1 minute read
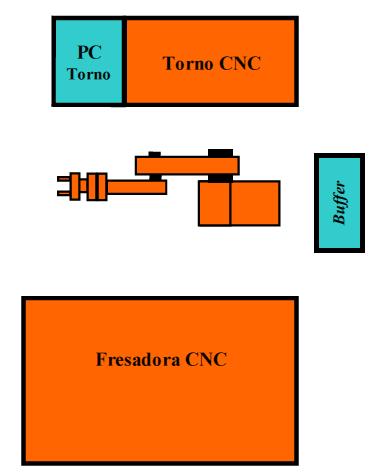
Figura 1 - Layout do robô e das máquinas CNC


Instituto Politécnico de Viseu Escola Superior de Tecnologia e Gestão de Viseu Mestrado em Engenharia Electrotécnica - Energia e Automação Industrial
1. CONTEXTUALIZAÇÃO
Advertisement
No âmbito da disciplina de Sistemas flexíveis de Fabrico desenvolveu-se um projecto
que permite ao robô carregar e descarregar peças em duas máquinas CNC (Computer Numerical Control), com base no layout da figura seguinte.
Figura 1 - Layout do robô e das máquinas CNC
A sequência de operações é a seguinte: 1. O robô vai buscar uma peça ao buffer e coloca-a na fresadora;
2. O robô volta a ir buscar uma peça ao buffer e coloca-a no torno.
3. Depois de processadas as peças, o robô descarrega as máquinas por ordem de
conclusão.
4. As peças processadas nas máquinas são colocadas no buffer de produtos
acabados, de cada máquina.
Este ciclo de trabalho é repetido até que o operador pressione o botão “Parar Produção” . Depois disso o robô deve completar o ciclo de produção e de seguida terminar.
O robô guarda um registo estatístico da produção, como por exemplo: mostrar na
consola, o número de peças produzidas em cada máquina e armazenar essa mesma
informação numa disquete (ou disco do controlador) de forma a poder ser lida em qualquer
computador.
João Vítor Pereira Ôlas (nº1503) Ricardo Jorge de Loureiro Silva (nº1841) 3
