Seafloor mapping reveals New Zealand’s maritime history
Baltic shoreline monitoring with airborne Lidar bathymetry
Director Strategy & Business Development
Durk Haarsma
Financial Director Meine van der Bijl
Editorial Board Huibert-Jan Lekkerkerk, Mark Pronk, BSc, Marck Smit, Auke van der Werf
Head of Content Wim van Wegen
Copy Editor Serena Lyon
Marketing Advisors Myrthe van der Schuit, Peter Tapken
Circulation Manager Adrian Holland
Design Persmanager, The Hague
Hydro International is an independent international magazine published by Geomares. The magazine and related e-newsletter inform worldwide professional, industrial and governmental readers of the latest news and developments in the hydrographic, surveying, marine cartographic and geomatics world. Hydro International encompasses all aspects, activities and equipment related to the acquisition, processing, presentation, control and management of hydrographic and surveyingrelated activities.
Subscriptions
Hydro International is available on a subscription basis. You can subscribe at any time via https://www.hydro-international.com/ subscribe. Subscriptions will be automatically renewed upon expiry, unless Geomares receives written notification of cancellation at least 60 days before the expiry date.
Advertisements
Information about advertising and deadlines are available in the Media Planner. For more information please contact our marketing advisor (myrthe.van.der.schuit@geomares.nl) or go to www.geomares-marketing.com.
Editorial Contributions
All material submitted to the publisher (Geomares) and relating to Hydro International will be treated as unconditionally assigned for publication under copyright subject to the Editor’s unrestricted right to edit and offer editorial comment. Geomares assumes no responsibility for unsolicited material or for the accuracy of information thus received. In addition, Geomares assumes no obligation for return postage of material if not explicitly requested. Contributions must be sent to the head of content wim.van.wegen@geomares.nl.
Fugro’s Pooja Mahapatra explores the transformative impact of geodata on climate resilience and environmental sustainability. In this interview, she highlights Fugro’s advancements in ocean mapping, autonomous technologies and AI-driven solutions that are shaping the future of the geospatial industry.
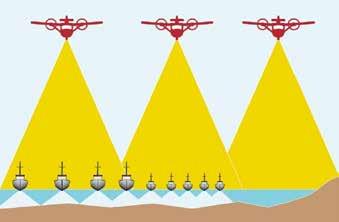
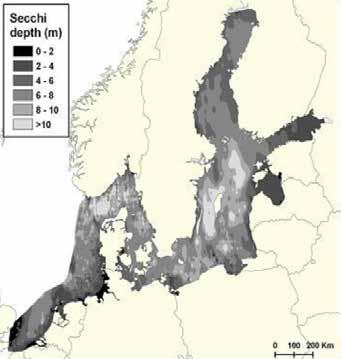
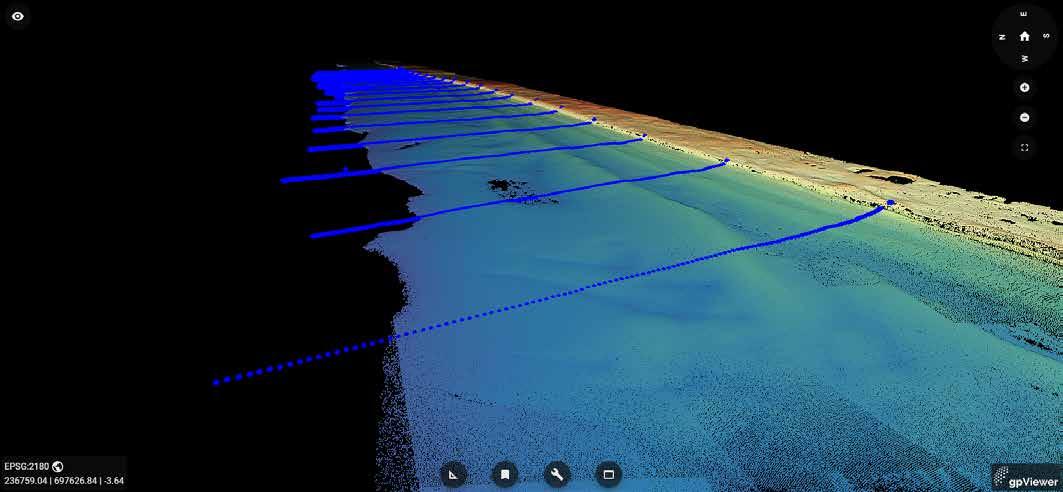
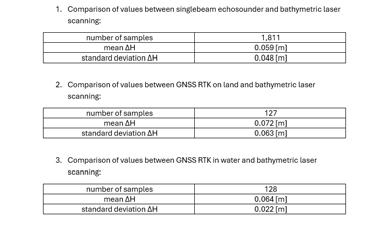
Due to the specifics of the Baltic Sea, performing accurate measurements in the coastal zone is not an easy task. For the past decade, Poland’s southern coast has been monitored using topographic laser scanners and GNSS RTK receivers. This article explores the feasibility and accuracy of using airborne Lidar bathymetry (ALB) for both seabed and land surveys.
The Seabed 2030 initiative seeks to map the entire ocean floor by 2030, with shallow-water bathymetry posing a key challenge. Mapping these coastal areas is essential for understanding land-ocean interactions. NASA’s ICESat-2 offers a solution, providing precise data for shallow waters and helping to link land and ocean maps.
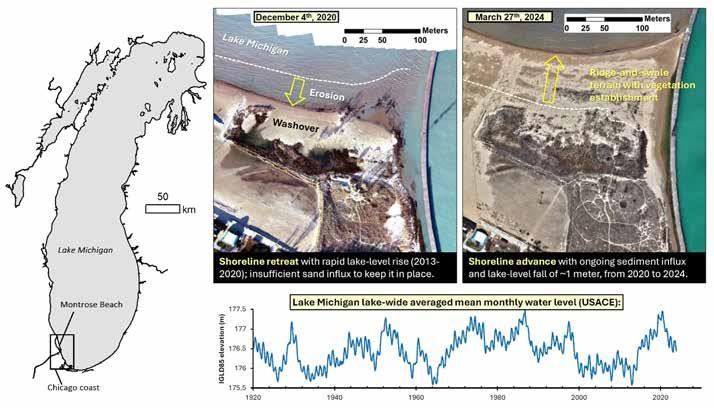
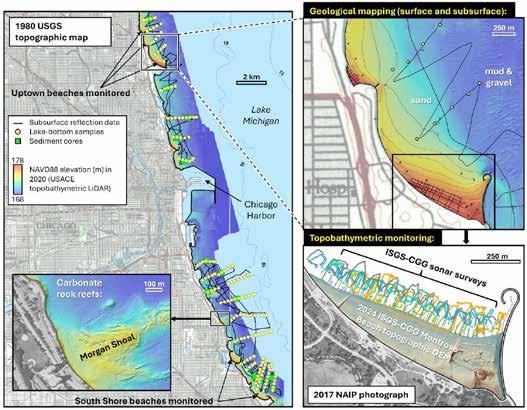
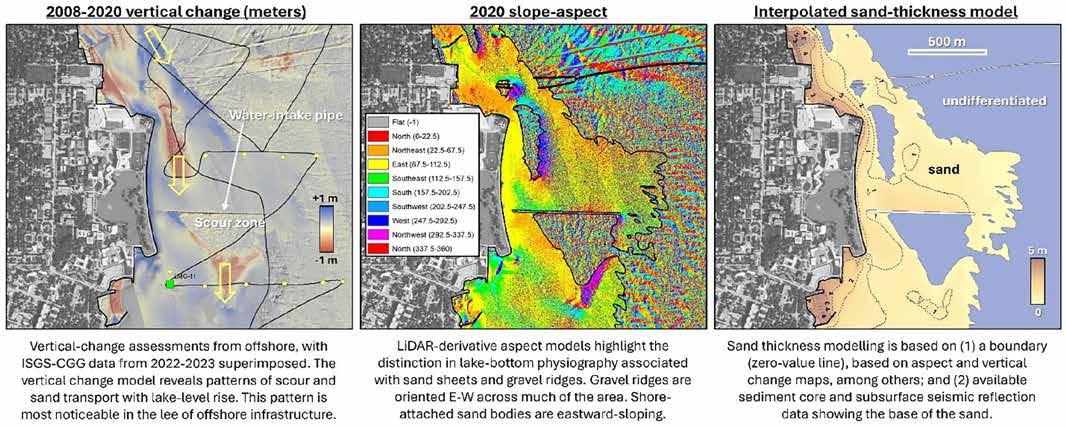
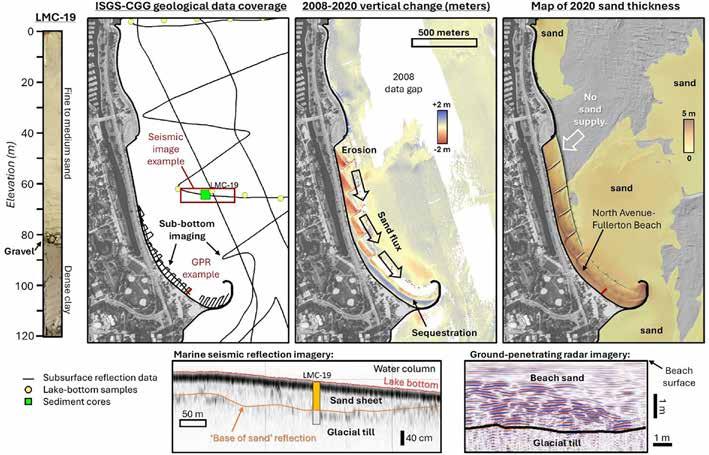
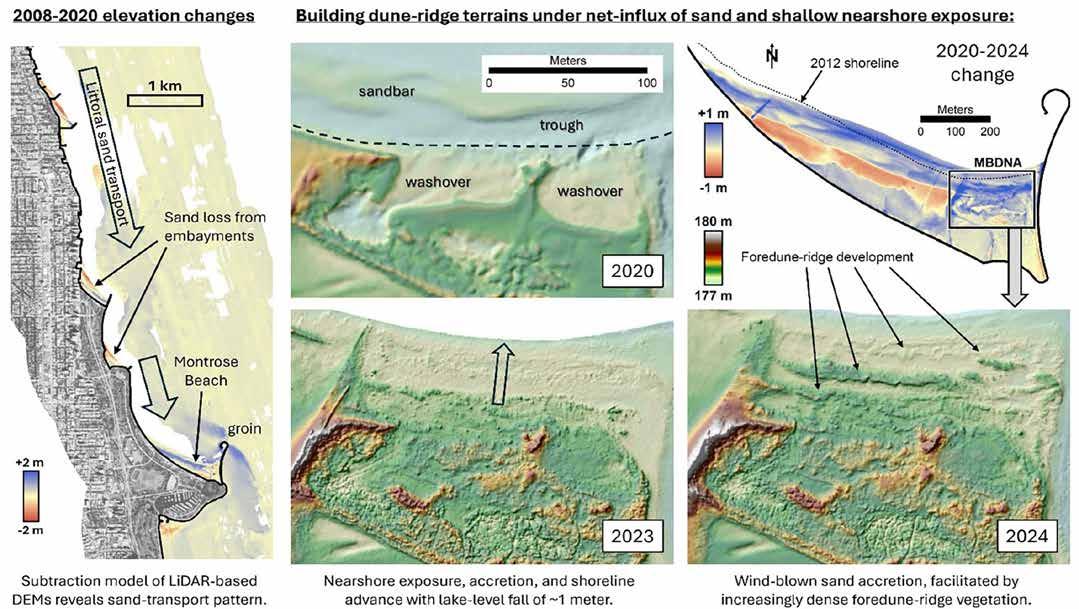
Lake Michigan’s water levels can fluctuate by up to two meters over decades, affecting coastal sediments and infrastructure in ways not fully understood. Understanding sediment transport is key to coastal resilience planning. This article highlights findings from an offshore sand assessment and beach topobathymetric monitoring along the greater Chicago coast.
Like other hydrographic offices, Toitū Te Whenua Land Information New Zealand (LINZ) collects survey data for navigation safety, maintaining nautical charts per SOLAS Chapter V, Regulation 9. A recent survey of Tūranganui-a-Kiwa/ Poverty Bay revealed two previously uncharted wrecks, mapping them in 3D and sparking interest in their histories.
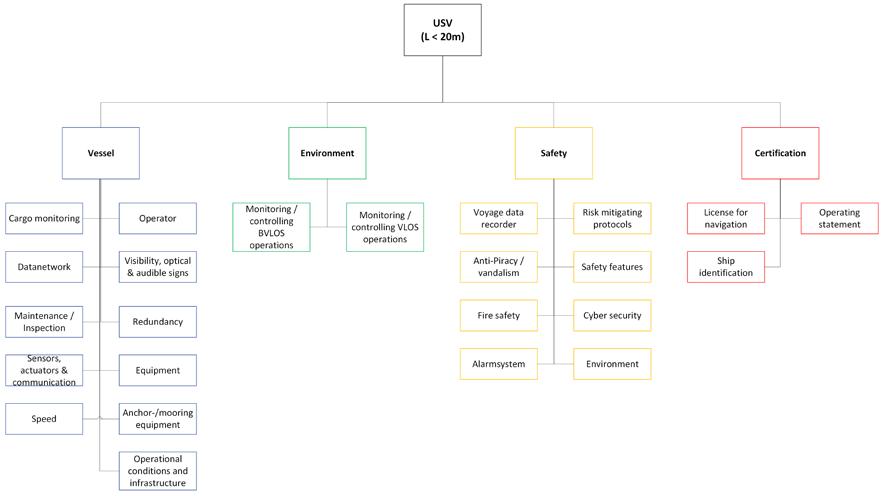
The Dutch maritime industry has prioritized the development of USVs and supporting regulatory frameworks. This partnership has enabled trial permits, allowing shipowners to test, validate, and optimize their autonomous vessels. With successful trials completed, the Dutch government is advancing toward commercial implementation.
Espresso is a free and open source software to visualize and analyse multibeam water column data. Its core feature is the capability to echo-integrate water column data vertically, allowing for the visualization ‘from above’ of georeferenced water column acoustic anomalies across multiple files.
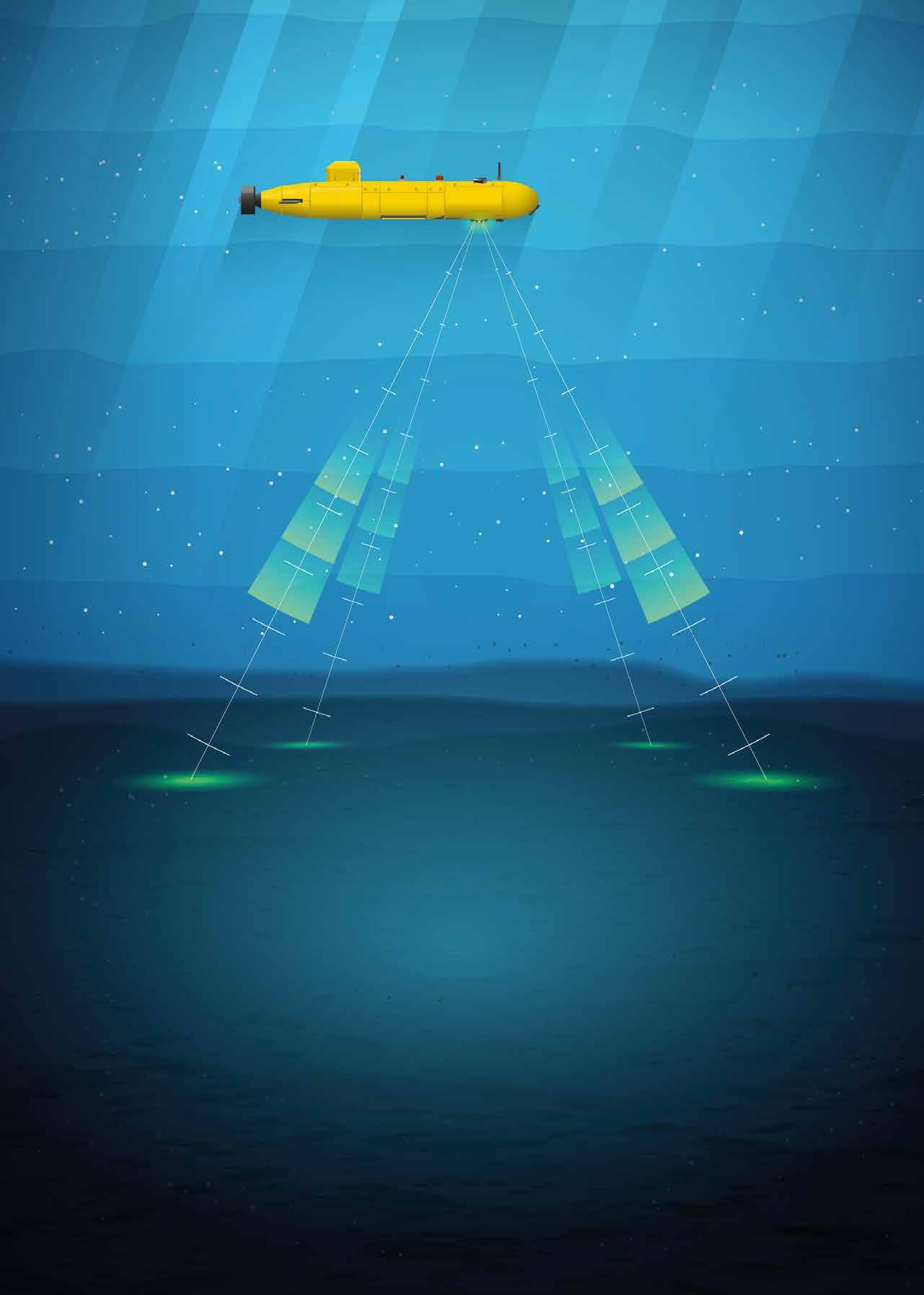
Offshore survey work has traditionally been costly and demanding. To modernize this, the National Oceanography Centre (NOC) developed the ‘NOC Autosub’ AUVs, capable of operating in deep, remote areas. The Autosub Long Range variant can work without specialist equipment or support vessels, transforming offshore surveys typically handled by crewed vessels.
Offshore surveys have traditionally been demanding, both economically and environmentally. The National Oceanography Centre (NOC) developed the NOC Autosub AUVs to address these challenges, capable of operating in deep, remote ocean areas. The Autosub Long Range variant can function without specialist equipment or a support vessel, transforming offshore work. With depths of up to 6,000m and advanced navigation systems, these AUVs are highly adaptable, carrying a range of sensors for ocean research and underwater surveying. (Image courtesy: NOC)
DRIX O-16, A NEW TRANSOCEANIC USV
A unique combination of speed, endurance, and payload capabilities.
