This portfolio showcases the synergy of computational design, robotics, and high-tech in architecture, highlighting a journey where technology reshapes traditional architectural paradigms. Computational design, with its algorithmic prowess, brings forth a new era of precision and innovation, allowing for the creation of complex and sustainable structures that meld aesthetics with functionality.
Computation aided design and Robotics emerges as a pivotal force, translating digital models into physical realities, showcasing how automated processes and robotic arms are not just tools but integral components that realize intricate and once-unfeasible designs. This integration exemplifies a shift towards efficient and precise construction methodologies.
High-tech advancements further propel this architectural evolution, integrating artificial intelligence, virtual reality, and smart materials to produce buildings that are not only structures but living entities capable of adaptation and learning. These technologies catalyze a new architectural ethos, where the built environment is responsive, sustainable, and intimately connected to human experience.
This collection is a narrative of how computational design, robotics, and high-tech are not merely adjuncts but foundational elements that drive the future of architecture, creating spaces that are not only functional but experientially rich and forward-thinking.
ROBOTICS PROGRAMMING
PETG LOCALIZED THERMORFORMING
Jarlshof Caretaker's House, 2019
MEGA POLYHEDRON
robotics clay printing,2023
HEXAGONAL TESSELLATION FACADE
robotics clay printing,2024
AGGREGATE/VOLUX
Form Algorithm, Robotics Plastic Printing,2023
INTERACTIVE PICK AND PLACE
Advanced Programming, 2024
ROBOTICS DEPTH SCAN DRAWING
Advanced Programming, 2024
PARAMETRIC ARCHITECTURE
AUTONOMOUS VILLA
Jarlshof Caretaker's House, 2019
TIMBER PLEATED ICE-HOUSE
Wood detection and structure,2023
LONG-SPAN THEATER
Theatre Complex, Large Span Design, 2017
BESPOKEN ZENVO FACTORY
Reconstruction of SUPERCAR FACTORY, 2017
COMPUTATIONAL RESEARCH
ARDUINO INTERACTIVE SYSTEM
Cyberphysical System,2023
GOOGLECOLAB PROCESSING
Machine Learning,2023
RHIZOMATIC MAPPING
Form Algorithm, CNC, 2020
ALL-IN-ONE
Cyberphysical System, 2018
L OCALIZED ROBOTICS
HERMOFORMING
ACADEMIC, Group Work, 2024 [Thesis Project]
Supervisor: Robert Stuart Smith (Email: rssmith@design.upenn. edu)
Partner: Claudia Campuzano, Yang Meng
Robotic thermoforming process that involves localized heating and manipulation of thermoplastic sheets; this labiates the need for molds in the thermoforming process.Our exploration extends to speculative design for building envelopes, where we investigate the aesthetic and production implications of a gesture-based approach to robotic thermoforming. This research offers a perspective on ornamentation and envelope design. proportions, composition, and elements, and then creating a Bespoke architecture.
○ Robotics Heating Path
The effectiveness of the heat gun is influenced by various factors, including the heating path, the distance between the heat gun and the PETG sheet, and the speed at which the heat gun moves. What is Interesting is that we discovered that different heating paths produce varied effects.
To minimize failures and enhance efficiency in thermoforming, precise control over the temperature of PETG sheets is essential. PETG’s glass transition temperature (Tg) is 84°C (Focke et al. 2009), where it becomes pliable and solidifies upon cooling. We incorporated an infrared sensor and an Arduino UNO module to facilitate the collection and analysis of temperature data. As depicted in , 1/16" thick PETG material reaches the Tg in about 30 seconds and becomes suitable for thermoforming upon reaching 135°C. The entire process takes approximately one to two minutes.
○ Parametric Heating Path and Forming Path Tests
We further categorized and parameterized forming paths into gestures such as pushing, tilting, rotating, and translating along straight or curved lines, creating complex paths like tilting angle rotation, tilting angle translation, etc. Utilizing data from previous experiments, we conducted additional tests on robotic gestures to refine our parameter catalog.
○ Robotics Dual-End Effector Design
Tool Definition & Heating Forming Path Script
Cyberphysics Thermal Control
In this experiment, our goal is to investigate the following question: How can we use our heating tool to generate a gesture-based approach in our design? Within this study, we utilize Grasshopper to achieve more control and precision in the parameters.
