Dynamic Tensegrity System
Post-Disaster Temporary Shelters
MArch | Emergent Technologies and Design | Architectural Association School of Architecture | London | 2009-11
RIDDHI OSWAL
ARCHITECTURAL ASSOCIATION SCHOOL OF ARCHITECTURE
GRADUATE SCHOOL PROGRAMMES
DISSERTATION SUBMISSION
COVER SHEET FOR COURSE SUBMISSIONS 2009-2011
Programme : Master of Architecture, Emergent Technologies and Design
Student Name : Riddhi Oswal
Submission Title : Dynamic Tensegrity System Post-Disaster Temporary Shelters
Course Tutor : Mike Weinstock
Submission Date : 14th February 2011
DECLARATION:
“I certify that this piece of work is entirely my own and that any quotation or paraphrase from the published or unpublished work of others is duly acknowledged.”
Signature of Student:
Date: 14-02-2011
Place: London
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 4 Declaration
First and foremost I would like to thank my dad, mom, all my family members and friends back home for their immense support and belief in me. Their constant encouragement has always inspired me to work harder and better myself at every stage.
I am highly grateful to our course director, Michael Weinstock for his invaluable guidance and critical input at every stage of the project. I would also like to appreciate the feedback and help offered by Prof. George Jeronimidis and Toni Kotnik which was essential in developing the project. I take this opportunity to thank all my colleagues for creating a wonderful atmosphere to learn and work together throughout the course. I would also like to thank my friend Dishita for her assistance in phase one.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 5 Acknowledgements
The dissertation intends to develop dynamic tensegrity structures for post-disaster temporary shelters. The primary purpose of the project is to design a system for temporary shelters using irregular tensegrity that is easily deployable, lightweight and can be tailored according to the cultural and social needs of the people affected. The research addresses various limitations of the system development namely computational, analytical and fabrication. The developed system is then tested for a specific site with the purpose of reflecting the social and cultural pattern in the design of the temporary units.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 7 Abstract
Chapter 01 : Domain
IntroductIon
Post-dIsaster temPorary shelters
tensegrIty system
conclusIon
Chapter 02 : methoDs
IntroductIon
theorIes and methods
conclusIon
Chapter 03 : Digital exploration
PrelImInary exPloratIon
generatIve algorIthm
structural tests
sPatIal exPloratIon
conclusIon
Chapter 04 : site
andaman nIcobar Islands – an IntroductIon
tradItIonal archItecture of a&n Islands
exIstIng temPorary shelters
conclusIon
Chapter 05 : Design Development
desIgn strategy
modular hIerarchy
unIts: module organIzatIon
block organIzatIon
communIty organIzatIon
Chapter 06 : Design proposal
revIsed desIgn strategy
communIty organIzatIon
vIllage organIzatIon
fabrIcatIon
Chapter 07 : ConClusion
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 9 Contents
appenDix referenCes 13 35 47 73 83 95 107 111 151
System (Tensegrity)
Digital process
archItectural
Case stuDies
form finDing
ClassifiCation
Irregular bIomImetIc exploration
dIgItal (ParametrIc)
PhysIcal regular
optimization anD aDaptation
geometry generatIon
relaxatIon to stable form
volumetrIc analysIs
ground nodes evaluation
fabrIcatIon ease
Design (Post-disaster temporary shelters)
existing temporary shelters site stuDy
tents PrefabrIcated unIts
vernacular housIng tyPology
ProvIded temPorary shelter
system behaviour
Digital exploration
strut dImensIons
sPatIal organIzatIon
Design appliCation integrateD proposal
constructIon logIc
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 11
Process Diagram
Chapter 01 : Domain
01) INTRODUCTION
02) POST-DISASTER TEMPORARY SHELTERS
Disasters- Introduction
Concerns of Temporary Shelters
Types of Temporary shelters
Conclusion
03) TENSEGRITY SYSTEM
System definition
Characteristics
Advantages
Limitations
Case Study: Bio-tensegrity
Case Study: Architectural Application
04) CONCLUSION
The purpose of this chapter is to provide the theoretical basis that informs the hypothesis of this research project. Firstly, an overview on the various possible applications of temporary structures helps in setting a broad spectrum for the implementation of the intended research. This is followed by a brief note on contemporary post-disaster temporary shelters and the key concerns that need to be addressed while developing a system for their design and deployment. Explaining the physics and structural concept of tensegrity system, the domain presents the proposal and the design intent based on the research and analysis conducted.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 13 Domain
Introduction
Temporary structures
Temporary Structures have been widely used for various purposes in architecture due to their properties of being lightweight, easily deployable and reusable. These structures have varied applications ranging from enclosure for large social gatherings, exhibition spaces, tentcities for rapid occupancy and postdisaster emergency shelters.[Figure 1.2]
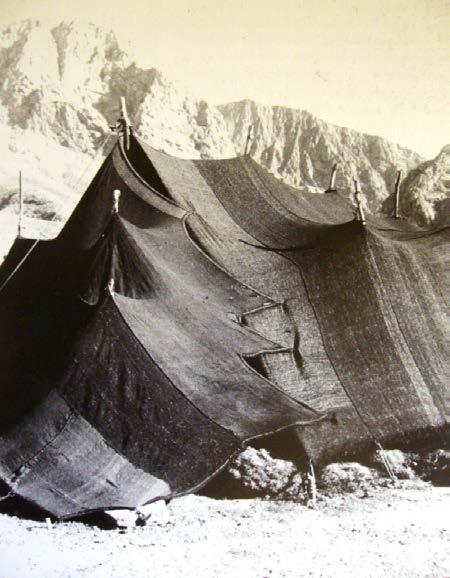
Tents are the primal form of temporary structures. Use of tents as a housing shelter can be traced back to 8500-6500 BC. Need for mobile and light-weight structures catering to the nomadic lifestyle shaped these early deployable tents. It is assumed that a specific type of tent, then so-called “black tent,” was first developed in the arid regions and possibly dates back to several thousand years. [Figure 1.1] They were well adapted to accommodate nomadic lifestyle. [1.1]



Made from woven fabric panels up to 10m long, multiple fabric panels are sewn together into larger tent covers. These covers are draped over wooden poles (compression struts) and stabilized with ropes (tensile cables) that are either staked into the ground or tied to heavy stones or pieces of wood. [1.2] Limited material strength of ropes and fabrics and modes of transport restricted the sizes of these tents. Over a period of few years, these tents were further developed to adapt to the climatic conditions of the specific site.
Even though tents are still widely used for temporary buildings, they have hardly evolved in terms of their constructional strategies and design. In the nineteenth century, circus tents were among the largest system and this tradition continues till date.
Figure 1.1 Sangesari tent, northern Iran, 1970. Source: Klaus-Michael Koch, ‘Membrane Structures’, Prestel, Munich,2004.
Figure 1.2 (counter clockwise) Images showing varied applications like tent cities, emergency shelters, circus tent and spaces for social gatherings respectively.
1.1 Bechthold Martin, ‘Innovative Surface Structures_ Technology and applications’, p. 18, Taylor & Francis, New York, 2008.
1.2 Bechthold Martin, ‘Innovative Surface Structures_ Technology and applications’, p. 19, Taylor & Francis, New York, 2008.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 14 Domain
Figure 1.1
Figure 1.2



showing applications such as expedition camps, membrane structures and tensegrity tower with structural principle similar to tents.
With advancement in material research, fabrication and transport technologies, a principle similar to the physics of tents is being employed to design expedition camps for scientific and military purposes, membrane structures, and pneumatic structures. As in tents, interaction and balance between compressive and tensile forces form the basis of tensegrity structures.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 15 Domain
Figure 1.3 Images
Figure 1.3


Developed countries
Developing countries
Post-disaster temporary shelters
Disasters
A disaster can be defined as an occurrence causing significant physical damage or destruction, loss of life and drastic changes to the natural environment. It is classified either as a natural disaster or a man-made disaster. It can be further subcategorized based on its speed of occurrence and the frequency at which it occurs. Post-disaster mitigation strategies primarily depend on the type and category of the disaster.
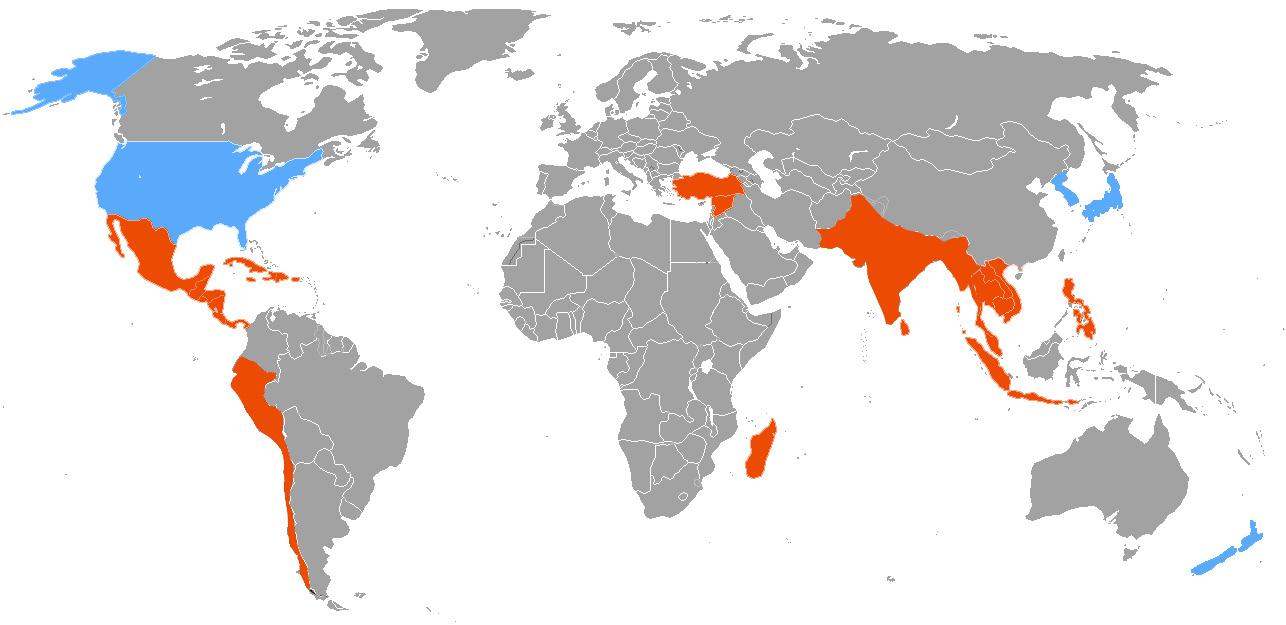
Natural disasters result from largely uncontrollable forces of nature such as earthquakes, tsunamis, floods, drought, volcano, and hurricane. It occurs in various forms and dimensions. A Large number of earthquakes and volcanic eruptions occur in the basin of Pacific ocean and the belt is known as ‘Pacific Ring of Fire’. [Figure 1.5] The Ring of Fire has 452 volcanoes and is home to over 75% of the world’s active and dormant volcanoes. About 90% of the world’s earthquakes and 80% of the world’s
largest earthquakes occur along the Ring of Fire. Most of the disaster prone developing countries like Chile, Guatemala, Haiti, Indonesia and Malaysia lie in this Ring of Fire. Statistics show that, developing countries suffer the greatest cost when disaster hits. 95% of the loss due to disaster occurs in developing countries as against 5% loss in developed countries since they are more vulnerable to hazards.
Disaster can also be redefined in terms of interface between a natural or man-made hazard and a vulnerable condition. Hazards that strike in areas with low vulnerability are not considered as disasters, as is the case in uninhabited regions. The intensity of natural hazard depends on three preconditions. These conditions are governed by geographical variables viz. a) unpopulated area, b) well-constructed city and c) badly constructed, ill-sited city. [1.3]
Figure 1.4 Destruction caused in Malaysia by Tsunami 2004.
Figure 1.5 World Map showing countries where most of the disasters occur due to ‘Pacific Ring of Fire’ .
1.3 Davis Ian, ‘Shelter after Disaster’, p. 15, Oxford Polytechnic Press, Oxford, 1978.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 16
Domain
Figure 1.4
Figure 1.5
Pacific Ocean


Concerns of Reconstruction process
1.6 (Left to Right) Images showing stages of reconstruction viz. temporary shelters, temporary housing and permanent housing respectively.
1.4 Prizeman Mark, ‘Emergency Dwelling’, Home front: New Developments in Housing, Architectural Design Journal guest-edited by Bullivant Lucy, p. 58, Wiley-Academy, Volume 73 No. 4, Issue July/August 2003.
1.5 Quarantelli, E.L., ‘Patterns of shelter and housing in US disasters’, Disaster Prevention and Management Journal, P. 43-53, Volume 4 No.3, 1995.
In a disaster scenario, provision of immediate relief is paramount. Besides provision of food, clean water and adequate sanitation, housing victims in safe shelters becomes an exigent requirement. With around 20 million people worldwide currently being sheltered by the UN High Commissioner for Refugees (UNHCR), the issue of designing emergency shelters that are suitable for a range of climatic conditions and situations becomes crucial. [1.4]
In theory, the process of post-disaster construction is carried out in four stages viz. emergency shelters, temporary shelters, transitional housing and permanent housing. The duration and functionality of these stages depend on the adequate availability of relief measures. Each phase has its own intended purpose and characteristics.
B) Temporary shelters: a place where a family resides immediately following the disaster for an extended short stay. This can be a tent, self-built shelter, prefabricated units or a public facility. The length of stay dictates the need for food, possible medical provision and other provisions. These shelters are occupied for a month or two.
C) Temporary housing: a place where a family resides temporarily and resumes its daily activities. This can be a prefabricated temporary house, a self-built shelter, a mobile home or an apartment. The intended period of use is two to three years.
D) Permanent Housing: This refers to the family returning to their rebuilt home or moving into new permanent quarters in the community.
According to Quarantelli [1.5], these stages can be defined as [Figure 1.7]: A) Emergency shelters: a place where a family stays during the height of an emergency. This can be a public facility or the home of a friend or family members.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 17
Domain
Figure
Figure 1.6


There is however a divergence between theory and practice in post-disaster reconstruction. Firstly, there is a wide difference in the way developed and developing countries approach disaster. In the case of the former, technology and resources ensure there is no delay in the provision of temporary shelters. Further, their efficient governance apparatus expedites relief and reconstruction process in a structured manner. On the other hand, developing countries are largely dependent on international aid to begin the reconstruction process. They cannot afford to invest in all the stages of accommodation as put forth by Quarantelli and hence it happens only in two stages: temporary shelter and permanent housing. Thus contrary to the purpose of ‘temporary’ shelter, they invariably occupy them for
many years.
Even though temporary housing is intended only for short-term use, the ensuing housing crisis in most post-disaster areas means that temporary housing has a great likelihood to become unplanned permanent housing for low income residents. [1.6] These temporary shelters have a far reaching effect in long term reconstruction programs. Over a period of time, if not duly accounted for, these areas tend to become socially and economically dysfunctional.
Thus temporary shelters, as the name suggests are not temporary in most of the post-disasters scenarios. They should be designed with the intention of resuming normal activities after the disaster until the completion of the reconstruction phase.
Figure 1.7 Image showing long term effect of temporary shelters in Haiti.
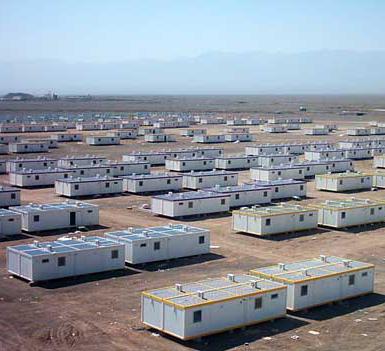
Figure 1.8 Izmit, Turkey 1999. Prefabricated aluminium shelters intended to house two family units for two years until replacement accommodation is available. Similar shelters in Italy were lived in for 15 years.
1.6 Johnson Cassidy, ‘Strategies for the reuse of Temporary Housing’ In Urban Transformations edited by Ilka & Andreas Ruby, Ruby Press, Berlin, 2008.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 18
Domain
Figure 1.7
Figure 1.8


Tents
Merits
• Quickest method
• Easily deployable
• Economical
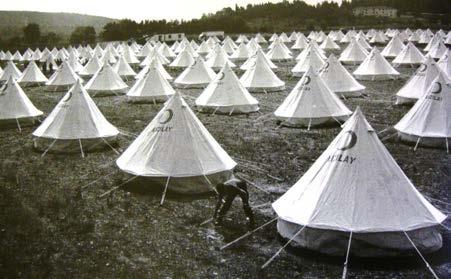
Figure 1.9 Images showing plastic tents as temporary shelters.
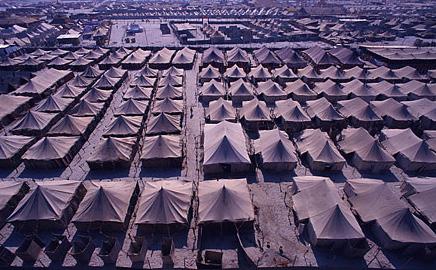
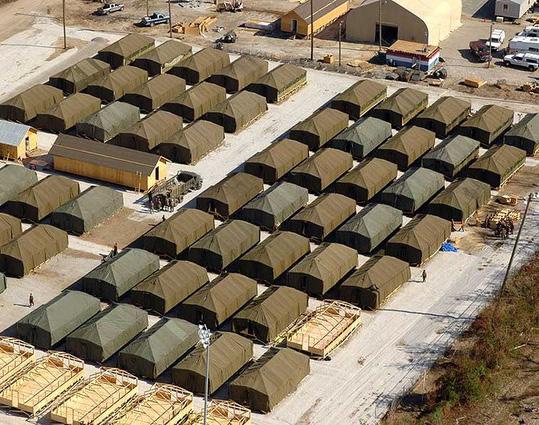
Figure 1.10 Image showing rigid pattern of military tents.
Figure 1.11 Diagram summarizing merits and demerits of tents as temporary shelters.
The focus of the thesis is on designing stable, culturally sensitive, flexible and affordable temporary shelters in resource constrained developing countries. The following section describes the types of temporary shelters in vogue, and their merits and demerits when used in a developing country.
There are two types of temporary shelters: tents and prefabricated units. Tents are the result of bottom-up approach where participation of local people in supplying shelters is significant whereas prefabricated units are fundamentally top-down where aid organizations and government agencies erect shelters in affected years often with minimal public involvement.
A) Tents:
Prior to the Second World War, tents were the only means of emergency shelters. Even though tents do not fulfil the requirements for sustenance of family life and climatic flux, they are the most preferred due to their inherent quality of being truly temporary. Because they can be easily stored, transported, deployed within hours and are economical, even today they are widely in use the quickest makeshift shelters available.
• Cannot sustain family life
• No response to social and cultural variation
• Climatically unsuitable Demerits
Types of temporary shelters
A delay in the supply of any other form of shelter unit, results in construction of tents by the victims themselves using locally available material. This results in a very chaotic and organic placement of these units on any available space. [Figure 1.9]
In theory these tents are supposed to serve only for a few weeks till the transitional or permanent housing units are built. But in reality, victims occupy them for months and in certain places even for years. For instance, eight months after the 1999 earthquake in Istanbul, Turkey, a large proportion of families were still living in self-made plastic and nylon dwellings.
The tents provided are usually military tents. Placement of these tents results in a rigid grid pattern [Figure 1.10] which does not respond to the cultural and social needs of the people. Another issue with them is a lack of variation in sizes. For example, many Haitians families have eight or nine children who sleep on straw mats in shifts due to insufficient size of the tents. Thus these tent sizes are more or less same without any modifications based on the family size and requirements.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 19 Domain
Figure 1.9
Figure 1.10
Figure 1.11


Prefabricated units
Merits
• Prefabricated
Demerits
• Modular (Universal solution)
• Expensive
• Delay in supply
B) Prefabricated Units:
Standard mass production has been the state of art in emergency architecture. Prefabricated units are designed as a better response to differences in climatic conditions, and to address issues related to durability and ease of fabrication. Even though they are successful in providing better living conditions to the people they have their own demerits.
Prefabricated units have been criticized for being unnecessarily expensive, and for delay in reaching the affected areas, thus drawing resources away from permanent reconstruction. [1.7]
During the recent earthquake in Haiti (2010), around 1,000,000 – a million people became homeless. Within weeks after the tragedy, Miami Architect Andres Duany had designed an ‘inexpensive’ and nearly ‘indestructible’ 2.4 x 6 meters little blue-
and-aqua hut [Figure 1.13] made of spaceage materials to be produced by a company offering to donate a thousand such hut to homeless Haitian families. Production of such 10,000 in a year was estimated. Each house intended for the very poorest Haitians, is to cost between $ 3,000 and $4,000, though the vast majority of the Haitians earn $660 a year. [1.8]
Even though, modularity in units is sought after due to ease in fabrication, it hinders the objective of providing shelters tailored to varied social behaviours and family needs of the people. Prefabricated units ignore the entire issue and inadvertently attempt to modify the cultural habits of the occupants. In lice, Turkey, tents are still in used alongside prefabricated units which probably indicate that the unit is too small for an extended family. [1.9]
Figure 1.12 Prefabricated unit provided by Red Cross.
Figure 1.13 Shelter designed by Architect Andres Duany.
Figure 1.14 Diagram listing merits and demerits of prefabricated emergency units.
1.7 Johnson Cassidy, ‘Impacts of prefabricated temporary housing after disasters: 1999 earthquakes in Turkey’, p. 36, Habitat International Journal 31(1), 2007.
1.8 Merkel Jayne and Whitaker Craig, ‘Rebuilding from below the bottom’, Post-traumatic Urbanism, Architectural Design Journal guest-edited by Adrian Lahoud, Charles Rice and Anthony Burke, p. 130, Wiley, Volume 80 No. 5, Issue September/October 2010.
1.9 Davis Ian, ‘Shelter after Disaster’, p. 15, Oxford Polytechnic Press, Oxford, 1978.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 20 Domain
Figure 1.12
Figure 1.13
Figure 1.14
units.
1.16


1.10 Prizeman Mark, ‘Emergency Dwelling’, Home front: New Developments in Housing, Architectural Design Journal guest-edited by Bullivant Lucy, p. 59, Wiley-Academy, Volume 73 No. 4, Issue July/August 2003.
Since most of the prefabricated units are manufactured away from the affected site, they often arrive late due to delays in production as well as in transportation. In Peru the first units were occupied 60 days after the disaster while in Managua the delay went up to 148 days. Recent example is of Andaman and Nicobar islands which were affected by Tsunami 2004, where only 200 temporary shelters were provided in the span of four months due to transportation and logistics issues. The delay in provision of immediate relief shelters defeats their very purpose.
Pertinent choice and provision of construction materials is very important while designing emergency shelters. Since fast deployment and affordability are the primary concerns, local availability of material, ease of fabrication, construction logic and suitability for climatic conditions should be key considerations while
selecting the materials. At present, there are numerous instances where these factors do not get reflected in the design. A case in point is the reconstruction that took place after the earthquake in Guatemala in the year 2001. The shelters provided were lightweight corrugated tin and timber housing units. The hapless victims had no option but to occupy them despite the fact that they reached 650C during the day. [1.10]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 21 Domain
Figure 1.15 Peru. Image showing shelter built by the victims due to delay in provision of prefabricated
Figure
Image showing temporary shelters made out of tin.
Figure 1.15
Figure 1.16



During emergency there is a huge demand of temporary shelters. To cater to this need, shelter providers have always sought a universal solution. However, it does not concord with the objective of providing shelters suitable to living standards, prevailing culture and climatic conditions. There are few architects like Shigeru Ban who are working towards providing temporary shelters that are site specific and reflect the material and social concerns in the design.
Ban has been working with paper tube as a construction material for post-disaster architecture since 1986. Paper tubes were used because they could be produced
locally and are economical. He believes that emergency shelters have to relate to the cultural background of the site and accommodate the social requirements of the victims. Also, modulations in the number of units, size of each unit, materials used should be achieved by involving local community in the design process so as to cater to their requirements. Contrary to stand alone top-down and bottomup process, Shigeru Ban has combined prefabrication and local construction in his designs. The approach could thus allow room for idiography in order for the shelters to truly cater to the needs of the victims.
1.17 Paper tube shelters provided in turkey. The sizes of the shelters are bigger to accommodate the large families in turkey.
1.18 Paper tube shelters provided in India. Note that the floor is of earth instead of plastic beer crates as in case of turkey.
1.19 Image showing involvement of victims in the construction of temporary shelters.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 22
Domain
Figure
Figure
Figure
Figure 1.17
Figure 1.18
Figure 1.19
1.20 Haiti 2010. Almost a year after the country's devastating earthquake, an estimated 1 million people are still living in accommodation intended as temporary shelter.

Conclusion
There is a need to contrive an appropriate solution to overcome the inadequacies of existing types of temporary shelters. The ability of a design that could be rapidly deployed along with the positive social, economic and environmental benefits out of it, determine its success. Integration of physical characteristics with social context should guide the design and development of temporary shelters.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 23 Domain
Figure
Figure 1.20

Tensegrity System
System Definition
Although tensegrity system has been highly researched with varied patented definitions, the most widely accepted and comprehensive one is that of Anthony Pugh. According to him, “A tensegrity system is established when a set of discontinuous compressive components interacts with a set of continuous tensile components to define a stable volume in space.”[1.11]
History of tensegrity structures and various definitions of tensegrity system by individual researchers is listed in detail in Appendix A for further reference.
Definitions
Buckminster fuller (1961)
David Emmerich
Kenneth Snelson (1965)
Anthony Pugh (1976)
Schodeck (1993)
Bin Bing (1998)
Kanchana Sarastool & Williamson (2002)
Ariel Hanaor
Miura & Pallegrino (2002)
Rene Motro (2003)
Figure 1.21 Diagram explaining components of a tensegrity structure.
Figure 1.22 Diagram listing chronologically the research on tensegrity and the respective researchers.
1.11 Jeongheon Han, Skelton Robert, Williamson Darrell, ‘Equilibrium conditions of a Tensegrity structure’, International Journal of Solids and Structures, P. 6347-6367, 40(23), 2003.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 24 Domain
Figure 1.21
Tensile cables
Compressive struts
Figure 1.22

Characteristics
Figure 1.23 Diagram explaining forces forming a tensegrity structure.
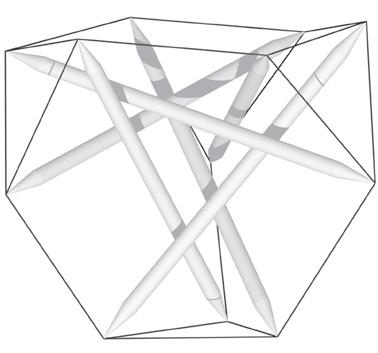
Figure 1.24 An example of a pure tensegrity.
1.12 Jeongheon Han, Skelton Robert, Williamson Darrell, ‘Equilibrium conditions of a Tensegrity structure’, International Journal of Solids and Structures, P. 6347-6367, 40(23), 2003.
In relation to the theory of systems, it has components (two kinds, in compression and in tension), relational structure (between the different components), total structure (associating relational structure with characteristics of components) and form (projected on to a three-dimensioned referenced system). [1.12]
Components:
In contrast to the term “element”, the component can be a strut, a cable, a membrane, an air volume, an assembly of elementary components, etc. The components are either in compression or tension as opposed to component being in compression and tension. There is continuous tension and discontinuous compression in the system because the compressed components must be disconnected, while the tensioned components create an “ocean” of continuous tension.
False and pure tensegrity:
Motro defines a system as one of tensegrity when all its compressed components are inside the system, and a compressed element is inside when the points between its ends do not belong to the boundary (or envelope). Thus, in a Tensegrity system, the action lines lying on the boundary surface are tension lines.
Stable Self-equilibrium state:
The system is stable because it can reestablish after a disturbance, and selfequilibrated because it doesn’t need any other external condition; it is independent of external forces (even gravity) or anchorages due to its self-stress initial state.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 25 Domain
Figure 1.23
Figure 1.24
Nodal Tensile forces
Nodal Compressive force
Advantages
• No torque or torsion: As the components in compression are discontinuous, they only work locally. The compression is located in specific and short lines of action and hence buckling is very rare in these components. Due to this discontinuity in compression, they do not experience any kind of torque or torsion.
• Enantiomorphism: Some tensegrity systems, under axial load, experience a rotation around their axis. The direction of this rotation depends on the handedness of the system. This means that they exist in right and left-handed mirror pairs, ‘dextral’ and ‘sinistral’ respectively.
• No point of Local weakness: The multidirectional tension network encloses fortuitous stresses where they take place, so there are no points of local weakness.
• Economical: There are no redundant parts in the system. Due to the ability to respond as a whole, it is possible to use materials in a very economical way, offering a maximum amount of strength for a given amount of building material.
• Deployable: It is lightweight as compared to other structural concepts with similar resistance. It can be easily deployed and can be assembled in short time spans.
• Complex system organization:
Modularity of this system facilitates formation of complex system organizations and hierarchies. The spatial definition of individual stable tensegrity modules, displays the capacity of the system to create varied assemblies by connecting them together.
• Synergy: The system exhibits the property of synergy where the behaviour of the whole system is not predicted by the behaviour of any of its components taken separately.
• Self stress: If the self stressing is higher in a tensegrity system, its load bearing capacity is higher too. Using the analogy of a balloon; if a balloon is more inflated, the tension forces in the skin are greater and it is difficult to deform it.
• Kinematic indeterminacy: kinematic indeterminacy of tensegrity is sometimes an advantage. In foldable systems, only a small quantity of energy is needed to change their configuration because the shape changes with the equilibrium of the structure.
• Resilient: The fact that these structures vibrate readily means that they are transferring loads very rapidly; hence loads cannot remain local. They are transmitted uniformly and absorbed throughout the structure. This is very useful in absorption of shocks and seismic vibrations. [1.13]
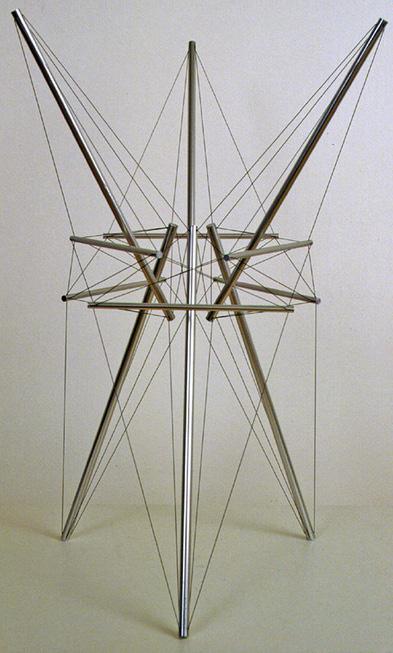
Figure 1.25
Figure 1.25 Highly stable tensegrity structure that can be deployed and reconstructed in very less amount of time.
1.13 Jeongheon Han, Skelton Robert, Williamson Darrell, ‘Equilibrium conditions of a Tensegrity structure’, International Journal of Solids and Structures, P. 6347-6367, 40(23), 2003.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 26 Domain

1.26
Figure 1.26 Kenneth Snelson's sculpture in the process of being installed spanning the water body.
1.14 Jeongheon Han, Skelton Robert, Williamson Darrell, ‘Equilibrium conditions of a Tensegrity structure’, International Journal of Solids and Structures, P. 6347-6367, 40(23), 2003.
Limitations
• According to Hanaor, tensegrity arrangements need to solve the problem of bar congestion. As some designs become larger, the struts start running into each other. His experimental research also states that tensegrity has relatively high deflection and low material efficiency as compared with conventional, geometrically rigid structures.
• In order to support critical loads, the pre-stress forces should be high enough, which could be difficult in large size constructions.
• The most important limitation is the inadequate design tool. Even though tensegrity as a structural system has more advantages than the conventional systems, limitation in digital simulation of its complex system behaviour digitally and in obtaining morphological variations is hindering its wider applications in architecture.[1.14]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 27 Domain
Figure

Bio-tensegrity
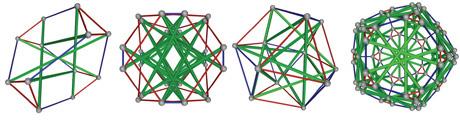
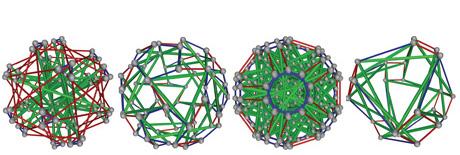
Biological models provide for a coherent case study for understanding dynamic open systems. Complex collective behaviour of a dynamic system generally emerges from interactions among components that exhibit simple behaviour. Tensegrity systems too, like other complex systems are widely existent in nature exhibiting dynamic mechanisms in processes at various scales from anatomical level to cellular and molecular level. It is important to study these examples not only for a better investigation of the system but also to understand the dynamic behaviour of these systems as most of the tensegrity natural systems display locomotive or kinetic mechanisms.[1.15]
1.15 Donald Ingber, 'The Architecture of Life', Scientific American, p.48-57, Jan 1998.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 28 Domain
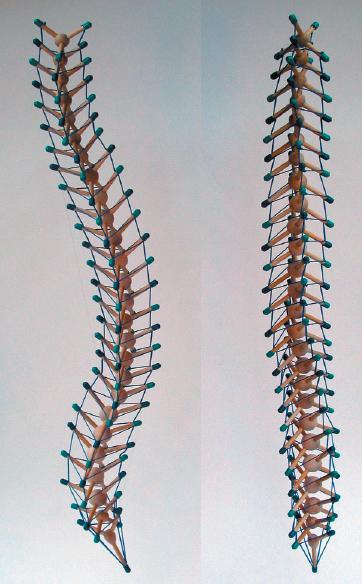
Figure 1.27 Tensegrity analogy models of Human Vertebrate column.
Figure 1.27
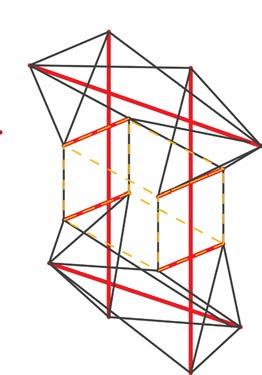
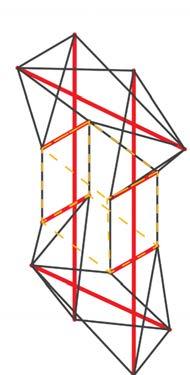
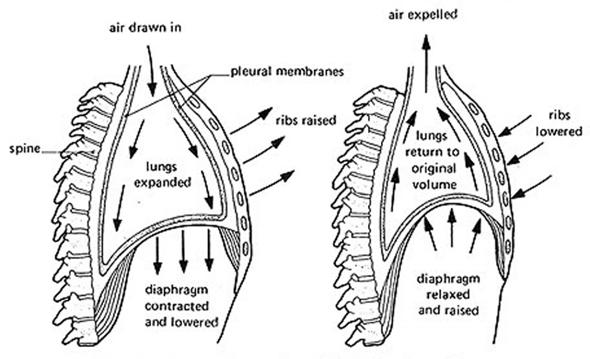
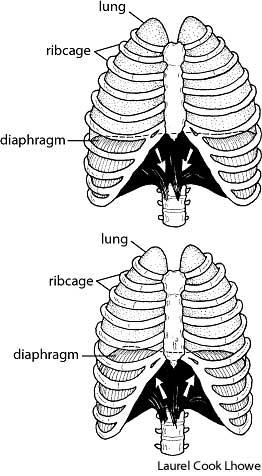
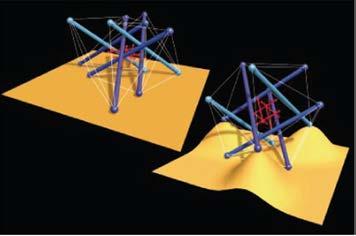
Figure 1.28 Diagram of an eight strut octa-hedral tensegrity model depicting the expansion and contraction of rib cage during respiration.
Figure 1.29 Images showing expansion and contraction of rib cage and diaphragm during respiratory process.
Anatomical Examples
On an anatomical level, the human body provides a good example of a pre-stressed Tensegrity structure. Bones act as struts resisting the pull of tensile muscles, tendons and ligaments. Moreover, the stability of the shape of the body, or its stiffness is a function of the tone, or pre-stress, of its muscles. As Ingber puts it, “We are 206 compressionresistant bones that are pulled up against the force of gravity and stabilized through a connection with a continuous series of tensile tendons, muscles, and ligaments”.
[1.16]
Core Body Torso
1.16 Donald Ingber, 'How cells (might) sense microgravity'. FASEB J, 1999.
1.17 Donald Ingber, 'How cells (might) sense microgravity'. FASEB J, 1999.
The core of the body, the torso has bilateral symmetry, oscillates (breathes) and is bounded on all sides by bony structures. Breathing causes the thoracic cage to expand and contract following the pumping action of the diaphragm[Figure 1.29]. By
abstracting the shape somewhat it is feasible to map the force vectors of the torso onto an expanded octahedron Tensegrity. The diagram alongside shows a modified x-octa tensegrity, which contracts and expands in the same way the torso does [Figure 1.28]. As two parallel struts are pulled apart (equivalent to the expansion of the ribs) both other parallel pairs counter intuitively expand and pull away from each other as well. Built from only six struts (suitably modified) they correspond to the boundary planes of the torso– the transverse planes of the clavicle and the pelvis, the coronal planes of the spine and sternum, and the sagittal planes of the ribs on both sides.
[1.17]
The study of this bio-tensegrity demonstrates uniform dynamic volumetric changes resulting with mere changes in tension of the cables.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 29
Domain
Figure 1.28
Figure 1.29 Inhalation
Exhalation
Cellular Level Examples
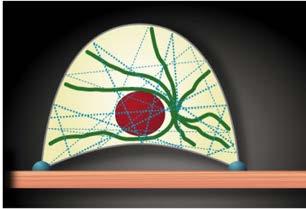
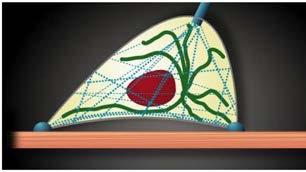
The cell possesses a molecular framework called the cytoskeleton enclosed within the surface membrane that mechanically stabilizes the cell. The cytoskeleton is comprised of three different types of molecular protein polymers, called microfilaments, intermediate filaments and microtubules. This network of molecular struts and cables allows the cell to alter the balance of tension and compression throughout its structure in order to maintain its shape, even when external forces are imposed upon it.[Figure 1.32] Cytoskeleton
The cellular tensegrity model proposes that the whole cell is a pre-stressed tensegrity structure, wherein tensional forces are borne by cytoskeletal microfilaments and intermediate filaments. These forces are balanced by interconnected structural elements that resist compression, most notably, internal microtubule struts and extracellular matrix (ECM) adhesions. The tensional pre-stress that stabilizes the whole cell is generated actively by the contractile
actomyosin apparatus. The living cell is more complex because it is a ‘multi-modular’ tensegrity structure. The cell is composed of multiple smaller, self-stabilizing tensegrity modules that are linked by similar rules of tensional integrity. As long as these modules are linked by tensional integrity, then the entire system exhibits mechanical coupling throughout and an intrinsic harmonic coupling between part and whole. However, destruction of one unit in a multimodular Tensegrity, however, results only in a local response; that particular module will collapse without compromising the rest of the structure.
Molecular Level Examples
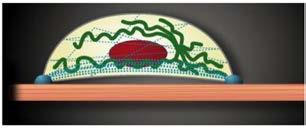
Several geodesic tensegrity structures naturally occur on the molecular level. [Figure 1.33] Basement membrane proteins, polyhedral enzyme complexes, clatrincoated transport vehicles, viral capsides, lipid micelles, individual proteins, and RNA and DNA molecules all employ hexagonal arrangements.
Figure 1.30 Images showing expansion and contraction of cytoskeleton.
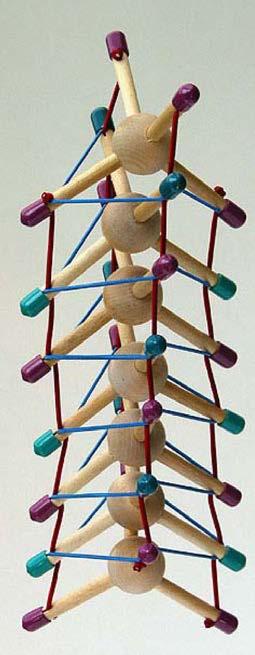
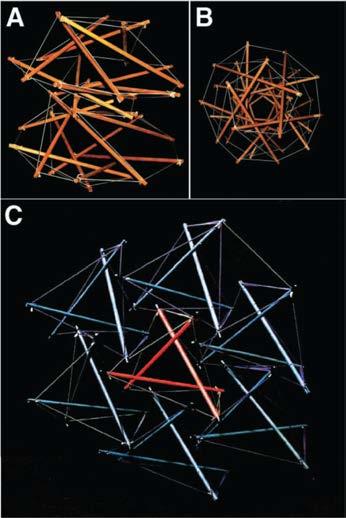
Figure 1.31 Hierarchical organization of tensegrity modules.
Figure 1.32 Multimodular tensegrity model of cytoskeleton that enables dynamic behaviour.
Figure 1.33 A multimodular tensegrity model of a portion of the internal cytoskeleton containing long microtubules (yellow) that interconnect and stabilize multiple smaller polygonal networks comprised of contractile microfilaments (blue). Microfilament contraction induces compressive buckling in the semiflexible microfilament struts (right vs. left).
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 30 Domain
Figure 1.30
Figure 1.31
Figure 1.33
Figure 1.32


Tensegrity in Architecture
1.34 Image of Dragon sculpture made of stainless steel measuring 9.3 x 9.4 x 3.6 m.
Figure 1.35 Image of Needle tower made of aluminum & stainless steel measuring 30 x 6 x 6m.
Kenneth Snelson sculptures
A. Needle Tower
The needle tower [Figure 1.35] was built by Kenneth Snelson in 1968 at the Hirshhorn Museum of Art. The structure was a succession of Tensegrity modules, decreasing in size, organized around a vertical axis, very similar to the organization of the human spine.
B. The Dragon
A cantilevered Tensegrity structure [Figure 1.34] built in 2000, wherein the forces of gravity are balanced in the structure by the tensile continuum of forces. The stresses that arise in the lower parts of the cantilever are distributed to the whole structure, allowing large cantilevers.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 31
Figure 1.34
Figure 1.35
Figure
Domain

The tank street bridge
The tank Street Bridge is designed by Baulderstone Hornibrook Queensland and Cox Rayner Architects, in Brisbane Australia in collaboration with ARUP. This bridge of 425m is the first Tensegrity Bridge for pedestrians and bicycles ever built solely as a Tensegrity structure. The bridge was built from both ends, without any supports since the Tensegrity property of the structure takes into account the gravity forces and thus allows large cantilevers.
Tensegrity tower
The Tensegrity Tower was conceived by architects Gerkan, marg and Partners for a


fair in Rostock, Germany, in collaboration with engineers Schlaich, Bergermann and Partners. The modules of the tower consisted of three 10m long struts and nine cables. The production method, fabrication technique and assembly logics followed in the project were extremely crucial and helpful in understanding the practical constraints and hindrances in the execution of a large Tensegrity Design project. The procedure was executed in 3 steps:
a. Assembly of modules using temporary supports for positioning the struts
b. Complete Pre-Stressing using three jacks of 100t capacity.
c. State of interconnection of modules.

and
Figure 1.40 Six tier modular tensegrity tower of three strut tensegrity module.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 32
Domain
Figure 1.36
Figure 1.37
Figure 1.39
Figure 1.40
Figure 1.38
Figure 1.36 Images of the Tank Street Bridge.
Figure 1.37 Digital model of the end connection.
Figure 1.38
Figure 1.39 Detailed view of the modular connection of the Tensegrity tower.
1.18 Dresp-Langley Birgitta and Quirant Jerome, ‘Design Principles and use of compression structures with tensile integrity’, Department of Mechanics and Civil Engineering, University of Montpellier, France, 2008.
Tents
Tensegrity Temporary Shelters
Prefabricated units
economIcal
easIly dePloyable
cannot sustaIn famIly lIfe
no resPonse to socIal and cultural varIatIon clImatIcally unsuItable
easIly dePloyable
PrefabrIcated
economIcal taIlored solutIon
resPonse to socIal and cultural varIatIon
structurally stable
PrefabrIcated unIversal solutIon exPensIve
delay In suPPly
Conclusion
From the analysis, it can be observed that high potential of the tensegrity system has not been utilized or even explored in architecture. The system has been only used to design bridges, installations or sculptures. However there is a wide potential and scope for developing this system into habitable structures.
With their ability to restabalize after external disturbances, the design of quickly deployable and yet structurally efficient emergency shelters to accommodate people in extreme situations can be another possible domain where tensegrity designs could prove particularly appropriate. [1.18]
This research work aims at developing a digital setup to explore vast morphological possibilities of tensegrity system and proposing a design that is modular in its structural system but can be spatially reconfigured and reorganized to suit the requirements of the user. This will enable to create designs that will incorporate all the prerequisites necessary for a temporary shelter.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 33 Domain
Chapter 02 : Methods
01) INTRODUCTION
Non-linear complex systems
Tensegrity as a non-linear complex system
02) THEORIES AND METHODS
Analytical methods
Physical methods
Digital methods
Morphological classification
03) CONCLUSION
This chapter focuses on setting up a theoretical base for developing system specific digital tools and processes. It summarizes analytical, physical and digital processes explored till date by various researchers to understand and simulate the complex system behaviour of tensegrity structures. This study forms the basis for further formulation of the digital process developed in the project to obtain morphologically varied and irregular tensegrity structures.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 35 Methods
Introduction
Non-linear complex systems
Manuel DeLanda, in his writings describes the significant difference between conventionally studied linear systems and the recently researched non-linear complex system behaviours. [2.1] The linear Systems tend to be characterized by a single global state, but the systems which are both nonlinear and non-equilibrium display multiple stable states and these may come in a variety of additional forms, namely steady, periodic and chaotic states.
These concepts are also explained by causality principle [2.2] which describes relationship between the causes and effects. A strict causality displays a predictable linear behaviour with the result being directly proportional to the input parameters; A weak causality also displays a fairly predictable yet imprecise behaviour based on the input factors; Distributed causality, which is displayed by most of the non-linear dynamic systems with small
Causality Principle
Strict Causality
Weak Causality
Distributed Causality
Input (Cause)
Input (Cause)
Input (Cause)
Direct relation and proportion
Output (Effect)
Linear system
Direct relation
Unpredictable relation
variations in the initial condition of the system, however produce large variations in the long term behaviour of the system. These multiple stable states characterize not only inorganic material behaviour, but also organic social behaviour. [2.3]
According to DeLanda, any complex system, whether composed of interacting molecules or organic creatures or economic agents, is capable of spontaneously generating order and actively organizing itself into new structures and forms. [2.4] It is precisely this ability of matter and energy to self-organize and exist in multiple stable state, that is of great significance due to its potential application in various fields of design and development. The spontaneous generation of form as well as the morphogenetic potential of a material system can be best expressed by studying and analyzing its complex and variable behaviour.
Output (Effect)
Output (Effect)
Non-linear complex system
Figure 2.1 Illustration created in processing for a nonlinear physics based model of keywords connected by springs.
Figure 2.2 Diagram explaining causality principle.
2.1 Manuel DeLanda, ‘Material Complexity’ In Digital Tectonics edited by Neil Leach, David Turnbull, Chris Williams, p. 14, Wiley-Academy, United Kingdom, 2004.
2.2 Heinz-Otto Peitgen, Hartmut Jurgens, Dietmar Saupe, ‘Chaos and fractals: new frontiers of science’, p.11, Springer-Verlag, London, 1992.
2.3 Manuel DeLanda, ‘Material Complexity’ In Digital Tectonics edited by Neil Leach, David Turnbull, Chris Williams, p. 16, Wiley-Academy, United Kingdom, 2004.
2.4 Manuel DeLanda, ‘Material Complexity’ In Digital Tectonics edited by Neil Leach, David Turnbull, Chris Williams, p. 15, Wiley-Academy, United Kingdom, 2004.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 36 Methods
Figure 2.1
Figure 2.2
Digital tools
System behaviour simulation
System behaviour analysis
Generative Design
Optimized output
Structural performance
Figure 2.3 Diagram explaining importance of digital tools in obtaining an optimized solution.
One of the most challenging constraints in studying the behaviour of a complex dynamic system is the tedious nature of the conventional analog methods that comprises of traditional physical testing and mathematical analysis procedures. This results in the need for developing advanced digital tools and processes that can cope with the complexity of the system behaviour without complicating the usability of the tool interface. While on one hand digital analytical methods facilitate studying material and structural system behaviour, properties and characteristics for enabling in-depth understanding and precise prediction of the system performance under varied conditions; on the other hand, digital simulations facilitate for optimal solutions
and performance.
Kristina Shea, in her essay “Directed Randomness” explains the importance of computational generative design and its use with instantaneous feedback to generate new forms and design solution with optimized space usage, structural performance, thermal conditions, lighting effects and fabrication ease. Exploring the potential of this methodology for formal, morphological and structural configurations and variations is one of the main areas of research of the intended study.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 37 Methods
Figure 2.3
Tensegrity as a non-linear complex system
Although conventionally studied classic regular Tensegrity Structures can be classified as linear systems, recent investigation in the field of developing and designing the irregular tensegrity has led to understanding the complex behaviour of Irregular Structures.[2.5] While the primary parameters governing the morphological stable state of the system are the properties of its compressive and tensile components, the connection logic between the components and nodal kinetic degrees of freedom of the configuration also contribute significantly to the resultant stability. These parameters essentially govern the distributed causality behaviour of the system where a slight variation in the initial conditions affects drastically the morphology of resultant varied stable state.
Tensegrity structures, with its potential to configure itself into multiple stable states based on equilibrium states of its components, provides for a very efficient system to be explored for dynamic structural behaviours. Quite paradoxically, the kinematics of the system informs the static and final form of the configuration of the system. The primary objective of studying irregular tensegrity structures is to design a structurally dynamic tensegrity system that inherently possesses the potential to adapt to varied contexts and its respective demands, requirements and spatial needs.
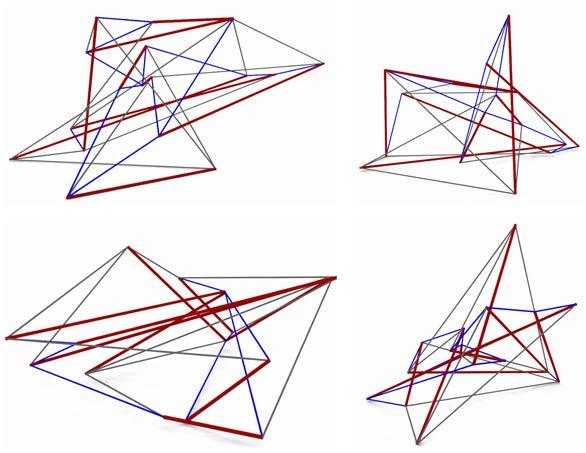
Figure 2.4 Diagram illustrating non-linear behaviour of tensegrity system with multiple stable relaxed states evolved from the same unstable basic seed.
2.5 Manuel DeLanda, ‘Material Complexity’ In Digital Tectonics edited by Neil Leach, David Turnbull, Chris Williams, p. 14, Wiley-Academy, United Kingdom, 2004.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 38
Methods
Figure 2.4
Relaxation
Multiple Stable forms
Unstable initial configuration
Analytical methods
Kinematic method
• Strut length is constant and cable length is decreased.
• Cable length is constant and strut length is increased.
Analytical solution (Connelly and Terrell)
2.5
Non-linear programming (Pellegrino)
Figure 2.5 Diagram classifying various analytical methods used to study tensegrity.
Detail description of each method is given in Appendix B.
Dynamic relaxation (Motro and Belkacem)
2.6 Pellegrino. S, Tibert. A.G., ‘Review of form-finding methods for Tensegrity structures.’
2.7 Pellegrino. S, Tibert. A.G., ‘Review of form-finding methods for Tensegrity structures.’
Statical method
• Topology and forces in members is known.
• Equilibrium state is calculated.
Analytical solution (Kenner) Force density method (Linkwitz and Schek) Energy method (Connelly)
Reduced coordinates (Sultan)
Although Tensegrity structures have been around for 50 years, it is only recently that they have been analyzed from an engineering perspective with focus on system dynamics and mechanics. Most of the research uses Newtonian mechanics and Euler-Lagrange equations to analyze tensegrity structures exploring the form finding relationships (limited to symmetric examples) and force displacement associations. However, the latest experimentation of kinematic methods determines the geometry of a given tensegrity structure by maximizing the lengths of the struts while keeping constant the given lengths of the cables. [2.6]
Hanaor, in 1992, was one of the first ones to suggest that a kinematic method would be useful for position finding. However no functional algorithms are available to date using the kinematic method. Oppenheim and Williams, in 1997 describe, in their articles on tensegrity prisms, the use of kinematics and static matrices for incremental position finding of variable geometry truss tensegrity structures. They also discussed the force displacement relationships in elastic tensegrity structures and investigated vibrations in these structures.
Theories and Methods
Analytical methods
Sultan, Corless, and Skelton, in 2001 studied finding the equilibrium positions of tensegrity structures where pre-stress is allowed using a virtual work approach. They also published a paper on application of a tensegrity structure as a flight simulator.
Pellegrino and Calladine analyzed statically and kinematically indeterminate structures using matrices.
classification of Analytical methods:
A. Kinematic Method
1. Analytical Solution
2. Non-Linear Programming
3. Dynamic Relaxation
B. Statical Method
1. Analytical Solution
2. Force-Density Method
3. Energy Method
4. Reduced Coordinates
From the study of these methods it can be concluded that the kinematical methods are best suited towards obtaining only configuration details of the structures that are already essentially known. The force density method is best suited to searching the new configurations, but affords no control over the lengths of the element of the structure. [2.7]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 39 Methods
Figure



