Portfolio from 2017 to 2024
MSD-Robotic and Autonomous System
UPenn, United States
MA-Computational Building Development
Aarhus School of Architecture, Denmark
BArch-Architecture Design
Hunan University, China
SIZHE WANG
EMAIL: sizhe8@upenn.edu & qinghuan586@gmail.com
TEL:+1 (803) 412 0202
LOC: 2080 Ebinport Rd, Rock Hill, South Carolina United States
EDUCATION
LNK: linkedin.com/in/sizhe-wang-art-architect
ISSUU:https://issuu.com/wangsz/docs/sizhe_wang_portfolio_2017-2023
INS: instagram.com/sizhe_drawing/
University of Pennsylvania , Stuart Weitzman School of Design, USA
M.S.D in Robotics and Autonomous Systems
08 / 2023 - 05/2024
• Proficiency in 3D modeling and programming within leading software packages (e.g., Rhino3D/Grasshopper/Python/MAYA/Zbrush/), encompassing geometry rationalization/analysis, and automation.
• Expertise in robotic fabrication techniques, algorithmic design(Machine Learning, Programming/AI), and the programming (OpenCV/of robotic motion (RobotStudio)
• Understanding of cyber-physical systems, including the design and assembly of electronic circuits with sensors/actuators and microcontrollers.
• Conducting high-level scientific research and writing, with an emphasis on literature review, technical writing
Arikitecskolen Aarhus, Aarhus, DK
M.A in Computational Building Development and Transformation (RIBA Part2)
• Computational Design: Parametric Design
• Computational Fabrication: Robotics Hot-wire-cutting, Aluminum Casting, Plastic molding
Hunan University, CHN (985&211project university)
B.ARCH Architecture Design
09/2019-07/2021
09/2013~07/2018
• Multiple Scale of Design: Urban Design, Residential Area Design, Long-span Architecture, High-Rise Building, Landscape Design, etc.
• Technical: architecture structure, construction detail, architect mechanics, MEP (Mechanical, Electrical, and Plumbing), etc.
ARCH. MEMBERSHIP
Architect MAA
Issued by Danish Association of Architects
WORK EXPERIENCE
Lab Operator Assistant
Advanced Robotics and Innovation Lab, University of Pennsylvania, Philadelphia
07/2021-02/2022
10/2023 ~ present
• Robotics Assistance and Operation: Proficiently supported and operated robotic systems including ABB 4600 Floor Robot Track, ABB IRB 120, Universal Robots UR20, and VPM-60 Power Pug Mill, ensuring optimal performance and efficiency.
• Robot Maintenance and Calibration: restoring backups, calibrating axes, and updating revolution counters to maintain high precision
• Technical Documentation: Played a key role in revising the ABB 4600 Robot Arm Service Manual.
• Lab Management: Oversaw daily laboratory operations including organizing, documentation, inventory management
Junior Architect & Media Specialist
CAA architects, Beijing
11/2022 ~ 6/2023
• Metaverse Design and Media Publication: media publicated the pioneering metaverse projects, including the Meta-City-Hall for Baidu China's metaverse, Sphinx Metaverse Festival and Decentraland. Designed for Voxel Valentine Competition.
• Research and Development: Conducted extensive research on 3D printing technologies and contributed to the development of the firm's laboratory
• Conceptual Development: Developed and refined the academic and architectural core concepts and design philosophy for all of projects of the founder's firm
• Digital and Academic Publishing: Authored and edited Wikipedia and Baidu Baike entries for both the founder and the architectural firm, significantly enhancing their online presence and academic visibility.
Junior Architect
ZAO/standardarchitecture, Beijing
10/2021~9/2022
• Served as the core coordinator for the Yuanyang Avant-garde Bookstore project, conducting preliminary terrain surveys, completing planning reports, and communicating with LDI on MEP (Mechanical, Electrical, and Plumbing) and ventilation structures. Drafted drawings at the Schematic Design (SD), Design Development (DD), and Construction Document (CD) phases.
• Acted as the lead architect for the Camerich Living Area's laundry room interior design, focusing on customized furniture and coordination with MEP services. Produced drawings for the SD, DD, and CD phases.
• Played a key role in the Yuanyang Village renovation project, involving area planning, sewage and drainage systems, residential modifications, landscape design, and street planning.
• Contributed to Camerich furniture design, including the design of lounge chairs and dining chairs.
Intern Architect
Architectural Design and Research Institute of Tsinghua University, Beijing
10/2017~01/2018
• Participated in comprehensive construction drawing phases, including floor plans, elevations, sections, detailed stair drawings, doors and windows schedules, etc.
• Involved in the construction drawing of three different types and scales of projects: high-rise building facade renovation, low-rise commercial street construction, university auditorium renovation.
• Collaborated with MEP (Mechanical, Electrical, and Plumbing) and structural engineers across different specialized fields to complete designs, demonstrating strong communication skills.
Intern Architect
Changsha Yiwei Design Cosulting Co., Ltd (FAR.O), Changsha
06/2016~07/2016
Participated in the design and rendering of private residences, including the drawing of conceptual floor plans and bird's-eye views.
AWARDS
2nd Prize, The last Genocide Memorial Competition | Buildner Bee Breeder (out how many Honored Mention Young Visionary Architecture Competition | Standout Archi
2nd Prize Annual Scholarship in HNU
Merit student(3/100), School of Architecture in HNU
Exellent work Shortlist Student's Works Exhibition for Exchange Programs of Achitecture of China
2nd Prize, Dongjingyu Village Regeneration International Landscape Design Competition CBC (China Building Center) & UED magazine
ACADEMIC EXPERIENCE
"Collective form in China" Workshop
AA School of Architecture & Huazhong University of Science and Technology
• Cooperated with Sam Jacoby(Prof.), Jingru Cheng (Ph.D.) in AA [Team Leader]
• Animated collage/ Framework of Social Space
"Sino-Japanese Rural Activation" Workshop
Waseda University & Kunming University of Science and Technology
• Cooperated with NGO and local villagers[Team Leader]
• Self-organization activation; Village renovation strategy "Super Informal" Mapping WorkshopRMIT University & Hunan University
• Cooperated with Jason. Ho (Ph.D.)
• Participatory observation / Mind mapping / Curation "Cave-House Making" Countryside WorkshopTsinghua University & HNU
• Cooperated with Qiang Chang (Prof.)
• Cave construction analysis / Handbook for cave renovation Huayuan Hand-Painted World's Camp
SOCIAL EXPERIENCE
International Volunteer | Bali Children Home and Education Centre
• Taught English to the orphan
SKILLS
Programming Python, Machine Learning, Visual Studio, Open CV, Google Colab, Arduino IDE, Anaconda 3, RobotStudio
3D & Visual
Revit, Rhino, MAYA, Zbrush, Grasshopper, Vray, Keyshot, Enscape, CAD, Adobe (PS, ID, AI, AE, PR)
Robotics Arm 6 Axes ABB 4600 Floor Robot, ABB 4600 Track Robot, ABB I-120, UR 20
Fab-Machine
Drawing
Hot-Wire-Cutting, CNC Milling, Clay Printing, Plastic Printing, 3D Printer, Powder Printer, CNC Milling Maching, Laser Cutter, Knife Cutter, Router Cutter, Cold Vacuum Forming machine, Hot Vacuum Forming Machine, Power Wedger Pug Mill.
Light-color ink, Pestal, Water Color, Sketch, Marker Pen Painting
S I Z H E W A N G AN ARCHITECT with COMPUTATIONAL KNOWLEDGE, ARCHITECTURAL ACADEMIC AND WORKING EXPERIENCE
07/2017 07/2017 06/2017 12/2016 03/2022 10/2021 08/2017 03/2017 11/2016 08/2016 12/2015 07/2017
ARCHITECTURE & URBAN DESIGN
AUTONOMOUS VILLA
Jarlshof Caretaker's House, 2019
PLEATED ICE-HOUSE
Wood detection and structure,2023
CHINESE STAGE
Theatre Complex, Large Span Design, 2017
COHESION SELF
Reconstruction of Warehouse, 2018
Creative Market-Urban Village
Reconstruction of Warehouse, 2017
COMPUTATIONAL RESEARCH
MEGA POLYHEDRON
robotics clay printing,2023
ARDUINO INTERACTIVE SYSTEM
Cyberphysical System,2023
GOOGLECOLAB PROCESSING
Machine Learning,2023
AGGREGATE/VOLUX
Form Algorithm, Robotics Plastic Printing,2023
RHIZOMATIC MAPPING
Form Algorithm, CNC, 2020
ALL-IN-ONE
Cyberphysical System, 2018
This portfolio showcases the synergy of computational design, robotics, and hightech in architecture, highlighting a journey where technology reshapes traditional architectural paradigms. Computational design, with its algorithmic prowess, brings forth a new era of precision and innovation, allowing for the creation of complex and sustainable structures that meld aesthetics with functionality.
Robotics emerges as a pivotal force, translating digital models into physical realities, showcasing how automated processes and robotic arms are not just tools but integral components that realize intricate and once-unfeasible designs. This integration exemplifies a shift towards efficient and precise construction methodologies.
High-tech advancements further propel this architectural evolution, integrating artificial intelligence, virtual reality, and smart materials to produce buildings that are not only structures but living entities capable of adaptation and learning. These technologies catalyze a new architectural ethos, where the built environment is responsive, sustainable, and intimately connected to human experience.
This collection is a narrative of how computational design, robotics, and hightech are not merely adjuncts but foundational elements that drive the future of architecture, creating spaces that are not only functional but experientially rich and forward-thinking.
ARCHITECTURAL DRAWING
INFINITE RELATIVITY PARK
WALL-DOOR-WINDOW EXHIBITION HALL
HUMAN LIBRARY
WORKING SAMPLE
AVANT-GARDE BOOKSTORE
ZAO/standardarchitecture,2023
Fabrication - 3D Printing {A-1}
A UTONOMOUS V ILLA
ACADEMIC, Individual Work, 2020 [1st Semester in Master]
Supervisor: Claudia Carbone (Email:cc@aarch.dk Tel:0045 8936 0305)
Site: Jalshof, Shetland Island, England | Caretaker's House
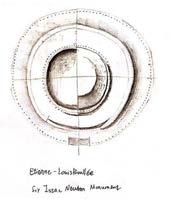
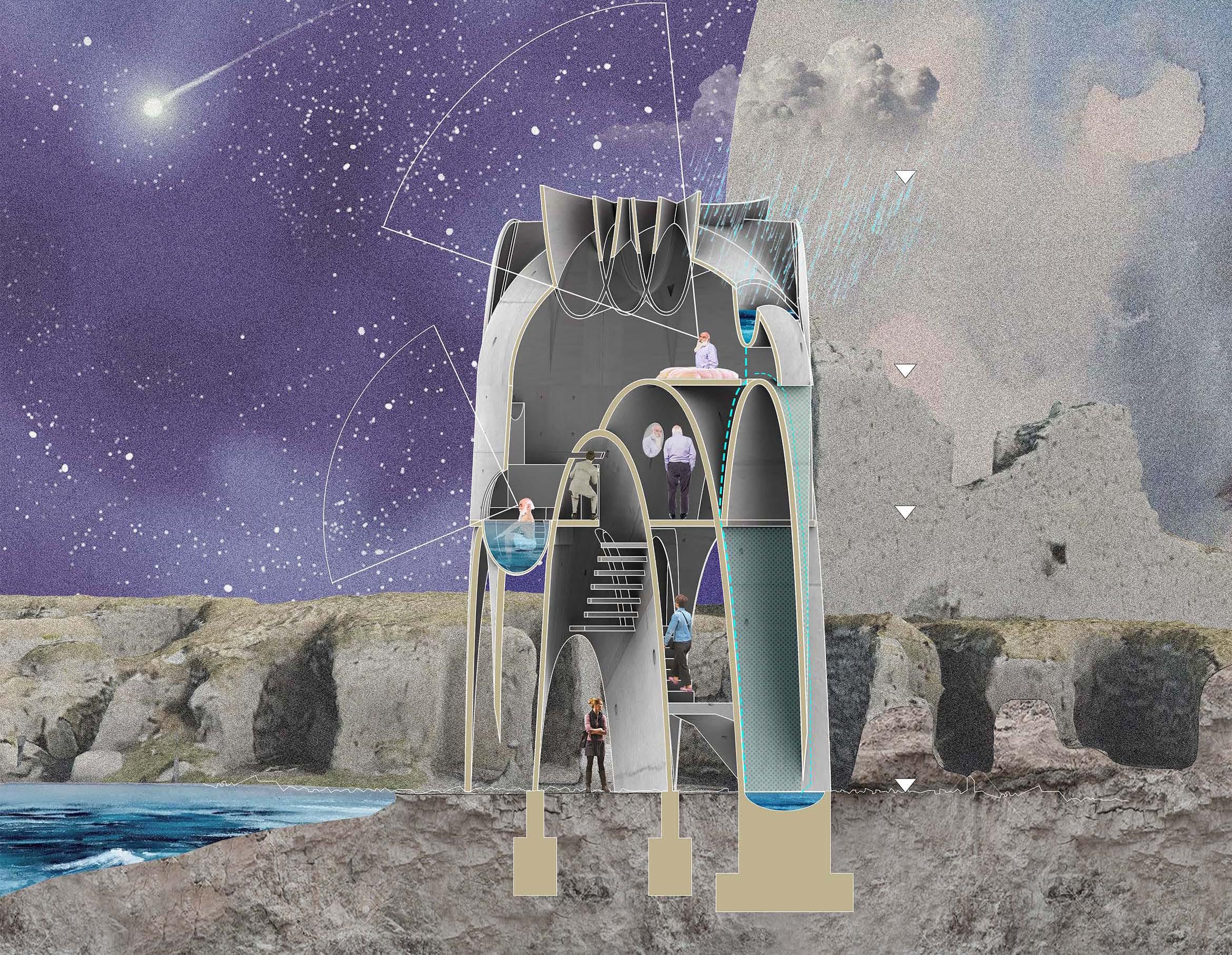
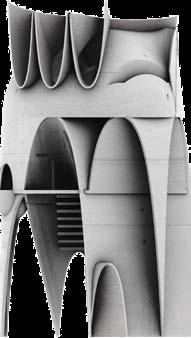
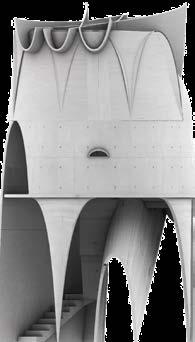
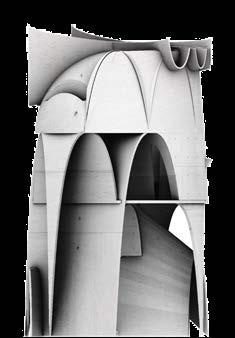
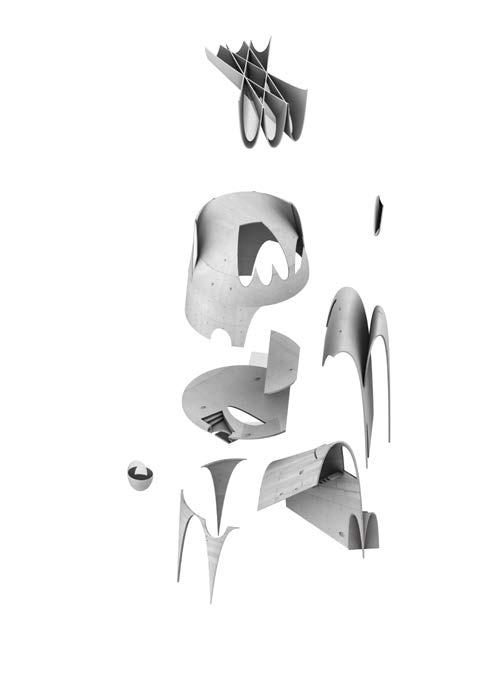
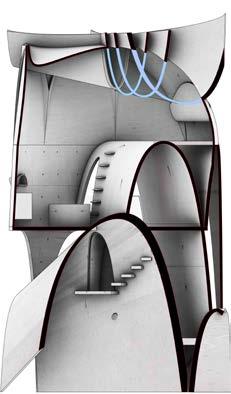
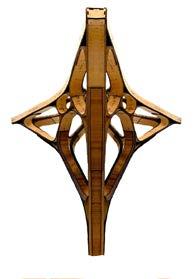
In the ruins on Shetland island, a caretaker house was required to be designed. The caretaker was derived from a science fiction Neurosorcer. I captured the beauty of nature and integrated them into this villa, to heal the loneliness and melancholy of the client. An autonomous villa was comprised of a series of well-organized arch spaces, which was generated by a series of geometric evolution, in order to explore form consistency, space complexity, and material brutalism of architecture.

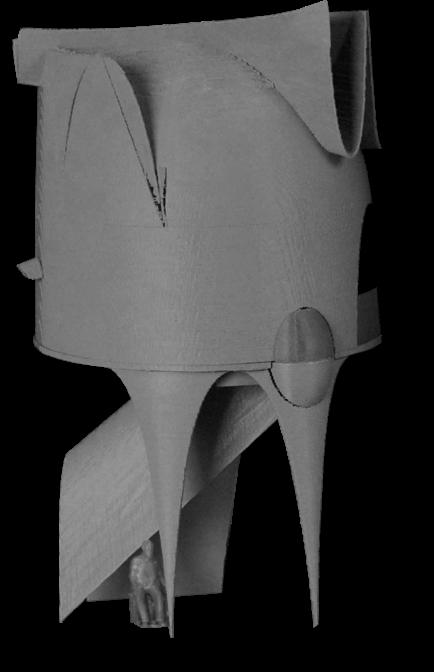
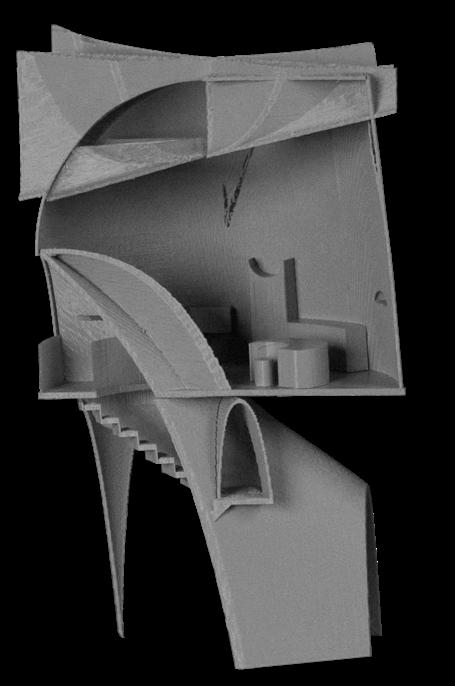
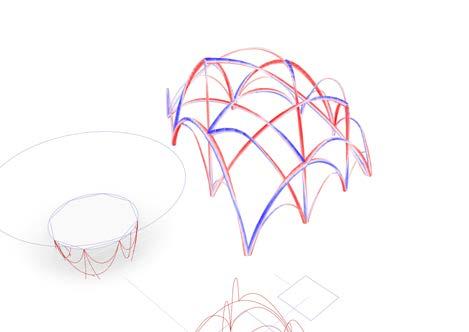
Basic skeleton of the building was the layer superposition control line of the inverted catenary, and by adjusting each layer's footing point position, each layer's height and each layer's direction (inverted or upright), the shape of the skeleton was determined. The form of the building is inspired by the design intention and methodology of the prosthetic.
The necessary control lines, such as symmetrical, adjacent, cross-level, continuous lines, were selected as the final skeleton of the form. Used different operations, such as loft, intersect, and Boolean operations to generate different arched surfaces. Therefore, this was a process from logic to form, and also a discussion of space.
Skeleton
Line


Logic Filt Control
Create Volume diagonal f+f intersect STAIRCASE ENTRANCE WATER WATER NON LINEAR CURVED boolean SURROUNDING proximate EXIBITION diagonal loft booleandiagonal
From LOGIC to FORM - A SPACE TRACING EXPERIMENT A B C a b c d e f 1 2 3 4 1 Logic lines 2 Select lines 3 Connect 4 Form generation Please Note : Use the diagram a-f in B section to read this explosion axonomatric drawing's annotation. IDENTITY Criminal Eternal life Collectomania Authority Sensitive Loneliness Unhappiness Aggressive Care About Nature Enjoy Life new visitors peeping space invitation wall starry sky sunshine and shadow seascape rain specific furniture & space sleep bathtub work site New Friendship F G Customized Furniture N J First Floor Plan 1:50 Second Floor Plan 1:50 Third Floor Plan 1:50 Roof Plan 1:50 1 3 2 4 5 6 7 8 9 10 11 12 13 1 Entrance 2 Invitation letter wall 3 Staircase 4 Pond 5 Peeping client platform 6 Dressing room 7 Office area 8 Ruin's observation window 9 Kitchen 10 Toilet 11 Bathtub 12 Ladder 13 Bedroom E Invite Visitor Nature Collect Sunshine Starry Sky Sea Rain Site Please Note : Axonometric drawings and plan drawings use the same annotation number. J 1 2 3 4 5 6 7 8 10 11 12 13 Egg bathtub Moon working desk Eye window Curved kitchen 1 2 3 4 5 5 6 1 2 3 4 5 6 Peeping at Space Invitation Letter Wall A A
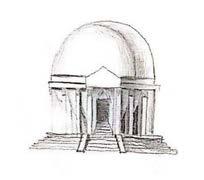
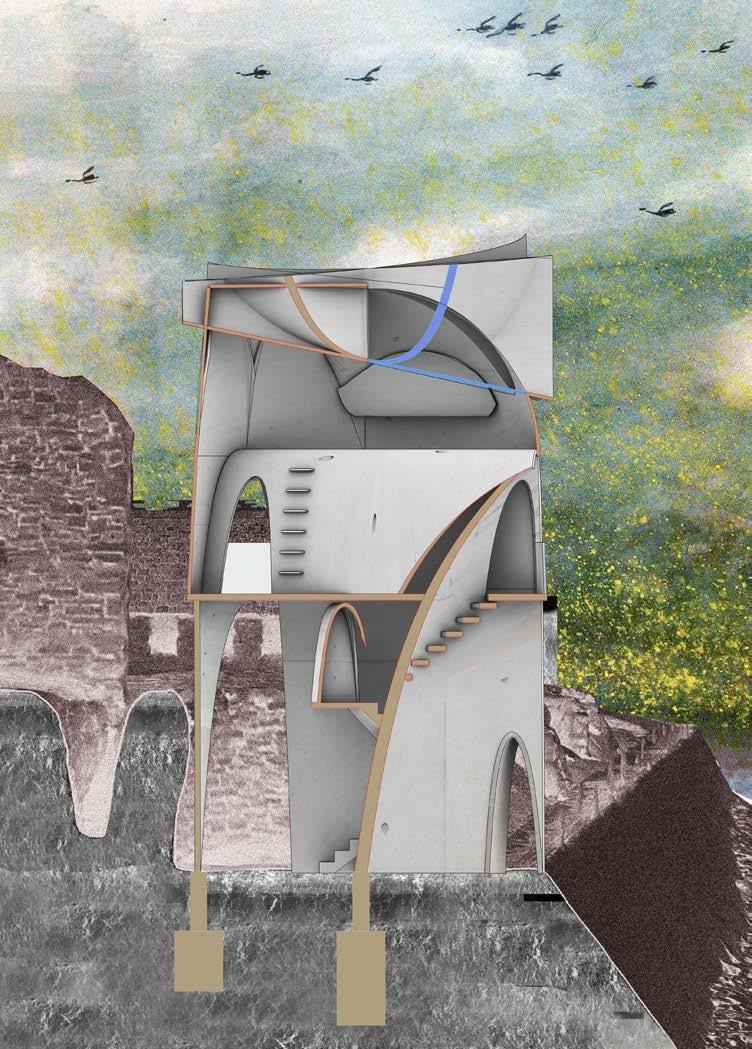
JULIUS HOUSE
From SKETCH to SECTION - A RHYTHMIC ARCH INTUITION'S LEARNING
Dear friends,
Welcome to my house! After you go upstairs, You can take a glimpse of my life from the stripe window. If you can see me, you are very welcome to knock the door. If I’m not here, which means I’m sleeping. Please come here next time.
Julius

rain ±0.000 +4.407 +6.696 +9.837 s u n l i g h s a e s c a p e {Ⅲ}
Structure Design
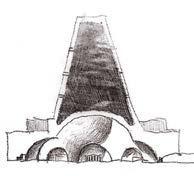
The design of the structure is a difficult negotiation process. In order to balance the purity of the building space, the umbrellashaped pillars were generated according to the logical lines. The concrete walls that fell on three sides were shear walls to maintain the beauty of the space. Therefore, each component of the building play its due role. A brutalist, sculpture-like architecture is born.


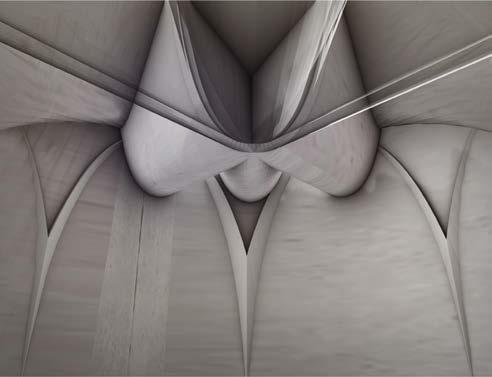
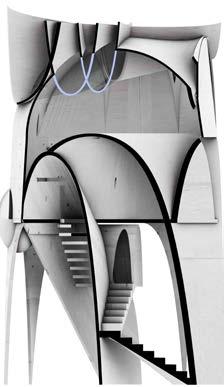
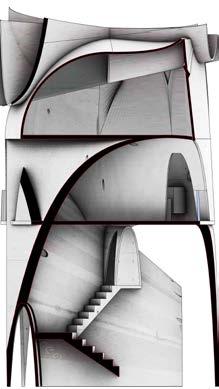
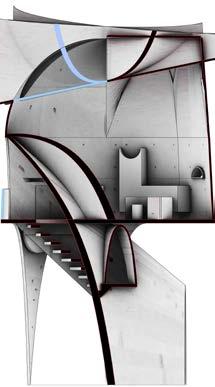
From COMPONENT to STRUCTURE - A TOUGH NEGOTIATION
Logic Line Crossed Shells based on logic lines to suport themselves
Truss Skeleton based on logic lines to suport the dome and roof
Load Shear Wall Special-Shaped Column +4.407 +6.696 +9.837 Spring is coming Section L Brutalist Sections
STRUCTURE 1.0
K
STRUCTURE 2.0

