
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
Sam
Selvaraj1 , Archisha Srivastava1 , Rajat Saboo1, Avani Bhuva2
1BTech Computer Science Student, NMIMS MPSTME, Mumbai
2Assistant Professor, Dept. of Computer Engineering, NMIMS MPSTME, Mumbai
Abstract - Roadsafety in India is a pressing concern due to the prevalence of narrow roads, unclear lane markings, and unrepaired potholes, which frequently lead to accidents and traffic congestion. This issue is further compounded by pedestrianssharingtheroads.Inresponsetothesechallenges, we introduce a Vehicle Lane Detection system that encompasses lane, pothole and pedestrian detection.
This paper presents a thorough investigation of the creation and application of a multipurpose vehicle assistance system intended to improve driver experience and road safety. Our system integrates advanced computer vision techniques for lanedetection,pedestrianrecognition,andpothole detection, culminatinginacohesivesolutionaimedatreal-timeanalysis of the road environment. The lane detection module utilizes Sobel filters and Canny edge detection, demonstrating robust performanceinaccurately delineatinglaneboundariesunder varying environmental conditions. Object detection capabilities are facilitated by the MobileNet SSD architecture pre-trained on the COCO dataset, enabling efficient identification of pedestrians and other potential hazards. Pothole detection is addressed through the integration of YOLOv7 pre-trained on the COCO dataset, offering high precision in detecting road surface irregularities. This paper also recommends the development of a live pothole database which can be used by roadway authorities for the efficient management and repair of roads. The proposed system is further validated through integration into consumer-grade hardware, showcasing its computational efficiency and practical feasibility for real-world deployment. Experimental results demonstrate the effectiveness and reliability of the system in enhancing driver awareness andsafety onthe road.
Key Words: Lane detection; Pedestrian detection; Pothole detection; Yolo; Mobilenet SSD; Deep learning; Canny edge detection
Lane detection plays a pivotal role in ensuring road safety,enhancingdrivingefficiency,andenablingself-driving technologies. This technology addresses the critical challenge of accurately identifying and tracking lane markings on roadways, providing essential guidance for vehiclestomaintainproperlanepositioning,makeinformed decisions,andavoidcollisions.
Owingtotheintricateandever-changingnatureofroad conditions,laneidentificationsystemsmustbestrongand dependable. Narrow roads, variable lighting conditions, adverse weather,andthepresenceofmultiplelanesoften
posechallengesforhumandriversandautomatedvehicles alike.Incongestedurbansettings,theaccurateidentification of lanes becomes even more critical, as vehicles must navigate through complex traffic scenarios, including intersections,lanemerges,andpedestriancrossings.
The foundation of our system lies in the robust lane detectionmodule,whichutilizesSobelfiltersandCannyedge detectionalgorithmstoaccuratelydelineatelaneboundaries in varying lighting and weather conditions. By extracting relevantfeaturesfromtheroadsurface,thismoduleserves asthecornerstoneforsubsequentanalyses,enablingprecise localization and tracking of the vehicle within its lane. Historically,lanedetectionpredominantlyreliedonclassical computer vision techniques. These methods utilized color andedge-basedfeaturestoidentifylanemarkings.However, theseapproachesfacedlimitationsincopingwithlow-light conditions,inclementweather,anddiverseroadsurfaces.
In addition to lane detection, our system incorporates advanced object detection capabilities facilitated by the MobileNetSSDarchitecturepre-trainedontheCOCOdataset. Thismoduleenablesthereal-timeidentificationandtracking of pedestrians, vehicles, and other objects of interest, allowing drivers to anticipate potential collision risks and navigatesafelythroughcongestedtrafficenvironments.
Furthermore,weaddressthecriticalissueofroadsurface maintenanceandsafetybyintegratingapotholedetection modulebasedontheYOLOv7architecturepre-trainedonthe COCO dataset. This module enables the automated identification and characterization of road surface irregularities, such as potholes and cracks, empowering driversandroadmaintenanceauthoritiestotakeproactive measurestoensureroadsafetyandinfrastructureintegrity.
Inessence,thisresearchcontributestotheadvancement of intelligent transportation systems by offering a comprehensive and robust solution for road environment analysis and hazard mitigation. By combining traditional image processing techniques with deep learning-based objectdetectionmodels,oursystemrepresentsasignificant steptowardssafer and more efficient road transportation systems.
Lane detection is a vital component of sophisticated driverassistancesystemsanddriverlessvehicles.Aliterature surveyonlanedetectiontechniquesrevealsadiverserange
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
of approaches. Classical methods, prevalent before 2010, often utilized color and edge-based features, but they struggled in challenging conditions like low lighting and adverseweather.