• 30+ days endurance
• Full ocean depth payload sensors
• Dual hybrid propulsion
• ROV, ROTV launch & recovery
• Redundant architecture
Challenges ahead
As I write this editorial, I have just been through a couple of very busy weeks. It was the start of the new school year, with a first run of the MIWB Hydrographic Surveying and Marine Geodesy minor, as well as our more internal Sustainable Offshore and Dredging Operations and Sustainable Use of Oceans and Seas minors. I also attended World Port Days in Rotterdam, an annual three-day festival for the maritime industry. Thanks to Rijkswaterstaat, the MIWB was able to promote hydrography in general and our Cat-A course in particular.
The common thread across these events is the realization how few people are aware of our beautiful profession and its relevance to all activities on, under and around the waters of the world. But also, how traditional we are. At the start of our ‘sustainable’ minors, a summer school was held during which the students were confronted with the efforts of industry (both surveying and general maritime) to become more sustainable.
Despite good will, some of the students concluded after that week that sustainable is not as easy as it may seem. Yes, we are getting there, but efforts are relatively small and not always very visible. Take construction: battery-operated backhoes exist, but how do you recharge them in a coastal construction project? And what if they run out of juice halfway through the day? Diesel generator backup? Not really sustainable, is it?
Sea Ranger Service gave a guest lecture about surveying with a sailing vessel. They ran some tests, and mounting an MBES, IMU and RTK dGNSS on a 20-metre sailing vessel is a challenge if you have never done it before (although all in a day’s work for many hydrographic professionals). Getting 200% coverage is more challenging and running your lines parallel to the contours or objects even harder, as the wind dictates much of operations. I was reminded of this during a sailing trip with our minor students as part of the same summer school. We went out on the motor, then attempted
to sail back but soon found that there wasn’t much wind and had to drift back on the tidal current. No little thanks to the bar opening, the trip was a success, but to say it went according to plan…
At the World Port Days in Rotterdam I had a good look around at the sustainable operations going on. Apart from a dredging vessel on LNG, most efforts tended to focus on general housekeeping (garbage separation, less plastic) and cleaner fuels. While discussing this with the students promoting their study, some of whom had just been on the summer school, the term ‘green washing’ did come up. That may seem a bit strong considering all the effort being made, but we are just starting to become sustainable and still finding our way.
Which brings me to the theme of this issue: autonomous and unmanned. While underwater this is and has been the standard for years, above water we are still running into blockades. Some are technical (sensors, automation), some security (hacking), and some legal (not allowed to go unmanned). When I talk about autonomous surveying I don’t mean ‘pressing the button’ – that has been automated for years. Even changing lines and keeping the vessel on line was automated long ago (I remember taking part in successful trials in 1999). In my opinion, the big challenge is ‘fault finding’ if the data is not as expected and setting the equipment correctly. Yes, MBES can change range and filter automatically, but if you have been out there you know that this is not faultless. And then something happens and all of a sudden data quality drops. The why is usually the issue. Could AI cover that? Perhaps in the future, but not today. And what about autonomous surveying in the most challenging environments with changing morphology, sand banks all around and significant tides? We will get there someday (probably) but there are still many issues to solve.
But then, as a hydrographic surveyor, isn’t that what we profess we do not want to happen but gladly dive into when it does? Isn’t problem solving one of a surveyor’s main competencies? Challenges ahead!
Huibert-Jan Lekkerkerk technical editor, Hydro International info@hydrografie.info
OceanAlpha embarks on a year-long USV showcase in the Middle East
OceanAlpha has announced its year-long showcase of its cutting-edge uncrewed surface vessels (USVs) across the Middle East region, beginning in Doha, Qatar. This will specifically target the offshore oil and gas sector, offshore wind sector, marine survey companies, maritime enforcement authorities and fishery management departments. This initiative is designed to offer potential users an in-depth, hands-on experience with OceanAlpha’s advanced USV products, solutions and applications.
Mr Pinestone Shi, general manager, OceanAlpha, said: “We are extremely excited to introduce our innovative uncrewed marine technology to the Middle East. The region’s thriving maritime market and challenging environments provide the perfect backdrop to showcase the performance of our vessels. Our goal is to engage with industry professionals, address their specific needs, and demonstrate how our USVs can enhance operational efficiency, safety and environmental sustainability.”
The tour will feature a range of uncrewed vessels, including the M75 uncrewed patrol vessel, the L25 uncrewed marine survey vessel, the SE40 uncrewed water sampling and monitoring vessel and the Dolphin 3 intelligent remote-controlled lifebuoy. The tour will kick off in Qatar, with the M75 as the centrepiece. Its capabilities will be demonstrated from 22–31 December 2024 in Doha’s nearshore water. Designed to handle the demanding conditions of offshore oil and gas platforms, the M75 features a robust design and advanced autonomous navigation technology, allowing for remote operation that minimizes personnel exposure and significantly reduces operational costs.
Transoceanic DriX christened in La Ciotat
The new DriX O-16, produced by Exail, was christened last week in a ceremony attended by many officials and co-workers in the harbour of La Ciotat. The transoceanic DriX O-16, the latest addition to the DriX series of unmanned surface vehicles (USVs) produced by the French company, was introduced to the public at Oceanology earlier this year.
Exail’s new USV is the largest DriX so far – at 15 metres – and differs from family members in its sea handling and high sensor integration capacity. It is also transoceanic; it can run 30 days non-stop, travelling up to 3,500 nautical miles. The USV can launch ROTVs and ROVs, has increased sea handling, and has dual hybrid propulsion, whereby the combustion engine is extremely efficient. The O-16 is especially focused on deep-water hydrography and is therefore believed to be a gamechanger for survey and seabed mapping, speeding up and enlarging projects under difficult circumstances and remote locations, and so allowing them to be completed with fewer people in the same time frame. The press had the opportunity to watch the DriX in action – under almost ideal circumstances – in La Ciotat bay and was given a tour of the DriX production facility at the naval yard of its home base on the Mediterranean. A report on the christening of the DriX O-16 and recent developments at Exail will be available on the Hydro International website, hydrointernational.com.
new transoceanic USV, the largest DriX so far at 15 metres, stands out from its predecessors with superior sea handling and high sensor integration capacity.
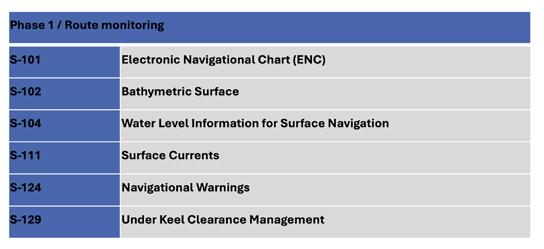
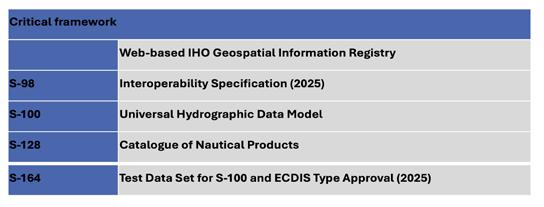
SevenCs rolls out improved S-100 data management system
SevenCs, a leading provider of maritime navigation software solutions, has unveiled the latest version of its S-100 Data Management System (SDMS). This system delivers comprehensive workflow management for chart validation and supports S-100 data authentication, offering hydrographic offices enhanced quality assurance and ensuring compliance with the new industry-wide S-100 standards.
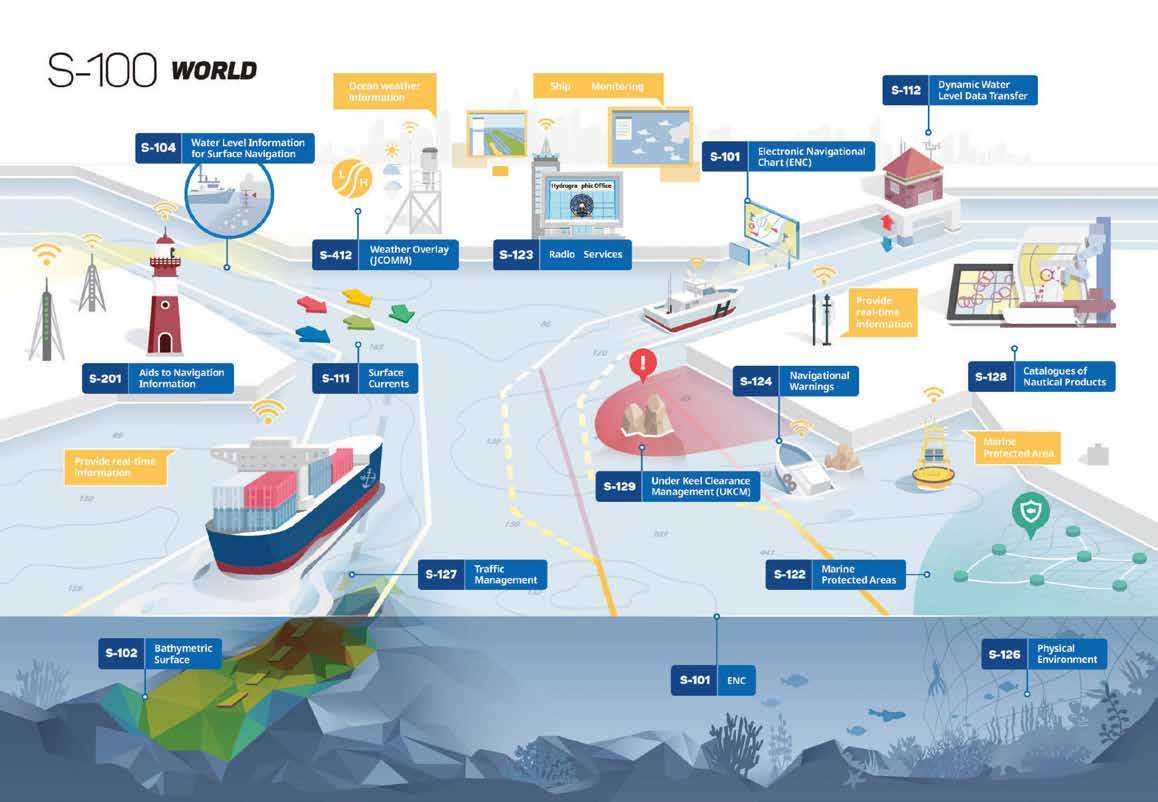
The S-100 framework, developed by the International Hydrographic Organization (IHO), supports the creation and implementation of digital hydrographic data products and services. More flexible and extensible than its predecessor, the S-57 standard, it accommodates a wider range of hydrographic, maritime and geographic data types.
The SDMS ensures consistency in the management of S-57 and S-100 data, offering predefined modular workflows that align with IHO standards and meet the specific needs of individual hydrographic offices. With a scalable and modular design, the system is adaptable to evolving industry requirements, allowing for future extensions.
New version of the SevenCs S-100 Data Management System. (Image courtesy: SevenCs)
The M75 combines a durable design with autonomous navigation, enabling remote operation that lowers personnel risk and reduces costs. (Image courtesy: OceanAlpha)
Exail’s
Plymouth Marine Laboratory joins Seabed 2030 to boost ocean knowledge
The Nippon Foundation-GEBCO Seabed 2030 Project has announced a new partnership with Plymouth Marine Laboratory (PML), a prominent marine research institute in the UK. PML is renowned for its leadership in various international initiatives, especially those related to climate change, biodiversity, cleaner seas and sustainable ocean management. This collaboration aims to enhance our understanding of the ocean and contribute to the goal of achieving a fully mapped seafloor.
PML’s extensive multidisciplinary research projects and its collaboration with both national and international partners align with the objectives of the UN Decade of Ocean Science for Sustainable Development. Through these efforts, PML is dedicated to deepening our knowledge of the marine environment to support the development of well-informed, science-based solutions.
Seabed 2030, a joint effort by The Nippon Foundation and GEBCO, aims to map the entire ocean by 2030 and integrate the data into the GEBCO Ocean Map. Endorsed as a Decade Action of the UN Ocean Decade, the project is aligned with PML-led initiatives such as the Atlantic Meridional Transect. GEBCO, a programme of the IHO and IOC, holds the unique mandate to chart the entire ocean floor.
Jamie McMichael-Phillips, project director of Seabed 2030, said: “Partnering with Plymouth Marine Laboratory is a significant step forward in our mission to map the entire ocean floor. PML’s commitment to excellence in marine research, particularly within the framework of the Ocean Decade, ensures that we not only expand our understanding of the ocean but also support global efforts to manage and protect it.”
Ocean Data Collection With Less Risk, Lower Costs and Zero Emissions
SeaTrac’s SP-48 USV is proven for maritime observation, data collection and reconnaissance. Powered by the sun with high-reserve batteries, it operates in nearshore and offshore environments through varying conditions. SeaTrac’s USV executes programmed missions that can last up to several months. Users monitor and update missions on demand, supporting human-inthe-loop remote operations. The USV includes built-in sensors and supports a wide range of payloads. It is configured with redundant communication links for basic inshore and over-the-horizon operations, with additional options available. SeaTrac’s Dashboard Control Software allows pilots to manage data flow based on mission needs and optimize available power in fluctuating environments.
https://www.seatrac.com/
Jamie McMichael-Phillips, Seabed 2030 project director (left), and Professor Icarus Allen, chief executive of PML, sign the Memorandum of Understanding.
Icebreaker Oden makes landmark journey to isolated fjord in North Greenland
The 2024 GEOEO North of Greenland Expedition, organized by the Swedish Polar Research Secretariat aboard the icebreaker Oden, has made history as the first vessel to reach the remote Victoria Fjord in North Greenland. The expedition’s data will be contributed to The Nippon Foundation-GEBCO Seabed 2030 Project, which aims to inspire a complete map of the ocean floor by 2030.
Setting sail from Thule, the northernmost deep-water port, the expedition focuses on assessing the Victoria Fjord region to understand how much and how quickly the North Greenland ice sheet could contribute to global sea-level rise. Despite facing multi-year sea ice and pressure ridges, the vessel succeeded in reaching the fjord with 40 researchers aboard from Sweden, the USA, Denmark, Australia and Switzerland.
Among the expedition’s leaders are professors Martin Jakobsson and Larry Mayer, co-heads of Seabed 2030’s Arctic and North Pacific Ocean Regional Center. Jakobsson and Mayer are leading the team’s geophysical mapping efforts, which aim to enhance understanding of this remote region and its relevance to global climate change and sea-level studies. The mission is expected to significantly advance knowledge about the Arctic, with far-reaching implications for climate research and environmental preservation.
The GEOEO theme is organized around seven broad scientific goals, which will be addressed by several complementary work packages before, during and after the expedition.
Danish Geodata Agency rolls out upgraded depth model
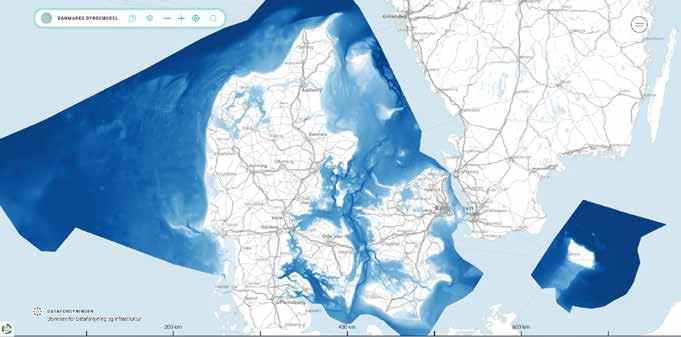
The Danish Geodata Agency has just unveiled Denmark’s Depth Model (DDM) version 2.0, now offering improved data coverage and incorporating brand-new data sources. Two years after launching the original DDM with a 50-metre resolution, the agency is proud to present this enhanced edition.
The depth model remains at a resolution of 50 metres, but data from entirely new sources has been integrated into the new version. This means that some of the depth data now also comes from satellites and airborne laser (Lidar) – particularly in the shallow areas near the coast. In addition, much data has been collected through crowdsourced bathymetry (CSB), which has contributed to better data coverage, also in deeper waters. An advantage of CSB is that data is collected from ships already operating at sea. Thanks to the European collaboration EMODnet Bathymetry, the transition at national marine borders has been greatly improved, providing clearer and more consistent coverage at the edges of Denmark’s exclusive economic zone (EEZ) in the new model. Additionally, the new version features a reduction in interpolated data by about 5%. This means that areas where depths were once estimated based on informed assumptions have been replaced with more precise measurements.
It is not just the quantity of data that has increased; the data is now unified under a single vertical reference, or datum. This consolidation results in more uniform depth measurements, eliminating significant discrepancies between datasets.
The icebreaker Oden in the Victoria Fjord during the North of Greenland 2024 expedition. (Image courtesy: Martin Jakobsson)
Screenshot of Denmark’s Depth Model (DDM) version 2.0. (Image courtesy: Danish Geodata Agency)
Interns map 39,000km² of seafloor for Seabed 2030
Six students took part in a summer-long paid satellite-derived bathymetry (SDB) internship facilitated by TCarta and hosted at the Marine Institute (MI) of Memorial University in St. John’s, Newfoundland. All participants were either recent graduates or current students in the MI Ocean Mapping programme. The programme’s mobilization was a collaborative effort among TCarta, Memorial University and The Nippon Foundation-GEBCO Seabed 2030 Project, which aims to inspire the complete mapping of the seafloor by 2030.
As the second annual internship concludes this week, the student interns have successfully produced 39,304km² of 10m-resolution SDB across four areas of interest worldwide, all within just eight weeks. The SDB was generated for the coastlines of Somalia, the Mosquito Coast, the Galapagos and the islands of the Lesser Antilles. This bathymetry will be contributed to the Seabed 2030 initiative, just as last year’s internship results from Madagascar, Newfoundland and the Canadian Arctic were.
During the summer, students were equipped with essential hydrographic skills. They were introduced to a range of satellite imagery options for SDB and learned to evaluate the strengths of each for various project applications. TCarta provided training on using a pre-processing tool to prepare in situ data from sonar or Lidar, which served as calibration datasets for processing satellite images. Additionally, the students were taught how to apply an enhanced version of a traditional band ratio algorithm alongside a machine learning algorithm in iterative processes to derive water depth measurements from individual image pixels.
Six Marine Institute summer interns, along with two TCarta employees and one Marine Institute staff member, mapped nearly 40,000km² of seafloor.
