“Flow along the corridor”
A GAN-based floor plan generator





















+ FACULTY: Oana Taut + STUDENT: Ziqi Cuit Final Thesist
Intro Case Study
Research Objective
Methodology
Dataset Generation
Training
Conclusion
“Content”
Abstract
Generative design has always been a very hot topic in recent times. Over the past few years, machine learning tools have emerged as invaluable aids in the creation of more precise and diverse 2D or 3D building models, fostering greater user engagement in the design process. A retrospective examination of previous approaches shows that techniques such as diffusion models, generative adversarial networks (GAN), graph neural networks (GNN) and etc. They all attempt to educate computer to understand the complexity of a building and reconstruct it.
This research will continue this topic and try to develop another method to let the ML understand, learn and reconstruct the information in the building plan to develop a generator. The training results allow users to customize the generation. In addition, it relies on the necessary circulation lines in the building (ie, corridor space) to generate a reasonable building plan. After verifying the possibility of this methodology, this study propose a feasible solution for subsequent generation of architectural 3D space.
Key words:generative design, Pix2Pix model, spatial relationship, Graph theory.
ML
INTRO
how to understand spatial information?
Case Study
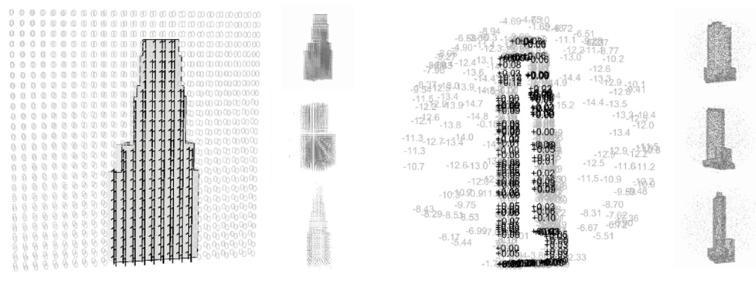
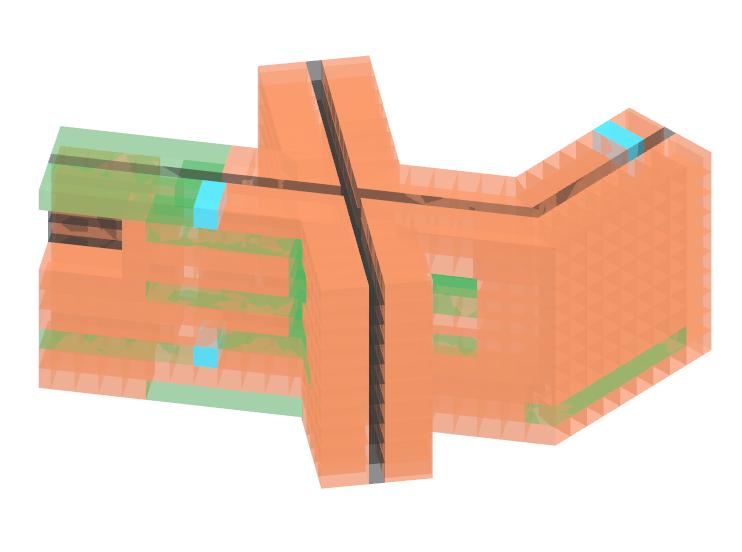
1, 3D GAN_Voxel based: Synthesis and generation for 3D architecture volume with generative modeling