Applying knowledge gained from 2.3, the robotic fabrication setup from 2.2 was extended through the addition of a new dual-head EOAT that consisted of the 3-prong forming tool and Experiment 2.3 selected heat gun. An infrared sensor was also incorporated to provide feedback on a PETG sheet’s temperature during heating. A larger PETG sheet size of 24” x 36” and 1/16” thickness was employed and clamped in between two layers of wood in a vertically orientated 22” x 40” frame.
A closed-loop approach to iterative, multipass localized robotic heating and forming of PETG thermoplastic sheets was developed and evaluated for its ability to produce custom-formed parts that embody several different ornamental features formed from different draft angles (angles of incidence). The method incorporates temperature sensor feedback during localized heating and explores different patterns and quantities of robot tool-path motion for both heating and manipulation-based forming. A robot milling routine is also incorporated to support the manufacturing of sheets with a variable boundary shape. A series of heating and forming approaches are tested and evaluated within the robotics facility using an ABB IRB 4600-60 tracked robot.
A simulation workflow was developed that served as a predictive model for robotic thermoforming and acted as a feedback loop throughout our process (Figure 15). More importantly, it enabled our design speculation of building envelopes that would not be possible otherwise. To evaluate the ability of the simulation to represent manufactured outcomes, a series of PETG sheets were physically formed and 3D scanned using AESUB Blue 3D Scanning Spray to ensure the visibility of the transparent sheets during scanning. (Figure 16) Scan results were compared to digital simulated outcomes of the same robotic manufacturing operations. Deviations between the simulation and physical outcomes are depicted in Figure 17. Visual observation also indicates that simulations did not capture all small-scale details apparent in the physically manufactured parts but were effective at describing overall formal descriptions and character of each manufactured part, making the simulation suitable for use in design activities prior to fabrication.
○ Simulation & Calibration Script
Calibration Dual thermoforming Milling
Thermoforming Process Milling-Spindle
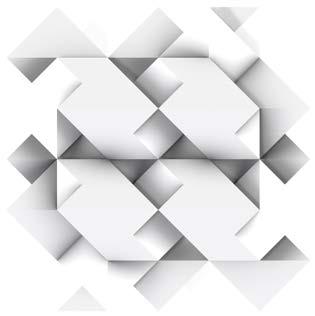
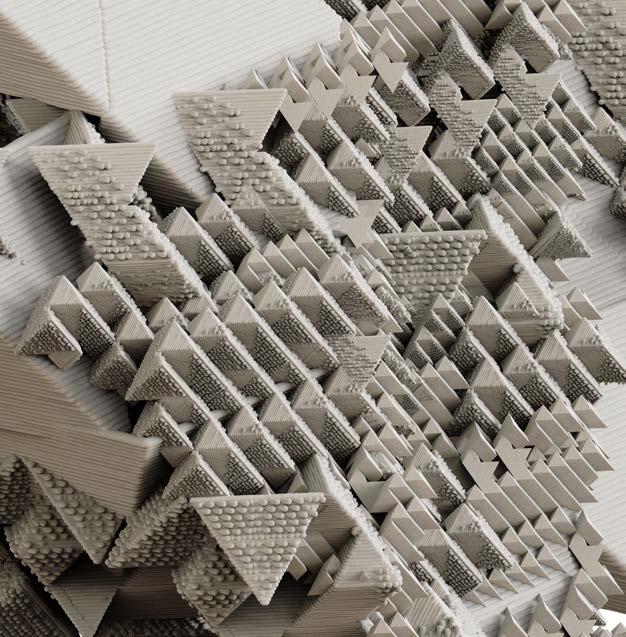
We applied the developed localized heating and robotic manipulation thermoforming process to a multipart prototype measuring 1.6m in height and 0.8m in width, consisting of five custom-shaped and formed PETG sheets. Each panel underwent between 5 and 7 local robotic thermoforming operations. Customized heating and forming curves were designed for each panel shape. Adjacent heating regions partially overlapped to ensure that each forming operation could interact with and merge together to produce an overall coherent and complex thermoforming pattern-like effect. The forming paths use progressively increasing tilt angles and translation curves that aligned to the curvature of the panel's boundary curves and were constrained to lengths ranging from 4-7 cm, ending each translation curve
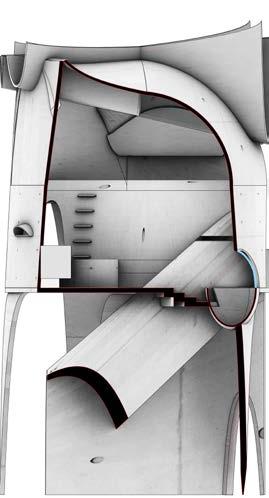
This aimed to produce an implied directional grain in the formed outcome of each panel. Through these multiple, localized heating and forming operations, the deformation appears to visually intensify towards the top of the prototype, with precisely graduated parameters that follow the prototype's geometric curves and flow patterns. Data on the entire prototype’s manufacturing process was recorded and resulted in an overall work-cell sheet calibration time of 48 minutes, an overall heating time of 48 minutes, a shared forming time of 37 minutes 20 seconds, and a milling time of 14 min. Time and energy consumption of each panel of the prototype