Inthelastdecade,deeplearningtechniqueshavegained prominence, with Convolutional Neural Networks (CNNs) beingthemostpopularchoice.Manystudieshavefocusedon end-to-end solutions, where CNNs directly predict lane markings' positions. Such approaches are effective but requirelarge,labeleddatasets.
Semi-supervisedandunsupervisedtechniqueshavealso beenexplored,reducingtheneedforextensivelabeleddata. Additionally,researchershaveaddressedrobustnessissues by incorporating temporal information and context, improvingperformanceincomplexdrivingscenarios.
Paper no.
Methodused Advantages Accuracy
[1] Hough Transform,CNN, GNN Compiled MudLanedataset forsuburbanroads 0.61(F1)
[2] Canny,Hough, CNN,Gabor Filter IntroducesLDWS; Alertsdriveron lanedeviation -
[3] RANSAC, Kalman,CNN, RNN,Spline, DBSCAN Integrated multiple algorithms -
[4] FCOS,ResNet, FPN,GloU Handlesdifferent scalesefficiently 94.16% (AP)
[5] GMM,MeanShift, Floodfilling, Yolov4,ORB Introducesnew vehicledataset; Road segmentation; Objecttracking withtrajectory analysis
(mAP)
However, the field continues to evolve, with ongoing researchintoreal-timeefficiency,robustnessunderdiverse conditions, and adaptability to various road types. The literature underscores the importance of combining traditionalcomputervisiontechniqueswithdeeplearning, leadingtomorereliableandversatilelanedetectionsystems.
Potholedetectionisadifficulttaskthathasreceivedalot ofattentionfromtheacademiccommunityinrecentyears. This is because potholes can cause severe damage to automobiles and infrastructure, as well as accidents. For pothole detection, several methods have been proposed, includingvisual,acoustic,andsensor-basedmethods.
Visualmethodsforpotholedetectiontypicallyinvolvethe useofimagesorvideostoidentifypotholes.Thesemethods are further subdivided into feature-based and learning-
based methods. To detect potholes, feature-based approachesrelyonhandcraftedelementssuchasedgeand texture features. Learning-based techniques, on the other hand,employdeeplearningmodelstolearndiscriminative featuresforpotholeidentification.
Acousticmethodsforpotholedetectionrelyonthesound emitted by vehicles when they drive over potholes. These methods are further subdivided into time-domain and frequency-domainmethods.Tofindpotholes,time-domain algorithms analyse the acoustic input in the time domain. Frequency-domainmethods,ontheotherhand,analyzethe acousticsignalinthefrequencydomaintoidentifypotholes.
Sensor-based methods for pothole detection rely on sensors,suchasaccelerometersandgyroscopes,tomeasure thevibrationandmovementofvehicles.Thesemethodscan be further classified into single-sensor and multi-sensor methods. Single-sensor methods use data from a single sensor to identify potholes. Multi-sensor methods, on the other hand, use data from multiple sensors to identify potholes.
Deep learning for pothole identification has been increasinglypopularinrecentyears.Deeplearningmodels havebeendemonstratedtoproducecutting-edgeresultson arangeofpotholedetectiondatasets.Deeplearningmodels, ontheotherhand,necessitatevastvolumesoftrainingdata, whichcanbedifficultandcostlytoobtain.
Table-2: PotholeDetectionPapers
Paper
[6]
[7]
[8]
YOLOfamilyand SSD-Mobilenetv2
SSD-TensorFlow, YOLOv3Darknet53, YOLOv4CSPDarknet53
Providesreal-time andlow-latency
Highaccuracy, precision,recall andmAPReduces costandtime
YOLOV3,SSD, FasterR-CNN, HOGwithSVM Fasterprocessing
[9]
Vision-based,3D reconstructionbased
YOLOv485.48%, YOLOv383.60% (mAP@0.25)
YOLOv481.82%-
YOLOv3-82%
Cost-effective, requiressmall storage,real-time dataprocessing; accuratefor measuringshape andvolumeof potholes -
Overall, the pothole detection sector is fast evolving. New strategiesandapproachesarealwaysbeingdeveloped.Asa result,considerablebreakthroughsinpotholeidentification technologiesareexpectedinthenextyears.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
Object identification is a fundamental computer vision problem that attempts to recognise and locate things in pictures and movies. It has a wide range of applications, including self-driving cars, robotics, surveillance, and medicalimaging.