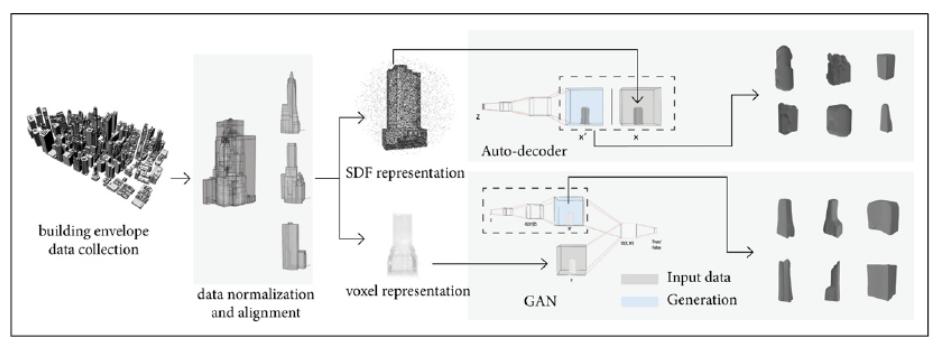
User input: /
Scope of application: building geometry
Training model:3D GAN
Dimension: 3D
Limitation: Generate results with low resolution, can only simply learn the shape characteristics of buildings.
Case Study
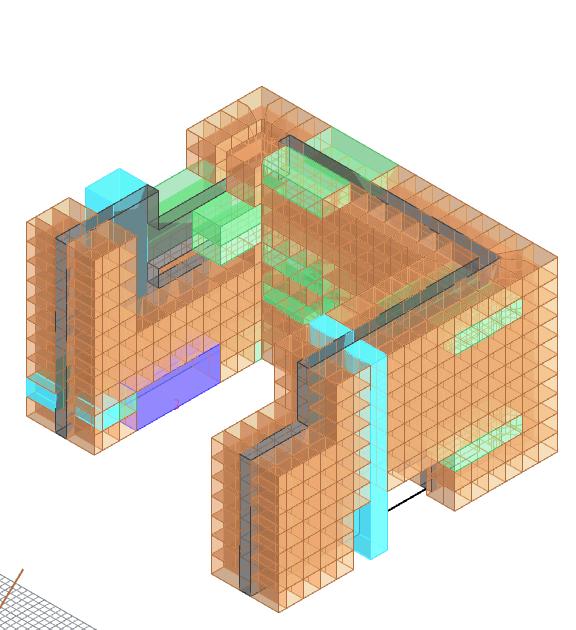
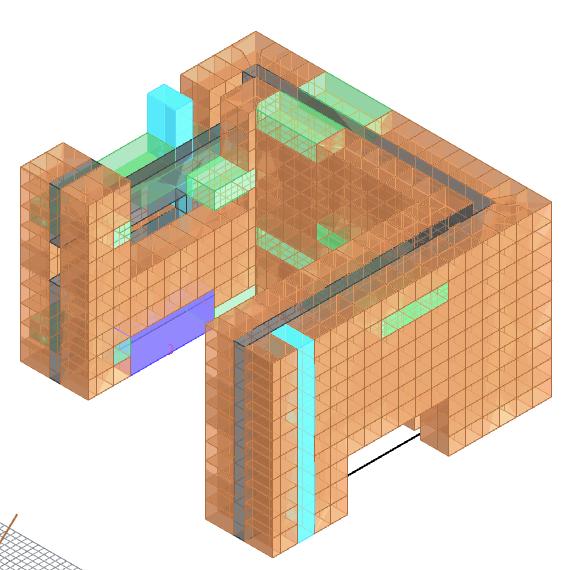
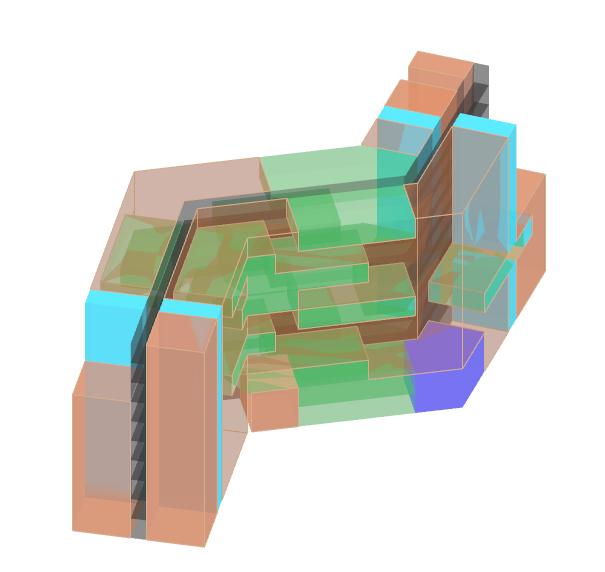
2, Graph based: Building GAN
User input: function, graph
Scope of application: single apartment
Training model:GNN+pointer-based cross-modal modules
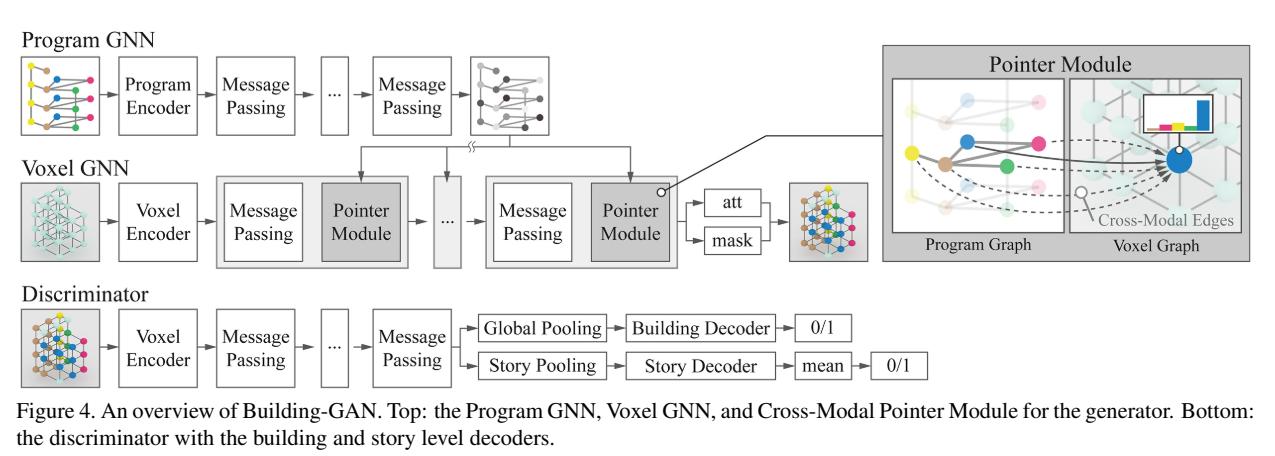

Dimension: 3D
Advantage: can generate public building with internal spatial divisions.
Case Study
3, 2D GAN: ArchiGan
User input: boundary
Scope of application: single apartment
Training model:cGAN (pix2pix)
Dimension: 2D
Limitations: Generate pixel-result non-vector images


