ブロードエーカーシティ
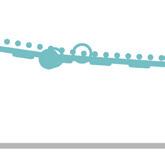
ブロード・エーカー・シティはフランク・ロイド・ライトが1932年に”The Disappearing City”において発表をした農村部における独立した低密度な都市計 画である。
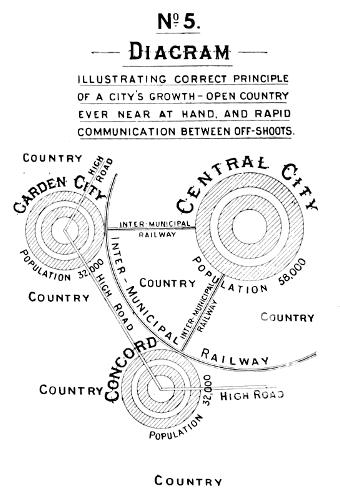
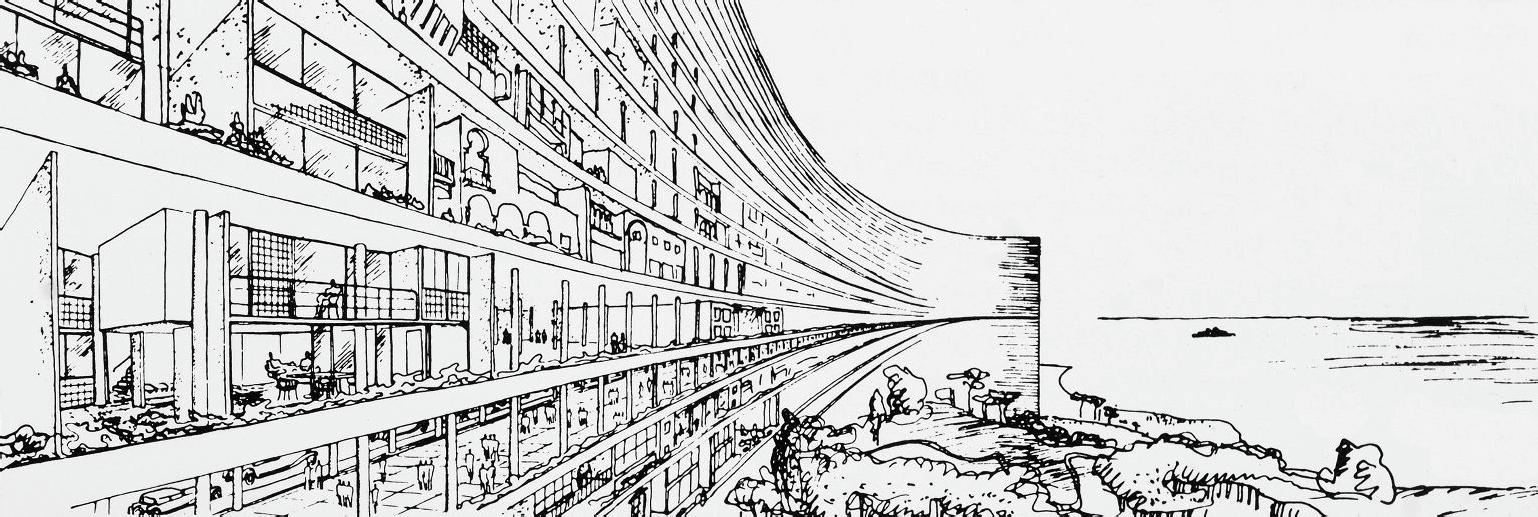
この計画では高速道路によって周縁の都市と接続された独立した都市が構想され ており、2560エーカーに約5000人の住民が1400の住居に暮らす計画が策定され ていた 36 。また住民は、それぞれが最低1エーカーの土地を無償で利用することが 可能であった。このスペースを活かして住宅に面した土地に対して、庭や自給自足 のための家庭菜園を行うことなどが促されていた 37 。 また一部には15階建てのマ ンションがこの街に分散するように計画されていた。そしてそれぞれの住民は仕事 場まで歩いていけるような距離感で設計がされていた。 この農村部における新しい都市計画を提案した背景にあったのが、ライトの高層 建築による高密度な非人間的な都市に対する批判であった 38 。 彼は集約型の都市 は交通とコミュニケーションが制限された、都市基盤の上に成立した過去の産物で あると考えていた 39 。一方でこのような現実とは乖離した提案であると考えられた ことから、19世紀的ユートピア思想と見なされ批判されたこともあった 40

24
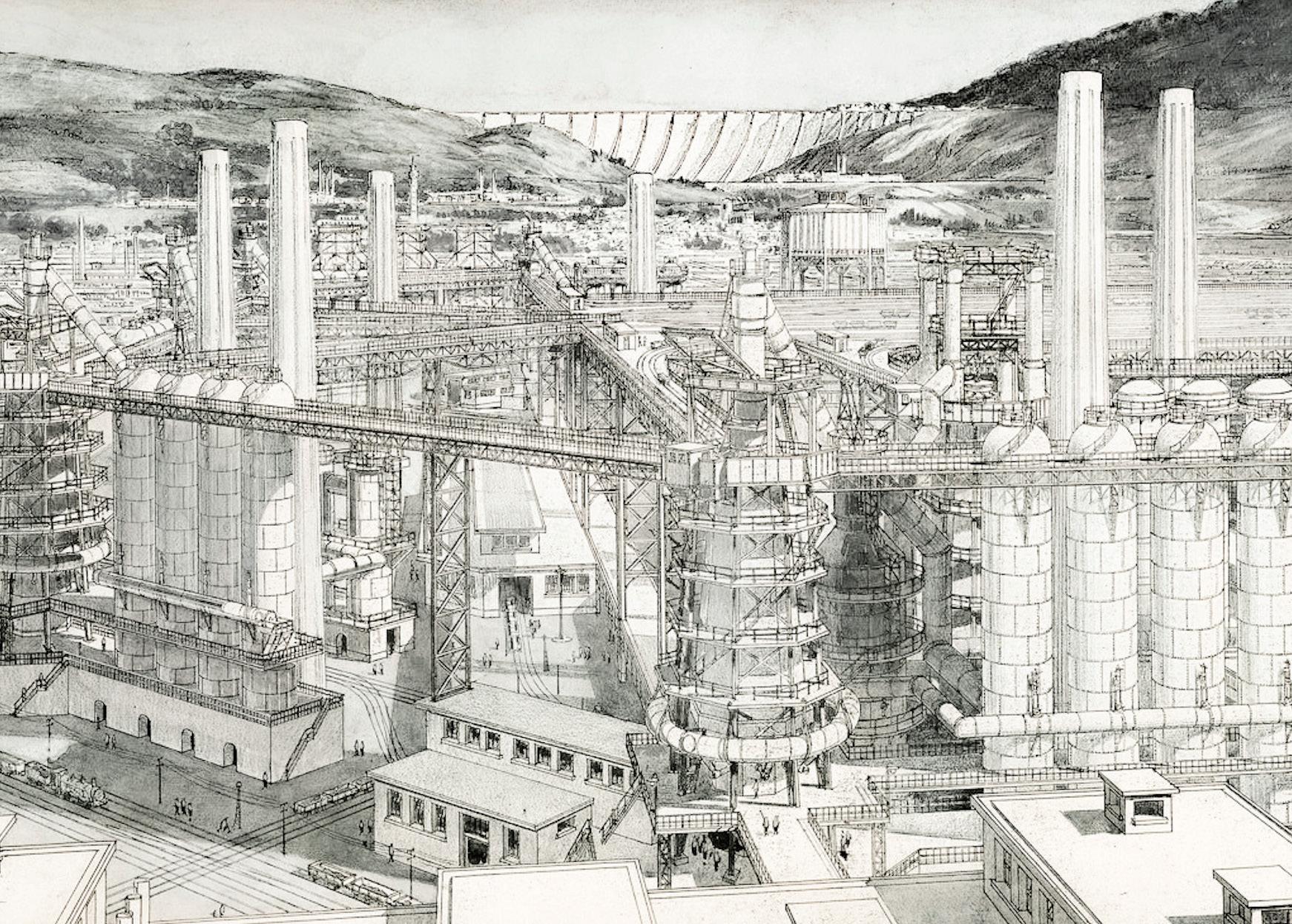
図17 典型的なブロードエーカーの風景 2.2.5
第二章 これまでの移動と建築の関係 フランク・ロイド・ライト 1932年 アメリカ
。 またこのような低密度な農村部に対して都市構想を行うことができた要因の一つ として、自動車の存在がある。ライトはアメリカにおいて既に普及が始まっていた この自動車を活用することにより、脱都市化を目指した農村地における新たな都市 の開発を志していた。また、少なくとも1台の車をそれぞれの家族で保有すること で、地域間の格差をなくし、集約型の都市ではなく良質な住環境の分散型都市の開 発が可能になるとも考えていた 41 。 ライトはこのような分散型の都市はスプロール化とは異なり、「まずは分散化、
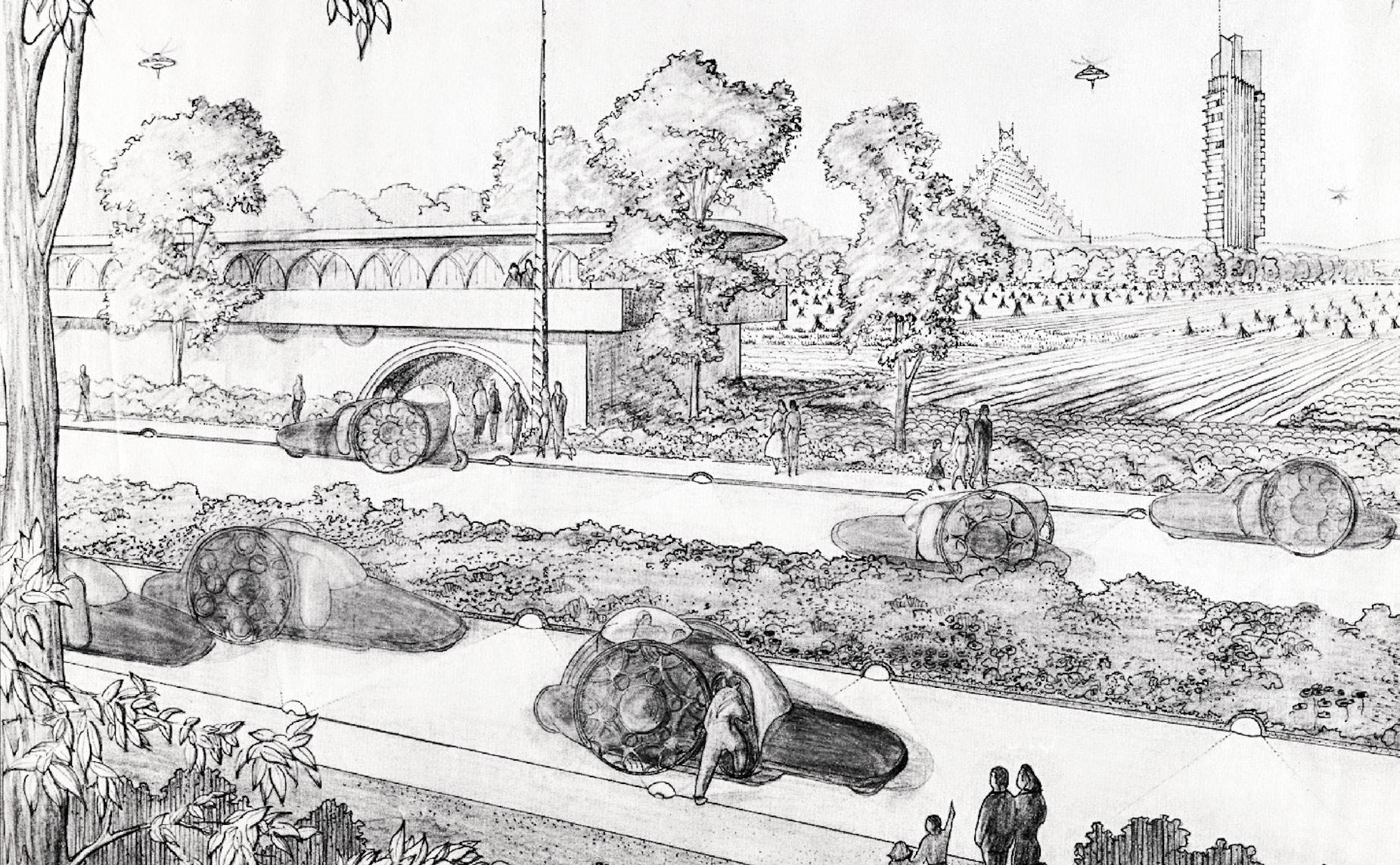
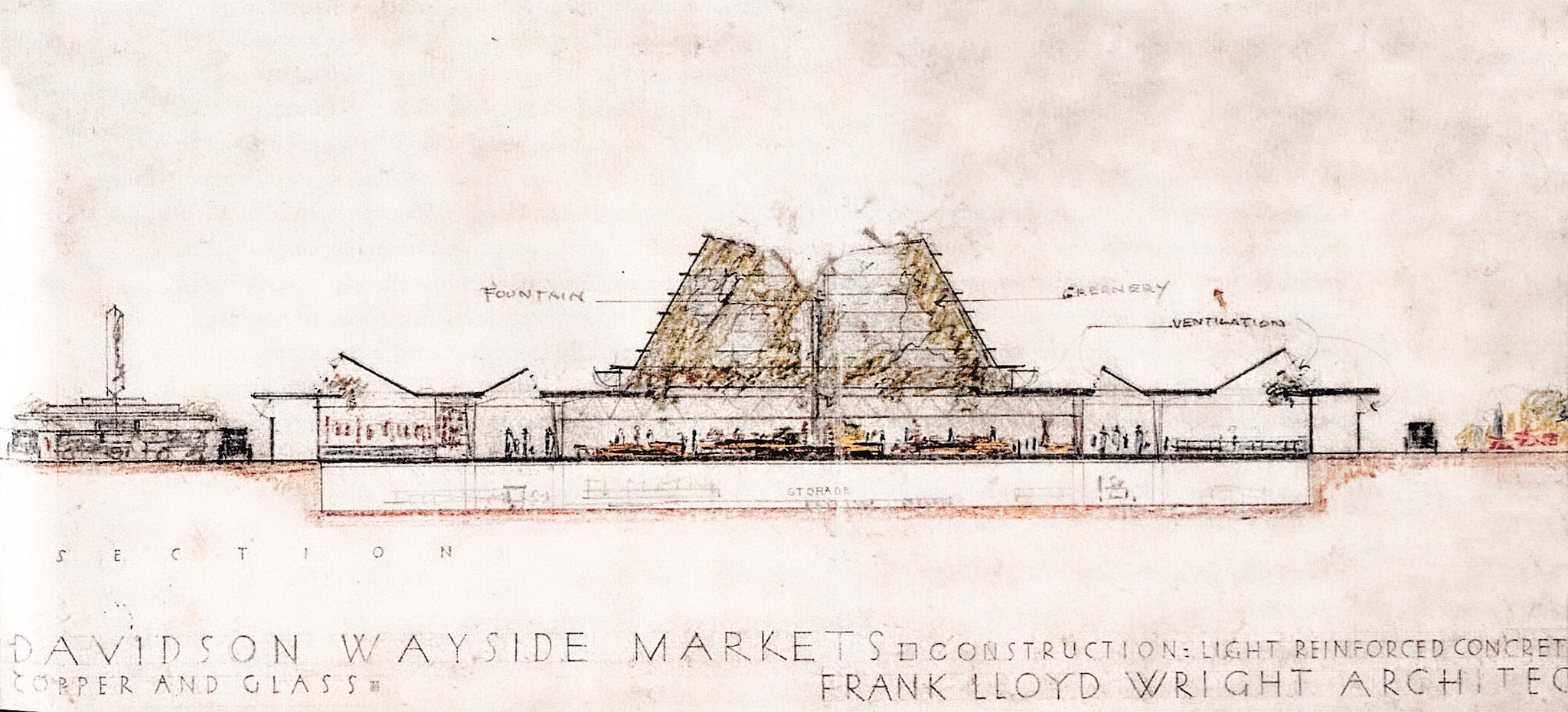
25 図19 シビック・センターの様子 図18 ロードサイドマーケットの様子 そして計画された再統合 42 」として評している。具体的な提案の中においても、こ の概念が高速道路のデザインとして示されていると水上は論じている 43 。ブロード エーカー・シティではガソリンスタンドやモーテル、道路沿いのマーケットが強調 されており、このような施設が都市からの分散を促す施設であると考えている。ま た将来的にはガソリンスタンドが分配センターに、マーケットは文化センターにな るとされており、将来的にこれらが地域を「統合」する焦点になるとしている。こ れらに加えて計画では、官公庁、裁判所、事務所、銀行等の地方への「分散化」と 小規模化が提案されている。一方でNelsonはこのような小さなスケールの街であ
ることから、日常サービス機能の一部は補うことが難しいと指摘している 44 。結果 的に、周辺の都市部のエリアに対して、このようなサービス機能は依存する必要性 が唱えている。
ノーマン・ベル・ゲデス 1940年 アメリカ
フューチャーラマは前述の自動車黎明期の時代に対する都市計画とは異なり、自 動車導入による利点と欠点を理解した上での自動車全盛期に向けた計画であると筆 者は考える。
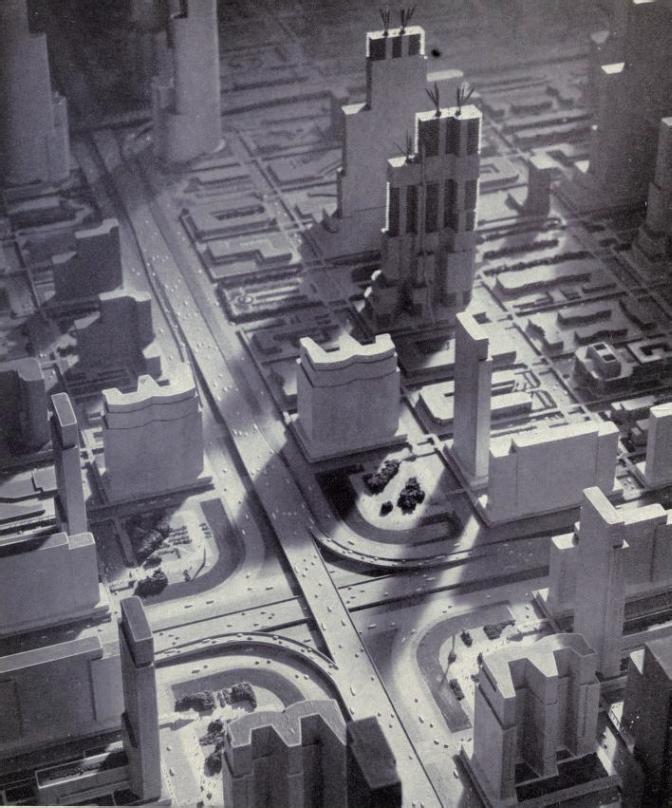
自動車の普及が進み、新たな弊害が生じ始めた。ゲデスは平均時速30km、そし て交通渋滞によってニューヨークだけで1日100万ドルに及ぶ経済損失、さらに はアメリカ国内で年間3万人を超える死者数を出すなどを例に取りながら、自動車 のもつ本来の性能を出しきれていないとした 45 。ゲデスはこれらの改善方法として、 1940年のフューチャーラマにおいて1960年の都市を描いた。
26
第二章 これまでの移動と建築の関係
2.2.6
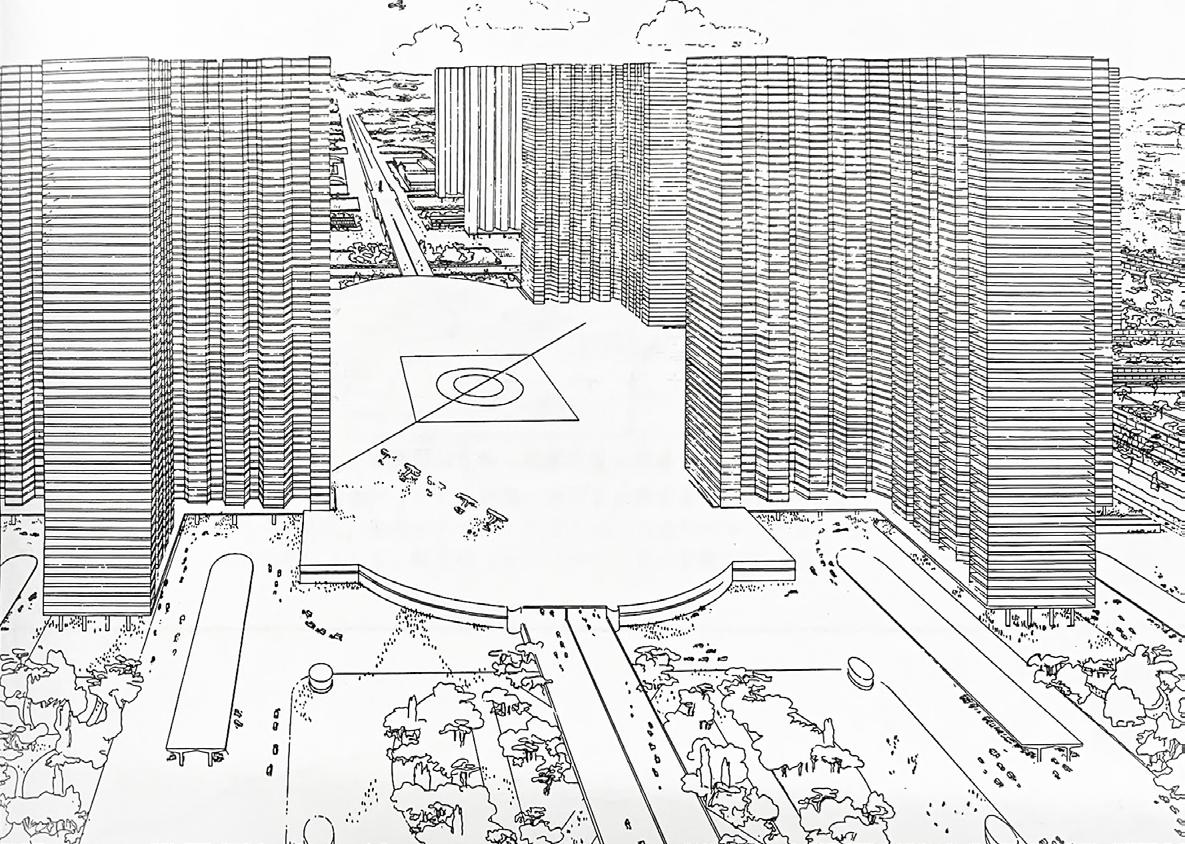
フューチャーラマ 図20 都市の俯瞰図
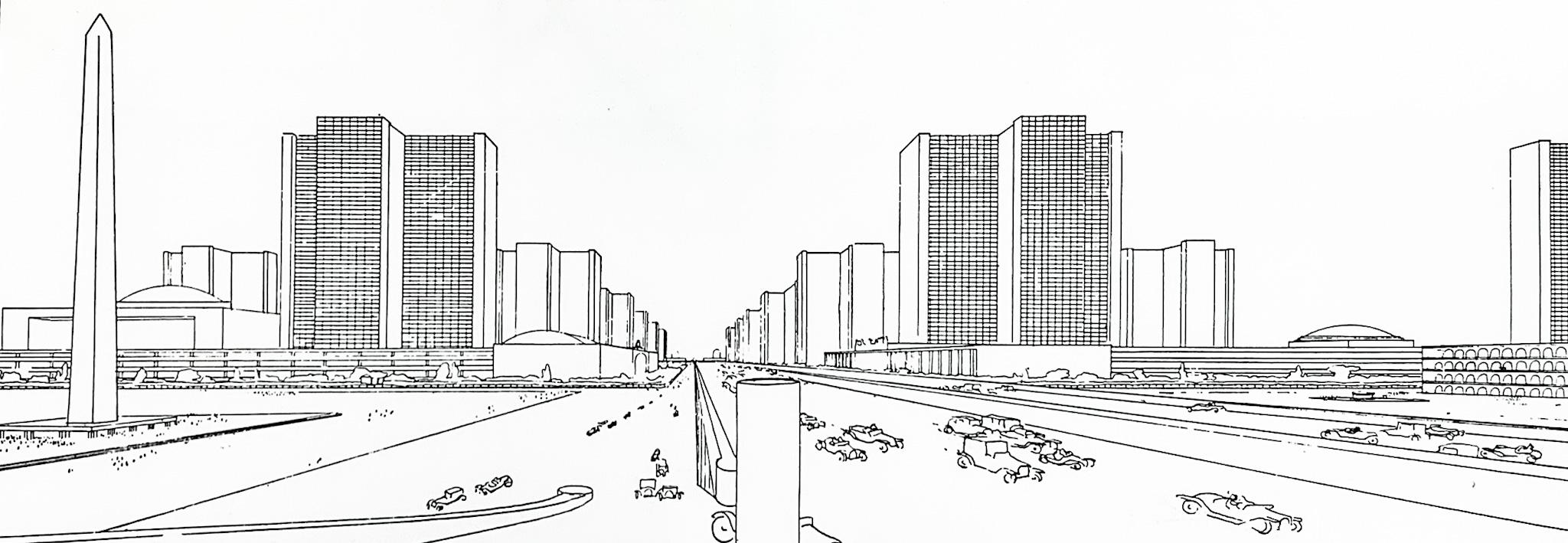
速度と最低速度の交通規制の視点を重視した新たな交通のあり方を提唱した。この 計画では、1エーカー(「マンハッタンと同程度の横幅でのスケール 47 」から推定し て10k㎡と筆者が推測)の模型の中に500000人を収容するビル群を計画し、この エリア内に50000台の車が走行し、その内10000台の車が14レーンから構成され る高速道路に走行する絵を描いた。このようにこれまで上記で取り上げた事例に比 べ、高密化され、さらにスピードの重視された現代の都市に近い形が描かれた。
彼はこの中で4つの大きな原則を打ち出す 46 。(1)より多くの交通量を受け入れ られる道路設計(2)交通の方向の制御(3)交通を分離した歩行者優先(4)最高


