
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Prerna
Bharti1 , Tanmay Band2, Prajwal Thorat3, Akansha Chauhan4
1Prerna Bharti, Dept. of Computer Engineering, Ajeenkya D Y Patil University, Pune, India
2Tanmay Band, Dept. of Mechanical Engineering, Ajeenkya D Y Patil University, Pune, India
3Prajwal Thorat, Dept. of Mechanical Engineering, Ajeenkya D Y Patil University, Pune, India
4Akansha Chauhan, Dept. of Computer Engineering, Ajeenkya D Y Patil University, Pune, India
Abstract - This research paper explores the implementation of advanced driver assistance system (ADAS) features in a smallscale car model. The study focuses on the use of Arduino Uno and Raspberry Pi microcontrollers for integrating various ADAS functionalities such as, safe distance monitoring, obstacle avoidance, emergency braking, lane keep assist, and adaptive cruise control. The research outlines the components used in the project and discusses the successes and limitations encountered during the implementation process. Specifically, it highlights the challenges faced with the Arduino Uno boards and the decision to transition to Raspberry Pi for handling more complex ADAS features. The paper concludes with insights into the suitability of different microcontrollers for ADAS applications in small-scale models.
Key Words: AdvancedDriverAssistanceSystem,ArduinoUno,RaspberryPi,Microcontroller,AdaptiveCruiseControl.
AdvancedDriverAssistanceSystems(ADAS)representatransformativetechnologyintheautomotiveindustry,offeringasuite ofintelligentfunctionalitiesaimedatimprovingvehiclesafety,enhancingdrivingexperience,andreducingthelikelihoodof accidents.Thesesystemsutilizeacombinationofsensors,actuators,andcontrolalgorithmstoprovidereal-timeassistanceto drivers,therebymitigatingrisksassociatedwithhumanerrorandenvironmentalfactors.Inrecentyears,theintegrationof ADASfeatureshasgainedsignificanttractionnotonlyinfull-scalevehiclesbutalsoinsmall-scalecarmodelsforeducational, research,andprototypingpurposes.
TheimplementationofADASfeaturesinsmall-scalecarmodelspresentsauniquesetofchallengesandopportunities.While scaled-downmodelslackthecomplexityanddynamicsoffull-sizedvehicles,theyprovideacost-effectiveplatformfortesting andvalidatingADASfunctionalitiesincontrolledenvironments.Moreover,small-scalemodelsoffera practicalmeansfor students,researchers,andenthusiaststogainhands-onexperiencewithADAStechnology,fosteringinnovationandlearningin thefieldofautonomousandsemi-autonomousdrivingsystems.
TheprimaryobjectiveofthisresearchistoexplorethefeasibilityofintegratingvariousADASfunctionalitiesintoasmall-scale carmodelusingmicrocontrollers,specificallyArduinoUnoandRaspberryPi.Thesepopularmicrocontrollerplatformsoffer versatileprogrammingcapabilitiesandeaseofuse,makingthemidealcandidatesforprototypingADASsystemsinminiature vehicles. By leveraging the capabilities of microcontrollers, we aim to replicate key ADAS features such as safe distance monitoring,obstacleavoidance,emergencybraking,lanekeepassist,andadaptivecruisecontrolinoursmall-scalecarmodel.
The integration of ADAS features in small-scale car models holds immense educational value, providing students and enthusiasts with hands-on experience in sensor fusion, signal processing, control theory, and software development. Furthermore,itenablesresearcherstoexperimentwithnovelalgorithmsandtechniquesforenhancingtheperformanceand robustnessofADASsystemsinreal-worldscenarios.Bybuildingandtestingasmall-scaleADAS-equippedcarmodel,weseek tobridgethegapbetweentheoryandpractice,empoweringindividualstogaininsightsintothecomplexitiesandchallengesof autonomousdrivingtechnology.
