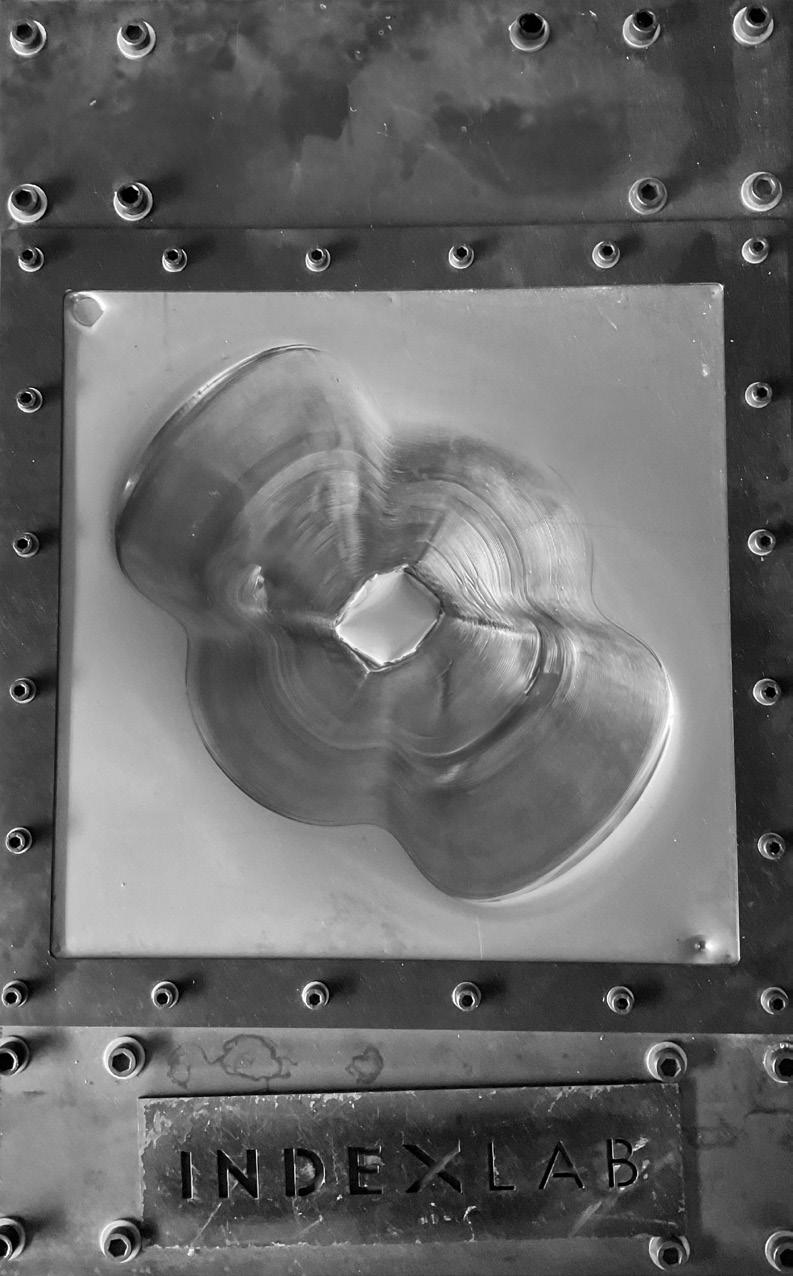
Incremental Sheet Forming
Robotic Fabrication
Final Project - IndexLab
Supervisor: Pierpaolo Ruttico
Software: Rhino - Grasshopper
This project explores advanced fabrication methods for complex shading elements on building facades, integrating algorithmic programming, robotics, and augmented reality (AR). By developing a digital workflow that unifies design, fabrication, and performance analysis, the research demonstrates how robotic fabrication and AR can enhance precision, efficiency, and sustainability.
Through a case study, the project shows that these technologies streamline the design-to-fabrication process and improve the adaptability and performance of architectural facades, laying the groundwork for future innovation in complex architectural systems.