Sea lions help scientists map southern Australia’s seafloor
In southern Australia, scientists have enlisted an unexpected team of helpers to map the ocean floor – and the sea lions have done their job well. Six different marine habitats were captured – including algal meadows and reefs – that make up southern Australia’s seabed, researchers report in a recently published study.
Our understanding of seabed habitats is limited, but video data from remotely operated vehicles and underwater cameras is starting to fill the gaps. However, these vessel-based surveys are time-consuming, expensive and challenging, especially in remote or deep-sea areas. To tackle this, an Australian research team devised an innovative solution that exceeded expectations. The researchers fitted small, lightweight video cameras and movement trackers on eight adult female Australian sea lions. The team had two goals: to understand the habitats and food critical for the endangered species, and to map the little-known seafloor off southern Australia’s coast.
In this fascinating study, high-definition colour video was captured by sea lions as they swam in the ocean, diving to depths greater than five metres during daylight hours. These cameras, attached to the sea lions, had batteries that allowed for 12–13 hours of total filming, spread over two to three days. This footage provided scientists with valuable insights into underwater habitats.
EMPOWERING
World leading electric underwater robotics
Seaeye eM1-7 Electric Manipulator
Researchers equipped Australian sea lions with small, lightweight video cameras and movement trackers to assist in mapping the seabed. (Image courtesy: Rich Carey/Shutterstock)
Autonomous
technologies, ocean mapping and AI for a sustainable future
Unlocking the power of robotics and automation
By Wim van Wegen, Hydro International
Dr Pooja Mahapatra, principal advisor for climate & nature at Fugro, explores the transformative impact of geodata on climate resilience and environmental sustainability. In this interview, she highlights Fugro’s advancements in ocean mapping, autonomous technologies and AI-driven solutions that are shaping the future of the geospatial industry. With a background in satellite earth observation, Dr Mahapatra shares her vision for harnessing technology to meet global challenges and Fugro’s commitment to a more sustainable, data-driven future.
Fugro has been a leading supporter of The Nippon Foundation-GEBCO Seabed 2030 Project since its early planning stages. With only 25% of the world’s oceans mapped, do you believe the 2030 deadline is still feasible, and what further steps are necessary to make significant strides?
There has been great progress to date, not just in coverage – which stood at 6% when the project started – but also in awareness. Bathymetry is fundamental to understanding our ocean and safeguarding the planet. That message is catching on, as evidenced through an increase in project partners, data contributions and crowdsourced bathymetry initiatives.
Having said that, completion by 2030 is extremely ambitious, but feasible with technology such as uncrewed surface vessels (USVs) and remote operations, as well as accelerated commitment and support from governments, the private sector and philanthropic organizations.
We are continuing to push forward on the private sector side. In addition to Fugro vessels contributing more than 2.6 million square kilometres of bathymetry while transiting between projects, we are also co-chairing a working group with the Intergovernmental Oceanographic Commission of UNESCO to increase private
sector data sharing. This working group is connected to the United Nations Decade of Ocean Science for Sustainable Development.
Capturing the physical environment in high precision generates a vast amount of data. What advancements do you foresee in managing and utilizing this data effectively?
Whether it is bathymetry, geospatial or metocean data, several tech innovations are helping to speed up the acquisition, analysis and delivery of this data to where it is needed. One of these has been around the improved connectivity and bandwidth linking vessels at sea with teams onshore. Large volumes of data can now be rapidly transferred to Fugro’s global network of remote operations centres (ROCs) for processing and analysis, rather than waiting for a vessel to return to port before this data is shared.
More digitalized processes to manage in real time the progress of data through the workflows involved in data collection is also helping to deliver the insights that clients need for projects more quickly. Being able to move more roles from offshore to onshore positions in ROCs is also allowing the industry to attract and retain a more diverse workforce – not just those willing to work offshore for around 180 days a year.
Finally, advancements in artificial intelligence (AI), machine learning (ML) and cloud technologies are crucial for managing and utilizing the vast data generated from high-precision environmental capture. AI and ML can automate data processing and provide advanced, real-time analytics, uncovering patterns and making predictions. Cloud platforms offer scalable storage and powerful on-demand computing, enabling global accessibility and collaboration. Integrating edge computing allows for local data processing, reducing latency and bandwidth needs. AI-driven data management enhances organization, security and compliance, while intuitive dashboards and immersive visualization tools improve user interaction and decisionmaking, leading to better outcomes in applications such as smart cities and environmental monitoring.
How is Fugro integrating remote and autonomous technologies in its surveying practices to shape the future of the industry?
USVs with an electric remotely operated vehicle (eROV) onboard, controlled remotely by an onshore operative, play an important role in the future of the maritime sector. The eROV functions in water depths as deep as 450 metres and both systems can spend up to two weeks conducting offshore inspections without the need to
be refuelled. This makes them increasingly suitable to carry out many of the duties and projects that would traditionally be tackled by conventional large and fuel-heavy survey vessels staffed by an extensive crew.
By eliminating the need to deploy crew in sometimes unpredictable and harsh marine environments, as well as being significantly more fuel-efficient and hence causing considerably lower emissions, these remote vessels will help Fugro to reach our net zero carbon emission operations (scope 1 and scope 2) by 2035 ambitions. Their ability to deliver early insights and real-time results more quickly, meanwhile, helps meet the increasingly tight turnarounds and targets that clients are facing with projects.
Some argue that USVs and marine autonomy are limited to safe areas away from hazards. How does Fugro address this concern?
Marine law has been centuries in the making, and the prospect of autonomous vessels represents a huge shift in the foundation of how these regulations are drafted and applied. A vast array of overlapping regulations and territory-specific legalities means that it can take years to introduce and amend legislation.
As that work continues around the world, many authorities have implemented interim policies which can include things such as restricted operational areas or mandating the presence of guard
vessels. Companies such as Fugro continue to engage with marine authorities to make progress – and to give one example, the latest Blue Essence® autonomous vessel earned Category 0 approval from the UK Maritime Coastguard Agency, the highest level of approval for autonomous vessels. This allows unrestricted access to UK waters for fully remote operations, and as the number of successful projects, use cases and proof points continues to grow, no doubt we will see similar legislative progress made in other territories around the world.
AI is becoming an integrated part of surveying. How is Fugro leveraging AI technologies in its operations?
AI holds a great deal of potential for our operations, including surveying work. A good example is Sense.Lidar®, which integrates AI, ML and cloud processing to classify Lidar point clouds rapidly and accurately. This technology enhances the quality and speed of data classification, reducing costs and improving decision-making capabilities. By using AI for automatic classification, we provide highly detailed and accurate geospatial data, enabling better management and analysis of natural and built environments for applications such as urban planning, flood risk management and infrastructure monitoring.
Fugro and its partners are also leveraging AI to detect biodiversity from underwater images by utilizing machine learning algorithms to analyse visual data collected by underwater cameras and
ROVs. These AI-driven systems can identify and classify various marine species, monitor habitats and assess biodiversity with high accuracy and efficiency. This automated approach supports marine conservation efforts and our clients’ biodiversity net positive ambitions by providing detailed insights into the health and diversity of aquatic ecosystems.
As someone with a background in electrical engineering and satellite earth observation, how do these areas of expertise assist you in your role as principal advisor – climate & nature at Fugro?
Electrical engineering has equipped me with a solid foundation in technical problem-solving and a deep understanding of remote sensing technologies, which are essential for analysing environmental data. My experience in satellite earth observation, particularly through my PhD, allows me to harness advanced geodata techniques to monitor and assess climate impacts and biodiversity.
Working at the intersection of geodata and environmental stewardship, I apply these technical skills to develop innovative solutions for climate resilience and nature conservation. This involves leveraging cutting-edge technologies to capture highprecision environmental data, which is critical for projects in the domains of coastal resilience, ocean health and inland water management. My experience enables me to provide the most fit-forpurpose solutions for our clients, facilitating data-driven decisionmaking in the face of environmental challenges.
At Fugro, I am fortunate to bring together my passion for technology and desire to contribute to our planet’s well-being. My role allows me to integrate advanced geodata methods with practical applications, creating solutions that address climate change and biodiversity loss, ultimately making a tangible impact on the world.
As a proud supporter of diversity, inclusion and women in STEM, what is the current state of the geospatial industry, particularly in the hydrographic sector and adjacent fields?
With roots in naval research, some historic assumptions about hydrography persist; namely that it is men that will be deployed
on these kinds of projects. The reality is however that women have worked in this field for hundreds of years. Progress has been made around encouraging women to enter hydrography as a career –but work still needs to be done to ensure that the onboard vessel experience is inclusive, even down to things as basic as making sure everyone on board has personal protection equipment and clothing in their size.
At the other end of the spectrum, for those entering the workforce, often half the battle is being aware of what’s out there – so the industry must continue to engage with those right at the start of their careers and open up opportunities for their workforce to share their stories and serve as role models.
There is thankfully a growing effort to create more inclusive environments and opportunities for women and underrepresented groups. Fugro and other organizations are implementing policies and initiatives to foster diversity, such as mentorship programmes, inclusive hiring practices and professional development opportunities. This shift is not only improving the workplace culture but also driving innovation and enhancing the industry’s ability to address complex global challenges effectively.
The shortage of skilled young professionals is a concern in the geospatial and hydrographic sector. What strategies do you believe can address this issue?
One of the main ways in which we at Fugro are addressing the ongoing talent shortage challenge is by harnessing the impact of remote and autonomous operations. By being able to shift more of our day-to-day work onshore to an ROC, we can offer a better worklife balance from a traditional vessel-based operation where you could be deployed at sea for weeks at a time. It is this that we think will help drive the next generation of professionals to this sector.
As more advanced automated systems and robotics are deployed, Fugro has a programme for up-skilling and re-skilling people so that they can adapt to this shift. The process diversifies the workforce, because you need people skilled in the marine environment in terms of the inspection techniques but also in IT and remote software development.
Fugro has been involved in the development of renewable energy projects globally. What is your vision for the zeroemission energy sector, and how does Fugro contribute to it?
To reach the ambitious targets that governments across the region have set around clean energy capacity, the sector will need to focus much more on the speed at which it can develop projects and gain the necessary consents and investment.
It will require closer collaboration and data sharing between the various players in the supply chain to reduce offshore wind’s levelized cost of energy (LCOE). Fugro’s role in this is in improving the quality and speed of the data available on the natural environment of a proposed site – and delivering confidence and reassurance to investors that a project is viable in the process. Reducing risk is the name of the game – and Fugro’s deep geodata insights and capabilities have a big part to play in this.
How is Fugro actively working to reduce its own carbon footprint in line with sustainability goals?
Fugro recognizes that companies play an important role in the required reduction of greenhouse gas (GHG) emissions. Already in 2019, Fugro started to set ambitious emission reduction targets for our scope 1 and 2 emissions. This resulted in Fugro announcing in early 2021 its target to become net zero by 2035, covering all direct and indirect emissions from its operations (scope 1 and scope 2).
To support this and demonstrate our corporate responsibility, Fugro committed to setting science-based targets for its absolute GHG emission reduction. Science-based targets provide companies such as Fugro with a clearly defined path to reduce emissions in line with the Paris Agreement goals and aligned with the latest scientific consensus on the need to limit global warming to 1.5°C above preindustrial levels. In early 2024, the Science Based Targets initiative (SBTi) validated Fugro’s science-based net zero emission reduction targets covering all scope 1, 2 and 3 emissions.
For our marine vessel fleet, this will be achieved through a combination of more efficient modes of operation and battery hybrid or green methanol power conversions, as well as switching to deployments of smaller USVs with significantly lower energy demands.
In what perhaps unexpected ways do you foresee geospatial and hydrospatial data being utilized to address societal challenges?
An increasing problem for many island nations around the world is coastal resilience, particularly in the face of climate change and environmental threats. Joined-up data is needed to monitor and measure these challenges that threaten coastal communities, as well as support the use cases for nature-positive investments.
To give one example, Fugro has partnered with the Ocean Risk and Resilience Action Alliance (ORRAA) to help address these issues,
About the authors
Dr Pooja Mahapatra
Dr Pooja Mahapatra is an experienced geospatial expert with a passion for using technology to address global challenges. She is currently the principal advisor for climate & nature at Fugro, focusing on climate resilience and biodiversity applications. She holds a PhD in satellite earth observation from the Delft University of Technology and worked in diverse organizations –start-ups, research institutes, space agencies and large multinationals –prior to joining Fugro. She is a board member of the World Geospatial Industry Council and the graduate geospatial educational programme at the University of Twente. She is a recognized thought leader in the field and the recipient of several awards, including the Geospatial World’s ‘50 Rising Stars’ in 2022.
alongside supporting the Coastal Risk Index (CRI) with our coastal and oceanographic data. The CRI is an open source platform providing flood maps and data to help policymakers, insurers and investors to make informed decisions about their risk and resilience strategies.
Is there anything else you would like to share with our audience regarding Fugro’s initiatives or the future of the industry?
Fugro is deeply committed to sustainability and climate resilience, leveraging its extensive geodata expertise to mitigate climate change risks and support ecosystem preservation. A prime example is the groundbreaking seagrass mapping project around Italy, which aims to restore vital marine ecosystems. This project highlights the importance of detailed environmental data in driving effective restoration efforts and supporting biodiversity.
Additionally, Fugro’s involvement in global ocean science initiatives emphasizes the critical need for data sharing between the private and public sectors to enhance our understanding of the ocean’s health. By focusing on key areas such as coastal resilience, ocean health and inland water management, Fugro is not only expanding its business but also making a valuable contribution to global sustainability goals. This strategic direction aligns with increasing investments from governments and international institutes aimed at adapting to climate change and protecting natural environments. Fugro’s holistic approach, combining advanced mapping, modelling and monitoring techniques, ensures that both natural and built environments benefit from its innovative solutions, driving natureinclusive development and safeguarding our planet for future generations.
Water-penetrated photons from ICESat-2 green laser enable practitioner-friendly methods for shallow-water bathymetry
By Giribabu Dandabathula, Omkar Ghatage and Subham Roy
The Seabed 2030 initiative, anticipated to be a game-changer in ocean sciences and marine navigation, will map the ocean floor by 2030. Shallow-water bathymetry is a critical part of the Seabed 2030 ambition, but remains a gap that shipborne echosensors fail to address. Shallow water at the coasts is the interface between land and water, and its mapping is of the utmost importance for understanding ocean-land interactions and their interplay. A spin-off from the science objectives of NASA’s ICESat-2 is the potential to derive bathymetry for shallow waters with high precision; thus, ICESat-2-based seafloor data has the potential to connect the land and ocean maps.
The shallow waters along our coasts act as a buffer between the ocean and land. Depths of the shallow water get attenuated due to the wave energy dissipation through seabed friction. Mostly, they are in the epipelagic zone, permitting sunlight to reach the seafloor’s bottom. Shallow waters therefore provide a rich environment for many organisms, including fish, corals, sea turtles and mammals. They also regulate climate variables by processing nutrient effluence from land and anthropogenic emissions. For marine navigation, seafloor depth information in shallow water areas is crucial for manoeuvrability and safety issues. Therefore, high-precision bathymetric data for shallow waters is of immense use in many areas, including earth sciences and the understanding of benthic structures.
The challenges of mapping shallow water depths
Determining the depth of shallow water at less than 20 metres is generally challenging if relying on hull-mounted sensors, as the acoustic signals get distorted, impacting the measurement accuracy. Moreover, shallow water may pose manoeuvrability challenges
for the ship. Applications of optical remote sensing-based methods for mapping shallow water depth are still in the validation stage, and the outputs are generally empirical; furthermore, these remote sensing methods need seed points as input during bathymetric modelling. Signals from nonimaging active sensors such as Lidar can penetrate water up to a certain depth before being attenuated, and can therefore aid in generating bathymetric information, especially in shallow waters. However, the more sediment in the water, the more the light attenuates due to scattering or absorption before reaching the seabed; thus, it is advised to acquire Lidar data during periods of reduced sediment load.
Harnessing the water penetrability of ICESat-2 green lasers for shallow water bathymetry
NASA’s ICESat-2, a novel satellite with a solo sensor – ATLAS – was launched in September 2018 and has been operational ever since. ICESat-2 is unique in providing measurements every 0.7m along the track. Combined with ICESat-2’s precision pointing and positioning information, the range
measurements produce geolocation and elevations for all the successful laser photon returns from the Earth’s surface. A sequence of geolocated photons is of immense use to study the Earth’s surface features through profiling. In the first five years after the launch of ICESat-2, numerous research areas in the earth sciences reported the significance and application capability of geolocated photon data – in fact, the geolocated photon data from ICESat-2 not only filled gaps in the geospatial technologies but also unleashed novel applications for earth sciences. Even though the science objectives of ICESat-2 are oriented towards observing the cryosphere, researchers have successfully used the geolocated photons in a variety of disciplines related to land, ice, sea ice, vegetation/canopy, inland surface water and atmospheric studies in combination with optical remote sensing data. Researchers have successfully validated the application of ICESat-2 photon-based water-level measurements with the highest accuracy for various inland water bodies.
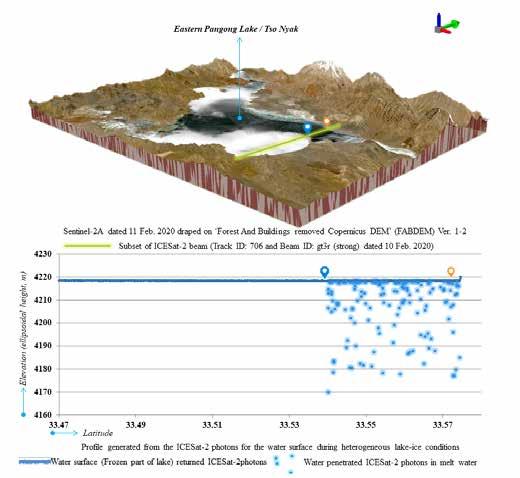
Researchers also observed green laser-based photons from the ICESat-2
1: Water-penetrated ICESat-2 photons in alpine lake’s meltwater.
penetrating the water column up to a depth of ~40m during clear water conditions; a phenomenon that successfully ushered in the spin-off application of ICESat-2 for shallow water bathymetry (Figure 1). However, night-time acquisitions are advised for higher precision,
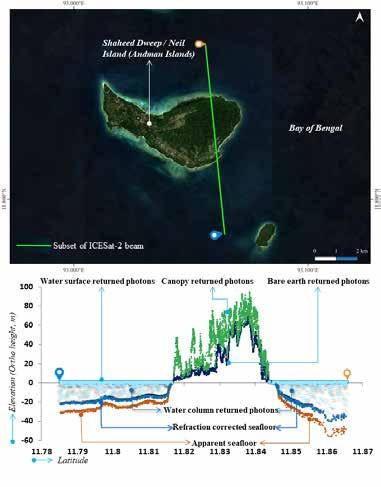
2: Seafloor detected using ICESat-2 photons in the shallow waters near Neil Islands/Shaheed Island (part of Andaman Islands).