Tensegrity modelling workshop at the University of Sheffield.
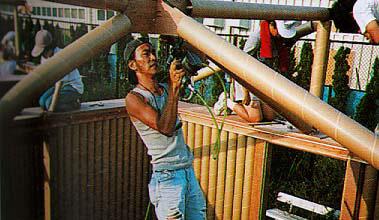
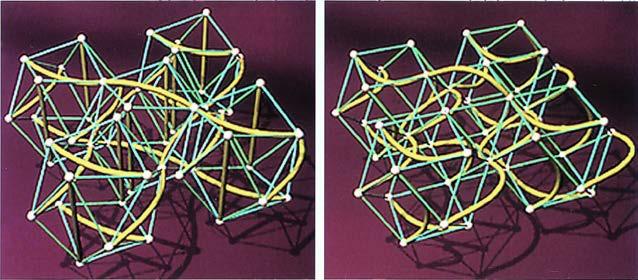
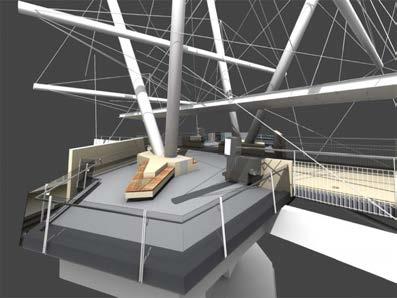
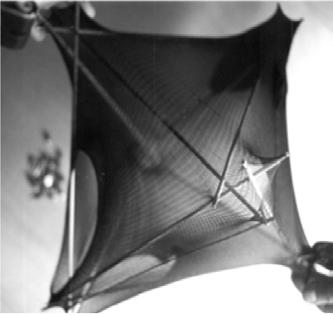
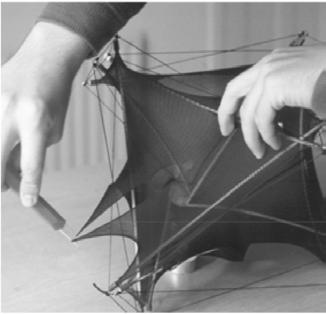
This workshop was aimed at developing exclusively only physical methods for form finding and exploring tensegrity structures. Use of ‘Cocoon’ method, in which a tensegrity module can be developed by inserting struts inside a dense network of membranes (tensional network), explored immense number of possibilities that physical experimentation can offer using various methods. In addition to enhancing the understanding of the system, it also helped in architectural and spatial exploration of the system by designing enclosed spaces. [Figure 2.9] The second part of the workshop further developed on the process and focused on assigning programmatic functions to these spaces and sculptures thus applying the system to functional designs. [2.8]
Since struts have to lie within a space defined by the tensional network, the idea developed was to substitute the final linear network with a dense one during the first stages of the modelling procedure. The method developed, consists of four steps. The first is to construct the membrane that would enclose the tensegrity. Struts are then inserted inside that membrane making it progressively taught – the dense network allowing for easy changes to their topology. Once the system reaches the desired result with all struts in place, the third step of the process is to stabilise them by the introduction of the linear tensional network on top of the membrane, attaching it to the nodes protruding from the enclosing dense tensional network. The final stage of the process involves the removal of the dense membrane. [Figure 2.6]
Figure 2.6 Images demonstrating the 'cocoon method' of modelling tensegrity structures. The left side image shows struts inserted in the dense membrane network. The right side image shows the final stage of removing the dense membrane network.
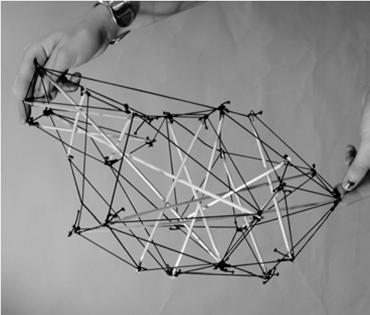
Figure 2.7 Examples tensegrity models modelled during the workshop.
Figure 2.8 Image showing effect of buckling members on the tensegrity structure.
Figure 2.9 Image of finished shelter erected during the workshop.
2.8 Konstantinos Sakantamis, Olga Popovic Larsen, E. Gutierrez, ‘Two years of tensegrity modelling workshops at the University of Sheffield, school of architecture.’
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 40 Methods
Figure 2.6
Figure 2.7
Figure 2.8
Figure 2.9
Tensegrity structural system constitutes 3-dimensional stable mechanical structures that maintain its stability due to an intricate equilibrium of forces established between its rigid and disjoint compressive and continuous tensile components. However, the determination of stable configurations that result from the connectivity patterns between the compressive and tensile components is highly challenging. Thus the form-finding processes of the tensegrity structures involve computational support juxtaposed with algorithmic approach to overcome the limitations of the available mathematical methods that have restricted scope of morphological exploration.
This research involves use of evolutionary algorithmic approach to thoroughly investigate a set of arbitrary tensegrity structures, which are difficult to design
Digital methods
using traditional methods and determine new irregular forms with optimal architectural relevance. The procedure involves use of dynamic relaxation methods for simulating the material properties and system performance to obtain stable forms based on the input mechanical constraints and kinetic freedom. The rigorous analysis, evaluation, elimination and selection procedure aims at achieving an optimal set of digitally developed and tested modules.
This would provide the basis for next stage of design development and complexity based on organization logics of the emergent design.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 41 Methods
Figure 2.10
Figure 2.10 Image showing example of symmetric tensegrity structures produced by Robert Connelly and Allen Back using Maple and the Open source visualization software.
Methods
The following text describes two evolutionary processes which form the basis and guideline for the algorithmic process developed in this research.
Automated and Open-ended process:
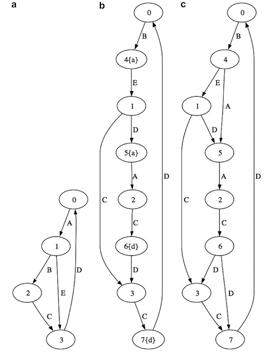
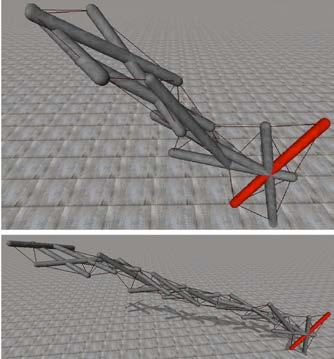
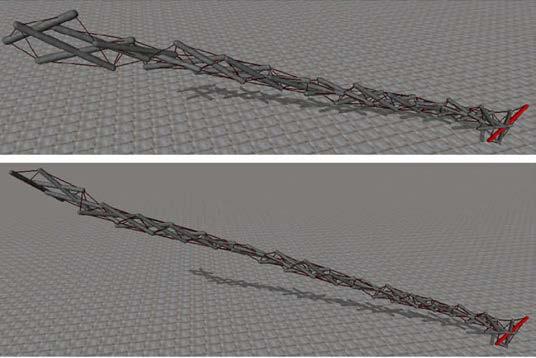
This is an attempt to formulate an evolutionary algorithm which produces large tensegrity structure. The focus of the work is primarily in developing a novel means of describing and generating the topologies of large irregular tensegrities. The process employs developmental representation [Figure 2.11]- in particular a map L-system- to grammatically "grow" a graph representing tensegrity system. Map L-system is used to grow large complex objects from a simple set of rules by operating on the edges and nodes of graphs. [2.9] This is to address issues of scalability, both in terms of representation and of performance.
In the initial stages of the algorithm, a set of rules are generated which when iteratively
re-applied to a starting graph, gradually grow the graph. These steps are repeated until the desired number of three-connected nodes is created [Figure 2.12]. Mutation and cross-over strategies by either swapping the edges or vertices are applied on the basic graph to obtain novel connections. This planar graph is then translated into a three dimensional stable tensegrity system using Open Dynamic Engine (ODE). [2.10]
From this digital process one can conclude that, the rule set has the ability to find underlying pattern of tensegrity structure and iteration of this grammar can result in iteration of those structural patterns [Figure 2.13]. Even though this process opens up a vast domain space for exploring novel large complex tensegrity structures, most of the tensegrities evolved are linear and are not developed to enclose a volume and thus has a very limited architectural application.
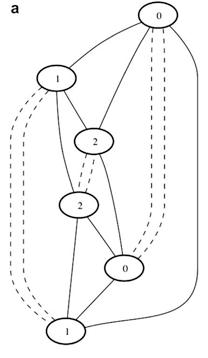
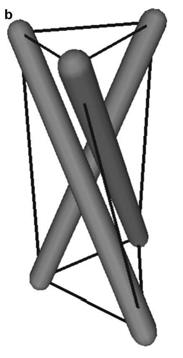
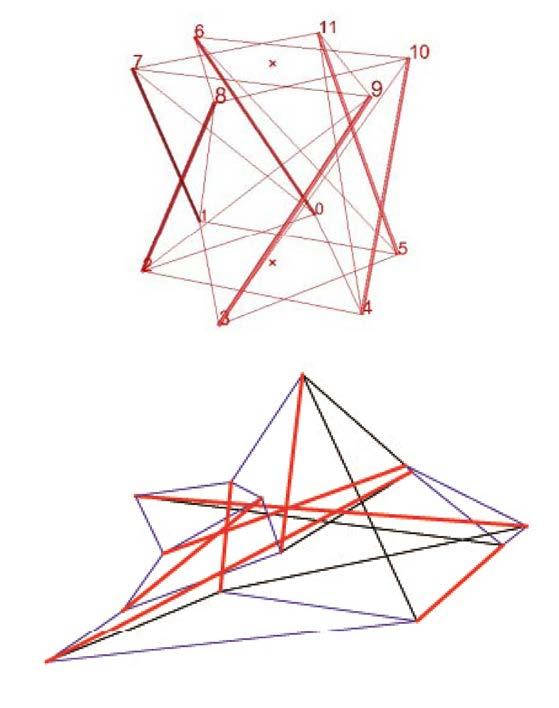
Figure 2.11 Representation of tensegrity: Each vertex corresponds to the end point of a strut and each edge corresponds to a tensile connection between endpoints. Image showing representation graph and the corresponding tensegrity structure.
Figure 2.12 Image showing growth of the connectivity graph
Figure 2.13 Image showing stages of growing complexity of a tensegrity structure and iteration of structural pattern.
2.9 Hemberg Martin, O’Reilly Una-May, 'Extending grammatical evolution to evolve digital surfaces with genr8', In: EuroGP, 2004.
2.10 Smith R. Open dynamics engine. <http://www.ode.org>.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 42
Figure 2.11
Figure 2.12
1 2 2 3 4
Figure 2.13
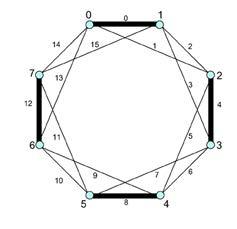
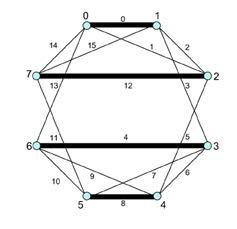

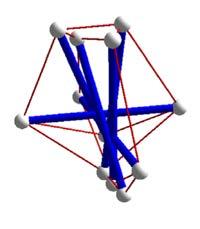
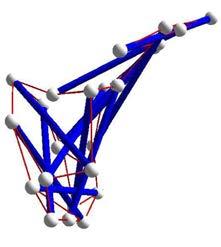
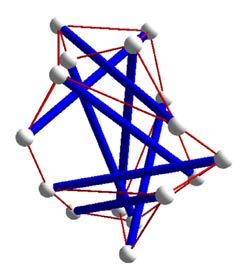
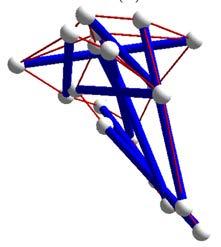
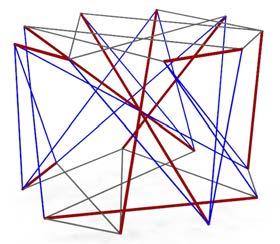
Figure 2.14 Diagram showing connection logic of the initial seed.
Figure 2.15 Image showing 2-D and 1-D structures generated on relaxation
Figure 2.16 (Clockwise) Images showing 3-D tensegrity structures evolved with 6 struts, 8 struts, 10 struts and 12 struts respectively.
Evolutionary form-finding process:
This method uses relaxation algorithm to obtain a stable tensegrity module. The genetic algorithm is used to evolve connectivity pattern and parameter values of a tensegrity structure.
This method is applicable to only Class I tensegrity structures (struts cannot share common vertices) with three cables originating from each vertex. The initial location of the vertices is used to define a 'seed' [Figure 2.14] structure which is then subjected to kinematic relaxation algorithm [2.11] to find the equilibrium state of the tensegrity structure. The connectivity pattern of the seed structure is always same.
The process is successful in exploring the space of irregular structures and give rise to new unknown configurations but in many cases, the structure would contract into a 2-D tensegrity structure on applying relaxation and in others it would collapse into 1-D bundle of struts [Figure 2.15]. Only in some cases did the structure contract in 3-D tensegrity structure. [Figure 2.16]
2.11 Lipson H., 'A relaxation method for simulating the kinematics of compound nonlinear mechanisms', ASME Journal of Mechanical Design, 2006.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 43 Methods
of the initial seed.
Figure 2.14
Figure 2.15
1 2 3 4 Initial seed (Unstable) 2-D
1-D
Figure 2.16
tensegrity structure
tensegrity structure
Classification
Connection based
Tensegrity
Geodesic
Regular morphology
X shape
Prismatic
Tensegrity polyhedra
Morphological Classification
Morphology based
Single morphology
Irregular morphology
Tensegrity circuits
The primary aim of classifying the tensegrity structures based on connection logic and morphology is to study the domain of the system, understand the properties and potential of each classified typology.
Connection based:
A. Tensegrity
B. Geodesic
Morphology based:
A. Single Morphologies
B. Assemblies
A. Single Morphologies
The next level of classification of these single modules is based on the parametric properties of the components and the connection pattern resulting in Regular and Irregular morphologies.
1. Regular Morphologies
These regular structures can be further classified based on number of struts connecting at each node. A tensegrity structure is classified as a structure of
Assemblies
Regular assemblies
Irregular assemblies
Double-X
Triple-X
Tensegrity towers
Tensegrity cloud
Tensegrity rings
class ‘k’ when it has k number of struts connecting at each node.
i. Class I : These Tensegrity structures essentially have only one strut connecting at each node and at least 3 cables. Some of the examples of Class I tensegrities are X-shape, Prismatic Regular Tensegrity Cells, Tensy-Polyhedra.
ii. Class II : These Tensegrity structures essentially have 2 struts connecting at each node and at least 4 cables. One of the example of Class II is Tensegrity circuit.
2. Irregular Morphologies
B. Assemblies
1. Regular Assemblies
i. Class I : Double-x, Triple-x, Tensegrity towers, Tensegrity cloud.
ii. Class 2 : Tensegrity rings
2. Irregular Assemblies
Figure 2.17 Diagram summarizing morphological classification of tensegrity structures. Detail description of each type is given in Appendix B.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 44
Methods
Figure 2.17
Class I Class I Class II Class II

Conclusion
As seen in the case studies and the characteristic properties of Tensegrities, it is fairly tedious and time consuming to explore the vast design space of form-finding using the conventional physical model-making methods. Hence it is vital to approach this design problem in a more scientific and specific process, using algorithmic digital generative form-finding process. This not only enables to explore and test the wide form-finding domain, but also eliminates any biased preferences, thus allowing the result to be generated through purely scientific principles. The process also helps in detailed analysis and investigation of system behaviour leading to conclusions and observations that would help in further devising processes to directly generate the desired result.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 45
Methods
Figure 2.18 Digitally generated image representing complex behaviour.
Figure 2.18
Digital Exploration
Chapter 03 : Digital Exploration
01) PRELIMINARY EXPLORATION
Parameters
Regular morphologies
Irregular morphologies
Critical analysis
02) GENERATIVE ALGORITHM
Pseudocode
Morphology generation
Evaluation stage I
Evaluation stage II
Adaptation and Optimization strategy
03) STRUCTURAL TESTS
Linear Static Analysis
Linear Buckling Analysis
04) SPATIAL EXPLORATION
Catalogue of orientations
05) CONCLUSION
This chapter describes in detail the digital process formulated based on the study and understanding of tensegrities conducted in the previous chapter. The generative process sets a base to explore limitless domain of irregular tensegrity morphologies. Numerous morphologies thus obtained are then subjected to evaluation processes and structural tests to filter the modules fitter for the architectural implementation.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 47
Digital Exploration
Governing Parameters
Strut length
Dimensions
Connection logic
Degrees of freedom
Cable length
Number of formfinding cables
Number of Non formfinding cables
Nodes fixed in X,Y,Z planes
Nodes fixed in Y,Z planes
Nodes fixed in Z plane
Preliminary exploration
Parameters
In order to understand and simulate the tensegrity system behavior, it is necessary to study the parameters that govern the stable morphology of geometry. The preliminary set of experiments intents to study the effect of variation these governing parameters have on the form and stability of tensegrity geometries. This experiment is carried out by varying component properties of the unstable basic seed geometry and consequently observing the resultant variation in the stabilized morphology.
Nomenclature
In order to document the variation of parameters, it is essential to develop a nomenclature that identifies each geometry based on its set parameters. [Figure 3.2] This further helps in comparison study of the various relaxed geometries from the same parent basic seed.
Nomenclature
8H - BS - 8,10 NODE (7-8-9)
Number
Letter - BS - NODE ( )
Number Number Number Number Number
Number of struts Basic seed ID Basic seed No. of formfinding cables No. of non formfinding cables
fixed in X,Y,Z plane
in Y,Z plane
in Z plane
Governing Parameters
The primary governing parameters of the stable form of the geometry are the component properties.[Figure 3.1] The lengths of the compressive struts and tensile cables have a definitive role in the resultant stable morphology. A slight variation in the lengths of either struts or cables results in considerable variation in the resultant stable morphology. This property is very significant in exploring the dynamism of tensegrity modules in the further research.
The elastic property of cables has a significant role in the form-finding process of stable geometries from unstable seeds. Based on the difference in their assigned elastic properties, cables are further subcategorized as form-finding cables and non form-finding cables.
Figure 3.1 Diagram listing the parameters governing the morphology of the tensegrity structure.
Figure 3.2 Diagram explaining the nomenclature.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 48
Figure 3.1
Figure 3.2
Node
Node fixed
Node fixed
(7,8,10)
Digital Exploration
Maximum volume
(8,10,12)
Similar morphologies
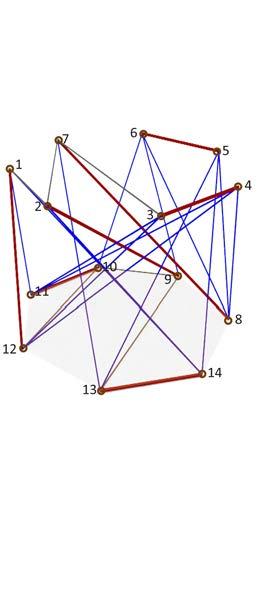
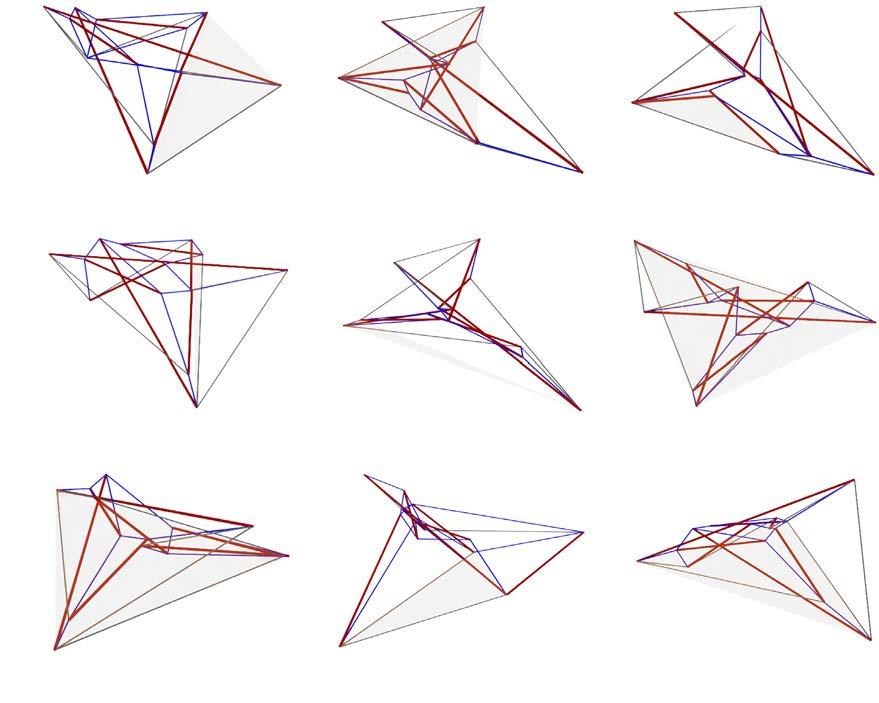
Figure 3.3 An example of an unstable 6 strut basic seed with 8 form-finding and 10 non-form-finding cables which is relaxed with 3 different set of nodes namely; node set (7,8,9); node set (8,10,12) and node set (7,10,12). Three different order of fixations for the same set of nodes are tested to obtain the relaxed state.
Unstable geometry
Node set : (7,8,10)
Node set : (8,10,12)
Node set : (7,10,12)
(7,10,12)
Figure 3.2 : It is observed that mostly varied morphologies were generated, with certain combination producing maximum volume and some combinations resulting in flattened geometries. However, sometimes different combinations resulted in similar relaxed morphologies. Further experiments also show that certain combinations failed in producing any stable form.
During relaxation process, the cables that connect to nodes vertically (connecting top plane nodes with bottom plane nodes; shown in blue) are the form-finding cables with elastic properties and the cables that connect to nodes in the same plane (connect either top nodes only or bottom nodes only; shown in black) are the nonform finding cables with non-elastic (truss like) properties.
The struts (shown in red) are also assigned non-elastic (truss-like) properties while relaxing the unstable seed. The number of elastic and non-elastic cables at each node play a crucial role in the stabilized morphology. Thus the connection logic of the basic seed is an important parameter governing stability.
The non-linear dynamic behavior of the system is also exhibited with the variation in degrees of freedom of the nodes. In order
to achieve a stable geometry from the basic seed at-least 6 degrees of freedom among 3 nodes are required to be fixed. Hence a set of 3 nodes are randomly chosen and each of the three nodes are fixed in x-y-z planes, y-z planes, and z plane respectively. Thus 6 degrees of translational motion are fixed while rotational movement is allowed. This is required so as to fix the geometry in space for relaxation and also to study the influence of fixation order on the stability and morphology of the tensegrity structure. Even changing the order of node fixation within same set of fixed nodes results in highly varied relaxed geometries. [Figure 3.3]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 49
Relaxation 6H S 8,10. 03 (C) 6H S 8,10. 03 (B) 6H 8,10. 03 (A) 6H 8,10. 01(C) 6H 8,10. 01(B) 6H 8,10. 01(A) 6H 8,10. 02 (C) 6H 8,10. 02 (A) 6H 8,10. 02 (B) 6H BS 8,10(i) 1 2 3 4 5 6 7 8 9 10 11 12 6H S 8,10. 03 (C) 6H S 8,10. 03 (B) 6H 8,10. 03 (A) 6H 8,10. 01(C) 6H 8,10. 01(B) 6H 8,10. 01(A) 6H 8,10. 02 (C) 6H 8,10. 02 (A) 6H 8,10. 02 (B) 6H BS 8,10(i) 1 2 3 4 5 6 7 8 9 10 11 12
Minimum volume
Digital Exploration
Regular morphologies
The next stage of investigation involves testing both regular and irregular morphologies under the same set up of experiment for a comparative analysis.
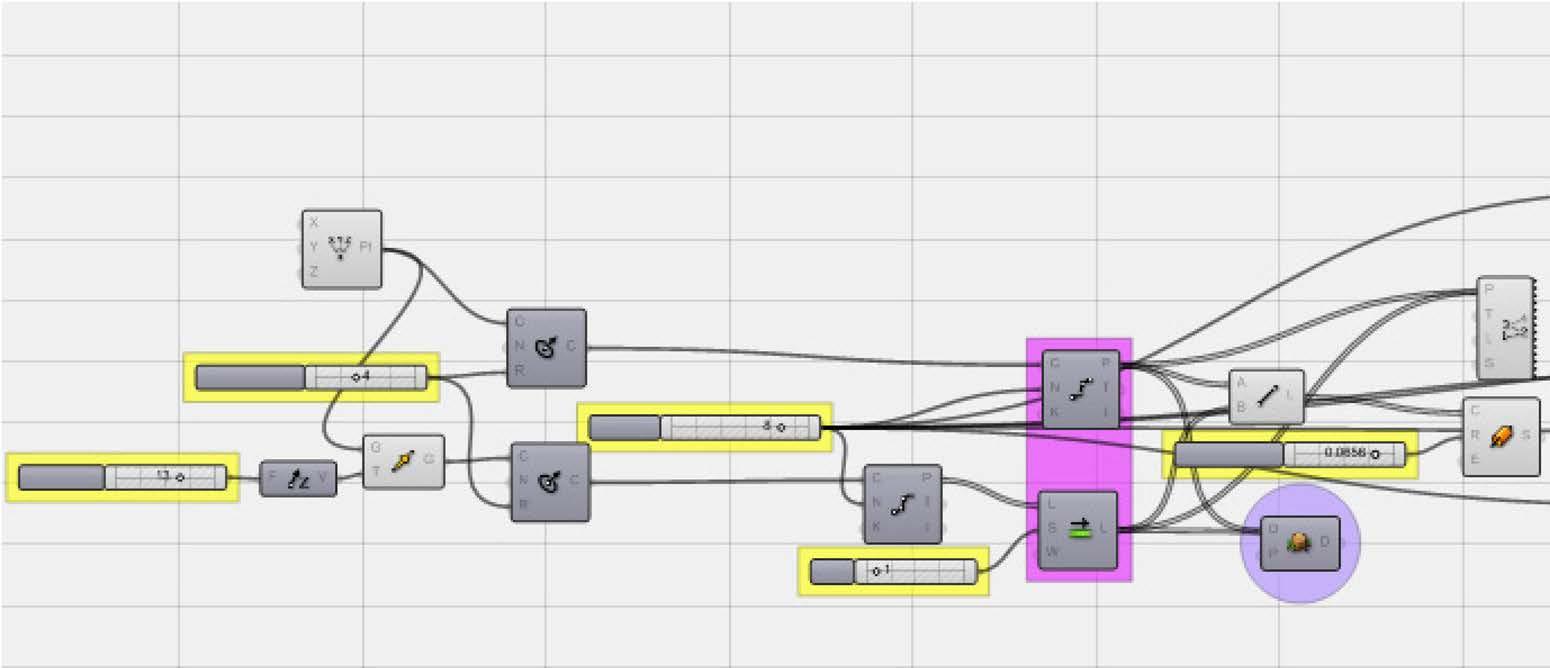
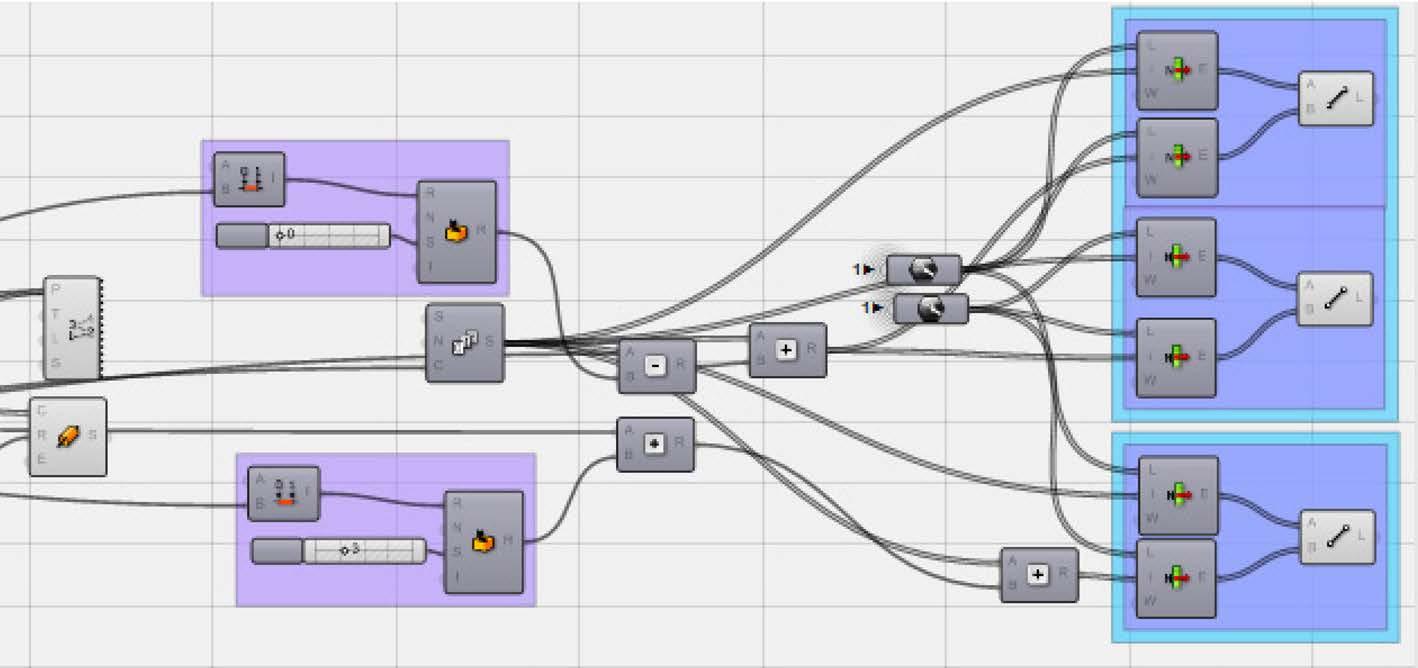
The symmetric characteristic of regular morphology implies that any variation in the connection logic and nodal degrees of freedom will not result in any variation. Hence the only varying parameter is the component dimension. As the geometry is essentially regular, the dimensions of all the component sets are proportionately varied. The digital experiment is carried by parametrically changing these component properties in Grasshopper interface of Rhinoceros [Figure 3.4] and spatial variation is physically explored using respective models of each type of regular tensegrity.
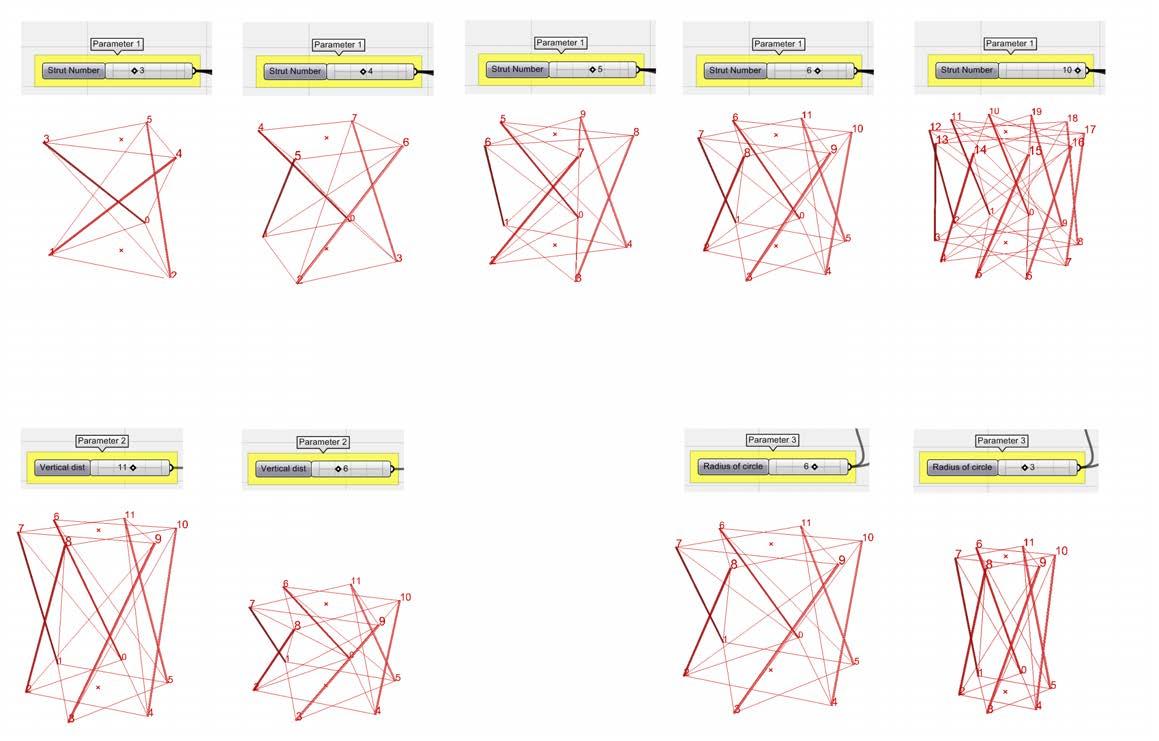
The dihedral prismatic regular tensegrities are varied in strut numbers [Figure 3.5], planar radius (which essentially was variation in lengths of non-form finding cables) [Figure 3.7], and variation in height (which was variation in lengths of formfinding cables) [Figure 3.6]. The same set of parametric experimentation is carried out for other selected regular tensegrities namely: Tensegrity rings and Truncated Polyhedral Tensegrities. (Detail shown in Appendix C)
A considerable alteration in the enclosed volume is observed in each resultant varied geometry. However, the spatial conditions and differentiation is almost non-existent as all the geometries have consistently similar morphologies.
Figure 3.4 Grasshopper (parametric) definition of dihedral prismatic regular tensegrities, exploring component variation in regular tensegrities.
Figure 3.5 Modules displaying variation in the morphology due to change in number of struts(parameter 1).
Figure 3.6 Modules displaying variation in the volume due to change in the height (parameter 2).
Figure 3.7 Modules displaying variation in the volume due to change in the base area (parameter 3).
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 50
Figure 3.4
Parameter 3: Base area
Parameter 2: Height
Parameter 1: No. of struts
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 51 Digital Exploration
Figure 3.6
Figure 3.7
Figure 3.5
Digital Exploration
3.8
Irregular morphologies
STABLE STATES
The similar experimentation set up is tested on Irregular morphologies by varying strut number from 4 strut to 9 strut. Subsequently, variation in component dimensions i.e. strut and cable length is tested for resultant morphology followed by variation in nodal connection logic and degrees of freedom. The diagrams above shows an example of the resultant variation. A detailed analytical study of these variations is listed in Appendix C. The variation is limited to one parameter at a time and is carried out in Rhinoceros, and Rhino-membrane plug-in is used for relaxation process.
Figure 3.8 Digitally obtained stable states of irregular tensegrity from a single unstable geometry by varying the component parameters.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 52
Figure
UNSTABLE GEOMETRY RELAXATION
Critical Analysis
From comparative analysis between the Regular and Irregular morphologies resulted from preliminary conclusions it is observed that regular morphologies generated proportional variation in the volumes and orientation of resultant geometries. The regular geometries are also more predictable and behave linearly as opposed to non-linear behaviour of irregular tensegrities. However, architecturally, irregularly generated morphologies could be differentiated in terms of spaces in contrast to the uniform spatial conditions of regular tensegrities. Also, the potential of creating limitlessly varied morphologies of the system provide for possibility of diverse design applications in various topological contexts. This characteristic diversity in irregularly generated modules provides potential of higher complexity and further variation when organized in different hierarchical manner.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 53
Digital Exploration
Digital Exploration
Process diagram
Basic seed generation (UnstaBle geometry)
relaxation
Figure 3.9
Relaxation Parameters
- three fixed nodes
- six degrees of freedom fixed
- assigning form-finding caBles
staBle geometry
eValUation selected staBle geometry
Evaluation criteria
- VolUme, height and Base area
- strUt and caBle lengths
- faBrication ease
adaptation and optimization
UnstaBle adapted geometry
Adaptation strategy
- rescaling of geometry
- repositioning of nodes
relaxation feedBack loop
Revised parameters
- no of nodes fixed
- reVised form-finding caBles
adapted staBle geometry
optimization
optimized geometry (fitter modUle)
Optimization criteria
- UsaBle VolUme
- Uniformity in strUt lengths
- no of groUnd nodes
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 54
Figure 3.9 Process diagram explaining sequence and stages of the digital process adopted to obtain the irregular morphologies for design application.
Figure 3.10 Diagram showing set of fixed parameters and constraints adopted for the digital form-finding experiment.
Digital Exploration
Fixed
Parameters Class Class I structures
Movement
Variation
Three fixed base nodes
Number of struts
Number of seeds
Node combinations
Nodal sequence permutation
Only one strut and three cables at each node
Six degrees of freedom fixed ( Translational vectors fixed, rotational freedom)
Min: 3 struts
Max: 9 struts
Min: 5 basic seeds
Max: 10 basic seeds
Min.: 3
Max: 5
Min.: 3 variations
Max: 6 variations
Generative algorithm
Pseudocode
Setting up a digital apparatus for the exploration of irregular morphologies is one of the key aspects of the project. Since the design domain is so wide and limitless, it is essential to fix the above listed parameters [Figure 3.10] to limit the boundaries of experiments that involved first generating a widely variant set of unstable basic seeds which when relaxed results in multiple stable states followed by evaluation and elimination process. In order to generate randomly variant initial population, a generative script is written in Rhinoscript.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 55
Figure 3.10
Digital Exploration
Step 1: Basic seed generation
inpUt = nUmBer of strUts

nodes generation
Step 2: Relaxation to obtain stable form
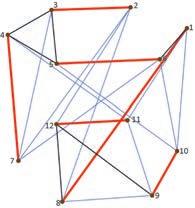
categorizing
form-finding and non form-finding caBles
STEP 1
assigning strUt properties
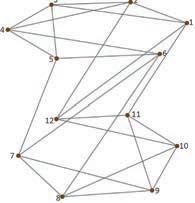
connecting links
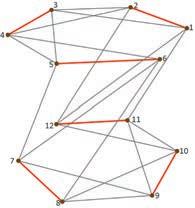
assigning strUts and caBles
assigning non form-finding caBle property
STEP 2
The first step involves generation of the unstable basic seed based on the input parameter of number of struts. Considering N number of strut is input in the script, the process generates 2N number of symmetric nodes distributed in 2 planes (each plane with N nodes) in a circular equidistant manner. These nodes are then randomly connected by 4N number of links such that each node has 4 set of links. These links are then randomly assigned component properties with the limitation of each node bearing one strut and 3 cables. The struts and cables are now randomly exchanged and shuffled without changing the limitation of number of struts and cables at each node but producing a variant basic seed morphology.
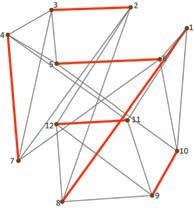
shUffling of links
Basic seed generation
assigning form-finding caBle property
The second step involves obtaining relaxed morphologies from the unstable basic seeds by firstly assigning non-elastic properties to struts and non form-finding cables, and assigning elastic properties to formfinding cables. The form-finding cables are the links connecting nodes vertically and non-form-finding cables connect the nodes horizontally in same plane. This is followed by randomly selecting set of 3 nodes and fixing these nodes in x-y-z planes, y-z planes and z plane respectively, thus fixing 6 degrees of freedom in translational motion. The basic seed is then relaxed using Rhino-membrane plug-in interface. The detail pseudocode, rhino script and the explanation of the mathematical base (Lipson method) referred for the relaxation is given in Appendix C.
fixing nodes and degrees of freedom
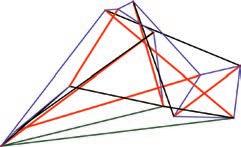
relaxed geometry
staBle form
Figure 3.11 Diagram illustrating pseudocode of the digital generative form-finding process.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 56
properties
nonelastic properties caBles
elastic properties (y,z) (z) (x,y,z)
strUts with trUss
caBles with
with
Figure 3.11
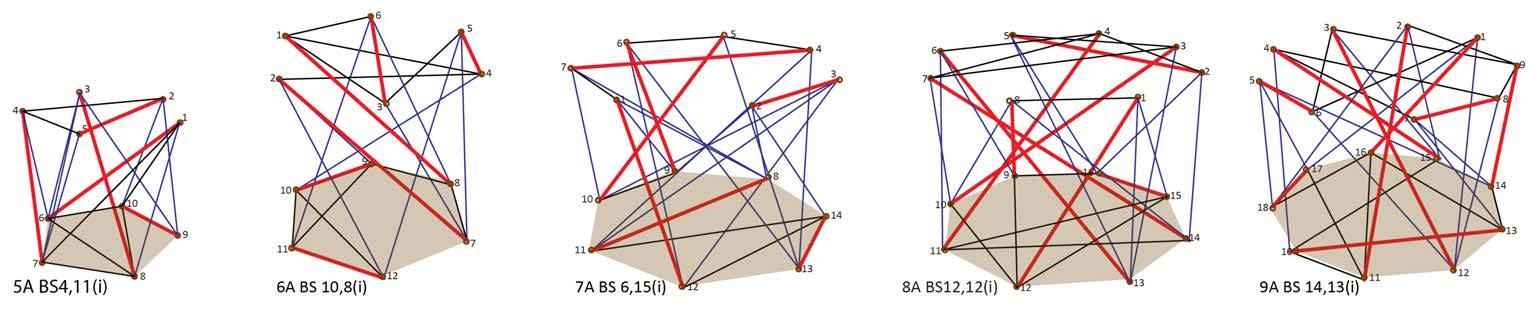
Morphology generation
Basic Unstable seed generation
Using the generative script, 40 unstable basic seeds are created with 5 struts, 6 struts, 7 struts, 8 struts and 9 struts geometries. Each basic geometry has an unique connection logic and thus produce high variation in respective relaxed modules. It is observed that 6 and 8 struts geometries have a tendency to relax into similar relaxed geometries and produce less variation while odd numbered strut geometries like 5, 7 and 9 struts produced more variant relaxed geometries. Also the number of form-finding and non form-finding cables play a crucial role in the stability of geometries. It is observed that geometries with higher ratio of the number of form-finding cables to the number of vertical struts produce lesser number of stable geometries.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 57
Digital Exploration
Figure 3.12
Figure 3.12 Diagram showing one example each of 5, 6, 7, 8, and 9 struts basic seed.
Digital Exploration
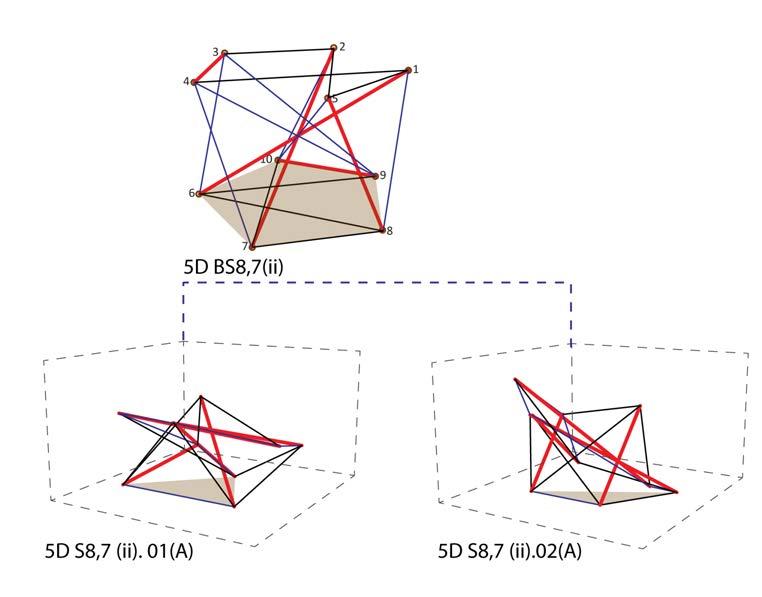
Relaxed Geometries
The 40 basic seeds produced are relaxed to generate 242 stable forms using the previously mentioned combinations and parameters. The relaxation is carried in RhinoMembrane interface by assigning elastic properties to form finding cables, and non elastic rigid properties to struts and non-form finding cables after fixing at least 3 nodes in 6 translational vectors. Examples of three different seeds are shown where each seed produces varied number of stable relaxed forms based on the geometry and connections. There are certain seeds which failed to produce any stable morphologies [Figure 3.15]. Detail documentation of each of these 242 stable geometries is shown in Appendix C.
Figure 3.13 A five strut basic unstable seed and its respective stable relaxed morphologies.
Figure 3.14 An eight strut basic unstable seed and its respective 12 stable relaxed morphologies and 3 unstable conditions.
Figure 3.15 A seven strut basic unstable seed which failed to produce any stable morphologies due to its high number of elastic form-finding cables and less vertical struts.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 58
Figure 3.13
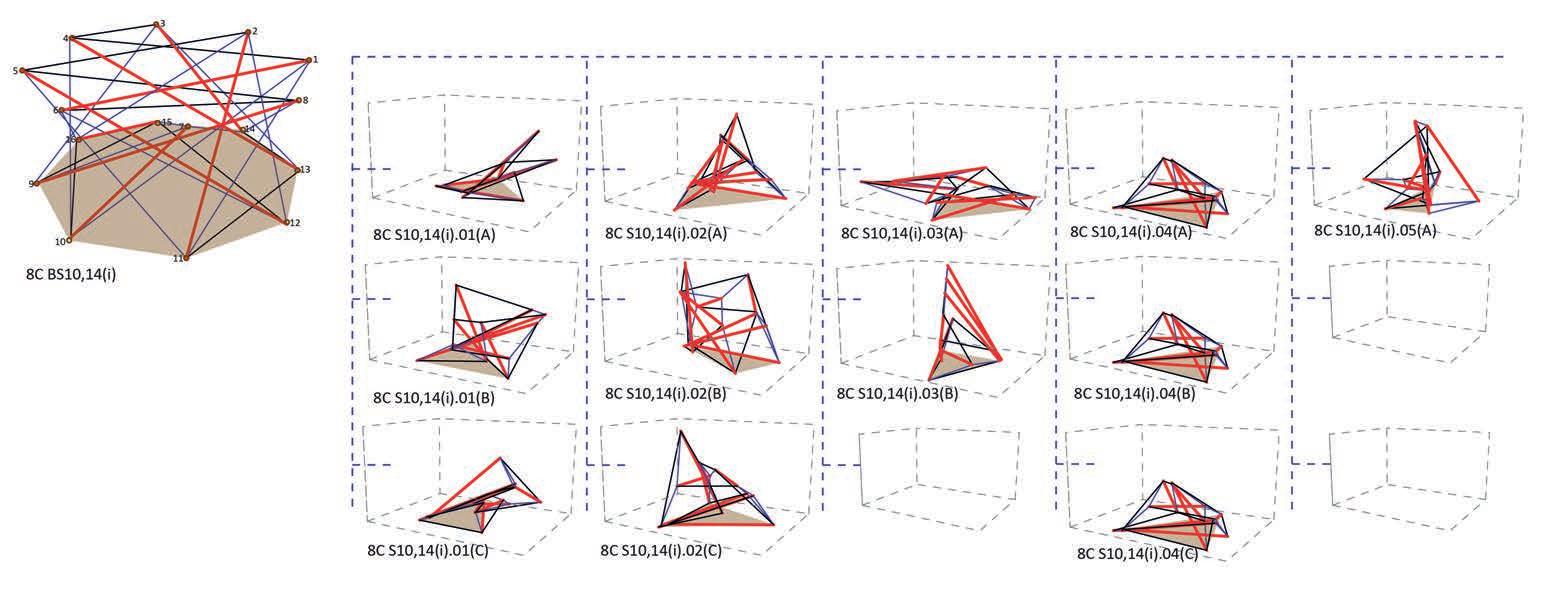
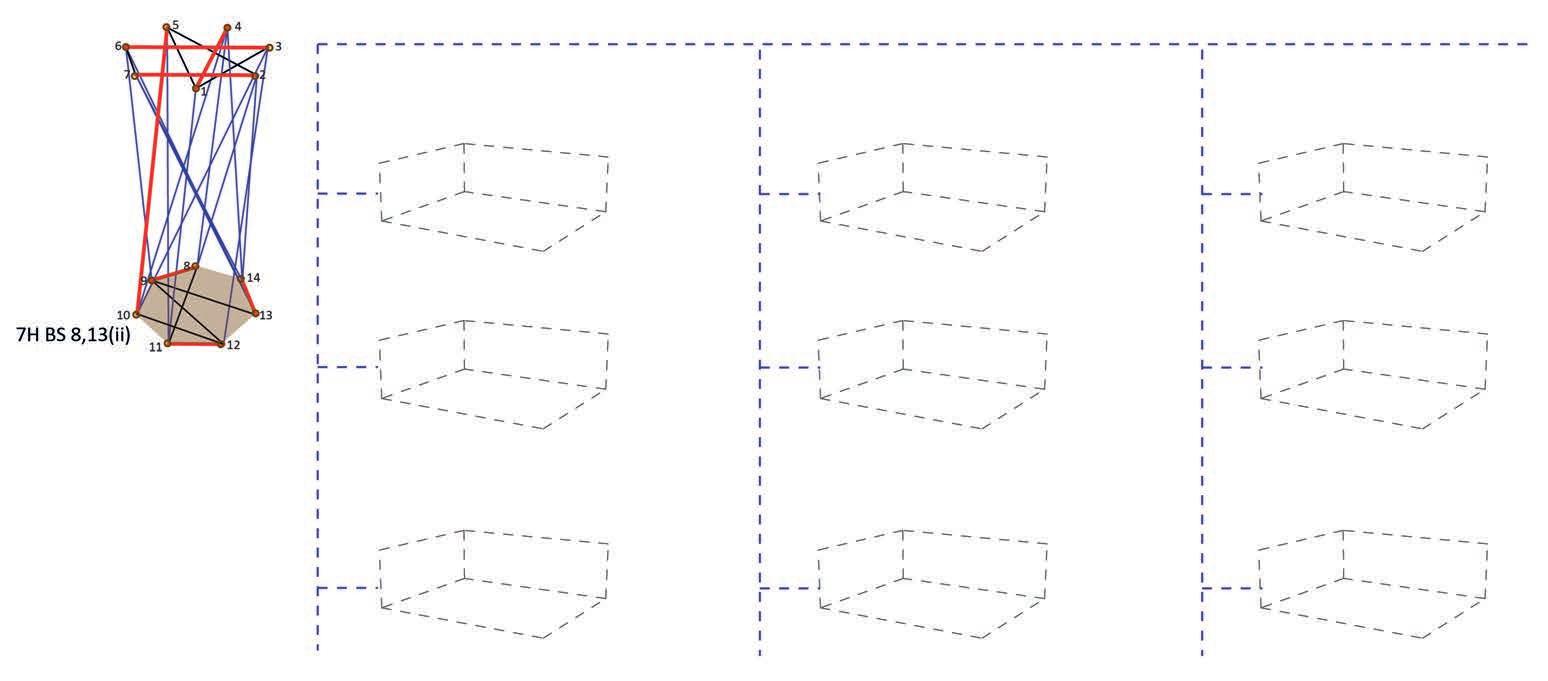
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 59 Digital Exploration
Figure 3.14
Figure 3.15
Digital Exploration
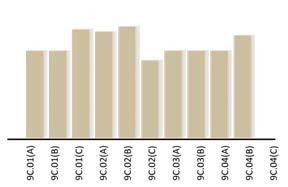
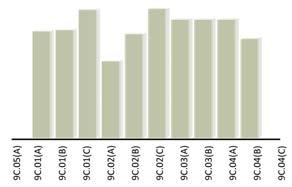
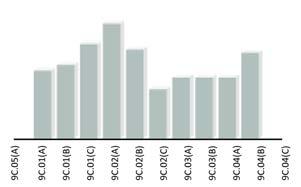
Evaluation stage I
Volumetric evaluation
The first stage of evaluation is aimed at eliminating architecturally unusable geometries that enclosed very less volumes or had less clear heights. Hence each of the geometries is evaluated for the enclosed volume, base area and clear height. Each of the respective data is graphically plotted [Figure 3.16] in order to have a comparative analysis and elimination procedure. The geometries with maximum enclosed volume, larger base area and higher clear heights are selected thus eliminating the flatter, condensed and contracted unusable geometries. The evaluation of 242 relaxed modules resulted in selection of 20 usable geometries [Figure 3.17] which are further evaluated in next stage. Detail evaluation of all the geometries is shown in Appendix C.
Figure 3.16 An eight strut basic unstable seed and its respective relaxed morphologies along with the evaluative comparative graphs of volume, area and height of each of the relaxed geometries.
Figure 3.17 The set of 20 chosen morphologies after the first stage of evaluation.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 60
VOLUME AREA HEIGHT
Figure 3.16

RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 61 Digital Exploration
Figure 3.17
Digital Exploration
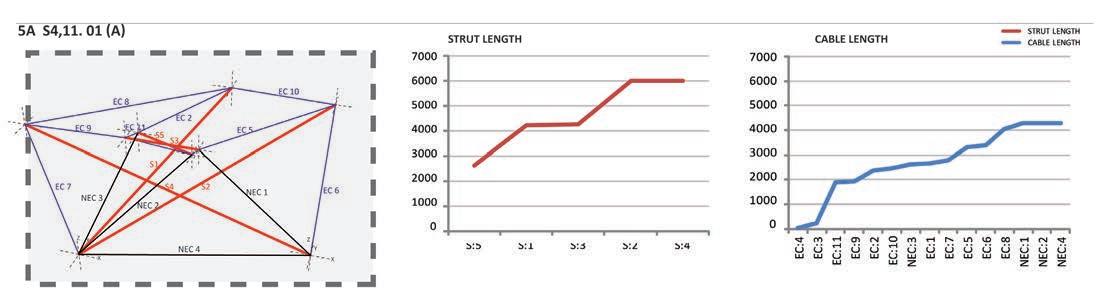
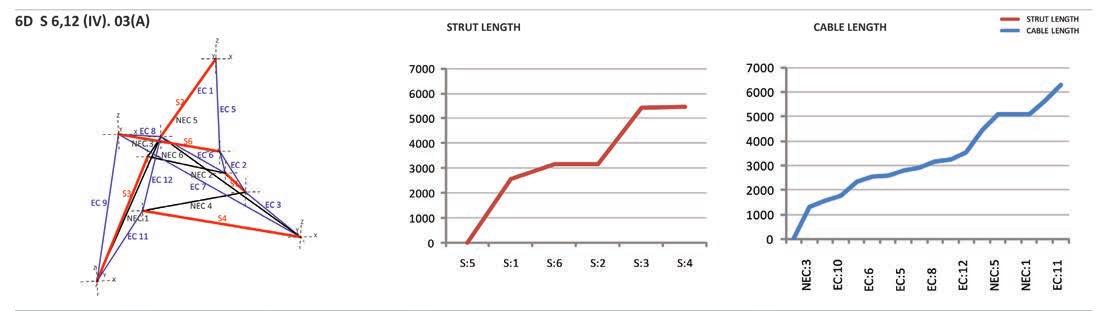
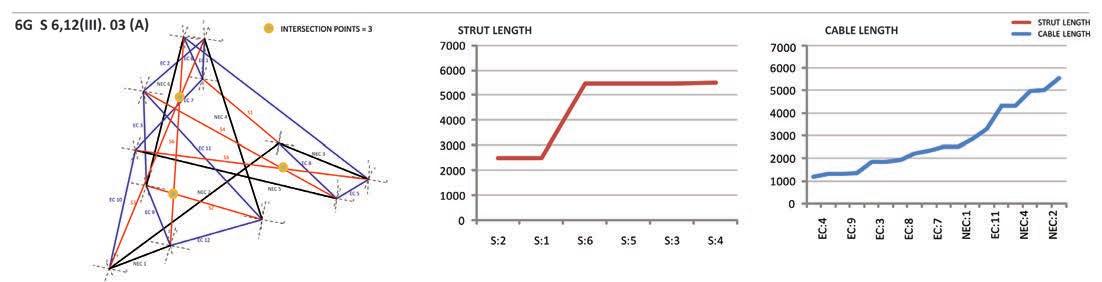
Evaluation stage II
Fabrication based evaluation
The second stage of evaluation intents to assess the fabrication ease of the modules. The first step involves eliminating geometries [Figure 3.18] with intersecting struts as it is structurally not feasible to fabricate. This is followed by evaluation for uniformity in component dimensions for fabrication ease. In order to assess this regularity in lengths of struts and cables, values for each strut and cable length is plotted graphically. A flatter line graph implies higher uniformity in component
dimensions. The graph showing relative strut and cables lengths for each of the twenty geometries is plotted, and each geometry is ranked based on fitness criteria (uniform components) [Figure 3.19]. This procedure helps in retaining economically buildable modules and eliminating geometries with too many varying strut and cable lengths. The six selected modules [Figure 3.20] are then subjected for further structural tests and analysis. A detailed documentation of the second stage of evaluation is listed n the Appendix C.
Figure 3.18 Example of three geometries along with the second stage evaluative graphs of strut lengths, cable lengths and intersection points of the struts.
Figure 3.19 Comparative evaluative graphs of strut lengths and cable lengths of each individual morphology and their ranking.
Figure 3.20 Selected six modules after second stage evaluation.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 62
strUt no strUt no. strUt no caBle no caBle no. caBle no length ( mm ) length ( mm ) length ( mm ) length ( mm ) length ( mm ) length ( mm )
Figure 3.18
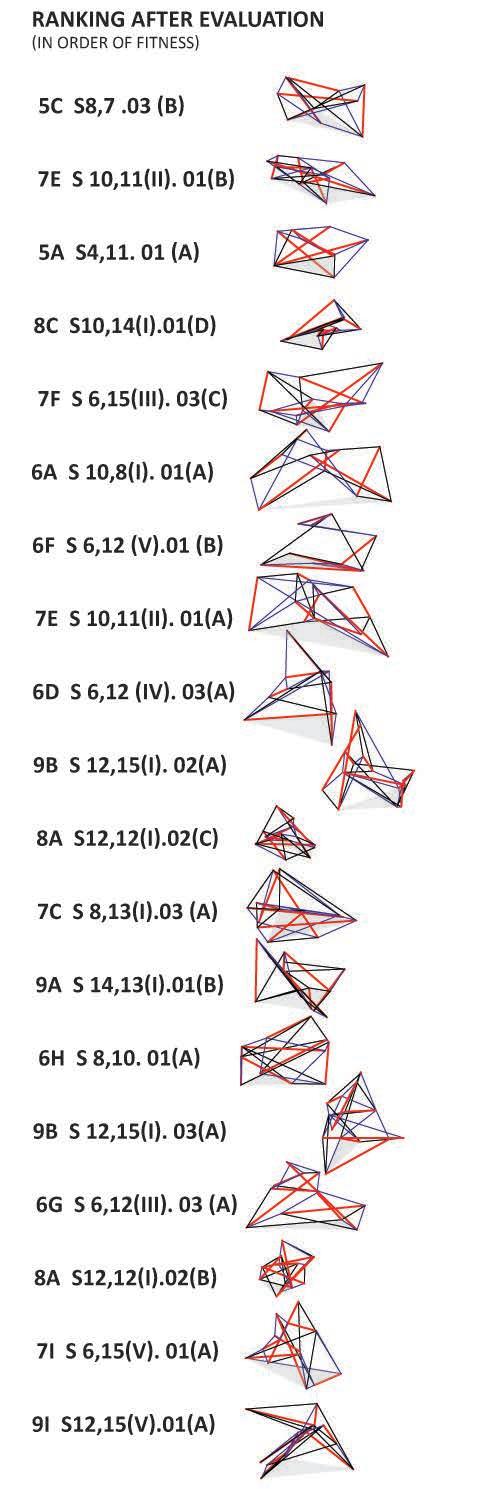
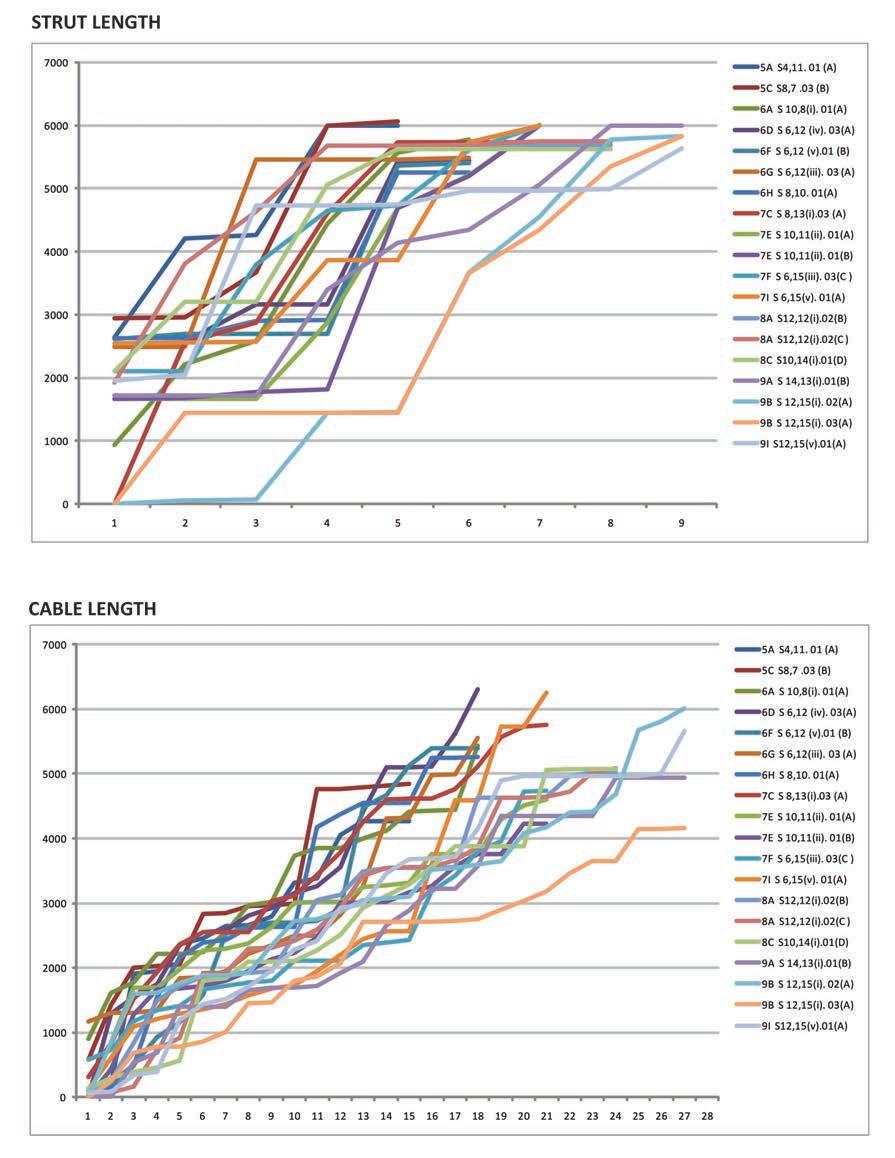

RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 63 Digital Exploration
Figure 3.19
Figure 3.20
strUt no
length ( mm ) length ( mm )
caBle no
Digital Exploration
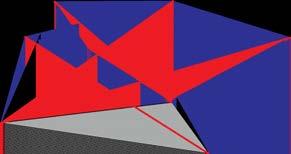
mUtation ichange in nUmBer of groUnd nodes
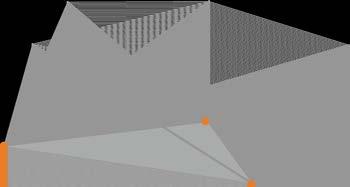
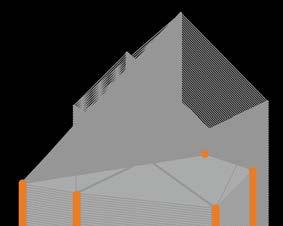
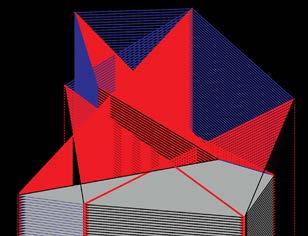
mUtation ii - change in nUmBer of formfinding caBles
Adaptation and optimization process
The generative tool developed so far is generic with set rules such as fixed number of ground nodes and a set procedure to assign form-finding cables. After critically analyzing the morphologies obtained through the process and also the system behaviour, it can be concluded that the two set parameters: ground nodes and form finding cables, play the most important role in the generation of the stable morphology.
It is also observed that, in most of the morphologies obtained, the height to base area ratio is very high resulting in less availability of clear space. Secondly, since the input of the process is a random unstable basic seed, there is no control on the component dimensions giving results with highly varying strut and cable lengths.
Thus, an adaptation and optimization strategy is formulated to equip the digital process so as to generate morphologies
optimized as per the design requirement.
The first step of the optimization process involves, change in the number of ground nodes. This is followed by changing the number of form-finding cables. Once the mutated unstable geometry is obtained as per the requirement, the struts and cables are re-assigned properties followed by fixing all the ground nodes at least in the (z) axis. The mutated unstable geometry with the assigned values is then relaxed to obtain a stable morphology. [Figure 3.21] This process enables the generative tool and the user to control the strut lengths and also to optimize the spatial quality of the form thus generated.
This process is carried out on the six selected modules in Evaluation stage II to obtain six optimized stable geometries to be used for the design application. [Figure 3.22]
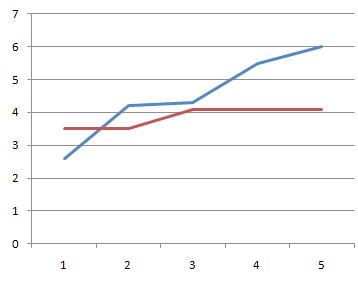
Figure 3.21 Diagram explaining the adaptation and mutation strategy through an example of a five strut selected module after evaluation stage II.
Figure 3.22 Selected six modules after the adaptation and optimization process.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 64
Figure 3.21
5 strUt relaxed modUle
relaxation
mUtated staBle modUle
comparison graph of strUt lengths
inpUt modUle groUnd nodes = 3
inpUt modUle no. of form finding caBles = 9
mUtated UnstaBle modUle groUnd nodes = 5
mUtated UnstaBle modUle no. of form finding caBles = 6
inpUt geometry l ength ( m ) oUtpUt geometry V
nUmBer
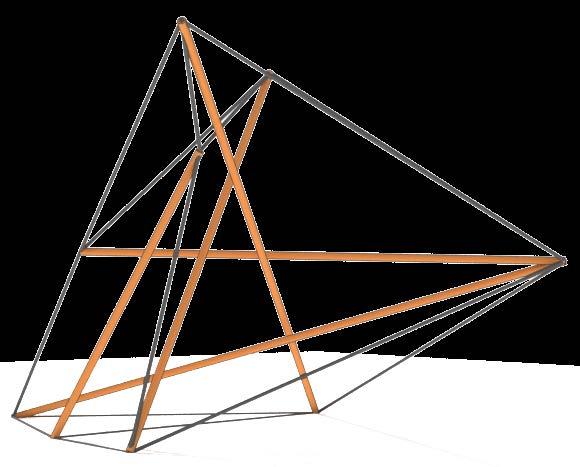
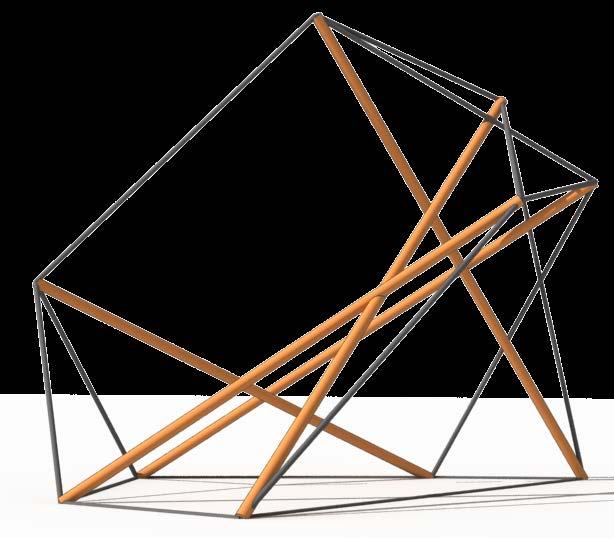
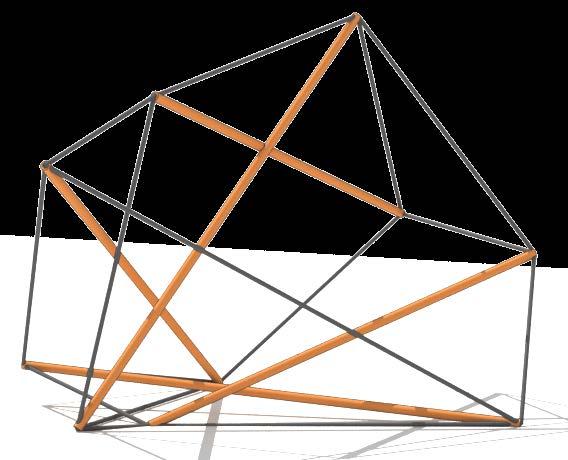
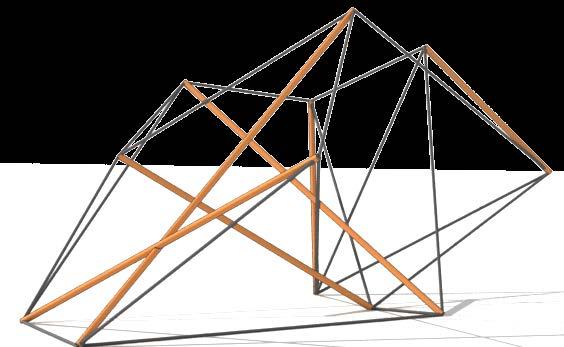
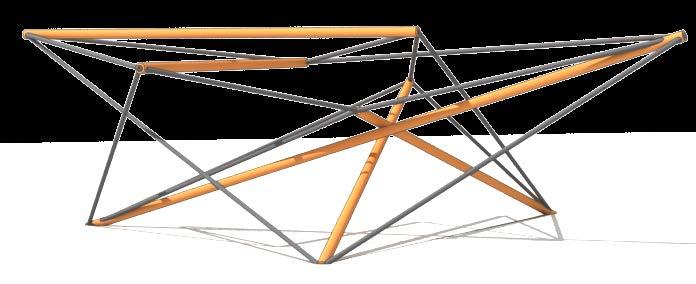
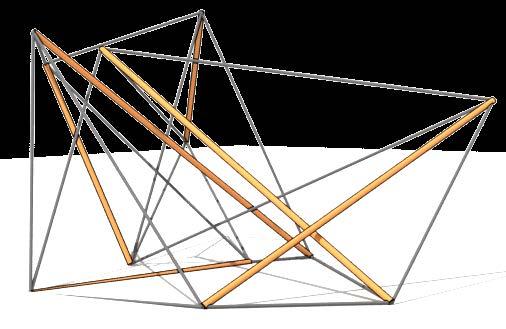
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 65 Digital Exploration
Figure 3.22
Digital Exploration
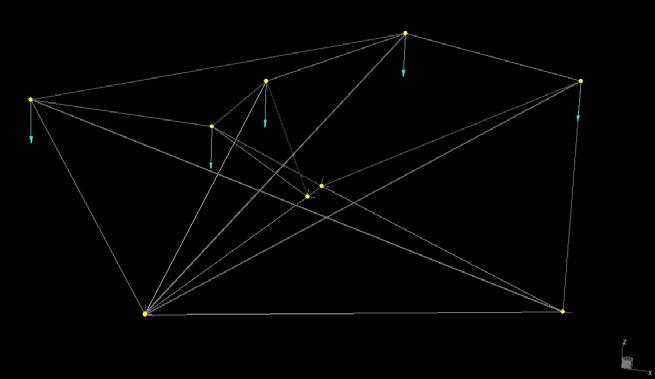
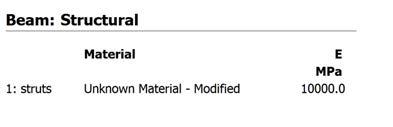
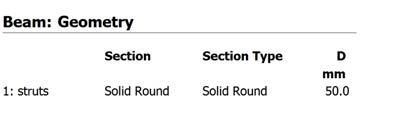

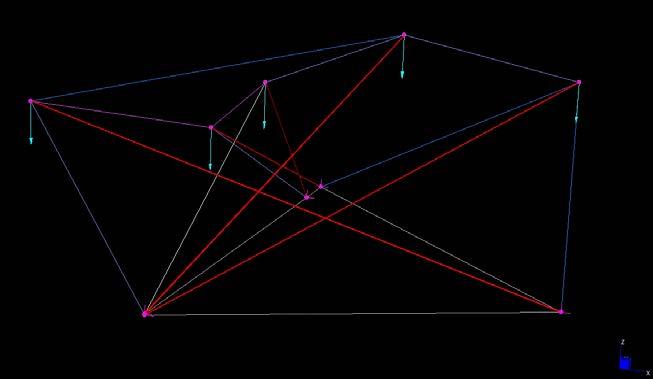
Structural tests
Structural Analysis in Strand is carried out for the selected modules to simulate the deflection of the nodes and the buckling threshold of the struts under the assigned load and to get the appropriate dimensions of the components.
For the digital setup, Struts are assigned as beams with elastic modulus of 1000 MPa. Cables are defined as springs with axial stiffness of each cable is inversely proportion to its length according to the relation “Axial Stiffness = (alpha / length of the cable)”.
Based on the geometry, minimum three nodes are fixed on the ground in the translational x, y and z axis keeping the rotational movement free. The other nodes are subjected to a load of 1000 N in the (-z) direction.
Each module is tested for three strut crosssection diameter value viz. 20mm, 50mm and 75mm and under three load cases with varying pretension values of 0.02, 0.01 and 0.001 in the tension cables.
Figure 3.24 Strand setup showing node constraints and loads.
Figure 3.25 Strand setup after assigning strut and cable properties.
Figure 3.26 Table showing assigned strut and cable properties in strand for structural evaluation.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 66
Figure 3.24
Figure 3.26
fixed nodes nodes sUBjected to Vertical load
Figure 3.25
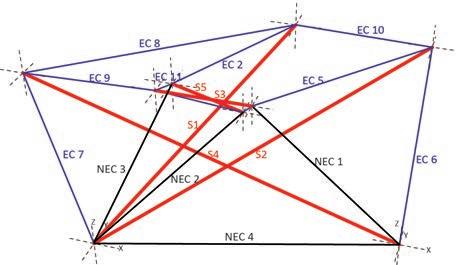
3.27 (left to right) Images showing selected five strut module and its Linear Static Analysis in strand 7 interface.
Digital Exploration
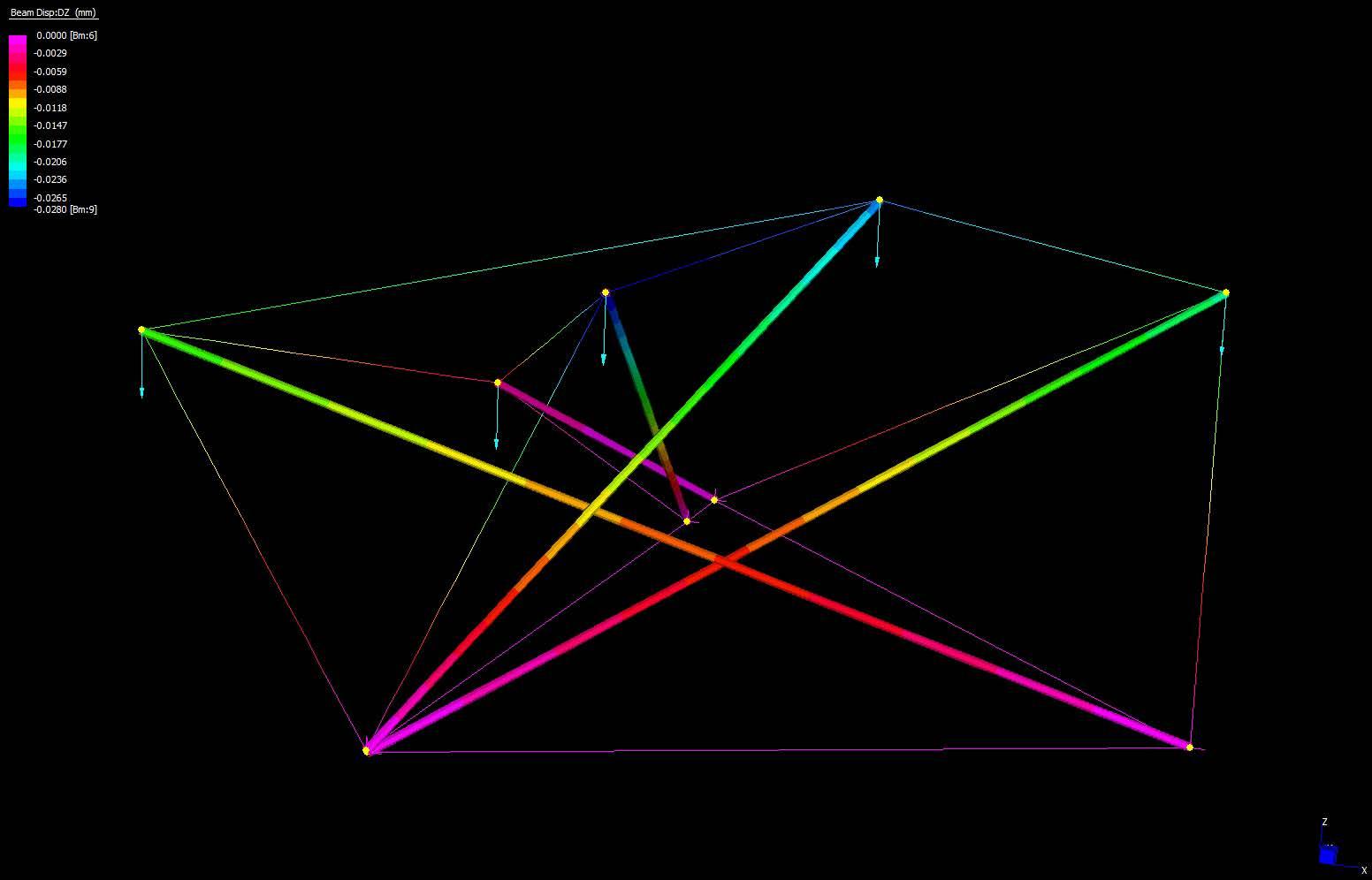
Linear Static analysis
Linear Static Analysis (LSA) and Linear Buckling Analysis (LBA) is carried out for all the nine different combinations of Strut Diameter and the Pretension in the cables.
LSA is carried out to study the deflection in the geometry caused due to the designed load and LBA estimates the Load at which the struts will begin to buckle and is governed by the strut diameters.
Based on the inferences of the experiments [Figure 3.27], the final strut geometry and cable pretension value is decided. In certain cases to get the desired stability for the designed load, combinations of different strut dimensions is explored. This exercise helps in classifying the geometries based on their structural stability and load bearing capacity.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 67
Figure
Figure 3.27
Digital Exploration
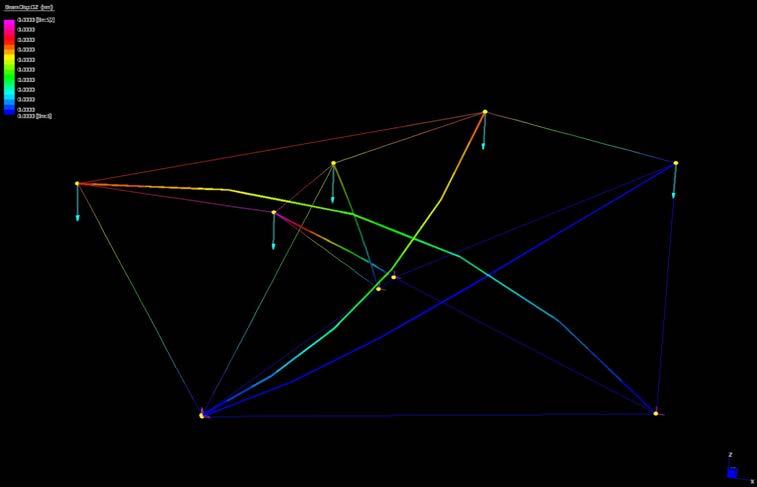
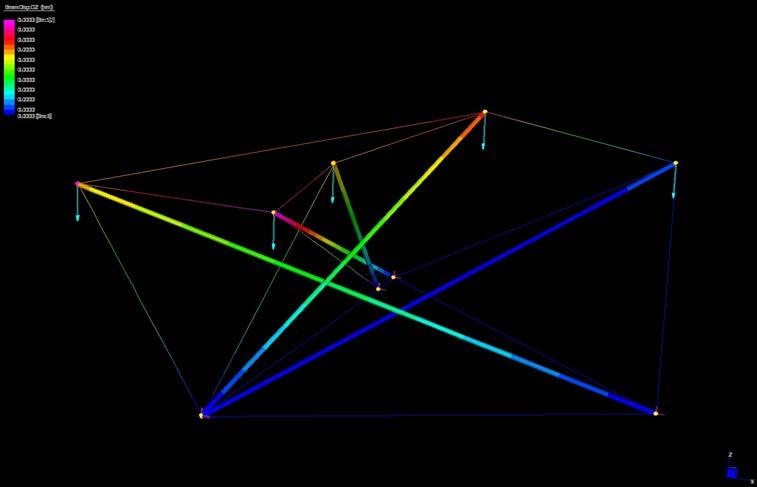
Linear Buckling analysis
The structural analysis is done where the buckling loads for the structure is calculated. In the initial tests, the buckling load is lower than the required design load [Figure 3.28] and hence the struts are redesigned by changing their diameter in order to increase the strength of the structure and to ensure stability under critical load of 1000N [Figure 3.29].
Figure 3.28 Initial linear buckling analysis result showing module buckling under the desired load.
Figure 3.29 linear buckling analysis result after redesigning the struts showing no buckling under the desired load.
Figure 3.30 Linear buckling tests for the selected modules showing their respective buckled and stable conditions.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 68
COMPONENTSMaterialModulus (N/ SQ MM)Diameter(MM)LOAD(N)PRETENSION STRUTSWood 1e + 4 50 10000.01 CABLESSteel 2.1e + 8 8 COMPONENTSMaterialModulus (N/ SQ MM)Diameter(MM)LOAD(N)PRETENSION STRUTSWood 1e + 4 20 10000.01 CABLESSteel 2.1e + 8 8
Figure 3.28
Figure 3.29
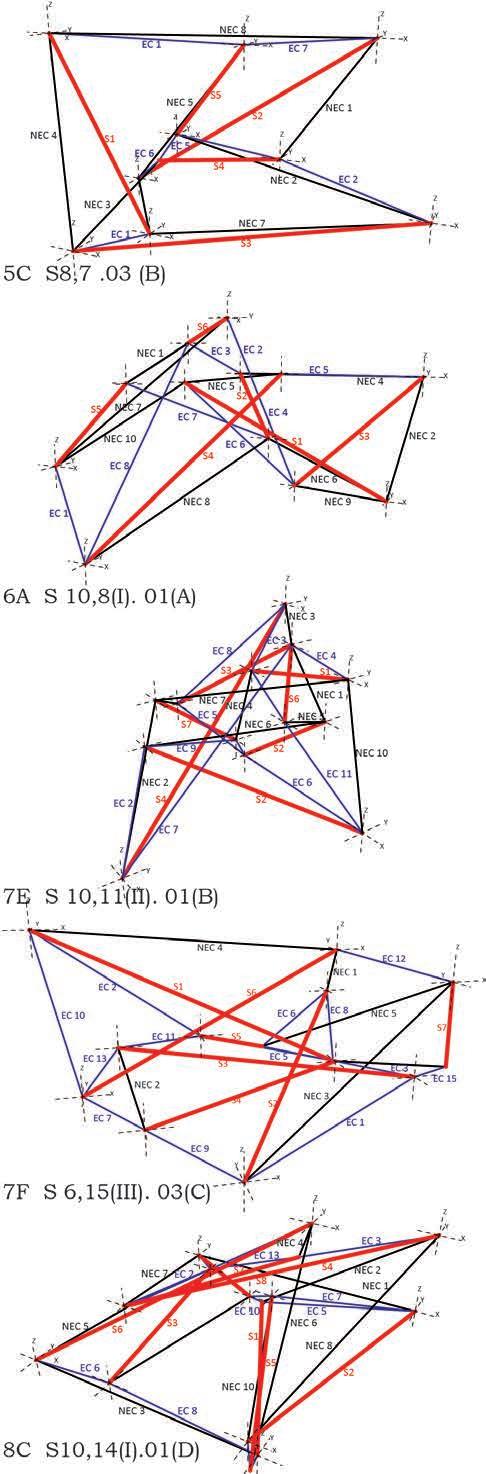
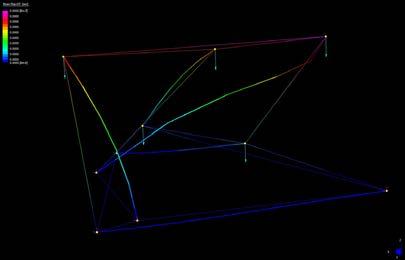
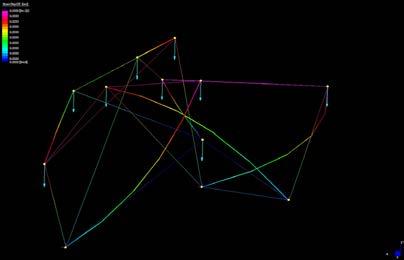
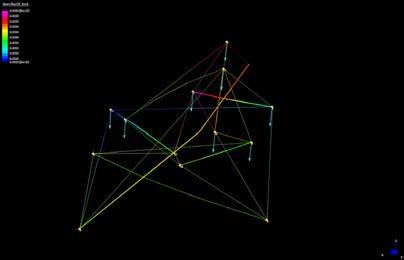
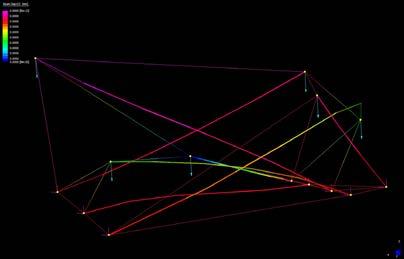
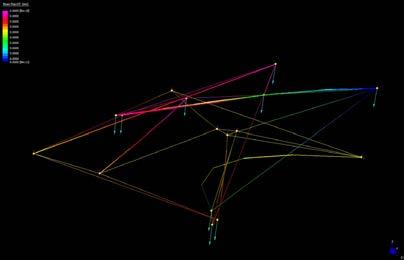
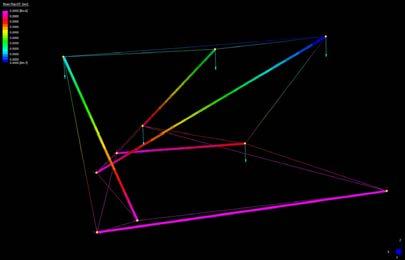
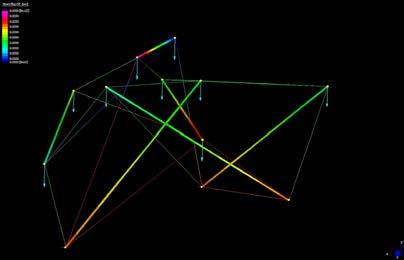
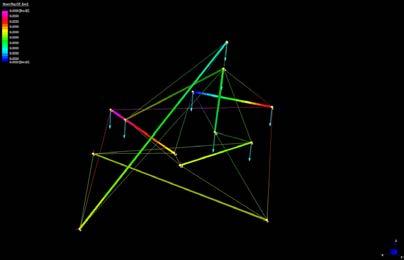
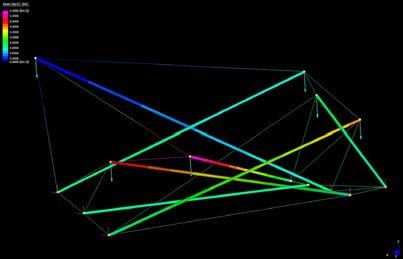
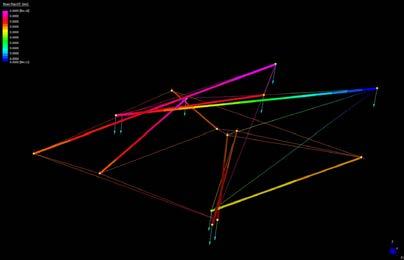
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 69 Digital Exploration
Figure 3.30
Digital Exploration
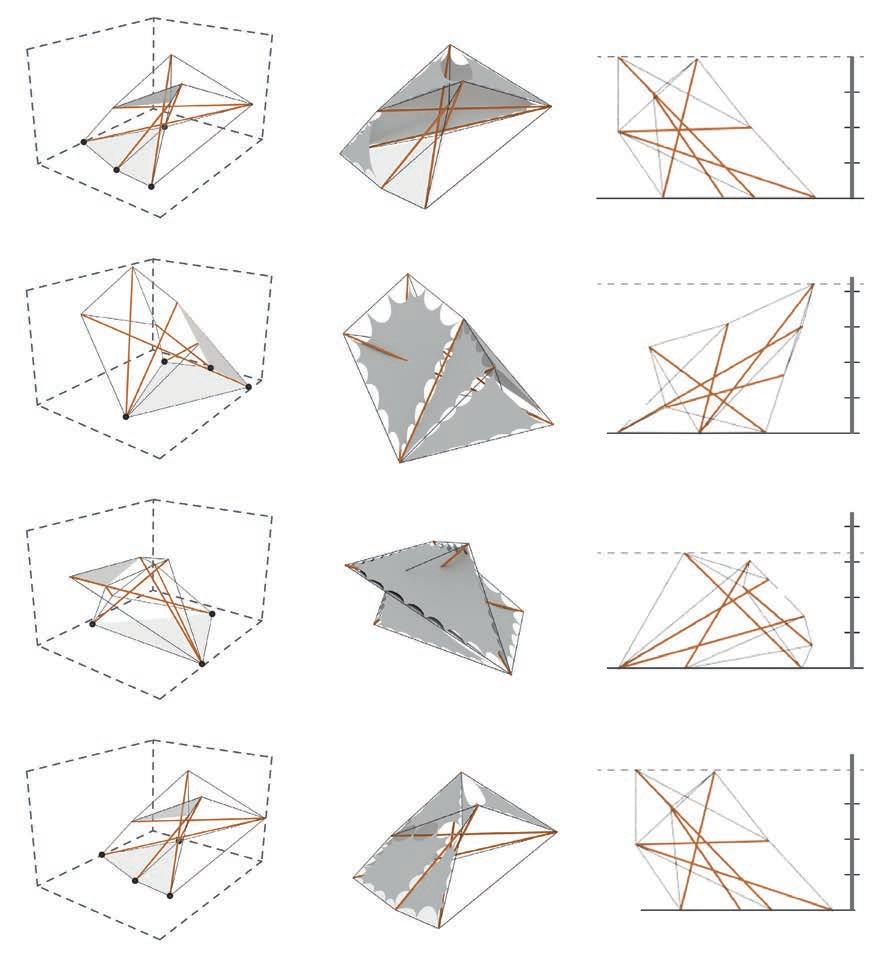
Spatial exploration
Catalogue of orientation
Multi- orientation stability
One of the most unique properties of tensegrities is the ability to retain its stable form in any position and orientation irrespective of external forces. This ability of tensegrity modules coupled with ability to inherently display differentiation in spatial qualities due to irregularity results in generating series of variation of spatial qualities and architectural conditions by merely orientating the same module in different ways. In order to explore this spatial variation potential of each of the modules, an exercise of cataloguing different orientation for each of the selected six modules is carried out. The cataloguing exercise helps in comparing each orientated module for its differentiation of enclosed, semi-enclosed and covered spaces.
3.31 Diagram showing a five strut selected module along with its different orientations and their spatial variation.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 70
Figure
orientation a eleVation eleVation eleVation height ( m ) 0 1 2 3 4 height ( m ) 0 1 2 3 4 height ( m ) 0 1 2 3 4 height ( m ) 0 1 2 3 4 eleVation orientation B orientation c orientation d
Figure 3.31
Digital Exploration
Conclusion
From the spatial exploration of the modules obtained through the digital process, it can be concluded that with one single module numerous variations in the spatial differentiation could be obtained. This implies that with the same component dimensions and their connection logic, units with varying spatial and functional requirements can be designed. Thus, with irregular tensegrities new domain of designing units that are modular in their fabrication logic but can be spatially modulated to suit the design requirements can be achieved.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 71
Chapter 04 : Site
01) ANDAMAN NICOBAR ISLANDS – AN INTRODUCTION
Geography and Climate
Demography
Tsunami 2004
02) TRADITIONAL ARCHITECTURE OF A&N ISLANDS
Housing typology
Social Organization: Tuhet Planning
03) EXISTING TEMPORARY SHELTERS
Provided Design
Impacts of the provided design
04) CONCLUSION
This chapter describes in detail the site selected for testing the developed system. The preliminary section begins with a set of introductory data of the site – Andaman and Nicobar Islands and lists down the site specific concerns that need to be addressed while developing the design. It is followed by studying the traditional housing typology and the existing social pattern which informs the design process to adapt accordingly. A critical analysis of existing temporary shelters provided to the 2004 tsunami victims is carried out to understand the shortcoming and its consequences – economic, environmental and sociocultural. This enables to conclude with an explication of the design aim of this research work.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 73
Site

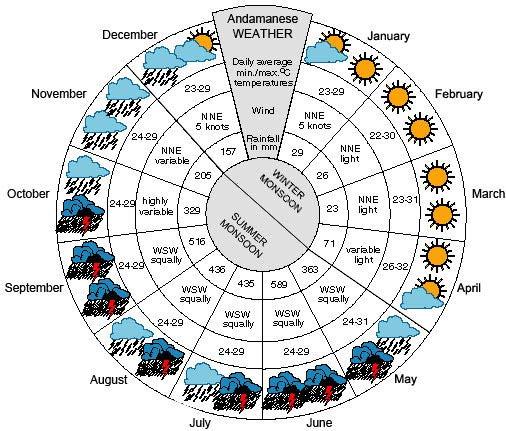
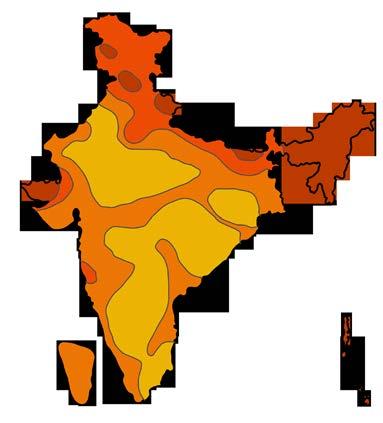

zone V zone IV zone III zone II
Geography and Climate
Andaman and Nicobar Islands – a Union territory of India - are a group of archipelagic islands located a thousand kilometre away from the mainland in the Bay of Bengal. It consists of 306 islands and 206 rocks, covering an area of 8200 sq.km [Figure 4.3]. Sumatra, the closest land mass is 145 km away from the Nicobar group of islands at the southern end. Myanmar, the nearest landmass in the north is 240 km. Andaman and Nicobar Islands lie in the Pacific Ring of Fire. They are separated by the 100 Channel where many cyclones and hurricanes originate and travel towards mainland India. There are two volcanic islands- Narcondum and Barren. These islands also come under seismic Zone V. [Figure 4.2]
The Islands situated in the equatorial belt have a tropical climate which is warm and humid: hot in summer and warm in winter. The temperature ranges from 180 C to 350C. It receives rainfall from both the Northeast and the Southwest monsoons, with average rainfall in the range of 3000 to 3500 mm.
[Figure 4.4]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 74
Andaman Nicobar Islands – An introduction
Figure 4.1 World may showing the location of Andaman and Nicobar Islands.
Figure 4.2 Map of India showing seismic zones. Note A & N Islands lie in zone V.
Site
Figure 4.3 Map of Andaman and Nicobar Islands.
Figure 4.1
Figure 4.4
A & N Islands
Figure 4.2
Figure 4.3
North Andaman
Middle Andaman
Lower Andaman
Little Andaman
Car Nicobar
Little Nicobar
Great Nicobar N
4.5 Map and images showing distribution of various tribes in Andaman and Nicobar Islands.
4.1 Desai Rajendra, Jadeja Dharmesh, Rawal Vivek, ‘Assessing Post Tsunami Housing Reconstruction, In Andaman & Nicobar Islands: A People’s Perspective’, 2006.
4.2 Integrated Design, Evaluation report on housing and reconstruction model in A & N Islands proposed by Town and Country Planning Organization, New Delhi.
The Andaman and Nicobar Islands are of great anthropological significance. An archipelago of 570 islands with just 36 inhabited islands, A & N is home to ancient hunter-gatherer tribes that date back over 60,000 years. Indigenous tribes in the Andaman are Great Andamanese, Onges, Jarawas and Sentinelese, while the Nicobar group of islands are home to the Nicobarese and Shompens. [4.1]The total population of A & N Islands, according to 2001 census is about 4, 00,000 out of which the tribal population in the islands is 26,825.



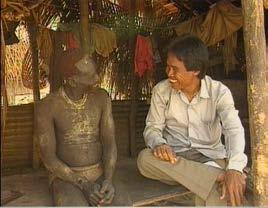
Demography
The entire Nicobar has been declared as a tribal reserve. Nicobarese are the single most important group living in this area and are the most populous of all the tribal groups of A & N Islands. They live on 11 islands of the Nicobar group and in Little Andaman. Two-thirds of the Nicobari population lives in Car Nicobar, the northern most island of the Nicobar group. [4.2]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 75
Figure
Jarawas
Nicobarese
Shompen
Site
Sentinelese
Figure 4.5


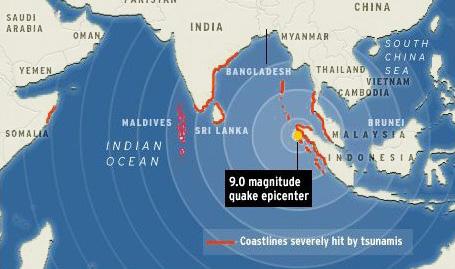
Tsunami that occurred on 26th December 2004, affecting 11 countries and causing nearly 230,000 deaths, is the most devastating tsunami in the recorded history. Andaman and Nicobar Islands were also devastated by earthquake and this subsequent tsunami.
The southern-most parts of this narrow archipelago spread over 800 km in the Bay of Bengal were affected the most. Numerous aftershocks [Figure 4.8] were also reported off these islands in the hours and days that followed. Official reports mention more than 3500 persons as dead or missing and 9714 families having lost their homes. A total of 14,000 dwelling units were damaged.