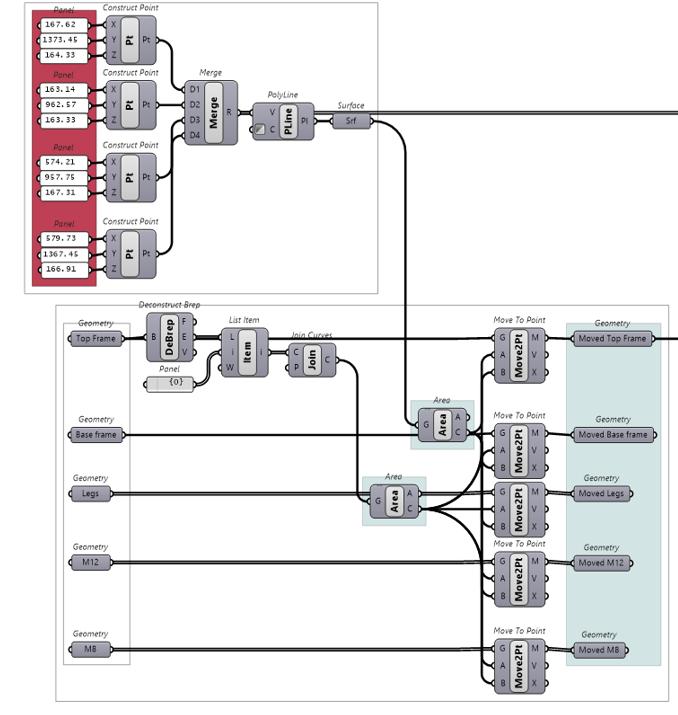
Tool Path Generation
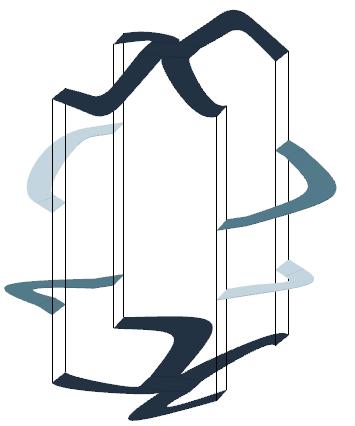
Initial Geometry
Incorporating Small Planar Surfaces
Identifying the Different Curvatures
Rationalization
Tweening through the boundary curves
Typology 1
Typology 2
Second Set of Toolpath
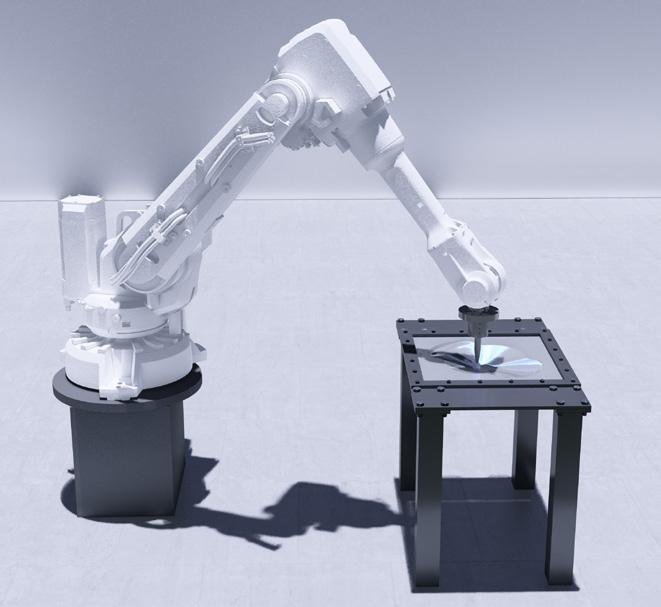
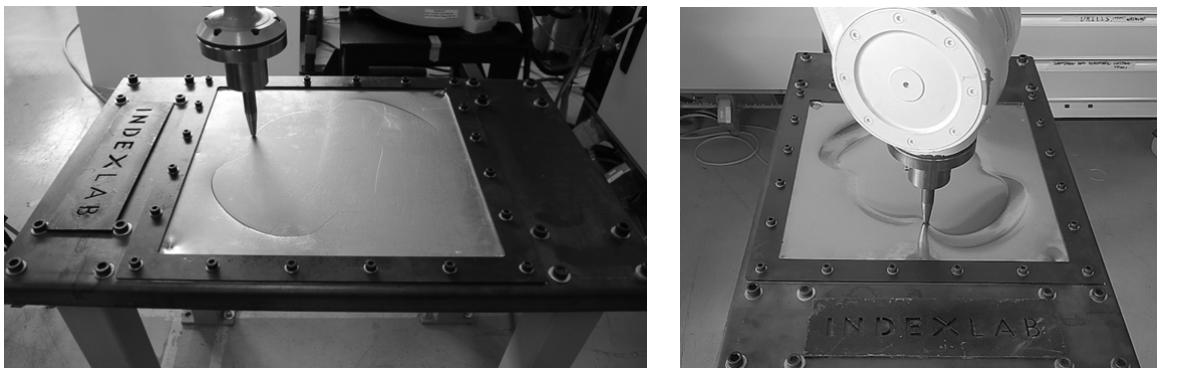
1. Starting Point
2. Incrementing Process
3.Final Point
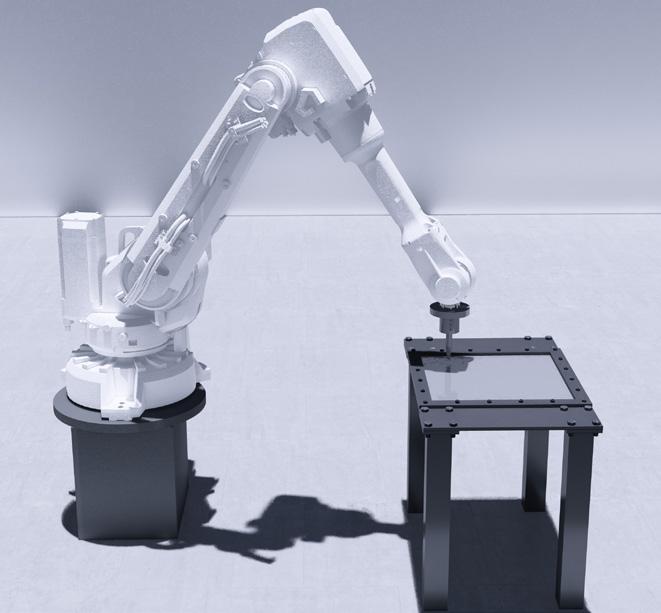
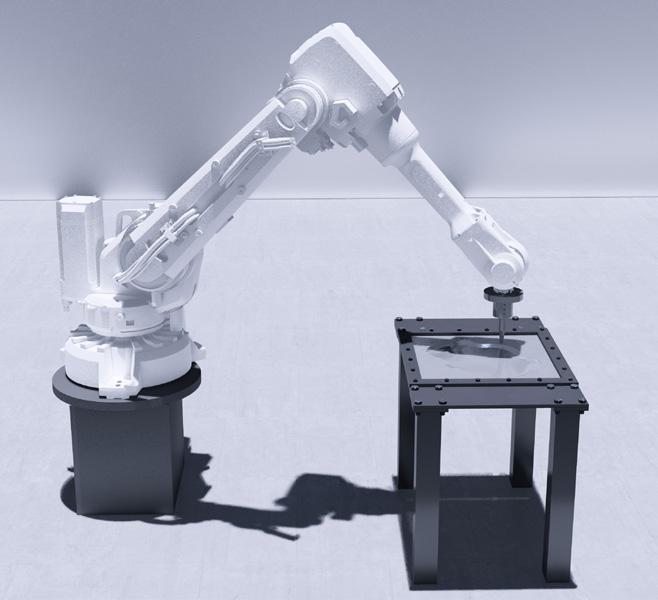
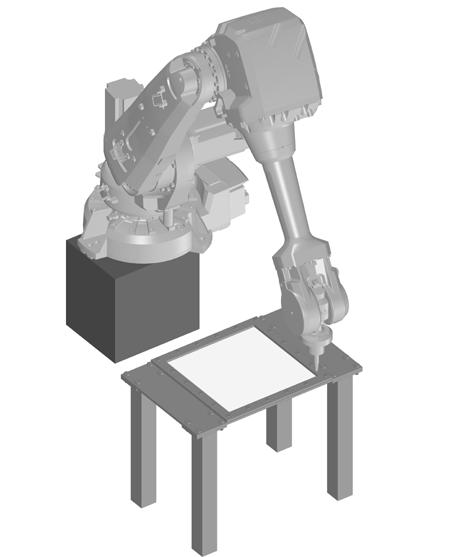
Process Simulation
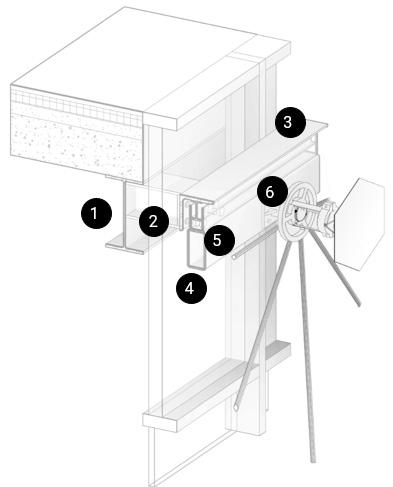
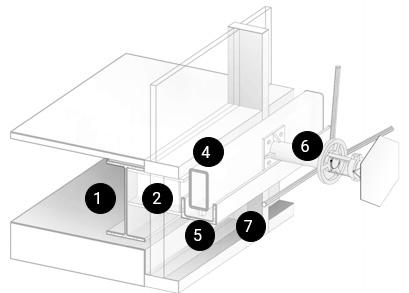
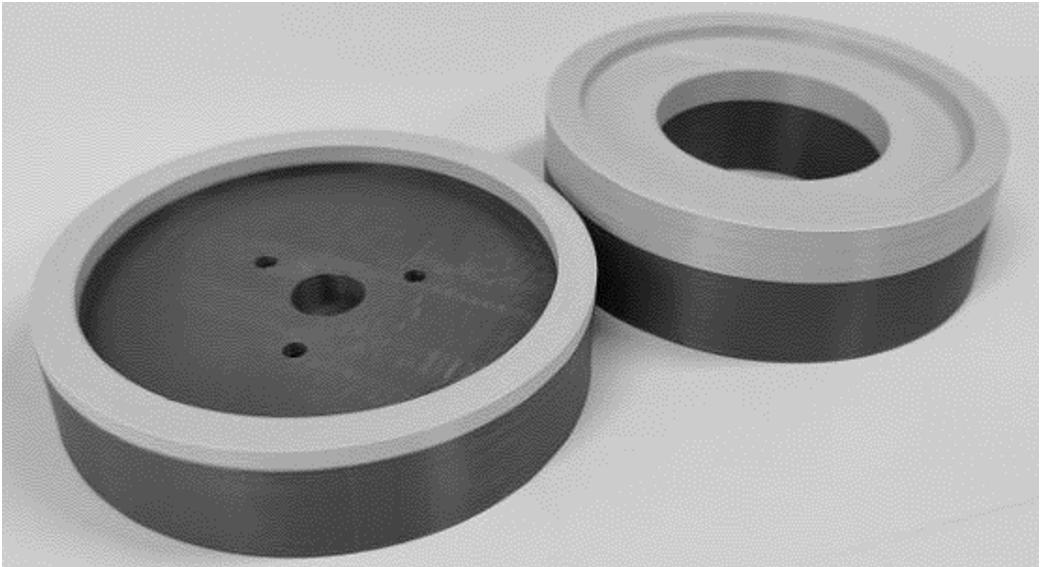
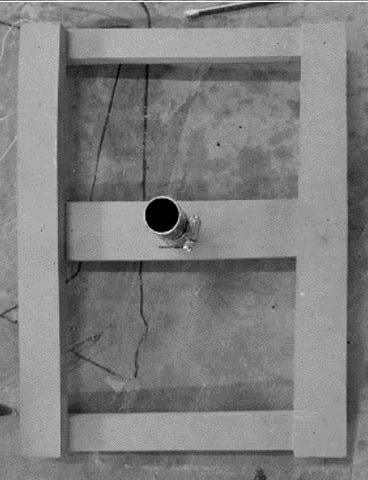
On-site Assembly
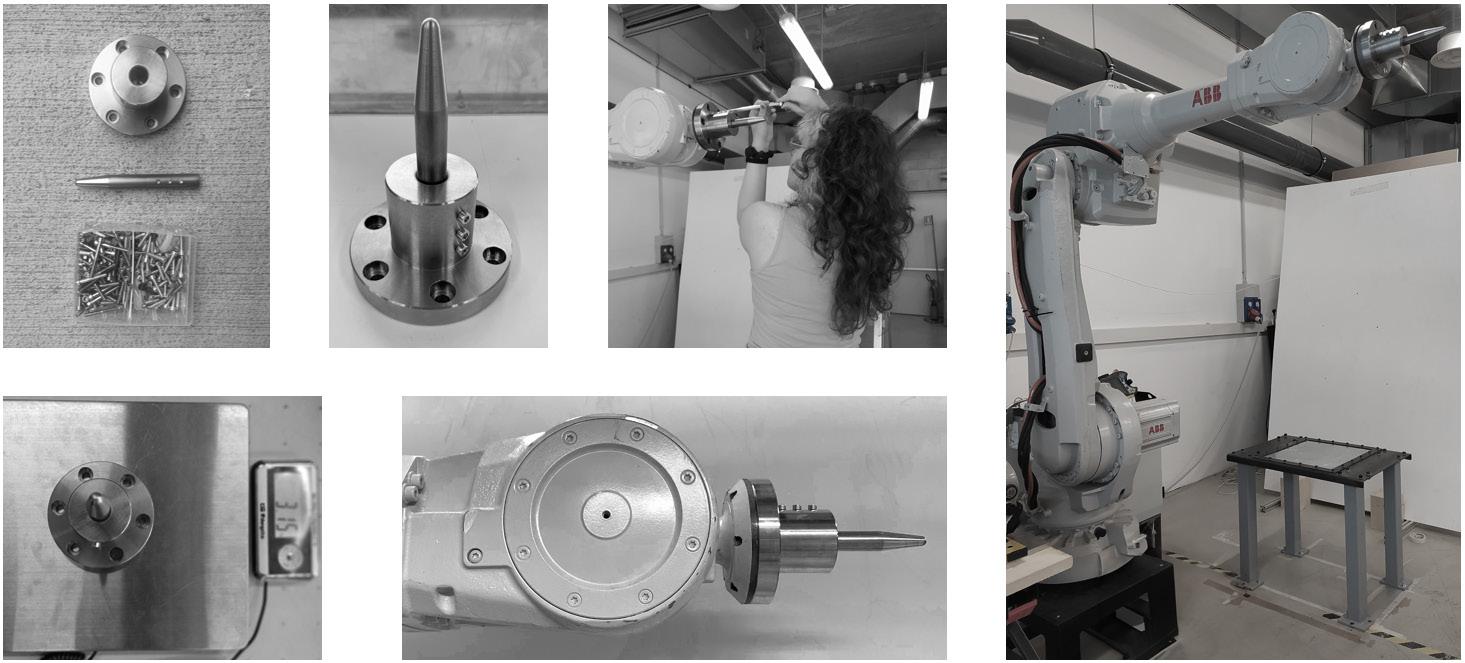
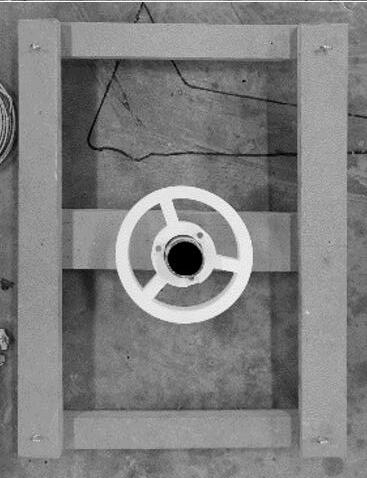
