
By Eugene Demaitre and Mike Oitzman • The Robot Report

By Eugene Demaitre and Mike Oitzman • The Robot Report
Both the enabling technologies and use cases for collaborative robot arms are continuing to evolve, according to Chris Savoia, head of ecosystem success for the Americas at Universal Robots A/S. He recently spoke with The Robot Report Podcast about this and topics including the importance of safety, recent advances in higher-payload robots, and mobile manipulators.
Savoia also discussed Odense, Denmark-based Universal Robots’ new Polyscope X platform for developers, the enhancements from MotionPlus, and the OptiMove control feature.
Here are some highlights of that conversation, edited for length.
UR+ ecosystem, payload capacity both grow Mike Oitzman: We've watched the success of the UR+ ecosystem. It
speaks to the utility of the UR robot and how you've been able to go to so many different segments and verticals in the marketplace to hit with specific applications and using other partners to get you there.
Savoia: You'll see a recurring theme with us that we're a platform company. And we're still on the precipice of unlocking robotics for the masses.
I think a big part of that is giving people a platform to do innovation. You know, we couldn't have seen all the things that were going to happen with the ecosystem when we first set out to do it.
And it's been really cool to see the way that our partners pull us into places that we don't want to go or don't [initially] think are important.

Eugene Demaitre: Speaking of robotics trends and innovation, Universal Robots has released newer, higher-payload cobots. Collaborative robots were always viewed as sort of a subset or even a cousin to industrial robots, but that's no longer really the case, is it?
Savoia: In the past year and a half, Universal Robots has released the UR 20 and the UR 30, which are 20 kg [44 lb.] and 30 kg [66 lb.], respectively.
I like to think of it as still human scale. They have allowed us to build out a portfolio that allows the breadth of what a human might do.
We're not going to be picking up electric vehicles, battery packs, and things like that. We're not going to have 2,000 kg [4,409 lb.] payload robots, but certainly we’re approaching industrial scale.