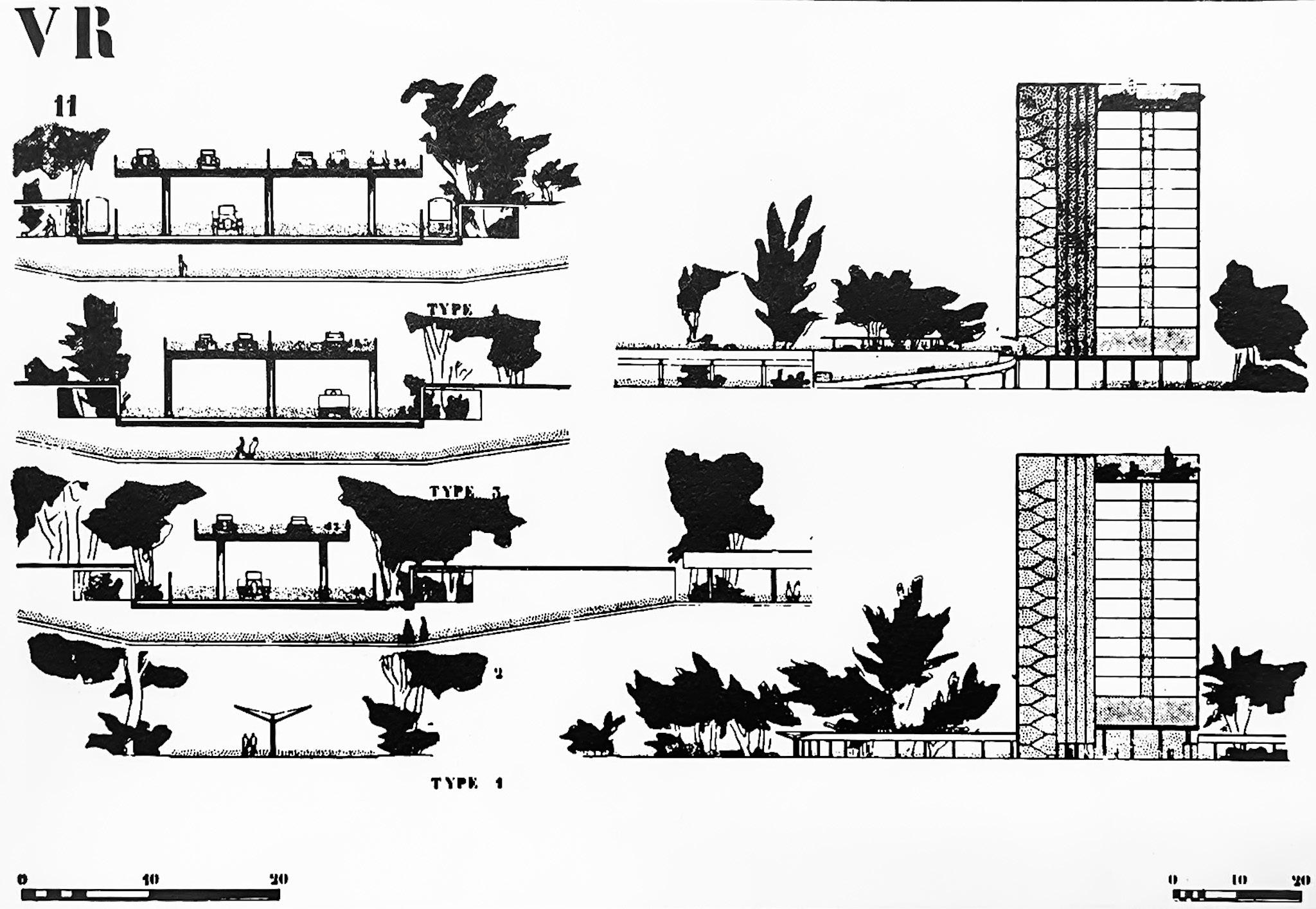
27 図22 地上レベルの建物と道路の関係性 図21 14レーンからなる高速道路
良質な居住環境のスケールと新たな道路構想
他の工業化を迎える中心都市に対して、日常的な生活を良質な住環境の元で行う 構想がペリーの田園都市やブロードエーカーシティ、工業都市、近隣住宅論などで 見られた。またこれらの都市は鉄道や自動車によるネットワークが外部の都市と結 ばれていたが、独立した環境下での生活について焦点を当てて描かれていた。一方 でこれらの構想に対しては、生活サービスを維持するための人口が足りていないと いう指摘がなされたり、実際にネットワークを経由してより大きな店舗などへ移動 することなどが行われてきた。つまり、良質な環境での暮らし方という点について は評価がなされていたものの、実際に実行させるに当たっては、外部に対して生活 サービスを依存する形になった。
これに対してル・コルビュジェは都市部に対する構想や、インフラ網そのものに 対するデザインを行ってきた(表3)。特に1930年ごろまでは高速道路などのスピー ドのあり方と、その結果生じてくる郊外と都市の関係性がデザインした。1940年 代においてはより詳細な道路利用の構造化を行いながら、近隣住区の最小単位とし ての「ユニテ・ダビタシオン」などが計画された。これらのインフラと高層建築の あり方、そして自動車の弊害を解決を試みたフューチャーラマで次の時代が展開さ れた。
第二章 これまでの移動と建築の関係
28
2.2.7 小結
以上のことから表2に示れるような、提案された都市のスケールなどを参照し、 良質な住環境のあり方を追求しながら、一方で自動運転による生活サービスがどの ような水準で行うことができるのか検討することが重要であると考える。またこの 自動運転による生活サービスがどのような階層性を持った道路インフラへと変容さ せるかも、新たな建築を計画する上では重要になると考えられる。
1ac=0.4057k㎡ 1feet=0.3048m 1mile=1609.34mで換算
計画名 面積 人口 人口密度 (人/k㎡) 特徴 田園都市(中心部) 1000ac 30,000 7413 中心部に対し、鉄道で繋がった 衛星都市のような関係性をもつ。 5500区画、一区画あたり20feet ×130feet。
レッチワースでは1200ac 田園都市(農耕地) 5000ac 2,000 99 工業都市(市街地) 2.75k㎡ 35,000 12727 用途地域がエリアごとに分かれて おり、拡張性を持つために余白の 空間が多い。市街地は5.5km× 0.5kmで構成。 300万人の現代都市 (中心部) - 500,000 29653 計画人口1acあたり120人。85% がオープンスペース。超高層では 3000人/ha、周囲の低層ビルは 300人/ha。 近隣住区 160ac 5,000~9,000 13900 歩行者中心の街区構造と歩車分 離がなされた3段階の道路構 造。小売店舗が住宅から歩行圏内 (1/2mile)に配置。 輝く都市 - - 98842 計画人口1acあたり400人。2700 人のアパート住戸で一人あたり14 ㎡の床面積をベースとする。 ブロードエーカー シティ 2560ac 5,000 483 1acの土地がひと家族あたりに与 えられる。一部には15階建ての マンションが分散配置。 ユニテ・ダビタシ オン - 1600人 - 17階建て 日本:都市部 14.0625k㎡ 223825 15916 日本:地方都市 14.0625k㎡ 67972 4834 年代 計画名 特徴 1922 300万人の現代都市 伝統的な都市道路から地面レベルからあげた、幅120フィー トの道路を整備。街区は400m×600mのグリッドで分割 され、200mごとに二次交通のための道路を整備。 1930 輝く都市 地上5mに道路を設け、歩車分離を実現。地上レベルは重 量トラック用、5m上のレベルは高速自動車交通用、道路の 下に歩行者専用道路があり、地上レベルには街路と並行に 路面電車の軌道が敷設した「TYPE4理論」を展開。街区は 400m×400mで定義。 1930 アルジェ計画A 高さ100mの高速道路に対して高さ30mから共同住宅を組 み込む。車はエレベーターで地上部に移動。18万人が暮ら す建築群を構想。 1947-1952 マルセイユ計画
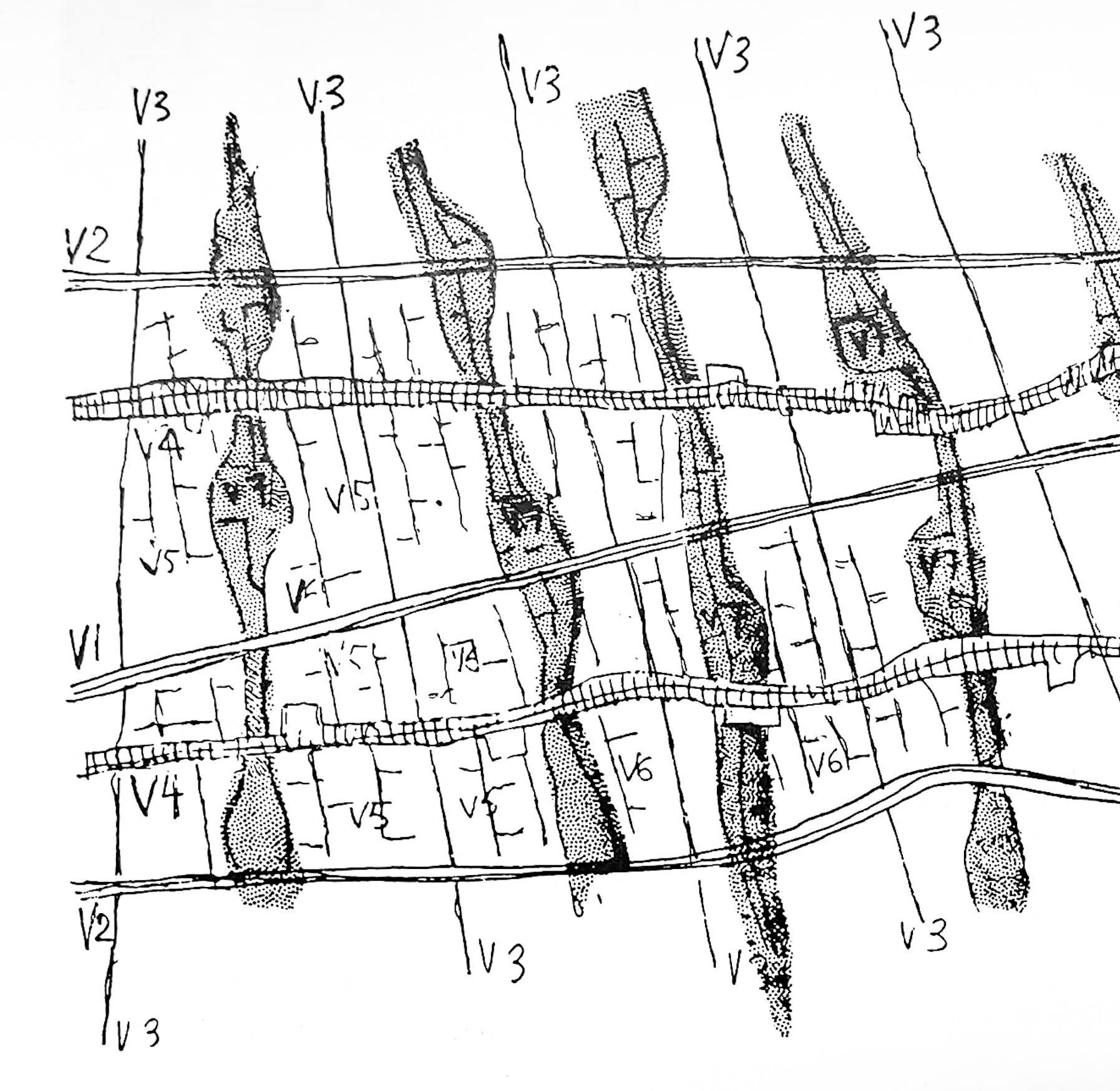
表3 コルビュジェの都市計画と道路計画の関係性
道路を用途別に等級化する「V7の理論」を展開。V1は地方 を結ぶ幹線道路を表し、V2は主要都市幹線、V3は住区を囲 む自動車道、V4はショッピング通り、V5とV6は各住戸に い至るための道路、V7は公園の中に設けられた歩行者専用 道路まが整備。またた近隣住区の最小単位として1600人が 暮らす17階建ての「ユニテ・ダビタシオン」を計画。
29
表2 都市構想と人口密度
2.3.1 日本の自動車黎明期
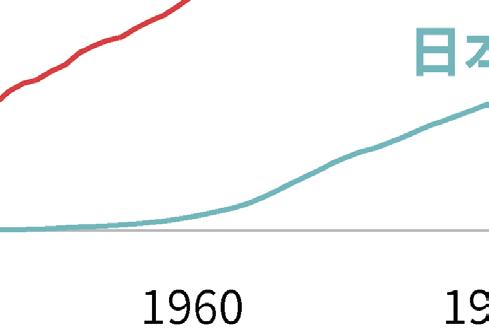
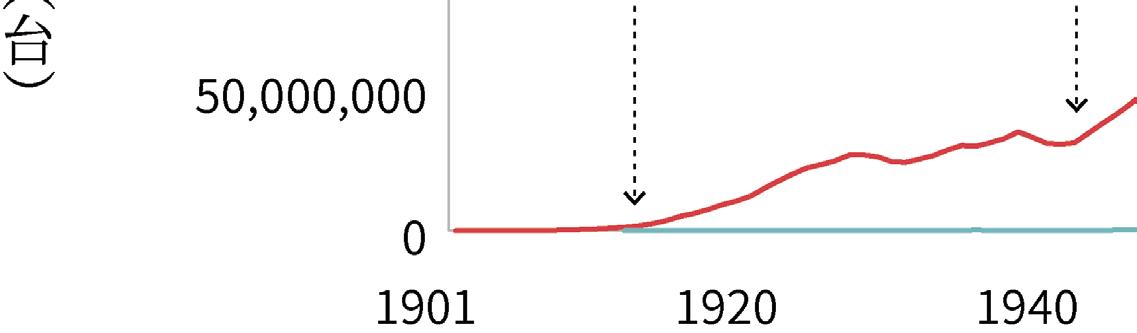
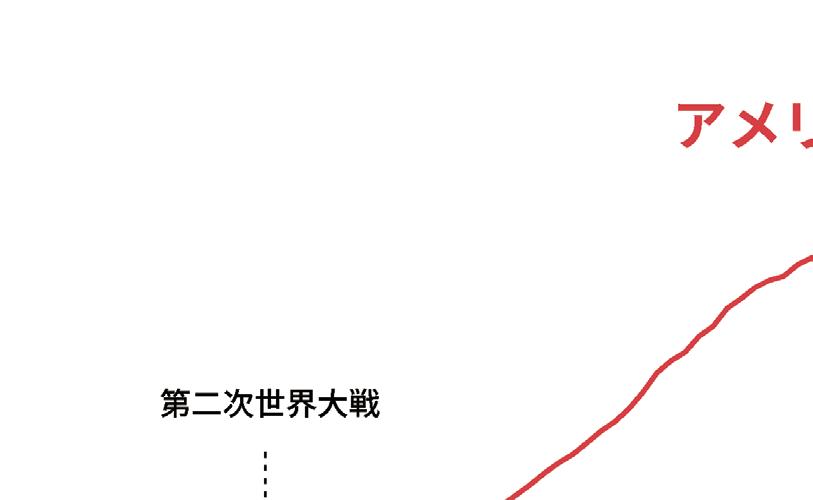
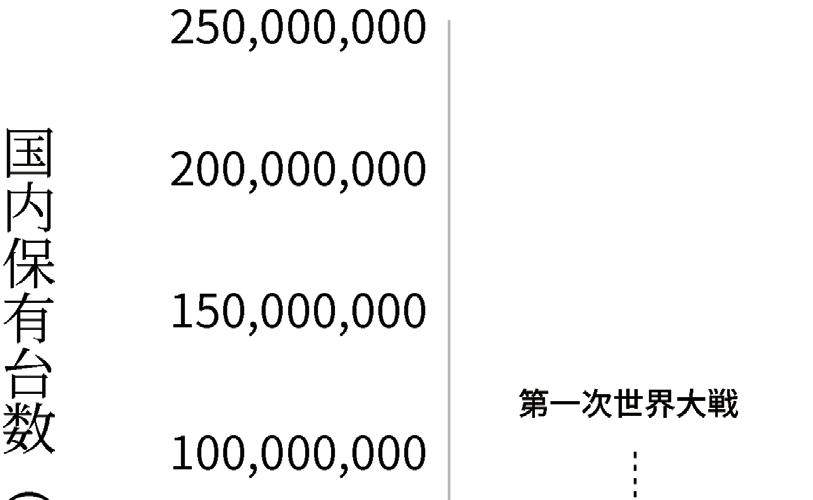
日本においては、自動車の普及時期が他国に比べて遅く、大きな伸びを見せたの は1950年代に入ってからである。これらの要因としてあったのが、鉄道を中心と した国土開発と道路環境の整備によるものが影響しているとされている 48 。したがっ て、戦前においては自動車を前提とした都市計画というものは筆者が確認した範囲 において、あまり発表されていないように思われる。本章では鉄道を軸として開発 された田園都市と1950年代以降に開発された高速道路網に関連する事例、また戦 後において急速に変化した住宅機能などについて分析する。
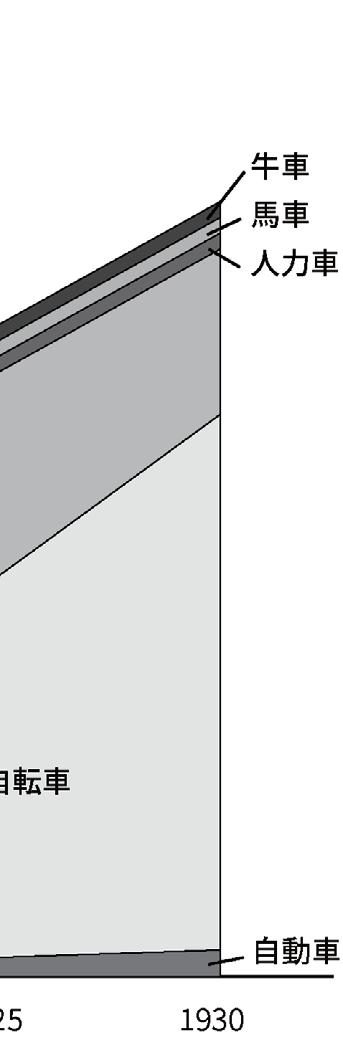
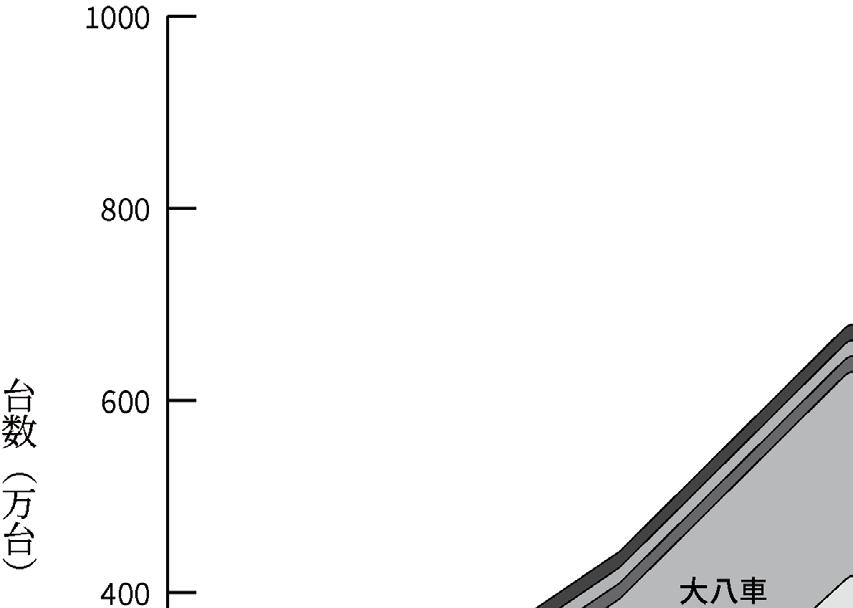
江戸幕府の政策にしたがい、旅人が車(ここでは自動車ではなく大八車などを指 す)を利用することは1862年ごろまでほとんど許可されておらず 49 、許可後も大八 車や人力車などの利用が大きかったため、欧米で見られた馬車などに対応するた めの舗装道路が発達しなかったとされている。このような道路の舗装については 1950年ごろまで大きく変化することがなく、戦後復興を行うために送られたワト キンス調査団による「ワトキンス・レポート」においては、「日本の道路は信じが
第二章 これまでの移動と建築の関係
30
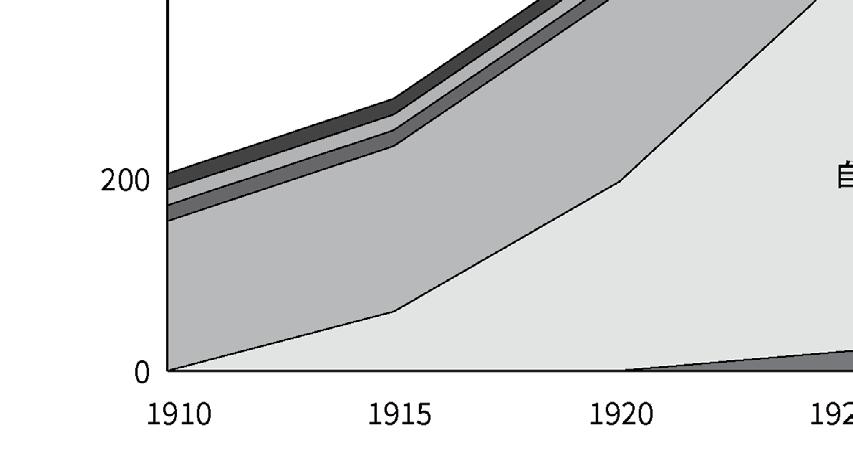
応するための舗装などが十分に整備されておらず、これらが自動車の普及を妨げた 一つの理由にあると考えられる。 2.3 日本における自動車と 都市計画(1920-1960) 図23 1900年代初頭における車両種別車両台数 原典:「警察統計年表」内務省警保局 出所:牧野克彦:自動車産業の興亡, 日刊自動車新聞社,
たい程に悪い。工業国にして、これ程完全にその道路網を無視してきた国は、日本 の他にない。 50 」などと評価されている。このように日本においては、自動車に対
2003, p59


31 図24 ワトキンスレポート 雨の日の道路状況 図25 ワトキンスレポート 粉塵が舞い立つ道路
一方このような状況の中、鉄道の整備は着々と進められていく。明治政府は当初 道路の改良に重点を置くという方策を検討していたが、そこには膨大な資本投資が 必要であり、事実上この計画は現実的でないとされた 51 。この結果、鉄道はその大 きな輸送能力を買われ、1872年に開業が行われた。その後も鉄道優位な方策が続き、 1892年には官設鉄道の営業キロ数は983.5km、私設鉄道は2124.4kmに達してい た。 2.3.2 鉄道事業者による沿線開発
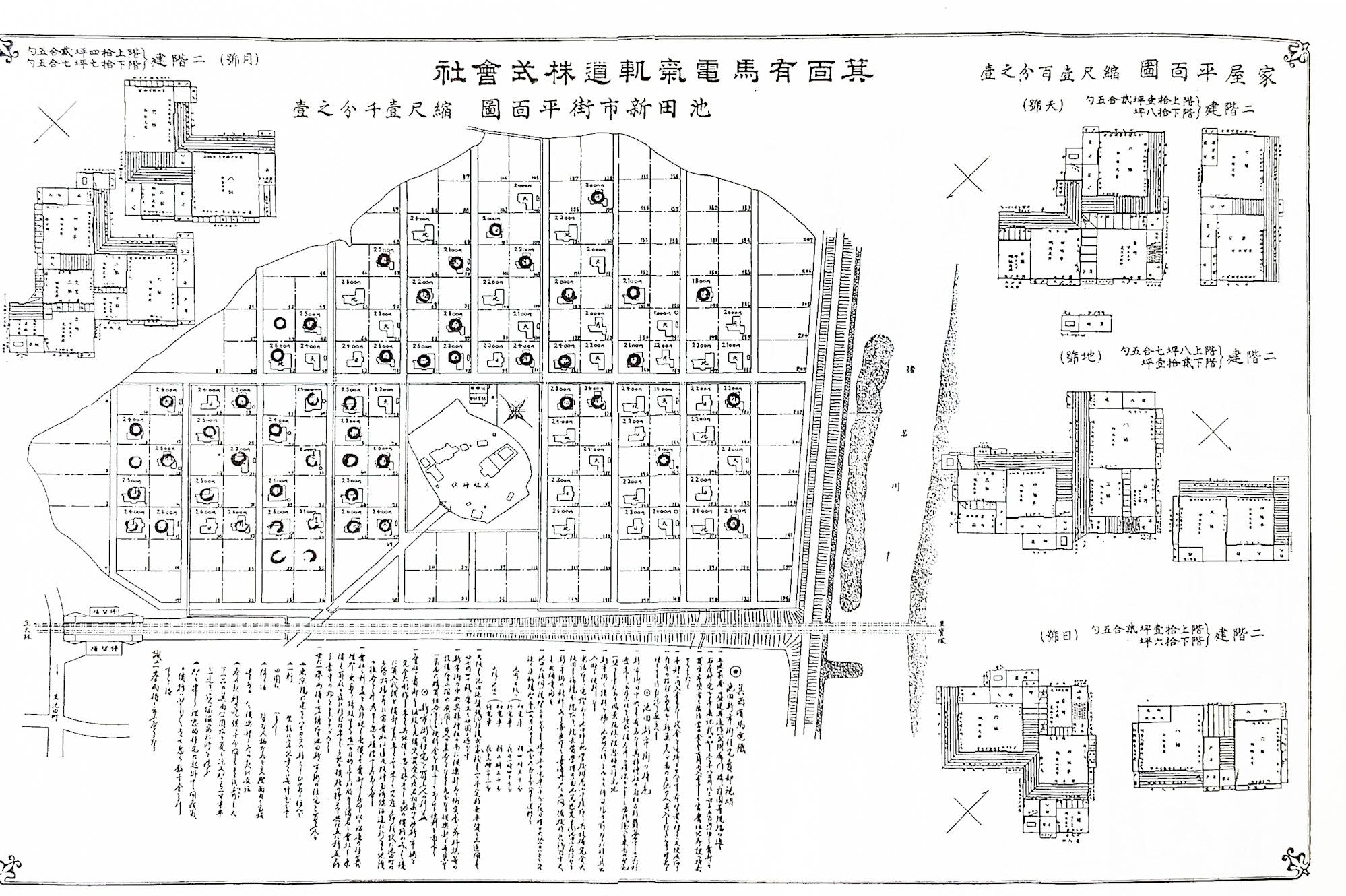
鉄道に対する追い風が吹くなか、私鉄の箕面有馬電気軌道(現在の阪急電鉄)の 実質的創業者である小林一三は「乗客を作り出す」という発想のもと、新たな沿線 開発を進めていった。小林一三は1910年、理想的な住宅像として広い庭園や客間 居間などの存在を謳った「模範的郊外生活」という新しい生活スタイルを宣伝しな がら、池田室町の分譲を開始した。1915年までに呉服神社を中心としてその周囲 に広がる33,020坪の土地に227区画を分譲した。一区画は約100坪として、二階 建ての5~6室、約27坪の家屋が建設された 52 。また周囲の道路は二間が標準で、側 溝のある通りにおいては2.25~2.75間程度であったとされる 53 。自動車に関する言
第二章 これまでの移動と建築の関係
32
及などは筆者が確認した範囲では見られず、道路の幅や年代からも、自動車を想定 した住宅地ではないと推測する。このような住宅は中流階級のサラリーマンを対象 としており、良質な住宅地と中心市街地を鉄道によって通勤するという、沿線開発 手法として広く波及していくこととなった。また池田室町では、次第に神社周辺の 図26 池田室町の配置図
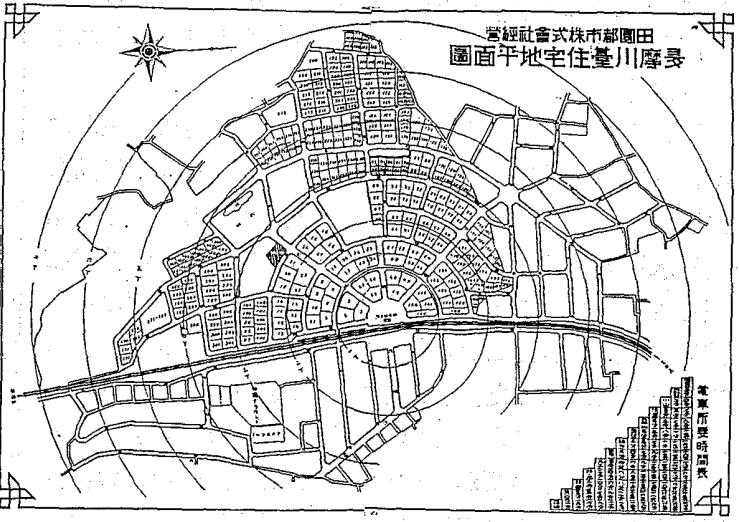
街区で商業化が進み、当初計画されていなかった食料品やたばこ屋などが集まるな ど下町的な発展が見られた 54 。これの池田室町の事例がハワードが提唱した田園都 市を日本で最初に体現した事例と言われている 55 。 東京では、渋沢栄一の「田園都市株式会社」が設立され、1922年に田園調布で の面積八万坪(約26.5ha)の開発が開始された。計画は4段階に渡って行われ、 それぞれの敷地は駅周辺では300坪程度のであったが、後半に分譲された周辺部 の敷地においては100~150坪のものが多かった。 また同社が宅地販売時に示した条件として、建蔽率50%以下、3階以上の建物 の建築や道路幅の変更は不可、垣根・境界の整理整頓などが示されており、これら に加えて上下水道や電灯、銀杏並木道、公園の整備などインフラ整備をおこなっ た 56 。 配置計画としては、街の中央に配置された駅舎に対して西側を住宅専用地、 東側を商店街として土地利用を分割するなどが提案された。 渋沢秀雄は、父栄一の命を受け視察した欧米諸都市の街並みを参照し、1丁(約

33
109m)ずつ半径が増す同心円と放射状の道路で構成する街区構造を使用した 57 。こ うした街区を構成する道路幅は4m以上、幹線道路は13mが確保されたが、これ らの道路は当初未舗装で砂利が敷き詰められただけであった。 調布駅(現 田園 調布駅)の開通当時の写真には渋沢栄一を待つ自動車の様子もあることから、ある 程度自動車の時代を見据えた道路幅になっていると筆者は考える。 以上のように、戦前においては鉄道を基軸とした中流階級のサラリーマンを対象 とした、中心市街地から離れた位置にあった田園地帯に対して、新たな住宅地の建 図27 田園調布の配置図 図28 調布駅(現:田園調布駅)開業当時の様子
設が進められていたことがわかる。また結果として都市構造自体が鉄道に適した 形で形成されることとなり、1923年に発生した関東大震災の後に計画された1927 年に公示された「大東京都市計画道路網」の推進に影響を与えたとされている 58 。 2.3.3
その後第二次世界大戦に突入していき、この際に東京の戦災復興計画に尽力した 石川栄耀が、防空都市の一形態として「帯状都市」を「大東亜区域に於ける国防都 市計画」のひとつとして紹介している 59 。 「帯状都市」とは「工場と住居が一列づ つ五乃至六〇米の緑地帯によって張り合わせてある細長い都市」であり、この計画 はコルビュジェの「オビュ計画」(前節の「アルジェ計画」)が参照されていると言 われている 60 。つまり、自動車や高速道路などのインフラ網を踏まえた都市構想を
34
第二章 これまでの移動と建築の関係
試みようとしていたことが窺え、石川は戦前のかなり早い時期から「帯状都市」や 「ロードタウン
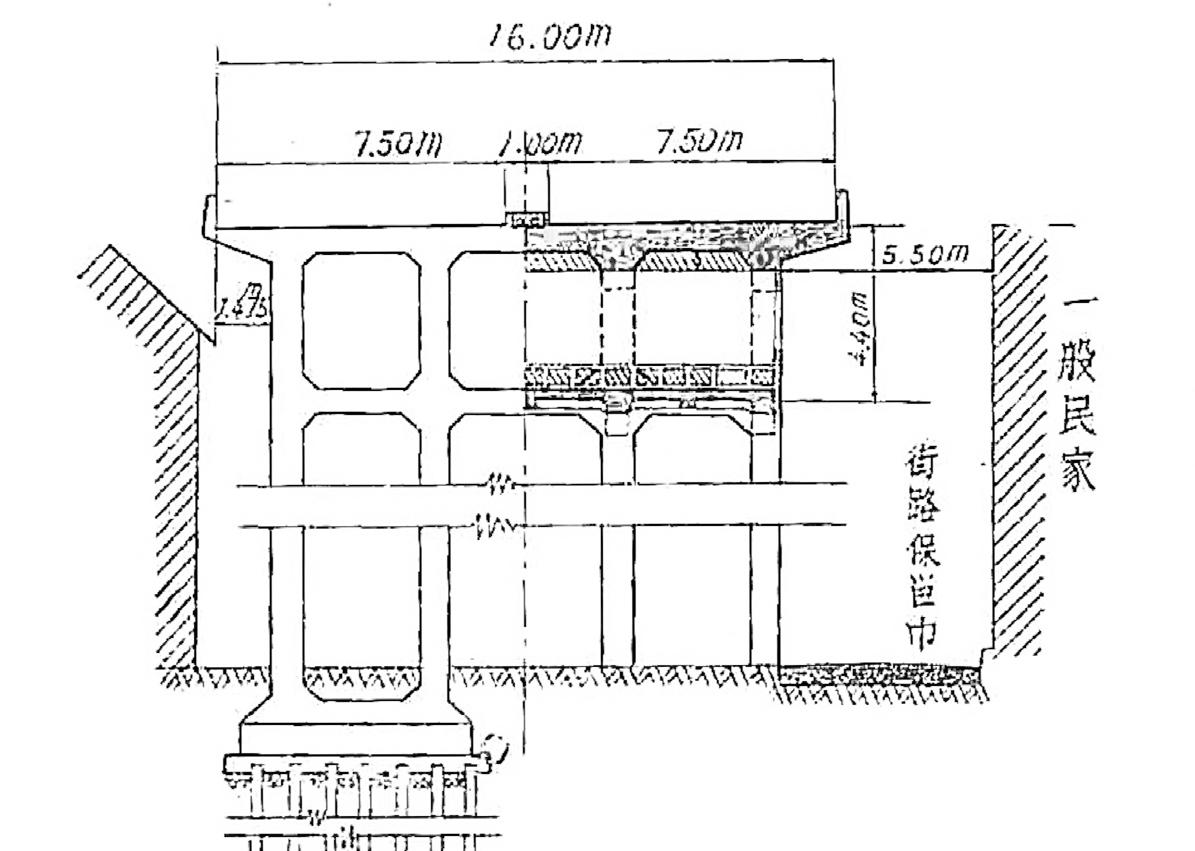
」について注目していたと考えられたとされている。 石川は戦後、銀座にて全長1200m、地下4階・地上12階でビルの2階部分に道 路を設けるという「スカイビル及スカイウエイ 62 」でこの構想を実現したとされる。 この計画では地下に「パーキング(500台)」と「ガレージ(2400台)」が配置さ れ、地上部には「屋上緑地帯」を備えた「貸事務所高層建築」として利用されると 図29 高速道路と建物が一体化したスカイビル 図30 東急ターンパイクの断面図
戦後の高速道路網の整備と新たな建築像
61
している 63 。最終的に「スカイウエイ」は構想に止まったが、「スカイビル」はその 後1951年に実現がされた。 また1954年に東急の五島慶太は渋谷から江ノ島の間での「東急ターンパイク」 を提案した。特に渋谷から二子玉川間における構想が東急の社内誌『清和』に記載 されており、3階部分にターンパイク、2階部分に鉄道、1階部分の高架下をガレージ・ 倉庫・商店・事務所・住宅として利用する「路下室」などが示されていた 64 。また これらの空間は3500戸の「永久不燃家屋」(15坪/戸、2層を想定)として提供 するプランが検討された