As the prototype’s irregularly shaped panels were differentiated in forming patterns, but similar in kind, identifying and aligning panels during assembly of a larger envelope would be challenging. Augmented Reality (AR) was explored as a means to support human assembly operations. Using our thermo-formed simulation, we generated geometries for fabricated parts and imported these as 3D models into Unity with a series of joints. This Unity model was exported to the Touch Base AR software, a markless AR software that uses ARKit and Simultaneous Localization and Mapping (SLAM) for 3D cartesian position tracking. Interactive buttons toggle joint visibility, enhanced by animations that highlight locations for easy identification and placement. The resulting model displayed seamlessly overlaid in real space, aligning virtual and physical components and joints precisely, streamlining the assembly of complex structures without manual measurement.
We also utilize augmented reality technology to preview facades on existing buildings. This system includes interactive controllers, allowing each panel to be hidden with a click in the user interface. Users can design the position and number of facade panels themselves, making it easy for non-designers to get started and act as designers, customizing facade renovations.
T IMBER P LEATED I CE-HOUSE
ACADEMIC, Group Work, 2023 [1st Semester in Master]
Our design journey focused on seamlessly integrating our fabrication insights into diverse spaces, creatively utilizing pleated structures to shape environments. Instead of confining pleats to roofing, we merged them with the ground, sometimes integrating them into furniture or circulation. This approach generated unique spatial experiences rooted in our fabrication ethos, blending innovation with tradition. Pleat intensity defined privacy, while openness delineated public areas. The interaction between elements like stairs and pleats bridged conventional architecture with our innovative approach. In parallel, Patrick's project harnessed robotic fabrication and machine learning to autonomously identify materials, revolutionizing construction in challenging environments, pushing architectural boundaries.
TIMBER OBJECT DETECTION ON CUSTOM MACHINE LEARNING & WOOD DETECTION
Render with different lightings
Render with different Environments
How can we construct intricate buildings in remote areas with extreme environments, such as our project? While robotic fabrication presents a promising solution, the challenge lies in achieving this solely through digital fabrication. This is where the merging of machine learning and robotic fabrication can be crucial. The central question revolves around the utilization of robots to autonomously assemble a structure in a remote location without human intervention. This approach would involve prefabricating the components and disploying them on the site alongside robots that are capable of distingusing speficic materials, in our case wood, in any environment.
To enable this, generating a machine learning model capable of detecting wood in various environment becomes necessary. The intial step consists of training the model model by inputting a large library of images in various environments and manually indicating the wood in each of the images. However, manually drawing a rectangle around thousands of images can be a very time consuming process. The objective is to streamline this process by leveraging a rendering engine that can generate not only thousands of frames with diverse views, lighting, and backgrounds but also provide the material ID for each image. This approach optimizes the training process, eliminating the need for manual highlighting of wood in every single image.