Case Study
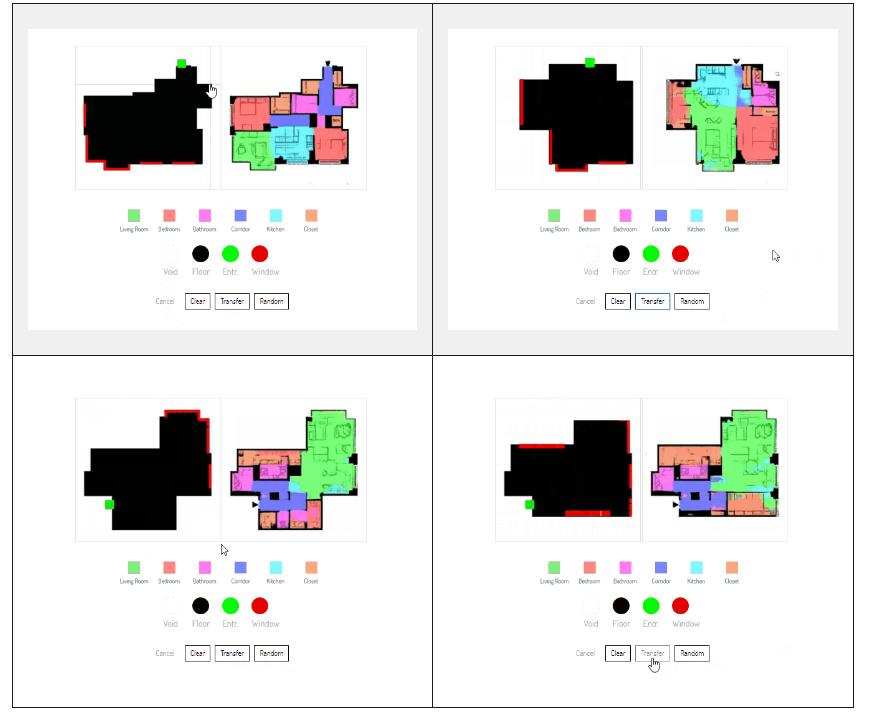
4, GNN+GAN: Graph2plan
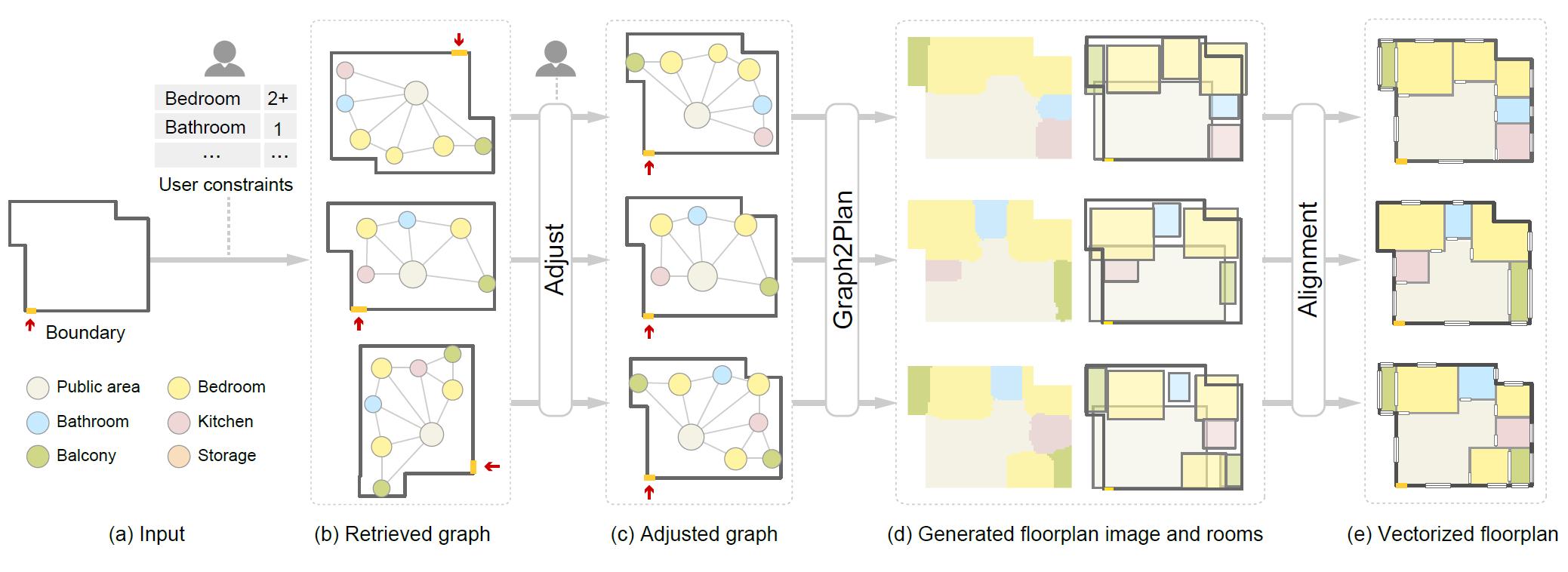
User input: entrance, relation of rooms, boundary, selected room function.
Scope of application:single apartment
Training model:GNN+GAN
Dimension: 2D
Advantage: Allows users to generate interactively, increasing the controllability of generated results.
Literature Review_3D generation
Agenerative architecturaland urbandesignmethod throughartificial neuralnetworks
Synthesisand generationfor3D architecturevolume withgenerative modeling

Buildingmassing generation usingGANtrainedon Dutch
3Dcitymodels
UrbanLayout WorkflowUtilizing
Generative AdversarialNetwork (GAN)

Building-GAN
Encodedpoints andsurfaces
GNN+pointer-based cross-modalmodules
surrounding
voidspace
withdifferent information
3Durbanblock model

Voxelbuilding modelwithinternal spatialdivisions
singlepublicbuilding withinternalspatial divisions
<p> </p> Title Method Traininginput Scopeofapplication Output
ANN Vector Output format
high-risebuilding
volume pointsandUV surfacemodel
2DGAN Vector
blockvolume
layersofimage
Voxel 3DGAN voxelmatrix
high-risebuilding volume
Voxel
Figure 3Dvoxelmodel
graph
buildingvolume 2DGAN Voxel block
newbuildingsinthe
Literature Review_2D generation
boundary bothsingleandlarge apartment roomconfigurationwith detailedfurniture
Architecturallayout designthroughdeep learningandagentbasedmodeling:A hybridapproach