35
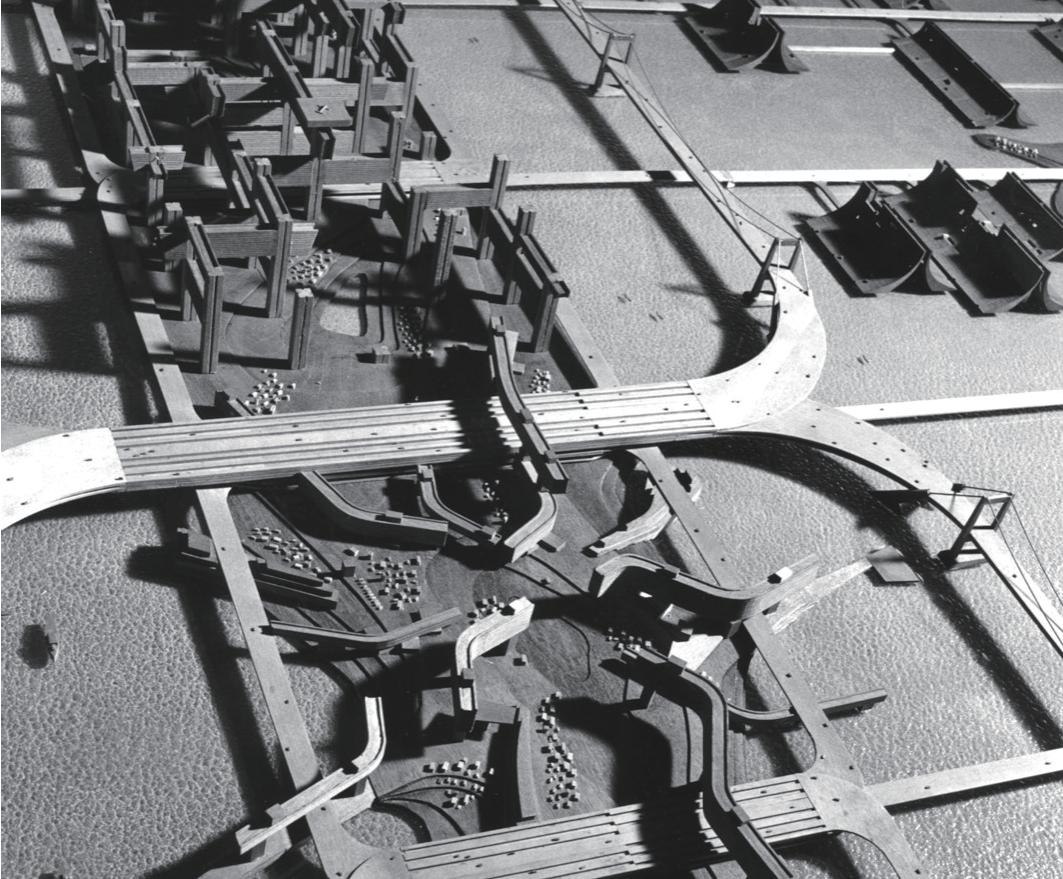
以上のように、戦後復興の段階においては、高速道路をはじめとしたインフラ網 と一体化した建築群の検討などが行われていたが、実現された例は限られていた。 また欧米諸国とは異なり、多くの計画は諸外国の計画を参照し計画されたものが多 い。 2.3.4 丹下健三による交通インフラと都市の形成 このような状況の中、建築家の丹下健三は国土計画に関わるようになった。丹下 図31 東京計画1960の俯瞰図 図32 東京計画1960の計画模型
65 。
は都心への人口集中を肯定的に捉える姿勢をとり、人々は雇用や学習の機会を得る ために都心へ向かい、この自らの意志で都心へ向かう力こそが戦後経済復興の礎と 考えていた 66 。 丹下はこの主張に従い、1952年にコンペで一等を獲得した、現在 の東京国際フォーラムがたつ敷地に対して東京都庁舎の設計を行うことになった。 ここでは自動車渋滞の緩和を目的とし、都庁舎へ向かう歩行者の移動を中二階レベ ルに設定し、自動車と歩行者の移動を円滑に分離することを試みた。最終的には① 首都圏全域から都庁舎(都市のコア)を目掛けて、電車や自動車で水平移動②都庁 舎のEV(建築のコア)により垂直移動し、各フロアへ分散③都庁舎足元のピロティ はラッシュ時を除いて人口密度が低く、快適ということを達成しようとしていたと 考えられる 67 。
1950年代、丹下は東京都心への人口集中は経済復興のためには必要であると考 え、人口が集中する、都心・有楽町で東京都庁舎の設計を行い、またこれらを裏付 けるベク、同心円の統計モデルを構築し、都心からの距離で人口動態を把握しよう とした 68 。 しかし、1950年代後半になると副都心である新宿や池袋、渋谷、品川、 上野などの駅に対して人口が集中するようになる。このような状況を踏まえて、同 心円モデルから線形モデルへの切り替えを行い、過度な人口流入に耐えることので きる都市としようと試みた。また丹下は東京都が推し進める人口分散的な衛星都市 モデルは思想が古すぎて経済発展を阻害していると考えていたとされる。この社会 状況を踏まえて「東京計画1960」を提案することにつながる。
以上のように日本においては、諸外国のような一つの地域に対して都市モデルを 構築するよりも、高速道路や鉄道といったネットワークとの関係性を捉えながら都 市構想が行われてきたことがわかる。またこの要因として、常にインフラの十分な 発達が行われていなかったことが考えられる。 一方で、自動運転車の普及においては、すでに完成されたインフラを活用した取 り組みが今後推進されていくことが予測される。次章において、現在検討が進んで いる自動運転車の導入環境やその背景の社会課題などについて見ていく。
第二章 これまでの移動と建築の関係
36
2.3.5 小結
日本においては道路インフラの整備が遅れたことにより、鉄道中心の都市構造が 描かれてきた。したがって、駅を中心とした生活圏が築かれ、また鉄道を利用した 通勤というものが形作られてきた。またこれらを維持するための中流階級のサラ リーマンを対象とした沿線開発というものが鉄道事業者によって推進されてきた。 第二次世界大戦以降は鉄道網だけでなくより多くの輸送能力を手にするため高速 道路を中心とした、道路インフラの強化が行われた。この新たな都市構造物を活用 するため、「スカイビル」や「東急ターンパイク」などが検討された。一方で、田 園都市を模倣した沿線開発や、コルビュジェの「アルジェ計画」などを参考にした 高速道路計画などは、海外の事例を踏襲した形とも言えると考える。
丹下健三は通勤などによって生じる、都心と郊外に対する人口動態を定量的に検 討しながら、立体的な人の動線を検討した「旧東京都庁舎」や広域での都心部と居 住地の関係性を捉えた「東京計画1960」にて独自の建築のあり方を提唱した。
以上のことから、自動運転のサービスが普及していくためには、日本独自に極め て強い発展を遂げた鉄道や駅との関係性を今後考えていく必要があると考える。つ まり、これまでの求心性の高い駅開発だけでなく、分散的な自動運転による生活サー ビスの提供と、鉄道による都心部への移動や駅そのものの提供価値に関する関係性 を見直すことが新たな生活像を描く上で重要な要素となる。このようなことが、丹 下健三が提唱した「東京計画1960」のように日本独自のあり方について検討する きっかけになり得ると筆者は考える。
37
1. 磯崎新, 藤村龍至, ユートピアはどこへ―社会的制度としての建築家 (磯崎新建築論集 第6 巻), 岩波書店, 2013
2. Zaheer Allam, Carlos Moreno, Didier Chabaud & Florent Pratlong , Proximity-Based Planning and the “15-Minute City”: A Sustainable Model for the City of the Future, The Palgrave Handbook of Global Sustainability, pp 1–20, 2021
3. STATE MOTOR VEHICLE REGISTRATIONS, BY YEARS, https://www.fhwa.dot.gov/ ohim/summary95/section2.html
4. 大阪府:「大阪における自動車環境対策の歩み 平成25年版」, https://www.pref.osaka. lg.jp/attach/5004/00159619/0-1-1234.pdf
5. Ebenezer Howard: The Transit Problem and the Working Man, The Planning Review, Vol4, No.2, pp.127-129,1913
6. Ebenezer Howard, Garden Cities of To-Morrow, LONDON:SWAN, 1902, p23 7. 同書 p22 8. 同書 p129 9. 同書 p130 10.
堀江興, ハワードの田園都市思想と都市形成の変遷ーイギリス・レッチワースを例としてー, 新潟工科大学研究紀要 第6号, pp31-47, 2001 11. 吉田鋼市:トニー・ガルニエ, 鹿島出版会, 1993 12. 同書 p53 13. Le Corbusior, “Towards a New Architecture”, New York:Frederiick A Praeger, 1959, p51 14. Antonio Amado, Voiture Minimum Le Corbusier and the Automobile, The MIT Press, 2011, p3 15. Le Corbusier, City of Tomorrow and Its Planning, p. 179.
38 参考文献
第二章 これまでの移動と建築の関係
16. ル・コルビュジェ著, 坂倉準三訳, 輝く都市, 鹿島出版会, 1968, p82 17. 同書 p57 18. Le Corbusier, The Four Routes, London: Dobson, 1947 19. Le Corbusier, “The City of To-morrow”, p.170 20. 同書 p101 21. Le Corbusier et Pierre Jeanneret: oeuvre complete 1910-1929. Vol. 1, 1964 22. ノーマ・エヴァンソン, ル・コルビュジェの構想―都市デザインと機械の表徴―, 井上書院, 2011, p17 23. ル・コルビュジェ, 人間の家, 鹿島出版会, 1977 24. ル・コルビュジェ, 輝く都市, p57 25. 同書p88 26. Le Corbusier, “The Radiant City”, p321 27. ノーマ・エヴァンソン, ル・コルビュジェの構想, p40 28. 同書p50 29. Lewis Manford, “The Sky Line: The Marseilles Folly”, The New Yorker, 1957, p92 30. ノーマ・エヴァンソン, ル・コルビュジェの構想, p74 31. Perry, Carence A. 倉田和四生, 近隣住区論, 鹿島出版会, 1975 32. 同書p28 33. 同書p100 34. 杉山茂一, すまいのテクノロジー 密度論から見たアーバンビレッジの意味, 住総研, すまい ろん, p50-53, 2003 35. Perry, 近隣住区論, p113 36. Johnson, Donald Leslie, Frank Lloyd Wright Versus America: The 1930s, New York:
39
MIT Press, 1990 37. Nelson, Arthur C., The Planning of Exurban America: Lessons from Frank Lloyd Wright’s Broadacre City, Journal of Architectural and Planning Research., Vol. 12, No. 4: 337-356, 1995 38. Brown, Zara A., Broadacre City, 1932-1959. Baton Rouge, Louisiana State University, 2007 39. Wright, Frank Lloyd, The Disappearing City. New York: Stratford Press., 1932, p11 40. Lewis Mumford, 反都市としてのメガロポリス1,「現代都市の展望」, 鹿島出版会, 1973 41. Emilia Stankiewicz, Frank Lloyd Wright’s Broadacre City as a manifestation of American values of freedom and democracy, Crossroads. A Journal of English Studies, 2015, p32 42. Frank Lloyd Wright, The Living City, Horizon Pr, 1958, p78 43. 水上優, F.L.ライトの都市思想における「ブロードエーカー・シティ」のフォーム,日本建 築学会計画系論文集. 第581号,pp.211-218, 2004 44. Nelson, The Planning of Exurban America: Lessons from Frank Lloyd Wright’s Broadacre City, p342 45. Geddes, N. B., Magic Motorways (Vol. 1), Random House, 1940 46. Robert Coombs, Norman Bel Geddes: Highways and Horizons, The MIT Press, pp.1127, 1971 47. Adnan Morshed, The Aesthetics of Ascension in Norman Bel Geddes’s Futurama, Journal of the Society of Architectural Historians, Vol.63, pp74-99, 2004 48. 川辺謙一, 東京道路奇景, 草思社, 2016, p151 49. 谷釜尋徳, 幕末期における旅人の移動手段としての荷車の誕生, 日本体育大学紀要36巻2号, pp197-208, 2007
40 参考文献 第二章 これまでの移動と建築の関係
50. ワトキンス調査団, 日本国政府建設省に対する名古屋・神戸高速道路調査報告書, 建設省道路 局, 1956
51. 原田勝正:交通・運輸の発達と技術革新, 東京大学出版会,1986, p52
52. 松原淳・山川仁, 戦前の東京圏における民営鉄道による沿線開発と学園町の形成, 第6回日 本土木史研究発表会論文集, 1986
53. 吉田高子「池田室町/池田 小林一三の住宅地形成と模範的郊外生活」、『近代日本の郊外住 宅地』鹿島出版会、2000
54. 柴田建, 100年目の郊外住宅地, 家とまちなみ60, p68~74, 2009
55. 大塚良治:私鉄ビジネスの変遷と展開, まちづくり戦略研究, 2020巻2号, p22-34,2020
56. 津川康雄, 都市プランの成立とランドマークの機能, 地域政策研究:高崎経済大学地域政策学 会, 第16巻第2号, pp131~146, 2014
57. 福島富士子, 田園調布の計画の変遷について, 第32回日本都市計画学会学術研究論文集, pp55~60, 1997
58. 川辺謙一, 東京道路奇景, p161
59. 石川栄耀「国防と都市計画」山海堂出版部、1944
60. 堀田典裕, 自動車と建築 モータリゼーション時代の環境デザイン, 河出ブックス, 2011, p80
61.
E.Chambless, Roadtown, La Vergne, 1910
62. 秀島乾:「スカイビル乃スカイウエイ」『新建築』,新建築社,1950
63. 堀田典裕, 自動車と建築, p76
64. 東急100年史https://www.tokyu.co.jp/history/chapter02_3_2/
65. 堀田典裕, 自動車と建築, p82
66. 豊川斎赫, 丹下健三 戦後日本の構想者, 岩波新書, 2016, p26
67. 同書, p31 68. 同書, p53
41
図3,4,5 Ebenezer Howard, Garden Cities of To-Morrow, LONDON:SWAN, 1902 図6,7,8 吉田鋼市:トニー・ガルニエ, 鹿島出版会, 1993 図9,10,11,12,13,14 ノーマ・エヴァンソン, ル・コルビュジェの構想―都市デザインと機械の表徴―, 井上書院, 2011, p17 図15,表1 Perry, Carence A. 倉田和四生, 近隣住区論, 鹿島出版会, 1975 図16 Farm Security Administration/Office of War Information Black-and-White Negatives: Airview. Radburn, New Jersey, 1935 図17,18,19 ライト50年記念事業:http://www.wright50years.com/haifu-shiryou--mokuji/2burodoekashitimokei-no-kaisetsu
図20,21,22 Geddes, N. B., Magic Motorways (Vol. 1), Random House, 1940 図24,25 Geddes, N. B., Magic Motorways (Vol. 1), Random House, 1940 図26 吉田高子「池田室町/池田 小林一三の住宅地形成と模範的郊外生活」、『近代日本の郊外住宅地』 鹿島出版会、2000 図27 原典:渋沢資料館 出典:福島富士子, 田園調布の計画の変遷について, 第32回日本都市計画学 会学術研究論文集, pp55~60, 1997 図28,30 東急100年史 https://www.tokyu.co.jp/history/chapter01_2_2/ 図29 https://www.tokyu.co.jp/history/chapter01_2_2/
第二章 これまでの移動と建築の関係
42 参考文献
図31,32 丹下都市建築設計 https://www.tangeweb.com/works/works_no-22/
43
44 第三章 現在の自動運転車を取り巻く環境
45
第3章: 現在の自動運転を 取り巻く環境
目的: 自動運転の実現化に向けて、国の方針となる「官民 ITS構想・ロードマップ」が毎年改訂を行いながら示 されている。一方で技術開発や地域需要に応じた実証 実験、法規制の改訂など課題は依然として山積してい る。また自動運転の導入に向けた、新たな渋滞の発生 や価格と普及率の関係性、二酸化炭素排出量などの観 点に対するインパクト評価が行われている。本章では、 自動運転車が普及する中で、特に都市計画に影響を与 えうる要素の特定を行うため、現在の自動運転車を取 り巻く環境について考察を行う。
3.1.1 現状における自動運転のレベル 現在、日本では自動運転レベル4のフェーズに向けて規制緩和等を含めた準備が 進んでいる。2022年4月に「道路交通法の一部を改正する法律案」が衆議院で可 決されたことにより、2023年4月よりバスなどの限定サービスでレベル4での公 道の走行が可能になるとされている 1 。レベル4の自動運転とは「特定条件下にお ける完全自動運転」とされる、特定の状況下においては全ての運転タスクをシステ ムが行うという状態を指す 2 。つまりドライバーへの運転権利譲渡などが発生せず、 ドライバーは乗車をしているだけの状態となるなど、新たな局面を迎えている。 一方、現在国内で主に行われている実証実験は、レベル4相当に対応した車両を レベル2の状態で運用されている。レベル2とは「特定条件下での自動運転機能」 とされており、高速道路などにおいて安全性が確保された状態ではシステムが操作 するものの、最終的な責任はドライバーが求められるという状態である。筆者も 2022年10月にレベル2の公道での試乗を行ったが、既にドライバーの補助がなく ても、車線の変更や右左折、路肩への停車発進などをシステムによってスムーズに 行うことができていると感じた。またレベル3については福井県永平寺町での実証 実験と、世界に先駆けて発売が行われた、Honda「Legend」が挙げられる。

46 第三章 現在の自動運転車を取り巻く環境 3.1 現在の自動運転車の動向
図1 自動運転レベルと現状の到達状況 出典:ベリサーブ,自動運転の実現に向けた国土交通省の取り組みについて
2021年まで ・2021年度中の「導入型」有人隊列走行システム(ACC+LKA) の商業化を発表以降、発展型としてより高度な車線維持機能(割 込車、登坂路、 車線変更等への対応)を加えた有人隊列走行の開発・商業化を 目指す
2022年度以降 ・新東名(浜松SA~遠州森町PA)にて後続車の運転席を実際に 無人とした状態でのトラックの後続車無人隊列走行技術を実現 (2021年2月) レベル4 (自動運転)
高速道路でのトラッ クの後続無人隊列走 行
高速道路でのトラッ クの自動運転 2025年以降 ・実現に向けた2020年度前半の具体的な工程表を作成 ・民間において車両技術開発を推進 移動サービス レベル4 (自動運転) 限定地域での無人 自動運転移動サービ ス 2020年まで ・限定地域での無人自動運転移動サービス(自動運転車の専用の 走行空間においてレベル4(相当))を実現(2019年11月)(1
47 表1 ロードマップのKPI 出典:官民ITS構想・ロードマップより筆者が作成
2020年代前半 ・高速道においてドライバーは前方を注視しつつも、ハンズオフ が可能な運転支援システム(レベル2)を市場化(OEM各社) ・今後はより高性能なセンサー、カメラを搭載した車両が市場化
レベル 実現が見込まれる技 術 市場化等期待時期 評価(○:目標達成 △:一部実現 ×:未実装) 自家用車 レベル2 (運転支援) 一般道路での運転支 援 2020年まで 主要幹線道路(国道、主な地方道)において、直進運転が可能 な運転支援機能(ACC+LKA)を有するも、信号や交差点の通過 での支援機能は未実装 レベル3 (自動運転) 高速道路での自動運 転 2020年目途 ・改正道路運送車両法の施行(2020年4月) ・改正道路交通法の施行(2020年4月) ・高速道路渋滞時における自動運転システム(レベル3)を市場 化(2021年3月 ホンダ レジェンド) レベル1,2 (運転支援) 運転支援システムの 高度化
予定 レベル4 (自動運転) 高速道路での自動運 転 2025年目途 ・民間において車両技術開発を推進、レベル4におけるビジネス 価値を検討中 ・高速道路上の合流部等における道路側から情報提供を行う仕組 み等の検討 物流サービス 高速道路でのトラッ クの後続有人隊列走 行
年以上無事故でサービス提供し実現可能であることを確認した 上で、2021/4/1時点では公道でのレベル2として運用) ・限定地域での遠隔型(1:3)のレベル3での無人自動運転移 動サービス(車内保安要員無)が運行開始(2021年3月~)(2020 年12月~遠隔型(1:3)のレベル2での試験運行(車内保安 要員有)の上で移行) ・従来の「運転者」の存在を前提としないレベル4の自動運転を 想定した制度課題を検討中 レベル2以上 (運転支援・自 動運転) 高速道路でのバスの 運転支援・自動運転 2022年以降 ・宮城県気仙沼BRTの専用道区間(交差部なし)の一部約4.8 kmにて2021年1月より実証を実施。今後レベル3での運行を 目指す ・ひたちBRTの専用道区間約7kmでの実証を実施。専用道区 間内に複数の交差部があり、インフラ連携を組み合わせたレベ ル2での実証 計画通り 進捗 計画通り 進捗 計画通り 進捗 計画通り 進捗 計画通り 進捗
ロードマップで示された政府の実現目標としては主に3つの用途に分類が行われ ており、「自家用」「物流サービス」「移動サービス」が掲げられている。「自家用」 については運転車の補助的な存在として、レベル1~3程度の一般道路や高速道路 の走行に対する運転支援を目標としている。「物流サービス」については隊列走行 などをはじめとした高速道路での自動運転が掲げられている。最後に「移動サービ ス」については限定地域においてのレベル4でのサービス提供を大きな目標とし、 そのほかのバスをはじめとした公共交通に対する運転支援なども掲げられている。 以上のように2022年の時点においてはレベル4の実証実験が開始されるフェーズ にあり、レベル3までの自動運転を活用したサービスの技術的課題の抽出や利用者 のニーズ検証が行われている段階にある。本研究では、特に「物流サービス」「移 動サービス」に挙げられる、モノや空間の移動による影響を考察し、今後サービス が導入された後に起こる変化についての検討を目的とする。
3.1.2 具体的な実証実験について
ロードマップによると、2021年に向けて「自家用車における自動運転システム の更なる高度化」「運転者不足等に対応する効率的な物流サービスの実現」「地方や 高齢者等向け無人自動運転移動サービスの実現」の3つが重点的推進領域として示 され、実証実験が行われてきた。
現在、国が推進している実証実験として、経済産業省と国土交通省が協働で立ち 上げた「スマートモビリティチャレンジ 3 」がその代表的な存在である。加えて自 動運転レベル4の実装に向けた「RoAD to the L4 4 」が2021年度にスタートされ、 今後その役割を増していくと考えられる。この二つのプロジェクトが連携をしなが ら、実証実験が推進されている。
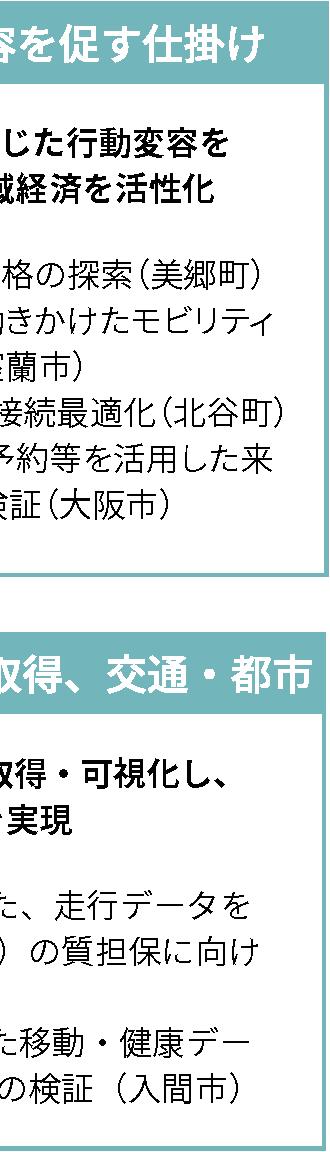
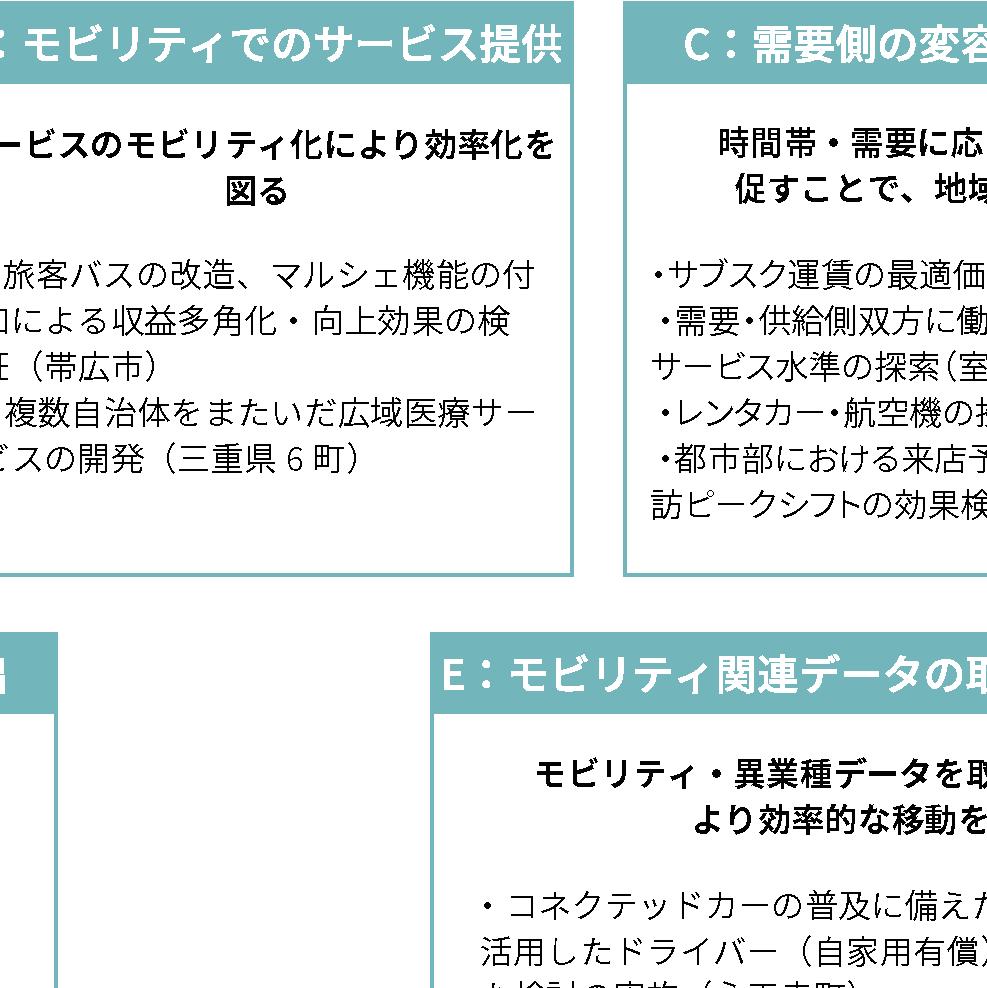
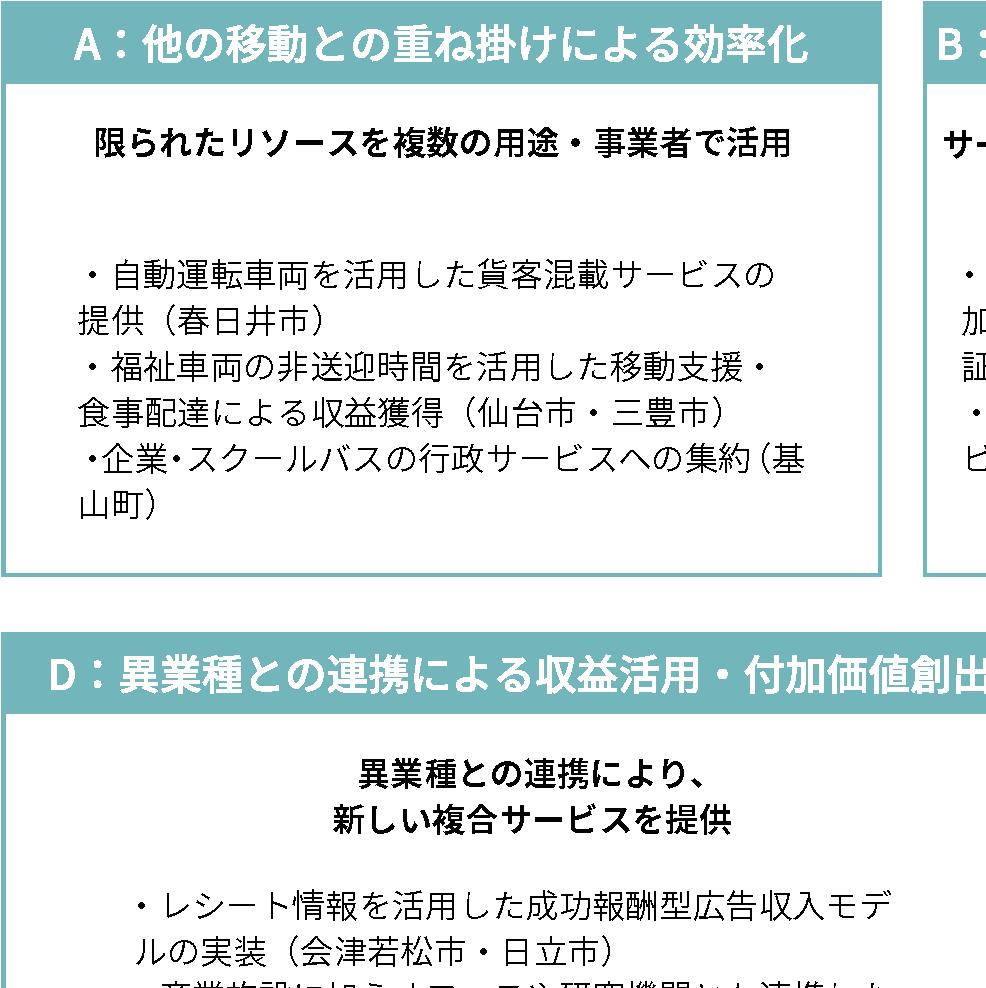
この取り組みで行われている事業の一つである「地域新MaaS創出推進事業 5 」 では、自動運転の普及を見据えたモビリティの実証実験が各地で行っている。令和 3年度の取り組みでは、5つの領域(1)他の移動との重ね掛けによる効率化(2) モビリティでのサービス提供(3)需要側の変容を促す仕掛け(4)異業種との連 携による収益活用・付加価値創出(5)モビリティ関連データの取得、交通・都市 政策との連携が定められ、全国14地域において推進された。現状の実証実験の目 的としては、自動運転の導入による影響に先立ち、その受容性・事業性などについ て検証が行われている段階である。この中で特に本研究との関連性が強い「(2)モ ビリティでのサービス提供」では北海道帯広市において、旅客バスを改造して、マ ルシェ機能を車両に付加することにより、収益の多角化・向上効果が得られるかの 検証が行われた。また三重県においては移動診療車を活用した複数自治体にまたが る広域医療サービスの受容性・事業性の検証も行われた。 この他にも、中山間地域においては、2017年より道の駅などを活用した移動サー ビスや物流サービスに関する取り組みが行われていた 6 。 特に中山間地域などで
48
第三章 現在の自動運転車を取り巻く環境
図2 「地域新MaaS創出推進事業」の実施状況 出典:「経済産業省 令和4年度スマートモビリティチャレンジの方向性」 より筆者が作成
は高齢化が他地域と比較して進行しており、また公共交通の衰退によって手軽に買 い物へ行くことが困難になったり、トラックの運転手不足により物資が届きにくく なるなどの現象が生じている。このような状況下において人と物の輸送を、中山間 地域などで中心的な役割を果たすことの多い道の駅を活用して事業検証が行われて いる。
一方で都道府県などの自治体が独自におこなっている実証実験もあり、愛知県で は、2022年に「イノベーション創出に向けた自動運転の活用」をテーマとした、「移 動時間に付加価値を与える車室空間の検証」が行われている 7 。都心部においては、 地方と比べても付加価値に対するニーズが高いと想定されており、移動の目的や意 味を拡張する体験の検証が行われている。
以上のように地域ごとに異なるニーズや置かれた環境に対して、自動運転車だけ にとどまらず、既存のサービスを拡張したMaaS(Mobility as a Service)などの 事業と連携しながら事業性・社会受容性・体制などの検証が行われている。
49
50 第三章 現在の自動運転車を取り巻く環境
今後の方針について
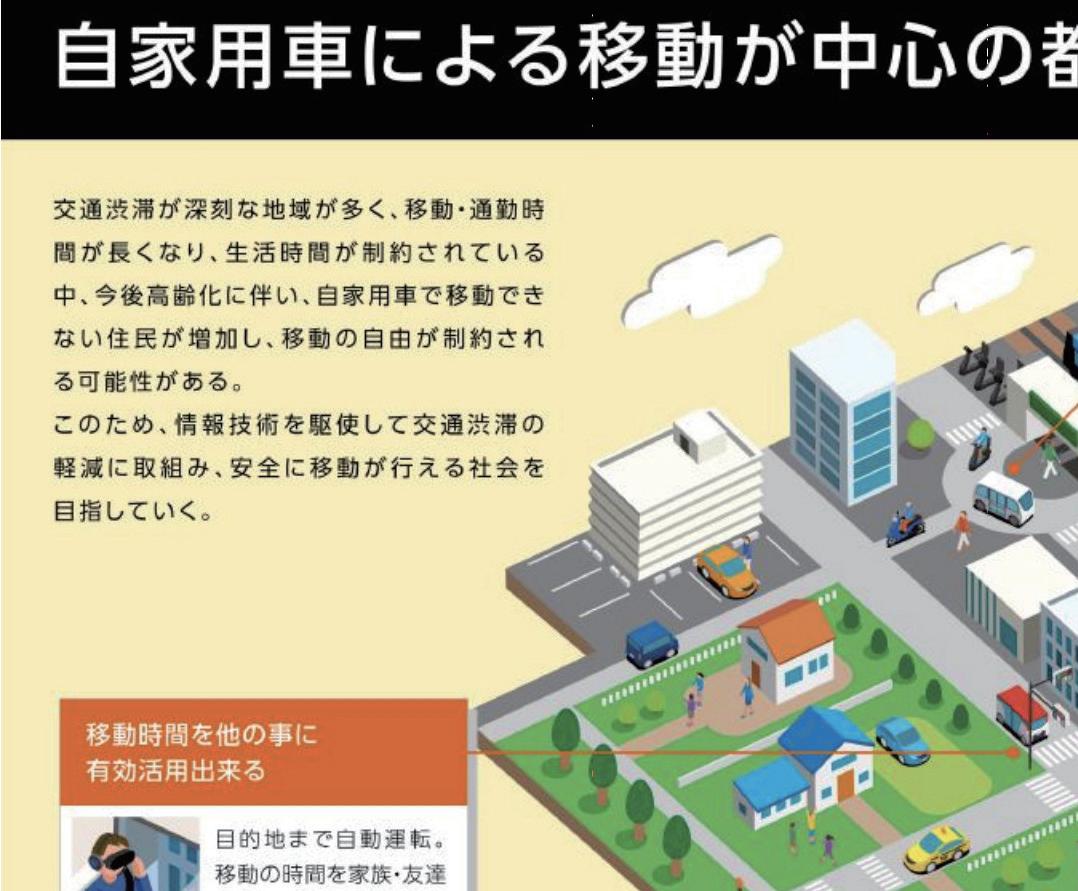
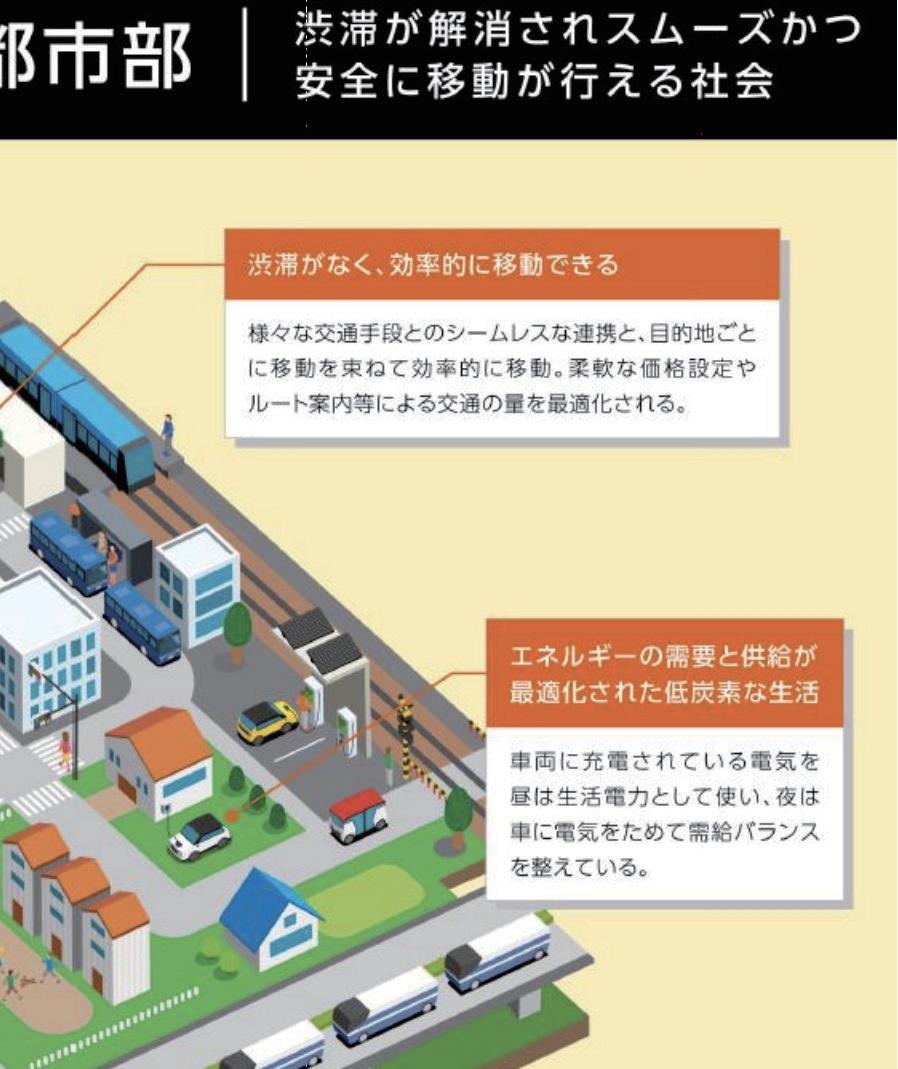
図3 ロードマップによる都市部へのビジョン 出典:官民ITS構想・ロードマップ
3.1.3
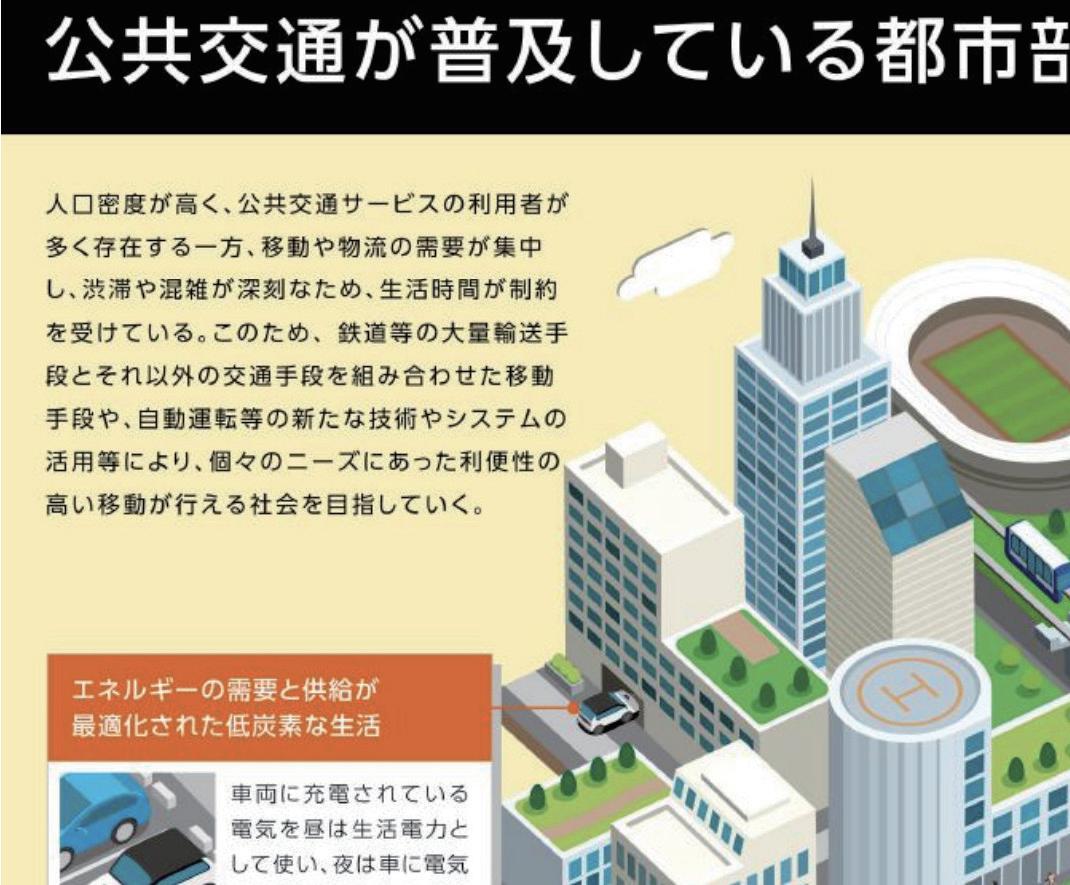
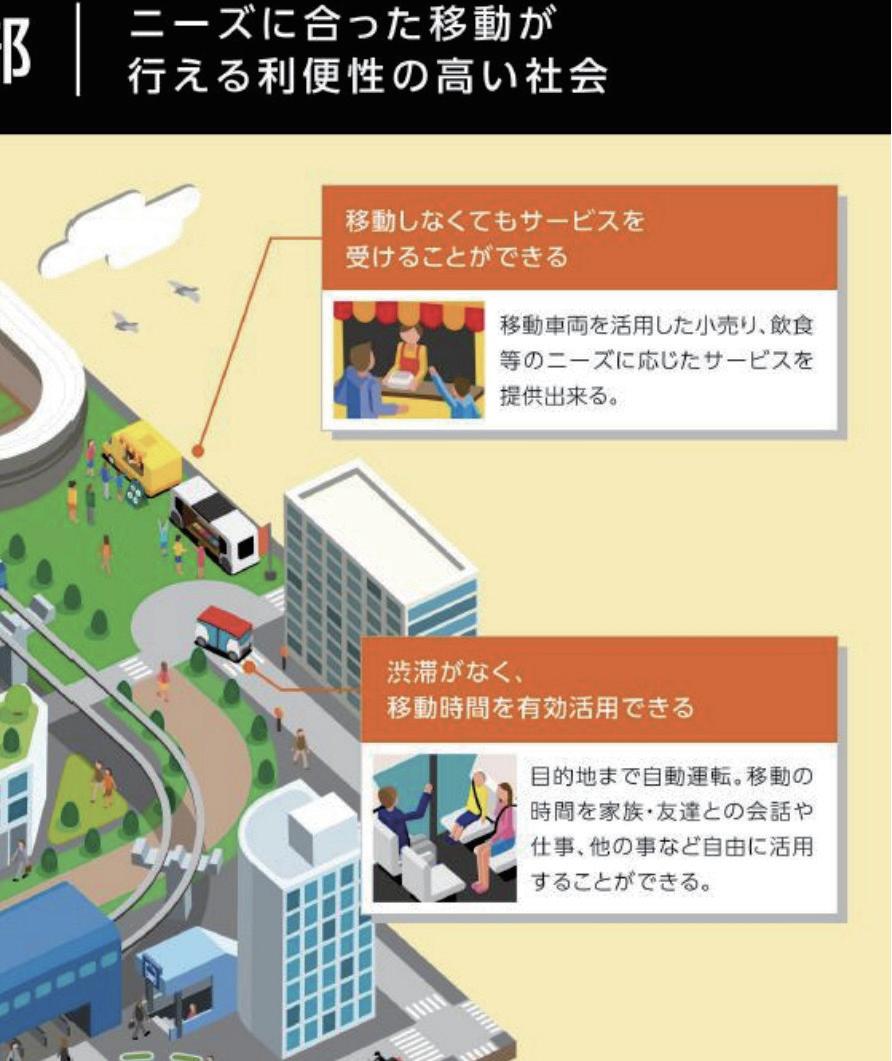
またロードマップでは、地域性に着目した戦略も示されており、「地方部」と「自 動車中心の都市部」そして「公共交通が普及している都市部」の3つの地域に分 類された、2030年までの将来像が示されている。この中で取り上げられている「地 方部」での「移動しなくてもサービスを受けることができる」ことや「自動車中心 の都市部」における「移動時間を他のことに有効活用できる」、「公共交通が普及し ている都市部」での「小売・飲食などのサービス提供車両」などの内容が本研究で 検証する内容と一致していると筆者は考える。
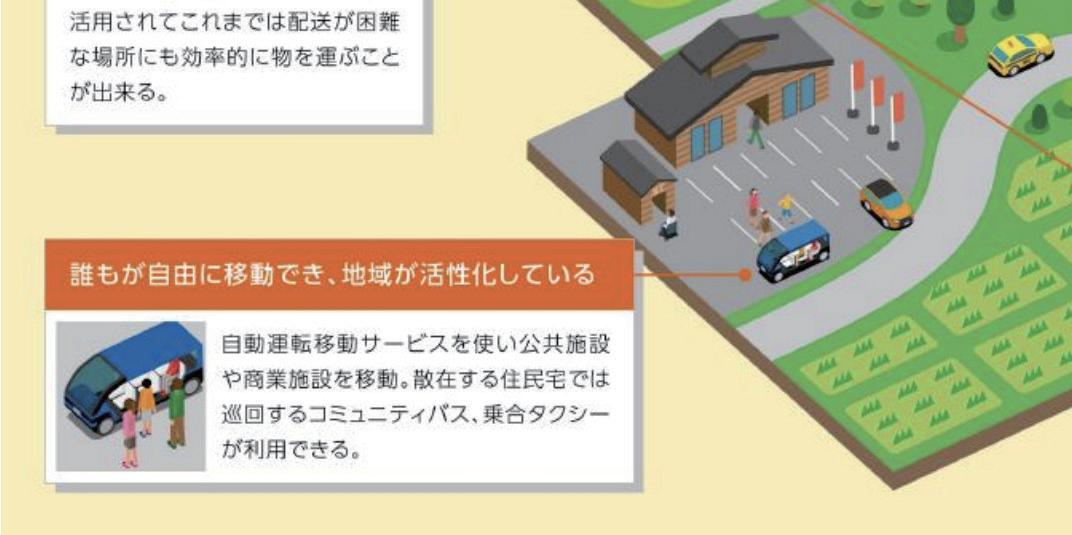
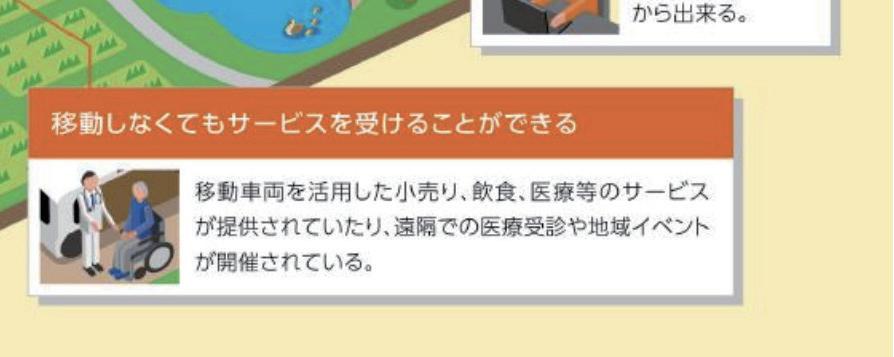
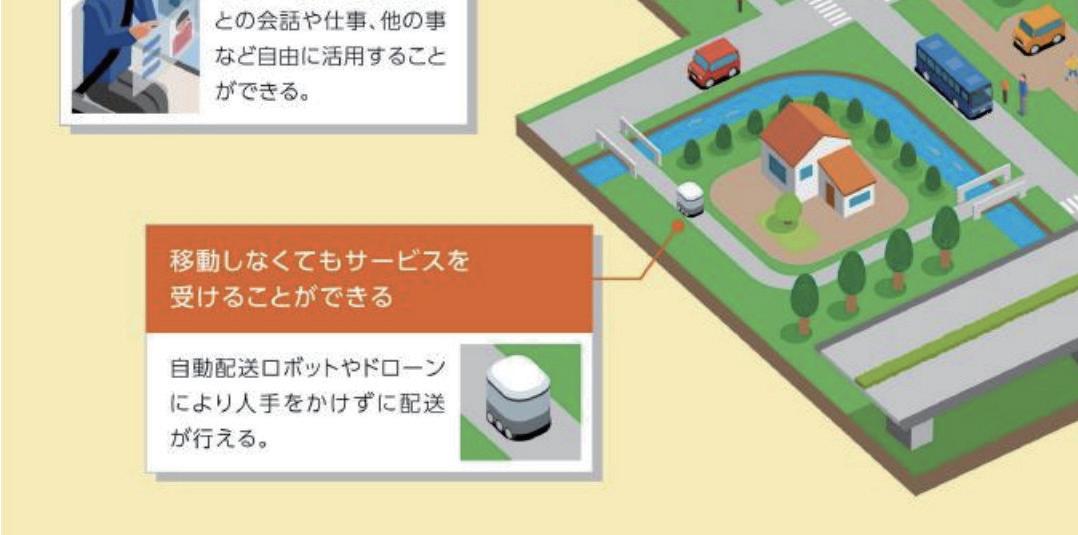

