Drodzy Czytelnicy,
3
Redaktor naczelny kwartalnika Pomiary Automatyka Robotyka
4 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Aby ocenić, jaki wpływ będą miały roboty na społeczeństwo, należy skrupulatnie przeanalizować obecny stan wiedzy, a w szczególności wskazać fundamentalne problemy, które jeszcze nie zostały rozwiązane, mające istotne znaczenie dla potencjalnych zmian społecznych powodowanych rozwojem robotyki. Wspomniany wpływ zależy od inteligencji robotów, więc ten aspekt dominuje w przedstawionej tu analizie. Rozważania zostały podzielone na trzy części:
1) analizę czynników technicznych wpływających na inteligencję i bezpieczeństwo robotów,
2) analizę obecnych możliwości robotów, 3) analizę przewidywań dotyczących rozwoju robotyki, a w konsekwencji poglądów na skutki tego rozwoju dla społeczeństwa. Niniejszy artykuł poświęcony jest drugiemu z wymienionych tu trzech zagadnień.
W pierwszej części artykułu przedstawiono czynniki, które mają wpływ na inteligencję i bezpieczeństwo robotów, bo to one determinują akceptację społeczną tych urządzeń. Ponadto właśnie te czynniki określają możliwość wykorzystania robotów w usługach oraz do wspomagania ludzi w ich życiu codziennym. To przydatność robotów i ekonomia przesądzają o chęci konstruowania i korzystania z tych automatów. Oczywiście istnieje jeszcze jeden czynnik – poznawczy, który tu traktuję marginalnie. Starając się uczynić roboty inteligentnymi i autonomicznymi wnikamy coraz głębiej w istotę inteligencji, a więc coraz bardziej poznajemy siebie samych, a w szczególności wnikamy w sposób funkcjonowania naszego organizmu oraz zachowania nas samych w naszym otoczeniu.
W tej części artykułu zostanie przeanalizowany obecny stan rozwoju robotów oraz dotychczasowe tempo zmian. Ponadto pokazane będzie, jak czynniki wpływające na rozwój robotów inteligentnych, przedstawione w pierwszej części artykułu, zostały wykorzystane do tworzenia obecnych robotów. Na tej podstawie można wskazać ograniczenia obecnej technologii oraz próbować ekstrapolować, jaki będzie dalszy rozwój tych maszyn.

Wiele klasycznych zagadnień rozpatrywanych na gruncie robotyki znalazło już zadowalające rozwiązania. Przykładowo, wiadomo, jak należy konstruować manipulatory, by uzyskać analityczne rozwiązanie prostego i odwrotnego zagadnienia kinematyki. Dynamika manipulatorów czy klasyczne metody sterowania tymi urządzeniami też są dobrze poznane. Nie nastręczają problemów konstruktorom: sterowanie pozycyjne, projektowanie manipulatorów o sztywnych członach, budowa kołowych baz mobilnych przemieszczających się po płaskich horyzontalnych powierzchniach czy konstrukcja mechaniczna wielu składowych części robotów oraz podstawowe czujniki, silniki i siłowniki czy elementy przeniesienia napędu. Nie oznacza to, że w tych dziedzinach nie są prowadzone badania, ale to, że spodziewamy się tu co najwyżej udoskonalenia obecnych rozwiązań technicznych, czyli osiągnięć inkrementalnych, a nie przełomowych. Nie tutaj leżą główne problemy do przezwyciężenia przez robotyków. Niemniej jednak w klasycznej robotyce nadal spodziewamy się ulepszeń w takich dziedzinach jak: miniaturyzacja sztywnych elementów konstrukcji, wykorzystanie lżejszych materiałów, zwiększenie udźwigu i szybkości robotów. Struktury sprzętowe układów sterowania bazują na współczesnych komputerach i sterownikach ruchu, a więc postęp w tej materii głównie napędzany jest osiągnięciami producentów tego sprzętu, a nie samych robotyków.
Ponadto istnieje sfera badań, które doprowadziły do powstania bardzo zaawansowanych rozwiązań, ale nadal nie są to technologie, które uważa się za wystarczająco rozwinięte. Dalszych badań wymagają: maszyny kroczące i wspinające się, chwytaki, w szczególności wielopalczaste, a przede wszystkim zastosowanie sztucznej inteligencji w sterowaniu robotami. W szczególności percepcja maszynowa wymaga rozwiązania problemu kotwiczenia, a więc asocjacji pojęć symbolicznych z informa-
5 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 5–18, DOI: 10.14313/PAR_247/5
cją bezpośrednio zawartą w sygnałach uzyskanych z czujników. Uczenie maszynowe oraz przetwarzanie wielkich zbiorów danych (big data) są innymi zagadnieniami badanymi na gruncie szeroko rozumianej sztucznej inteligencji. Uzyskane rozwiązania zostaną inkorporowane do sterowników robotów. Źródłem wielkich zbiorów danych są przede wszystkim własne czujniki robotów, ale również zasoby Internetu i te zawarte w chmurach obliczeniowych.
Już powyższy, dość wyrywkowy przegląd zagadnień będących przedmiotem zainteresowania robotyków, wskazuje na rozległość prowadzonych prac badawczych. Wyczerpujący wgląd zarówno w zastosowania robotów, jak i w ich konstrukcję nie jest możliwy w ograniczonych ramach tego artykułu. Niemniej jednak trzeba przynajmniej przeprowadzić powierzchowny przegląd, wskazujący na obecne możliwości robotyki, by prawidłowo ocenić, jaki wpływ będą miały na społeczeństwo roboty w niezbyt odległej przyszłości. Warto też spojrzeć wstecz, by ocenić, jaki postęp dokonał się w tej dziedzinie w ciągu ostatnich dziesięcioleci. To pozwoli ocenić tempo zachodzących zmian.
By ułatwić dyskusję, należy podzielić roboty na pewne kategorie. W pierwszej części tego artykułu przyjęto, jako kryterium podziału robotów, stopień strukturyzacji, a więc uporządkowania środowiska, w którym dany robot działa. Ta kategoryzacja zostanie tu wykorzystana.
Robotyka swój komercyjny sukces zawdzięcza szerokim zastosowaniom w przemyśle. Od zaprezentowania przez firmę Unimation w 1961 r. [59] pierwszego robota przemysłowego, o nazwie Unimate, osiągi tych urządzeń znacznie się zwiększyły. Za przykład niech posłuży relacja udźwigu do masy manipulatora. Następca wspomnianego robota Unimate z 1972 r., także dysponował napędem hydraulicznym oraz pięcioma stopniami swobody, a miał masę 1700 kg i udźwig 12 kG [19]. Opracowany przez firmę ASEA pierwszy robot o napędach elektrycznych, był produkowany w latach 1975–1992, też miał 5 stopni swobody, ale masę tylko 125 kg i udźwig 6 kG, podczas gdy opracowany wspólnie z DLR w 2006 roku LWR (Light Weight Robot) firmy Kuka, mający siedem stopni swobody, ma masę 16 kg i udźwig 7 kG. Tak się stało mimo to, że moc z jednostkowej masy napędu dla silników elektrycznych jest w granicach 25–150 W/kg, a dla siłowników hydraulicznych 650 W/kg [38]. Wszakże od czasu pojawienia się LWR niewiele się zmieniło –nastąpiło nasycenie. Nawet sześcioosiowy kobot wprowadzony na rynek przez Universal Robots w 2008 r., który z natury rzeczy powinien być lekki, ma udźwig 5 kG, a masę 18 kg. Wprawdzie postęp jest znaczny, ale niestety wypada blado na tle nawet niezbyt atletycznie zbudowanego mężczyzny, którego masa ramienia wynosi 5 kg [8], natomiast udźwig 20 kG [21].
Ponieważ pierwsze roboty były bardzo ubogo wyposażone w czujniki, wymuszało to dostosowanie linii produkcyjnych do współpracy z robotami. Oznaczało to precyzyjne usytuowanie wszystkich urządzeń współpracujących z robotem oraz odgrodzenie robota od ludzi. Wejście człowieka w strefę ruchu robota powodowało automatyczne jego wyłączenie. To podejście obecnie ulega zasadniczej zmianie.
Wspomniane już wcześniej koboty mają bezpośrednio współpracować z robotnikami, więc ich odgrodzenie od ludzi nie jest możliwe. Pierwotnie kobotami nazwano roboty, które ograniczały możliwość odejścia z zaplanowanej ścieżki ruchu, ale dopuszczały dowolną modyfikację zachowania się wzdłuż tej ścieżki [25, 56, 62]. Ruch prostopadły do ścieżki był ograniczony, natomiast ten wzdłuż niej mógł być dowolnie kształtowany przez samego kobota albo operatora z nim współpracującego. Definicje ścieżki określały wirtualne powierzchnie ograniczające swobodę ruchu. Obecnie pojęcie kobota zostało rozszerzone na urządzenia, które nie tylko ograniczają możliwość wykonania niewłaściwych ruchów, ale również wykrywają
intencje operatora. Zamontowanie czujników sił i momentów sił umożliwia wykrycie kierunku ruchu przedmiotu wspólnie przenoszonego z człowiekiem. Wirtualne powierzchnie ograniczają niepożądane ruchy, natomiast precyzyjne ustawienie obiektu oraz prędkość jego ruchu jest określana przez operatora. Bezpieczeństwo robotników współpracujących z kobotami zapewniane jest przez: dodatkowe czujniki, redukcję masy ramienia, brak ostrych krawędzi na obudowie, zmniejszenie mocy silników oraz pokrycie ramienia materiałami miękkimi.
