Mitigating GNSS disruptions as ionospheric disturbances move to peak
Understanding autonomous exploration with UAVs
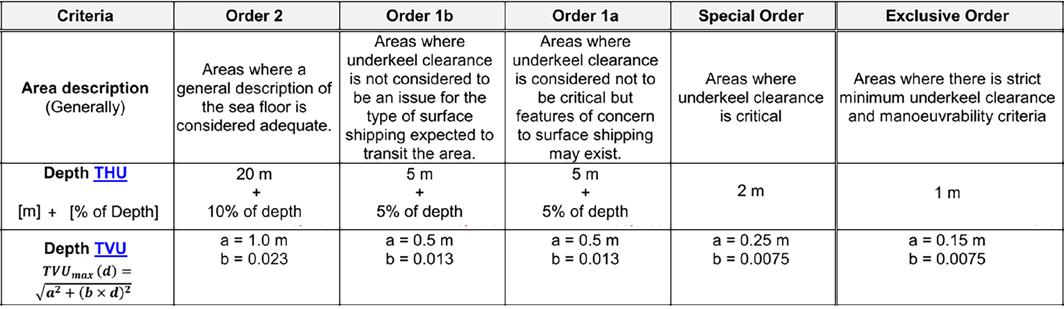
Photogrammetry and Lidar: accuracy vs. specifications
Rescuing land administration projects from isolation
Professional SLAM System
Exceptional Photo Quality
Remarkable Accuracy
Unmatched Flexibility
Director Strategy & Business Development
Durk Haarsma
Financial Director Meine van der Bijl
Technical Editor Huibert-Jan Lekkerkerk
Contributing Editors Dr Rohan Bennett, Frédérique Coumans, Lars Langhorst
Head of Content Wim van Wegen
Copy Editor Lynn Radford, Englishproof.nl
Marketing Advisors Peter Tapken, Sandro Steunebrink, Myrthe van der Schuit
Circulation Manager Adrian Holland
Design Persmanager, The Hague
GIM International, one of the worldwide leading magazines in the geospatial industry, is published five times per year by Geomares. The magazine and related website and newsletter provide topical overviews and reports on the latest news, trends and developments in geomatics all around the world. GIM International is orientated towards a professional and managerial readership, those leading decision making, and has a worldwide circulation.
Subscriptions
GIM International is available five times per year on a subscription basis. Geospatial professionals can subscribe at any time via https://www.gim-international.com/subscribe/ print. Subscriptions will be automatically renewed upon expiry, unless Geomares receives written notification of cancellation at least 60 days before expiry date.
Advertisements
Information about advertising and deadlines are available in the media planner. For more information please contact our marketing advisor: myrthe.van.der.schuit@geomares.nl.
Editorial Contributions
All material submitted to Geomares and relating to GIM International will be treated as unconditionally assigned for publication under copyright subject to the editor’s unrestricted right to edit and offer editorial comment. Geomares assumes no responsibility for unsolicited material or for the accuracy of information thus received. Geomares assumes, in addition, no obligation to return material if not explicitly requested. Contributions must be sent for the attention of the head of content: wim.van.wegen@geomares.nl.
Over the past 25 years, EuroGeographics has evolved from a ‘dining club’ into an influential non-profit association. In this interview, Sallie Payne Snell discusses the current and future challenges, including helping national mapping, cadastral and land registration agencies to remain relevant in an increasingly digital and geopolitical landscape.
Many articles on airborne Lidar and photogrammetric surveys have been published, often addressing the question of accuracy. Responses vary in value and quotation methods, with accuracy being crucial in both articles and contract specifications. This article provides an overview of terminology and method.
Innovative intervention strategies to overcome some of the main challenges in land administration reforms are emerging. This article identifies opportunities to improve intervention approaches driven by broader policy agendas and technology.
While recent innovations, like AI, make headlines, advances in the geospatial sector have historically progressed rapidly yet quietly as a technological continuum. This article explores how today’s breakthroughs deliver practical, impactful applications – without the glitz.
Accurate tree location is vital for forest inventories, yet under-canopy GNSS signals do not provide required precision. A study conducted in Finland compared various laser scanning method against total station positioning data in a boreal forest to explore efficient alternatives for precise individual tree positioning.
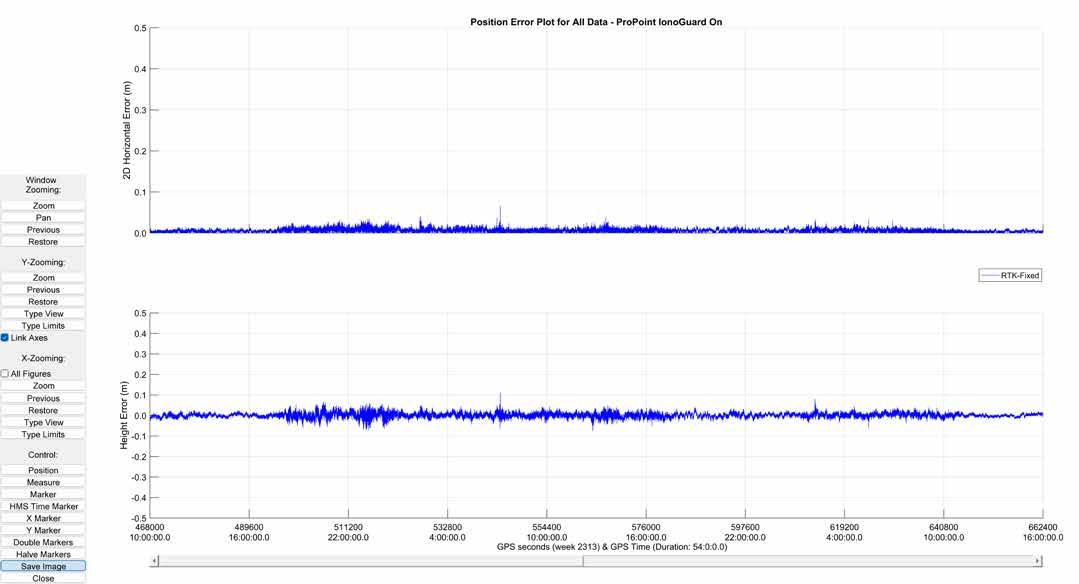
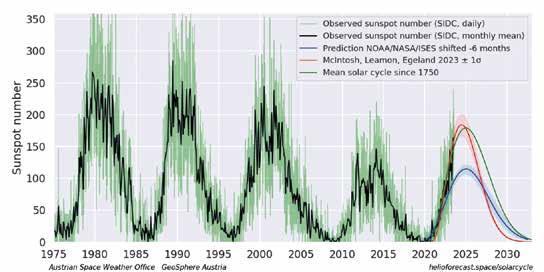
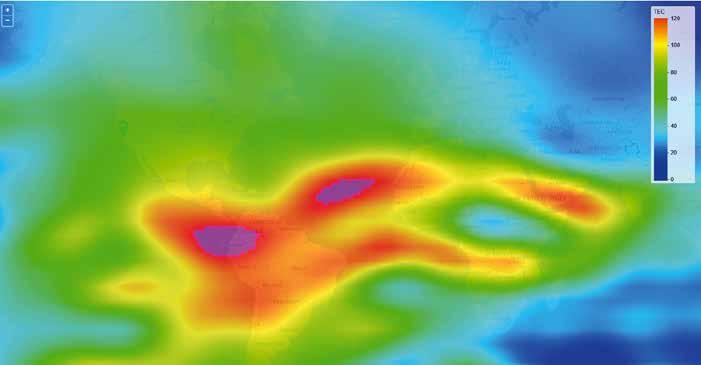
As the solar cycle peaks this year, increased solar storms and ionospheric disturbances may cause GNSS signal fluctuations. This article explores how geospatial professionals can proactively plan and prepare for these effects in order to maintain operational resilience.
When it comes to developing UAV autonomy, SLAM, autonomous path planning and next best view (NBV) are all central algorithms. This article explains these techniques and also their interrelationships, highlighting the critical role each one plays in achieving full autonomy in drone operations.
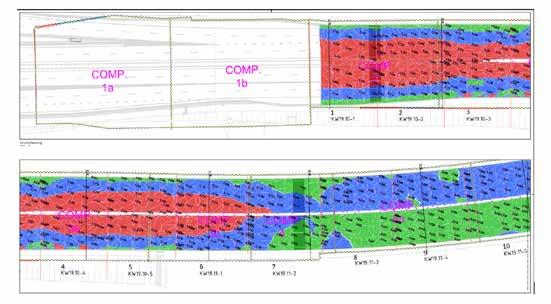
Advanced surveying is vital in infrastructure, enabling efficient design and precise execution. A major highway project in the northern Netherlands exemplifies this, with Geomaat surveyors and site engineers closely involved in every phase.
On the front cover of this issue: Coastal Process Scientist Jonathan Bailey can be seen conducting coastal monitoring at Wembury Beach as part of the South West Coastal Monitoring Programme in England (image courtesy: Teignbridge District Council). The programme is part of a national network of regional coastal monitoring initiatives funded by the UK Department for Environment, Food and Rural Affairs (Defra).
We proudly present our premium members, the ambassadors of tomorrow's geomatics!
Will you be next?
Gold members
Silver members
Bronze members
Human after all
Nearly 70 years ago, Herbert Simon – who can be considered as a true pioneer in the field of artificial intelligence (AI) – predicted that AI would beat human chess players within a decade. Subsequently, in 1965, he claimed that “machines will be capable, within 20 years, of doing any work a man can do”. While those predictions may have been a little bit optimistic (after all, it wasn’t until February 1996 that Deep Blue became the first machine to defeat a reigning world champion, namely Garry Kasparov), Simon clearly had a genius mind that was quick to foresee the huge potential of AI.
I would also like to pay tribute to another visionary: the brilliant Alan Turing. In 1950, this legendary mathematician reshaped the conversation around machine intelligence with his groundbreaking paper on ‘Computing Machinery and Intelligence’. Rather than asking whether machines could think, Turing proposed a practical test: the Imitation Game. If a computer could engage in a text-based exchange well enough to be indistinguishable from a human, it would demonstrate a form of intelligence. This idea formed the foundation for modern AI research.
Despite their different areas of emphasis, both researchers were certainly highly influential in laying the foundations for machine learning. Without Turing and Simon, the current breakthroughs in AI would not have been possible. In fact, many modern AI concepts originate from their ideas. And even though AI is now much faster than Turing and Simon ever predicted, this does not detract from the fact that they were way ahead of their time in conceptual thinking; they simply could not foresee the exact speed and scale with which things would develop.
Fast-forward to 2025, and AI is undeniably a hot topic in the geospatial community. At the same time, we also see Gaussian splatting emerging. Based on a machinelearning algorithm, this innovation renders millions of ‘splats’ per image, resulting in highly realistic 3D scenes with remarkable efficiency and speed. As a result, Gaussian splatting is taking over 3D computer graphics and is about to change our relationship to the virtual world. With AI optimizing this process, it also paves the way for more real-time analysis and extremely efficient workflows, which will require mappers and surveyors to adapt by learning new tools and technologies. In the years ahead, not only rapidly evolving AI but also the progress around autonomous systems and remote sensing will play a key role in revolutionizing how geospatial data is acquired, analysed and shared.
But against the backdrop of all these rapid advancements in AI and automation, let’s remember – as Daft Punk remind us with their song ‘Human After All’ – that we are still human beings. In the world of surveying and mapping, the people aspect remains essential. Perhaps real change isn’t driven by the machines themselves, but by how we, as humans, adapt to them and shape the transformation.
Wim van Wegen head of content, GIM International
Topcon and FARO form strategic alliance in laser scanning technology
Topcon Corporation and FARO Technologies have entered into a strategic agreement to collaborate on the development and distribution of solutions in the laser scanning market. This partnership is expected to broaden access to advanced digital reality technologies, and lead to complementary product innovations, including the integration of Topcon and Sokkia solutions with FARO’s offerings. The collaboration seeks to combine the expertise of both companies to enhance technological capabilities for professionals in various fields. It will focus on advancing laser scanning technologies with an emphasis on key sectors such as construction, surveying, mapping, architecture, forensics, building information modelling (BIM), and industrial plant and process applications. Under the agreement, FARO and Topcon aim to explore new avenues for collaboration, focusing on developing joint product solutions and improving software integration to better meet user needs.
Juniper Systems introduces Galileo HAS-enabled Geode GNSS receiver
Juniper Systems has unveiled the new Geode GNS3H, built to work with the Galileo High Accuracy Service (HAS). Galileo HAS delivers worldwide positioning with an impressive 20cm accuracy. It is a feature of the Galileo GNSS, developed by the European Union. HAS provides high-precision positioning services to users by delivering free correction data via Galileo satellites and the internet. This service is specifically tailored for applications that require greater precision than standard GNSS, making it a valuable tool for industries that depend on reliable, high-accuracy location data. Though it is still in the initial phase of the specifications with ‘relaxed performance standards’, the promise of HAS eventually delivering 20cm location accuracy in under five minutes will be a dramatic productivity boost for mapping and GIS professionals worldwide. With Galileo HAS, sub-metre becomes sub-foot as the new standard for free and open global GNSS positioning. This enhanced accuracy will be invaluable across numerous industries, unlocking new possibilities in precision navigation, surveying, agriculture, construction, forestry, mining, archaeology and more.
Juniper Systems providing a Galileo High Accuracy Service GNSS receiver to the marketplace is regarded as a milestone in the industry. (Image courtesy: Juniper Systems)
NSG and Esri collaborate to drive geospatial innovation in Saudi Arabia
Esri has signed a Memorandum of Understanding (MoU) with Neo Space Group (NSG), a public investment fund company and Saudi Arabia’s leading provider of commercial space services. This landmark agreement was finalized during the Esri Saudi User Conference 2025, held in Riyadh. The MoU was signed by Martijn Blanken, CEO of Neo Space Group, and Jack Dangermond, founder and president of Esri, a world leader in GIS technology. This partnership is regarded as a major step towards strengthening the geospatial sector in Saudi Arabia and beyond, aligning with the Kingdom’s Vision 2030 goals. Geospatial solutions are reshaping the space technology landscape, driving economic diversification and advancing key national priorities with innovative applications across industries. Martijn Blanken, CEO of NSG, said: “By combining NSG’s expertise in providing a broad range of geospatial services and Esri’s cuttingedge GIS technology, this partnership aims to drive innovation and unlock new opportunities in talent development, research and development (R&D), and leveraging Earth observation data for critical applications. This collaboration will focus on R&D initiatives that push the boundaries of geospatial technology, delivering groundbreaking solutions across various sectors.”
The MoU was signed by Martijn Blanken, CEO of Neo Space Group (left), and Jack Dangermond, founder and president of Esri (right), formalizing a strategic collaboration between the two parties. (Image courtesy: NSG)
Topcon and FARO representatives at the start of the strategic agreement between the two companies.
New joint venture propels 3D Earth observation satellite initiative
OxTS has launched WayFinder, a new solution designed to enable localization in GNSS-denied environments. Integrating a GNSS/INS system, an onboard processor, a Lidar scanner and two cameras, the solution enables localization in urban canyons, underground tunnels and other areas with limited satellite coverage, opening up potential applications in multiple sectors. Accurate localization data is fundamental to a wide range of industries, from autonomous navigation to automotive testing and georeferencing sensor data. However, a persistent challenge remains: obtaining precise positioning information in areas where GNSS signals are weak or entirely unavailable. WayFinder integrates a GNSS/ INS system, an onboard processor, a Lidar scanner and two cameras to provide a seamless navigation solution. It is designed to function out of the box, requiring only basic configuration before it is operational. The key to its capability lies in LiDAR Boost, a newly developed software technology that enhances OxTS’s GNSS/INS performance in environments where satellite signals are unreliable.
