
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072

International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072
Rasker Rushikesh Arunr1 , Narawade Krushna Suresh2 , Kolhe Yash Somnath 3, Rohokale Gaurav Rohidas4 , Prof. Mr. Satpute A.S.5
1 student of Dept. Electronics and telecommunication Engineering, Samarth Polytechnic, Belhe
2 student of Dept. Electronics and telecommunication Engineering, Samarth Polytechnic, Belhe
3 students of Dept. Electronics and telecommunication Engineering, Samarth Polytechnic, Belhe
4HOD OF Dept. Electronics and telecommunication Engineering, Samarth Polytechnic, Belhe
Abstract - Marine pollutionandnavigationalhazardspose significant risks to ecosystems andmaritimesafety.Thispaper presents a Marine Pollution Control and Emergency Alert System designed to monitor environmental conditions, detect obstacles such as icebergs, and mitigate surface pollution in real time. The system is powered by an adaptable microcontroller that coordinates multiple sensors, including an ultrasonic sensor used for obstacle detection. Alivecamera feed enables real-time visual monitoring, while a communication module sends automated alerts regarding environmental hazards, such as storms and emergencyrescue situations, to nearby ships or central monitoring stations. The system also features a location-tracking capability to provide real-time updates on its position.
The ship operates with a motorized system equipped with a debris collection mechanism for removing surface waste. All functionalities, including obstacle detection, ship navigation, and real-time data visualization, can be controlled remotely through a web interface using wireless connectivity. This scalable and cost-effectivesolutionaddressesmarinepollution while ensuring safer navigationthroughproactivemonitoring and alerting.
Key Words: Marine Pollution, Remote Controlling, Controller, Sensor, Detector
1.INTRODUCTION
Marine environments are increasingly threatened by pollution and hazardous obstacles, which disrupt ecosystems, endanger marine life, and pose significant challenges to maritime operations. The accumulation of waste on the ocean'ssurface,coupled with the dangersof floatingdebrisandicebergs,hascreatedanurgentneedfor innovative solutions that address these issues efficiently. Traditional methods for controlling marine pollution and ensuring navigation safety often rely on manual interventions, which are time-consuming, resourceintensive,andreactiveinnature.Thereisagrowingdemand for automated systems that can detect and respond to environmentalthreatsinrealtime.
ThispaperintroducesanovelMarinePollutionControland EmergencyAlertSystem,designedtotacklethesechallenges
by integrating advanced sensing and communication technologies.Thesystemleveragesanultrasonicsensorfor detecting obstacles, such as icebergs, to ensure safe navigationinharshmaritimeenvironments.Additionally,it is equipped with a motorized mechanism capable of collectingfloatingdebris,therebyreducingsurfacepollution.
A real-time camera feed allows for visual monitoring, and automated alerts are transmitted via wireless communicationtonearbyshipsorcoastalstationsincaseof emergency situations, such as environmental hazards or rescueoperations.Thesystem’slocation-trackingcapability ensuresconstantawarenessofitsposition,enhancingboth operationalefficiencyandsafety.
Bycombiningenvironmentalmonitoring,obstacledetection, and automated alerting in a single platform, this system offersa scalableandcost-effectivesolutionforaddressing marinepollutionandmaritimehazards.Thedesignishighly adaptable, enabling future upgrades to incorporate additional functionalities or respond to evolving environmentalchallenges.Thefollowingsectionswilldetail the system’s architecture, component integration, and performanceinreal-worldscenarios.
In response to the growing threats posed by marine pollution and navigational hazards, we propose a novel solutionthatcombinesautonomoushazarddetectionwith real-timepollutioncontrol.TheSmartMarinePatrolsystem is designed to operate autonomously in marine environments,continuouslymonitoringforpotentialthreats such as icebergs, floating debris, and hazardous environmental conditions. Utilizing a suite of advanced sensors, including ultrasonic technology for obstacle detection,thesystemcanaccuratelyidentifynearbythreats andtakepreventiveaction.