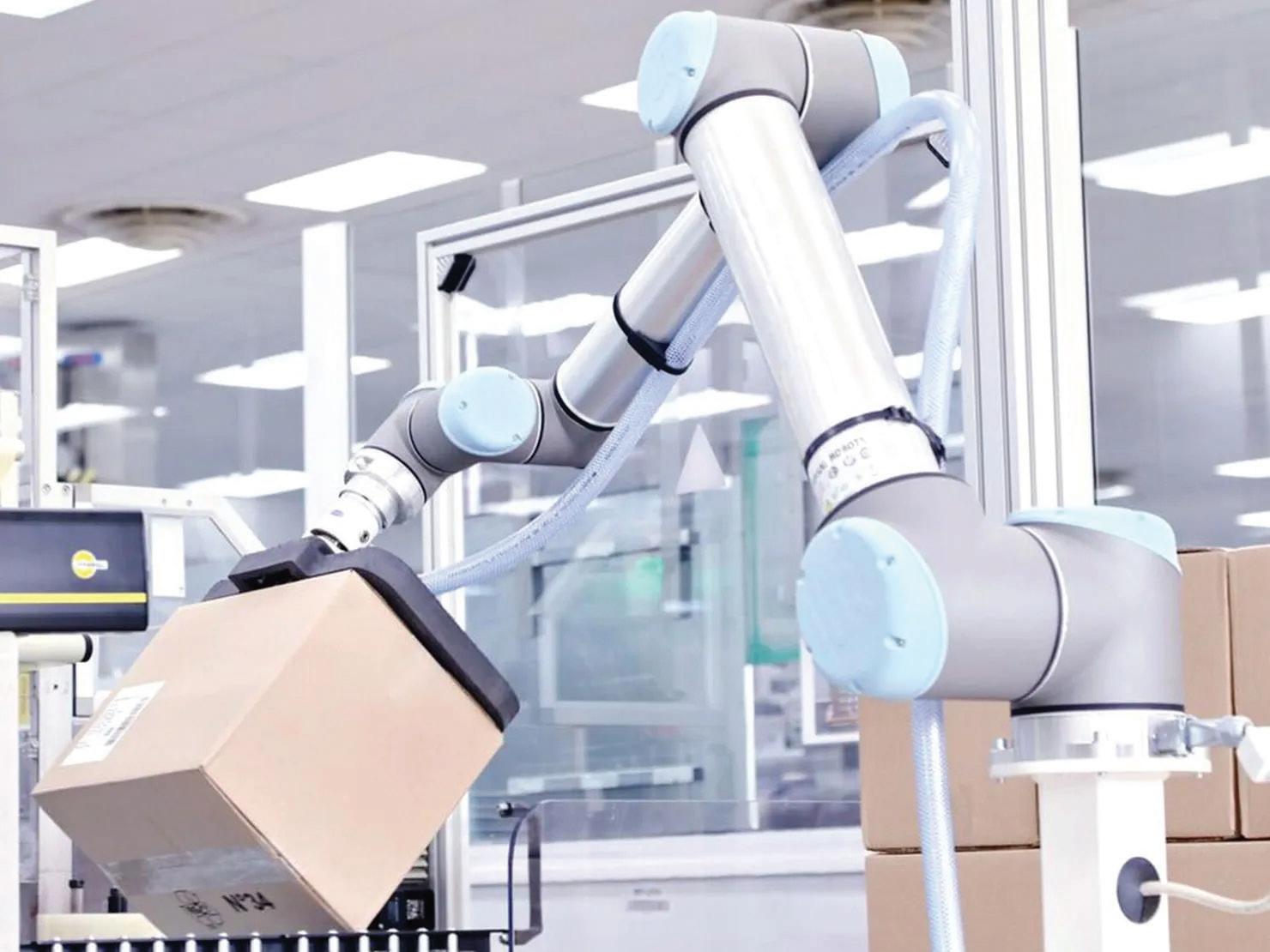
In the past quarter or so, we also took the UR20 and UR30 and added five more kilograms of payload. That was done in a very specific way. So that's only done when the tool flange or the end of the robot is pointed down. And so you can imagine that it's only in the orientation where you'd be picking up a box or something like that.
The natural thing to question there is, how can you just give a robot five more kilograms? There are obviously mechanical things going on, but it’s important to point out that robots are not just mechanical systems. They're very tightly integrated with software control systems.
In fact, UR cobots are not weak robots. They just have a very good control system and a safety system that's governing the amount of torque and power that the motors and joints can put out. So what we've been able to do is find in that particular orientation, there's mechanical surplus that allows us to get this extra payload.
Get started with safety assessments
Demaitre: In terms of safety, we always tell people they need to do a safety or risk assessment based on the application and not just on the robot because the
payload, the range of motion, all those things matter.
Savoia: I'm really active in the safety community. I go to the [ANSI/RIA] R1506 meetings all the time, and I'm very up to date with like what's happening with these changes in ISO 10218 and things like that.
People may think that a safety assessment is a big bearish thing to think about. If I had one piece of advice is that it is way easier than you think it is. It really is about just looking at who is in the workcell, what those people are doing, the tasks in the workcell, and then how much of a chance do you have of those tasks of hurting someone.
And there's tons of really good documentation, like Robotiq’s riskassessment flow chart. The hardest thing is starting; it’s like writing an essay for school. You just gotta do it, and then it gets way easier.
PolyScape X is part of UR’s platform strategy
Demaitre: Can you tell us a bit about what the PolyScope X release means, and how does it help robotics developers and end users?
Savoia: This is a big re-platforming for us. It's a really important piece of our strategy going into the future.
PolyScope X allows us to do a lot of things that we have found through a lot of repetition to be difficult in the past. We've had this amazing ecosystem of people developing apps, and we're taking that to the next level now. PolyScope X is as much for developers as it is for end users.
For developers, we're giving you access to modern technologies and modern web stacks that a lot more developers are going to be familiar with. So if you can program in React or Angular or JavaScript at all, you can program a URCap.
We've already seen a ton of testimonials of people coming in and being like, “I've literally never touched a robot in my life. I have no idea about them, but I was able to bust out this