Marble Visions, backed by NTT DATA, PASCO and Canon Electronics, has launched the development of a high-resolution, high-frequency satellite system. This joint venture aims to revolutionize geospatial data collection and digital twin technology, paving the way for more precise and dynamic Earth observation. Marble Visions is a subsidiary of NTT DATA, established to pioneer next-generation digital twin solutions. In 2024, Marble Visions was selected for the Japan Aerospace Exploration Agency’s (JAXA) Space Strategy Fund’s ‘Optical observation satellite system with high resolution/high frequency’ project. Following JAXA’s grant approval in early 2025, Marble Visions partnered with PASCO and Canon Electronics to develop a state-ofthe-art 3D Earth observation satellite system. The company’s goal is to transform global digital mapping by integrating satellite data into high-frequency 3D digital twin environments. Marble Visions aims to replace traditional 3D maps including digital elevation models (DEMs) –which are only updated every five years globally, or every one to two years for major urban areas – with its new satellite constellation. This system will update global 3D maps annually, with updates to major urban areas every three to six months. With the first satellite launch scheduled for 2027, Marble Visions will provide an integrated solution that combines 40cm-resolution imagery, 3D maps and digital twin platforms to facilitate high-frequency environmental monitoring, urban development analysis, climate resilience and infrastructure planning.
Getac has launched the ZX10 10-inch fully rugged Android tablet, which combines lightweight design with powerful AI-ready performance and intuitive Android functionality. The next-generation ZX10 is aimed at professionals working in industries that require devices they can trust in the challenging environments and scenarios they encounter daily. The new tablet provides essential benefits for land surveyors and geomatics specialists conducting on-site tasks. Powerful processors, GPS functionality and precise measurement software enable efficient data collection by land surveyors and geometry specialists. At the heart of the next-generation ZX10 are Qualcomm’s QCS6490 processor and neural processor unit (NPU). These are purpose-built to support advanced artificial intelligence (AI) capabilities and deliver high performance, even at lower power levels. Other key features include advanced memory (8GB LPDDR5) for fast data transfer and up to 256GB of universal flash storage (UFS) for a smooth and seamless user experience when running multiple applications simultaneously. Like all Getac devices, the ZX10 is rugged by design to minimize downtime and support productivity in challenging environments. With MIL-STD-810H certification, IP66 certification and 6ft drop resistance, it can withstand the rigours of intensive field work.
WayFinder is designed as an all-in-one GNSS-denied navigation solution. (Image courtesy: OxTS)
Marble Visions is partnering with PASCO and Canon Electronics to build the next frontier of 3D Earth observation through an advanced satellite system. (Image courtesy: Marble Visions)
The new ZX10 tablet. (Image courtesy: Getac)
Planet Labs strengthens global reach with major satellite partnership
Planet Labs has entered a multi-year US$230 million agreement to expand its partnership with a long-standing Asia-Pacific commercial partner. Under the agreement, Planet will develop and deploy a new constellation of high-resolution Pelican satellites, reserving dedicated capacity for the partner while also providing operational services. The expanded fleet’s increased capacity will enable Planet to better serve its governmental and commercial customers worldwide. Will Marshall, Planet’s CEO and co-founder, described the agreement as a significant milestone for the company, marking its largest contract to date and a major step towards tapping into a vast market for satellite services.
“These types of partnerships are a win-win: our partners gain critical satellite capabilities and priority access to leading-edge technology, while they help Planet accelerate key space programmes and create synergistic benefits for all our customers,” he explained. He added that Planet is strategically pursuing a select number of similar opportunities across its Pelican, Tanager and SuperDove satellites, targeting the defence & intelligence, civil government and commercial sectors. James Mason, Planet’s chief space officer, emphasized that the announcement reinforces the company’s ability to leverage its advanced space systems and intellectual property to create unique value for partners.
“Our trusted partners have long expressed interest in our proprietary space systems technology, and we’re proud to be able to fulfil their needs with our satellites and services,” he said. He also highlighted how Planet’s vertical integration and agile aerospace capabilities allow the company to scale to meet both customer and partner demand.
Luxembourg institute secures ESA funding for Digital Twin of the Earth projects
As part of the European Space Agency’s latest Digital Twin of the Earth initiative, the Luxembourg Institute of Science and Technology (LIST) is leading three new projects. Centered on agriculture, urban resilience, and coastal sustainability, these projects will harness LIST’s expertise in satellite Earth observation (EO) data processing and environmental modelling to address critical global challenges. The European Space Agency (ESA) initiative focuses on advancing EO-based digital twin components (DTCs) to a pre-operational stage, creating sophisticated digital representations of Earth’s systems. By integrating satellite data, artificial intelligence (AI) and numerical simulations, these DTCs will become vital tools for scientific analysis and informed decision-making. Through this effort, ESA is strengthening the role of EO in tackling complex environmental and societal issues. In the realm of urban resilience, LIST is also contributing to a one-year ‘Early Development Action’ project, led by Italian company e-GEOS. This initiative aims to tackle urban heat islands and flooding, combining satellite data, advanced modelling techniques and AI for EO to create turnkey solutions for managing climate-induced risks in urban areas. In this framework, LIST will make use of two of its technologies: a patented radar-based technology enabling accurate flood mapping in cities, combined with the high-resolution monitoring of built-up areas, offering near-real-time satellite imagery updates of urban infrastructures affected by flooding. The researchers will thus explore the impact of various climate scenarios on urban infrastructure, using hydrological models to assess and mitigate risks associated with urban flooding and heatwaves.
Rendering of a Pelican satellite. (Image courtesy: Planet Labs)
Satellite image of Luxembourg captured by the Copernicus Sentinel-2 mission. (Image courtesy: ESA)
Leica CoastalMapper opens up new airborne bathymetric mapping possibilities
Leica Geosystems, part of Hexagon, has unveiled the Leica CoastalMapper. According to the manufacturer, the new airborne bathymetric Lidar solution increases coastline and river survey efficiency by 250% compared to previous sensor generations, thanks to a wider field of view and the ability to be flown at higher altitudes. As airborne Lidar bathymetry continues to advance, it is poised to become an essential tool for hydrographic surveyors, attracting significant interest within the industry. The CoastalMapper represents an advanced approach to airborne hydrographic mapping, supporting applications such as infrastructure resilience assessments, river flood monitoring and environmental studies in both shallow and deep waters. “We aim to empower our community with tools that meet current needs, anticipate future challenges and push the boundaries of bathymetric mapping,” stated Anders Ekelund, vice president of airborne bathymetric Lidar at Leica Geosystems. “We’re beyond pleased to offer our customers this radically enhanced system for more detailed and efficient surveys. Powering easier yet more comprehensive data analysis and supporting a broad range of bathymetric applications, the CoastalMapper opens mapping possibilities that were hard to achieve before.” The CoastalMapper integrates a high-performance bathymetric Lidar module with a Leica TerrainMapper-3 topographic Lidar and imaging sensor in a compact, lightweight sensor head. It captures up to one million bathymetric and two million topographic data points per second, while providing RGB imagery at a 5cm ground sampling distance (GSD) and NIR at a 7cm GSD. Covering up to 360km² per hour, the system enables efficient, high-resolution data collection.
Nigeria launches drone surveying pilot project to map capital Abuja
In one of the first such initiatives in Africa, Nigeria is set to launch a pioneering drone survey project aimed at creating digital twin maps of the country’s capital, Abuja. The project will utilize drone technology to capture 3D representations of buildings, providing an accurate and real-time digital model of the city’s landscape. The project, which will be carried out over a timespan of three weeks, aims to advance land surveying and geospatial capabilities. With the growing importance of accurate geospatial data, this initiative will help modernize surveying practices and support urban planning and development efforts. Collaboration with international experts will provide the technical support needed to process the data, further enhancing the country’s ability to leverage the latest technologies in geospatial information management. The project is also aligned with the broader goals of sustainable development, as surveying plays a key role in achieving 14 of the 17 Sustainable Development Goals (SDGs). If successful, this project could pave the way for similar mapping initiatives in other Nigerian cities, while also serving as a model for other African countries. It would further enhance the country’s geospatial capabilities and support its urban development goals.
Ordnance Survey unlocks new data-driven innovation with Snowflake
Ordnance Survey (OS), the UK’s leading mapping authority, has revealed that its open datasets are now available through Snowflake Marketplace. This paves the way for innovation across sectors from urban development and electric vehicle (EV) infrastructure planning, to environmental monitoring, emergency response and other essential location-based services. Therefore, allowing users to access OS’s trusted location data via Snowflake’s platform opens the door to a wealth of possibilities. The Snowflake AI Data Cloud makes it easier for users to directly access OS data within applications such as web mapping tools, Geographic Information Systems (GIS) and business intelligence platforms. This streamlined access will help organizations improve workflows, reduce data management complexity and enable more effective, data-driven decision-making. Open datasets available on Snowflake Marketplace include Open Names, Open Rivers, Open Roads, Open Greenspace, Built-Up Areas, Open UPRN, and Boundary Line. “Location data is the invisible fabric of modern Britain – it connects data to places. By applying a geospatial lens, data can be brought to life through maps and other forms of visualizations. It adds so much more context beyond traditional spreadsheets and databases. Collaborating with Snowflake allows us to share our authoritative data with a wider audience and seamlessly integrate location data into various analytics tools and platforms,” said Nick Bolton, CEO, Ordnance Survey.
OS Open Greenspace, the UK’s most comprehensive open greenspace dataset, provides the foundation for creating greener, healthier communities. (Image courtesy: Crown copyright and Crown database rights, Ordnance Survey)
An aerial view of Abuja, the capital of Nigeria, captured by a Mavic 3 Pro drone. (Image courtesy: Oussama Obeid/Shutterstock)
GIM International
interviews Sallie Payne Snell, secretary general and executive director of EuroGeographics
25 years of EuroGeographics: driving spatial data harmonization forward
By Durk Haarsma, GIM International
Over the past 25 years, EuroGeographics has evolved from a ‘dining club’ into an influential non-profit association. In this interview, Sallie Payne Snell discusses the current and future challenges, including helping national mapping, cadastral and land registration agencies to remain relevant in an increasingly digital and geopolitical landscape. “It’s important for national mapping agencies to understand that while they have a national remit, their continued relevance depends on their data being used regionally and globally too,” she says.
How do you view EuroGeographics’ role in relation to the UN’s geospatial initiatives?
EuroGeographics is primarily a delivery organization – we focus on delivering tangible benefits and moving things forward. Although the UN process tends to be slower, the UN brand carries considerable weight. The United Nations Committee of Experts on Global Geospatial Information Management (UN-GGIM) is recognized for its significance as a high-level policy driver and I believe it now needs to find a clear direction for its next phase to ensure it continues to engage people’s interest. Our collaboration with its Secretariat, the United Nations Statistics Division (UNSD), provides a platform for knowledge exchange and capacity building with a focus on avoiding duplication and emphasizing complementarity of our two very different organizations.
Globally, EuroGeographics actively supports and contributes to UN-GGIM as an Observer Organization. At European level, we are an observer on the UN-GGIM Europe Executive Committee for which we have provided the secretariat through a service-level agreement with Kadaster Netherlands since 2015.
How has EuroGeographics evolved to support national mapping, cadastral and land registration agencies in an increasingly digital landscape?
This is an interesting question, especially as EuroGeographics celebrates its 25th anniversary this year. We’ve evolved from what could be called a ‘dining club’ where people came together to discuss issues, into an influential non-profit association. We’ve developed extremely strong knowledge exchange and representation capabilities. Recently, we wrote to 26 newly appointed commissioners in the EU, and we’ve already heard back from 12, with three confirmed meetings in January. This response is particularly positive as several referenced our Open Maps for Europe project.
Can you tell us more about the Open Maps for Europe project?
Open Maps for Europe aligned with the PSI directive to open data, which DG Connect wanted. We opened up our small-scale harmonized pan-European products, including EuroGlobalMap, EuroRegionalMap (1:1 million and 1:250,000 scales), an imagery layer covering all of Europe, and a regional gazetteer. We also started a pilot project looking at high-value data for cadastral information. The project was incredibly successful, with user numbers increasing by over 800%.
Following that success, DG Connect encouraged us to do more. We received significant user feedback indicating that people want
harmonized, pan-European, official data at a larger scale – around 1:10,000 scale. This is particularly important for key stakeholders like Eurostat, which is interested in boundary data, and the European Environment Agency, which focuses on hydrography. This led to our Open Maps For Europe 2 (OME2) proposal, which we developed with production experts from Germany, France, the Netherlands, Belgium, Iceland and Austria. Having started in 2023, OME2 is developing a new production process and technical specification for free-to-use, edge-matched high-value data under a single open licence. The project is co-funded by the European Union and is being delivered by a consortium comprising us as well as National Geographic Institute, Belgium, National Institute of Geographic and Forest Information, France, Hellenic Cadastre, General Directorate for the Cadastre, Spain, and Cadastre, Land Registry and Mapping Agency, the Netherlands. It corresponds with member states’ obligations to implement high-value data and will be completed at the end of this year.
How are you working to influence EU policy?
We’ve managed to influence policy through successful project delivery. Recently, we had a significant breakthrough when we presented at the European Parliament in Strasbourg. This led to a project proposal being accepted with €2 million in funding, which will help establish a policy home for geospatial data within the EU. This success came from demonstrating the practical value of harmonized data through projects like OME2. We’re now at a point where EU bodies are coming to us for advice, which shows we’re making a real impact.
You mentioned strong knowledge exchange capabilities. How do you facilitate knowledge exchange among members in practice?
We organize various events through our knowledge exchange networks, General Assembly, and permanent correspondence events. We hold many online events and webinars where members share case studies and learn from each other. What’s interesting is that while some mapping agencies have been around for a long time with lots of knowledge and experience, this isn’t always an advantage. Take Estonia, for example – their newer status means they can embrace new technologies without the burden of legacy systems. So the knowledge exchange isn’t just one-way from established agencies; newer organizations often bring fresh perspectives and innovative approaches that others can learn from.
What do you see as the most significant challenges facing European spatial data in the coming years?
When it comes to harmonizing data across different European countries, one of the main challenges is dealing with different
Turn complexity into confidence.
When everything’s on the line, confidence is your greatest asset. With instant access to accurate reality capture data for every stakeholder, from the field to the boardroom, you eliminate second-guessing and delays, fostering seamless collaboration built on unwavering trust.
That’s the power of the latest extension to Trimble® Connect® . Now, you can securely store, manage and share even the most massive scan datasets in the cloud, empowering informed decisions, anywhere, anytime.
interpretations of standards. For example, what’s defined as a motorway in one country might be classified differently in another. While we have an INSPIRE specification, countries have interpreted it in different ways. The challenge is not always about the standard itself, but about aligning definitions across borders to ensure continuity in the data.
And for the national mapping agencies themselves, the main challenge is to remain relevant. In today’s world, data is everywhere and easily accessible – we all use Google Maps to find the nearest pub. However, there’s still a fundamental importance to large-scale authoritative data, whether for emergency services or property transactions. The challenge is ensuring national mapping agencies stay relevant by having their data used and relied upon. Another challenge is not getting lost in the sea of information. While Earth observation data and fancy visualizations are exciting, without the reference data to geolocate that information, it’s just a nice picture.
What’s your strategy for ensuring the relevance of national mapping agencies?
If we want national mapping and cadastral agencies to remain relevant, their data must be both accessible and usable, so that’s what our strategy focuses on. Anyone can get data now, but the key question is whether they can use it effectively. This is particularly important when addressing challenges like climate change and migration in Europe, which require good core reference data. We need to invest in creating datasets that users want, and build a value proposition where users understand that while the data is free, the service around making it usable needs to be funded.
How does Europe compare to other global powers like the US and China in terms of spatial data policy?
Looking at UN-GGIM, Europe is quite effective due to its structures. We have well-managed, high-quality national mapping data, supported by legislative frameworks like GDPR, the Interoperability Act, INSPIRE and open data regulations. While it’s not perfect, we have good infrastructure, and other regions often look to Europe for direction. Regarding big companies like Google, we see them not as competitors but as part of the geospatial ecosystem. They would love to have our data, but they’re not investing in creating it because the expertise sits within the mapping agencies.