Koboty wymagają również zmiany podejścia do programowania robotów. Hybrydowe metody programowania polegające na zastosowaniu tekstowego języka oraz wprowadzaniu wybranych pozycji ramienia z wykorzystaniem robota zainstalowanego na linii produkcyjnej (wodzenie ramienia) [78] nadal są wykorzystywane przez koboty, ale w zmodyfikowanej postaci. Panel dotykowy służący do programowania kobota korzysta z okienkowego interfejsu z językiem ikonicznym, ale zwiększono rolę wodzenia ramienia. W odróżnieniu od klasycznych robotów przemysłowych, dzięki czujnikom, koboty automatycznie zwalniają, a w razie potrzeby zatrzymują się, gdy niespodziewanie pojawi się człowiek. Operator w trakcie pracy kobota może przerywać lub korygować jego ruchy, co umożliwia wspólne przemieszczanie ciężkich przedmiotów do niezbyt precyzyjnie określonych pozycji docelowych. Do prostego współdziałania z ludźmi pracującymi przy linii produkcyjnej wystarcza, że robot nie narusza stref, gdzie może znajdować się człowiek lub ruchome części urządzeń – jest to zachowanie pasywne.
Najbardziej zaawansowanym kobotem jest Robonaut 2 (R2) [10] stworzony we współpracy między NASA i General Motors (GM). Początkowo był to dwuramienny tors z ruchomą głową, który współpracował z astronautami na Międzynarodowej Stacji Kosmicznej w latach 2011–2018. W 2014 r. dodano mu dwie nogi zakończone chwytakami zamiast stóp. Przeznaczony był do wykonywania wewnątrz stacji kosmicznej prac wymagających zręczności. Dwa ramiona robota mają po siedem stopni swobody, nogi również po siedem, szyja, na której posadowiono głowę z kamerami, ma trzy stopnie swobody. Jego chwytaki to pięciopalczaste dłonie przypominające ludzkie, z czujnikami dotyku na każdym końcu palca. Palce dłoni łącznie mają 12 stopni swobody: cztery kciuk, dwa palce najbliższe kciuka po trzy, a dwa pozostałe po jednym. Zdecydowano się na tak skomplikowaną konstrukcję dłoni, by robot był w stanie wykorzystywać te same narzędzia, co astronauci. Sześcioosiowe czujniki sił i momentów sił są zainstalowane zarówno w nadgarstku jak i barku. W głowie zainstalowana jest stereo-para kamer. W rzeczywistości głowa zawiera cztery kamery, a więc redundantną konfigurację w celu zwiększenia niezawodności. Dodatkowo ma kamerę czułą na promieniowanie podczerwone. Służy ona do pomiaru odległości do oglądanych obiektów. Sterowanie tym urządzeniem wymaga 38 procesorów Power PC. Spowodowane jest to zarówno licznością stopni swobody, jak i rozbudowanym układem percepcji oraz koniecznością planowania czynności, w szczególności tych wymagających dwuręczności, oraz koniecznością zapewnienia bezpieczeństwa działania. Ograniczenie sił dynamicznych wytwarzanych przez człony o dużej masie zapewniane jest przez zastosowanie w sterowaniu jakobianu z wagami zależnymi od mas członów [9]. Robonaut został stworzony, by zbadać na ile robot może być pomocny astronautom. Przeznaczony był do autonomicznego wykonywania prac wymagających zręczności, np. wymiany paneli elektronicznych, ale możliwe było też teleoperowanie nim albo ze stacji kosmicznej albo z Ziemi. Wizja i czucie siły umożliwiały bezpieczne współdziałanie z astronautami. Firma GM zaangażowała się w projekt, bo spodziewa się, że tego typu roboty będą w stanie wykonywać w fabrykach autonomicznie powtarzalne, nudne lub niebezpieczne zadania, przy ewentualnej drobnej ingerencji współdziałających ludzi.
6 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Obecnie prowadzi się badania nad kobotami, które mają oceniać intencje osób, dzięki czemu koboty będą mogły nie tylko unikać kolizji, ale również aktywnie współdziałać z ludźmi. Do tego jednak zestaw receptorów kobota musi być dużo bardziej różnorodny. Potrzebne są kamery do obserwacji ludzi oraz mikrofony, aby można było wydawać mu polecenia głosem. Pokazuje to, że różnice między kobotami stosowanymi w przemyśle i robotami usługowymi stopniowo się zacierają.
Roboty przemysłowe zaludniły (a może zarobotowiły?)
też magazyny wysokiego składowania. Supermarket on-line Ocado dostarcza produkty spożywcze zamawiane przez klientów indywidualnych. W tym celu firma ta opracowała zautomatyzowane magazyny obsługiwane przez roboty różnego typu [72]. Interwencja ludzka ograniczona jest do minimum, więc magazyn wygląda jak gigantyczny ul zamieszkały przez setki robotów i wyposażony w kilometry taśmociągów. Algorytmy podobne do tych używanych w lotnictwie determinują, jak roboty maja się poruszać, by uniknąć kolizji i optymalnie zgromadzić towary będące przedmiotem zamówienia. Sercem magazynu są stosy pojemników. Stosy zawierają do 17 pojemników. Specjalny algorytm ustala kolejność pojemników na stosie. Pojemniki zawierające różne produkty mogą być umieszczone na tym samym stosie. Pojemniki z towarem często zamawianym lokowane są na szczycie stosu. Jeżeli potrzebne są te ze spodu roboty usuwają pojemniki z wierzchu przestawiając je na inne stosy. Roboty przemieszczają się nad stosami pojemników. Mogą poruszać się tylko w dwóch prostopadłych kierunkach o kwant równy szerokości stosu. Do swego wnętrza mogą wciągnąć pojemnik wypełniony produktami jednego rodzaju. Pojemnik dostarczany jest do stacji załadunkowej, w której to już ludzie zestawiają i pakują konkretne zamówienie znów do pojemników. Pojemniki z nie w pełni zestawionymi zamówieniami znów trafiają do magazynu, by się pojawić w stacji załadunkowej, gdy w nim będą dostępne potrzebne towary. Człowiek instruowany jest, co ma zrobić, przez komputer wyświetlający na ekranie zestaw poleceń. Prowadzone są badania, których celem jest zastąpienie i tych ludzi przez roboty. Niemniej jednak trzeba wpierw rozwiązać problem chwytania delikatnych towarów o nieregularnych kształtach. Do tego celu niestety nie nadają się chwytaki podciśnieniowe, więc bada się chwytaki wykonane z miękkiej gumy, które nadmuchiwane są w celu realizacji chwytu. Pojemniki lokowane są na stosach przez system taśmociągów odbierających towar przywożony do magazynu. Gdy zamówienie zostało skompletowane taśmociągi dostarczają pojemnik do stacji wysyłkowej. Centralny komputer koordynuje pracę wszystkich urządzeń w magazynie komunikując się z nimi za pomocą technologii 4G, ale w innym paśmie niż to czynią sieci telekomunikacyjne. Magazyny tego typu są skalowalne, liczba stosów i robotów może być różna w różnych magazynach, a ponadto są odporne na awarie robotów – zadania uszkodzonego robota wykonywane są przez innego robota. Oczywiście uszkodzonego robota musi usunąć z magazynu robot ewakuacyjny, ale naprawy dokonują już ludzie. Głównym zyskiem nie jest redukcja zatrudnienia, ale zmniejszenie powierzchni magazynowej, brak konieczności oświetlania i wentylowania pomieszczeń zgodnie z wymaganiami BHP oraz utrzymywania temperatury akceptowalnej przez ludzi.
się to dużo wcześniej – ze względu na nieefektywność ekonomiczną systemu niewolniczego.
Jak już wcześniej wspomniano, kategoria robotów usługowych obejmuje sobą bardzo szeroka gamę urządzeń, poczynając od odkurzaczy, a kończąc na kompanach człowieka. Warto się przyjrzeć tej różnorodności nieco dokładniej, by zrozumieć, czemu proste roboty usługowe są sprzedawane na masową skalę, natomiast roboty kompani człowieka wymagają jeszcze intensywnych badań.
Posiadanie maszyn zaspokajających nasze wszelkie potrzeby było od wieków marzeniem ludzi, a obecne statystyki wskazują, że dynamiczny wzrost liczby zarówno jednostek jak i typów produkowanych robotów usługowych szybko przybliża nas do spełnienia tej wizji [77]. Arystoteles w swym dziele Polityka przewidywał zmierzch niewolnictwa, gdy tylko pojawią się maszyny zastępujące pracę niewolników [77]. Szczęśliwie stało
Powszechnie stosowanymi robotami osobistymi są autonomiczne odkurzacze (np. Roomba) czy kosiarki do trawników przydomowych (np. Automower). Urządzenia te dysponują czujnikami umożliwiającymi nawigację z omijaniem przeszkód. Zestaw posiadanych czujników wpływa na cenę urządzenia, ale też na jakość sprzątania. Najprostsze wersje odkurzaczy do wykrywania przeszkód używają czujników dotyku lub czujników zbliżeniowych na podczerwień (IR). Informują one układ sterowania o konieczności wykonania skrętu przez platformę mobilną. Ponadto czujniki IR stosowane są do wykrywania gwałtownego obniżenia terenu. Zapobiega to spadnięciu ze schodów lub wjechaniu do rowu. Często odkurzacze dysponują też czujnikami wykrywającymi bariery świetlne, co umożliwia wykluczenie pewnych obszarów ze sprzątania, np. takie, które zawierają cenne przedmioty, które nie powinny być potrącane. Roboty te, gdy wykryją, że stan naładowania ich baterii jest niski, przerywają pracę i jadą do stacji ładowania, którą wykrywają dzięki sygnałom podczerwonym emitowanym przez tę stację. Układ sterowania najprostszych wersji nie jest zbyt wyrafinowany. Prócz omijania przeszkód i nieprzekraczania kurtyn IR zadaniem robota jest takie poruszanie się, by w miarę możliwości pokryć całą sprzątaną lub koszoną powierzchnię. Do tego celu wykorzystywane są algorytmy generujące ścieżkę: spiralną, losową, ruchu kuli bilardowej odbijającej się od ścian. W przypadku wyposażenia w czujniki IR, robot może poruszać się wzdłuż ścian. Najczęściej stosuje się różne kombinacje tych algorytmów. Algorytmy te nie korzystają z mapy pomieszczenia. W wersjach rozbudowanych roboty wyposażane są w kamery lub dalmierze laserowe IR, co umożliwia zbieranie danych o topografii sprzątanego pomieszczenia. Wtedy robot tworzy mapę i na jej podstawie generuje odpowiednią trajektorię ruchu. Niestety roboty wyposażone w kamery nie mogą tworzyć mapy w ciemnościach, natomiast te wykorzystujące lasery maja problemy z lustrami oraz powierzchniami silnie pochłaniającymi promieniowanie IR. Ponadto odkurzacze mogą być aktywowane o określonych porach dnia lub tygodnia. Wyposażane są też w czujniki wykrywające ilość kurzu wlatującego do dyszy. Najczęściej do tego celu zanieczyszczone powietrze kierowane jest na płytkę metalową. Kurz wprawia ją w drgania. Im amplituda drgań jest większa tym brudniejsza jest podłoga, a więc w tym miejscu robot powinien pozostać dłużej. Pomimo tego bogactwa czujników i zachowań robota, urządzenia tego typu nadal nie radzą sobie we wszystkich sytuacjach. Czasami zdarza im się utknąć pod niskim meblem, co wymaga interwencji człowieka. Niemniej jednak powszechna niechęć do sprzątania, traktowanego jako zajęcie nudne, oraz spadające ceny tych urządzeń spowodowały ich upowszechnienie. Należy się spodziewać, że podobnie będzie z robotami usługowymi, które są obecnie na etapie badań. Wszakże należy zauważyć, że odkurzacze operują niezmiernie uproszczonym modelem otoczenia. Ich ontologia rozróżnia tylko pustą przestrzeń, nadającą się do poruszania, i przeszkody. Takim robotom jest obojętne, czy zderzą się z krzesłem, czy ze ścianą. Reakcja powinna być identyczna. Roboty usługowe, które mają wykonywać bardziej wyrafinowane zadania wymagają o wiele bardziej skomplikowanego modelu otoczenia. To w istotny sposób komplikuje układ
7
sterowania. Algorytmy umożliwiające pracę w otoczeniu, które przystosowane jest do funkcjonowania ludzi, są o wiele bardziej skomplikowane i dlatego są nadal w fazie badań. Niemniej jednak czynione są tu szybkie postępy.