Inthisresearch,wefocusontheimplementationofADASfunctionalitiesusingreadilyavailablecomponentssuchasArduino Uno boards, motor shields, sensors, and actuators. These components offer a cost-effective and accessible solution for constructing small-scale car models with ADAS capabilities. Through a systematic methodology, we integrate each ADAS featureintothecarmodel,ensuringproperfunctionalityandperformanceundervariousdrivingscenarios.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Theoutcomesofthisresearchhaveimplicationsforbothacademiaandindustry.Foreducators,thesmall-scaleADAS-equipped carmodelservesasavaluabletoolforteachingconceptsrelatedtorobotics,controlsystems,andartificialintelligence. For researchers,itoffersaplatformfortestingandvalidatingADASalgorithmsinacontrolledenvironmentbeforedeploymentin full-scale vehicles. Additionally, for hobbyists and enthusiasts, it provides an opportunity to explore the exciting field of autonomousdrivingandcontributetothedevelopmentofinnovativesolutions.
Inthefollowingsectionsofthispaper,wewilldelveintothemethodologyusedforintegratingADASfunctionalitiesintothe small-scalecarmodel,presenttheresultsofourexperiments,discusstheimplicationsofourfindings,andofferconclusions andrecommendationsforfutureresearchinthisdomain.Throughthisresearch,weaimtocontributetothegrowingbodyof knowledge on ADAS technology and inspire further advancements in the field of autonomous and semi-autonomous drivingsystems.
Researchinthefieldofadvanceddriverassistancesystems(ADAS)hasunderscoredthecriticalroleofintegratingintelligent functionalitiestoenhancevehiclesafetyandmitigateaccidents.StudieshaveextensivelyexploredvariousADASfeaturessuch as safe distance monitoring, obstacle avoidance, emergency braking, lane keep assist, and adaptive cruise control. These functionalitiesaimtoaugmentdriverawareness,automatecertaindrivingtasks,andultimatelyreducetheriskofcollisions. PreviousinvestigationshavedemonstratedthefeasibilityofimplementingADASfeaturesinsmall-scalecarmodelsusing microcontrollersliketheArduinoUno.SuchendeavorshavehighlightedtheversatilityoftheArduinoplatformforcontrolling motors,interfacingwithsensors,andexecutingcomplexalgorithms.
However,literaturealsoelucidatesthelimitationsofArduinoUnoinhandlingcomputationallyintensivetasks,particularly when implementing advanced features like adaptive cruise control. Consequently, researchers have sought alternative microcontrollersolutionssuchasRaspberryPi,whichoffergreatercomputationalcapabilitiesandflexibility.Nonetheless,the literatureunderscoresthesignificanceofselectingmicrocontrollersbasedonprojectrequirements,balancingcomputational power,cost-effectiveness,andeaseofprogrammingforsuccessfulintegrationofADASfeaturesinsmall-scalecarmodels.
Inthiscomprehensivesynthesisofresearchinthefieldofautomotivetechnology.AStudyonDriverlessCarTechnologiesand ImplementationofaSensor-BasedSpeed-ControlledAutonomousVehicle.Thispapercomparestheeffectivenessofsensor fusion (combining data from multiple sensors) for autonomous vehicles using Arduino and Raspberry Pi. It explores the advantagesanddisadvantagesofeachplatformfordifferentsensortypesandprocessingrequirements.
DevelopmentofLow-CostAutonomousCarusingArduinoUnoandArtificialNeuralNetwork.Thisresearchfocusesonbuilding abudget-friendlyautonomouscarusingArduinoUno.Itexplorestheuseofanartificialneuralnetworkfordecision-making basedonsensordata,offeringanalternativeapproachtotraditionalprogrammingmethods.