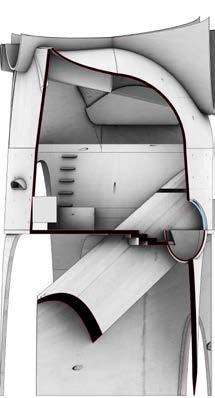
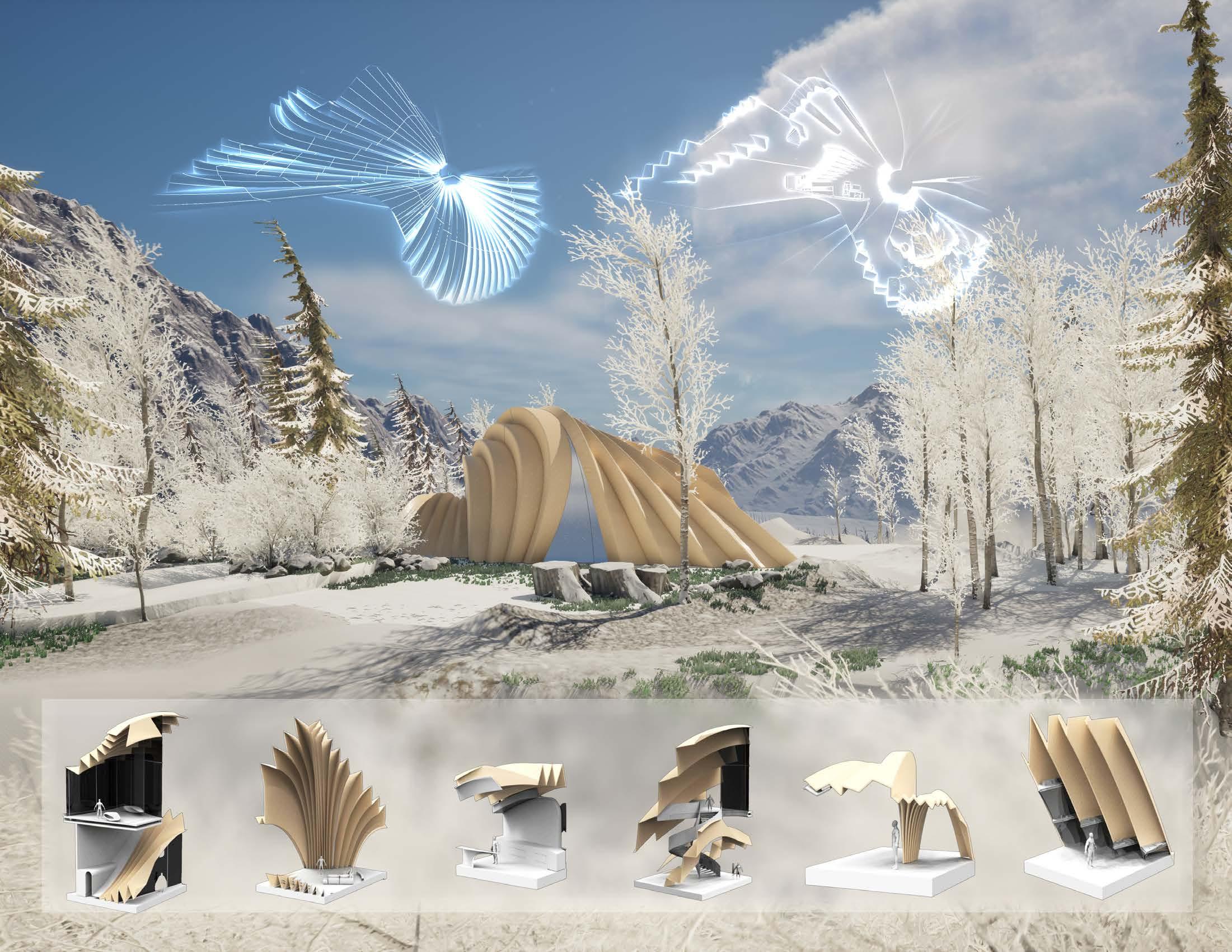
P LEATED I CE- H OUSE
ACADEMIC, Group Work, 2023 [1st Semester in Master]
Supervisor: Alica Nahmad Vazquez (Email:anahm@design.upenn.edu)
Partner: Riddharth Jain, Claudia Campuzano, Ecem Karaduman
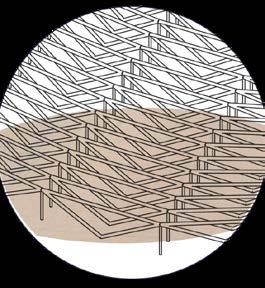
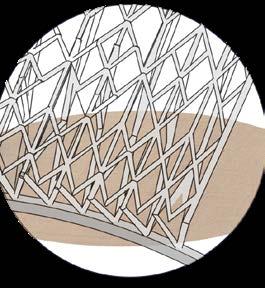
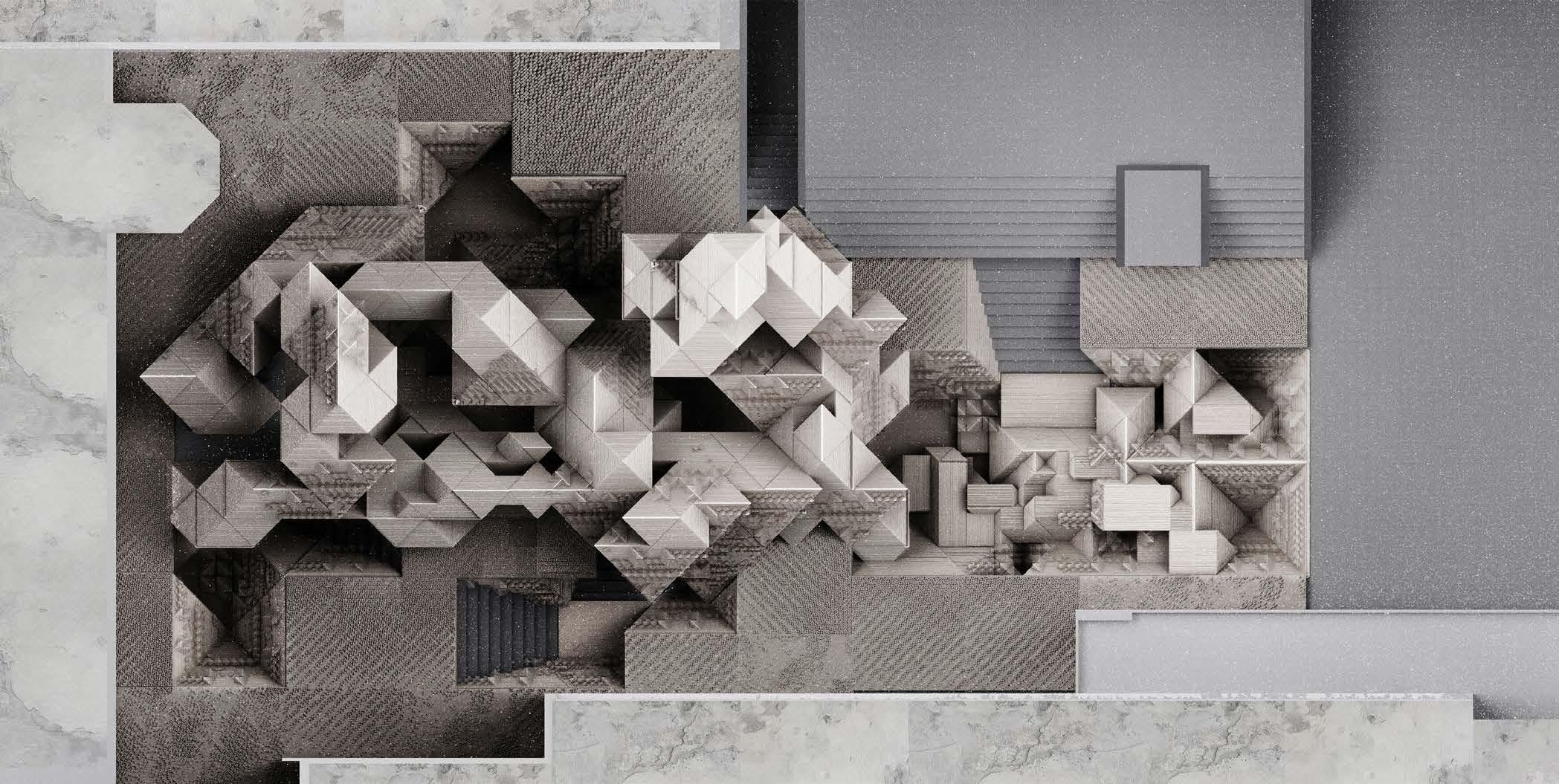
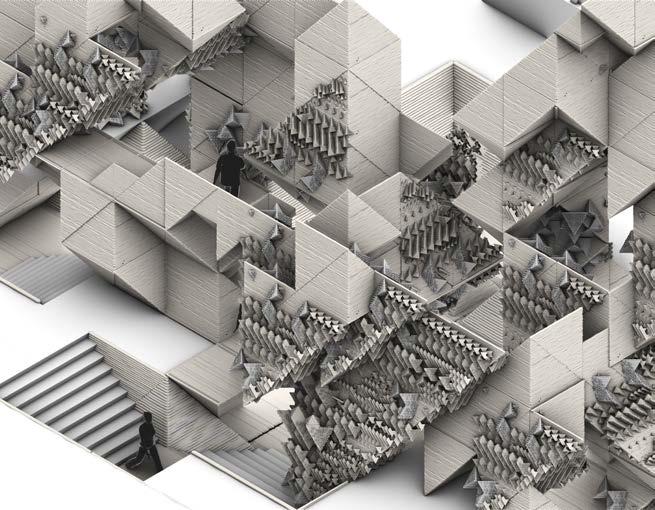
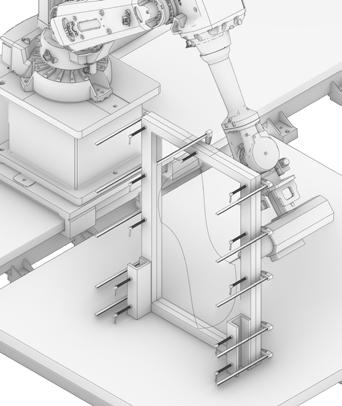
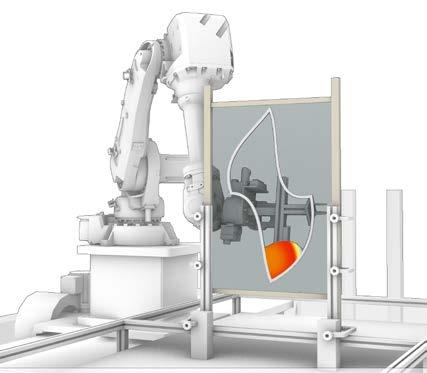
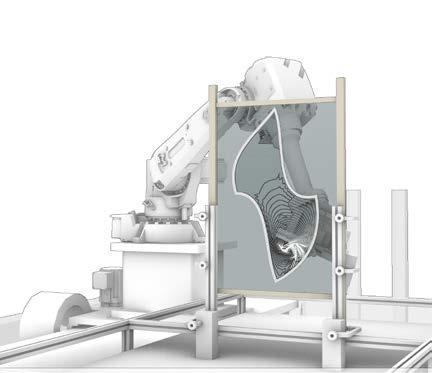
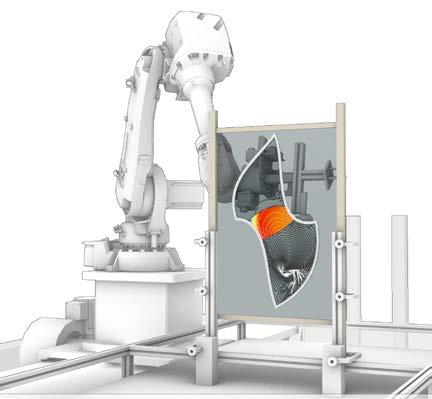
Our design journey focused on seamlessly integrating our fabrication insights into diverse spaces, creatively utilizing pleated structures to shape environments. Instead of confining pleats to roofing, we merged them with the ground, sometimes integrating them into furniture or circulation. This approach generated unique spatial experiences rooted in our fabrication ethos, blending innovation with tradition. Pleat intensity defined privacy, while openness delineated public areas. The interaction between elements like stairs and pleats bridged conventional architecture with our innovative approach. In parallel, Patrick's project harnessed robotic fabrication and machine learning to autonomously identify materials, revolutionizing construction in challenging environments, pushing architectural boundaries.

Render with different lightings
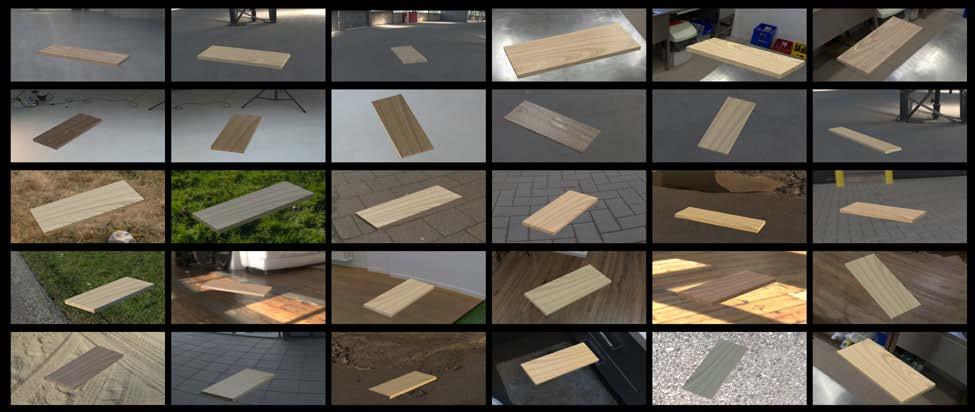
Render with different Environments
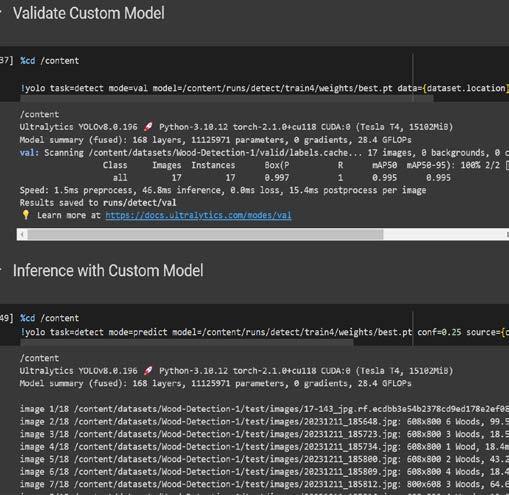
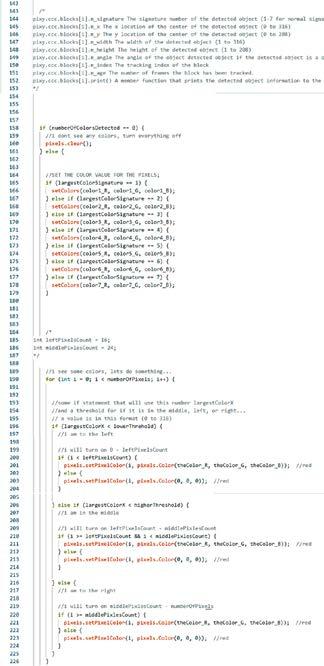
To enable this, generating a machine learning model capable of detecting wood in various environment becomes necessary. The intial step consists of training the model model by inputting a large library of images in various environments and manually indicating the wood in each of the images. However, manually drawing a rectangle around thousands of images can be a very time consuming process. The objective is to streamline this process by leveraging a rendering engine that can generate not only thousands of frames with diverse views, lighting, and backgrounds but also provide the material ID for each image. This approach optimizes the training process, eliminating the need for manual highlighting of wood in every single image. {A-2}
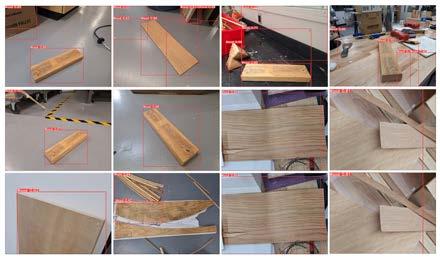
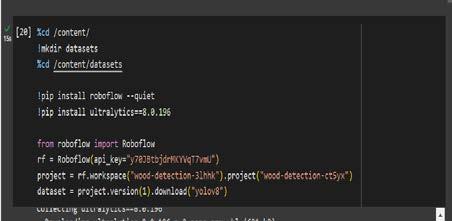
OBJECT DETECTION ON CUSTOM DATASET
YoloV8 & Roboflow
YoloV8 interferance with Custom Model - Custom Training
APPLYING THE SYSTEM IN A TIMBER PLEATED STRUCTURE ICE-HHOUSE
KIT-OF-PART
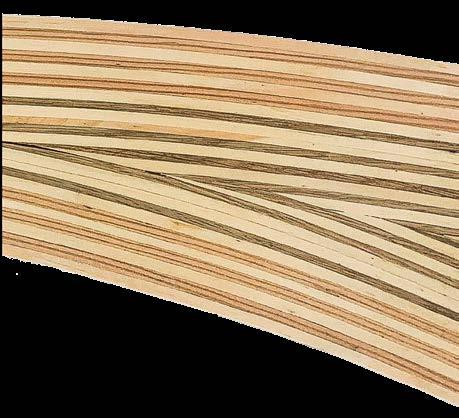
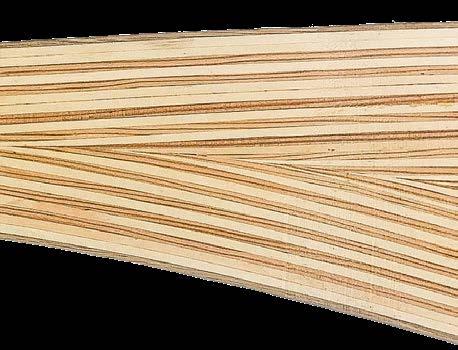


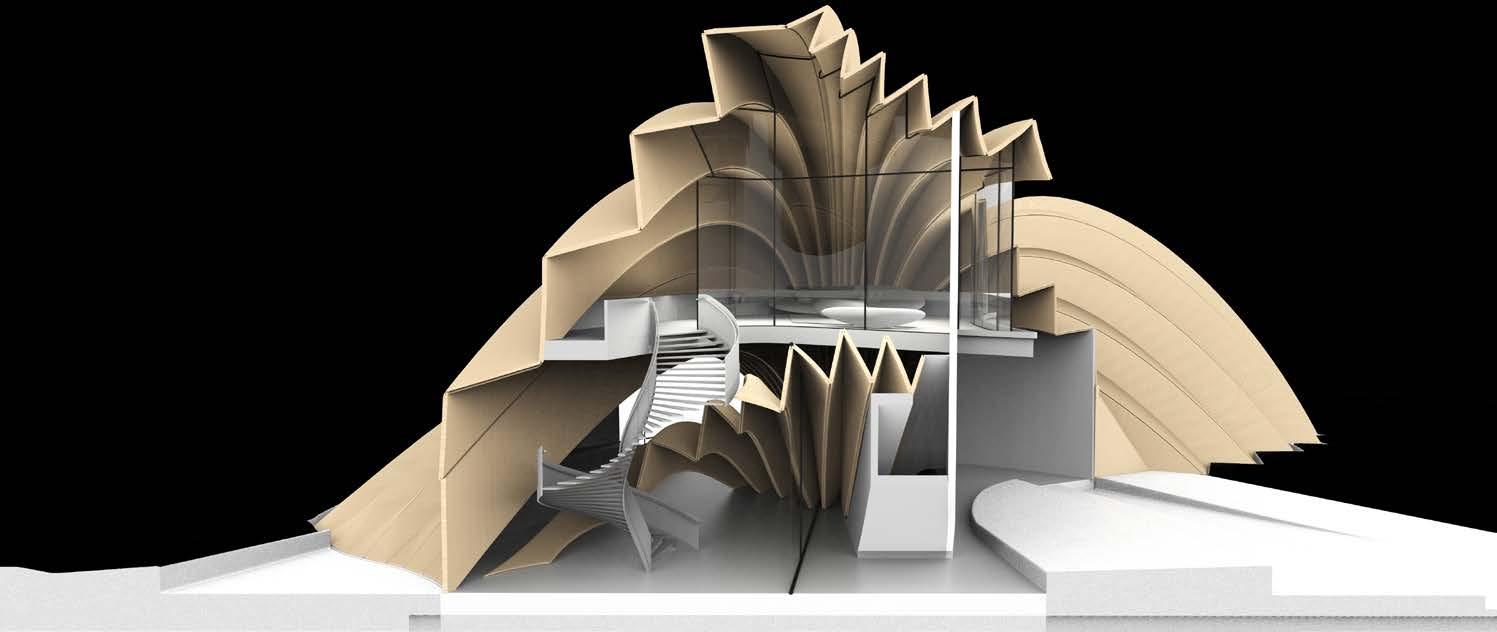

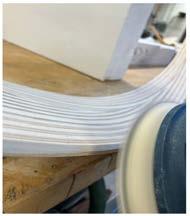
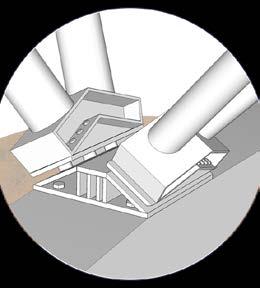
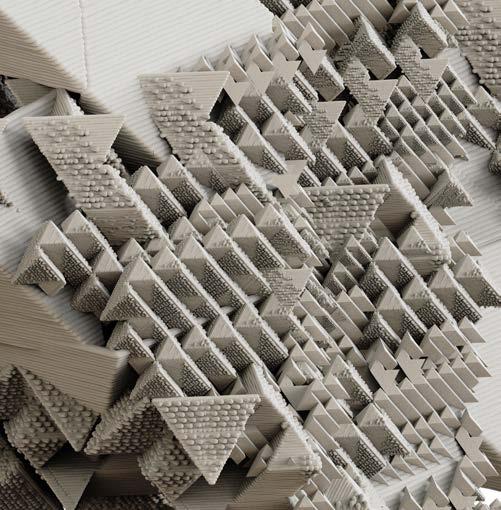
The project's facade employs an innovative laminated bending wood technique. Through experimentation, a combination of softwoods (pine, Douglas fir) and hardwood (oak) was achieved, resulting in a structure that is flexible in the middle and sturdy on both sides. The first bend is realized by placing the woods in a zigzag pattern inside the first wooden mold. After sanding, a second bending is achieved using a robotically controlled hot wire to cut
molds. The final step involves assembling the pieces together.









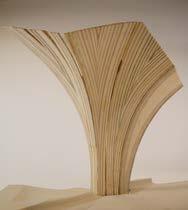
Soft wood-pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Hard wood oak Soft wood pine Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine // Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Soft wood pine Hard wood oak Soft wood-pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Hard wood oak Soft wood pine Soft wood douglas fur Soft wood pine Hard wood oak Soft wood pine Soft wood pine Hard wood oak Soft wood pine Soft wood pine Soft wood pine Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Soft wood pine Soft wood pine Soft wood pine Hard wood oak Soft wood pine Soft wood pine Hard wood oak Soft wood pine Soft wood douglas fur Soft wood pine Hard wood oak Hard wood oak Soft wood pine Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood douglas fur Soft wood pine Soft wood pine Hard wood oak Hard wood oak Hard wood oak Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak---Soft wood - pine---Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Soft wood pine Hard wood oak Hard wood oak Hard wood oak Stacking First Bending Slicing HWC Second Bending Mold Marking profile Second Bending test Second bending by Sanding Assembly MODEL WOOD LAMINATION FACADE & MANUFACTURING PROCESS
foam
SECTION B-B SECTION A-A

Ski Display

Double-storey void
 Living Room
Living Room
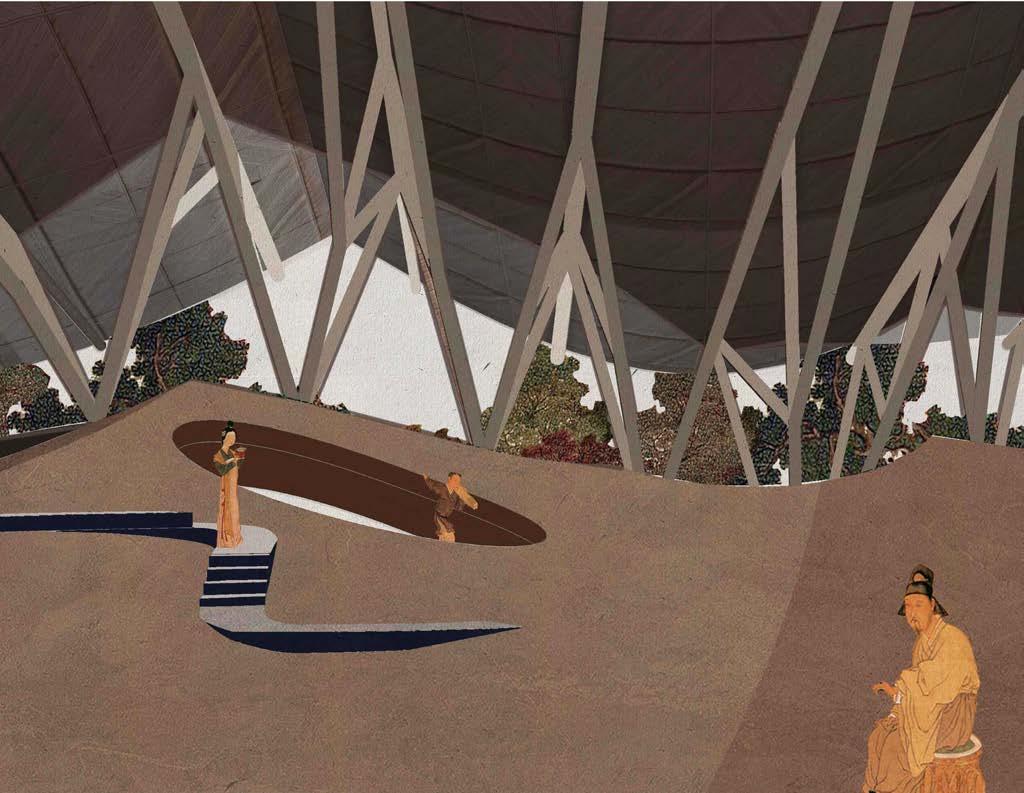
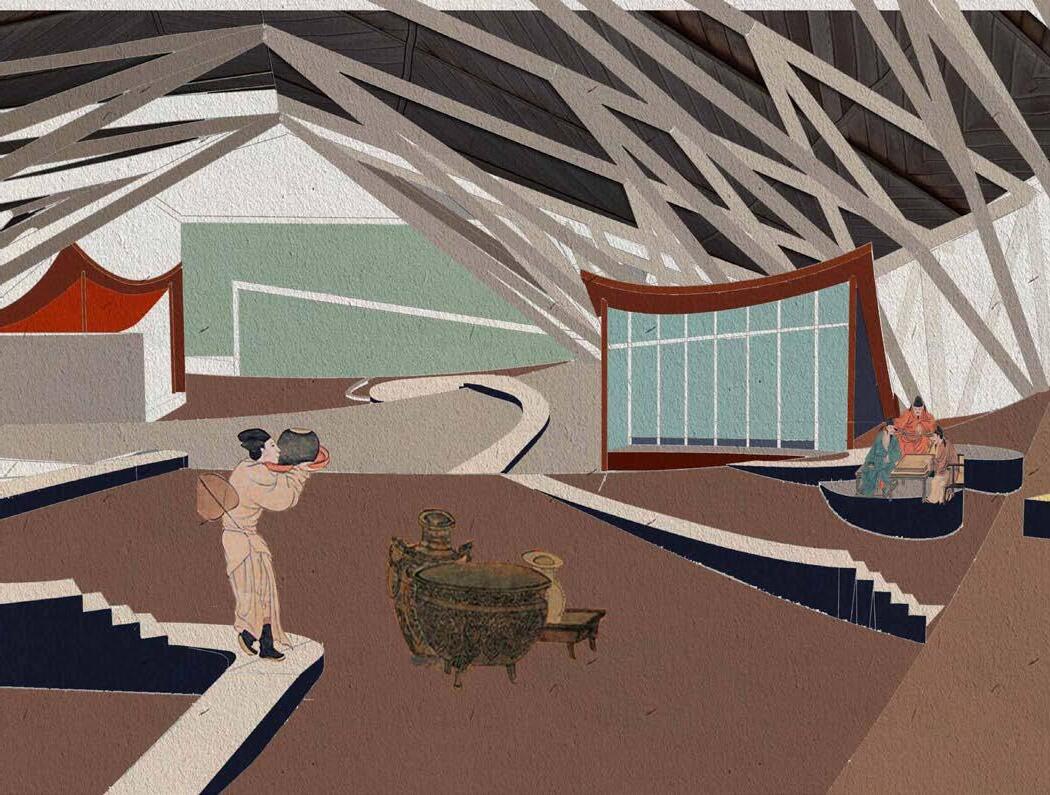
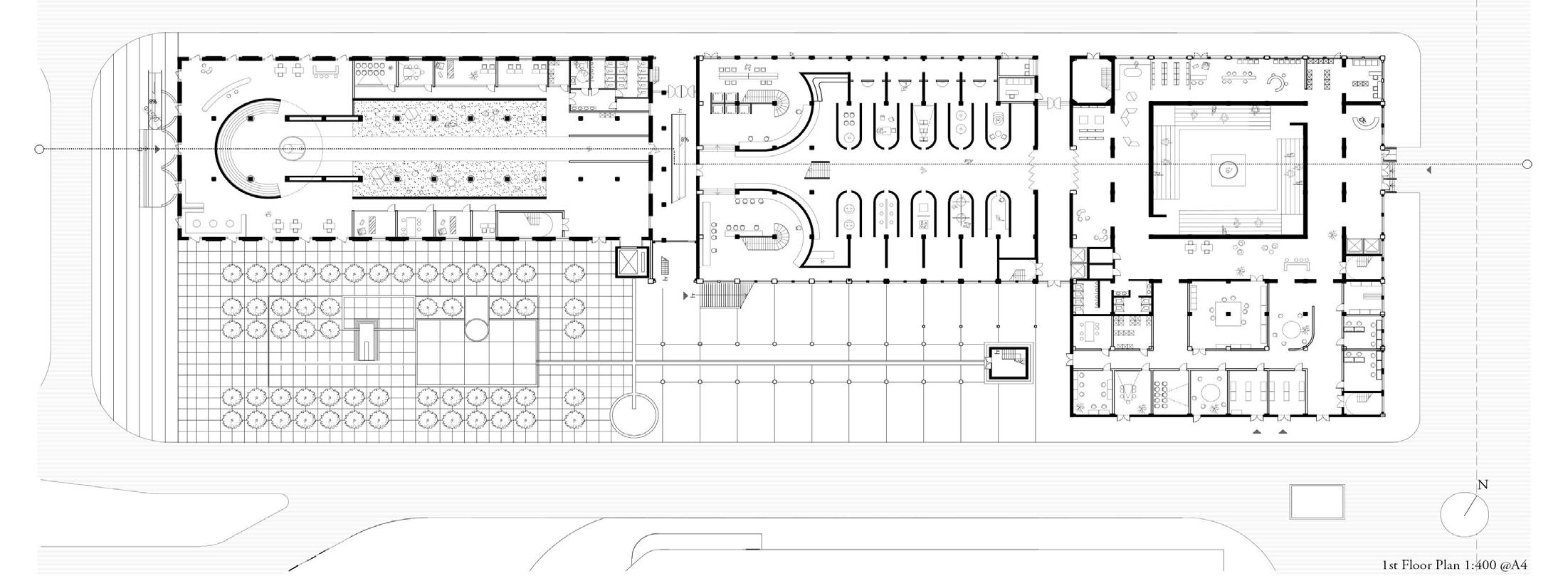
CHINESE STAGE
ACADEMIC, Group Work, 2017 [undergraduate 4th year]
Partner: Xinyu Zhu, Liang Zhao
Supervisor: Mingxing Song /729427970@qq.com
Changsha | Theatre Complex Design
Role Conceptual Design (70%), Analysis(90%), Physical Modeling (30%), Visualization (70%)
This project is a long-span building with Chinese ancient architecture's elements, including upswept eave and viewing mode. In this case, the project not only maintains the local dialogue, but also recalls surrounding mountain and lake in a readable way. How to use structure technique to make the form realizable is another consideration.
Lanscape





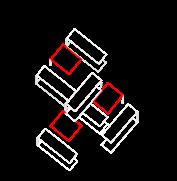
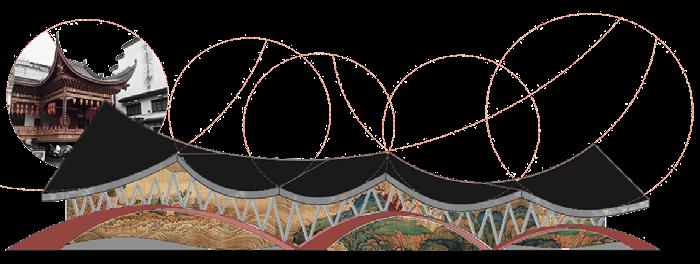
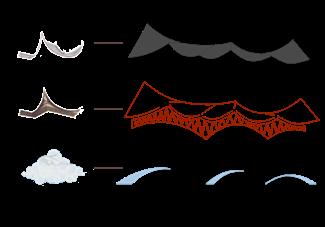
The ups and downs roof form is based on the ancient stages wave in China. The picturesque landscape then will be limited to the three levels of the structure, which shapes a new mountain-river image.


