9 minute read
10. Epílogo


avanzadas que se acercan a un estado de madurez elevado, como la cosechadora robótica de fresas desarrollada por la compañía española Agrobot (Figura 14.b), actualmente en estado precomercial (www.agrobot.com/e-series) y con resultados satisfactorios fruto de la combinación de visión e inteligencia artificial.

a) b)
Figura 14. Robotización para la recolección de frutas: a) Acondicionamiento del cultivo de cerezas en espaldera (EEUU); b) Robot para recoger fresas (Agrobot, España).
10. Epílogo
Según la Academia Nacional de Ingeniería de Estados Unidos (NAE, 2021), la mecanización agraria ocupa el séptimo lugar dentro de los veinte adelantos más importantes del siglo XX, precediendo a inventos tan populares como internet, el teléfono o incluso los ordenadores. Este avance constituyó la primera tecnología disruptiva moderna en agricultura, pero fundamentalmente benefició a países industrializados con capacidad para producir máquinas, especialmente en Estados Unidos, donde la mano de obra escaseaba y las explotaciones eran inmensas. A mediados de ese siglo, tuvo lugar un segundo salto disruptivo, la Revolución Verde encabezada por Norman Borlaug, cuya contribución a la lucha contra el hambre, esta vez centrada en países en desarrollo, le fue reconocida con el premio Nobel de la Paz en 1970. Tras un siglo desde la primera tecnología disruptiva, la producción de alimentos, que ahora debe ser sostenible tanto desde el punto de vista socioeconómico como medioambiental, vuelve a encontrarse ante retos de tal calado que sólo un salto tecnológico disruptivo parece ser capaz de contrarrestarlos. El progreso realizado en informática y electrónica de las últimas décadas, y el beneficio demostrado por ambas en aplicaciones agrícolas, apuntan a la agricultura digital como tercera tecnología disruptiva, con sus innovaciones prácticas como la agricultura de precisión, los sistemas expertos de ayuda a la toma de decisiones y la robótica agrícola. Con ella, más que una mejora gradual y paulatina, se esperan saltos cualitativos que puedan dar lugar a cambios de paradigmas asentados durante mucho tiempo, como por ejemplo la sustitución de motores de combustión interna por motores eléctricos como en el caso de los robots de las Figuras 5 (c y d), 9, y 13.
Un capítulo que tiene por objetivo revisar los avances recientes en robótica agrícola, y que además considera a la robótica como el último eslabón de la mecanización agraria por el cual no sólo el esfuerzo físico de los agricultores, sino el mental, se ve complementado por máquinas, no puede ignorar una preocupación recurrente que tiene su génesis en los mismos inicios de la revolución industrial: ¿va la robótica a eliminar los puestos de trabajo en las actividades
agrícolas?, ¿producirá la extinción irreversible del agricultor? No son cuestiones triviales y deben abordarse con detenimiento para evitar conclusiones precipitadas y ligeras. Si el objetivo de la agricultura digital es asegurar la sostenibilidad de la actividad agrícola, la idea no es eliminar al agricultor sino todo lo contrario, asegurar su permanencia y bienestar a lo largo del tiempo. Por ello, el análisis de los efectos socioeconómicos de introducir la robótica en el campo debe basarse en dos supuestos: en primer lugar, el uso de datos numéricos y estudios procedentes de fuentes fiables que aporten evidencias y, en segundo lugar, centrarse en el caso particular de la agricultura, ya que otros sectores tienen problemáticas diferentes. En la introducción ya vimos lo difícil que resulta definir un robot de manera genérica, ya que la diversidad es tan grande que no ha sido posible encontrar una definición satisfactoria para todos. Por tanto, la situación que subyace ante la introducción de robots fijos en cadenas de montaje, o robots de compañía en residencias para ancianos poco tienen que ver con el desembarco de robots agrícolas en el campo. Con estos supuestos en mente, en el párrafo siguiente procedemos a analizar las posibles consecuencias de introducir robots y automatización en la producción agrícola.