ImplementingLaneDetectionAlgorithmforAutonomousVehiclesonArduinoUno.Thispaperexplorestheimplementationof alanedetectionalgorithmspecificallyforArduinoUnoinanautonomousvehiclecontext.Itdelvesintothetechnicaldetailsof imageprocessingandlanelineidentificationonthismicrocontrollerplatform
Designandimplementationofself-drivingcartheresearchpaperoutlinesthedevelopmentprocessandpracticalapplicationof aself-drivingcarsystem,coveringdesignprinciplesandimplementationstrategiesforautonomousnavigationandcontrol, offeringinsightsintoadvancementsinautonomousvehicletechnology
ResearchbyHuseyinYANIK,ErdemUYSALandAbdullahELEWIin(2018)in“MultitaskingDriveAssistanceSystemUsing ArduinoUno” offer insights into the Leveraging Arduino Uno's capabilities, the systemoffersa cost-effective solution for deployingdriverassistancefunctionalities,potentiallymitigatingrisksassociatedwithhumanerrorontheroad.
MeenuGupta,RakeshKumar,SunainaDas,RohanSharma(2023)in“Arduino-BasedReal-TimeObstacleDetectioninVehicles UsingProximitySensors”focusesonsensorintegrationandreal-timeprocessing,thesystemaimstomitigaterisksassociated withdriving.
ThemethodologyemployedintheconceptualizationanddevelopmentoftheADASwasdeeplyrootedinresearch-driven insightsandanalysis.Drawinguponamultifacetedapproachencompassingliteraturereviews,on-fieldsurveys,administrative
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
discussionsinterviews,andstakeholderconsultations,wesystematicallyidentifiedandsynthesizedthekeyresearchfindings thatunderpinnedthedesignandimplementationofthesystem.
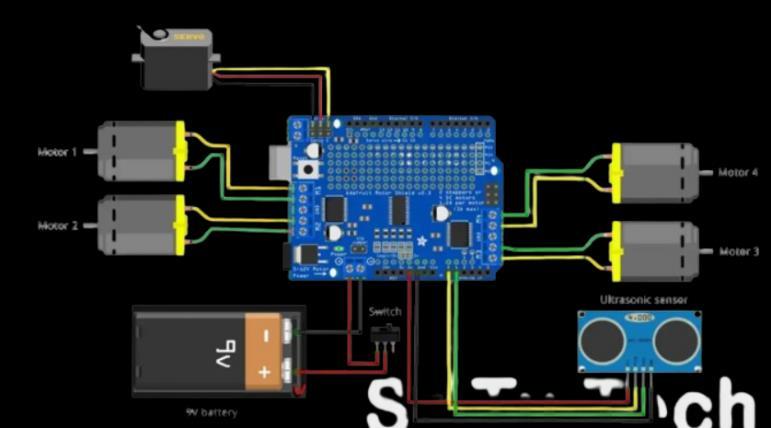
Thecomponentsutilizedinthisprojectforimplementingadvanceddriverassistancesystem(ADAS)featuresusingthe ArduinoUnoboardincludeessentialhardwareandsensorscrucialforthefunctionalityofthesmall-scalecarmodel.These components collectively form the backbone of the ADAS implementation, contributing to the enhancement of safety and functionality.
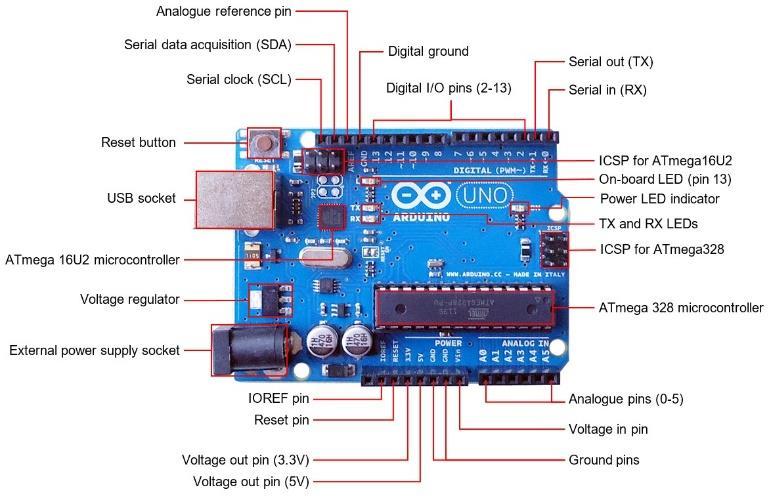
SampleTheArduinoUnoR3,poweredbytheATmega328Pmicrocontroller,servesasthecorecomponentoftheEnhanced DriverAssistanceSystemVehicle,functioningasthecentralprocessingunitresponsibleforexecutingcontrolalgorithmsand processingsensor data.ItsarrayofInput/Output(I/O)pinsfacilitatesseamlessinterfacingwitha variety ofsensorsand actuators,enablingeffectivecommunicationandcontrolwithinthesystem.Moreover,theArduinoUnoR3'scompatibilitywith theArduinoIntegratedDevelopmentEnvironment(IDE)streamlinesprogrammingprocesses,empoweringdevelopersto effortlesslyuploadcodeandimplementupdatestoenhancesystemfunctionalities.