What’s your view on INSPIRE’s impact on business opportunities?
While INSPIRE was meant to boost business opportunities, the reality is that implementation varied across countries. The European Union’s dream of seamlessly stitching together data from Germany, France, Spain and Portugal hasn’t materialized. INSPIRE is currently under review, with a focus on harmonization and integration – which aligns with what we’re doing. We’re taking INSPIRE data from mapping agencies and working on the harmonization aspect. While it hasn’t achieved its initial goals, we hope that with the review and our work with members, that dream of supporting economic growth and development will be realized.
About Sallie Payne Snell
Sallie Payne Snell is secretary general and executive director of EuroGeographics. A highly respected senior manager, she has an international network of geospatial contacts gained through extensive relationship and reputation management experience. Sallie represents EuroGeographics in its capacity as Observer Organization at both the United Nations Committee of Experts on Global Geospatial Information Management (UN-GGIM) and UN-GGIM: Europe. Her previous positions include deputy director at the Association for Geographic Information, and international stakeholder relationship manager at Ordnance Survey. She holds a BSc in Geographical Science.
Where do you see EuroGeographics in five years?
By 2030, we aim to have a self-funding production stream for largescale data used by the European Commission, European users and global users. We already work with the UN One Situation Room, providing Euro Global Map at 1:1,000,000 scale for Europe. Ideally, we want to stop producing small-scale data separately and instead generalize from one large-scale database. We’d like to see a dedicated home for geospatial data within the European infrastructure – a coordinating body across all DGs. Globally, we want to ensure that geospatial data is recognized as fundamental to achieving sustainable development goals.
What message would you like to share with GIM International readers?
It’s important for national mapping agencies to understand that while they have a national remit, their continued relevance depends on their data being used not just nationally, but regionally and globally. While mapping alone won’t solve global challenges like climate change, it provides the infrastructure and tools that enable better decisionmaking through accurate data. There’s also an increasing security element to consider, balancing open data policies with security concerns, particularly in the current global context.
EuroGeographics is celebrating its 25th anniversary this year. How are you marking this milestone?
We’re holding our General Assembly in Riga, Latvia, in May. We’ve invited past presidents and secretary generals to the opening session, where we’ll look back at our history and forward to our future. We’ll have a 25th anniversary gala dinner, and we’ve created a special anniversary logo. We’re also producing a document for our members highlighting major milestones in EuroGeographics’ history. It’s going to be more than just a celebration – it’s a pivotal point as we make strategic decisions about our direction for the next five years.
Innovative new approaches to land administration interventions
Rescuing land administration projects from isolation
By Dr Robin McLaren, Know Edge Ltd, UK
When it comes to achieving successful land administration sector reforms, development partners face considerable challenges, such as a lack of ongoing political support, limited access to resources, and aid being diverted to other sectors. However, innovative intervention strategies to overcome these challenges are emerging. This article identifies opportunities for improving intervention approaches that are being driven by wider policy agendas and technology.
Over the past decade there have been both negative and positive changes to the land administration reform landscape. The current regional conflicts, such as in Ukraine and the Middle East, and the aftermath of other conflicts are rightly attracting significant levels of humanitarian aid. This has reduced the level of aid for lower-priority sectors, such as land administration, resulting in fewer standalone land projects. Some nations that have traditionally been generous in their foreign aid in the land sector have been cutting back. The UK, Norway and most recently USA are examples.
Access to appropriate funding has become a serious issue. The approach to financing projects, either through loans or aid, has not changed. Financing is still focused on upfront capital investments. There is normally no revenue component included for maintenance, and this often leads to poor project sustainability. This is further compounded by funding being unavailable for the entire duration of country programmes that can last ten years or more. These programmes have to be segmented and interrupted, typically into three to fiveyear bites. This leads to discontinuities and potential impacts due to changes in political leadership and support.
Under-performing land administration projects
Moreover, not all interventions by development partners have been successful.
This has left a legacy of risk surrounding land administration reforms that has impacted and reduced the level of aid in this sector. Political support for reforms is often weakened due to these perceived risks, the considerable duration of projects that normally complete outside the political election cycle, and land administration projects not being recognized as supporting the key policy agendas. This poor political support often leads to very limited reforms in governance, institutions and the legal frameworks necessary to underpin successful projects.
Resourcing is also an inherent problem in reform projects. There is difficulty in retaining staff, especially with IT skills, and access to international experience and skills in land administration is increasingly more difficult to obtain. The number of universities across the world providing degrees or continued professional development (CPD) for land professionals has significantly reduced. This decline in capacity has resulted in fewer land administration projects and poorer-quality outcomes. Poor programme/contract management skills are often linked to overly ambitious goals leading to disastrous projects. At a higher level, recipient countries are also confused by the mixed reform messages and approaches being proposed by different UN agencies and development partners. These failed and under-performing projects have lessened
the enthusiasm of development partners to fund these types of projects. Instead they prefer ‘less risky’ projects in education and civil society, for example.
Despite these challenges, there have also been some notable successes in land administration reforms over the last 30 years. Examples include the World Bank’s reforms in the post-communist period in Europe and Central Asia, UK’s Ethiopia programme, major forest land tenure projects triggered by COP 26, and the widespread adoption of the fit-for-purpose land administration (FFPLA) methodology that is accelerating reforms, as successfully demonstrated by Rwanda and Indonesia.
Opportunities for change
There are a number of innovative intervention options that can be adopted –perhaps in combination – by development partners to achieve more effective land administration reforms:
Adopt a politically informed approach
Land administration reform projects aligned with a country’s political economy – i.e. how politics affects the economy, and how the economy in turn shapes politics – have a much higher degree of success. Rather than standalone land administration projects that do not directly interest the politicians, projects can be directly aligned with the political agenda and policies, such as climate change mitigation and adaption,
Figure 1: The last decade has seen the emergence of fit-for-purpose land administration as the default approach being implemented. (Adapted from Enemark, McLaren, Lemmen 2021, Fit-for-Purpose Land Administration – Providing Secure Land Rights at Scale)
infrastructure and city resilience. This can have significant and very positive impacts.
Political economy-based approaches are adaptive rather than prescriptive and initially learn through multi-stakeholder pilot projects that engage with a range of stakeholders, including citizens. This is similar to the analogy of the ‘agile’ software development methodology. Many projects have typically failed because they have been too ambitious and idealistic. Instead, the scope and complexity need to be much more realistic, mirroring another software development approach: the minimum viable product (MVP). Once delivered and fully operational, the simpler solution can then be enhanced over time. In this political economy context, the change agents are coalitions, networks and leaders rather than the traditional approach involving officials and technical advisors.
New entry points
Rather than being classified as standalone projects, land administration projects should find new entry points as integral parts of the wider, priority policy agenda. Attractive entry points are larger policy-driven programmes such as climate change mitigation and adaption, city resilience, land for renewables, marine/land integration or marine cadastre. Land administration can just be a component of these programmes.
Increasingly, investments in key registers (authoritative and dynamically updated information about people, businesses and land and property) to support digital transformation are successful entry points for land administration projects. Remember that land rights
is a fundamental theme of national spatial data infrastructure (NSDI) and the UN-GGIM Integrated Geospatial Information Framework (IGIF) – another effective entry point. New revenue generation opportunities through property taxes are popular with local governments and ministries of finance, making them another very successful entry point.
Rather than solely engaging with the relevant land department, development partners should explore innovative new touch points in the country, such as the Earth observation agency, ministry of finance or statistical agency. This approach can potentially accelerate and apply more effective pressure for change.
Integrated multi-faceted projects
To leverage the economic potential of their land and property, citizens need not just land tenure – they need a portfolio of services. The incremental and fragmented delivery of this portfolio of technical and financial services makes their sustainable prosperity much more challenging. The FFPLA paradigm and the emerging, enabling technologies provide compelling opportunities to rethink how land administration and land management programmes are designed, integrated and implemented. Research has identified that a common set of geospatial base data, collected by and derived from drone and street-level imagery, can support a wide set of FFPLA services and land management functions, ranging from urban resilience and valuation to land registration and cadastre.
Multi-faceted projects bring together a much wider range of professions than in traditional land administration projects. These
Further reading
1. Third International Land Management Conference in collaboration with University of West England and Land International Network for Knowledge (LINK), March 2024. Abstracts, presentations and PowerPoints, accessed 10 December 2024 https://landinternational. network/3rd-international-landmanagement-conference-14-15march-2024#book-of-abstracts
2. Kathrine Kelm, 2024. Extending the World Bank IGIF Methodology into the Marine Domain, accessed 10 December 2024 https://ggim.un.org/ meetings/GGIM-committee/12thSession/side_events/World%20Bank. pdf
3. The Economist, 2024. AI Holds Tantalising Promise for the Emerging World, accessed 11 December 2024 https://www. economist.com/leaders/2024/01/25/ the-tantalising-promise-of-ai-for-theemerging-world
4. Kelm, K., Antos, S., McLaren, R., 2021. Applying the FFP Approach to Wider Land Management Functions. Land 2021, 10, 723, accessed 10 December 2024 https://doi. org/10.3390/land10070723
5. Adlington, G., Lamb, T., Tonchovska, R., McLaren, R., 2020. Real Estate Registration and Cadastre, Practical Lessons and Experiences, accessed 13 December 2024 https://gadlandreg.com
An illustration, a few years old but still relevant, depicting the goal of fit-for-purpose land administration: to first achieve full coverage and an overview, then gradually enhance spatial accuracy, legal standards, and institutional processes over time.
newly involved professionals can bring fresh perspectives and add significant value to delivering innovative solutions. This will be achieved through new touch points in a country bringing a rich set of insights into the country’s requirements, allowing more effective solutions to be implemented.
However, development partners often find this more holistic approach difficult to adopt due to their organizational divisions and associated silos of professional skills, the perceived difficulty in managing multifaceted programmes, and the complexity of interfacing with a range of recipient government ministries and departments. While none of these perceived restrictions are showstoppers, adopting these new approaches will require significant cultural and institutional changes from the development partners.
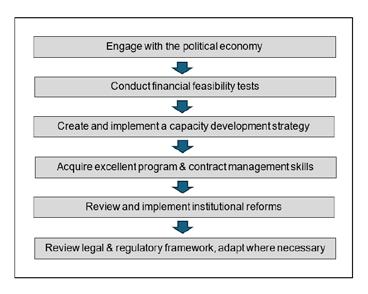
Project preparation phase
Complex land administration programmes need significant preparation time. This phase can typically take two to five years. In particular, it should include key activities such as engagement with the political economy, capacity development and financial feasibility. Too often in projects, not enough time is spent on the preparatory phase. This significantly increases the corresponding project risks.
Socio-economic impact assessment (SEIA)
Land administration projects rarely have corresponding business cases, and this creates problems when the ministry of finance and the development partner review the project’s financial feasibility. It is therefore recommended that economists are an integral part of the project team and SEIA toolkits are created to support land
Figure 2: Scope of land administration project preparatory phase.
administration projects. These could be adapted from the World Bank’s established IGIF implementation methodology to support the creation of NSDIs customized to specific countries and priorities. An excellent set of templates and toolkits is available for each of the steps.
Generative AI-driven customer interfaces
The user interface to land administration services is inherently complex, reflecting the intricacy of the legal and regulatory framework underpinning the services. This complexity and the technical language exclude many citizens from these services in developing countries. An article in The Economist highlighted how generative artificial intelligence (GenAI) stands to transform lives in the emerging world through better and more accessible public services. For example, India is combining large language models with speech-recognition software to enable illiterate farmers to ask a ‘bot’ how to apply for government loans.
There is a great opportunity to build a smaller and less expensive GenAI model (not ChatGPT) with a set of capabilities built specifically around land administration services for a country. Allowing direct access for all – without land professionals or trusted intermediaries – to a range of land services, this is a step beyond FFPLA. It is a compelling idea and hopefully can trigger some research.
About the author
Robin McLaren DSc is director of the UK-based independent consulting company Know Edge Ltd, specializing in geospatial information management, land reform and land administration. He is on a mission to make land administration services and security of tenure available to all. He received an honorary doctorate from the University of Glasgow in 2014 for his contributions to geomatics.
Realizing the opportunities
The land administration sector is at a turning point in its lifecycle, and we now have a better chance of providing security of tenure for all. This article has identified exciting opportunities that are emerging for development partners to adopt more effective intervention strategies to achieve successful land administration reforms. However, their implementation will have a big impact on development partners and land administration agencies, requiring them to change their culture, develop a new set of skills and establish fresh partnerships. The challenge is there for the taking.
Premium company membership
Online company profile
Home page highlight Member highlight
2x Company highlight
6x Social post
1/1-page ad in BG '26
Company profile in BG '26
3,150
Online company profile Home page highlight Member highlight
2x Company highlight
4x Social post
1/2-page ad in BG '26
Company profile in BG '26
Online company profile Home page highlight Member highlight
2x Company highlight
2x Social post
Company profile in BG '26
Towards an optimal approach for precise tree location mapping
Evaluating laser scanning positioning accuracy in forests
By Jesse Muhojoki, Antero Kukko and Juha Hyyppä, Finland
Accurate tree location is vital for forest inventories, yet under-canopy GNSS signals do not provide required precision. A study conducted in Finland compared various laser scanning methods – under-canopy drone, handheld scanner and high-density airborne laser scanning (ALS) – against total station positioning data in a boreal forest to explore efficient alternatives for precise individual tree positioning. Researchers evaluated the laser scanning positioning accuracy results and also assessed the potential of ALS as a geodetic-level reference, challenging traditional methods.
Forests are economically vital in many nations. Their industrial use often promotes increased tree planting, which has contributed to forest expansion in most Western countries over recent decades. However, forest expansion can come at the expense of biodiversity, carbon storage capacity and recreational value. Therefore, sustainable forest use requires detailed forest information. Precise location data for individual trees collected for the reference data of such inventories is essential and often requires sub-metre accuracy. Traditional methods, such as compass and tape measurements from a GNSS-derived plot centre, are commonly used for locating the trees.
Laser scanning has also proven its potential for generating nationwide, individual tree-level inventories, and such large-scale datasets have already been acquired in numerous European countries. However, the forest canopy’s obstruction of GNSS signals presents a significant challenge for accurately locating trees using modern geospatial technologies. While solutions such as simultaneous localization and mapping (SLAM) exist, there is a lack of comparative studies evaluating the positioning accuracy of different mobile laser scanners (MLS) for individual tree location. The positioning accuracy of laser scanning using an autonomous undercanopy drone – a promising approach for
acquiring field reference data – is also underreported. Furthermore, the assumption that traditional field measurements provide the most accurate reference remains largely unchallenged. Additionally, the potential of high-density airborne laser scanning (ALS) point clouds for geodetic-level positioning in forests has not been fully explored.
Addressing gaps and exploring assumptions
A recent study set out to address these gaps by comparing the laser scanning positioning accuracy of under-canopy drone and handheld laser scanners against both high-density ALS data and a total stationderived field reference. The researchers also evaluated the quality of the ALS-based reference data and investigated its potential as a more efficient alternative to traditional total station surveys for future studies.
The study was performed in a natural, low-tomedium-density boreal forest in Evo, Finland, on an 800m-long test track with maximum displacement of 300m (as depicted in Figure 1). The location of 224 trees close to the track was measured with a Trimble 5602 DR200+ total station for reference. Then, the track was measured using Hovermap and Deep Forestry autonomous drones flying under the forest canopy, and once more with a ZEB Horizon handheld laser scanner system. In addition, the site was measured with a helicopter-based ALS equipped with a RIEGL VUX-1HA laser scanner and GNSS-IMU
positioning system flying approximately 80m above the ground at 9.5m/s. This produced a point cloud with a density of 1,800 points/m2 (based on two overlapping flight lines).