Figure 4.6 Image of the destruction caused by the
Figure 4.7 Map marking the epicentre of the Tsunami and the coastline affected by it.
Figure 4.8 Map showing aftershocks following the Tsunami affecting the Islands.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 76 Site
Tsunami 2004
Figure 4.6
Figure 4.7
Figure 4.8
Tsunami.
4.0-5.9 6.0-6.9 7.0-7.9 Volcanoes Earthquakes



Traditional Architecture of A&N Islands
Housing typology
4.9 Images of traditional housing typologies of Andaman and Nicobar Islands. Note the variation in the roof morphology and the construction material used.
The traditional housing typology in the islands have evolved not only based on the materials locally available but are also result of their lifestyle, occupation and financial capacities. For example, a non-tribal housing differs from the tribal housing; house of a farmer varies from that of a fisherman. Thus, there are variations that suit every household’s own context and need.
Understanding the housing typology of the tribal group is essential to deliver designs based on their functional needs and cultural values. This community has always lived in close proximity and harmony with the sea in traditional housing typology called ‘Machaan’.
Construction Technology and material used:
• A traditional ‘Machaan’ house is built of wood and is on stilts of about six feet height.
• The woods used are: ngang, tachu-roi, bamboo, coconut, areca nut.
• Timber planks on the inside and thatch on exterior or bamboo mats mounted on wooden posts are used for walls. They both have high insulating properties.
• Bamboo or timber is used to construct ventilated flooring.
• The roof is generally thatched and insulates well against heat. All roofs are pitched, generally four-sided, sometimes two, to withstand heavy rainfall.
• Another variation in the morphology of the roof can be seen in the typical Nicobari hut. It is a semi-spherical thatch roof covering the side walls also.
• In tribal communities, the required skills to work with timber, bamboo are available in abundance.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 77 Site
Figure 4.9
Figure
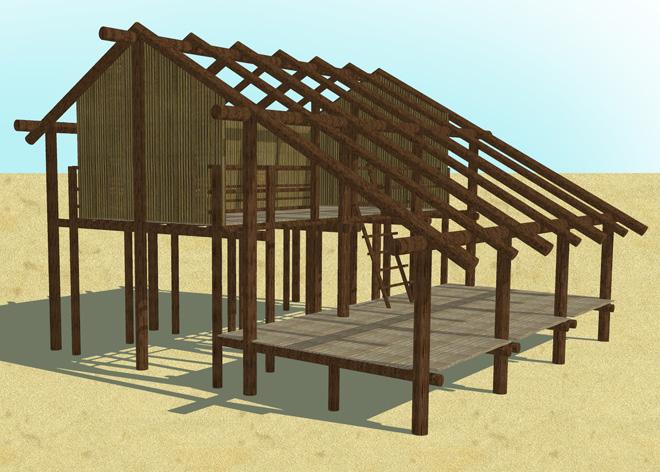

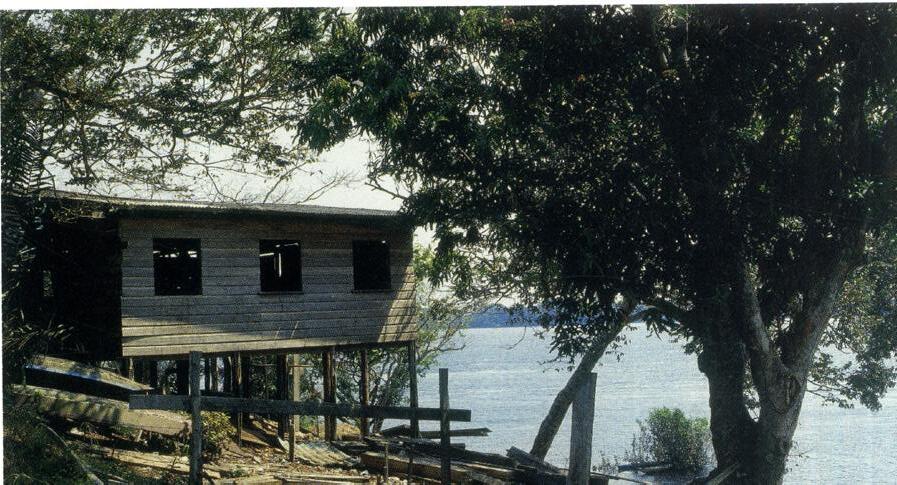
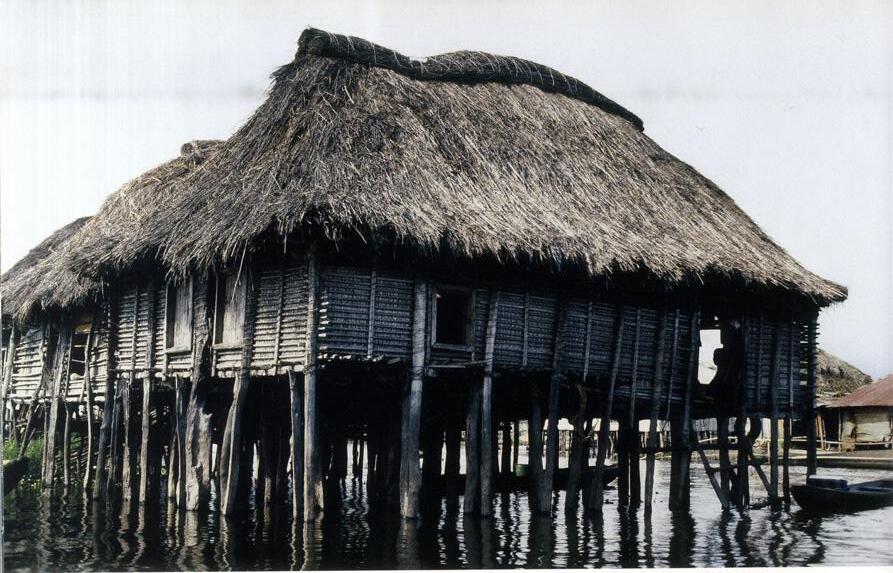

Spatial Organization:
• The ground-floor is used as a place to store wood or for rearing livestock, and so on to suit their lifestyle and also for social interaction.
• The floor above the stilts is an undivided space used for living.[Figure 4.10]
• There is no division of the house into rooms.
• The kitchen is often located behind the living space, on the ground level.
The construction and the material techniques in Andaman and Nicobar Islands are also similar to the techniques [Figure 4.12] adopted in other coastal areas of the same climatic zone for example Brazil, certain parts of Africa and Sumatra. [4.3]
Figure 4.10 Image showing the spatial organization in a typical housing typology of A & N Islands. Note the undivided living space on the top floor.
Figure 4.11 Interior view of a traditional house in the Island.
Figure 4.12 Images showing similar housing typologies existing in regions lying in the same climatic zone as A & N Islands.
4.3 Lauber Wolfgang, ‘Tropical Architecture’, Prestel, Munich, 2005.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 78 Site
Figure 4.10
Undivided living space
Figure 4.11
Figure 4.12
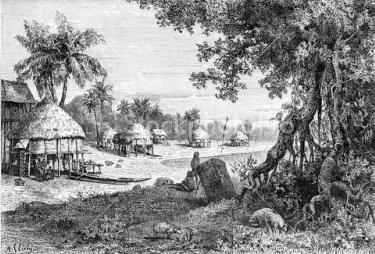
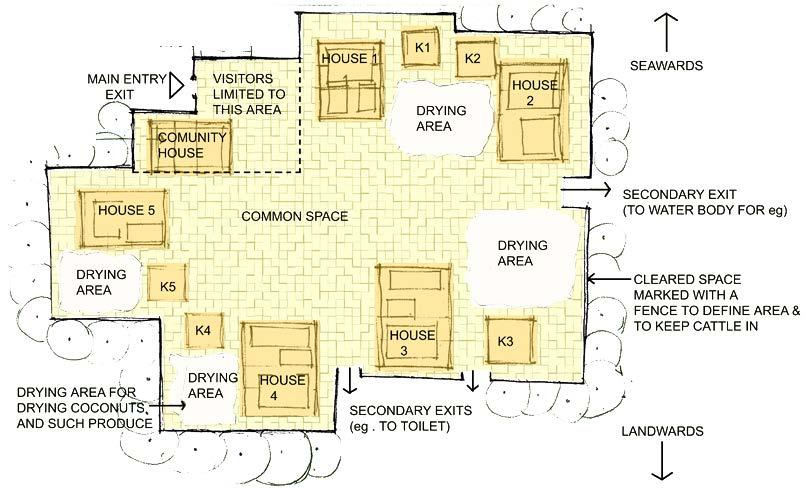
Figure 4.13 Image showing the village organization in the islands of A & Nicobar.
Figure 4.14 Diagram (PLan) explaining the Tuhet community planning which is influenced by the social structure existing in these islands.
Social Organization: Tuhet Planning
4.4 Integrated Design, Evaluation report on housing and reconstruction model in A & N Islands proposed by Town and Country Planning Organization, New Delhi.
It is of utmost importance to understand the social organization as it governs the placement and the spatial organization of houses on site. Their way of living is a major deciding factor for the evolution of the social and village pattern.
The Tuhet is the most important aspect of the social organization of the Nicobari. It denotes the large lineage group residing in their individual houses and huts that are either built adjacent to the primary homestead or in their horticulture gardens and plantation. The significance of Tuhet lies in the socio-economic integrity of its members unlike the nuclear or the joint family system.
The primary unit of the Nicobari social organization is the extended household. This system is based on shared resources and human power where the extended household communally owns all productive as-
sets. Thus this economic and social organization has a material basis. The Nicobari tribes are a gathering society. The centrality of coconuts and coconut plantations makes the Nicobari rather immobile. These plantations are not really plantation in the conventional sense of the word but managed gardens that yield subsistence and different in terms of their non-monoculture status. This form of a material basis makes for a unique extended family. [4.4]
A single Tuhet settlement consists of about 8-10 households with 50-100 members. Apart from the houses in the settlement, each household has a house in the plantations. These plantation houses are linked to each other through footpaths in the forest. Each house, both in the settlement and in the plantations is generally surrounded by a kitchen garden.[Figure 4.14]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 79 Site
Figure 4.13 Figure 4.14

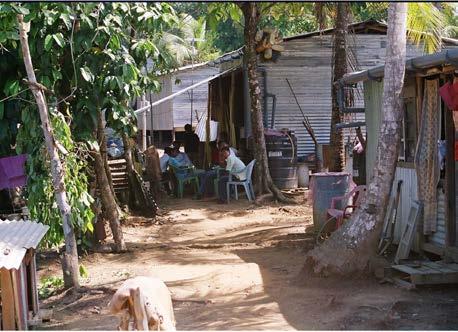
Existing Temporary shelters
Provided Design
The proposed design of the temporary shelter was a single room. Irrespective of the family size, each house had carpet area of about 16 m2. No differentiation of spaces according to the functional requirement was provided. The walls and the roof were primarily made with CGI Sheets.
Impacts of the provided design
• Climatically unsuitable: The tin shacks provided were climatically unsuitable. They would become too hot during summers and leak during winters. [Figure 4.16]
• Transportation: The material used was not available locally and had to be imported from the mainland India along with the manpower. Tsunami had disrupted most of the jetties along the coast and very few transportation routes were available making it extremely difficult to import the materials on time.
• Construction: Complete labour had to be resourced from mainland India because the proposed technology was new to the inhabitants of A & N Islands. This resulted
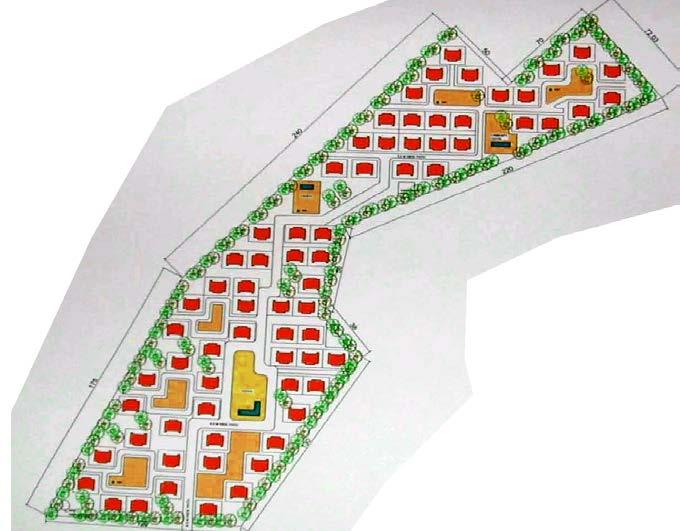
in non-involvement of local people in the construction process even though they are well versed with timber and bamboo construction techniques.
• Cost: Due to the transportation constraints, the cost of per unit escalated by 300 percent which was highly inappropriate for a temporary shelter.
• Placement: These shelters were placed towards the interior of the island away from people’s place of occupation.
• Socio-cultural impact: The Nicobari tribe lives in extended households. By providing tiny, fragmented dwellings and placing them too close to each other, the traditional Tuhet planning is not incorporated thus making the design socially and culturally unsuitable. [Figure 4.17]
The analysis shows the inadequacies of the design to imbibe traditional constructional, material, social and cultural logic in the process so as to put forth an appropriate design tailored to the needs of the people.
Figure 4.15 Image showing the temporary shelter provided for the victims of Tsunami 2004. Note the semi-detached shelters
Figure 4.16 Image showing the temporary shelter provided for the victims of Tsunami 2004. Note the tin shelters provided.
Figure 4.17 Plan showing the placement and the organization of the provided shelters.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 80 Site
Figure 4.15
Figure 4.16
Figure 4.17
Figure 4.18 Diagram stating various input factors for formulation of the design strategy.
Site constraints and context
Transportation
Cost of construction
Material availability
Design aspects
Material and construction logic
Spatial logic
Conclusion
The analysis carried out proves that there cannot be a generic solution for the design of a temporary shelter in terms of the material logic and spatial organization. Each design has to be modified and modulated as per the constraints and the requirement of the site.
As seen in this chapter, Andaman and Nicobar islands have certain unique site constraints mainly in terms of the site location, material availability, social and cultural aspects. These issues make the present day modular temporary shelters even more unacceptable in this area and pose immense challenge to design a site specific temporary shelter.
The design aims firstly, at designing housing units taking into considerations the social and cultural housing cluster patterns existing in this region. Secondly, it is to propose a fabrication and material logic based on the site conditions and vernacular construction technique.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 81
Site
Vernacular housing pattern
Figure 4.18
Chapter 05 : Design Development
01) DESIGN STRATEGY
02) MODULAR HIERARCHY
03) UNITS: MULTI-MODULAR ORGANIZATION
04) BLOCK ORGANIZATION
05) COMMUNITY ORGANIZATION
This chapter describes the preliminary design strategy and design development experiments conducted as per on the site requirements of Andaman and Nicobar Islands.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 83
Design development
Design development
Design program
Community Housing unit
Housing units
Community spaces
Living space Kitchen
Shared drying area
Enclosed space
Semi-open space
Enclosed space
Semi-open space
Open space
Design strategy
Module hierarchy (Based on the area requirement)
Units : Modular organization
Blocks : Unit organization
Community : Block organization
Design Strategy
Since the purpose of the design is to provide temporary shelters that can assist to resume normal lifestyle of the people affected by the disaster, the design program and strategy adopted reflects the existing social and cultural pattern in Andaman and Nicobar islands.
The program elements are categorized as enclosed spaces for private use, semi-open spaces for private and public use, and open spaces for shared resources. [Figure 5.1]
The community is designed for 15-18 dwelling units housing 150-200 people. Each housing units consists of an enclosed space as the living unit on stilts and a semi-
open kitchen area on the ground floor.
The design strategy involves obtaining spatial variation by generating hierarchical and multi-modular irregular tensegrity units. This is carried out in four stages that involves firstly analyzing the modules as per the design requirement and forming multi modular units from the selected modules. These multi modular units are then organized to obtain the desired spatial variation and order. [Figure 5.2]
5.1 Diagram listing the functional and spatial requirement of the design.
5.2 Diagram showing the stages of preliminary design experiment
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 84
Figure
Figure
Figure 5.1
Figure 5.2
Design development
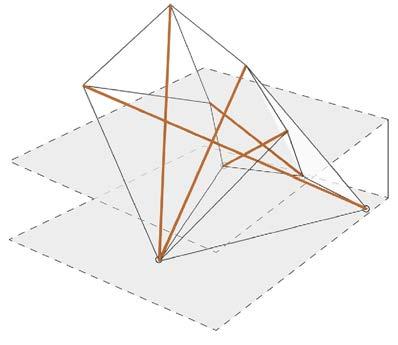

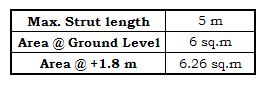
Maximum strut length
Usable area at 1.8 m height
1.8 m
Usable area at ground level
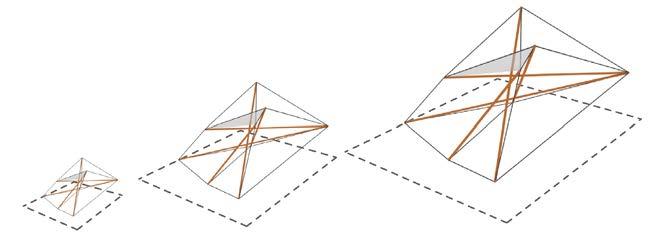
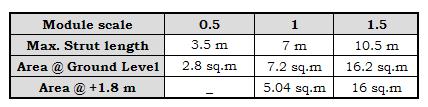
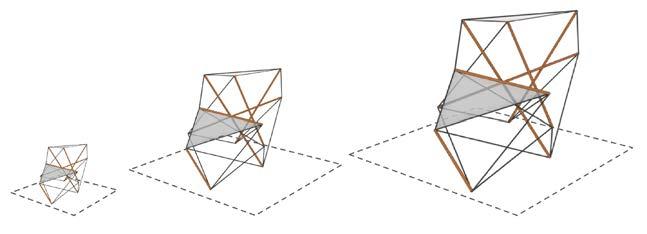
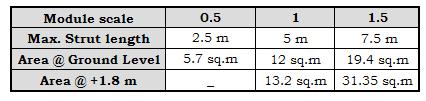
Modular Hierarchy
5.3 Diagram showing the parameters for evaluating each module.
Figure 5.4 Diagram showing an example of a module evaluated on the set parameters.
Figure 5.5 Diagram showing two examples that are evaluated at various scales and the selected scale suitable as per the design requirement.
To select the modules fulfilling the design requirements it is critical to thoroughly analyze each module for their usable area and fabrication ease. Therefore the optimized and adapted geometries generated from the digital process are evaluated on three parameters viz. a) usable area available on ground floor, b) usable area at +1.8 m from the ground floor (since some spaces are on stilts) and c) longest strut length. [Figure 5.4]
As stated in the design program, there is spatial differentiation and different area requirements for each function. As an example, for a living unit, the area of the module at 1.8 m is important whereas for the kitchen unit, usable ground area is the
deciding factor. Thus to get to the desired variation, each module is analyzed for three different scales of 0.5, 1 and 1.5. These modules are then evaluated based on the set parameters. The minimum requirement for usable area on ground floor and at 1.8 m height is 6 sq m and 30 sq m respectively. For fabrication ease the maximum desirable strut length is constrained to 15 m. [Figure 5.5]
This process eliminates the hierarchies of the modules that are either having minimal usable area or have strut lengths that are difficult to fabricate. The selected scales of the modules are then used for further design development.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 85
Figure
A (A) (B) (C) B C A (A) (B) (C) B C
Figure 5.4
Figure 5.5
Design development
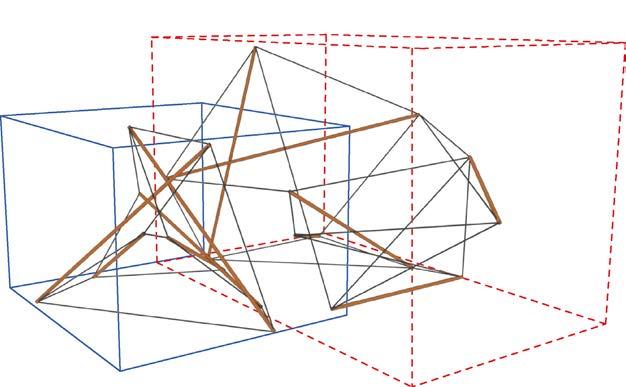
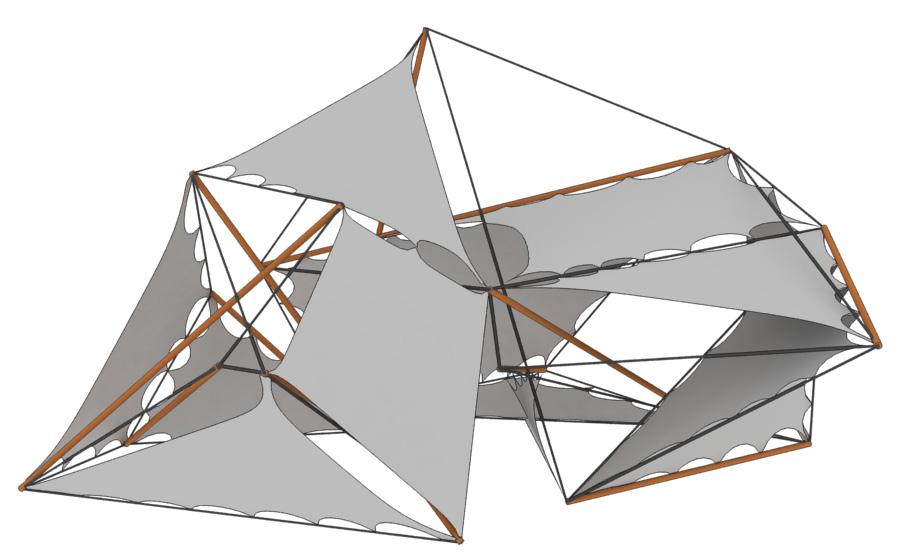
Units : Multi-modular organization
After selecting the modules with structural differentiation, the next step is to enhance the spatial variation by having hierarchical organization and connection logic.
Multiple modules of varied scales are organized to generate multi-modular units with diverse spatial quality. The organization logic is to create inter-modular usable spaces to obtain spatial multiplicity. There exists both differentiation and continuity of spaces within the organized modules.
In the following example, six units with varied proportions of enclosed and semi-open areas are obtained by organizing different scales and orientations of just two tensegrity modules. [Figure 5.7]
Figure 5.6 Diagram showing arrangement of multiple modules of different hierarchies and the spatial quality of the unit.
Figure 5.7 Diagram showing examples having varied spatial qualities achieved by varying the scale of modules and their various combinations. Note: there is variation in the proportion of enclosed and semi-open space.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 86
Figure 5.6
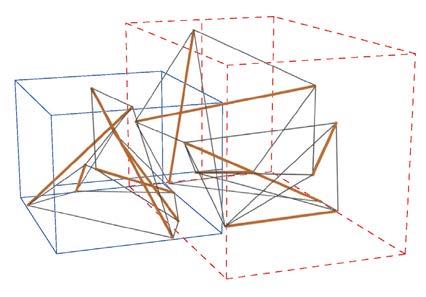
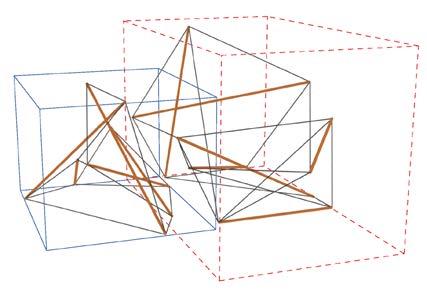
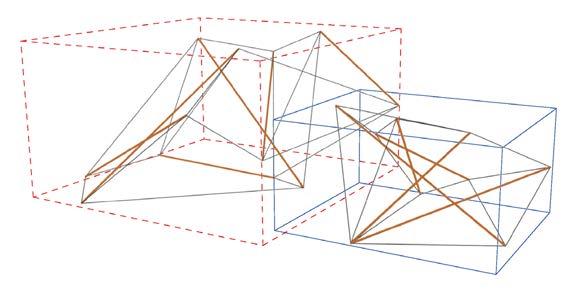
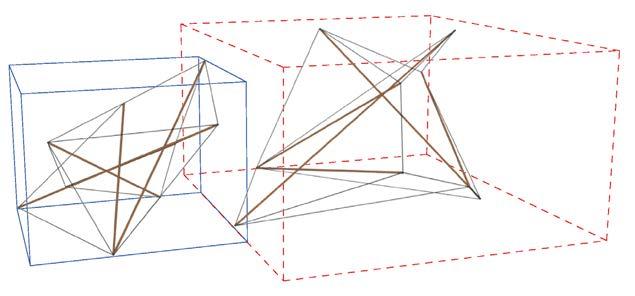
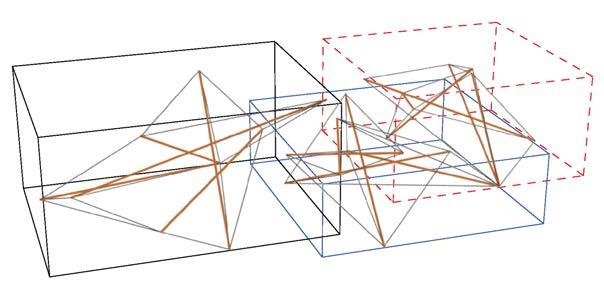
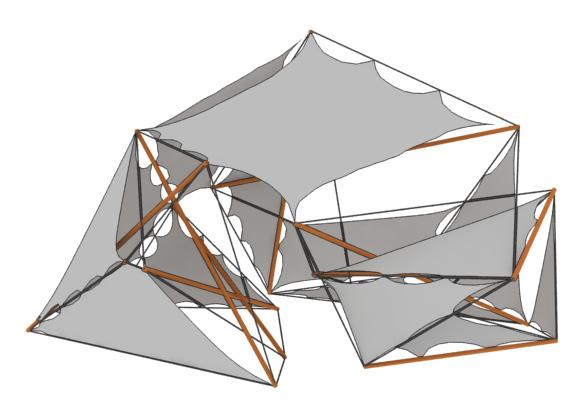
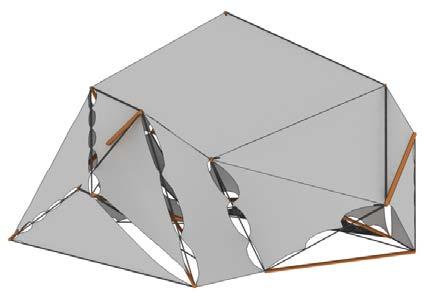
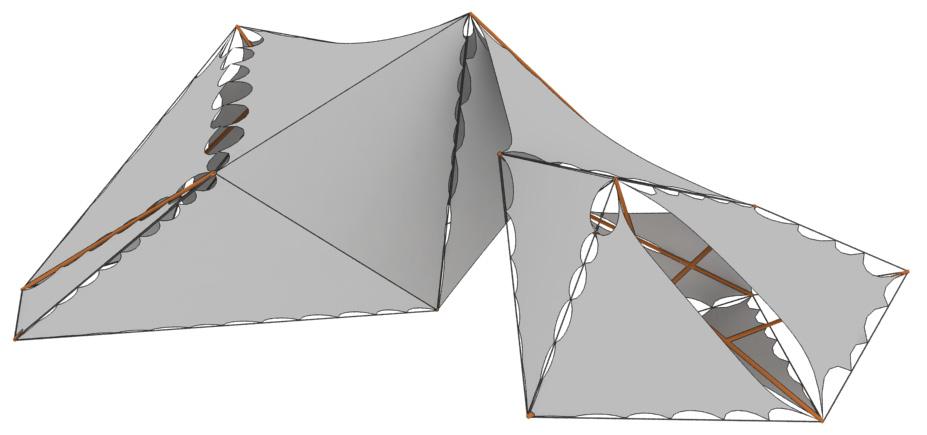
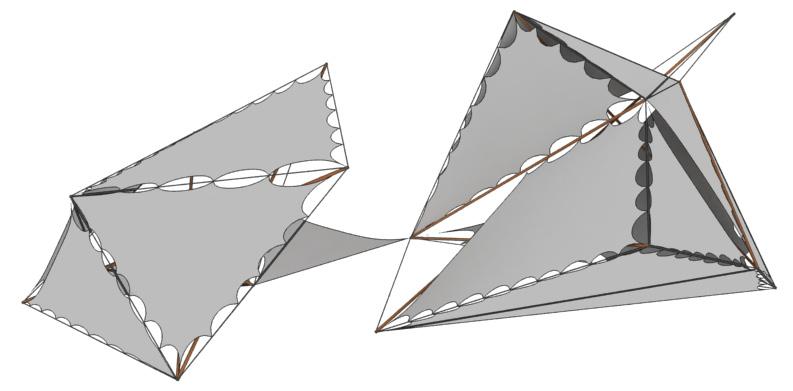
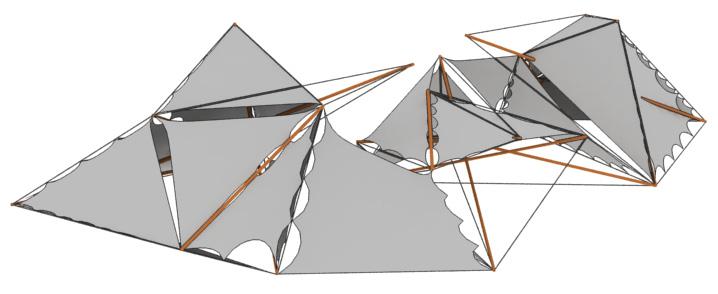
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 87
semi open enclosed enclosed enclosed enclosed semi open semiopen semiopen
development
Figure 5.7
Design
Design development
Primary connection
Secondary connection
Tertiary connection
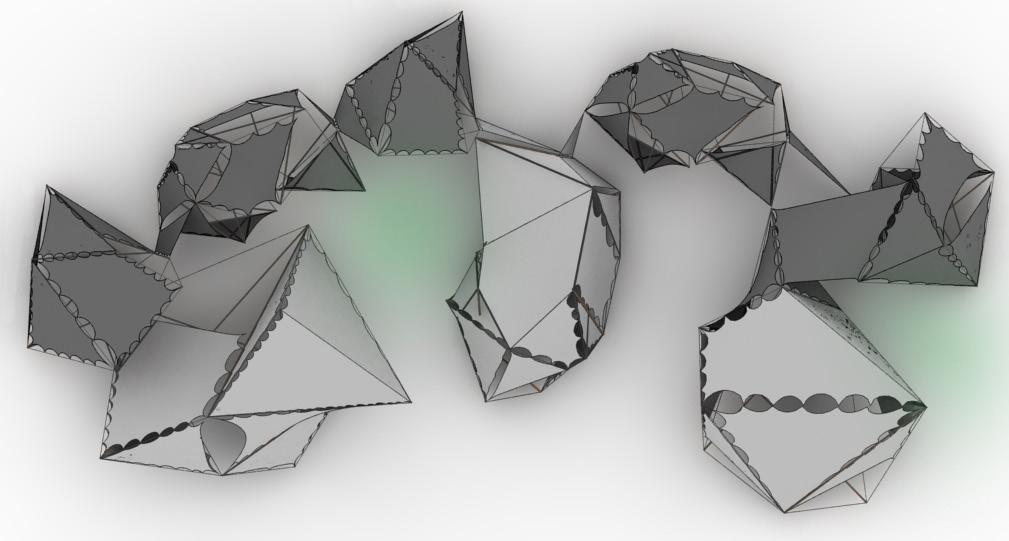
Block organization
After generating units with varying spatial qualities, the next stage is to organize these units to generate spaces and activities reflecting the existing social and cultural pattern of the site.
A topological diagram is set as a base for organizing the units on site. The topological diagram reflects the connection pattern between each unit. The primary connections are the ones connecting the public space i.e. the community area and private space i.e. the living unit of each dwelling. The secondary connections are for private use, connecting the living area and the kitchen area of each dwelling. The tertiary connection is visually connecting the kitchen area and the shared drying area.
To begin with, each unit is assigned a
function based on its available usable area and spatial quality. These units are then organized with reference to the topological diagram to generate blocks of three dwelling units. It is observed that interaction of these units with each other create interesting pattern of inward looking and outward looking spaces. This generates varying order and hierarchy in the space created around the units. There are three patterns of blocks obtained by organizing these units based on the topological diagram.
Since the climate of the region is hot and humid, analysis of the shadow pattern of the block is carried out to inform the placement of units to obtain more shaded open areas. This helps in orienting the block on site for a better climatic response.
Figure 5.8 Topological diagram as a basis for block organization.
Figure 5.9 Plan of Block A showing assigned function of each unit and formation of inward and outward looking spaces due to interaction of these units.
Figure 5.10 View A
Figure 5.11 View B
Figure 5.12 View C
Figure 5.13 Shadow analysis of block A for the month of may.
Figure 5.14 Plan of Block B
Figure 5.15 Plan of Block C
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 88
Community spaCe Housing unit living area Housing unit living area sHared drying area Housing unit kitCHen Housing unit kitCHen
Figure 5.8
Figure 5.9
living unit
sHared drying area
entranCe
entranCe
view a view B
view C
entranCe
entranCe
sHared drying area living unit living unit
kitCHen inward looking spaCe outward looking spaCe puBliC spaCe puBliC spaCe
kitCHen kitCHen
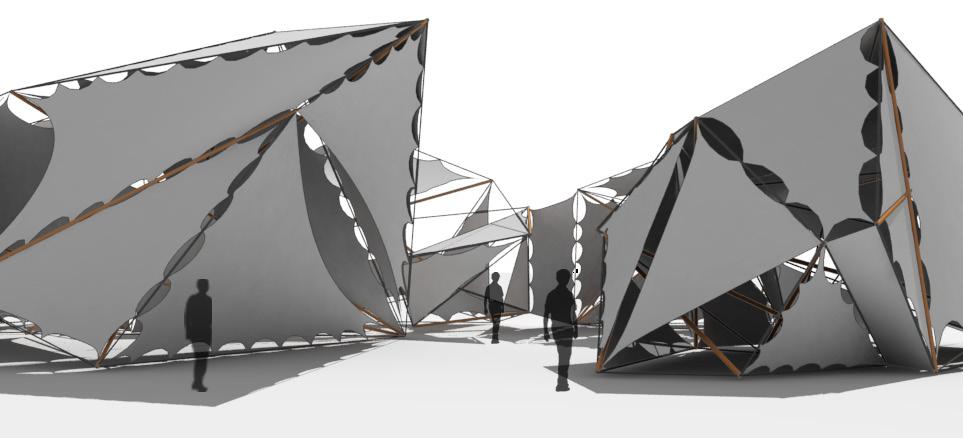
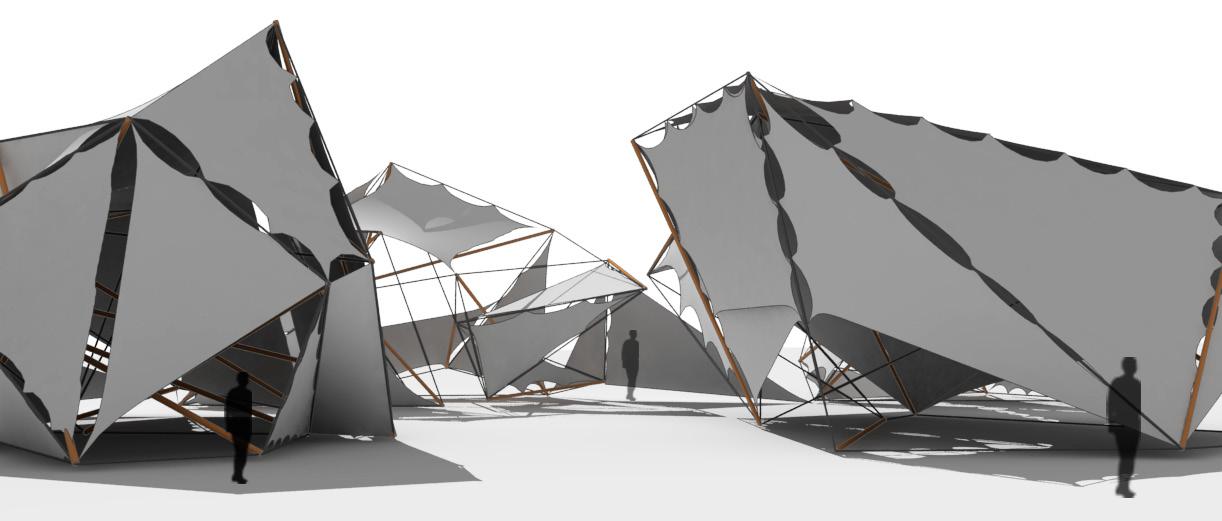
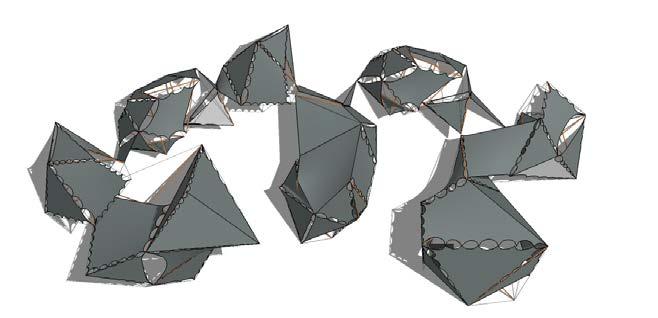
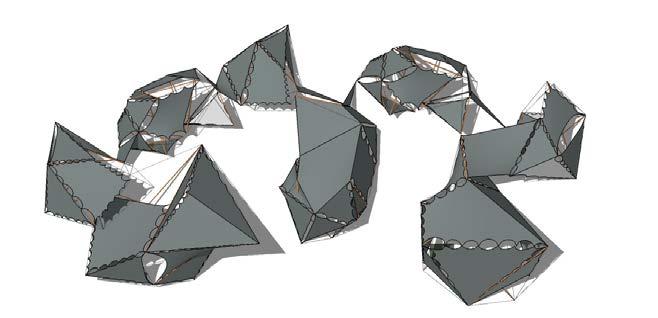
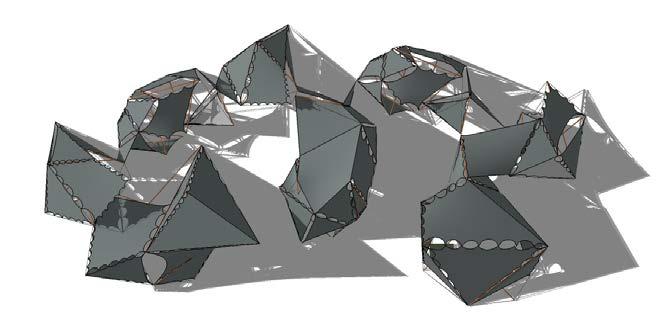
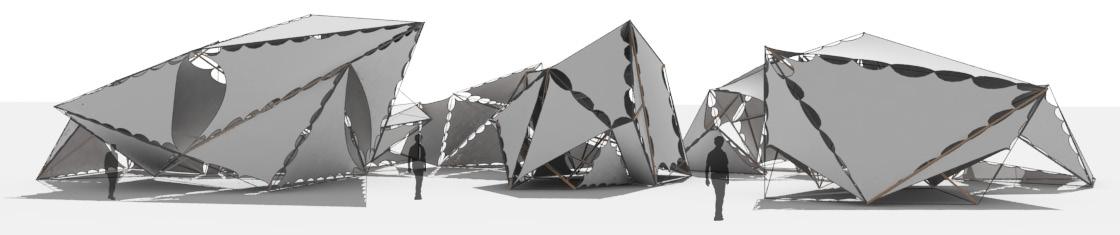
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 89 Design development
Figure 5.10
Figure 5.11
Figure 5.13
10.00 am N N N 01.00 pm 04.00 pm
Figure 5.12
Design development
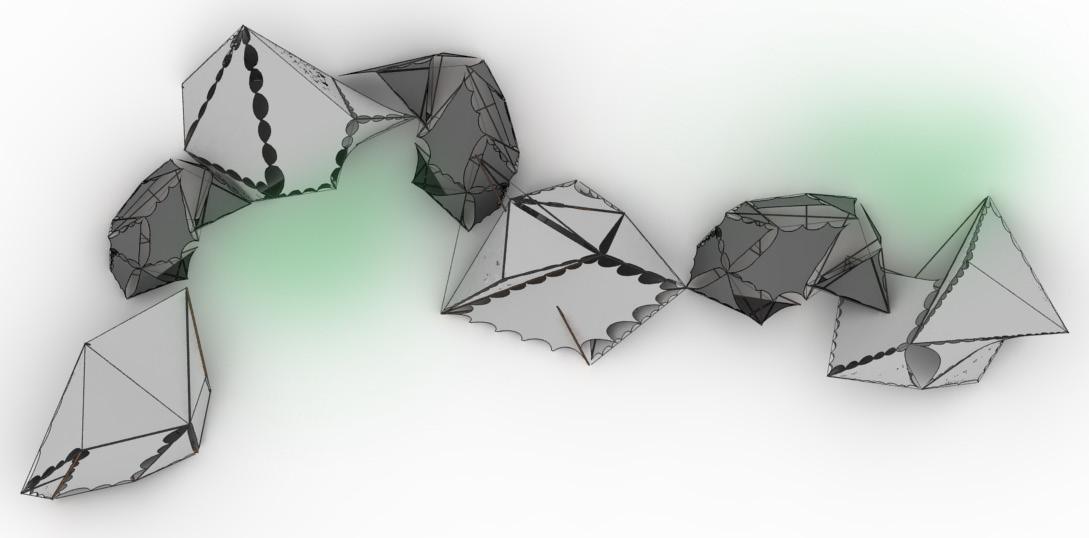
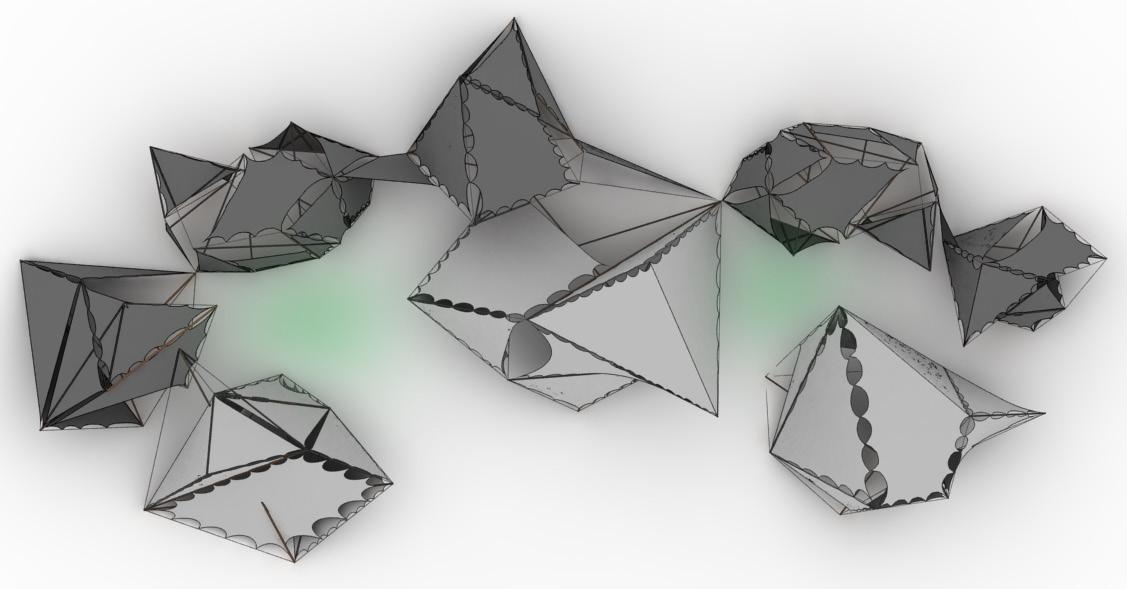
5.16 - Figure 5.20 Plans showing various of community organization.
Figure 5.21 View of community organization.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 90
Figure 5.14
Figure 5.15
Figure
living unit living unit living unit living unit sHared drying area sHared drying area
drying area
drying area
sHared
sHared
entranCe
entranCe
entranCe
entranCe
entranCe
entranCe
kitCHen inward looking spaCe inward looking spaCe inward looking spaCe outward looking spaCe living unit living unit living unit
kitCHen kitCHen
kitCHen
kitCHen
spaCe
kitCHen
puBliC
spaCe
puBliC
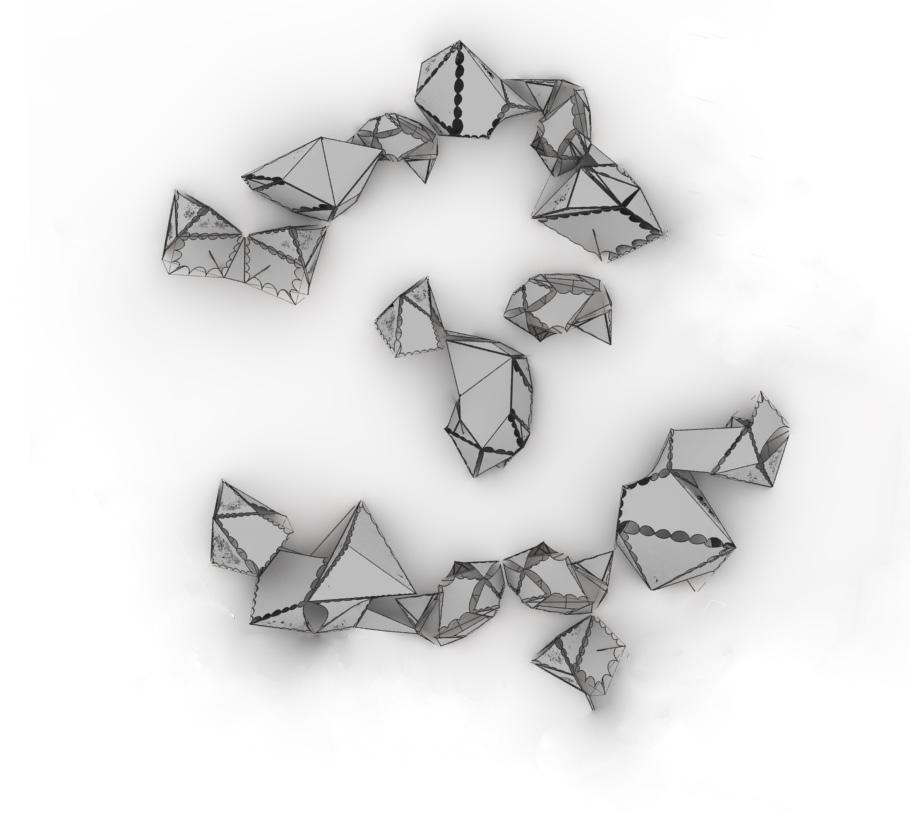