Pix2Pix+cGAN boundary/room relationship/roomarea

House-GAN++ GANs+ Convolutional message passing
roomrelationship
roomconfiguration
boundary/room relationship/room location
HouseDiffusion roomrelationship
usionModel
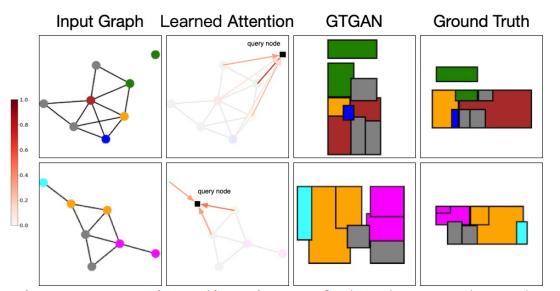
Graph-Constrained HouseGeneration graphTransfor mer roomrelationship
Pix2pix corridorline/room area/room relationship(optional)
roomconfigurationwith doorposition
roomconfigurationwith doorposition roomconfigurationwith doorandwindow position roomconfiguration
bothsingleapartment andpublicbuildings
<p> </p> Title Method Userinput Scopeofapplication Output
Raster Outputformat
ArchiGAN Pix2Pix
singleapartment Graph2plan
Vector singleapartment
Ourwork
Vector
Vector
GNN+GAN
GAN singleapartment singleapartment Vector
Raster
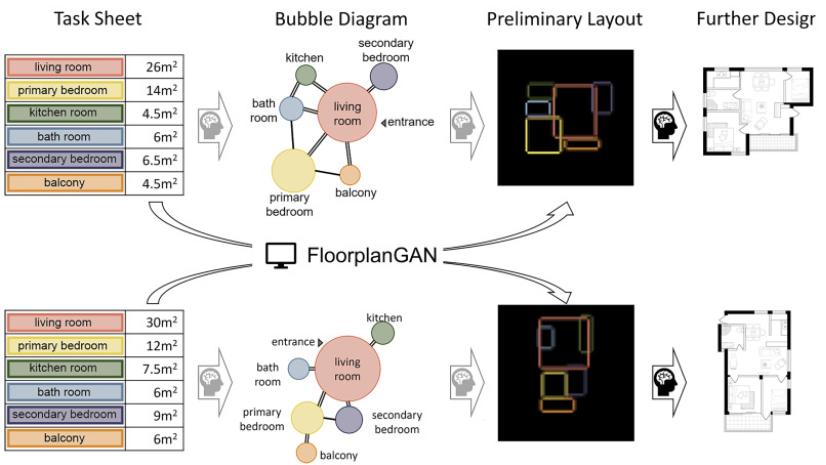
floorplanGAN
roomfunction/area
Vector
singleapartment
Figure
roomconfiguration
singleapartment Vector roomconfiguration
Research Objective
Initial idea/ Spatial feature/ Limitation/ Ideal outcome
Research Objective
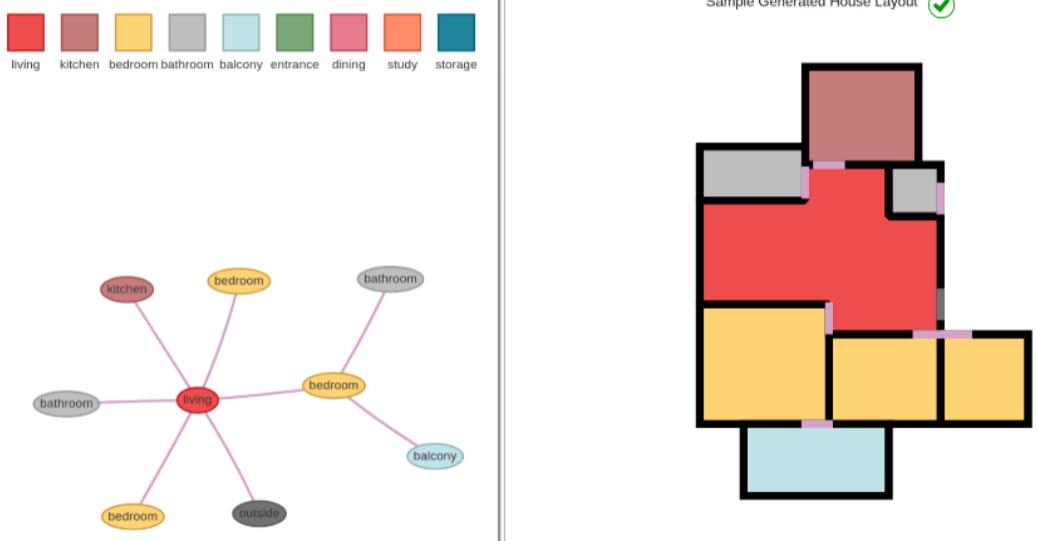
Most of the previous research started from the relationship between architectural spaces and reconstructed a plane by letting the user decide some basic information of the room, such as function, area, and adjacent relationship between rooms. For the single apartment building plane, this condition enough to produce good results.

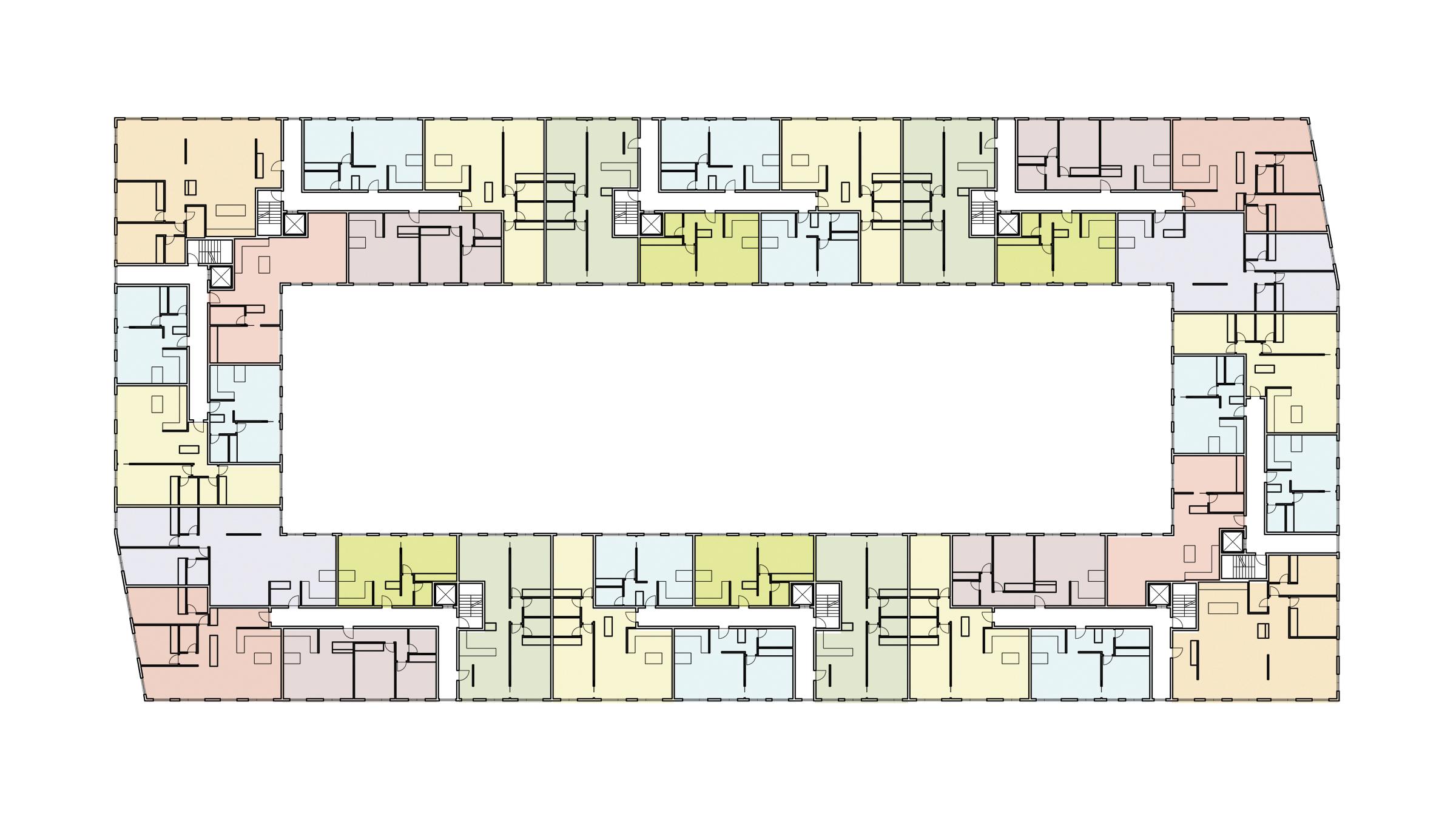
However, for other building types such as museums, shopping malls, hospitals, etc., traffic circulation is an important element that runs through the space. This study attempts to introduce another condition on the basis of satisfying the basic constraints, focusing on the close relationship between the building plane and its traffic space.
Comparison with previous studies, this research will solve this :
1, This research attempts to find a more precise method to capture building features and learn from it.
(both applies to 2d and 3d)
2, not only single apartment, but also explore the possibility to generate public buildings.