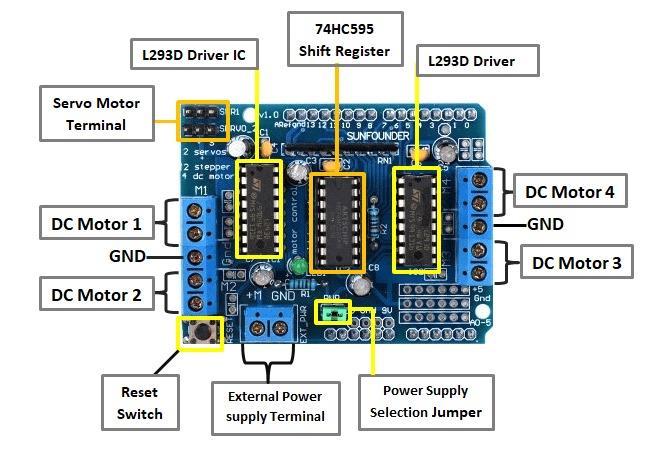
TheL293DMotorShieldplaysavitalroleinoverseeingthemovementoftheVehiclebyofferingauser-friendlyinterfacefor managinguptofourgearmotors.Itsfeaturesencompassprecisecontrolovermotorspeedanddirection,ensuringseamless mobility. Integrated effortlessly with the Arduino Uno, it streamlines motor control through software programming. Additionally,theshieldincorporatesovercurrentprotectionmechanisms,safeguardingthemotorsfrompotentialdamage,thus enhancingtheoverallreliabilityofthesystem.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
3.1.3 Ultrasonic Sensor:
The ultrasonic sensor serves a pivotal role in ensuring safe distance maintenance and obstacle avoidance for vehicles, utilizingultrasonicwavestomeasuredistancesandnavigateeffectively.Offeringhighprecisionindistancemeasurement,it enablesvehiclestonavigatewithaccuracy,whileprovidingreal-timedatainputtotheArduinoUnofordynamicdecisionmaking,ensuringswiftandadaptiveresponsestochangingenvironments.

3.1.4 Servo Motor:
Theservomotorplaysapivotalroleinsteeringcontrol,facilitatingtheimplementationofthelanekeepassistfeatureby offering precise angular control for steering adjustments. Integrated seamlessly into the steering mechanism, it ensures responsiveandaccuratelanekeepassistfunctionality,blendingseamlesslywiththevehicle'ssystemstoenhancesafetyand drivingexperience.Theservomotorplaysapivotalroleinsteeringcontrol,facilitatingtheimplementationofthelanekeep assistfeaturebyofferingpreciseangularcontrolforsteeringadjustments.Integratedseamlesslyintothesteeringmechanism, itensuresresponsiveandaccuratelanekeepassistfunctionality,blendingseamlesslywiththevehicle'ssystemstoenhance safetyanddrivingexperience.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072

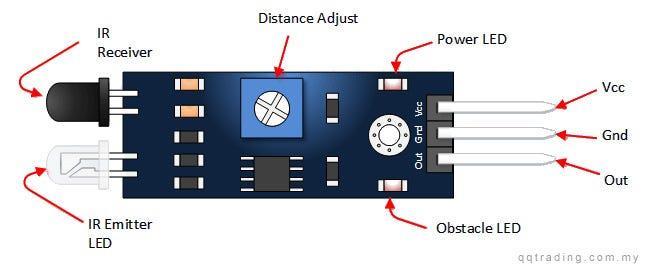
Infraredsensorsplayavitalroleinvehiclesafety,primarilybydetectingobstaclesalongthevehicle'spathandactivating emergencybrakingwhennecessary.Thesesensorsexcelintheirabilitytoswiftlyidentifyobstaclesincloseproximitytothe vehicle,providingrapidinputtothecontrolsystemforimmediateresponsetopotentialhazards.Theirversatilityextends beyondvehicleapplications,astheycanbeemployedinvariousobstacledetectionscenarios,showcasingtheiradaptabilityand effectivenessacrossdifferentenvironmentsandcontexts.