awesome piece of software for your robot that enables it to do something so cool.”
If you’re using the teach pendant, you can call up YouTube videos and load up a chat with someone from our partner Hirebotics. You can do all the cool things that were on its phone app before but now do them right in the robot.
That makes the entire development experience way better because it can share those same frameworks across everything there. There's also stuff around cybersecurity and other things.
MotionPlus and OptiMove add control
Demaitre: Another UR enhancement is MotionPlus – what does that support?
Savoia: So MotionPlus is a platform or an API [application programming interface] that we offer now. It's free if you want to use a single additional axis, so you can just download a URCap from us, but there's a cost to it if you want to control multiple accesses around the workcell.
If you look at robotic arms, a lot of times, if there’s six axes, they’ll be able to support a seventh or an eighth axis. So the robot can slide around on a rail or maybe turn a rotary stock unit when it's welding.
In almost every case, they support only the servo drives of that manufacturer. What we've done with MotionPlus is allow control through EtherCAT of many different servo brands on a very low level in a repeatable way.
You can also see how it would work with palletizing, where you can now actuate a seventh axis at the same time as the robotic arm. MotionPlus allows us to talk to other servos and to coordinate motion with any third party.
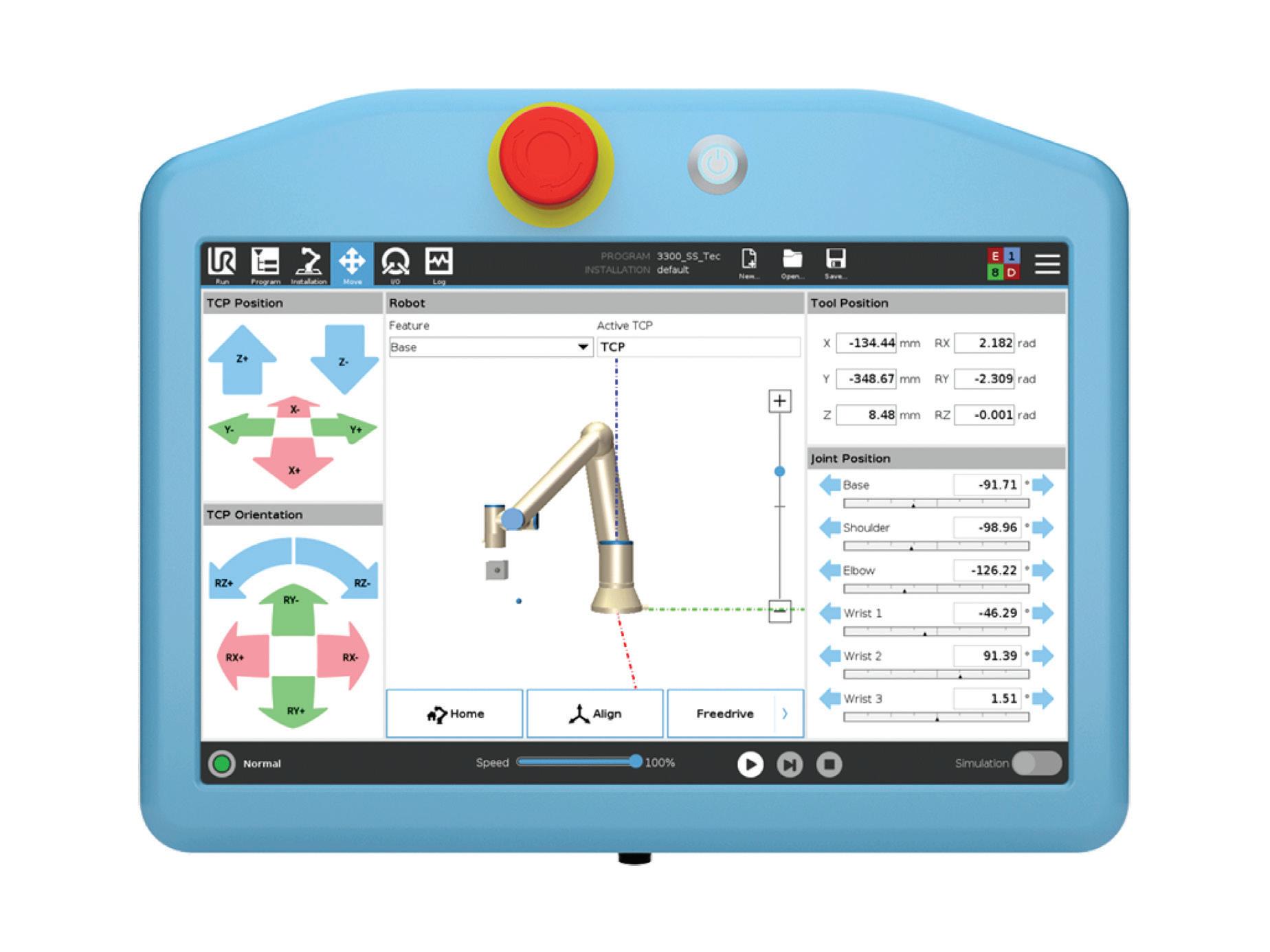
Demaitre: And what does OptiMove mean for controller optimization?
Savoia: OptiMove is one of those like sleeper features that like, unless you're picking up a teach pendant, you probably won't care about or know about. OptiMove strips away all of that tribal knowledge that comes with understanding speeds and accelerations.
And sometimes speeds and accelerations with robots are in angular
speeds and accelerations, which really are not intuitive to understand. I mean, what is 500 mm [19.6 in.] a second squared acceleration?
All those amazing UR engineers in Denmark have created a slider from 0 to 100. How fast do want to go with OptiMove? It's just going to optimize everything, taking into account payload, orientation of the robot, the safety settings, and everything like that.
Universal’s robots have an understanding of where their safety system is, what their payload is, and it'll actually govern your accelerations and speeds so that you don't trip the robot with nuisance stops. Not only does it make our robots last longer, but it also makes them a bit easier to use.
The net benefit is we've been able to do things like jerk limiting and all these derivations, like drive speed into acceleration. What that means is that the robot can pick up a heavy box easier, as the transition from zero payload to a heavy payload gets smoother. It gets more accurate and settles faster. RR