{A-3}
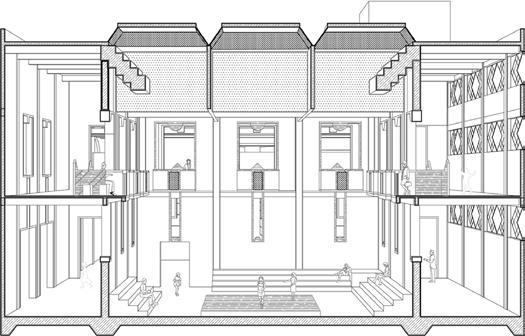
GENIUS LOCI - CHINESE IMAGE
A-A
stage eave rigid frame cloud arch {

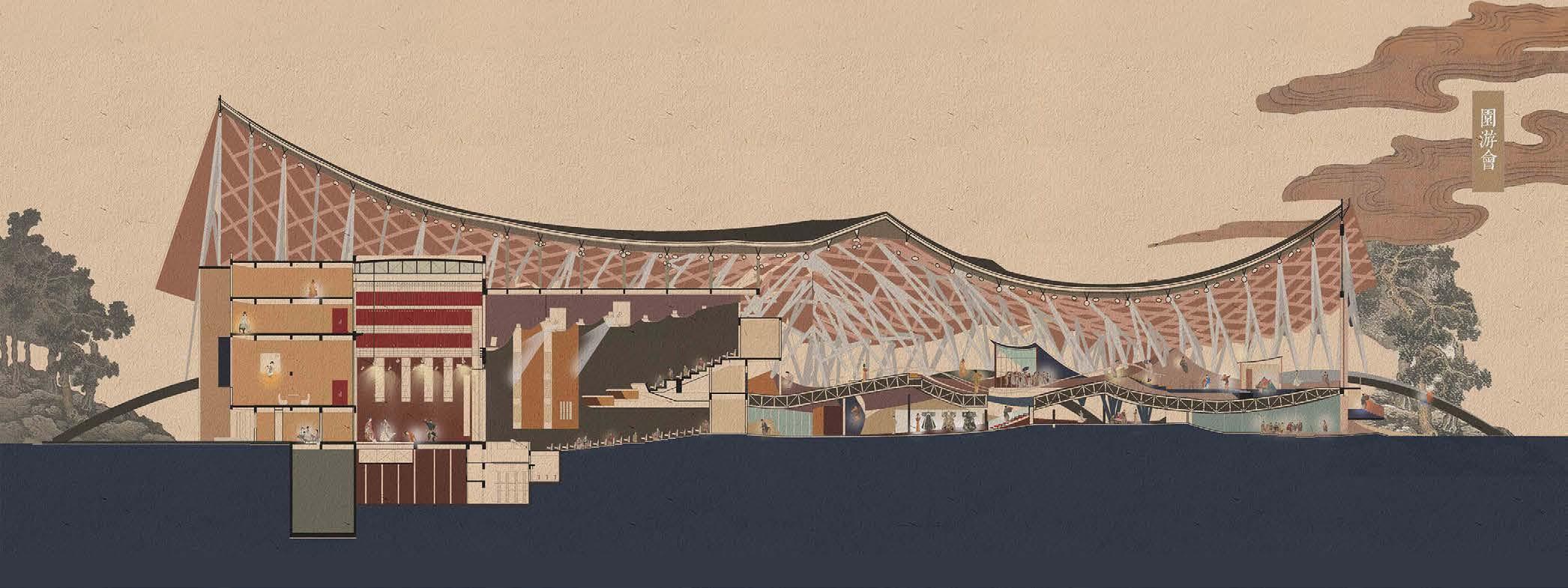
Duo pitched roof , rampway connected with grassland, and clival floorslab are demonstrated on the gable section. Interial space and diverse activities can also be shown in another visual angle.
The site is adjacent to Houhu Lake and could people get a view of mountain. Roads and the environment surrounding it provide three different perspectives [A-A, B-1/B-2, C-C] of the architecture. Landscape penetration between the roof and structure, gable intersection towards the
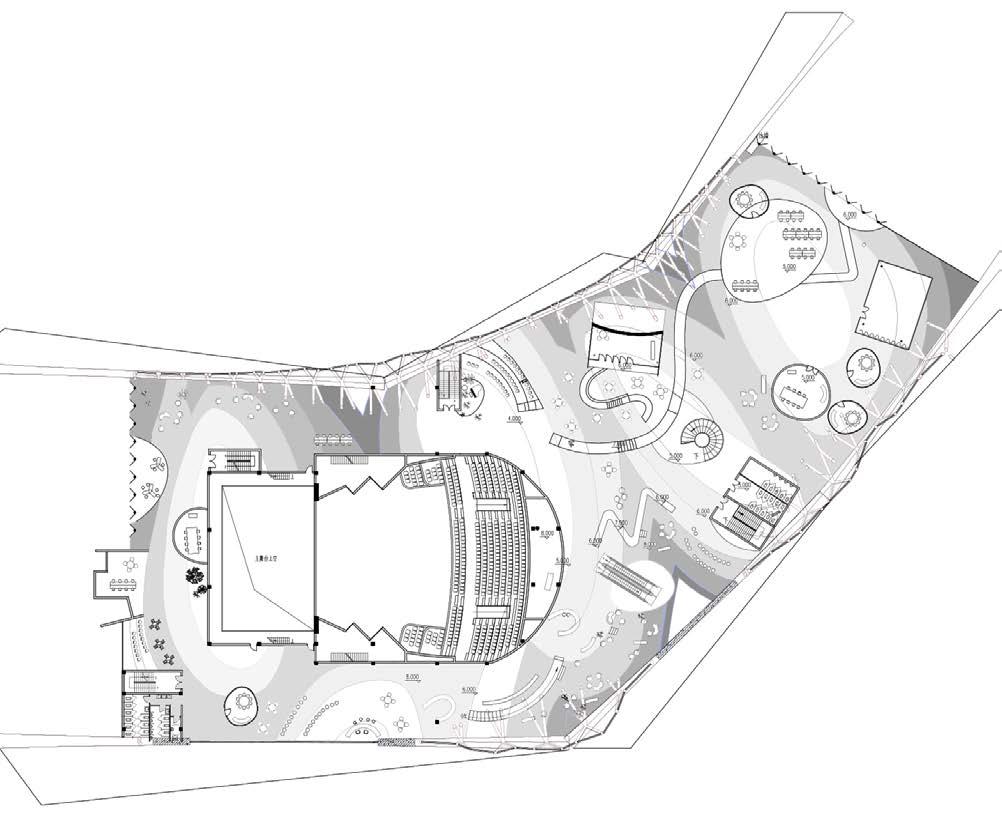

H=9M Plan 1:1000 @A4 1 auditorium 2 1-stage 3 fore stage side 4 working 5 rehearsal room 6 book office 7 tea house 8 coffee 9 concert 10 relaxing 11 reception 12 service 1 5 2 3 3 4 6 11 7 8 9 10 12
A A B-1 B-1 B-2 B-2 C C
B-1
C-C
A-A Landscape Penetration
/B-2 Gable Section
Depth Picture
M a Y u a n R o a d
HouHu Lake
Rendering is done by Xinyu Zhu.
PLAN & PROGRAM B - B Gable
 This rendering is done by Xinyu Zhu.
This rendering is done by Xinyu Zhu.
The main spaces is covered with rigid frame, which is supported by reinfored concrete arches and connect roof system by steel system(steel rafter and steel purline). The section of the structure is like a eave in antient building in China. A grey space under the eave can be generated.
roof bracing component connection component second-level rigid frame (support roof structure) first-level rigid frame (support roof structure) reinforced concrete arch 1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 sheet zinc on 20 mm laminated wood boarding 2 200*500mm natural dark grey double-lapped plain tilling with curved edges 150/100 mm battens/counter battens rear ventilated layer moisture-diffusing membrance 3 steel rafter 4 steel purline 5 composite thermal-insulation system: 15 mm fabric-reinforced rendering 100 mmmineral-wood insulation 300 mm reinforced concrete beam 6 Air ventilation mouth 7 space truss 100mm castable integral floor 8 Rigid frame contacting node 9 200mm downspouts 10 metal Sun visor 11 casement in larch frame (U-value =1.1 W/m2K) 12 5 mm linoleum 65 mm screed two-layer polythene foil 20 mm impact-sound insulation 80 mm expanded-polystyrene insulation 150 mm reinforced concrete floor 18 mm sound-absorbrent plasterground smooth 100 mm C10 concrete subcrust Detail 1:75 @A4 Detail Drawing is done by Liang Zhao and me. Structual Solution: Rigid Frame
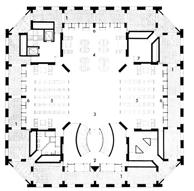
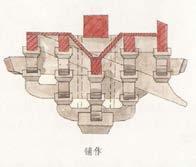
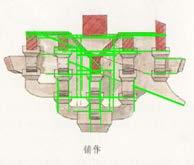
COHESION SELF
ACADEMIC, Individual Work 2018, [Undergraduated Graduation Design, 5th year]
Reconsturction of ShengLi WareHouse
Supervisor: Xie Fei (Email: fei_soarch@hnu.edu.cn Tel:00-86-0731-88822679)
Site: Han Kou, Wu Han, China Experimental Theatre
CulturalAxis EntertainmentAxis

Urban design is for the purpose of activating the historical block German Concession in Hankou. Vertical axis is named Cultural Axis,which tandem several ancient buildings in 19th century. Horizontal axis is the Entertainment Axis. Dock, cellar store, hotel, and subway transfer station(a series of facilities) provide the possibility of prosperity of the block.
The original warehouse was established gradually to satisfy different store needs. So it could be divided into 3 different parts. Explored the cohesion quality of the in-heritage of each part and combined with 3 types of viewing performance. Geometry elements were born in the grid analysis. A new order of wall was added into the original homogenized column-system.
Aesthetic Value Grid Order Geometry Value Assessment Functional Replacement Plan Form Spacial Form Industrial Heritage HanKou Monument Randomicity Immutability column order wall order Homogenize Symmetry
This is a reconstruction program of an industrial heritage in German Concession in HanKou. To protect the aesthetics values maximum and to achieve functional replacement adaptability in a new order of form are both the main considerations of the project.
photo
original warehouse Phrase 1 Phrase 2 Phrase 3 3 Types of Viewing Grid Symmetry Geometry Plan One to One Blend GENIUS LOCI
Permanent Geometry
of
-
0m 120m 250m 500m 1 : 5500 @ 400m
OF GERMAN CONCESSION 150m 0m {A-4} A
MAP







D
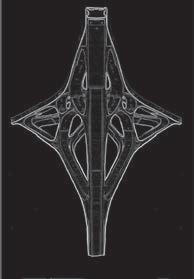
A traditional theatre mode is designed in the first part of the old building. The quantity of the column suggests potential centricity. Square can be uti-lized in its plan organization. 1.skylight on the ceiling 2. create thick sense 3.3m height beam 4.suspended board reflacting 1 2 3 4 5 6 5.Central stage |1st floor Private room |2nd floor 6.Loop gallery 上 Plan 1:300 @A4 F Catwalk theatre mode was designed in the third part of the old building. Long rectangular column grid suggests linear symmetry. Symmetry walls restrict a viewing area, creating flowing space
The 1st Theatre
3.White agate marble 4.Frosted glass 5.Black marble audience actor stream a.waiting area c.buffer area b.performance area d.climax 1 2 3 4 5 Ceiling and column intergrated, to gain 1. Wall organization 2. Skylight Design 3. Materials 1f geometry 2f atrium 3f ceiling Plan 1:500 @A4 warehouse H
The 3rd Theatre
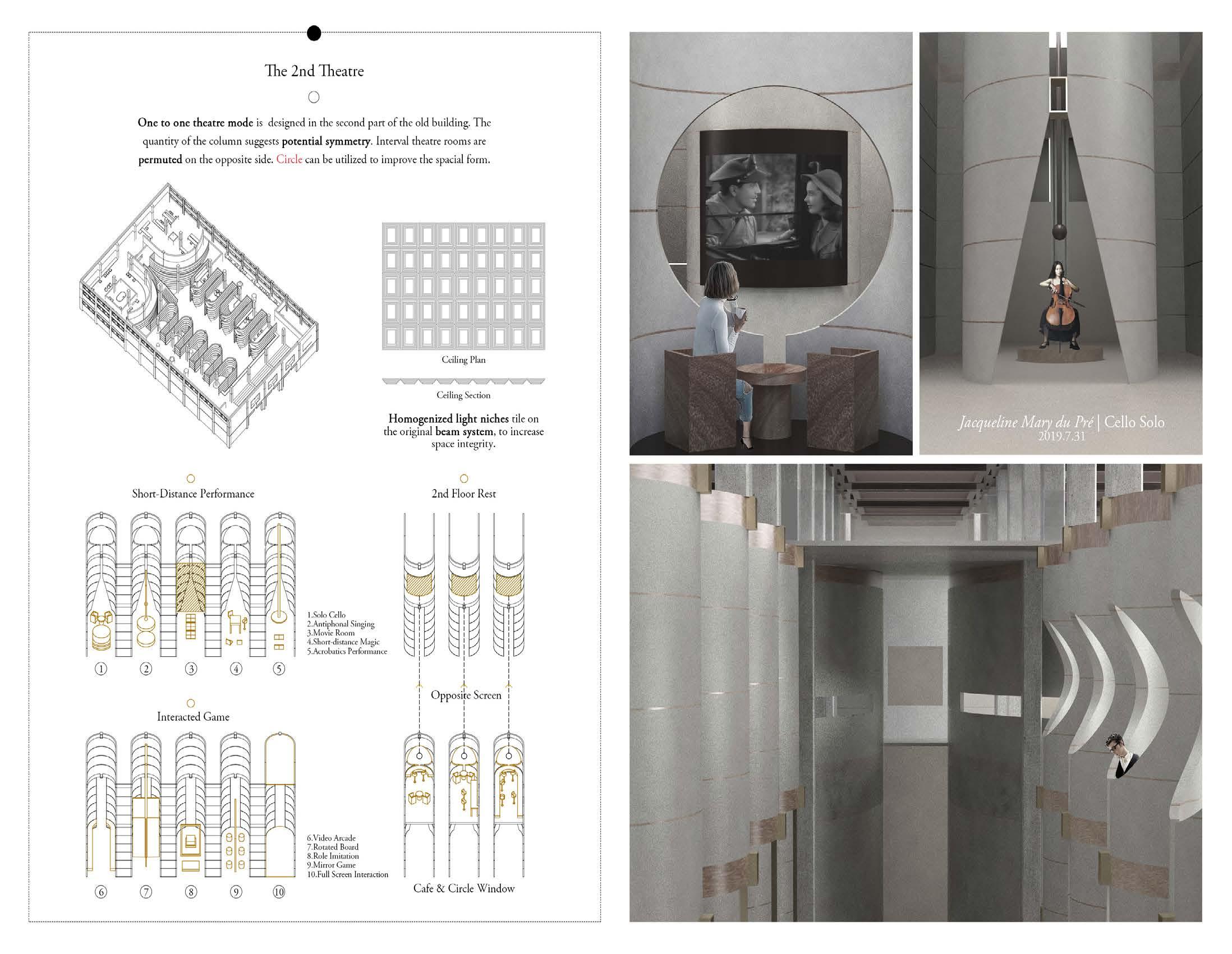
G
-5}
D ANCING with W ATER
ACADEMIC, Individual Work, 2020 [2nd Semester in Master]
Supervisor: Joel Letkemann (Email:jl@aarch.dk Tel:+45 8936 0325)
Site: Hamburg Harbor | Water-cycle sensory spa
"We live not on the summit of a solid earth, but rather at the bottom of an ocean of air.” - Sean Lally
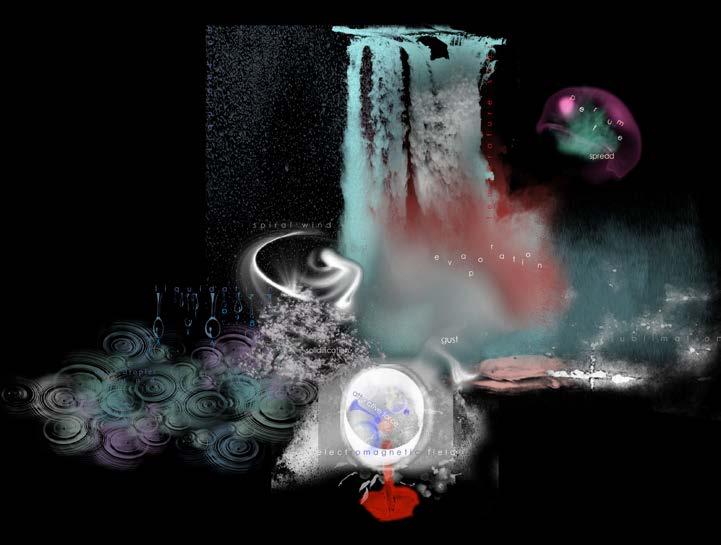
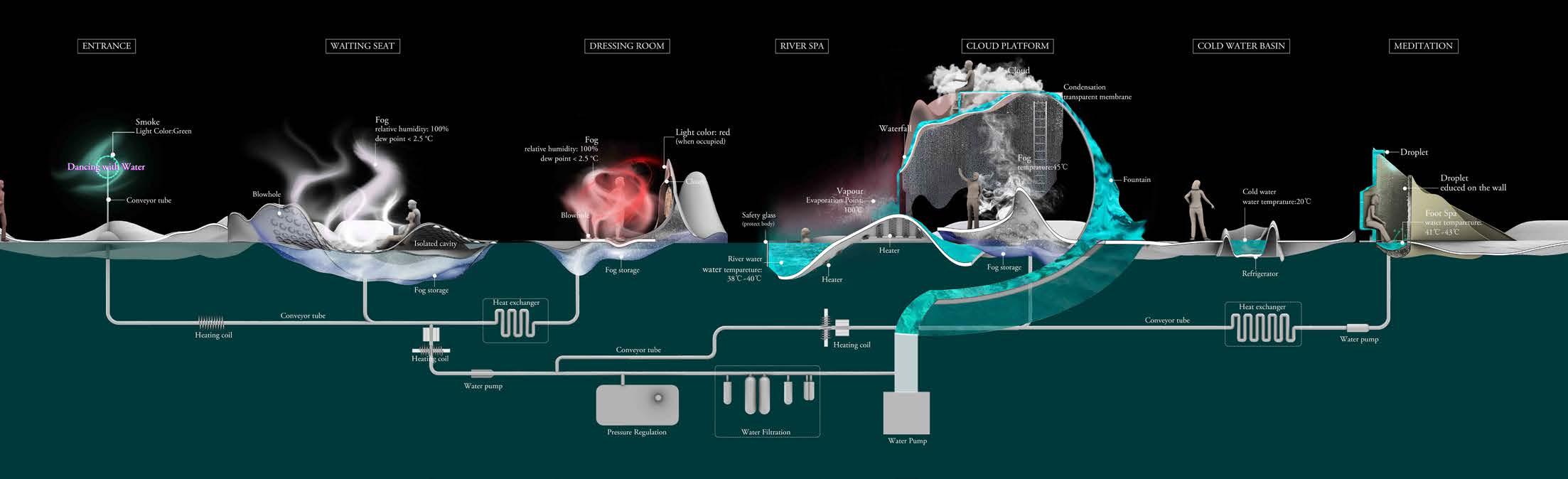
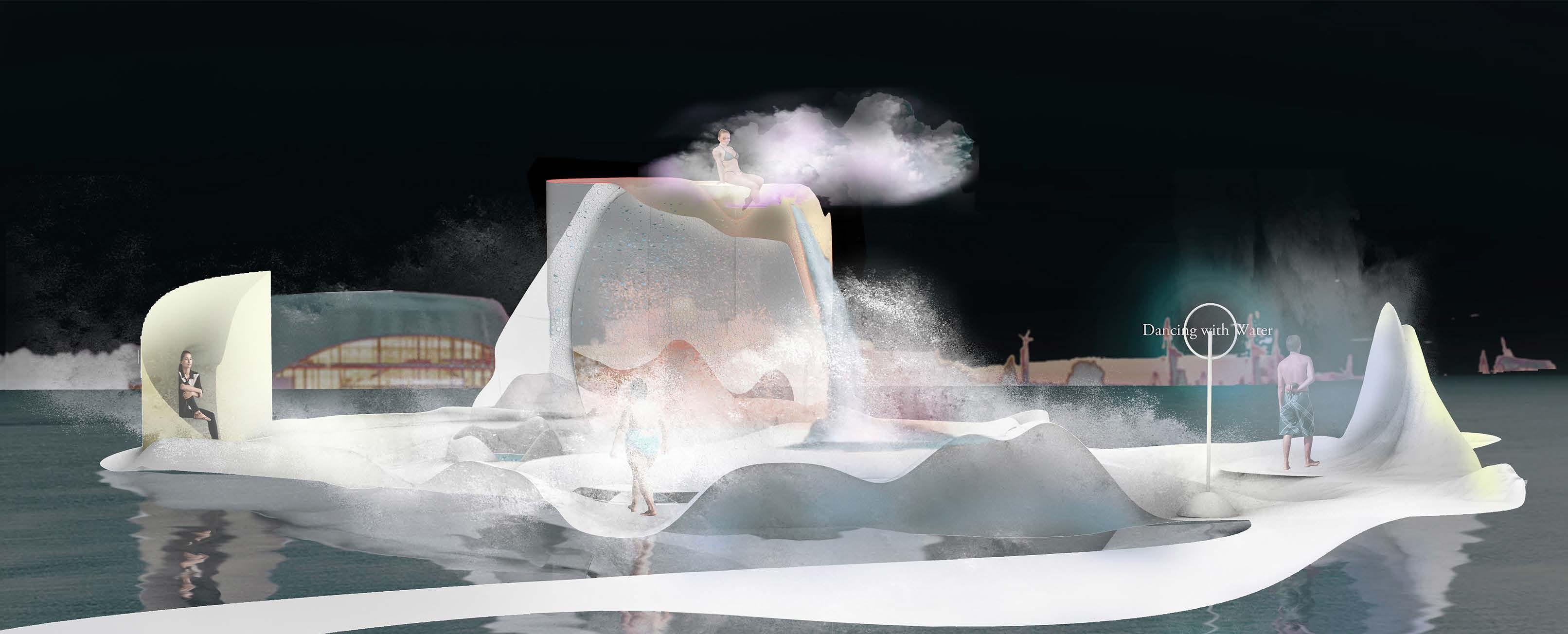
Water of Elbe River is a very important energy in the site. I would like to use Elbe River water as the main energy source to create a meteorological architecture. A series of physical transformation processes between different forms of water are responding to different space. Hence, this project describes how this meteorological architecture play with the water and render what various kinds of picturesque scenes. This fairyland is also a surprise for the seaman who spend a few days on tough sea voyage, and the seaman gains a short-lived but fantastic experience with water in an unconventional way. So, this water-architecture elaborates the correlation between body, water substance and nature element's characteristics. Architecture is not only shaped by geometrical forming and division, architecture is but also an integration of natural element from the nature.

METEOROLOGIC MACHINE multiple water cycle
THE INTENTION OF MACHINE
1.to find the potential merge possibility space which is made by natural element;
2.to record the memory of free and uncontrollable substances;
3.to explore a new feeling on the smell, skin, view which are corresponding to olfaction, tactility, visual sense.
I am dedicated to exploring the aesthetics of painting and brushwork. The brushwork's aesthetics of matierial from nature is explored in this step.
MECHANISM
Substance: Water.>>
Forms: Clouds, frost, dew, fog, glaciers, ice, steam, rain, snow, vapor, droplet >>
Verbs: Liquefy, evaporate, spread, solidify, water attract... >>
Adjective: touchable, soft, fragrant, intangible, scorching, dreamscape, fleeting, ethereal...>>



{A
A Liquid Irregular Bubble Membrane + Perfume Inside WATER COMPOSITION Sublimation + spriral wind [temprature up] Sublimation (Locality) + Breeze Rapid Waterfall + Instant Evaporation [temprature up] Condense + Droplet + Drop down to water Ripple VALENTINEBedroom USERS PROGRAM Stove Water Bar Cafe SPA Sauna Meditation

Meteorological Map in 2049 Hamburg
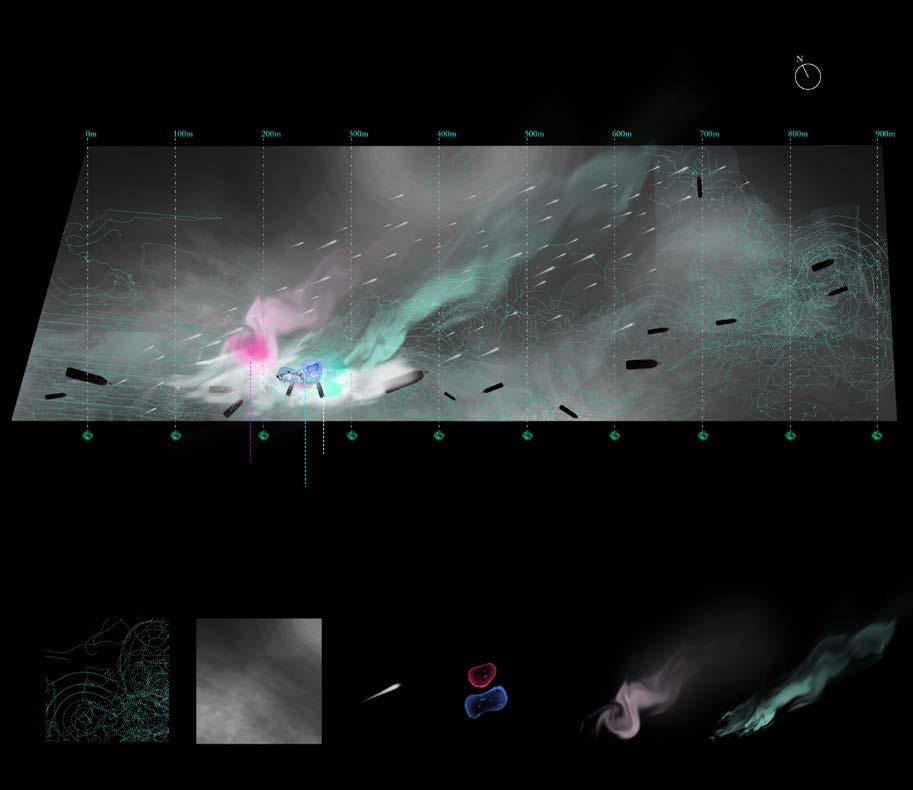
How to read the map?
Meteorological Plan
Wave of Elbe Atmosphere Wind Core Odor Diffusion Vapor Diffusion





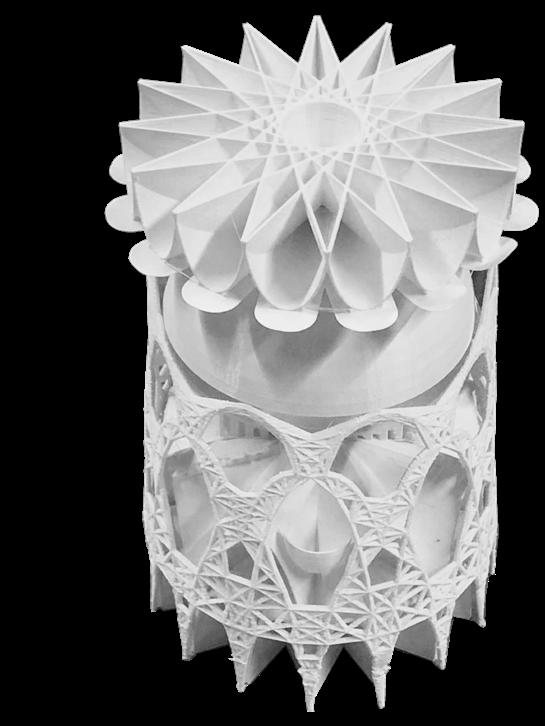
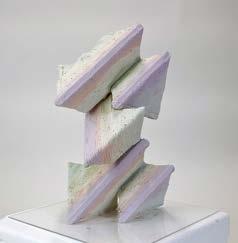
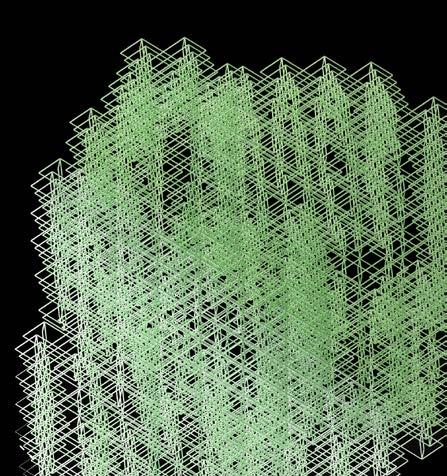
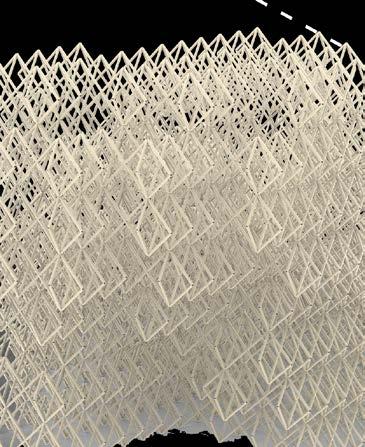
P OLYHEDRON C LAY R OBOTICS P RINTING
ACADEMIC, Group Work, 2023 [1nd Semester in MSD-RAS]
Supervisor: Saunders, Andrew <asaun@design.upenn.edu>
Partner: Shenaia Kaylion Turner, Yang Meng, Riddharth Jain
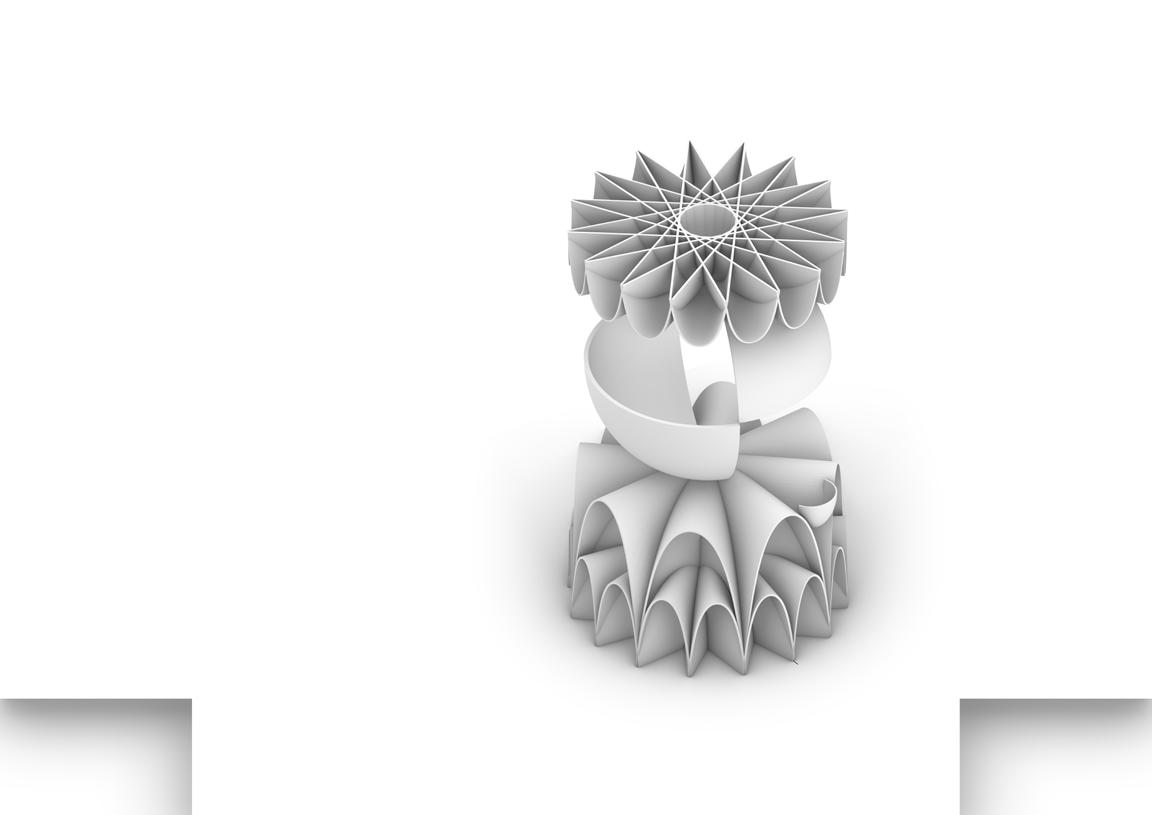
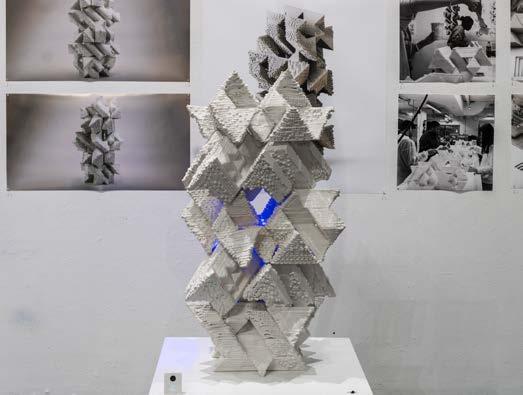
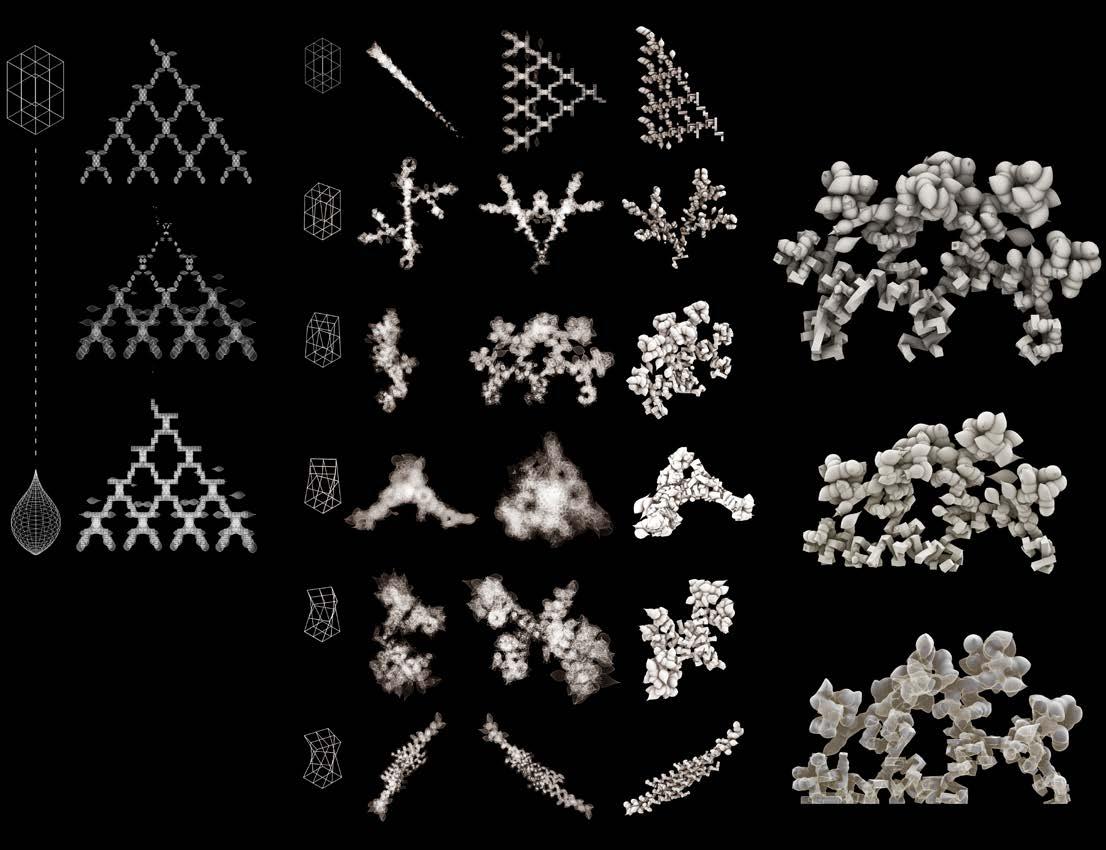
From studying Robinson Fredenthal’s “Black Forest” prototype, we gained a deeper understanding of polyhedra and geometric composition. The unique abstraction and iterative characteristics of geometric elements will form various results through different sequences and organizations. In the practice, 3D printing these polyhedrons with a robotic arm, I learned about the entire process, from filling clay printing to bisque firing, and how to adjust the input data to form different printing effects.