Usługi logistyczne wymagają operowania wielką różnorodnością towarów, które zazwyczaj muszą być pakowane, a do tego potrzebne są uniwersalne chwytaki i odpowiednio szybkie metody rozpoznawania i lokalizacji obiektów. Obiekty te mogą być duże lub małe, mieć dowolne kształty, mogą być miękkie lub twarde, kruche lub solidne. W związku z tym w latach 2015–2017 urządzane były coroczne zawody Amazon Robotics Challenge [17]. Dla firmy wysyłkowej, jaką jest Amazon, zautomatyzowanie kompletacji zamówień jest kluczowe. Zadaniem zespołów biorących udział w tych zawodach było zaprojektowanie robota, który byłby w stanie rozpoznać i zlokalizować obiekt znajdujący się wśród innych, a następnie uchwycić go i włożyć do kartonowego pudła. Pierwsze zawody z tego cyklu wymagały, aby w czasie nie większym niż 20 minut zdjąć z półki 12 spośród 24 obiektów i umieścić je w pudle. Zniszczenie przedmiotów lub umieszczenie w pudle niewłaściwego obiektu było karane ujemnymi punktami. Obrazy 2D i 3D obiektów były udostępnione konkurującym zespołom przed zawodami. W kolejnych zawodach liczba obiektów była zwiększana, a czas wykonania zadania skracany. Jedne obiekty mogły przysłaniać inne. W 2017 r. dopuszczono własną konstrukcję regału z przedmiotami, co doprowadziło do preferowania pojemników, z których wyjmowano i do których wstawiano obiekty od góry. Ponadto tym razem niektóre z przedmiotów zespoły poznały dopiero na 30 minut przed rozpoczęciem zawodów. Utrudniło to wykorzystanie sieci neuronowych, których użycie wymaga długotrwałego uczenia. Przy tak wydawałoby się nietrudnym zadaniu zespoły nie były w stanie zrealizować zadania w całości, a duża ich część w ogóle nie umieściła żadnego przedmiotu w pudle. Niemniej jednak, mimo wprowadzania utrudnień, z zawodów na zawody wyniki były coraz lepsze. Większość zespołów wyposażyła swoje roboty zarówno w kamery RGB, jak i RGB-D. W rozpoznawaniu obrazów dominowały sieci neuronowe, w szczególności konwolucyjne, których obliczenia wykonywane były na wielu jednostkach graficznych (GPU). Postępy w percepcji były znaczne, natomiast nie dopracowano się uniwersalnego chwytaka o zdolnościach porównywalnych z tymi, jaki posiada ludzka dłoń. Większość zespołów używała kombinacji chwytaka podciśnieniowego (przyssawki) z chwytakiem dwupalczastym. Zespół, który wygrał w 2017 r., wyjął ze sterty 14 wskazanych przedmiotów i odłożył je do pudła, a ponadto wyjął dziewięć obiektów z miejsca składowania, wszystko w ciągu 27 minut [58].
W większości krajów wysoko rozwiniętych populacja ludzi w wieku poprodukcyjnym w stosunku do tych czynnych zawodowo stale wzrasta [48]. Jest to związane z poprawą jakości służby zdrowia, redukcją liczby urodzeń oraz utrzymywaniem relatywnie niskiego wieku emerytalnego. Zapewnienie odpowiedniej opieki ludziom starszym wymaga od rodziny, jeżeli istnieje, ograniczenia swej aktywności zarobkowej, albo zatrudnienie pomocy domowej o odpowiednich kwalifikacjach. Część krajów rozwiązuje ten problem zezwalając na osiedlanie się migrantów. Tam, gdzie nastawienie do migrantów jest negatywne, jedynym rozwiązaniem jest wytworzenie lub zakup robotów usługowych zwanych kompanami. Już obecnie sztuczna inteligencja umożliwia seniorom wspomaganie pamięci. Firma Intuition Robotics skonstruowała urządzenie nazwane ElliQ, które może być używane przez ludzi do nawiązywania kontaktu z innymi przez Internet, przypominania o harmonogramie dnia lub lekarstwach do wzięcia. Interakcja z nim odbywa się za pomocą mówionego języka naturalnego. Japoński robot terapeutyczny Paro,
przypominający wyglądem pluszową zabawkę imitującą małą fokę, uczy się interakcji z człowiekiem. Dzięki czujnikom rozpoznaje kontekst sytuacyjny i stara się w zależności od niego albo absorbować uwagę człowieka albo nie przeszkadzać. Ten rodzaj zabawki imitującej małe zwierzę ma istotny wpływ na redukcję stresu i dlatego jest również stosowany w szpitalach.
Ludzie starsi nie akceptują zmian wprowadzanych do ich domów, więc ich kompani muszą być dostosowani do operowania w warunkach domowych, jakie zastaną. Zmiana wyposażenia lub wyglądu mieszkania raczej nie wchodzi w rachubę. Środowisko domowe wymaga dwuręczności, postrzegania wzrokowego i dotykowego, umiejętności przemieszczania się w pomieszczeniach z przeszkodami, rozumienia funkcji poszczególnych pomieszczeń oraz przedmiotów znajdujących się w nich, etc. Stąd konstrukcyjnie muszą przypominać ludzi, a więc preferowane są roboty humanoidalne. Ponadto roboty tego typu nie tylko muszą być w stanie prowadzić konwersację na odpowiednim poziomie, ale również dostosowywać się do charakteru i aktualnego stanu emocjonalnego interlokutora. Na marginesie warto zauważyć, że roboty tego typu mogą być również stosowane jako cierpliwi opiekunowie dzieci.
W 2022 r. Elon Musk przedstawił robota humanoidalnego Optimus, stanowiącego wstępny prototyp urządzenia, które Tesla ma produkować w milionach egzemplarzy [6]. Na tle możliwości innych robotów humanoidalnych nie wypada on najlepiej, ale biorąc pod uwagę, że został skonstruowany w niespełna rok i to, że tworzony jest z myślą o produkcji, przy wykorzystaniu tej samej technologii, która jest stosowana przy wytwarzaniu samochodów Tesla, to można mieć nadzieję, że za jakiś czas w istocie tego typu roboty zaczną być produkowane seryjnie. Oczywiście podstawowym problemem jest tu użyteczność tego urządzenia, a ona wymaga odpowiedniego oprogramowania wykorzystującego sztuczną inteligencję. Niemniej jednak imponujący jest przewidywany koszt – 20 tys. dolarów za jednego robota przy seryjnej produkcji. Wprawdzie Elon Musk rysował optymistyczną wizję, z której wynikało, że tego typu roboty są już na horyzoncie, ale na wszelki wypadek nie sprecyzował, kiedy będą dostępne komercyjnie – mówił o 5 do 10 lat. Z tego rozrzutu wynika, iż jest to bliżej niesprecyzowana przyszłość. Wytworzenie humanoida nie jest obecnie wyzwaniem technologicznym, ale wytworzenie prawdziwego robota kompana, który będzie akceptowany przez ludzi, nadal jest. Ciekawe, jak Tesla poradzi sobie z tym wyzwaniem? Zapewne zacznie od wytworzenia humanoidalnego kobota współpracującego z ludźmi w fabryce. W każdym bądź razie ma odpowiednie środowisko do testowania takich urządzeń – własne fabryki.