3.1.6
Thevehicleincorporatesfourgearmotors,responsibleforitsmovement,andoperatedthroughtheL293DMotorShield. Four tires are essential for mobility, offering traction and support. Jumper wires facilitate reliable electrical connections betweencomponents,ensuringseamlessfunctionalityofthevehicle'ssystems.
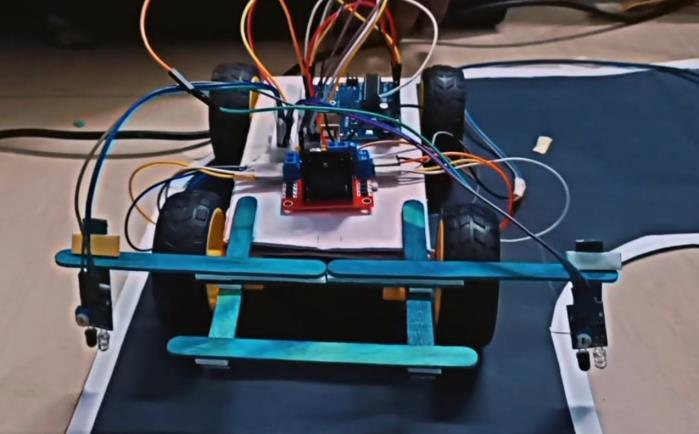
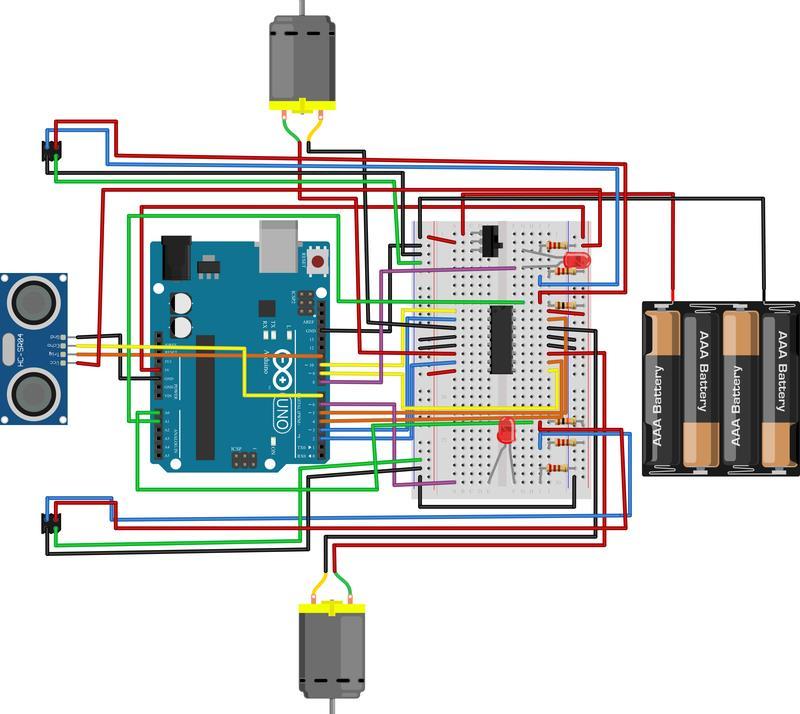
Theadvanceddriverassistancesystem,knownasADASVehicle,isconstructeduponanextensivearrayofcomponents meticulously designed to synergize computing power, motor control, sensor capabilities, and actuation mechanisms. The successfulimplementationofADASVehiclefunctionsreliesontheseamlessintegrationofmultiplecomponents,ensuring cohesiveoperationandtherealizationofdesiredcharacteristicsinautomotiveassistanceandsafetysystems.