The tree locations were extracted from the point clouds using an automatic algorithm that detects arc-shaped point clusters caused by laser-beam hits to the tree trunks. The tree locations were determined as the centres of the circles fitted to arcs located at 1.1-1.5m above the ground. If there were multiple arcs at this interval corresponding to the same tree, the centre location was averaged. In addition to evaluating the global accuracy of the tree locations (for applicable devices), the precision of the laser scanning systems was evaluated by automatically registering the tree maps coarsely to the reference, and refining the fit by minimizing the squared distances between the matches.
Results: precision vs accuracy
The under-canopy systems provided better than 15cm root mean square error (RMSE) precision laterally and vertically. This was considered a good result for long and linear measurements in challenging environments devoid of stable and well-defined surfaces (such as walls) that are typically used for SLAM algorithms. However, the global accuracy was found to be lacking. The only system capable of georeferencing itself throughout the full course had a shift of several metres, both horizontally and vertically, due to the forest canopy obstructing the GNSS signal.
The under-canopy laser scanner systems had similar levels of precision, and each was sufficient to uniquely identify each tree Therefore, the researchers concluded that professionals should concentrate on the quality of the extracted tree attributes and suitability of the platform (drone, handheld, ground vehicle, etc.) for the intended use when selecting an under-canopy laser scanner for forest inventory reference.
ALS as a future positioning reference?
The ALS measured the tree locations with accuracy and precision of 6cm horizontally and better than 10cm vertically. The accuracy was high enough that the researchers were unable to tell whether the remaining error was due to the ALS or the reference. In fact, they decided it was likely that the larger vertical error was caused by a bias in the reference. Whereas manual measurements are prone to systematic error, a novel method was used to systematically
About the authors
Jesse Muhojoki is a researcher in the Autonomous Mapping and Driving research group at Finnish Geospatial Research Institute FGI. His main research interest is detecting trees and their attributes from closerange laser scanning data.
Antero Kukko is a research professor and leads the Autonomous Mapping and Driving research group at Finnish Geospatial Research Institute FGI. His experience and interests include development and use of mobile and airborne multispectral laser scanning systems, autonomous perception for forest machines and autonomous driving.
Juha Hyyppä is head of department and research professor at Finnish Geospatial Research Institute FGI. His interests include point cloud intelligence and AI data processing of drone, backpack and other mobile laser scanning platforms for forestry and corridor environments.
determine the ground level from point distribution around the trunk. The high accuracy of the ALS makes it an excellent positioning reference for a large-scale forest inventory because it collects data significantly faster than manual or terrestrial laser scanning (TLS) measurements.
In the study, ALS identified approximately 80% of the reference trees in the boreal forest. This is sufficient for most use cases, but can be further improved. The limiting factor was the tree extraction algorithm and not the quality of the ALS data, as all of the undetected trees were visible in the point clouds. When a more complete and detailed
Figure 2: An airborne laser scanning system can provide accurate tree locations in a forest from a large area quickly with only a moderate reduction in completeness.
Further reading
Muhojoki, J.; Hakala, T.; Kukko, A.; Kaartinen, H.; Hyyppä, J. Comparing positioning accuracy of mobile laser scanning systems under a forest canopy. Sci. Remote Sens. 2024, 9, 100121. doi: 10.1016/j.srs.2024.100121
Hyyppä, E.; Muhojoki, J.; Yu, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J. Efficient coarse registration method using translation-and rotation-invariant local descriptors towards fully automated forest inventory. ISPRS Open J. Photogramm. Remote Sens. 2021, 2, 100007. doi: 10.1016/j.ophoto.2021.100007
Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyörälä, J.; Yu, X.; Wang, Y.; Virtanen, J.P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60. doi: 10.1016/j.isprsjprs.2020.03.021
tree map is required, the ALS can be supplemented with MLS data. The high precision of the MLS data allows the extracted tree location to be registered to the ALS reference tree map, providing better completeness of the tree map (90-100%) as well as more detailed data about the tree trunk, branches and leaves for sophisticated forest analysis. In the future, drones flying missions both above and under the canopy could provide the best of both worlds.
Figure 3: Hovermap system flying in the forest.
Figure 4: Measuring the tree map with the ZEB Horizon.
A guide to deploying drones to navigate, map and explore terrains independently
From mystery to mastery: understanding autonomous exploration with UAVs
By Bashar Alsadik and Francesco Nex, University of Twente, the Netherlands
When it comes to developing UAV autonomy, simultaneous localization and mapping (SLAM), autonomous path planning and next best view (NBV) are all central algorithms. This article explains these techniques individually and also their interrelationships, highlighting the critical role each one plays in achieving full autonomy in drone operations, which is important for many researchers and practitioners. The resulting clarity on the functions and interconnections of SLAM, path planning and NBV will help to fill existing knowledge gaps, while also showing the potential of integrating these techniques to drive future advances in autonomous surveying and mapping systems.
With the advent of high-tech sensor setups and intelligent algorithm systems, autonomous navigation and decisionmaking are transforming the landscape of autonomous uncrewed aerial vehicles (UAVs). Next-generation UAVs are expected to work efficiently in complex environments and make real-time decisions without human intervention. The ability of UAVs to navigate, map and explore terrains autonomously offers great potential in various applications, including infrastructure inspection and disaster response.
Current examples of autonomous UAVs for infrastructure inspection
The autonomous UAV technology under development is currently running at between Levels 3 and 4: conditional and partial autonomy. In the context of infrastructure inspection, this gives rise to the following examples:
• Bridge inspection with a Level 3 UAV: Before deploying the UAV, the operator sets specific waypoints along the bridge’s structure where the UAV is required to collect data. The UAV autonomously navigates between these waypoints, maintaining stable positioning using
SLAM in GNSS-denied environments (e.g. underneath the bridge) and detecting basic obstacles like cables or beams. If the UAV encounters complex or unexpected obstacles, such as dense scaffolding or intricate geometry, the operator may need to manually adjust the UAV’s path.
• Underground mine inspection with a Level 4 UAV: Mine tunnels are known to be a complex environment, with tight passages of varying heights and visibility, and no accessible GNSS signal. The UAV performs Lidar-based SLAM and autonomously navigates through the mine, building a three-dimensional map in real time as it progresses. The UAV avoids any encountered obstacles, such as walls, equipment and unstable structures, and adjusts its flight path accordingly. The UAV uses pre-flight input to fully autonomously search the tunnels and acquire information for later analysis, including points that are hazardous or inaccessible to humans.
The step to full autonomy
So how can UAV autonomy progress to Level 5? To operate fully autonomously, UAVs must not only navigate safely, but
must also simultaneously determine an optimum exploration and data collection strategy. This requires the integration of multiple decision-making algorithms –namely SLAM, path planning and NBV methods – into one consistent operation to guarantee efficiency and adaptability in the unknown environment. These three techniques are explained in more detail below.
Simultaneous localization and mapping (SLAM)
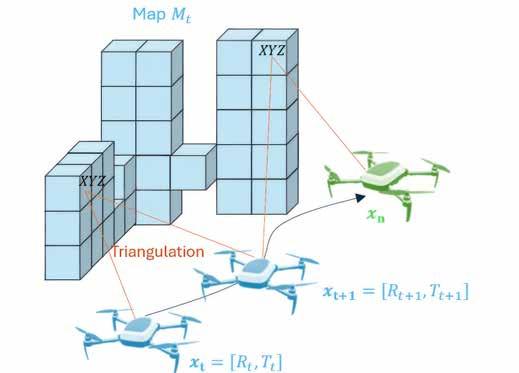
SLAM has emerged as a critical technology in robotics, and can also be applied for UAVs operating in environments where GNSS signals are weak or unavailable. SLAM enables the UAV to build a real-time map of its surroundings while simultaneously determining its position within that map. In essence, SLAM is similar to structure from motion (SfM), but it operates in real time and continuously updates the map and UAV’s pose as new observations are made. Accordingly, SLAM provides two key outputs of the UAV’s pose Xt (localization = Rotation R + Position T) at time t together with the mapping function, which is the 3D representation of the environment based on the observations gathered up to time t
Accordingly:
Xt={x1,x2,….,xt }, the robot’s poses over time t where xt=(Rt,Tt )
Mt={m1,m2,….,mt }, the map of the environment created by SLAM up to time t
The SLAM algorithm should update the pose and map at each time step t:
Mt =f(Xt,Ot)
where f is the mapping function that reconstructs the environment based on the observations Ot, which are collected from sensors like RGB cameras, Lidar or depth cameras at the time t
In UAV-based inspection systems, visual SLAM (vSLAM) – which uses camera images to build these maps – is widely employed. This is critical when UAVs are tasked with inspecting parts of structures that are not visible or accessible to ground-based cameras. The ability to autonomously navigate and progressively build the 3D environment makes SLAM crucial for ensuring the effectiveness of UAV-based inspections. It is worth mentioning that when the UAV is equipped with an inertial measurement unit (IMU), then a fusion can be made in what is called visual inertial SLAM (Figure 1).
The conventional visual SLAM algorithm consists of several sequential steps, as follows:
1) Feature extraction: The objective is to extract meaningful visual features from the environment, such as corners, edges, or textures, that can be tracked across frames. These features are used to understand the relative motion of the camera and to map the environment.
2) Visual odometry: The objective is to estimate the camera’s motion between consecutive frames by tracking how the extracted features have moved over time. Camera motion is defined as a 6DOF pose (3D position T and orientation R) based on the relative displacement of features between frames.
3) Local mapping: The objective is to create a local map of the
environment by projecting 2D visual features into 3D space, allowing the UAV to build a temporary map of its surroundings. This is done by applying a triangulation algorithm to calculate the 3D coordinates of feature points from their projections in two or more camera views. Monocular or stereo vision is then used to compute the depth of dense features.
4) Local optimization: This step ensures the local map is consistent over time by aligning consecutive frames and minimizing error accumulation. Normally, this is applied using bundle adjustment, which is a non-linear optimization technique that minimizes reprojection errors by adjusting both the camera poses and the 3D positions of the tracked features.
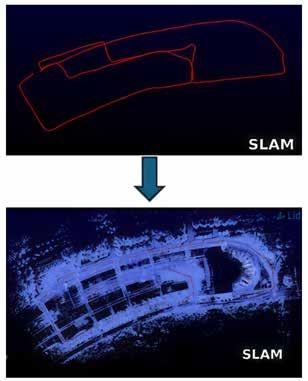
5) Loop closure detection: This step is important to detect when the UAV revisits a previously explored area, and it helps to correct accumulated drift in the estimated trajectory and map. Two common methods of loop closure are bag-of-words or fast library for approximate nearest neighbours (FLANN) (see Figure 2).
6) Global optimization: The objective is to perform a global adjustment of the entire map by optimizing the positions of all the camera poses and landmarks after a loop closure has been detected. This can also be applied using the bundle adjustment method. Another important method is pose graph optimization, whereby each node represents a camera pose and edges between nodes represent relative transformations. After loop closure, the entire graph is optimized to ensure consistency.
The above steps describe the workflow of traditional vSLAM methods, which rely on widely used and well-established feature extraction and geometric computations. However, it is important to note that current deep learning-based vSLAM approaches follow a different paradigm.
Path planning
Efficient path planning is one of the biggest hurdles in using UAVs for infrastructure inspection. For UAVs to navigate complex environments, they must be able to generate optimal routes to inspect target structures autonomously. Path planning involves guiding the UAV from its starting position to the target points while avoiding obstacles and ensuring that the inspection covers all critical areas of the infrastructure. Moreover, battery life is a significant
Figure 1: The visual simultaneous localization and mapping (vSLAM) concept.
Figure 2: Loop closure in SLAM.
constraint when inspecting large-scale structures such as bridges or high-rise buildings. Efficient path planning algorithms must optimize the route to minimize power consumption while ensuring that all areas are properly inspected. This planning task is especially challenging in GNSS-denied environments such as the underside of bridges, tunnels or indoor facilities, where traditional GNSS systems are unreliable.
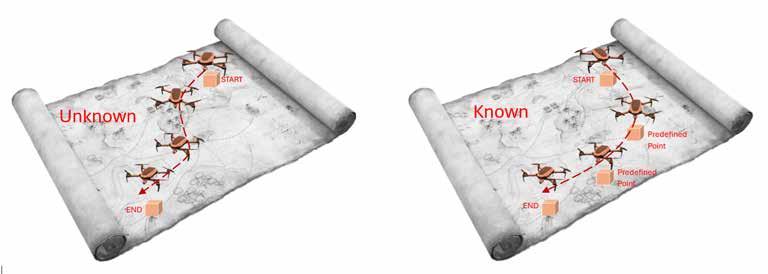
When multiple targets must be visited, traditional methods of path planning, like the travelling salesman problem (TSP), have long been used in robotics and UAV navigation to optimize the route. The TSP method focuses on finding the shortest possible route that visits a set of locations once and returns to the original point while minimizing travel time and energy consumption. In the context of UAV-based infrastructure inspection, TSP can be applied to determine the optimal order in which the UAV should visit multiple points on a structure (e.g. several inspection targets on a bridge) to ensure minimal flight distance (Figure 3).
While TSP is effective for small-scale, well-defined environments, it becomes computationally challenging for larger, more complex environments with many points of interest. The TSP is NP-hard, meaning that as the number of target points increases, the computation time required to find the optimal solution grows exponentially. Additionally, while TSP provides a solid basis for path optimization, it assumes that the environment is fully known and static, which is often not the case in real-world UAV operations.
Genetic algorithms, simulated annealing and ant colony optimization methods are just a few valid examples of how the issues with
TSP can be solved. For unknown dynamic environments, path planning techniques like A* and RRT are focused on real-time navigation and pathfinding in a possible integration with SLAM. They solve the problem of how to reach a goal or traverse complex environments, taking obstacles and efficiency into account. They are used to navigate the shortest path autonomously between start and target points.
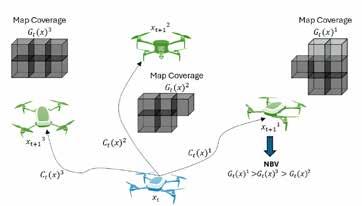
Next best view (NBV)
Modern UAV inspections require systems that can handle dynamic, uncertain or GNSS-denied environments, where new information about the environment is continuously gathered. This is where SLAM and next best view (NBV) planning come into play. NBV is concerned with active exploration and data acquisition (active mapping). It doesn’t plan the shortest or most feasible path, but instead directs the UAV to the most informative position based on current data (e.g. to achieve better 3D mapping or a detailed inspection of an area).
By calculating the most valuable next location for a UAV equipped with a camera or Lidar, NBV algorithms ensure that the UAV captures reliable data, maximizing the coverage of the scanned object while maintaining the predefined accuracy and resolution of the inspection. Consequently, the NBV output is mostly designed to find the optimal next viewpoint to maximize the information gain or coverage of the scene (Figure 4). It takes the current map and observations, and predicts the best camera pose for the next step:
Gt(x)= The information gain for a potential next viewpoint x
Ct(x)=The cost of moving the UAV to the potential next viewpoint x
The NBV objective is to find the viewpoint xt+1 that maximizes the information gain while minimizing the cost of movement. Mathematically this can be formulated as: xt+1=arg max (Gt(x)-Ct(x))
Prospects for integrated autonomous UAV operations
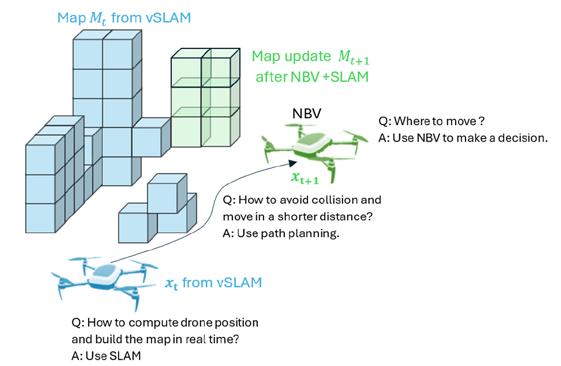
When a UAV is deployed with a high-level mission objective such as inspecting a wind turbine or a bridge, depending on prior knowledge of the environment it may either initialize with a partial map or, in fully unknown terrain, rely on SLAM to generate real-time maps. Then, an intelligent workflow emerges by combining localization, navigation and viewpoint optimization to ensure complete and efficient coverage of the target structure. An autonomous workflow (Figure 5) can be achieved based on the following steps:
1) SLAM for initial mapping: When first activated, the drone uses SLAM to build a real-time 3D map of its surroundings. This provides the drone with self-localization while recognizing obstacles or areas for specific inspection (areas of interest). The SLAM data continually relays the position of obstacles or landmarks, providing continuous input into both path planning and NBV decisions. Drones may also
Figure 4: The next best view (NBV) concept.