The patrol system also includes a fully integrated debris collectionmechanismdesignedtocaptureandstorefloating waste,suchasplasticandotherpollutants,ensuringcleaner waters.Thesystem’sgarbagecollectionfunctionisactivated whenitdetectssurfacepollution,autonomouslynavigating towardsthewasteandremovingitfromthewater.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072
Whatsetsthissystemapartisitsdualfunctionality acting both as a hazard detection tool and an eco-friendly waste management solution. The Smart Marine Patrol leverages GSMcommunicationandGPStrackingtoprovidereal-time updates to nearby vessels and shore stations, ensuring timely alerts in case of potential dangers or critical environmental changes. The autonomous operation is supported by an intuitive web interface, allowing remote monitoringandcontrolfromanywhere,whileprovidinglive visualfeedbackfromthesystem’sonboardcamera.
Thisinnovationrepresentsasignificantleapinmarinesafety andenvironmentalconservation,offeringasustainableand scalablesolutiontotheglobalchallengeofmarinepollution andnavigationalhazards.Bycombiningtheabilitytodetect hazards and remove pollutants in a single platform, the SmartMarinePatrolensuresbothcleaneroceansandsafer maritime navigation, all while operating with minimal humanintervention.
The Eco-Guardian system is a groundbreaking solution designedtoaddresstwoofthemostpressingchallengesin marine environments: pollution control and navigational safety. This innovative system operates autonomously, continuously patrolling the water's surface to detect both environmental hazards and pollutants in real time, while activelycollectingdebristoensurecleaner,saferoceans.
At the core of the Eco-Guardian is its advanced obstacle detection system, which utilizes ultrasonic sensors to identify potential navigational threats such as floating debris, icebergs, and other hazards. Unlike traditional marine navigation systems, which often rely on human intervention or less responsive technologies, the EcoGuardian can autonomously detect and avoid these obstacles.Bycalculatingthedistancetonearbyobjectsand adjusting its route in real time, the system ensures uninterrupted operation andreduces the risk of maritime accidents.
In addition to its hazard detection capabilities, the EcoGuardian is equipped with a debris collection mechanism designedtocaptureandstorefloatingwaste.Asitpatrolsthe water, the system actively searches for visible pollutants such as plastic waste, oil slicks, and other contaminants. Oncepollutantsaredetected,thesystemnavigatestoward the debris and activates its collection mechanism, safely removing waste from the water's surface. This process is fullyautomated,allowingforcontinuousoperationwithout theneedforhumanintervention,significantlyreducingthe burdenofmanualcleanupoperations.
TheEco-Guardiansystemalsoincludessensorsthatmonitor environmental conditions such as temperature, humidity, and other atmospheric variables. In the event of extreme weatherconditions(e.g.,stormsorheavyrain),thesystem immediately triggers automated alerts, which are sent to surroundingshipsorcoastalmonitoringstationsviaaGSM module. The system's GPS functionality allows for precise locationtracking,ensuringthatnearbyvesselsareawareof theexactpositionoftheEco-Guardianandanyhazardsor environmentalrisksitidentifies.
OneofthekeyfeaturesoftheEco-Guardianisitsreal-time datatransmissioncapabilities.Thesystemisequippedwith a live camera feed, allowing remote operators to visually monitor the marine environment. This data, along with sensorreadingsandnavigationinformation,istransmitted viaWi-Fitoaweb-basedcontrolinterface.Fromhere,users can remotely monitor the system’s operations, track its location, and even manually override the autonomous controlsifnecessary.
5.
Designedwithscalabilityinmind,theEco-Guardiancanbe deployed in a variety of marine environments, from small coastal areas to large open waters. The system's modular design allows for the integration of additional sensors or advanced features such as AI-based decision-making, enablingittoadapttofutureneeds.Poweredbyrenewable energy sources like solar panels, the Eco-Guardian is an environmentally friendly solution that aligns with global sustainabilityefforts.