Potrzeby przemysłu wymusiły na producentach robotów opracowywanie coraz to nowszych narzędzi montowanych, jako końcówki manipulatorów. Podstawowe narzędzia to: chwytaki, spawarki, zgrzewarki, pistolety natryskujące farbę, szlifierki, urządzenia do polerowania i nanoszące klej czy frezarki. Możliwości ich zastosowania wynikały bezpośrednio z wysokiej powtarzalności pozycjonowania oraz z prędkości ruchu, która czyniła robotyzację ekonomicznie uzasadnioną. Stosuje się chwytaki: dwupalczaste, kształtowe, podciśnieniowe, elastyczne [46]. Każde z tych rozwiązań ma ograniczone zastosowanie. Bogactwo narzędzi, w które mogą być wyposażone roboty, czyni je uniwersalnymi urządzeniami produkcyjnymi. Niemniej jednak różnorodność chwytaków związana jest z dążeniem do uczynienia robotów uniwersalnymi urządzeniami zdolnymi świadczyć wszelkie usługi, więc działającymi w środowisku stworzonym dla ludzi i operujących przedmiotami przeznaczonymi do używania przez człowieka.
Najlepiej byłoby odwzorować ludzką dłoń, ale to jest trudne do osiągnięcia z punktu widzenia konstrukcji mechanicznej. Liczba stopni swobody ludzkiej dłoni jest zbyt duża (pięciopal-
8 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
czasta dłoń ma 23 stopnie swobody [55]), by móc zastosować odpowiednią liczbę silników – chwytak byłby zbyt duży i ciężki [52]. Chwytaki z silnikami wbudowanymi w złącza palców albo są ciężkie albo mają małą siłę chwytu. Co więcej niebagatelnym problemem jest doprowadzenie do silników przewodów zarówno zasilających jak i sterująco-pomiarowych. Usunięcie silników z obszaru dłoni czyni konstrukcję lżejszą, ale przeniesienie napędu (linkowe, cięgnowe, przekładniowe) obniża udźwig takiego urządzenia i nie jest niezawodne. Ponadto silniki muszą być przeniesione w inne miejsce i skupione w niewielkiej przestrzeni. Wszystkie te rozwiązania zwiększają tarcie w układzie mechanicznym, komplikując sterowanie ruchem palców. Istotnym problemem jest zabezpieczenie chwytaka wielopalczastego przed uszkodzeniem w przypadku sterowania pozycyjnego, gdy niektóre palce w trakcie chwytania zetknęły się przedwcześnie z obiektem. Można albo stosować czujniki dotyku lub sił albo elementy podatne lub odpowiednie sprzęgła [54]. Najlepiej zastosować kombinację tych metod jednocześnie i sterowanie pozycyjno-siłowe. Dłonie mające elastyczne człony bądź stawy upraszczają chwytanie, gdyż palce samoistnie dostosowują się do kształtu chwytanego przedmiotu, ale zazwyczaj zmniejsza to precyzję i siłę chwytu.
Chwytaki wielopalczaste można podzielić na: antropomorficzne i nieantropomorficzne. Antropomorficzne, jak nazwa wskazuje, imitują dłoń ludzką, natomiast te drugie nie. Zaletą chwytaków antropomorficznych jest to, że dzięki imitacji ruchu dłoni ludzkiej łatwiej jest nam zrozumieć sposoby manipulacji obiektami, a zatem prościej opracować metody sterowania nimi. Ma to szczególne znaczenie przy teleoperacji. Celem wszakże jest uzyskanie zręczności manualnej podobnej bądź przewyższającej ludzką, niezależnie od struktury chwytaka. Należy jednak zwrócić uwagę, że owa zręczność nie wynika jedynie ze struktury kinematycznej, ale również z liczby, rodzaju i rozdzielczości czujników zamontowanych w chwytaku. Ponadto niebagatelną rolę odgrywają algorytmy sterowania korzystające z informacji sensorycznej, by odpowiednio poruszać członami chwytaka. Chwytak musi wywierać takie siły na trzymany obiekt, by on się nie wyślizgnął oraz by nie został zgnieciony. Co więcej, rodzaj chwytu musi być dostosowany do wykonywanego zadania. Oznacza to, że sterowanie chwytakiem wymaga istotnej współpracy z nadrzędnym układem sterowania planującym wykonanie zadania. Dodatkowo ludzka dłoń może rozpoznawać przedmioty dzięki wyczuciu kształtu, faktury, temperatury, wagi, twardości etc. Zazwyczaj nie mamy problemu ze zlokalizowaniem konkretnego przedmiotu w plecaku w ciemności. Pożądane jest by tę zdolność aktywnego czucia zreprodukować w robotach. Pomimo prowadzenia od wielu lat (np. [37, 66]) prac badawczych nad chwytakami dla robotów nie udało się zbliżyć do możliwości dłoni ludzkiej. Ani parametry siłowo-ruchowe ani zdolności percepcyjne nie są zbliżone do ludzkich, nie wspominając o zręczności chwytania i manipulacji przedmiotami różnych kształtów. Większość chwytaków, nawet tych wielopalczastych, przystosowana jest do chwytania przedmiotów o ograniczonych, w porównaniu z możliwościami ludzkiej dłoni, kształtach, masie i wymiarach.
Przyzwyczailiśmy się, że roboty budowane są ze sztywnych elementów, ale istnieją również konstrukcje wykorzystujące elementy podatne bądź w całości stworzone z miękkiego tworzywa. Główną motywacją do tworzenia takich urządzeń jest bezpieczeństwo interakcji z nimi [65]. Zderzenie z miękkim robotem jest o wiele mniej groźne niż takie zdarzenie z udziałem twardego odpowiednika. Ponadto podatność ułatwia wiele aspektów manipulacji. Ponieważ roboty w całości lub części składające się z miękkich elementów stają się coraz bardziej popularne, uzyskały swoją nazwę własną: roboty miękkie (ang. soft robots). Należy jednak podkreślić, że studia nad miękkimi robotami zaczęły się jeszcze na przełomie lat 70. i 80. XX wieku [74], na długo zanim to określenie stało się popularne. Często inspira-
cja biologiczna [18] jest czynnikiem determinującym budowę robota (np. trąba słonia [16, 50], macki ośmiornicy [51], giętkie rośliny). Wszakże najpoważniejszymi problemami są sterowanie ruchem takich urządzeń oraz sposób ich wytwarzania (np. toczenie, frezowanie, spawanie czy gwintowanie nie wchodzą w rachubę). Raczej stosuje się druk 3D, naprzemienne nanoszenie materiału i obróbkę mechaniczną lub laserową, czy łączy włókna (np. węglowe) z elastycznym polimerem. Do wywoływania ruchu stosowane są elastomery dielektryczne, polimery ferroelektryczne, polimery ciekłokrystaliczne, polimery cechujące się pamięcią kształtu, polimery z wbudowanymi stopami zachowującymi pamięć kształtu, wszelkie konstrukcje pneumatyczne wykorzystujące różnicę ciśnień oraz wiele innych. Do tworzenia ciała często korzysta się z gum silikonowych. Zaletą robotów tego typu jest to, że mogą się wyginać w sposób ciągły, w odróżnieniu od ich sztywnych odpowiedników, które mają dyskretną liczbę stopni swobody. Ponadto robotom wykonanym z materiałów elastycznych łatwiej jest wniknąć do ciasnych i wąskich przestrzeni – są bardziej wszędobylskie. Miękkie materiały umożliwiają inkorporację zarówno czujników jak i siłowników, ale nie tych stosowanych w robotach sztywnych. Trudnością jest dostarczenie energii czujnikom stosowanym w robotach miękkich oraz przekazywanie informacji sterujących i zwrotnych. Miękkie roboty mogą się zginać, rozciągać, skręcać, być ściskane, pęcznieć, marszczyć się, no i dzięki temu, iż są to zmiany ciągłe, dysponują nieskończoną liczbą stopni swobody. Modele matematyczne robotów sztywnych są dość dobrze znane, natomiast tych miękkich są trudniejsze do opracowania, a co za tym idzie urządzenia te sprawiają większe problemy w sterowaniu. Częściej stosuje się sterowanie impedancyjne (podatnością mechaniczną materiału) niż sterowanie pozycyjne wykorzystywane w robotach sztywnych. Szczególną trudnością jest uzyskanie odpowiedniej precyzji ruchu, ale do pewnego stopnia jest to kompensowane podatnością, dzięki której manipulator jest w stanie dostosować się do chwytanego obiektu. Prace badawcze idą w kierunku zastosowania elektroniki rozciągliwej (stretchable electronics), która może być zespolona z ciałem robota miękkiego.
Szczególnie interesujące są chwytaki wykonane z miękkich komponentów. Zazwyczaj są to chwytaki nieantropomorficzne. W przypadku miękkich chwytaków głównym problemem jest uzyskanie jednocześnie: dużego zakresu ruchu, dużej siły uścisku oraz zdolności do szybkiej reakcji na sygnały sterujące. Do budowy chwytaków stosuje się materiały, których sztywność zależy od temperatury, materiały elektro- i magnetoreologiczne oraz granulaty, które twardnieją wskutek wyssania powietrza spomiędzy ziarenek oraz miękną przy wtłaczaniu powietrza między nie. Wyróżnia się trzy kategorie sposobów chwytania [67]:
a) generowanie ruchu (np. zaginanie palców bądź macek wokół obiektu wskutek deformacji wywołanej zmianą ciśnienia lub skracania cięgien),
b) zmiana sztywności (np. otaczanie obiektu miękkim chwytakiem, a następnie utwardzanie materiału, z którego jest skonstruowany) lub
c) zmiana przyczepności (np. przyssawki, elektromagnesy lub elektroadhezja).
Zastosowana metoda zależy od cech obiektu chwytanego: ciężar, gładkość powierzchni, jej czystość i kształt, podatność, kruchość, rodzaj materiału etc. Ta duża różnorodność technologii wskazuje, że chwytaki muszą być dobierane do rodzaju obiektów chwytanych. Niektóre ze wspomnianych metod są bardziej uniwersalne inne mniej. W miękkich chwytakach można inkorporować różnorodne czujniki, ale nie mogą one być tożsame z tymi stosowanymi w chwytakach zbudowanych z elementów sztywnych. Czujniki te muszą być elastyczne, a w szczególności rozciągliwe, ale można też stosować czujniki nieelastyczne, ale wtedy muszą być bardzo małe (np. MEMS). Nie ulega wątpliwości, że roboty kooperujące z ludźmi muszą być miękkie. Również
9
nie ulega wątpliwości, że chwytanie także wymaga podatności i bogatego oczujnikowania. Stąd intensywne badania w tej dziedzinie, ale systemy o możliwościach manipulacyjnych człowieka nadal są dość odległe.