Figure 3a: Path planning in an unknown environment (no predefined path points to visit).
Figure 3b: Path planning in a known environment (TSP).
utilize other collision avoidance technologies – such as ultrasonic sensors or other specialized tools – to enhance obstacle detection and ensure safe navigation.
2) Path planning for efficient navigation: The drone uses a path planning algorithm like A* to calculate an initial collision-free path from its current position to a predefined inspection target or destination. Accordingly, the drone avoids obstacles and determines the shortest or most feasible path considering environmental constraints or obstacles. The algorithm continuously updates the path in real time as the drone moves through the environment. As a result, the drone avoids new obstacles whenever detected from the point clouds created using SLAM and ensures the drone doesn’t collide with obstacles.
3) Next best view (NBV) for data acquisition: Once the drone reaches a certain location (based on the path planned), NBV comes into play. NBV evaluates the current map and inspection data (e.g. object coverage or areas requiring further inspection) to determine the most informative next position. NBV maximizes the information gained by selecting a viewpoint that can provide the most useful data for the mission. For example, if the drone detects cracks in one section of a structure (e.g. a bridge or turbine), the NBV algorithm will prioritize moving to a position that provides a better view of those cracks or other areas needing inspection.
4) Combining NBV and SLAM for optimal positioning: After the NBV algorithm has selected the most informative next viewpoint, a new path is calculated to move the drone to that location. The drone follows this new path while continuing to map its environment using SLAM and adjusting for obstacles to dynamically update the path as necessary. The NBV algorithm continuously assesses whether the current view is sufficient or if the drone should be repositioned for better data collection. This cycle repeats iteratively until the inspection task is complete, ensuring efficient data collection while adapting to the environment.
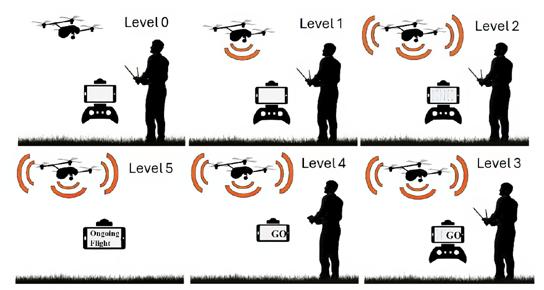
Levels of UAV autonomy
‘Autonomy’ refers to the ability to make decisions and operate without human intervention. In UAV operations, the levels of autonomy – ranging from Level 0 (no autonomy) to Level 5 (full autonomy) – highlight the progression from manual control to the system navigating and collecting data with minimal to no human involvement (see Figure 6).
Autonomous capabilities of UAVs are classified according to these levels:
• Level 0 (basic assistance): The UAV requires 100% manual control by the pilot for path planning and navigation. There is no automated system for decision-making. The UAV cannot adjust its route based on any environmental feedback.
• Level 1 (advanced assistance): The UAV provides some assistance with automated landing and/or return to home in open space, but still relies heavily on pilot input for navigation. Basic assistance from the UAV sensors – such as sensing obstacles – may begin at this level, but no autonomous path planning is performed.
• Level 2 (partial automation): The system has basic obstacle avoidance and the drone can reliably execute planned grid flights with little or no operator input. The operator may set waypoints or objectives.
• Level 3 (conditional autonomy): The UAV is able to fly autonomously under certain conditions, such as open environments with few obstacles. While it can respond to obstacles, operator intervention may be required in more complex scenarios. Specific path-planning algorithms may be employed for autonomously planning paths, as well as for the active adjustment of paths in real time. The system operates based on a number of pre-set decisions, leaving the pilot only as an emergency override.
• Level 4 (partial autonomy): More sophisticated systems are capable of flying fully autonomously in increasingly complex conditions, such as congested urban environments or GNSS-denied areas. The UAV pilot provides mission intent and parameters. The UAV is capable of autonomous path planning with dynamic obstacle avoidance. These UAVs adapt their path-making decisions based on real-time environmental data.
• Level 5 (full autonomy): The UAV can fly in any environment with the ability to respond dynamically to obstacles and make high-level decisions about its mission. Fully autonomous path planning enables it to navigate and localize in real time in any environment, even in obstacle-filled areas or GNSS-denied conditions, ensuring continuous mapping and navigation.
Figure 5: The three basic algorithms in autonomous UAV mapping.
Rapid technological developments have placed autonomous UAVs as effective devices for various applications
About the authors
Bashar Alsadik is an assistant professor at the ITC faculty of the University of Twente in the Netherlands. His main research interests are in photogrammetry and geomatics, with a focus on autonomous mapping systems. He has worked in the academic and industrial sectors for more than 25 years. He is a member of the ITC UAV Centre.
Francesco Nex is an adjunct professor in the Earth Observation Science (EOS) department at the University of Twente in the Netherlands. His main research interests are focused on the development of innovative solutions fusing elements from photogrammetry, deep learning and adjacent domains such as robotics to promote the application of UAV imagery in a variety of real-world remote sensing and geomatics applications. He is the lead of the ITC UAV Centre.
5) Post-inspection and data analysis: Once all target areas have been inspected, the drone can use path planning algorithms to return to the home position, or the operator can analyse the gathered data as the basis for further decisions. During this final stage, NBV might still play a role in deciding whether additional viewpoints are required before ending the mission.
What happens if one of these key techniques is missing?
The interaction between SLAM, path planning and NBV is crucial for advanced autonomous UAV navigation. Without the involvement of all of these components, the drone’s efficiency, safety and ability to gather meaningful data are significantly compromised. For example:
• Without SLAM: The drone would not be able to localize itself and would lose track of its position over time in GNSS-denied environment. The map of the environment will either not exist or be unreliable. This would make NBV-based exploration ineffective, especially in dynamic or large-scale environments.
• Without path planning: The drone would fly between viewpoints inefficiently, increasing the risk of wasting time and battery life. Due to collisions, obstacles and safety violations, the autonomous system would be less robust.
• Without NBV: The drone would not be able to optimize its viewpoints for exploring the environment, leading to random or inefficient coverage of the objects. This would increase the chance of needing repeated flights during exploration or of the drone getting stuck in one region due to inefficient exploration.
Conclusion
The current traditional techniques for mapping and infrastructure inspection require labour-intensive and often hazardous manual work. The rapid technological developments have placed autonomous UAVs as effective devices for various applications, making such processes much faster and safer. Existing equipment is gradually being replaced by autonomous UAV systems with complex SLAM, path planning and NBV algorithms. This article has highlighted the critical role each technique plays in achieving efficient autonomous UAV exploration.
Although these techniques allow UAVs to operate autonomously and create maps of their surroundings or inspect complex environments, even in the absence of GNSS signals, full commercial deployment is still limited. Except for a few systems, most autonomous UAV solutions with advanced onboard processing are still under development or restricted to specific applications. Thanks to continuous research and innovation, however, this capability is coming one step closer to implementation.
Figure 6: In UAV operations, the levels of autonomy highlight the progression from manual control to full autonomy.
The indispensable role of point cloud data in rebuilding Notre Dame
Over five years after the devastating fire, the world-famous Notre Dame cathedral in Paris has reopened its doors. A cloud of one billion points was fundamental to enabling a full-blown digital recreation of the historical landmark’s interior and exterior. The data proved indispensable in the restoration project, which based on the first glimpse of the interior has been a resounding success.
On 15 April 2019, the Notre Dame went up in flames. The world watched in horror as the cathedral blazed for hours. A significant part of the cathedral was lost in the fire; the spire collapsed and the roof was destroyed. The subsequent years have been spent on the mammoth task of rebuilding Notre Dame. The spire has been rebuilt and the stained glass and woodwork have been restored. The work was financed entirely by donations from around the world. The total cost: around €700 million.
Terrestrial laser scanning
Following such disasters, terrestrial laser scanning (TLS) surveys allow accurate
assessment of the damage, structural stability and required restoration work, but they cannot provide information about the pre-disaster state. However, in a stroke of luck in the case of Notre Dame, Prof Andrew Tallon – an architectural historian from Vassar College in the USA – had captured the entire cathedral using a terrestrial laser scanner in 2010.
His project was aimed at fully understanding the nature of the Gothic structure and identifying any structural anomalies. Laser scanning enabled Tallon to create a precise 3D model of Notre Dame, translating point clouds into detailed representations of its
buttresses, ribbed vaults, stained glass, ornate carvings and other architectural details.
That accurate and detailed point cloud turned out to be of tremendous help in faithfully reconstructing Notre Dame in its original state. In fact, Tallon’s laser scans were the only really accurate as-built measurements of the cathedral.
The value of point cloud data
While modern restoration efforts can’t fully replicate the artistry of centuries past, Tallon’s scans provided an invaluable guide for the craftspeople involved, allowing them to come remarkably close. Although Tallon unfortunately passed away in 2018, his groundbreaking work remained a vital resource for restoring the iconic cathedral.
The answer to the question that arose after the devastating fire – “How could this historic cathedral, which had weathered centuries of challenges, ever reclaim its former glory?” –didn’t lie in ancient blueprints, but in the use of innovative digital technology: terrestrial laser scanning. This illustrates the urgent need for accurate and detailed 3D models of cultural heritage sites, before disaster strikes or the natural elements erode their splendour.
Andrew Tallon’s precise and comprehensive point cloud proved invaluable in the faithful reconstruction of Notre Dame to its original state. (Image: Andrew Tallon/Vassar College)
An insight into terminology and practices
Airborne Lidar and photogrammetric accuracy
By Huibert-Jan Lekkerkerk, technical editor, GIM International
Over the years, many articles on airborne Lidar and photogrammetric surveys have been published in GIM International. As technical editor, one standard question I ask the authors is ‘What was the accuracy?’. The responses vary not only in value, but also in how accuracy is quoted. The definition of accuracy is not only relevant to articles but also in contract specifications. This article gives an overview of terminology and methods, using the ASPRS and IHO specifications as a basis.
Many people (and contract specifications) use the term ‘accuracy’ without fully defining it. In statistics, the term ‘accuracy’ is not well defined and could indicate different things to different people. In statistics terminology, it is based around three main types of errors: systematic errors, random errors and blunders. Blunders (sometimes also called ‘spikes’) are errors so large and/or obvious that they are usually removed from the dataset before further statistical processing and thus not relevant to specifications.
Systematic error or bias
The systematic error or bias is an error that follows a certain rule. When the rule is known, the error can be removed. The geodetics are an important systematic error in all surveys. Incorrect geodetic parameters will lead to a shift of all the coordinates surveyed. The survey may still look correct
between objects, but is in fact completely in the wrong place. Once we figure out the size (rule) of a systematic error, the results can be corrected.
Many specifications consider the systematic error to be ‘near zero’ after careful calibration and installation. However, no matter how well the installation and calibration were performed, a small residual error usually remains. Such residual errors can be found in small offset errors between, for example, GNSS and sensor, but also in the boresight calibration for Lidar, the inertial measurement unit (IMU) alignment or the camera parameters in photogrammetry.
Random error
The random error is usually stated as the error which remains after all blunders and
systematic errors have been removed. A random error is mainly influenced by the environment and instruments. The GNSS is a good example of this. Due to satellite movement, atmospheric conditions and receiver electronics, each position will deviate to a certain amount from the true, average, value.
In surveying, we often consider the random error to be ‘normally distributed’. This effectively means that the error follows a pattern which only seems random over a short amount of time. If we take enough measurements, we should find that the
average of all measurements is equal (or very close) to the true position, provided there are no systematic errors present (and all blunders have been removed). Another important aspect of the normal distribution is that we can predict how far the errors will deviate from this average. This is called the ‘uncertainty’ of the measurement and is generally stated in terms of the standard deviation (or sigma, σ) of the measurements.
In the normal distribution, this uncertainty relates to how many measurements are within a certain distance of the average. Take for example an RTK dGNSS system with a standard deviation of 10mm + 1ppm. The definition of this random error indicates that there is a fixed error (10mm) and one that is distance-dependent (parts per million [ppm] or mm/km). At 10km from the base station, this computes to 10 + 1 x 10 = 20mm. The normal distribution now tells us that we may find (rounded) that 68% of all our measurements are within one standard deviation or 20mm from the average, and that 95% (rounded) of our measurements are within two standard deviations or 40mm from the average. 95% is also called the ‘confidence level’ as it indicates how many of our measurements are within this value of two standard deviations from the average.
Root mean square error
In the real world, it is almost impossible to measure the true average – not only due to small residual errors, but also because the true average (real position) is also measured and thus not precisely known. Therefore, many specifications use a term like root
mean square error (RMSE). This is effectively a combination of the (unknown) systematic error or bias and the (unknown) standard deviation as found in a real survey, when the results are compared to independent ground control points (GCPs) for example. RMSE is comparable to the standard deviation, and would even be the same if there would be no bias in the measurements. However, as both the GCP and the measurements have their own (residual) error, the RMSE is generally slightly more pessimistic than the standard deviation itself. The RMSE (after removal of blunders) is usually what is meant by ‘accuracy’ in a specification.
The RMSE indicates 68% of the measurements as it is based on the one standard deviation (sigma) level. Vertical accuracy is quoted as a 2RMSE value by the 2014 Positional Accuracy Standards for Digital Geospatial Data of the American Society for Photogrammetry and Remote Sensing (ASPRS), so at a 95% confidence level. For Lidar bathymetry, which follows the standards of the International Hydrographic Organization (IHO) (namely its S-44 Standards for Hydrographic Surveys), the term ‘total vertical uncertainty’ (TVU) is equivalent to the 2RMSE value.
Positional accuracy
Whereas the vertical accuracy is a one-dimensional number, positional accuracy consists of two dimensions: longitude / X / E and latitude / Y / N. An RMSE could be quoted for both dimensions, but most clients are more interested in ‘how far’ the measured point is from the real coordinate. This distance between the true and
Figure 3: A-priori computation in AMUST software for multibeam echosounder against IHO S44 Special Order.
measured position is the distance root mean square (DRMS). The DRMS can be computed from the standard deviations in both horizontal directions and indicates a circle within which the real-world position should fall. The confidence level for the DRMS differs from the RMS(E) value in that 1DRMS represents a 63-68% confidence level (or around 66% on average) and 2DRMS indicates 95-98% confidence. Standards differ in how they approach positional accuracy, with ASPRS using a 2RMSE value for the X and Y directions separately as well as a ‘range’ 2RMSEr equivalent to 2DRMS,
Figure 4: Top: Coastal bathymetry of St. Thomas, US Virgin Islands, mapped using Lidar and presented in false colour (purple indicating deep areas, orange indicating shallow). Land areas are shown with satellite imagery. Left: Highaltitude topobathymetric Lidar data collected by Woolpert. Right: Illustration of how multisensor data is efficiently collected with real-time quality control. (Image courtesy, respectively: USGS, Woolpert/USACE/JALBTCX, and Teledyne Geospatial)
while the IHO uses the term ‘total horizontal uncertainty’ (THU) which effectively is a 2DRMS value. The confidence levels are not identical to a single RMSE but could be considered similar enough for practical purposes.