3, In addition to meeting the basic conditions for rational building generation, this study will also introduce ‘circulation’, which is an important element of public buildings.

Public building's configuration follow with their circulation











First propose
room geometry

Adjacency Matrix: a matrix with rows and columns labeled by graph vertices, with a 1 or 0 in position according to whether and. are adjacent or not.



Can we use different matrix to reprsent some information?

rooms relationship between each other
room function/area
Distance matrix Adjacency matrix + +
? matrix
Initial workflow
UserInput
1.Drawa referencelineforcorridor.

2.Definethe grossfloorarea(sqm)
3.Definethe entrancelocation
4.Inputthe occupancyratioofdifferentfunctions
5.Inputseed:trydifferentexteriorvolumes



DatasetgenerationinGH





GHGeneration
Distancematrix Labelmatrix Adjacencymatrix Pix2pixModel Predictionimage Inputdataset Groundtruth Adjacencymatrix Distancematrix Labelmatrix
Function
Limitation
But when I start dataset and training , there is some problems:
Lack of real 3D building datasets
Due to the pixel limit of the pix2pix model, it cannot handle large public buildings with more than 512 feature points.
Considering that the standard floor plan of a public building can represent the layout of the entire building in general. Therefore, this research will first start with the generation of 2D floor plans, verify the possibility of this methodology, and propose a feasible solution for subsequent generation of architectural 3D space.
What's the outcome?
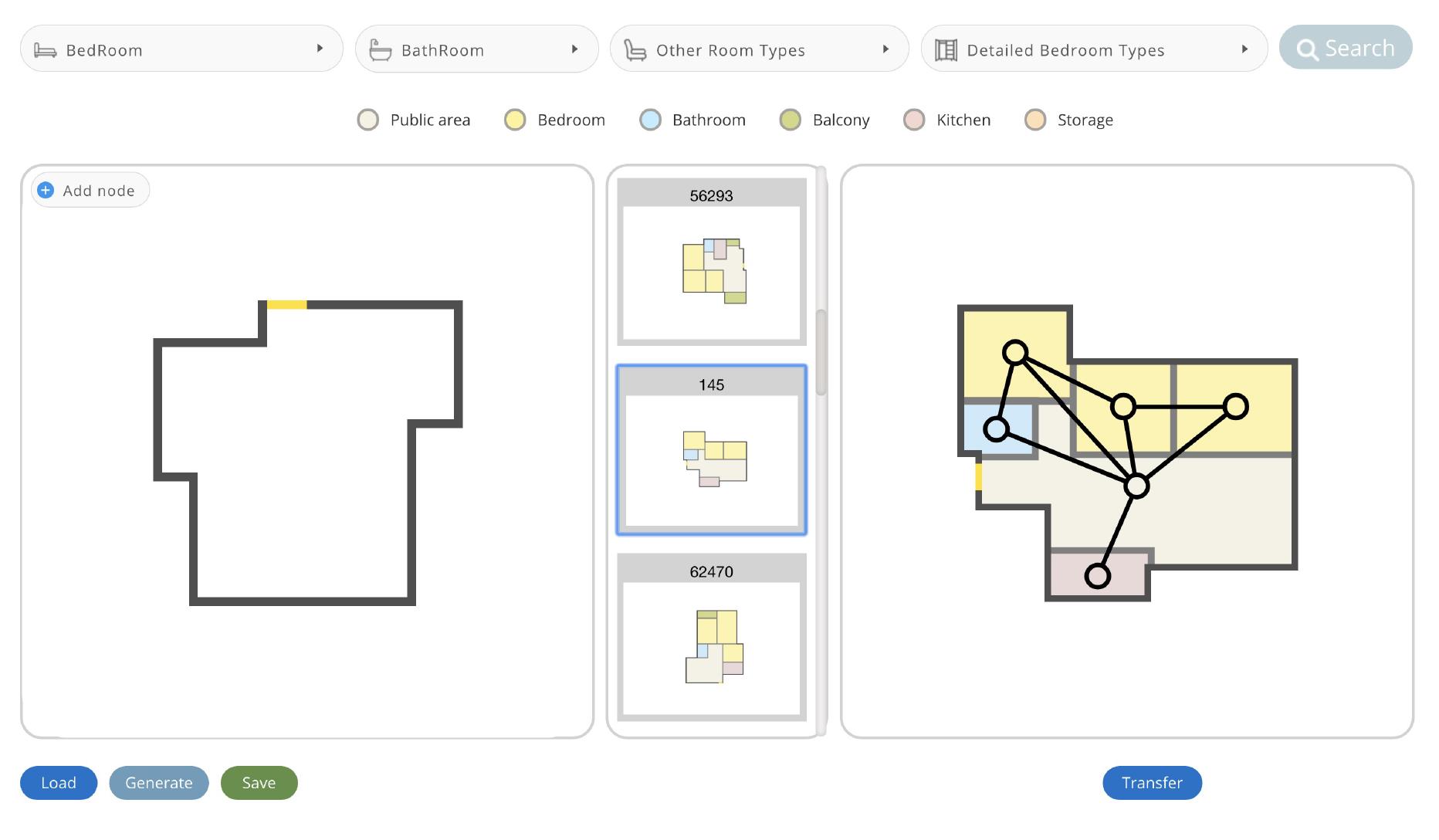
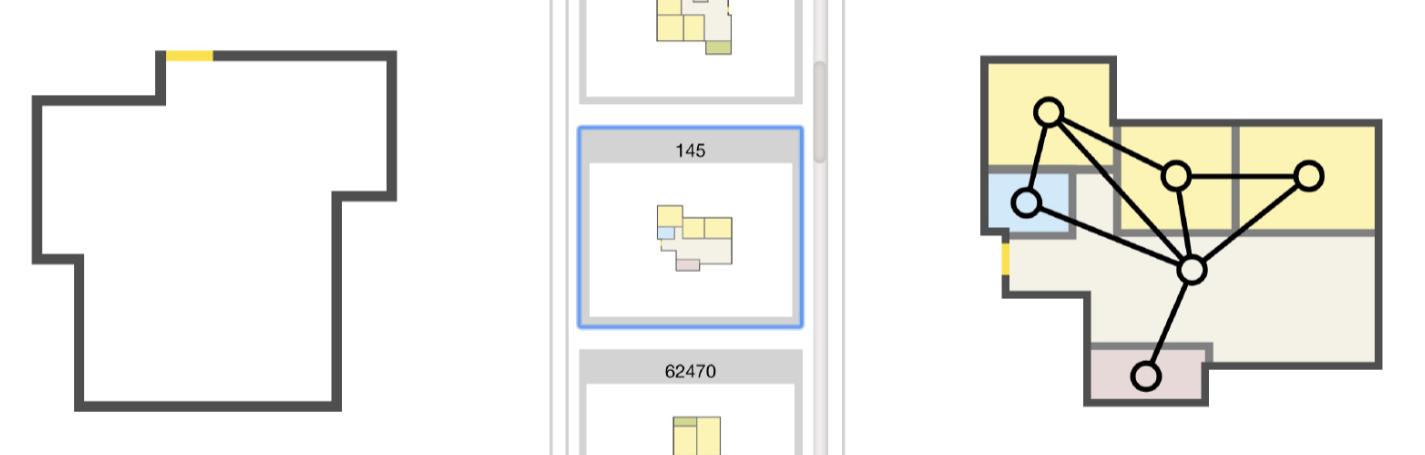
A plan generator that flows with the corridor