About the authors
Dr Dandabathula Giribabu specializes in geospatial applications with an emphasis on the automation of processing chains. He has been affiliated with the Indian Space Research Organisation as a scientist for 25 years. Dandabathula is passionate about digital elevation models and mountain science. His recent research has led to surprising new insights into understanding the land bridge connectivity between India and Sri Lanka.
Omkar Ghatage works at the Regional Remote Sensing Centre – West, Jodhpur, India. His primary interest is using advanced earth observation (EO) systems for novel geosciences. His expertise ranges from the operational use of ICESat-2 photon data to generate shallow water bathymetry to the 3D perspective generation of landscapes. His current focus includes sand dune mapping, super-resolution digital elevation model generation and remote sensing applications for societal benefits.
Subham Roy works at the Regional Remote Sensing Centre – West, Jodhpur, India. Subham is a Google Earth Engine enthusiast and leverages large spatial datasets into actionable maps. He has made notable contributions to the surveillance of desert locusts using geospatial technology. His current focus includes studying the impact of climate change on alpine systems and automating the mapping of complex terrestrial landscapes such as riparian buffers.
due to reduced solar noise. The use of ICESat-2 data obtained during less sediment-heavy seasons is also advocated, to avoid photon attenuation and to reduce errors during bathymetric measurements.
The mode of data acquisition by ICESat-2 is along-track. Thus, to generate a bathymetry at a synoptic level, seafloor depths identified by the water-penetrated photons should either be used as seed points together with the optical remote sensing data or be interpolated to generate a surface from a set of multibeam photon clouds gathered from multi-date ICESat-2 acquisitions in conjunction
Figure
Figure
with known depths accrued from electronic navigation charts (ENCs) or other sources.
ICESat-2 photons, once they hit the Earth’s surface, return from a variety of features such as land, water, canopy and snow. Thus, to identify the seafloor-returned photons, the returns must be classified based on the surface features. Numerous data science-based clustering algorithms (e.g. DBSCAN) can classify the return photons based on the surface features (Figure 2). By default, photons that have returned from the seafloor are apparent and require the application of a refraction correction to retrieve their actual depths. This is because of the change in speed of light at the air-water interface due to the differing refractive indexes of air and seawater. The default vertical datum of ICESat-2 photons is the height above the WGS84 ellipsoid, which needs to be converted to orthometric heights using geodesy utilities. Once a cloud of depth points accrues from seafloor return photons, it can be applied to the surface generation method using interpolation techniques. During the interpolation process, there may be a need for other known depth points (e.g. from ENCs or other sources) to satisfy the criteria of ‘well-distributed points’ during the interpolation process.
Successful mapping of submerged Adam’s Bridge using ICESat-2 geolocated photons
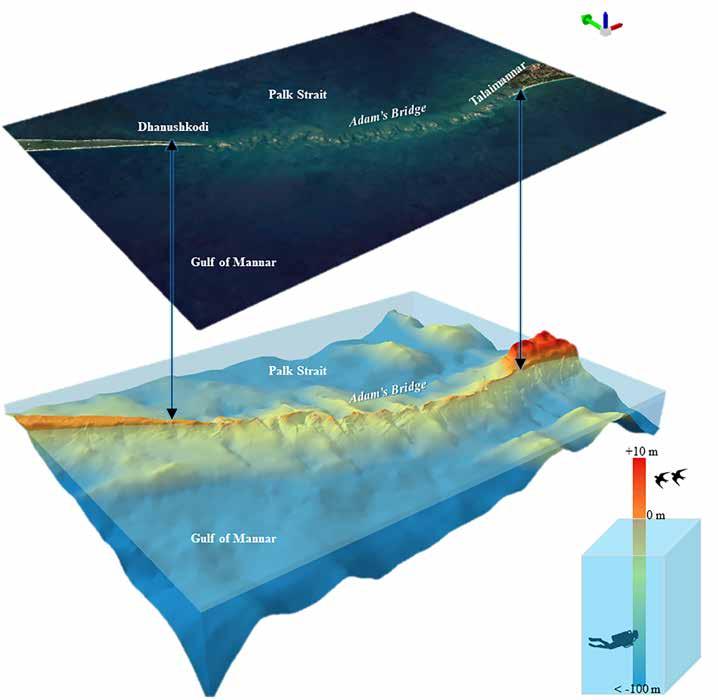
Adam’s Bridge joins Dhanushkodi, the south-eastern point of Rameshwaram Island in India, to Talaimannar, the north-western end of Mannar Island in Sri Lanka. The land bridge is an isthmus primarily submerged in shallow waters with occasionally exposed sandbanks. The southern part of Adam’s Bridge has the Gulf of Mannar, an arm of the Indian Ocean, and Palk Strait, an inlet of the Bay of Bengal, to the north.
Adam’s Bridge, regarded as a reefal assemblage, is a matter of scientific curiosity, and further understanding of its morphological structure based on a highresolution Digital Bathymetric Elevation Model (DBEM) would provide information to reconstruct its evolution. In ancient texts, the land bridge is referred to as Ram Setu or Nala Setu. Until recently, with the advent of optical satellite imagery, researchers have reported only on the exposed parts of
Adam’s Bridge, while very little information is available on the submerged structure due to the lack of high-resolution bathymetric information in its vicinity.
A high-resolution DBEM of Adam’s Bridge was generated successfully based on 133 tracks of ICESat-2 acquisitions between 2018 and 2023. Abiding by prerequisite conditions such as preferring night-time acquisitions and omitting data acquired during turbid load periods, 66 tracks qualified from the available 133 tracks, and these comprised 396 strong and weak beams of along-track data. All 396 data beams were processed to classify the returned photons from the water surface, water column, land and seafloor using clustering algorithms followed by manual correction using localized statistical algorithms to eliminate the outliers. The process produced ~0.2 million seafloor depths, which were used to generate a highresolution (10m) bathymetric model for the study area. To understand the intricate details of Adam’s Bridge, elevation values (of those features that are above the mean sea level) and the seafloor depth both proved to be vital; a simple digital bathymetric model with only depth values (below mean sea level) would not provide sufficient information about the exposed features of the study area. The advantage of ICESat-2 photons is that they give elevation information above mean sea level and depth values of the seafloor, enabling the realization of both exposed and submerged features in the study area.
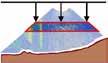
The results from this research provided intricate details of the submerged reefal assemblage of Adam’s Bridge (Figure 3). The first information that this DBEM provides is that, in its entire form, Adam’s Bridge is a submerged ridge with a submarine continuation of Dhanushkodi and Talaimannar Island from a rationalized depth of 8m. The current structure of Adam’s Bridge, being a barrier between two water systems – the Gulf of Mannar and Palk Strait – is influenced by the energy resulting from wave attacks from either side. At regular intervals
Figure 3: ICESat-2-based high-resolution DBEM for Adam’s Bridge – a submerged land bridge between India and Sri Lanka.
along Adam’s Bridge, sudden narrow channels of depths of two to three metres probably permit the free flow or exchange of water between the Gulf of Mannar and the Palk Strait. Importantly, the narrow channels are accompanied by perpendicular ridges, in particular stretching towards the side of Palk Strait. These perpendicular ridges are likely the result of accumulated sediments/sands pushed by the dominant energy waves from the Gulf of Mannar over the years.
Volumetric analysis by fixing 8m water depth as a base for the study area yielded a volume of ~1km3 – equivalent to 1,000 times that of the Empire State Building’s volume. Of the total volume of the entire Adam’s Bridge, the volume ratio towards the Gulf of Mannar and Palk Strait is 44:56. Furthermore, the volume of Adam’s Bridge above 0m is 0.02km3 which is only 0.02% of the total volume; this is the same extent that is visible in the optical satellite imagery. The ICESat-2 photon-based DBEM is now being used as an input to various studies to understand its evolution.
Promising scope of ICESat-2 photons for mapping shallow water bathymetry and its limitations
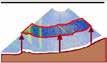
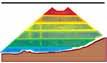
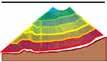
The multibeam approach of ICESat-2 acquisition enables an across-track span width of ~6km coverage with a spread difference of ~3km distance from the central beam pairs. Moreover, as each beam pair of ICESat-2 consists of a strong and weak beam with an across-track distance of 90m separation, it enables the accumulation of a good density of depth/elevation points. The high-resolution sampling for every 0.7m along the track provides detailed profiling of the Earth’s surface features. Recently, publications have shown the successful usage of ICESat-2’s geolocated photons as calibration data and seed data for empirical satellite-derived bathymetry. Coarse-resolution bathymetry datasets can be turned into high-resolution bathymetric models using the dense depth-point clouds accrued from the ICESat-2 water-penetrated geolocated photons. Open access global bathymetric data sources such as the General Bathymetric Chart of the Oceans (GEBCO) and Global Multi-Resolution Topography (GMRT) are available at ~450m and 100m, respectively. Research using the existing GEBCO depths and depths from the ICESat-2 photons enabled the creation of an
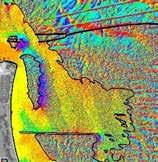
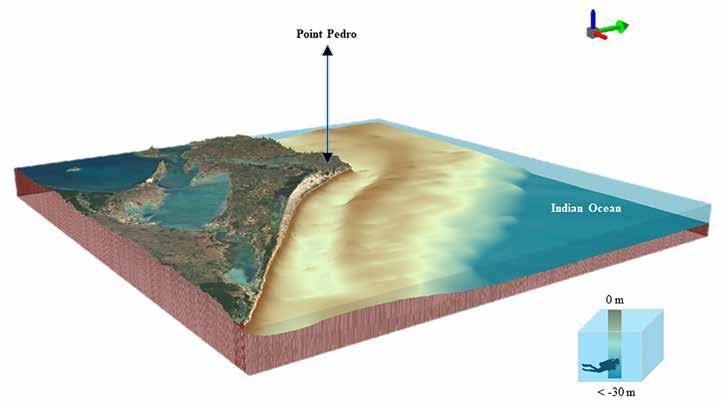
Figure 4: Super-resolution bathymetry data for the shallow waters at the coast of Point Pedro (Sri Lanka), generated by fusing GEBCO and ICESat-2-based seafloor depths.
improved resolution bathymetry dataset for the shallow waters at the coast of Point Pedro in Sri Lanka (Figure 4). Thus, there is ample scope to use the ICESat-2-derived seafloor depths to generate bathymetry for shallow waters at the global level.
There are limitations to using the ICESat-2 beams to derive the bathymetry for shallow waters. Computationally efficient clustering algorithms are available, which can aid in classifying the photons based on the returns from the water surface, water column and seafloor. However, not all the ICESat-2 acquisitions will enable seafloor detection. The sediment load in shallow water attenuates the ICESat-2 photon’s ray tracing mechanism to reach the seafloor, and daytime acquisitions generally fail to represent the seafloor returns. Furthermore, the 90day temporal resolution of ICESat-2 permits only four acquisitions per year, which dents the availability of data for the study area. In terms of generating the surfaces by using the collection of ICESat-2 photons and other known bathymetry depth points (e.g. from ENCs), the preference for an interpolation method and reduced cell size can also be challenging due to the complex topography of the seafloor. If inconsistencies exist between the depth values accrued from the ICESat-2 water-penetrated photons and the existing bathymetric sources, the surface generation produced by fusing both these datasets may exhibit significant errors and artefacts. Despite these technical limitations, ICESat-2 is currently the best available space-borne Lidar sensor to aid in generating bathymetry for shallow waters, with the highest accuracy.
References
Dandabathula, G., Hari, R., Sharma, J., Sharma, A., Ghosh, K., Bera, A. K., & Srivastav, S. K. (2023). Prerequisite condition of diffuse attenuation coefficient Kd (490) for detecting seafloor from ICESat-2 geolocated photons during shallow water bathymetry. Hydrology, 11(1), 11–22.
Dandabathula, G., Ghosh, K., Hari, R., Sharma, J., Sharma, A., Padiyar, N., ... & Chauhan, P. (2024). Physical features of Adam’s Bridge interpreted from ICESat-2 based highresolution digital bathymetric elevation model. Scientific Reports, 14(1), 14896.
Parrish, C. E., Magruder, L. A., Neuenschwander, A. L., Forfinski-Sarkozi, N., Alonzo, M., & Jasinski, M. (2019). Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote sensing, 11(14), 1634.
Babbel, B. J., Parrish, C. E., & Magruder, L. A. (2021). ICESat-2 elevation retrievals in support of satellite-derived bathymetry for global science applications. Geophysical research letters, 48(5), e2020GL090629.
Courtesy of Cadden
LINZ’s hydrographic survey of Tūranganui-a-Kiwa/Poverty Bay
How seafloor mapping reveals New Zealand’s maritime history
By Adam Greenland, Brad Cooper, Jennifer Coppola and Annette Wilkinson
Like other hydrographic offices, Toitū Te Whenua Land Information New Zealand (LINZ) collects survey data for safety of navigation, producing and maintaining nautical charts and products in accordance with SOLAS Chapter V, Regulation 9. Finding new and unusual features such as shipwrecks is the icing on the cake. LINZ’s recent survey of Tūranganui-a-Kiwa/Poverty Bay uncovered two locally known but previously uncharted wrecks, mapping them both in 3D and igniting interest in their stories – their origins, their voyages and their eventual demise.
As the New Zealand Hydrographic Authority, LINZ provides navigational products and services that support safe shipping. The information underpinning these products is captured through hydrographic surveys that map the seafloor. This data gives a detailed view of the seafloor and can be used to obtain a better picture of how the marine environment has changed with time, weather and geological events.
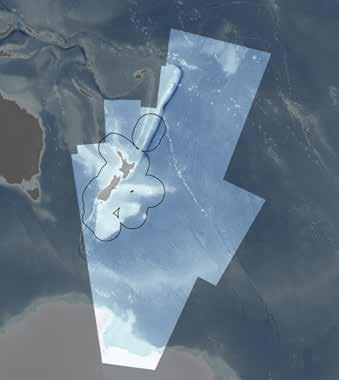
New Zealand’s area of charting responsibility is vast for the size of the country, covering an area comparable to Europe and North Africa. Not only does it cover New Zealand waters, but also parts of Antarctica and the South-West Pacific. As an island nation, New Zealand relies on shipping for many of its imports and exports. Seabed mapping provides the data needed to update nautical charts and to meet LINZ’s obligations to make navigating the waters around New Zealand, the South-West Pacific and the Ross Sea region of Antarctica safer.
Risk assessment and HYPLAN
New Zealand’s hydrographic survey plan, HYPLAN, was based on a novel risk assessment methodology completed in 2016. The risk assessment considers AIS vessel traffic data, the locations of
environmentally and culturally sensitive sites, hazards such as reefs and the age of the survey data currently on the chart. The resulting heat maps of navigation risk help LINZ to determine priority areas for surveys, sometimes replacing data collected during Captain James Cook’s voyages more than 200 years ago!
Partnering to benefit tangata whenua and conservation LINZ aims to ‘collect data once, use many times’, and proactively engages with local councils, other national agencies such as the Department of Conservation (DOC), and tangata whenua of Aotearoa (people of the land), who represent New Zealand’s Māori population. Partnering with others allows New Zealand to optimize funding and collect datasets that can be used for many purposes. In previous partnerships, LINZ extended the survey remit to cover areas for marine science research and collected additional data such as seabed samples and even seabird sightings.
For the Tūranganui-a-Kiwa/Poverty Bay survey, local iwi (tribal groups) were interested in data from the coastal area to the south of Young Nicks Head/Te Kurī. DOC also wanted Te Tapuwae o Rongokako
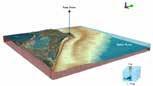
1: New Zealand’s charting responsibilities are highlighted, and its exclusive economic zone (EEZ) outlined in black.
Marine Reserve (ten nautical miles to the north) to be surveyed. The reserve has never been mapped in such detail and the information discovered will help to care for this marine taonga (treasure). Adding additional areas to be surveyed on top of the planned extent presents challenges; however, the benefits to iwi and for marine management and the protection of ocean biodiversity is of great importance to LINZ.
Figure
Approaches to Gisborne survey
Tūranganui-a-Kiwa/Poverty Bay is located in the Gisborne region, on the north-eastern coast of New Zealand’s North Island. In New Zealand, many place and feature names are made up of an English name and an original te Reo Māori name. Tūranganui-a-Kiwa is the Māori name for the bay, describing the long-standing or waiting place of Kiwa of the Horouta or Tākitimu waka (boat). Poverty Bay was named by Captain Cook on his voyage around New Zealand because he was not enamoured with the district. He wrote on 11 October 1769: “We weighed and stood out of the Bay, which I have named Poverty Bay, because it afforded us no one thing we wanted.” A large portion of the bay had not been mapped since the Royal NZ Navy’s singlebeam survey in the early 1950s. Since then, technology has advanced hugely, revealing what lies beneath the surface in greater resolution than ever before.
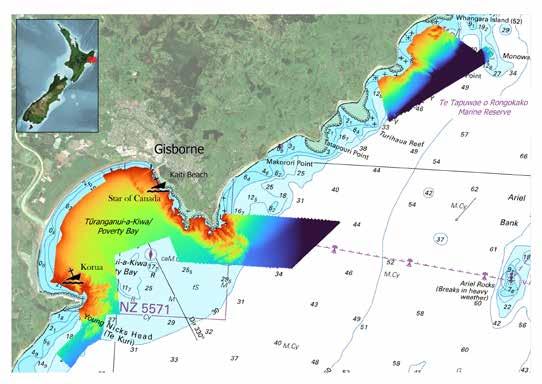
Discovery Marine Limited (DML), based in Tauranga, New Zealand, was contracted by LINZ to complete the survey. The survey covered two areas: the Tūranganui-a-Kiwa/Poverty Bay survey area was 88 km² and completed to LINZ-1 standard; the Te Tapuwae o Rongokako Marine Reserve was 21 km² and completed to LINZ-2 standard (see Figure 2).
The survey was done in two phases to take advantage of weather windows and optimize vessel use. The offshore phase was completed in November 2022 with a 23m (length), 6.4 m (beam) aluminium monohull vessel. The inshore phase was conducted between October and December 2023 using the 7.7m (length), 2.49m (beam) Senator 770.