YoloV8 & Roboflow
YoloV8 interferance with Custom Model - Custom Training
APPLYING THE SYSTEM IN A TIMBER PLEATED STRUCTURE ICE-HOUSE
KIT-OF-PART
The project's facade employs an innovative laminated bending wood technique. Through experimentation, a combination of softwoods (pine, Douglas fir) and hardwood (oak) was achieved, resulting in a structure that is flexible in the middle and sturdy on both sides. The first bend is realized by placing the woods in a zigzag pattern inside the first wooden mold. After sanding, a second bending is achieved using a robotically controlled hot wire to cut foam molds. The final step involves assembling the pieces together.
Living Room
P OLYHEDRON C LAY R OBOTICS P RINTING
ACADEMIC, Group Work, 2023 [1nd Semester in MSD-RAS]
Supervisor: Saunders, Andrew <asaun@design.upenn.edu>
Partner: Shenaia Kaylion Turner, Yang Meng, Riddharth Jain
From studying Robinson Fredenthal’s “Black Forest” prototype, we gained a deeper understanding of polyhedra and geometric composition. The unique abstraction and iterative characteristics of geometric elements will form various results through different sequences and organizations. In the practice, 3D printing these polyhedrons with a robotic arm, I learned about the entire process, from filling clay printing to bisque firing, and how to adjust the input data to form different printing effects.
Today, incorporating robotics and autonomous systems nudged us into exploring new angles to the piece, except for just the geometry as an element. Being able to formulate new ideas to enhance or elaborate on the essence of the geometry is made easier by, for example, defamiliarization and using the relief pattern to highlight the spiral in our design.
With the use of ABB IRB4600-60 robots with clay end effectors to produce clay bricks, we were able to test, create, and recreate multiple directions for the project.
A complete design was formulated based on the arrangement logic of Fredenthal, which fuses octahedrons and tetrahedrons and then divides the piece into printable, stable, smaller groups of tetrahedrons and octahedrons for clay extrusion.
In about 8 weeks, we understood how the material (clay) acts when extruded from a 6mm nozzle vertically down. The amount of slope required for a stable extrusion, the speed of extrusion, and the moisture content in the clay are all actants for the piece. The physical properties of clay change after drying and more after bisque firing, which were factors to be considered prior to extrusion.
This studio opens the territory to understand the material and use it for the benefit of exploring more using the robot. The geometry in itself is a design guiding factor and imposes a strong influence on the viewer if fused systematically. Robot
PREPROTOTYPE - MICRORELIEF
Fredenthal work was governed by stable tetrahedrons and octahedrons in combination as a space-filling triangulated network. In geometry, a tetrahedron, also known as a triangular pyramid, is a polyhedron composed of four triangular faces, six straight edges, and four vertex corners. The geometry is stable as a geometry, which is given by angles of 60 degrees with all sides of the same size divides the weight in equal proportions via all sides to the base edge. Space-filling is the packing of 3-dimensional bodies in an infinite array such that all the spaces are occupied without the intersection of contiguous cells. The diagram below helps us understand the concept in linear space packing.
The process integrates robotics, Grasshopper, and RobotStudio to accomplish printing. Initially, a group of components is established in Grasshopper, where both external and internal support breps are inputted. The model is then transformed into printable paths, and images are projected onto various surfaces to create micro-relief effects. Subsequently, the printing paths are decomposed into points and TCP (Tool Center Point) Planes, which serve as the robot's Target Planes. A 4600 Floor robot is selected for robot setup and simulation. Following the simulation, RAPID code is exported and transferred to RobotStudio, and then to the robot to complete the printing process.
Final interactive prototype, we used Camera(sensor) and 6 Neopixel light belts (actuator) to animate our architectural form through human and environment color interaction. Our sensing and actuating circuit were artfully hidden within and designed in coordination with our project. (We used Arduino IDE as the platform to develop the code.)
The courtyard design is rooted in Robinson Fredenthal's infinite grid system, giving rise to an ever-expanding array of geometric shapes that converge into a unique spatial forest - the Robinson Fredenthal labyrinth. This intricate layout merges positive and negative geometric forms, seamlessly interweaving upper and lower spaces to create an engaging journey for pedestrians. In terms of construction, large blocks are subdivided into 750mm, 1500mm, 3000mm, and 6000mm modules, while smaller bricks follow suit. The diagonal orientation of these components adds depth and spatial dimension. The saddle joint remains a key connection method, with brick sizes transitioning from small to large, imparting varying density to the building's façade.