user input(constrains) expected outcome
1. Draw a reference line for corridor

2. Define the function and area you want
room01: 28sqm
room02: 7sqm
room03: 13sqm
room04: 18sqm
room05: 16sqm
room06: 14sqm
3. Define the relation of these rooms if you need
Plan configuration result
?
Methodology
Pix2pix model/ Workflow
Methodology_pix2pix model
2D GAN, unsupervised learning, allows learning of adjacency matrix images. pairs of data, with clear output and input, allowing the establishment of a connection between constraint and outcome.

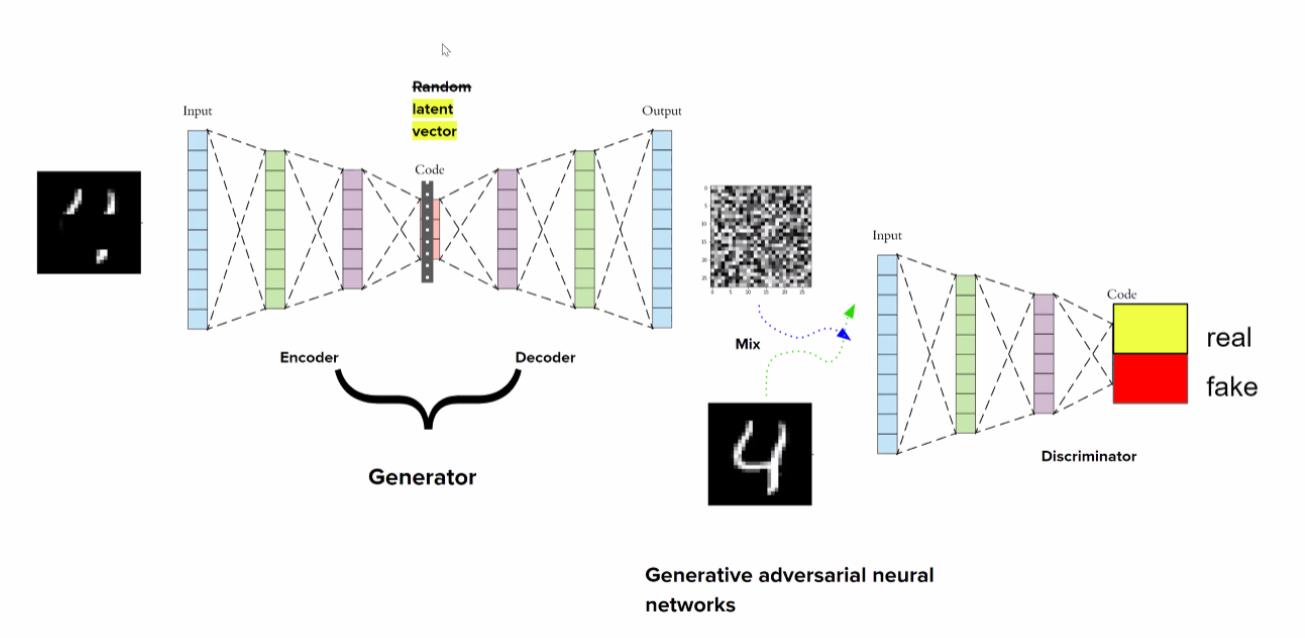
 2D GAN architecture
2D GAN architecture
Methodology_ workflow
roomlabel,roomshape,roomarea,relationbetweenrooms