Ludzie komunikując się ze sobą wykorzystują przede wszystkim mowę, ale istotna jest również mimika twarzy oraz gestykulacja [40]. Dla naturalnej interakcji, robot również musi przekazywać informację o swym stanie emocjonalnym przez odpowiedni wyraz twarzy. Chodzi tu o zestrojenie stanu emocjonalnego robota i człowieka. Prace w tym zakresie idą w dwóch kierunkach. Jednym jest jak najdokładniejsze odtworzenie wyglądu głowy ludzkiej, a drugim jest stworzenie sympatycznej artystycznej reprezentacji głowy, rodzaju kukiełki. Przykładem pierwszego podejścia są roboty Replee i Geminoid stworzone przez Hiroshi Ishiguro [33, 36], natomiast drugiego robot Flash stworzony na Politechnice Wrocławskiej [42]. W tym drugim przypadku istotnym jest, by twarz kukiełki była wystarczająco ekspresywna, aby przekazać bogactwo emocji, a co więcej, by te emocje były czytelne dla interlokutora – stąd jest to problem rodem ze sztuki tworzenia postaci animowanych, a więc mamy tu do czynienia ze stykiem nauk technicznych ze sztuką. Otwartym problemem badawczym z pogranicza robotyki i psychologii jest zdecydowanie, czy ludzie preferować będą sztucznych kompanów ściśle odwzorowujących ludzi czy wytwory artystyczne luźno przypominające człowieka, bądź wcale niepodobne do niego. Masahiro Mori wykrył dolinę niesamowitości lub osobliwości (ang. uncanny valley) [57]. Owa dolina występuje w wykresie odwzorowującym emocjonalną reakcję obserwatora na podobieństwo oglądanego obiektu do człowieka. Dolina jest związana z odpychającym wrażeniem, gdy podobieństwo obserwowanego obiektu do człowieka nie jest idealne, zarówno co do wyglądu, jak i zachowania. Ludzie wtedy stają się zaniepokojeni i wykazują odrazę. Wynika z tego, że początkowo, im większe podobieństwo robota do człowieka tym większa jego akceptacja, po czym następuje załamanie, które następnie przeradza się w nagłe zwiększenie akceptacji, gdy podobieństwo staje się idealne. Sugeruje to, że słabe repliki człowieka nie będą akceptowane przez ludzi. Natomiast David Hanson pokazał ranking akceptowalności obrazu dziewczyny, z którego wynika, że seria artystycznie odkształconych obrazów jej twarzy, poczynając od bardziej przypominających te z kreskówek, a kończąc na oryginalnym zdjęciu, wykazuje nieznacznie większą akceptowalność obrazów z kreskówek niż oryginału [35]. Sugeruje to brak wyraźnej doliny. Niemniej jednak te badania dotyczyły obrazu, a nie trójwymiarowego obiektu, z którym człowiek wchodzi w bezpośrednią interakcję. Generalnie obecnie uznaje się, że ludziom łatwiej wchodzi się w interakcje z robotami kompanami, jeżeli mają ludzki wygląd [15]. Co więcej nie tylko o wygląd tu chodzi, ale i to, że ta kategoria robotów działa w otoczeniu stworzonym dla ludzi, więc podobieństwo strukturalne ciał jest wskazane.
Obecny stan badań na styku robotyki i sztucznej inteligencji najlepiej obrazuje robot Sophia [1], z którym można prowadzić konwersację w języku angielskim. Robot nie tylko logicznie odpowiada na zadawane pytania, ale sensownie żartuje, utrzymuje kontakt wzrokowy z interlokutorem, a mimika twarzy i gesty rąk są zgodne z emocjami wywoływanymi konwersacją. Zrobił on, a tak naprawdę ona, tak duże wrażenie, że król Arabii Saudyjskiej zdecydował się jej nadać obywatelstwo swego kraju. Roboty o takich zdolnościach są niezbędne, by stać się kompanami dla ludzi, a w szczególności ludzi starszych. Odpowiadają one na istotne zapotrzebowanie społeczne, gdyż osoby starsze, bądź niepełnosprawne, często cierpią z powodu samotności oraz niemożności wykonywania prozaicznych czynności dnia codziennego. Taki robot mógłby być ich kompanem w życiu codziennym. Niestety Sophia zachowuje się sensownie jedynie, jeżeli wcześniej jej sterownik zostanie dostosowany do zakresu tema-
tycznego rozmowy. Ułatwia to analizę rozmowy i wyodrębnienie danych, które umożliwiają doskonalenie odpowiedzi robota w przyszłości. Oprogramowanie stanowi zintegrowany system składający się z modułów opracowanych przez różne firmy, np. oprogramowanie rozpoznające mową opracowała firma Alphabet, syntezę mowy firma CereProc, a umiejętnością prowadzenia konwersacji i integracją zajęła się firma Hanson Robotics. Architektura układu sterowania robota Sophia bazuje na oprogramowaniu OpenCog [30], umożliwiającym uczenie się i wnioskowanie, oraz na głębokich sieciach neuronowych. OpenCog stanowi programową strukturę ramową do tworzenia oprogramowania sztucznej ogólnej inteligencji (Artificial General Intelligence – AGI), w przyszłości mającej umożliwić tworzenie systemów o inteligencji porównywalnej do ludzkiej, a być może ją przewyższającą. Ogólna inteligencja jest rozumiana jako ogólnie efektywne zachowanie prowadzące do osiągnięcia celu dla nietrywialnych zadań wykonywanych w złożonych środowiskach. Ogólność wynika ze zdolności do wyszukania odpowiedniego zachowania wyrażanego poprzez program sterujący realizujący to zachowanie. Innymi słowy, ogólna inteligencja nie dotyczy realizacji pojedynczego zadania w ściśle określonym środowisku, np. prowadzenia rozgrywki szachowej, a raczej zdolności do poznania i zrozumienia świata w celu rozwiązywania całkiem nowych problemów [29, 31]. Prowadzi to do konstruowania samomodyfikowalnych systemów. Oczywiście chodzi o to, bo osiągnąć ogólnie inteligentne zachowania przy ograniczonych zasobach obliczeniowych.
Zastosowana w robocie Sophia architektura systemów kognitywnych powstała na bazie teorii ogólnej sztucznej inteligencji wykorzystanej do stworzenia OpenCogPrime. Założono, że systemy kognitywne będą współdziałały z oprogramowaniem odpowiedzialnym za: percepcję, wykonywanie czynności (akcji) oraz sterowanie i koordynację działania wymienionych tu podsystemów. Wykonywanie czynności obejmuje transformację zgrubnych planów otrzymanych z systemu kognitywnego w plany szczegółowe. Ogólna inteligencja ma wynikać z różnych sposobów przetwarzania wiedzy zgromadzonej we wskazanych rodzajach pamięci oraz zdolności do samoorganizacji systemu złożonego z agentów upostaciowionych [27]. Przyjęto, że wygodnym narzędziem matematycznym do reprezentowania wiedzy są hipergrafy. Ponadto założono interakcję systemu kognitywnego zbudowanego na bazie OpenCogPrime [28] z systemem bezpośrednio sterującym efektorami i receptorami robota. System kognitywny jest zdolny do analizy kontekstu oraz rozumienia celów stawianych przed robotem. Przyjęto że system kognitywny działa powoli, natomiast sterowanie bezpośrednie efektorami zdolne jest działać reaktywnie, a więc szybko reagować na pobudzenia od czujników. OpenCogPrime definiuje architekturę systemu w kategoriach komponentów wchodzących w interakcje ze sobą. Robi to na bazie teorii kognitywnej synergii [26], która postuluje, że ogólna inteligencja musi korzystać z mechanizmów tworzenia wiedzy wykorzystywanych przez różne rodzaje pamięci: deklaratywnej (przechowującej fakty), proceduralnej (zawierającej informacje, jak wykonywać czynności), sensorycznej (zawierającej dane uzyskane z czujników), epizodycznej (zawierającej sekwencje zdarzeń lub odczytów czujników), intencjonalnej (zawierającej wiedzę na temat celów systemu) i uwagi (określającej na czym warto skupiać uwagę w różnych okolicznościach). System musi mieć mechanizmy tworzenia zawartości poszczególnych rodzajów pamięci. Mechanizmy tworzenia i przetwarzania zawartości pamięci muszą być ze sobą odpowiednio zintegrowane by spowodować wyłonienie się inteligencji. System musi wiedzieć kiedy działać na podstawie posiadanej już wiedzy, a kiedy musi wytworzyć nową. To tworzenie nowej wiedzy traktowane jest jako proces kognitywny. Wskutek tych interakcji ma się wyłonić inteligentne zachowanie całości. W przypadku Sophii system kognitywny
10 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
jest przede wszystkim odpowiedzialny za prowadzenie inteligentnej konwersacji.