During a three-day workshop with Studio RAP's Lucas ter Hall students in the UPenn's MSDRAS, M.Arch, and AAD programs created sample green facade panels.
MICRO-RELIEF PATTERN & IRRIGATION SYSTEM
Our team focused on created a two large geometric components with 60-degree angles and visually extruding curves that are used for water distribution. Openings were then placed within the shape for planting. The hexagonal tessellations provide a changable system of different aggregation way of combinations.
MICRO-RELIEF PATTERN & IRRIGATION SYSTEM
A micro-relief was projected onto the shape where the normals are extruded 3mm to limit the amount of water distribution to the plants. Because of the size and geometric shape support was added to the interior of the clay components. It is designed in a figure 8 style as a way to break up the interior and distribute water.
2024 Digital Craftsmanship with Clay Printing Workshop
MICRO-RELIEF PATTERN & IRRIGATION SYSTEM
Digital Craftsmanship with Clay Printing
A UTONOMOUS V ILLA
ACADEMIC, Individual Work, 2020 [1st Semester in Master]
Site: Jalshof, Shetland Island, England | Caretaker's House
In the ruins on Shetland island, a caretaker house was required to be designed. The caretaker was derived from a science fiction Neurosorcer. I captured the beauty of nature and integrated them into this villa, to heal the loneliness and melancholy of the client. An autonomous villa was comprised of a series of well-organized arch spaces, which was generated by a series of geometric evolution, in order to explore form consistency, space complexity, and material brutalism of architecture.
Fabrication - 3D Printing
Basic skeleton of the building was the layer superposition control line of the inverted catenary, and by adjusting each layer's footing point position, each layer's height and each layer's direction (inverted or upright), the shape of the skeleton was determined. The form of the building is inspired by the design intention and methodology of the prosthetic.
The necessary control lines, such as symmetrical, adjacent, cross-level, continuous lines, were selected as the final skeleton of the form. Used different operations, such as loft, intersect, and Boolean operations to generate different arched surfaces. Therefore, this was a process from logic to form, and also a discussion of space.
Skeleton
Line
JULIUS HOUSE
From SKETCH to SECTION - A RHYTHMIC ARCH INTUITION'S LEARNING
Dear friends,
Welcome to my house! After you go upstairs, You can take a glimpse of my life from the stripe window. If you can see me, you are very welcome to knock the door. If I’m not here, which means I’m sleeping. Please come here next time.
Julius
Structure Design
Skeleton based on logic lines to suport the dome and
STRUCTURE 2.0
CHINESE STAGE
ACADEMIC, Group Work, 2017 [undergraduate 4th year]
Partner: Xinyu Zhu, Liang Zhao
Supervisor: Mingxing Song /729427970@qq.com
Changsha | Theatre Complex Design
Role Conceptual Design (70%), Analysis(90%), Physical Modeling (30%), Visualization (70%)
This project is a long-span building with Chinese ancient architecture's elements, including upswept eave and viewing mode. In this case, the project not only maintains the local dialogue, but also recalls surrounding mountain and lake in a readable way. How to use structure technique to make the form realizable is another consideration.
The ups and downs roof form is based on the ancient stages wave in China. The picturesque landscape then will be limited to the three levels of the structure, which shapes a new mountain-river
GENIUS LOCI - CHINESE IMAGE
image.
stage eave rigid frame cloud arch {
Duo pitched roof , rampway connected with grassland, and clival floorslab are demonstrated on the gable section. Interial space and diverse activities can also be shown in another visual angle.
The site is adjacent to Houhu Lake and could people get a view of mountain. Roads and the environment surrounding it provide three different perspectives [A-A, B-1/B-2, C-C] of the architecture. Landscape penetration between the roof and structure, gable intersection towards the
A-A Landscape Penetration
HouHu Lake
Rendering is done by Xinyu Zhu.
This rendering is done by Xinyu Zhu.
The main spaces is covered with rigid frame, which is supported by reinfored concrete arches and connect roof system by steel system(steel rafter and steel purline). The section of the structure is like a eave in antient building in China. A grey space under the eave can be generated.