The multibeam (MBES) used for both phases of the survey was the single-head Teledyne Reson SeaBat T50-R. Other key equipment included the Applanix POS MV WaveMaster II, AML Oceanographic Micro X sound velocity sensor and AML-3 LGR sound velocity and temperature profiler. Positioning was done using Trimble’s Fugro Marinestar. The MBES was operated at a frequency of 300kHz for the duration of the survey.
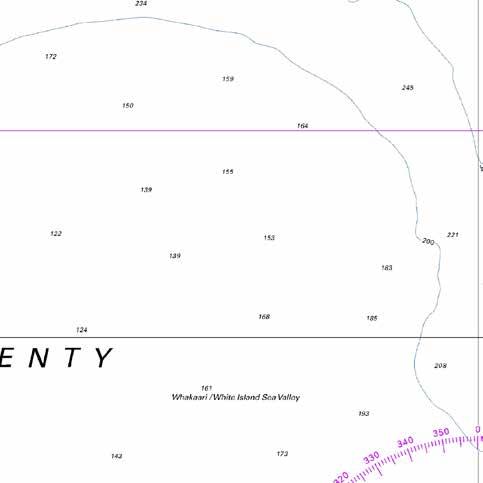
Figure 2: Tūranganui-a-Kiwa/Poverty Bay survey area, including Te Tapuwae o Rongokako Marine Reserve. Two previously uncharted wrecks (Korua and Star of Canada) were mapped in detail during the survey.
About the authors
Adam Greenland is the National Hydrographer at LINZ, the New Zealand Hydrographic Authority. He holds a Merchant Navy Deck Officer Certificate of Competency, a tertiary qualification in hydrographic surveying and mapping sciences, and is a Member of the Royal Institution of Chartered Surveyors.
Brad Cooper is a Senior hydrographic surveyor at LINZ. In his role he assists with the management of the HYPLAN hydrographic survey programme, managing contracts and validating data as it makes its way onto the charts.
Jennifer Coppola started her career at LINZ in 2011 as a nautical cartographer. She is now a senior geospatial specialist working with sea-level data, but still enjoys making maps.
Annette Wilkinson is a hydrographic surveyor at the New Zealand Hydrographic Authority at LINZ. Her role helps ensure safe navigation in New Zealand waters, focusing on project planning and contracts for hydrographic surveys. She is also the New Zealand S-102 technical expert.
Besides the bathymetry required for updating nautical charts, other datasets such as acoustic backscatter and water column data were simultaneously acquired from the MBES system. To help reduce the large data volumes associated with water column data, two operating modes were adopted: ‘normal operation’ mode offered higher compression, and ‘area of interest’ mode offered lower compression with higher resolution over suspected freshwater springs and reef areas.
In all, 8.1TB of raw data was collected, which besides updating charts can be used for habitat and sediment deposition mapping, flood planning and 3D visualization of shipwrecks.
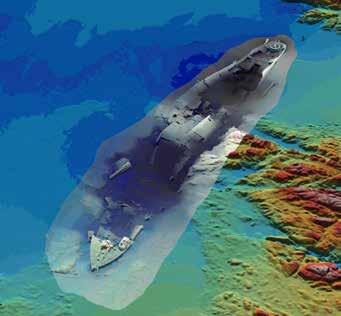
Shipwrecks rediscovered during survey Star of Canada
The Tūranganui-a-Kiwa/Poverty Bay survey mapped two previously uncharted shipwrecks: the Star of Canada and the Korua. While the local community was aware of these wrecks, they have never been mapped to such fine detail (Figure 2).
The 7,280-ton steamer Star of Canada first voyaged to New Zealand in 1910. For the next two years, it regularly travelled from Australia and New Zealand to England, carrying chilled and frozen meat and other produce. On 23 June 1912, a southerly squall blew the vessel onto Kaiti Beach, where it struck rocks and began taking on water. The next couple of days was spent salvaging as much of the cargo as possible, including mutton, oats, wool and antimony. Fortunately, no souls were lost.
A heavy swell finally broke her hull, and she was abandoned to the underwriters. The two-storied wheelhouse and captain’s cabin, plus part of the deck superstructure, was purchased by a local engineer and brought ashore. In 1983, the Star of Canada was bequeathed to the citizens of Gisborne and, in 1985, the wheelhouse was moved with great pomp (in a festival that coincided with high tide) to its current location.
The superstructure now sits along the Tūranganui River in Gisborne and houses the Tairāwhiti Museum. The captain’s cabin largely contains the original fixtures and fittings and many artefacts that were salvaged from the ship.
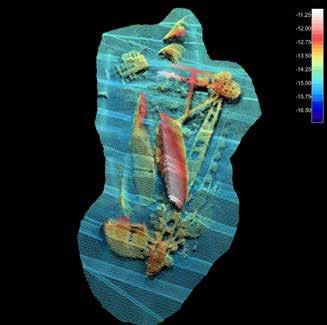
The second wreck found during the survey was the remains of the dredge Korua (Figure 4), off Young Nicks Head/Te Kurī. This vessel was used to dredge nearby Napier and Gisborne harbours in the 1930s. She played a significant role in the establishment of the Port of Gisborne. At the time, several harbour schemes had been proposed for Gisborne. A breakwater groyne was
constructed in the early 1900s and the river diversion wall was built in the 1920s to reroute the Tūranganui River. Between 1925 and 1931, Korua’s role was to excavate 1,920,000 tons of spoil. Today, the Port of Gisborne is critical for primary industry exports such as logs, kiwifruit and squash.
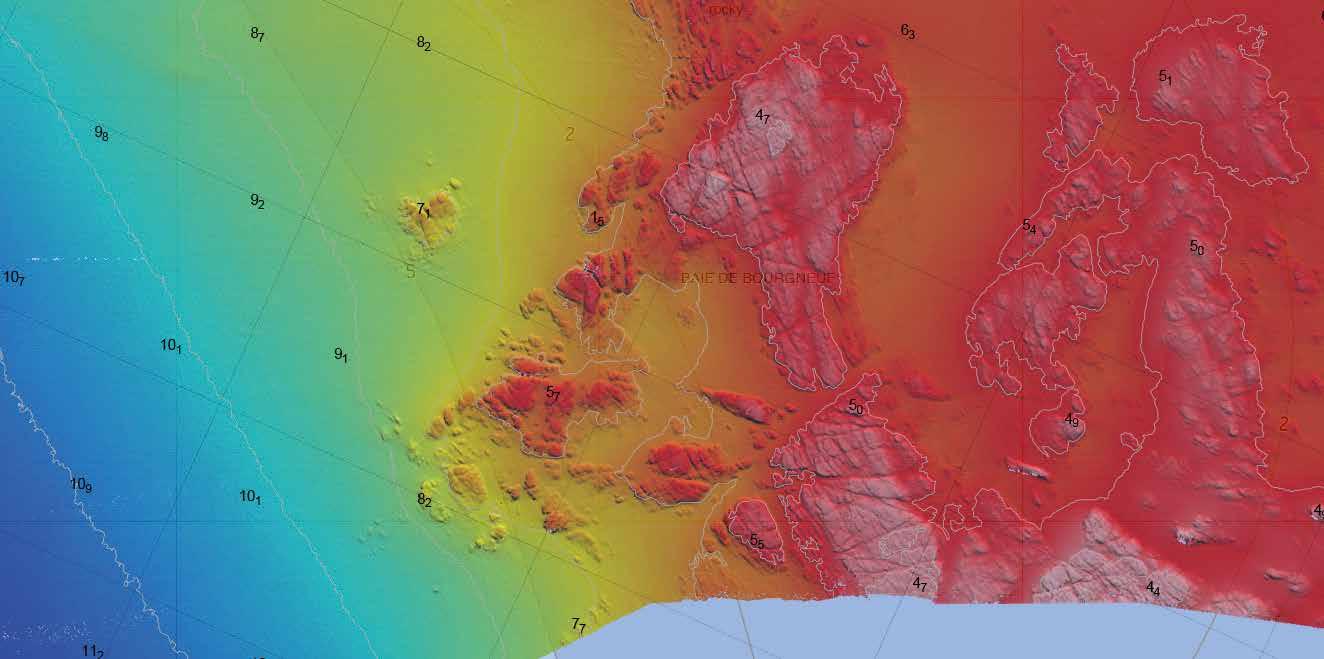
Korua was scuttled in 1940 when it was no longer of use. Interestingly, the 1953 navy survey did detect a shoal sounding (three fathoms, two feet, roughly equal to 6.1m) in the location of the Korua wreck (Figure 5). With today’s technology, the wreck can be mapped in much higher resolution. The least depth over the wreck is now 11m, which suggests the wreck may have toppled over in the 70 years since it was last detected by an echosounder.
LINZ open data services
Data captured in the Gisborne hydrographic survey, including details of the two wrecks, will be used to update nautical charts of the area and help to make navigation safer. The upcoming LINZ 3D Coastal Mapping programme will map up to 40% of New Zealand’s coastline and could also reveal previously unknown features such as shipwrecks.
In keeping with LINZ’s goal to ‘collect once, use many times’, LINZ’s open data policy means that all data it collects is available for anyone to use under Creative Commons Attribution 4.0 International licence (CC-BY 4.0). Bathymetric surfaces in the form of twometre depth grid models can be downloaded from the LINZ Data Service (https://data. linz.govt.nz/). Other data is available upon request by emailing hydro@linz.govt.nz.
Figure 5: A 1953 survey detected a shoal sounding (three fathoms, two feet) in the location of the Korua shipwreck. The figure shows the historic sounding sheet superimposed on the high-resolution multibeam depth surface.
Conclusion
LINZ surveys the waters of its charting area as part of its international obligations and determines survey extents based on hydrographic risk assessments. The data needs of local stakeholders and other government agencies are considered in LINZ’s hydrographic survey plans, which acknowledges the wide use of hydrographic data. Among the rich dataset of the Gisborne survey, two known wrecks were mapped and charted for the first time, improving navigational safety in the area. Each wreck has its own story, but one shows the value of increased coverage with MBES compared to an old SBES survey that detected an anomaly but did not identify the wreck. It is also noted that features such as wrecks make for a very engaging way to get the public interested in hydrographic surveying.
LINZ is currently updating its risk assessment, which will help inform the future HYPLAN. Who knows what wrecks will be uncovered next…
Korua
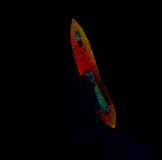
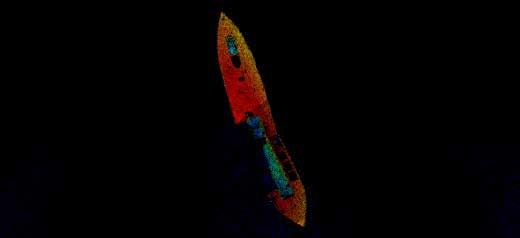
Figure 3: 3D image of the Star of Canada wreck.
Figure 4: The remains of the Korua shipwreck scattered on the seafloor.
Figure 6: Black and white image of the dredge, Korua. (Image courtesy: Stan Vincent, Tairāwhiti Museum)
Innovative tool for seabed data exploration
Espresso: Open source software for the visualization of multibeam water column data
By Alexandre Schimel, Yoann Ladroit and Sally Watson
Espresso is a free and open source software to visualize and analyse multibeam water column data. Its core feature is the capability to echo-integrate water column data vertically, allowing for the visualization ‘from above’ of georeferenced water column acoustic anomalies across multiple files. Originally developed at NIWA, Espresso is now open source, licensed under MIT, maintained internationally and available on GitHub. The software is coded in MATLAB and a compiled version is available for Windows.
Modern multibeam echosounders can record the acoustic echo returned by objects in the water column between the sonar and the seafloor. This ‘water column data’ can provide useful information about the presence, density, shape and temporal nature of features in the water column such as fish, gas seeps, aquatic vegetation, turbidity, shipwrecks or human-made structures. As a result, water column data is increasingly requested as an additional output of hydrographic surveys carried out under the guiding principle of ‘collect once, use many times’.
However, water column data comes with challenges. In particular, the data is difficult
to store and dispatch due to its size, which is typically several orders of magnitude larger than bathymetry and backscatter data. The cause of this size disparity is that for any given ping and beam, there is one bathymetry value and one (or several) backscatter data value(s), but hundreds to thousands of water column data values, each corresponding to a different range from the sonar head to the seafloor and beyond. In other words, water column data is essentially a 3D dataset – varying in pings, beams and range – and this additional dimension leads to another challenge: to visualize and interpret multidimensional data, a visualization method must be chosen that eliminates some dimensionality, at the
cost of introducing some inconvenience and/or ambiguity.
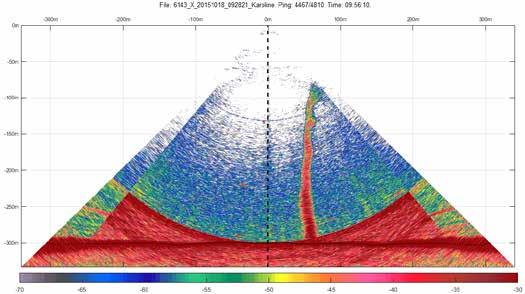
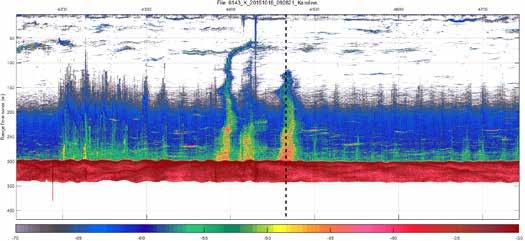
For example, water column data is most naturally visualized as a ‘wedge view’, where the values for each beam and each range of a single ping are displayed in the across-track plane (Figure 1a). This method effectively eliminates the ping dimension, so its inherent issue is that to visualize the entire dataset, one would need to go through every ping, one at a time, for every file. A less inconvenient visualization method is the ‘range-stack view’, where the signal for any given ping at a given range is averaged over all beams, which allows the visualization of many pings’ worth of data varying in
Figure 1: Example of water column data containing echoes from gas seeps, visualized as a wedge view (a) and as a range-stack view (b). (Data courtesy: Kongsberg EM710 data from the FOSAE-2015-BH03 survey in the Barents Sea, acquired as part of the Norwegian seafloor mapping programme MAREANO (Bøe et al., 2020))
About the authors
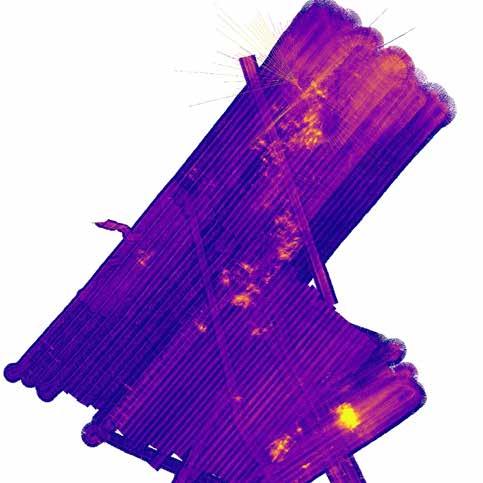
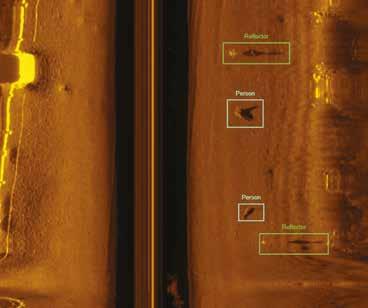
Figure 2: Example of vertically echo-integrated view of water column data containing echoes from gas seeps, created and annotated with Espresso and exported to ArcGIS. The strong acoustic echoes produced by gas seeps are visible from above as ‘hot spots’ (bright yellow) relative to their empty water column surroundings (purple). (Data courtesy: Kongsberg EM302 data acquired from NIWA vessel RV Tangaroa over the Calypso Hydrothermal Vent fields in the Bay of Plenty, New Zealand (Lamarche et al., 2019; Spain et al., 2022))
range, as a single image akin to that of a single-beam echosounder (Figure 1b). This method effectively eliminates the beam dimension, at the cost of causing acoustic anomalies to appear distorted and ambiguous. For example, two horizontal echoes on separate sides of the vessel would appear as a single vertical mark in this view. Moreover, to visualize an entire dataset, it is still necessary to go through many such range-stack images.
A powerful but little-known visualization method is the ‘vertically echo-integrated view’, in which the 3D dataset is georeferenced, gridded and averaged vertically, which enables a 2D visualization ‘from above’ in the manner of bathymetry grids or backscatter mosaics (Figure 2). This method has the enormous advantage of allowing the display of several files’ worth of data in a single image, for efficient scanning and interpretation of broad regions of data. This approach essentially sacrifices the vertical dimension, for which the cost is ambiguity about the depth of an acoustic anomaly, but this is mitigated if the interval of depth, range or height above seafloor of the data to be vertically echo-integrated can be specified. Vertical echo integration has already proven useful for applications such as bubble vent localization (Urban et al., 2017; Mitchell et al., 2022) and mapping kelp density (Lucieer et al., 2023) but, to
Alexandre Schimel
AIexandre Schimel is an engineer/ researcher at the Geological Survey of Norway (NGU) with expertise in the development of data processing algorithms for sonar systems (particularly multibeam) and other marine sensors, including machine learning/deep learning approaches.
Yoann Ladroit
Yoann Ladroit is a biological oceanographer specialized in underwater acoustics instrumentation and data processing. He worked as a fisheries scientist in the South Pacific and Antarctica for ten years before joining the Ocean Science team from Kongsberg Discovery in 2023.
Sally Watson
Sally Watson is a marine geoscientist at the National Institute of Water and Atmospheric Research (NIWA) and University of Auckland, in New Zealand. Sally researches marine geological processes including seafloor fluid expulsion using a range of geological and geophysical techniques.
date and to our knowledge, it is not implemented in any of the few examples of commercial software available to visualize multibeam water column data.
Presentation and workflow overview
Espresso is a research software developed at NIWA between 2018 and 2021 to scrutinize multibeam water column data, including a capability for vertical echo-integration (Figure 3). Espresso is now open source and free to use under MIT licence, and available for download at https://github.com/alexschimel/Espresso. Espresso is coded in MATLAB, but releases are also compiled for Windows, which allows installation of the software as any standard Windows application without the need for a MATLAB licence. In this article, we summarize some of Espresso’s core features. For more information on its capabilities, please see its growing wiki at https://github.com/ alexschimel/Espresso/wiki, which currently includes a quick start guide and a user guide (in development).