W Japonii prowadzone są prace badawcze mające odpowiedzieć na pytanie, co to znaczy być człowiekiem? Odpowiedzi na to pytanie poszukuje się nie tylko na gruncie nauk humanistycznych, ale również za pośrednictwem robotyki. Próba stworzenia maszyny imitującej człowieka powinna dać, przynajmniej częściowo, głębszą wiedzę o naturze człowieka i jego zachowaniach. Tym zagadnieniem zajmuje się Hiroshi Ishiguro, który stworzył całą rodzinę robotów łudząco przypominających ludzi (androidy) [34]. W szczególności zrobił replikę samego siebie (Geminoid HI-2). Jego roboty mają powłoki wykonane z pianki uretanowej oraz gumy silikonowej. Ze szczególną pieczołowitością oddano mimikę twarzy, więc rozmowa z tymi robotami sprawia wrażenie obcowania z żywym człowiekiem. Metalowy szkielet oraz miękka powłoka poruszane są siłownikami pneumatycznymi. Androidy te wyposażono w mikrofony, syntezatory mowy oraz kamery, dzięki czemu słyszą i widzą rozmówców. Profesor Ishiguro twierdzi, że stworzenie robotów wiernie imitujących ludzi ułatwi nam wchodzenie w interakcje społeczne z tymi maszynami. Oczywiście nie tylko wygląd musi być podobny, ale także zachowanie robota. Nasze mózgi są dostosowane do interakcji z innymi ludźmi, więc łatwiej nam wchodzić w relacje z człowiekiem niż z maszyną. Stąd chęć upodobnienia robotów do ludzi, szczególnie gdy wykonują zadania wymagające bezpośredniego obcowania z człowiekiem. Badanie, na ile istotny jest wygląd interlokutora w konwersacji z nim, ma ważne znaczenie nie tylko dla psychologii, ale również dla robotyki, szczególnie jeżeli chcemy, żeby roboty stanowiły atrakcyjnych kompanów dla osób samotnych. W komunikacji międzyludzkiej wyraz twarzy oraz gestykulacja, zaraz po tym, co mówimy, odgrywa bardzo istotną rolę. Tego samego będziemy wymagać od robotów kompanów. Braki w zdolnościach konwersacyjnych, wynikające z niedoskonałości programów sztucznej inteligencji, spowodowały przejście na teleoperację Geminoida, w celu określenia, na ile byłby on akceptowany przez ludzi, gdyby był inteligentniejszy. Początkowo androidy traktowano z rezerwą, ale po okresie przyzwyczajania, były akceptowane. Teleoperacja wymagała synchronizacji mimiki twarzy operatora i ruchów jego głowy z tymi Geminoida, do czego wykorzystywano kamerę rejestrującą obraz szyi i głowy człowieka. Po pewnym czasie operatorzy sygnalizowali, że mają odczucia, jakby znajdowali się w pomieszczeniu, w którym był Geminoid, do tego stopnia, że odczuwali dotyk, pomimo że robot nie był wyposażony w czujniki sił. Zapewne odgrywały tu rolę neurony lustrzane, które powodują czucie nie tylko, gdy jesteśmy dotykani, ale również wtedy, gdy jedynie widzimy, że tak jest.
Niemniej jednak celem było, i nadal jest, stworzenie autonomicznych robotów wchodzących w pozytywne interakcje z ludźmi. Ludzie mają różne upodobania, więc masowa produkcja identycznych robotów kompanów nie zadowoli wszystkich klientów. Wymagana będzie personalizacja robotów, co doprowadzi do ich indywidualizacji. To z kolei prowadzi do inżynierii cech osobowościowych robotów [47]. W wyniku tych badań powstał generatywny model osobowości kształtowany przez cele, dzięki któremu można uzyskać różne cechy osobowościowe robota. Innymi słowy, roboty o różnych osobowościach będą osiągały postawione cele na różne sposoby. Generatywny model osobowości umożliwia wytworzenie przy tym samym kontekście różnych zachowań robotów. Model ten stanowi archetyp, który jest różnicowany przez parametryzację. Przyjęto, iż robot działa według schematu Sense-Plan-Act, a indywidualizacja dotyczy jedynie planowania. Przy czym planowanie nie tylko określa zachowanie robota, ale również zmienia jego nastrój, więc w podobnej sytuacji robot może się zachować inaczej, ze względu na swoje aktualne usposobienie. Robota obdarzono trzema stopniowalnymi cechami osobowości: ekstrawertycz-
ność/introwertyczność, ugodowość, skrupulatność (ang. extraversion, agreeableness, conscientiousness).
Nurt badań, w którym roboty i ludzie wchodzą w bezpośrednie interakcje, doprowadził do eksperymentów z wykorzystaniem robotów, ale nakierowanych na zrozumienie zachowań ludzkich. Przykładowo badano zdolność do synchronizacji rytmicznej z robotami humanoidalnymi [53]. Okazało się, że łatwiej jest człowiekowi zsynchronoizować swą grę na bębnie, z rytmem tworzonym przez eksperymentatora na drugim bębnie, jeżeli człowiek ten mógł obserwować grupę tańczących do tej muzyki robotów, niż wtedy, gdy widział i słyszał jedynie grę eksperymentatora. Ponadto poziom satysfakcji z uczestnictwa w eksperymencie wzrastał proporcjonalnie do liczby obserwowanych tańczących robotów. Eksperymenty tego typu wskazują, że możemy się dowiedzieć więcej nowego o zachowaniach człowieka, gdy wchodzi on w interakcje z robotami. Rodzi się nowa gałąź behawioryzmu, w której badane są interakcje człowiek–robot. Prócz dążenia do stworzenia androida wiernie replikującego człowieka istnieje trend odwrotny, w którym celowo tworzy się głowy robotów ewidentnie mało przypominające ludzkie, niemniej jednak zdolne do wyrażania emocji. Przykładami robotów z takimi głowami są Kismet [14] i wspominany już wcześniej Flash z głową EMYS [41, 43]. Ten pierwszy, stworzony na MIT, za pomocą kamer i mikrofonów rozpoznawał stany emocjonalne interlokutora i dostosowywał się do nich, wyrażając swoje “uczucia” ruchem ust, brwi i odstających uszu, trochę jak to robią bohaterowie kreskówek. Emocje interlokutora rozpoznawane były dzięki obserwacji wyrazu twarzy oraz percepcji natężenia i tonu głosu. Artykulacja syntezatora mowy oraz wyraz twarzy Kismeta dostosowywały się do rozpoznanego stanu emocjonalnego rozmówcy. Natomiast głowa robota Flash składała się z trzech dysków oraz dwóch kul. Dyski były odseparowane od siebie, więc górny i dolny mogły odsuwać się od środkowego, a ruchome kule z kamerami przypominały oczy. Ten zabawny i estetycznie atrakcyjny wygląd przyciągał uwagę. Co więcej te minimalistyczne środki wyrazu okazały się wystarczające do wyrażania różnorakich emocji w trakcie rozmowy z ludźmi.
Kategoria robotów terenowych obejmuje sobą bardzo szeroką grupę robotów. Roboty te mogą poruszać się po lądzie, na i pod wodą, ale i w powietrzu. Wyróżnikiem jest działanie w środowisku naturalnym, a więc w lasach, na polach, pod i na wodzie, w powietrzu. W tym ostatnim przypadku trudność stanowi nawigacja względem obiektów odniesienia znajdujących się na ziemi, no i oczywiście warunki pogodowe. Najbardziej rozwinięte są badania dronów wojskowych oraz samochodów autonomicznych.
Badania nad autonomicznymi pojazdami dotyczą samochodów poruszających się zarówno po bezdrożach, jak i tych przemieszczających się po drogach publicznych, w tym i w ruchu miejskim. Intensywniejsze badania nad samochodami autonomicznymi rozpoczęto w latach 70. XX w. Prowadzono je w Japonii, Stanach Zjednoczonych i Niemczech. W 1986 r. zespół Ernsta Dickmannsa pokazał, jak pięciotonowa półciężarówka mercedes jeździ po pustych drogach [23]. W 1987 r. osiągnęła prędkość 96 km/h. W połowie lat 90. XX w. samochody wykorzystywane przez tę grupę osiągały już prędkości do 175 km/h, uczestnicząc w normalnym ruchu odbywającym się na autostradzie. Te osiągnięcia były możliwe głównie dzięki intensywnym badaniom nad percepcją, a w szczególności nad interpretacją sceny [22]. Analiza obrazów uzyskiwanych z otoczenia pojazdu w ruchu i przy innych pojazdach zasłaniających nieruchome tło jest istotnym wyzwaniem, szczególnie że musi się to odbywać w czasie rzeczywistym. Dlatego obecnie pojazdy autonomiczne wykorzystują tachometry do pomiaru prędkości i do odometrii, czujniki ultradźwiekowe do par-
11
kowania, a ponadto wyposażane są w dodatkowe czujniki wspomagające kamery, takie jak lidary, jednostki inercyjne czy GPS.
Na początku XXI wieku Amerykańska Agencja Zaawansowanych Projektów Badawczych w Obszarze Obronności DARPA (ang. Defense Advanced Research Projects Agency) zwróciła uwagę, że mimo inwestowania dużych środków finansowych w badania nad pojazdami autonomicznymi, ich postęp jest mizerny. Postanowiono więc zorganizować wyścig. Nazwano go DARPA Grand Challenge I. Odbył się w 2004 r. Zadaniem samochodów było samodzielne przejechanie trasy prowadzącej przez pustynne góry, a liczącej 227 km. Główną nagrodą był milion dolarów dla zespołu, którego pojazd dotrze do mety najszybciej. Okazało się to wyzwaniem ponad siły wszystkich uczestników. Najlepszy samochód pokonał niespełna 12 km. Pojazdy miały problemy z wykrywaniem przeszkód przez lidary i kamery w pustynnych warunkach oraz nawigowaniem na podstawie GPS. Słabe wyniki pierwszego wyścigu zdopingowały DARPA do ufundowania najlepszym zespołom grantów na rozwój ich pojazdów, podwojenia nagrody i zorganizowania w 2005 r. DARPA Grand Challenge II. Wynik był imponujący. Trasę 212 km pokonało 5 pojazdów, a Stanley (VW Tuareg) zrobił to w poniżej 7 godzin [69]. Problem autonomicznej nawigacji po gruntowych drogach i bezdrożach uznano za rozwiązany. Uwagę skoncentrowano na ruchu miejskim. W 2007 r. zorganizowano DARPA Urban Challenge. Zadaniem było poruszanie się autonomicznych pojazdów po drogach opuszczonego osiedla znajdującego się przy zlikwidowanej bazie lotniczej. Tor próbny miał około 100 km. Poruszały się po nim i w jego poprzek inne pojazdy – część autonomicznych, a część kierowana przez ludzi. Tym razem trzeba było przestrzegać reguł kodeksu drogowego. Na trasie przejazdu pojawiały się blokady wymagające zawracania, trzeba było omijać przeszkody, parkować, a ponadto prawidłowo się poruszać w deszczu lub we mgle. Z początkowych 35 pojazdów do finału dotarło 11. Trzy misje, które składały się na finał, ukończyło tylko sześć pojazdów. Pozostałe albo zawiesiły swoje działanie [61] albo uległy kolizjom [24]. Analiza jednej z kolizji wykazała, że w przypadku ludzkich kierowców ich kontakt wzrokowy odgrywa dominującą rolę przy powolnym ruchu samochodów. Natomiast w przypadku pojazdów autonomicznych problemem jest wyczucie intencji pozostałych uczestników ruchu, wykrywanie fantomowych przeszkód i nadmierna koncentracja na wykrywaniu i pozostaniu na pasie ruchu.