B ESPOKEN Z ENVO F ACTORY
ACADEMIC, Individual Work, 2020 [3rd Semester in Master]
Supervisor: Robert Brandt Trempe Jr (Email: rbt@aarch.dk Tel:+45 8936 0232)
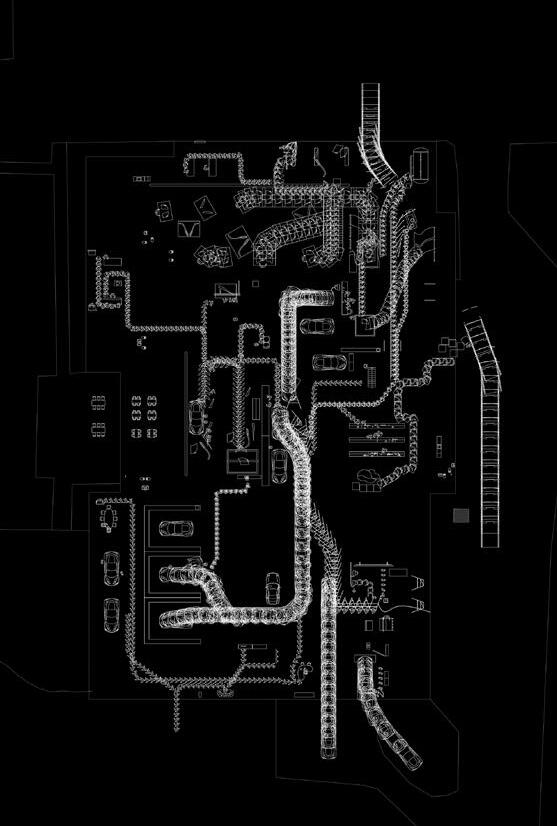
The project is to edit, extend and reconstruct the existing Zenvo supercar factory. Bespoke is the decisive factor within the methodology designed. Through tuning the existing manufacturing process drawing in an aesthetics evolution, the customized supercar factory is generated. Then, multiple line manufacturing correspondent section drawing and one-line manufacturing correspondent section drawings were generated. I think architectural painting has become the tools of analyzing information in this process, by visualizing the information, exploring the most essential features of architecture through the balance of graphic aesthetics, proportions, composition, and elements, and then creating a Bespoke architecture.
As in the exploration of architectural drawing, I tried to abstract the physical motions into abstract static stopping points and dynamic trajectories, by circles and rounded contour patterns respectively. Represent these two elements and fill them with a gradient of black and light. At the same time, architectural drawing, as a new research object takes priority over the information behind it. It is found that the operation of graphics by the subconscious will further strengthen the sense of stagnation and flow. However, looking at this painting again, I found that the radii and chamfers of the pipes for people and cars are different, destroying drawing's aesthetic. Therefore, by filtering the essence of the painting and extracting the most critical geometric elements, I created the second architectural painting(right) for the purpose of optimizing the sense of flow. You can find that the right one is more harmonious than the middle one, and you can feel the energy transfer within the drawing. It also increases the sense of juxtaposition, forming a new infinitely developing order prototype, which seems to flow unhindered. This is in line with my architectural purpose (to create a smoother Zenvo manufacturing flow).
Movement and stillness are a pair of relative concepts. In some way, stillness can express movement. As for the city's bus system, we feel the bus when it stops at bus stations, and the station (the direction of the road) implies the direction of the car’s movement. Therefore, I picked a static point (that is, the circular element in top drawing) to place the walls. And by fabricating curved shapes, different curvatures suggest the direction of movement. Expressing movement by statics is a kind of logic and ideological liberation. The pressed surface has a dynamic trend as if the movement of the object drives the flow of surrounding molecules, energy, force, and fields. The flowing sense is expressed by the overlapping of the diagram and the multiple-line section drawing. The static sense is expressed in the vertical section of each solid in the vertical section drawing. However, it also shows the whole manufacturing process of one car.
