
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
Dayanand1 , Mrs.
Neha
Deshmukh2 ,
1Student,Master of Computer Application, VTU CPGS, Kalaburagi, Karnataka, India
2Assistant Professor, Master of Computer Application, VTU CPGS, Kalaburagi, Karnataka, India ***
Abstract - Humans drive in a comprehensive style, which requires, namely, comprehension dynamic road incidents and the explanation of them. Including these abilities in independent vehicles can therefore Approach decision-making and situational awareness in a mortal position manner. In order to achieve this, we present the road event mindfulness dataset (ROAD) for autonomous driving, which is the first of its type to our knowledge. ROAD's purpose is to evaluate an independent vehicle’s capability to descry road events, defined as triumvirates composed by an active agent, the action( s) Both the performance and the scene locations match. The initial set of videos in ROAD are taken from the Oxford Robot Car Dataset, and each road event's position in the image plane is indicated by bounding boxes. We standardcolorful discovery tasks, proposing as a introduce a new incremental algorithm called 3D-RetinaNet for online road event mindfulness. We also report the performance on the ROAD tasks of Slow fast and YOLOv5 sensors, as well as that of the winners of the ICCV2021 ROAD challenge, which punctuate the challenges faced by situation mindfulness in independent driving. ROAD is designed to allow scholars to probe instigative tasks similar as complex (road) exertion discovery, unborn event expectation and continual literacy
Key Words: Machine Perception, Traffic Events,Deep Learning,Sensor Fusion, Data Annotation,Real-time Processing,TrafficSignalRecognition
INrecenttimes,independentdriving(orrobot-supported driving) has surfaced as a fast- expanding field of exploration. The drive towards fully autonomous cars pushedmanylargecompanies,similarasGoogle,Toyotaand Ford,todeveloptheirownconceptionofrobot-auto.While tone-drivingbusesareextensivelyconsideredtobeamajor development and testing ground for the real- world operationofartificialintelligence,majorreasonsforconcern remainintermsofsafety,ethics,cost,andtrustability.From a safety viewpoint, in particular, smart buses need to robustly interpret the teste of the humans( motorists, climbersorcyclists)theypartaketheterrainwith,inorder tomanagewiththeiropinions.Situationmindfulnessandthe capabilitytounderstandthetesteofotherroaddruggiesare therefore essential to the secure implementation of independentvehicles(AVs).
Therearmostgenerationofrobot–busesisequippedwith arangeofdifferentdetectors(i.e.,rayrangefinders,radar, cameras,GPS)to give data on what'spassing on the road.
Theinformationsouprootedisalsofusedtosuggesthowthe vehicleshouldmove.Someauthors,still,maintainthatvision is a sufficient sense for AVs to navigate their terrain, supported by humans capability to do just so. Without enlistingourselvesassympathizersoftheultimatepointof view,inthispaperweconsidertheenvironmentofvisiongrounded independent driving from videotape sequences capturedbyinstalledinaninternetstreamingformatonthe car
Whilesensornetworksareroutinelytrainedtogreaseobject andactorrecognitioninroadscenes,thissimplyallowsthe vehicleto see what'saroundit.Thegospelofthisworkis that robust tone- driving capabilities bear a deeper, more mortal- suchlike understanding of dynamic road surroundings (and of the evolving teste of other road druggiesovertime)intheformofsemanticallymeaningful generalities, as a stepping gravestone for intention vaticinationandautomateddecisiontimber.Oneadvantage ofthisapproachisthatitallowstheindependentvehicleto concentrate on a much lower quantum of applicable information.whenlearninghowtomakeitsopinions,ina wayarguablyclosertohowdecisiontimbertakesplacein humans.
On the contrary side of the diapason lies end- to- end underpinningliteracy.There,thetesteofamortalmotorist in response to road situations is used to train, in an reproduction learning setting an independent auto to respondinamoremortal-suchlikemannertoroadscripts. This,still,requiresanastonishingquantumofdatafroma myriadofroadsituations.
Fortracedrivingonly afairlysimpletaskwhencomparedto megacitydriving,Friedmanetal.inhadtouseawholelineof vehicles to collect 45 million frames. maybe more importantly,inthisapproachthenetworklearnsamapping fromthescenetocontrolinputs,withouttryingtomodelthe significantdatatakingplaceinthesceneorthelogicofthe agentstherein.Asbandiedinnumerousauthorshavelately stressedtheinsufficiencyofmodelswhichdirectlycollude compliances to conduct, specifically in the tone- driving busesscript.