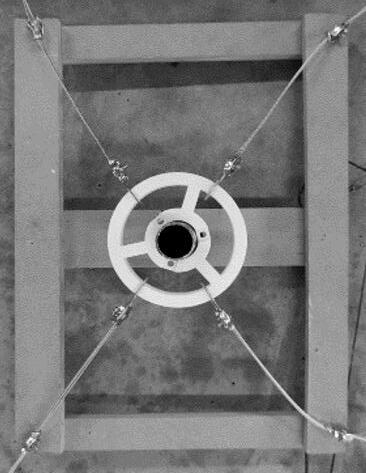
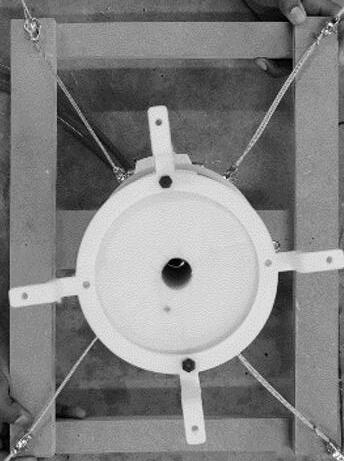
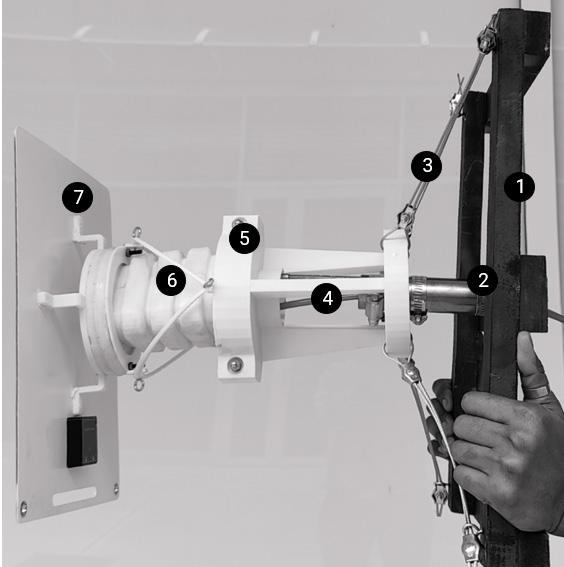
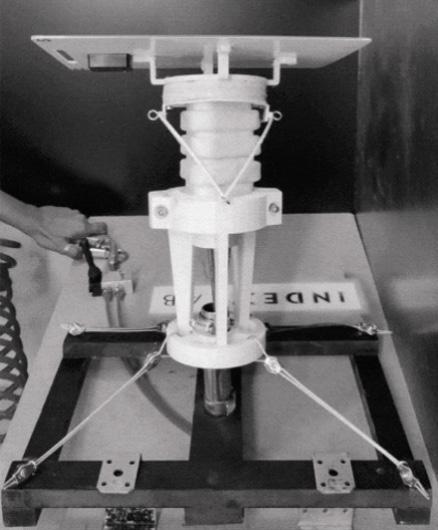
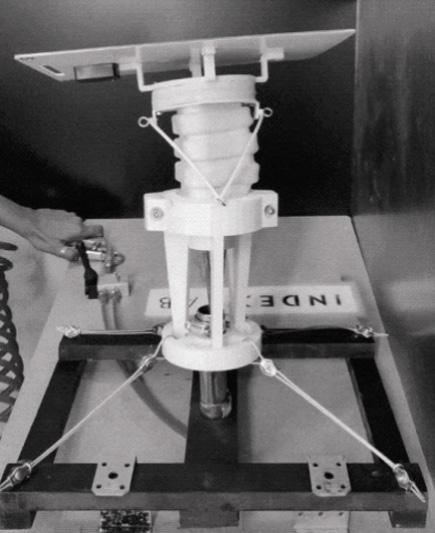
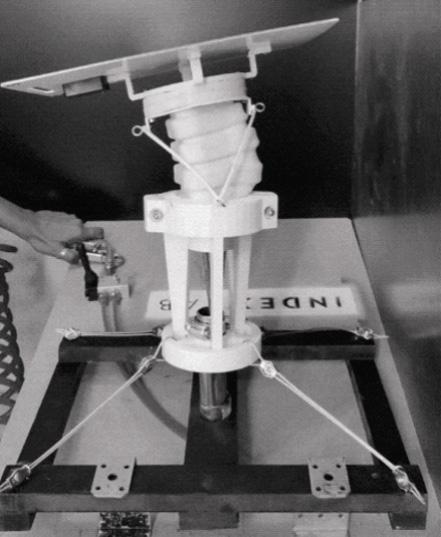
Fixture System Assembly
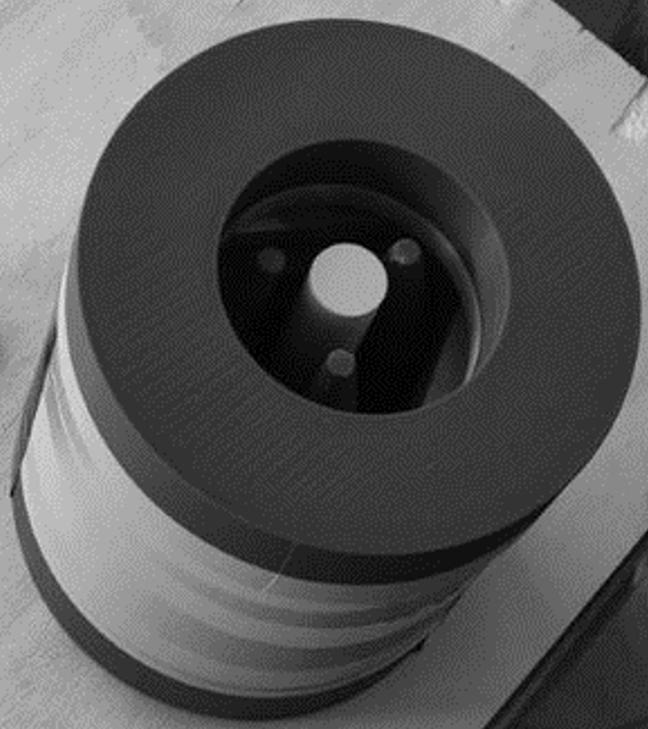
End Effector Assembly
Calibration Process
- 04 -
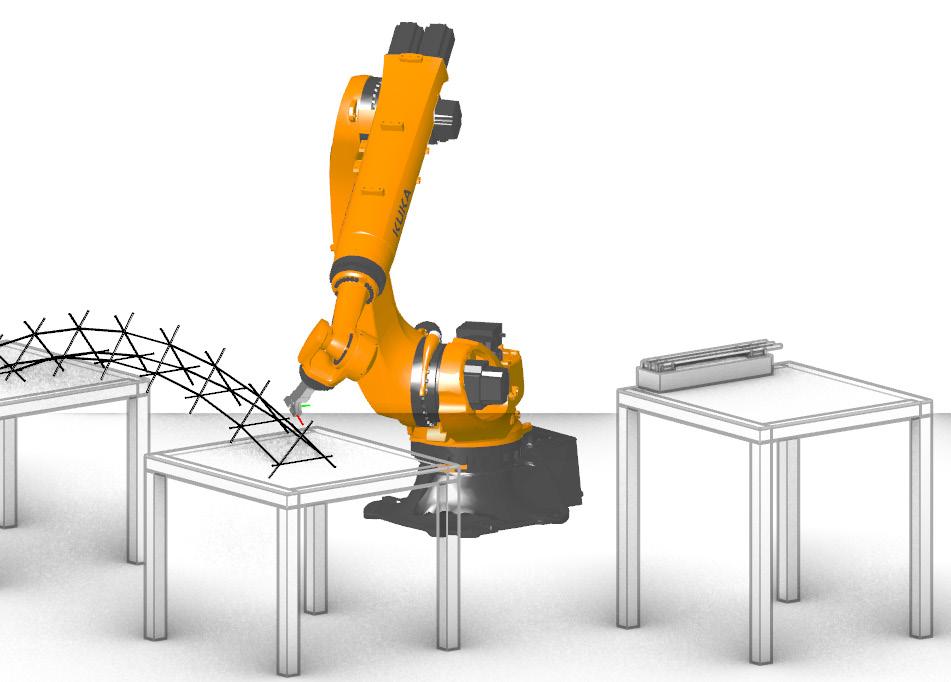
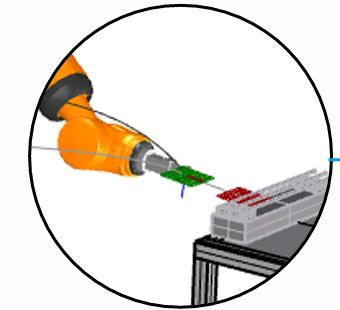
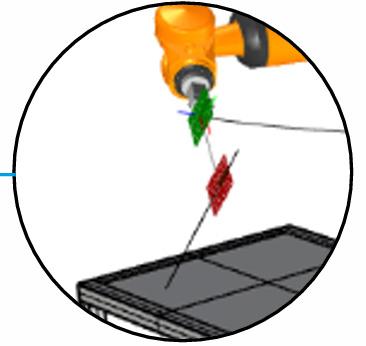
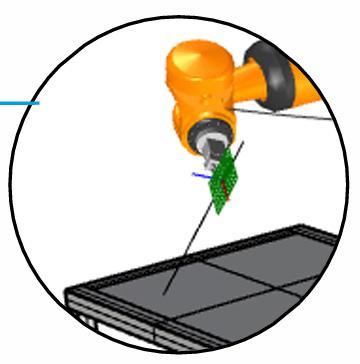
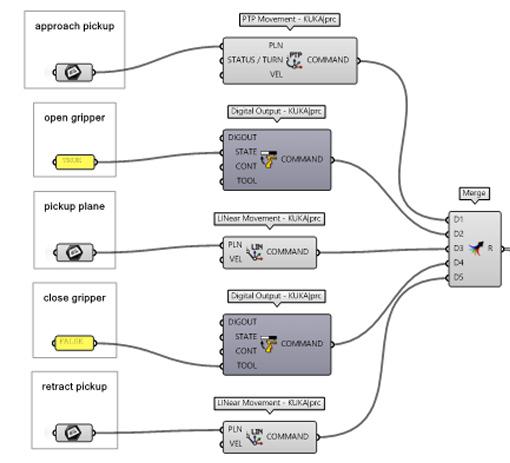
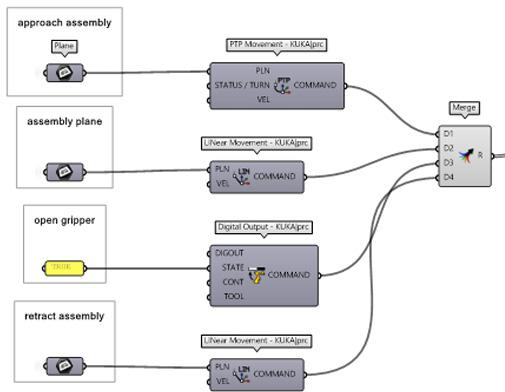
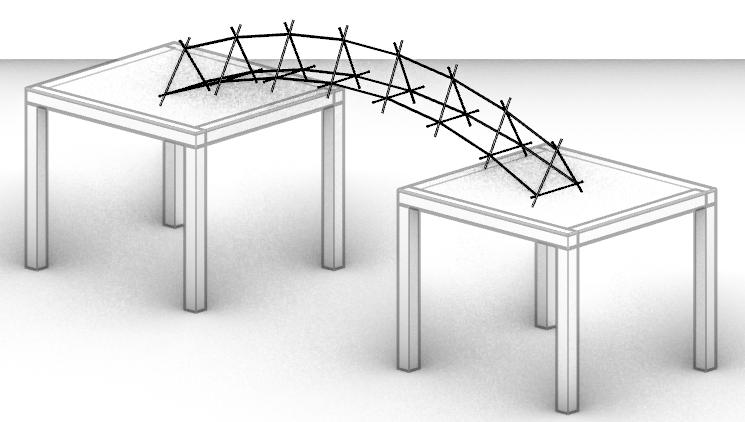
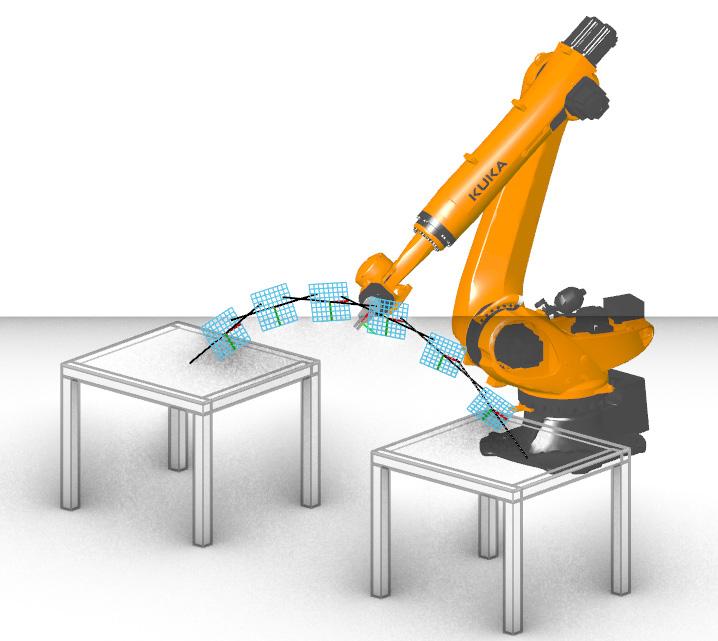
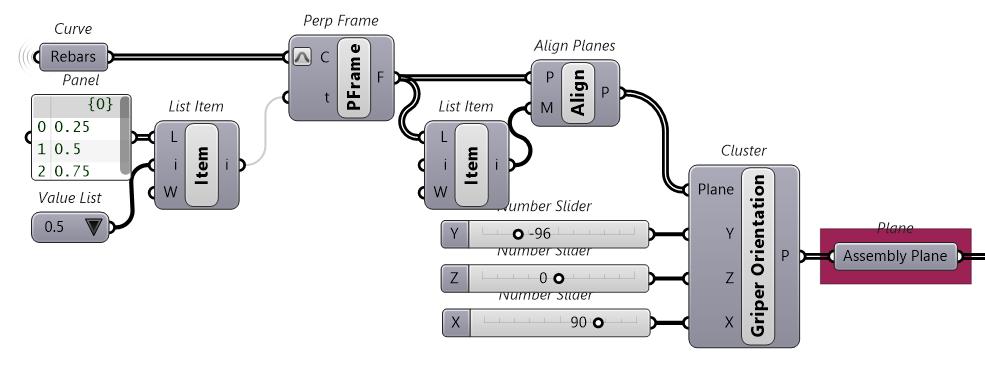
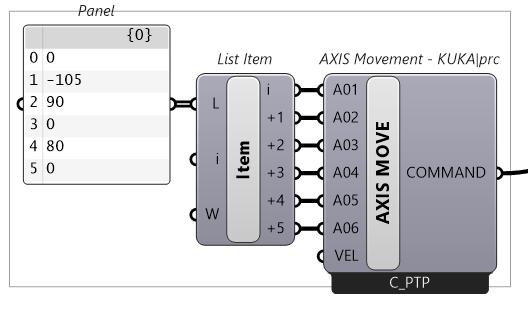
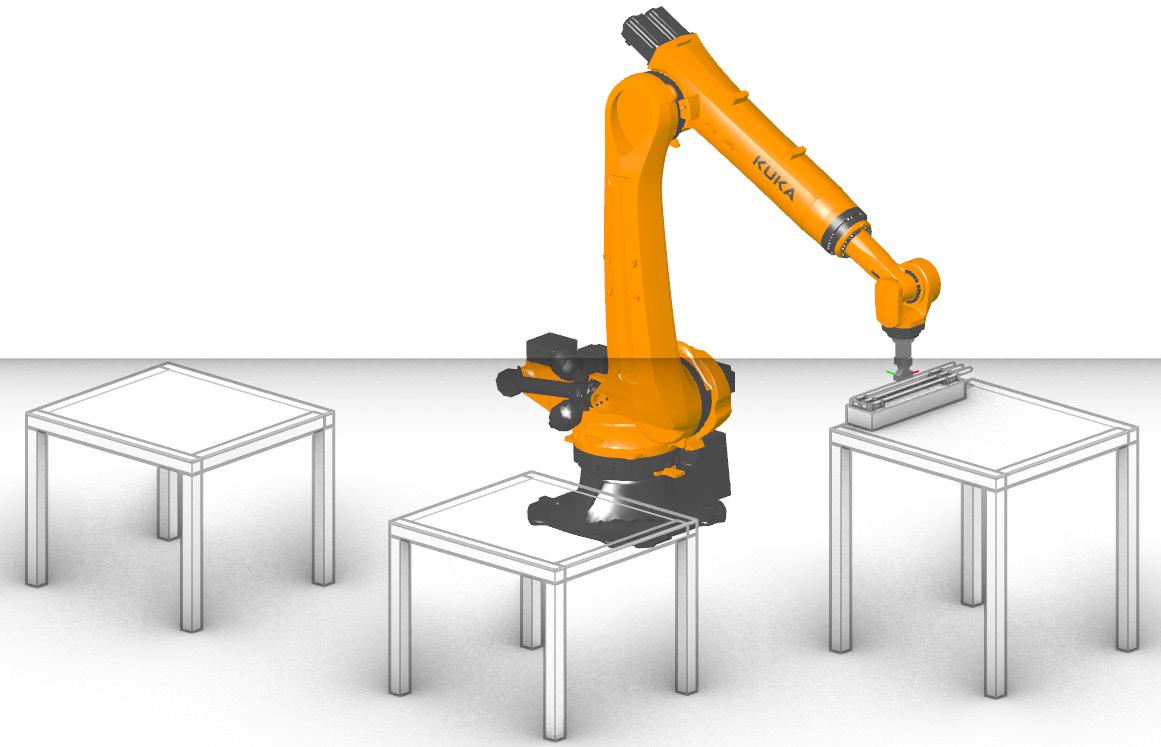
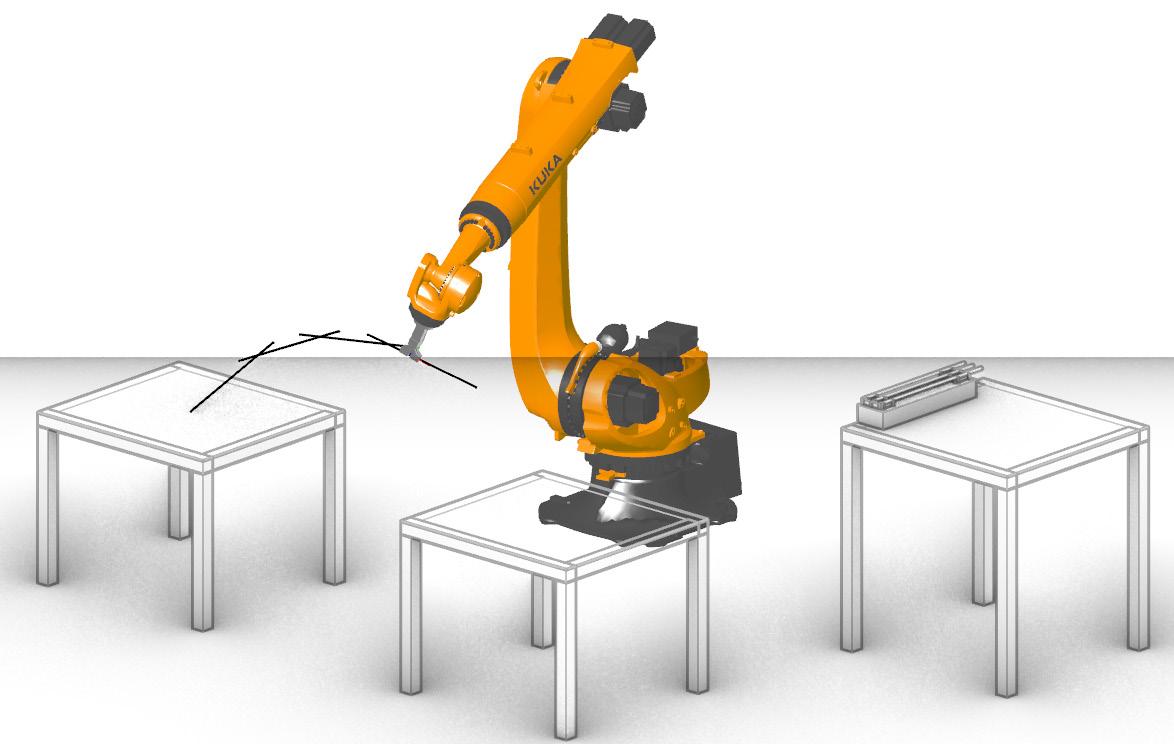
Pick & Place
Robotic Assembly
Robotic Programming - RWTH University
Instructors: Ethan Kerber
Software: Rhino - Grasshopper - KUKA|prc
Introduction to Robotic Programming” course by RWTH Aachen University offers a foundational overview of key concepts in robotics, focusing on kinematics, dynamics, and control systems. Through this course, I gained essential skills in robotic programming, learning how to effectively manage and control robot movement using tools like ROS (Robot Operating System). The course emphasized practical application, allowing me to apply theoretical knowledge to real-world scenarios. By the end of the course, I developed a strong understanding of robotic principles and honed my ability to program and control robotic systems, preparing me for more advanced work in the field of robotics.