Accuracy in specifications
With accuracy defined, we now need to turn to specifications. As stated, both the IHO and the ASPRS have standards which are applicable to Lidar (both) and photogrammetric (ASPRS) surveys. The IHO works with ‘orders’ of accuracy for safety of
navigation surveys and has a selection matrix that can be used to create specifications for all other types of surveys. The ASPRS defines ‘classes’ of accuracy in a similar way but distinguishes between vegetated and nonvegetated land. The latter is of course less of an issue under water.
Both standards focus on the random error component. The IHO states that systematic error should be minimized but does not quote a number. The ASPRS standards advise the user to limit systematic error to 25% of the overall 2RMSE values.
Ultimately, the accuracy of a survey can only be determined after the survey data is processed
About the author
Huibert-Jan Lekkerkerk is technical editor of both GIM International and Hydro International, freelance hydrographic consultant and author of multiple other publications on GNSS and hydrography. He is also principal lecturer in Hydrography at Skilltrade (Cat B) and the MIWB (Cat A). Besides lecturing, he is a PD candidate at the MIWB.
A-priori uncertainty
Ultimately, the accuracy of a survey can only be determined after the survey data is processed. However, it is unwise to embark on a survey if it can be predicted that the required accuracy cannot be met with the intended survey design and sensors. The test whether a chosen configuration will meet the requirements using the survey design is called the ‘a-priori uncertainty estimation’ or simulation.
The tools to compute this uncertainty are relatively limited. The ASPRS includes a simple mathematical model in its specification, but this is limited to positional accuracy and only contains a few parameters. Based on an internet search, there is some software available, albeit more for planning than for a-priori uncertainty estimates. Similarly, for bathymetric surveys, there are some software packages for a-priori computation for multibeam echosounders, but these do not include bathymetric Lidar. A-priori models for photogrammetric surveys have not been found.
A-posteriori accuracy
While a-priori estimates are scarce, accuracy determination after the survey is commonplace for Lidar and photogrammetry. All major software vendors include statistical tools which give a variety of statistical parameters including computed accuracy. What is important to realize is that most parameters relate to the so-called ‘internal’ reliability or relative accuracy of the results. That is, they describe how measurements are related to other measurements in
the same survey. They generally do not represent systematic errors (which are part of the external reliability or absolute accuracy) very well.
External reliability, including systematic errors, can be tested by having independent (extra) testing points. These are like GCPs but should not be part of the original adjustment of the data like regular GCPs. They should preferably be measured using an independent and different technique. This also means that they should not be based on corrections from the same (RTK) base station but should, for example, be derived from RINEX data processing or land survey techniques. Ideally, some of these test points are supplied by the client as part of the specification. This is to prevent systematic errors in, for example, a base station setup to propagate in both the control as well as the original measurements. The combination of internal and external reliability can demonstrate the RMSE (or THU/TVU) values for the overall survey accuracy.
Conclusion
Accuracy is not very well defined. Using terminology like systematic error and random error or RMS(E) makes it clearer what is meant. A measurement can only be called accurate if the requirements for systematic error and random error have been met. The final results should include tests for internal and external reliability of the data. To prevent survey results that do not meet the specifications, an a-priori uncertainty estimation can be performed.
Figure 5: IHO S44 bathymetric orders, also applicable to Lidar bathymetry.
Finland uses self-driving cars to collect geospatial data
As autonomous vehicles become more prevalent, the geospatial data they collect plays a vital role in addressing urban challenges. The Finnish Geospatial Research Institute’s self-driving car continuously maps its surroundings, capturing high-precision data on road conditions, urban vegetation as carbon sinks, and flood risk factors. This rich dataset provides valuable insights for city planning, environmental monitoring and infrastructure management.
Cities need to prepare for flooded streets, harsh weather conditions and deteriorating roads. Accurate data is needed in planning, as collected by the self-driving car of the Finnish Geospatial Research Institute (FGI) of the National Land Survey of Finland (NLS) in Espoo and Helsinki. Its high-precision sensors gather vast amounts of data from the surrounding environment during every drive, offering great potential for capturing geospatial data to improve urban resilience and infrastructure management.
The Self-driving Cars and Future Data (Big Data) project led by FGI is studying the various purposes for which the data collected by a self-driving car could be used.
The project is carried out in cooperation with Aalto University’s Research Institute of Measuring and Modeling for the Built Environment (MeMo) – and with support provided by the European Regional Development Fund (ERDF). There are so many application possibilities that not all of them are yet known. The Big Data project studies the theme using case examples.
“We use an autonomous car to collect data on the environment. The collected data has many different uses. Now we are studying the type of data that can be obtained regarding the condition of ruts, roadside trees and carbon sinks in trees,” explained Professor Juha Hyyppä from FGI.
Few self-driving cars operate in Finland, but FGI researchers have developed ARVO, the Big Data project’s autonomous research vehicle. Equipped with state-of-the-art sensors, it serves as a mobile research lab. (Image courtesy: National Land Survey of Finland)
Collecting geospatial data to benefit cities
There are not many self-driving cars in Finland. The Autonomous Research Vehicle Observatory (ARVO), the Big Data project’s self-driving research vehicle, has been developed by FGI’s researchers. Its state-ofthe-art sensors observe the environment, making it a mobile research laboratory.
In the future, autonomous or self-driving transport is expected to grow. This also offers the opportunity to have all the selfdriving cars of the future collect data from the environment while driving. However, new legislation is required to guide companies to share the data collected by autonomous vehicles for the benefit of companies and society.
“Cities could use the data collected by selfdriving vehicles to meet their various needs. To succeed in this, cities must be able to take into account the format in which data is collected and how the data is processed,” Juha Hyyppä added.
Researchers at FGI help municipalities with the basics of autonomous vehicle data so that they can get the most out of the data. An extra dimension is that the geospatial data collected by self-driving cars also offer opportunities for startups. Companies are assisted by the EU project called Location Innovation Hub, which guides companies in the development of business based on geospatial data.
Shaping the integration of reality capture and digital twins
AI’s role in geospatial innovation
By Christine Byrne, Looq AI
Although recent innovations have taken on a more visible profile, with buzzwords like AI making headlines, advances in the geospatial sector have historically progressed rapidly yet quietly, as a technological continuum. This article looks at how today’s breakthroughs are delivering practical, impactful applications – without the glitz.
Despite the rise of automation, geospatial practitioners remain indispensable. These experts master emerging technologies while upholding the fundamentals of precision, accuracy, compliance and legality amid the ongoing digital transformation. Surveyors are at the forefront of this evolution, playing a pivotal role in infrastructure projects. As the backbone of construction, utilities and urban development, surveyors are leveraging cutting-edge technologies to enhance precision, boost efficiency and deliver actionable insights. These
advancements are reshaping infrastructure management and fostering collaboration across disciplines, bridging gaps between traditional surveying, GIS and engineering practices.
Transformative tech and transforming technicians
The global geospatial analytics market is projected to grow from US$78.5 billion in 2023 to US$141.9 billion by 2028 (source: Markets and Markets). Key drivers include increasing demand for location intelligence
across various industries, supported by access to geospatial data from satellites, sensors and mobile devices. Remote sensing is expected to dominate the technology segment, while cloud deployment will lead the market due to its scalability and data processing capabilities. With the integration of artificial intelligence (AI), the market is also experiencing rapid growth, unlocking the potential to boost operational efficiency by up to 30% in sectors like energy, utilities, urban planning and transportation. The future is clear: geospatial analytics is transforming industries and driving innovation at an unprecedented pace.
“We are in the midst of a geospatial revolution, often referred to as Geospatial 2.0,” notes Matt Sheehan, geospatial growth specialist. “Technological advances like AI and new data collection methods have unlocked unprecedented insights and elevated decision-making capabilities. These breakthroughs are bridging the onceseparate fields of geospatial and surveying. As we embrace the era of digital twins, surveyors play a critical role in delivering the precise base data needed to construct these 3D digital models, while geospatial professionals integrate and analyse this data to provide answers to questions that were once incredibly challenging.”
The integration of AI into geospatial workflows, including machine learning (ML) for Lidar point cloud processing, is enhancing the capabilities of traditional surveying and mapping technologies such as laser scanning, digital photogrammetry, mobile mapping and drones. These innovations have made reality capture more sophisticated and accurate than ever before.
Close-range photogrammetry (CRP), with a terrestrial hand-held unit, supported by sophisticated AI algorithms. This combination provides superior spatial resolution and rapid data processing. Enhanced visualization and analysis are facilitated in a web app environment. (Image courtesy: Looq AI)
Detailed maps like this one, capturing topographical features and existing infrastructure, enable optimal positioning of charging stations, effective drainage design, and integration of electrical systems while ensuring compliance with regulations. (Image courtesy: Looq AI)
For AI to deliver these efficiencies, however, it requires accurate, real-time data – data that skilled professionals must interpret to make informed decisions. This is where reality capture plays an essential role. Surveyors, who already possess the foundational skills required, are well-positioned to harness these advanced tools, particularly if they choose to upskill with new technologies.
AI and digital twins: redefining the landscape
AI’s role in geospatial workflows is rapidly advancing, particularly in automating labour-intensive tasks like data cleaning and analysis. This evolution allows surveyors to focus on strategic roles, such as quality control and compliance, while leveraging data-driven insights that were previously unattainable. Central to this transformation are digital twins – virtual models of physical assets that enable tracking, improvement and forecasting through data-driven insights.
Digital twins are invaluable in sectors like utilities, transportation and construction, where timely and accurate information is critical. In power grid management, for example, digital twins provide real-time insights into infrastructure health, helping to identify vulnerabilities and prioritize maintenance. As extreme weather events become more frequent, these tools are essential for maintaining reliability and safety.
Across infrastructure lifecycles – from planning and design to construction and operations – AI-enhanced 3D model processing and management are becoming
standard. Technologies like geospatial artificial intelligence (GeoAI), building information modelling (BIM), virtual design and construction (VDC), 4D construction, and iTwins are being adopted by firms of all sizes, including small and medium-sized enterprises.
Reality capture and digital twins: a powerful partnership
The realm of digital twins is becoming increasingly rich, both in terms of data and visually, with technologies like 3D tiles integrated into digital twins, enabling users to navigate and work within vast, detailed geospatial environments. For example, the addition of Cesium’s open platform to Bentley Systems’ iTwin technologies is enhancing these capabilities. However, the creation of these digital worlds depends on advanced reality capture.
Reality capture technologies – from drones to handheld devices – are integral to creating digital twins. These tools enable detailed, real-time visualization and actionable insights, transforming workflows in industries such as bridge maintenance and urban infrastructure. Combined with digital twins, reality capture provides a dynamic platform for simulation, planning and operational optimization.
As the global geospatial market expands, the importance of AI, digital twins and reality capture will continue to grow. Geospatial professionals must embrace these technologies, upskill in emerging tools and integrate AI-driven processes to meet
evolving industry demands. As Matthew Byrd, founder of Reality Capture Network, states, “Improving processes does not take jobs away – it shifts you to do more and better jobs.”
Overcoming technological barriers
Historically, building digital twins has been challenging. High-fidelity geometries required time-consuming methods and laser scanning – though scanning of sites is now much faster than even a few years ago. However, it can still be a costly proposition, as well as being logistically challenging, with many steps needed to integrate the data. Compounding the challenges is the need for ‘true’ digital twins, for instance in a construction environment, to be continuously updated. Many approaches had been tried in the past, but they did not live up to expectations. Advances in the underlying tech are now changing that.
Often, the conceptualized technological advances were not ready for prime time because the tech stacks were not yet mature. A decade ago, there was a wave of on-the-pole photogrammetry for field surveying – for instance, a multi-camera array that fit under a GNSS rover. It was a noble idea, but the tech wasn’t there yet. Many professionals became jaded by such tools and grew wary of trying new solutions.
It might be time to revisit some of these ideas, now that advances in agile photogrammetry and AI have streamlined these processes. Modern tools now deliver precise imagery-based point clouds comparable to laser scanning, but with greater efficiency and affordability. For instance, the integration of handheld photogrammetry with GNSS/inertial measurement unit (IMU) positioning automates data processing in the cloud, simplifying workflows and enhancing accuracy. Amanda Jones, PLS, owner of AJ Surveying, notes, “This technology is a game-changer, enabling us to capture large amounts of survey-grade data without extensive labour or drone operations.”
AI-driven computer-aided design (CAD) linework extraction plays a key role in accelerating the development of digital twins through various approaches. Autodesk demonstrates this with its capabilities in AutoCAD Civil 3D and InfraWorks, where
advanced tools enable users to process point cloud data into precise surface models and design-ready features. Similarly, AirWorks provides a solution for extracting CAD linework from orthomosaic imagery, offering surveyors the ability to upload stitched orthomosaic data from drones or other sources for the extraction of specific linework classes.
Additionally, AI is helping to seek out ‘dark data’ in infrastructure records. Data that is tied up in legacy or proprietary digital (or
About the author
Christine Byrne is the PR and communications director at Looq AI, a company known for its integrated hardware/software platform, which includes the Looq Q-Camera, automated cloud processing and a web-based application for visualization, analysis and collaboration. She holds a BSc in Marketing from Post University in Waterbury, Connecticut, USA, from where she graduated magna cum laude.
Once the captured data is uploaded to the cloud, a proprietary and fundamental image-to-model (photogrammetry) algorithm performs complex analysis to automatically construct a high-precision, sub-centimetre, georeferenced intelligent 3D digital twin, as well as 2D composite images from the field data. The artificial intelligence component of the algorithmic processing automatically segments the geometrically accurate model and extracts critical asset semantic and geometric features to enable engineering workflows. (Image courtesy of Looq AI)
analogue) systems that is not readily accessible or cross-referenced is effectively ‘dark’, but represents a hidden trove of useful data. For example, Phocaz developed a process to extract infrastructure features from massive archives of legacy CAD drawings (e.g. from state departments of transportation). The process uses an AIdriven virtual car that effectively ‘drives’ along CAD lanes in highway drawings to identify infrastructure features like guardrails, signs, channelization, lighting, etc. This gathered data can feed into a highway digital twin.
The evolving geospatial workforce
As demand for geospatial expertise grows, one of the challenges the industry faces is the shortage of trained professionals. The US Bureau of Labor Statistics projects 6% growth in surveying employment from 2023 to 2033. Additionally, nearly 50% of the current surveying workforce will retire over the next 10 to 15 years, creating a critical need for new talent to fill the gap. Educational institutions are responding by introducing specialized geospatial science and technology programmes to prepare the next generation of professionals.
Building a unified ecosystem
The geospatial industry’s future hinges on the seamless integration of AI, reality capture and digital twins. This transformation dismantles traditional silos between surveying, GIS and engineering, enhancing collaboration and efficiency. Surveyors remain central to this
ecosystem, delivering precise data that drives smarter decisionmaking in infrastructure projects. By embracing innovation and collaboration, geospatial professionals are poised to address global challenges like climate change, urbanization and resource management. The synergy of AI, reality capture and digital twins promises to revolutionize infrastructure management, reduce costs and foster sustainability – creating a smarter, more connected world.
Surveyors are more than essential to infrastructure; they are the architects of a sustainable future. Their expertise, paired with advancements in AI and digital twin technologies, is reshaping how we understand, manage and plan the built environment. Emerging innovations, such as quantum-enhanced geomatics sensors, signal even greater changes on the horizon. Amid these transformations, the geospatial sector will increasingly depend on surveyors to bridge the digital and physical realms. They will unlock new possibilities for infrastructure development, environmental stewardship and societal progress. As labour demands grow and technology advances, the role of the surveyor remains vital – leading the charge towards a more connected, efficient and resilient world.
Acknowledgements
The author sincerely thanks the subject matter experts for their valuable collaboration.
Mitigating GNSS disruptions as ionospheric disturbances move towards the peak
Signals, scintillation and the solar effect
By Stuart Riley, vice president of GNSS technology, Trimble
With the current solar cycle expected to reach its peak this year, the associated solar storms and ionospheric disturbances will increase the likelihood of fluctuating GNSS signals. This article explores how geospatial professionals can proactively plan and prepare for these effects in order to maintain operational resilience and minimize productivity disruptions.