Datasetgeneration

B200 Input
Labelmatrix Distancematrix Adjacencymatrix
Ground truth
Pix2pix Model Predictionimage
Labelmatrix Distancematrix Adjacencymatrix












A200
training:2004pairsofdata test:802pairsofdata Output
ReconstructioninGH Input image + magnetizing Grasshopper
...16348rolls
27nodes,68edges
...16348rolls
35nodes,64edges
roomlabel,roomshape,roomarea,relationbetweenrooms
Dataset generation Data
generation/ Feature embed
First consider_open dataset

Without labeled corridor information. Lack of dataset on public building plans


Dataset
RPLAN dataset FloorPlanCAD
Embed feature

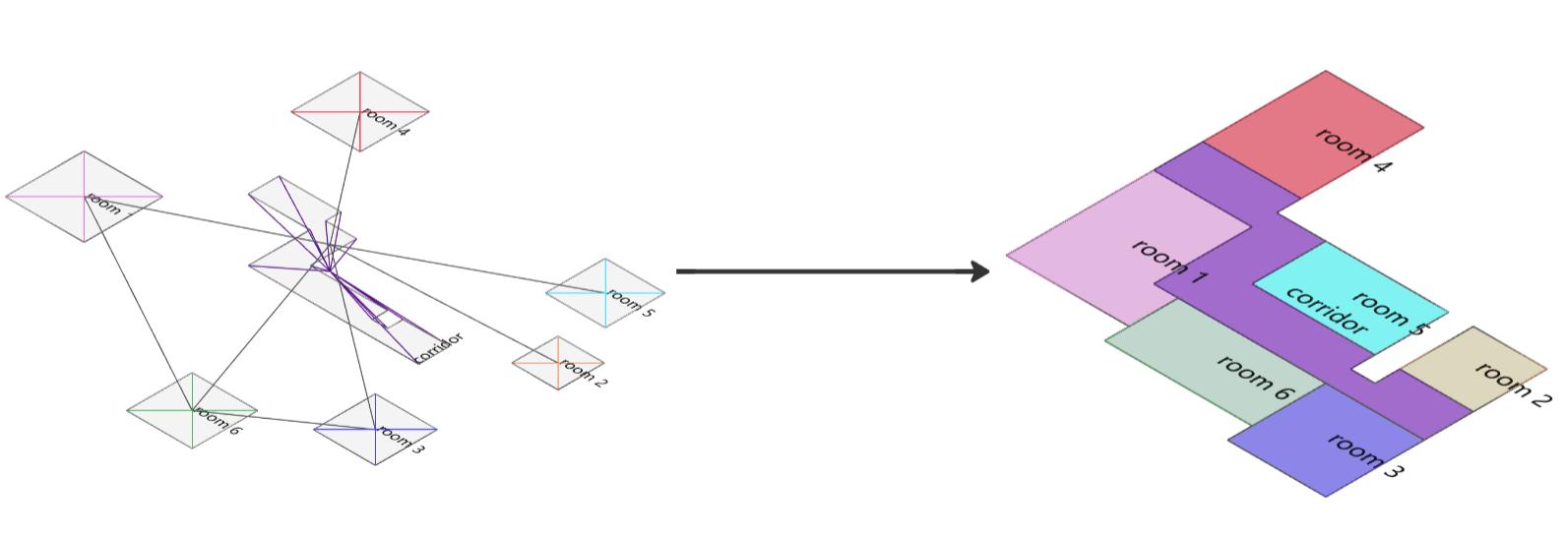
Here we use nodes and edges to depict a building information.
Nodes connections(yes/no) room


room label, room shape, room area, relation between rooms


Newtable Roomtype Room01 Label Labelinpixel matrix(0-1) 1 2 Room02 Room03 Room04 Room05 Room06 Room07 3 4 5 6 7 0.777778 Corridor 0.888889 8 0.11111 0.22222 0.33333 0.44444 0.555556 0.666667 1 9 Others Nodesdistance/edgelegnth room label area3=25 area2=9 area1=17 area4=16 area5=16 area6=23 area7=20 1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 5 5 5 5 6 6 6 6 7 7 7 7 8 8 8 8 8 8 8 8 8
edge label
room relation/room geometry
geometry
relation/room
Label matrix
Distance matrix
Adjacency matrix
Got input dataset

Output dataset (result from plugin)

area7=20
area4=16
area6=23
area5=16
Area/room label
area4=16
Obtain corresponding Input dataset


area7=20
area5=16
area2=9
area3=25
area1=17
area6=23
area2=9
area3=25
IfuseKangarootosimulatetheseconstrains andgenerateresult,youcan'tgetperfect result.
area1=17
Spatial Adjacency
User Input representation




1. Draw a reference line for corridor



2. Define the function and area you want
room01: 28sqm
room02: 7sqm
room03: 13sqm
room04: 18sqm
room05: 16sqm
room06: 14sqm
3. De
Dataset Variation
Around 2000 pairs of data with different area, rooms and configuration
Input Input Input Output Output Output
Training
Prediction results/ Reconstruction/ Problems
Training start
Distance matrix



Step:8999
Generator loss: 8.926547394154905
Generator l1 loss: 5.807867540837871

Discriminator loss: 3.611856884098233
Label matrix
Adjacency matrix
image
image
truth Prediction image Input image Ground truth Prediction image
Input image Ground truth Prediction
Input
Ground
Adjacency matrix



1st Training result _433,999
steps
Step: 433999
Generator loss: 7.69580344655172
Generator l1 loss: 4.187161721570787
Discriminator loss: 4.823407427206053

Label matrix Distance matrix
truth
Input image Ground truth Prediction image
Input image Ground truth Prediction image Input image Ground
Prediction image





Most of generation result has distortion. Prediction 01 Prediction 520 Adjacency Distance Label ≈ 0.111111 (label 01)
Prediction Result
Adjacency matrix

Distance matrix

Label matrix

Input image Ground truth Prediction image
2nd Training result
_988,999 steps
Adjacency matrix


Distance matrix

Step:988999
Generator loss: 7.494118938771732
Generator l1 loss: 3.8295014311102595

Discriminator loss: 4.693514201845212
Label matrix
Prediction Result
Adjacency matrix
Distance matrix
Label matrix
Input image Ground truth Prediction image
Prediction 255