Today, incorporating robotics and autonomous systems nudged us into exploring new angles to the piece, except for just the geometry as an element. Being able to formulate new ideas to enhance or elaborate on the essence of the geometry is made easier by, for example, defamiliarization and using the relief pattern to highlight the spiral in our design.
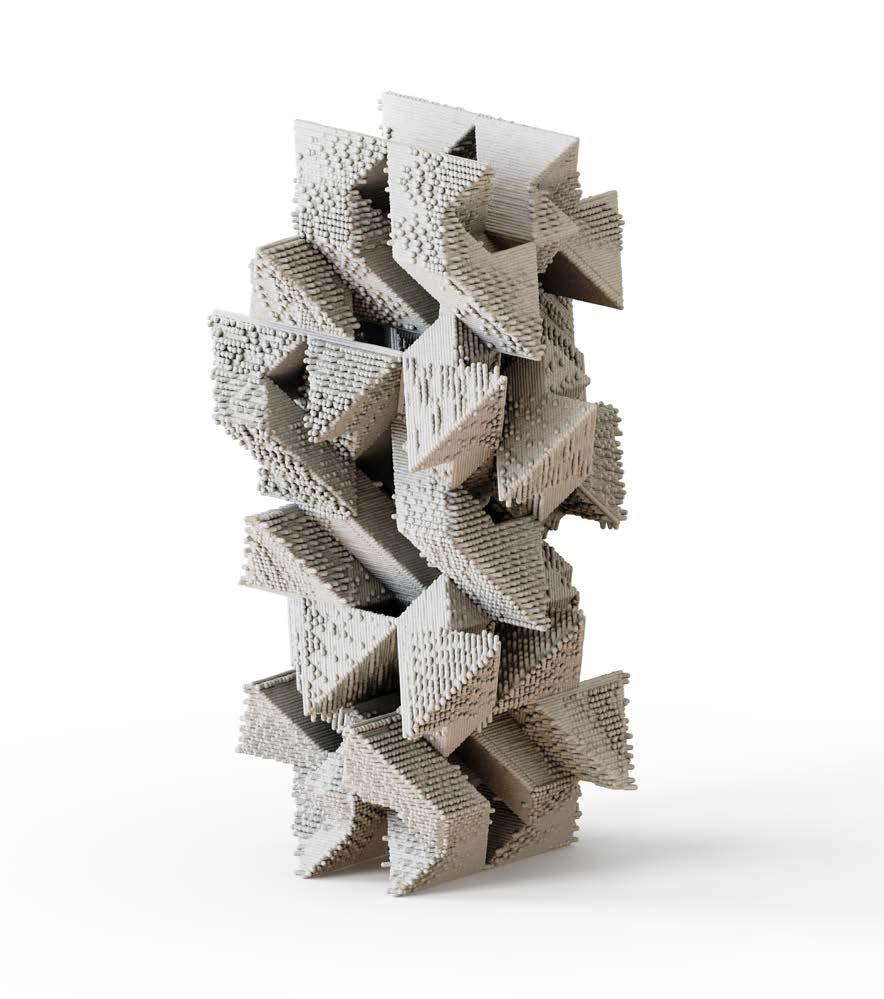
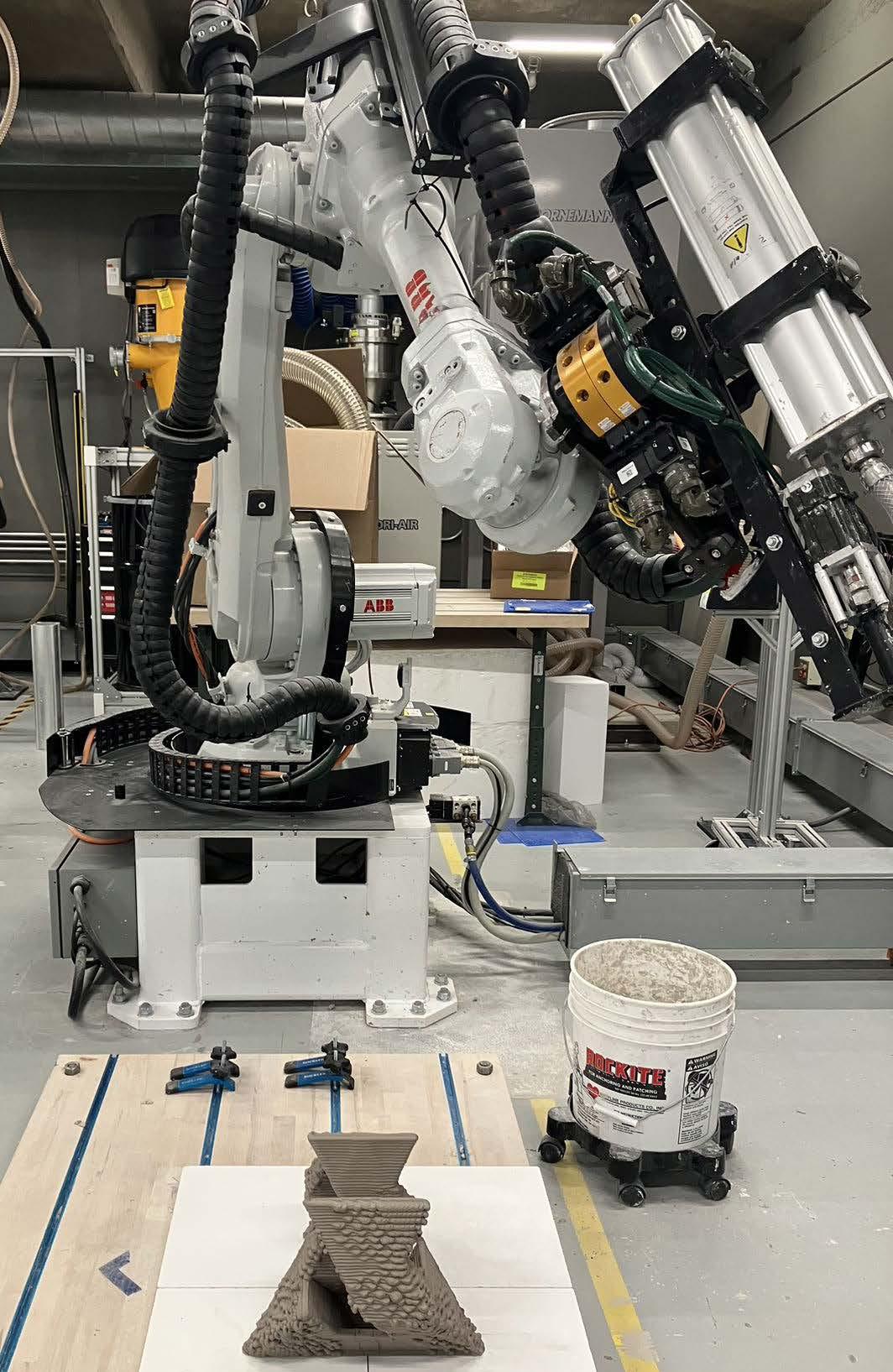
With the use of ABB IRB4600-60 robots with clay end effectors to produce clay bricks, we were able to test, create, and recreate multiple directions for the project.
A complete design was formulated based on the arrangement logic of Fredenthal, which fuses octahedrons and tetrahedrons and then divides the piece into printable, stable, smaller groups of tetrahedrons and octahedrons for clay extrusion.
In about 8 weeks, we understood how the material (clay) acts when extruded from a 6mm nozzle vertically down. The amount of slope required for a stable extrusion, the speed of extrusion, and the moisture content in the clay are all actants for the piece. The physical properties of clay change after drying and more after bisque firing, which were factors to be considered prior to extrusion.
This studio opens the territory to understand the material and use it for the benefit of exploring more using the robot. The geometry in itself is a design guiding factor and imposes a strong influence on the viewer if fused systematically. Robot




Exploded Isometric Plan Exploded Isometric Exploded Isometric Plan Isometric PROTOTYPE ROBOTICS PRINTING ——MEGA-SCULPTURE {B-1}





































PREPROTOTYPE - MICRORELIEF
Fredenthal work was governed by stable tetrahedrons and octahedrons in combination as a space-filling triangulated network. In geometry, a tetrahedron, also known as a triangular pyramid, is a polyhedron composed of four triangular faces, six straight edges, and four vertex corners. The geometry is stable as a geometry, which is given by angles of 60 degrees with all sides of the same size divides the weight in equal proportions via all sides to the base edge. Space-filling is the packing of 3-dimensional bodies in an infinite array such that all the spaces are occupied without the intersection of contiguous cells. The diagram below helps us understand the concept in linear space packing.
Front Elevation Piece Piece JD 12.15.74 Philadelphia, Pennsylvania University Pennsylvania Exploded Isometric Scale: 1mm 1.6 mm Robinson Fredenthal Philadelphia, Pennsylvania Southwest Elevation Elevation Scale: 1mm 2.5 mm JS 09-11-74 4 Robinson Fredenthal Philadelphia, Pennsylvania University Pennsylvania
OF POLYHEDRON COMPOSITIONS
DATABASE
Deconstruct Structure Bone Dry Glazing Microrelief from Generative Artificial Intelligence


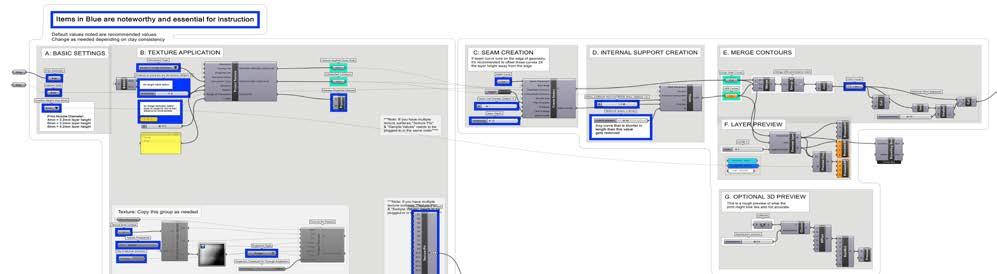
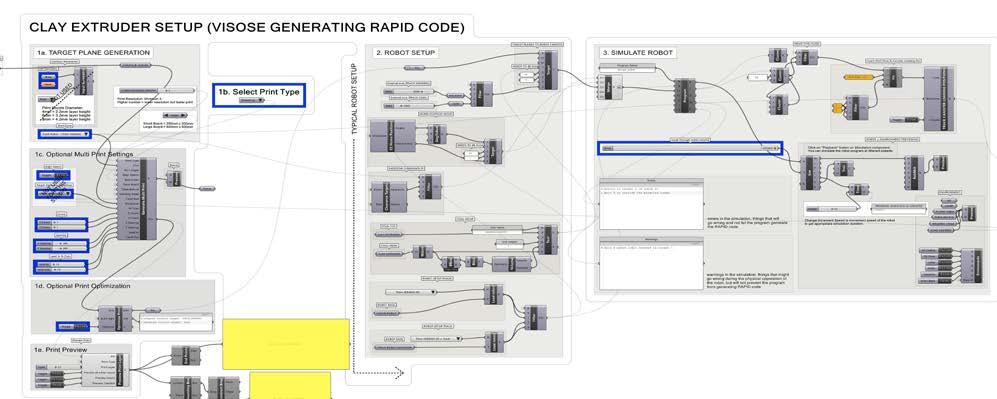
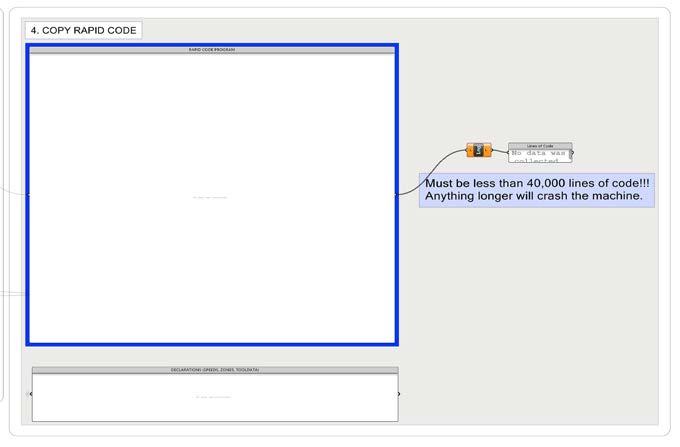
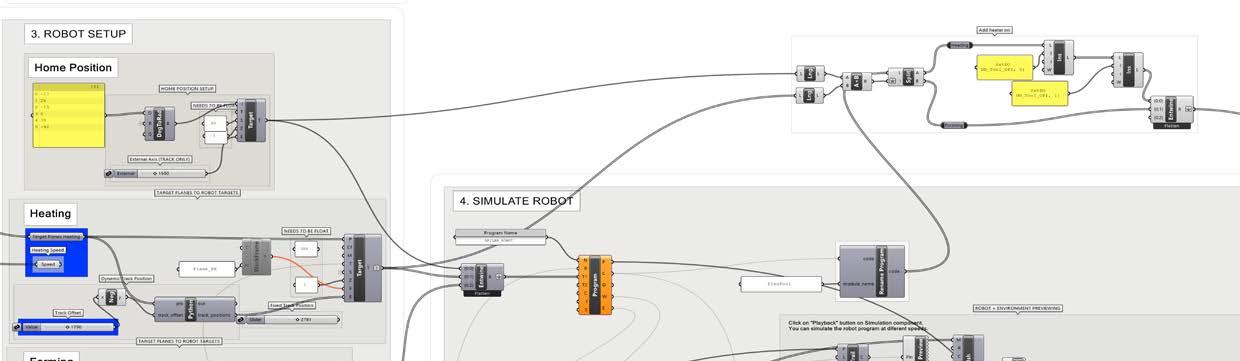
The process integrates robotics, Grasshopper, and RobotStudio to accomplish printing. Initially, a group of components is established in Grasshopper, where both external and internal support breps are inputted. The model is then transformed into printable paths, and images are projected onto various surfaces to create micro-relief effects. Subsequently, the printing paths are decomposed into points and TCP (Tool Center Point) Planes, which serve as the robot's Target Planes. A 4600 Floor robot is selected for robot setup and simulation. Following the simulation, RAPID code is exported and transferred to RobotStudio, and then to the robot to complete the printing process.

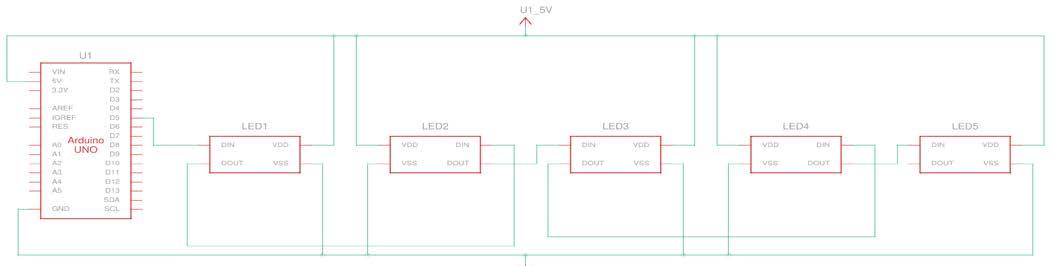
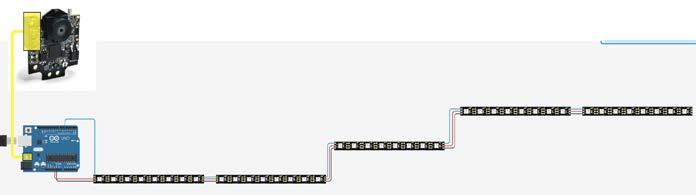
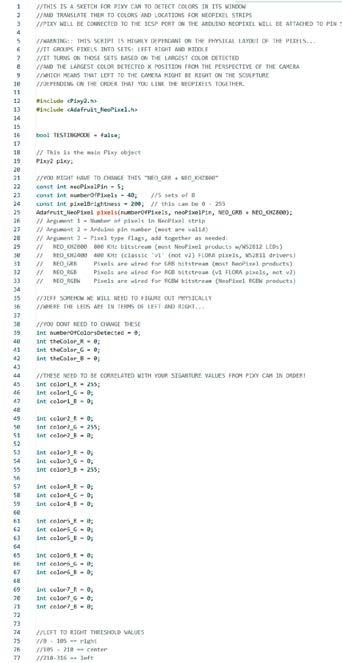
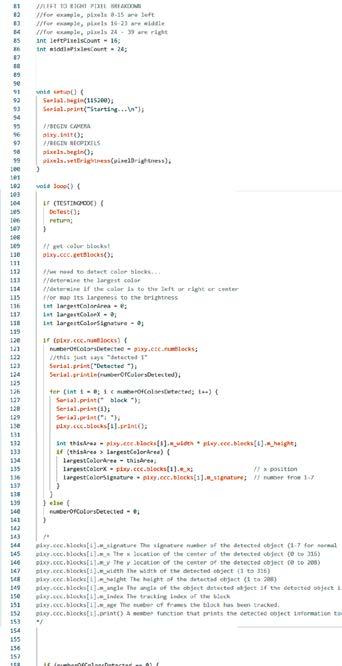
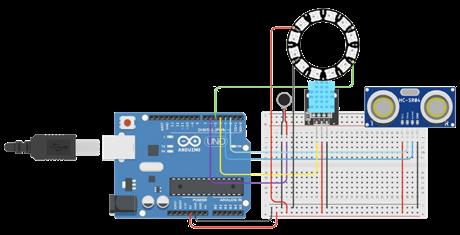
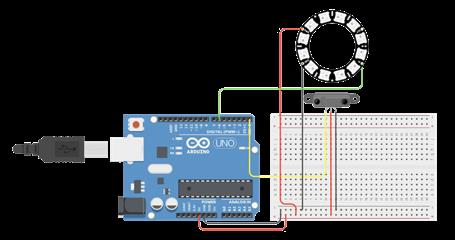
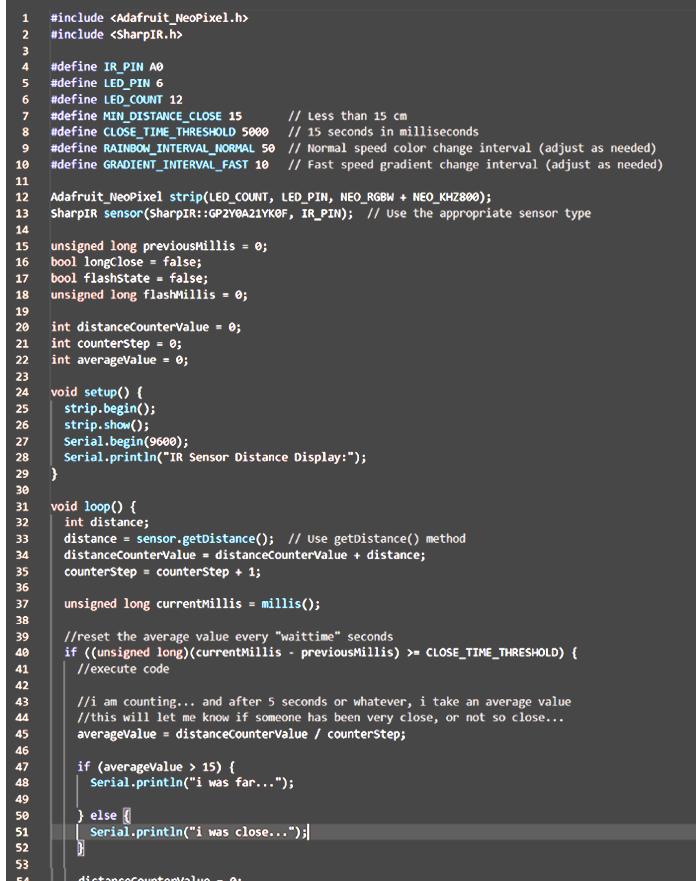
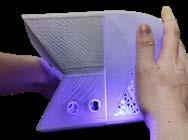
Final interactive prototype, we used Camera(sensor) and 6 Neopixel light belts (actuator) to animate our architectural form through human and environment color interaction. Our sensing and actuating circuit were artfully hidden within and designed in coordination with our project. (We used Arduino IDE as the platform to develop the code.)
ROBOTICS PROGRAMMING
CYBER-PHYSICAL INTERACTIVE SYSTEM
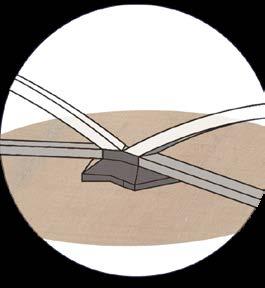
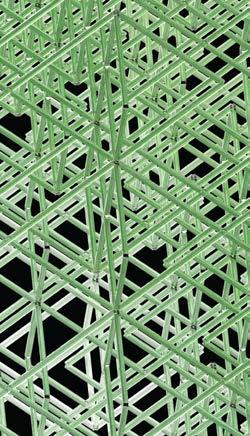
The courtyard design is rooted in Robinson Fredenthal's infinite grid system, giving rise to an ever-expanding array of geometric shapes that converge into a unique spatial forest - the Robinson Fredenthal labyrinth. This intricate layout merges positive and negative geometric forms, seamlessly interweaving upper and lower spaces to create an engaging journey for pedestrians. In terms of construction, large blocks are subdivided into 750mm, 1500mm, 3000mm, and 6000mm modules, while smaller bricks follow suit. The diagonal orientation of these components adds depth and spatial dimension. The saddle joint remains a key connection method, with brick sizes transitioning from small to large, imparting varying density to the building's façade.