[1] Gurmit Singh have put forth a model for machine learning built on The Road Event Awareness Dataset for autonomousdriving.BecausetheROADdatasetwascreated specifically with self-driving cars in mind, it contains
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
activitiestakenbyallroadagentsinagivenplace,inaddition to people, to create road events (REs). In addition to contributing a new road event Awareness Dataset for AutonomousDriving(ROAD)asastandardforthisfieldof study,thisworkofferedanapproachforsituationawareness in autonomous driving based on the idea of road events. convolution-based neural networks are the suggested algorithm.
[2] Junyao Guo have put up a driving safety model. An overviewofthevariables,measurements,anddatasetsused in the machine learning-based driveability assessment of autonomousdriving.Thisusesapubliclyavailabledataset. We have examined recent driveabilityresearcheffortsfor autonomous driving in this study. We would like to draw attention to the fact that while the main focus of this research is supervised learning, which necessitates large amounts of data, further developments in artificial intelligence(AI) are requiredinordertolearnfromsmall amountsofdataandgeneralisetounchartedterritory.The AIenginethatdrivesautonomousvehiclesshouldideallybe Capableoftransferringmodelsthathavealreadydeveloped on source data to any target domain. Even a CNN can be outperformedbyaCNN-basedhandpositionestimatorthat wassolelytrainedonartificialdataproducedbyGAN
[3] EkimyurtsevER onASurveyofAutonomousDriving: Common Practices and Emerging Technologies, put out a model.Theuseofconvolutionalneuralnetworkswasmade in conjunction with machine learning algorithms. In this surveyonautonomousdrivingsystems,weidentifiedasome of the significant advancements additionally existing systems.Inthissurveyonautonomousdrivingsystems,we identified a some of the significant advancements additionally existing systems. The development of new technology and scientific fields are both necessary for the creationofautomateddrivingsystems.
[4] RogerWoodmanhaveputupamodelforthemachine learning-based review of graph-based hazardous event detection techniques for autonomous driving systems. Hazard-focuseddatasetsarethetypeofdatausedhere.In ordertoreliablyandearlyidentifysuchevents,processing largeamountsofheterogeneous,ambiguous,andincomplete scene information is a difficulty. might look at a hybrid approach that blends the rigour of mathematics and uncertaintypropagationofBNswiththelearningcapacityof GNNstoproduceaprobabilisticforecast.
TheproblemstatementaddressedbytheROADdatasetand the associated exploration is to enhance the situational mindfulnessofindependentvehicles(AVs)incomplexroad surroundings.Thisinvolvesthedevelopmentofmodelsand systemsthatcanunderstandandprognosticatetheconduct of colorful road agents (similar as climbers, cyclists, and othervehicles)withintheenvironmentoftheirterrainand
theconductthey'reperforming.ThethingistoproduceAVs thatcanmakeinformedopinionsinreal-time,analogousto mortalmotorists,byrecyclingamultitudeofdynamicscripts ontheroads.TheROADdatasetisdesignedtosupportthis bidbyfurnishingplushlyannotateddatathatcapturesthe complexityofroadevents,enablingthemodeltrainingand assessmentthatcandescryandanticipatetheseevents.
To improve the situational awareness of autonomous vehicles, the aim is to create a dataset that captures the complexity of various road events. We propose a new frameworkforsituationalmindfulnessandperceptionthat extendsbeyondconventionalobjectdetectionandsemantic segmentation. This framework adopts a multi-label approach, encompassing agents, behaviors, and locations. The ROAD dataset will be established as a benchmark for semantic situational awareness in autonomous driving, enablingtheevaluationofdiversetasksrelatedtosituational mindfulness. This work lays the groundwork for further research in autonomous driving and computer vision, particularlyinunderstandingdynamicroadenvironments. The dataset will also validate several key tasks related to situationalawareness,suchasdetectingagents,recognizing actions, identifying locations, understanding agent-action relationships,discoveringroadevents,andsegmentingthe temporalbehaviorofautonomousvehicles.Additionally,the datasetisdesignedtobeextensible,supportingtheinclusion of future tasks like event prediction, decision-making models, and machine understanding of intent. Ultimately, thisdatasetwillcontributetotheautonomousdrivingand computervisioncommunitiesbyofferingarich,annotated resourcethatcansupportvariousresearcheffortsinthese fields.
1) Dataset Creation:
Putting special emphasis on the frontal camera view, 22 videosfromtheOxfordRobotCarDatasetareassembledto createtheROADdataset.Itpresentsanassortmentofroad scenariosinarangeofweatherscenariostotestautonomous carsystems.