FOR THE AMERICAS UNIVERSAL ROBOTS A/S
For the full conversation, tune in to the podcast episode.

WTWH.ME/ URECOSYSTEM



While advances in humanoid robots have attracted public and investor attention over the past few years, mobile manipulation could be helping businesses sooner rather than later. Engineers have long experimented with combining collaborative robot arms with mobile platforms. In the past few months, commercial offerings have started to come to market.
The combination of lighter cobots with autonomous mobile robots (AMRs) promises greater flexibility for applications such as machine tending, piece picking, quality inspection, and surface finishing. But first, developers need to ensure that mobile manipulators have integrated controls, power management, and perception for safety.
Here are recent announcements around cobots and mobile manipulation:
In November 2024, Kassow Robots introduced its Edge Edition cobots, which are specifically designed to work with automated guided vehicles (AGVs) and AMRs.
The new cobots feature a direct DC connection from battery power, enabling them to operate while mounted to a mobile robot. They offer remote power on/off control, allowing for control from the mobile robot controllers or a PLC, said Kassow.
The Teradyne Inc. unit added that its cobots can run in automatic mode without a teach pendant, streamlining operations.
The robots have a standard footprint of 160 x 200 mm (6.2 x 7.9 in.) ensuring compatibility with various applications.
Kassow’s cobots are also equipped with sensors that detect overload, ensuring safe operation in shared workspaces. The company said this eliminates the need for special safety measures, expanding the range of applications to include repetitive, dangerous, and dirty tasks.
However, a thorough risk assessment must be conducted before deploying such robots in any environment. It should include both parts of the mobile manipulator, as well as any workpieces.
“At the end of the day, we want to make it easier for our customers to integrate cobots into mobile solutions,”
said Kristian Kassow, co-founder of Universal Robots and founder of Kassow Robots.
“A look at today’s AGVs and AMRs quickly reveals just how little space they offer. Robot controllers are mostly bulky, making it harder to automate tasks,” he told Collaborative Robotics Trends. “Our Edge Edition cobots feature a slim base. We help system integrators and end customers simplify the implementation of these AGV/AMR and cobot solutions.”
Collaborative Robotics unveils Proxie mobile manipulator
After two years of relative secrecy, Collaborative Robotics Inc., or “Cobot,” unveiled its Proxie robot late last year. Company founder Brad Porter has suggested that the kinematics of a mobile manipulator are better suited to warehouse workflows than those of humanoid robots.
At Amazon, Porter led the deployment of more than 500,000 robots as vice president of robotics and distinguished engineer. After Amazon, he said saw an opportunity to accelerate more ubiquitous autonomy through better data and tooling, leading him to join Scale AI as chief technology officer.
In April 2024, Santa Clara, Calif.-based Collaborative Robotics closed a $100 million Series A round to commercialize its technology. Porter told Collaborative Robotics Trends that Proxie is already in trials with several pilot customers, including a global logistics company.
Proxie’s mobile base is different than other AMR bases, noted Porter.
“The swerve drive gives you pseudo holonomic motion, enabling you to slide sideways into a set of shelving units. The swerve drive also enables you to snap the casters before you start to move,” he explained. “With a differential drive base, the AMR doesn’t have the degrees of freedom, so it’s more clumsy. Finally, mecanum wheels have other problems that are difficult to manage in production.”