En el año 1910, 18 % de la población activa de EEUU se dedicaba a la agricultura. Sin embargo, en 2012 esta cifra había descendido al 1 % (Stone, 2014), en gran parte como consecuencia de la mecanización. ¿Qué ocurrió con toda esa mano de obra? Se produjo una adaptación en el sector, y la nueva industria fabricante de tractores absorbió a muchos trabajadores que ya no encontraban trabajo en el campo. A veces resulta inevitable hacer la asociación directa entre la destrucción de un número de empleos y el aumento de las tasas de desempleo, sin embargo, debemos tener en cuenta la elasticidad del mercado y su capacidad de innovación. De hecho, los datos nos pueden indicar todo lo contrario. Tras la invención y adopción generalizada de los cajeros automáticos, cabría esperar un aumento considerable del desempleo entre los empleados en banca. Contra todo pronóstico, el número de empleados en sucursales bancarias aumentó de 450.000 a 527.000 en EEUU durante las dos primeras décadas del funcionamiento del cajero automático (Jordan, 2017). Japón declaró una tasa de desempleo del 4 % para el año 2013, y según la Federación Internacional de Robótica, para ese mismo año el país nipón contaba con 323 robots por cada 10.000 trabajadores, cifra sorprendente si tenemos en cuenta que en EEUU había 152 robots por 10.000 trabajadores ese año (Jordan, 2017). No obstante, cada sector tiene unas peculiaridades específicas, y deberíamos centrarnos en el ámbito agrícola. Existen estudios socioeconómicos que afirman (Burks, 2008) que la introducción de la robótica agrícola en el campo producirá más puestos de trabajo de los que pueda inicialmente destruir. En todo momento estamos pensando en sustituir trabajos, pero en algunos cultivos estamos viendo tareas para las que hay poca disponibilidad de mano de obra especializada, como la poda de viñedos en Francia, la recolección de fresas en España, o la recogida de espárragos en Alemania. En estos casos, la ausencia de una solución viable puede llevar a la desaparición de muchas explotaciones, sobre todo familiares. Por otra parte, la introducción de tecnologías digitales requerirá la creación de empresas de fabricación y mantenimiento de equipos inteligentes, asesoramiento para el análisis de datos y toma de decisiones, o simplemente la presencia de agentes de extensión agraria que transmitan la necesaria formación a los usuarios finales, que serán agricultores con poco tiempo para leer manuales de instrucciones o seguir tutoriales desde el ordenador. Según Brynjolfsson y McAfee (2016) el progreso inherente a la revolución digital puede enriquecer nuestras vidas como nunca antes, pero a costa de una formación mínima que permita el uso efectivo de los nuevos avances. Es por ello que los
agricultores del siglo XXI necesitan desarrollar nuevas habilidades acordes con la tecnología disponible hoy en día y en los próximos años. La robótica puede acometer la parte más dura del trabajo en el campo, aquella que nadie quiere hacer, que por eso muchas veces acaba en manos de inmigrantes, y que está disuadiendo a la juventud a la hora de emprender negocios y ejercer una profesión en el ámbito agrícola. Sin embargo, el agricultor todavía será imprescindible en la organización, gestión, toma de decisiones, y planificación estratégica ligada a las explotaciones. Pero a pesar de las oportunidades que la tecnología puede introducir –y de hecho ya está introduciendo– en la producción agraria, sigue habiendo un rechazo por una pequeña parte de la población rural que siente una amenaza para su statu quo. Esta oposición a la tecnología ya ocurrió en Inglaterra cuando se produjeron los primeros telares mecánicos en 1785, volvió a aparecer con el primer arado de acero inventado por John Deere en 1837 (se aseguraba que el acero arruinaba la fertilidad del suelo), y la seguimos observando hoy en día con el advenimiento de los robots agrícolas. La fotografía de la Figura 15 es una instantánea tomada en la Feria Internacional de la Robótica Agrícola de Toulouse, el 11 de diciembre de 2018, donde aparecen los autodenominados chalecos amarillos protestando por “la ruina que los robots van a traer al campo (francés)”. Los manifestantes irrumpieron en medio de la conferencia e impidieron el desarrollo normal del orden del día previsto, boicoteando la ponencia que se estaba celebrando en ese momento, y rechazando participar en una mesa redonda prevista al final de la mañana a la que se les invitó, de manera improvisada, para que expusieran sus ideas de manera civilizada.