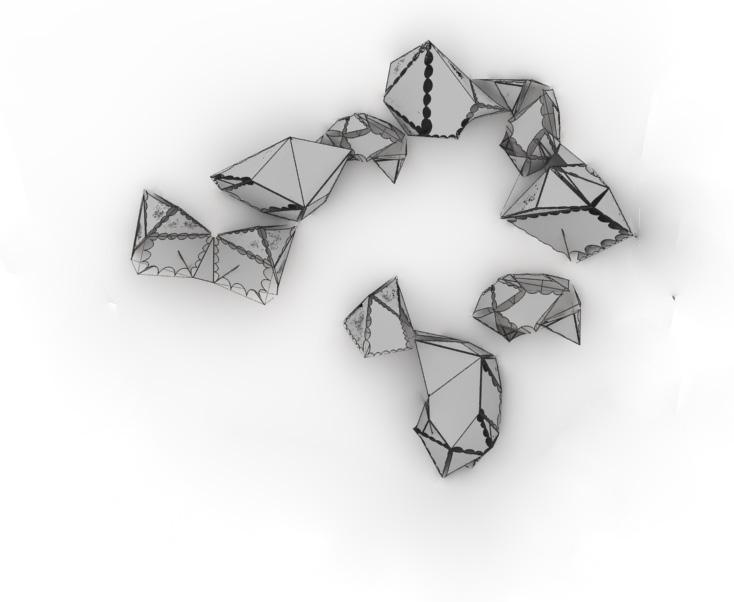
Community organization
The blocks are arranged to form a community of 15 dwelling units. Interaction of one block with another as well as of individual units with each other informed the process of community organization at each stage. The community has one main entrance and three secondary exits.
The community organization is an attempt to reflect the traditional pattern existing in Andaman and Nicobar Islands.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 91
Design development
Figure 5.17
Figure 5.18
Figure 5.16
entranCe to dwelling unit
Design development
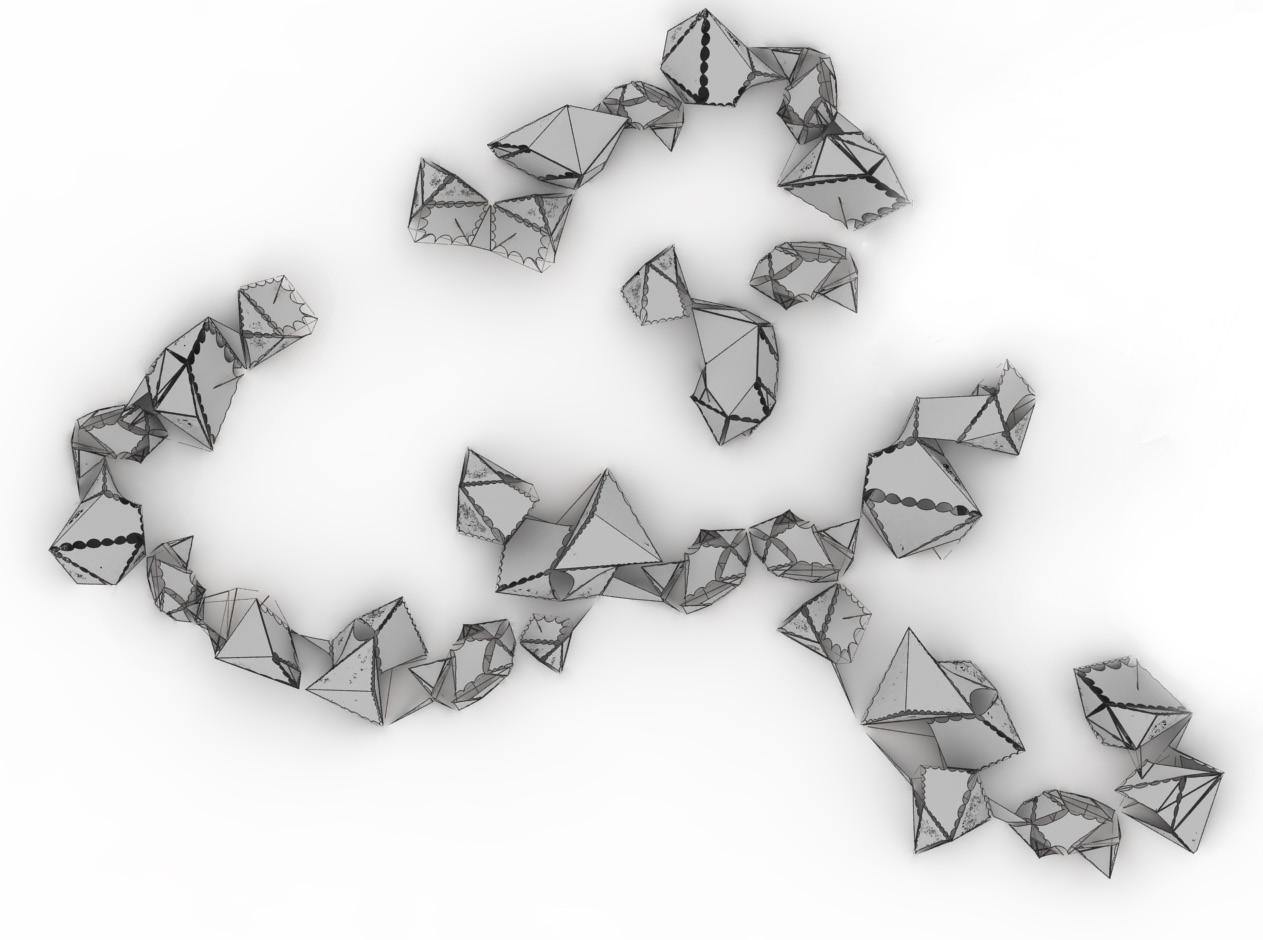
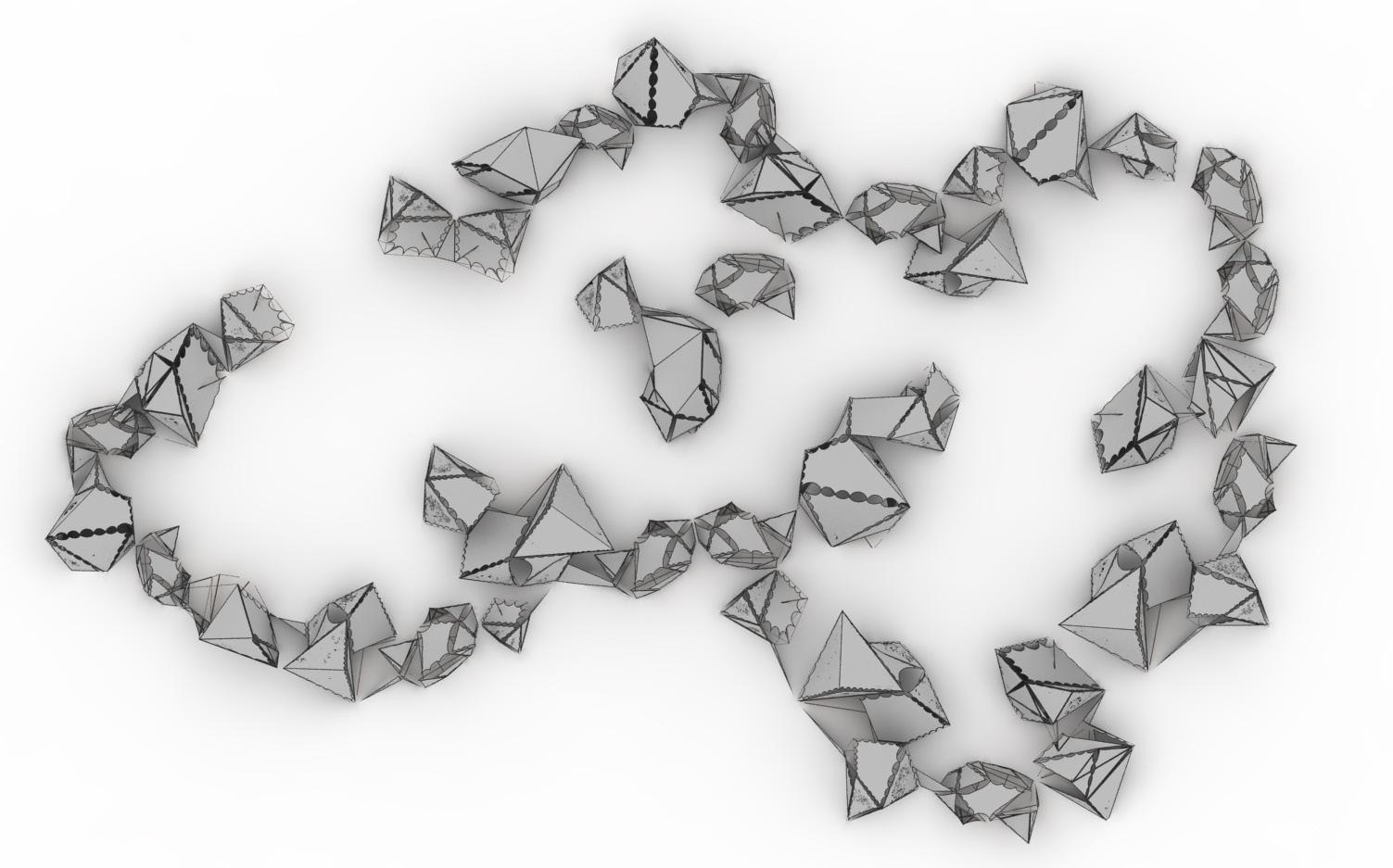
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 92
Figure 5.19
Figure 5.20
main entranCe
seCondary exit
seCondary exit
seCondary exit
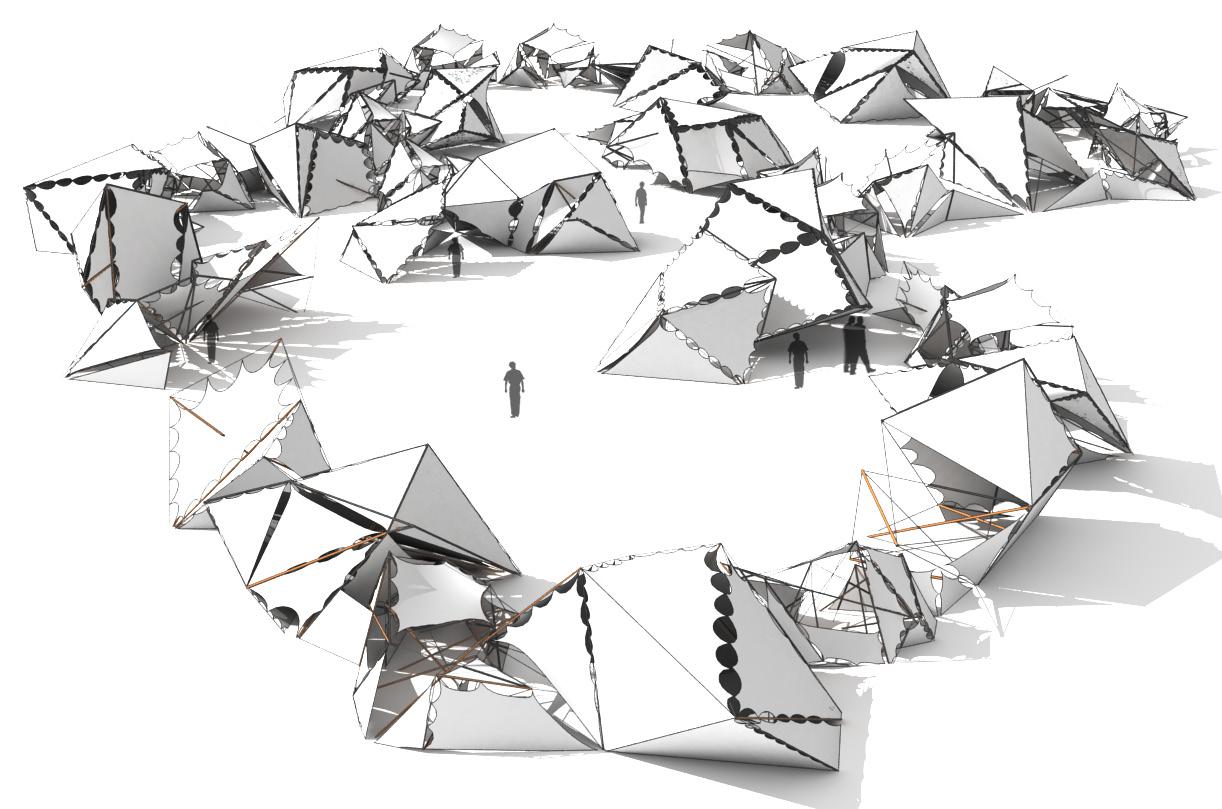
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 93 Design development
Figure 5.21
Chapter 06 : Design
01) REVISED DESIGN STRATEGY
02) COMMUNITY ORGANIZATION
03) VILLAGE ORGANIZATION
04) FABRICATION
Material selection
Construction logic
Joint details
This chapter describes the final design and fabrication logic after critically evaluating the preliminary design experiments.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 95
Design
Revised
design strategy
Hierarchy and variation
Social Spatial
Community size (No. of dwelling units in a community)
Family size (No. of members in a family unit)
oCCupation
topologiCal variation
Design program
Design Strategy
After critically analysing the design strategy adopted in the design development and revised design strategy was adopted. In the preliminary development, spatial differentiation was generated using different scales of the modules. In the revised strategy, hierarchy and variation in obtained at two levels viz. Social and spatial. The social hierarchy informs the spatial variation.
In the final design, there are six communities each with varying user group with respect to their occupation, number of members in the family and number of family units in the community. This informs the area requirement, spatial and topological variation of each community.
6.1 Diagram listing the parameters for obtaining hierarchy and variation in the design.
6.2 Diagram stating the design program of each community.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 96
Design
Figure
Figure
Figure 6.1
Community size (no oF dwelling units) Family size (no oF memBers) oCCupation required living area ( sq m) required kitCHen area (sq m) a r CH ite C tural CHaraCter Community a Community B Community C Community d Community e Community F 10 8 6 10 8 6 6-7 4-5 4-5 3-4 4-5 6-7 FisHermen •Shared drying area •Living unit on StiLtS •Kitchen aS a seperate unit on ground Floor •Shared drying area •Living unit on ground Floor •Kitchen aS a separate unit on ground Floor •no Shared drying area •Living unit on StiLtS •Kitchen on ground Floor Farmer non triBal FisHermen Farmer non triBal 10 10 9 9 10 14 32 25 25 16 27 32
Figure 6.2
Primary connection
Secondary connection
Tertiary connection
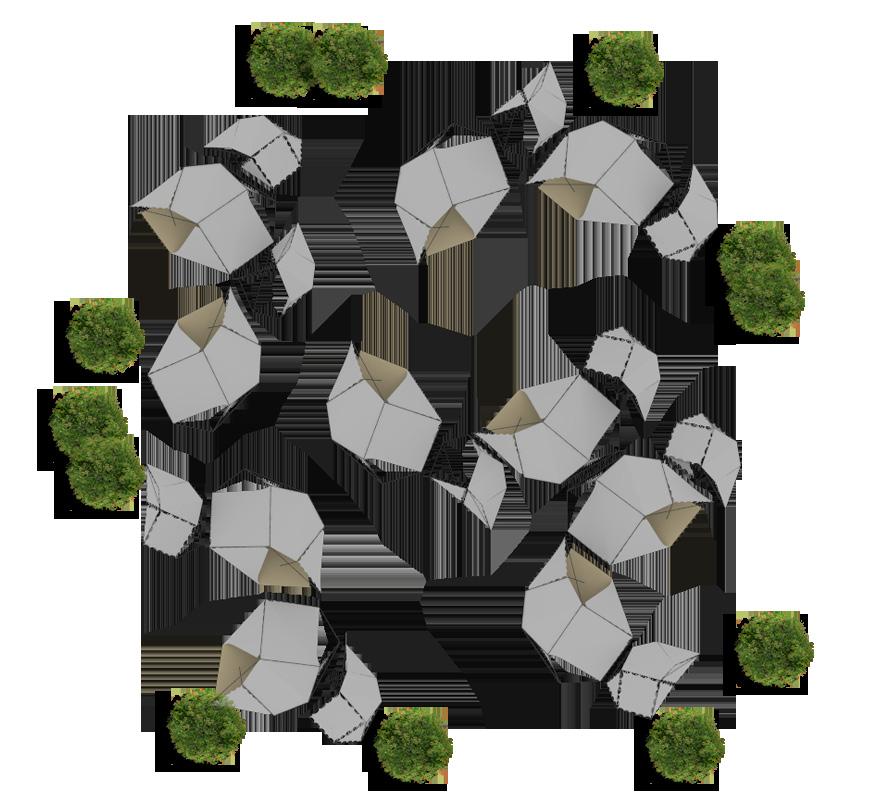
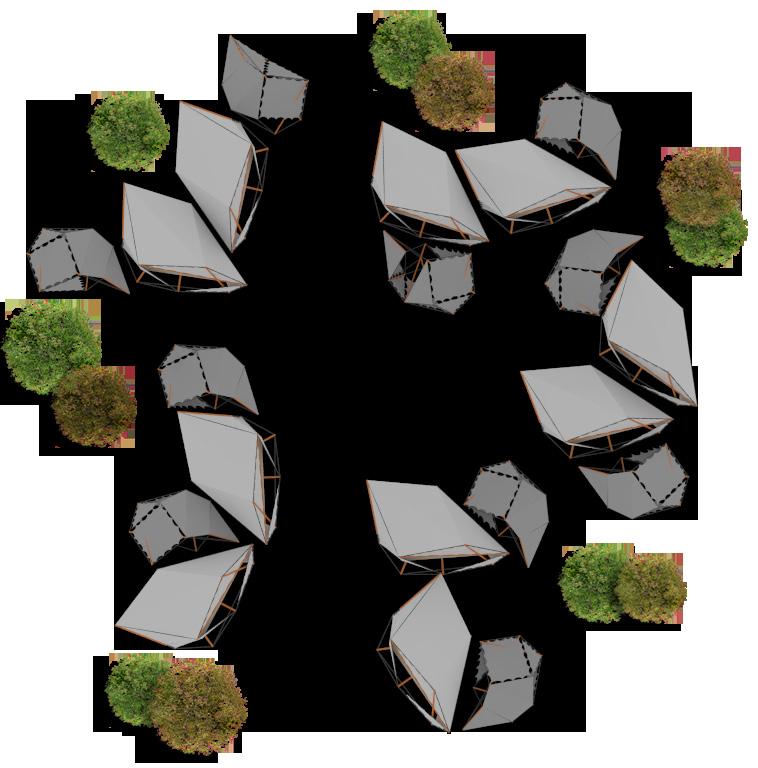
Community organization
Based on the revised design program, six communities with different topological connections and different spatial requirements are designed.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 97 Design
Figure 6.4
Community spaCe Housing unit living area Housing unit living area living area sHared drying area Housing unit kitCHen Housing unit kitCHen
Figure 6.5
Figure 6.3
kitCHen
living area kitCHen
Design
Primary connection
Secondary connection Tertiary connection
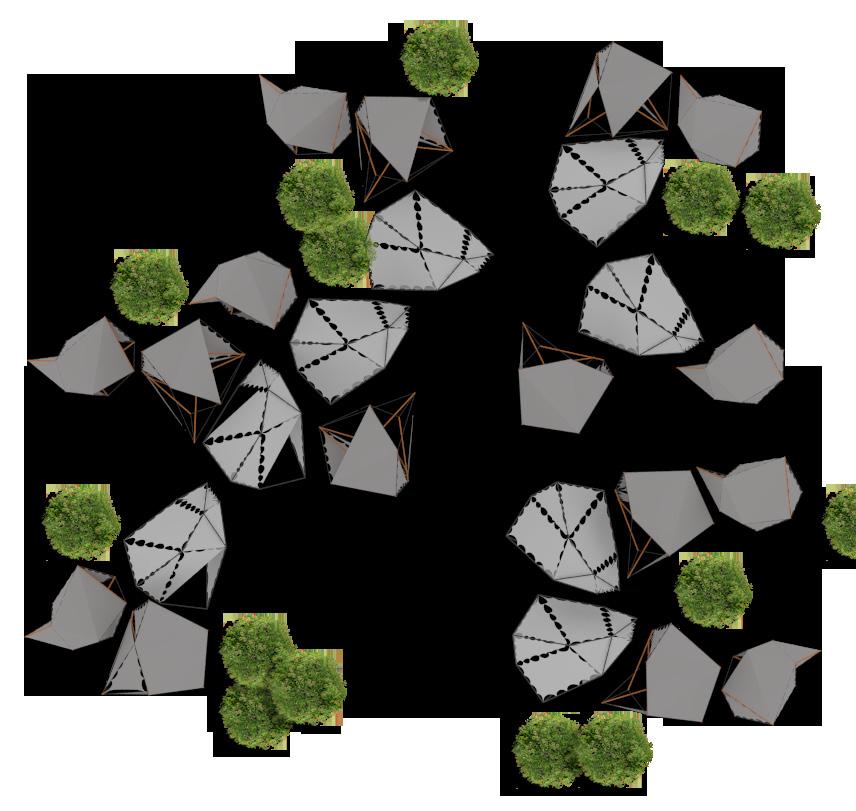
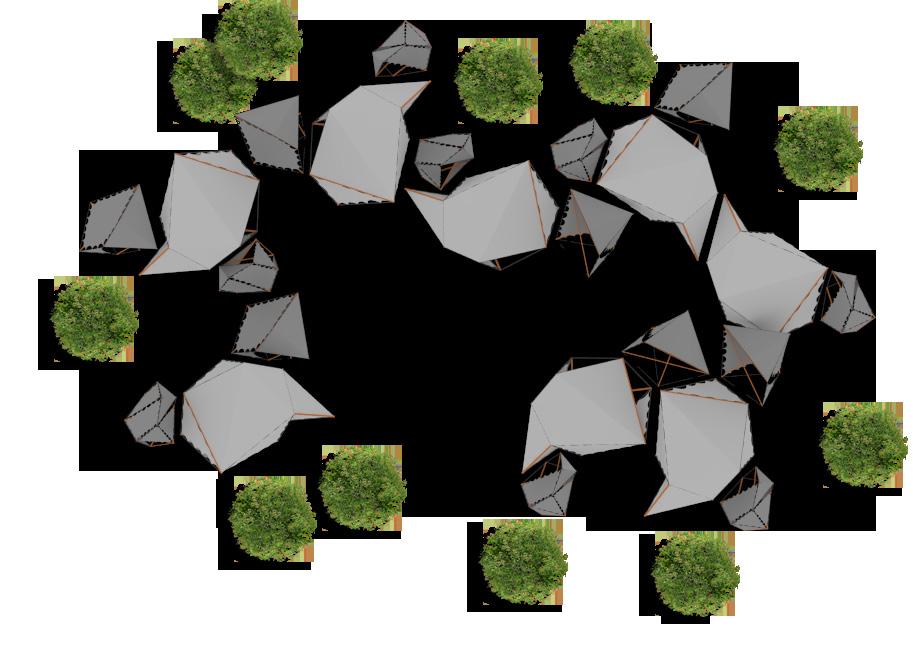
Figure 6.3 Topological diagram of community A and B
Figure 6.4 Plan of community A
Figure 6.5 Plan of community B
Figure 6.6 Topological diagram of community C and D
Figure 6.7 Plan of community C
Figure 6.8 Plan of community D
Figure 6.9 Topological diagram of community E and F
Figure 6.10 Plan of community E
Figure 6.11 Section through community E
Figure 6.12 Section through community D
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 98 Community spaCe Housing unit living area Housing unit granary Housing unit granary Housing unit living area sHared drying area Housing unit kitCHen
Housing unit kitCHen
Figure 6.6
Figure 6.7
Figure 6.8
connection
Secondary connection
Tertiary connection
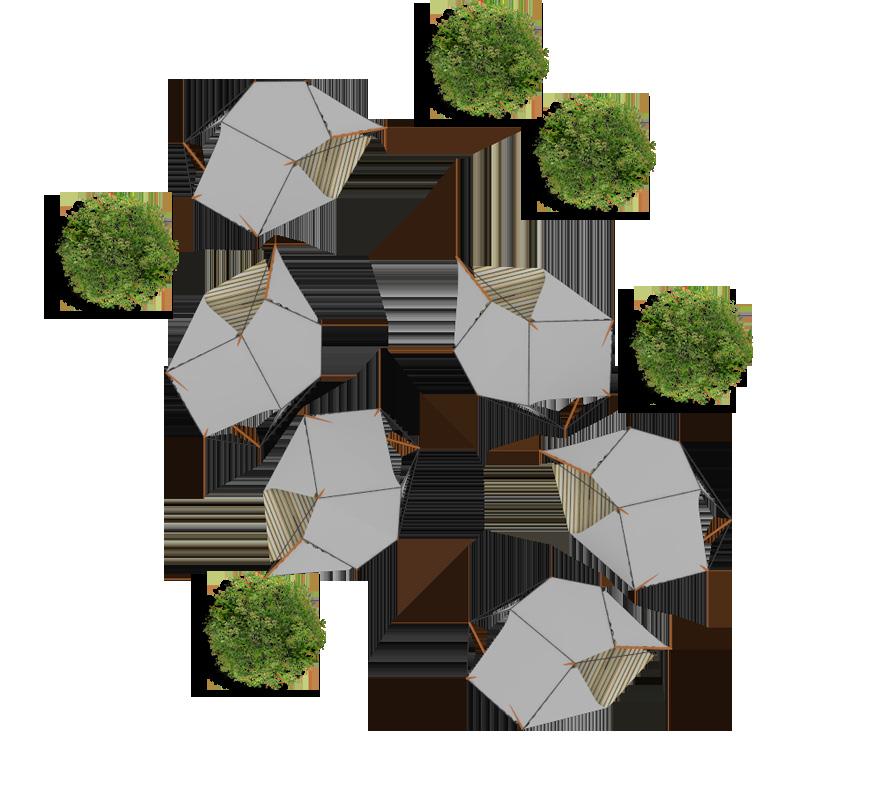
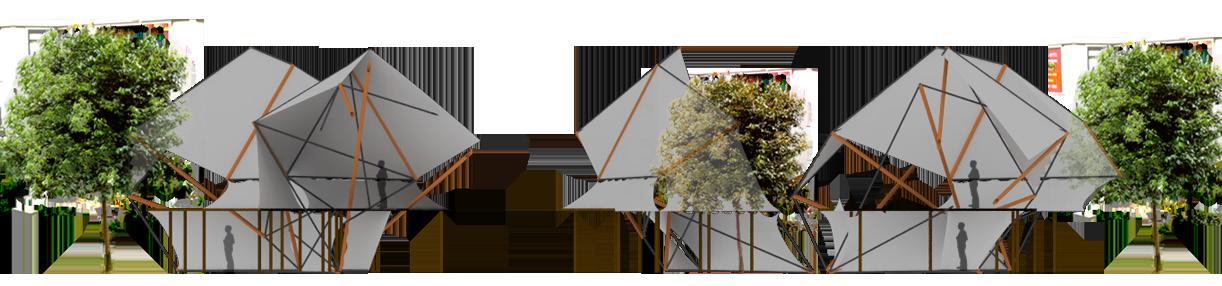
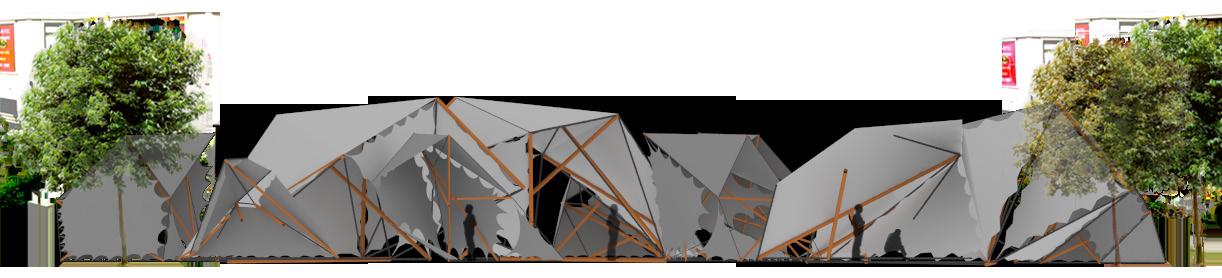
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 99 Community spaCe Housing unit living area Housing unit living area sHared drying area Housing unit kitCHen
Primary
Housing unit kitCHen Design
Figure 6.9
Figure 6.10
Figure 6.11
Figure 6.12
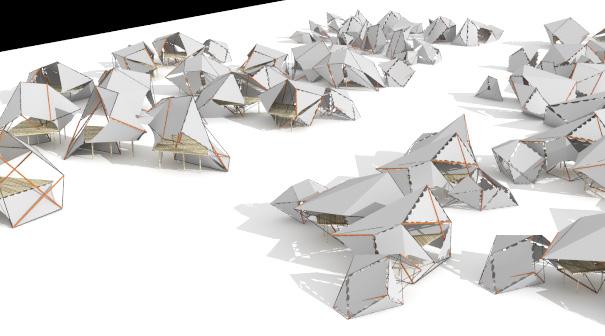
Village organization
These six communities are placed along one main axis road to form a village pattern.

RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 100
Design
Figure 6.13
Figure 6.14
Parameters for selecting material
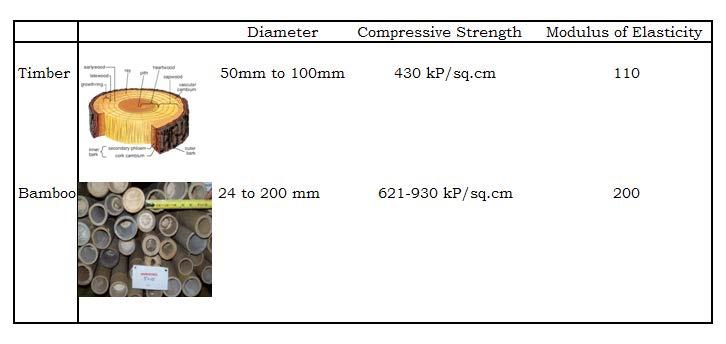
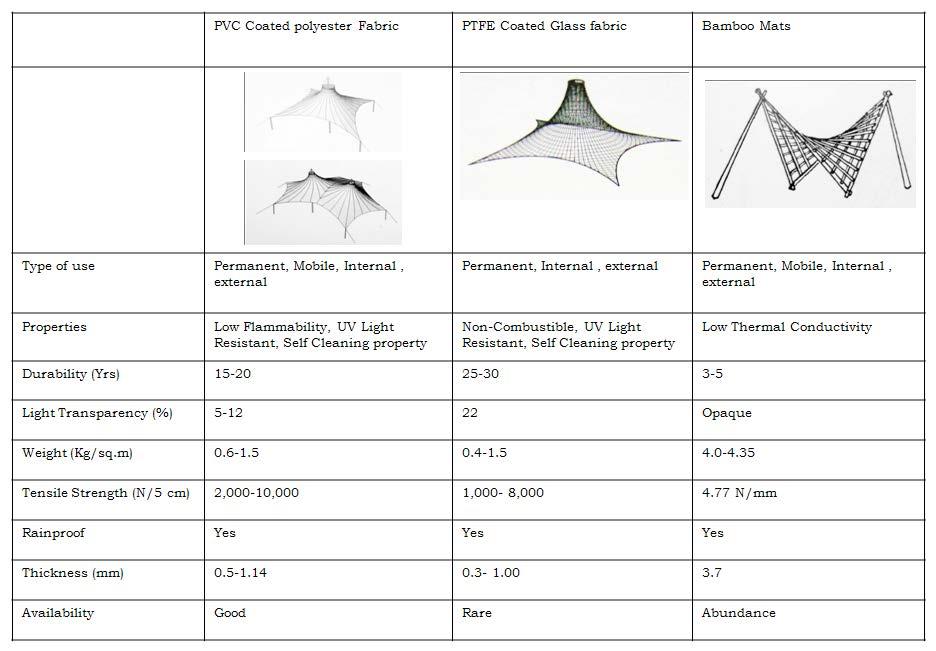
Fabrication
For a temporary shelter, fabrication cost, duration required for its deployment and availability of material on site are crucial factors in deciding the material and construction logic. Since these shelters are occupied until the completion of the permanent houses, to achieve right balance between the material durability and its cost is important.
To propose fabrication logic suitable to the site, it is important to understand the site constraints. Site of Andaman and Nicobar islands has got unique advantages and disadvantages. Located 1000 km away from the mainland India, access to the site and transportation after the disaster is restricted. Hence, availability of proposed material on site is of utmost importance. Bamboo and timber are both available in plenty on these islands. Based on the above set parameters and site constraints, the material selected for struts is bamboo since its cheaper and readily available than timber and for membranes are PVC coated polyester and bamboo mats.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 101 Design
cost
of material on site
Availability
selection
Material properties Material
Figure 6.15
Figure 6.16
Figure 6.15 Diagram stating the parameters for selecting the material.
Figure 6.16 Table comparing properties of various available material for struts and membranes
Design


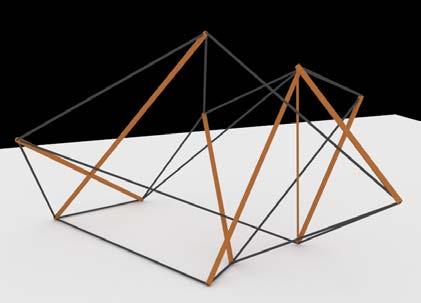
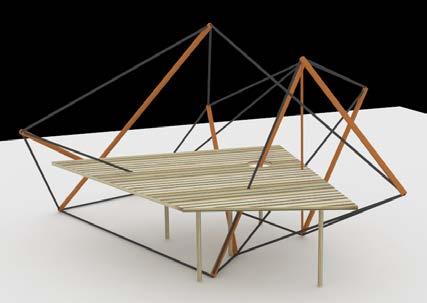
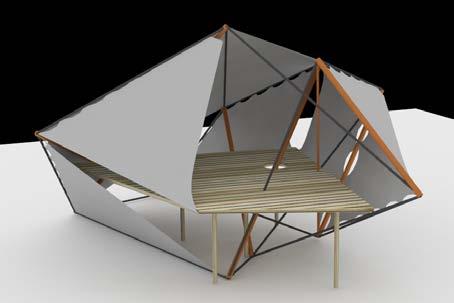
Construction logic
Tensegrity systems are stable only when there is sufficient pre-tensioning in the cables. The construction logic of the design modules is based on this unique structural quality of the system.
The struts and the cables are connected as per the module before being transported to the site. The cables are not pre- tensioned at this stage and hence the module is flat with connection logic in place. Each cable in the module is attached with a ‘cable-tensioner’.
[figure 6.17] Since the design pretension in the cables is 0.1, the cables attached are 0.2 % more in length than their designed length for enabling further tensioning.
Once transported to the site, the tensegrity module is erected by tensioning the cables in sequence using the cable tensioner. The tensegrity module is finally erected when the last cable is tensioned up to the desired limit. The estimated time required to erect these modules is 24 hrs. [figure 6.18]
After the tensegrity module is deployed, the floor is erected on stilts as per the requirement. The floor on the stilts and the tensegrity module are structurally independent, so as to enable the tensegrity module to absorb external disturbances without the floor causing any hindrance.
[figure 6.19]
6.17 Images explaining the deployment of
Figure 6.18 Image of a cable tensioner.
Figure 6.19 Images showing the process of erecting stilts and attaching membranes after the deployment of the tensegrity module. Note: The stilts are structurally independent of the tensegrity module.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 102
Figure 6.17
Figure 6.18
Figure 6.19
Figure
tensegrity structure on site.


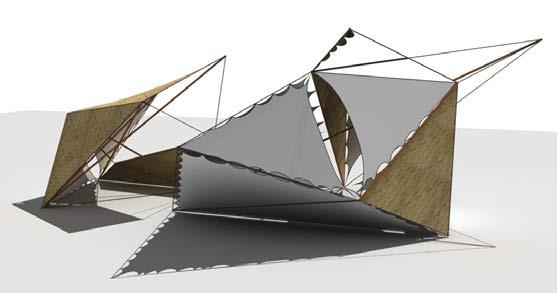
Bamboo because it is hollow and has nodes resists only a little shear stress and can slice easily when the forces are perpendicular to the fibres. Hence design and detailing of bamboo joints is very crucial. The traditional way to connect bamboo is based on handmade techniques which use cables or wood sticks. Another most common joint is to fill the culms close to the joint with mortar and to put a vertical or parallel bolt to connect with the next bamboo Culm. These joints are relatively heavy and complicated because of the use of mortar or do not resist high forces. The joint should be light, strong and appropriate for temporary constructions, which have to be easy to assemble and disassemble. The proposed joint is made of two elements. Firstly, there is a thin steel tube with a diameter of 9 cm and a length of 30 cm. After
perforating the inner fibres of the bamboo to make sure that the tube fits, the tube is inserted 20 cm into the bamboo Culm where it receives 12 vertical bolts to transmit the forces to the bamboo fibres. One end of the tube is reduced to a conical form and offers two elliptical openings, which allow attaching from inside another larger bolt to the conical tip. The second element is a three-dimensional sphere such as used in steel constructions which receives this bolt.
[figure 6.21]
Membranes as a roof enclosures are continuously connected whereas membranes used for semi-open enclosures are attached at regular intervals. Since bamboo mat is climatically more suitable but heavy, it is used for surfaces on the ground floor that are subjected to high sun exposure. [figure 6.22]
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 103 Design
Joint detail
Figure 6.20
Figure 6.21
Figure 6.22
Figure 6.20 Traditional bamboo detail
Figure 6.21 Proposed bamboo detail.
Figure 6.22 Image showing placement of bamboo mats in the module.
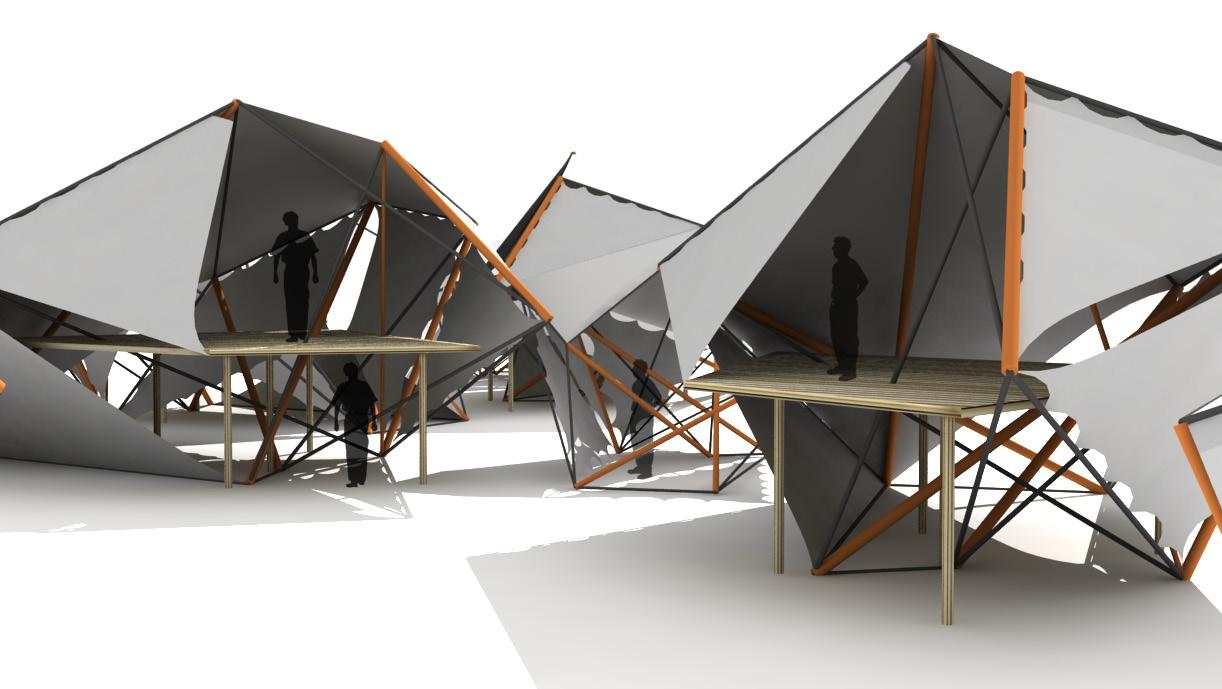
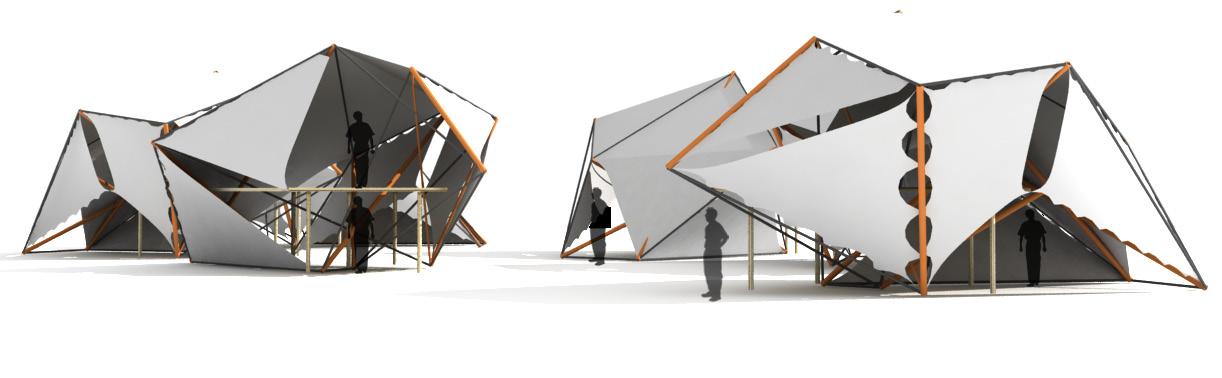
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 104
Design
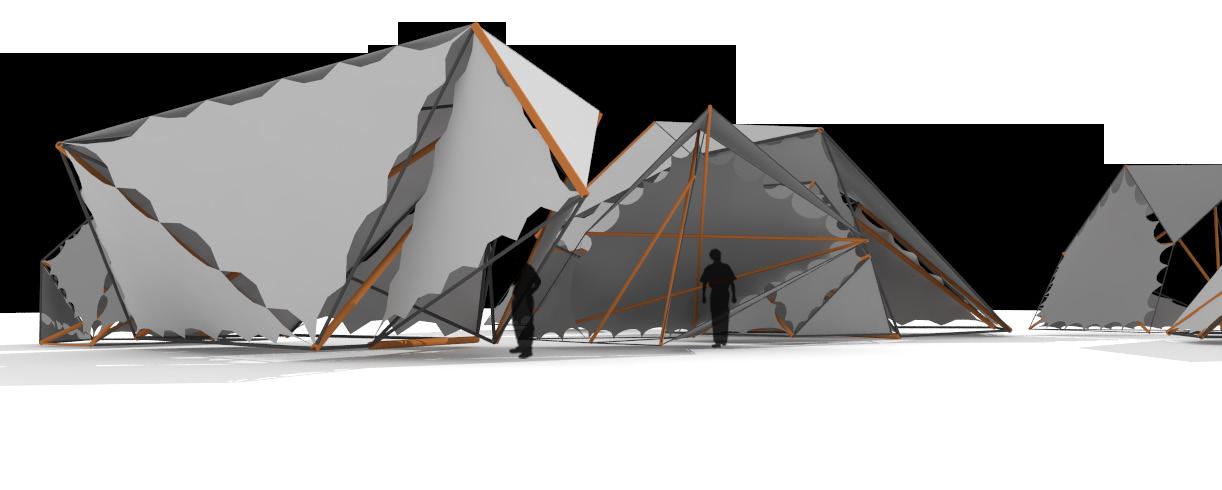
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 105 Design
Chapter 07 : Conclusion
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 107
Conclusion
Conclusion
The primary goal of simulating irregular tensegrity structures is fairly achieved, especially at digital level. Use of digital scripting tools to predict structural behaviour and formulation of generative form-finding process helped in exploring vast design domain of irregular tensegrity structures which has previously been very sparsely explored. The feed-back loop coupled with intense evaluation, optimization and adaptation stages helped in efficiently selecting potentially usable design modules.
Applying the system for the design of temporary shelters was an attempt to address the issues related to the existing types of temporary shelters. The design addresses the issue of having optimum usable area with fabrication constraints of irregular tensegrity structure by generating variation and hierarchy of the modules. In the design developed, variations and hierarchy is achieved even by having structural modularity. The design was successful in integrating the concept of modularity while providing a tailored solution thus finding a balance between ease of fabrication and a design reflecting varying social and cultural needs. The design is successful to a certain extent in testing the concept for different user needs in the same site. The construction logic adopted makes it feasible for the modules to be transported, assembled and re-assembled quickly.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 108
Conclusion
One of the limitations of the project is to incorporate the inputs of the physical experiments in the form-finding and the analysis stages. This however, is also due to the tedious methods for making irregular tensegrity modules, making exploratory process difficult to follow.
One of the advantages of the tensegrity structures is that it has no redundant parts. But in case of designing tensegrity structures for the use of temporary shelters, this proves to be a disadvantage as removal of any component of the unit will result in its collapse. This issue can be resolved through designing of nested tensegrity structures. Thus the further scope of the project can be digital and physical exploration of nested tensegrities to provide a robust solution.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 109
Conclusion
Appendix
APPENDIX A
History of Tensegrity
Definitions
APPENDIX B
Analytical methods
Classification
APPENDIX C
Regular tensegrities
Irregular tensegrities
Evaluation stage I
Evaluation stage II
Strand analysis
Mathematical theory of relaxation
Pseudocode
Generative algorithm script
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 111
Appendix
Appendix A
History
of Tensegrity
BACKGROUND
Until the last century, the technique of construction and the philosophy of building have been very simple with everything being held in place by weight, so the continuities of stress were basically compressive. Tensegrity structures are based on a quite an inverse concept wherein instead of the “weight and support” strategy, a “system of equilibrated omnidirectional stresses” is integrated. Furthermore, the system need not be supported as it is self-equilibrated and pre-stressed, thus independent of gravitational forces for equilibrium.
Tensegrities are spatial, reticulated and lightweight structures that basically consist of isolated compression members (rigid bars) suspended by a continuous network of tension members (cables). These highly intriguing structures, especially for their unique visual qualities and topological characteristics, were first developed by artist Kenneth Snelson in 1948 as well as independently by David Emmerich. Buckminster Fuller further developed Tensegrity structures from Snelson’s ideas by applying engineering principles to the study. He also coined the term Tensegrity from “tensile integrity” as the integrity or stability of the system comes from the tension members. As implied by their name, Tensegrity structures to dynamic loading and exhibit non-linear behavior.
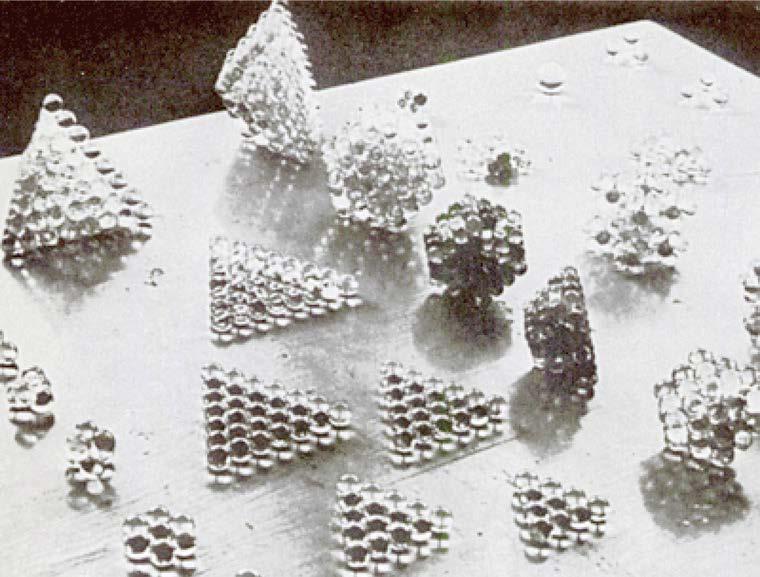
Http://chemoton.Wordpress.Com/2009/07/03/tensegrity
ANALOGIES
The most primitive and simple case of stressed structures is the kite. This antique toy is simply based on two crossed sticks with a tensioned string around it, joining the four extremes defined by them. Snelson achieved his first Tensegrity sculpture from kite-like modules out of plywood. One of the most common analogies has been the comparison between Tensegrity and pneumatic structures. The inflatable constructions can be considered as Tensegrities because they are self-equilibrated systems composed by an exterior tensile component which embraces the atoms of gas behaving as discontinuous components in compression. Both, Tensegrities and pneumatics, are compressible, expandable, self balanced, elastic, lightweight and local-load-distributing structures.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 112
Buckminster Fuller, in 1962, in his patent, describes Tensegrity structures (tensional-integrity systems) as “a plurality of discontinuous compression columns arranged in groups of three non-conjunctive columns connected by tension elements forming tension triangles”.
David G. Emmerich, declared in his patent that his invention could be further described in a non-limitative manner with reference to several examples.
Kenneth Snelson, in 2004, described Tensegrity Structures or the “floating compression structures”, as he called them, as “Tensegrity describes a closed structural system composed of a set of three or more elongate compression struts within a network of tension tendons, the combined parts mutually supportive in such a way that the struts do not touch one another, but press outwardly against nodal points in the tension network to form a firm, triangulated, prestressed, tension and compression unit.”
Anthony Pugh , in 1976, gave the almost universally accepted characterization: “A Tensegrity system is established when a set of discontinuous compressive components interacts with a set of continuous tensile components to define a stable volume in space.”
Schodeck, in 1993, defined Tensegrities based on redundancies and degrees of freedom as “rigid structures made of discontinuous rods in compression and continuous cords in tension in which each component has one degree of member redundancy.”
Bin-Bing Wang, in 1998 identified that the Tensegrity structures are self-supporting and rigidified by self-stressing and gave a wider definition: “Tensegrity systems are freestanding pin-jointed cable networks in which a connected system of cables are stressed against a disconnected system of struts and extensively, any free-standing pin-jointed cable networks composed of building units that satisfy aforesaid definition.”
Kanchanasaratool and Williamson, in 2002, stated that a Tensegrity system is a stable connection of axially-loaded members, being a Class k Tensegrity structure if at most “k” compressive members are connected to any node. E.g., a traditional Tensegrity structure is a class 1 structure because only one compression member makes a node.
Ariel Hanaor described Tensegrity structures as “internally prestressed, free-standing pin-jointed networks, in which the cables or tendons are tensioned against a system of bars or struts”.
Miura and Pellegrino, in 2002, gave a narrower interpretation: “A Tensegrity structure is any structure realized from cables and struts, to which a state of prestress is imposed that imparts tension to all cables”, adding later, “the state of prestress serves the purpose of stabilizing the structure, thus providing first-order stiffness to its infinitesimal mechanisms.”
René Motro, in 2003 tried to distinguish two different concepts. He makes the distinction between the “patent based” and the “extended” definition. Patent based definition is “Tensegrity systems are spatial reticulate systems in a state of self-stress. All their elements have a straight middle fibre and are of equivalent size. Tensioned elements have no rigidity in compression and constitute a continuous set. Compressed elements constitute a discontinuous set. Each node receives one and only one compressed element.” While the extended definition is “Tensegrity system is a system in a stable self-equilibrated state comprising a discontinuous set of compressed components inside a continuum of tensioned components.”
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 113 Definitions Appendix A
Analytical
methods
Introduction
A key step in the design of tensegrity structures is the determination of their geometrical configuration, known as form-finding. Early studies by Fuller, Snelson and Emmerich into the form of tensegrity structures used mainly regular, convex polyhedra as the basis for finding new configurations. However, physical models of these structures showed that proper form-finding methods are needed to find the equilibrium configuration of even the simplest tensegrity structure. The methods explored by various researchers can be broadly classified into:
A. Kinematical Methods
B. Statistical Methods
A. Kinematical Methods
The characteristic of these methods is that the lengths of the cables are kept constant while the strut lengths are increased until a maximum is reached. Alternatively, the strut lengths may be kept constant while the cable lengths are decreased until they reach a minimum. This approach mimics the way in which tensegrity structures are built in practice, without explicitly requiring that the cables be put in a state of pretension.
1. Analytical Solutions
A compact description of the geometry of this problem, taking advantage of its symmetry, was introduced by Connelly and Terrell, as follows. In the starting configuration the lateral cable, 1 2, is vertical and the angle between the ends of the strut is 2πj/v where j is an integer smaller than v. The coordinates of nodes 1–5 are:
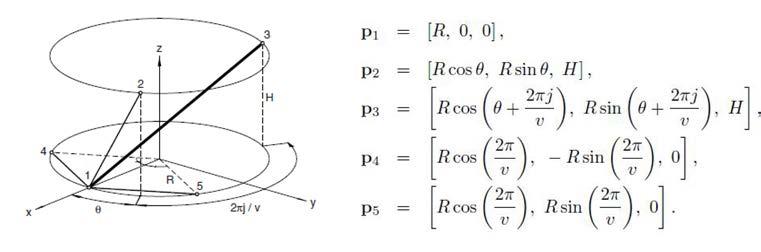
2. Non-Linear Programming
This general method, proposed by Pellegrino, turns the form-finding of any tensegrity structure into a constrained minimisation problem. Starting from a system for which the element connectivity and nodal coordinates are known, one or more struts are elongated, maintaining fixed length ratios, until a configuration is reached in which their length is maximized. The general constrained minimization problem has the form:
where the objective function f(x, y, z) is, for example, the negative length of one of the struts. Pellegrino applied this method to two tensegrities: the triangular prism and the truncated tetrahedron.
3. Dynamic Relaxation
The Dynamic Relaxation method has good convergence properties for structures with only a few nodes but is not effective when the number of nodes increases. Also, the method becomes rather cumbersome if several different ratios between strut lengths and cable lengths are desired, which restricts its applicability to less regular structural forms. For a structure in a given initial configuration and subject to given external forces the equilibrium of configuration can be computed by integrating the following fictitious dynamic equations
Where K is a stiffness matrix, M a mass matrix, D a damping matrix, f the vector of external forces, and ¨d, ˙d and d the vectors of acceleration, velocity and displacement from the initial configuration, respectively. Both M and D are taken to be diagonal, for simplicity, and the velocities and displacements are initially set to zero.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 114
Appendix B
b. Statical Methods
The general characteristic of these methods is that a relationship is set up between equilibrium configurations of a structure with given topology and the forces in its members. This relationship is then analyzed by various methods.
1. Analytical Solutions
Kenner used node equilibrium and symmetry arguments to find the configuration of the expandable octahedron, whose six identical struts are divided into three pairs and the distance between the struts in each pair is exactly half the strut length. Other, more complex, spherical tensegrities with polyhedral geometries, i.e. the cuboctahedron and the icosidodecahedron, were also analyzed using the same approach.
Denoting by qij the force density in element ij, note that q1,4 = q1,5 due to symmetry the equilibrium of node 1 in the z- and y-direction can be written as
2. Force Density Method
The force density method for cable structures, first proposed by Linkwitz and Schek in 1971, uses a simple mathematical trick to transform the non-linear equilibrium equations of the nodes into a set of linear equations. For example, the equilibrium equation in the x-direction for node i is
3. Energy Method
Connelly and Back have analyzed tensegrity structures with different types of symmetry using this method. Their initial assumption was that there is a symmetric state of self-stress with a force density of 1 in each cable and −ωs in each strut. A further assumption was that there are two types of cables but
only one type of strut, arranged such that satisfying equilibrium at only one node of the structure implies, by symmetry, that it is satisfied also at all other nodes. The force density in the strut is chosen such that the structure is super stable. A complete catalogue of all the tensegrity structures that are possible for each symmetry group has been produced, using group theory. Although some of the systems in the catalogue have struts that go through each other, and therefore are of limited practical interest, the catalogue contains many solutions that were previously unknown. In analogy with the total potential energy, defines the following energy form associated with the stress ω:
4. Reduced Coordinates
This method was introduced by Sultan. Consider a tensegrity structure whose b elements consist of M cables and O struts. The struts are considered as a set of bilateral constraints acting on the cable structure. Hence, a set of independent, generalized coordinates g = [g1, g2, . . . , gN]T is defined, which define the position and orientation of these struts.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 115 Appendix B
Classification
Connection based:
A. Tensegrity
B. Geodesic
Morphology based:
The concern of form-finding is central in the study of Tensegrity structures and thus it becomes highly essential to understand this system and classifying based on its morphology. Tensegrity structures exhibit system behavior at various progressive levels ranging from simple cell simplex structure level to a more complex assembly level. Hence the first stage of classification would be on the basis of organizational criteria of being single morphology modules or hierarchically organized assemblies of simpler modules.
A. Single Morphologies
B. Assemblies
A. Single Morphologies
Single Tensegrity modules are essentially individual independent self-stressing stable arrangements of compressive and tensile components that balance out the forces and nodal stresses to establish equilibrium in space. The next level of classification of these single modules is based on the parametric properties of the components and the connection pattern resulting in Regular and Irregular morphologies.
1. Regular Morphologies
Regular Tensegrity structures inherently have same component parameters like strut length, cable lengths, connection patterns and rotation angle. Regular Tensegrity structures have been extensively studied, researched and analyzed in the field of Tensegrity structures. These regular structures can be further classified based on number of struts connecting at each node. A Tensegrity structure is classified as a structure of class ‘k’ when I has k number of struts connecting at each node.
i. Class 1
Class 1 Tensegrity structures essentially have only one strut connecting at each node and at least 3 cables balancing out the compressive strut forces by their tensile pull.
a. X-shape:
The basic idea developed by Snelson was contained in X-shape which is an assembly of two struts and four cables the whole system being in self equilibrium.
b. Prismatic Regular Tensegrity Cells:
The class of prismatic Tensegrity structures is defined as structures with n number of same length struts resulting in 2n number nodes arranged in 2 horizontal circles around + z axis, which is an n-fold symmetry axis. Within each circle, each node is connected to two other by horizontal cables and each node is connected diagonally to node in other planar circle by a strut and vertical cable.
c. Tensy-Polyhedra
Tensy-polyhedra geometries are basically developed by inserting struts inside regular polyhedron geometry to establish self stress state of equilibrium. David Emmerich used this form finding method to develop and design Tensegrity cells from regular polyhedron geometries. It was discovered that some geometries are stable while others are essentially unstable forms. Icosahedrons, expanded octahedrons and truncated tetrahedrons are standard examples of regular tensy-polyhedra structures.
ii. Class 2
Class 2 Tensegrity structures essentially have 2 struts connecting at each node and at least 4 cables balancing out the compressive struts forces by their tensile pull.
a. Tensegrity circuits
These systems are characterized by its components which are no longer single struts but chain of struts. Cuboctahedron and Mono-circuit tensy-polyhedron are good examples of these systems. The former geometry has triangular compressed components (each constituting a chain of strut) with a hexagon of tensile cables maintaining the equilibrium.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 116
Appendix B
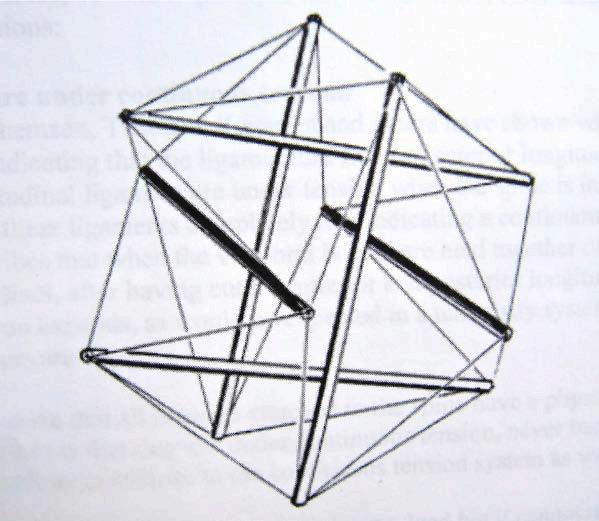
Http://ittcs.Wordpress.Com/2010/07/21/notes-on-anatomy-andphysiology-getting-the-feel-of-tensegrity/
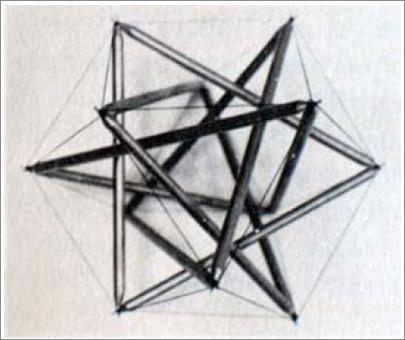
Http://tensegrity.Wikispaces.Com/cuboctahedron
B. Assemblies
1. Regular Assemblies
i. Class 1
a. Double-x , Triple-x:
Kenneth Snelson developed his X-shape modules further by assembling more than one to form Double-X and Triple-X shaped sculptures.
b. Tensegrity towers:
Tensegrity towers are vertical modular structures of simple prismatic Tensegrity modules assembled and arranged vertically with alternate clockwise and anticlockwise rotation of the module. Snelson’s needle tower is one good example of a built Tensegrity tower sculptures.
c. Tensegrity cloud:
The first attempt at developing complex systems based on changing parameters from regular components to multiparameter systems was undertaken by Nicolas Vassart mainly concerning with cytoskeleton in biology. As the exploration was difficult digitally, it was experimented in terms of physical models to develop final form.
ii. Class 2
a. Tensegrity rings
Anthony Pugh experimented with these assemblies where the formal development evolved from using symmetric prismatic structures following a certain process resulting into hollow tube shaped Tensegrity cells called the Tensegrity rings. The foldability and deployability of these structures make them essentially useful for temporary structures.
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 117
Appendix B
Appendix C
Regular
tensegrities
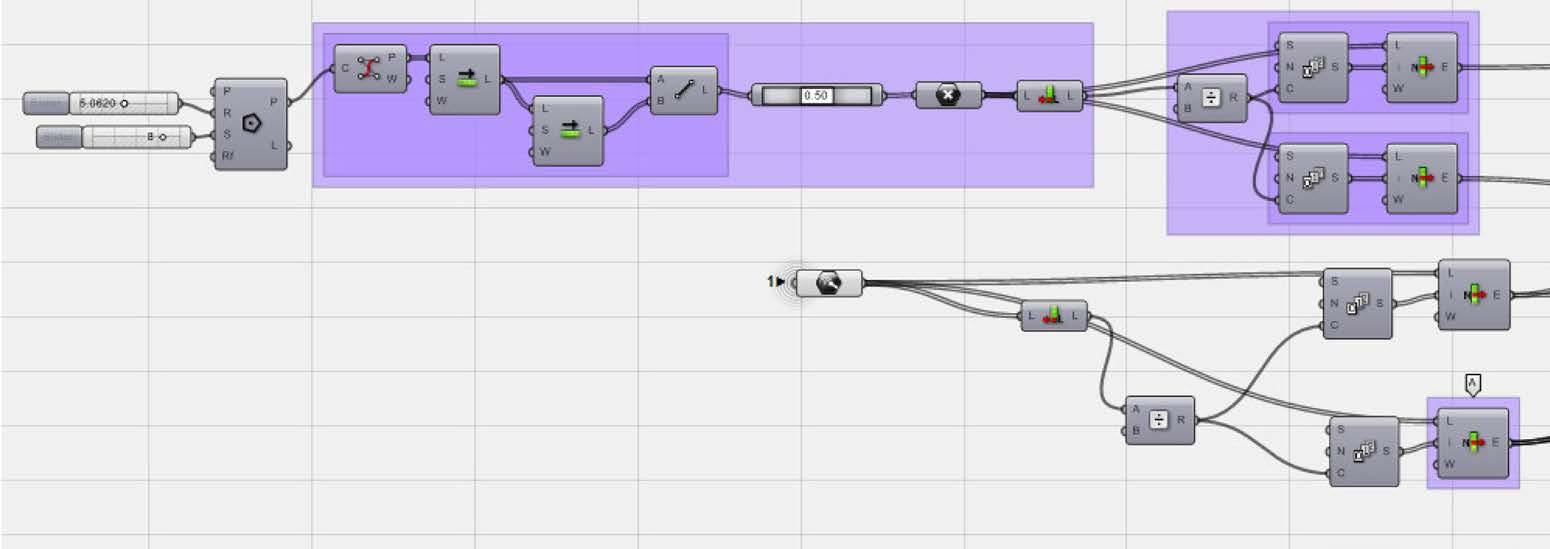
GS definition for truncated polyhedra
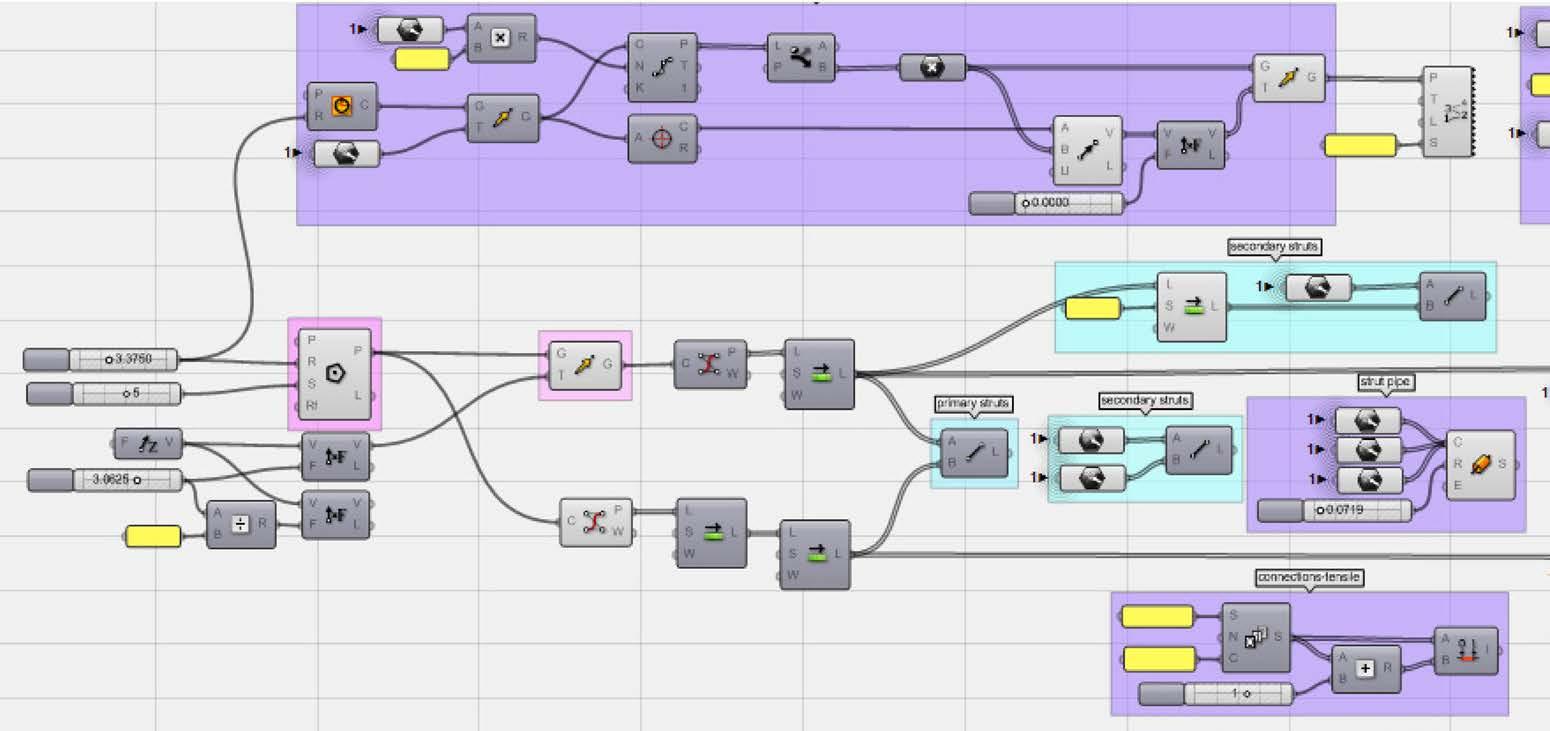
GS definition for tensegrity rings
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 118
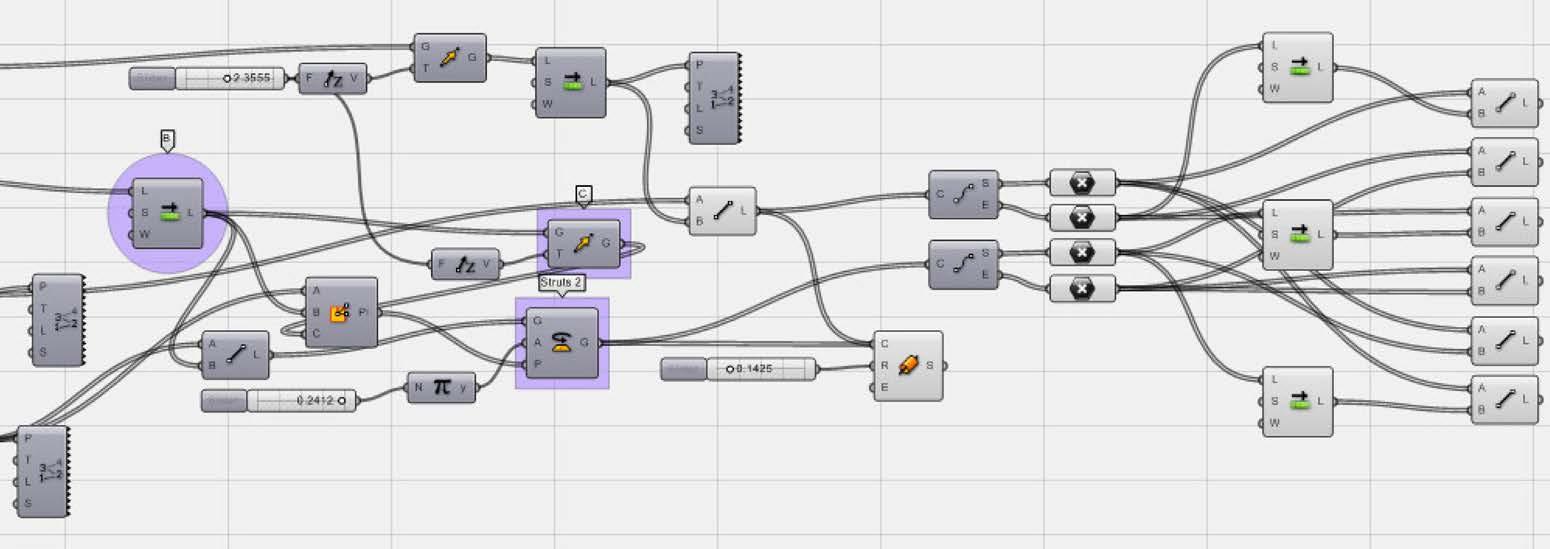
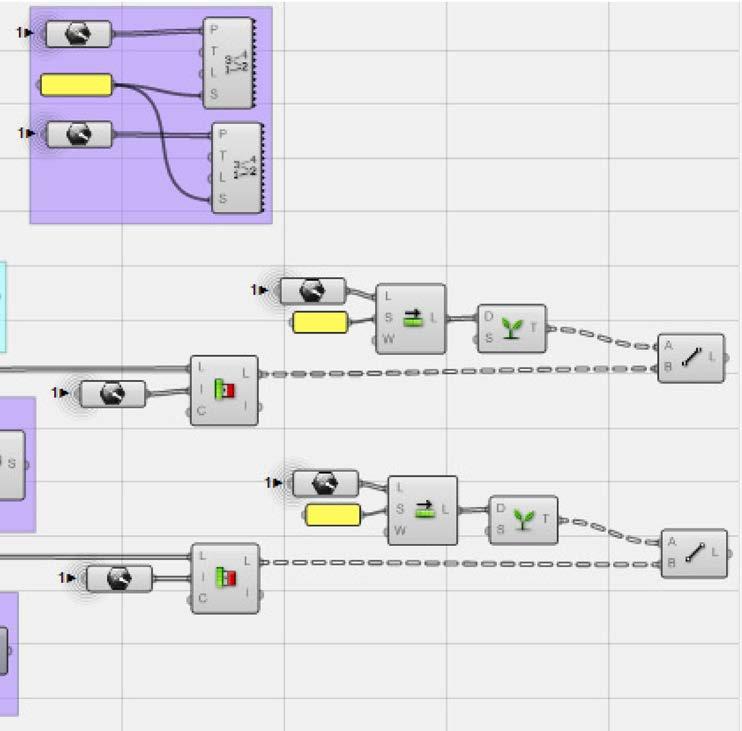
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 119 Appendix C
Parametric models of truncated polyhedra
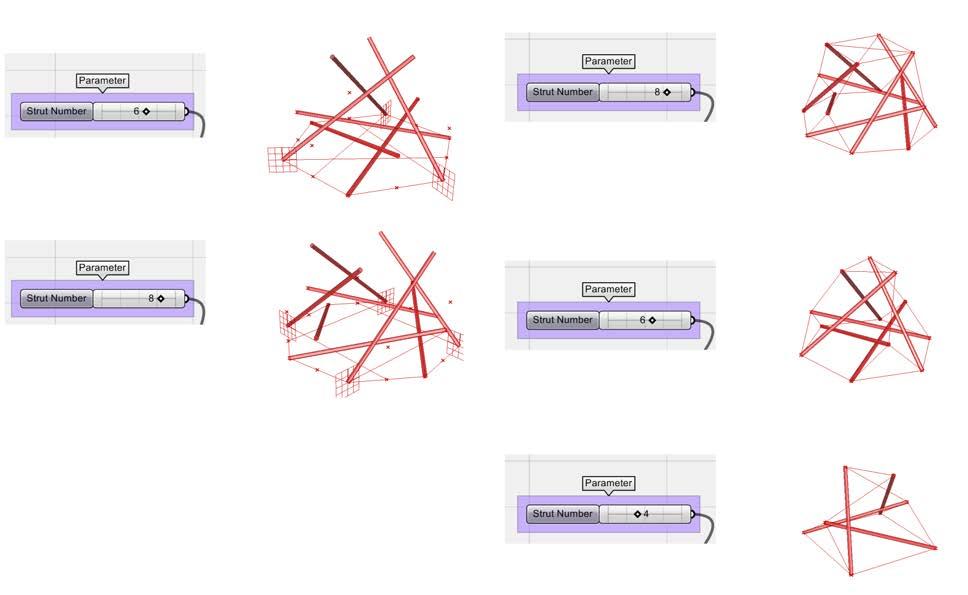
Parametric models of tensegrity ring
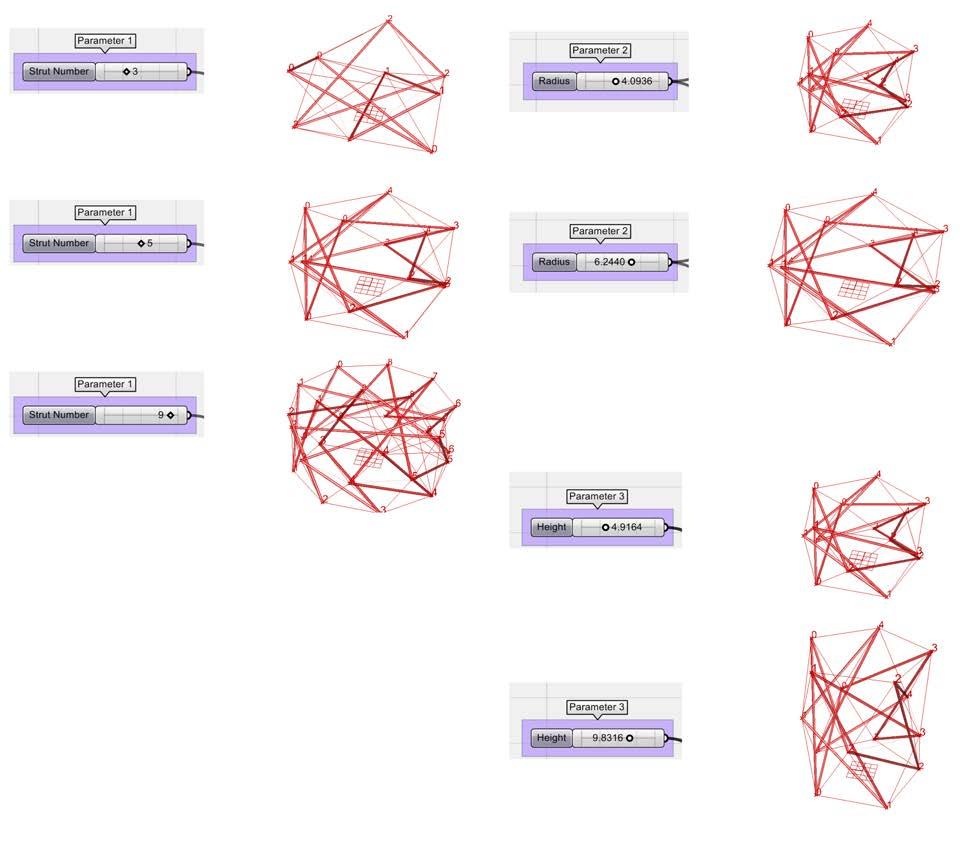
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 120
Appendix C