The current Solar Cycle 25 is now in the middle of its 11-year cycle. This means it is expected to reach its maximum this year, with a continued chance of high activity through 2026. The effects are real: in many cases visually stunning (e.g. auroras in lower latitudes), in others potentially troublesome –particularly to those who rely on GNSS for precise positioning and navigation. For geospatial professionals, the increased risk of solar storms and ionospheric disturbances or scintillation equates to a
higher likelihood of rapid fluctuations in the strength and quality of GNSS signals. There is the potential for signal loss and complete outages, which needless to say directly affect positioning accuracy.
Thus far, the applications most affected by the current solar cycle include mining and agriculture in the equatorial regions and mining in northern Canada. However, during a large event, lower latitudes can see significant issues that range from
longer than normal initialization times to a complete loss of signal. For applications that require precision or semi- and fully autonomous operations, that loss can be highly disruptive. The solar event in May 2024 served as a clear reminder that solar disruptions can impact GNSS operations anywhere in the world, not just in the familiar equatorial and high-latitude regions. And events like this are likely just the beginning.
Figure 1: Effects of G5 geomagnetic storm on the Northern Alberta GNSS receiver in May 2024 (with purpose-built firmware deployed during Solar Cycle 25).
numbers including predictions.
(Image courtesy: Austrian Space Weather Office)
Inherently unpredictable
The Space Weather Prediction Center of the National Oceanic and Atmospheric Administration (NOAA) predicts that sunspot activity in the current cycle will be slightly below the recorded solar cycle average. Therefore, subsequent disruptions to GNSS signals on Earth should be relatively small. However, unpredictability is inherent to solar disturbances. Ionospheric scintillation, which is the rapid modification of radio waves in the ionosphere, extends from about 80 to 965km above Earth’s surface. As NOAA describes, it is caused by small-scale (tens of metres to tens of kilometres) structures in the ionospheric electron density along the signal path and is the result of interference of refracted and/or diffracted (scattered) waves
While scintillation is more prevalent at low and high latitudes, midlatitudes can experience scintillation during peak solar cycles. Severe scintillation conditions can prevent a GNSS receiver from locking on to the signal, making it very difficult to calculate a position.
For geospatial professionals who require centimetre accuracy and/ or continuous high-accuracy positioning, preparedness is essential to minimize productivity disruptions. This gives reason to take proactive steps and plan accordingly to ensure operations remain resilient in the face of the potential challenges posed by the solar cycle peak. Three critical steps can help them to manage solar effects: leverage the latest technological improvements, put backup strategies in place, and keep an eye on solar activity and near real-time predictions.
GNSS frequency independence
Since the exact timing of a solar disturbance is unpredictable, it can be very helpful to understand in advance the true capabilities of GNSS-enabled equipment to withstand the challenges of solar storms and ionospheric disturbances. Ionospheric mitigation features have been added and improved upon in GNSS receivers over the past three solar cycles. One such adjustment is frequency independence. A receiver that can draw on multiple independent satellite systems (e.g. GPS, GLONASS, Galileo, BeiDou) reduces the chance of errors from solar disturbances. Multi-signal processing allows the receiver to deweight or eliminate satellites that are affected by ionospheric disturbances or other error sources, and still have sufficient satellites for effective positioning accuracy.
Advanced algorithms
Additionally, sophisticated algorithms can play a crucial role in ensuring the integrity and reliability of survey data, even in the
face of solar activity. Algorithms built into today’s modern receivers can be designed to detect and filter out erroneous or unreliable GNSS data that may be affected by the disruptions caused by solar storms. These advanced solutions evaluate all the parameters associated with an ionospheric impact for each satellite signal. Then, they adjust the positioning calculation process to account and compensate for the estimated noise/errors introduced by the disturbances. This allows the receiver to still make partial use of satellites experiencing some ionospheric noise rather than discarding them, improving overall positioning accuracy during disturbed conditions.
Moreover, these algorithms can go beyond just filtering out problematic data. They can also combine information from multiple GNSS constellations, as well as other sensors like inertial measurement units (IMUs), to provide more robust and resilient positioning solutions. A sensor fusion approach can help geospatial professionals maintain productivity and accuracy, even when individual GNSS signals are disrupted by the effects of solar storms.
Purpose-built firmware
The emergence of purpose-built firmware to counteract the effects of Solar Cycle 25 is also making a difference. Solutions such as Trimble’s IonoGuard are designed to mitigate ionospheric disruptions in positioning and navigation. When evaluating signals from multiple satellites, it rejects the measurements severely impacted by the ionosphere. It adjusts the processing of all remaining measurements by assessing several per-satellite metrics in a sophisticated GNSS positioning engine. The result is the position derived from measurements that extract as much information as possible under the current ionospheric conditions. IonoGuard has been tested in some of the most challenging atmospheric conditions. For instance, the G5-level geomagnetic storm in May 2024 – the most significant geomagnetic storm since 2003 – lasted for two days. NOAA’s Space Weather Prediction Center measured its Estimated Planetary K-index (Kp) on a nine-point scale, on which it hit maximum values at various monitoring stations.
Figure 2: A chart showing sunspot
Figure 3: Aurora Borealis (Northern Lights) over Scandinavia from the International Space Station. Elements of this image supplied by NASA.
For example, the Northern Alberta GNSS receiver was on a 1.8km real-time kinematic (RTK) baseline. As shown in Figure 1, the ionospheric disturbance began at around 18:00 hours UTC on 10 May 2024, with significant ‘noise’ seen in the position solution. The receiver was clearly struggling to maintain an RTK-fixed solution mode, as RTK-fixed operation dropped below 91%. Conversely, a GNSS receiver on the same antenna running IonoGuard reflected a dramatic improvement in positioning performance. The system maintained an RTK-fixed solution mode throughout the entire geomagnetic storm as shown in Figure 2. Since not all satellites were affected equally at the same time, the firmware was able to form the best solution from available satellites.
Notably, users in areas affected by scintillation and other disturbances reported being able to work through any issues using IonoGuard, while other machines were forced to stop due to positioning inaccuracies – and those errors are clearly visible in Figure 1. As the performance of the position degrades, the solution inflates the estimated error. Once the error estimate is above the customer’s requirement, they will stop executing. However, while advanced firmware can greatly improve positioning accuracy even during extreme events, ionospheric activity can require a waitand-see approach. Continuous monitoring is necessary when high precision is required.
Sources of informed insights
As Sir Francis Bacon was once quoted as saying, “knowledge is power,” and those words are especially true when dealing with the disruptive effects of solar activity. Various resources are available to help professionals stay informed about changing conditions and the potential for disturbances, such as the NOAA website and Spaceweather.com. NOAA’s Space Weather Prediction Center tracks geomagnetic storm activity and provides colour-coded charts to indicate the magnetic storm level. This website issues geomagnetic
Further reading https://www.swpc.noaa.gov/ https://www.spaceweather.com http://www.gnssplanning.com/#/charts
About the author
Stuart Riley is vice president of GNSS technology responsible for GNSS signal processing and products for several Trimble business areas. In this role, he is responsible for the core GNSS technology, from signal reception through to the position engine that is used in all Trimble GNSS precision products.
storm alerts and timely notifications of impending space weather events. Notably, the significant solar storm that occurred in May 2024 was well documented and forecasted by NOAA days in advance.
In addition to storm alerts, the NOAA Geomagnetic Dashboard offers real-time visualizations of auroral activity on maps and plots of solar wind properties. Spaceweather.com complements the NOAA resources, providing daily updates and metrics on solar storms and their resulting geomagnetic and ionospheric effects. Another easy-to-use resource is Trimble’s free online GNSS planning tool, which provides an overview of current and forecasted conditions. Trimble has established a global ionospheric measurement network that allows users to plan ahead and avoid working during times when there is a higher probability of disturbance. The website includes options for satellite availability planning, with users able to choose their location and date/time in the future (based on published almanacs) to plan the best satellite availability. The website also presents total electron content (TEC) and scintillation models that are created by Trimble RTX server software.
Proactive preparation
For applications that require precision or semi- and fully autonomous operations, the loss of GNSS signal due to solar events can be highly troublesome. To minimize the operational impact of such disruptions, geospatial professionals should ask their GNSS providers pointed questions about the performance of their equipment during periods of scintillation and high ionospheric activity. This includes gaining an understanding of how the technology fared during previous solar storms, as this can provide valuable insights into its ability to withstand the challenges posed by the current solar cycle peak. By engaging with GNSS providers, understanding the technological capabilities of their equipment and leveraging the power of advanced algorithms, every professional can better prepare themselves to weather the solar storm and maintain the accuracy and reliability of their work, even during periods of heightened ionospheric activity.
Figure 4: An example map of total electron content, TEC. (Image courtesy: Trimble)
AI for land surveyors
By Wim van Wegen, head of content, GIM International
New AI-based solutions are putting new levels of efficiency, precision and costeffectiveness within reach for surveyors. Here, Wim van Wegen zooms in on one of AI’s most impactful areas: point cloud classification. What will this mean for geospatial professionals?
“Damn! I wish that AI could make point cloud computing suck less. And it would be cool if AI could vectorize these point clouds. I am so tired of crooked roads shooting up into the sky and splitting in two. A flat and straight road would be nice.” This is an example of a quote posted on Reddit in a discussion on artificial intelligence (AI) in surveying.
The post is roughly 1.5 years old. While there is still is a lot of buzz around AI today, back then the topic was even more hyped than it is now. Since then, in the ever-evolving field of land surveying, AI has established itself as a powerful force for transforming the way professionals process and interpret data. With its ability to analyse vast datasets, recognize intricate patterns and automate repetitive tasks, AI is unlocking new levels of efficiency, precision and cost-effectiveness. Moreover, thanks to the growing number of solutions emerging to meet surveyors’ needs, AI is coming into reach for many more geospatial professionals than a couple of years ago.
For example, advancements in artificial intelligence – particularly deep learning
About the author
– are transforming point cloud analysis. As geospatial professionals themselves know all too well, manually editing point clouds comes with its own set of challenges. Sometimes, the sheer volume of data points can be overwhelming. At the other extreme, a sparsely populated point cloud makes it hard to recognize objects. These are just two familiar point cloud struggles. Artificial intelligence and deep learning techniques make point cloud processing easier. Built to interpret complex 3D data with remarkable efficiency, AI models enable automatic segmentation, classification, element and object detection, and change detection. By reducing the need for manual processing, these AI-driven techniques streamline and simplify workflows, and unlock new levels of automation. As an extra benefit, they are removing barriers to broader adoption of 3D point cloud processing technology.
Let’s zoom in on one of AI’s most impactful applications: point cloud classification. Instead of relying solely on manual interpretation, AI-driven algorithms can swiftly identify and categorize features within dense 3D point clouds, making
Wim van Wegen is head of content at GIM International and Hydro International. In his role, he is responsible for the print and online publications of one of the world’s leading geomatics and hydrography trade media brands. He is also a contributor of columns and feature articles, and often interviews renowned experts in the geospatial industry.
it easier to extract meaningful insights. Similarly, AI enhances image matching by integrating traditional feature detection techniques with convolutional neural networks (CNNs). This is improving the accuracy of both aerial and satellite image analysis.
Beyond visual data, AI also plays a crucial role in processing multispectral satellite imagery. By analysing different spectral bands, it can detect subtle variations in land cover, monitor environmental changes and support large-scale mapping efforts with unprecedented detail.
Clearly, AI, cloud computing and leadingedge platforms are remodelling the landscape of point cloud processing. And as AI continues to advance and become more affordable, its influence on land surveying will grow further, refining workflows and expanding the possibilities for geospatial professionals and researchers. Those who embrace these innovations will push the boundaries of 3D data analysis, transforming challenges into opportunities for groundbreaking progress.
To further monitor the development of AIbased learning techniques and learn how to apply them to multisource point clouds, we recommend that you stay tuned to GIM International . By keeping the discussion going, we aim to help land surveyors leverage AI to achieve those flat and straight roads they desire. And the best way to truly understand how something works is to see how it is applied in practice – so if you have a real-life success story you are willing to share, please let us know!
Geospatial data indispensable from start to finish
Innovative technology keeps surveyors safer in Dutch highway reconstruction project
By Lars Langhorst, contributing editor, GIM International
Advanced surveying techniques are indispenable in the infrastructure sector, where geospatial data holds the key to more efficient design, more accurate execution and more sustainable development. The recently completed ‘Ring Zuid’ highway project in Groningen, the biggest city in the north of the Netherlands, is a prime example of this. The aim was to reconstruct the southern ring road to improve accessibility, traffic flow, quality of life and safety in and around the city. Surveyors and site engineers from Geomaat were closely involved in the preparation, execution and completion of this project, which was one of the nation’s most complex infrastructure projects in recent years.
Partly due to increasing traffic levels, the aim of the ‘Ring Zuid’ project (2019-2024, €927 million) was to reconstruct the southern ring road (the N7) on the outskirts of the Dutch city of Groningen to improve capacity and traffic flow. The existing road featured lots of traffic lights and junctions, which frequently resulted in congestion. Key components of the project were the conversion of the two biggest bottlenecks to grade-separated intersections, and the lowering and partial tunnelling of the N7.
Specifically, the project included altering the trajectory of the road, constructing three tunnels and adapting a number of crossroads. This would reduce congestion and improve the accessibility of the city and surrounding area. At the same time, lowering the road and creating more green spaces would reduce noise pollution and improve the attractiveness of the urban landscape, thus improving the quality of life in the nearby neighbourhoods.
Additionally, new infrastructural elements were developed for the local community. These included a tunnel for pedestrians and cyclists, and a safe cycle route that
enabled cyclists to pass beneath the ring road without having to navigate busy junctions. These changes would not only improve road safety, but also enhance the immediate surroundings for local residents and businesses.
Objectives of the ‘Ring Zuid’ project
1. Improving accessibility: Widening the ring road and modernizing the infrastructure to make it easier for motorists to reach their destinations.
2. Traffic flow: Reducing the number of traffic lights and improving traffic conditios to ensure a smoother traffic flow, which also reduces journey times.
3. Liveability: Reducing noise and air pollution in the vicinity of the ring road to improve liveability in the nearby neighbourhoods.
4. Safety: Improving safety for both motorists and pedestrians with better infrastructure and fewer traffic lights.
The role of surveying
The surveyors and site engineers were crucial to the success of the ‘Ring Zuid’ project, from design to completion. Thanks to their adaptability, they played a big part in helping to solve complex challenges. Meanwhile, their proactive monitoring directly contributed to the quality, safety and efficiency of the project in a number of areas, including:
1. Tunnel geometry precision: optimal concrete layer thanks to digital accuracy
Surveyors were constantly involved in the various phases of constructing the tunnels. For example, they provided detailed 3D models of the tunnels, allowing engineers to determine the exact thickness of the concrete backfill layer before pouring. This accuracy was essential to correct deviations stemming from previous construction phases. In the dynamic environment, the surveyors used total stations to gather hundreds of reference points quickly, efficiently and error-free. This was essential to capture the unique tunnel shapes. It would not have been possible to complete the project on time and cost-efficiently without that data.
2. Flexibility in the field: the right tool for every situation
In each case, the surveyors selected the tools that suited the situation and the required level of accuracy. Whereas GPS was sufficient for general terrain measurements, total stations were the right choice for restricted tunnel environments. Whenever possible, the Streetmapper – Geomaat’s mobile 3D scanner solution – was used to acquire large volumes of data efficiently. However, traditional methods also came in useful, mainly in areas with no GPS signal or where poor access made it difficult to place scanners.