In contrast to traditional systems that often react to environmental threats after they occur, the Eco-Guardian offersaproactiveapproach.Bydetectinghazardsearlyand automatically removing pollutants, it not only prevents potentialaccidentsbutalsomitigatestheimpactofpollution before it becomes a larger environmental crisis. This combination of smart navigation, pollution control, and proactive hazard detection represents a significant advancementinmarinetechnology.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072
2. Detailed Block Diagram Information
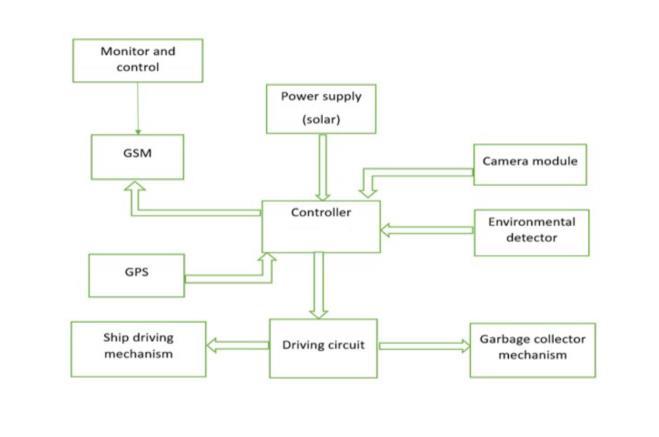
1.MonitorandControl
This is the central hub of the system. It monitors all incomingdatafromtheenvironmentalsensors,camera,and other modules, analyzing it in real time. The control mechanismenablesthesystemtoinitiatenecessaryactions autonomously or remotely, such as sending alerts or activatingthegarbagecollectionmechanism.
KeyFeature:ThesystemusesacombinationofGPSandGSM forlivemonitoring,offeringremotesupervisionandcontrol capabilitiesfromanylocationwithnetworkcoverage.
2.GSM(GlobalSystemforMobileCommunications)
GSM is used for sending real-time alerts to surrounding ships or onshore control centers. It acts as the communicationbackboneforalertingauthoritiesincaseof pollutiondetection,environmentalhazards,orrescueneeds.
Unique Aspect: The GSM module also serves a dual purpose enablingcommunicationnotonlyforemergencies butalsoforongoingsystemstatusupdates,allowingremote real-timemanagementofmarineresources.
3.GPS(GlobalPositioningSystem)
TheGPSmoduletrackstheexactlocationofthesystemat alltimes.Incaseofemergencies,thisdatahelpspinpointthe system's position and sends precise coordinates to alert nearbyvesselsoronshorepersonnel.
Innovative Feature: GPS integration allows for live mapping of the system's movement, providing real-time geofencing.Ifthesystemdetectsenvironmentalchangesor obstacles,itadjustsitspathautonomouslytoavoidhazards likeicebergs.
The central processing unit (CPU) of the system, responsible for interpreting sensor data and executing
commands.Thecontrollerisprogrammedtomanageinputs fromallconnectedsensors(e.g.,theenvironmentaldetector, cameramodule)andcoordinatetheoutputresponses,such as triggering alerts or activating the garbage collection mechanism.
Novel Functionality: This system employs an intelligent control strategy where the controller learns from environmentaldatapatterns.Forexample,ifaspecificarea shows repeated pollution events, the system adjusts its patrolanddatacollectionfrequencyforthatzone.
Theentiresystemispoweredbysolarenergy,ensuringan eco-friendlyandself-sustainingoperation.Theuseofsolar power is crucial for autonomous systems that operate in remotemarineareaswhereregularaccesstopowersources isnotfeasible.
Unique Value: The system employs a solar power optimization technique, wherein it prioritizes critical functionslikeenvironmentaldetectionandcommunication duringlow-powerstates,ensuringuninterruptedoperation eveninlowsunlightconditions.
The camera module is used for visual data acquisition, providingalivefeedforremotemonitoring.Itplaysacrucial role in detecting physical debris and obstacles (such as icebergs)inadditiontothegarbagecollectionmechanism.
DistinctCapability:Thecameramoduleisintegratedwith image processing software, allowing it to differentiate between various objects, such as distinguishing between organicwasteanddangerousdebris,likefloatingice.