COURTYARD - DESIGN
{A-7}
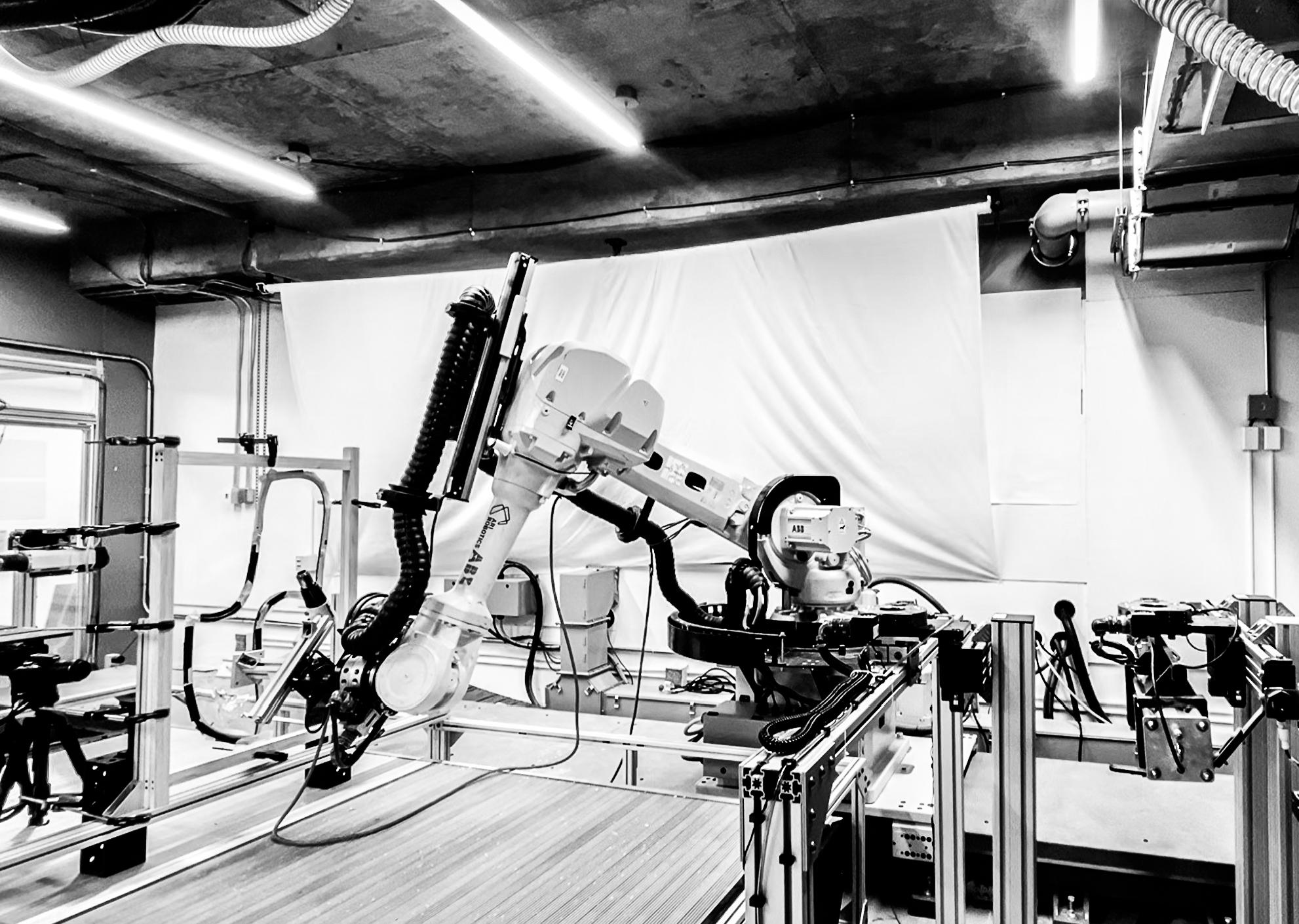
Localized Robotics Thermoforming
ACADEMIC, Individual Work, 2024 [Thesis Project]
Supervisor: Robert Stuart Smith (Email: rssmith@design.upenn.edu)
Partner: Claudia Campuzano, Yang Meng
Robotic thermoforming process that involves localized heating and manipulation of thermoplastic sheets; this labiates the need for molds in the thermoforming process. Our exploration extends to speculative design for building envelopes, where we investigate the aesthetic and production implications of a gesture-based approach to robotic thermoforming. This research offers a perspective on ornamentation and envelope design.proportions, composition, and elements, and then creating a Bespoke
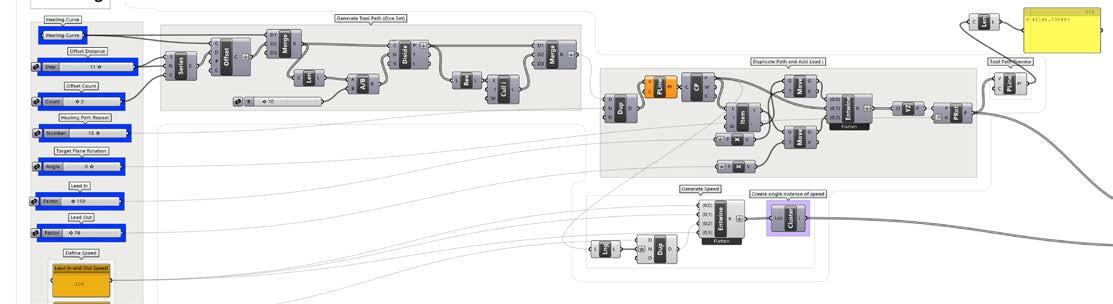
○ Heating Path and Temperature Curve
○ Parametric Heating Path and Forming Path Tests
The effectiveness of the heat gun is influenced by various factors, including the heating path, the distance between the heat gun and the PETG sheet, and the speed at which the heat gun moves. What is Interesting is that we discovered that different heating paths produce varied effects.
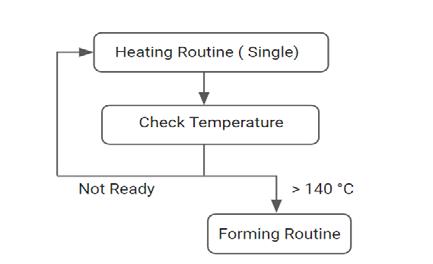
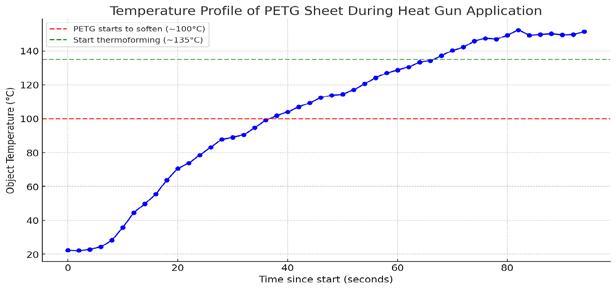
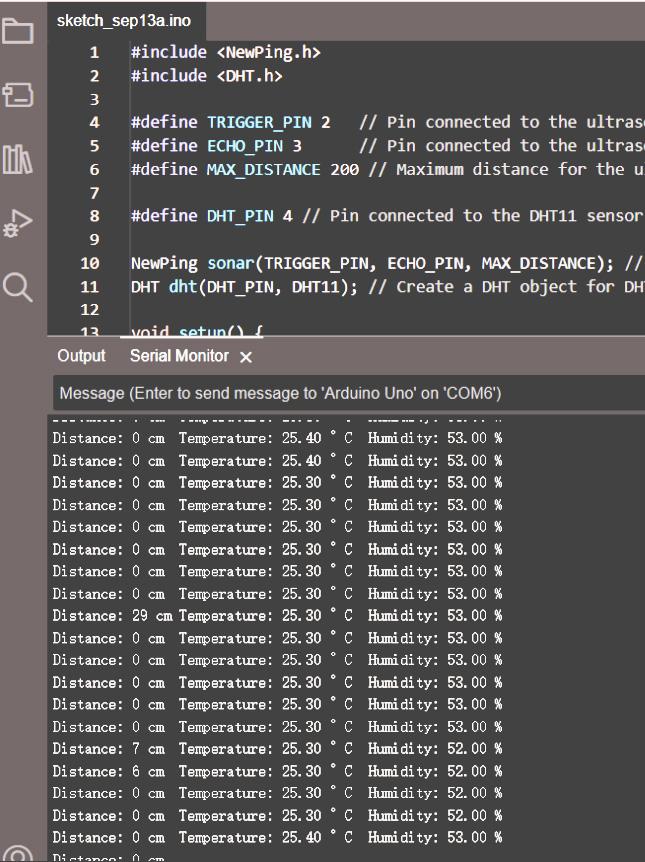
To minimize failures and enhance efficiency in thermoforming, precise control over the temperature of PETG sheets is essential. PETG’s glass transition temperature (Tg) is 84°C (Focke et al. 2009), where it becomes pliable and solidifies upon cooling. We incorporated an infrared sensor and an Arduino UNO module to facilitate the collection and analysis of temperature data. As depicted in , 1/16" thick PETG material reaches the Tg in about 30 seconds and becomes suitable for thermoforming upon reaching 135°C. The entire process takes approximately one to two minutes.
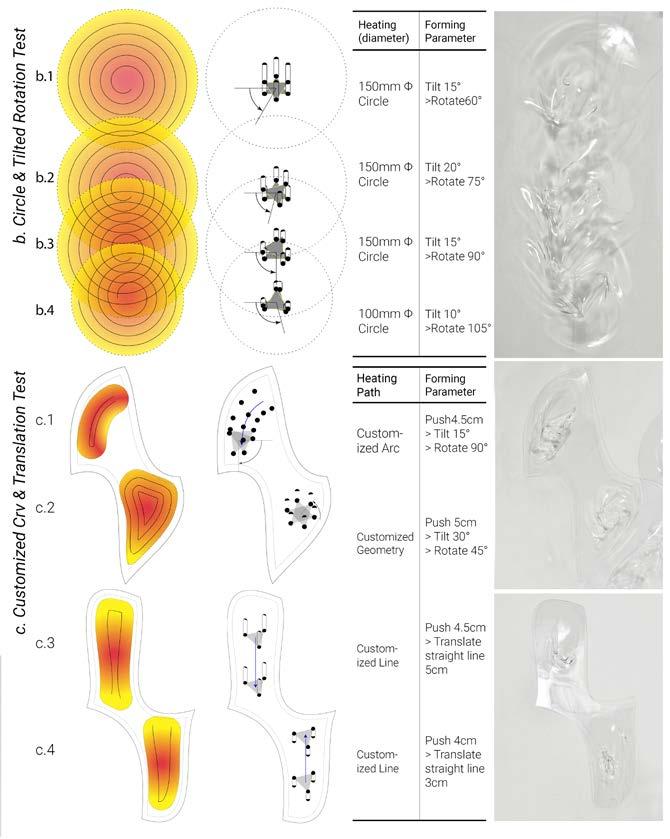
Robotics Gesture Catalog
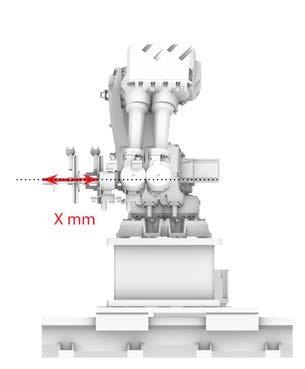
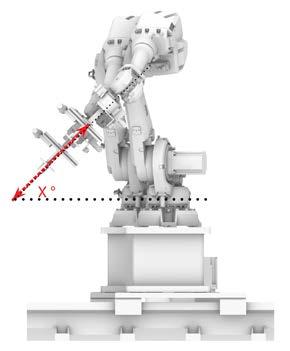
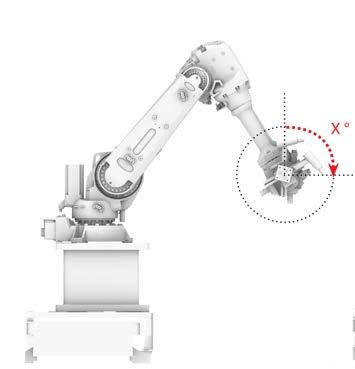
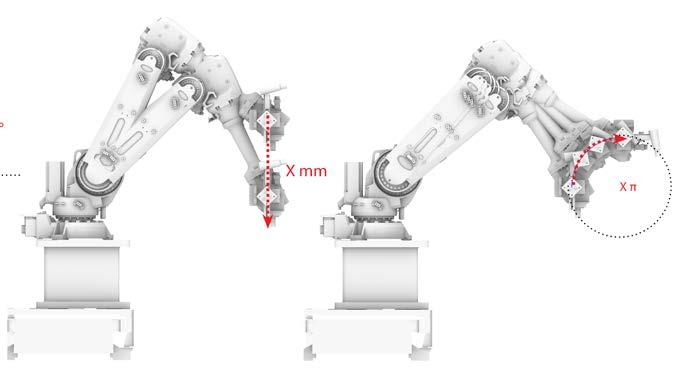
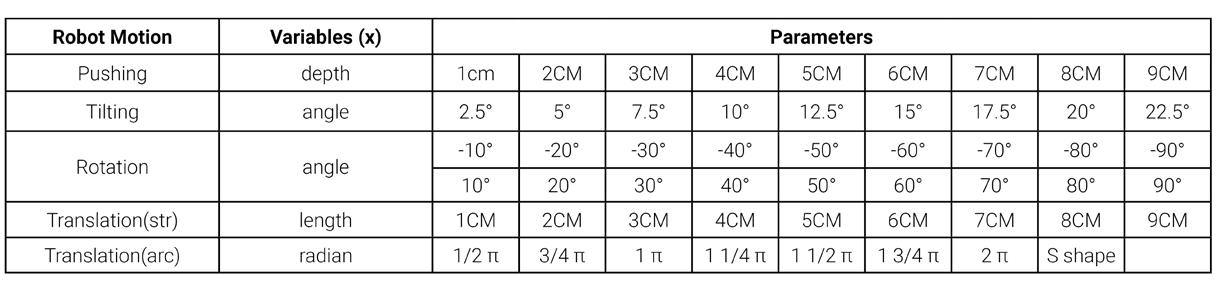
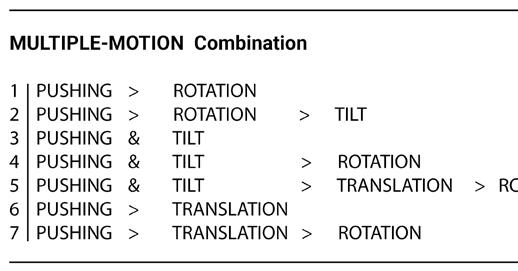
We further categorized and parameterized forming paths into gestures such as pushing, tilting, rotating, and translating along straight or curved lines, creating complex paths like tilting angle rotation, tilting angle translation, etc. Utilizing data from previous experiments, we conducted additional tests on robotic gestures to refine our parameter catalog.
37 Thermal Control Results Heat path 1: Linear Heat path 2: Circle Heat path 3: Arc speed Temperature time Temperature time Temperature time Linear Path: Although it provides uniform heating, the process is relatively slow. Spiral Path: This path heats faster and can adapt to various shapes, making it more versatile. Arc Path: It is the quickest method for heating but challenges in heating large areas effectively. However, it creates interesting path effects that can be integrated with forming paths. ThermoMorph : Localized Robotic Thermoforming Workflow Development : Experimental MSD-RAS
Pushing Tilting Rotation Translation(Str) Translation(Crv)
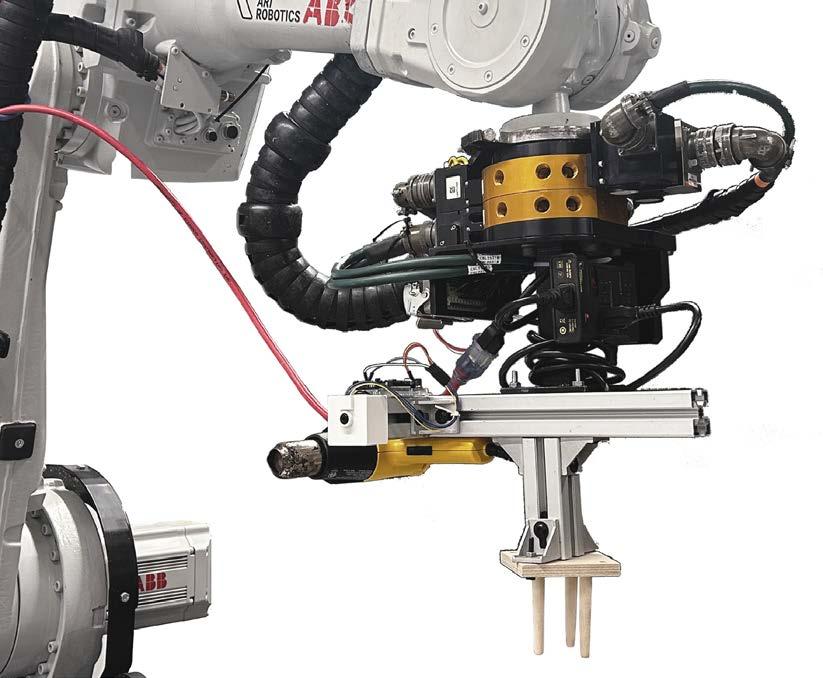
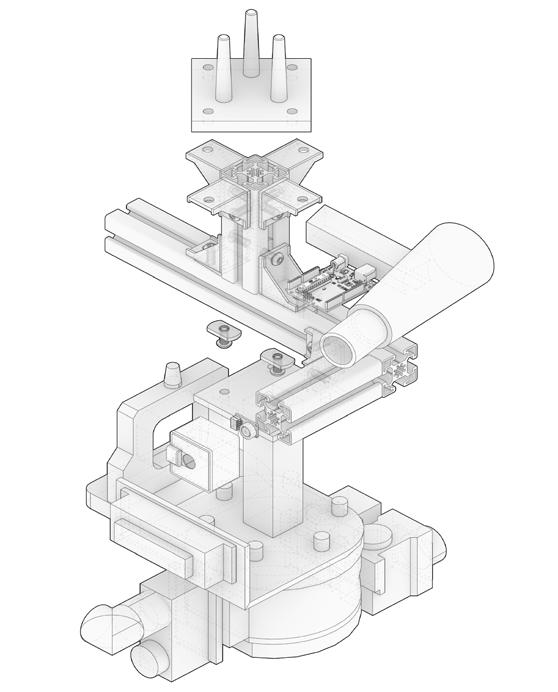
○ Robotics Dual-End Effector Design
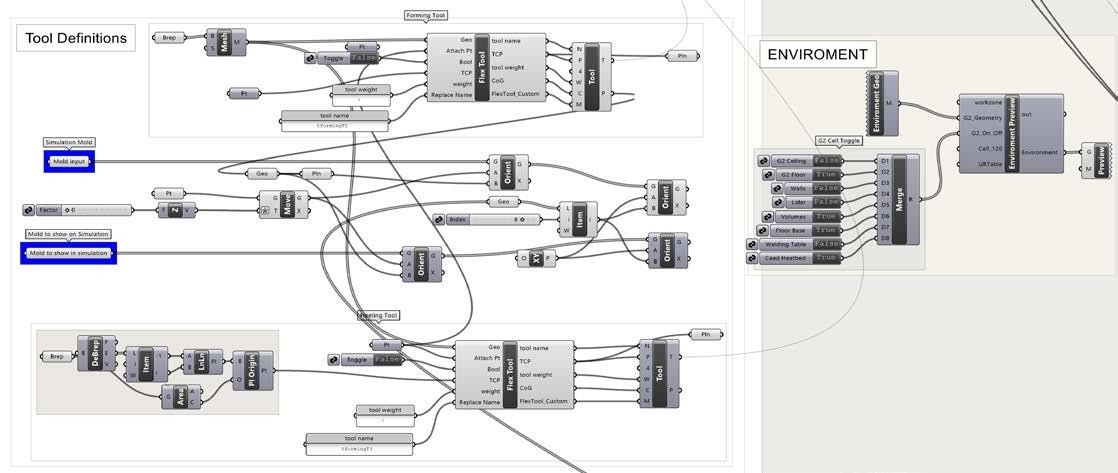
Tool Definition & Heating Forming Path Script
In our research, we introduce an innovative end effector that combines the heating and forming processes in thermoforming, and real-time temperature control. This allows for localized and repeatable heating and forming operations.
In our research, we introduce an innovative end effector that combines the heating and forming processes in
incorporating infrared sensors for precise data collection and thermal control.
Cyberphysics Thermal Control System
In this experiment, our goal is to investigate the following question: How can we use our heating tool to generate a gesture-based approach in our design? Within this study, we utilize Grasshopper to achieve more control and precision in the parameters.
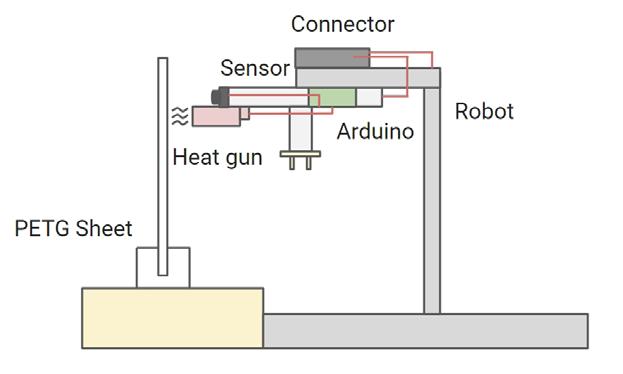
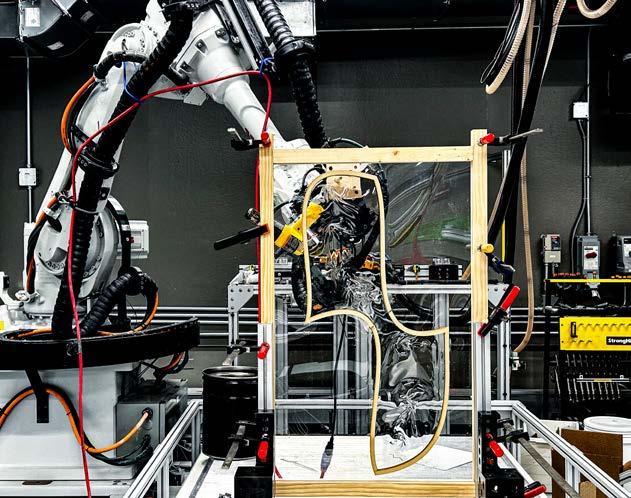
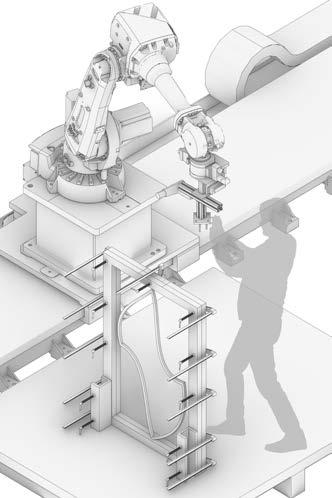
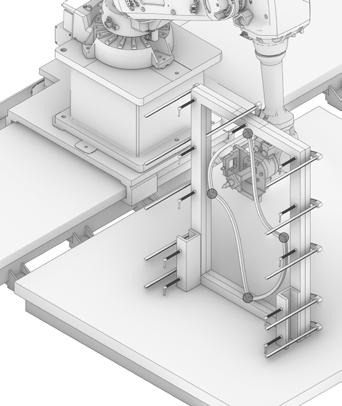
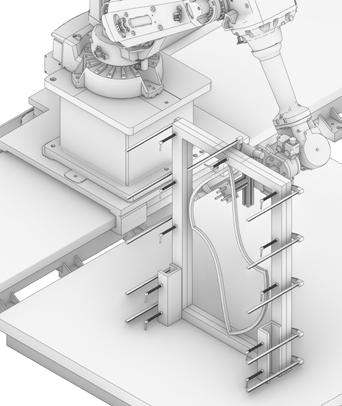
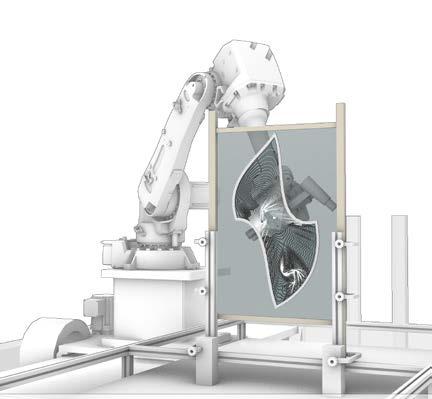
Applying knowledge gained from 2.3, the robotic fabrication setup from 2.2 was extended through the addition of a new dual-head EOAT that consisted of the 3-prong forming tool and Experiment 2.3 selected heat gun. An infrared sensor was also incorporated to provide feedback on a PETG sheet’s temperature during heating. A larger PETG sheet size of 24” x 36” and 1/16” thickness was employed and clamped in between two layers of wood in a vertically orientated 22” x 40” frame.
Workflow Development Fabrication Process Heat gun Arduino Infrared Sensor Forming tool Heat gun Arduino Infrared FlexTool Forming Heat gun Arduino Infrared Sensor Forming tool
ThermoMorph : Localized MSD-RAS
thermoforming,
Thermal Control Results Heat path 1: Linear Heat path 2: Circle Heat path 3: Arc speed Temperature time Temperature time Temperature time ThermoMorph : Localized Robotic Thermoforming Workflow MSD-RAS
○
○


○ Localized Heating and Themoforming Simulation Developing

A closed-loop approach to iterative, multi-pass localized robotic heating and forming of PETG thermoplastic sheets was developed and evaluated for its ability to produce custom-formed parts that embody several different ornamental features formed from different draft angles (angles of incidence). The method incorporates temperature sensor feedback during localized heating and explores different patterns and quantities of robot tool-path motion for both heating and manipulation-based forming. A robot milling routine is also incorporated to support the manufacturing of sheets with a variable boundary shape. A series of heating and forming approaches are tested and evaluated within the robotics facility using an ABB IRB 4600-60 tracked robot.
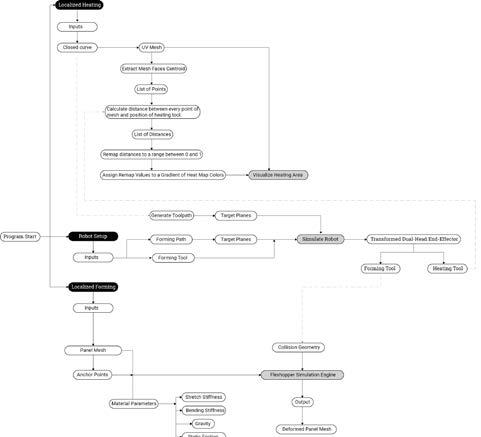
A simulation workflow was developed that served as a predictive model for robotic thermoforming and acted as a feedback loop throughout our process (Figure 15). More importantly, it enabled our design speculation of building envelopes that would not be possible otherwise. To evaluate the ability of the simulation to represent manufactured outcomes, a series of PETG sheets were physically formed and 3D scanned using AESUB Blue 3D Scanning Spray to ensure the visibility of the transparent sheets during scanning. (Figure 16) Scan results were compared to digital simulated outcomes of the same robotic manufacturing operations. Deviations between the simulation and physical outcomes are depicted in Figure 17. Visual observation also indicates that simulations did not capture all small-scale details apparent in the physically manufactured parts but were effective at describing overall formal descriptions and character of each manufactured part, making the simulation suitable for use in design activities prior to fabrication.
○ Closed-Loop Manufacturing Process
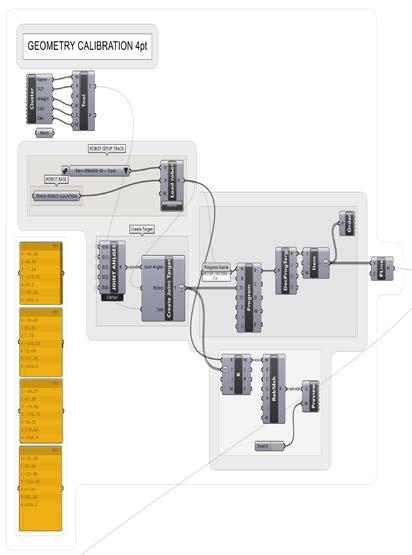
○ Simulation & Calibration Script
Calibration Dual thermoforming Milling
Thermoforming Process Milling-Spindle
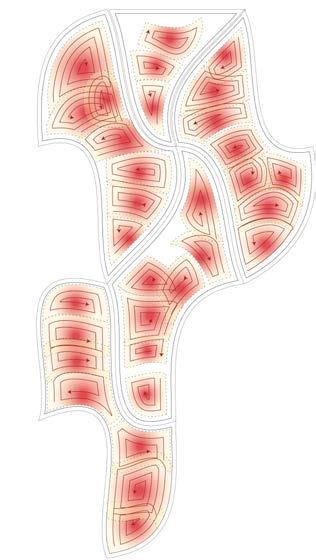
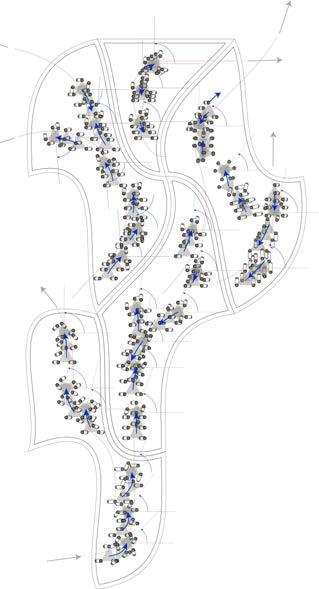
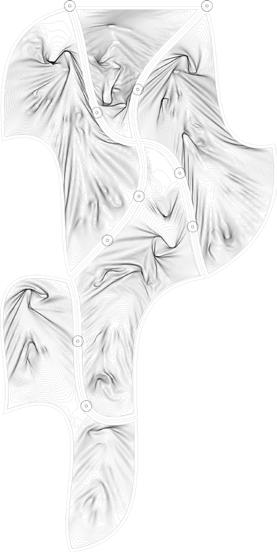
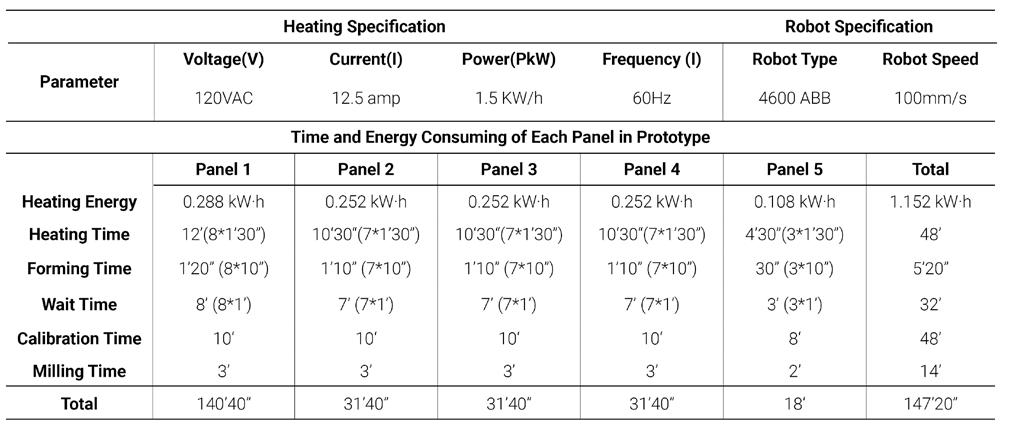
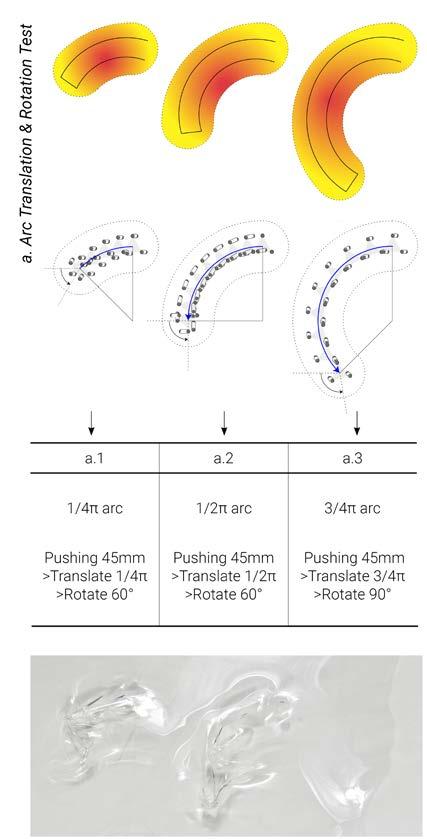
We applied the developed localized heating and robotic manipulation thermoforming process to a multi-part prototype measuring 1.6m in height and 0.8m in width, consisting of five custom-shaped and formed PETG sheets. Each panel underwent between 5 and 7 local robotic thermoforming operations. Customized heating and forming curves were designed for each panel shape. Adjacent heating regions partially overlapped to ensure that each forming operation could interact with and merge together to produce an overall coherent and complex thermoforming pattern-like effect. The forming paths use progressively increasing tilt angles and translation curves that aligned to the curvature of the panel's boundary curves and were constrained to lengths ranging from 4-7 cm, ending each translation curve with varying degrees of rotation, continuously increasing in a positive direction or alternating between positive and negative values .
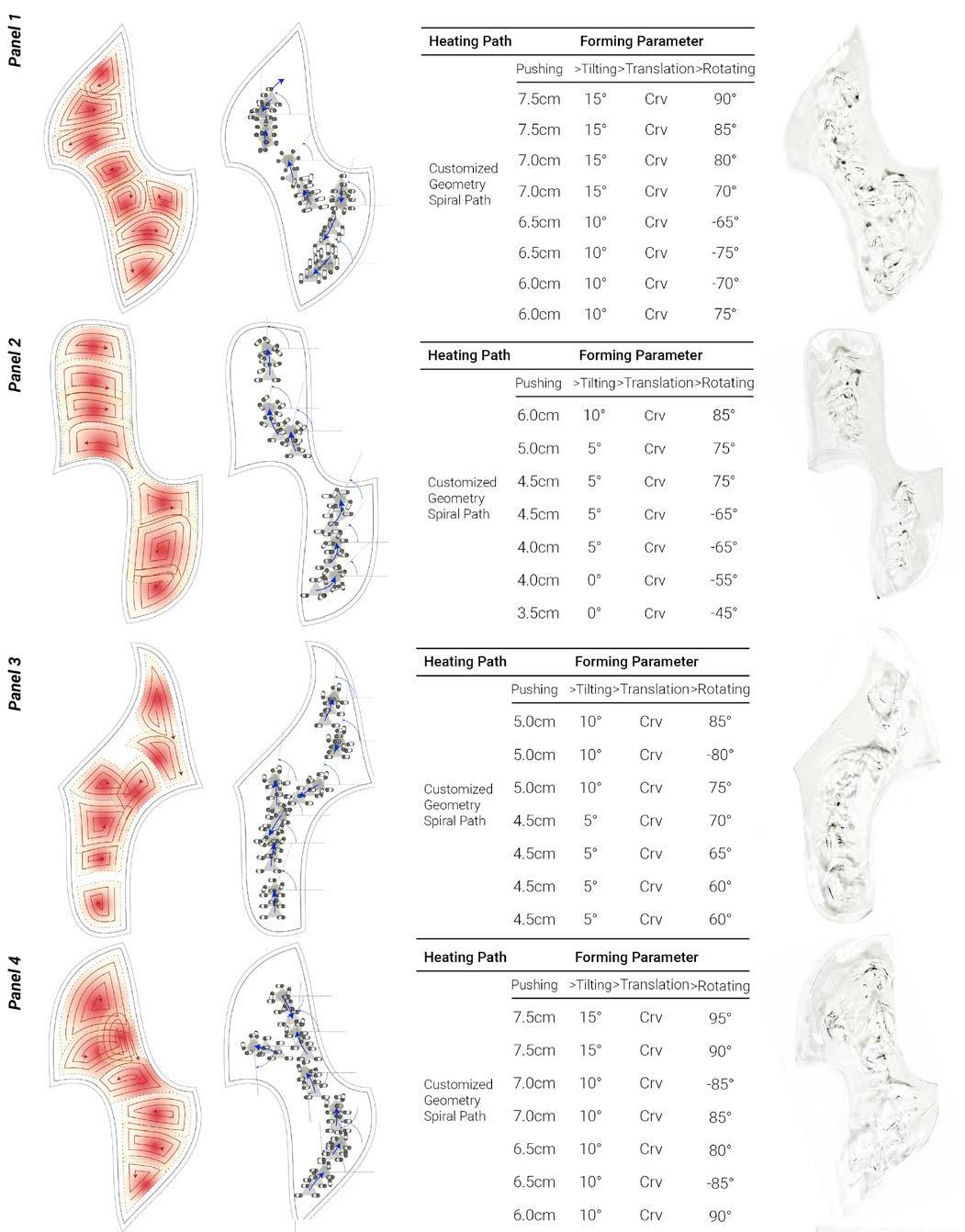
This aimed to produce an implied directional grain in the formed outcome of each panel. Through these multiple, localized heating and forming operations, the deformation appears to visually intensify towards the top of the prototype, with precisely graduated parameters that follow the prototype's geometric curves and flow patterns. Data on the entire prototype’s manufacturing process was recorded and resulted in an overall work-cell sheet calibration time of 48 minutes, an overall heating time of 48 minutes, a shared forming time of 37 minutes 20 seconds, and a milling time of 14 min. Time and energy consumption of each panel of the prototype
○ Multi-part Assembled Prototype Design and Manufacture



○ Potential Applications to Building Envelope
Arduino Sensor Interactive System
ACADEMIC, Group Work
Supervisor: Jeffrey Anderson (jsanderson.1512@gmail.com)
Course: Introduction to Cyberphysical System
Role: Electronic Design (80%), Physical Setup (80%), Coding (100%), Modeling (20%)
Partner:Yang Meng

This work explores control, feedback, energy and force in relation to interactions of matter, space and perceived activity (human or non-human), and the embedment of Internet of Things (IOT) technologies to drive additional design agencies.