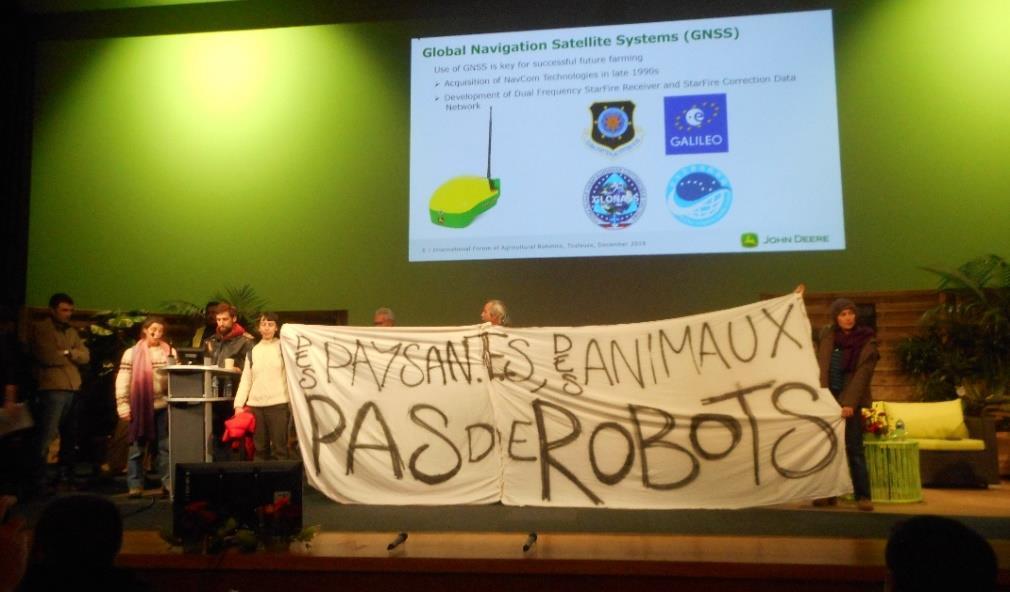
Figura 15. Manifestaciones y protestas contra la robótica en agricultura en la Feria Internacional de la Robótica Agrícola en diciembre de 2018 (FIRA, Toulouse, Francia)
El progreso que viene realizando la robótica desde los años noventa del siglo anterior ha sido gradual, pero en la última década se ha producido una aceleración con resultados extraordinarios (Brynjolfsson y McAfee, 2016), lo que ha llevado a una proliferación de soluciones prácticas, incluyendo el mundo de la agricultura. Este capítulo, no pretende ser un exhaustivo inventario de todas las soluciones existentes en automatización y robótica agrícola, sobre todo porque sería imposible, ya que continuamente están apareciendo nuevos prototipos, comerciales o en fase conceptual, ofertados por fabricantes consolidados o empresas de reciente creación (start-up), sofisticados o simples, autopropulsados o arrastrados, eléctricos o convencionales. Nuestro objetivo ha sido exponer el estado actual a través de ejemplos que consideramos representativos del momento actual, pero por encima de los ejemplos
particulares, la idea es transmitir una visión de la agricultura del futuro dentro del contexto de la digitalización, automatización y robótica, que en base a las evidencias que hemos ido exponiendo en el texto, no puede ser menos que optimista. Desde un punto de vista social, una profesión dotada tecnológicamente con las mismas herramientas que el resto de sectores industriales, y en algunos casos con soluciones incluso más avanzadas, puede revitalizar la población rural y atraer a jóvenes agricultores, tanto hombres como mujeres, que puedan dar respuesta a una vocación tan trascendental como es alimentar a la población, sin tener que estar sometidos a los disuasorios rigores del trabajo físico, cada vez más “en manos” de las máquinas, las actuales, y las que sin duda llegarán en décadas venideras.