An Espresso session starts with converting and loading the desired raw data files. The raw data can be visualized, but Espresso offers a range of pre-processing options to remove or filter unwanted noise that may otherwise dominate the picture, especially in
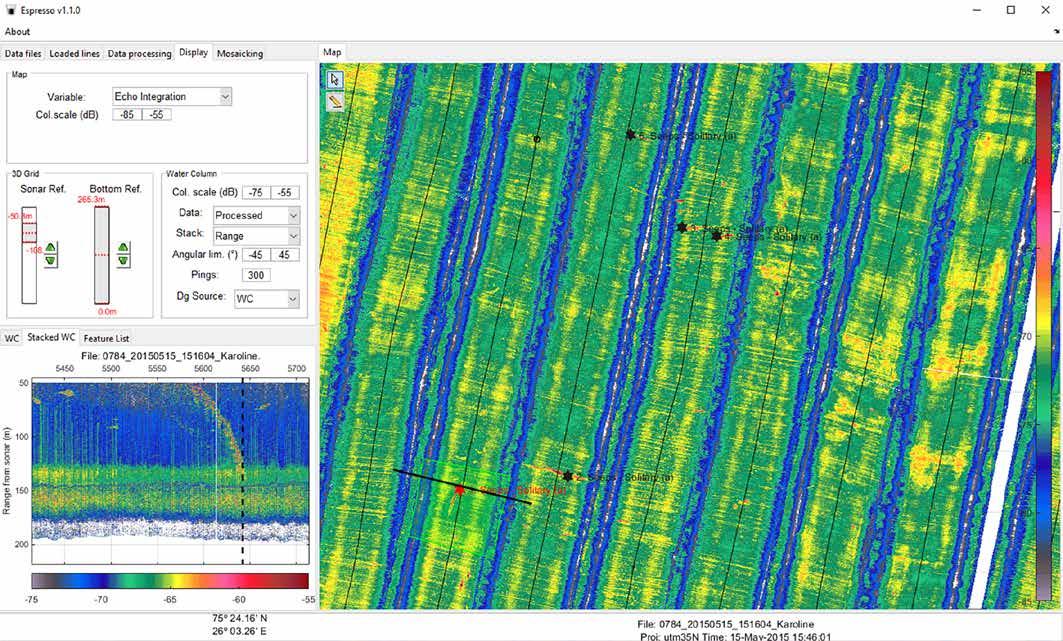
Figure 3: An example screenshot of the main window of Espresso, showing the vertically echo-integrated view for multiple files with geo-picked gas flares (right), display options (top-left) and a range-stack view showing a gas flare (bottom-left). (Data courtesy: Kongsberg EM710 data from the FOSAE2015-BH03 survey in the Barents Sea, acquired as part of the Norwegian seafloor mapping programme MAREANO (Bøe et al., 2020))
vertically echo-integrated view. These preprocessing options include 1) masking (that is, removing) portions of unwanted data, 2) radiometrically correcting the backscatter level, and 3) filtering the sidelobe artefacts (Figure 4). Several masking options are available, parameterizable and combinable, to remove a range of possibly unwanted data, such as close-range data (perhaps contaminated by wash-down bubble noise), outer beams, bad-quality pings, data making up the seabed echo (or data within a set distance above the seabed echo) or data beyond the minimum slant range. The sidelobe artefacts filtering option is the ‘Slant Range Signal Normalization’ algorithm described in Schimel et al. (2020).
Espresso can vertically echo-integrate all the water column data in the loaded files (minus data that was masked), but it is possible to limit this processing to data within a given depth interval, or within a given height-above-seafloor interval (Figure 4). This allows focusing the vertically echo-integrated view on certain objects
of interest defined by their depth in the water column (such as the deep scattering layer) or by their height above the seafloor (such as aquatic vegetation). In both cases, the result of vertical echo-integration is a horizontal, georeferenced 2D grid, with water column acoustic anomalies shown as hot spots, distinct from the surrounding low-acoustic-energy background (Figure 4). Espresso operates this process on each file individually, but the resulting 2D grids can be blended in a single 2D mosaic, which can then be exported as a geotiff file for further analysis in GIS software (Figure 2).
Espresso also includes additional tools and visualizations to deepen the exploration of water column data. The standard ‘wedge view’ and ‘stacked view’ (in-range or indepth) are also available (Figure 1). The accompanying bathymetry (and in some data formats, seafloor backscatter data) can also be gridded and displayed, allowing a check of whether water column data anomalies correspond to certain features of the seafloor. Finally, Espresso also
includes geo-picking capabilities, enabling users to record the location of features of interest in the water column data as points or polygons, which can be augmented with information and exported in shapefile and text format.
Applications and limitations
Espresso has been used for research by NIWA and NIWA partners for locating gas seeps (Turco et al., 2022) and benthic habitat mapping (Porskamp et al., 2022). In the first case, vertical echo-integration provided insights into the total area of gas seepage in proximity to the seafloor. In the second case, the vertical echo-integrated mosaic was used as an additional geographic layer in a machine learning algorithm, which resulted in increased accuracy in predicting kelpdominated habitats. NIWA also routinely uses Espresso to visualize bathymetry and seafloor backscatter of newly acquired data for quality control. We foresee that Espresso could be used in various other applications, for example by hydrographers for routine examination and quality control of water
column data, by marine biologists for fish school shape analysis, by marine conservationists for location of leaking offshore pipelines, by coastal scientists for turbidity plume tracking, or by marine engineers for examination of the footprint of submerged infrastructure.
Espresso was developed by researchers as a research tool, and thus has more limitations than a software created and maintained by professional developers for commercial use. First, it supports a limited number of multibeam data formats: mostly the Kongsberg .all/.wcd and .kmall/.kmwcd formats, with some support for the Teledyne .s7k format (SeaBat, Norbit systems). Moreover, the data processing in Espresso is often highly simplified, meaning that processed data does not have the same level of quality and positional accuracy as that of professional hydrographic software. More importantly, Espresso was coded in MATLAB and thus faces significant limitations in memory and speed, although considerable efforts were made to optimize the software for large-data handling (e.g. water column data is accessed via memory mapping) and computing speed (some processing steps use parallel computing on machines equipped with a compatible GPU).
Conclusion
Vertical echo-integration is a novel and useful visualization method for multibeam water column data, with a high potential for routine data examination and research. The open source Espresso software provides this visualization capability (and other features) to everyone and for free (under the terms of the MIT licence), thereby constituting a powerful complement to commercial software for the scrutinization and processing of multibeam water column data. The authors hope that the hydrographic community finds this tool useful. If you use Espresso in your work, please acknowledge the authors of this article. For citations, a peer-reviewed article is in preparation.
References
Bøe, R., Bjarnadóttir, L. R., Elvenes, S., Dolan, M., Bellec, V., Thorsnes, T., Lepland, A., & Longva, O. (2020). Revealing the secrets of Norway’s seafloor – geological mapping within the MAREANO programme and in coastal areas. Geological Society, London, Special Publications, SP505-2019–2082. https://doi. org/10.1144/SP505-2019-82
Lamarche, G., Le Gonidec Y., Lucieer V., Ladroit Y., Weber T., Gaillot A., Heffron E., Watson, Sy. & Pallentin A. (2019). Gas bubble forensics team surveils the New Zealand ocean. EOS Earth & Space Science News, 100. https://eos.org/scienceupdates/gas-bubble-forensics-team-surveils-the-new-zealandocean
Lucieer, V., Flukes, E., Keane, J. P., Ling, S. D., Nau, A. W., & Shelamoff, V. (2023). Mapping warming reefs – An application of multibeam acoustic water column analysis to define threatened abalone habitat. Frontiers in Remote Sensing, 4, 1–15. https://doi.org/10.3389/frsen.2023.1149900
Mitchell, G. A., Mayer, L. A., & Gharib, J. J. (2022). Bubble vent localization for marine hydrocarbon seep surveys. Interpretation, 10, SB107–SB128. https://doi.org/10.1190/INT2021-0084.1
Porskamp, P., Schimel, A. C. G., Young, M., Rattray, A., Ladroit, Y., & Ierodiaconou, D. (2022). Integrating multibeam echosounder water-column data into benthic habitat mapping. Limnology and Oceanography, 67, 1701–1713. https://doi.org/10.1002/ lno.12160
Schimel, A. C. G., Brown, C. J., & Ierodiaconou, D. (2020). Automated filtering of multibeam water-column data to detect relative abundance of Giant Kelp (Macrocystis pyrifera). Remote Sensing, 12, 1371. https://doi.org/10.3390/rs12091371
Spain, E., Lamarche G., Lucieer V., Watson S., Ladroit Y., Heffron E., Pallentin A. & Whittaker, J.M. (2022). Acoustic predictors of active fluid expulsion from a hydrothermal vent field, offshore Taupō Volcanic Zone, New Zealand. Frontiers in Earth Science, 9, 785396. https://doi.org/10.3389/feart.2021.785396
Turco, F., Ladroit, Y., Watson, S. J., Seabrook, S., Law, C. S., Crutchley, G. J., Mountjoy, J., Pecher, I. A., Hillman, J. I. T., Woelz, S., & Gorman, A. R. (2022). Estimates of methane release from gas seeps at the Southern Hikurangi Margin, New Zealand. Frontiers in Earth Science, 10, 1–20. https://doi.org/10.3389/ feart.2022.834047
Urban, P., Köser, K., & Greinert, J. (2017). Processing of multibeam water column image data for automated bubble/ seep detection and repeated mapping. Limnology and Oceanography: Methods, 15, 1–21. https://doi.org/10.1002/ lom3.10138
Figure 4: Overview of the core workflow of Espresso, from loaded raw data to the vertical echo-integration of individual files.
We proudly present our premium members, the ambassadors of tomorrow's hydrography!
Will you be next?
Gold members
Leveraging advanced technologies for coastal zone management
Monitoring the Baltic shoreline using airborne Lidar bathymetry
By Grzegorz Szalast and Marta Sieczkiewicz, GISPRO, Poland
Due to the specifics of the Baltic Sea, performing accurate measurements in the coastal zone is not an easy task. For the past decade, topographic laser scanners have been used for the periodic monitoring of the sea’s southern coast in Poland, in addition to profiles using GNSS RTK receivers. This article outlines the work to verify the feasibility and accuracy of using airborne Lidar bathymetry (ALB), both on the seabed and on land.
The southern coast of the Baltic Sea is characterized by great variability. Due to storms, sandy beaches are becoming wider and wider in some places, while in other places they are simply disappearing. The desire to prevent these effects has driven the need to permanently monitor changes and respond accordingly. Annual monitoring of the state of the sea shore is a statutory obligation, and is the responsibility of the directors of Poland’s Maritime Offices.
For almost a decade, the Maritime Office in Szczecin and the Maritime Office in Gdynia have commissioned flights using topographic laser scanners. Topographic scanners are hard to beat when it comes to tracking land changes; they enable the entire coastline to be mapped with high accuracy. Unfortunately, however, the laser pulse in the near-infrared range is not capable of penetrating water. This results in a lack of complete information about the coastal zone. Such information is not provided by height profiles either. Theoretically, a solution to this problem could be the use of an airborne bathymetric scanner. But can the results achieved with this type of measuring equipment meet the expected accuracy in such a difficult body of water as the Baltic Sea?
The challenges of the Baltic Sea
Due to the specifics of the Baltic Sea,
performing measurements in the Baltic coastal zone is not a simple task. Each measurement method has its own advantages and limitations, but they become particularly significant in the case of this body of water. For example, because the Baltic Sea is a shelf sea, it is particularly difficult to map its bottom in the coastal zone using multibeam echosounders. Hydrographic boats generally have a greater draught, so it is impossible to use them. On the other hand, the use of a shallow-draught survey boat requires measurements to be made in near-ideal weather conditions. Otherwise, the undulations of the Baltic Sea could cause the boat to capsize.
Therefore, the most common method of measuring the coastal zone of the southern Baltic Sea has been to make profiles using a GNSS receiver. The land surveyor’s task is
1: Comparison of mapping performance of a multibeam echosounder and ALB.
2: Average annual Secchi disc depths based on data from 1990-2005. (Image courtesy: Lindgren and Håkanson, 2007)
then to make cross-sectional profiles, within which measurements are taken of the dunes, beach and in the water – as deep as possible. This technology is undoubtedly sufficient for the implementation of measurements over small distances, because it is extremely mobile and independent of weather conditions. However, the potentially high waves of the Baltic Sea pose a problem.
Low water clarity
Aerial bathymetric scanners are known to be ideal for mapping mountain lakes or clear oceans and seas. In fact, many suppliers’ promotional materials boast about their
Figure
Figure
scanner’s ability to reach depths of several dozens of metres in clear water. But the Baltic Sea certainly does not fall into this category; it is a body of water with relatively low water clarity.
An additional factor affecting bathymetric measurements from an aircraft is wave action. The Baltic Sea can be turbulent, and the frequency of waves can be much higher than in oceanic waters. All of this makes taking measurements difficult, but not impossible. The key is to have a good understanding of the environment and constantly keep track of changing conditions in the air and on the water.
Testing the feasibility of ALB
Another factor affecting the popularity of a particular measurement method is its reliability. Technologies that have been known and well established for decades are approached differently than niche methods that are relatively new. Having said that, it should be noted that some first attempts to map the southern Baltic coast using ALB were made as early as 2007. Unfortunately, their results were not commensurate with the cost of acquiring the data at that time.
That trend began to reverse in recent years, when public contracts for monitoring selected sections of the Polish coast began to appear. GISPRO SA carried out one of the pilot projects in this regard under an order from the Maritime Office in Szczecin. The purpose of the undertaken work was to verify the feasibility of using ALB on the Baltic coast and, more importantly, to verify the accuracy of measurements using ALB both on the seabed and on land.
Technical conditions and equipment
Profiles were to be taken at least every 200m from the dune/cliff crest, across the beach and under the shore, up to a distance of 500m into the sea (from the shoreline). Measurements in profile were to be taken every 5-10m and at characteristic locations. The measurement process was to be a continuum, using a GNSS RTK receiver on land and shallow water, and a singlebeam echosounder while in the water. Aerial scanning was to be performed for the entire
10.4km stretch of the coastline, both for the land surface and the bottom, with a density of no worse than 6pts/m2 for the last return.
A Riegl VQ-880-G II was chosen as the airborne laser scanner, which emits laser pulses in the green (532nm) and near-infrared (1,064nm) ranges. It has integrated PhaseOne XM-100 cameras, and is also equipped with an advanced Trimble Applanix AV-610 GNSS positioning system with a high-end IMU-57 inertial unit. The SonarMite BTX singlebeam echosounder (SBES), integrated with a Trimble R8 GNSS RTK receiver, was installed on a lightweight survey boat. A Trimble R12 GNSS RTK receiver was used to measure profiles on land and in the shallow water.
Measurement campaign and products
The measurements were taken on 30 October 2022 under good weather conditions. The sky was overcast with clouds, but there was no precipitation. The wind blew at a speed of only 1m/s. Bathymetric laser scanning was performed from an altitude of 530m AGL at a speed of 100kn.
The result was a point cloud with a minimum density of 6.42pts/m2. Measurements using the SBES were made after calibration using a calibration bar. After sound velocity profiling (SVP), the average velocity in water was determined to be 1,465m/sec. After data processing, photo sketches were prepared showing profiles taken with the GNSS RTK receiver and SBES, RGB CIR orthophotos and a georeferenced point cloud for the coastal area and the underwater part.
Evaluating ALB accuracy
As part of the work carried out, the accuracy of measurements taken by various techniques was verified. To this end, after classifying the point cloud from the bathymetric scanner, a digital terrain model and a digital bottom model were made. Points measured with a GNSS receiver on land and GNSS working with a singlebeam echosounder were then dropped onto the surface. In this way, the
Figure 3: ALB point cloud with GNSS RTK-SBES elevation profiles. (Image courtesy: GISPRO SA)
height coordinates of the same points were obtained using different measurement technologies. Thus, it became possible to compare the values obtained (see Table 1).
Conclusions
It is particularly challenging to take bathymetric measurements in shallow water because the use of traditional surveying techniques poses many problems. The shallow depth essentially eliminates the point of using a multibeam echosounder. The scanning strip of the echosounder would be small, and the echosounder itself could be damaged by entering a shallow area, or by an object lying on the bottom.
Therefore, the only alternative remains to make profiles using a singlebeam echosounder and a GNSS RTK receiver. Unfortunately, this method is fraught with very poor performance, and its results are limited only to depth information within the profile. In the test area, it was recorded that the time required for land-water profiles was 40 human-hours. In contrast, the flight time using an airborne bathymetric scanner was about 1 human-hour.
One major drawback of ALB technology is the limitations associated with its use. Both suitable atmospheric and environmental conditions are necessary. Cloud cover, wave action, wind direction and strength, and water clarity are important. It is crucial to conduct recording at the moment of least contamination with organic and inorganic matter above the bottom.
Regardless of the above, bathymetric laser scanning was demonstrated to obtain the most complete image of the shallowwater area in a relatively short time. This made it possible to create a reliable model of the bottom containing complete information. As a result, it is easier to not only identify objects lying in the water, but also track changes resulting from the activity of the sea.
About the authors
Grzegorz Szalast
Grzegorz Szalast is a historian and archaeologist. He is currently the director of sales and business development at GISPRO SA and the owner of ArchService. Over the years, he has been responsible for utilizing TLS, MMS/MLS, UAV and GPR technologies. He is passionate about Lidar technology and closerange photogrammetry. In his spare time, he creates digital twins of monuments.
Marta Sieczkiewicz
Marta Sieczkiewicz is currently the president of the Research and Development Center at Gispro Technologies Sp. z o.o. and the director of the Department of Aerial Photogrammetry at GISPRO SA. Her professional activities particularly focus on aerial survey, as well as environmental remote sensing analysis.
The positive results obtained from the pilot project undoubtedly contributed to the tenders for monitoring the entire Baltic coast with airborne Lidar bathymetry. As a result, GISPRO SA has already had the opportunity to map the entire coastline for both the Maritime Office in Szczecin (in 2023) and the Maritime Office in Gdynia (in 2024). During the work carried out, in addition to satisfactory mapping of coastal geometry and the seabed, it was even possible to scan some wrecks. One example is the wreck of the concrete ship Karl Finsterwalder off the coast of Wolin Island.
The continuation of the work related to the monitoring of the Polish coast in the coming years may bring many interesting conclusions and significantly improve the quality of protection of the Baltic coastline.
Acknowledgements
These works were carried out using equipment and knowledge obtained during the ‘Research and development works on the creation of a complete, multimodal mapping system for the needs of inland and sea waterways and exploitation areas’ project, number POIR.01.01.01-00-1372/19, funded by The National Centre for Research and Development, Poland.
Further reading
Average annual Secchi depths: https://www.researchgate.net/ publication/235631628_Reconstruction_of_the_eutrophication_in_ the_Gulf_of_Finland_using_a_dynamic_process-based_mass-balance_ model
Table 1: Comparison of the values obtained using different measurement technologies.