B-3
OpenCV Coding Image Processing
ACADEMIC, Individual Work
Course: Machine Learning & Algorithmic Design
Supervisor: Patrick Danahy, pdanahy@design.upenn.edu












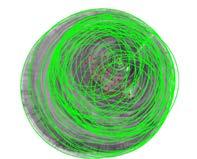

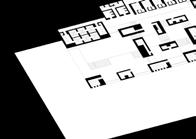
This project aimed to process 10 series of images by different algorithms on a open source platform - GoogleColab(/ OpenCV). 10 different algorithms includes: Threshold, Gaussian blurring, Gradient, Dilation, Canny Edge Detection, Hough line Transform, Hough Circle Transform, Watershed Segmentation Process, Interactive Fourier Transform, Perspective Transformation.
GoogleColab /OpenCV
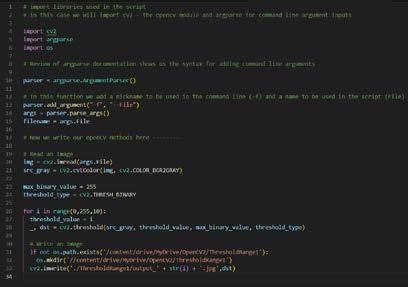

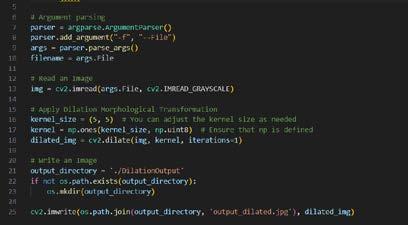
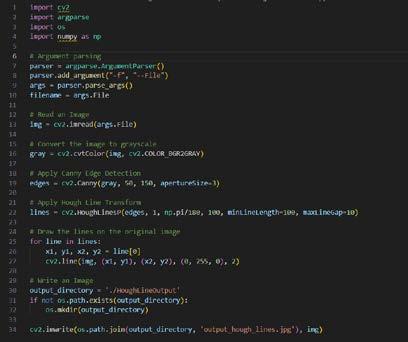
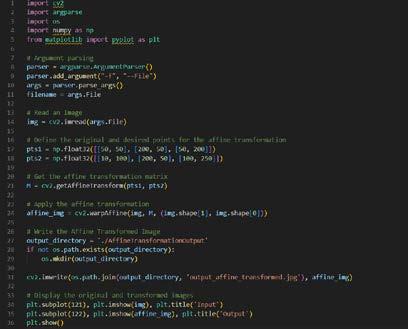
DIGITAL SETUP: ARDUINO IDE CODE COLLECT DATA VERSION 1.0 ENVIRONMENTAL SYSTEM VERSION 2.0 REFINE GEOMETRY 3D MODEL SETUP PHYSICAL SETUP ARDUINO + ACTUATOR + SENSOR WRITE SENSOR VALUE TO SERIOL MONITOR ULTRASONIC=DISTANCE, TEMPRATURE, HUMIDITY 3D MODEL MODIFICATION CODE MODIFICATION 12 RGBW Neopixel rings Ultrasonic Sensor TemperatureHumidity Sensor Vibrator 12 RGBW Neopixel rings Infrared sensor BE ASSEMBLED ThresholdRange Gaussian Blurring Hough Line Transform Dilation Perspective Transformation Hough Circle Transform Gradient
Image Process B-2
AGGRIGATION/ VOLUX
ACADEMIC, Group Work [2018]
MSD-Robotics and Autonomous System Summer workshop
Partner: Toto Tan, Riddharth Jain
Role: Conceptual Design (50%), Robotics Design(50%), Visualization (40%)


The number of parks throughout Philadelphia increases dramatically each year on the third Friday in September, when activists, artists, architects, and other citizens transform metered parking spaces into temporary public parks. Known as PARKing) Day, this annual event re-imagines the possibilities of 160 square feet of public space. The event celebrates parks and other public spaces in cities across the country, and raises awareness of the need for more pedestrian-friendly spaces in our urban areas Our installation will be made by robotics lattice plastic 3d printing on-site. We gave the lattice structure more variability by changing its cell shapes and colors. And we use the algorithm of recursive aggregation of Brownian difference sets between the water drop shape and the square shape to find the shape. Then use Z-brush to smooth the final detailed shape.
FORM AND ALGORITHM B-4
{A-6}
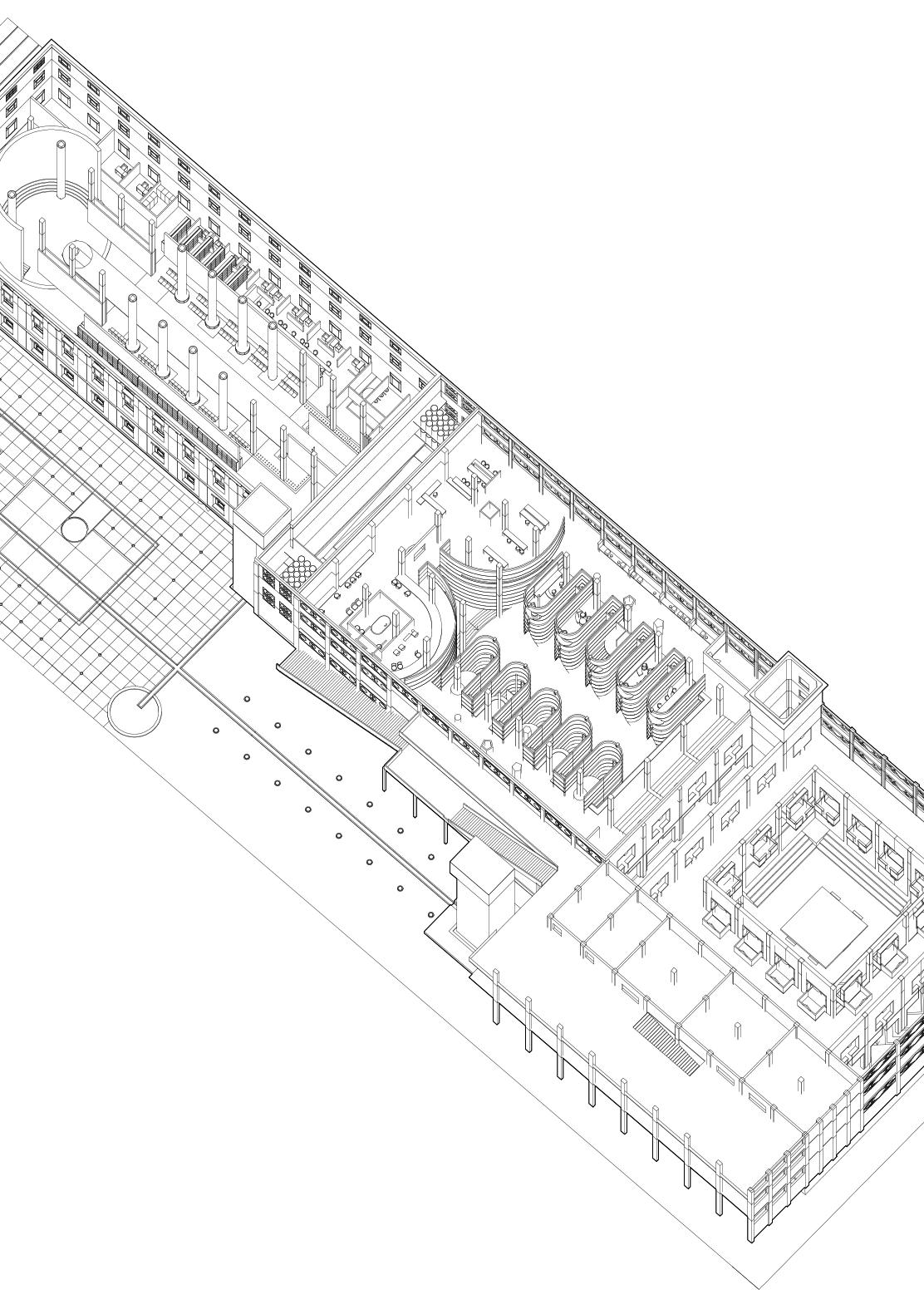
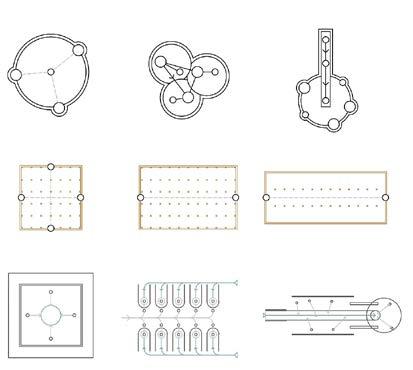
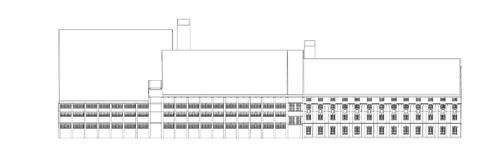
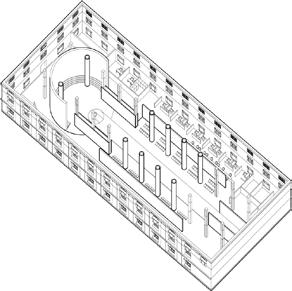
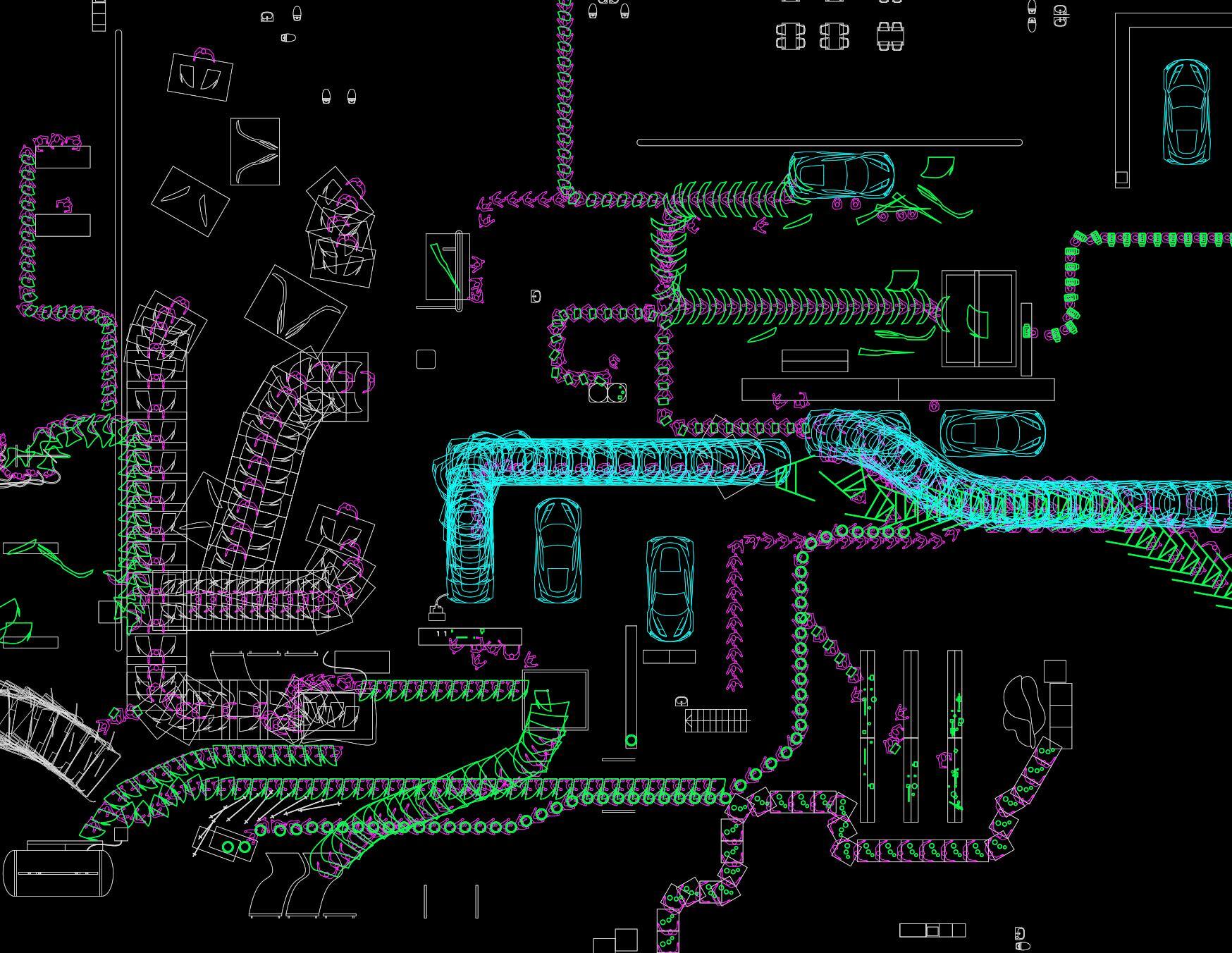
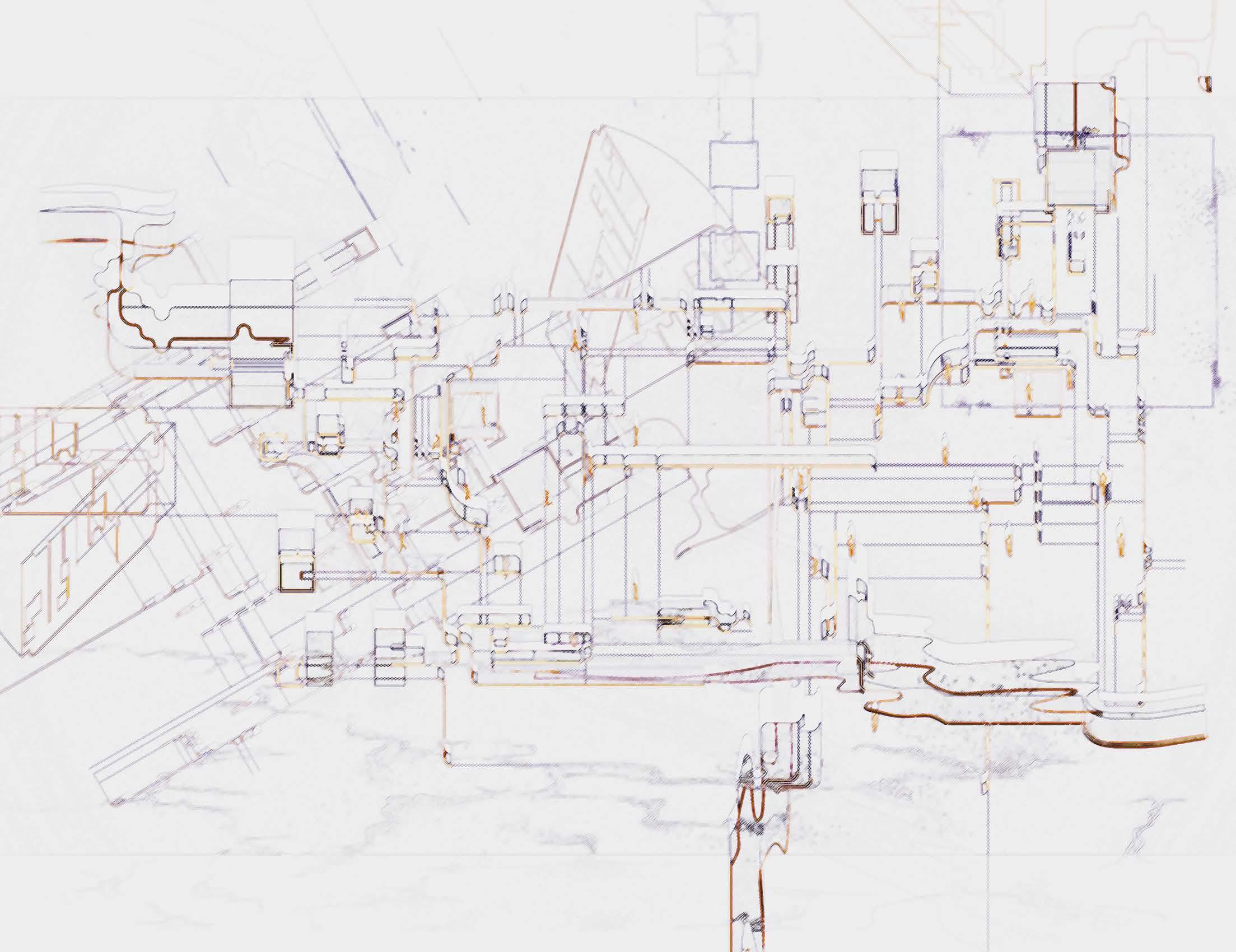
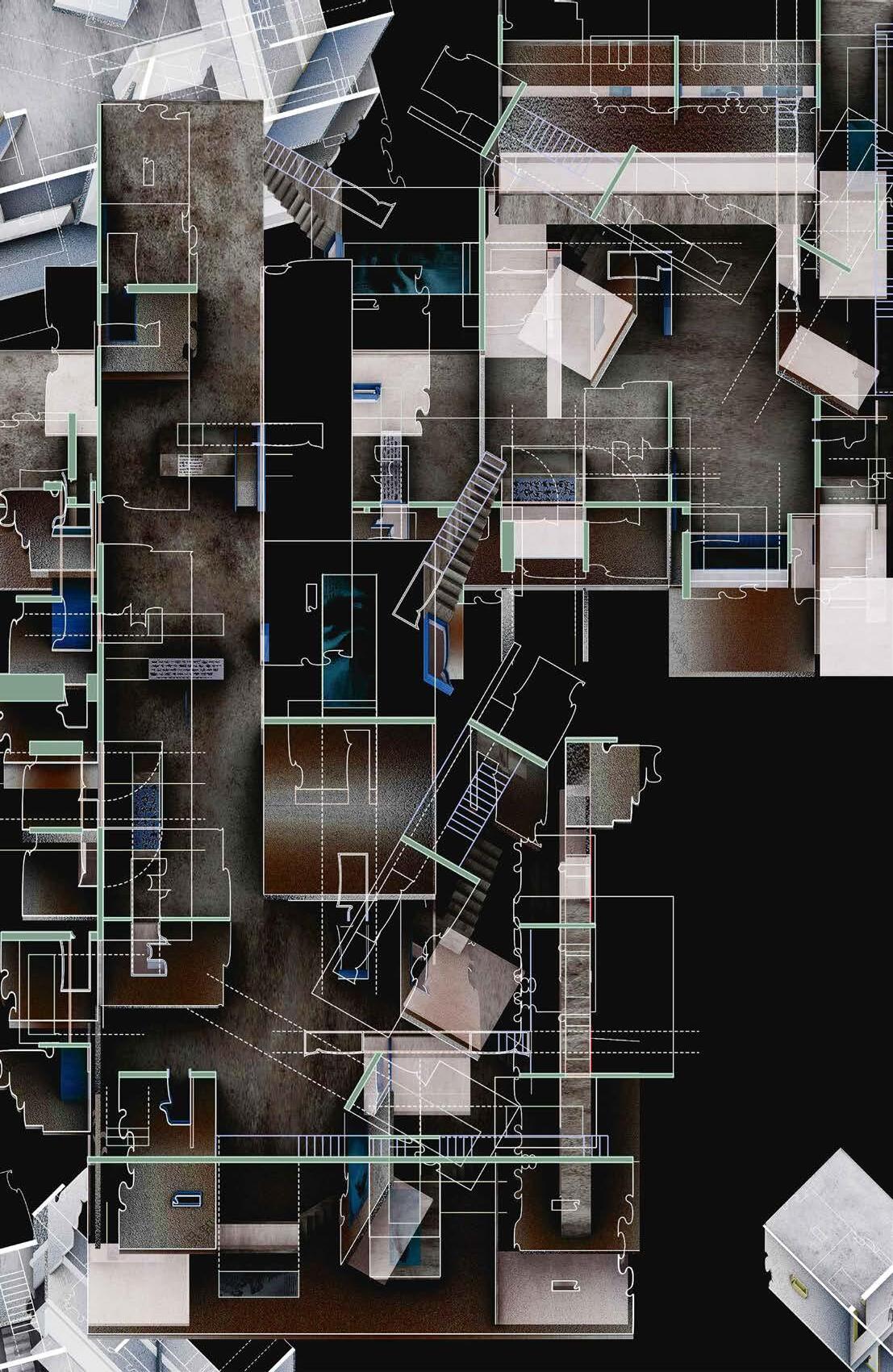
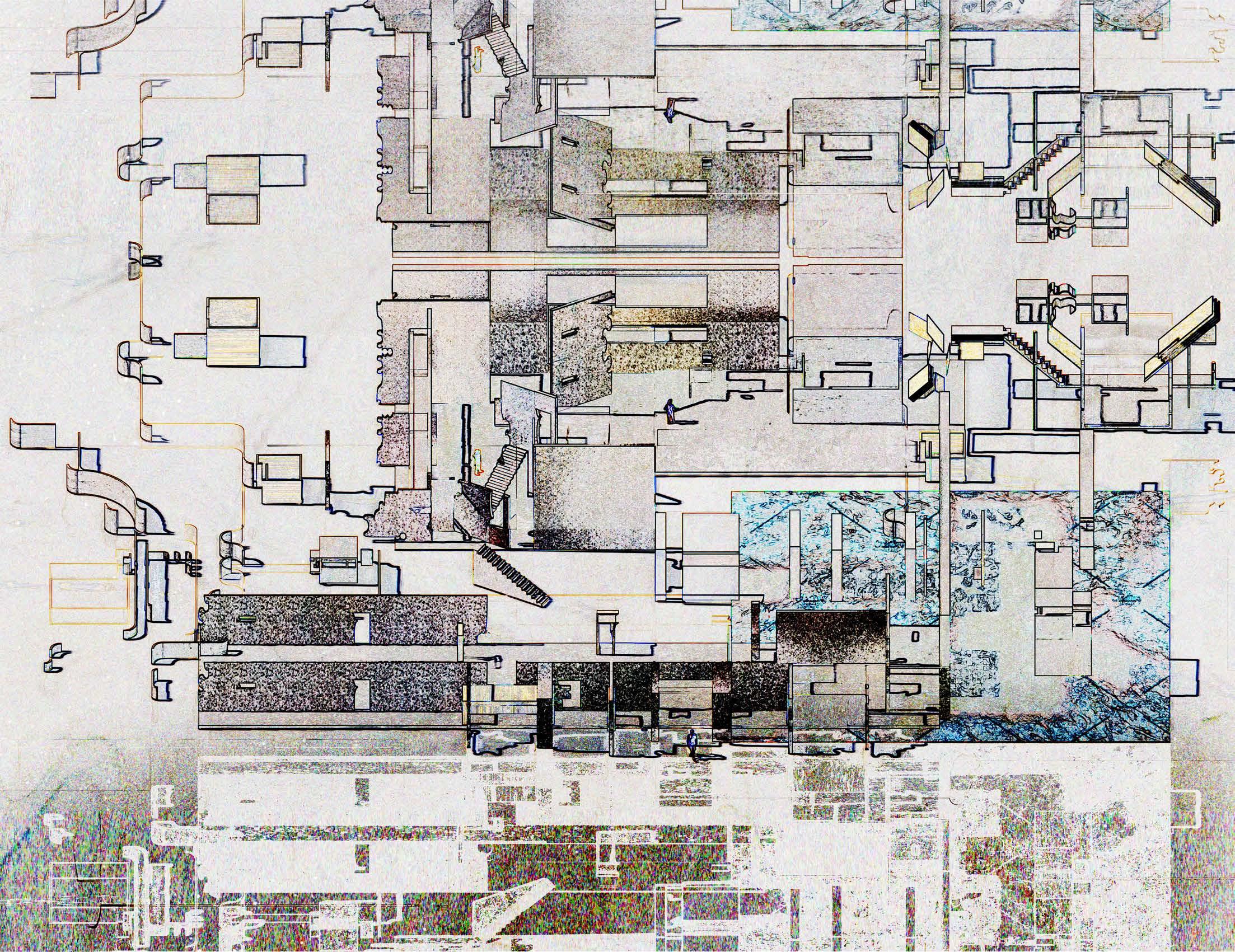
B ESPOKEN Z ENVO F ACTORY
ACADEMIC, Individual Work, 2020 [3rd Semester in Master]
Supervisor: Robert Brandt Trempe Jr (Email: rbt@aarch.dk Tel:+45 8936 0232)
Site: Hamburg Harbor | Supercar factory renovation design
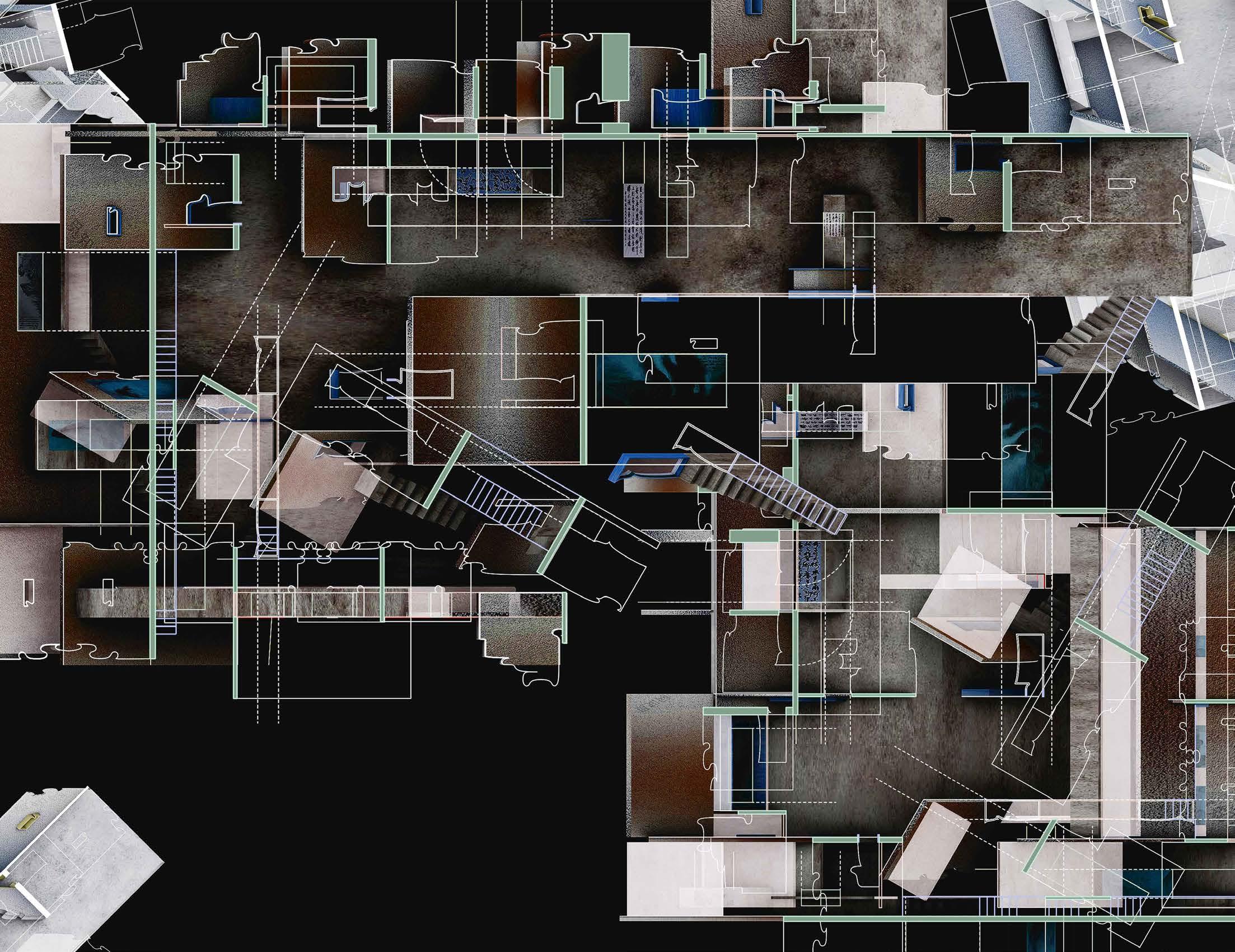
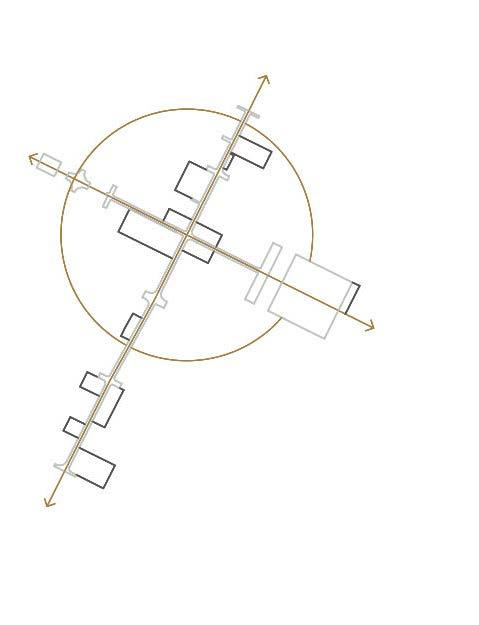
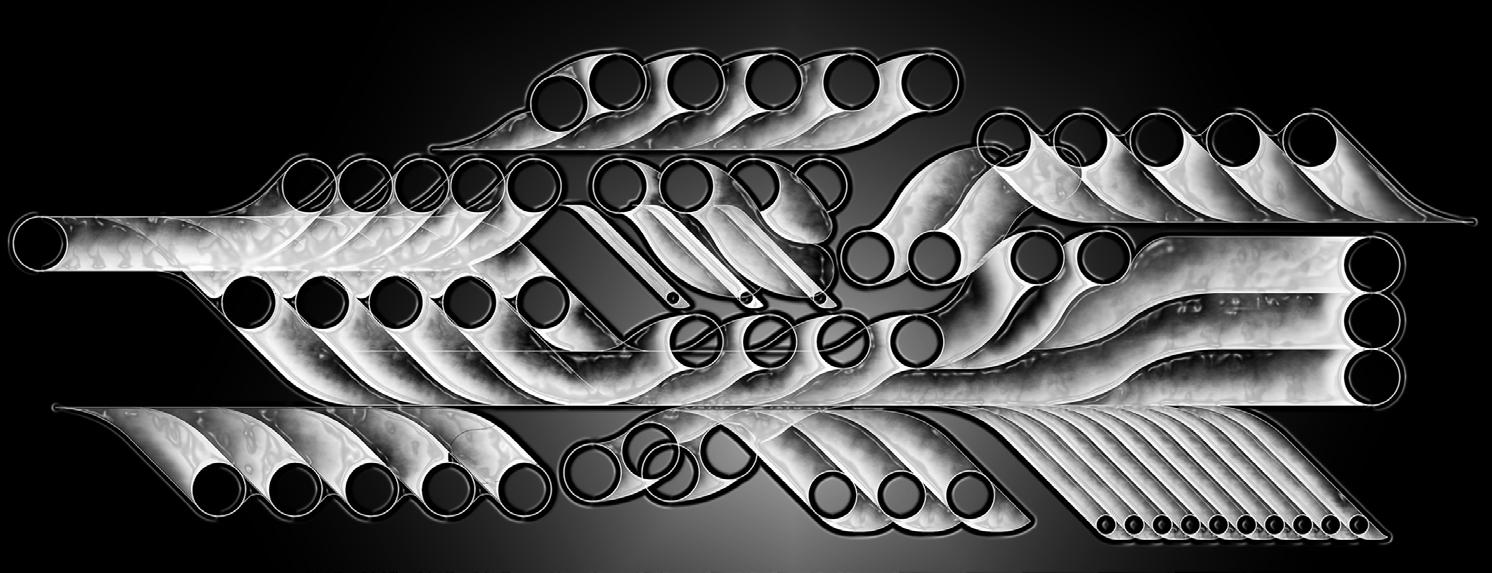
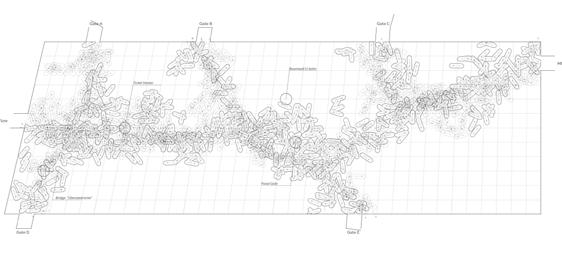
The project is to edit, extend and reconstruct the existing Zenvo supercar factory. Bespoke is the decisive factor within the methodology designed. Through tuning the existing manufacturing process drawing in an aesthetics evolution, the customized supercar factory is generated. Then, multiple line manufacturing correspondent section drawing and one-line manufacturing correspondent section drawings were generated. I think architectural painting has become the tools of analyzing information in this process, by visualizing the information, exploring the most essential features of architecture through the balance of graphic aesthetics, proportions, composition, and elements, and then creating a Bespoke architecture.