51 図4 ロードマップによる都市部へのビジョン 出典:官民ITS構想・ロードマップ 図5 ロードマップにおける地方部へのビジョン 出典:官民ITS構想・ロードマップ
大カテゴリ 施策① 施策② 施策③ (1)多様な交通モードの充実によるコ
ンパクトでスマートな都市の実現
既存サービスと新たなサービス を駆使した地域公共交通の再編 による利便性の向上
主要な駅を中心とした先端技術 の普及を見込んだ駅まち空間の 再構築
自動運転技術やIoTを活用した 地域内における物流の効率化
先端技術を活用した人中心の利 用しやすい駅前広場の整備
(3)道路空間の再分配により、車と人 の適切な分担や中心部のにぎわい空間
5Gを活用した信号機の高度化 等、先端技術を取り込んだ交通 安全施設の社会実装
地域ニーズに応えられる新たな モビリティを活用した交通サー ビスの導入 (2)鉄道ストックを基軸とし、新たな モビリティやMaaSなどの先端技術 を活用した人中心のモビリティネット ワーク構築によるスムーズな移動の実 現
東京都からも同様な2040年代に向けたまちづくりの構想が検討されている 8 。 具体的には表○に示されたような4つの領域であり、(1)多様な交通モードの 充実によるコンパクトでスマートな都市の実現(2)鉄道ストックを基軸とし、新 たなモビリティやMaaSなどの先端技術を活用した人中心のモビリティネットワー ク構築によるスムーズな移動の実現(3)道路空間の再分配により、車と人の適切 な分担や中心部のにぎわい空間創出の実現(4)ポストコロナを見据えた新しい日 常が定着したまちづくりの実現などが挙げられている。特に東京においては、電車 や道路などの交通インフラが他地域と比較して充実しているため、このような既存 のインフラをどのように更新していくのかということに対して比重が置かれてい る。 また道路のあり方については国土交通省によるビジョン「2040 年、道路の景色 が変わる 9
52
第三章 現在の自動運転車を取り巻く環境
表2 東京都による重点取り組み領域とその施策
」が提言されている。 この提言の中では、自動運転バスや小型モビリティなどさまざまな交通モードの 接続・乗換拠点(モビリティ・ハブ)が道路ネットワークに階層的に整備を行って いき、さらに路側マネジメントなどの曜日や時間帯に応じて可変をする道路と沿道 民地の運用方法など、これまでの自動車が走行するために定義されていた道路とい う概念を超えた内容について言及がされている。
出典:東京都:自動運転社会を見据えた都市づくりのあり方 より筆者が作成
創出の実現 道路ネットワークの整備と自動 運転車の普及により余裕の生じ た車道部分を活用した道路空間 のリメイク 中心部や駅の周辺における歩行 者中心のにぎわい空間の創出 カーブサイドの利活用を見直 し、道路空間の稼働率を向上 (4)ポストコロナを見据えた新しい日 常が定着したまちづくりの実現 安全性・快適性・利便性を備え た駅まち空間の一体的な整備 自転車利用や歩行者の増加を見 込んだ自転車利用環境や歩行者 空間の整備 ICTを活用し、バス等の混雑 状況などの運行情報の見える化 を推進


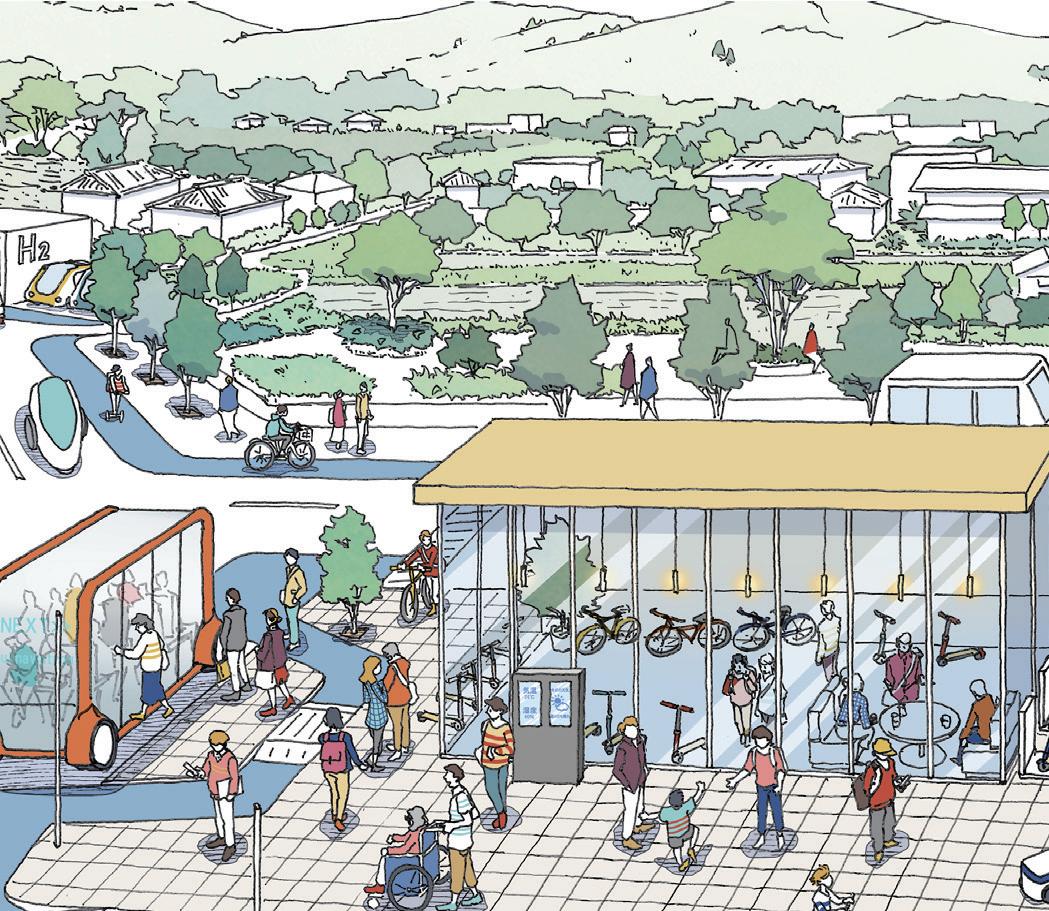


53 図6 「モビリティハブの様子 出典:国土交通省 2040年、道路の景色が変わる 図7 路側マネジメントの様子 出典:国土交通省 2040年、道路の景色が変わる
3.2.1 課題の全体像
前節で自動運転の導入に向けた国内での取り組みについて整理を行なった。本節 では、一般的に述べられている自動運転車が抱えているか課題について、レビュー 論文を参考にしながらその課題について網羅的に取り上げる。この操作を通じて得 た、自動運転を導入した際に起こりうる重要な要素を次章以降で行うシミュレー ションのパラメーターとして活用する。
自動運転の普及に対する要件や、その影響に関するレビュー論文としては、 Nacerら(2021)やNarayananら(2020)、Nunoら(2018)、Fábioら(2018) などが挙げられる。またLitman(2022)も統合的な目線でのレポートを発表して いる。
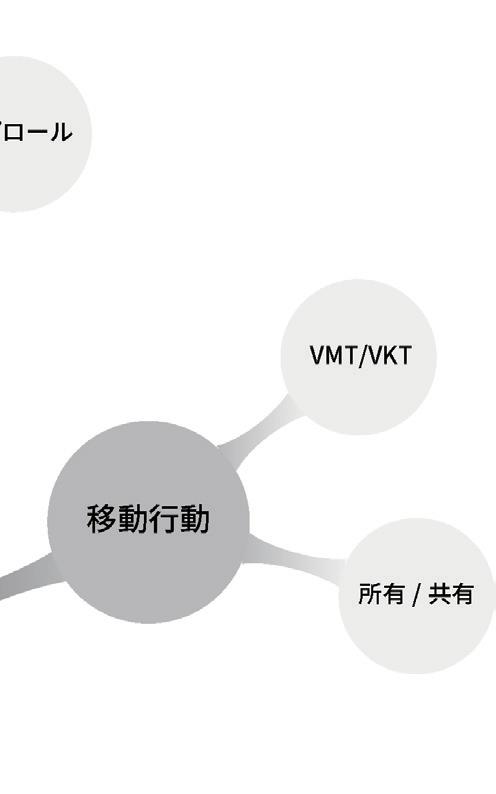
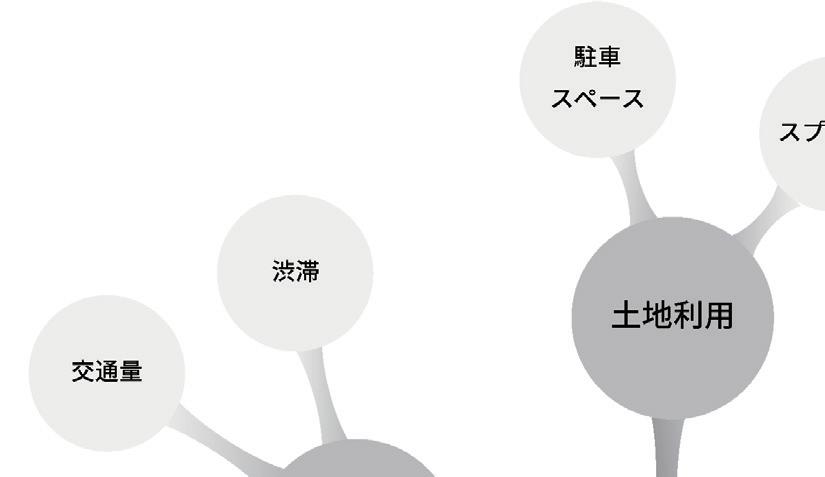
Nacerら(2021)は自動運転の導入にあたり、どのような障害が発生する可能 性があるかについて混合研究法を用いて分析を行った。2つのメインテーマとサブ テーマを扱い、(1)利用者・政府の視点では「利用者の受容性と行動」「安全性」「法 規制」が挙げられ(2)情報とICTでは「コンピューターソフトウェアとハードウェ ア」「コミュニケーションシステムV2X」「高精度地図」などが挙げられている。 Narayananら(2020)は共有型自動運転車(SAV)に着目して、網羅的に 「交通&安全性(Traffic&Saftey)」「交通行動」「経済」「輸送供給(Transport supply)」「土地利用」「環境」「ガバナンス」の観点について影響の評価を行った。 Nunoら(2018)は自動運転がどのような影響を与えるか「社会経済」「エネルギー」 「安全性」「渋滞」「土地利用」の5つの観点から考察を行った。車両の所有や運転 者の行動変化、エネルギー削減、交通事故の削減、保険料の安価化、駐車スペース
54
3.2
第三章 現在の自動運転車を取り巻く環境
自動運転車が抱える課題
の見直しなどが具体的な内容として描かれている。 Fábioら(2018)は自動運転が都市での生活を馬車から車に変化した際と同じ ように変える可能性があるとし、その変化を検討するため「車両の形状」「道路の 混雑度」「駐車スペースの増減」「都市のスプロール化」「道路インフラの必要性」 などの5つの観点から考察を行った。
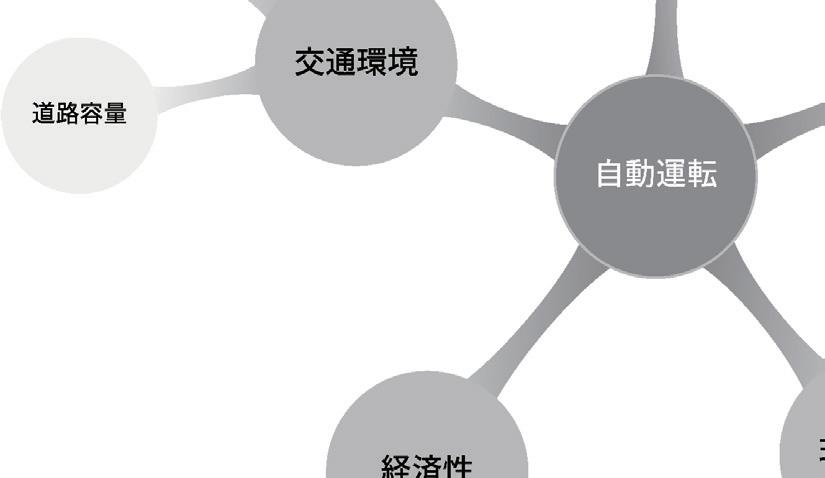
これらの視点を統合し、技術開発などの内容を除いた、5つの領域「交通環境」「土 地利用」「移動行動」「環境問題」「経済性」に着目をして整理を行い、その具体的 な課題点について既往研究からレビューを行う。 3.2.2 詳細な議論 安全性 安全性については自動運転の導入により、事故が減少すると一般的には考えられ ており、Fagnant & Kockelman(2015)らは飲酒運転や不注意などから発生する 死亡事故などの影響から分析を行い40%、Keeney(2017)は航空業界の自動化に よる影響を参照しながら80%の事故減少を予測している。 交通量 交通量に関しては、Litman(2018)では地方や郊外などにおいて増加し、一方
55
で都市部においては減少するとの予測を導いた。またMartinez and Viegas(2017) やAlazzawi ら(2018)は、ライドシェアリング型の自動運転を行うことにより、 交通量を削減することができるとしている。具体的には、前述のAlazzawi ら(2018) の結果を見ると少なくとも50%の交通量を削減できるとしている。またSalazar ら(2018)はカーシェアリング型のサービスシステムであったとしても、公共交 通と組み合わせることにより交通を削減できるとしている。このほかに、Simoni
図8 自動運転の代表的課題一覧 Narayananら(2020)を元に筆者が独自作成
ら(2019)交通渋滞は渋滞時の費用を導入することで抑制することができるとし ている。 また自動運転の導入により、車両間隔をはじめとした交通の制御がより円滑にな ることにより、特に高速道路では道路容量の増加が見込まれており、Friedrich ら (2015)は80%、Tientrakool(2011)は40%から273%の増加と測定した。ま た自動運転車の普及率との関係性も示されており、Mena-Orejaら(2018)は自 動運転車の普及率が20%に達した際、そこから道路容量の増加が見込まれるとし ている。
コスト コストの予測については、$0.19/kmから$0.30/km前後のものが多く見ら れる(Bauerら, 2018; Chenら, 2016; Walker & Marchau, 2017)。Nunes &Hernandez(2020)はライドシェア型の自動運転では$0.13/kmから$0.25/km 程度の料金になるとしている。またLitman(2022)では技術発展により最終的には $0.38/kmから$0.6/km程度で利用ができる可能性を示し、これらの費用は人間が 運転するタクシーより安く、個人の車や公共交通での運賃よりは高いものとしてい る。
駐車場
将来の駐車場は計画前述の道路容量や車両数の変化に伴いさまざまな形で、自 動運転車の影響を受けるとされている。González-González& Nogués & Stead (2020)は今後の政策シナリオとして駐車場の再配置のあり方などを検討し、 Zhang & Kaidi Wang(2020)は特に都心部にて2030年以降、20%以上の駐車場 の需要が減ると予測した。そのほか駐車スペースの変化については、Kondorら (2018)、Langら(2018)、Vleugel& Bal(2018)などが50%の削減を見込むとし ている。
56
第三章 現在の自動運転車を取り巻く環境
VMT/VKT
Miles Traveled/Vehicle
traveled
状況よりも増加する傾向として考えられている(Alam & Habib, 2018; Bischoff & Maciejewski, 2016)。この最大の要因として、空車での移動が増加すること が挙げられている。Taiebatら(2019)は自動運転車が平均世帯の車両移動を 2-47%増加させ、特に高所得層による増加が最も大きいと予測している。一方で Rossiら(2018)は際立った渋滞を発生させずに空車の移動を行うことが可能であ るとしている。またLokhandwala & Cai(2018)はライドシェア型のサービスで はVMT/VKTを減少させることが可能であるとしている。
走行時間を計測するVMT/VKT(Vehicle
kilometers
)についても課題が投げかけられている。VMT/VKTは一般的に現在の
渋滞の発生可能性については、Ratti & Biderman(2017)は共有型の自動運転 車を1台導入することにより、9台から13台の車両を交通から取り除くことがで きるとしている。交通量や道路容量などについて楽観的な視点での議論が上記のよ うに多くなされているが、一方で新たな渋滞が発生する可能性も示唆されており、 Adam(2019)はVMTや低速で走ることでコストが安くなるため、交通状況が悪 化する可能性を示唆している。ゲーム理論と交通シミュレーションモデルを組み合 わせた予測では、2000台の車両が走行することで、全体の交通速度を時速3.2キ ロメートル未満に鈍化するなどし、渋滞時の追加費用を検討する必要を示した。 都市のスプロール化
Gelauff ら (2017) やSoteropoulos ら(2018)は自動運転車の導入がスプロール 化(urbanisation)をもたらすとしている。一方でZhang & Guhathakurta (2018) はより詳細なシミュレーションモデルと居住地選択モデルを組み合わせた分析を行 い、その結果として、自動運転の導入は無計画なスプロール化をもたらさないとし ている。一方で、Nunesら(2021)は郊外や地方のエリアにおいては、年間車両 走行距離が増加する可能性が高いなど、地域によって交通の質がさらに変化する可 能性を示唆している。 エネルギー排出量の削減
主に自動運転車が電気自動車(EV)を使用することにより、エネルギー消費量 と排出量を共に抑制できるという考え方が見られている。一方でLokhandwala& Cai(2018)は排出量を抜本的に解決するにはライドシェアリングの必要性を唱え ている。またSalazarら(2018)では、公共交通と自動運転車を組み合わせて利 用することで抑制ができるとしている。
4章以降のシミュレーションにおいては、上記の中から施設配置やサービス提供 範囲などに対して影響を与える可能性がある3つの領域に着目し、「経済」につい ては利用者の便益を時間価値に着目することで算出し、「道路」については渋滞発 生の可能性について施設機能を代替するために必要な車両数から考察し、そして最 後に「土地利用」については、どのようなエリアにてサービスが提供される可能性 が生まれるかについて検討する。
57 渋滞
1. TIER IV:公共政策から見る自動運転, https://medium.com/tier-iv-tech-blog/公共政策か ら見る自動運転-もはや-運転-ではない-改正道交法の特定自動運行制度-レベル4-につ いて-4cea9ae9118d(2023/1/4最終閲覧)
2. SAE (2016). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. J3016.
3. スマートモビリティチャレンジ, https://www.mobilitychallenge.go.jp/(2022/12/24最終 閲覧)
4. 経済産業省:「自動運転レベル4等先進モビリティサービス研究開発・社会実装プロジェク ト」について, https://www.meti.go.jp/policy/mono_info_service/mono/automobile/ Automated-driving/RoADtotheL4.html(2022/12/24最終閲覧)
5. スマートモビリティチャレンジ2021, https://www.meti.go.jp/shingikai/mono_info_service/smart_mobility_challenge/pdf/20220405_01_s01.pdf(2022/12/24最終閲覧)
6. 戦略的イノベーション創造プログラム:SIP第2期自動運転中間成果報告書, https://www. sip-adus.go.jp/rd/rd_page03.php(2022/12/25最終閲覧)
7. 愛知県:名駅南~栄南地区における自動運転実証実験の実施について, https://www.pref. aichi.jp/press-release/jidounten-nagoya-2022.html(2022/12/24最終閲覧)
8. 東京都:自動運転社会を見据えた都市づくりのあり方, 2022, https://www.toshiseibi.metro.tokyo.lg.jp/bunyabetsu/kotsu_butsuryu/pdf/jido_unten_honbun_all.pdf(2023/1/4 最終閲覧)
9. 国土交通省:2040年、道路の景色が変わる,2020, https://www.mlit.go.jp/road/vision/ pdf/01.pdf(2022/12/24最終閲覧)
• Nacer Eddine Bezai, Benachir Medjdoub, Amin AI-Habaibeh, Moulay Larbi Chalal, Fodil Fadli: Future cities and autonomous vehicles: analysis of the barriers to full adoption, Energy and Built Environment2, pp65-81, 2021
• Santhanakrishnan Narayanan, Emmanouil Chaniotakis, Constantinos Antoniou: Shared autonomous vehicle services: A comprehensive review, Transportation Re-
58 参考文献 第三章 現在の自動運転車を取り巻く環境
search Part C, 111, pp255-293, 2020
• Nuno Sousa, Arminda Almedia, Joao Coutinho-Rodrigues, Eduardo Natividade-jesus, Dawn of autonomous vehicles: reveiw and challenges ahead, Municipal Engiineer, Volume171 Issue ME1, pp3-14, 2018
• Fábio Duarte & Carlo Ratti, The Impact of Autonomous Vehicles on Cities: A Review, Journal of Urban Technology, 25:4, pp3-18, 2018
• Todd Litman, Autonomous Vehicle Implementation Predictions: Implications for Transport Planning, 2022, https://www.vtpi.org/avip.pdf
• Daniel J. Fagnant , Kara Kockelman, Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations, Transportation Research Part A: Policy and Practice, Vol77, P167-181, 2015
• Tasha Keeney, Mobility-As-A-Service:Why Self-Driving Cars Could Change Everything, 2017, https://research.ark-invest.com/self-driving-cars-white-paper
• Todd Litman, Autonomous Vehicle Implementation Predictions, 2018
• L.M. Martinez, Jose Viegas, Assessing the impacts of deploying a shared self-driving urban mobility system: An agent-based model applied to the city of Lisbon, Portugal, International Journal of Transportation Science and Technology, Vol.6, Issue1, P1327, 2017
• Sabina Alazzawi, Mathias Hummel, Pascal Kordt, Thorsten Sickenberger, Christian Wieseotte , Oliver Wohak, Simulating the Impact of Shared, Autonomous Vehicles on Urban Mobility – a Case Study of Milan, EPiC Series in Engineering, Vol2, p94-110, 2018
• Mauro Salazar, Federico Rossi, Maximilian Schiffer, Christopher H. Onder, Marco Pavone, On the Interaction between Autonomous Mobility-on-Demand and Public
59
Transportation Systems, 21st International Conference on Intelligent Transportation Systems, p2262-2269, 2018
• Simoni, M. D., Kockelman, K. M., Gurumurthy, K. M., & Bischoff, J.,Congestion pricing in a world of self-driving vehicles: An analysis of different strategies in alternative future scenarios., Transportation Research Part C: Emerging Technologies, 98, 167–185, 2019
• Simoni, M. D., Kockelman, K. M., Gurumurthy, K. M., & Bischoff, J.,Congestion pricing in a world of self-driving vehicles: An analysis of different strategies in alternative future scenarios., Transportation Research Part C: Emerging Technologies, 98, 167–185, 2019
• Tientrakool, P., Ho, Y.-C., Maxemchuk, N.F. , Highway capacity benefits from using vehicle-to-vehicle communication and sensors for collision avoidance, IEEE Vehicular Technology Conference , Piscataway, NJ, pp. 1–5, 2011
• Jesús Mena-Oreja; Javier Gozalvez, On the Impact of Platooning Maneuvers on Traffic, IEEE International Conference on Vehicular Electronics and Safety, p1-4, 2018
• Bauer, G.S., Greenblatt, J.B., Gerke, B.F., Cost, energy, and environmental impact of automated electric taxi fleets in Manhattan. Environ. Sci. Technol. 52, p4920–4928,2018
• Chen, T.D., Kockelman, K.M., Hanna, J.P., Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A: Policy Practice 94, 2016
• Walker, W.E., Marchau, V.A., Dynamic adaptive policymaking for the sustainable city: the case of automated taxis. Int. J. Transp. Sci. Technol. 6, p1–12, 2017
• AshleyNunes, Kristen D.Hernandez, Autonomous taxis & public health: High cost or high opportunity cost?, Transportation Research PartA: Policy and Practice, Vol138,
60 参考文献 第三章 現在の自動運転車を取り巻く環境
p28-36, 2020
• González-González, Nogués and Stead, Parking futures: Preparing European cities for the advent of automated vehicles, Land Use Policy, Vol.91, 2020
• Zhang and Kaidi Wang, Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta, Land Use Policy, Vol.91, 2020
• Kakali Basak, Paolo Santi, Kakali Basak, Xiaohu Zhang, Carlo Ratti, Large-scale estimation of parking requirements for autonomous mobility on demand systems, 2018
• Lang, N.S.L., Ruessmann, M., Collie, B.E., Wegscheider, A.K., Moavenzadeh, J., Loane, M. Reshaping urban mobility with autonomous vehicles: Lessons from the city of Boston., 2018 http://www3.weforum.org/docs/WEF_Reshaping_Urban_Mobility_with_ Autonomous_Vehicles_2018.pdf
• Vleugel, J.M., Bal, F., More space and improved living conditions in cities with autonomous vehicles. Int. J. Des. Nat. Ecodynamics 12, p505–515, 2018
• Alam, M.J., Habib, M.A., Investigation of the impacts of shared autonomous vehicle operation in Halifax, Canada, using a dynamic traffic microsimulation model. Procedia Comput. Sci. 130, p496–503,2018
• Bischoff, J., Maciejewski, M., Autonomous taxicabs in Berlin – a spatiotemporal analysis of service performance. Transp. Res. Procedia 19, p176–18, 2016
• Morteza Taiebat, Samuel Stolper, Ming Xu, Forecasting the Impact of Connected and Automated Vehicles on Energy Use: A Microeconomic Study of Induced Travel and Energy Rebound, Applied Energy, Vol247, IssueC, p297-308, 2019
• Rossi, F., Zhang, R., Hindy, Y., Pavone, M., Routing autonomous vehicles in congested transportation networks: Structural properties and coordination algorithms. Autonomous Robots 42, p1427–1442, 2018
61
• Lokhandwala, M., Cai, H., Dynamic ride sharing using traditional taxis and shared autonomous taxis: a case study of New York City. Transp. Res. Part C: Emerg. Technol. 97, p45–60, 2018
• Carlo Ratti, Assaf Biderman, From Parking Lot to Paradise, Scientific American 317, 1, p54-59, 2017
• AdamMillard-Ball, The autonomous vehicle parking problem, Transport Policy, Vol75, p99-108, 2019
• Gelauff, G., Ossokina, I., Teulings, C. , Spatial effects of automated driving: Dispersion, concentration or both?, 2017
• Soteropoulos, A., Berger, M., Ciari, F., Impacts of automated vehicles on travel behaviour and land use: an international review of modelling studies. Transp. Rev. 94, p1–21, 2018
• Wenwen Zhang , Subhrajit Guhathakurta, Residential Location Choice in the Era of Shared Autonomous Vehicles, Journal of Planning Education and Research, Vol41, Issue2, p135-148, 2018
• Ashley Nunes, Laurena Huh, Nicole Kagan, Richard B Freeman, “Estimating the Energy Impact of Electric, Autonomous Taxis: Evidence from a Select Market,” Environmental Research Letters,Vol16, 2021
• Mustafa Lokhandwala, Hua Cai, Dynamic ride sharing using traditional taxis and shared autonomous taxis: A case study of NYC, Transportation Research PartC Emerging Technologies,97, p45-60, 2018
• Salazar, M., Rossi, F., Schiffer, M., Onder, C.H., Pavone, M., On the interaction between autonomous mobility-on-demand and public transportation systems. In: 2018 International Conference on Intelligent Transportation Systems (ITSC), pp. 2262–2269, 2018
62 参考文献 第三章 現在の自動運転車を取り巻く環境
63
64 第四章 施設機能の代替を可能にするサービスと車両数の算出
目的:
4章では自動運転車が既存の施設機能を代替する場合、どのようなサービスが適 当であるか検証する。これらを明らかにするため、マルチエージェントシミュレー ションツールAnyLogic(ver 8.7.7)を用いて、自動運転車が移動し、利用者が自 宅でサービス依頼・享受を行う「自動運転型」と、利用者が自宅から施設に移動しサー ビス享受をする「施設型」の比較を行う。また「自動運転型」と「施設型」の比較 を行うにあたり、図○のようなシミュレーション環境設定を行う。4章におけるサー ビス適正の算出については、需要パターンによる待ち時間の変化と、そのサービス を行うために必要な車両数にどの程度の現実性があるのかを検討する。また4章に 続き、5章においてはサービスの提供範囲を新たなパラメータとして導入し、これ らによって導出された結果を利用者の待ち時間や移動時間の時間価値(以下VOT と呼称)を考慮した時間コストと、車両利用による金銭コストを足し合わせた一般 化費用を用いることでサービス提供の適正範囲を推定する。
また4章・5章の内容は、TOYOTAのe-paltteなどの車両に機材と作業空間を
65
搭載した新たなタイプの自動運転車(機能搭載型自動運転車)を念頭におきなが ら、移動販売車やバスの一部空間を改造を施した、現在実証実験が推進されている MaaS(Mobility as a Service)にも適用することのできるシミュレーションである。 第4章: 施設機能の代替を 可能にするサービ スと車両数の算出
自動運転車の普及要因 紀伊ら 1 はどのような要因によって移動を目的とした自動運転車が普及するのか を、車両価格や車両数、提供範囲の関係性を数式化した上で、シミュレーションを 行うことで明らかにした。この研究では車両価格が高くても都市半径が小さい場合 に普及率が高まることが示唆された。松中ら 2 はどのような人口の都市において共 有型完全自動運転車の普及による燃料費や待ち時間、駐車場の費用などの社会的便 益へ影響があるのかをシミュレーションした。その結果、全ての自家用車が共有型 自動運転車に変わった場合、人口30万人の都市においては、必要な車両数が84% 減少、必要な駐車場面積が71%減少し、1日で2500万円の便益が生じるとしている。
時間価値
また、利用者の便益に注目し、既存の自動車と自動運転車における移動時間の時 間価値(時間の変化に対する支払意思額 3 :Value of Time、以下VOTと略称)を 比較することにより、自動運転車の導入のコストとメリットの精緻な把握が可能に なる。このVOTに着目した研究がFelixら 4 によって行われ、自動運転車による交 通時間節約価値(以下VTTS:Value of Travel Time Saving, 交通プロジェクトに よる時間消費制約の緩和効果,いわゆる時間短縮効果を金銭換算したもの11))を 算出した。Felixらは個人所有の自動運転車は既存の自動車に比べて31%VTTS可 能性があると言及している。またAxhausenらの研究 5 によると業務時間内におけ
66
4.1 既往研究
第四章 施設機能の代替を可能にするサービスと車両数の算出
よるVOTの優劣は見られない。一方で近年では自動運転車と既存の自動車の間に VOTは大きな差はないという指摘もSingleton 6 によってなされている。この要因 として、自動運転サービスの導入初期における自動運転車の車内活動は既存の自動 車と比較して大きく乖離することはなく、また生産的活動を行うには移動時間が短 すぎるのではないかと主張している。
るVTTSの効果は高所得者の場合により大きく、非業務時間においては所得差に
都市構造
都市構造の違いによる自動運転車の有用性の差異については、東ら 7 がシェア型 自動運転車の導入時に、都市機能を集約させることでライドシェア成立割合を増や し運行効率を高められることを明らかにしている。一方で、必要な車両数や移動時 間は増加しており、加えて交通効率はエリアの都市構造により異なるとしている。 また冨岡ら 8 は、デマンド交通などのMaaS(Mobility as a Service)が普及する ためには、どのような人口分布の地域である良いか検証を行なった。この結果、運 行効率を考慮すると中心市街地においては同心円状、郊外においてはコリドー状の 人口集約が行われると望ましいことを明らかとした。Caoら 9 は”Stall-economy” と呼ぶ、屋台のような店舗型自動運転車の配置エリアなどのシミュレーションを行 い、サービス提供範囲と屋台に出会うまでの利用者の距離が重要な要素であるとし ている。
機能搭載型自動運転車
機能搭載型自動運転車の導入可能性については、医療サービスに注目したアン ケート調査が御手洗ら(2020) 10 によって行われた。この研究では居住者に対して現 状の利用している施設の立地地域と理想的なサービス利用地域についてアンケート を行い、その乖離度から機能搭載型自動運転車の導入可能性のある地域について検 討している。また個人の利用属性から、どのような理由で機能搭載型自動運転車を 利用するのかというアンケート分析が御手洗ら(2021) 11 によって行われている。こ の研究では、機能搭載型自動運転車の時間的な柔軟性が利用促進要因となっている 一方、施設に対しては、信頼度や施設へのアクセシビリティなど影響を与える要因 が異なることが示された。
67
移動販売車 またドライバーが運転することにより自動運転で見込まれるサービスと同様な価 値提供を行なっている移動販売車については、どの程度のサービス規模と地域であ ると事業が成立するのか、ハフモデルを用いた研究が谷本ら 12 によって行われてい る。この研究では、主に中山間地域における小規模店舗が閉店した場合、どの程度 移動販売車の利用者が増えるか検討を行い、特に品揃えを増やした場合に効果が見 込まれるとしている。また、移動販売車がどのような場所において停車をし、販売 を行なっているのか、その停車空間に着目した研究が秋月ら 13 によって行われてい る。この研究では、移動販売は物の物販だけでなく、副次的な効果としてコミュニ
ケーションの誘発するハブとして利用されてたり、また周囲の関係者との調整が必 要なことから、完全な無人化・オンデマンド型がスムーズに導入されることは難し いとしている。 住宅機能の代替と都市空間構造
機能の代替と空間構造の分析については、鈴木ら 14 が住宅の機能を補完するファ ミリーレストランやコンビニエンスストアの立地について人と物の消費エネルギー に着目し分析を行った。この結果、これらの施設に徒歩で行くことのできる領域 内においては単身世帯と15-30歳までの人口割合が他の世代に比べて多いことがわ かった。
以上のように移動を目的とした自動運転車については提供範囲や車両価格から導 き出される普及要因やVOTに考慮した利用者に対するうコストとメリットの検討 が行われた。また機能搭載型自動運転車については、導入意向に関するアンケート 調査を用いた導入地域の検討や個人属性の傾向調査が行われた。一方で自動運転車 による既存施設のサービス機能代替を前提とした車両数の検討や、VOTに着目し たサービス類型による需要パターンから生じる利用者に対する便益評価とサービス 提供範囲に関する分析は行われていない。そこで本章では、自動運転車のサービス を受けるための待ち時間を推定し、現在の自宅から施設への往復移動時間と比較す ることで代替を可能にする車両数やサービスの特徴を考察する。さらにタクシーな どの車両数と比較を行うことで、このようなサービスが道路環境の観点から現実的 であるのか検討する。
第四章 施設機能の代替を可能にするサービスと車両数の算出
68
69
4.2.1 シミュレーション概要
「自動運転型」と「施設型」の比較を行うために図1に示す手順でシミュレーショ ンを行う。「自動運転型」においては地域・サービス・車両数を変数として与えた 上で、待ち時間の算出を行い、また「施設型」においては地域を変数として与えた 上で、施設までの往復移動時間を算出する。これらの計測結果から、「施設型」で の移動時間と同等の「自動運転型」による自宅での待ち時間に必要となる車両数を 算出する。