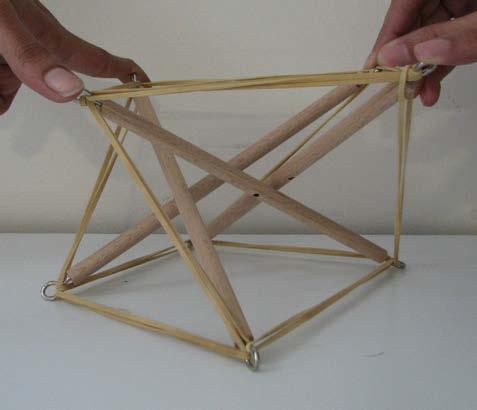
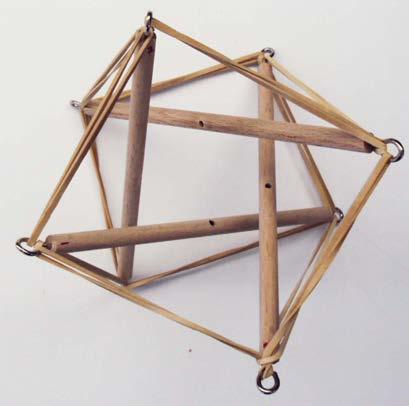
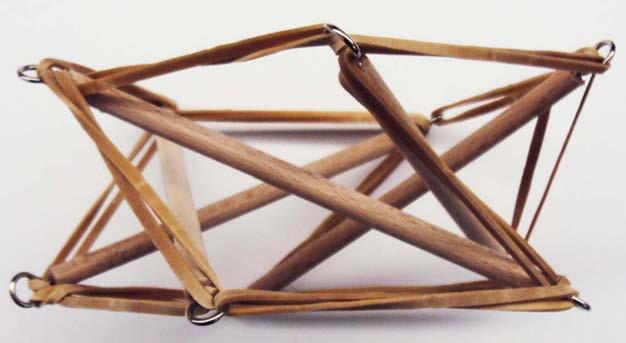

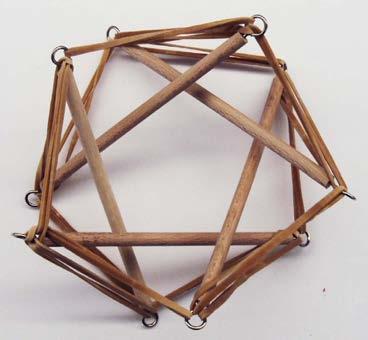
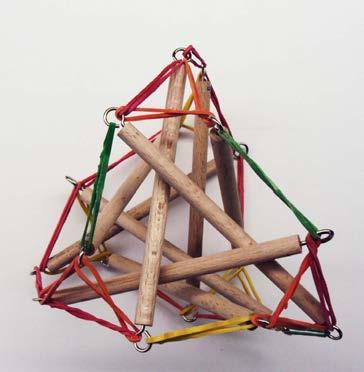

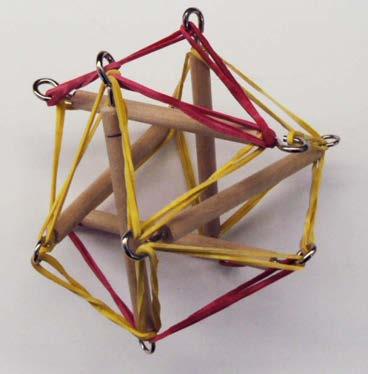

RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 121 Appendix C
3 Strut tensegrity module
4 Strut tensegrity module: model tested for deformation
5 Strut tensegrity module: model tested for deformation
9 Strut tensegrity module
6 Strut tensegrity module
Appendix C
Irregular tensegrities
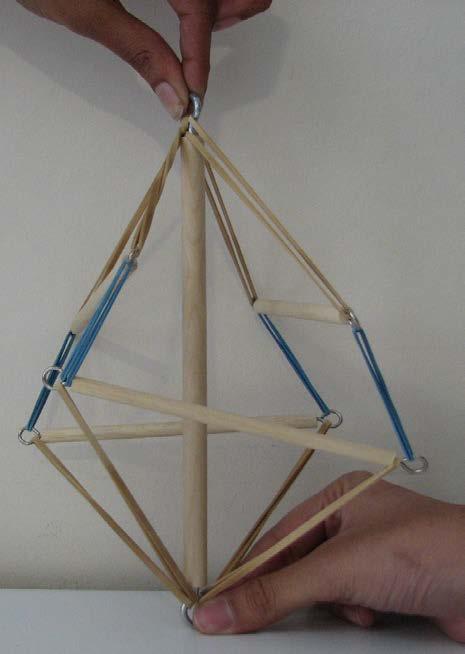
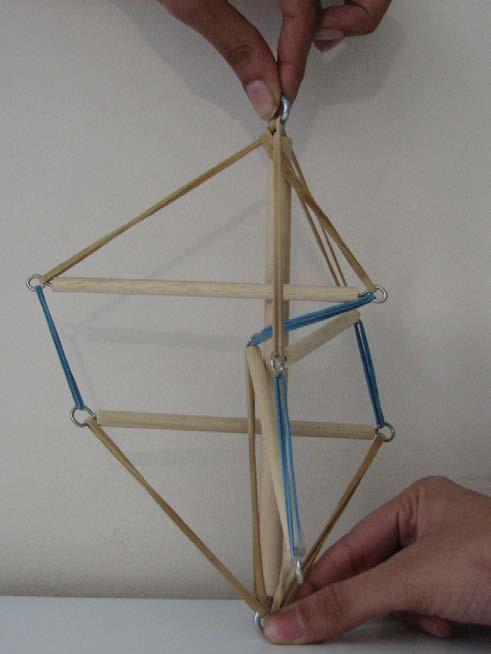
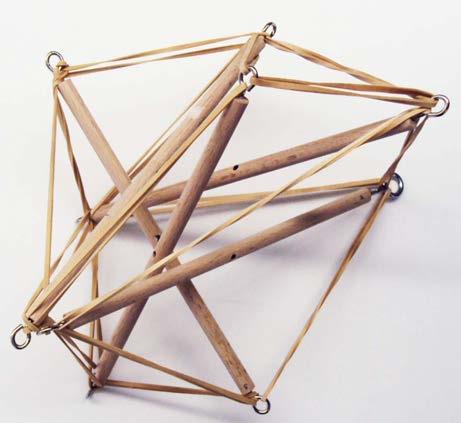
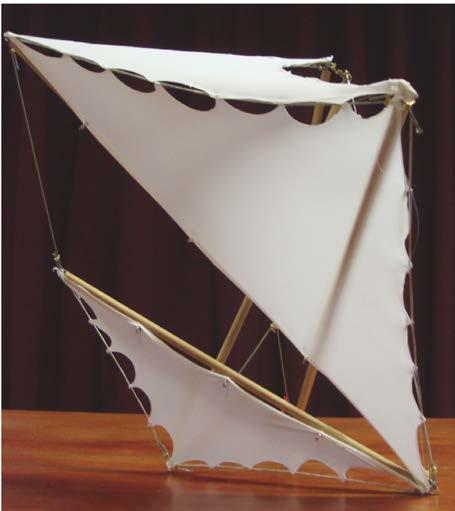