The wiring schematics and circuit connections of the ADAS Vehicle were carefully inspected to guarantee smooth integrationandappropriatecommunicationbetweenthevariouscomponents.Forthesystemtooperatedependably,these linksmustbeimplementedprecisely.
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
3.2.1
TheL293DMotorShieldactsasacrucialintermediarybetweentheArduinoUnoandthevehicle'spropulsionsystem, connecting four gear motors responsible for driving its movement. The accompanying wiring diagram outlines key connections:motorpinstotheL293DMotorShield,powersupplylinkage,andwiringconfigurationsensuringgranularmotor control.Thismeticuloussetupnotonlyfacilitatessynchronizedmovementbutalsoensuresresponsivebehaviortocontrol signalsoriginatingfromtheArduinoUno,therebyoptimizingthevehicle'sperformanceandmaneuverability.
3.2.2
TheADASVehicleutilizesbothultrasonicandinfraredsensorstogatherenvironmentaldata,crucialforitsoperations. ThewiringdiagramdelineatestheconnectionoftheultrasonicsensortodesignatedpinsontheArduinoUno, outlinesthe wiringarrangementforinfraredsensors,emphasizinginputandoutputconnections,andincludespowersupplyspecifications foroptimal sensor performance.Clearandaccuratesensorconnectionsare imperativeforreal-time data acquisitionand facilitatingtheVehicle'sdecision-makingprocessesbasedonitssurroundings.
3.2.3
ArobustpowersupplysystemisparamountforthefunctionalityoftheADASVehicle,encompassingvariouselementsin itswiringdiagram.ThisdiagramdetailstheconnectionofpowersourcestocrucialcomponentssuchastheArduinoUno, L293DMotorShield,andothers,whilespecifyingvoltageandcurrentrequirementstomaintainstableandreliableoperation. Additionally, it carefully considers power distribution to motors, sensors, and the servo motor, ensuring consistent functionalityacrossallcomponentsandmitigatingvoltagedips.Inessence,adependablepowersupplysystemisindispensable toupholdthevehicle'sperformanceandoperationalintegrity.
3.2.4
ThecomprehensivewiringdiagramprovidesanintricateoverviewofallelectricalconnectionswithintheADASVehicle, encompassinginterconnectionsamongtheArduinoUno,L293DMotorShield,sensors,motors,andservomotor.Annotated labelsaccompanyeachconnectionpoint,elucidatingtheirrespectivepurposesandfunctions,whiledelineatingcontrollines, datalines,andpowerlinesforasystematiccomprehensionofthesystemarchitecture.Servingasacrucialresource,thewiring diagram facilitates troubleshooting, maintenance, and future advancements of the ADAS Vehicle by presenting the entire systemarchitectureinaclearandorganizedmanner.
AnAdvanceDriverAssistanceSystem(ADAS)'s(oritscomponentsandinteractions)structureisdefinedduringthecrucial SystemArchitectureDesignphaseofdevelopment.Thisisathoroughexplanationofourproject'sSystemArchitectureDesign:
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Intheprocessofdataacquisition,thedistancebetweentheADASVehicleandnearbycarsorobstaclesisdetermined usinganultrasonicsensor,alongsideestablishingascheduleforcontinuousremotesurveillance.Controllogicinvolvesthe creationofanalgorithmutilizingthevehicle'sspeedandreactiontimetoascertainasafedistance,definingthisdistanceand settingathresholdaccordingly.Speedanddirectionadjustmententailintegratingthemotorcontrolsystemwiththecontrol algorithmtodynamicallyalterthevehicle'sspeedordirection,ensuringitmaintainsasafetrailingdistancewhileprioritizing seamlesstransitionstopreventabruptshifts.