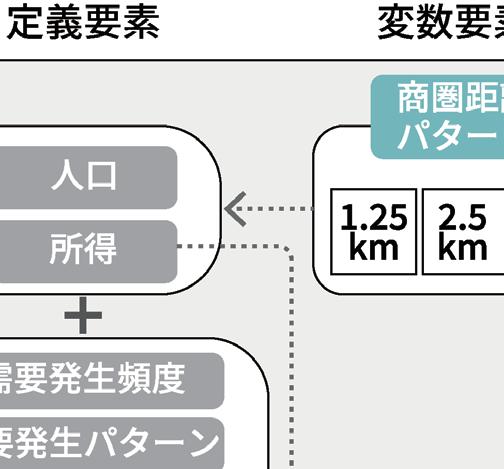
シミュレーションはマルチエージェントシミュレーションツールAnyLogic(ver 8.7.7)を使用する。シミュレーション計測時間は24時間とし、1時間ごとの需要 量変化を考慮する。また処理時間を短縮するため、シミュレーションの人口は実 際の人口の1/100とする。シミュレーション範囲は徒歩での移動圏域である一辺 2.5kmの正方形領域とする。利用者は正方形領域内に設定した80.5m間隔の、利 用者数よりも多く設定された格子点に均一に分布させる。この格子点上に需要が発 図1 シミュレーション全体構成

第四章 施設機能の代替を可能にするサービスと車両数の算出
70
4.2
シミュレーション環境設定
生する利用者の住宅があるものとし、以下住宅と呼称する。使用データは表1の通 りである。
「自動運転型」ではシミュレーション開始時に、正方形領域の中心に存在する施 設より車両が発車するものとし、領域外との車両のやり取りはないものとする。ま た需要は後述の一人一人の利用者について発生する、所与の「時刻ごとの需要発生 確率」に基づくものとする。
「施設型」の場合においては、正方形領域の中心に施設が集まっていることとし、 単一の施設、複数の施設が立地する場合にも、中心に位置する1つの場所にまとまっ ているものと仮定する。
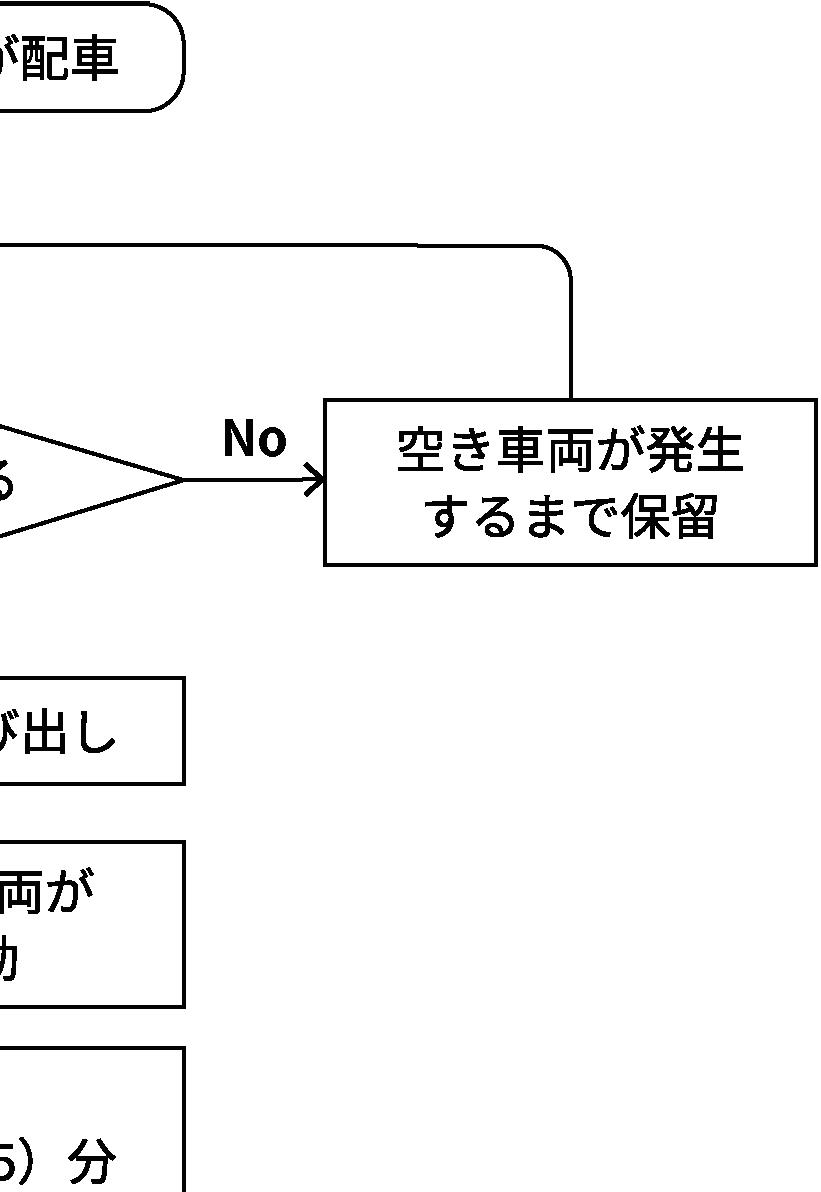
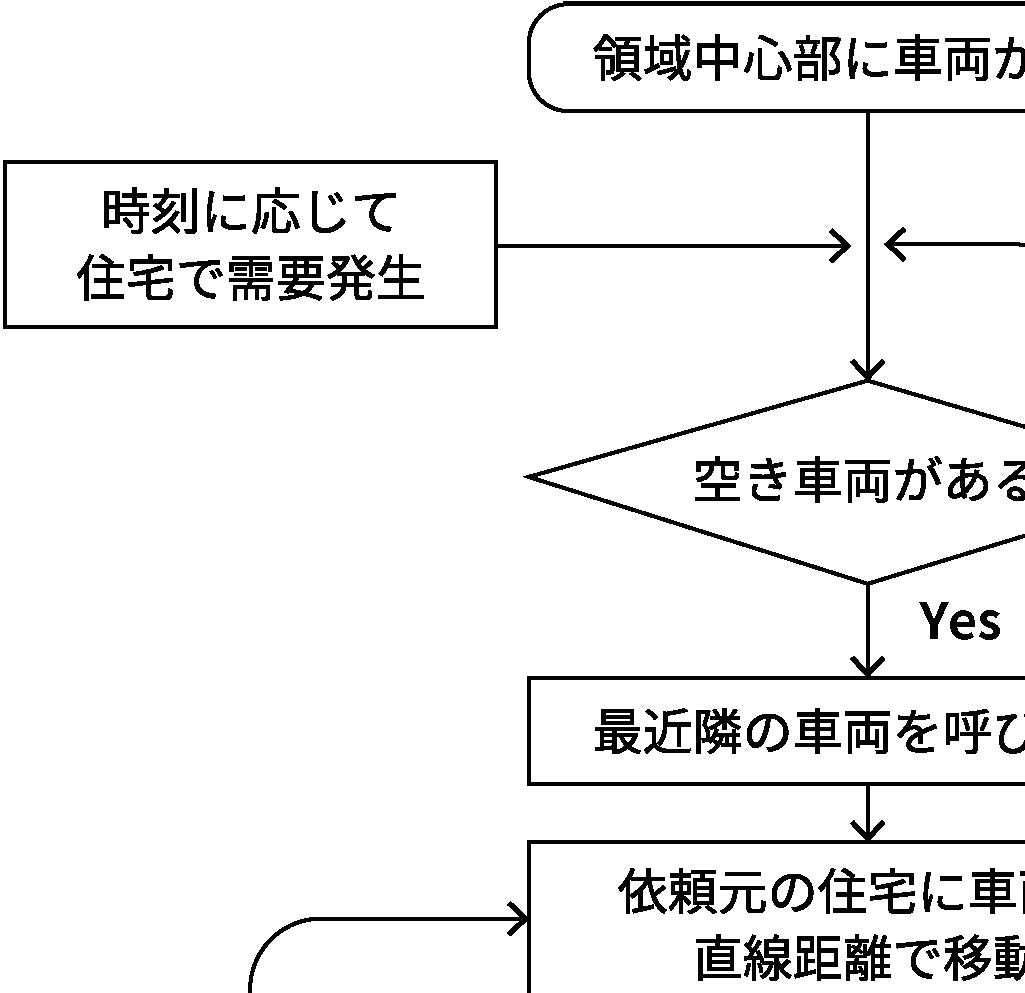
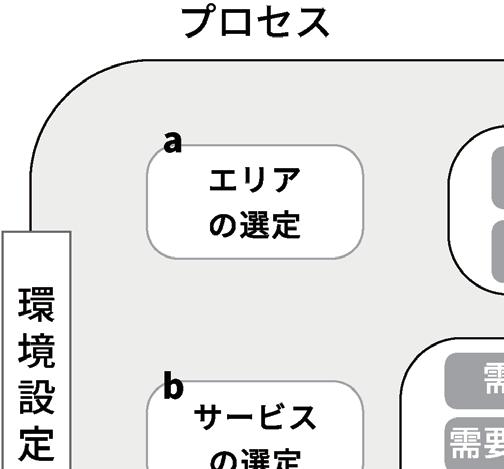
4.2.2 自動運転型と施設型の動作フロー
図2 シミュレーションフロー

71
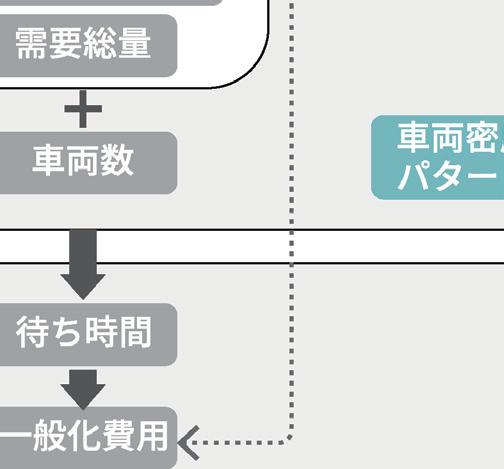
「自動運転型」は、ある住宅で需要が発生し、それに応じて呼び出された自律的 に全ての運転判断を行う自動運転レベル5の機能搭載型自動運転車(以下、車両と 呼称)がその住宅まで移動し、そこで停車をしてサービス提供を行う(図2)。車 両は需要に対してFIFO(First In, First Out)で対応し、需要発生点に対して最も 近くに存在する空き車両が直線距離で時速30kmの速度で移動し対応するものと する。また渋滞の影響は考慮しないものとする。
これに対して「施設型」では、利用者が施設へ住宅から徒歩で移動し、施設にてサー ビスを享受すると考える。利用者は直線距離で時速4kmにて移動するものとする。
4.2.3 地域の設定
ロードマップでは2030年に向けた将来像を「公共交通が普及している都市部」「自 動車中心の都市部」「地方部」の3地域について描かれているため、これらを参照 し人口密度と平均所得が異なる特性を持つ、東京都世田谷区・千葉県流山市・愛知 県豊橋市の3地域を選定した。これら3地域を「都市部」「都市郊外」「地方都市」 の典型として捉える。各市区の人口 15 を可住地面積(総面積から林野面積と主要湖 沼面積を差し引いた面積)で除し、人口密度を算出し、それを用いてシミュレーショ ン上で正方形領域における人口を設定する。またこれらの3つの地域の平均所得に ついては「市町村税課税状況等の調査」 16 の「課税対象所得」を「所得割の納税義務 者数」で除することで算出する。(表2)
4.2.4 サービス需要の設定
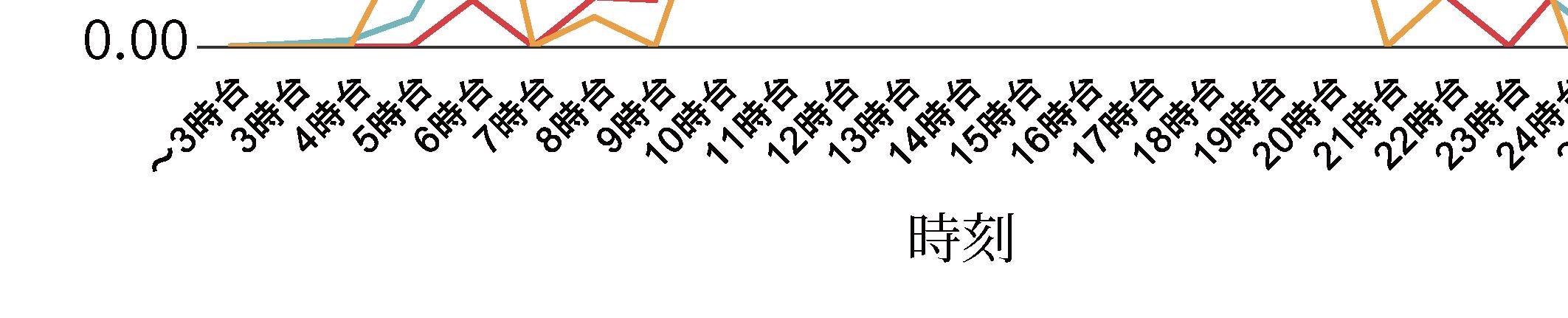
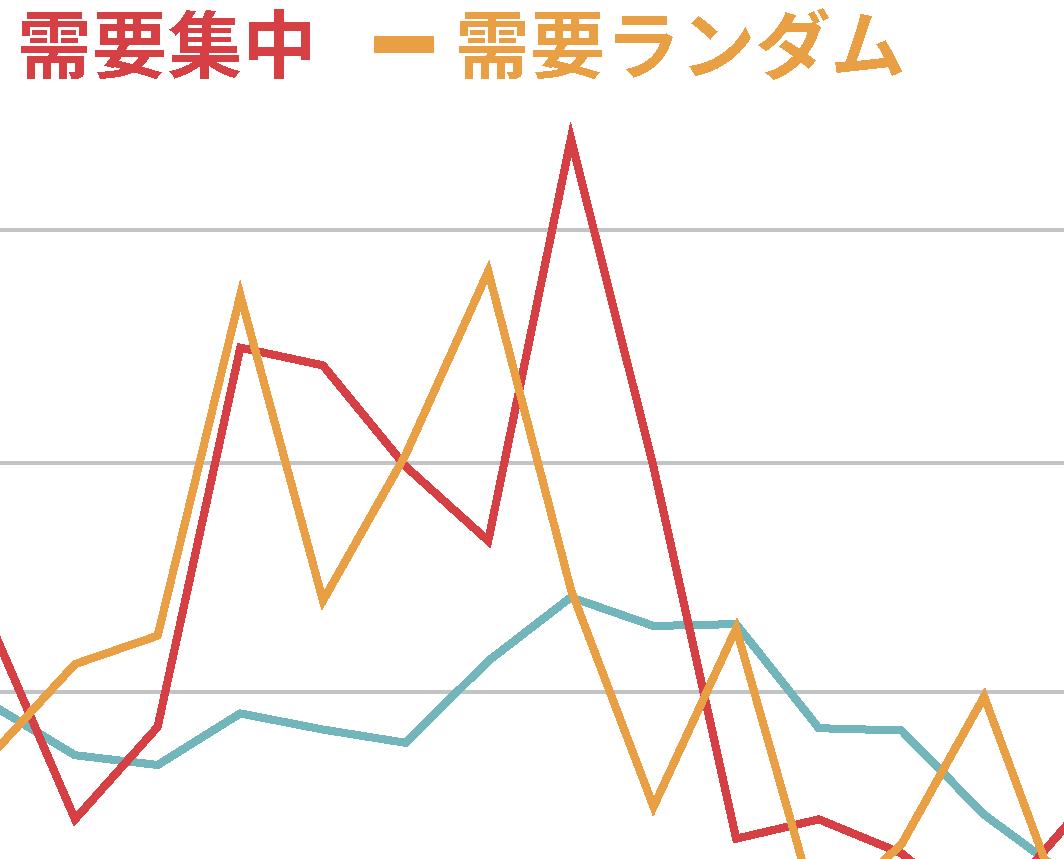
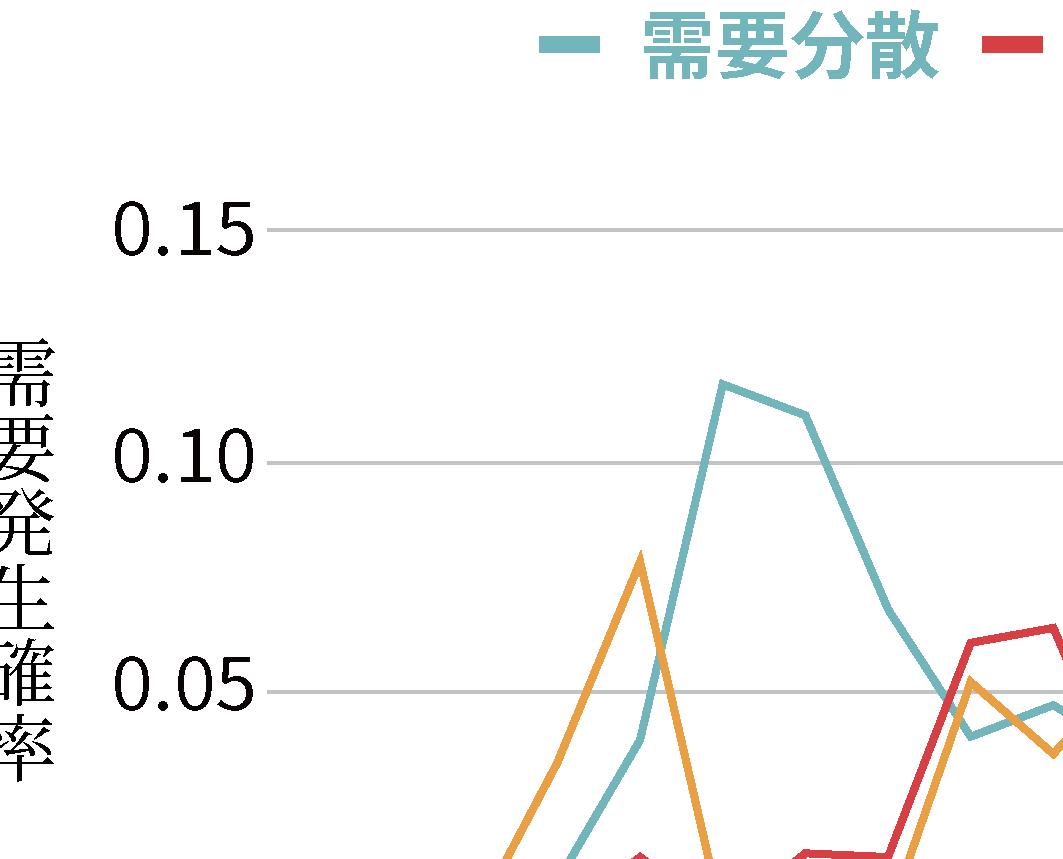
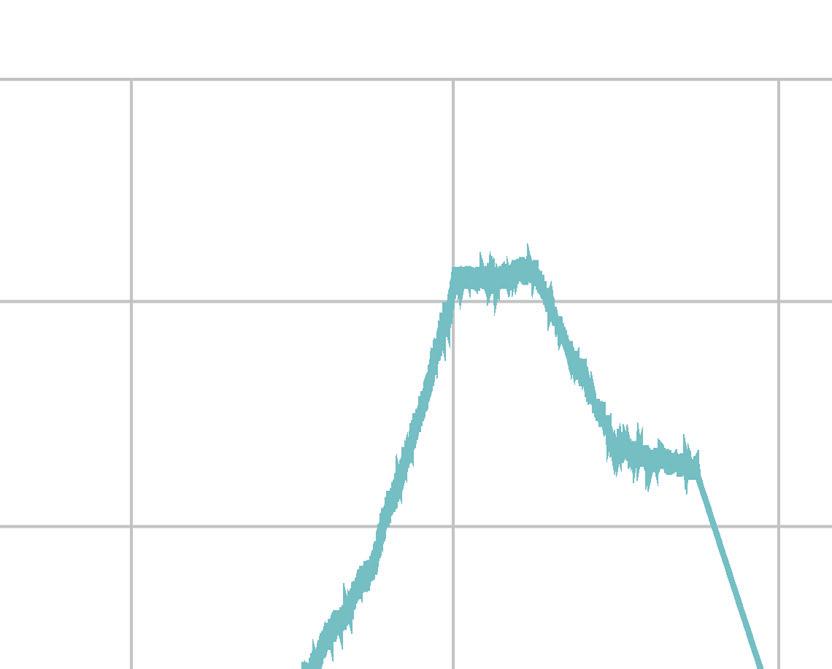
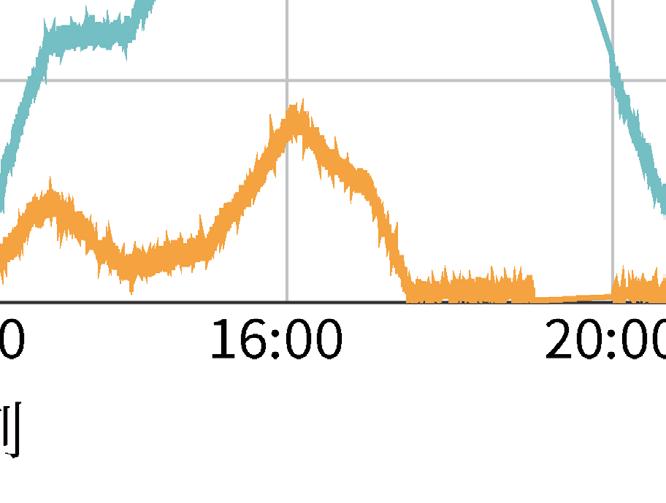
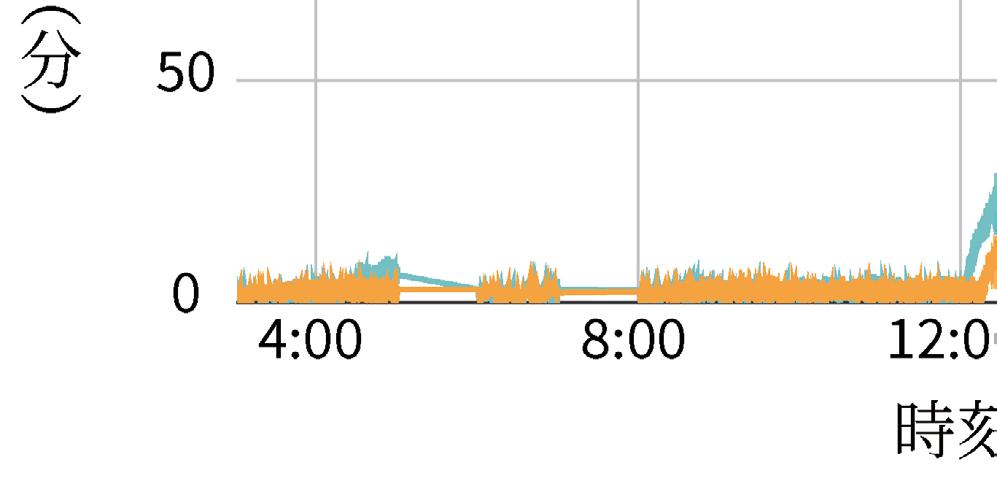
2018年に行われたPT調査(パーソントリップ調査)を参照 17 して、「住宅・寮」「大 規模小売」「公園・スポーツ」についての発生集中量から、時刻ごとの需要発生確 率を3パターン設定し、それぞれ「分散型」「集中型」「ランダム型」の需要パター ンと名付ける(図3)。PT調査によると、「都市部」の「大規模小売」の24時間に おける総発生集中量は、101,600人(2.5km正方形領域の住民数)換算で13,300 回/日、つまり週に一度程度の利用頻度である。この総発生集中量をシミュレーショ

72
第四章 施設機能の代替を可能にするサービスと車両数の算出 図3 時刻ごとの需要発生確率と需要パターン
量の再編を行う。すなわち「住宅・寮」と「公園・スポーツ」の需要パターンにつ いて、需要総量を「大規模小売」と等量に保ちつつ、時刻あたりの需要発生確率を 比例変換した。また地域による需要総量は、「都市郊外」と「地方都市」について 「都市部」を基準に人口比に応じて設定し、都市郊外では5015回/日、地方都市で は1385回/日とした。
73 表1 使用データ一覧
サービスの利用時間は、下限15分、平均30分、上限45分の三角分布とする。 それぞれの需要パターンについて10回の試行を行い、その結果の平均値を用いて 待ち時間を算出する。 4.2.5 車両数の設定 都市部において自動運転車を500、600、700台配備するという3種のシナリオ を用意する。都市郊外と地方都市においては、それぞれ都市部の人口に比例させて 車両数を決定する(表3)。また地域間で比較を行うため、車両数を表2に記した それぞれの地域の人口で除した、一人あたりの車両数を以降では主に使用し、「車 両数:少」「車両数:中」「車両数:多」として表記する。 データ概要 使用データ 備考 需要発生量第6回東京都市圏パーソント リップ調査(H30年,以下、PT 調査) 大規模小売店(デパート、ショッ ピングモールなど)の発生集中 量を使用 人口住民基本台帳(R2年) 平均所得総務省:市町村税課税状況等の 調査(R2年) 豊橋市/世田谷区/流山市の3 地域を比較 地域名 人口 (2.5km正方形領域で換算) 平均所得 東京都世田谷区 (都市部)101,600人5,653,167円 千葉県流山市 (都市郊外)38,314人4,014,687円 愛知県豊橋市 (地方都市)10,587人3,393,720円 シナリオ 車両数:少 車両数:中 車両数:多 一人あたりの車両数 (小数第5位を四捨五入)0.0049台/人0.0059台/人0.0069台/人
表2 地域の人口と所得 表3 一人あたりの車両数シナリオ ンの基準、需要総量とし他の需要パターンについても同量になるように総発生集中
シミュレーション結果