Theenvironmentaldetectorgathersdatarelatedtomarine pollution and hazardous environmental changes. This includesoilleaks,chemicalspills,ordrasticchangesinwater quality.
New Feature: This system is equipped with multidimensional sensing capabilities, including ultrasonic sensors to detect icebergs and obstacles, and pollutantspecific sensors for detecting different types of waste and toxicsubstances.
Thedrivingcircuitcontrolsthemovementoftheshipor device through the water. This involves maneuvering the system based on inputs from GPS and environmental detectors.
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072
UniqueMechanism:Thisdrivingcircuitisprogrammedfor autonomousnavigation.Itcanchangeitspathdynamicallyif itdetectsobstacleslikeicebergsorhighlevelsofpollutionin specificareas,ensuringasmoothandefficientpatrolroute.
Thesystemusesashipdrivingmechanismtopropeland navigatethroughthewater.Itiscontrolledbasedoninput from the driving circuit, making the system mobile and allowingittoreachtargetedareasforpollutioncontrol.
NewConcept:Theshipdrivingmechanismincorporatesan adaptivespeedcontrolsystemthatadjustsitsspeedbased onenvironmentalconditions,suchasslowingdownwhen detectingobstacles(icebergs)orincreasingspeedtoavoid hazardouszones.
Thegarbagecollectormechanismisaphysicalcomponent responsibleforcollectingfloatingdebrisandpollutantsfrom the water surface. It can be remotely activated and controlled.
InnovativeFeature:Unliketraditionalgarbagecollectors, thismechanismcanadaptitscollectionapproachbasedon the type of waste detected. For example, it adjusts its collection method when encountering large debris versus smallerparticles,optimizingefficiency.
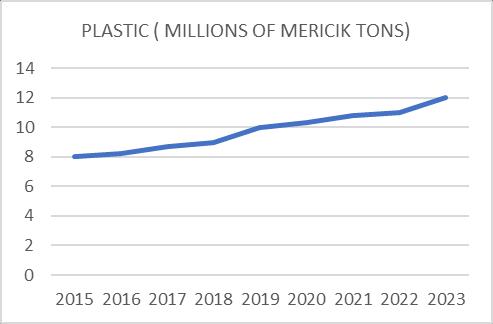
Thechartshowsaconsistentriseinplasticwastegeneration from2015to2023,increasingfromabout9milliontonsto approximately12milliontons.Anotablespikebetween2021 and2023indicatesacceleratedwasteproduction,potentially linkedtopost-pandemicindustrialactivities.Thenear-linear trendhighlightsthegrowingchallengeofmanagingplastic pollution. Urgent measures such as improved recycling techniquesandregulatoryinterventionsareneededtocurb thisenvironmentalissue.
Inconclusion,theMarinePollutionControlandEmergency Alert system embodies a forward-thinking solution to the pressingchallengesposedbymarinepollutionandmaritime safety.Byleveragingcutting-edgetechnologiessuchasGSM communication,environmentalsensors,andreal-timealert mechanisms,thissystemeffectivelybridgesthegapbetween immediate response needs and long-term environmental stewardship.
The system’s ability to detect and monitor pollutants in marine environments ensures timely intervention, significantly reducing the potential impact on marine ecosystems. Furthermore, its integrated communication platformfacilitatesswiftcoordinationamongnearbyvessels, enhancing the effectiveness of rescue operations and environmental protectioneffortsduringemergencies.The proactive alerts for adverse weather conditions, such as heavy rainfall, serve to prepare maritime operators and communities,minimizingrisksandpromotingsafetyonthe water.
Thisprojectnotonlyaddressestheurgentneedforpollution controlbutalsohighlightstheimportanceofcollaboration amongstakeholdersinthemaritimeindustry.Themodular and adaptable design of the system allows for future enhancementsandtheincorporationofnewtechnologies, ensuring that it remains relevant in an ever-evolving landscapeofmaritimechallenges.
As we move forward, the successful deployment of this system could catalyze a broader movement toward innovativesolutionsformarineconservation.Byfosteringa culture of responsibility and awareness in maritime operations,wecanworkcollectivelytoprotectouroceans, preserve biodiversity, and create a sustainable future for generationstocome.