2) Annotation Process:
Using a multi-label technique, the dataset is thoroughly annotatedwithtagsforlocations,actions,andagents.This results in 122,000 annotated video frames, 1.7 million uniquelabels,and560,000detectionboundingboxes.
3) Baseline Establishment:
Foronlineaction/agent/eventdetection,abaselinemodel called3D-RetinaNetissuggested.Totrackdetectionsover time, this model combines an online tube construction methodwithasingle-stageobjectdetector.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
4) Benchmarking:
To evaluate the efficacy of 3D-RetinaNet in agent recognition,itsperformanceistestedtothatofothermodels, suchasSlowfastandYOLOv5.
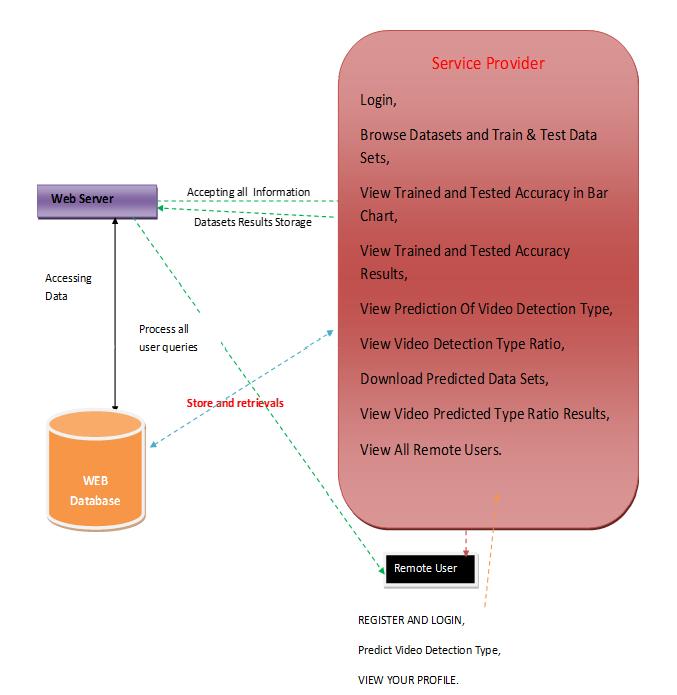
6. SYSTEM DESIGN
7. ALGORITHM USED
The goal of a discriminant machine learning technique in classificationproblemsistoidentifyadiscriminantfunction that can accurately predict labels for newly acquired instances based on an independent and identically distributed (iid) training dataset. A discriminant classificationfunctiontakesadatapointxandassignsitto oneofthevariousclassesthatarepartoftheclassification task,incontrasttogenerativemachinelearningtechniques that call for calculations of conditional probability distributions. Discriminant approaches are less effective than generative approaches, which are mostly employed whenpredictionentailsthedetectionofoutliers.However, they need less training data and processing resources, particularlywhendealingwithamultidimensionalfeature space and when only posterior probabilities are required. Learning a classifier is comparable to figuring out the equation for a multidimensional surface froma geometric standpoint.SVM is a discriminant technique that, unlike genetic algorithms (GAs) or perceptrons, which are both commonlyusedforclassificationinmachinelearning,always
returns the same optimal hyperplane valuesinceitsolves theconvexoptimizationissueanalytically.Theinitialization and termination criteria have a significant impact on the solutions for perceptrons. While the perceptron and GA classifiermodelsaredifferenteverytimetrainingisstarted, trainingyieldsuniquelydefinedSVMmodelparametersfora giventrainingsetforacertainkernelthatconvertsthedata fromtheinputspacetothefeaturespace.Onlyminimizing training error is the goal of GAs and perceptrons, which meansthatseveralhyperplaneswillsatisfythiscriterion.
Gradientboostingisamachinelearningapproachcommonly used for both regression and classification tasks, among others. It creates a predictive model by combining the outputs of multiple weak learners, which are usually decision trees. When decision trees are used as the base learners, the technique is referred to as gradient-boosted trees,whichoftendeliverbetterperformancethanrandom forests.Inthisapproach,themodelisbuiltsequentially,with eachnewtreeaimedatcorrectingtheerrorsoftheprevious one. Unlike other boosting methods, gradient boosting is flexible as it allows the optimization of any differentiable loss function, making it adaptable to a wide range of problems.
8.