Table-3: ObjectDetectionPapers
[10] Yolo,RetinaNet, RCNN,VGG
CompiledMudLane datasetfor suburbanroads Yolov497.31% (mAP)
[11] SSD UsesabetterSSD, muchmore efficient -
[12] YOLOv6v30, YOLOv6-N, YOLOv6-M/L Betteraccuracy 528%
[13] DETRvariants, DAB-DETR, DeformableDETR
[14]
R-FCN,MaskRCNN,SSD. Feature extraction:VGG, ResNet,ResNeXt
Outperforming previousmethods withfewermodel sizes 660%(AP)
Thesealgorithms canlearnbothlowlevelandhigh-level imagefeatures, whicharemore representativethan thehandcrafted features -
Traditionalobjectdetectionmethodstypicallyinvolvetwo stages:
1) Feature extraction: This stage extracts features from the inputimage,such asedges, corners,and colordistributions.
2) Classificationandlocalization:Thisstageusesthe extracted features to classify the objects in the imageandlocalizetheirboundingboxes.Inrecent years, deep learning has revolutionized object detection. Deep learning models can learn discriminativefeaturesforobjectdetectiondirectly from the data, without the need for handcrafted features.
Thefollowingaresomeofthemostprominentdeeplearning modelsforobjectdetection:
R-CNN:R-CNNisatwo-stagemodelthatusesregion proposalstolocalizeobjects.
FastR-CNN:FastR-CNNisafasterversionofR-CNN that uses a shared convolutional neural network (CNN) to extract features from the input image. Faster R-CNN: Faster R-CNN is an even faster version of R-CNN that uses a region proposal network(RPN)togenerateregionproposals.
YOLO: YOLO is a single-stage model that directly predictstheboundingboxesandclassprobabilities ofobjectsintheinputimage.
SSD:SSDisanothersingle-stagemodelthatpredicts bounding boxes and class probabilities of objects usingamulti-scalefeaturemap.
Arangeofobjectdetectionbenchmarkshaveseenstateof-the-artperformancefromdeeplearningmodels.However, theyneedalotoftrainingdataandmightbecomputationally expensive.
Overall,thefieldofobjectdetectionisrapidlyevolving. Newmethodsandapproachesarebeingdevelopedall the time.Asaresult,wecanexpecttoseesignificantadvancesin objectdetectiontechnologyinthecomingyears.
The application consists of an Integrated system that identifies potholes in real-time and provides the lane and pedestrian information to make decisions in self-driving mode.
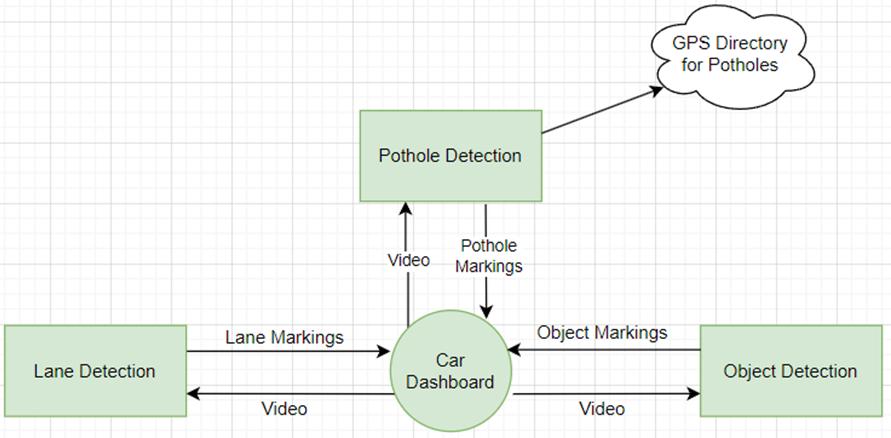
Figure 1: BlockDiagram
Pothole DetectionModule: Thismoduleusesavariety of sensors, such as cameras, LiDAR, and ultrasonic sensors, to detect potholes in real-time. The sensors collect data about the road surface, which is then processedbythepotholedetectionalgorithmtoidentify potholes.Thealgorithmmayuseavarietyoftechniques, suchasmachinelearninganddeeplearning,todetect potholes.
Lane Detection Module: Thismoduleusescamerasto detectlanesontheroad.Thecamerascollectimagesof theroad,whicharethenprocessedbythelanedetection algorithmtoidentifythelanes.Thealgorithmmayusea varietyoftechniques,suchasedgedetectionandHough transform,todetectlanes.
Pedestrian Detection Module: This module uses camerastodetectpedestriansontheroad.Thecameras collectimagesoftheroad,whicharethenprocessedby
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
the pedestrian detection algorithm to identify pedestrians. The algorithm may use a variety of techniques,suchasdeeplearningandmachinelearning, todetectpedestrians.