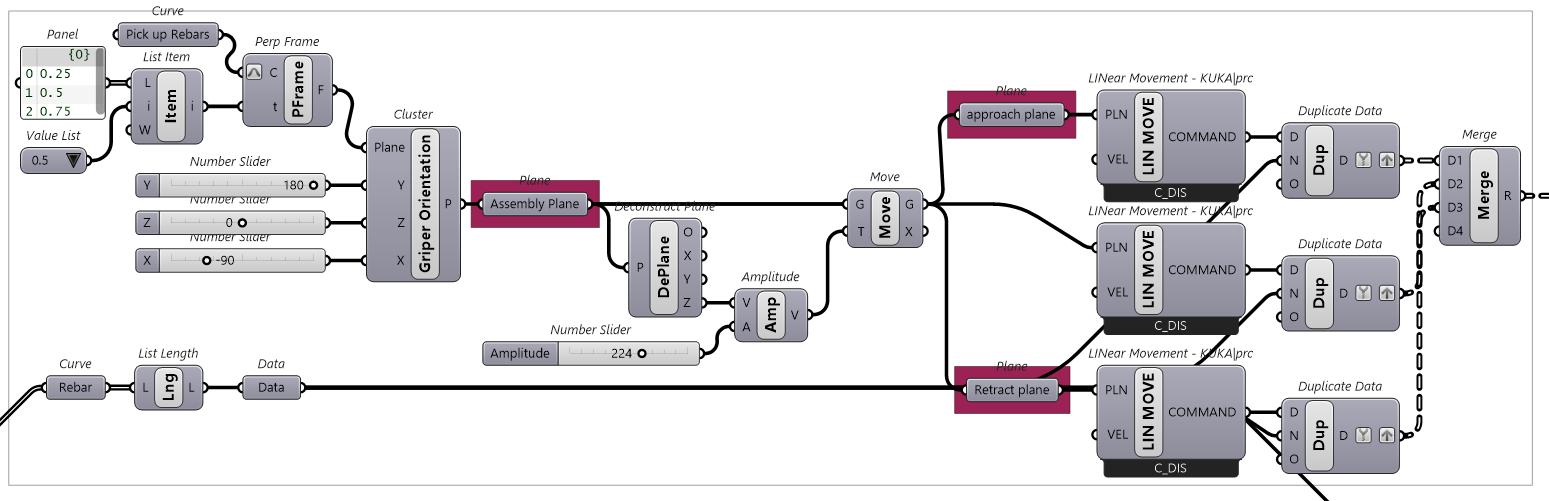
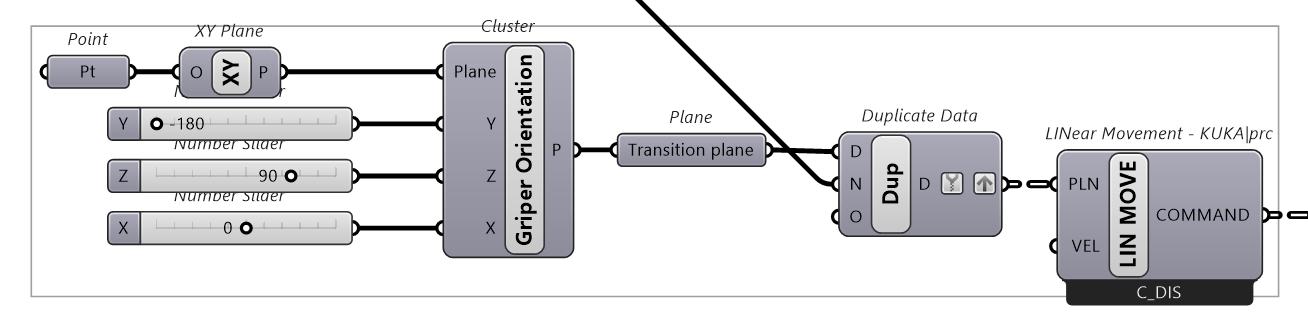
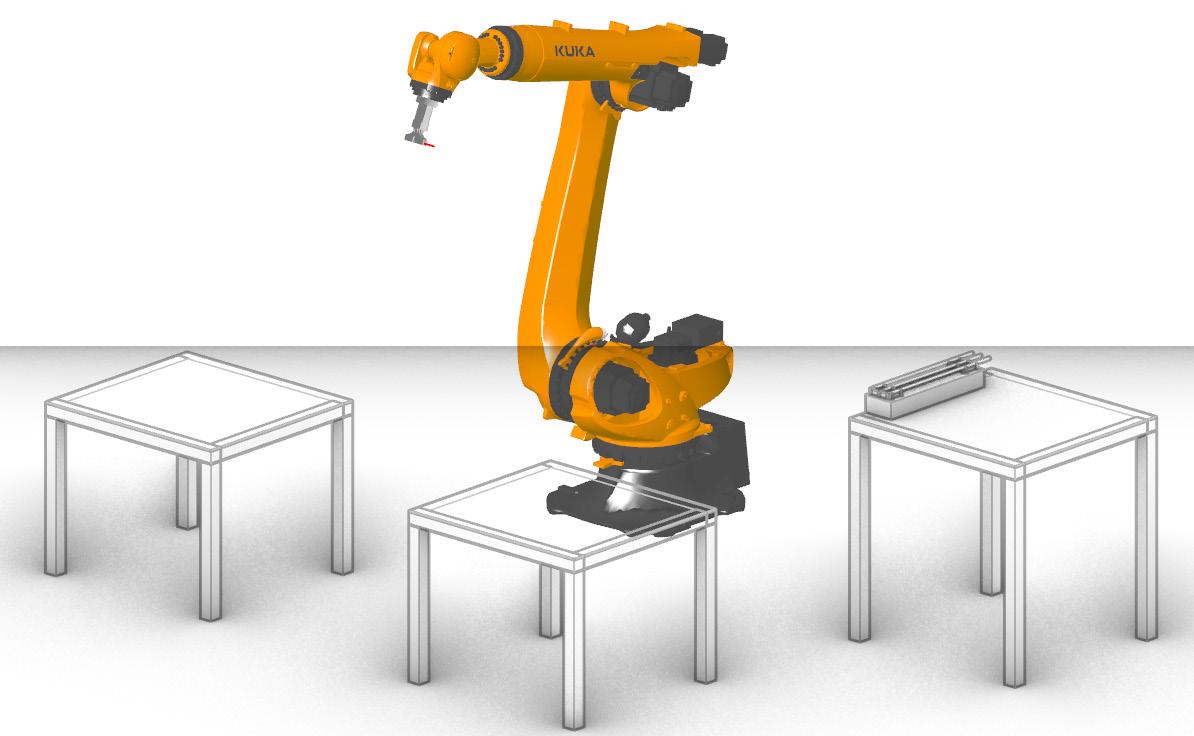
Start Position
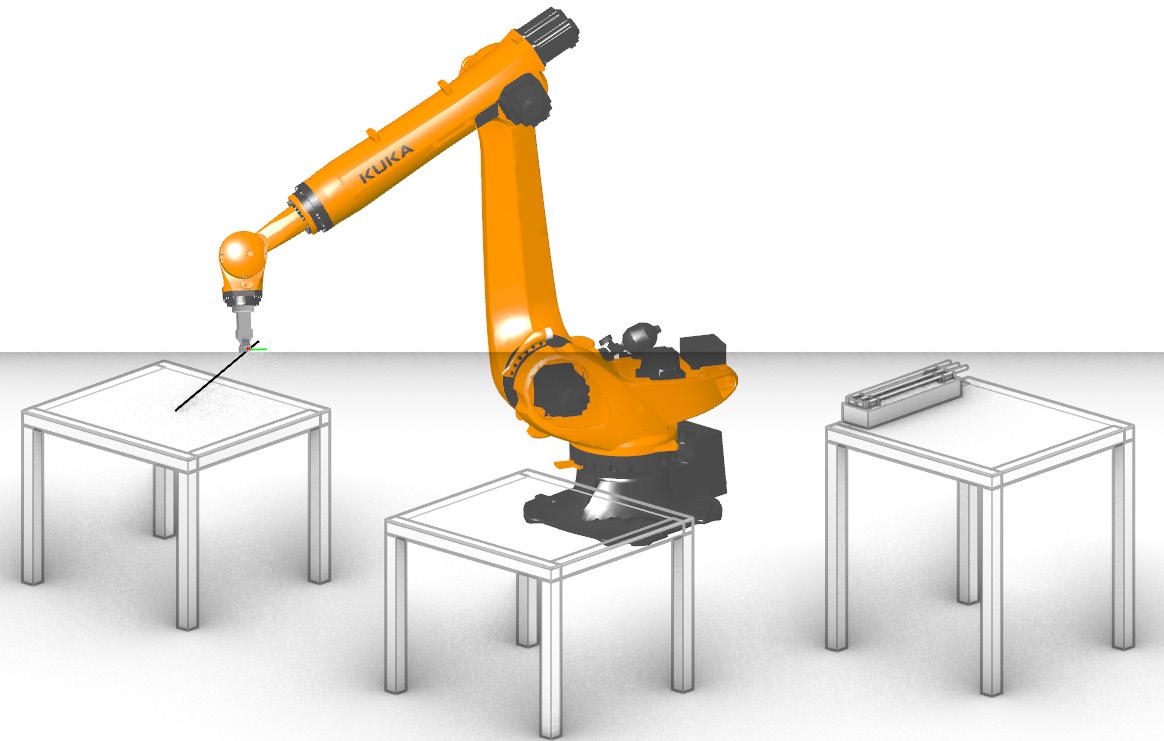
Pick up Approach Position
Gripper
Pick up Position
Pick up Retract Position
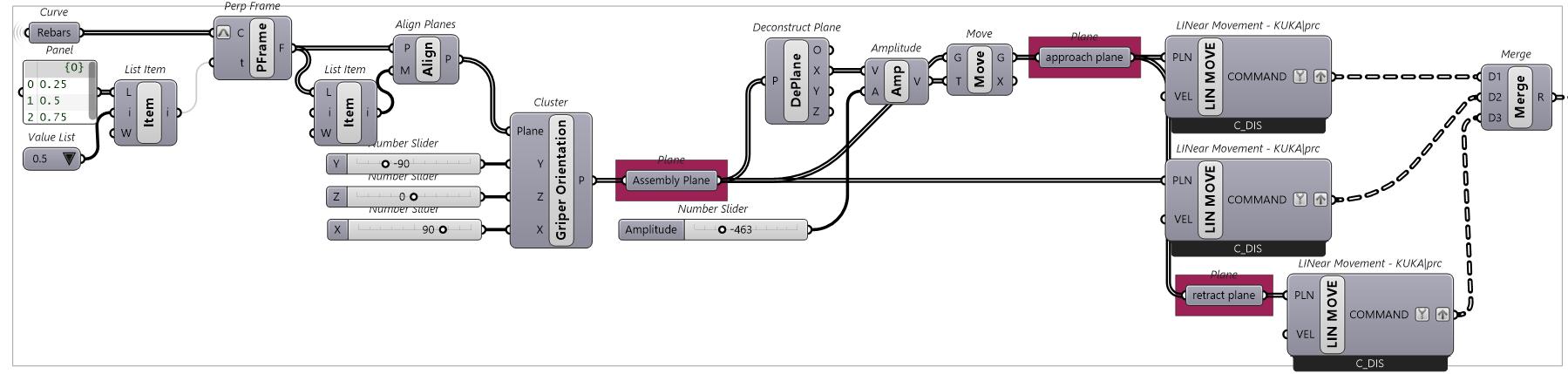
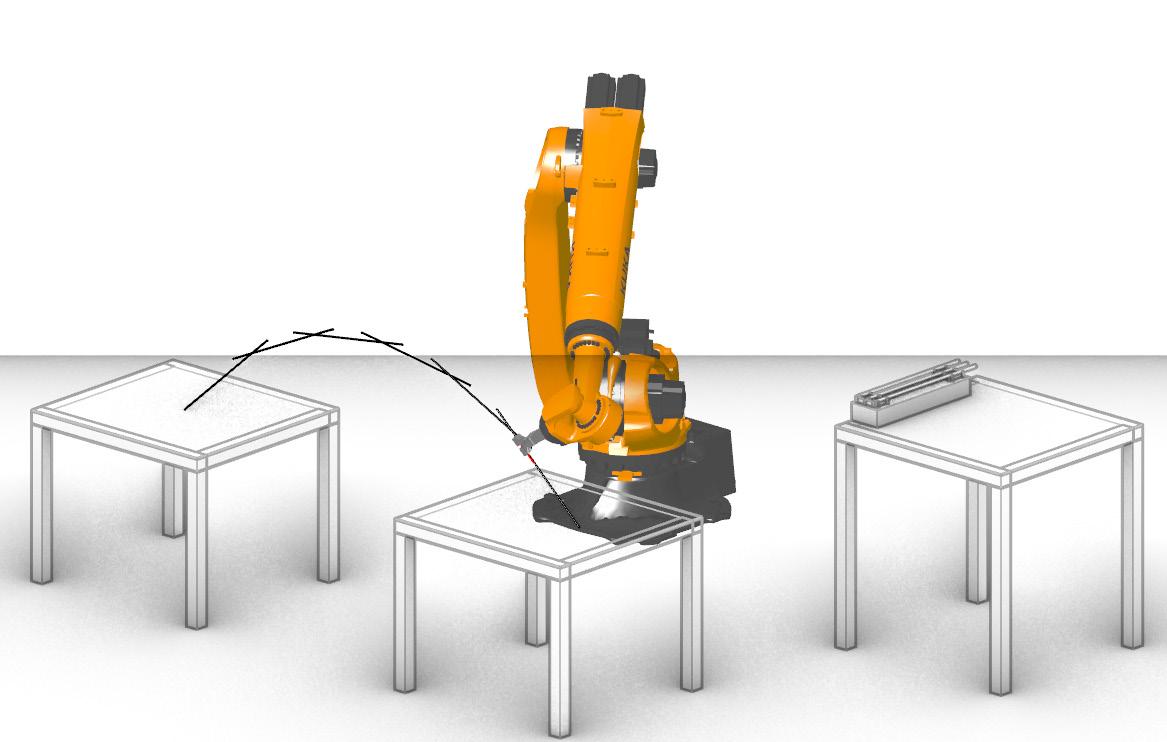
Assembly Approach Position Assembly Position
Assembly Retract Position Pick Up
Position
Open Gripper