Figure 4: The wreck of the concrete ship Karl Finsterwalder, captured in the ALB data. (Image courtesy: GISPRO SA)
Integrating geological sampling and topobathymetric monitoring data for resilience planning
Mapping Chicago’s beach and nearshore sand distributions for effective management
By Robin Mattheus, Mitchell Barklage and Liane Rosario, Illinois State Geological Survey, USA
Lake Michigan water levels fluctuate by as much as two metres over decadal time spans, altering how waves and currents interact with coastal sediments and lakefront infrastructure in ways not yet fully understood. Understanding sediment transport dynamics is foundational to effective coastal resilience planning. This article shares insights from an offshore sand assessment and beach topobathymetric monitoring study of the greater Chicago coast, a collaboration with the Illinois-Indiana Sea Grant and Illinois Coastal Management Program.
Semi-periodic fluctuations in Lake Michigan’s water level, measured in metres at the decadal scale, combine with storms to create a variety of coastal management problems along the greater Chicago lakefront. There are around two dozen engineered beaches along this ~40km-long stretch of coast, which provide recreational opportunities to a metropolitan population approaching ten million. Vegetated dune terrains are also found within this urban lakefront landscape. These beach areas are proven to be ecologically important as a bird nesting habitat, including for the threatened Great Lakes piping plover, and as a general migratory stopover site. Changes in lake level, which alter sediment transport dynamics along the coast, also factor into other management challenges. These include the shoaling of marine navigation and harbour approach channels and lakebed downcutting, which threatens lakefront infrastructure integrity. Despite the importance of understanding coastal sand transport patterns along heavily urbanized portions of the Great Lakes coast, little work has gone into mapping offshore sand distributions and monitoring geomorphic
changes close to shore. Such efforts must be at the core of coastal resilience and other management endeavours.
The Illinois State Geological Survey’s Coastal Geology Group (ISGS-CGG) has been working
closely with the Illinois Coastal Management Program, the Chicago Park District and the National Oceanic and Atmospheric Administration’s Illinois-Indiana Sea Grant Office since 2020 to improve geological maps and geomorphic models for the SW Lake
Figure 1: Aerial drone images of the Montrose Beach Dunes Natural Area, Chicago (an important niche habitat for the endangered Great Lakes piping plover) in 2020 and 2024, highlighting geomorphic patterns related to rising and falling lake-level conditions.
2: GIS maps showing 2020 topobathymetric coverage of beach and nearshore areas along the Chicago coast of Lake Michigan, with inset maps showing select features of interest and the ISGS-CGG approach to geological monitoring of shoreline environments.
Michigan coast. The aim is to couple an improved understanding of offshore sand occurrence to beach geomorphic response to lakelevel variances and punctuated storm events. This requires onshore and offshore sampling to characterize materials, monitoring beach and nearshore elevations to quantify changes, and subsurface imaging for sand volumetric assessments.
Lake-bottom geology
To confidently map lake-bottom geology and quantify offshore sand volumes at a regional scale, the ISGS-CGG collected marine ‘chirper’ seismic reflection data, sediment cores and sediment grab samples in the summers of 2022 and 2023. Offshore geologic units differentiated based on this data were traced regionally using 2020 Lidar-derived DEMs and slope aspect models, which showed close agreement between (1) surface and subsurface geological sample information, (2) geophysical data resolving the ‘base of sand’ subsurface reflection, and (3) the relative smoothness of the lake bottom. In particular, the difference between sandy substrate and non-sandy substrate is manifested as a contrast between smooth and rough lake bottom ‘texture’. It is important to note that all data was acquired within a relatively short period (2020–2023), providing a ‘snapshot assessment’ of sand distribution across the Chicago littoral sand transport zone. Non-sandy nearshore substrates consist of outcrops of bedrock, many recognized by the marine biological community as ‘reef-style’ fish spawning sites, and undifferentiated sediments consisting mainly of muddy gravel-cobble deposits.
GIS-based integration of multiple corroborating surficial and subsurface geological datasets, acquired within a few years, has provided an unparalleled blueprint for regional, high-resolution delineation of nearshore sand bodies from Lidar-based bathymetric terrain models. Knowing offshore sand extent and thickness allows us to understand the role of infrastructure and bedrock morphology on alongshore sediment routing and sand sequestration patterns. This data also informs recent geomorphic patterns along the coast, including that within urban lakefront embayments containing
About the authors
Robin Mattheus is a coastal geologist with the Illinois State Geological Survey that works closely with the Illinois Coastal Management Program and the Illinois Sand Management Working Group. His current study focus is on linking coastal geomorphic development to framework geology, sand supply, human disturbances and lake hydrodynamics. Research efforts currently underway along the ~100km-long Illinois coast of SW Lake Michigan are aimed at providing data-driven insights into coastal morphodynamics to lakefront managers and various other stakeholder groups.
Mitchell Barklage is a geophysicist with the Illinois State Geological Survey and a member of the Earth Characterization Center. In addition to coastal and marine studies, he applies near-surface geophysical imaging techniques to a variety of projects including but not limited to groundwater management, underground carbon storage and astrobiology.
Liane Rosario is a geospatial data analyst with the Illinois State Geological Survey with an emphasis on shallow subsurface imaging technologies and geological sampling. Most recently, she deployed ground-penetrating radar to create sand thickness models and other interpretive maps that characterize the subsurface of the SW Lake Michigan coast.
engineered pocket beaches. Chicago’s urban beaches are shown to benefit to varying degrees from their coupling to the offshore sand resource.
Nearshore topobathymetric changes
United States federal agencies, particularly the United States Army Corps of Engineers and National Oceanic and Atmospheric Administration, strive to acquire topobathymetric Lidar data along the Illinois coast of Lake Michigan around twice per decade. This does not adequately capture nearshore and beach geomorphic changes at a sufficiently high resolution to provide coastal managers
Figure
with useful information on developmental trends. While 2008, 2012 and 2020 Lidar datasets provided insights into geomorphic patterns and sand volumetric changes associated with decadal lake-level rise from 2013–2020, the absence of such federal information since 2020 has left beach managers in Chicago with little information on developments during beach re-exposure and recovery with lake-level fall. To increase the temporal data resolution, the ISGS-CGG started supplementing federal datasets with annual topobathymetric surveys at priority sites in Chicago. These efforts, underway since 2020, involve deployment of singlebeam sonar across nearshore waters >0.5 metres in water depth, wading surveys between that coverage and the shoreline, and beach topographic assessments using small aerial drones. All geospatial data acquisition methods integrate real-time kinematic positioning technologies for cmscale precision in horizontal and vertical dimensions.
Repeat topobathymetric data coverage of the urban coastal environment, at different lake-level positions, provides the basis for investigating patterns of sand redistribution and the impacts thereon of winter ice and storms. The recent period of lake-level rise, from a historical low in 2013 to a level >1.5 metres above in 2020, was associated with coastal inundation, beach shoreline retreat and sediment accretion along backshore regions. This general geomorphic trajectory, under rising water-level conditions, was
ubiquitous to all Chicago area beaches. However, some notable differences in geomorphic response were noted. These included different degrees and directions of beach rotation, as related to influences of the surrounding infrastructure, embayment orientation and beach length. Changes across the inundated portions of coastal embayments/beaches and the nearshore, mapped by federal and ISGS-CGG datasets, are more highly variable. Patterns of change here are not easily recognized by coastal managers, but they are important to the
continued geomorphic development of beaches. Differences in sand supply and geomorphic changes across nearshore regions have had an impact on beach recovery dynamics with the 2020–2024 lakelevel fall. Beaches within coastal embayments that gained sand during the 2013–2020 lake-level rise are recovering more quickly, as seen at Montrose Beach, Chicago’s largest. Several new dune ridges have formed here since 2020, given sand influx during lakelevel rise and rapid exposure of shallowly inundated beach terrains with lake-level
Figure 4: GIS map panels for the same stretch of coast, around North Avenue Beach, showing ISGS-CGG data distribution, along with example core image, example subsurface geophysical data images, geomorphic change model (based on federal 2008 and 2020 topobathymetric Lidar data) and a map of sand thickness (based on 2020–2023 data).
Figure 3: GIS map panels showing how offshore vertical change assessments, slope maps and geological sampling and subsurface imaging aided construction of sand thickness models; example shown is lakeward of Northwestern University campus, Evanston.
Figure 5: GIS maps showing 2008–2020 vertical changes to beach and nearshore environments along the Chicago Uptown stretch of coast, which leads up to the Montrose Beach Dunes Natural Area, highlighted in a series of additional blow-up map panels showing 2020 topobathymetric DEM (from the US Army Corps of Engineers), 2023 topographic DEM (ISGS-CGG) and 2024 topographic DEM (ISGS-CGG). A vertical change model based on 2020 and 2024 DEMs is also included, which highlights major geomorphic developments with lake-level fall.
fall. This has not been the case with other beaches, particularly those that lost sand during the lake-level rise.
Guiding coastal resilience
The availability of federal Lidar-based topobathymetric elevation models, along with targeted nearshore and beach topobathymetric monitoring and regional sand assessment data, are paving the way for an improved understanding of Great Lakes coastal morphodynamics along the urban lakefront. ISGS-CGG studies to date have revealed that: (1) sand supply, which itself is time-variable, can be drastically different from beach to beach due to sand trapping against natural and/or engineered structures; (2) lake-level rise, especially if at the metre scale over sub-decadal time frames, forces a regional cross-shore and alongshore rearrangement of sand deposits by way of storm-induced profile adjustments; and (3) individual beach recovery dynamics during lake-level fall and terrain re-exposure are influenced by prior geomorphic changes across the nearshore, time-varying patterns of sand supply and beach management activities.
Understanding offshore sand distribution and alongshore transport patterns can help inform beach managers in Chicago and elsewhere along the Great Lakes on likely near-future trajectories of beach geomorphic change with anticipated future lake-level fluctuations. The shape of the urban embayment and its groins and other shoreline structures are to be considered as well. While all beach shorelines along the urban lakefront overwash and retreat when lake levels rise, beach-specific geomorphic trends across the nearshore influence the beach recovery dynamics during subsequent lake-level fall, when inundated terrains become exposed. This is when informed management action can be taken to improve coastal resilience in anticipation of the next period of lake-level rise. Historical patterns of beach geomorphic change and knowledge of offshore sand distributions serve as guides to inform decision makers on the useful placement of sand fences and re-establishment of vegetation and rebuilt dune terrains, for example. They also point to where future problems can be anticipated for a given lake-level change trajectory.
Conclusion
This regional assessment of lake margin geology and geomorphology is the first of its kind along the Chicago coast of southwest Lake Michigan, a storm-dominated margin undergoing metre-scale lake-level fluctuations that modify sand transport dynamics in ways not fully understood. The more than 20 beaches along this stretch of coast are connected, to varying degrees, to the alongshore sand transport engine and respond differently to lake-level changes and storms. Precision mapping of coastal sand distributions using Lidar, sampling and subsurface geophysical imaging methods provides a sand supply context for beach geomorphic behaviour, as captured in topobathymetric monitoring datasets. The data-integrative approach provides useful information on how urban lakefront embayments are coupled to offshore sand resources and how lake-level changes drive patterns of sand redistribution along a fragmented urban littoral zone. This information can help guide future coastal management decision-making.
Virtual models for safer seas
The digital twin of the navigable waters for smart marine navigation
Dr Mathias Jonas, Secretary-General IHO
The neologism ‘digital twin’ appeals to our intuitive understanding of a digital replica of real processes. The analogy of the twin creates the idea of great similarity – even if not complete sameness. In fact, this is exactly the point: a digital twin is a virtual representation of a material or immaterial object in the digital world that is as exact as possible. It consists of models, simulations, algorithms and services that describe the properties and behaviour of the real object.
The concept of the digital twin enables communication between the real and virtual object. Data flows from the real to the virtual object, while information flows from the virtual to the real object. By comparing and analysing the deviations between the real and virtual objects, the real objects can be adapted to each other, and processes can be regulated.
This description explains on an abstract level how future intelligent marine navigation solutions will work. If all the data on the condition of the sea areas to be navigated is available in full and can be combined with the help of models, simulations and algorithms to generate an exact digital image of this condition, the optimum route for a ship can be determined, adhered to and continuously monitored. Shipping can interact better with the harbour industry, navigation in marine protected areas can be avoided without loss of efficiency, bad weather areas can be avoided, and autonomous shipping becomes possible.
The vision of who and what the digital twin of the navigable waters can be used for already exists. However, its realization requires the necessary data to be collected, managed and made available for the aforementioned digital tools – models, simulations and algorithms – correctly and in full on a
permanent basis. Building on this, there must be smart functions that generate an overview of the current navigational situation and the resulting instructions for action without human intervention.
The generation and ongoing updating of the data is the most complex element here – to manage, process and make it available for virtual representation, it must be technically standardized so that all computers in the chain read and interpret the data in the same way.
For a digital twin to be more than just an overlay of various datasets (like seabed topography, water depths, coastal outlines, currents, weather patterns, and harbour traffic in shipping), the data streams must be integrated in a way that allows algorithms to interpret their relationships – tasks that are still largely reliant on the sailor’s expertise and experience. Of particular interest to shipping is route optimization, taking into account weather, tidal and current conditions as well as the water levels to be expected when calling at ports, which would make it possible to maximize the cargo to be transported.
To enable the required intelligent combination of all information, the various topics represented by data must be
structured in the same machine-readable way. In other words, they must be subject to an identical semantic model. This is the approach taken by the S-100 concept, which already bears this similar structuring of all data in its name: S-100 Universal Hydrographic Data Model. All data streams that are structured according to this universal model ‘understand’ each other in terms of content. The map apps installed on every mobile phone are a good example to illustrate the added value this creates. Users can plan a route without any special technical knowledge and decide whether to travel by car, train or on foot. They can find out whether there is an open petrol station along the route and whether there is a bistro or a place of interest that is worth a stop. The system automatically warns of traffic jams and suggests alternative routes, the length of which is calculated and compared with the originally selected route. All of this is based on constantly updated data streams on various topics that are standardized and linked to each other in the manner described. The S-100 data model for the maritime sector offers this approach in a framework based on ISO standards for geodata. S-100 is open source, free of charge and continuously expandable.
The core element of S-100 makes it possible to generate data product descriptions for
the various topics, which can be easily compared with the small assembly descriptions of Lego kits. The building blocks themselves are standardized, but they can be put together to form a wide variety of elements – for example houses, aeroplanes or a castle. However, unlike the assembly descriptions of Lego kits, the S-100 building instructions for data products exist digitally. Their building blocks are not physically present, have no studs or colours, but are stored in an internet-based library as digital building elements called ‘features’. The features are assigned certain properties called ‘attributes’, which individualize the features. One advantage of this concept is its expandability: if new features with different properties are needed, they are defined in accordance with the applicable basic standards, as in the physical Lego world, and registered in the online library known as the ‘registry’. An alternative analogy for describing data products would be that of containers, whose external dimensions and the way in which they are loaded with various goods are strictly standardized.
The IHO has set itself the goal of developing a series of S-100compliant data product definitions ready for use by the end of 2024. Priority will be given to those data products that are most important for route tracking. Many major IHO Member States have already
a services if such data are available with sufficient supraregional coverage in high quality and secure transmission, the development of smart functions for navigation at a previously unattainable technical level will be of interest to the marine equipment industry. The IHO is working closely with the CIRM, the association of manufacturers of marine navigation systems, among others. Further standardized digital elements of the S-100 universe are required for the implementation of the technical concept from data generation to
committed to operating regular data services to deliver this data to the shipping industry from 2026:
data transmission and data utilization for smart marine navigation denominated by IMO as e-navigation, and are also being jointly developed:
The first phase of the rollout of S-100 compliant data services will end in 2029 when S-100 compliance becomes mandatory for all new ECDIS systems. Further thematic data services are then expected to be available in a second phase.
In retrospect, it was clumsy to explicitly address hydrography in the official name of the S-100 model. Today, S-100 would probably be called the ‘Universal Marine Geodata Model’. This would be appropriate, because other maritime sectors are now also planning to generate datasets in compliance with the S-100 standard. The following cooperation partners should be mentioned here:
About the author
Dr Mathias Jonas is the secretarygeneral of the International Hydrographic Organization (IHO). Prior to this appointment he was vice president of the Federal Maritime and Hydrographic Agency and national hydrographer of Germany with responsibility for sea survey and sea cartography. Being a mariner, Dr Jonas has been involved in integrated navigation since the beginning of the 1990s. As one of the responsibilities of his current position, he is the chair of the Hydrographic Commission on Antarctica.
The core of S-100 allows for generating data product descriptions for various topics, comparable to the small assembly descriptions of Lego kits
In contrast to the hydrographic products in the narrower sense, the IHO still has a special task in enabling and coordinating these data streams in connection with the data producers. To stay with the analogy used earlier: it is not enough to define the data containers, but an incentive must be created for those who are able to regularly fill the containers and send them on their journey. This system can only succeed in close cooperation with the relevant international bodies and the industry, which must produce the tools for generating the data streams, set up regular data service provisions and define the benefits for all market participants.
When these data deliveries come together in the user’s end applications, where they are read and combined by smart software, they create the conditions for the digital twin of the navigable waters, which can then achieve in the maritime sector what we know today from car navigation and air traffic control. S-100-based systems will fulfil the expectations we are familiar with from land-based applications: we do not want to deal with the complex technical processes running in the background. Instead, we expect simple operation, comprehensible displays and reliable recommendations for action. In the final stage, these recommendations will be automatically executed as smart marine navigation and we will have sea transportation that is safe, efficient and gentle on people, nature, ships and cargo.
Progress, challenges and the path forward
Dutch developments in autonomous shipping
By Rolph Hijdra, MARIN, the Netherlands
Since the early 2010s, advancements in maritime autonomy have progressed at a steady pace. The Dutch maritime industry has, in collaboration with the Dutch government, sought to take a leading role in this, mainly by developing unmanned surface vessels (USVs) and associated regulatory frameworks. This collaborative effort has enabled the establishment of mechanisms to obtain experimentation permits, thereby facilitating trials with automated vessels closely attended by a mothership. Supported by these permits, shipowners have been able to validate the performance of their new assets and adapt and optimize their autonomous performance. The next steps towards commercial implementation are currently being taken by the Dutch government.