Integrated System: Thethreemodulesareintegrated togethertoprovideacomprehensivesystemforpothole detection, lane and pedestrian information for selfdriving. The pothole detection module identifies potholes in real-time, the lane detection module identifies lanes on the road, and the pedestrian detection module identifies pedestrians on the road. Thisinformationisthenusedbytheself-drivingsystem tomakedecisionsabouthowtonavigatetheroadsafely.
Hereisashortexampleofhowtheintegratedsystemmight beused:
1) Thepotholedetectionmoduleidentifiesapotholein theroadahead.
2) Thelanedetectionmoduleidentifiesthelanethat theself-drivingcariscurrentlyin.
3) The pedestrian detection module identifies pedestriansontheroad.
4) The self-driving system uses this information to decide how to navigate the pothole safely. For example, the self-driving system may slow down andswervearoundthepothole,oritmaycometoa stopifthereisoncomingtraffic.
Theintegratedsystemcanhelptomakeself-drivingcars saferbyprovidingthemwithreal-timeinformationabout theroadsurface,lanes,andpedestrians.
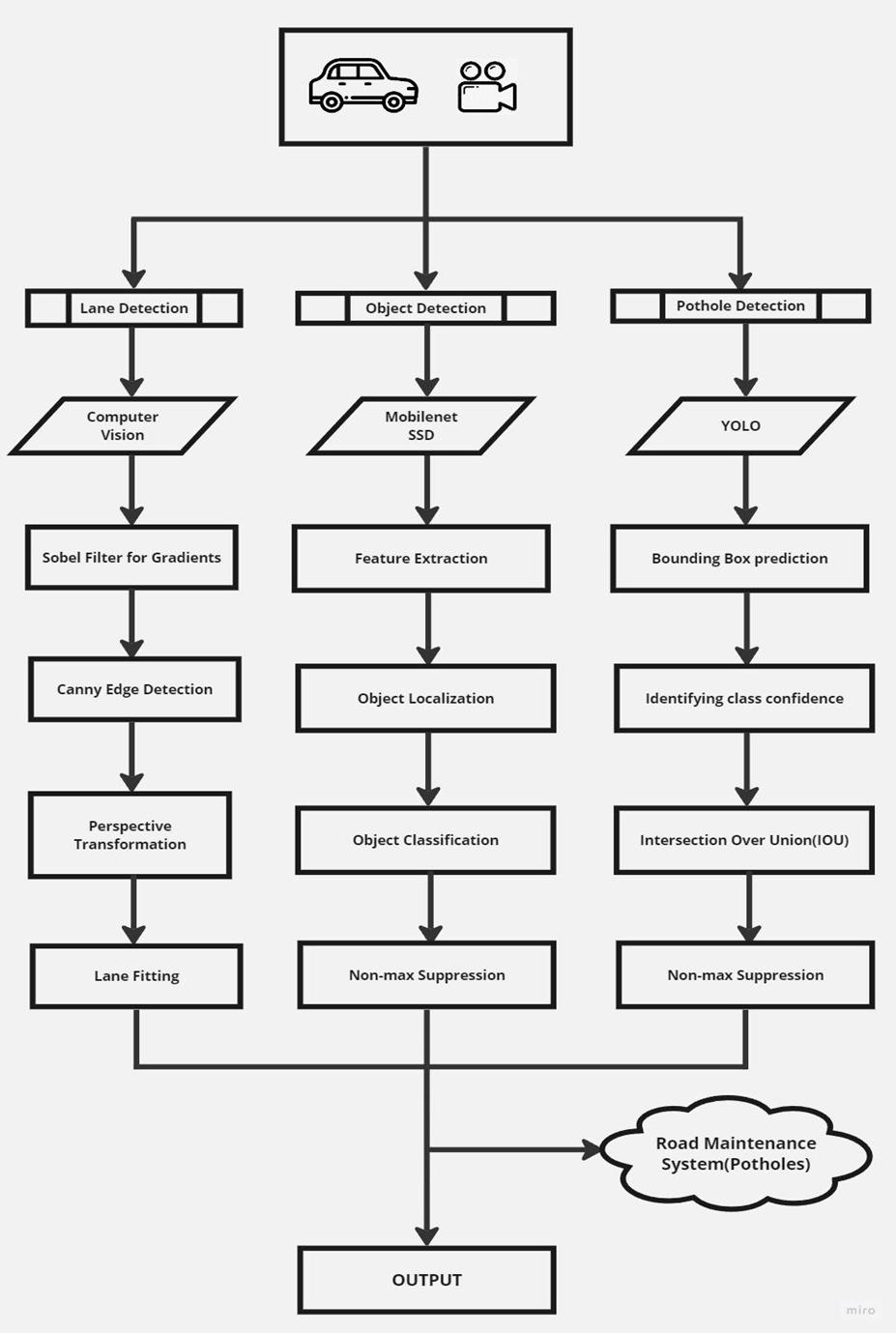
In this work, we introduce a Real-Time Road Lane Detection method that, through precise lane boundary detection,isessentialtoguaranteeingthesafenavigationof autonomous vehicles. Algorithms for lane recognition are essentialtoautonomouscarsystemsandAdvancedDriver AssistanceSystems(ADAS).Ourgoalinthisworkistoclarify thestepsthatmakeupthislanedetectionprocess:
Sobel Filter for Gradients: UtilizestheSobelfilter tocomputethegradientoftheimage,emphasizing regions with significant changes in intensity. It enhances the edges in the image by highlighting variationsinpixelintensities.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
Canny Edge Detection: Applies the Canny edge detection algorithm to further refine the edges detectedbytheSobelfilter.Focusesonidentifying the most prominent edges in the image while suppressingnoiseandsmallvariationsinintensity.