Open Gripper
- 05 -
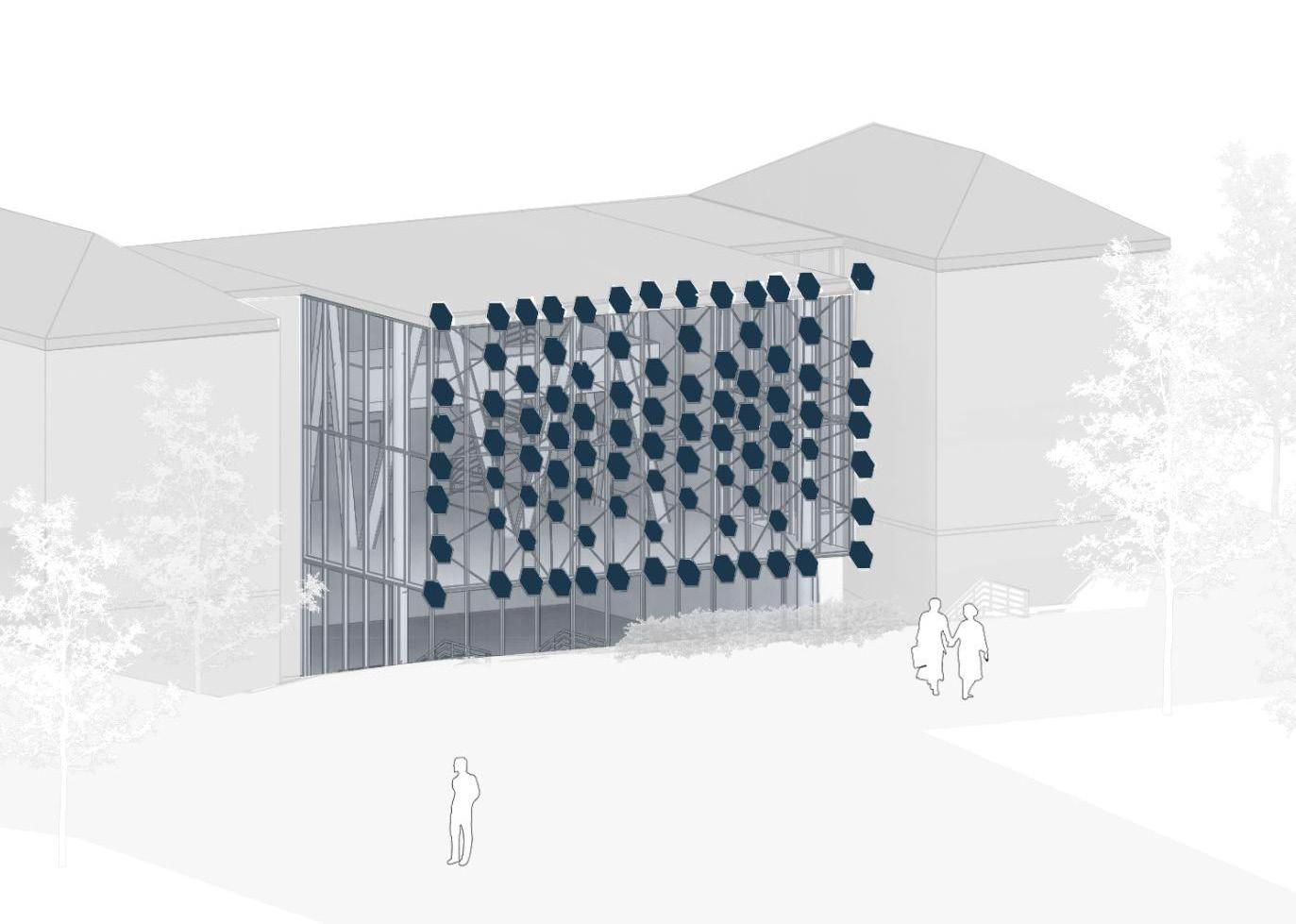
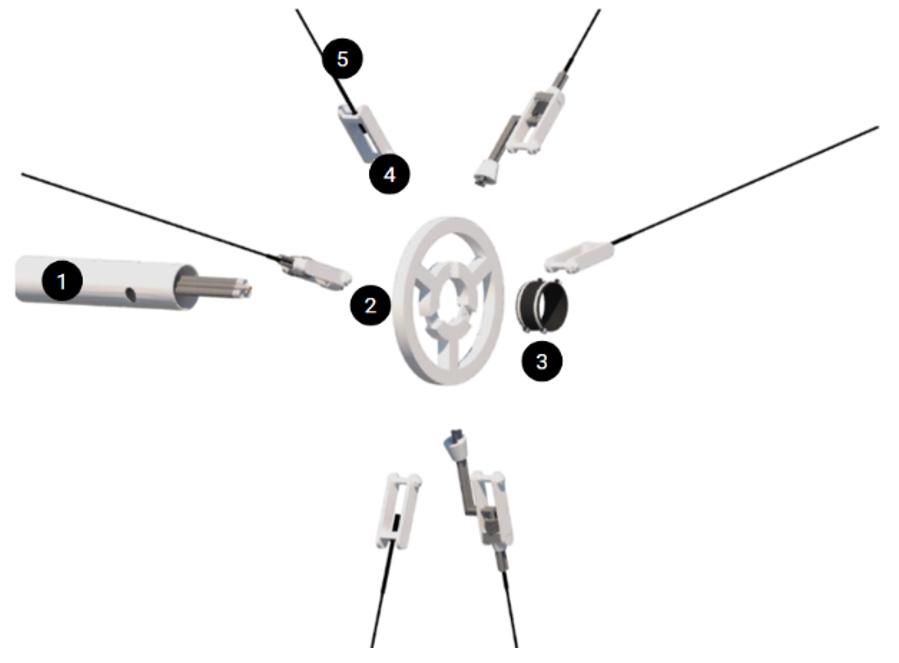
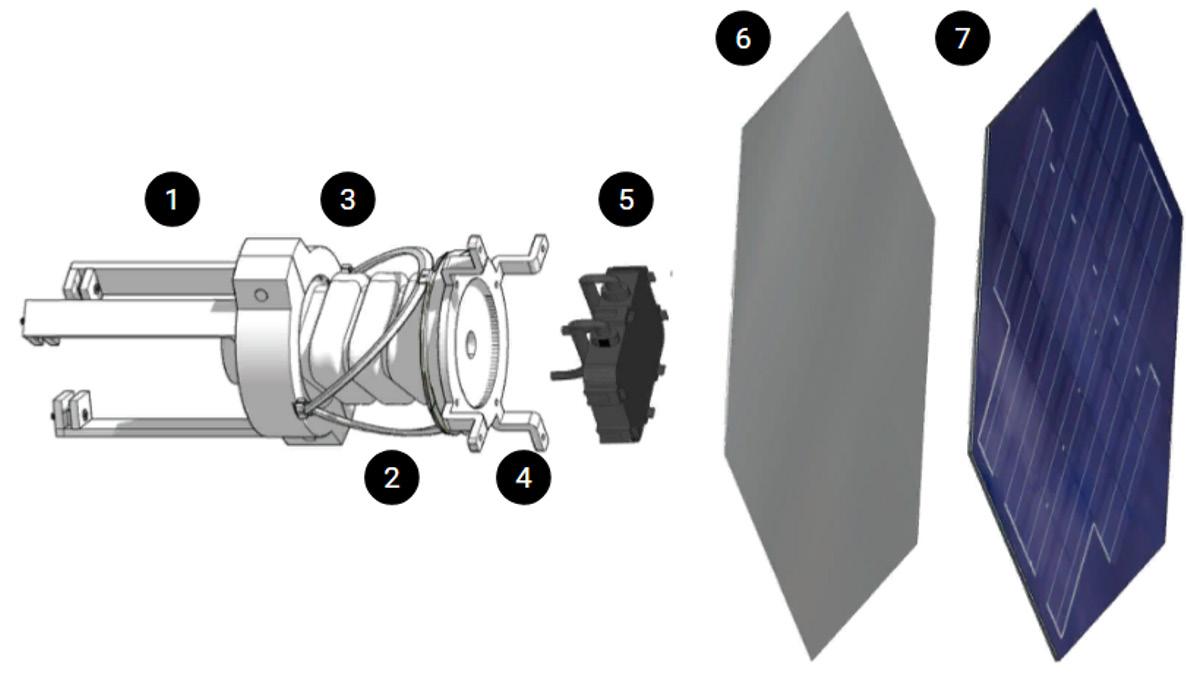
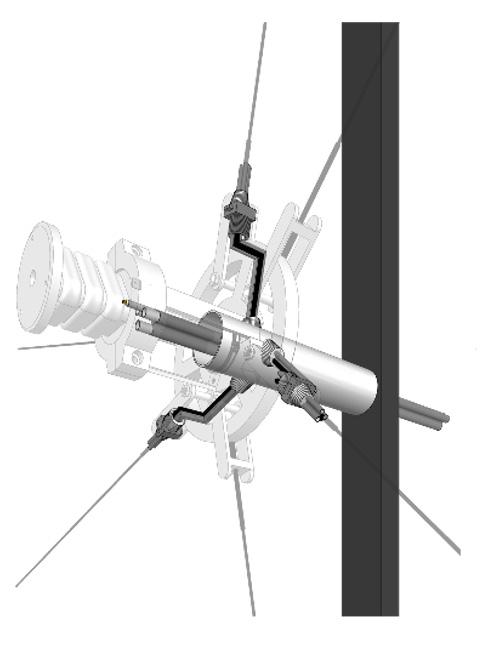
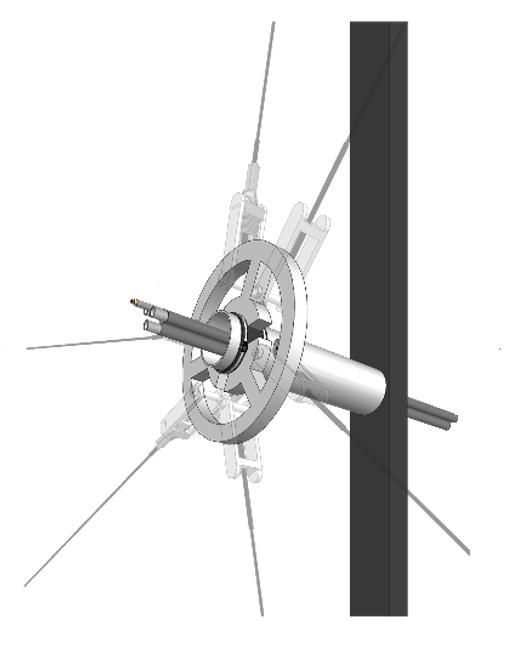
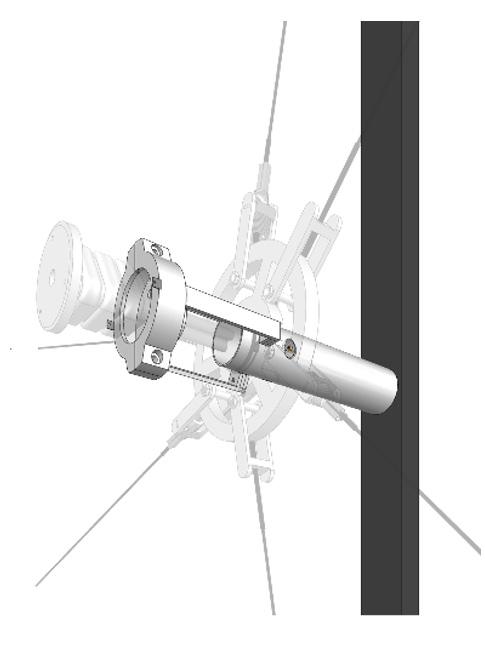
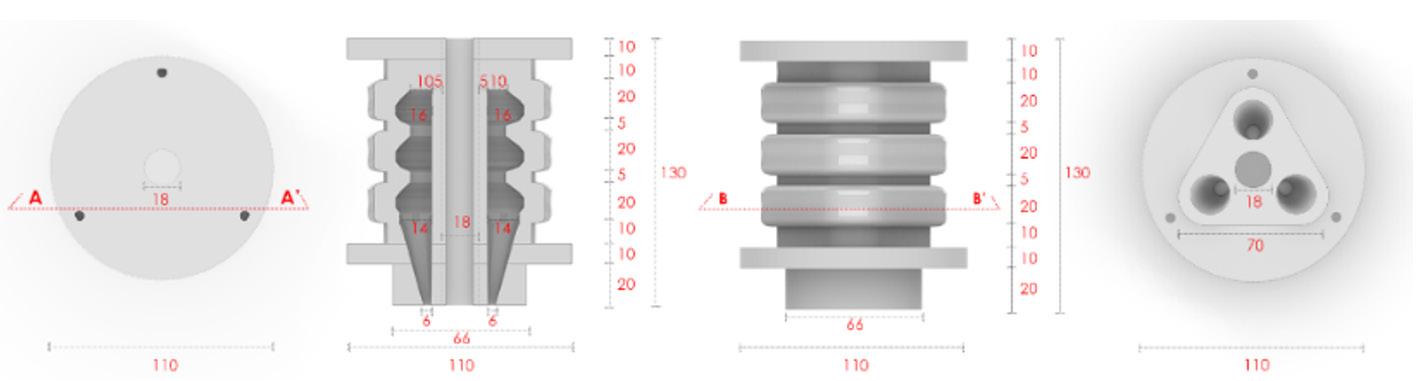
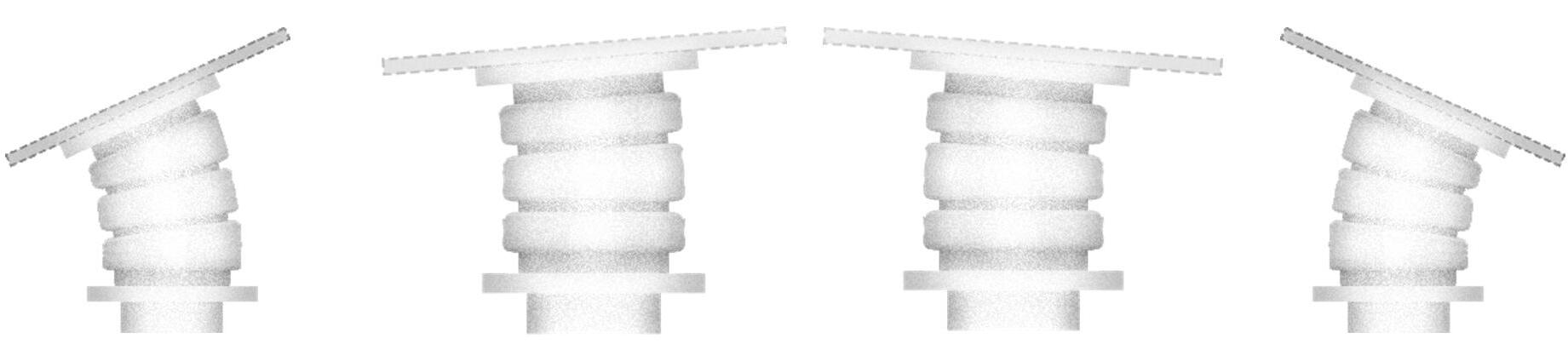
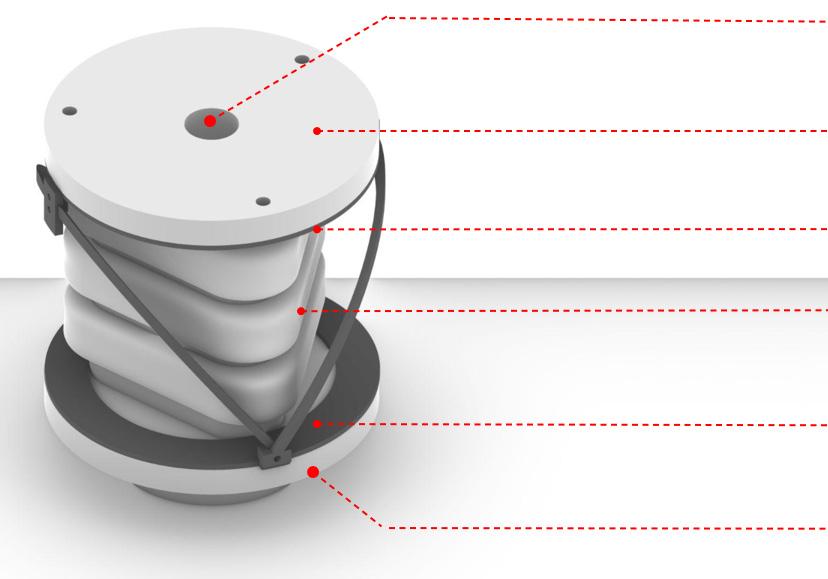
Soft Robotic Solar Facade