On top of the base is a vertical linear axis that carries a dual-arm, cart-interfacing gripper for cart-moving implementations. A six-degree-offreedom (DoF) cobot arm will be an optional configuration for Proxie in the future.
Porter added that Seattle-based Cobot has a dual-arm manipulator in its lab, equipped with ALOHA grippers for manipulation tasks.
MC600 combines UR arm with heavy MiR base
Also in November, Mobile Industrial Robots ApS (MiR) announced the latest addition to its list of MiR Go-approved products, the MC600 mobile collaborative robot. It combines the MiR600 AMR with the UR20 and UR30 cobots from Universal Robots A/S (UR), which is also owned by Teradyne.
Ever since Teradyne acquired UR, MiR, and Kassow, the editors of Collaborative Robotics Trends have asked the
company when it would combine their technologies.
“While some companies have explored humanoid robots or one-off custom mobile cobot solutions for such tasks, they remain far from widespread industrial use,” stated Jean-Pierre Hathout, president of Mobile Industrial Robots. “The MC600 is ready today to safely handle these complex automation challenges.”
A unified software platform by MiR Go partner Enabled Robotics coordinates the mobile base and robotic arms. Mobile Industrial Robots said this simplifies integration into existing workflows and ensures smooth operations.
The MC600 can handle payloads up to 600 kg (1,322 lb.) and automate complex workflows in industrial environments, said Mobile Industrial Robots.
“The smaller MC250 has proven especially popular in semiconductor fabrication facilities and other lowerpayload manufacturing tasks, but there’s been a clear demand for a mobile cobot that could handle heavier manufacturing applications,” noted Ujjwal Kumar, group president of Teradyne Robotics.
Building on the success of the smaller MC250, the MC600 can handle heavier items to automate tasks such as palletizing, box handling, and machine tending, said MiR. The UR20’s extended reach allows the new robot to tackle tasks that were previously inaccessible to smaller cobots, it claimed.

The global market for mobile cobots is projected to grow 46% annually by 2030, said Odense, Denmarkbased MiR.
ASTM proposes mobile manipulation standard
With cobots being paired with mobile robots comes the need for applicable industrial standards. ASTM International’s F45 committee for robotics, automation, and autonomous systems has proposed a new standard, WK92144.
It would provide guidelines for documenting disturbances of robot arms in unstructured manufacturing environments. The proposed standard also describes an example apparatus for testing.
According to ASTM member Omar Aboul-Enein from ASTM, factors such as heavy machinery can affect these robots, especially in critical sectors like aerospace and energy that deal with complex parts.
“Many applications of mobile manipulators require high degree of position and orientation accuracy and repeatability,” he said.
ASTM International welcomes manufacturers, integrators, and end users to participate in its standards efforts. Contact the organization at its website: www.astm.org/JOIN. RR
Editor’s note: Mike Oitzman contributed to this article.

Why accept a standard product for your custom application?
NEWT is committed to being the premier manufacturer of choice for customers requiring specialty wire, cable and extruded tubing to meet existing and emerging worldwide markets. Our custom products and solutions are not only engineered to the exacting specifications of our customers, but designed to perform under the harsh conditions of today’s advanced manufacturing processes. Cables we specialize in are LITZ, multi-conductor cables, hybrid configurations, coaxial, twin axial, miniature and micro-miniature coaxial cables, ultra flexible, high flex life, low/high temperature cables, braids, and a variety of proprietary cable designs. Contact us today and let us help you dream beyond today’s technology and achieve the impossible.