Perspective Transformation: Implements perspective transformation to obtain a bird's-eye viewoftheroad,aidinginbetterlanedetection.It warps the image to a top-down perspective, allowing for more accurate analysis of lane markings.
Lane Fitting: Utilizes the transformed image to extractlanemarkingsandfitpolynomialcurvesto represent the left and right lanes.It applies a lane detection algorithm to identify and track the positionoflanes,takingintoaccountthecurvesand theirrelationships.
Integration: Combines the outputs of Sobel filtering, Canny edge detection, perspective transformation, and lane fitting to form a comprehensivelanedetectionsystem.Itenablesthe system to robustly identify and track lanes under varyingroadandlightingconditions.
The outlined steps of this Real-Time Road Lane Detection algorithmcollectivelycontributetorobustandefficientlane detection, essential for enhancing the safety and performanceofautonomousvehiclesandAdvancedDriver AssistanceSystems(ADAS)
Convolutional neural network (CNN) designs in the MobileNetfamilyarelightweightandefficient,whichmakes them perfect for mobile and embedded applications. Numerous tasks, including as segmentation, object identification,andpictureclassification,canbeaccomplished withMobileNets.
MobileNetsarefrequentlyutilisedasthefoundationofa singleshotdetector(SSD)forobjectdetection.Onekindof objectdetectorthatcanidentifyitemsinapictureinasingle pass is an SSD. SSDs function by first employing a CNN backbonetoextractfeaturesfromtheimage.TheSSDthen makesuseofthesecharacteristicstoforecasttheclassesand boundingboxesoftheimage'sobjects.
MobileNet-based SSDs are particularly well-suited for mobileandembeddeddevicesbecausetheyareefficientand lightweight. For example, the MobileNet SSD v2 model is only267layersdeepandhas15millionparameters,making it much smaller and faster than other object detection models,suchasFasterR-CNN.
Step-by-step overview of how MobileNet is used for objectdetection:
Step 1 : Load the MobileNet model
The MobileNet model is a pre-trained model that wastrainedonalargedatasetofphotosandlabels. TensorFlowandPyTorcharetwoframeworksthat canbeusedtoloadtheMobileNetmodel.Oncethe model has been loaded, it is ready to be used for objectdetection.
Step 2 : Extract features from the input image
The MobileNet model retrieves features from the inputimage.Featuresarehigh-levelrepresentations oftheimagethatcanbeusedtoidentifythingsin theimage.TheMobileNetmodelcapturesfeatures from the input image by running it through a sequenceofconvolutionallayers.
Step 3 : Predict bounding boxes and classes using the SSD head
The SSD head is a network component of the MobileNetconcept.TheSSDheadpredictsasetof bounding boxes and classes for each feature map basedontheretrievedfeaturesfromtheMobileNet model. A bounding box is a rectangle in a picture that surrounds an object. A class is a sort of item thatiscontainedwithintheboundingbox.
Step 4 : Filter bounding boxes using nonmaximum suppression
Non-maximum suppression is a method for removing duplicate detections from a set of boundingboxes.Non-maximumsuppressionbegins by sorting the bounding boxes according to their confidence scores. It then iterates over the boundingboxes,removinganythatoverlapwitha boundingboxwithahigherconfidencescore.
Step 5 : Output the final bounding boxes and classes
The MobileNet-based SSD produces a list of boundingboxesandtheirrespectiveclassesasits final output. The discovered objects can then be visualisedbydrawingtheseboundingboxesonthe inputimage.
MobileNet is a powerful tool for object detection. It is efficient and lightweight, making it ideal for mobile and embeddeddevices.