AGGRIGATION/ VOLUX - ROBOTICS PLASTIC 3D PRINT
ACADEMIC, Group Work [2018]
MSD-Robotics and Autonomous System Summer workshop
Partner: Toto Tan, Riddharth Jain
Rhizomatic Drawing & CNC Milling
ACADEMIC, Individual work
Rhizomatic Mapping Workshop,2020
Supervisor: Robert Brandt Trempe Jr (Email: rbt@aarch.dk Tel:+45 8936 0232)
|Rhizomatic System| A Rhizomatic Drawing from Reading
A periodical migration of lemmings is an typical example of how the balance of nature is maintained within an animal population. The normal periods. Small migration in searching food and shelter. Once a suitable area is found, the lemmings settled down and do two things necessary for survival. The first is eating. Lemmings subsists on the roots and shoots of plants. The second thing lemmings do is reproduce. The second thing lemmings do is reproduce.
As more and more individuals are born, food and water supply begin to diminish. Every three to four years, some populations in localities go to great density. In response to this overcrowding, lemmings exist a very specialized behaviour, Individual begins to migrate away from the centre of the dense population. They group together and move in detectible ways across the countryside. If a stream or river interrupts their path, they swim across. Many die during migration, starvation
The same way was also used for the mapping of Hamberg Habour. A series of the parametric drawing represent the human, vehicle, and water streamline respectively. All the drawings are generated by grasshopper. All the drawings were overlapped together to show the density and interaction of three aspects. The density and the intersection would be perceived by the integration drawing. Then, all the lines in the drawing were separated into numerable dots. They symbolized each movement of the nozzle for CNC milling. The white model has been shown above.
The way occupants perceive homes depends on the people's bevavior in their homes. Each behavior has an impact on a person's physiological and mental state, which affects the subsequent life. Therefore, we designed an AI system to gradually generate a most reasonable demand, behavior, and service matching result to gradually generate a most reasonable demand, behavior, and service matching result through data collection and deep learning on these figures. First, the system collects the physical personal information and the external factors in our society at the same time. And then it records the people's needs and behaviors in this statement, comparing and evaluating the state before and after. Finally the inductor senses the signals sent by the body or quota's change to provide the most appropriate service.
Robotics Depth Scan Drawing on 3D plastic Surface
ACADEMIC, Group Work [2018]
MSD-Robotics and Autonomous System- Advanced Programming
Partner: Claudia, Yang Meng
We use the intel RealSense camera to capture a point cloud of a 3D object, adapt a toolpath to its surface, and have the robot follow the toolpath with a pen tool. We map a 3d lattice structure drawing onto a thermoformed concave and convex PETG surface. We could also map the same drawing onto two different sized geometries, remapping the pattern at a different scale. We leverage the creative freedom of the human users to adjust the height of the pen, to get shallow or deep drawing result on a complicated surface.
ROBOTICS - HUMAN INTERACTIVE PICK AND PLACE
ACADEMIC, Group Work [2018]
MSD-Robotics and Autonomous System - Advanced Programming
Partner: Claudia, Yang Meng
In this robotics test, we use an Intel RealSense camera attached to a gripper and effector in order to scan and pick up objects not previously known to the robot. We did two different experiments, one is using RealSense detect the existing spheres and put them on to the dropping area one by one. The other experiment is a Hunan-Robot interactive system. Robot will scan the scanning space every time after human make any changes of the placements, and then did another action based on the new object 3D point cloud.
Arduino Sensor Interactive System
ACADEMIC, Group Work
Supervisor: Jeffrey Anderson (jsanderson.1512@gmail.com)
This work explores control, feedback, energy and force in relation to interactions of matter, space and perceived activity (human or non-human), and the embedment of Internet of Things (IOT) technologies to drive additional design agencies.
OpenCV Coding Image Processing
ACADEMIC, Individual Work
Course: Machine Learning & Algorithmic Design
Supervisor: Patrick Danahy, pdanahy@design.upenn.edu
This project aimed to process 10 series of images by different algorithms on a open source platform - GoogleColab(/ OpenCV). 10 different algorithms includes: Threshold, Gaussian blurring, Gradient, Dilation, Canny Edge Detection, Hough line Transform, Hough Circle Transform, Watershed Segmentation Process, Interactive Fourier Transform, Perspective Transformation.