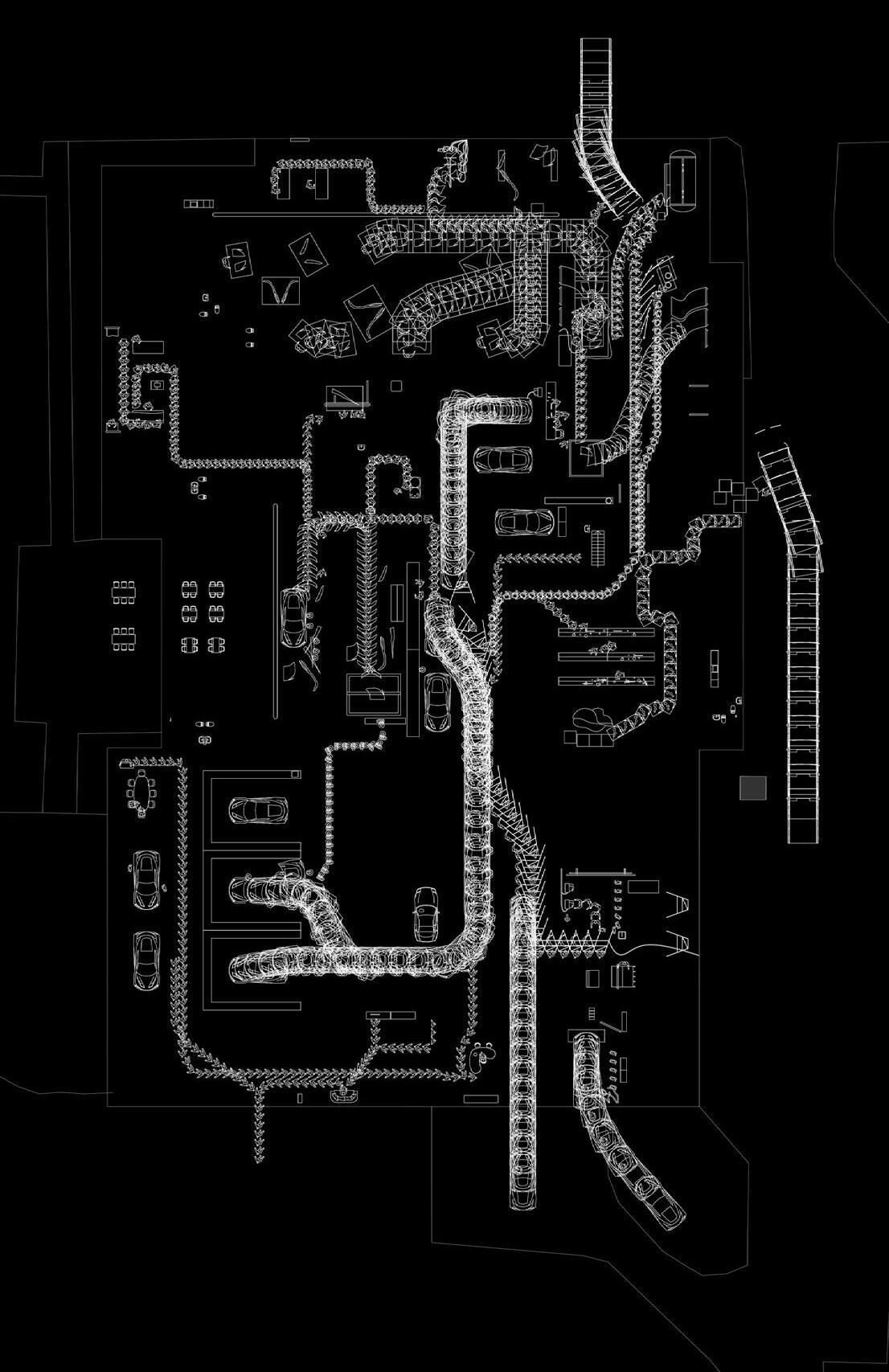
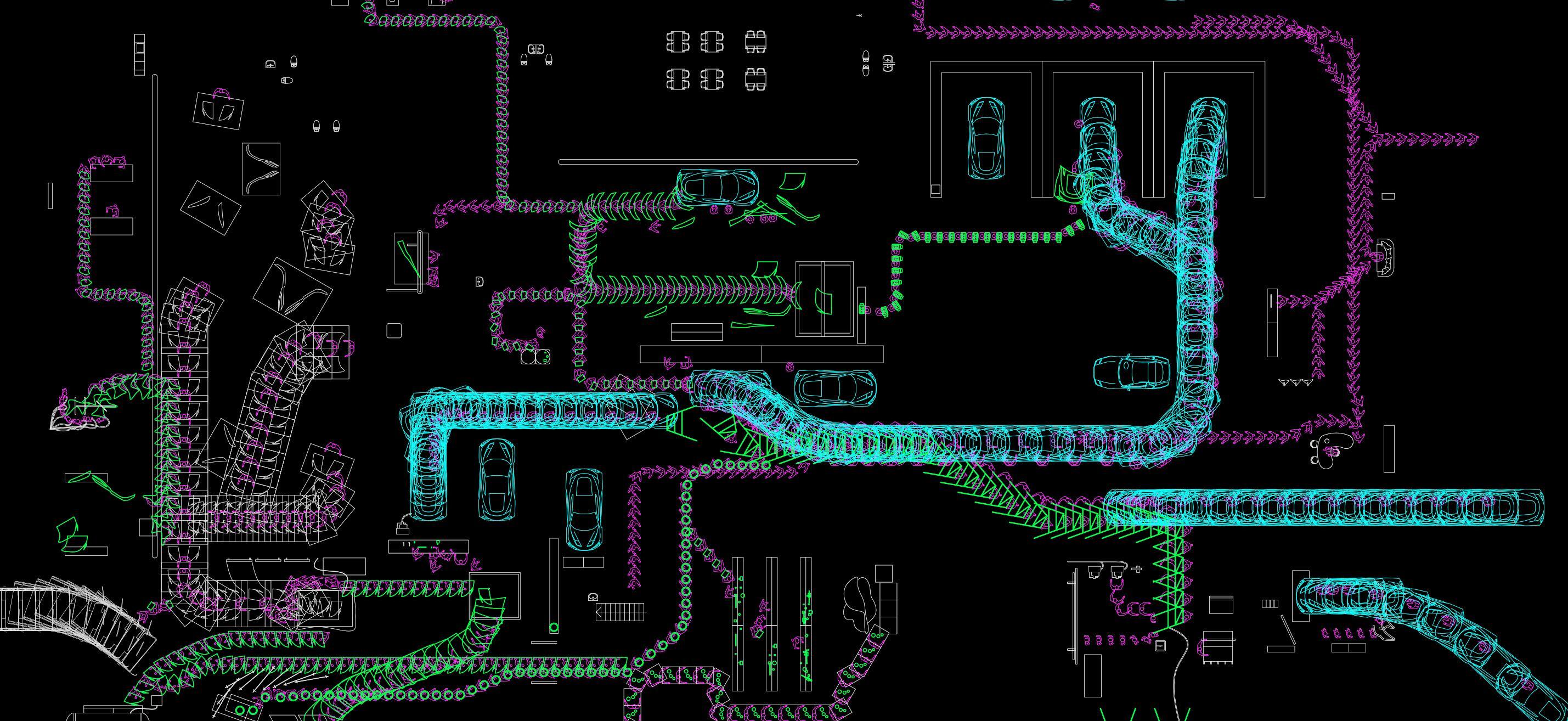
1 Entrance 2 Exhibit 3 Reception 4 Customize the car 5 Office 6 Meeting room 7 Toilet 8 Assembly 9 Engine 10 Prototype Room 11 3D Printing Room 12&13 Carbon Fiber Fitting 14 Spray Room 15 Eye & Bandage 16 Storage 17 Office/Bandage 18 Dyno-Car Testing 19 Carbon Fiber Shaping 20 Carbon Molds Storage 21 Parking STATIC MANUFACTURING PLAN DYNAMIC MANUFACTURING PROCESS At the beginning of research on the manufacturing process, firstly, I tried to visualize all the movements of the existing Zenvo factory, including workers, cars, and parts.
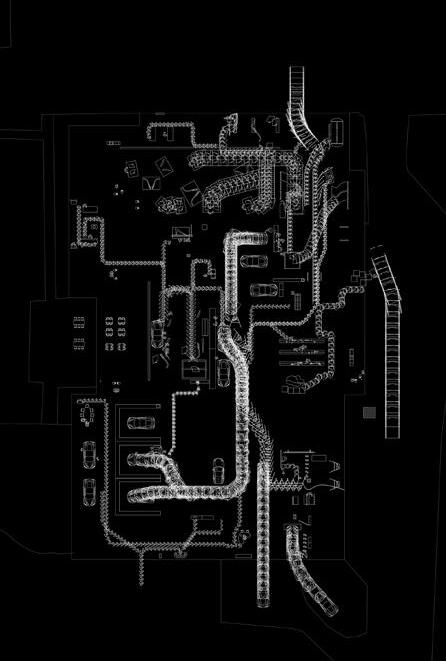
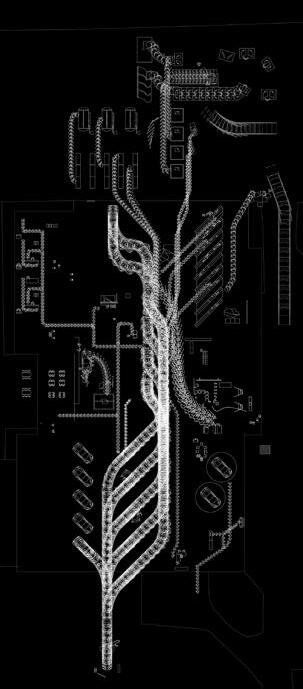

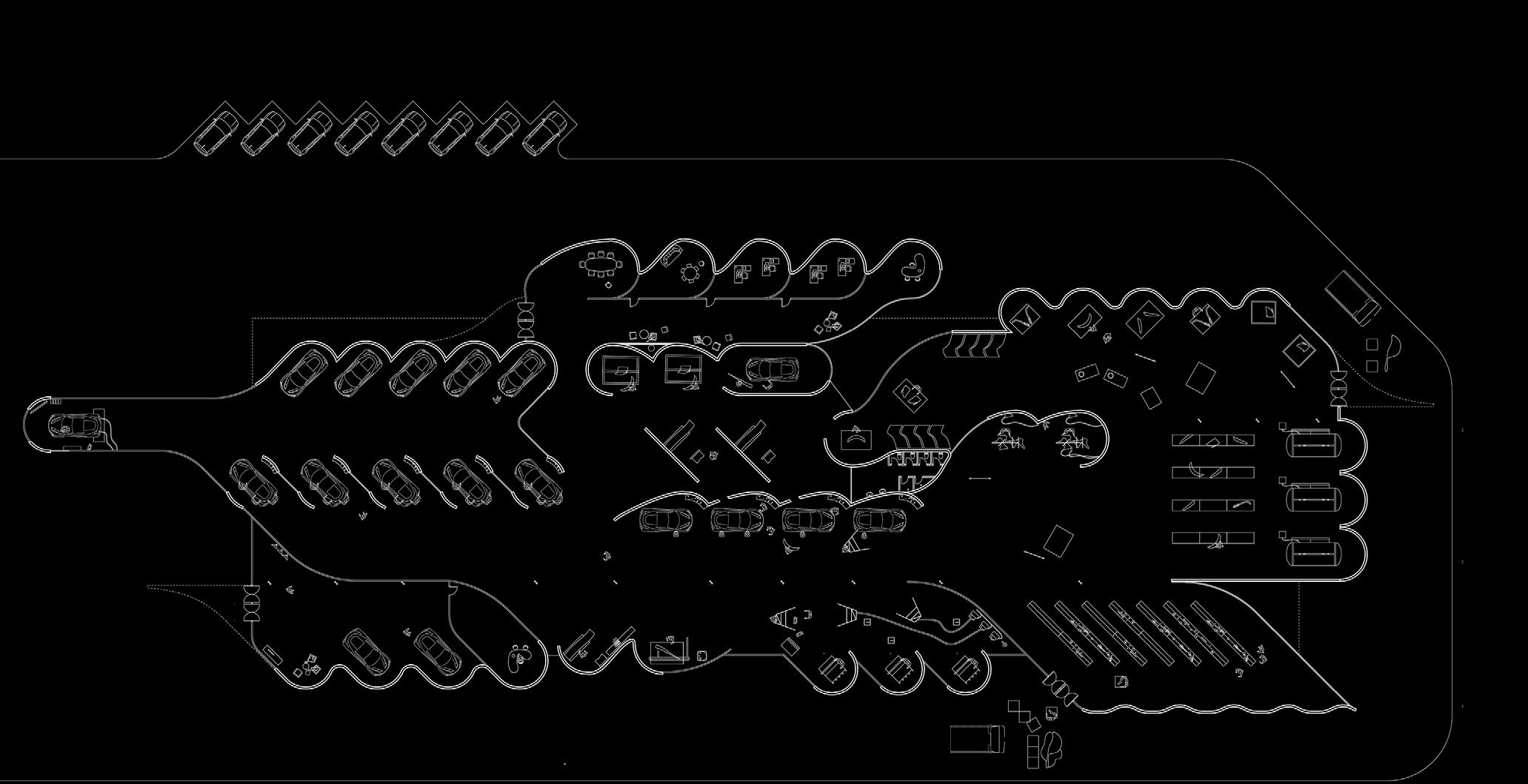

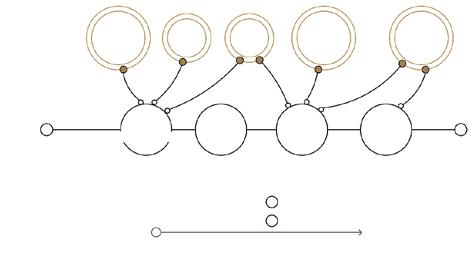
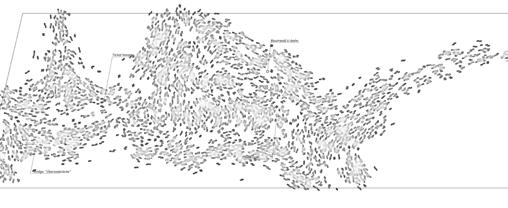
As in the exploration of architectural drawing, I tried to abstract the physical motions into abstract static stopping points and dynamic trajectories, by circles and rounded contour patterns respectively. Represent these two elements and fill them with a gradient of black and light. At the same time, architectural drawing, as a new research object takes priority over the information behind it. It is found that the operation of graphics by the subconscious will further strengthen the sense of stagnation and flow. However, looking at this painting again, I found that the radii and chamfers of the pipes for people and cars are different, destroying drawing's aesthetic. Therefore, by filtering the essence of the painting and extracting the most critical geometric elements, I created the second architectural painting(right) for the purpose of optimizing the sense of flow. You can find that the right one is more harmonious than the middle one, and you can feel the energy transfer within the drawing. It also increases the sense of juxtaposition, forming a new infinitely developing order prototype, which seems to flow unhindered. This is in line with my architectural purpose (to create a smoother Zenvo manufacturing flow).
1 Entrance 2 Exhibit 3 Reception 4 Customize the car 5 Office 6 Meeting room 7 Toilet 8 Assembly 9 Engine 10 Prototype Room 11 3D Printing Room 12&13 Carbon Fiber Fitting 14 Spray Room 15 Eye & Bandage 16 Storage 17 Office/Bandage 18 Dyno-Car Testing 19 Carbon Fiber Shaping 20 Carbon Molds Storage 21 Parking ABSTRACT MANUFACTURING DRAWING & LEADING TO
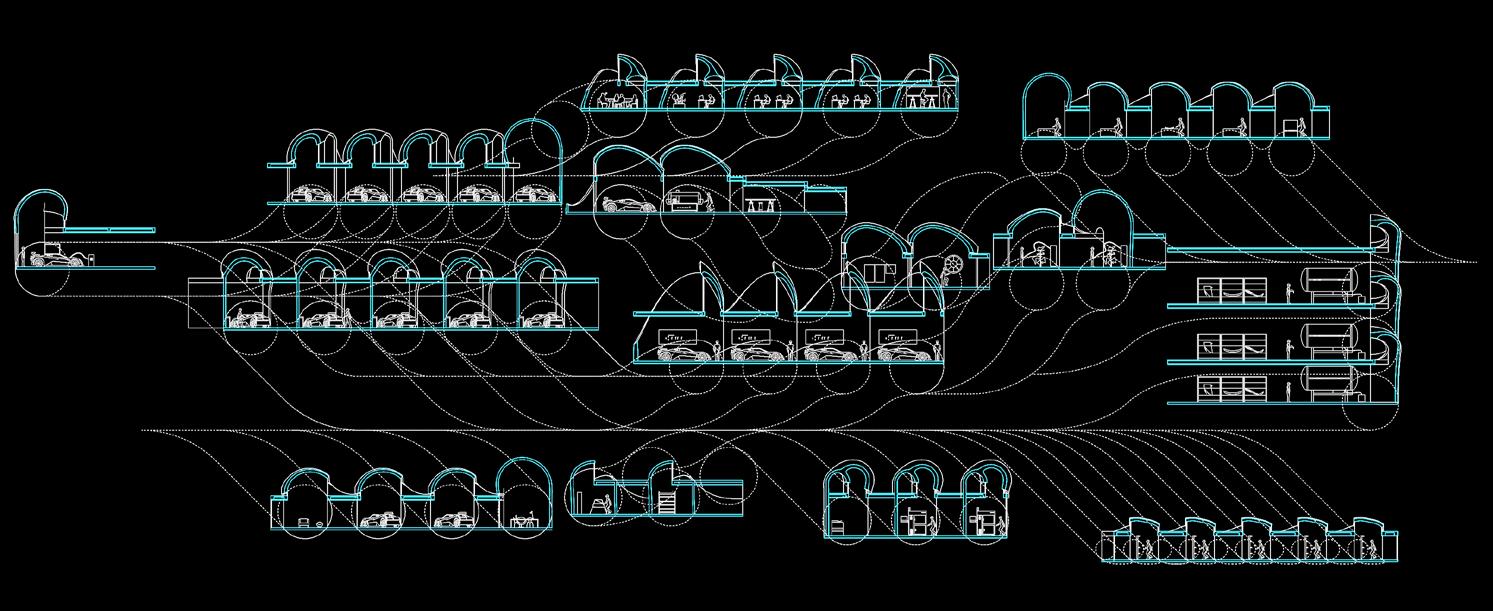
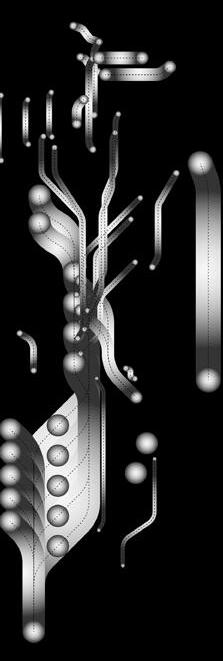
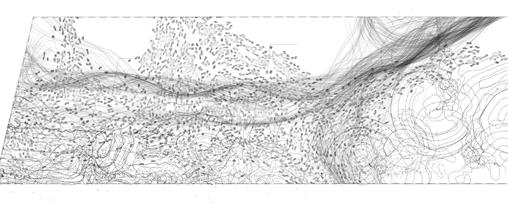
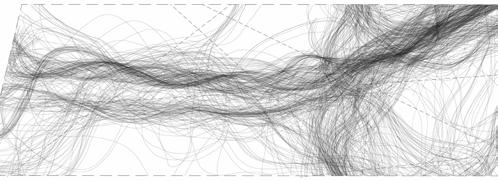
Movement and stillness are a pair of relative concepts. In some way, stillness can express movement. As for the city's bus system, we feel the bus when it stops at bus stations, and the station (the direction of the road) implies the direction of the car’s movement. Therefore, I picked a static point (that is, the circular element in top drawing) to place the walls. And by fabricating curved shapes, different curvatures suggest the direction of movement. Expressing movement by statics is a kind of logic and ideological liberation. The pressed surface has a dynamic trend as if the movement of the object drives the flow of surrounding molecules, energy, force, and fields. The flowing sense is expressed by the overlapping of the diagram and the multiple-line section drawing. The static sense is expressed in the vertical section of each solid in the vertical section drawing. However, it also shows the whole manufacturing process of one car.
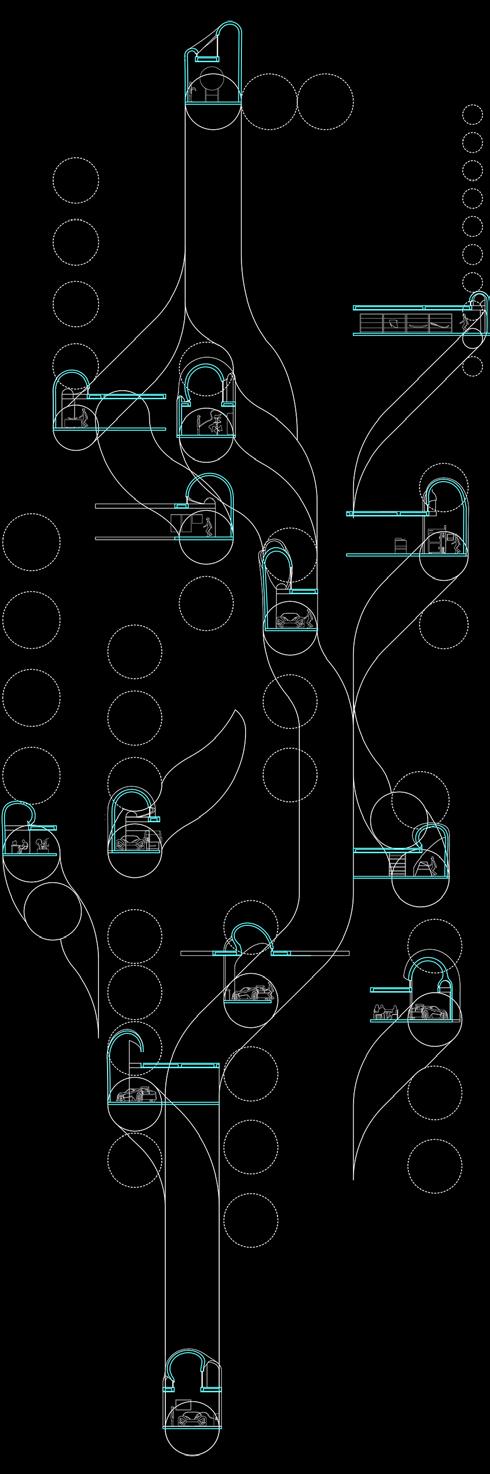
ABSTRACT MOVEMENT AND STILLNESS & LEADING TO SECTION
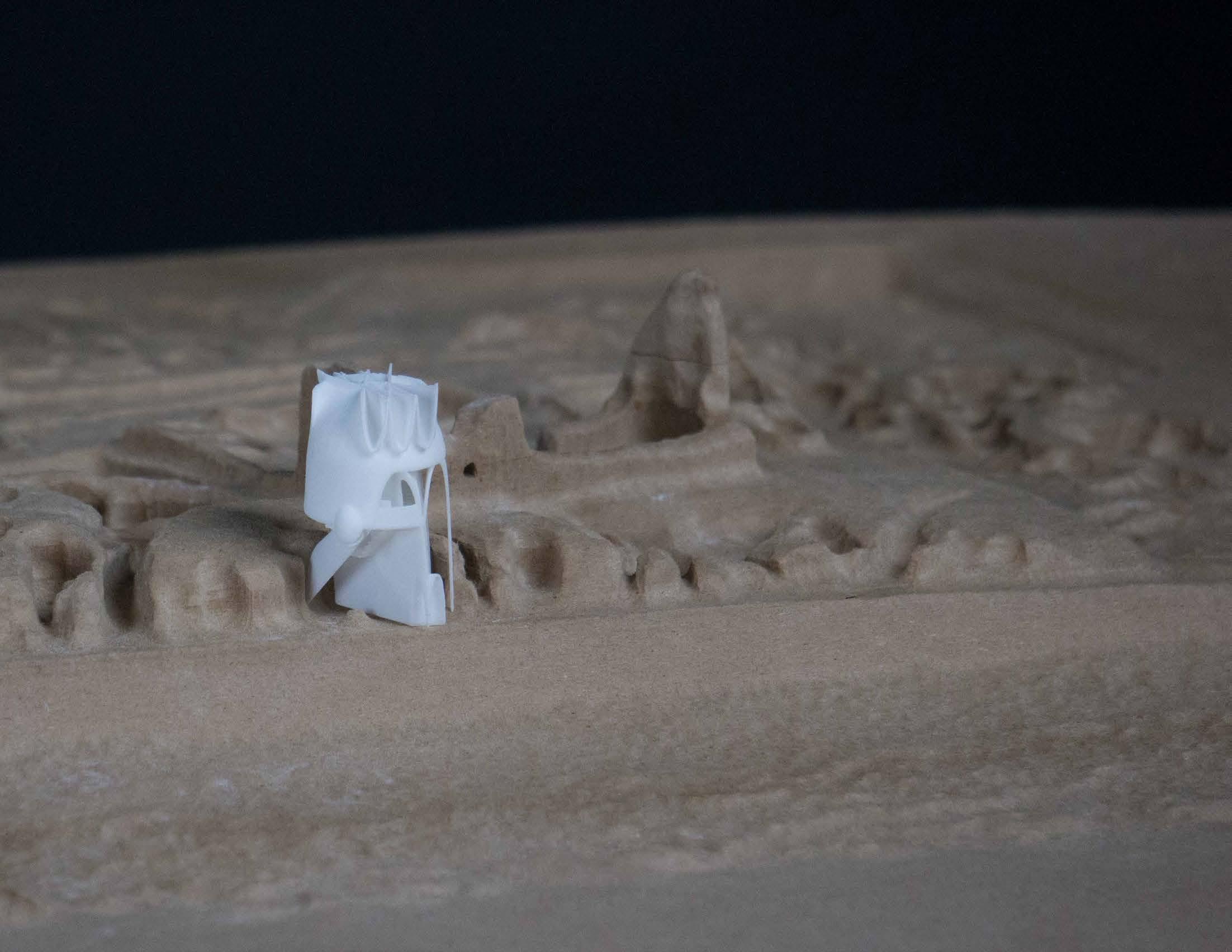
Rhizomatic Drawing & CNC Milling
ACADEMIC, Individual work
Rhizomatic Mapping Workshop,2020
Supervisor: Robert Brandt Trempe Jr (Email: rbt@aarch.dk Tel:+45 8936 0232)
|Rhizomatic System| A Rhizomatic Drawing from Reading
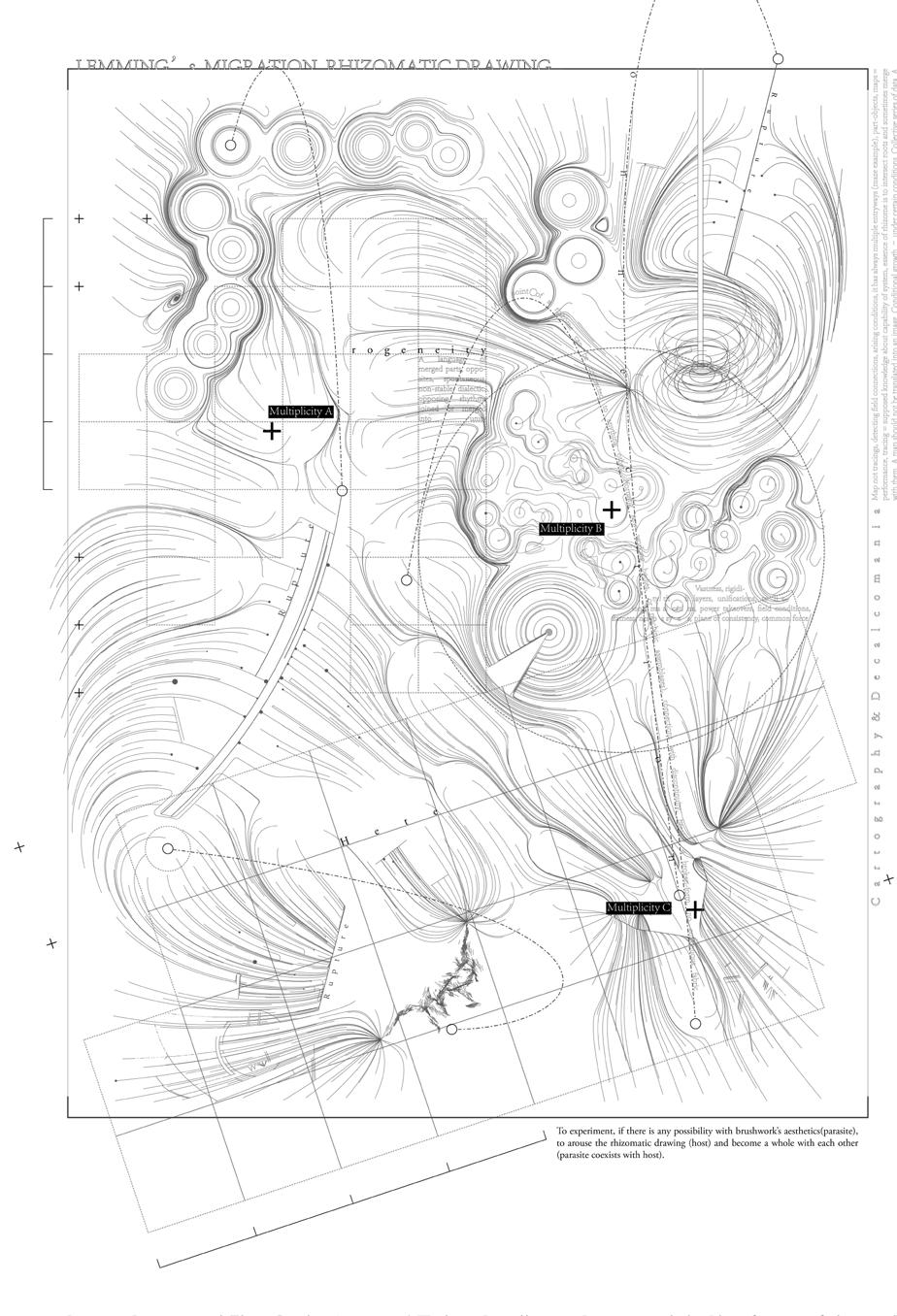
A periodical migration of lemmings is an typical example of how the balance of nature is maintained within an animal population. The normal periods. Small migration in searching food and shelter. Once a suitable area is found, the lemmings settled down and do two things necessary for survival. The first is eating. Lemmings subsists on the roots and shoots of plants. The second thing lemmings do is reproduce. The second thing lemmings do is reproduce.
As more and more individuals are born, food and water supply begin to diminish. Every three to four years, some populations in localities go to great density. In response to this overcrowding, lemmings exist a very specialized behaviour, Individual begins to migrate away from the centre of the dense population. They group together and move in detectible ways across the countryside. If a stream or river interrupts their path, they swim across. Many die during migration, starvation
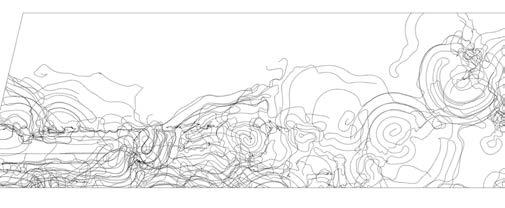
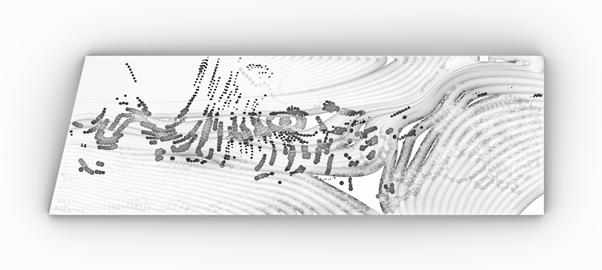
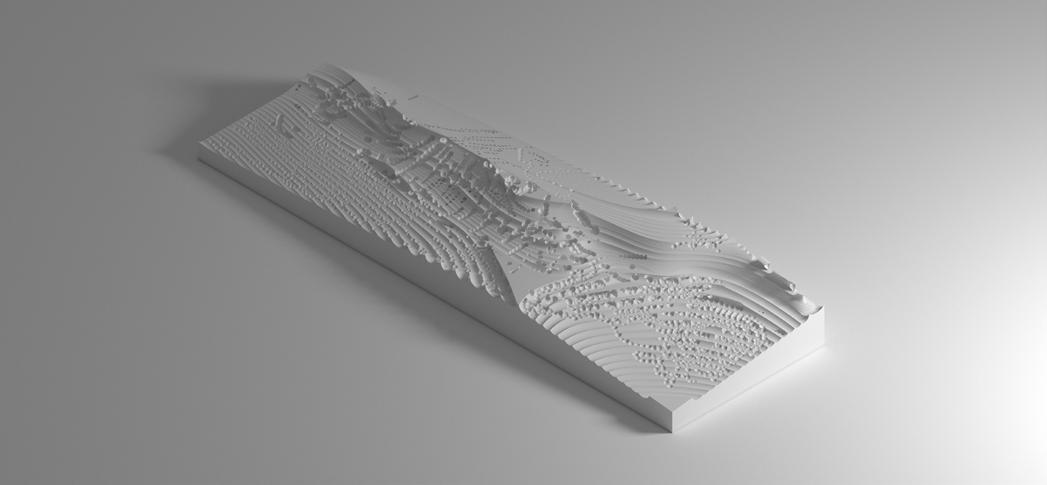
The same way was also used for the mapping of Hamberg Habour. A series of the parametric drawing represent the human, vehicle, and water streamline respectively. All the drawings are generated by grasshopper. All the drawings were overlapped together to show the density and interaction of three aspects. The density and the intersection would be perceived by the integration drawing. Then, all the lines in the drawing were separated into numerable dots. They symbolized each movement of the nozzle for CNC milling. The white model has been shown above.
B-6
1 2 5
Vege Tracing & Strategy
ACADEMIC, Group Work
Super Informal Mapping Workshop
Supervisor: Jason, Ho (Ph.D. in RMIT) 8256475121@123.com
Partner:Ting Zhang, Tian Liu, Wenhan Dong, Zhiheng Jiao, Liang Zhao, Zhiqiang Ma
Role: Investigation (20%), Analysis (20%), Visualization (30%), Curation (30%)