Bibliografía
Agropopular. Francia anuncia una serie de restricciones en el uso del glifosato antes de su prohibición total. https://www.agropopular.com/francia-restricciones-glifosato091020. Acceso: 16 febrero 2021.
Brynjolfsson, E; McAfee, A. (2016). The second machine age. New York: W. W. Norton & Company, Inc., (Cap. 1).
Burks, T. F.; Schmoldt, D. L.; Steiner, J. J. (2008). U. S. specialty crops at a crossroad. Hi-tech or else? Resource: September. ASABE, St. Joseph, MI, USA.
Foley, J. (2014). A five-step plan to feed the world. National Geographic. May.
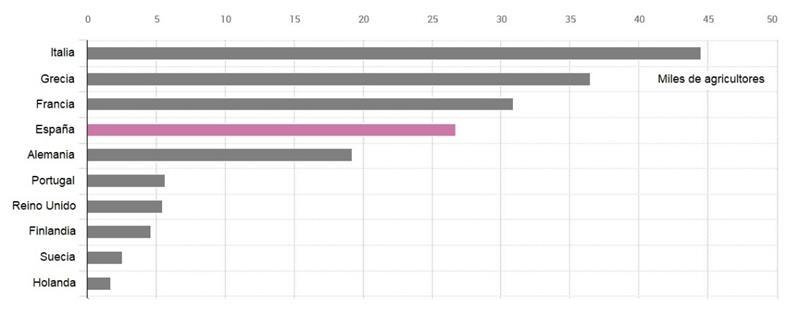
Fresh Plaza. Los agricultores superan la media de edad de la UE. http://www.freshplaza.es/article/93922/Los-agricultores-espa%C3%B1oles-superanla-media-de-edad-de-la-UE. Acceso: 11 enero 2017.
John Deere. (2010). Introduction to crop production. Deere & Co, Moline, IL, USA.
Jordan, J. (2016). Robots. Cambridge, MA: MIT Press, (Cap. 1, 4 y 7).
Kondo, N.; Monta, M.; Noguchi, N. (2011). Agricultural robots, mechanisms and practice. Kioto, Japón: Kyoto University Press y Melbourne, Australia: Trans Pacific Press (Cap. 2, 3 y 4).
NAE (US National Academy of Engineering). http://www.greatachievements.org/. Acceso: 18 febrero 2021.
Rovira-Más, F.; Han, S. (2006). Kalman filter for sensor fusion of GPS and machine vision. In Proceedings of the ASABE Annual International Meeting, Portland, OR, EEUU. ASABE Paper 063034.
Rovira-Más, F.; Zhang, Q. (2008). Fuzzy logic control of an electrohydraulic valve for autosteering off-road vehicles. Journal of Automobile Engineering, 917-934.
Rovira-Más, F.; Saiz-Rubio, V; Cuenca-Cuenca, A. (2020). Augmented perception for agricultural robots navigation. IEEE Sensors Journal 2020, 1-16, DOI 10.1109/JSEN.2020.3016081
Russell, S.; Norvig, P. (2003). Artificial intelligence, a modern approach. (2nd ed.). Upper Saddle River, NJ: Pearson Education, Inc., (Cap. 1).
Saiz-Rubio, V.; Rovira-Más, F. (2020). From Smart farming towards Agriculture 5.0: a review on crop data management. Agronomy, 10 (207): 1-21.
Stone, A. (2014). American farmers are growing old, with spiraling costs keeping out young. National Geographic. September.
Verified Market Intelligence (VMI). (2018). Global agricultural robots: market size, status and forecast to 2025. Boonton, NJ, EEUU.