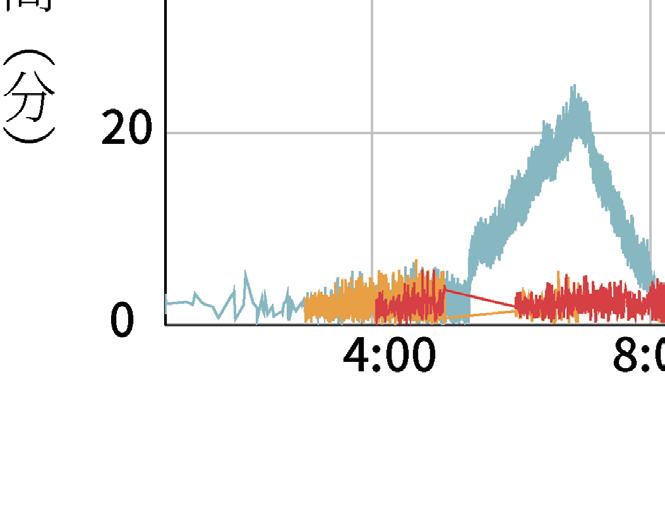
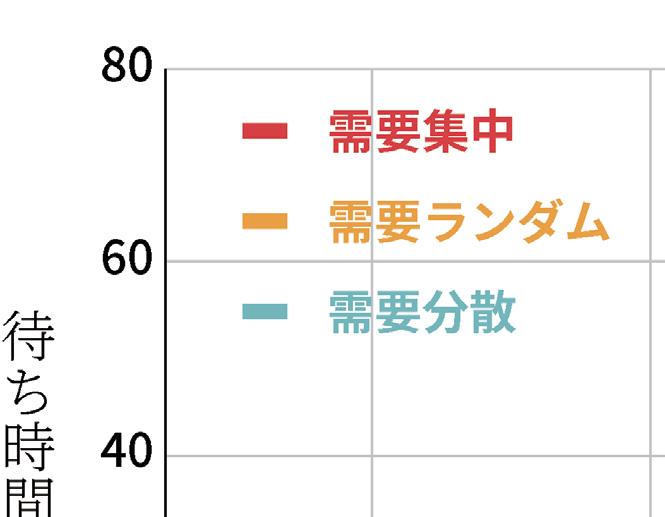
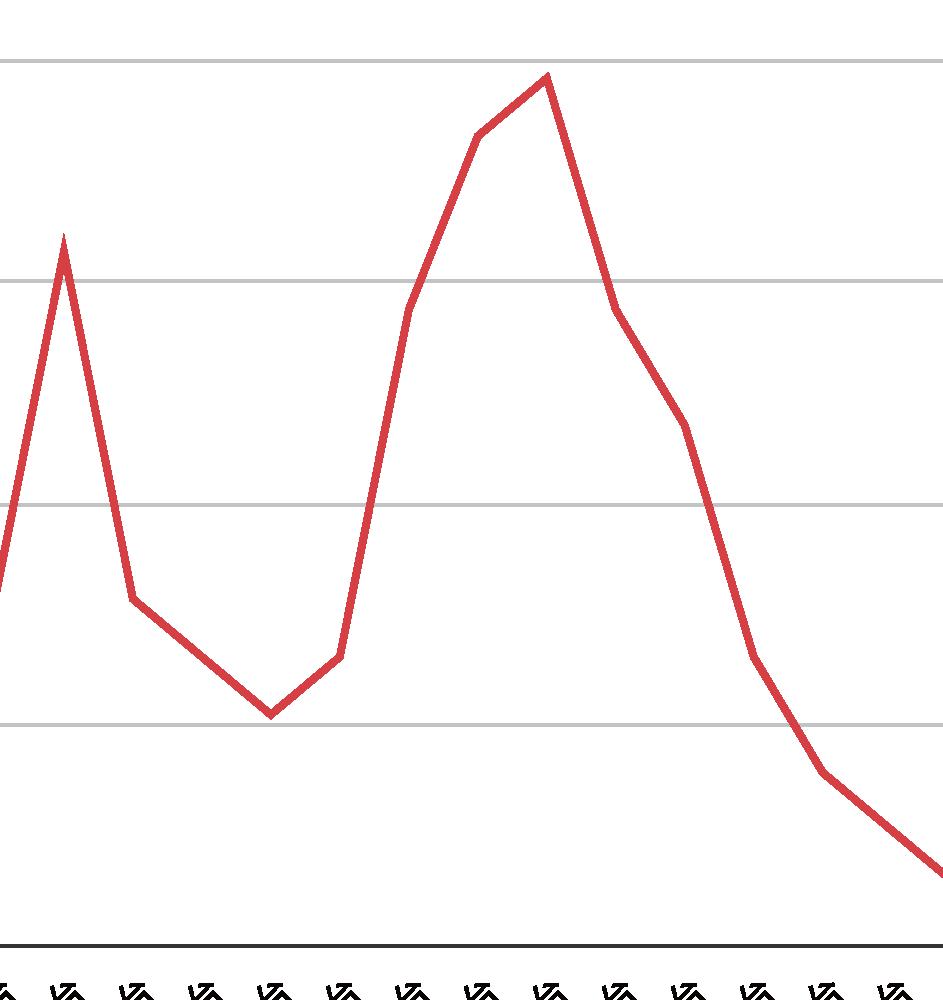
「自動運転型」の分散型と集中型の中間的な特徴を持つ、ランダム型における「車 両数:少」と「車両数:多」の比較を、時刻ごとの待ち時間に着目して行う。都市 部と地方都市のいずれの地域においても次のような結果が見られた(図4)。
まず待ち時間の最大値について、「車両数:少」の場合、150分を超える値となり、 一方で「車両数:多」においては40分程度となった。つまり車両数が約1.4倍に 対して最大の待ち時間は1/3以下であった。

また平均待ち時間については「車両数:少」においては約55分となり、一方で 「車両数:多」においては約10分となった。つまり車両数が約1.4倍に対して平均 待ち時間は1/5以下であり、待ち時間の最大値より平均値の方が車両数の増減の影 響を受けやすいことを示唆している。
図4 ランダム型の時刻ごとの待ち時間と車両数の比較(都市部)
74
第四章 施設機能の代替を可能にするサービスと車両数の算出 4.3
4.3.1 時刻ごとの待ち時間推移と車両数の関係
4.3.2 需要パターン・地域による待ち時間と車両数の関係
図5は「自動運転型」の需要パターンと一人あたりの車両数、そしてその結果と して生じる平均待ち時間の関係性を示している。「自動運転型」の需要パターンに よる1日の平均待ち時間を比較すると、集中型>ランダム型>分散型の順番で長く なり、また一人あたりの車両数が等しい場合、集中型は分散型の5倍程度の待ち時 間になった。





次に「自動運転型」の1日における平均待ち時間と「施設型」の往復移動時間が 等しくなるときに必要な車両数を考察する。「施設型」の平均往復移動時間につい ては都市部で29.56分、都市郊外において30.18分、地方都市31.44分となり、こ こでは最も「自動運転型」が不利になる都市部の結果を用いて比較を行う。この結 果、「施設型」の平均往復時間と同等の平均待ち時間にするために必要な「自動運 転型」の車両数は、集中型においては約0.0068台/人、ランダム型においては約 0.0058台/人となり、分散型においては0.0050台/人未満であることがわかった。 またこのときに必要な車両数について、いずれの都市間でも大きな違いは確認され なかった。













一方「自動運転型」において、人口密度が低いと住宅間の移動時間が長くなるため、 待ち時間が長くなり、結果的に地域差が生じると考えられるが、本研究においては 必ずしもそのようにはならなかった。この原因として、確率密度で規定される需要 量の変動が、待ち時間の増減に繋がり、その影響が約2.5分(「自動運転型」の全 シナリオの平均値)の住宅間での移動時間より大きく作用していることが挙げられ る。
図5 需要パターン・地域による平均待ち時間の比較






















75
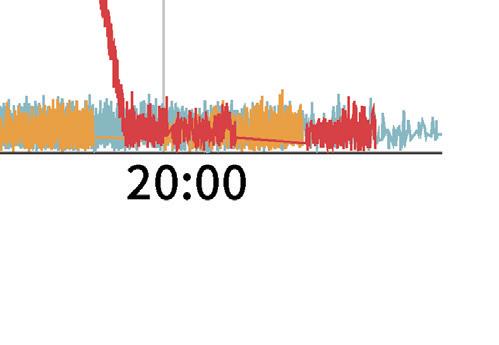
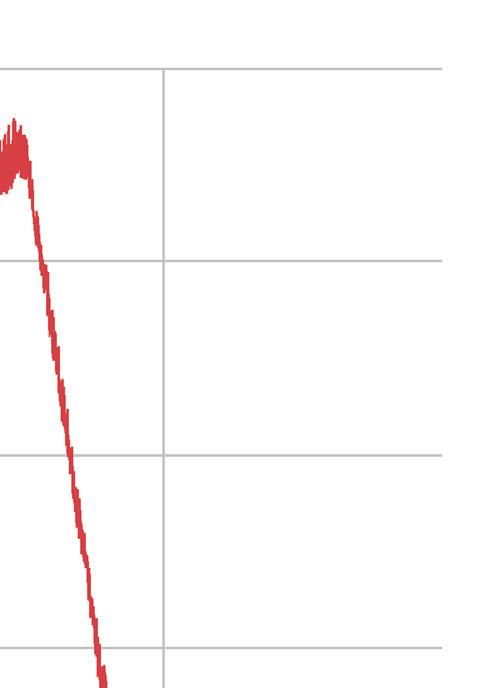
次に都市部での「車両数:多」について、「分散型」「集中型」「ランダム型」の 比較を「時刻ごとの待ち時間」に着目して行う(図6)。この結果、1日あたりの 需要総量が同じであっても、その需要パターンによって時刻ごとの待ち時間は大き く異なることがわかった。つまり分散型では、朝の時間帯における需要に関して 20分程度の待ち時間が生じたが、そのほかの時間帯においては5分程度の待ち時 間となった。一方集中型では、昼の時間帯以降、断続的に平均待ち時間が伸びる現 象が生じた。特に17時から18時にかけては待ち時間が最大70分程度となった。 これは、断続的にこの時間帯における需要量が車両数を上回ったことにより、車両 の不足状態が発生し、前の利用者の待ち時間が次の利用者の待ち時間に重なるよう にして伸びていると考えられる。また中間的な需要パターンであるランダム型にお いては、昼から夕方にかけて平均待ち時間が上昇しているものの、昼以降にかけて 待ち時間が一時的に解消されることにより、集中型のような急激な待ち時間の増加 に繋がらす、最大の待ち時間であっても40分程度となった。
以上の結果から、需要が集中した時間帯の後に一時的に需要量が車両数を下回る 時間が存在することにより時刻ごとの平均待ち時間が上昇することを防ぐことが可 能であると考えられる。
4.3.3 既存サービス車両数との比較
算出を行った自動運転車の車両数を、現在の都市における車両数と比較すること で、都市の受容量の観点から現実性があるのかを検討する(表4)。
都市を走行する車両として、タクシー(個人+法人タクシー)は東京23区・武
76
図6 時刻ごとの待ち時間と需要パターン(都市部_車両数:多)
第四章 施設機能の代替を可能にするサービスと車両数の算出
サービス名 車両数/人口(東京都23区) 法人・個人タクシー 0.0038台/人 コイン式駐車場 0.0168台/人
蔵野市・三鷹市において38,133台(2020) 18 を有している。この車両数を同一地域 の人口で除し、一人あたりの車両数に変換した上で、4.3.2 で確認された「施設型」 の移動時間とランダム型の「自動運転型」の待ち時間が等しくなる車両数0.0058 台/人とを比較すると、タクシーは35%程度少ない台数であることがわかる。 次に都市における駐車可能量から検討するため、コイン式駐車場(一般公共の用 に供する、時間貸し、主として無人の特徴を有する)と比較を行う。コイン式駐車 場は東京都23区において162,400車室(2020) 19 を有しており、一人あたりの車両 数を前述の0.0058台/人と比較をすると約2.9倍程度多い車両数であることがわ かる。
以上の結果から、週一回程度、30分間の利用であっても、必要となる車両数は タクシーの車両数よりも多くなることが見込まれるため、このようなサービスが都 市部において複数展開すると、新たな渋滞を引き起こす可能性が高いと筆者は考え る。したがって、3章において移動を目的としたライドシェア型のサービスや、車 両間隔を保つことによる車の流れの改善などによる渋滞緩和の可能性について議論 を行なっていたが、今回の結果から国土交通省の「2040年、道路の景色が変わる」 のビジョンで取り上げられていた機能搭載型自動運転車などのサービスを提供する 自動運転車が施設機能を完全に補完した場合、新たな渋滞発生が見込まれる。これ らのことから、需要総量がタクシーや駐車場と比較して十分に少なく、また時間帯 による需要量の変化が少ないサービスを検討する必要性があると考える。
4.3.4 小結
77
全ての住民が週1回程度利用するサービスのシミュレーションを行うと、需要パ ターンの比較を行うと需要集中>需要ランダム>需要分散の順に待ち時間が長くな り、また平均待ち時間は需要集中においてその需要分散の5倍程度の時間を要する ことがわかった。また施設型の往復移動時間と同等の待ち時間に必要となる車両数 は集中型において約0.0068台/人、ランダム型においては約0.0058台/人となり、 分散型においては0.0050台/人未満であることがわかった。さらにこの車両数と 既存のサービス、タクシーの台数を比較するとランダム型と同等の車両数を行うた めには2.9倍程度の車両数が必要であることがわかった。 表4 既存サービスの一人あたりの車両数
1. 紀伊雅敦, 横田彩加, 高震宇, 中村一樹:共有型完全自動運転車両の普及に関する基礎分析, 土木学会 論文集 D3, Vol. 73, No. 5, pp.I_507-I_515, 2017.
2. 松中 亮治, 大庭 哲治, 住川 俊多:都市内交通シミュレーションを用いた共有型完全自動運 転車両の普及による社会的便益に関する研究, 都市計画論文集, Vol.55, No.2, pp115-125, 2020
3. 加藤浩徳, 小野田惠一, 木全正樹 : 交通時間と交通時間節約価値との関係に関する分析, 運輸 政策研究, Vol.9 No.2, pp.3, 2006
4. Felix Steck, Viktoriya Kolarova, Francisco Bahamonde-Birke, Stefan Trommer, Barbara Lenz: How Autonomous Driving May Affect the Value of Travel Time Saving for Commuting, TRB 97th Annual Meeting, vol.2672, pp.11-20, 2018
5. Kay W. Axhausena, Stephane Hessa, Arnd Ko¨ nigb, Georg Abayc, John J. Batesd, Michel Bierlairee:Income and distance elasticities of values of travel time savings: New Swiss results, Transport Policy, 15 , 173–185, 2008
6. Singleton, P. A.:Discussing the “positive utilities” of autonomous vehicles: will travellers really use their time productively?, Transport Reviews, Vol.39, No.1, pp. 50–65, 2018
7. 東達志, 香月秀仁, 谷口守:都市構造の違いがシェア型自動運転車の運行効率に及ぼす影響, 都市計画論文集, vol.53, No.3, pp.551-557, 2018
8. 冨岡秀虎, 村上僚祐, 高山宇宙, 森本章倫:MaaSの普及を想定した公共交通と人口分布に関 する研究, 土木学会論文集, Vol.76, No.5, pp.793-801, 2021
78 参考文献 第四章 施設機能の代替を可能にするサービスと車両数の算出
9. Junyu Cao, Wei Qi, Stall Economy: The Value of Mobility in Retail on Wheels, Forthcoming, Operations Research, 2020
10. 御手洗陽, 東達志, 谷口守 : 小さな拠点における都市機能確保に資する機能搭載型自動運転 車(ADVUS)の活用可能性 ―医療サービスに着目して―, 土木学会論文集, Vol.75, No.6, pp.277-285, 2020
11. 御手洗陽, 小松崎諒子, 谷口守:モビリティ・イノベーションの普及を見据えた都市機能の 新たな提供手段の可能性―機能搭載型自動運転車(ADVUS)に着目して―, 土木学会論文集, Vol.76, No.5, pp.657-666, 2021
12. 谷本圭志, 土屋哲, 長曽我部まどか:移動販売のサービス水準に着目した店舗選択に関する 実証分析, 日本都市計画学会 都市計画論文集,Vol. 52, No. 3, pp. 429-434, 2017
13. 秋月優里, 真鍋陸太郎, 村山顕人, 小泉秀樹:移動型サービスを受け入れる空間利用のあり方 - 都市部・郊外部における移動販売の事例調査から -, 都市計画論文集, Vol.55, No.3, 2020
14. 鈴木達也, 讃岐亮 , 吉川徹:住宅の機能を代替する施設の立地と単身者の生活行動の関連の分 析, 日本建築学会計画系論文集, 第77巻, 第675号, pp1131-1137, 2012 15. 総務省:住民基本台帳, 2020 16. 総務省:市町村税課税状況等の調査, 2020 17. 東京都市圏交通計画協議会:第6回東京都市圏パーソントリップ調査, 2018 18. 一般社団法人東京都個人タクシー協会:東京都個人タクシー協会会報, 第566号, pp1, 2021 19. 一般社団法人日本パーキングビジネス協会:コイン式(時間貸)自動車駐車場市場に関する 実態分析調査2020年版, 2021
79
80 第五章 自動運転車によるサービス提供範囲の特定
81
自動運転車が導入されることにより、利用者は施設
考えられる。本章では特に施設機能を代替する可能性 の高い機能搭載型自動運転車が導入されることによっ て、新たな便益を享受する可能性の高い立地を特定す ることによって、自動運転時代における新たな街区の 設定などに役立つことを目的とする。 第5章: 自動運転による サービス提供範囲 の特定
目的:
と自動運転サービスの選択を行うことが可能になると
5.1.1 時間価値について
本章においては、利用者の時間価値に着目して自動運転車によるサービス提供範 囲について算出を行っていく。さらにこの時間価値を活用して、利用者の移動と待 機と金銭の負担を考慮した時間コストと車両利用金銭コストの2つを統合した、一 般化費用を評価値として用いる。なお時間価値や一般化費用については以下のよう な整理、議論が行われてきている。
まず、「時間価値」(Value of time)とは、時間の変化に対する支払い意思額の ことである 1 。加藤は「特定の活動を行う時間が1分増える,あるいは減ることに 対して、最大いくらまで支払うことができるかを表したものが、その活動の1分あ たりの時間価値である 2 」と定義している。
時間価値の算出方法については複数のアプローチが用いられてきた。加藤は以下 のように手法を分類している。マイナーなものでは「集計モデルによる時間価値推 定」「不動産価格法による時間価値推定」「生理学法による時間価値推定」である。 メジャーなものについては「所得接近法」と「選好接近法」がある。
所得接近法は交通の時間価値を労働賃金率あるいは労働賃金率を修正することに よって求めるものであり、選好接近法は人々の実際の行動結果や意向に関するデー タから、移動に対する時間と費用に関わる情報を抽出し、交通の移動時間を推定す るアプローチである 3
82
5.1
第五章 自動運転車によるサービス提供範囲の特定
シミュレーションの評価関数
況の影響を排除したメタ分析などが近年の研究分野では主流として用いられてい る 4 。 一方、本研究においては「所得接近法」である「賃金率法による一般化費用」を 使用する。一般化費用とは交通時間×時間価値+交通費用によって定義されるもの である 5 。この手法を用いる理由として、自動運転車という乗車体験等を含めて未 知の部分が多い技術であり、選好接近法を使用するには十分な前提条件を回答者が
。 「選好接近法」には「表明選好(SP)アプローチ」「顕示選好(RP)アプローチ」 が主にあり、またこれらを発展させた、離散選択モデルによる研究や、個別的な状
認知することが難しく、正当なデータを収集することが難しいことが挙げられる。 また所得接近法は賃金率という統計に基づく値であり、信憑性が高いことも挙げら れる。実際に、国土交通省による費用便益分析マニュアル 6 では、所得接近法を用 いた便益の測定が行われている。特に日本では、交通の時間価値を把握する際に、 政府による公式の交通行動調査データを用いて、道路交通の時間価値を網羅的に分 析することがほとんどなかったと言われている 7 。 しかしこの一般化費用や所得接近法に対しては批判もある。Grey 8 は主に二点か ら批判をしている。まず一つ目に交通時間と交通費とを統合し、単一の指標を作る こと自体が妥当でない、二つ目に移動時間として用いられる標準値が、実証的な交 通データから得られる時間価値との間で矛盾が生じると指摘している。
一般的に時間価値の算出にあたっては、業務時間と非業務時間における交通時間 価値は分類して考えられている。業務交通とは、雇用者の指示のもと、業務時間中 に行う交通である。また非業務交通とは通勤や余暇、観光などの私的交通が含まれ ており、主に業務時間外に行われる移動のことを指している。加藤はこの業務交通 と非業務交通を区分することが極めて重要であると指摘している 9 。この理由とし て、ある時間における時間配分を行う意思決定のプロセスが異なり、業務交通であ る場合、雇用者の意思によって行動が決定される。これに対して非業務交通におい ては全ての意思決定は本人によるものであるとされているからである。 以上のことを踏まえ、本研究では、自宅で自動運転車が到着することを待つこと や、昨今の社会情勢を考えるとテレワークやフレックスタイム制度などにより、あ る程度本人の意思決定により時間配分を検討することが可能であると考えられるこ とから非業務時間であるが、労働時間を含む状況として考えることが妥当であると
83
考える。したがって、所得接近法を用いて算出を行い、以降の時間価値として使用
する。また本研究では、時間価値を用いて、自動運転車が自宅に来るまでの待機時 間や自宅から施設まで移動するためにかかる往復時間の計測を行う。
シミュレーション環境
5.2.1 範囲と人口密度の設定
5章では、4章のシミュレーション環境を踏襲しながら、サービス提供範囲と人 口密度について新たなパターンを追加する。またシミュレーションシナリオとして 4章の考察から、車両数を抑制するために需要パターンが分散型に近く、需要総量 が抑えられている状況を想定する。さらに条件に合致するスポーツジムの需要パ ターンを使用したシナリオを用いる。
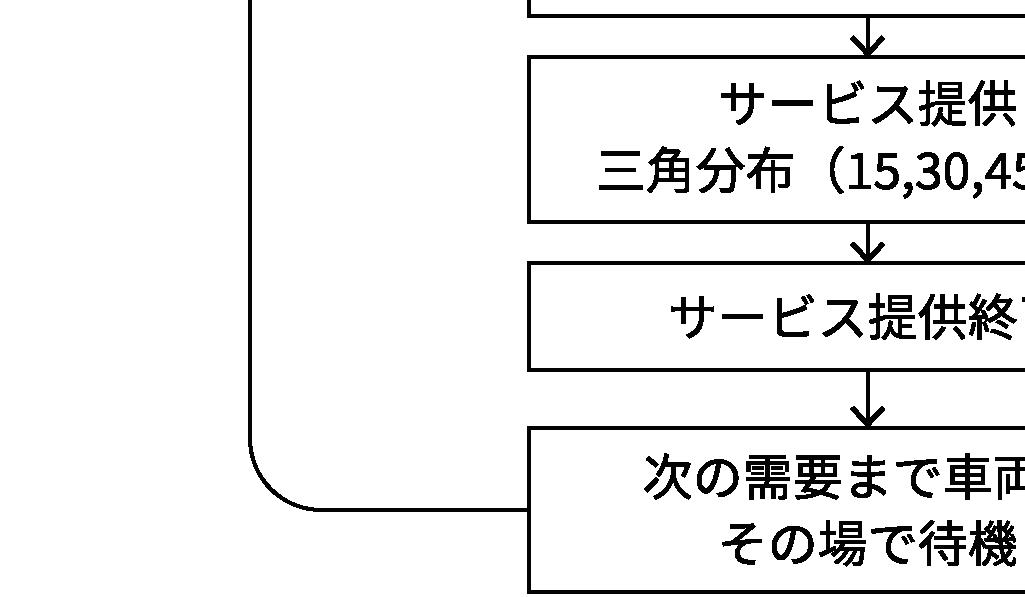
まず提供範囲と人口密度について、4章では2.5kmの正方形領域内に格子点上 に一様になるようにい住宅を配置したが、5章では図1のように1.25km、2.5km、 3.75kmの3段階に正方形領域を設定する。また2.5kmと3.75kmの場合、内側 により小さい正方形領域を配置し、それぞれの正方形領域に囲まれた間の部分に
1.25km 正方形領域 2.5km 正方形領域
3.75km 正方形領域
表2 領域パターンと人口(人)
1.25km 1.25-2.5km 2.5-3.75km 都市部 17,072 16,472 15,916 都市郊外 10,432 9,832 9,276 地方都市 5,989 5,389 4,834 1.25km正方形領域換算 2.5km正方形領域換算 3.75km正方形領域換算 都市部 26,675 102,950 223,825 都市郊外 16,300 61,450 130,450 地方都市 9,358 33,682 67,972
84
5.2
第五章 自動運転車によるサービス提供範囲の特定
図1 正方形領域のパターン 表1
領域パターンと人口密度(人/台)
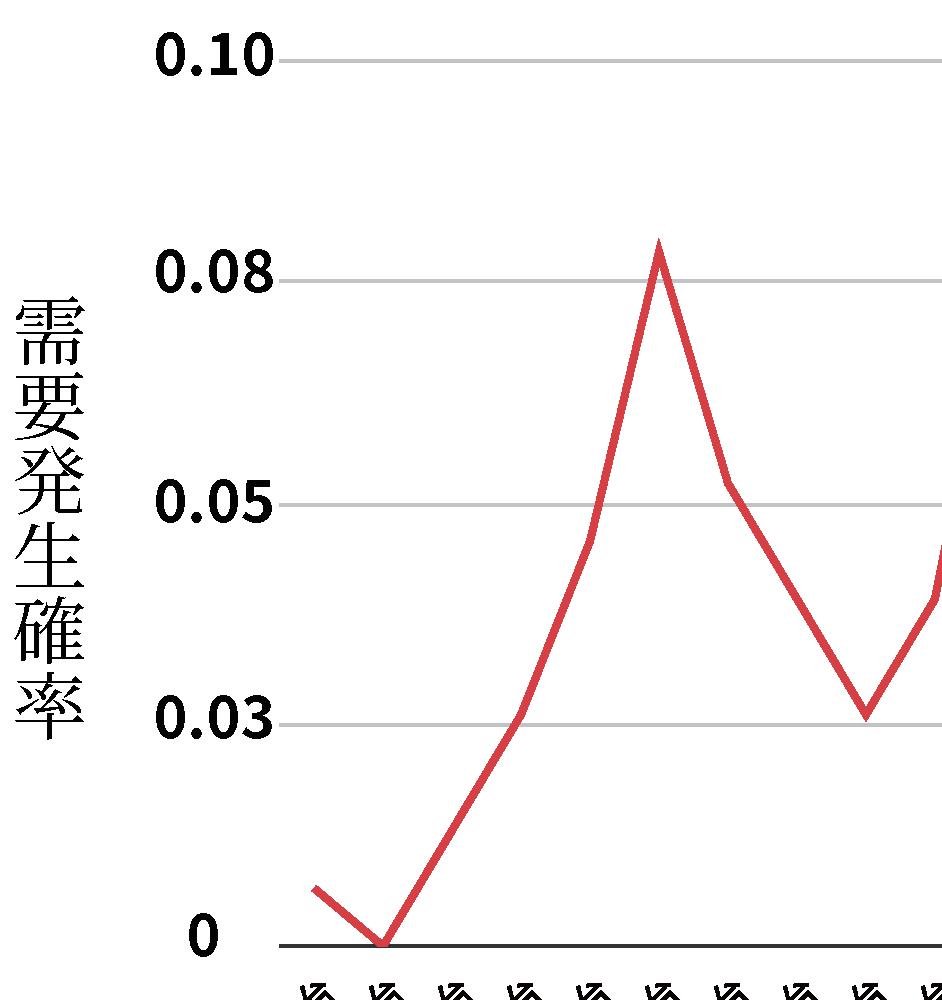
図2 ジム型の時刻ごとの需要発生確率 表3 ジム型の使用データ 需要総量 特定サービス産業動態統計調査(2019) 1 )のフィットネス利 用者数合計を全国人口(2019)と年間日数365日で除し、正 方形領域内における人口を乗じて算出:550回/日 需要パターン 大手フィットネスの時間毎利用者数 2 を参照 利用時間 大手フィットネスのパーソナルトレーニング 3 を参照し下限 60分、上限90分、平均120分の三角分布(60分,90分,120分)
ついて異なる人口密度を与える(表1)。この部分の人口密度について、1.25km の正方形領域では世田谷、豊橋、流山の町丁目人口から抽出された人口密度を用 い、1.25kmと2.5kmの正方形領域に囲まれた範囲の人口密度は、1.25km正方形 領域の人口密度に対して1k㎡あたり800人少ない値とする。この減少数は3つの 地域の実際の減少数に近似した800人を採用する。同様にさらに外側の2.5kmと 3.75kmの正方形領域に囲まれた範囲でも、その内側の人口密度から1k㎡あたり 800人少ない値を与える。つまり外周に向かうほど、段階的に人口密度が下がると いう状況を仮定として設定する。この正方形領域に囲まれた、人口密度で定義され る需要点は、4章のシミュレーション環境と同様にして格子点上に一様になるよう に配置する。