Implementobstacledetectionusinginfraredsensorstoidentifyobstructionsalongthevehicle'spath,providingreal-time informationontheirpresenceanddistance.Developanalgorithmforemergencybrakingtriggeredwhenanobstructionis detectedwithinapresetrange,consideringdecelerationpatternsforacontrolledstop.Integratethemotorcontrolsystemwith theemergencybrakingalgorithmtodisablemotoroperationsduringbrakingevents,withprotocolsforresumingregular operationspost-obstructionremoval.
Byamalgamatingdatafrombothinfraredandultrasonicsensors,acomprehensiveunderstandingoftheenvironmentis obtained, allowing for the establishment of standards for obstacle prioritization and classification. This data feeds into a decision-makingalgorithmwhichgeneratesanobstacleavoidancestrategyconsideringallsensorinputsanddynamically adjusts travel plans to navigate around barriers efficiently. Finally, connecting the motor control system to the obstacle avoidance algorithm enables real-time adjustments to direction and speed, ensuring effective obstacle avoidance duringnavigation.
4.4.
Positional data acquisition involves employing sensors to pinpoint the vehicle's location within the lane, while concurrentlyimplementingprocedurestoconsistentlymonitoritslateralposition.Intandem,aservomotorcontrolalgorithm isdevisedtodynamicallyadjustthesteeringmechanism,ensuringthevehiclemaintainsitsorientationatthecenterofthelane. This algorithm incorporates a proportional-integral-derivative (PID) control system to achieve precise and effective steeringadjustments.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Theimplementationofadvanceddriverassistancesystem(ADAS)featuresusingtheArduinoUnoboardyieldedpromising resultsinthesuccessfulintegrationofbasicfunctionalities,includingsafedistancemonitoring,obstacleavoidance,emergency braking,andlanekeepassist.TheArduinoUnoeffectivelycontrolledthegearmotorsviatheL293Dmotorshield,allowing precisemotioncontrolbasedonsensorinputs.Theultrasonicsensoraccuratelydetectedobstaclesinthecar'spath,triggering appropriate responses such as deceleration and steering adjustments to avoid collisions. Likewise, the infrared sensors providedreliablefeedbackformaintainingthecarwithindesignatedlanes,enhancingoverallnavigationstability.
However, challenges emerged when attempting to implement more complex ADAS features, particularly adaptive cruise control. The limitations of the Arduino Uno's computational power became evident, leading to system failures and the destruction of multiple Arduino Uno boards during coding attempts. This highlights the inherent constraints of using microcontrollerswithlimitedprocessingcapabilitiesforhandlingsophisticatedADASalgorithms.Asaresult,thediscussion turnstothenecessityoftransitioningtomorepowerfulplatforms,suchasRaspberryPi,toaccommodatethecomputational demandsofadvancedADASfunctionalities.
Overall, while the Arduino Uno proved suitable for integrating basic ADAS features into the small-scale car model, its limitations hindered the implementation of more complex functionalities. This underscores the importance of selecting microcontrollersbasedonthecomplexityofthedesiredADASfeatures,withconsiderationsforcomputationalpower,memory resources, and programming flexibility. The transition to Raspberry Pi represents a strategic decision to overcome these limitationsandpursuethedevelopmentofcomprehensiveADAScapabilitiesinminiaturevehicleapplications
Inconclusion,theprojectendeavourstoexplorethefeasibilityofimplementingadvanceddriverassistancesystem(ADAS) featuresinasmall-scalecarmodelusingtheArduinoUnoboard.WhilesuccessfulintegrationofbasicADASfunctionalitiessuch assafedistancemonitoring,obstacleavoidance,emergencybraking,andlanekeepassistwasachieved,limitationsbecame evidentwhenattemptingtoimplementmorecomplexfeatureslikeadaptivecruisecontrol.TheinabilityoftheArduinoUno boardtohandlethecomplexityofthecodingrequiredforadaptivecruisecontrolledtothedestructionofmultipleboards, necessitatingatransitiontoamorepowerfulmicrocontrollersuchastheRaspberryPi.
