6 minute read
RESEPI – The Complete Lidar & RGB Payload Solution


Inertial Labs has designed the Remote Sensing Payload Instrument – RESEPI – as a cost-effective solution for extremely accurate remote sensing applications. RESEPI utilizes a high-performance Inertial Labs GPS-aided Inertial Navigation System (INS) with NovAtel RTK/PPK dual antenna GNSS receiver, integrated with a Linuxbased processing platform. The processing platform enables data-logging to a USB thumb-drive and supports an external cellular/radio modem for receiving RTCM corrections. RESEPI can be used with commercially available Lidar scanners such as Velodyne, Quanergy, Ouster, RIEGL, Livox and Hesai. All components are mounted into one compact and lightweight enclosure and bore-sighted. Point cloud software is fully automated to provide optimized PPK results.
Completely modular
A third-party GNSS receiver and Lidar can be used, while Inertial Labs provides everything else required for assembling, calibrating and bore-sighting RESEPI, including training. This allows clients to maintain existing relationships and meet local production requirements, while retaining full control for customization.
a Complete remote SenSing Solution
Lidar, the required cables, mounting brackets, vibration isolator, Lidar calibration, bore-
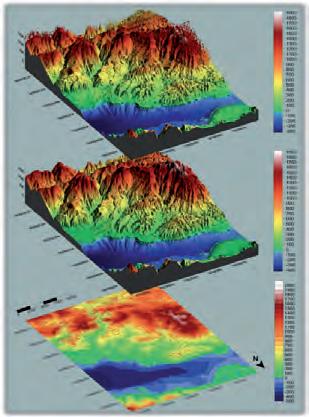
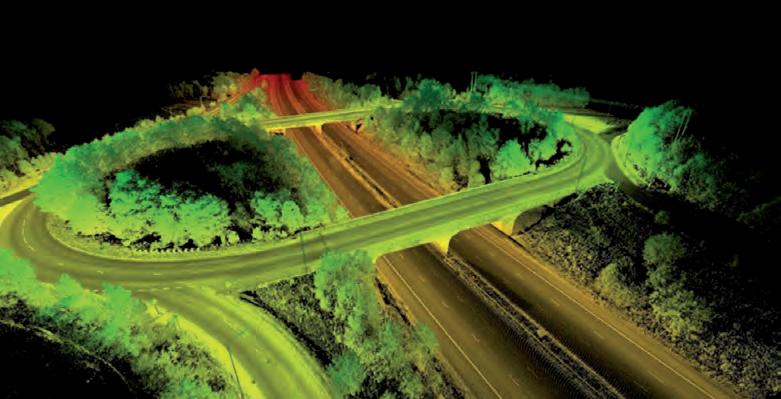
A digital terrain model, a digital surface model, and a digital elevation model (from top to bottom). Road construction point cloud.
sighting, post-processing (PPK) and point cloud software utilizing the Waypoint post-processing engine from Hexagon | NovAtel, are all available upon purchase of the RESEPI. In this way, clients and valueadded resellers can focus on growing their business rather than developing the payload product.
Weight Power consumption Position accuracy Attitude accuracy Available Lidar scanners
reSepi produCeS georeferenCed lidar point CloudS
A Lidar point cloud is a collection of millions, or even billions, of points that are used to accurately map an environment in a way similar to how a pointillism painting creates a picture. Each of these points has a location in a known coordinate system (local or global),
0.370kg (w/o Lidar and Camera) 12W (w/ Velodyne VLP-16) 0.5cm (PPK) / 1cm + 1ppm (RTK) < 0.01deg pitch & roll; < 0.05deg heading Velodyne, Quanergy, Ouster, RIEGL, Livox, Hesai
along with a value for the intensity that quantifies the amount of light energy that is recorded by the scanner. A Lidar point cloud is the product of sensor fusion across a GPS-aided INS and a Lidar scanner. Each sensor plays a critical role in how the Lidar payload functions and the applicability of its point cloud output.