The detection of potholes is a critical aspect of our integratedlaneandpotholedetectionsystem.Potholespose a significant safety hazard to road users and can lead to infrastructuredamage.Toaddressthisissue,weemployeda YOLOv7modelpre-trainedontheCOCOdataset,customized andfine-tunedforpotholedetection.Thissectiondetailsthe
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
methodologyadoptedforpotholedetection,encompassing dataacquisition,modeltraining,andpost-processingsteps.
1) Data Collection and Labeling: Data acquisition and labelingplayapivotalroleintrainingarobustpothole detection model. To create the dataset for pothole detection, one can collect images and videos of road surfaces, emphasizing regions with known potholes. These images and videos can then be manually annotated to label the pothole instances within them. Theannotationsincludedboundingboxesaroundeach detectedpotholeandassociatedclasslabels.
2) Data Pre-processing: Similar to the object detection component, data pre-processing is a vital step in preparing the input data for the YOLOv7 model. The followingpre-processingstepswereapplied:
Image Resizing: We resized the images to a consistent resolution, aligning them with the model's input size. This standardization ensured thatthemodelcouldprocessallimageseffectively.
Normalization: Imagepixelvalueswerenormalized to a common range, typically [0, 1] or [-1, 1], to facilitatemodelconvergence.
Data Augmentation: To supplement the dataset, data augmentation techniques such as random rotations,flips,andbrightnessmodificationswere used, boosting the model's capacity to manage differencesinroadconditionsandlighting.
Label Encoding: Labelsforpotholeswereencoded as numerical values, and the YOLOv7 model was configuredtopredictpotholelocationswithinthe imagesusingboundingboxes.
3) ModelTraining: Thepre-trainedYOLOv7modelserved asthefoundationforourpotholedetectingarchitecture. Wefine-tunedtheannotateddatasettotailorittoour specificjob.Thetrainingphaseentailedoptimisingthe model's weights in order to recognise potholes in the inputphotosaccurately.
LossFunction: Weemployedacustomlossfunction thatcombinedclassificationandlocalizationlosses, focusing on accurate pothole localization and classification.
Hyperparameter Tuning: We fine-tuned model hyperparameters, including batch size, learning rate and the number of training iterations, to achievethebestperformance.
4) Post-processing: Once the model was trained, postprocessing steps were implemented to refine the potholedetectionresults:
Non-maximum Suppression (NMS): To eliminate duplicate and overlapping detections, we applied NMS to retain the most confident pothole predictions.
Thresholding: Wesetaconfidencethresholdtofilter outlow-confidencepredictions,ensuringthatonly reliablepotholedetectionswereconsidered.
Geospatial Mapping: Pothole detections can be correlatedwithlocationdatatomaptheexactGPS coordinates of detected potholes, which will be instrumentalforroadmaintenancetrackingbythe relevantauthorities.
Ourpotholedetectionmethodologyprovidesarobustand efficientapproachforidentifyingpotholesinreal-worldroad conditions, enabling road authorities to take proactive measuresformaintenanceandensuringroadsafety.
Inourpursuitofcreatingacomprehensiveandefficient integratedsystemforroadmonitoringandmaintenance,the successful fusion of lane detection, object detection, and pothole detection is pivotal. This section elucidates the strategyemployedforthisintegrationandunderscoresthe significance of object tracking in elevating the system's performance.
To establish an integrated system, we strategically combined the outputs of the three components lane detection, object detection, and pothole detection. The followingintegrationstrategyoutlineshowtheinformation fromthesecomponentsisharmonized:
1) Parallel Processing: Each component operates independently in parallel. Lane detection, object detection, and pothole detection occur simultaneously,optimizingreal-timeperformance.
2) Object Localization: Object detection provides valuable insights into the presence of various objectsontheroad,includingvehicles,pedestrians, and traffic signs. These object locations are integrated with lane detection to enhance understandingoftheroadenvironment.
3) Pothole Detection and Geospatial Mapping: Potholedetectionscanbedirectlycorrelatedwith geospatial data. The GPS coordinates of detected potholescanberegisteredandmapped,providing road maintenance authorities with precise informationonpotholelocations.
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
5.1 Lane Detection

Figure 3: LaneDetection
For the lane detection component, we employed Canny edge detection followed by Hough line transformation to identify lane markings. Our approach yielded impressive results,accuratelydetectinglanesundervaryinglightingand roadconditions.Thelanedetectionalgorithmshowcaseda robust performance, ensuring that the vehicle remains withinthedesignatedlanes.Thisiscrucialforthesafetyand precision of autonomous vehicles and advanced driverassistancesystems.