3. Proactive monitoring: a safer environment
The surveyors went beyond merely taking traditional measurements by also continuously monitoring environmental risks using innovative techniques. For instance, they kept track of:
• Compaction (using precision levelling and hundreds of facade anchors)
• Groundwater levels (using monitoring wells)
• Vibrations (using vibration sensors)
• Drainage (using measuring poles)
This real-time data prevented surrounding buildings from becoming damaged and ensured that the construction work progressed safely. For example, the rapid detection of even the slightest subsidence allowed countermeasures to be taken immediately.
Technologies for safer working
During the ‘Ring Zuid’ project, specific protocols and methodologies were followed to ensure that the surveyors could collect data safely as well as efficiently. The Robotplotter and the Streetmapper were two technologies that played an important role in this.
Robotplotter
The Robotplotter, which can be operated remotely, allowed the surveyors to apply road markings without having to put themselves in the direct vicinity of the traffic. The Robotplotter can autonomously
Figure 1: The newly completed ring road in Groningen opened after six years of construction. (Image courtesy: Sander van der Werf/Shutterstock).
Figure 2: Measurements and scans were triangulated into an accurate model for designers and engineers during the execution phase.
Tackling the Global Challenges Serving society, benefitting people and the planet
represents the interests of surveyors, land professionals and related professions worldwide members are national surveying and geospatial associations, representing more than 300,000 individuals includes Land Government Agencies & Ministries, Surveying Universities and the Geospatial Industry among its memberships professional work is led by Commissions, Networks, Task Forces and Permanent Institutions will celebrate its 150th anniversary in Paris in 2028 organises events to enhance Networking, Knowledge Sharing and International Cooperation contributes to the global agenda in cooperation with UN agencies and other stakeholders
represents the interests of surveyors, land professionals and related professions worldwide members are national surveying and geospatial associations, representing more than 300,000 individuals includes Land Government Agencies & Ministries, Surveying Universities and the Geospatial Industry among its memberships professional work is led by Commissions, Networks, Task Forces and Permanent Institutions will celebrate its 150th anniversary in Paris in 2028 organises events to enhance Networking, Knowledge Sharing and International Cooperation contributes to the global agenda in cooperation with UN agencies and other stakeholders
can attend FIG Working Weeks, Congresses and other FIG events can be active and have influence on the work and achievements of FIG can contribute to the global agenda making the world a better place
can attend FIG Working Weeks, Congresses and other FIG events can be active and have influence on the work and achievements of FIG can contribute to the global agenda making the world a better place
TASK FORCES 2023–2026
• FIG and the Sustainable Development Goals
• FIG Climate Compass – The Surveying Profession’s Global Response to Tackling the Climate Agenda
• The Role of FIG in international Trends and Future Geospatial Information Ecosystem
• The Surveyor’s Profession: Evolutionary Diversity and Inclusion
• Young Surveyors
• Standards
• Regional
operate in a straight line guided by a global positioning system (GPS) or terrestrial positioning system (TPS), thus reducing the number of potentially dangerous situations.
Streetmapper
The Streetmapper-IV is an advanced mobile 3D mapping system capable of scanning up to two million points per second with an accuracy of up to 3mm without interrupting the traffic flow. Thanks to Geomaat’s self-developed and continuously evolving artificial intelligence (AI) system, the Streetmapper not only automatically detects objects such as road markings, light poles, signs and guide rails, but also conducts a deeper layer of logical checks. The system then filters out moving objects (e.g. cars, cyclists and pedestrians), leaving only the static infrastructure, resulting in the near real-time transformation from point cloud to classified objects.
Both these technologies improve the work of surveyors and site engineers by allowing them to capture more data more accurately, more efficiently and, above all, more safely. Additionally, the resulting data is reliable enough to be used as the basis for future analysis and comparisons. As a result, this approach not only shortens the amount of time spent in the field, but also reduces the need for return visits to conduct repeat measurements.
About Richard Kainama
Richard Kainama, leader of the surveying team at Geomaat, led a team of up to ten surveyors and three work planners. The team’s tasks ranged from placing markers and mapping the environment using GPS, spirit levels and total stations, to performing both static scans and mobile ones using the Streetmapper. Geomaat took care that the design was a true representation of the environment and worked in close collaboration with MUG Ingenieursbureau (which has recently been acquired by Movares and will soon be known as Movares Smart Urban Engineering). Multiple engineering design firms were involved in the preparation and execution phases of the ‘Ring Zuid’ project. Among other things, Geomaat’s role was to perform checks and verify that the geometry of the designs was in line with the real-life situation.
About the author
Improving liveability
Lars Langhorst (MSc) has a background in geomatics, and is now focusing on digitalization in the world of asset monitoring. At Sweco, he is working on digital solutions for the surveying industry, aimed at using data to help engineers make every decision a data-driven decision.
Since the completion of the project, the Municipality of Groningen has been focusing on further improving local infrastructure and liveability. An important part of this is the construction of a new park on top of the tunnels. This park will not only create more room for nature, but will also create a recreational space and meeting place for residents. In addition, the municipality is redesigning some roads in the city to improve traffic flow and safety.
Conclusion
Tackling Groningen’s southern ring road was a far-reaching infrastructure project. The aim was to have a lasting positive impact on both the city’s development and life in the local community by improving accessibility, traffic flow, liveability and safety in and around Groningen. These objectives were definitely achieved. Geomaat’s land surveyors and site engineers played a crucial role in the preparation, execution and completion of the project. Innovative technologies such as the Robotplotter and Streetmapper improved the efficiency and safety of the work.
Major projects such as ‘Ring Zuid’ illustrate the growing need to not only build new infrastructure, but also to replace, renovate and reconstruct existing infrastructure. In future large-scale projects over the coming years, the lessons learned during ‘Ring Zuid’ will provide valuable knowledge in the areas of efficiency, safety and the added value of combining traditional land surveying with state-of-the-art mapping techniques.
captures millions of points per second quickly and efficiently while driving, without disrupting the traffic flow. The surveyors sit safely inside the vehicle.
Figure 3: Robot plotters work quickly, accurately and autonomously. This allows operators to remain at a safe distance from traffic.
Figure 4: The Streetmapper
Two new FIG publications
The International Federation of Surveyors (FIG) has recently added two new editions to its long list of FIG publications about surveying-related topics.
FIG Publication 84
The Land Administration Domain Model – An Overview
In 2012, the Land Administration Domain Model (LADM) was approved as an official ISO standard. The LADM is a conceptual information model. It describes and structures the core of a land administration: information about people, about land and about people-to-land relationships.
LADM supports the establishment of a common view on land administration across stakeholders involved. It stimulates the development of software applications and accelerates the implementation of proper land administration systems in support of sustainable development. It supports interoperability in land administration. This is a real need because land administration is mostly implemented under distributed mandates with many stakeholders. The LADM provides an internationally recognized model and vocabulary, which provide a solid foundation for the development process.
It covers the ‘information-related’ components of land administration, including those over water and land, and elements above and below the surface of the Earth. This means in practice that the representation of all tenure types is being supported – even when overlapping – and that 3D land administration can be developed. There are now implementations of LADM all over the world. This publication gives an overview.
The publication is intended for anyone wishing to learn more about LADM: why it is needed, how it is designed, what it is and what the benefits are. The authors of the publication – Christiaan Lemmen, Peter van Oosterom, Abdullah Kara and Eftychia Kalogianni – have been central in the development of the LADM. The overview publication has an extended version titled
‘LADM in the Classroom’ with a focus towards training and higher education.
FIG Publication 83
A Call to Action: Climate Responsible Land Governance and Disaster Resilience: Safeguarding Land Rights
This publication is based on the FIG Regional Conference on ‘Climate responsibleland governance and disaster resilience: safeguarding land rights,’ held in Kathmandu, Nepal, in November 2024. The theme is chosen to support surveyors and land practitioners in addressing some of the most urgent challenges of today. We are in the critical path of the sustainability of the planet because of our work on security of tenure, land governance, geospatial information management, land administration and land management, spatial planning and valuation, building information modelling (BIM), etc.
This publication is a resource for continued learning and also a call to action. FIG hopes it serves as an enduring source of inspiration for advancing climate-responsive land governance and building resilient communities. It should inspire innovative ideas, enduring partnerships, and meaningful progress in the years to come. The plenary
sessions were world class, and challenged business-as-usual approaches to land administration, geospatial technology and data approaches in the face of the climate crisis. Climate-resilient land administration and governance is needed as well as the integration of climate and land administration data to enhance climate and disaster resilience. The technical papers from a region directly impacted by the climate crisis and natural disasters were often cutting edge and world leading.
The call to action is based on the innovative thinking presented. It can provide valuable guidance for governments, professionals, academics and NGOs, both regional and national. Young surveyors particularly have a critical role to play because of the uncertain outlook for the Asian region due to climate change and poorly managed natural disasters. The call to action has already inspired the creation of a regional platform to discuss surveying issues regarding climate and disaster resilience. The publication is edited by Clarissa Augustinus, Ganesh Prasad Bhatta, Tina Baidar and Sanjeevan Shrestha. More information www.fig.net
Modernizing cartographic education: challenges and solutions for future map makers
Cartography – the art and science of mapmaking – has long played a crucial role in shaping human understanding of the world. However, as technology advances, cartographic education has struggled to keep pace. Many academic programmes remain fragmented, outdated or undervalued. To address this, organizations like the International Cartographic Association (ICA) and select universities are working to modernize curricula.
Cartography is inherently interdisciplinary, combining art, science and technology. This complexity makes it difficult for institutions to position it within academic frameworks, often subsuming it under geography, computer science or environmental studies. While integration can be beneficial, it often dilutes cartography’s specialized focus.
Challenges in cartographic education
A major issue is the lack of standardization in cartographic education. Programmes vary in scope, with some emphasizing traditional methods and others focusing on emerging technologies. This inconsistency leaves students ill-prepared for the evolving job market. Additionally, access to formal cartographic education is limited, with only
a handful of universities offering specialized programmes.
Technological advancements, such as artificial intelligence (AI), augmented reality (AR) and real-time geospatial data, have rapidly transformed the field, yet many educational institutions struggle to update their curricula accordingly. Furthermore, cartography remains undervalued as a discipline despite its importance in daily life. This lack of recognition contributes to underinvestment in research and education. The ICA plays a vital role in bridging these gaps. Its Commission on Education and Training promotes knowledge exchange, develops resources and organizes workshops to help standardize and modernize cartographic curricula.
A model programme for modern cartography
The International Master of Cartography, a joint initiative by four European universities –Technische Universität München, Technische Universität Wien, Technische Universität Dresden, and the University of Twente –serves as a model for modern cartographic education. This programme integrates theoretical foundations with practical applications, covering geovisualization, spatial data science, cartographic design and web mapping. It also introduces students to emerging technologies like big data analytics and 3D cartography.
A key feature of the programme is its emphasis on international collaboration. Students from diverse backgrounds engage with a global faculty, gaining perspectives that reflect the international nature of cartography. Additionally, real-world projects and internships bridge academia and industry, equipping graduates with practical skills and professional networks.
Balancing 3 essential competencies
A well-rounded cartographic education should balance three essential competencies: design knowledge, data management skills, and technological expertise. A sample
curriculum might include:
• Foundations of cartography: History, principles and user-centered design.
• Geovisualization & data representation: Techniques for thematic and interactive mapping.
• Spatial data science: Spatial statistics, geospatial processing and machine learning.
• Web & mobile cartography: Interactive maps, web mapping libraries and responsive design.
• Cartographic design studio: Advanced design principles for diverse map types.
• Geospatial big data analytics: Handling large datasets for urban planning and disaster management.
• 3D & multimedia cartography: AR, VR and immersive mapping techniques.
• Ethics in cartography: Social responsibility, inclusivity and ethical considerations.
• Geopolitical & cultural dimensions: How maps influence political and cultural narratives.
• Professional practice: Industry collaboration, internships and real-world projects.
The need to modernize cartographic education is urgent. As spatial data becomes increasingly crucial in global decisionmaking, educators, policymakers and industry leaders must collaborate to make curricula more contemporary. The success of the International Master of Cartography highlights the importance of interdisciplinary learning, technological integration and global perspectives. By embracing these principles, cartographic education can remain dynamic and relevant in the 21st century.
www.ica.org www.cartographymaster.eu
Increasing AI elements: ISPRS
Mid-term Symposia overview
Artificial intelligence (AI) technology has become deeply integrated into ISPRSrelated fields, significantly transforming the way geospatial information is captured, processed, interpreted and analysed. This was evident in the ISPRS Mid-term Symposia, organized by five ISPRS Technical Commissions in 2024. All of them featured a substantial increase in AI elements, demonstrating the profound impact AI is having on advancing photogrammetry, remote sensing and geospatial science.
Technical Commission I, dedicated to Sensor Systems, hosted the ‘Intelligent Sensing and Remote Sensing Application’ symposium in Changsha, China, from 13-17 May 2024. More than 1,500 representatives from 29 countries and regions attended the event. A total of 174 full papers were published. Three tutorials were organized (including one on the topic of ‘Point Cloud Processing with AI’). Additionally, a contest on ‘Intelligent Interpretation for Multi-modal Remote Sensing Application’ was held, featuring more than 300 teams and a total of 800 participants.
Technical Commission II, specializing in Photogrammetry, organized the symposium on ‘The Role of Photogrammetry for a Sustainable World’ in Las Vegas, USA, from 11-14 June 2024. It was attended by approximately 150 people from 24 countries, and about 100 papers were published.
Tutorials on ‘AI-based 3D Scene Capture and Modelling’ and ‘Benchmarking Underwater Photogrammetry’ were organized as the side events of the symposium.
Technical Commission III, focusing on Remote Sensing, organized the ‘Beyond the Canopy: Technologies and Applications of Remote Sensing’ symposium in Belem, Brazil, from 4-8 November 2024. The diverse themes of the symposium ranged from satellite image acquisition and processing techniques (space missions, sensors, algorithms, etc.), to applications in many fields, all closely related to AI. A workshop on ‘Geospatial Intelligence: Bridging AI, Environmental Management, and Disaster
Resilience’ was arranged as a side event of the symposium.
Technical Commission IV, concerned with Spatial Information Science, organized the symposium titled ‘Spatial Information to Empower the Metaverse’ in Perth, Australia, from 22-25 October 2024. A total of 491 participants from 29 countries attended, and there were 292 accepted submissions. The 40 sessions included one on ‘AI and Uncertainty Modelling in Spatial Analysis’ and another on ‘Intelligent Systems in Sensor Web and IoT’. Additionally, a panel discussion was organized on ‘The Role of International Organizations in the World of AI and Digital Twins’.
Technical Commission V, focusing on Education and Outreach, organized the ‘Insight to Foresight via Geospatial Technologies’ symposium in Manila, Philippines, from 6-8 August 2024. A total of 176 people attended and 60 papers were published. As a side event of the symposium, an ISPRS Summer School was held entitled ‘AI for Geospatial Applications’, with the classes covering cutting-edge GeoAI technologies.
Sonobot 5
uncrewed surface vehicle
Autonomous navigation, advanced data acquisition, and AI-powered insights for seamless operations in challenging environments
• Accurate geo-referenced bathymetry, search and monitoring in hard-to-reach areas
• High-precision measurements and recordings, different GNSS and sonar options available
• Autonomous and remotely-controlled operation
• Data logging and real-time acquisition over redundant mesh network
• Exchangeable battery packs for 9+ hours of operation
• System software for mission planning, execution and data evaluation
• Rapid system deployment, excellent maneuverability and area coverage with powerful and efficient drives
• AI-based object recognition for side-scan sonar: objects of interest are detected live during the mission
RIEGL VZ-600i
RIEGL’s New Era of Terrestrial Laser Scanners
• 3D position accuracy up to 3 mm @ 50 m
• scan time with image acquisition: < 30 sec. / scan with 6 mm resolution @ 10 m distance
• up to 60 scan positions per hour
• broad range capability (0.5 m up to 1000 m)
• precise real-time on-board registration
• internal cameras & GNSS receiver
• GNSS RTK receiver, full format system camera, etc. (optional)