We wouldliketo expressoursinceregratitudeto Satpute Sir, our esteemed guide, for his unwavering support, insightful guidance, and continuous encouragement throughoutthisproject.Hisexpertiseandvaluablefeedback were instrumental in bringing this project to a successful conclusion.
Wearealsodeeplythankful toourDirector,Dr.GhuleC.V whose indirect leadership has been a guiding force throughoutouracademicjourney.Hisvisionanddedication have played a significant role in creating an environment conducive to innovation and learning, which greatly benefitedthesuccessfulexecutionofthisproject.
Furthermore, we extend our heartfelt thanks to the professors and teaching staff of the Samarth Polytechnic Belhe, particularly those in the Electronics and
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 11 Issue:09 | Sep2024 www.irjet.net p-ISSN: 2395-0072
Telecommunication(E&TC)Department.Theirknowledge, guidance, and unwavering support provided us with the necessaryresourcesandassistancetocarryoutourresearch effectively.
Finally,wearegratefultoourpeersandcolleaguesfortheir invaluableassistanceandcollaborationduringthevarious phases of this project. Without their collective efforts and teamwork,thesuccessfulcompletionofthisworkwouldnot havebeenpossible.
[1] H.R.Somannavarand U.R. Umadevi, “Analysisof Marine Pollution Using IoT,” IOSR Journal of ComputerEngineering,vol.10,Oct.2023.
[2] M. Bhuvaneswari, S. Punitha, P. Sneka, and G. Sujithra, “IoT Automation for Emergency Environments,” IOSR Journal of Computer Engineering,vol.19,pp.44-47,Mar.-Apr.2017.
[3] P.N.F.M.Shamsuddin,M.A.Mansor,M.S.A.Hadib, N.Z.Abidin,andR.Ibrahim,“DevelopmentofWater Trash Collector,” Journal of Advanced Industrial ElectronicsResearchandApplications,vol.1,no.1, pp.01-05,2020.
[4] H.N.Saha,S.Auddy,A.Chatterjee,S.Pal,S.Pandey, R. Singh, R. Singh, P. Sharan, S. Banerjee, and D. Ghosh,“PollutionControlusingInternetofThings (IoT),” presented at 2017 IEEE International Conference,Kolkata,India,2017.
[5] I.A.Abdulrazak,H.Bierk,andL.A.Aday,“Humidity andTemperatureMonitoring,”InternationalJournal ofEngineering&Technology,vol.7,no,pp.1-6,Sep. 2018.DOI:10.14419/ijet.v7i4.23225.
[6] R. Amat, S. Mallick, and P. Suna, "Smart Accident DetectionandEmergencyNotificationSystemwith GPSandGSMIntegration,"InternationalJournalof RecentTechnologyandEngineering(IJRTE),vol.11, no.6,pp.97-101,Mar.2023.DOI:10.35940/ijrte. F7506.0311623.
[7] A.Arun,P.Nagasankar,P.Amirthalingam,E.Barath Kumar, G. Janarthanan, and A. S. Magesh, "Design andFabricationofGarbageCollectorontheBeach Using Solar Power," International Journal of Engineering&Technology,vol.7,no.3.34,pp.394396,2018.





Mr. Rasker Rushikesh Arun student of Dept. Electronics and Telecommunication Engineering, SamarthPolytechnic,Belhe
Mr. Narawade Krushna Suresh student of Dept. Electronics and Telecommunication Engineering, SamarthPolytechnic,Belhe
Mr. Kolhe Yash Somnath student of Dept. Electronics and Telecommunication Engineering, SamarthPolytechnic,Belhe
Mr. Rohokale Gaurav Rohidas student of Dept. Electronics and Telecommunication Engineering, SamarthPolytechnic,Belhe
Prof. Mr. Satpute A.S. (MEinEmbeddedsystemandVLSI) HOD OF Dept. Electronics and Telecommunication Engineering, SamarthPolytechnic,Belhe