Through a thorough evaluation methodology, the effectiveness of the research carried out utilizing the suggested dataset for testing road event awareness in autonomous driving is evaluated. In order to improve realism, the dataset includes a wide range of road events, includingdynamicscenarioslikepedestriancrossings,traffic signal changes, and construction zones, all of which are recordedinavarietyofweatherandlightingcircumstances. Reliablemodeltrainingandevaluationaremadepossibleby thecarefulannotationofeveryevent,whichguaranteeshigh accuracy.Weuseavarietyofassessmentmetrics,including as accuracy, recall, and F1 score, along with confusion matricestogiveacomprehensiveperformanceoverview,in ordertovalidatemodel performance.Theeffectiveness of thedatasetisdemonstratedbybaselinecomparisonswith current benchmarks, and cross-validation methods strengthen the validity of our conclusions by reducing overfitting.Strongreal-timeprocessingskillsareexhibited by the chosen algorithms, which are crucial for the implementation of autonomous systems.We also highlight theimportanceofourresultsforthesafetyandusabilityof autonomous driving technology, demonstrating how heightened awareness of road events can result in fewer false positives and negatives. In addition to improving machine perception in autonomous cars, this research establishestheframeworkforupcomingdatasetexpansions and practical testing, which will eventually improve the integration of these systems into everyday driving environments.
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net

In addition to contributing a new Road event Awareness DatasetforAutonomousDriving(ROAD)asa standardfor this field of study, this work offered an approach for situation awareness in autonomous driving predicated on thenotionthatroadevents.Thedatasetcontainsdistinctive featuresinthefieldandwasconstructedusingmoviesthat wereincludedintheOxfordRobotCardataset.Roadagents (including the AV), their locations, and the action(s) they takeareallnamedinitsrichannotation,whichadherestoa multi-label philosophy. Road events may be created by combininglabelsofthethreesorts.22filmstotaling122K annotatedvideoframesareincludedinthecollection,which results in 560K detection bounding boxes linked to 1.7M distinctlabels.
Baseline testing were conducted on ROAD using a new 3DRetinaNet architecture, a Slow fast backbone, and a YOLOv5 model (foragentidentification).. Frame-MAPand video-MAP analyses were conducted. Our first findings demonstrate the difficulty of ROAD, with the Slow fast baseline obtaining a video-MAP at poor localization precision (20% overlap) on the three primary tasks that composebetween20%and30%.Ontheotherhand,YOLOv5 managedtogetnoticeablysuperiorperformance.TheROAD @ ICCV 2021 challenge results corroborated these conclusions, which underline the importance of a more thorough investigation while drawing attention to the importantdifficultiesuniquetosituationawarenessinroad situations.
[1] The design uniform random field for identifying and segmentingpartiallyoccludedobjectswasdevelopedby J.WinnandJ.ShottoninProc.IEEEComput.Soc.Conf. Comput.Vis.PatternRecognit.,2006,pp.37–44
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 11 | Nov 2024 www.irjet.net p-ISSN: 2395-0072
[2] K.Korosec"Toyotaisrelyingonthisstartuptoadvance itsplansforself-drivingcars,"[Online].Availablehere: https://fortune.com/2017/09/27/luminar/toyota-selfdriving-car/1050 Vol. 45, No. 1, January 2023, IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINEINTELLIGENCE
[3] Fordcampusvisionandlidardata set,G. Pandey, J.R. McBride,andR.M.Eustice,Int.J.Robot.Res.,vol.30,no. 13,pp.1543–1552,2011.
[4] M.E.A.Maurer,TheTechnical,Legal,andSocialAspects of Autonomous Driving. Springer, Berlin, Germany, 2016.
[5] "Intelligentvehicles,"A.Broggietal.,SpringerHandbook ofRobotics.Springer,Berlin,Germany,2016,pp.16271656.
[6] " Object modelling for tone- driving buses using 3D point pall data," in the Proceedings.. IEEE Intell. Veh. Symp.,2018,pp.409–414,S.Azam,F.Munir,A.Rafique, Y.Ko,A.M.Sheri,andM.Jeon.
[7] A. M. Lopez and Z. Fang, "Will the pedestrian cross?. Respondingviatwo-dimensionalpostureestimation,in IEEE Intell. Veh. Symp., 2018 Proceedings, pp. 1271–1276.
[8] "A reinforcement learning based approach for automated lane change manoeuvres," Paul P.Wang, C. Chan,andA.D.L.Fortelle,Proc.IEEEIntell.Veh.Symp., 2018,pp.1379–1384.
[9] "Continuousdecisionmakingforon-roadautonomous drivingunderuncertainandinteractiveenvironments," C.Chen,J..Tang,L.Xin,S.E.Li,andM.Tomizuka,Proc. IEEEIntell.Veh.Symp.,2018,pp.1651–1658.