Prediction 655
389


Prediction 430

Generation result still
distortion, but work better than before.
has
Prediction
Reconstruction in GH
User Input AI



Generated Outcome
reference line
rooms and area
room relations area(sqm) 29.5 15.3 14.9 12.6 9.9 23.2 32.4 / Newtable Roomtype Room01 area(sqm) 43.6 12.8 Room02 Room03 Room04 Room05 Room06 Room07 17.8 13 9.4 26.6 29 Corridor /
Reconstruction in GH AI
Input
Input
Input
Generated Input
Conclusion & Discussion
Conclusion/ Limitation/ Potential and Future work
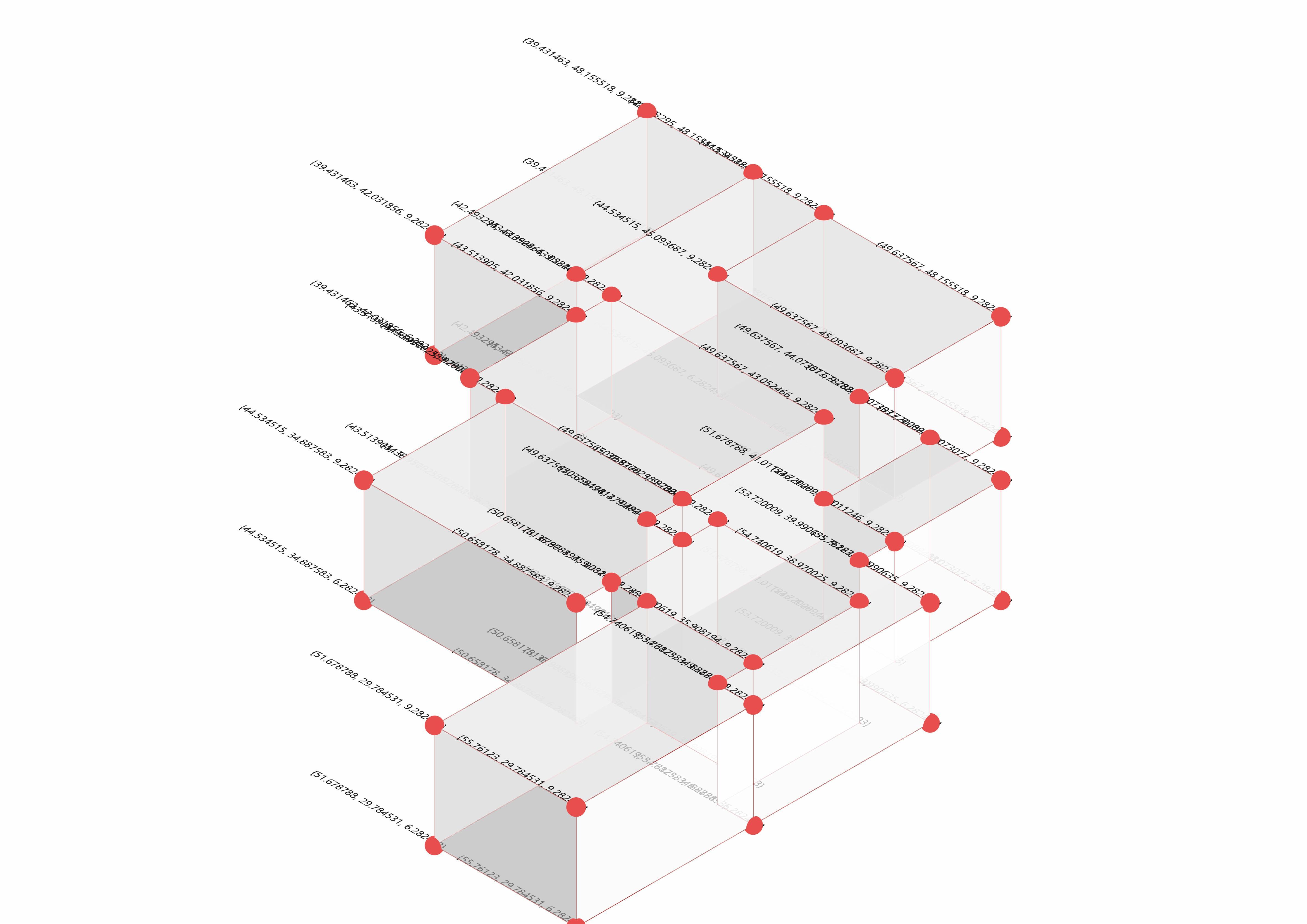
The method used in this study allows ML to accurately capture the shape relationships of the building plan, such as the foot points of the room, the center point of the room and the edges which is necessary to form the shape of the room. Theoretically, most linear geometric shapes can be expressed by the nodes and edges on their boundary. Therefore, compared with methods in some previous studies, the model after deep training should have the ability to accurately reconstruct complex spaces.

These multiple channels in Pix2Pix model allow us to learn more layers of information
In this study, we added a new layer of channel that can identify room labels based on adjacency matrix theory. This study verified its feasibility. This also means that it is possible to add more layers of information to the learning object to generate more complex models.
Conclusion
.
Go back to 3D generator
Theoretically, this methodology is also applicable to the reconstruction of 3D space.


Although this article does not continue an in-depth study on this, it is worth noting: for 3D generation, maybe we need use pix2pix HD model, which allow max 1024 feature nodes to depict a building. Of course, 3D space generation is more complicated than 2D. Whether the coding method needs to be modified requires some further studies.


transfer format training
Limitation
1, Pix2pix HD Model can deal with the image size of 1024 dpi. This generator cannot generate too big or too complex 3D buildings which has more than 1024 feature nodes.
2, This method has relatively high requirements for the depth of model
training. In the adjacency matrix, a small pixel error will cause a relatively large deviation. And obtaining an accurate distance matrix often takes longer to learn.
1, The previous research has shown that this method is feasible. Next, we can increase the training time or find a dataset that is more consistent with the actual situation and retrain the model to make the results more ideal.
2, Not only for the floor plan. How to use this method in the generation of 3D space requires further exploration.
3, It allows us to add more channels for different information. So, change or add more different constraints( sun hours, surrounding), let users control or interact with generator more intelligent.
Potential & Future work
THANKS !