The diverse set of drivers behind the introduction of autonomous shipping includes – in the Dutch context – crew reduction, economic benefits, safety enhancement and greenhouse gas reduction. Exploring these in further detail, autonomous shipping reduces the crew required onboard by automating the dull, dirty and dangerous tasks. Furthermore, repositioning crew onshore improves work-life balance, which may attract more people towards the maritime industry (Figure 1). This addresses the current and anticipated shortages of available crew members. Regarding economic benefits, the deployment of smaller vessels with reduced energy consumption lowers overall costs, while a reduced crew size decreases labour costs. The integration of smart infrastructure, coupled with the absence of onboard crew, facilitates cost-effective just-in-time arrivals by reducing sailing speeds.
Autonomous shipping enhances safety as it minimizes the human errors that contribute to collisions, ship groundings, loss of life and environmental pollution, while the crew is removed from dangerous situations such as onboard firefighting. Finally, greenhouse gases are reduced as smaller vessels can be deployed with reduced energy consumption, which in turn makes the implementation of more expensive but sustainable energy sources feasible.
Despite the numerous compelling reasons for the rapid adoption of autonomous technologies in shipping, large-scale implementation remains unrealized. Besides the technical challenges, a significant barrier appears to be Dutch legislation, particularly the Inland Waterways Police Regulations (Binnenvaartpolitiereglement, BPR), which mandate the presence of an onboard skipper, preventing vessels from operating unmanned. While the drivers of unmanned shipping are applicable across the entire spectrum of shipping in the Netherlands, the current market primarily focuses on smaller USVs, which are mainly employed in survey, monitoring and inspection tasks. Consequently, recent legislative efforts concerning automated shipping have been directed towards legalizing the operations of unmanned vessels with lengths of up to 20 metres.
Dutch legislation
Dutch inland waterways shipping legislation can be divided into three main topics, each of which needs to be reviewed and adapted to enable the full integration of autonomous, unmanned operations. These concern technical requirements, the Shipping Traffic Act (Scheepvaartverkeerswet) and crewing regulations. Since the review and adaptation of these regulations are time consuming while the industry continues to develop at a rapid pace, some temporary solutions were first implemented. These date back to 2018, when the policy regulation for experiments involving highly automated navigation on national waterways was established. This regulation enables shipowners to conduct onboard experimental trials of their newly developed software and hardware for up to one year. From 2019 onwards, another policy regulation for experiments with highly automated navigation intended specifically for territorial waters was introduced with similar intentions. While use is made of these regulations, it is widely acknowledged that transitioning to full-scale commercial implementation is essential to achieve maximum benefit. In particular, USVs up to 20 metres in length have emerged as a growing market segment, frequently leading to exemption requests submitted to the Dutch government. However, no established
Figure 1: Shore control centre for monitoring and remote control of inland vessels.
mechanisms are yet in place to facilitate the market entry of these vessels.
In response to this growing USV market, the Dutch government initiated the formulation of technical requirements for USVs in late 2021 (Technisch kader varende drones), in close cooperation with the Dutch maritime industry. These requirements aim to ensure that USV operations achieve a minimum level of safety comparable to conventional operations, despite the absence of an onboard captain or skipper. In addition, obtaining exemptions to applicable traffic regulations should become more straightforward and faster However, restrictions are still in place concerning the transport of passengers and/or dangerous cargo, for obvious reasons. Several boundary conditions were considered in the setup of this document:
1. The deployment of a USV must not introduce additional safety hazards to other users of the waterway or compromise the integrity of the waterway infrastructure;
2. The USV adheres to established regulations, with deviations permitted only when unavoidable;
3. The USV exhibits conventional maritime behaviour to the greatest extent practicable;
4. Additional requirements and prerequisites for USVs are imposed only when deemed necessary to achieve a safety level equivalent to that of conventional vessels;
5. No additional regulations are established solely for the preservation of the USV itself. However, existing regulations with this intent must be adhered to at all times;
6. The new regulations will be aligned, to the greatest extent feasible, with pre-existing national and international regulatory frameworks. This approach aims to ensure coherence, minimize discrepancies and facilitate integration with established standards and protocols;
7. The new regulations are predominantly goal-based, leaving it to the USV owner or designer to ensure compliance in a practical manner.
Based on these technical requirements (Figure 2), an advisory document was developed for the Dutch government outlining an assessment framework for future exemptions. It provides guidance for authorities to assess exemption requests within the BPR for USVs up to 20 metres in length. Alternatively, if a proposed solution does not fit within the framework’s boundaries, a risk assessment may be conducted to achieve a similar safety level. This assessment framework forms the basis for the upcoming legislation for the unmanned sailing of vessels up to 20 metres on waterways. This legislation is expected to come into force by early 2025. As a result, unmanned operations on Dutch inland waterways should become feasible for USVs on a full commercial basis. For larger inland vessels, both the technical requirements and the crewing regulations still need to be developed.
International developments
Even though autonomous or remote controlled vessels are hardly seen on Dutch waterways, Dutch legislation is ahead of other countries, despite the presence of such vessels on their waterways. For instance, Belgium allows experiments and pilot studies in relation to autonomous and remote controlled sailing. To perform these, a request form that includes a concept of operations, overview of deviations from applicable legislation, risk assessment and procedure of reduction of onboard crew must be submitted to and assessed by the authorities. While several inland shipowners are performing experiments based on these grounds, this procedure is only applicable on an experimental basis and no official legislation is in place.
A similar procedure is seen in Norway, where remote controlled ferries operate in Norwegian fjords. In addition, the Yara Birkeland (a coastal container feeder) has sailed since 2022 on a low crewed basis with the intention to sail unmanned by 2025. Norway, too, has not yet established formal legislation to enable the full commercial implementation of these operations.
Figure 2: Outlines of the technical requirements set out in the ‘Technisch kader varende drones’.
The CCR (Central Commission for the Rhine) has also developed a procedure enabling experimental automated navigation projects on the waterways under its jurisdiction. The procedure can provide exemptions to existing regulations of the CCR regulations after investigation and approval of the provided risk assessment and corresponding mitigating measures.
No traffic regulation restrictions are in place to prohibit unmanned operations in Dutch territorial waters, in contrast to inland waterways. Prior to conducting these operations, permission must be obtained from the Dutch Coastguard and the USVs are escorted by a mothership in busy operational areas for technical and traffic-related reasons. This approach has already led to several successful USV operations in these waters.
In 2019, the IMO provided interim guidelines for autonomous ship trials in international waters. It also conducted a regulatory scoping exercise (RSE), which was finalized in mid-2021. The goal of this RSE was to identify the impact on existing regulations due to development of MASS (Maritime Autonomous Surface Ships). Based on the outcomes of the RSE, the goal is now to finalize and adopt a non-mandatory goal-based MASS code by mid-2025. By 2030, this code should be developed with amendments to SOLAS and adopted on a mandatory basis.
All these international developments have in common that the safety level for the vessel, other waterway users and the environment should be equivalent to that for conventional vessels. This must be proven by means of risk assessments and, where necessary, ample mitigating measures must be applied.
SMASH
As described above, the development of regulations for autonomous shipping in the Netherlands occurs through a collaborative effort between the Dutch government, industrial stakeholders and research institutes. This model of cooperation, referred to as the ‘golden triangle’, was recognized as a critical success factor as early as 2018. In response, the SMASH! initiative (https://smashnederland.nl/en/) was established, aimed at bringing together the Dutch maritime sector to promote smart shipping and enhance the Netherlands’ international competitiveness. SMASH! developed a roadmap that serves as the foundation for future collaboration on specific use
About the author
Rolph Hijdra began his career in the maritime industry in 2002, initially specializing in ship structural design and analysis. In 2018, he took on the role of research lead at C-Job Naval Architects in the field of autonomous shipping. In this capacity, he has advised the Dutch government on policy and legislation concerning USVs. Currently, he serves as project manager autonomy & decision support at the Maritime Research Institute Netherlands (MARIN) and is chairman of the Dutch work group on USVs.
cases, such as inland cargo ships, USVs and deep-sea vessels. To date, two working groups have been initiated within the SMASH! community, uniting stakeholders from the corresponding sectors to address challenges specific to their domains: inland cargo ships and USVs.
The USV work group (see Figure 3), which was established in late 2023, currently comprises over 30 stakeholders, including shipowners, classification societies, suppliers and research institutes. The work group’s objectives are to accelerate and facilitate the implementation of Dutch USVs, establish a single point of contact for advocacy on behalf of USV stakeholders, and develop the SMASH! USV roadmap, based on the prioritization set by the work group.
One of the group’s initial tasks was to provide feedback on the previously mentioned assessment framework for technical requirements of USVs. This feedback has been submitted to the Dutch government and is currently under review. At present, the work group’s primary focus is the development of a project proposal aimed at the validation and standardization of autonomous systems. After all, it is widely acknowledged that a standardized, industry-accepted methodology is essential to ensure a clear, uniform and transparent validation approach for safe autonomous operations. The project proposal is expected to be completed by the end of 2024.
Conclusion
The Dutch government, in collaboration with various industrial entities, is making significant progress towards the full commercial implementation of autonomous operations on Dutch inland waterways. The cooperation between industry, research institutes and the government has proven to be highly effective. Even though substantial efforts are still required regarding the regulatory framework for larger vessels and current legislation prohibits the carriage of passengers and hazardous cargo in autonomous operations, legislation for commercially operating USVs up to 20 metres in length is anticipated to be in place by 2025. From that moment onwards, it will be essential to start monitoring autonomous operations closely and provide operational feedback to refine and adapt legislation accordingly.
Figure 3: Delegation of the Smart Shipping Council and the USVs work group (April 2024).
High-endurance autonomous vehicles are set to transform offshore survey work
The revolutionary capabilities of nextgeneration autonomous underwater vehicles
By Layton Quinton, National Oceanography Centre, United Kingdom
Offshore survey work has long been economically and environmentally demanding. In search of a modern solution for its own oceanographic surveys, the National Oceanography Centre (NOC) has developed a revolutionary autonomous underwater vehicle (AUV) range known as ‘NOC Autosub’ vehicles. These AUVs have the capability to operate in some of the deepest and most remote parts of the ocean. One particular variant, the NOC Autosub Long Range vehicle, can operate without the need for specialist launch and recovery equipment and, for less remote locations, without the need for a support vessel at all. This transformative technology is opening up new possibilities for offshore work that is traditionally completed by crewed vessels.
The first NOC Autosub vehicle missions took place in 1997. Since then, NOC Autosub AUVs have been used extensively for ocean research in remote and hostile environments where endurance, reliability and the ability to operate independently with little or no vessel support are essential requirements. To accommodate continuously changing research demands, NOC Autosubs have been designed to provide excellent power and flexibility for different chemical sensor payloads and imaging equipment.
The NOC Autosub Long Range is an electrically powered underwater vehicle that operates at depths of up to 1,500m or 6,000m (dependent on vehicle variant) and can carry a sensor package with different options such as sidescan multibeam, subbottom profiler or a camera system. The AUV can also be equipped with a flexible package of additional chemical sensors separate to its own navigation sensors and equipment. The vehicle itself is engineered to have a dry weight of less than one ton and maximum length of 4.2m, ensuring that it is easily handled with a single point lift.
Since navigational accuracy of the vehicle is crucial in many applications, NOC Autosub 5 features an underwater navigation system which, when in survey mode and achieving a bottom lock, is accurate to within 0.05%
error for distance travelled. When the vehicle surfaces, any deviation is corrected via GPS. Where greater navigational accuracy is required, an acoustic modem on the vehicle works with ultra-short baseline (USBL)
The NOC Autosub Long Range vehicle operates without the need for dedicated launch and recovery equipment.
NOC Autosub vehicles, with their long endurance, are suited for deepwater surveys, construction support, marine archaeology, oceanography, and search and recovery.
acoustic technology, offering the highest performance in positioning accuracy for applications such as surveying pipelines or cables.
How proven and mature is the technology?
The NOC Autosub has been used extensively for scientific research and understanding the ocean around the globe for several years, including successful operations under ice. A recent mission comprised of surveying a decommissioned oil installation in the North Sea demonstrated the success of using NOC Autosub’s hightech, low-impact monitoring capabilities to detect environmental impacts at the sites. During these surveys, the vehicle was shore launched and recovered, undertaking a 400km total commute and marking a major milestone in the ambition of supporting the industry transition towards net zero targets.
NOC Autosub has also completed survey work within marine protected areas, capturing over 40,000 seafloor images using a high-specification camera system. The vehicle was able to generate georeferenced, colour-corrected conventional still images, as well as texture maps and corresponding microtopographic maps of the seafloor. This was a triumphant demonstration of the vehicle’s ability to operate very close to the seabed, providing more superior seafloor mapping data than comparable systems usually deployed by wire from a survey ship. These missions clearly demonstrated the commercial viability of the vehicle and made a clear case for NOC to invest in building additional vehicles for use in scientific research.
A solution for today’s challenges
Vehicles that have the endurance of NOC Autosub lend themselves to a wide range of applications such as deepwater geophysical survey, construction support, marine archaeology, oceanography and search and recovery.
For many, the major benefit of this technology is the fact that it can often be shore launched and recovered without the need of a vessel, which means it can provide both a more cost-effective and
environmentally friendly solution than the traditional alternative of a crewed vessel with remotely operated underwater or survey equipment. Furthermore, with its ability to stay close to the seafloor, NOC Autosub is well insulated from adverse weather conditions that might disrupt alternative survey solutions.
While the NOC Autosub has completed continuous operations over long periods, mission duration is ultimately dependent on the power requirements of the final sensor package, with two to three weeks being the typical range for normal survey applications. The vehicle will typically surface daily to send data and is also able to receive any new piloting instructions when surfaced, if so required.
Challenges to the adoption of AUV technology
While AUVs may not form a viable solution for every application, many of the existing challenges of the technology are perceptual. First, there can be concerns about the lack of near-real-time data processing. When survey data is traditionally collected on board a vessel, imagery can be processed and reviewed on the fly and small adjustments made to ensure both the quality and coverage of the data are sufficient. It is true that with a vehicle such as NOC Autosub Long Range, much of its sensor data is only downloadable to process when it is recovered at the end of its mission. In practice, however, the vehicle’s ability to fly accurately on course and close to the seabed tends to ensure extremely high-quality results.
Second, there is the perception that both surface and underwater autonomous vehicles could be more impacted by adverse weather than traditional methods. When it comes to NOC Autosub Long Range, this is less of a concern as the vehicle can be operated in low power mode or utilize its own recently developed anchoring system to wait out extreme weather if required.
Finally, survey operators and customers are reluctant to move from traditional and established solutions using conventional vessels to trialling new autonomous equipment. Changing the mindset is a difficult obstacle to overcome, but with any technology there will be early adopters and those who choose to adopt later. Running parallel to this however is the unrelenting demand for more environmentally friendly solutions. This is becoming more and more prevalent as survey work supporting green initiatives continues to grow and these clients are likely to favour greener survey solutions.
The wider autonomous underwater market
As a wide range of AUVs are available with different sizes and pricing points, it is important to have some broad understanding of how to consider and categorize different offers. Autonomous underwater vehicles can broadly be broken down into categories based on their size, payload, depth rating and endurance. Any AUV design will be a compromise of these factors. Ignoring for now the very large underwater autonomous vehicles used predominantly for defence applications, at the smallest scale micro AUVs and then personportable AUVs are both designed for short-range missions with low current drain sensors. Next in size are long-range AUVs such as NOC Autosub Long Range, and finally there are work-class AUVs – large, high-power vehicles such as the NOC Autosub 5. Work-class AUVs are capable of powering multiple high-resolution sensors that demand considerable power.
The NOC Autosub 5, a ‘big brother’ to the Autosub Long Range, was developed over the same period and is well proven for operations requiring higher power sensors and faster operations (cruise speed typically 1.4m/s). Its primary objective is to be launched from a ship to image the seabed in high resolution by operating multibeams used for topographic mapping, sidescan sonars used for acoustic imaging of the seabed, sub-bottom profilers used to see what is in the first few metres under the seabed, and camera systems. The sixmetre, two-ton vehicle is able to explore depths up to 6,000m with a 300km range and 72-hour endurance. It is launched and recovered using NOC’s winch davit launch and recovery system, which allows operation in the open ocean, up to sea state 4.
This vast difference in size, payload, depth rating and endurance is important to recognize when considering which AUV best suits specific survey applications.
Conclusion
AUV technology now offers new opportunities to conduct surveys in all types of applications, including bathymetric, hydrographic, archaeological and ecological surveys. The vehicles provide a safe and reliable route to inspect and assess engineering structures, construction sites, pipelines and cables. Since there are many autonomous vehicle types and options available in a ‘noisy’ market, careful research is required for operators to pick vehicles that best suit their requirements. There are likely to be different adoption rates to using both underwater and autonomous surface
Layton Quinton
Layton Quinton is head of Marine Information Products and Services at the National Oceanographic Centre (NOC). Layton has over 20 years of experience in the development and launch of new products and a particular passion for technology that brings cutting-edge science to solving real world problems. Prior to working at NOC, Layton worked internationally across multiple time zones leading teams to develop new cloud software products using AGILE working practices.
technology compared with more conventional survey approaches, and this may prove to be an important differentiator and competitive advantage both from carbon reduction and operational capability perspectives.
Ultimately, these revolutionary vehicles present a golden opportunity to modernize offshore survey work and to increase the quality and quantity of data being gathered from the ocean.
About the author
The NOC Autosub 5, a ‘big brother’ to the Autosub Long Range, with the Autosub Hover shown in the insert.
Ping rate (range dependent) Up to 50 pings/s Pulse length 15-300ms (CW) 300ms - 20ms (FM)
Depth resolution 6mm
With the addition of the Teledyne RESON SeaBat T20-S MBES Module, GAVIA AUVs are a powerful platform for gathering cost effective, high-resolution bathymetric data from vessels of opportunity. The modular design of the Gavia, combined with an array of sensor options including SAS, SBP, Magnotometer, SSS, Camera and now multibeam, ensure these AUVs are perfectly suited for a variety of commercial, military and scientific applications.
Our Passion Runs Deep
T20-S for the Gavia AUV
Osprey AUV
SeaRaptor AUV
SONOBOT 5
uncrewed surface vehicle
• Autonomous and remotely-controlled operation
• Exchangeable battery packs for 9+ hours of operation
• System software for planning, execution and data evaluation
• Accurate georeferenced bathymetry and cartography missions, search and survey in hard-to-reach areas
• High-precision measurements and recordings, different GNSS and sonar options available
• Data logging and real-time acquisition over redundant mesh network
• Rapid system deployment, excellent maneuverability and area coverage with powerful and efficient drives
• AI-based object recognition for side-scan sonar: objects of interest are detected and highlighted live during the mission
Meet us at HYDRO 2024 5 - 7 November Rostock, Germany