85
5.2.2 需要パターンと車両数の設定 需要パターンについては、都市部における需要総量が1日あたり550回と4章 で使用した仮想モデルの4%程度に抑えられた状態を想定する。需要パターンは図 2に示す大手フィットネスクラブの時間毎利用者数を参考とした、全体的に需要が
分散しながら、3つの時間帯に需要が集中するものとする。また車両の利用時間は 大手フィットネスクラブのパーソナルトレーニング時間を参照し、下限60分、上 限90分、平均120分の三角分布で定義された時間とする(表3)。
車両数については、4章と同様に一人あたりの車両数を0.0004,0.0005,0.0006台 /人の3パターンで定義し、表4のようにそれぞれの範囲に対して与える。
表4 それぞれの正方形領域と車両数のパターン(台)
1.25km正方形領域換算2.5km正方形領域換算3.75km正方形領域換算
都市部 0.0004台/人 11 41 90 都市部 0.0005台/人 13 51 112 都市部 0.0006台/人 16 62 134 都市郊外 0.0004台/人 7 25 52 都市郊外 0.0005台/人 8 31 65 都市郊外 0.0006台/人 10 37 78 地方都市 0.0004台/人 4 13 27 地方都市 0.0005台/人 5 17 34 地方都市 0.0006台/人 6 20 41
86
第五章 自動運転車によるサービス提供範囲の特定
5.2.3「自動運転型」のコストモデル
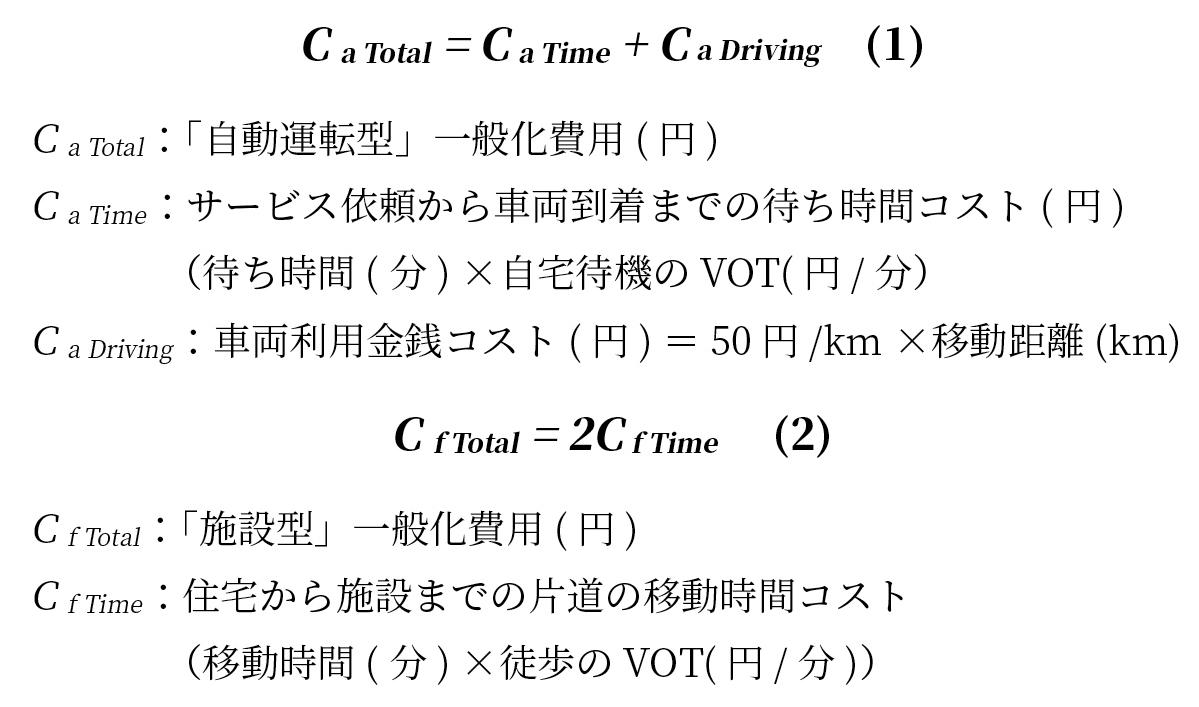
「自動運転型」の一般化費用を式(1)に基づき、算出する。すなわち一般化費用 として、サービス依頼から車両到着までの住宅での待ち時間コストと、上条ら 10 の 研究に従った車両の出発地から住宅までの移動距離に応じた車両利用金銭コスト を合算する。車両利用金銭コストは前述の研究で使用されていた、距離に応じた 1kmあたり50円を採用する。なお、既存の鉄道が走行距離1kmあたり約20円 であることがこの研究で示されている。一方で、一回あたりの車両利用金銭コスト は車両の導入費用や償却期間など不透明な部分も多いことに留意するべきである。 5.2.4「施設型」のコストモデル
「施設型」の一般化費用については、住宅と施設の往復を直線距離で徒歩移動し た場合に要する時間コストで表す(式(2))。現実に即すると、施設への移動の前に 支度準備などの時間が別途必要だが、本研究では提案が過大に評価されないように、 「自動運転型」に不利な状態を想定して移動時間のみを利用する。
5.2.5 時間価値(VOT)の設定
徒歩と自宅待機のVOTの差異と、地域による平均所得を考慮に入れるため、前 章の平均所得から年間の所定労働日数245日と、1日の所定労働時間480分間を除 することで算出した上記3地域の分給を利用する。それぞれの地域での分給は都市 部では48.00円/分、都市郊外で34.17円/分、地方都市で28.83円/分、全国平 均29.16円/分となる。(小数第3位を四捨五入)
「施設型」における徒歩のVOTについては国土交通省が示す、全国で用いられ る歩行者の時間価値、25.64 円/分を用いる 11 。徒歩の時間価値は、前述の時間価値 を全国と地域ごとの分給に従い比例変換することで算出する。(表5) 自動運転車車内における時間価値を、Spieserら 12 は平均賃金の20%と設定して いる。この根拠として、自動運転車車内においては、仕事や読書あるいはリラック スすることのできる時間であるためとしている。またChildressら 13 は自動運転車 内での時間価値を平均賃金の35%というシナリオを用いて計測を行っている。 以上のことから自宅での待機時間は、自動運転車車内における活動と同等、もし くはそれよりも自由に活動を行うことができると考えることから、時間価値を平均 賃金の20%と30%に設定した上で計測を行う。
87
表5 想定する時間価値(VOT)(円/分) 地域 施設型 自動運転型 徒歩移動自宅待機(分給30%相当)自宅待機(分給20%相当) 都市部42.2514.49.6 都市郊外3010.256.83 地方都市25.358.665.77
シミュレーション結果 5.3.1 地域による待ち時間の差異
総需要量を前章の4%程度に抑えることにより、正方形領域の差異から生じる待 ち時間に、地域間で違いが生じた。
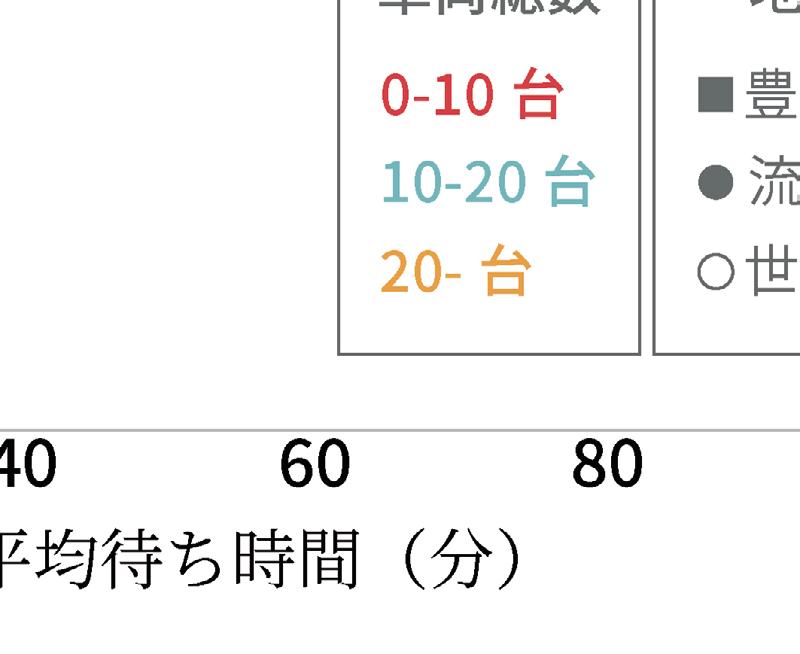
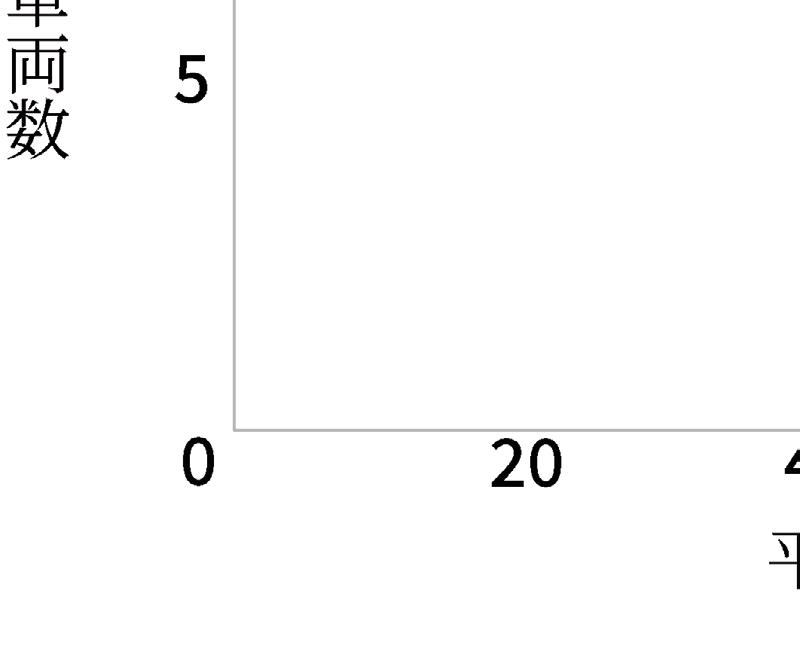
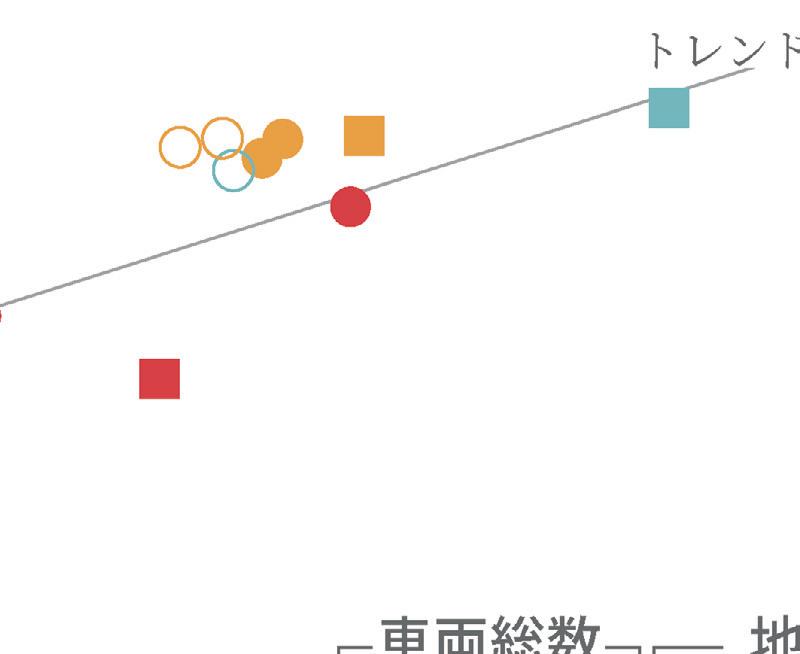
まず3つの地域の平均待ち時間と一人当たりの車両数の比較を行う(図7, 8, 9) 。図7のように、都市部においてはいずれの一人当たりの車両数であっても、正方 形領域の範囲による平均待ち時間の結果は3分前後の差異となり、範囲による大き な違いが見られなかった。一方、地方都市においては車両数0.0004台/人の場合、 1.25kmと3.75kmの正方形領域の間で40分程度の待ち時間の差が生じた。都市 郊外においては、1.25km正方領域以外の場合では、平均待ち時間が車両数0.0004 台/人で57分前後、0.0005台/人で25分程度、0.0006台/人で10分程度になる など、都市部に近似した待ち時間となった。
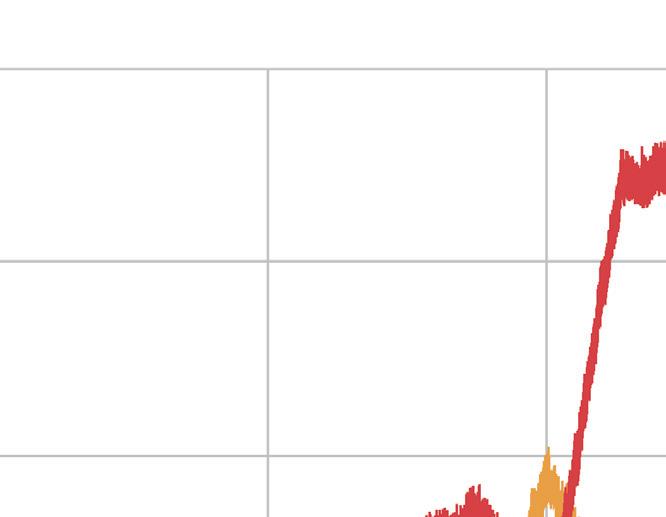
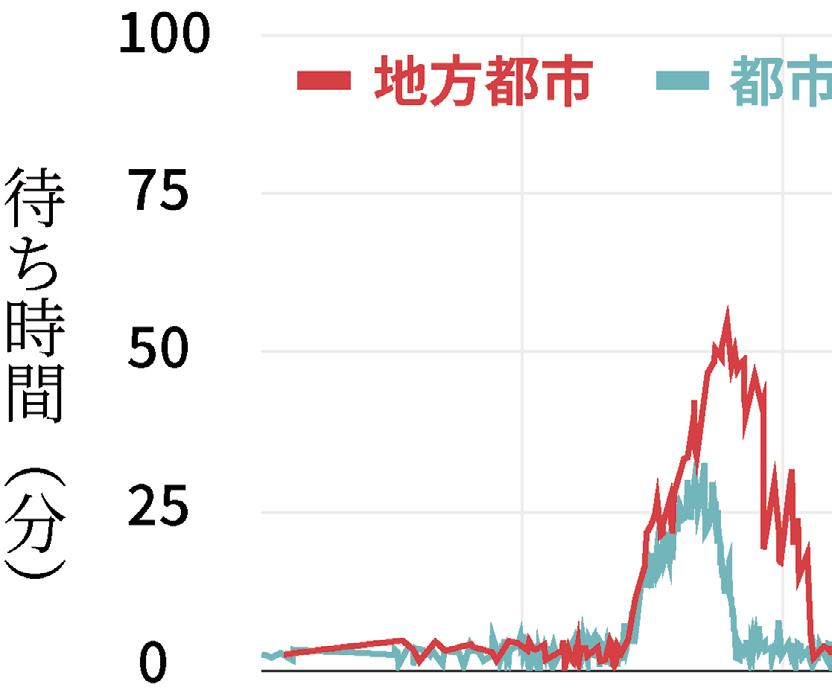
また時刻ごとの待ち時間に着目し、図6のように同じ3.75kmの正方形領域、 一人あたりの車両数0.0005台の場合について、都市部と地方都市を比較すると、 人口の少ない地方都市においては午前の時間帯における待ち時間が都市部の2倍、 50分超になっており、また正午の時間帯においては地方都市のみが待ち時間が伸 びていることが確認できる。

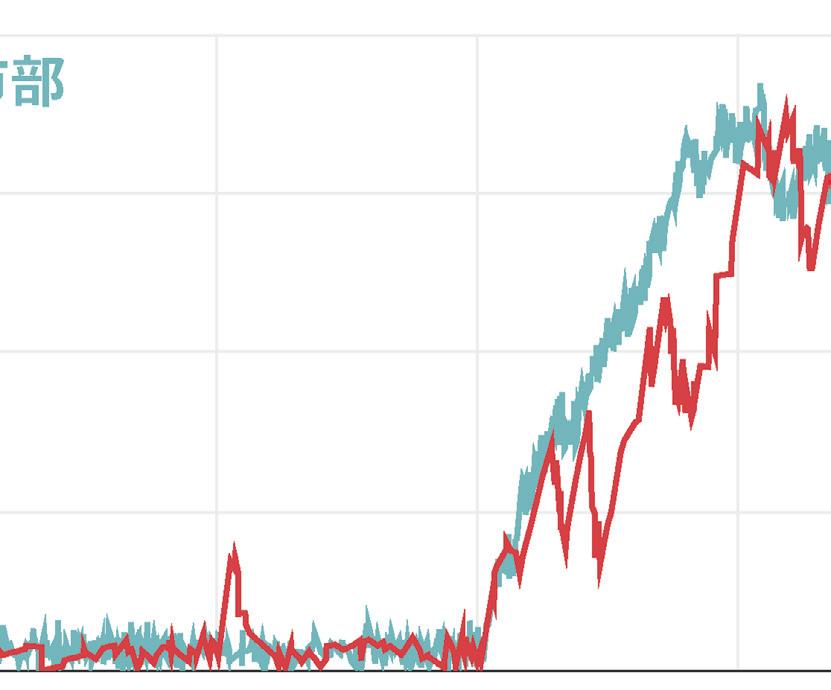
これに対して、3.75kmの正方形領域で一人あたりの車両数0.0006台においては、 地域間で平均待ち時間の結果に大きな差異は見られなかった(図7,8,9)。このこと から平均待ち時間を決定する要因は正方形領域の範囲や地域による違いではなく、 総需要量に対する車両数の割合による影響が大きいと考えられる(図10)。すなわ ち1.25km正方形領域や地方都市において待ち時間が急増する場合、その車両の絶
図6 時刻ごとの待ち時間 (3.75km領域_0.0005台/人)
88
5.3
第五章 自動運転車によるサービス提供範囲の特定
図7 都市部の一人当たりの車両数と平均待ち時間
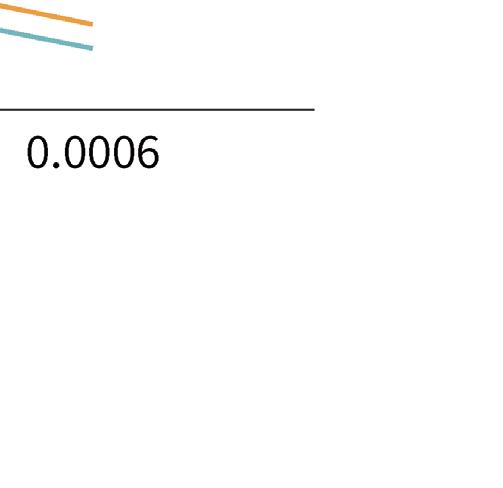
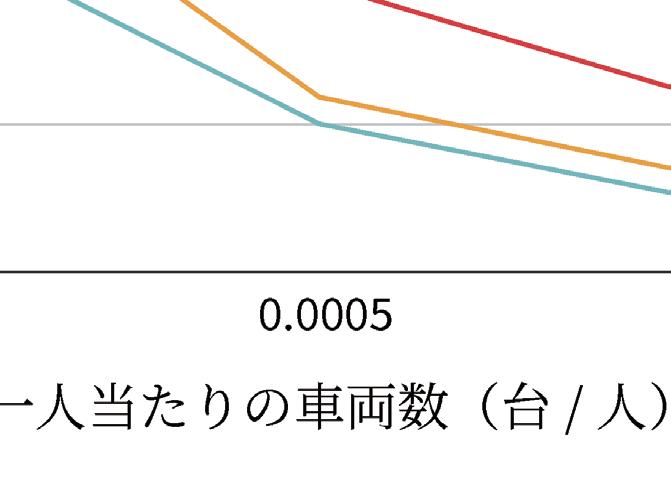
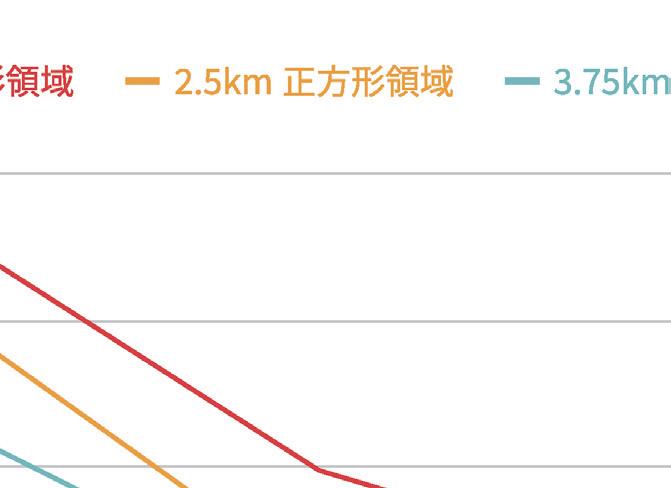
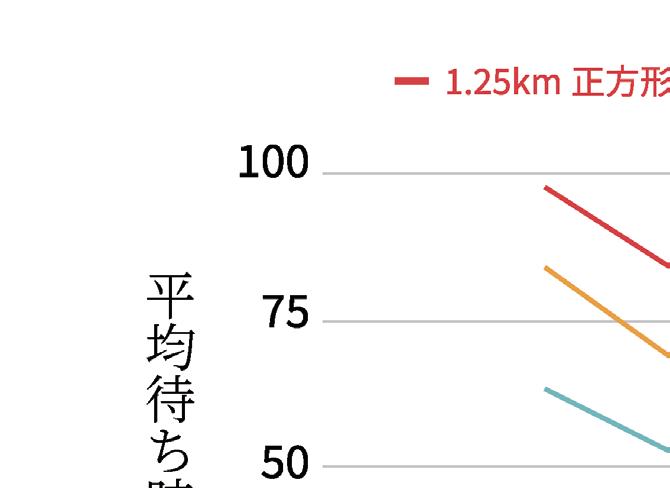
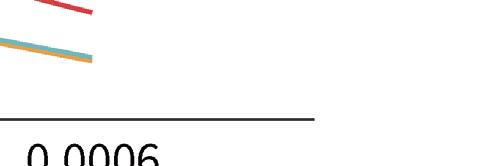
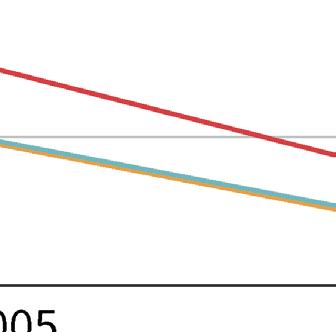
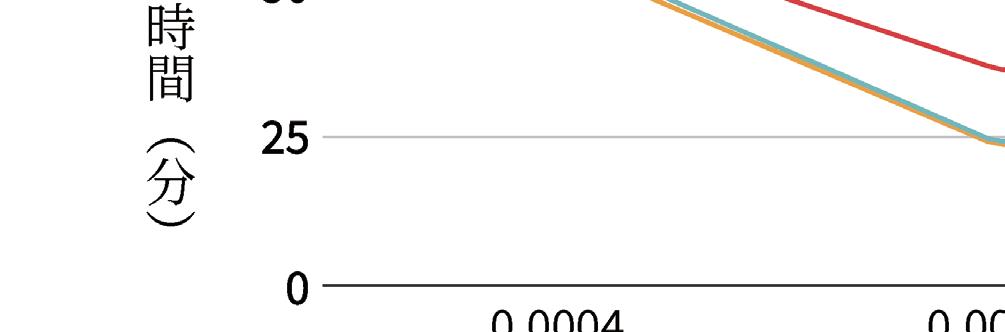
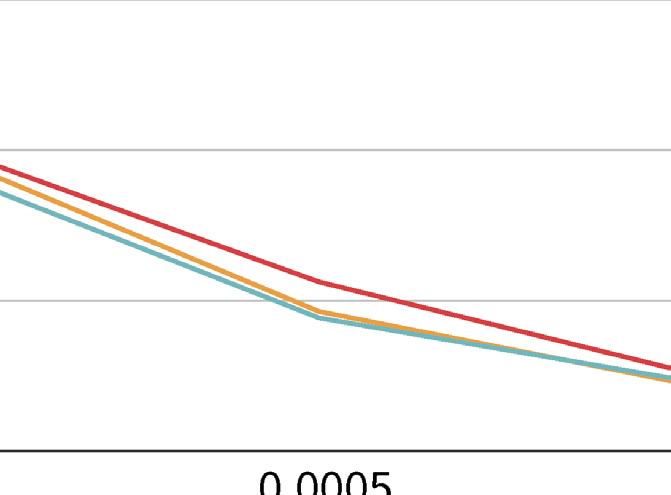
図8 都市郊外の一人当たりの車両数と平均待ち時間

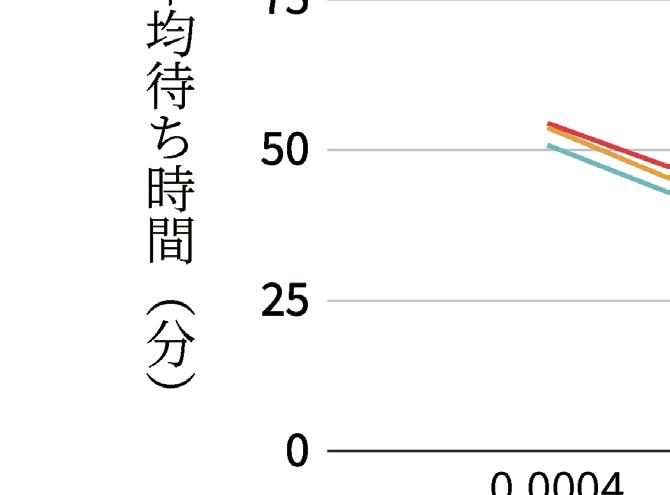
図9 地方都市の一人当たりの車両数と平均待ち時間

89
対数が少ないことがわかる。特に車両の絶対数が10台を下回る場合において、他 の場合と比較して約1.6倍から2倍程度に平均待ち時間が急増する傾向にある。ま た総需要量/車両数の値が大きい場合ほど、この平均待ち時間の値が、車両が十分 にある場合と比較して大きくなることがわかった。つまり総需要量/車両数が13.5 前後の場合、40分程度の差異が車両数が十分にある場合に対して生じるのに比べ、 総需要量/車両数が9前後の場合では15分程度の差異が生じた。逆に車両数が十 分にある場合においては、いずれの地域や範囲であっても類似した平均待ち時間を 取ることが確認された。
5.3.2 人口密度と領域範囲の関係性
正方形領域による範囲と人口分布による結果は、3.75km正方形領域など範囲 が広い場合ほど平均待ち時間が短くなった。計測前においては、人口密度の高い 1.25km正方形領域が最も移動が少なく、また面積あたりの需要発生総量が多いた め、待ち時間が短くなることが予測されていたが、前述のように車両絶対数が少な い今回の状況においては、その限りではなかった。一方で都市部や都市郊外におい ては、2.5kmと3.75km正方形領域による待ち時間は同一となった。したがって、 より大きな範囲やサービスの利用頻度が多い需要パターンで実験を行うと、人口密 度が高いエリアの方が待ち時間は有利になる可能性が高いと筆者は考える。
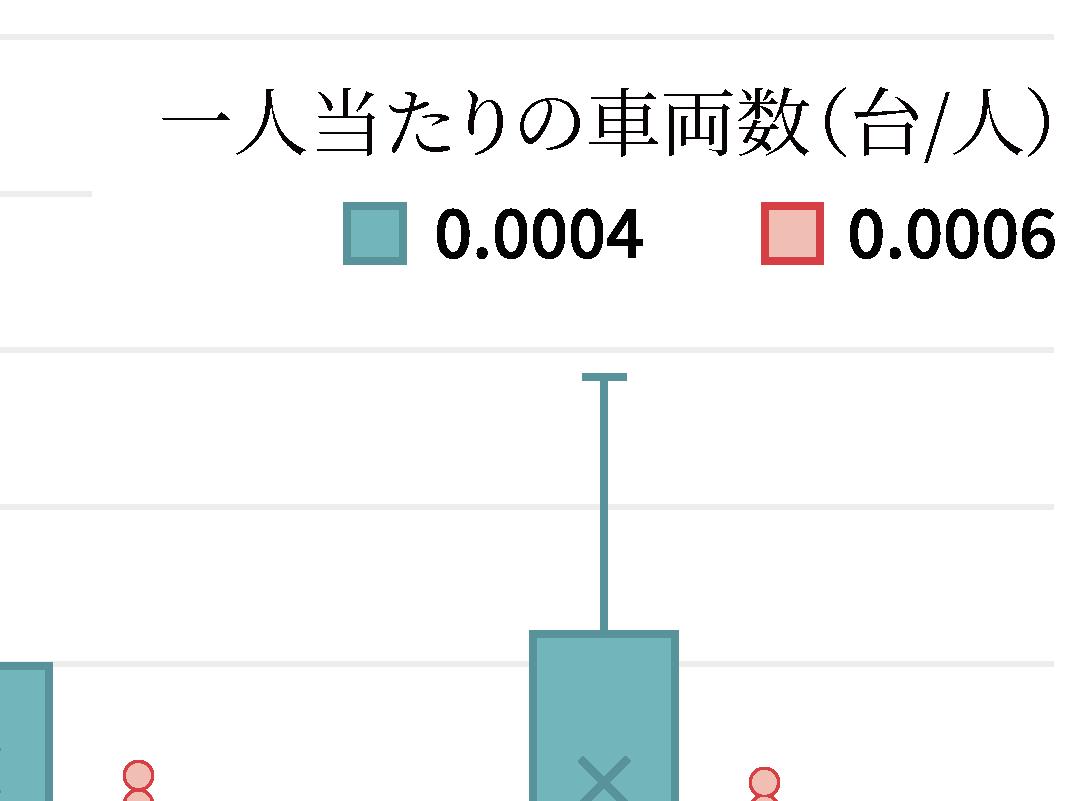
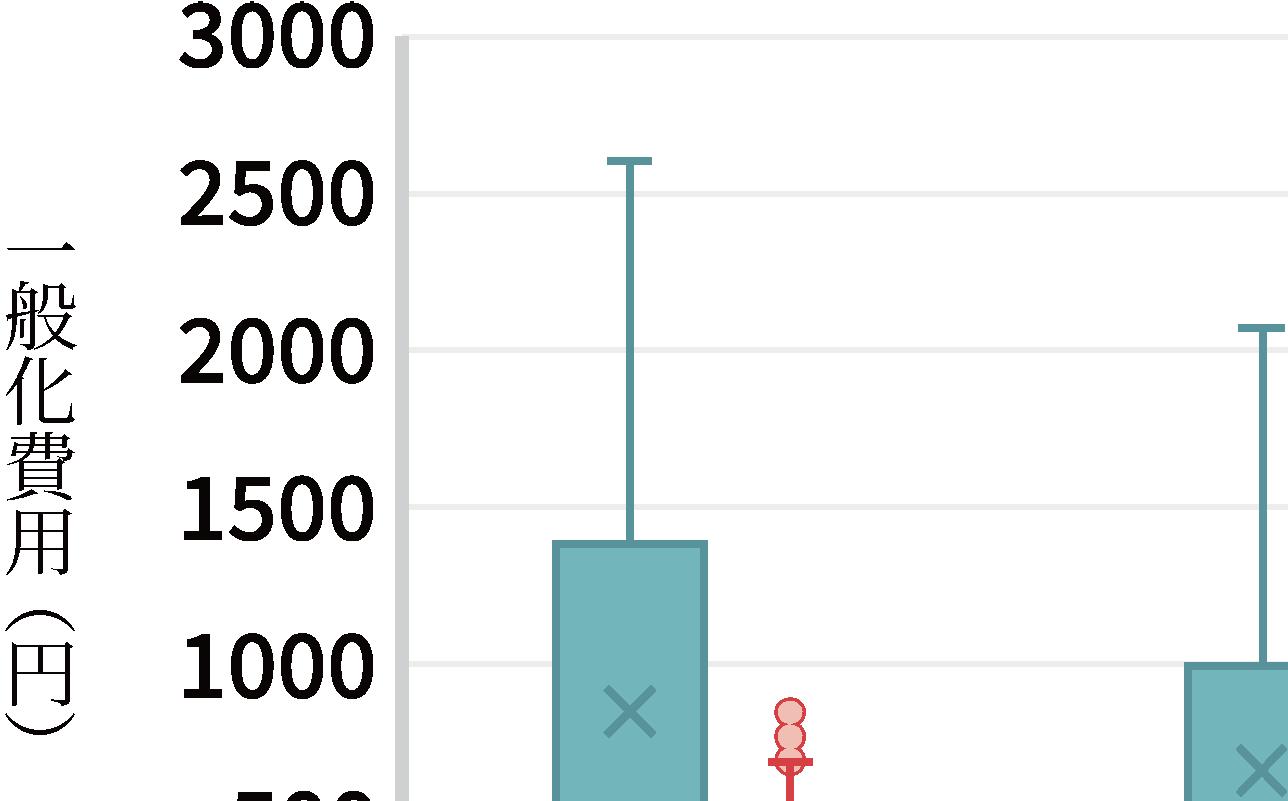
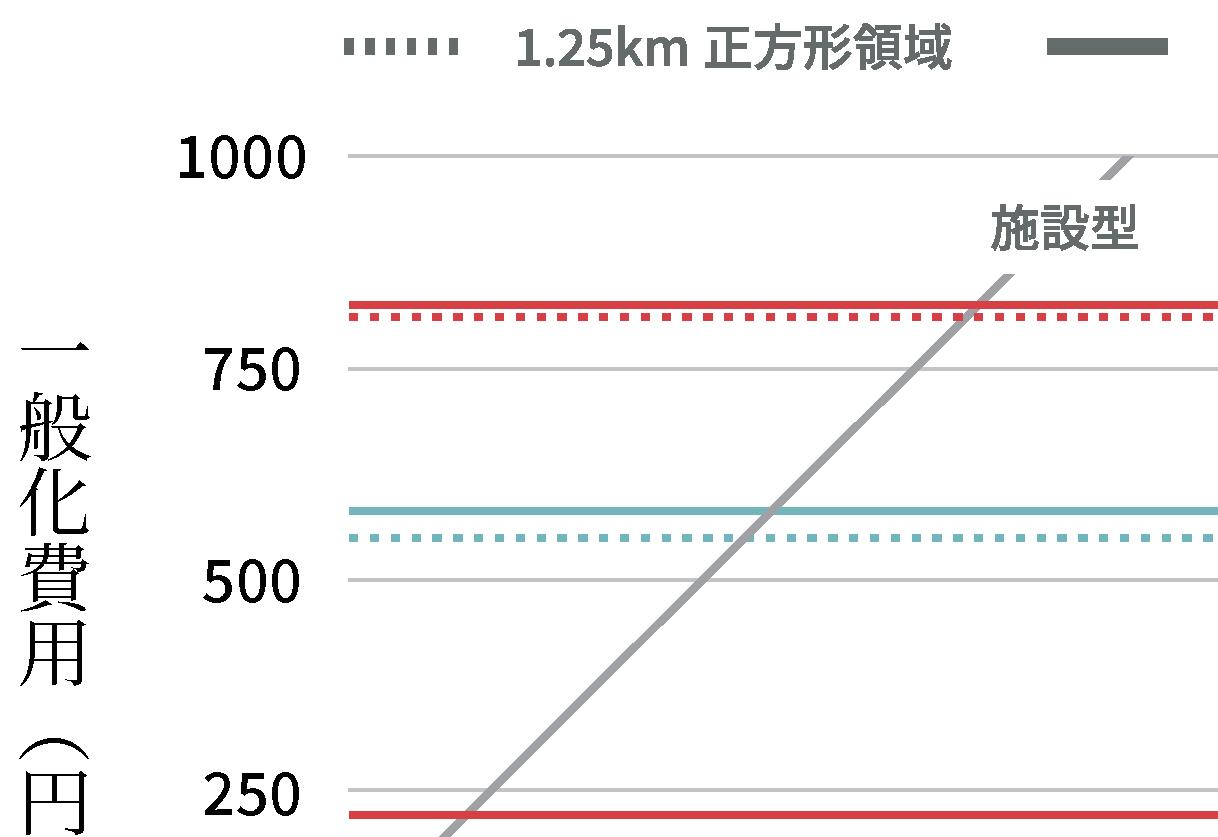
5.3.3 一般化費用と地域の関係性
次に図11より一般化費用に着目し、地域間の比較を行うと、最大値や中央値は 都市部>都市郊外>地方都市となった。一方で第三四分位数においては都市郊外が 1000円と、3つの地域内で最も小さな値をとった。この要因として、地方都市で は車両絶対数が少ないことから待ち時間が伸びやすく、都市部においては時間価値 が高いため(都心部分給:48.00円/分, 都市郊外:34.17円/分)、時間コストが 高くなったことが考えられる。 また一人当たりの車両数を0.0004台/人から0.0006台/人の1.5倍にした場合 では、最大値について都市部で2600円から848円に、都市郊外では2068円から 647円、地方都市では1912円から624円となった。中央値は都市部で552円から 152円、都市郊外で490円から127円、地方都市で401円から124円となった。 以上のように前章でも確認された最大値よりも中央値や平均値に対して車両数を増 加させた場合効果が大きいことが再確認された。
90
第五章 自動運転車によるサービス提供範囲の特定
以上のことから、人口密度自体の待ち時間に与える影響は移動時間が限られてい る今回の範囲では、認められなかった。また総需要量/車両数と待ち時間は比例関 係にあり、車両数が十分に存在する際には地域間の際は生じにくい。一方で、車両 の絶対数が少ない限られた範囲や一人あたりの車両数である場合には、待ち時間を 増加させる傾向にあることがわかる。
図10 平均待ち時間と車両数あたりの総需要量の関係
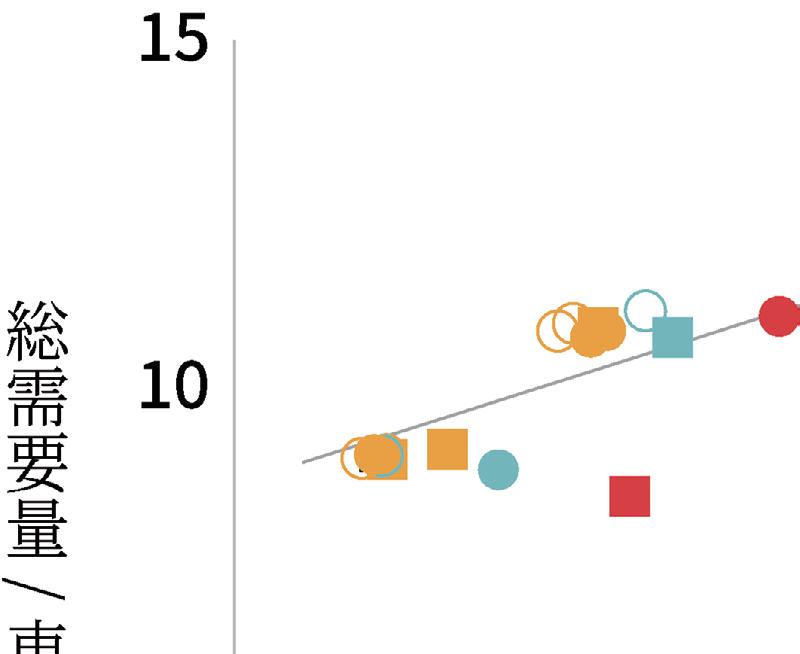
図11 地域と一般化費用の関係(3.75km領域)