Figure 4: ObjectDetection
Object detection using MobileNet SSD proved to be an integralcomponentofoursystem,successfullyrecognizing pedestrians,obstacles,andvariousobjects.
Table 4: ObjectDetectionAccuracy
MobileNet SSD is a fast and lightweight object detection model that is well-suited for mobile devices and other embeddedsystems.ItisbasedontheSingleShotDetector (SSD) architecture, but uses the MobileNet convolutional neural network (CNN) as its backbone. This makes MobileNet SSD more efficient and less computationally expensive than other object detection models, while still maintaininggoodaccuracy.
TheYOLOv7modelwasemployedforpotholedetection,and the results were highly promising. The model exhibited a remarkableabilitytoidentifypotholesinreal-time.
By alerting drivers or automated systems to road imperfections promptly, this feature holds significant potential for enhancing road safety and reducing maintenancecosts.

Detection
Table 5: PotholeDetectionAccuracy
Accuracy: On various object detection benchmarks, includingCOCOandKITTI,YOLOv7hasreachedstate-of-theartaccuracy.Thisshowsthatitcandetectpotholesinarange ofreal-worldscenarios.
Speed:BecauseYOLOv7isasingle-stageobjectdetector,it candetectthingsinanimageinasinglepass.Asaresult,itis much faster than two-stage object detectors like Faster RCNNandMaskR-CNN.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
Robustness:BecauseYOLOv7istrainedonavastdataset of photos, it is highly resistant to fluctuations in lighting, posture,andocclusion.Thisiscriticalforpotholedetection becausepotholescanemergeinavarietyofsituations.
Overall System Performance: The integration of these components into a single system resulted in a cohesive solution capable of comprehensive road monitoring. Realtime execution was achieved on a moderately configured laptop, showcasing the system's efficiency and real-world feasibility.
Accuracy and Speed: The accuracy and real-time processingcapabilitiesofYOLOv7andMobileNetSSDwere crucial aspects of our project's success. These models efficiently detected potholes, objects, and pedestrians, providingtimelyinformationfordecision-making.
Insummary,ourintegratedsystemdemonstratedimpressive capabilitiesinlanedetection,potholedetection,andobject recognition.Thesefunctionalitiesareintegralforenhancing road safety and driver-assistance systems. While there is always space for improvement, the findings of this project demonstrate the possibility of merging modern computer vision techniques and deep learning models to handle difficultreal-worldtransportationandroadsafetyconcerns.
A lane detection system with integrated pothole and object detection presents a significant leap forward in the realm of road safety and transportation technology. Our project has explored the diverse methods and approaches usedineachofthesecrucialcomponents,sheddinglighton thechallengesandopportunitiestheypresent.
Lane detection, a cornerstone of advanced driver assistance systems and autonomous vehicles, has evolved from classical techniques to deep learning methods. Its importance in ensuring vehicle safety and assisting autonomous navigation cannot be overstated. We realized thatdeep-learningmethodsarestillcomputationallyheavyto be run on a consumer device, hence traditional methods involvingimageprocessingarepreferred.
Thedetectionofpotholes,apervasiveroadhazard,has traditionally relied on visual, acoustic, and sensor-based approaches. We've observed the growing interest in deep learning for pothole detection, leading to state-of-the-art results. While deep learning has shown promise, it does require substantial training data, which poses a challenge thatresearchersareactivelyaddressing.
Object detection, fundamental to a safer and more efficient road environment, also follows a trajectory from traditional two-stage methods to deep learning models. Thesemodelshavethepotentialtorevolutionizeroadsafety
and have achieved state-of-the-art results in numerous benchmarks.
In conclusion, our project underscores the importance of combiningtraditionalcomputervisiontechniqueswithdeep learninginthedevelopmentofcomprehensiveandreliable lane detection systems. These systems offer immense potentialforenhancingroadsafety,supportingautonomous vehicles,andcontributingtosmartcityinitiatives.Asthefield continuestoevolve,wehopetoseemorerobusttechnology whichcapturesthenuancesandchaosofeverydaytrafficin ordertomakesafedecisionsasanautonomousvehicle.
The integrated lane detection, object detection, and pothole detection system presented in this research open avenues for several exciting future developments and applications.Thefollowingoutlinespotentialdirectionsfor furtherexplorationandimprovement:
The geotagging of potholes represents an indispensablenextstepinoursystem'sevolution.By implementing a geotagging mechanism, we can create a dynamic and real-time map of road conditions, especially crucial in the context of countrieslikeIndiawithextensiveroadnetworks. Authorities and travelers could access this information, facilitating informed route planning andtimelyroadmaintenance.Geotaggingcanalso enabletheprioritizationofroadrepaireffortsbased ontheseverityandlocationofpotholes.