How reSepi tranSformS BuSineSSeS
For many applications, one of the first steps in the post-processing of any point cloud is to classify the points. Point classification is the process of identifying the type of object that the point is reflected from. For instance, if a laser pulse is reflected from a tree, the resultant point could be classified as vegetation. Point classification categories can be as broad as ground vs. non-ground, or as specific as the type of structure/feature that the laser pulse was reflected from. Using Lidar processing software such as the ROCK Cloud, users can easily classify points as a variety of features.
data analySiS
The next step is data analysis. Point classification algorithms group points together based on their spatial-based and echo-based features. A Lidar point’s spatial features include the point’s environment, height features, eigenvalue features, local plane features, plane slope and more. Echo-based features such as terrain echo and vegetation echo are determined using the return pulse from the surface. The return number (first, second, last, etc.) also plays a role in determining a pulse’s echo-based features. One or both of these features are integral in the accurate automatic classification of vegetation, buildings and ground surfaces.
Point classification provides the foundation to create models such as DTMs, DEMs and DSMs. It also makes it easy to obtain just the bare Earth data for DEMs and DTMs, while also allowing for DSMs to be created by including points from man-made and natural features.
dtm, dSm and dem
A DTM provides a digital description of a surface with a set of heights over two-dimensional points on a reference surface. This reference surface can be an ellipsoidal, geoidal or mean sea level height or a geodetic datum. These unique heights are a set of approximate values between these points and a reference surface. DTMs are the only representative of the bare ground of the terrain and therefore do not measure heights of vegetation or man-made features. DTMs are often mathematically represented as 2D raster or matrix grids, irregularly distributed 2D points, 1D profiles, contours/lines of constant elevation and Fourier series. DTMs can be used to calculate derived values such as volumes, slopes, contours, drainage and gravitational attraction. Values such as these are instrumental in the planning of roads, railways, drainage, inundations and much more.
A DSM, similarly to a DTM, is a collection of points with different height values. The main difference between a DSM and a DTM is that a DSM is composed of more than just bare Earth heights, as heights also come from natural and man-made features. This is especially useful in vegetation management applications as it is possible to see where and to what extent vegetation is encroaching on a structure such as a utility line. It is also useful in urban planning applications as DSMs can determine how proposed buildings would obstruct the view of city residents.
A DEM is a raster grid of the bare Earth referenced to a vertical datum. DEMs only contain ground points and exclude man-made and natural structures. Formerly derived from topographic maps, DEMs are increasingly derived from high-resolution Lidar. Since DEMs are a collection of ground points with varying height values, they are especially prevalent in hydrology in the delineation of watersheds and calculation of flow direction and accumulation. DEMs are also helpful for analysing terrain stability in
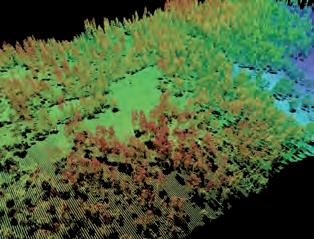
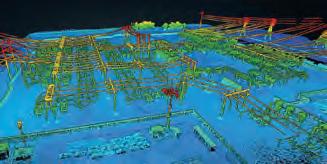
Vegetation point cloud. Utility Station point cloud.
high slope areas. This can provide valuable information for users looking to build structures such as highways or buildings in these areas.
The ROCK Cloud provides vegetation management on-demand. It takes 3D point clouds and rapidly analyses them to find locations and measurements of vegetation encroaching on power line assets. This data can be communicated as a classified LAS point cloud, map icons or SHP files.
ConCluSion
Data collected by Lidar can provide valuable metrics for a wide variety of applications. From topographic mapping to asset inspection and site monitoring, the Inertial Labs RESEPI is a quick and efficient way to generate models of an environment. Beyond producing a nice-looking 3D model, Lidar can provide actionable data that is of immediate value to any inspection or mapping service. With the advances in modern Lidar data, data can be displayed in a way that is almost identical to how it appears in reality and provides comparable accuracy to field surveys. With the ability to perform customized analysis in line with the priorities and risks of an application, owners have the power of understanding what needs to be done. With custom options and a great price-performance ratio, Inertial Labs is working hard to provide high-quality solutions for a variety of applications at an affordable price.
Contact information
Inertial Labs, Inc. Address: 39959 Catoctin Ridge Street, Paeonian Springs, VA 20129 U.S.A. Phone: +1-703-880-4222 E-mail: info@inertiallabs.com Website: www.inertiallabs.com