W większości przypadków pojazdy biorące udział w zawodach dokonywały syntezy danych z wielu czujników, by wytworzyć sobie trójwymiarowy model otoczenia w postaci probabilistycznej mapy zajętości, na podstawie której wnioskowały, jak się zachować. Ponadto brały pod uwagę zadaną globalną trasę przejazdu. Zawody wygrał zespół Tartan Racing z Carnegie Mellon University [71]. Pojazdy były wyposażone w kamery, lidary, radary i GPS. Należy zwrócić uwagę, iż początkowo do badań wykorzystywano wielkie samochody, by były w stanie pomieścić sprzęt sterujący. Z czasem sprzęt miniaturyzowano, więc wykorzystywane samochody stawały się coraz mniejsze. W 2018 r. firma BMW pokazała autonomiczny motocykl, który porusza się bez kierowcy po torze próbnym [11]. Badania te prowadzone są w celu poprawy bezpieczeństwa prowadzenia motocykli oraz lepszego zrozumienia dynamiki ich ruchu. Rozwój technologii osiągnięty dzięki konkursom DARPA umożliwił stworzenie komercyjnej taksówki bez kierowcy –Waymo taxi [2]. Firma Waymo została założona w 2016 r. przez koncern Alphabet, właściciela Google. Sam Google zaczął prowadzić prace nad autonomicznymi pojazdami już w 2009 r. Skorzystano z wiedzy Sebastiana Thruna, który był szefem zwycięskiego zespołu z Grand Challenge II, oraz Anthonego Levandowskiego, szefa firmy 510 Systems, której sprzęt i oprogramowanie zostały wykorzystane do stworzenia Street View Googla. Waymo nie tylko opracowało oprogramo-
wanie niezbędne do nawigacji w ruchu ulicznym, ale również odpowiednio tanie czujniki wykorzystywane w ich autonomicznych pojazdach. Powstały nowe lepsze i tańsze kamery i lidary. Ponadto wykorzystywane są radary, GPS oraz mikrofony. Te ostatnie do wykrywania sygnałów pojazdów uprzywilejowanych. Samochód dysponuje szczegółową mapą 3D terenu, po którym się porusza. Układy percepcyjne szczegółowo obrazują teren wokół samochodu. Porównanie danych uzyskanych z układu percepcji z mapą oraz z danymi uzyskanymi z GPS, jeżeli są dostępne, umożliwia precyzyjną lokalizację pojazdu. Dane z systemu percepcji służą również do określania sytuacji drogowej, a więc rejestrują informacje o ruchu pieszych, rowerzystów i pojazdów oraz znaki drogowe, zarówno pionowe, jak i poziome. Dane te służą do predykcji zachowania się innych pojazdów. W tym celu wykorzystywane są wcześniej wyuczone wzorce zachowań uczestników ruchu.
Zarówno systemy percepcji, jak i predykcji, wykorzystują głębokie sieci neuronowe do realizacji swych zadań. W tym celu skorzystano z doświadczeń zespołu Google Brain w stosowaniu biblioteki TensorFlow [5], przeznaczonej do implementacji głębokich sieci neuronowych i algorytmów uczenia maszynowego. Biblioteka ta, między innymi, umożliwia wykorzystanie procesora opracowanego przez Google na potrzeby sieci neuronowych – Tensor Processing Unit (tutaj tensor należy rozumieć jako wielowymiarową macierz). Wspomniane sieci neuronowe umożliwiają samochodowi podjęcie decyzji o własnym zachowaniu – konkretnie określenie parametrów ruchu. Dane zebrane w trakcie jazdy samochodu, o zachowaniu własnym i innych uczestników ruchu, są używane do uczenia systemu, a wiec polepszania zdolności autonomicznego kierowcy. Niemniej jednak większość pracy związanej z uczeniem sieci jest wykonywana z użyciem symulatora Carcraft odzwierciedlającego rzeczywiste środowisko, w którym poruszają się samochody w USA. 25 tysięcy symulowanych samochodów autonomicznych przejechało już miliardy kilometrów, by ich sieci neuronowe nauczyły się nimi bezpiecznie sterować [49].
Obecnie robot-taksówka klasyfikowany jest jako pojazd poziomu 4 SAE. Jego obsługa ogranicza się do czterech funkcji: rozpocznij jazdę, zjedź z drogi i się zatrzymaj, zamknij pojazd oraz pomoc. Od końca 2018 r; w Phoenix istnieje usługa Waymo One umożliwiająca skorzystanie z taksówki bez kierowcy [75]. W 2021 r. podobna usługę zaczęto testować w San Francisco, a obecnie testowana jest i w innych miastach USA. Samochody Waymo eksploatowane są w przyjaznych warunkach atmosferycznych, ale prowadzone są prace nad rozszerzeniem ich możliwości. Zdarzało im się uczestniczyć w drobnych kolizjach, ale prócz jednego przypadku wszystkie wypadki były zawinione przez ludzkich kierowców. Na marginesie, należy zauważyć, że pojawienie się taksówek bez kierowców w dobie pandemii, gdzie kontakty międzyludzkie muszą być ograniczone, wydaje się nie ekstrawagancją technologiczną, ale koniecznością. Oprócz Waymo nad autonomicznymi pojazdami pracują miedzy innymi: Tesla, GM, Ford, VW, Toyota, Volvo, BMW i Mercedes-Benz.
DARPA, zachęcona dobrymi wynikami uzyskanymi dzięki konkursom, zdecydowała się na zwiększenie ich liczby i rozszerzenie tematyki. Między innymi zorganizowano Robotics Challenge, rozegrany w latach 2012–2015. W tym przypadku chodziło nie tylko o kierowanie pojazdem, ale także o wykonywanie czynności w środowisku naturalnym, bądź stworzonym przez człowieka. Dalekosiężnym celem jest stworzenie robota, który mógłby brać udział w akcjach ratowniczych w przypadku katastrof. Reguły konkursu były następujące:
− Robot miał 60 minut na wykonanie wszystkich ośmiu zadań,
− Zdalny operator mógł postrzegać środowisko jedynie przez czujniki robota, a komunikacja z nim celowo nie była niezawodna, więc autonomia działania była preferowana,
12 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
− W przypadku upadku robot musiał radzić sobie samodzielnie, − Interwencja ludzka kosztowała 10 min kary.
Natomiast wspomnianych osiem zadań to:
1) Prowadzenie samochodu przystosowanego do prowadzenia przez człowieka, ale nieposiadającego drzwi,
2) Wychodzenie z samochodu,
3) Otwieranie drzwi,
4) Otwieranie dużego zaworu,
5) Wiercenie otworu za pomocą wiertarki, którą zazwyczaj posługują się ludzie,
6) Przełączenie wyłącznika,
7) Przejście po rumowisku,
8) Wejście na schody (w pierwotnej wersji było to wspięcie się po drabinie, ale okazało się to zbytnim wyzwaniem dla robotów).
Zestaw zadań w zasadzie wymuszał, by w zawodach wzięły udział roboty humanoidalne lub dysponujące możliwościami ciała ludzkiego. Każde z zadań było wykonywane na innym stanowisku, więc roboty musiały się przemieszczać między nimi.
W zawodach brały udział 23 zespoły. Trzy drużyny wykonały wszystkie osiem zadań. Wygrał zespół z Korea Advanced Institute of Science and Technology (KAIST). Ich robot DRC-HUBO+ [44, 45] ukończył wykonanie wszystkich zadań w 44 minuty. 19 robotów wykonało co najmniej jedno zadanie. Szybkość wykonania wszystkich zadań wynikała m.in. z prędkości przemieszczania się między kolejnymi stanowiskami. Dużą prędkość zapewniły zwycięzcy napędzane koła zamontowana w kolanach i pasywne umieszczone na końcach palców stóp, co w pozycji klęcznej zamieniało robota w pojazd kołowy. Co więcej, ta pozycja jest bardziej stabilna niż stanie na stopach, co zapobiegało upadkom przy wykonywaniu zadań takich jak otwieranie drzwi. Wiele innych robotów korzystających jedynie z nóg wywracało się, a ponadto chód był o wiele wolniejszym sposobem przemieszczania się. Tu widać przewagę robotów o strukturze hybrydowej, dostosowanej do wymagań wykonywanych zadań.
Humanoidalny robot DRC-HUBO+ ma łącznie 32 stopnie swobody (w nogach po siedem, w rękach po osiem, w torsie i w szyi po jednym). Zarówno manipulatory, jak i nogi zaopatrzone są w czujniki sił i momentów sił, a ponadto robot wykorzystuje jednostkę inercyjną i żyroskop optyczny. Do goleni przymocowano czujniki przepływu optycznego rejestrujące ruch względny. Postrzeganie otoczenia zapewniały dwie kamery i lidar. Na podstawie danych z nich uzyskanych tworzone były chmury punktów, z których powstawał model 3D bezpośredniego otoczenia robota. Robot był zdalnie sterowany przez operatora. Ramiona wykorzystywały sterowanie pozycyjno-siłowe, natomiast do generacji chodu wykorzystano model robota w postaci odwróconego wahadła, a do sterowania wykorzystano prawo punktu zerowego momentu ZMP (ang. Zero Moment Point) [73, 76].