As self-driving vehicle technology continues to advance,ourintegratedsystemholdsthepotential to become an integral component of autonomous vehicles. The real-time and comprehensive data providedbyoursystemcanenhancethedecisionmaking processes of self-driving vehicles. This integrationcanfacilitatesafernavigation,optimized route planning, and timely response to road anomalies,ultimatelycontributingtotherealization offullyautonomoustransportationsystems.
Expanding the system's capabilities to include advanced traffic management and road safety featuresisanotherexcitingavenue.Integratingrealtimetrafficdata,weatherconditions,andpredictive analytics can enable authorities to proactively managetrafficflow,reducecongestion,andenhance roadsafetythroughtimelyinterventions.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue: 08 | Aug 2024 www.irjet.net p-ISSN: 2395-0072
4) Collaboration with Authorities and Civic Bodies
To ensure the effective implementation of our integrated system, close collaboration with local authorities and civic bodies is essential. A cooperative approach will not only enable the deploymentofoursystemonalargerscalebutalso foster data-sharing initiatives that benefit the communityandinfrastructuredevelopment.
[1] J.Li,”LaneDetectionwithDeepLearning:Methodsand Datasets,”InformationTechnologyandControl,vol.52, no.2,pp.297-308,2023.
[2] P.YelwandeandA.Jahagirdar,”VehicleLaneDetection andTrackingSystemforCarSafety,”AsianJournalFor Convergence In Technology (AJCT), ISSN 2350-1146, 2019.
[3] Y.Xingetal.,”AdvancesinVision-BasedLaneDetection: Algorithms,Integration,Assessment,andPerspectives on ACP-Based Parallel Vi-sion,” IEEE/CAA Journal of AutomaticaSinica,vol.5,no.3,pp.645-661,2018.
[4] R.LiandY.Zu,”ResearchonPedestrianDetectionBased on the Multi-Scale and Feature-Enhancement Model,” Information,vol.14,no.2,p.123,2023
[5] H. Song, H. Liang, H. Li et al., ”Vision-based vehicle detection and counting system using deep learning in highway scenes,” Eur. Transp. Res. Rev, vol. 11, p. 51, 2019.
[6] M. H. Asad, S. Khaliq, M. H. Yousaf, M. O. Ullah, and A. Ahmad,”PotholeDetectionUsingDeepLearning:ARealTimeandAI-on-the-EdgePerspective,”AdvancesinCivil Engineering,vol.2022,ArticleID9221211,2022.
[7] A.A.Shaghouri,R.Alkhati,andS.Berjaoui,”Real-Time PotholeDetectionUsingDeepLearning,”arXiv,preprint arXiv:2107.06356,2021.
[8] P.Ping,X.Yang,andZ.Gao,”ADeepLearningApproach forStreetPotholeDetection,”inIEEESixthInternational Conference on Big Data Computing Service and Applications (BigDataService), Oxford, UK, 2020, pp. 198-204.
[9] Y.-M.Kim,Y.-G.Kim,S.-Y.Son,S.-Y.Lim,B.-Y.Choi,and D.-H. Choi, ”Review of Recent Automated PotholeDetectionMethods,”AppliedSciences,vol.12,no.11,p. 5320,2022.
[10]T.Diwan,A.G.,andJ.V.Tembhurne,”Objectdetection using YOLO: challenges, architectural successors, datasetsandapplications,”MultimedToolsAppl,vol.82, pp.9243-9275,2023.
[11]M.Sornalakshmi,S.M.,E.R.G.,A.V.,S.K.B.,andD.M., ”Real Time Object Detection Using Deep Learning,” in 2nd International Conference on Vision Towards Emerging Trends in Communication and Networking Technologies(ViTECoN),Vellore,India,2023,pp.1-6.
[12]C.Lietal.,”YOLOv6v3.0:AFull-ScaleReloading,”arXiv, preprintarXiv:2307.12008,2023.
[13]Z.Zong,G.Song,andY.Liu,”DETRswithCollaborative Hybrid Assignments Training,” in IEEE/CVF International Conferenceon Com-puterVision(ICCV), preprintarXiv:2211.12860,2023.
[14]B. Mahaur, N. Singh, and K. K. Mishra, ”Road object detection:acomparativestudyofdeeplearning-based algorithms,” Multimed Tools Appl, vol. 81, pp. 1424714282,2022.
[15]D.-H.Heo,J.-Y.Choi,S.-B.Kim,T.-O.Tak,andS.-P.Zhang, ”Image-Based Pothole Detection Using Multi-Scale FeatureNetworkandRiskAssessment,”Electronics,vol. 12,no.4,p.826,2023.