Soft Pneumatic Actuators
Adaptive Facade Studio - IndexLab
Supervisor: Pierpaolo Ruttico
Software: Rhino - Grasshopper
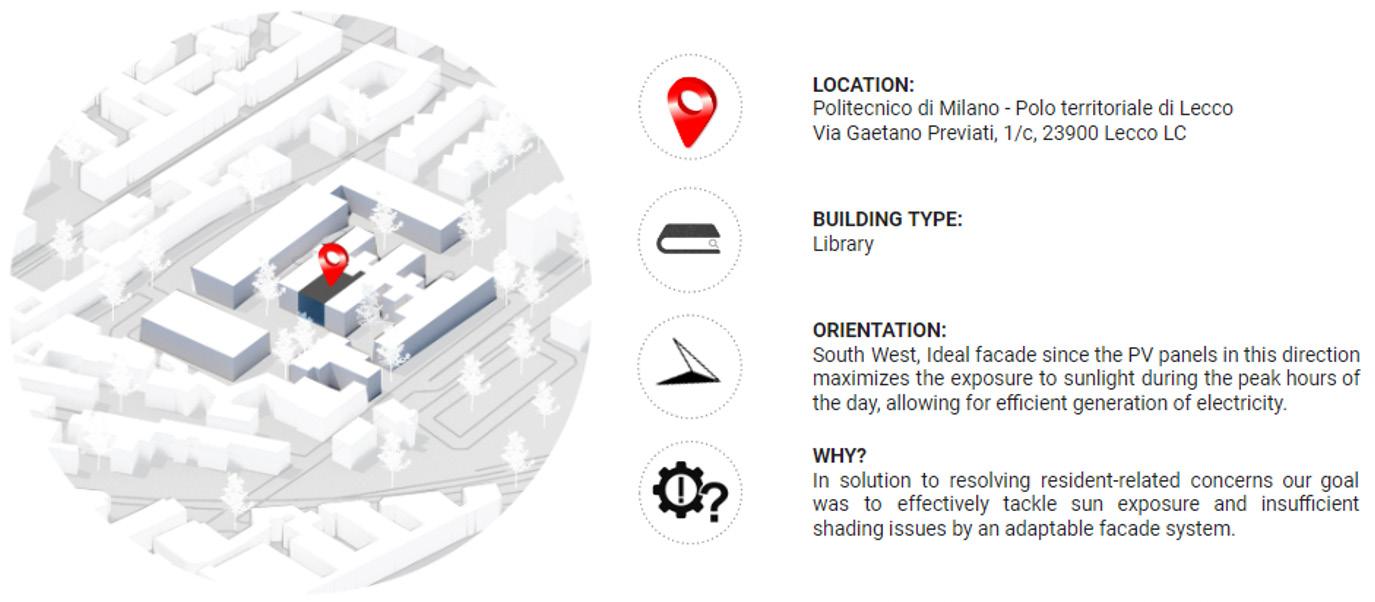
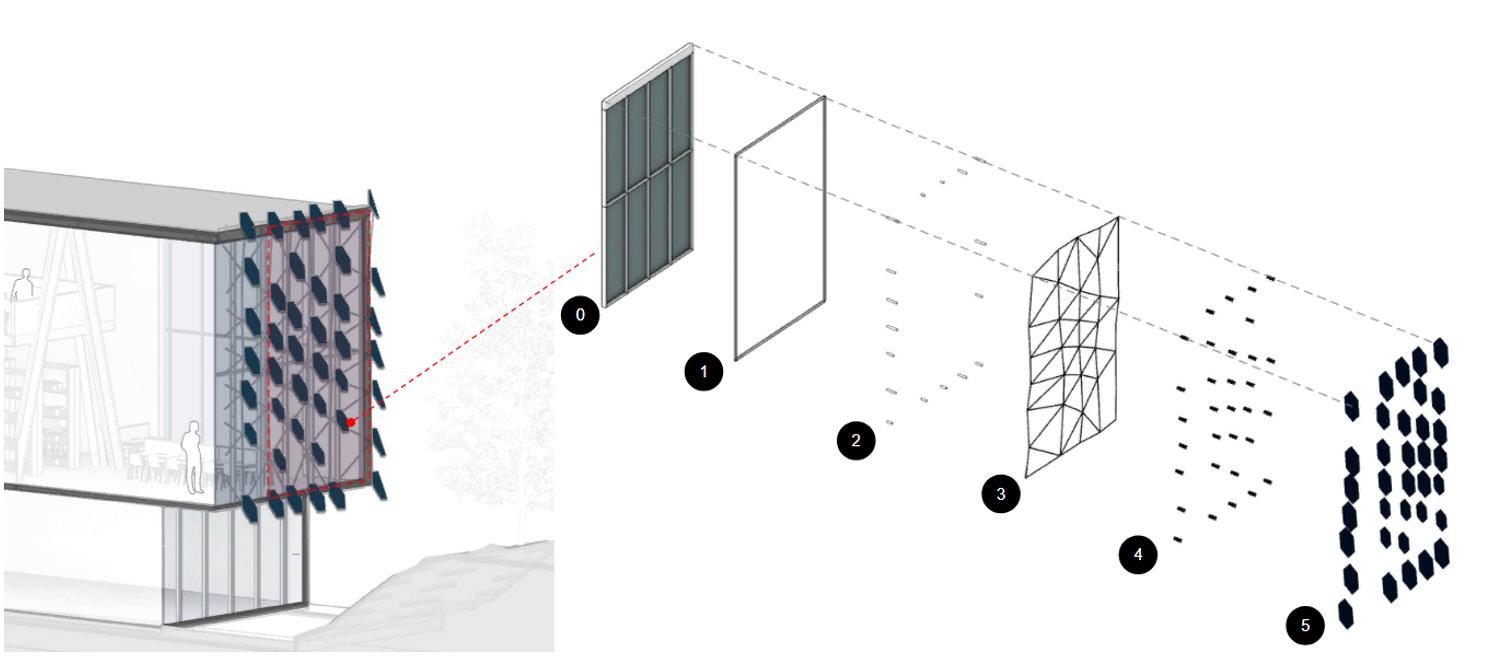
Solymorph is an integrated kinematic building facade designed to optimize energetic behavior and architectural expression through individual modules. Installed on an existing library facade at Politecnico di Milano, Lecco, this case study demonstrates significant improvements in electricity generation compared to static photovoltaic systems.
The project highlights the potential for energy savings in various climates and aims to drive advancements in sustainable building design by leveraging soft robotics and artificial intelligence. This innovative approach contributes to developing energy-efficient facade solutions for both new constructions and existing buildings.