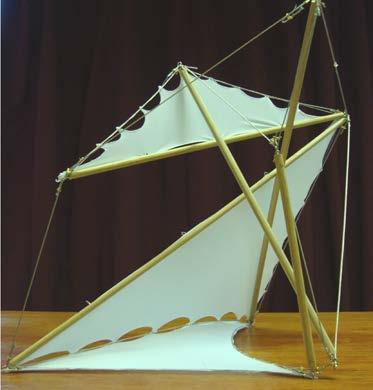
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 122
5 Strut irregular tensegrity module with its multiple stable states
5 Strut irregular tensegrity module
5 Strut selected irregular tensegrity module
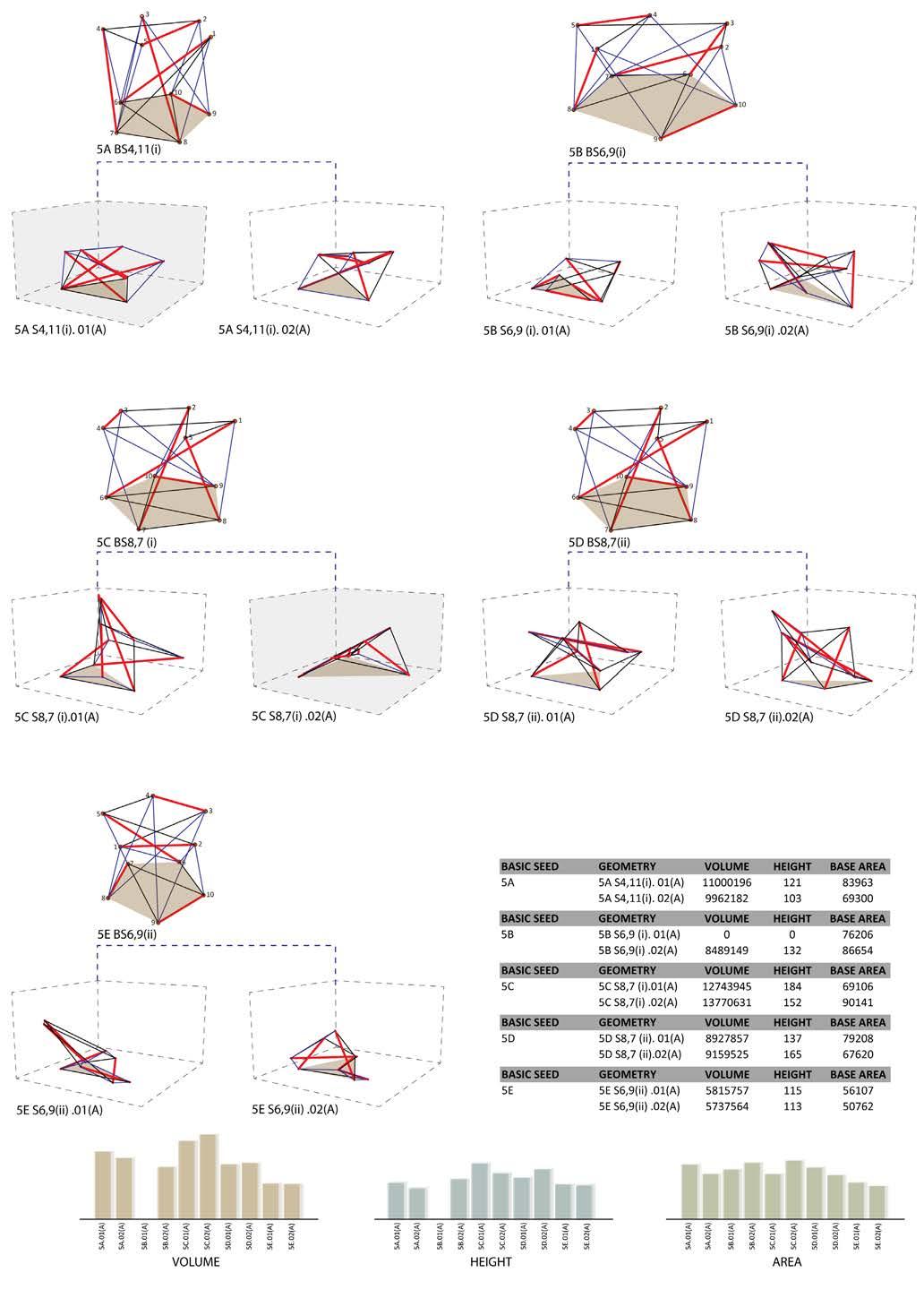
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 123 Appendix C Evaluation stage I- 5 strut
Evaluation stage I- 6 strut
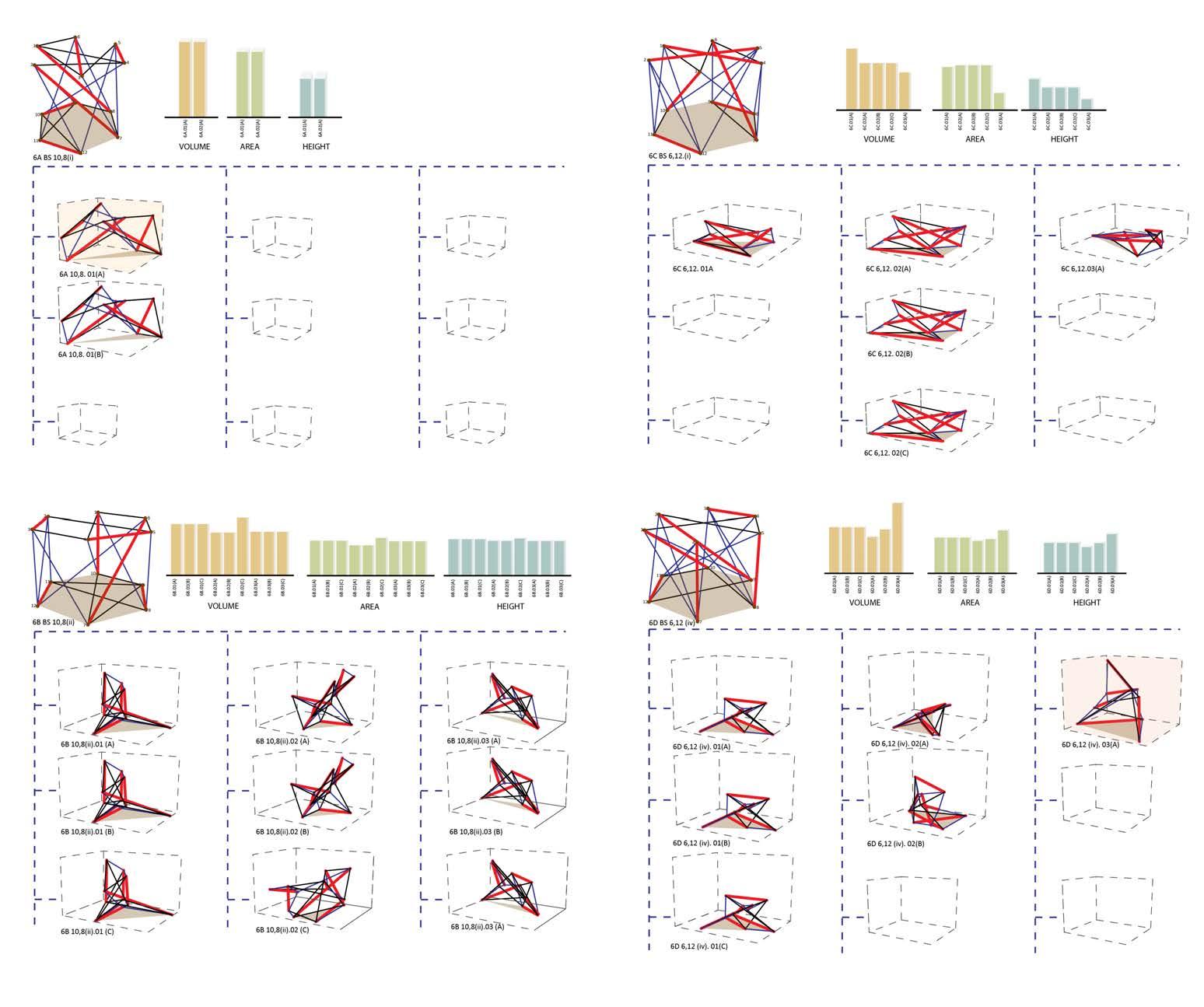
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 124
Appendix C
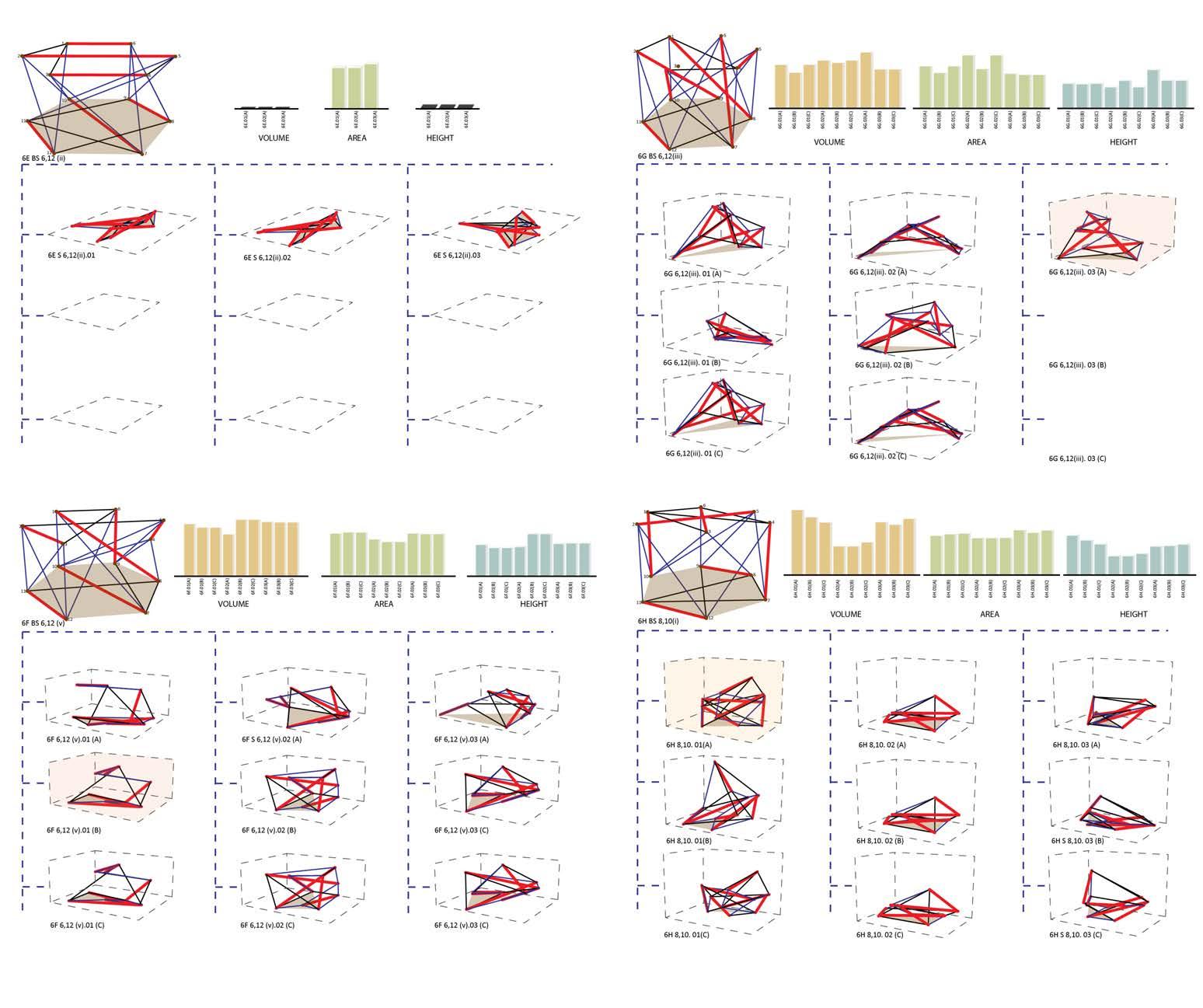
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 125 Appendix C
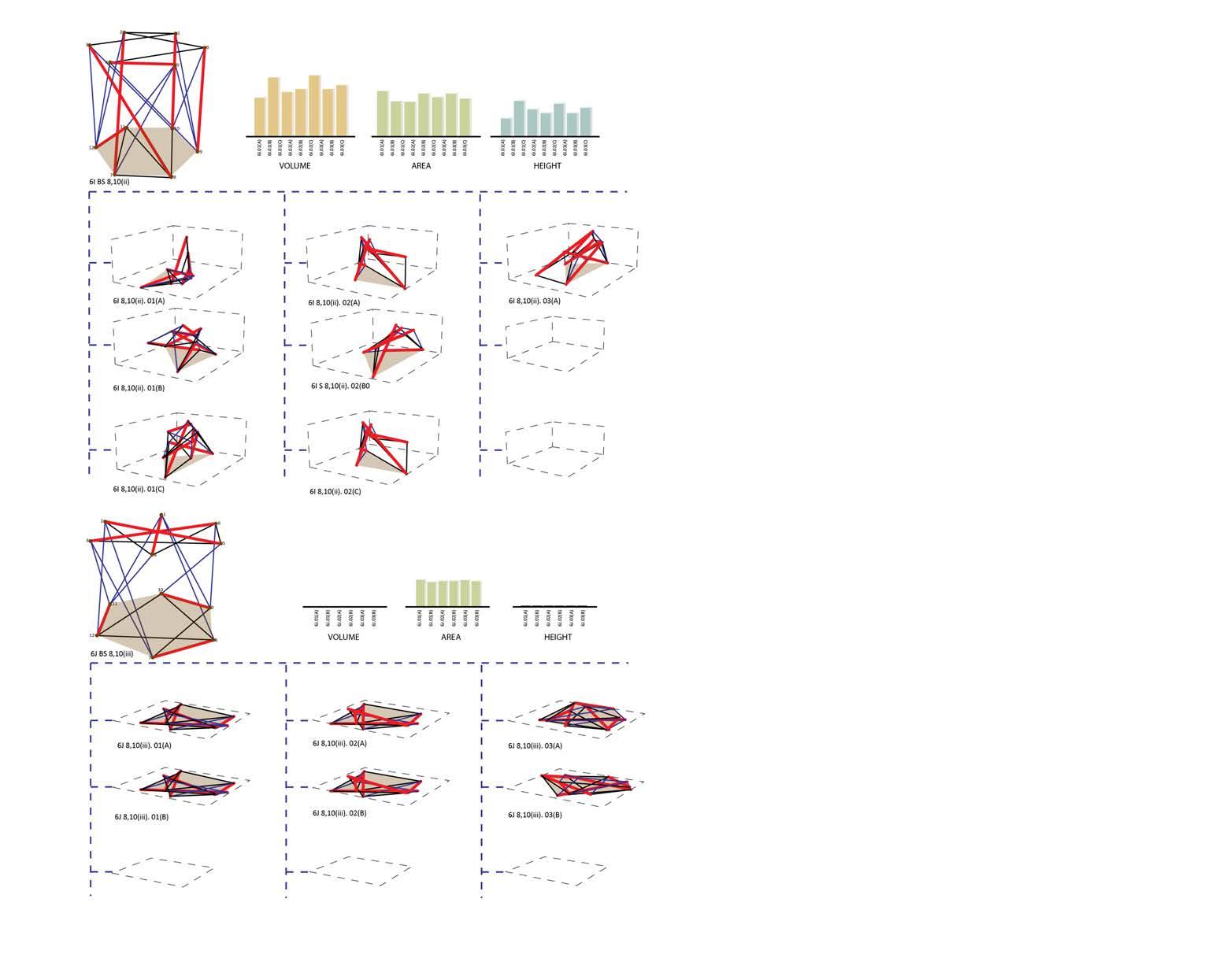
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 126 Appendix C
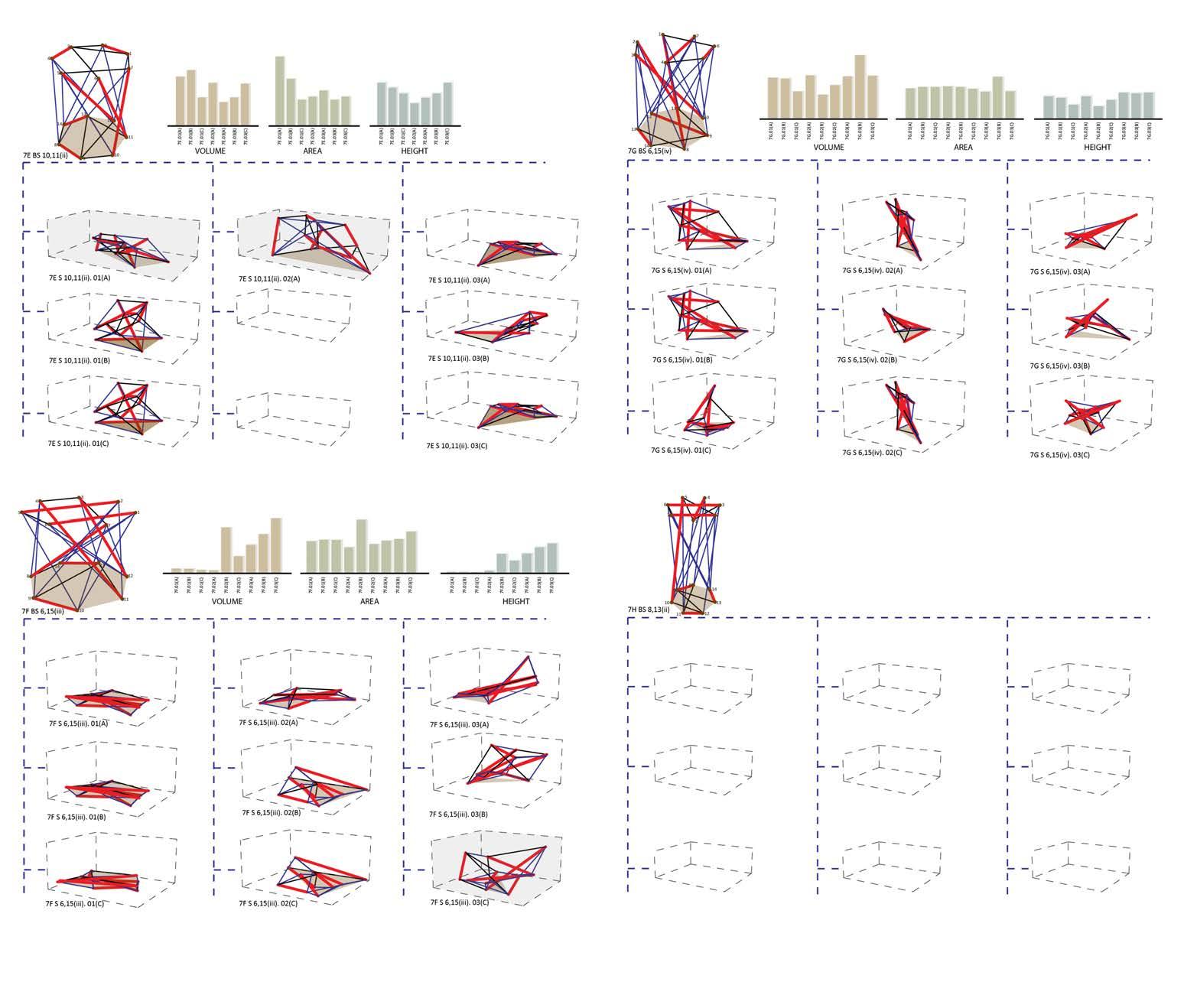
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 127 Appendix C Evaluation stage I- 7 strut
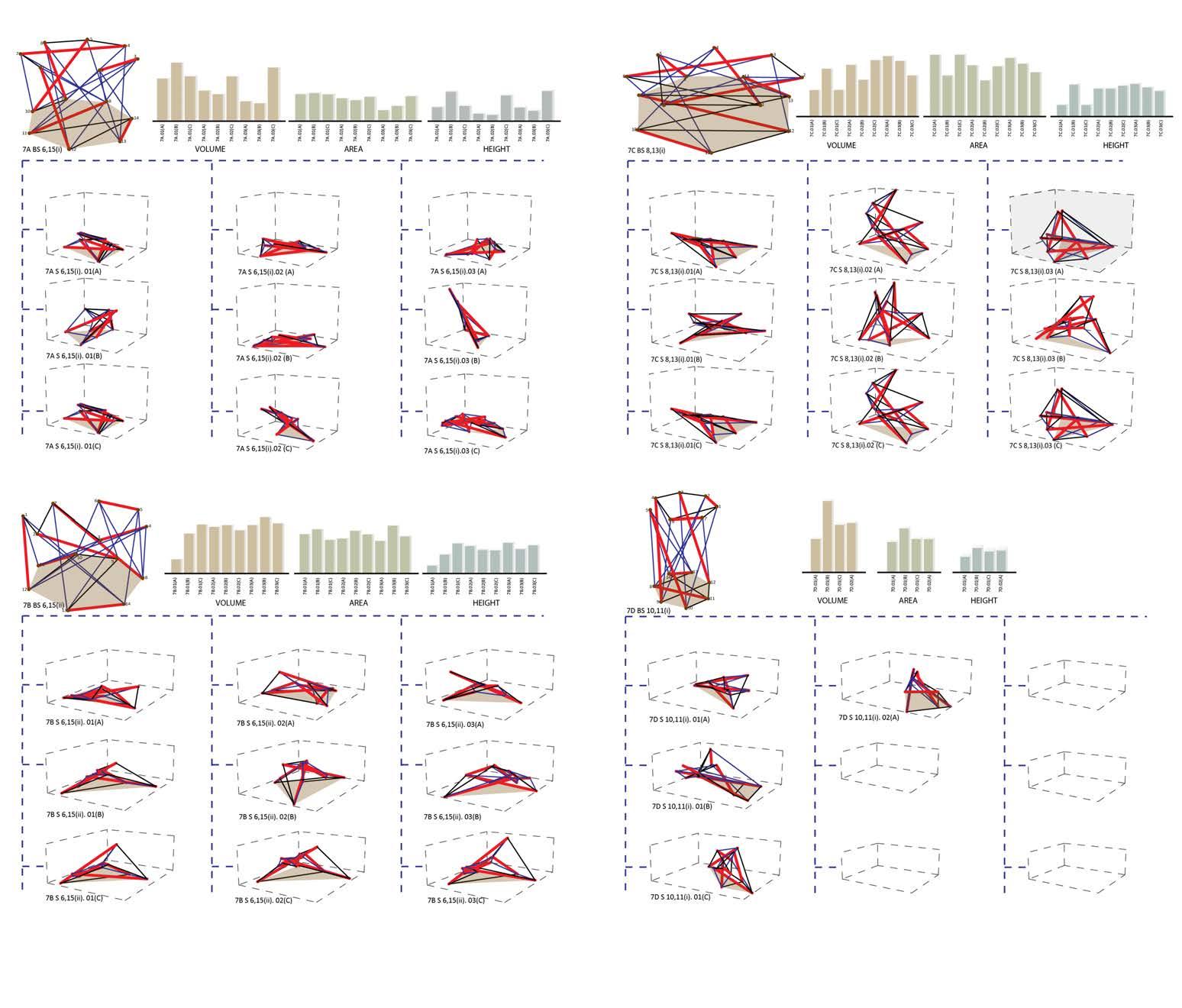
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 128 Appendix C
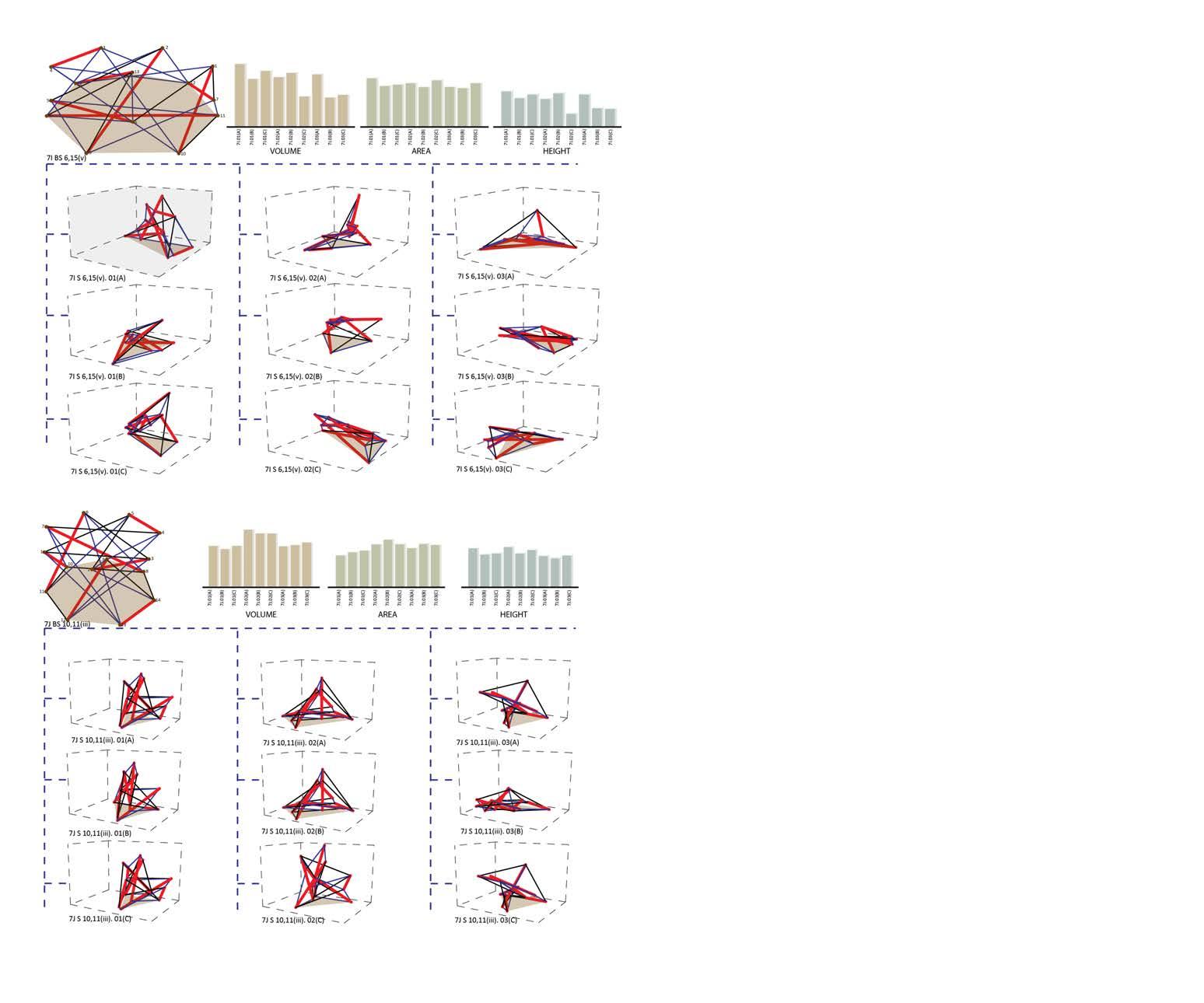
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 129 Appendix C
Evaluation stage I- 8 strut
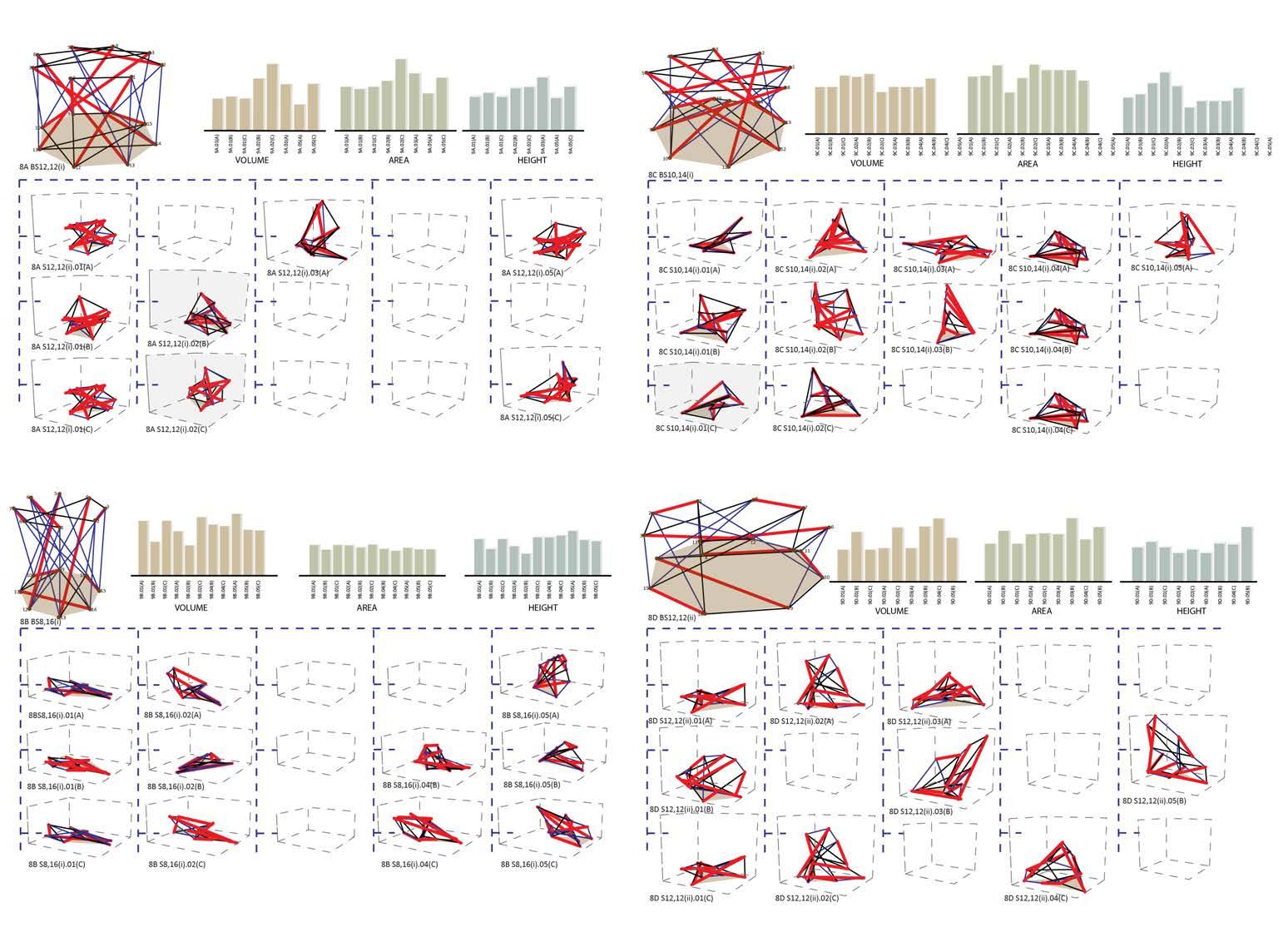
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 130
Appendix C
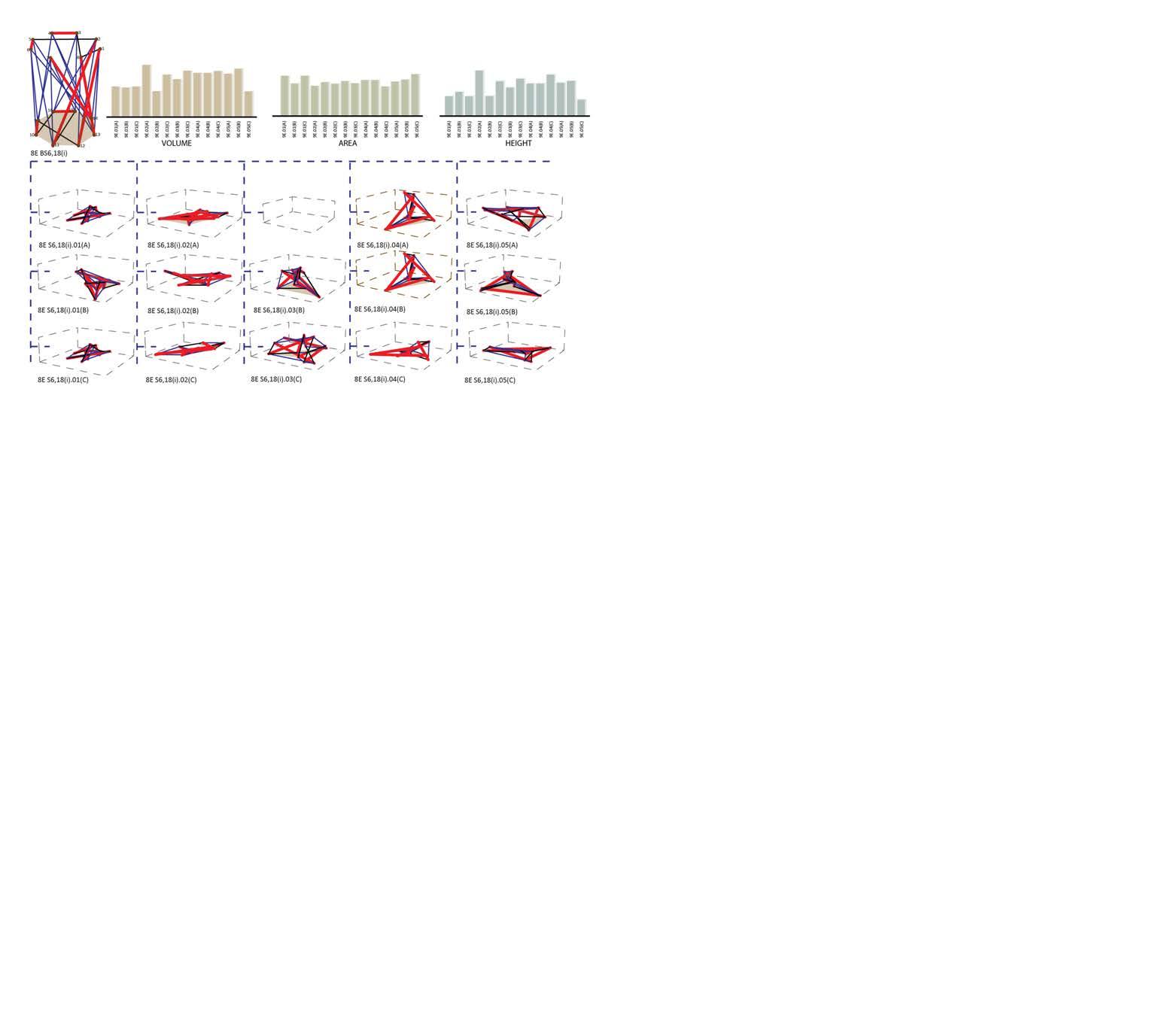
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 131 Appendix C
Evaluation stage I- 9 strut
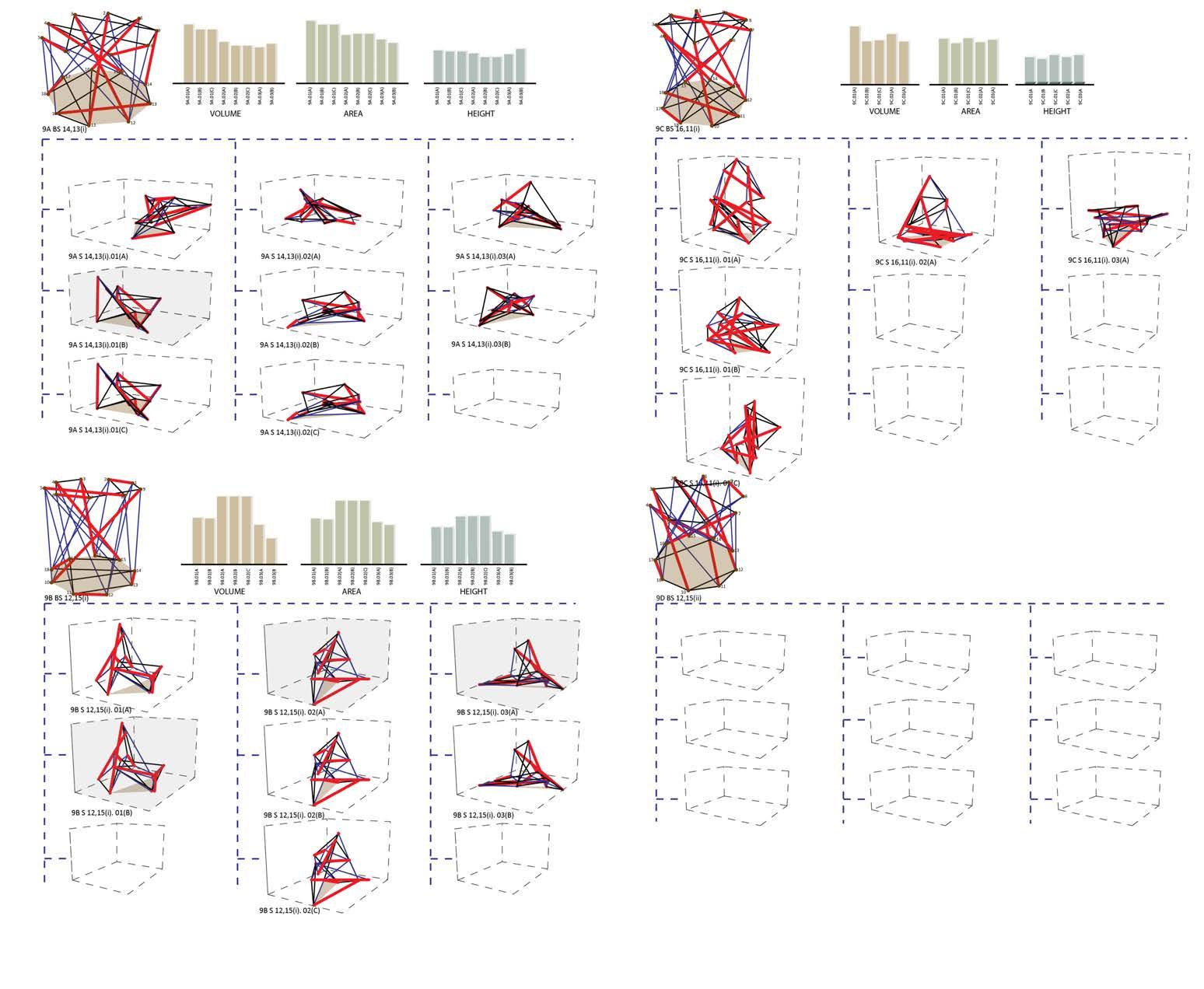
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 132
Appendix C
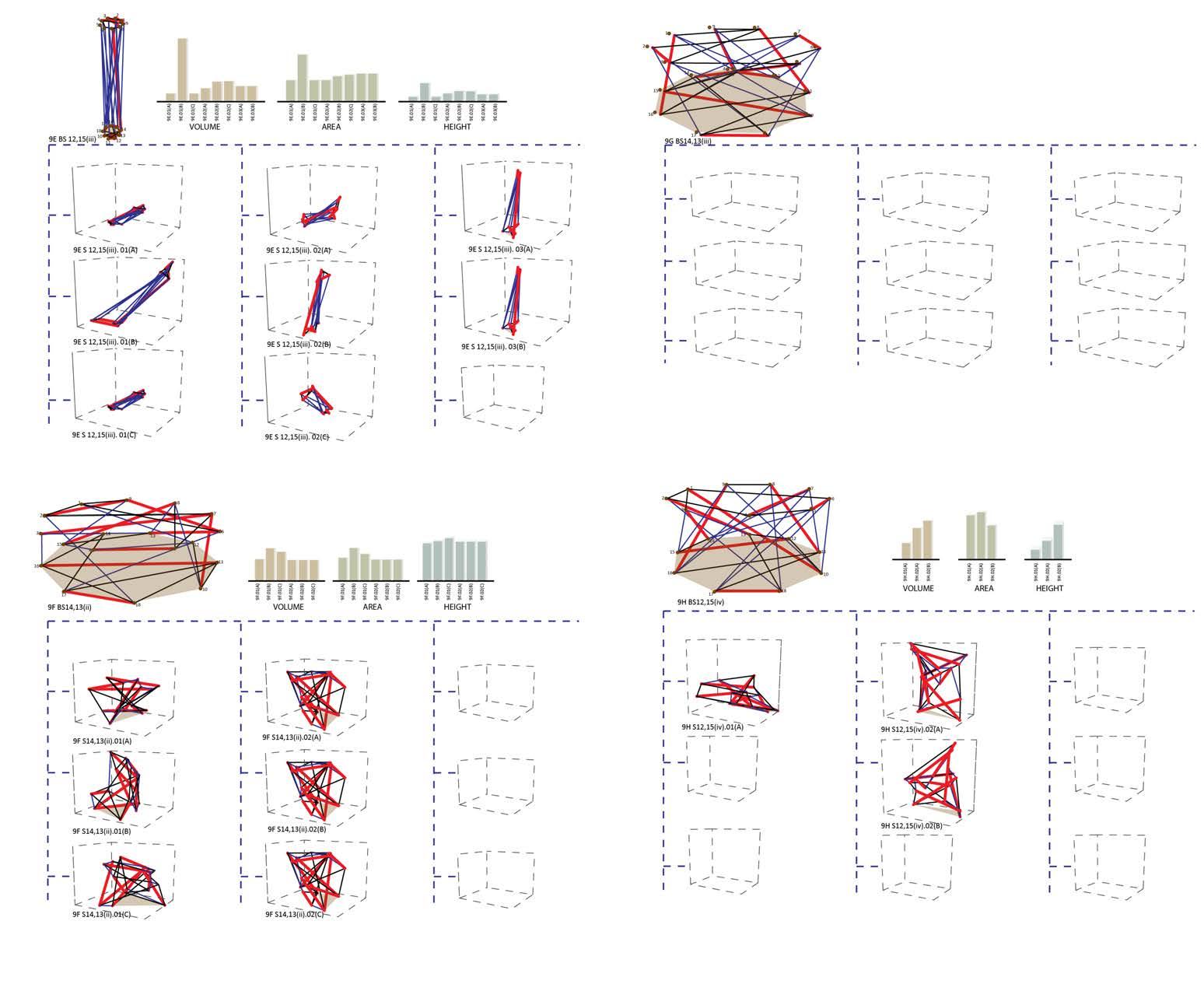
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 133 Appendix C
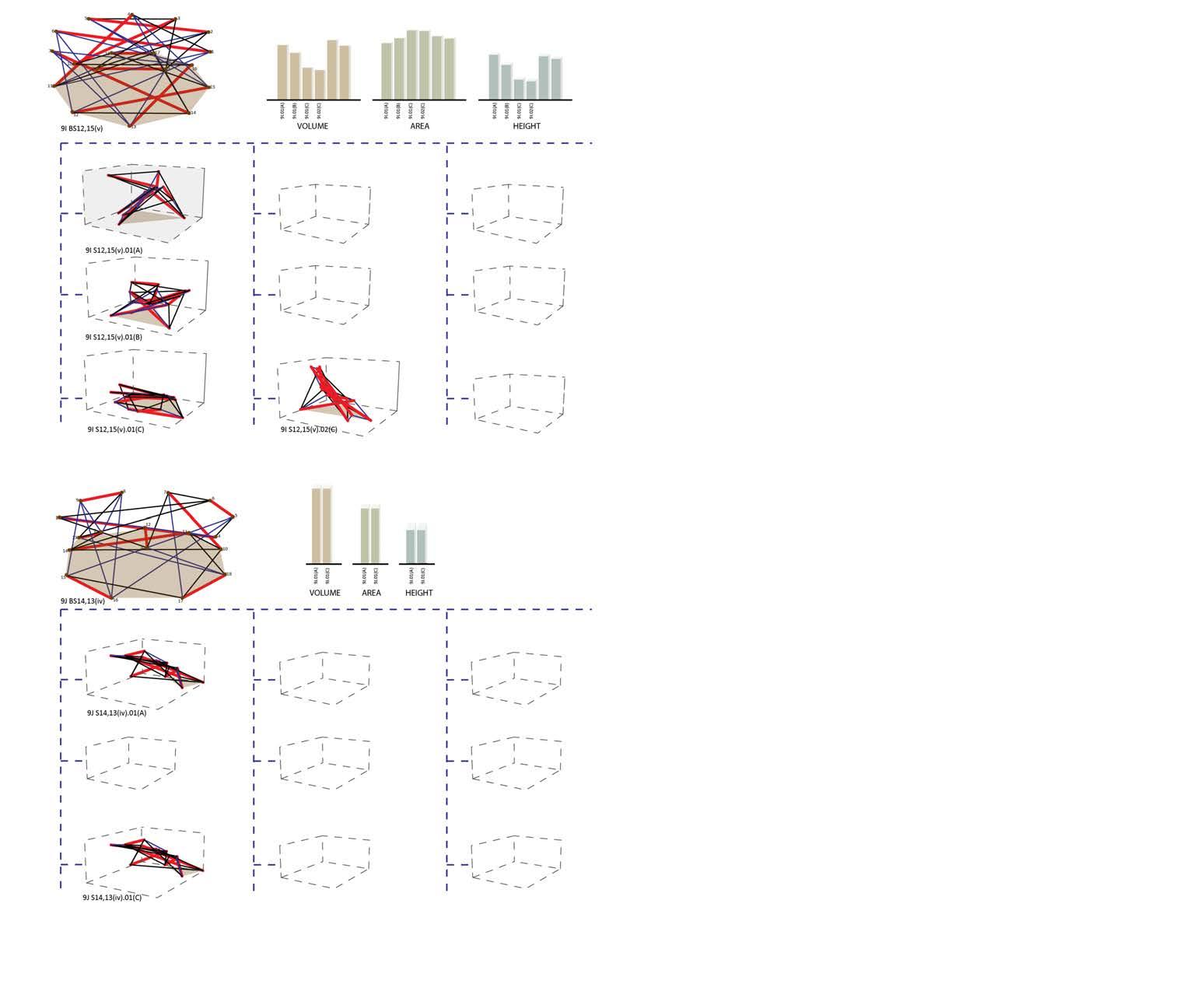
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 134 Appendix C
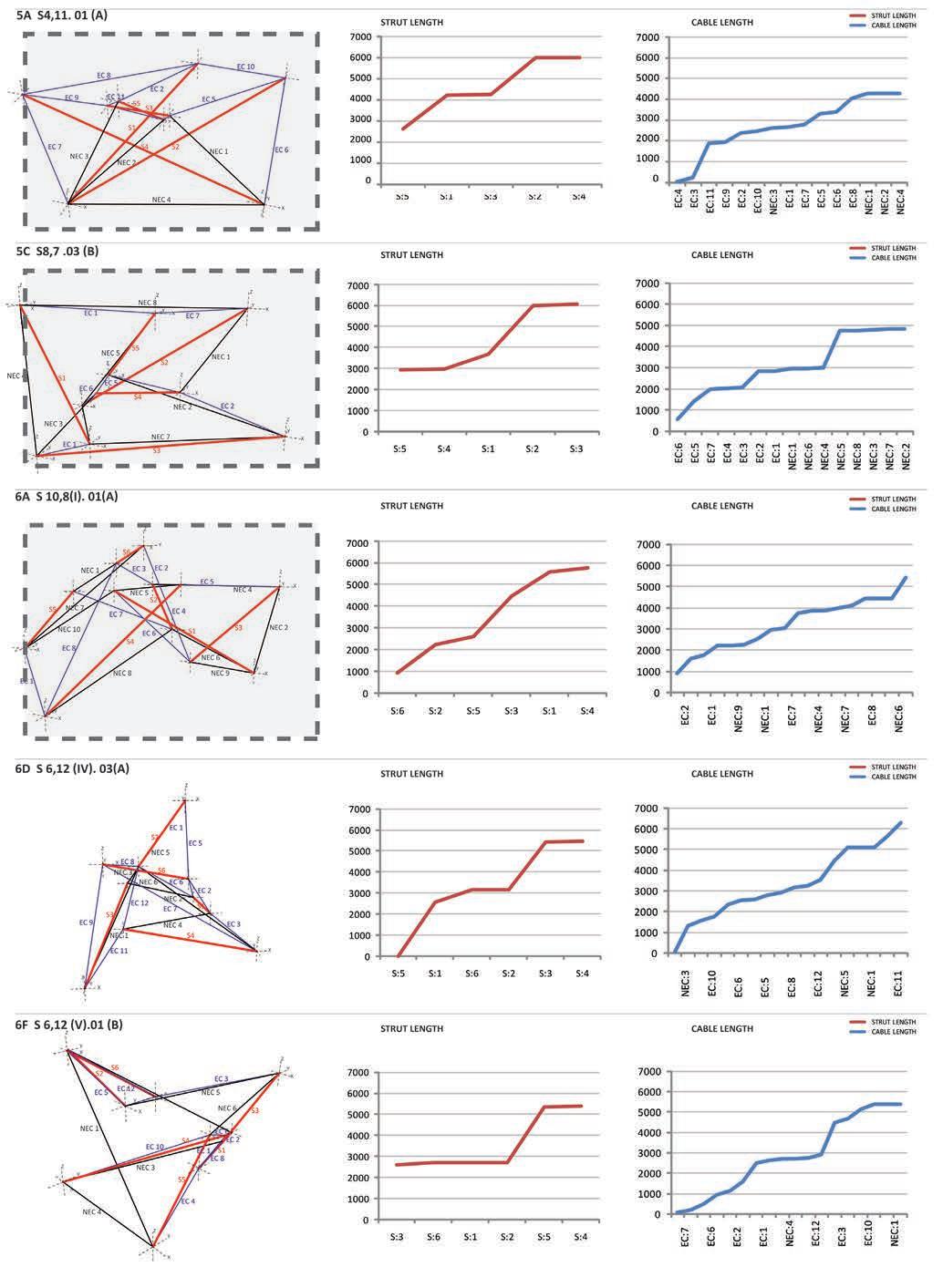
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 135 Evaluation stage II Appendix C
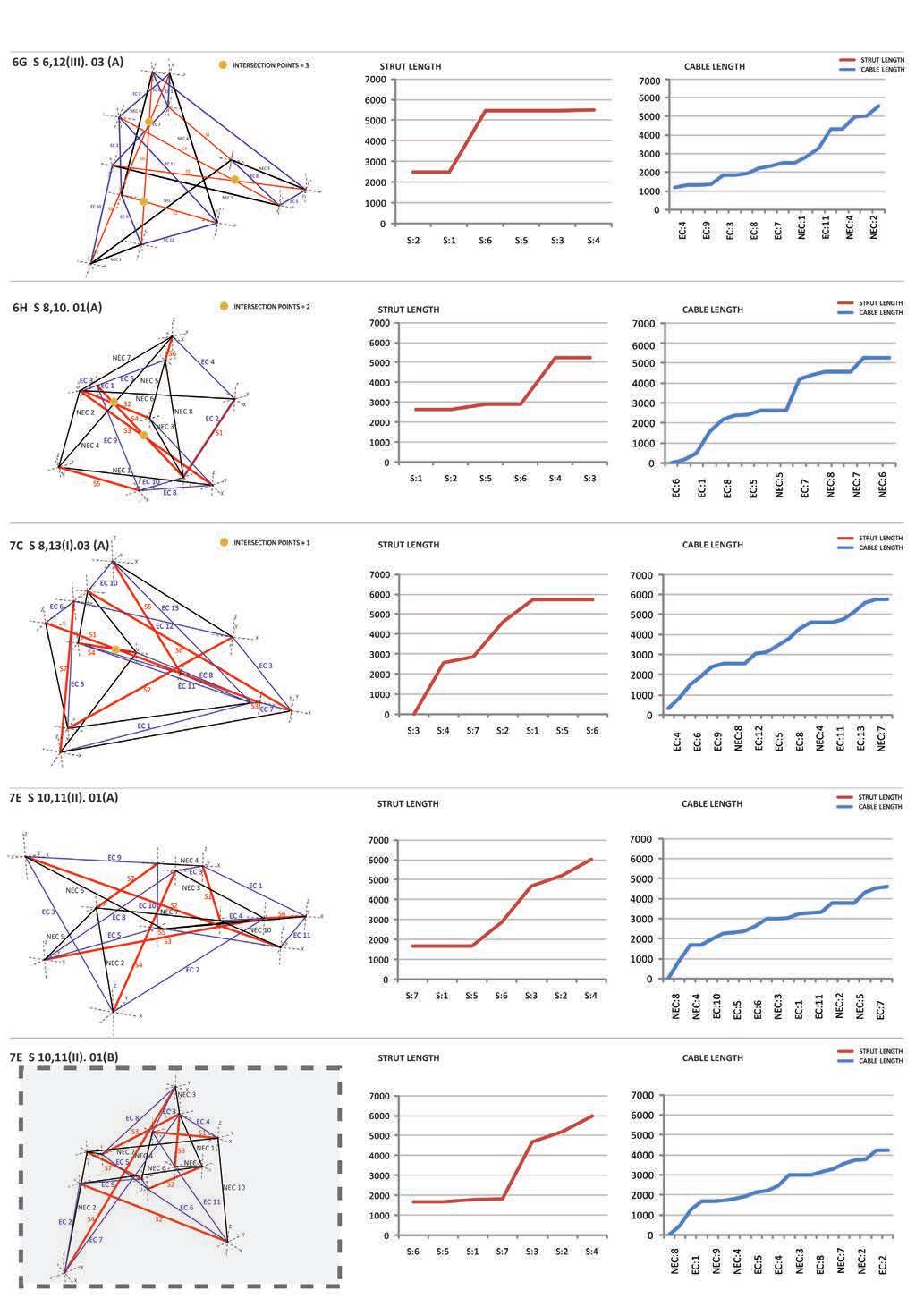
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 136 Appendix C
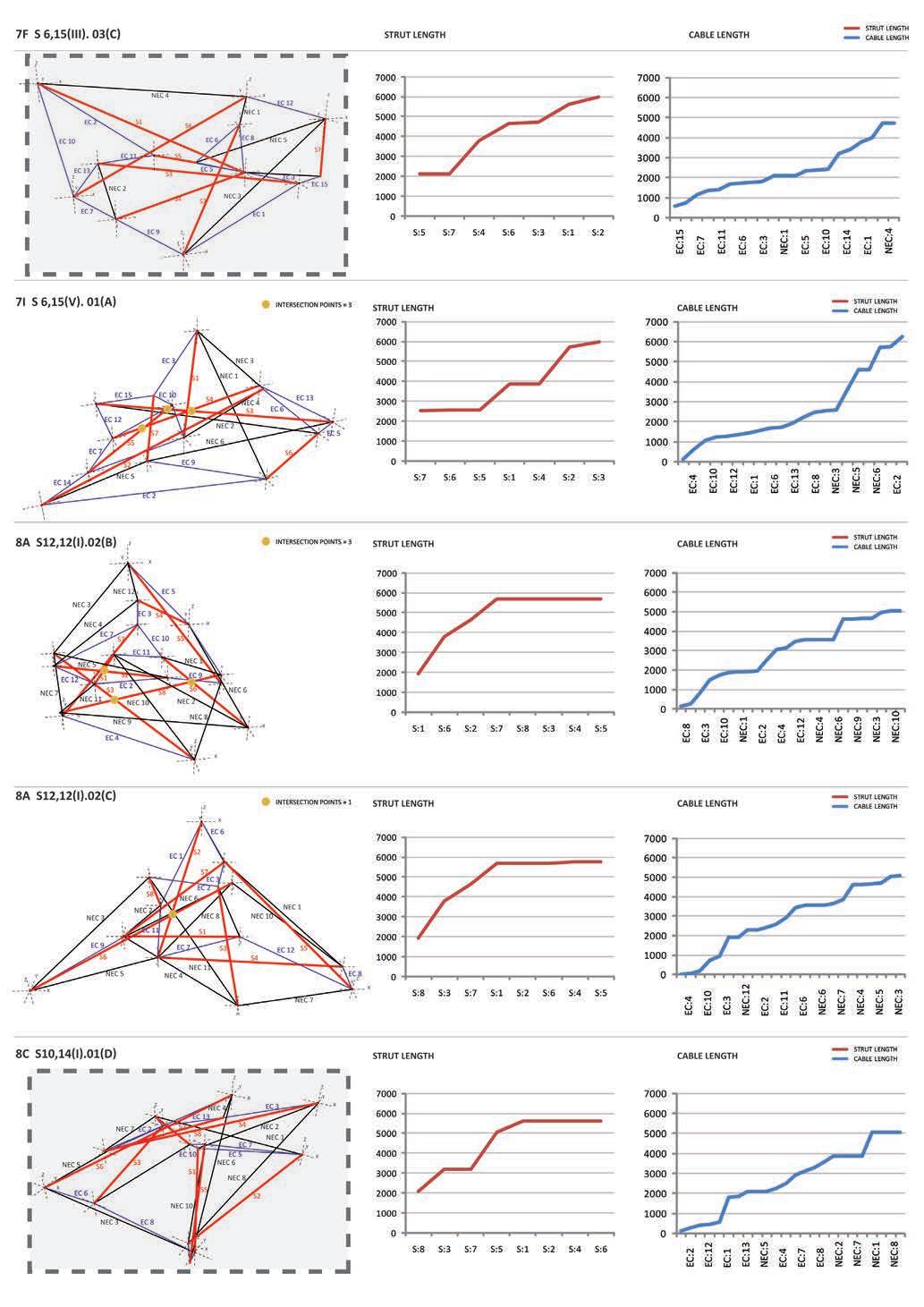
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 137 Appendix C
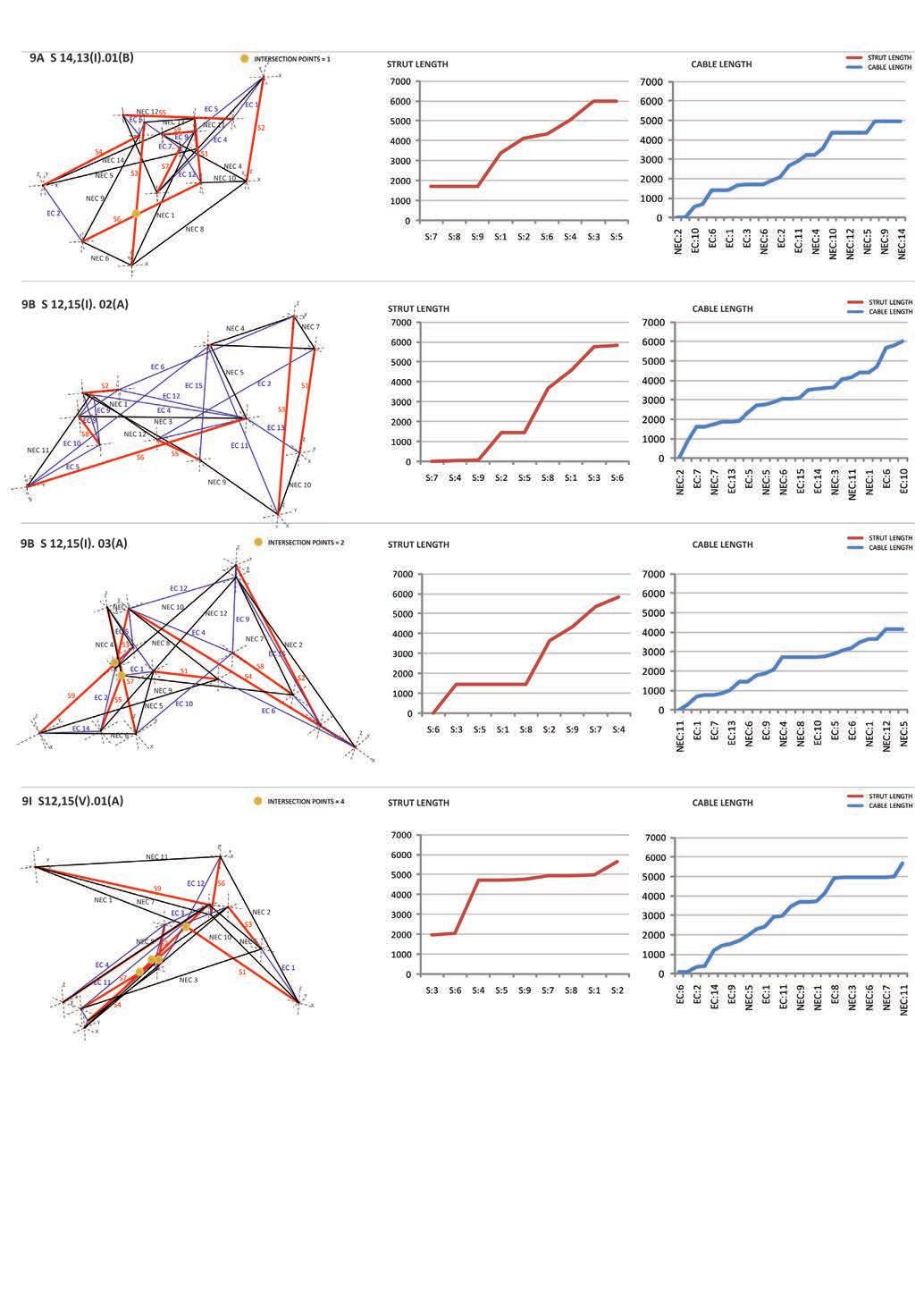
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 138 Appendix C
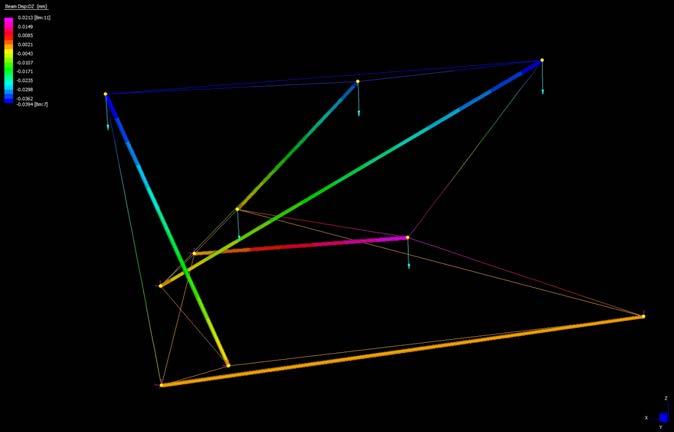
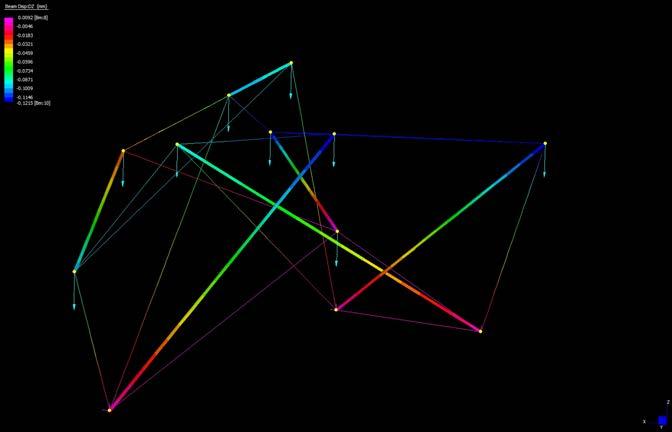
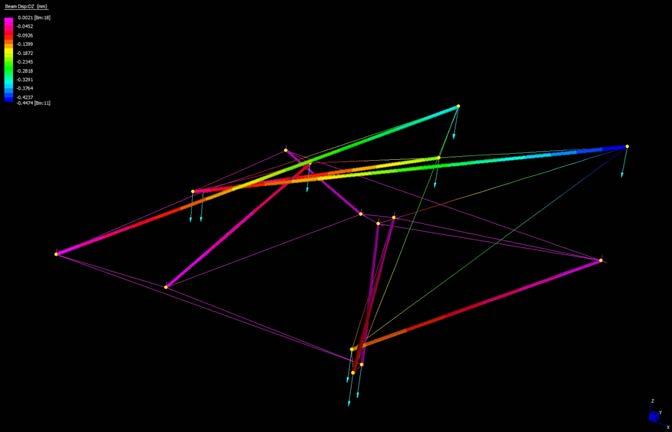
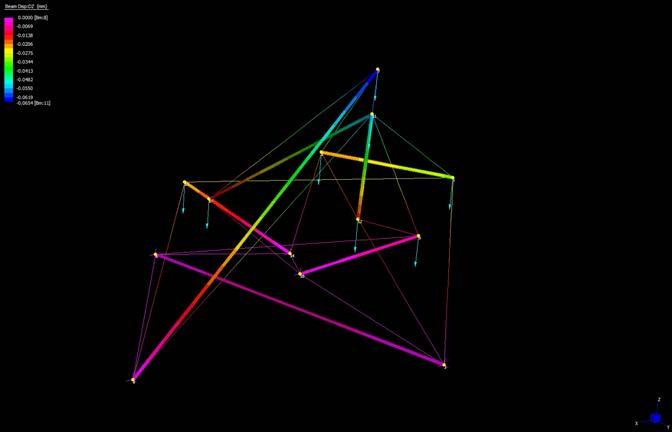
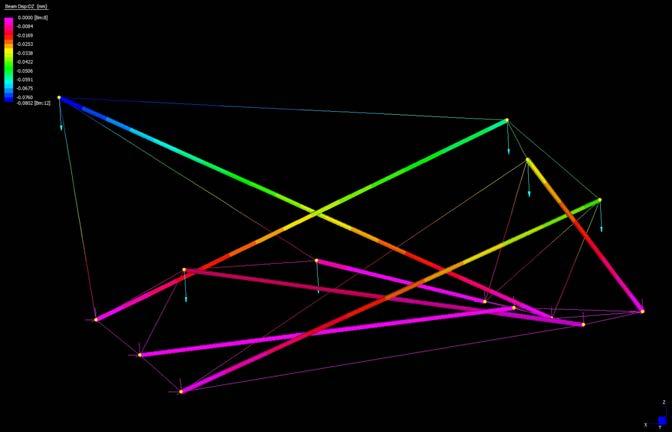
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 139 Appendix C
Strand analysis: LSA
Mathematical theory of relaxation
The basic relaxation process, as applied to pin-joined structures, comprises two steps applied iteratively. The first step computes the total net force Ri on each joint; this is the residual force, since these forces should be zero if the structure is in perfect equilibrium.
The second step adjusts the position vector xi of each joint so as to reduce the residual force acting upon it. These two steps are repeated until the maximum residual force goes below a desired threshold. The residual force vector Ri acting on joint i is computed by summing all the forces produced by links connected to it
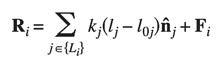
where {Li} is the set of all links meeting at joint i, lj is the current length of link j, lj= |xj2−xi| and j2 is the index of the other joint to which link j is connected, l0j is the given nominal length of link j, xi is a vector of the coordinate of joint i, kj is the stiffness of link j, (e.g., for a beam kj=EjAj / lj where E is the modulus and A is the cross section area), nˆ j is the unit vector in the direction of the link nˆ j=(xj2−xi)/|xj2−xi|, and Fi is any external force vector acting on joint i (e.g. gravity).
The effective stiffness vector Si of each joint i is estimated by summing all the stiffness of all links connected to it
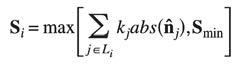
where abs(nj) is a unit vector composed of the absolute value of each term in the unit vector in the direction of the link, abs(n^j) =(|nˆ x| ,| nˆ y| ,| nˆ z|). Note that to handle singularities, Si must be ensured to be nonzero by not allowing it to go below Smin Given the residual force acting on each joint and its effective stiffness, the displacement vector i of joint i is computed as the ratio
where alpha is a relaxation factor typically in the range 0<alpha<1 but occasionally larger (over-relaxation). The displacement can be capped by some value max. The joint positions (of ungrounded nodes only) are then updated by
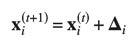
Equations (1)–(4) are repeated until the overall largest residual force max(Ri) goes below a desired threshold. Grounded nodes are omitted from this maximum.
In practice, the relaxation factor is often gradually reduced from a large number initially e.g., (0.5) to a small number e.g., (0.01) as the residuals diminish. This relaxation schedule may need to be adjusted dynamically for some structures.
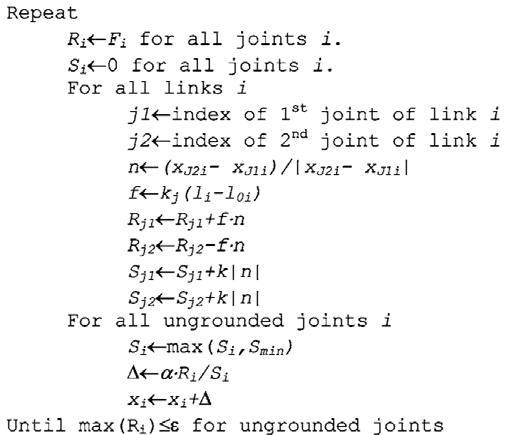
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 140
Appendix C
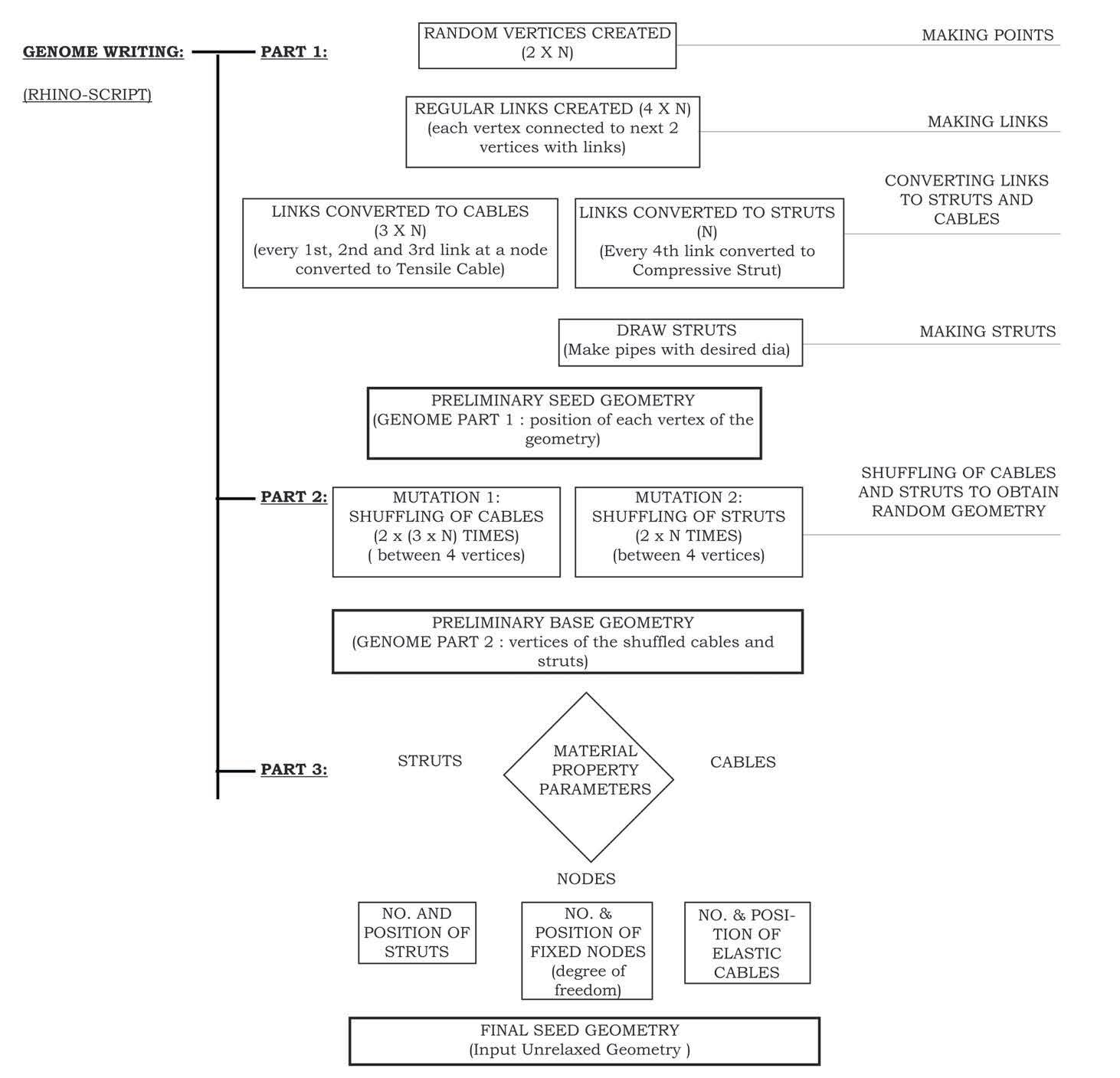
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 141
I Appendix C
Pseudocode
: stage
Pseudocode : stage II
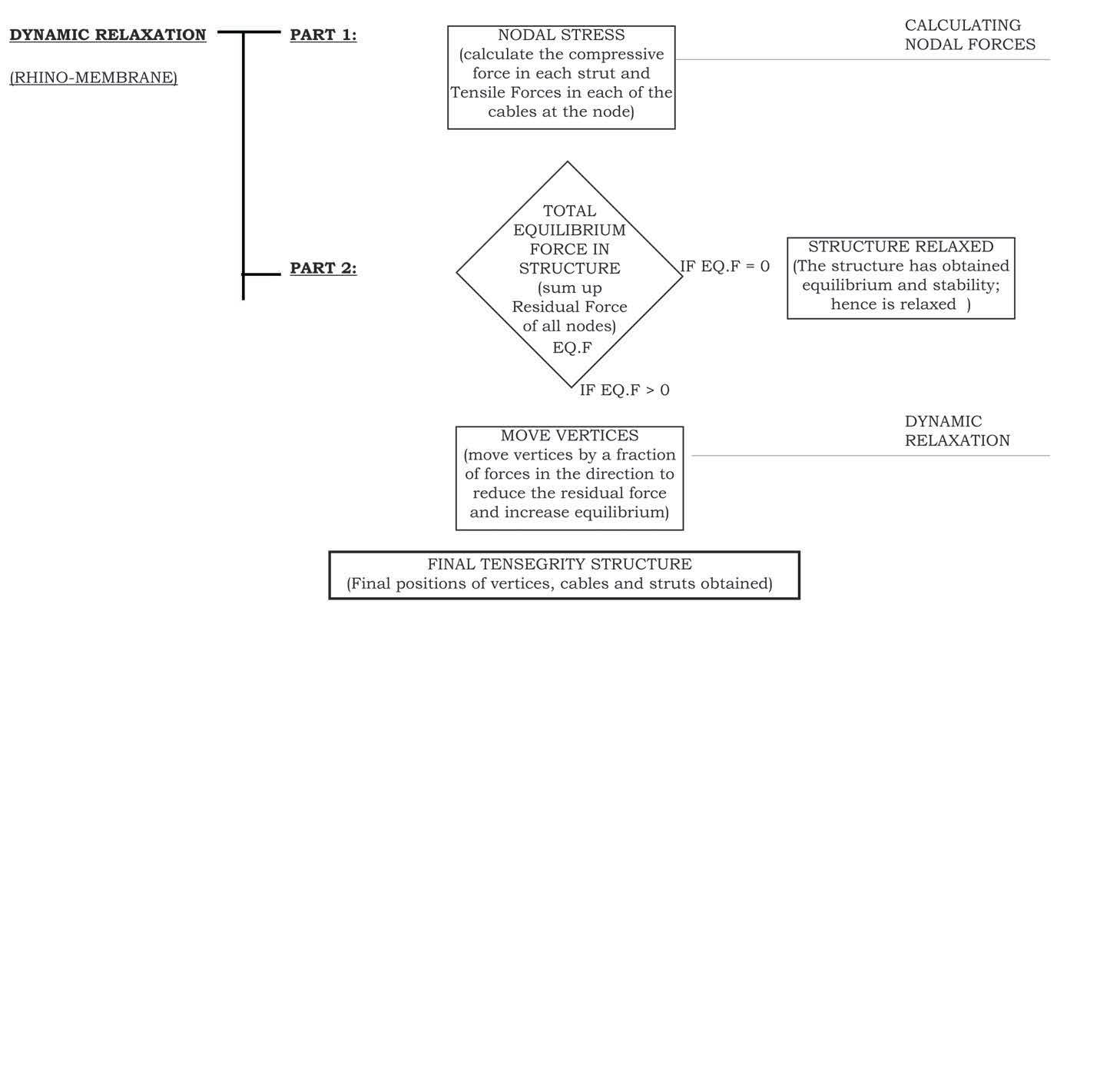
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 142
Appendix
C
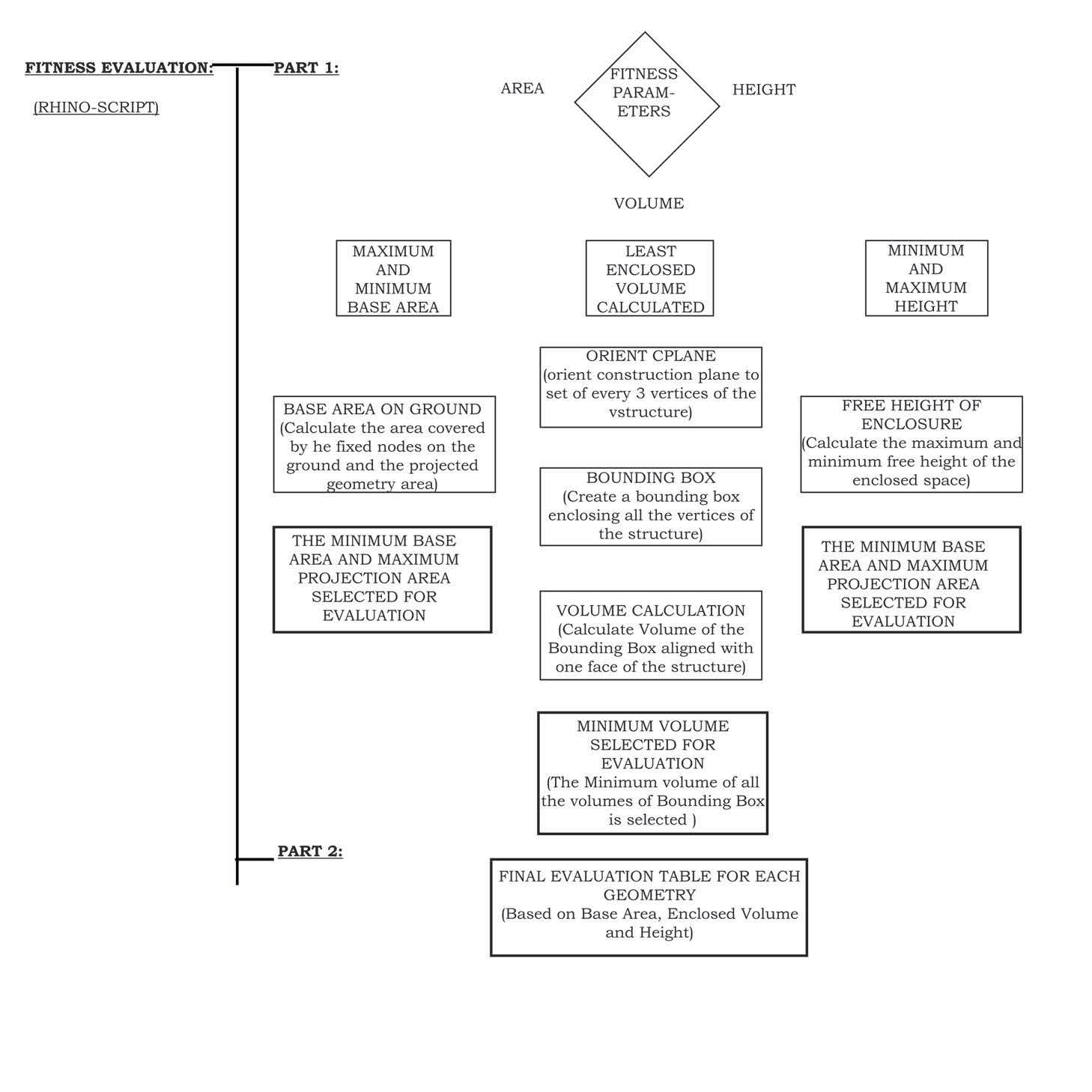
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 143
stage III Appendix C
Pseudocode :
Appendix C
Generative algorithm script: Generating basic seed
Option Explicit
'Script written by <Riddhi Oswal>
'Script copyrighted by <Riddhi Oswal>
'Script version Monday, June 28, 2010 6:03:10 PM
Call Main()
Sub Main()
'G E N O M E W R I T I N G
'MAKING POINTS:_______________________________________
Dim n 'n = number of struts n = rhino.GetInteger ("enter number of struts")
Dim arrVertices:arrVertices = GeneratePoints(n)
' MAKING LINKS:_______________________________________
Call rhino.AddLayer("Links",RGB(255, 0, 0))
Dim links(), line1, line2,arrLinks
Dim j
Dim x:x=ubound(arrVertices)
ReDim arrLinks(x,x)' this is to check overlap of links later
Call rhino.CurrentLayer ("Links")
For j = 0 To ((2*n)-1)
If j < ((2*n)-2) Then line1 = rhino.AddLine(arrVertices (j),arrVertices (j+1)) arrLinks((j),(j+1)) = line1
line2 = rhino.AddLine(arrVertices (j),arrVertices (j+2))
arrLinks((j),(j+2)) = line2
ElseIf j = ((2*n)-2) Then line1 = rhino.AddLine(arrVertices (j),arrVertices (j+1)) arrLinks((j),(j+1)) = line1
line2 = rhino.AddLine(arrVertices (j),arrVertices (0)) arrLinks((j),(0)) = line2
ElseIf j = ((2*n)-1) Then line1 = rhino.AddLine(arrVertices (j),arrVertices (0)) arrLinks((j),(0)) = line1
line2 = rhino.AddLine(arrVertices (j),arrVertices (1)) arrLinks((j),(1)) = line2
End If
ReDim Preserve links(2*j) links(2*j) = line1
ReDim Preserve links((2*j)+1) links((2*j)+1)= line2
Next
'MAKING STRUTS ARRAY:________________________________________
Dim struts ()
ReDim struts (n-1)
Dim m, PipeRad
Piperad = 1.5
For m = 0 To (n-1) struts (m)= links (4*m)
Next
'MAKING CABLES ARRAY:______________________________________
Dim cables (), p
ReDim cables ((3*n)-1)
For p = 0 To (n-1) cables (3*p)= links ((4*p)+1) cables ((3*p)+1)= links ((4*p)+2) cables ((3*p)+2)= links ((4*p)+3)
Next 'SHUFFLING STRUTS: MUTATION1______________________________
Dim Sx, Sy, l
Dim arrMutation1 ()'number of times struts are shuffled
ReDim arrMutation1((2*n)-1)
Dim Sx1,Sx2,Sy1,Sy2
For l = 0 To ((2*n)-1) Do
Sx = rhino.Floor((rnd()*(n-1)))
Sy = rhino.Floor((rnd()*(n-1)))
'Sx, Sy are the random pair of struts to be shuffled 'to prevent overlap
Sx1 = rhino.CurveStartPoint(Struts(Sx))
Sx2 = rhino.CurveEndPoint(Struts(Sx))
Sy1 = rhino.CurveStartPoint(Struts(Sy))
Sy2 = rhino.CurveEndPoint(Struts(Sy))
Dim CheckSx1,y1 Do
For y1 = 0 To x
Checksx1 = rhino.PointCompare(arrVertices(y1),Sx1) If (CheckSx1) Then Exit Do Next
Loop
Dim CheckSx2,y2 Do
For y2 = 0 To x
CheckSx2 = rhino.PointCompare(arrVertices(y2),Sx2) If (CheckSx2) Then Exit Do Next
Loop
Dim CheckSy1,y3 Do
For y3 = 0 To x
CheckSy1 = rhino.PointCompare(arrVertices(y3),Sy1) If (CheckSy1) Then Exit Do Next
Loop
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 144
: - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Dim CheckSy2,y4
Do For y4 = 0 To x CheckSy2 = rhino.PointCompare(arrVertices(y4),Sy2)
If (CheckSy2) Then Exit Do Next Loop
Dim checkline1,checkline2
checkline1 = (rhino.IsLine(CStr (arrLinks((y1),(y4)))))
If isNull(checkline1) Then checkline1 = False checkline2 = (rhino.IsLine(CStr (arrLinks((y3),(y2)))))
If isNull(checkline2) Then checkline2 = False
If Sx <> Sy And (Not(checkline1))And (Not(checkline2)) Then Exit Do Loop
Call rhino.DeleteObjects(array(struts(Sx),Struts(Sy))) arrLinks(y1,y2)= Empty arrLinks(y3,y4)= Empty
Struts(Sx)= rhino.AddLine(Sx1,Sy2) Struts(Sy)= rhino.AddLine(Sy1,Sx2)
arrLinks((y1),(y4))= Struts(Sx) arrLinks((y3),(y2))= Struts(Sy)
' to store the changing strut names and the end points that are interchanged arrMutation1(l) = array(Sx,Sy,Sx2,Sy2)
Next
'CONSTRUCTION OF ALL STRUTS:______________________________
Call rhino.AddLayer("Struts",RGB(0,255, 233))
Call rhino.CurrentLayer ("Struts")
Call StrutAll (struts,n,PipeRad)
Call rhino.CurrentLayer ("Links")
'SHUFFLING CABLES: MUTATION2______________________________
Dim arrMutation2 ()'Number of times Cables are shuffled
Dim NoIteration
'as Number of Iteration = twice number of cables
'Number of cables = 3*n
'NoIteration = (2*(3*n))
NoIteration = (3*((2*n)-1))
ReDim arrMutation2((NoIteration)-1)
Dim q
For q = 0 To ((NoIteration)-1)
'redim cables()
'cables() = ShuffleCables(arrVertices,Cables,arrLinks,n,x)
'Call ShuffleCables(arrVertices,Cables,arrLinks,n,x)
Dim Cx,Cy
Dim Cx1,Cx2,Cy1,Cy2
Do
'this Do Loop checks that once shuffled, the lines dont end up as points
Cx = rhino.Floor((rnd()*((3*n)-1)))
Cy = rhino.Floor((rnd()*((3*n)-1)))
'Cx, Cy are the random pair of cables to be shuffled ' make the above thing a functional loop later
Cx1 = rhino.CurveStartPoint(cables(Cx))
Cx2 = rhino.CurveEndPoint(cables(Cx))
Cy1 = rhino.CurveStartPoint(cables(Cy))
Cy2 = rhino.CurveEndPoint(cables(Cy))
Dim PtCompare1, PtCompare2, PtCompare3, PtCompare4 PtCompare1 = rhino.PointCompare (Cx1,Cy2) PtCompare2 = rhino.PointCompare (Cx2,Cy1) PtCompare3 = rhino.PointCompare (Cx1,Cy1) PtCompare4 = rhino.PointCompare (Cx2,Cy2)
Dim CheckCx1,z1
Do
For z1 = 0 To x
CheckCx1 = rhino.PointCompare(arrVertices(z1),cx1) If (CheckCx1) Then Exit Do Next
Loop
Dim CheckCx2,z2
Do For z2 = 0 To x
CheckCx2 = rhino.PointCompare(arrVertices(z2),Cx2) If (CheckCx2) Then Exit Do Next
Loop
Dim CheckCy1,z3
Do For z3 = 0 To x
CheckCy1 = rhino.PointCompare(arrVertices(z3),Cy1) If (CheckCy1) Then Exit Do Next
Loop
Dim CheckCy2,z4
Do For z4 = 0 To x
CheckCy2 = rhino.PointCompare(arrVertices(z4),Cy2) If (CheckCy2) Then Exit Do Next
Loop
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 145
Appendix C
Dim checkline3, checkline4,checkline5,checkline6
checkline3 = (rhino.IsLine(CStr (arrLinks((z1),(z4)))))
If isNull(checkline3) Then checkline3 = False
checkline4 = (rhino.IsLine(CStr (arrLinks((z3),(z2)))))
If isNull(checkline4) Then checkline4 = False
checkline5 = (rhino.IsLine(CStr (arrLinks((z4),(z1)))))
If isNull(checkline5) Then checkline5 = False
checkline6 = (rhino.IsLine(CStr (arrLinks((z2),(z3)))))
If isNull(checkline6) Then checkline6 = False
If Cx <> Cy And (Not (PtCompare1)) And (Not (PtCompare2)) And (Not (PtCompare3)) And (Not (PtCompare4)) And (Not(checkline3))And (Not(checkline4)) And (Not(checkline5))And (Not(checkline6)) Then Exit Do Loop
Call rhino.DeleteObjects(array(Cables(Cx),Cables(Cy))) arrLinks(z1,z2)= Empty arrLinks(z3,z4)= Empty
Cables(Cx)= rhino.AddLine(Cx1,Cy2) Cables(Cy)= rhino.AddLine(Cy1,Cx2) arrLinks((z1),(z4))= Cables(Cx) arrLinks((z3),(z2)) = Cables(Cy)
'ShuffleCables = Cables arrMutation2(q) = array(Cx,Cy,Cx2,Cy2) Next
' to store the changing strut names and the end points that are interchanged
'final Genome:
Dim Genome
Genome = array(arrVertices,arrMutation1,arrMutation2)
End Sub
'FUNCTION FOR GENERATING POINTS:__________________________
Function GeneratePoints(ByVal n)
Dim arrVerticesPts ()
ReDim arrVerticesPts (2*(n)-1)
Dim RoughPt1, RoughPt2, centrePt, Scale
Scale = 150
RoughPt1 = rhino.VectorScale((array (rnd(),rnd(),rnd())),Scale)
'RoughPt2 = rhino.VectorScale((array (rnd(),rnd(),rnd())),Scale)
RoughPt1 = rhino.VectorUnitize(RoughPt1)
RoughPt2 = rhino.VectorReverse(RoughPt1)
RoughPt1 = rhino.VectorScale (RoughPt1,scale)
RoughPt2 = rhino.VectorScale (RoughPt2,scale)
'centrePt = (rhino.VectorDivide(rhino.VectorSubtract(RoughPt1,Rough Pt2),2))
centrePt = array(0,0,0)
Dim k, RotAngle, RotAxis
RotAngle = (360/n)
'RotAxis = Rhino.VectorCreate (RoughPt1,RoughPt2)
RotAxis = array(0,0,4)
Call rhino.AddLayer("Original Vertices",RGB(234, 145, 212))
Call rhino.CurrentLayer ("Original Vertices")
For k = 0 To n-1
arrVerticesPts (k) = (rhino.PointCoordinates(Rhino.RotateObject(rhino. addpoint (RoughPt1),centrePt,(k*RotAngle),RotAxis,True)))
arrVerticesPts (k+n) = (rhino.PointCoordinates(Rhino.RotateObject (rhino. AddPoint (RoughPt2),centrePt,(k*RotAngle),RotAxis,True)))
Call rhino.addtextdot (CStr(k+1),arrverticesPts(k))
Call rhino.addtextdot (CStr(k+n+1),arrverticesPts(k+n))
Next
GeneratePoints = arrVerticesPts
End Function
FUNCTION FOR ALL STRUTS PIPING:_________________________________
Function StrutAll (ByVal struts(), ByVal n, ByVal PipeRad)
Call rhino.CurrentLayer ("Struts")
Dim i, Pipes()
For i = 0 To n-1
Call StrutOne (struts(i), PipeRad)
Next
End Function
' FUNCTION FOR ONE STRUT PIPE:___________________________________
Function StrutOne (ByVal curve, ByVal Rad)
Call rhino.CurrentLayer ("Struts")
Dim strCmd, finalstrut
strCmd = "! _-Pipe _SelID " & curve & " " & Rad & " _Cap=_Flat _Enter _Enter"
Call Rhino.Command(strCmd, 0)
End Function
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 146
Appendix C
Option Explicit
'Script written by <Riddhi Oswal>
'Script copyrighted by <Riddhi Oswal>
'Script version 03 July 2010
Call Main()
Sub Main()
'Selecting the cables and struts based on the initial geometry__________________________________
Dim tensile,t
Dim struts,s
Dim strutpipe
Dim j,k
struts = rhino.Getobjects ("select compressive members",4) tensile = rhino.GetObjects("select tensile members",4) strutpipe = rhino.getobjects (" select strutpipes",16) t = ubound(tensile)'number of tensile memners s = ubound (struts)'number of struts
Call rhino.addlayer ("basic seed",RGB(128,0,128))
Call rhino.objectlayer (struts,"basic seed")
Call rhino.objectlayer (tensile, "basic seed")
Call rhino.ObjectLayer(strutpipe, "basic seed")
'vertices of all the links_________________________________
Dim arrverticestensile(),arrverstarttensile,arrverendtensile
Dim arrverticesstrut(),arrverstartstrut,arrverendstrut
Dim arrverstarttensiles(),arrverendtensiles()
'strut vertices for all references___________________
For k = 0 To s
arrverstartstrut= rhino.Curvestartpoint (struts(k)) arrverendstrut = rhino.CurveEndPoint (struts(k))
ReDim Preserve arrverticesstrut(2*k) arrverticesstrut(2*k) = arrverstartstrut
ReDim Preserve arrverticesstrut ((2*k)+1) arrverticesstrut ((2*k)+1) = arrverendstrut
Next
'tensile vertices____________________________________
For j = 0 To t
arrverstarttensile= rhino.Curvestartpoint (tensile(j)) arrverendtensile = rhino.CurveEndPoint (tensile(j))
ReDim Preserve arrverticestensile(2*j) arrverticestensile(2*j) = arrverstarttensile
ReDim Preserve arrverticestensile ((2*j)+1) arrverticestensile ((2*j)+1) = arrverendtensile
ReDim Preserve arrverstarttensiles(j) arrverstarttensiles(j) = arrverstarttensile
Generative algorithm script: Dynamic relaxation
ReDim Preserve arrverendtensiles(j) arrverendtensiles(j) = arrverendtensile
Next ' comparing the vertices to get the other connecting nodes_________
Dim strutnode()
Dim pointcompare1(),pointcompare2(),tensilenode(),tensilelink()
ReDim strutnode ((s)*2 + 1)
ReDim pointcompare1(t)
ReDim pointcompare2(t)
ReDim tensilelink((t)*2 + 1)
Dim kt1 : kt1 = 0.5
Dim ks1 : ks1 = -0.3
Dim l : l = 1
Dim vectstrut1(), Vectstrut(),unitvectstrut(),lenvectstrut(),ks()
ReDim vectstrut1 ((s)*2 + 1)
ReDim vectstrut((s)*2 + 1)
ReDim unitvectstrut((s)*2 + 1)
ReDim lenvectstrut((s)*2 + 1)
ReDim ks ((s)*2 + 1)
Dim vect,unitvect,lengthvect,vect1,kk
Dim vecttensile1(), unitvecttensile1(), lenvecttensile1(),kt2()
Dim vecttensile(),unitvecttensile(),lenvecttensile(),kt()
Dim resultanttensile1,resultanttensile()
ReDim kt((s)*2 + 1)
ReDim unitvecttensile((s)*2 + 1)
ReDim lenvecttensile ((s)*2 + 1)
ReDim resultanttensile ((s)*2 + 1)
Dim resultantvector(),absvect()
ReDim resultantvector ((s)*2 + 1)
Dim absvectstrut(),absvecttensile() 'absolute unit vector
Dim stiffstrut(),stiff(2),stifften,stifftensile()
Dim Smin : Smin = array(0.1,0.1,0.1) 'minimum effective stiffness
ReDim absvectstrut((s)*2 + 1)
ReDim absvecttensile ((s)*2 + 1)
ReDim absvect(2)
ReDim stiffstrut((s)*2 + 1)
ReDim stifftensile((s)*2 + 1)
Dim effectivestiff()
ReDim effectivestiff ((s)*2 + 1)
Dim alpha: alpha = 0.005 ' alpha is the relaxation factor
Dim dispvect(),newnode()
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 147
Appendix C
Dim pt1,pt2,newlinktensile(),newlinkstrut()
ReDim dispvect ((s)*2 + 1)
ReDim newnode((s)*2 + 1)
ReDim newlinktensile (t)
ReDim newlinkstrut (s)
'do loop_______________________________________________
Do
'to find the connecting strutnode__________________
Dim m,n,q
For m = 0 To s
strutnode(2*m) = arrverticesstrut((2*m)+1)
strutnode((2*m)+1) = arrverticesstrut(2*m)
Next
'to find connecting tensilenode________________________
For n = 0 To ((s)*2 + 1)
For q = 0 To t pointcompare1(q) = rhino.pointcompare(arrverticesstrut(n), arrverstarttensiles(q)) pointcompare2 (q)= rhino.pointcompare (arrverticesstrut(n),arrverendtens iles(q))
If (pointcompare1(q)) Then tensilelink(2*q) = arrverendtensiles(q)
Else
End If
tensilelink(2*q)= Null
If (pointcompare2(q)) Then tensilelink((2*q)+1) = arrverstarttensiles(q) Else tensilelink((2*q)+1)= Null End If
Next
ReDim Preserve tensilenode(n) tensilenode(n) = tensilelink
Next
'to calculate the vector links and resultant force at each node__________
Dim p,r,x
For p = 0 To ((s)*2 + 1)
vectstrut1 (p)= rhino.VectorCreate (arrverticesstrut(p),strut
node(p))'strut vector
unitvectstrut(p)= rhino.vectorunitize (vectstrut1(p))'unit vector of the strut at the node lenvectstrut(p)= rhino.VectorLength (vectstrut1(p))'current length of the strut ks(p)= (Ks1/lenvectstrut(p))'stiffness of the struts vectstrut(p)= rhino.vectorscale (unitvectstrut(p),(ks(p)*(lenve ctstrut(p)-l)))'final strut vector
x=0
resultanttensile1 = array (0,0,0)
For r = 0 To ((t)*2 + 1) If Isarray (tensilenode(p)(r)) Then
vect= rhino.VectorCreate (arrverticesstrut(p),tensilenode(p)(r)) unitvect = rhino.vectorunitize (vect) lengthvect = rhino.VectorLength (vect) kk = (kt1/lengthvect) vect1 = rhino.VectorScale(vect,(kk*(lengthvect)))
ReDim Preserve vecttensile1(x) vecttensile1(x)= vect1
ReDim Preserve kt2(x) kt2(x)=kk
ReDim Preserve unitvecttensile1(x) unitvecttensile1(x)= unitvect
ReDim Preserve lenvecttensile1(x) lenvecttensile1(x)=lengthvect
resultanttensile1 = rhino.vectoradd (resultanttensile1,vecttensile1(x))'final tensile force
x=x+1
End If Next
ReDim Preserve vecttensile(p) vecttensile(p)=vecttensile1
ReDim Preserve unitvecttensile (p) unitvecttensile (p) = unitvecttensile1
ReDim Preserve lenvecttensile(p) lenvecttensile(p)= lenvecttensile1
ReDim Preserve kt (p) kt(p)=kt2
ReDim Preserve resultanttensile(p) resultanttensile(p)= resultanttensile1
resultantvector(p) = rhino.VectorAdd (vectstrut(p),resultanttensile(p))' resultant force at the node
Next
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 148
Appendix C
'to calculate effective stiffness____________________________
Dim y,u
For y = 0 To ((s)*2 + 1)
absvectstrut(y)= array((abs(unitvectstrut(y)(0))),(abs(unitvectstrut(y) (1))),(abs(unitvectstrut(y)(2)))) stiffstrut(y)= rhino.vectorscale (absvectstrut(y),ks(y))'strut effective stiffness
stifften = array (0,0,0)
For u = 0 To 2 absvect(u)= array((abs(unitvecttensile(y)(u)(0))),(abs(unitvecttensile(y)(u) (1))),(abs(unitvecttensile(y)(u)(2)))) stiff(u)=rhino.vectorscale (absvect(u),kt(y)(u))
stifften = rhino.vectoradd (stifften,stiff(u))
Next
ReDim Preserve absvecttensile(y) absvecttensile(y)= absvect
ReDim Preserve stifftensile(y) stifftensile(y)=stifften
effectivestiff(y)= rhino.VectorAdd(stiffstrut(y),stifftensile(y))
Next
' to calculate displacement vector and new joint position_________
Dim v,z
Dim b,a
For v = 0 To ((s)*2 + 1)
dispvect(v)= array( ((alpha)*(resultantvector(v)(0))/ (effectivestiff(v)(0))),((alpha)*(resultantvector(v)(1))/(effectivestiff(v)(1))),((alph a)*(resultantvector(v)(2))/(effectivestiff(v)(2)))) newnode(v)= rhino.vectoradd( arrverticesstrut(v),dispvect(v))
Call rhino.addpoint (newnode(v))
For z = 0 To t ' replacing tensile vertices with the new vertices
pt1 = rhino.pointcompare(arrverticesstrut(v),arrverstarttensiles(z)) pt2 = rhino.pointcompare (arrverticesstrut(v),arrverendtensiles(z))
If (pt1) Then arrverstarttensiles(z)= newnode(v)
End If
If (pt2)Then arrverendtensiles(z)= newnode(v)
End If
Next
arrverticesstrut(v)= newnode (v)'replacing strut vertices with the new vertices
Next
For b = 0 To s
newlinkstrut(b)= rhino.addline (arrverticesstrut(2*b),arrverticesstrut((2 *b)+1)) 'creating new strut link
Next
For a = 0 To t
newlinktensile(a)= rhino.addline(arrverstarttensiles(a),arrverendtensiles(a)) 'creating new tensile link
Next
Call rhino.purgelayer ("basic seed")
'repeat this till the resultant force is less then the threshold-------
'do loop_______________________
Loop
End Sub
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 149
Appendix C
References
BIBLIOGRAPHY
ILLUSTRATION CREDITS
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 151
References
STRUCTURAL RESEARCH
THE MORPHOLOGY OF STRUCTURES
- By vinzenz f.j. Sedlak
Associate professor and director, lightweight structures research unit, School of architecture, the university of new south wales, sydney australia
TENSEGRITY’S SIMILARITY TO OTHER MOVEMENT SYSTEMS
- By ewald berkers
ADJUSTABLE TENSEGRITY STRUCTURES
- By Etienne Fest; Kristina Shea; Bernd Domer; And Ian F. C. Smith, M.Asce
A LITERATURE REVIEW OF TENSEGRITY
- By Brigitte servatius
COMPARING TWO DESIGN STRATEGIES FOR TENSEGRITY STRUCTURES
- By L. Rhode-barbarigos, e. Schmidt, n. Bel hadj ali and i.f.c. Smith
DRAFT: ANALYSIS OF SKEW TENSEGRITY PRISMS
- By Mark schenk
DEPLOYABLE ANTENNA KINEMATICS USING TENSEGRITY STRUCTURE DESIGN
- By Byron franklin knight, University of florida, 2000
A PRIMER ON THE MECHANICS OF TENSEGRITY STRUCTURES
- By W. O. Williams
DEPLOYABLE TENSEGRITY STRUCTURES FOR SPACE APPLICATIONS
- By Gunnar tibert
Royal institute of technology, Department of mechanics
LIGHTNESS AND DELICACY BY CHRIS WILKINSON
- By Wilkinson eyre architects
GAIT PRODUCTION IN A TENSEGRITY BASED ROBOT
- By Chandana paul, john william roberts, hod lipson, francisco valero cuevas, Mechanical and aerospace engineering, Cornell university
DEPLOYABLE TENSEGRITY MASTS
- By A.g. Tibert, Royal institute of technology, Stockholm, sweden And S. Pellegrino, University of cambridge, Cambridge, u.k.
CLOSED-FORM EQUILIBRIUM ANALYSIS OF A PLANAR TENSEGRITY STRUCTURE
- By Jahan bayat, University of florida, Department of mechanical and aerospace engineering
- By Carl d. Crane, University of florida, Department of mechanical and aerospace engineering
STATIC ANALYSIS OF PRESTRESSED TENSEGRITY STRUCTURES
- By Carl d. Crane, University of florida, Department of mechanical and Aeronautical engineering
- By Joseph duffy, University of florida, Department of mechanical and Aeronautical engineering
- By Julio c. Correa, Universidad pontificia bolivariana, De-
partment of mechanical Engineering
LOCOMOTION OF A TENSEGRITY ROBOT VIA DYNAMICALLY COUPLED MODULES
- By John rieffel, ryan james stuk, francisco j. Valero-cuevas and hod lipson, computational synthesis laboratory, cornell university, ithaca ny
MORPHOLOGICAL COMMUNICATION: EXPLOITING COUPLED DYNAMICS IN A COMPLEX MECHANICAL STRUCTURE TO ACHIEVE LOCOMOTION