Despitethechallengesfaced,theprojectunderscoresthepotentialoftheArduinoUnoboardforeducationalandprototyping purposesinintegratingfundamentalADASfunctionalitiesintosmall-scalecarmodels.Additionally,theexperiencegainedfrom thisprojecthighlightstheimportanceofselectingtheappropriatemicrocontrollerbasedonthecomplexityofthedesiredADAS features.ThedecisiontoswitchtotheRaspberryPidemonstratestheadaptability andflexibilityrequiredinengineering
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
projectstoovercomelimitationsandpursueinnovativesolutions.Movingforward,furtherresearchanddevelopmentutilizing moreadvancedmicrocontrollersarewarrantedtoenhancethecapabilitiesofsmall-scalecarmodelsandcontributetothe advancementofADAStechnology.
Weextendourheartfeltgratitudetoallthosewhocontributedtotherealizationofthisresearchpaperonadvancedriver assistancesystems.
Firstandforemost,weexpressoursincereappreciationtotheparticipantsofourresearchstudies,includingstudents,faculty members,administrators,andITprofessionals,whoseinvaluableinsightsandfeedbackformedthefoundationofourwork. Theirwillingness tosharetheir experiencesand perspectiveswasinstrumental inshapingthedirectionandfocus ofour research.
We are deeply thankful to the authors of previous research studies, academic papers, reports, and case studies that we consultedduringthecourseofthisresearch.Theircontributionsprovideduswithvaluablecontext,insights,andinspiration, enrichingthedepthandbreadthofourunderstandingofthesubjectmatter.
Together,thecollectiveeffortsofallthosementionedabovehaveplayedanintegralroleinthedevelopmentandcompletionof thisresearchpaper.Wearetrulygratefulfortheircontributionsandproudtoacknowledgetheirimpactonourwork.
[1] Md.TanjilIslamKhan,AStudyonDriverlessCarTechnologiesandImplementationofaSensor-BasedSpeed-Controlled AutonomousVehicle,e-ISSN:2582-5208InternationalResearchJournalofModernizationinEngineeringTechnologyand Science.
[2] Mohammed,MS,Abduljabar,AM,Faisal,MM,Mahmmod,BM,Abdulhussain,SH,Khan,W,Liatsis,PandHussain,A(2023) Low-costautonomouscarlevel2:Designandimplementationforconventionalvehicles.ResultsinEngineering,17.ISSN 2590-1230Low-costautonomouscarlevel2:Designandimplementationforconventionalvehicles.
[3] AlfaRossi,NadimAhmed,SultanusSalehin,TashfiqueHasnineChoudhury,GolamSarowar,Real-timeLanedetectionand MotionPlanninginRaspberryPiandArduinoforanAutonomousVehiclePrototype.
[4] MahmoudFathya,NadaAshraf,OmarIsmail,SarahFouada,Designandimplementationofself-drivingcar.
[5] MeenuGupta,RakeshKumar,SunainaDas,RohanSharma,Arduino-BasedReal-TimeObstacleDetectioninVehiclesUsing ProximitySensors.
[6] PepitaPerez,JoseEnriqueSimo,FranciscoBlanes,GinesBenetGilabert,UsingInfraredsensorsfordistancemeasurement inmobilerobots.
[7] AlisherShakirovichIdmailov,ZafarJo’rayev,Studyofarduinomicrocontrollerboard.
[8] https://www.sciencedirect.com/book/9780128037294/on-road-intelligent-vehicles