We selected the veges as the tracking object , and found a network of people, hawkers, villagers, cleaners, and university canteens according to a series of economic and social activities We even act as a picker to explore the psychology of the characters and the logic of behavior with different class figures. A series of spatial strategies are obtained by counting the capacity, storage points, flow points, and flow paths of the veges. An organic recycling strategies is encouraged here.
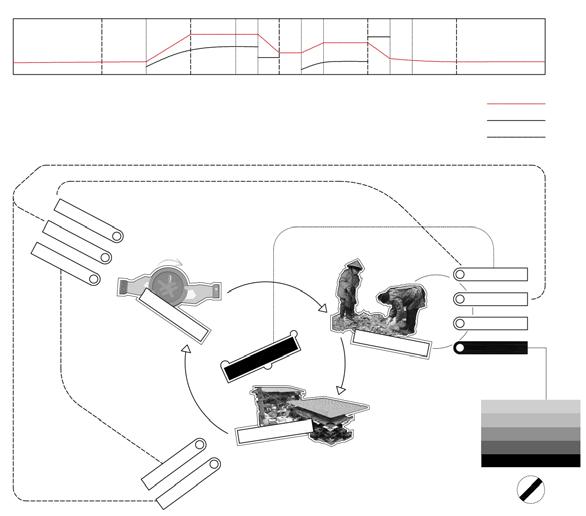

cabbage baby cabbage Breakfast Retailer Main Entrance The scallion cake in this retail is super delicious.I should eat enough to work hard. Two big piles of vegetables here. There will be a lot of gains!* ^_^* The owner of this vegetable shop will exchange the leaves with the merchants next to it, so there is no leaf for us. The owner is very nice. She takes of the vegetables as feed for chicken. But if you need, they also give you some. Fixed Vendor Vegetable Lettuce / Cabbage Herearetheleaves Mobile vendors are very kind. You can also get some from them. Parsley / Spinach /Celery Clean Time Picking up vegetables should before cleaning time. This is the shortest and most convinient route for picking up. Here you can find the fish that feed the chicken. Cleaner Mobile Vendor Fishmonger Fish viscera If you meet the same one who pick up leaf, you can talk to him and maybe you will be friends. have more vegetable leaves here. You also come to the leek leaves. TOOL GUIDE Plastic bag Pliers Gloves Best Time 8:30-11:30 Guideline for Picking Up Vegetable leaves | in Ma-Lao-Wei Market | Please Note that: The Collage is done by Jiahong and me. Guideline Collage is done by Tian Liu and words are written by me.
organic cycle inorganic cycle VEGE Social relation Transaction Space strategy villager restaurant college forfree mediatelowpriceprice differentiate lead to generate cleaner infrontbehind 24h Vege quantity Picker time
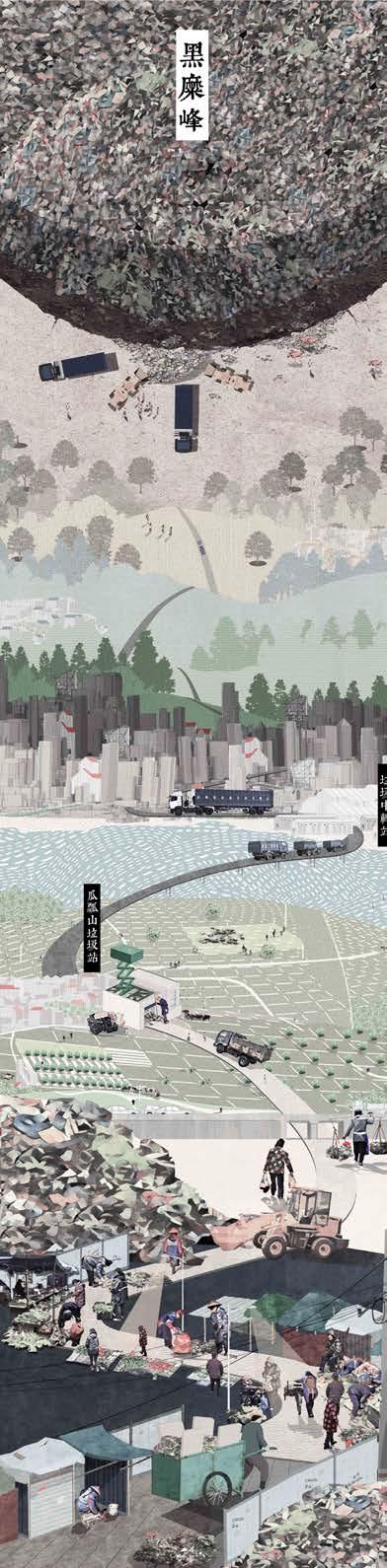
ALL-IN- ONE (AI House)
ACADEMIC, Group Work [2018]
Shinkenchiku Residential Design Competition
Partner: Zhiqiang Ma, Zhaoxin Yu, Jiahong Lin, Zhiheng Jiao
Role:Conceptual Design (30%), Physical Modeling (20%), Visualization (20%)
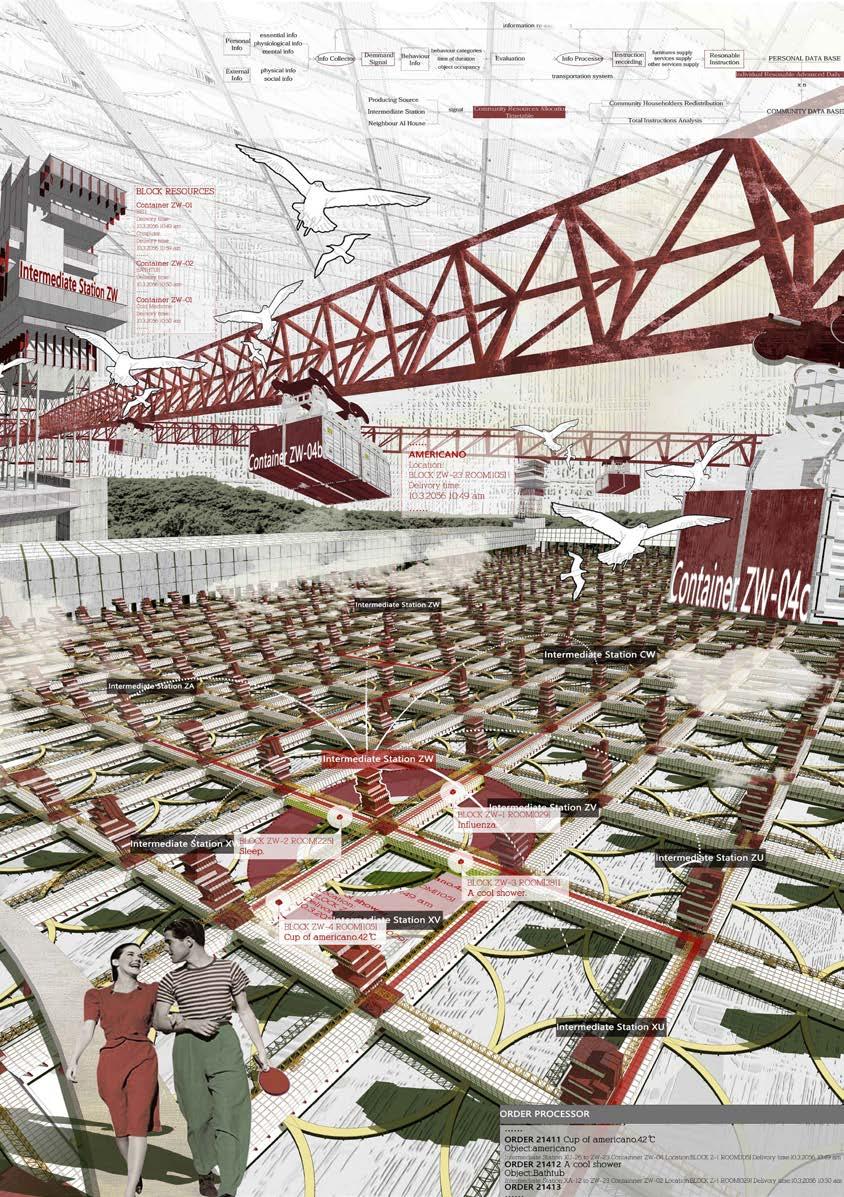
The way occupants perceive homes depends on the people's bevavior in their homes. Each behavior has an impact on a person's physiological and mental state, which affects the subsequent life. Therefore, we designed an AI system to gradually generate a most reasonable demand, behavior, and service matching result to gradually generate a most reasonable demand, behavior, and service matching result through data collection and deep learning on these figures. First, the system collects the physical personal information and the external factors in our society at the same time. And then it records the people's needs and behaviors in this statement, comparing and evaluating the state before and after. Finally the inductor senses the signals sent by the body or quota's change to provide the most appropriate service.
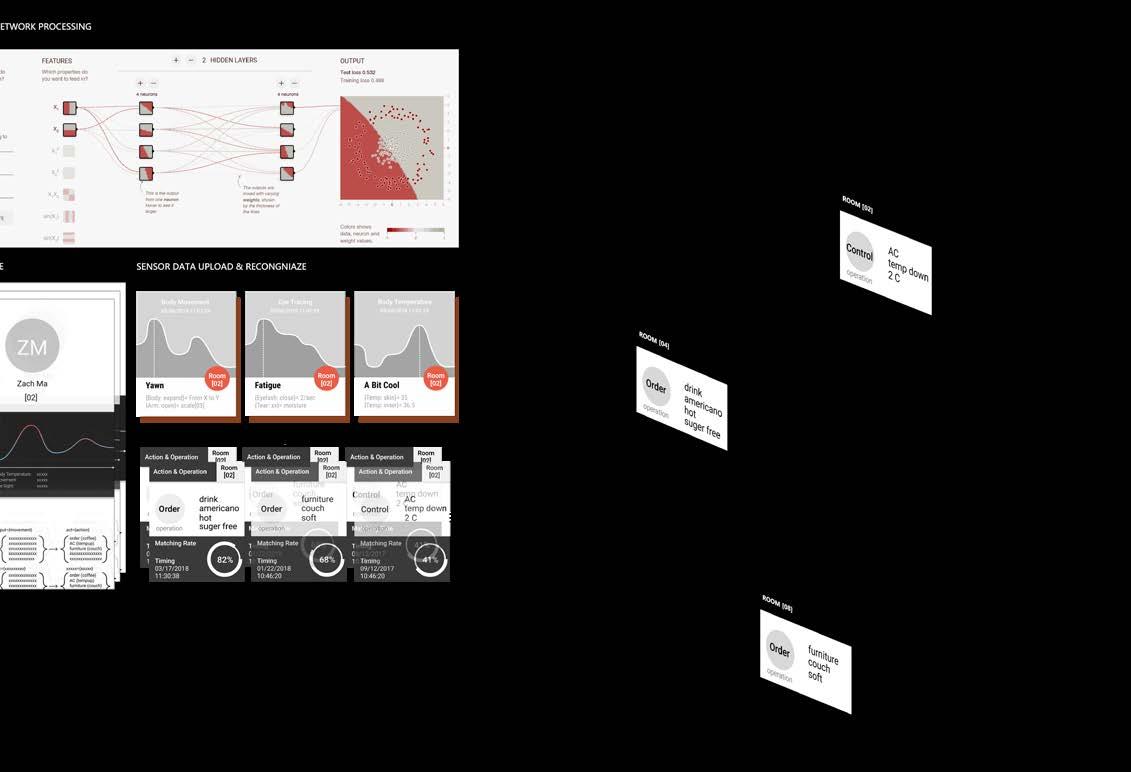
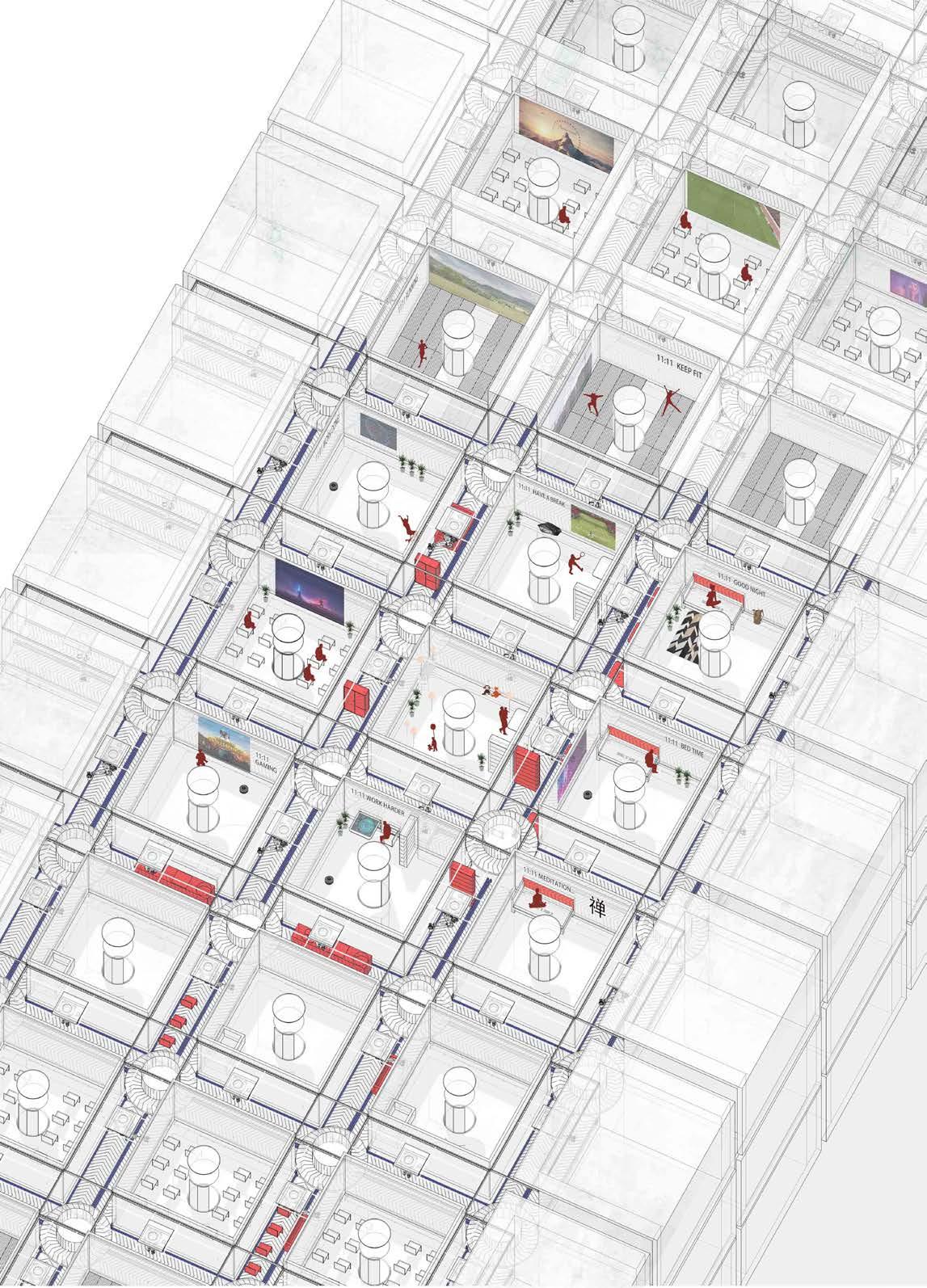
Please Note that: Data analysis diagram are done by Zhiheng Jiao and me. Axonometric Drawing is done by Zhiqiang Ma. The collage is done by Jiahong and me.. B-7
Residential Area Planning
ACADEMIC, Individual Work 2016, [Undergraduated Graduation Design, 3th year]
Residential Area Design
Supervisor: Xie Fei (Email: fei_soarch@hnu.edu.cn Tel:00-86-0731-88822679)
Site: Changsha, China | Residential Area
This is a residential area planning and design project located in Yuelu District, Changsha City. It involves road planning, housing planning, plot ratio (FAR) consideration, landscaping design, node design, and fire lane design.
Curculation / Transportation / Regional

Function and Streamline Analysis

landscape design

Block Design

{A-7}
{A-5}Creative Market
-Urban Village
ACADEMIC, Group Work 2017, [Undergraduated Graduation Design, 4th year]
Renovation of Urban Village Supervisor: Xie Fei (Email: fei_soarch@hnu.edu.cn Tel:00-86-073188822679)
Site: Changsha, China | Urban Design
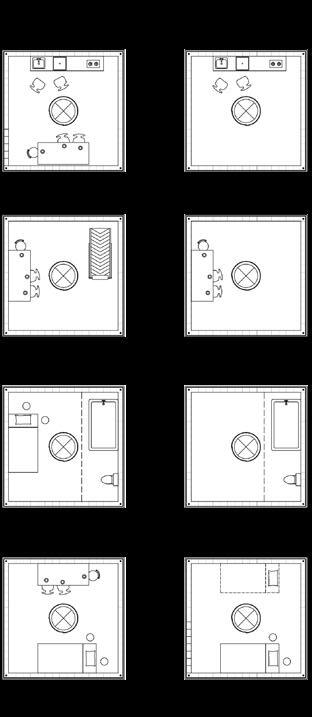
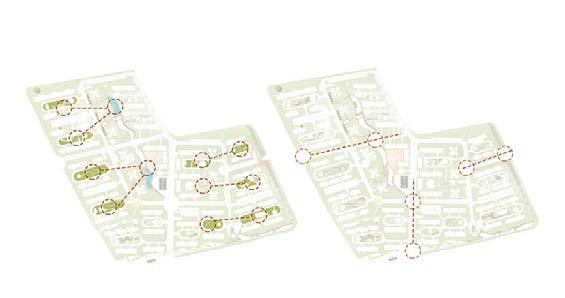
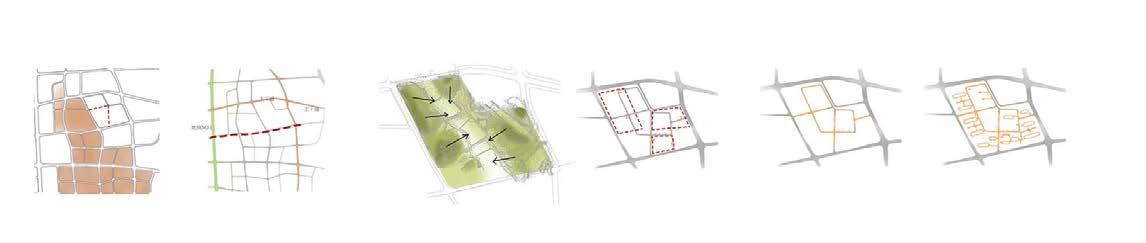
In this project, we analyzed the complex housing spaces, economic activities, and daily activity timelines of the original site's residents. We introduced a creative market to activate this area from three perspectives. Our renovation strategy included flexible street design, node design, green space organization, and the introduction of installations.
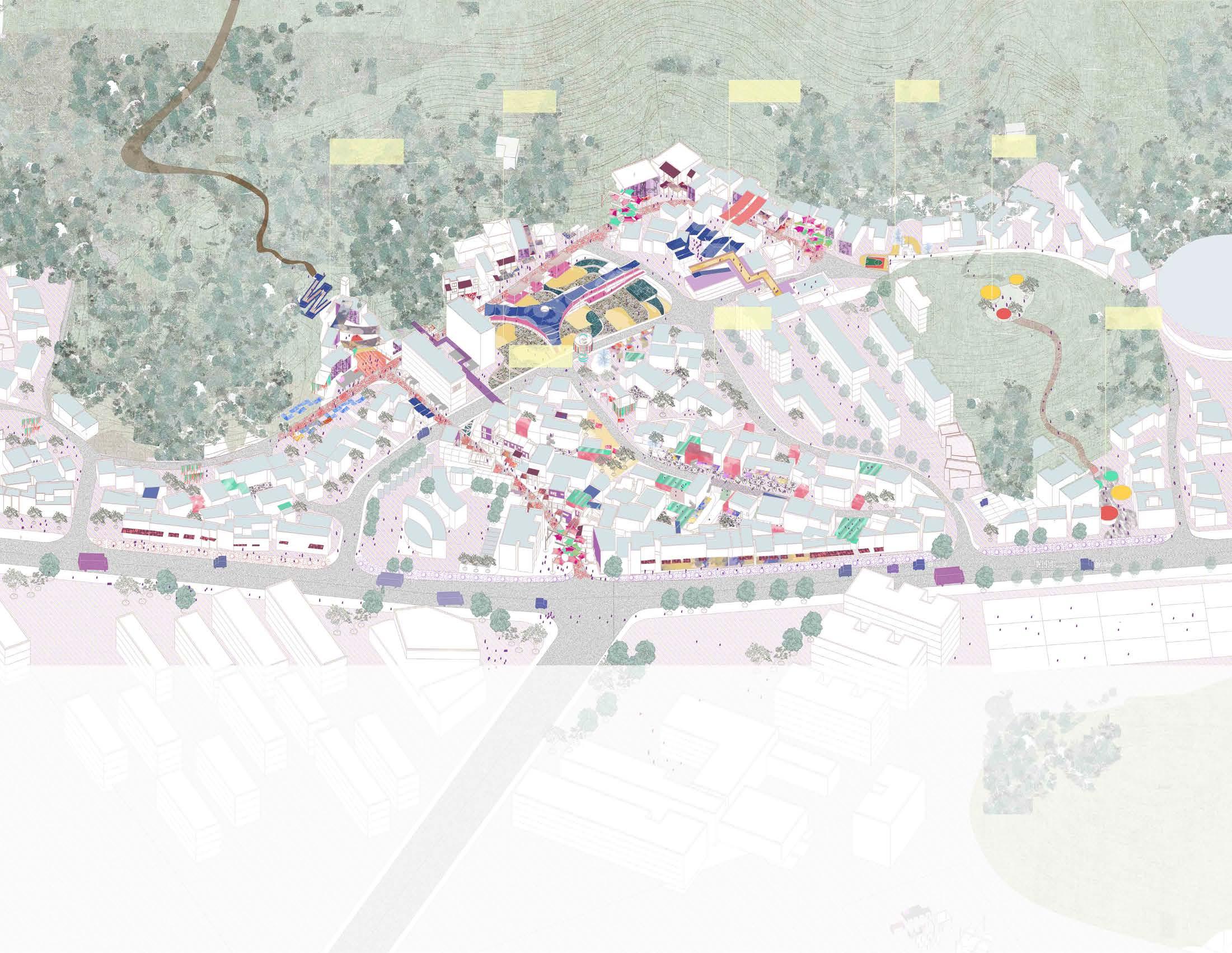
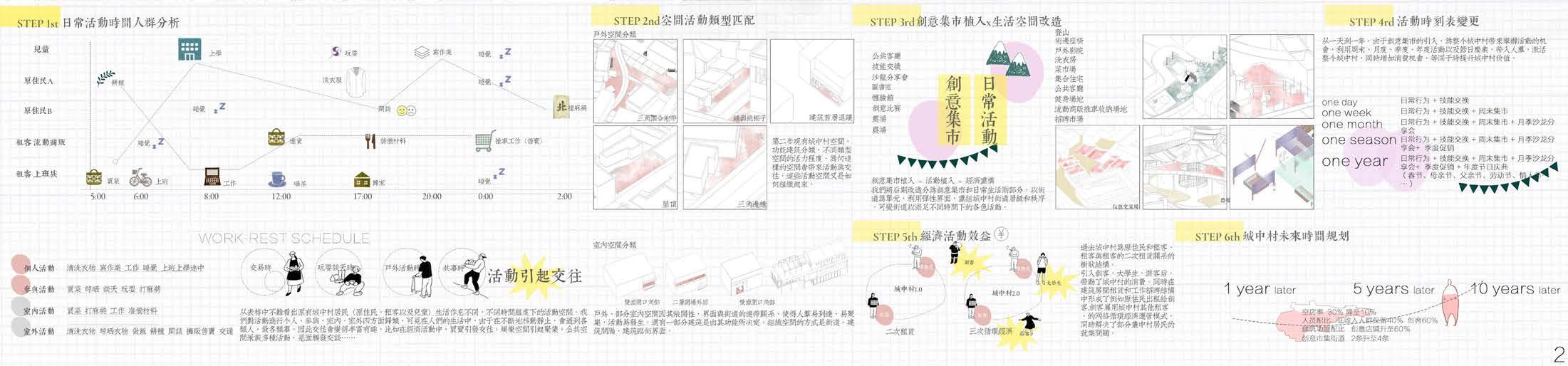
Daily Activity Time and People Analysis Spatial Activity Type Analysis Creative Market Integration and Living Space Renovation Activity Schedule Updated Economic activity efficiency The future planning of urban villages Yuelu Mountain Hiking Entrance Elevated Plaza Information Exchange Excercising Creative Market Integration Residential Housing Area Mountaineering Sidewalk seating Outdoor cinema Laundromat Vegetable market Collective housing Public living room Gymnasium site Mobile vendors Job fair From one day to a year, the introduction of a creative market provides opportunities for events throughout the urban village, utilizing weekends, monthly, quarterly, and annual events as well as festival celebrations. Previously, the urban village was characterized by a hierarchical structure of relationships among indigenous residents, tenants, and subleases between tenants. With the introduction of makers, university students, and tourists, there has been boost in consumption within the urban village. At the same time, a networked circular economic model has emerged within the architectural room rental and job recruitment structure, where indigenous residents rent out to makers, who in turn employ other tenants from the urban village. This model has also addressed employment issues for some residents of the urban village. Implanting a creative market equals embedding activities equals economic restructuring. We will transform the later stages into two parts: a creative market and daily life, using the street as a unit and employing flexible interfaces to reorganize the hierarchy and order of urban village streets. Variable streets will accommodate diverse activities at different times. From the table, it's evident that the original residents of the urban village (indigenous people, tenants, and children) have different daily routines and activities at various times. We categorize these activities into four aspects: individual, participatory, indoor, and outdoor. It's clear that in people's lives, because of the constant presence of a static building, various activities and interactions occur. As a result, interactions become rich and diverse. For example, in economic activities, buying and selling spark interactions; entertainment spaces attract gatherings; public spaces host multiple activities; and encounters initiate conversations. Outdoor and certain indoor spaces, due to their openness and the connection between interfaces and streets, make it easy for people to reach and gather, facilitating the occurrence of activities. Additionally, the function of some buildings also plays a crucial role. The organization of space is characterized by streets, spacing between buildings, and the interfaces of buildings facing the street. Urban Village 1.0 Urban Village 2.0 The second step involves classifying the existing urban village spaces and functional buildings, assessing the vibrancy levels of different types of spaces, understanding why such spaces facilitate activities and interactions, and exploring how these activities are organized. Chindren Indigenous resident A Indigenous resident B Tenant mobile vendors Tenant office workers Cultivation Education Sleep Sleep Commuting Working Tea Go Home Grocery Doing laundry Play Play Talking Homework Public living room Skill exchange Salon sharing sessions Library Experience museum Creative Stocking materials Cart work (selling) Stocking up Doing laundry Homework Working Sleeping Commuting Grocery Drying Talking Playing Grocery Playing Working Preparing stuff Cleaning Drying Cooking Cultivation Talk Retailing Transport
Fitness and Entertainment
Yuelu Mountain Hiking Entrance

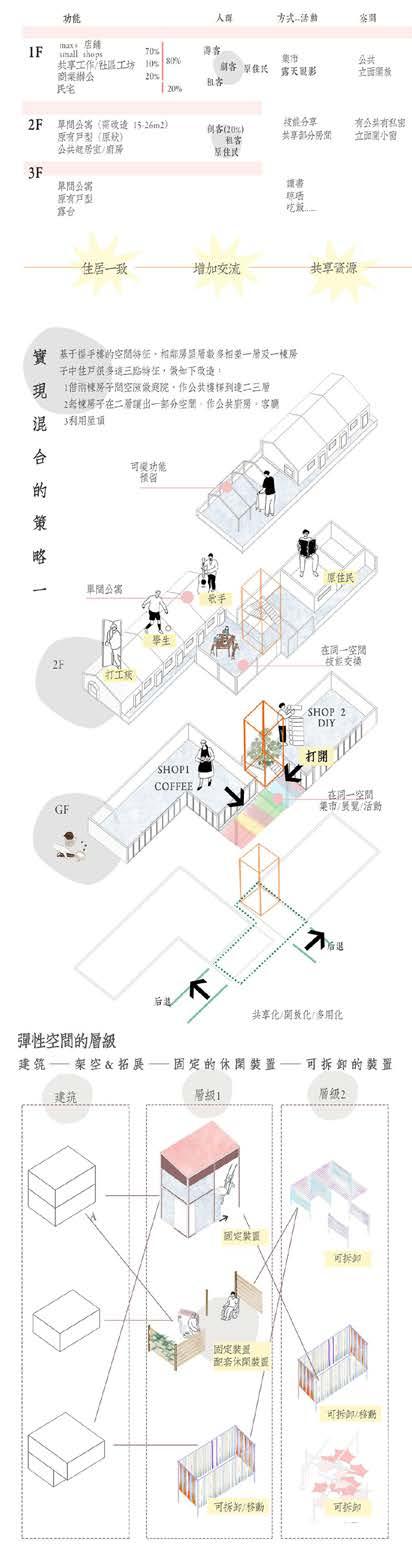

FLEXIBLE SPACE HIERACHY

HYBRID STATE
INSTALLATIONS
STRATEGY 1
The device takes 3*3 meter area as magic, with the framework made of bamboo poles tied together with ropes for easy disassembly, creating a flexible street. It is covered with colorful fabric and ribbons, serving to beautify the street facade. Based on the spatial characteristics of handshake buildings, the difference in the number of floors between adjacent houses being often just one, and the presence of many households within a single building, the renovation is as follows: 1. Utilize the gap between two houses to create courtyard, serving as a public staircase connecting the second and third floors. 2. Allocate a portion of space on the second floor of each house for a common kitchen and living room. 3. Make use of the rooftop. FLEXIBLE SPACE HIERACHY Rest and drying space Rest and public space Children playground MARKET ACTIVITY Studio apartment original layout balcony Rest and drying space Studio apartment (needs renovation) Original layout (as is) Common living room/ Max+ shops Small shops Co-working/community workshops Commercial office guest Indigenous people Tenants Makers Makers(20%) Tenants Indigenous Market Open-air Public Facade open Skill sharing Public shared rooms Has public areas Has private spaces Windows are small and open Reserved for flexible functions Studio apartment Skill exchange in the same space in the same space market/exhibit/activity Open worker student singer singer architecture Elevated & expanded Fixed leisure installations Detachable installations
ARCHITECTURE DRAWING
"Drawing Investigations - on how drawings become a spontaneous, conscious procedure for constructing architecture."
ACADEMIC, Individual Work 2021
Supervisor: Claudia Carbone
(Email:cc@aarch.dk Tel:0045 8936 0305)
Drawings are ceaseless thinking instruments while constructing architecture. Drawings are intervened and aroused by subconsciously-manual-fluidity and consciously-cerebralinstruction. Through translations of famous Chinese writing, the project aims to capture characteristic architectural moments, found and expressed in the text, to work with tools like pencil and mouse, in digital and/or analogue projection. Furthermore, in iterations to work to unfold of ideas, structures, relationships etc. inherent in the text.
Final result pointed out a Zhuangzi Monument with four parts:
1.Infinite Relativity Park,
2.Wall-Doorway-Window Exhibition Hall - Architecture
3.Human Library
4.Lush Garden
I selected three typical drawings as the end of my portfolio, which symbolize my present thought about Architecture, and my great willing of architecture drawing exploration in the future.
If you need more information about this project, please feel free to contact with me.
C-1
ACHITECTURE DRAWING: Zhuangzi Monument
Infinite Relativity Park
This drawing shows the first part of Zhuangzi Qiushui Memorial Hall - Infinite Relativity Park. It is the process of translating the hand-painted translation of Qiushui’s first three questions to digital painting and architectural space. This architectural drawing emphasizes three elements, infinity, the relativity of big and small, and the indisputable correspondence.
(This drawing was drawn by rhino and PS.)
C-2 ACHITECTURE DRAWING Zhuangzi Monument
Concentrated version by segments of each part
The four parts of the Zhuangzi Qiushui Memorial Hall (infinite relativity park, wall and door profit and loss exhibition hall, human library, and lush garden) are extracted from each part to form a condensed version of a monumental building with implied philosophies. Architectural painting uses a vertical axonometric perspective, and its mirror and ground reflections, to present an architectural fantasy. (This drawing was drawn by rhino,PS and pencil.)
It
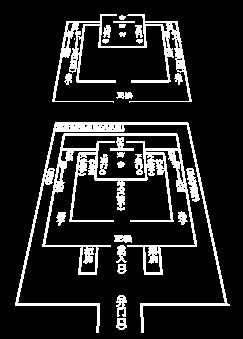
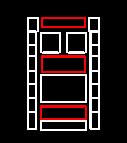
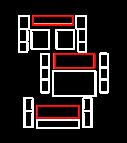
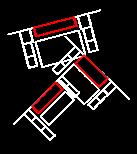
C-1 ACHITECTURE DRAWING : Zhuangzi Monument Wall-Doorway-Window Exhibition Hall - Architecture
elevation
the information.
is a space drawing interpreted from Zhuangzi philosophy. The succession of increase and decrease of the space are shaped by the wax and wane of three architectural elements-wall, door, window. Wall, door, window, the most basic architectural elements, they could make a fantastic and complicated world by changing various outlines and compositions. In this drawing, plan and
are combined into one to convey all
(This drawing was drawn by rhino and PS.)