91
5.3.4 提供範囲の推定
待ち時間による影響だけでなく、VOT(時間価値)を考慮した一般化費用を導 入することで、より詳細なサービス提供範囲について検討する。これに加えて、自 宅での待機時間に対する時間価値の変化が、どのように提供範囲に影響するのか考 察する。
まず提供範囲について考察をする(図12,13,14)。本研究では正方形領域全体に 利用者の住宅があるものとして考えているが、実際には最寄りの施設に行く方が、 一般化費用が小さければ施設に優先的に行くと考えられる。そこで施設型と自動運 転型の分岐点となる施設からの距離を提供範囲として捉え考察する。
都市部と都市郊外において、都市部の方がVOTがより高いため、一般化費用は 都市部で824円、都市郊外で682円となった。一方で分岐点を迎える施設からの 距離では一般化費用が都市部の方が高いにも関わらず短い距離となった。すなわ ち、都市部では0.0004台/人の自宅待機VOT30%において施設から650mとな り、都市郊外では757mとなった。地方都市においては、車両数が少ないことから、 平均待ち時間の差異がシナリオによって大きくことなったため、0.0004台/人の VOT30%の場合において1.25km正方形領域の場合は1150m、3.75km正方形領 域の場合は840mと開きが生じた。
また一人当たりの車両数0.0006台の場合では、自宅待機VOT30%の際にはい ずれの地域においても約100m-250mでこの分岐点を迎えた。本研究では、車両利 用金銭コストが導入車両数などによって変動することはなく、一律に設定されてい るため、車両数が十分に存在する場合には、より大きな一般化費用を要する可能性 がある。 領域範囲に対する影響として、都市部や都市郊外においては、1.25km正方形領 域の方が、3.75km正方形領域よりも一般化費用が30円前後下がることが複数の
第五章 自動運転車によるサービス提供範囲の特定
92
図12 都市部の一般化費用と施設距離

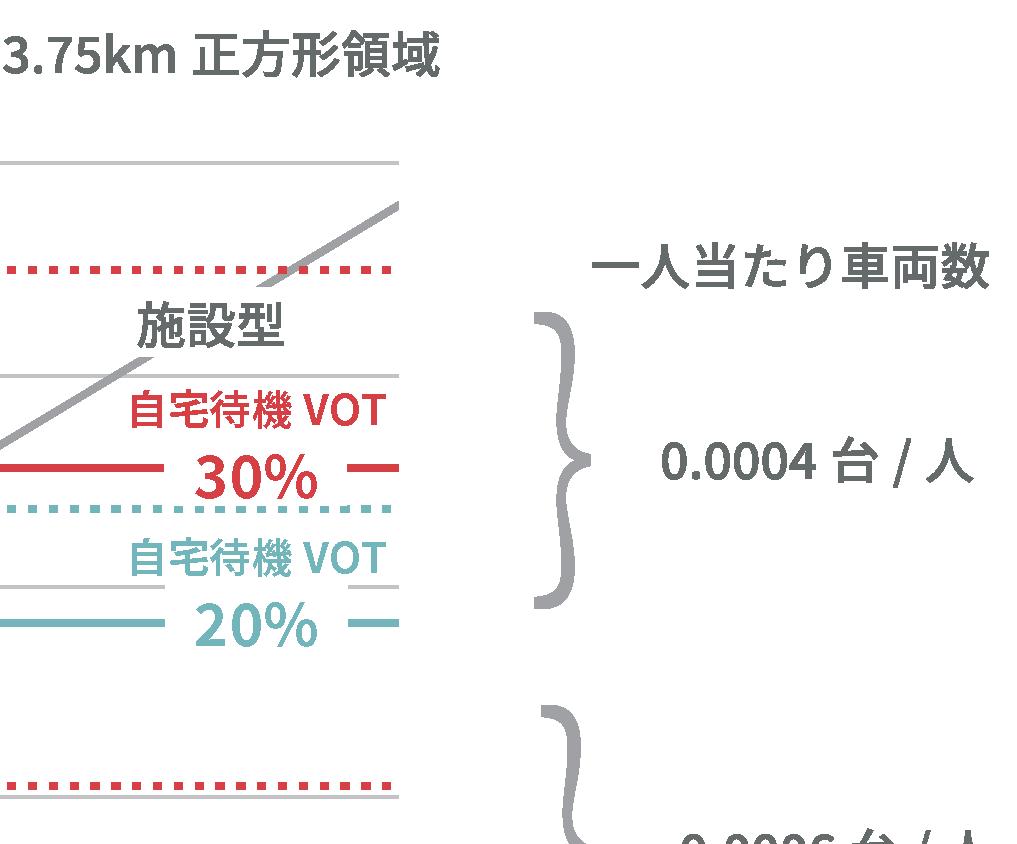

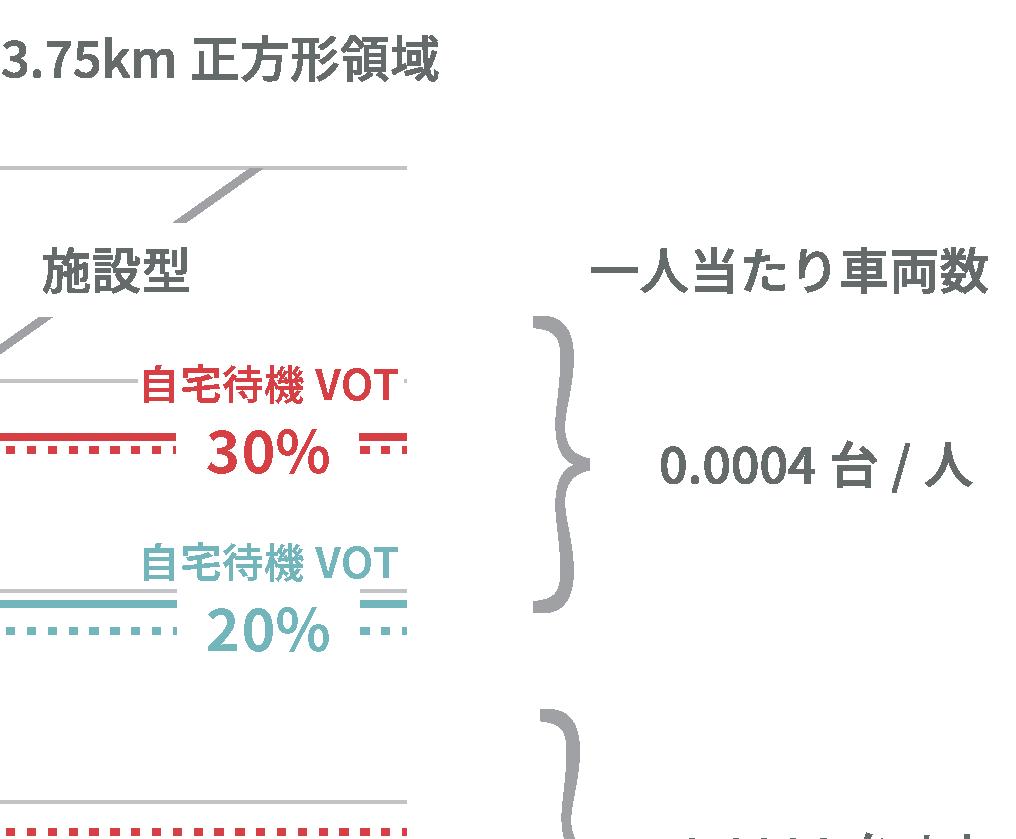

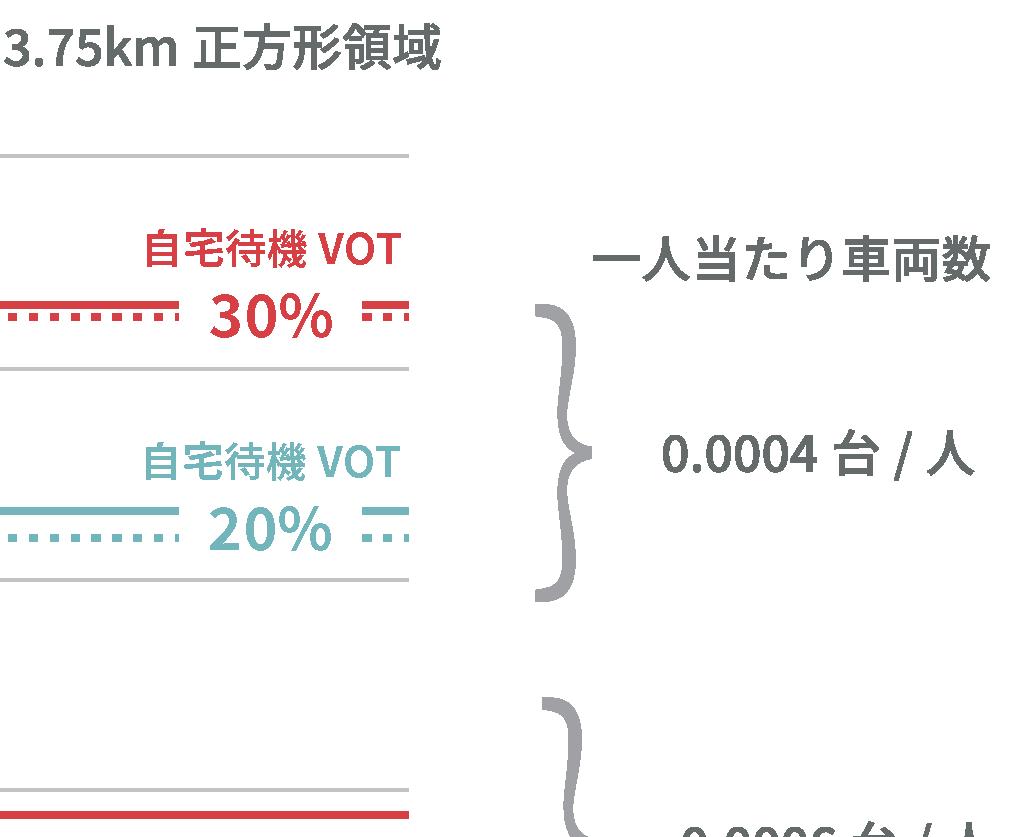
図13 都市郊外の一般化費用と施設距離
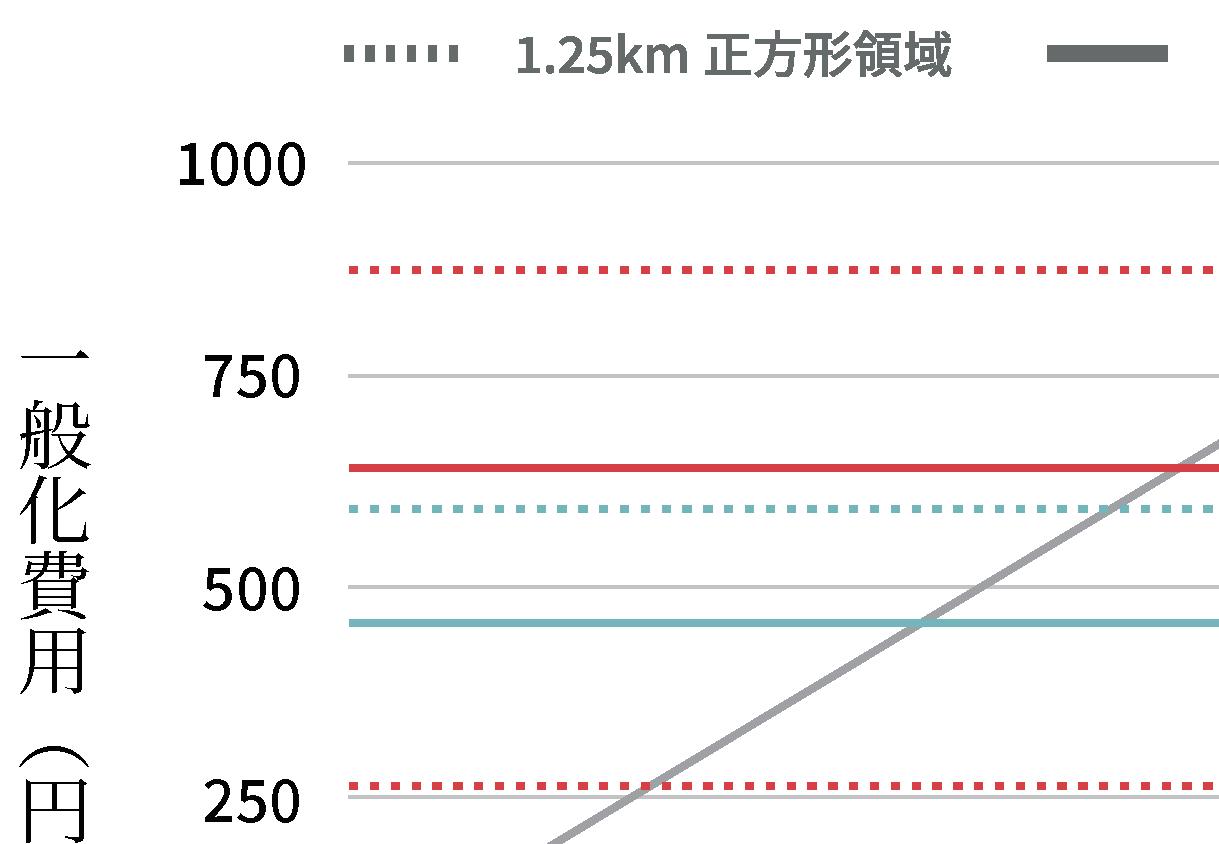
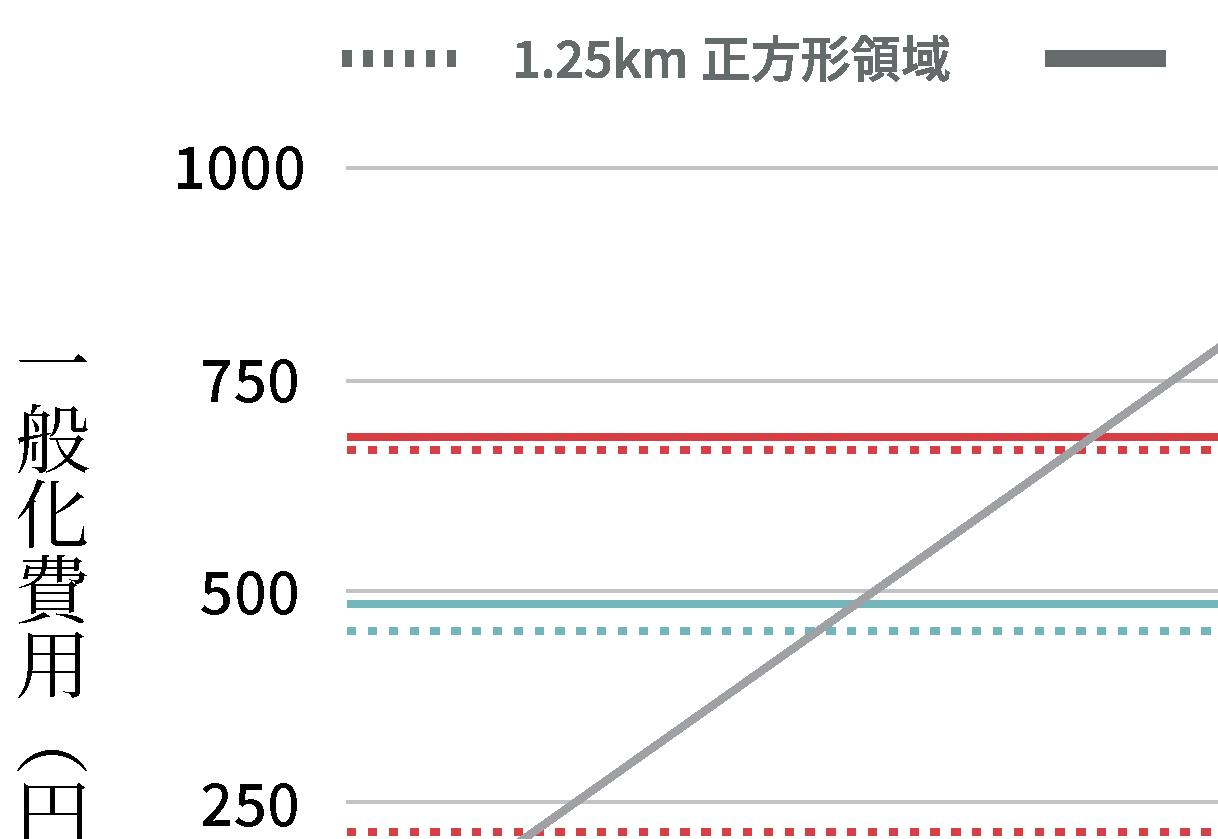
図14 地方都市の一般化費用と施設距離
93
場合において見られた。この要因としては、1.25km正方形領域においては、移動 距離が相対的に短く、この影響が寄与したと考えられる。
5.3.5VOTの変化による効果
次に自宅待機時間のVOTが変化することによる効果を検証する。一般化費用に 着目すると、都市部における3.75km正方形領域において自宅待機時間における VOTが30%から20%に下がった場合、一人当たりの車両数0.0004台の際には一 般化費用は824円から580円へと下がる。またこれを距離で換算すると650mか ら460m程度への変化である。一方で一人当たりの車両数を0.0004台から0.0006 台の1.5倍に増やした場合には824円から221円へと減少した。つまり自宅待機 VOTを軽減するより、車両数を増加させた場合の方がより大きな効果が得られる ことが確認された。この傾向は都市郊外や地方都市においても同様であった。地方 都市においてはこの自宅待機VOTが変化した際の効果が最も大きかった。
したがって、将来的に利用者がサービスに順応することによって自宅待機時間が より有効的に利用することができるようになった場合、施設型との分岐点がより施 設に近づくため、自動運転車によるサービス提供範囲は広がることが予測される。
5.3.6 小結
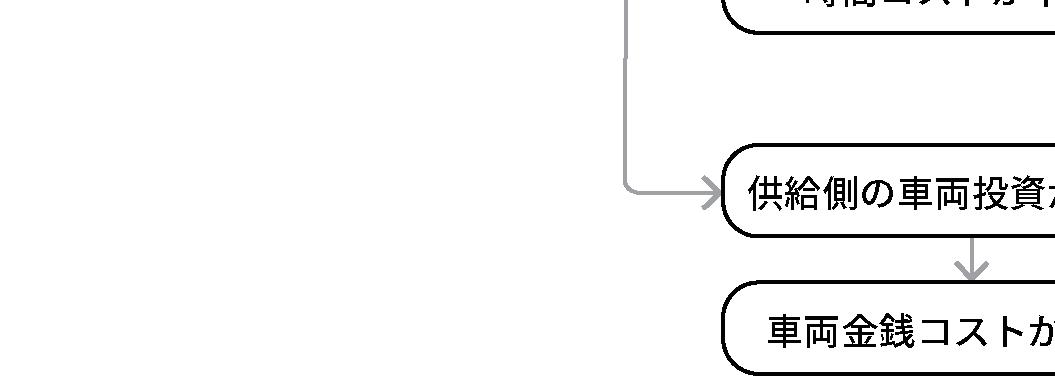
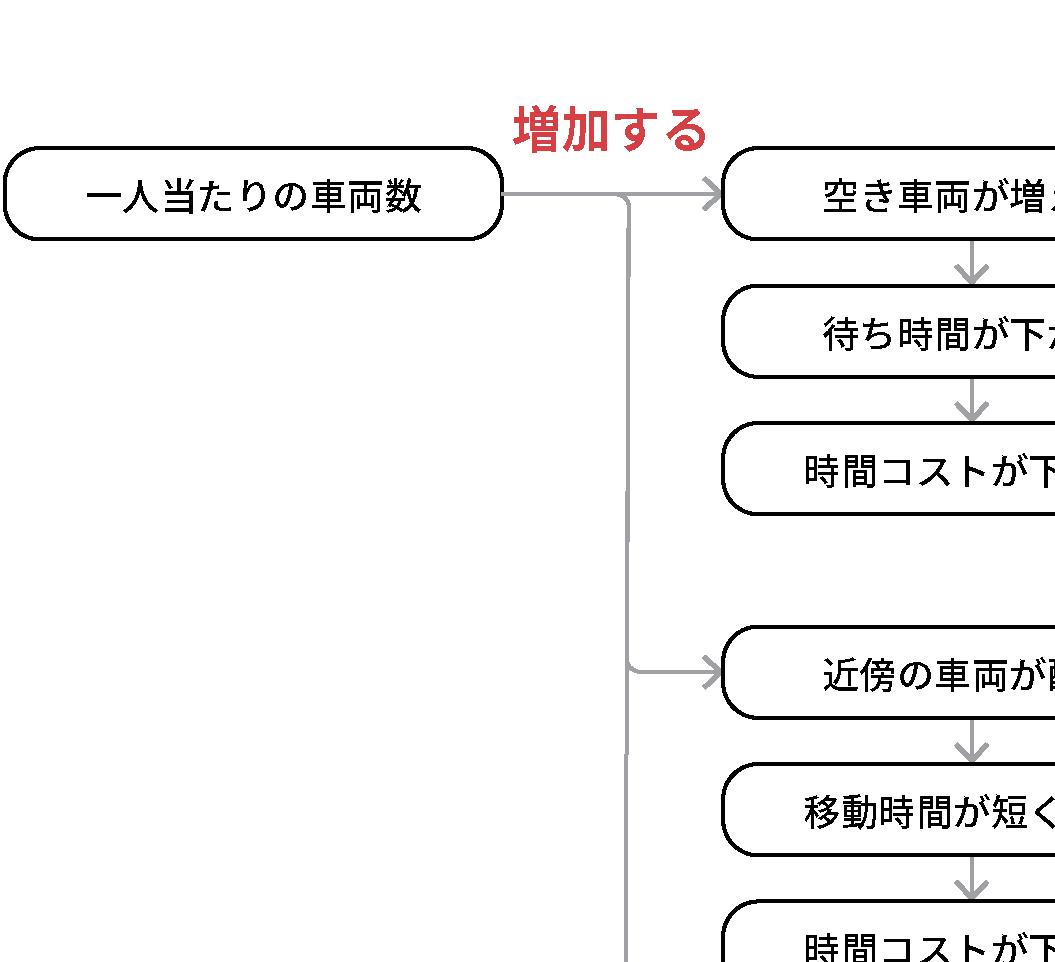
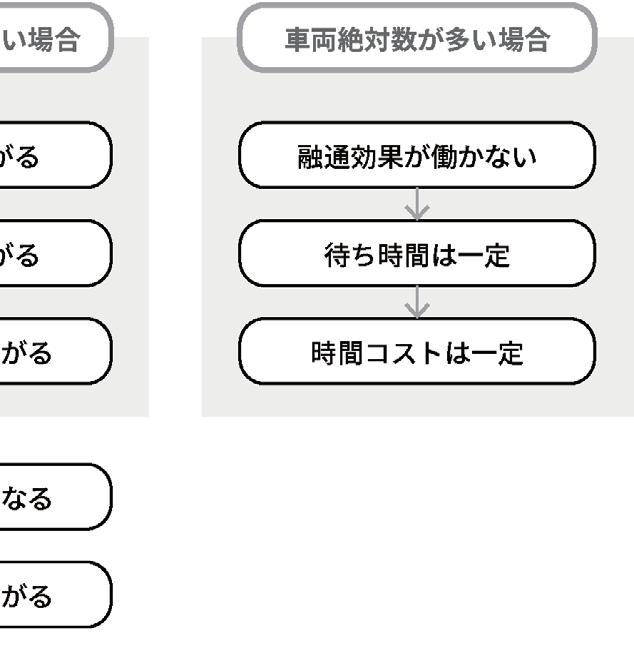
本章の結果から、図15のように、あらためて次の関係性が確認された。
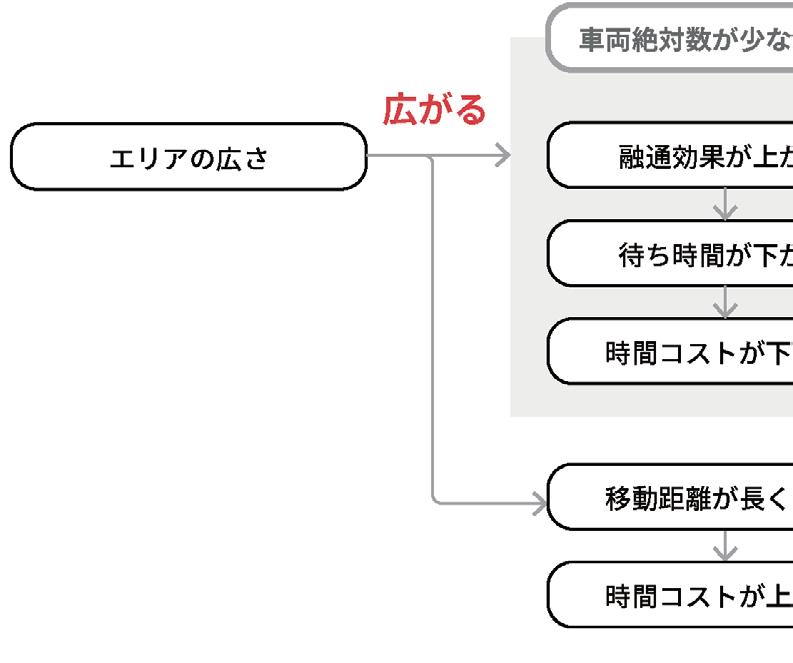
一人当たりの車両数が増えると、次のような結果が生じる。(1)空車が増加す ることにより待ち時間が下がる。結果として時間コストを減少させる。(2)近傍 の車両が配車することができるようになり、移動時間を短縮することができる。結 果として時間コストを下げることにつながる。(3)車両を増やすことにより、車 両に対する初期投資が増える。結果的に利用者に対して金銭コストが上がる。
エリアの広さを広げた場合、次のようなことが生じる。(1)車両の絶対数が少 ない場合、融通効果が生じる。この結果待ち時間が下がり、時間コストが減少する。 (2)車両の絶対数が多い場合い、融通効果が生じにくいため、待ち時間は変化し ない。したがって時間コストも変化しない。(3)エリアを広げることで、移動距 離が増加する。結果的に時間コストが増加する。 上記の関係性から車両数による影響がわかり、範囲が狭い事や、需要が集中する
94
第五章 自動運転車によるサービス提供範囲の特定
時間帯、さらに人口密度の低いエリアなど車両絶対数が低減することが多い場合に おいては待ち時間が急増する傾向にあった。特に車両絶対数が10台を下回った場 合、他の場合と比較して約1.6倍から2倍程度に平均待ち時間が急増する傾向にあっ た。逆に車両数が十分にある際には、地域や領域範囲に依存することなく、待ち時 間は一定となった。
また一般化費用に着目し、地域間の比較を行うと、最大値や中央値は都市部>都 市郊外>地方都市となった。一方で第三四分位数においては都市郊外が1000円と、 3つの地域内で最も小さな値をとった。つまり、待ち時間は地方都市>都市郊外> 都市部の順になるが、一般化費用はこの逆順となり、さらに第三四分位数では最も 都市郊外が低いということが明らかになった。 サービスの提供範囲の距離については都市部では0.0004台/人の自宅待機 VOT30%において施設から650mとなり、都市郊外では757mとなった。また都 心部では、自宅待機VOTが30%から20%に下がることによって、施設型と自動 運転サービスの利用に対する分岐点が650mから460m程度へ引き下がった。 以上のように、急激な待ち時間の増加を引き起こさないために、車両数に留意し ながらサービスの提供範囲を検討する必要性があり、車両数が十分に存在すること で地域差は解消されることがわかった。

95
図15 自動運転車のコストを決める要因と関係性
1. 経済産業省:特定サービス産業動態統計調査, 2019
2. ジムセントラル24神田:利用状況https://www.central.co.jp/club/gc24-kanda/staff_ voice/30925.html,(最終閲覧2022/08/05
3. ジムセントラル:パーソナルトレーニングhttps://www.central.co.jp/program/ptc/,(最終 閲覧2022/08/05)
96 参考文献 第五章 自動運転車によるサービス提供範囲の特定
97
98 第六章 本研究の結論および議論
過去の国内外における事例によって明らかになった 新たなモビリティの導入による都市の変化やシミュ レーション結果を通じて示されたサービス類型とサー ビス提供範囲についてまとめる。また最後に自動運転 車を導入した都市開発を行う際に検討する必要性のあ る項目について議論する。
99
第6章: 本研究の結論 および議論
6.1.1 シミュレーションの結論
本研究の結果、既存の施設自動運転車が代替する場合、次のようなことを考慮す る必要性があることがわかった。
① サービスの需要パターン
全ての住民が週1回程度利用するサービスのシミュレーションを行うと、需要パ ターンの比較を行うと需要集中>需要ランダム>需要分散の順に待ち時間が長くな り、また平均待ち時間は需要集中においてその需要分散の5倍程度の時間を要する ことがわかった。
② 車両数
全ての住民が週1回程度利用するサービスでは、施設型の往復移動時間と同等 の待ち時間に必要となる車両数は集中型において約0.0068台/人、ランダム型に おいては約0.0058台/人となり、分散型においては0.0050台/人未満であること がわかった。さらにこの車両数と既存のサービス、タクシーの台数を比較するとラ ンダム型と同等の車両数を行うためには2.9倍程度の車両数が必要であることがわ かった。 一方でフィットネスクラブなど、利用者が限られているサービスでは約0.0005 台/人と1/10程度に車両数を抑制することがわかった。
100
第六章 本研究の結論および議論
地域差は領域範囲内における車両数が少ない場合に平均待ち時間として生じるこ
6.1 研究の結論
③ 地域
とがわかった。特に車両の絶対数が10台を下回る場合において、他の場合と比較 して約1.6倍から2倍程度に平均待ち時間が急増する傾向にあった。したがってこ
のような状況は、地方都市など人口が需要量に対して少なかったり、また領域範囲 が1.25km正方形領域など狭い範囲の場合であった。逆に車両数が十分に配置され ている場合、地域差は大きくは生じないことがわかった。また本研究は最大の領域 範囲が3.75km正方形領域であったため移動時間が少なかったこともその理由の一 つとして挙げられる。つまり地方都市がより不利な状況になり得る。
また一般化費用からは最、大値や中央値は都市部>都市郊外>地方都市となった が、第三四分位数においては都市郊外が1000円と、3つの地域内で最も小さな値 をとった。この要因として、地方都市では車両絶対数が少ないことから待ち時間が 伸びやすく、都市部においては時間価値が高いため(都心部分給:48.00円/分, 都市郊外:34.17円/分)、時間コストが高くなったことが考えられる。
④ 施設からの距離
サービスの提供範囲の距離については都市部では0.0004台/人の自宅待機 VOT30%において施設から650mとなり、都市郊外では757mとなった。また都 心部では、自宅待機VOTが30%から20%に下がることによって、施設型の往復 時間と自動運転型の待ち時間から求められる、利用に対する分岐点が650mから 460m程度へ引き下がった。 また、この結果は現状のバスや移動販売車を用いたMaaSなどにも適用できる
101
と考えるが、一方で本研究などで取り扱った長時間に渡る個人利用でのサービスに おいては、車両利用金銭コストとして人件費が余分に生じることとなる。したがっ て、本研究から導き出された既存の施設との関係性を考えると、普及により価格の 抑制された完全自動運転車を使用する必要がある考える。
6.1.2 過去事例の結論
海外事例
鉄道や自動車によるネットワークが外部の都市と結ばれているが、独立した環境 下に理想的な居住環境を構想している事例が田園都市やブロードエーカーシティ、 工業都市、近隣住宅論などで見られた。一方でこれらの都市では、生活サービスを 支えるだけの人口がなく、結果的に外部の都市に依存しているとの指摘もあった。
これに対しコルビュジェはインフラのあり方自体をデザインし、その結果として 生じてくる建築や都市のあり方をデザインしていた。
したがって今後はこの良質な住環境の規模感を参照しながら、自動運転車による 生活サービスの成立する状況の検証が必要であると考える。
日本事例
日本においては道路インフラの整備が遅れたことにより、鉄道中心の都市構造が 描かれてきた。この結果として駅中心の沿線開発が行われ、求心性の高い副都心が 構成された。第二次世界大戦以降は鉄道網だけでなくより多くの輸送能力を手にす るため高速道路を中心とした、道路インフラの強化が行われた。この新たな都市構 造物を活用するため、「スカイビル」や「東急ターンパイク」などが検討された。 一方で、海外の事例を踏襲した形とも言えると考える。 丹下健三は通勤などによって生じる、都心と郊外に対する人口動態を定量的に検 討しながら、立体的な人の動線を検討した「旧東京都庁舎」や広域での都心部と居 住地の関係性を捉えた「東京計画1960」にて独自の建築のあり方を提唱した。 この日本特有な求心性の高いい鉄道と駅を生かしつつ、分散的な自動運転による 生活サービスの計画を行う必要があると考える。
第一章 タイトル|タイトル
102
6.2.1 今後の研究発展に向けて
本研究では、利用者の便益について時間価値に着目することで評価を行った。一 方で供給側にとっても、これまでの施設でのサービス提供とは異なる施設・設備投 資を行う必要があるため、これらに着目して検討を行う必要があると考える。また 利用者の便益を考える際にも施設規模による魅力度の導入や、予約システムの導入 などによる待ち時間の緩和などの検討も行う必要がある。
地域間における差異を明らかにする手法として、本研究では人口密度や平均所得 を用いて検討を行ったが、より詳細に行うためには道路ネットワークや渋滞の発生・ 緩和に伴う効果、移動距離の延長、ロジスティックス拠点の配置、さらには駐車空 間などに対する要素を導入することにより、地域の固有性について検証することが できると考える。
6.2.2 今後の都市開発に向けて
ル・コルビュジェがモビリティの変化に伴い、新たなインフラ網と建築のあり方 を定義していることが2章からも明らかになったが、自動運転車が導入される際に も同様の機会が生じると筆者は考える。またような変化が起こる際には、細分化さ れた専門領域ではなく、領域を横断・統合することで新たな建築像や都市像が浮か び上がると考える。本研究から予見された4つの階層が見えてくる。
103
つまり(1)超広域での既存鉄道インフラと高速移動網(2)歩行圏での自動運
に日本では(1)の要素が強いことから、その他の項目にも独自性が生じると考える。 したがって、他国と同様の自動運転車両を利用したとしても、独自性のある都市開 発が行えると考える。 6.2 今後に向けて
転サービス(3)歩車空間の再編成(4)自動運転に対応した建築様式である。特