- By John a. Rieffel, francisco j. Valero-cuevas and hod lipson j. R. Soc. Interface 2010 7, 613-621 first published online 23 september 2009
SYMMETRIC PRISMATIC TENSEGRITY STRUCTURES: PART I. CON¯GURATION AND STABILITY
- BY J.y. Zhang a s.d. Guest b;¤ m. Ohsaki a dept. Of architecture & architectural engineering, kyoto university, japan dept. Of engineering, university of cambridge, united kingdom
ONE-DIMENSIONAL SYNTHESIS OF GRAPHS AS TENSEGRITY
Frameworks
- By András recski¤ and offer shaiy
TENSEGRITY MODULES FOR PEDESTRIAN BRIDGES
- By Landolf rhode-barbarigos*, nizar bel hadj ali a, rené motro b and ian f.c. Smith a
* applied computing and mechanics laboratory, structural engineering institute, station 18, ecole polytechnique fédérale de lausanne (epfl), lausanne ch-1015, switzerland. Email: landolf-giosef.rhode-barbarigos@epfl.ch
A applied computing and mechanics laboratory, structural engineering institute, station 18, ecole polytechnique fédérale de lausanne (epfl), lausanne ch-1015, switzerland. B laboratoire de mécanique et génie civil (lmgc), université de montpellier ii, montpellier cedex, france.
SYMMETRIC PRISMATIC TENSEGRITY STRUCTURES
- By J.y zhang1;2, s.d. Guest1, m. Ohsaki2
1dept. Of engineering, university of cambridge, trumpington street, cambridge cb2 1pz, united Kingdom
2dept. Of architecture and architectural engineering, kyoto university, kyoto-daigaku katsura, Nishikyo, kyoto 615-8540, japan
A SEMIDEFINITE PROGRAMMING APPROACH TO TENSEGRITY THEORY AND REALIZABILITY OF GRAPHS
-By Anthony man{cho so¤, yinyu y
STRUCTURAL MORPHOLOGY OF TENSEGRITY SYSTEMS
- By R. Motro
Asian journal of civil engineering (building and housing) vol. 10, no. 1 (2009) pages 1-19
Laboratory of mechanics and civil engineering, umrcnrs 5508, université montpellier ii, Cc048, 34095 montpellier cedex 5, france
TENSEGRITIES AND ROTATING RINGS OF TETRAHEDRA: A SYMMETRY VIEWPOINT OF STRUCTURAL MECHANICS
- By S. D. Guest phil. Trans. R. Soc. Lond. A 2000 358, 229243 Tensegrities and rigity
Matthew thomas
March 12, 2008
TENSEGRITY FRAMEWORKS: STATIC ANALYSIS REVIEW.
- By Sergi hern`andez juan 1
Institut de rob`otica i inform`atica industrial (iri), csic-upc, barcelona, spain
- By Josep m. Mirats tur 2
Institut de rob`otica i inform`atica industrial (iri), csic-upc, barcelona, spain
SHAPE CONTROL OF A MULTI-AGENT SYSTEM USING TENSEGRITY STRUCTURES
-By Benjamin nabet _,1 naomi ehrich leonard _,1 _ mechanical and aerospace engineering, princeton University, princeton, nj 08544 usa, {bnabet, Naomi}@princeton.edu
THE MAKING OF A TENSEGRITY TOWER
- By Herbert klimke, soeren stephan
Mero gmbh & co. Kg, max-mengeringhausen-strasse 5, d-97084 würzburg, germany
ADJUSTABLE TENSEGRITY STRUCTURES
-BY Etienne fest1; kristina shea2; bernd domer3; and ian f. C. Smith, m.sce4
AN INTRODUCTION TO THE MECHANICS OF TENSEGRITY STRUCTURES
- By Robert e. Skelton
University of california, san diego
- By J. William helton
University of california, san diego
- By Rajesh adhikari
University of california, san diego
- By Jean-paul pinaud
University of california, san diego
- By Waileung chan
University of california, san diego
STABILITY CONDITIONS FOR TENSEGRITY STRUCTURES
- By J.y. Zhang, m. Ohsaki *
Department of architecture and architectural engineering, kyoto university, kyoto-daigaku katsura, nishikyo, kyoto 615-8540, japan
A PRIMER ON THE MECHANICS OF TENSEGRITY STRUCTURES
- By W. O. Williams
DEPLOYABLE ANTENNA KINEMATICS
Using tensegrity structure design
- By Byron franklin knight
REVIEW OF FORM-FINDING METHODS FOR TENSEGRITY STRUCTURES
- By A.g. Tibert and s. Pellegrino
-department of structural engineering, royal institute of technology
Se-100 44 stockholm, sweden.
†department of engineering, university of cambridge Trumpington street, cambridge cb2 1pz, u.k.
ZERO STIFFNESS TENSEGRITY STRUCTURES
- By M. Schenk a, s.d. Guest b,*, j.l. Herder a
A mechanical, maritime and materials engineering, delft university of technology, mekelweg 2, 2628 cd delft, the netherlands
B department of engineering, university of cambridge, trumpington street, cambridge cb2 1pz, united kingdom Matthew Http://tensegrity.wikispaces.com/benefits+of+tensegrity
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 152
Bibliography
A RELAXATION METHOD FOR SIMULATING THE KINEMATICS OF COMPOUND NONLINEAR MECHANISMS
- By hod lipson
Sibley school of mechanical and aerospace Engineering and faculty of computing and Information, Cornell university, Ithaca, ny 14853
E-mail: hod.lipson@cornell.edu
OPTIMIZATION OF TENSEGRITY STRUCTURES
- By Milenko masic a,*, robert e. Skelton a, philip e. Gill b A department of mechanical and aerospace engineering, university of california san diego, 9500 gilman drive, la jolla, ca 92093-0411, united states
B department of mathematics, university of california san diego, la jolla, ca 92093-0112, united states
TENSEGRITY STRUCTURES AND THEIR APPLICATION TO ARCHITECTURE CHAPTER 4. DEFINITIONS AND BASIC PRINCIPLES
EQUILIBRIUM CONDITIONS OF A TENSEGRITY STRUCTURE
Proceedings of the third world conference on structural control (3wcsc)
Como, italy, april 7-12, 2002
Darrell williamson, robert e. Skelton, and jeongheon han
DYNAMIC BEHAVIOR AND VIBRATION CONTROL OF A TENSEGRITY STRUCTURE
N. Bel hadj ali* and i.f.c. Smith Applied computing and mechanics laboratory Ecole polytechnique fédérale de lausanne (epfl) Enac/is/imac, station 18, 1015 lausanne, switzerland Http://www.rwgrayprojects.com/synergetics/s07/p0000. html
CRAWLING BY BODY DEFORMATION OF TENSEGRITY STRUCTURE ROBOTS
Mizuho shibata, fumio saijyo, and shinichi hirai
KINEMATIC ANALYSIS OF TENSEGRITY STRUCTURES
By William brooks whittier
STUDY ON TENSEGRITY ELEMENT FORM FINDING PROCESS
Xiaoguang Chen, Yaozhi Luo*
*Space Structure Research Center, Dept. Of Civil Engineering, Zhejiang University, Hangzhou, 310027, China.
Dept. Of Civil Engineering, University of Waterloo, Waterloo, Ontario, N2L 3G1, Canada. X28chen@engmail.uwaterloo.ca luoyz@zju.edu.cn
STRUCTURAL PATTERNS IN NATURE – PART I
T. Wester
Royal Danish Academy of Fine Arts, School of Architecture, Copenhagen, Denmark Ture.wester@karch.dk
TENSEGRITY SYSTEMS. THE CASE OF POSITIVE DOUBLE CURVATURE FOR DOUBLE LAYER SYSTEMS. A. Reséndiz, B. Maurin, R. Motro, N. Pauli, V. Raducanu. Laboratoire de Mécanique et Génie-Civil - UMR5508, Université de Montpellier II, cc048, Place E. Bataillon, 34096 Montpellier, France. Ecole d’Architecture Languedoc-Roussillon. 179, rue de l’Espérou, 34093 Montpellier cedex 5, France.
Resendiz@lmgc.univ-montp2.fr, maurin@lmgc.univ-montp2. fr, motro@lmgc.univ-montp2.fr, Nicolas.pauli@montpellier.archi.fr, raducanu@free.fr
SPATIALITY IN MEMBRANE STRUCTURES
S.L.M.C. Titotto and R.M.O. Pauletti
Escola Politécnica da Universidade de São Paulo, Av. Professor Almeida Prado – Travessa 2 – Cidade Universitária – CEP: 05508-900, São Paulo, Brasil. Titotto@hotmail.com, pauletti@usp.br
TENSEGRITY GLASS STRUCTURES
M. Eekhout
Chair of Product Development, Faculty of Architecture, Delft University of Technology
Director Octatube Space Structures BV, Rotterdamseweg 200, 2628 AS Delft, The Netherlands M.eekhout@octatube.nl
TENSION-STRUT SYSTEMS COMPOSED OF CONCENTRIC HOOPS
Janusz.rebielak@pwr.wroc.pl
TENSEGRITY MODULES FOR CABLE-STRUT SYSTEMS
A. Micheletti, V. Nicotra, P. Podio-Guidugli Dipartimento di Ingegneria Civile, Università di Roma torvergata, Via del Politecnico 1, 00133 Roma, Italy.
Micheletti@ing.uniroma2.it, nicotra@uniroma2.it, ppg@ uniroma2.it
THE NEW GEOMETRICAL CONCEPTION OF TENSEGRITY EXTENDER
Z. Bieniek
Department of Engineering Geometry and Graphics, Faculty of Civil and Environmental Engineering, Rzeszów University of Technology, ul. Poznańska 2, 35-959 Rzeszów, Poland
Zbieniek@prz.rzeszow.pl
MULTI-LAYERED TENSILE MEMBRANES
IASS 2004
M. Mollaert
Department of Architecture, Vrije Universiteit Brussel, Pleinlaan 2, B-1050 Brussels, Belgium. Marijke.mollaert@vub.ac.be
TWO YEARS OF TENSEGRITY MODELLING WORKSHOPS AT THE UNIVERSITY OF SHEFFIELD, SCHOOL OF ARCHITECTURE
Mr. Konstantinos Sakantamis1, Dr. Olga Popovic Larsen2, Mrs. E. Gutierrez3
1. Research Assistant, the University of Sheffield, Department of Civil and Structural Engineering, Sir Frederick Mappin Building, Mappin Street, Sheffield, S1 3JD, UK
2. Lecturer in Architecture/Structures, the University of Sheffield, School of Architecture, the Arts Tower, Western Bank, Sheffield S10 2TN, UK
3. Phd candidate, the University of Sheffield, School of Architecture, the Arts Tower, Western Bank, Sheffield S10 2TN, UK
K.Sakantamis@sheffield.ac.uk,O.Popovic@Sheffield. ac.uk,elisa.g@sheffield.ac.uk
SURFACE FITTING APPROACH FOR TENSILE MEMBRANES DESIGN
J. Sánchez, M.A Serna
Mechanical Engineering Department- Tecnun-University of Navarra. Manuel de Lardizabal 13. 20018
San Sebastian. Spain. Jsanchez@tecnun.es, maserna@tecnun.es
P. Morer
Industrial Engineering Department II- University of La Coruña. Mendizabal s/n. 15403 Ferrol. A Coruña. Spain. Pmorer@udc.es
HIERARCHICAL MODULAR STRUCTURES AND THEIR GEOMETRICAL CONFIGURATIONS FOR FUTURE LARGE SPACE STRUCTURES
N.Kishimoto, M.C.Natori
Laboratory of Space Structures, The Institute of Space and Astronautical Science, 3-1-1 Yoshinodai, Sagamihara, Kanagawa, 229-8510, Japan. Kisimoto@taurus.eng.isas.jaxa.jp, mcnatori@isas.jaxa.jp
TEXTEGRITY: TEXTILES AND TENSEGRITY
Dr.-Ing. Lars Meeß-Olsohn Konstruktive Gestaltung, Leichtbau, Bauwesen, Universität Duisburg-Essen, Universitätsstr. 15, 45141 Essen, Germany
Lars.meess@uni-essen.de; www.uni-essen.de; www. leichtbaukunst.de
CABLE-STRUT GRIDS MADE OF PRISMS WANG binbing and LI yanyun BLK401, Choa Chu Kang Ave 3, #10-211, Singapore 680401 Email: drbbwang@hotmail.com, li_yanyun@hotmail.com
NUMERICAL MODELLING OF TENSEGRITY SYSTEM FOLDING: PROBLEM OF COLLISIONS BETWEEN SLENDER BARS
C. Le Saux, F. Cevaer, R. Motro Laboratoire de Mécanique et Génie-Civil - UMR5508, Université de Montpellier II, cc048, Place E. Bataillon, 34096 Montpellier, France. Lesaux@lmgc.univ-montp2.fr, cevaer@lmgc.univ-montp2.fr, motro@lmgc.univ-montp2.fr
VAULTED TENSEGRITY STRUCTURES: GEOMETRIC DESIGN ALGORITHMS
J. Kim, K.A. Liapi.
Civil Engineering Department, University of Texas at Austin, 1 University Station C1752 Austin, TX 78712-0276, U.S.A. Jinman@mail.utexas.edu, kliapi@mail.utexas.edu
INVESTIGATIONS INTO THE STABILITY BEHAVIOUR OF TENSEGRITY STRUCTURES
K. Abedi, B. Shekastehband Department of Civil engineering, Sahand University of Technology, Tabriz, Iran. Department of Civil engineering, Zanjan University, Zanjan, Iran.
K _abedi@sut.ac.ir, shekastehband@mail.znu.ac.ir
LARGE SPAN ROOF STRUCTURES ON A SYMMETRICAL LAYOUT, CABLE DOMES OR TENSEGRITY STRUCTURES
L. Lazarov
University “Sts. Cyril and Methodius”, Faculty of Civil Engineering, Partizanski Odredi bb, 1000 Skopje, Republic of Macedonia. Lazarov@gf.ukim.edu.mk
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 153
Bibliography
Bibliography
STATIC AND DYNAMIC ROBUST CONTROL OF TENSEGRITY SYSTEMS
J.Averseng, B. Crosnier
Laboratoire de Mécanique et Génie Civil - UMR 5508, Université Montpellier II - CC 048, Place Eugène Bataillon 34 095 Montpellier, France. Averseng@lmgc.univ-montp2.fr, crosnier@lmgc.univ-montp2. fr
A STUDY OF THE RESPONSE OF A CONTIGUOUS TENSEGRITY BEAM UNDER STATIC CYCLIC LOADING
N. Ben Kahla
Department of Mechanical Engineering, Institut Supérieur des Sciences Appliquées et de Technologie De Sousse, Cité Taffala, 4003 Sousse Ibn Khaldoun Sousse, Tunisia.
Ph : 216 73 226 432 Fax : 216 73 332 658 Nabil.benkahla@enig.rnu.tn
AN INTELLIGENT SPATIAL TENSEGRITY STRUCTURE
B. Adam, I. F. C. Smith
Applied Computing and Mechanics Laboratory (IMAC) EPFL – Swiss Federal Institute of Technology in Lausanne 1015 Lausanne, Switzerland Bernard.Adam@epfl.ch, Ian.Smith@epfl.ch
DEVELOPMENT AND REALIZATION OF A FREE–FORM TENSEGRITY STRUCTURE
V. Bayer1, K. Wagener2, C. Wolkowicz1 1Bauhaus – Universität Weimar, Geschwister Scholl Str. 8, D–99421Weimar, Germany. 2PWP Planungsbüro, Berlin, Germany. Veit.bayer@bauing.uni-weimar.de
PRELIMINARY REPORT OF OBSERVATION OF REAL SCALE TENSEGRITY
SKELETONS UNDER TEMPERATURE CHANGE
K. Kawaguchi and S. Ohya
Institute of Industrial Science, The University of Tokyo, Komaba 4-6-1, Meguro-ku, Tokyo 153-8505, Japan. Kawaken@iis.u-tokyo.ac.jp, ohya@iis.u-tokyo.ac.jp
NEW CONCEPT FOR DEPLOYABLE TENSEGRITY SYSTEMS STRUCTURAL MECHANISMS ACTIVATED BY SHEAR FORCES
Smaili A., Motro R. And Raducanu V. Laboratoire de Mécanique et Génie-Civil - UMR5508, Université de Montpellier II, cc048, Place E. Bataillon, 34096 Montpellier, France. Smaili@lmgc.univ-montp2.fr, motro@lmgc.univ-montp2.fr and vinicius.raducanu@montpellier.archi.fr
THE EXPERIMENTAL RESEARCH ON COMBINED UNIT OF FLAT-QUADRPRISM TENSEGRITY
Y.Z. Luo, Fu Gang, Chen Ting Space Structure Research Center of Zhejiang University, Hangzhou 310027, P.R.China Hangzhou Design Institute of Urban Construction, Hangzhou 310000, P.R.China
GRANULAR TENSEGRITY MODEL TO ANALYZE THE CYTOSKELETON ORGANIZATION IN ADHERENT CELLS
J. L. Milan1, S. Wendling-Mansuy1, M. Jean2, P. Chabrand1
1Laboratoire d’Aérodynamique et Biomécanique du Mouvement - UMSR2164, Université de la Méditerranée, 163 Avenue de Luminy, case 918, 13288, Marseille Cedex O9, France.
2Laboratoire de Mécanique et d’Acoustique - UPR7051, 31 Chemin Joseph Aiguier, 13402 Marseille Cedex 2, France
THE CLOUD OF YVERDON A. Paronesso, R. Passera
Passera & Pedretti Consulting Engineers Switzerland, Via al Molino 6, CH-6916 Lugano-Grancia, Switzerland.
TENSEGRITY
L. P.Yang, Z.B. Lin , R..J. Qian,. College of Civil Engineering, Tongji University, No.1239 Siping Road, Shanghai, China.
THE EFFECTS OF STATIC LOADING AND SUPPORT CONDITIONS ON THE PERFORMANCE OF DOUBLE LAYER VAULTED TENSEGRITY STRUCTURES
S.G. Liu, K.A. Liapi, J.L. Tassoulas Civil Engineering Department, University of Texas at Austin, 1 University Station C1752 Austin, TX 78712-0276, U.S.A. Richeliu@mail.utexas.edu, kliapi@mail.utexas.edu, yannis@ mail.utexas.edu
BIOMIMETIC RESEARCH
THE ARCHITECTURE OF LIFE-A UNIVERSAL SET OF BUILDING RULES SEEMS TO GUIDETHE DESIGN OF ORGANIC STRUCTURES—FROM SIMPLE CARBON COMPOUNDS TO COMPLEX CELLS AND TISSUES
- By Donald E. Ingber
pg 48 Scientific American January 1998
LIFE ON THE WIRE: ON TENSEGRITY AND FORCE BALANCE IN CELLS
- By Carlo Galli1, Stefano Guizzardi, Giovanni Passeri2, Guido Maria Macaluso1, Renato Scandroglio
HOW CELLS (MIGHT) SENSE MICROGRAVITY DONALD INGBER
- By Departments of Pathology & Surgery, Children’s Hospital and Harvard Medical School, Boston, Massachusetts 02115, USA
TENSEGRITY AND SPINE. A NEW BIOMECHANICAL MODEL
- By Jean Claude de Mauroy, Jean François Salmochi Clinique du Parc - Lyon (FRA)
TENSEGRITY: CONSTRUCTION OF RIGID DNA TRIANGLES WITH FLEXIBLE FOUR-ARM DNA JUNCTIONS
- By Dage Liu, Mingsheng Wang, Zhaoxiang Deng, Richard Walulu, and Chengde Mao*
Department of Chemistry, Purdue UniVersity, West Lafayette, Indiana 47907
WHOLE CELL MECHANICS OF CONTRACTILE FIBROBLASTS: RELATIONS BETWEEN EFFECTIVE CELLULAR AND EXTRACELLULAR MATRIX MODULI
- By J. Pablo Marquez, Elliot L. Elson and Guy M. Genin
NONLINEAR SYSTEMS BIOLOGY AND DESIGN: SURFACE DESIGN
- By Jenny E. Sabin, M.Arch., Lecturer, Dept of Architecture, University of Pennsylvania; Member, Institute for Medicine and Engineering; Senior
Researcher, Nonlinear Systems Organization; Director, CabinStudio
ANIMAL ARCHITECTURE: BUCKMINSTER FULLER’S TENSEGRITY | REALITY SANDWICH http://www.realitysandwich.com/animal_architecture_ buckminster_fuller
HOW CELLS (MIGHT) SENSE MICROGRAVITY
- By DONALD INGBER1
Departments of Pathology & Surgery, Children’s Hospital and Harvard Medical School, Boston, Massachusetts 02115, USA
CPG CONTROL OF A TENSEGRITY MORPHING STRUCTURE FOR BIOMIMETIC APPLICATIONS
- By T. K. BLISS, T. IWASAKI, and H. BART-SMITH
University of Virginia
Department of Mechanical and Aerospace Engineering 122 Engineer’s Way, Charlottesville, VA 22904
TENSEGRITY I. CELL STRUCTURE AND HIERARCHICAL SYSTEMS BIOLOGY
- By Donald E. Ingber
Departments of Surgery and Pathology, Children’s Hospital and Harvard Medical School, Enders 1007, 300 Longwood Avenue, Boston, MA 02115, USA
(e-mail: donald.ingber@tch.harvard.edu)
CONTINUOUS TENSION, DISCONTINUOUS COMPRESSION A MODEL FOR BIOMECHANICAL SUPPORT OF THE BODY
- By Stephen M. Levin M.D. http://www.intensiondesigns.com/geometry_of_anatomy. html
REVIEW PAPER: CONTINUUM BIOMECHANICS OF SOFT BIOLOGICAL TISSUES
- By J.D. Humphrey
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 154
COMPUTATIONAL RESEARCH
IMPLEMENTATION OF A COMPUTER ALGORITHM FOR AN INTERACTIVE 3D CAD GENERATION OF TENSEGRITY STRUCTURES
- By Jason E. Charalambides and Katherine A. Liapi
EVOLUTIONARY FORMFINDING OF TENSEGRITY STRUCTURES
- By Chandana Paul, Hod Lipson, Francisco Valero Cuevas Mechanical and Aerospace Engineering Cornell University Ithaca, NY 14853, USA cp228@cornell.edu
A MARCHING PROCEDURE FOR FORM-FINDING FOR TENSEGRITY STRUCTURES
- By ANDREA MICHELETTI AND WILLIAM O. WILLIAMS My Evolutionary Path From Tensegrity to Flextegrity, Flextegrity, Inc. 2006
AUTOMATED DISCOVERY AND OPTIMIZATION OF LARGE IRREGULAR TENSEGRITY STRUCTURES
- By John Rieffel *, Francisco Valero-Cuevas, Hod Lipson Department of Mechanical and Aerospace Engineering, Cornell University, 138 Upson Hall, Ithaca, NY 14853, United States
REVIEW OF FORM-FINDING METHODS FOR TENSEGRITY STRUCTURES
- By A.G. Tibert and S. Pellegrino† Department of Structural Engineering, Royal Institute of Technology
SE-100 44 Stockholm, Sweden.
†Department of Engineering, University of Cambridge Trumpington Street, Cambridge CB2 1PZ, U.K.
A SEMIDEFINITE PROGRAMMING APPROACH TO TENSEGRITY THEORY AND GRAPH REALIZATION
- By Anthony So
Department of Computer Science
- By Manar El–Chammas
Department of Electrical Engineering
- By Yinyu Ye
Department of Management Science and Engineering and by courtesy, Electrical Engineering Stanford University http://www.stanford.edu/˜yyye
TEMPORARY SHELTERS RESEARCH
A SYSTEMS VIEW OF TEMPORARY HOUSING PROJECTS IN POST-DISASTER RECONSTRUCTION
- Cassidy Johnsona; Gonzalo Lizarraldea; Colin H. Davidsona
INTEGRATED RELIEF AND RECONSTRUCTION MANAGEMENT FOLLOWING A NATURAL DISASTER
-Yaoxian Ye and Norio Okada
ANALYSIS OF THE POST-DISASTER RECONSTRUCTION PROCESS FOLLOWING TURKISH EARTHQUAKES, 1999
-Berna Baradan
IMPACTS OF PREFABRICATED TEMPORARY HOUSING AFTER DISASTERS: 1999 EARTHQUAKES IN TURKEY
-Cassidy Johnson
POST-DISASTER SUSTAINABLE HOUSING SYSTEM IN TURKEY
-Sevgül Limoncu* & Banu Çelebioğlu
URBAN EARTHQUAKE HAZARD IN DEVELOPING COUNTRIES: SQUATTER SETTLEMENTS AND THE OUTLOOK FOR TURKEY
-William I. Torry
POST-DISASTER TEMPORARY HOUSING NEEDS FOLLOWING A MAJOR DISASTER IN WASHINGTON STATE
-Matt Fink, Ilyssa Plumer, Kit Radosevich, Erin Ward, Dr. Rebekah Green
REBUILDING SHELTER AFTER NATURAL DISASTERS: THREE DECADES OF USAID EXPERIENCE IN LATIN AMERICA AND THE CARIBBEAN Prepared for United States Agency for International Development
-Barbara E. Friday
PADCO, Inc.
TRUTHS AND MYTHS ABOUT COMMUNITY PARTICIPATION IN POST-DISASTER HOUSING PROJECTS
-Colin H. Davidsona,Cassidy Johnsona, Gonzalo Lizarraldea, Nese Dikmena, Alicia Sliwinskia.
STRATEGIES FOR THE REUSE OF TEMPORARY HOUSING
-Cassidy Johnsona
RE-DESIGN, RE-USE AND RECYCLE OF TEMPORARY HOUSES
-Hakan Arslan
EMERGENCY SHELTER
-Ian Davis
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 155
Bibliography
Illustration credits
1.1
Klaus-michael koch, ‘membrane structures’, prestel, munich ,2004. 1.2 Http://sacredsites.Com/asia/india/kumbha_mela.Html
Klaus-michael koch, ‘membrane structures’, prestel, munich, 2004. Http://circus.Bendall.De/parlari.Html
1.3 Http://www.Corearchitect.Co.Uk/the-best-olympic-stadiumarchitecture
Http://www.Shaastra.Org/2009/site/events/workshops/active_ tensegrity
1.6 Http://www.Defence-industries.Com/contractors/army/ infrastructure/dorce/
Http://www.Kepu.Net.Cn/english/quake/ruins/rns20.Html
1.7 Http://www.Doubleharvest.Org/where/haiti/housing
1.8 ‘Emergency dwelling’, home front: new developments in housing, architectural design journal guest-edited by bullivant lucy, p. 58, Wileyacademy, volume 73 no. 4, Issue july/august 2003.
1.12 Http://cubeme.Com/blog/2010/09/21/life-cube-inflatableemergency-shelter/
1.13 Http://inhabitat.Com/1000-duany-shelters-to-be-donated-to-haiti/ 1.15 Http://www.Flickr.Com/photos/chfinternational/1260684763/ 1.17 Http://jeffwerner.Ca/2006/06/shigeru_ban.Html
1.18 Http://yyasutake.Blogspot.Com/2009_08_01_archive.Html
1.19 Http://archlib.Njit.Edu/aboutus/banlecture.Php
1.20 Http://www.Guardian.Co.Uk/world/2011/jan/06/haiti-earthquakeone-year-on
1.21 Http://medlibrary.Org/medwiki/tensegrity
1.24 Http://commons.Wikimedia.Org/wiki/file:tensegrity_tetrahedron. Png
1.25 Http://www.Marlboroughgallery.Com/galleries/new-york/artists/ kenneth-snelson
1.26 Http://reflexionarlespai.Blogspot.Com/ 1.27 Http://www.212Chiropractic.Com/about_chiro/what_is_ chiropractic.Htm
Http://tensegrity.Wikispaces.Com/spine Http://www.3Rdopinion.Us/prolotherapy.Html
1.29 Http://www.Jrank.Org/health/pages/22516/breathing-n.Html Http://images.Yourdictionary.Com/diaphragm
1.30 Http://www-3.Unipv.It/webbio/anatcomp/freitas/2007-2008/ biocell_lsbusb07-08.Htm
1.31 Http://jcs.Biologists.Org/cgi/content/full/116/7/1157
1.32 Http://jcs.Biologists.Org/cgi/content/full/116/7/1155
1.33 Http://jap.Physiology.Org/content/89/4/1663/f2.Expansion.Html
1.34 Http://kennethsnelson.Net/2010/sleeping-dragon/
1.35 Http://photos.Igougo.Com/pictures-photos-p328826-snelsons_ needle_tower.Html
1.36 Http://www.Worldisround.Com/articles/356378/photo44.Html
1.37 Http://www.Archdaily.Com/wp-content/ uploads/2009/01/1833331501
1.38 Http://www.Mero.De/fi leadmin/downloads/bausysteme/publikati onen/tens_tower_e.Pdf
1.39 Http://www.Mero.De/fi leadmin/downloads/bausysteme/publikati
onen/tens_tower_e.Pdf
1.40 Http://www.Mero.De/fi leadmin/downloads/bausysteme/publikati onen/tens_tower_e.Pdf
2.1 Http://www.Citrinitas.Com/history_of_viscom/computer.Html
2.6 ‘Two years of tensegrity modelling work¬shops at the university of shef¬field, school of architecture.’
2.7 ‘Two years of tensegrity modelling work¬shops at the university of shef¬field, school of architecture.’
2.8 ‘Two years of tensegrity modelling work¬shops at the university of shef¬field, school of architecture.’
2.9 ‘Two years of tensegrity modelling work¬shops at the university of shef¬field, school of architecture.’
2.10 Http://www.Cabinetmagazine.Org/issues/23/wertheim.Php
2.11 Automated discovery and optimization of large irregular tensegrity structures
2.12 Automated discovery and optimization of large irregular tensegrity structures
2.13 Automated discovery and optimization of large irregular tensegrity structures
2.14 Evolutionary formfinding of tensegrity structures
2.15 Evolutionary formfinding of tensegrity structures
2.15 Evolutionary formfinding of tensegrity structures
2.18 Http://vi.Sualize.Us/view/7ff 4037a987cac6d2b28a47ab4889870/
4.1 Http://www.Vagabondjourney.Com/travelogue/how-to-prepare-forcrossing-borders/
4.4 Http://www.Andaman.Org/maps/textmaps.Htm
4.5 Http://www.Indianetzone.Com/9/sentinelese_tribe.Htm Http://www.Smh.Com.Au/news/asia-tsunami/ancient-tribe-survives-tsu nami/2005/01/06/1104832239077.Html
Http://www.Wayn.Com/waynphotos.Html?Wci=photo&photo_key=28806 012&member=17736948#pkey=28806012
4.7 Http://academic.Evergreen.Edu/g/grossmaz/cramerbd/ 4.8 Http://earthquake.Usgs.Gov/earthquakes/eqinthenews/2004/ usslav/
4.9 Http://db.And.Nic.In/nicobar/profile/people.Htm
Assessing post-tsunami housing reconstruction in andaman & nicobar islands
Www.Inde-design.Org
4.10 Www.Inde-design.Org
4.11 Assessing post-tsunami housing reconstruction in andaman & nicobar islands
4.12 ‘Tropi¬cal architecture’, pre¬stel, munich, 2005.
4.16 Town & country planning organization, ministry of urban development, govt. Of india
4.17 Town & country planning organization, ministry of urban development, govt. Of india
4.14 Www.Inde-design.Org
6. Http://tensegrity-structures.Blogspot.Com/
6. Bamboo poles for spatial and light structures
RIDDHI OSWAL | MArch | Emergent Technologies and Design | Architectural Association School of Architecture | 2009-11 156