Wprawdzie roboty biorące udział w Robotics Challenge poruszały się na nogach cokolwiek niezdarnie, ale obecnie istnieją już maszyny kroczące wykazujące wysoką sprawność w tym względzie. Wytwarza je firma Boston Dynamics [4], która wyewoluowała z MIT Leg Lab. Boston Dynamics było finansowane głównie przez projekty realizowane na zamówienie DARPA. Rozpoczęło od czteronożnego robota Big Dog [64], o napędzie spalinowo hydraulicznym, który był w stanie poruszać się w bardzo zróżnicowanym terenie, a przeznaczeniem jego było wspomaganie żołnierzy w transporcie ciężkich ładunków.
MIT Leg Lab kontynuuje badania nad maszynami kroczącymi. Jednym z ich osiągnięć jest czteronożny robot Cheetah, który jest w stanie biec z prędkością 6,4 m/s (23 km/h) i przeskakiwać nad przeszkodami o wysokości do 40 cm, co stanowi 80 % długości nogi maszyny [12, 60]. Aktualnie prowadzone są prace badawcze umożliwiające takim maszynom na auto-
nomiczne poruszanie się w zróżnicowanym terenie, co wymaga umiejętności planowania swego zachowania.
Natomiast najbardziej znanymi produktami Boston Dynamics są roboty Spot (maszyna czteronożna) oraz Atlas (humanoid). Wczesna wersja tego ostatniego była wykorzystywana przez wiele zespołów biorących udział w zawodach DARPA Robotics Challenge. Obecnie Atlas jest robotem elektryczno-hydraulicznym, ma 28 stopni swobody, może biec z prędkością 2,5 m/s, ma masę 89 kg i mierzy 1,5 m. Może poruszać się na nogach, lub dzięki rękom – za pomocą brachiacji, przeskakiwać przez przeszkody, a nawet wykonywać salta. Dzięki tym zdolnościom ruchowym może pokonywać parkur. Mimo to w 2022 r. rekord prędkości w kategorii bipedów należał do robota Cassie/Digit podobnego do strusia, a skonstruowanego przez Agility Robotics oraz Oregon State University, i wynosił 24,7 km/h (około 6,9 m/s) [7].
Natomiast Spot jest najnowszym czteronogim w długiej linii takich robotów opracowanych przez Boston Dynamics. Jednym z nich był WildCat, który biegał z prędkością 32 km/h wykonując takie manewry, jak zawracanie w biegu. Spot może być wyposażony w manipulator. Jest zdolny do czołgania się, potrafi podnieść się po upadku. Otwiera drzwi zamknięte na klamkę. Zarówno Atlas jak i Spot zostały skomercjalizowane i przeznaczone są do prowadzenia badań w laboratoriach, więc dostarczane są z odpowiednimi bibliotekami oprogramowania ułatwiającymi realizację różnorodnych zadań. Badania te głównie dotyczą autonomicznych zachowań i prowadzenia misji w zróżnicowanym terenie.
Kolejnym wyzwaniem dla robotów terenowych był konkurs zaplanowany przez DARPA na lata 2018–2021 – Subterranean Challenge (SubT) [20]. Tym razem celem było stworzenie robotów, które asystowałyby przy operacjach ratowniczych w kopalniach, budynkach zawalonych przez trzęsienia ziemi etc. Istotną funkcją robotów była zdolność do tworzenia wolumetrycznych map 3D terenu poszukiwań i przekazywania ich sędziom w czasie rzeczywistym. Założono, że roboty nie będą przekształcały terenu, w którym się poruszają. Konkurs miał dwie odmiany: 1) dla rzeczywistych robotów operujących pod ziemią (zawody dla systemów rzeczywistych) i 2) dla robotów symulowanych operujących w świecie wirtualnym (zawody wirtualne). W obu odmianach wyróżniono trzy rodzaje środowisk (dziedzin): naturalne jaskinie, tunele bądź sztolnie oraz podziemia budynków. We wszystkich przypadkach korytarze mogły być poziome, nachylone lub stanowić pionowe szyby. Teren mógł być błotnisty lub zawierać cieki wodne oraz być zagruzowany, a widoczność mogła być ograniczona. Trzeba było też wziąć pod uwagę ruchome przeszkody związane z osuwaniem się terenu. Ponadto zakładano, że nie wszędzie będzie istniała łączność radiowa, więc roboty musiały być przygotowane do działania autonomicznego. Zadaniem było znalezienie i zlokalizowanie wskazanych obiektów (np. ludzi, kratek wentylacyjnych, telefonów komórkowych, gaśnic, hełmów, plecaków, wiertarek na baterie) z dokładnością do 5 m. Należy zauważyć, że dodatkową trudnością był tu brak możliwości skorzystania z GPS. Drużyny nie były wpuszczane na teren, w którym operowały roboty ani w trakcie zawodów ani przed nimi, więc w pełni musiały polegać na percepcji swych robotów. Dopuszczono jednego operatora robota, który mógł się z nim kontaktować jedynie drogą radiową, niemniej jednak zakładano, że robot będzie wykonywał zadanie autonomicznie, chociażby dlatego że łączność radiowa mogła być zerwana. Najistotniejszym kryterium oceny była prawidłowa identyfikacja i lokalizacja obiektów, natomiast czas wykonania pojedynczego przejazdu trasy był ograniczony do 60 minut.
Zawody SubT w kategorii rzeczywistych systemów wygrał międzynarodowy zespół CERBERUS [70], który skorzystał z systemu wielorobotowego składającego się z czteronożnych maszyn kroczących ANYmal B wytwarzanych przez szwajcarską firmę ANYbotics, dronów czterowirnikowych DJI M100
13
oraz mobilnego robota kołowego. Komunikację z operatorem zapewniło pozostawianie na swej drodze małych stacji łączności radiowej (WiFi Breadcrumbs). Wyzwanie stanowiło zbudowanie mapy otoczenia na podstawie danych pochodzących z wielu niezależnych źródeł (czujników zamontowanych na różnych robotach). Maszyny kroczące wykorzystywały kamery (światła widzialnego i podczerwieni), jednostki inercyjne i lidary, natomiast drony: kamery podczerwieni, lidary i jednostki inercyjne. Jeden z dronów otoczony był ażurową klatką dającą mu odporność na zderzenia. Ponadto wykorzystywano jednego robota kołowego o dużym udźwigu, który zapewniał łączność. Był on połączony z ze stacją operatora systemu za pomocą światłowodu. Sukces zapewniła synteza danych uzyskiwanych z szybkiego drona oraz z pokładowych czujników maszyny kroczącej. System wykorzystywał lokalny planer do określenia zachowania robota w niewielkiej odległości od aktualnej jego pozycji oraz globalny planer do określenia sposobu ruchu w celu realizacji całego zadania. Systemowi udało się zlokalizować 23 spośród wymaganych 40 obiektów.
Równolegle do prac nad autonomicznymi pojazdami oraz zwiększaniem możliwości robotów wykonujących misje ratownicze prowadzono badania nad robotami rolniczymi, w szczególności wspomagającymi rolnictwo precyzyjne (ang. precision agriculture) [13, 32]. Motywacją do prowadzenia tych badań jest nie tylko brak rąk do prac sezonowych, ale również spostrzeżenie, iż liczba ludności Ziemi wzrasta, natomiast jej zasoby nie. Wykarmienie zwiększającej się populacji wymaga przede wszystkim zmniejszenia marnotrawstwa, a więc zmniejszenia zużycia wody, nawozów i pestycydów. Innymi słowy, chodzi o precyzyjniejsze gospodarowanie zasobami, a w tym lepsze są maszyny niż ludzie.
Rolnictwo precyzyjne, dzięki zaawansowanym technikom pomiarowym, umożliwia dostarczanie roślinom niezbędnej ilości wody i nawozów we właściwym momencie. Umożliwia też walkę ze szkodnikami we właściwy sposób i we właściwym okresie. Okazało się, że roboty w istotny sposób mogą wspomóc ten sposób uprawy roślin. Ponieważ podstawą rolnictwa precyzyjnego są pomiary, do ich wykonywania używa się satelity, drony oraz roboty mobilne. Satelity są drogie, dostarczają informacji niskiej rozdzielczości oraz mają problemy, gdy niebo jest pochmurne. Drony dostarczają informacji o wyższej rozdzielczości, ale nie na tyle dużej, by można było tylko na niej bazować. Oczywiście zarówno satelity, jak i drony, dostarczają informacji o znacznym areale. Natomiast pojazdy są w stanie uzyskać pomiary dużo precyzyjniejsze, ale na obszarze dużo mniejszym. Stąd często korzysta się z obu rodzajów robotów wspólnie. Do dokonywania pomiarów wykorzystuje się przede wszystkim kamery światła widzialnego i podczerwonego i lidary. Na podstawie tych pomiarów określa się mapy terenu wskazujące nawodnienie gleby i jej pH oraz stan roślin, tudzież ilość biomasy jak i spodziewane plony. Na podstawie odpowiedzi spektralnej roślin można ocenić w nich deficyt azotu, zawartość chlorofilu, stopień opanowania przez szkodniki czy nawodnienie roślin. Do badania stanu gleby roboty mobilne wykorzystują czujniki rezystancji i indukcji elektrycznej oraz georadary. Do lokalizacji i omijania przeszkód roboty naziemne zazwyczaj wykorzystują GPS oraz sonary. Roboty są używane nie tylko do wykonywania pomiarów, ale po ich przetworzeniu do wykonywania zabiegów agrotechnicznych oraz do zbierania plonów. Ogólnie roboty używanie są do sadzenia, przesadzania, usuwania chwastów, precyzyjnego nawożenia i nawadniania, dokonywania oprysków oraz zbierania plonów. Szczególnie wykorzystanie robotów w sadownictwie jest przedmiotem zainteresowania. Przykładowo opracowano prototyp do zbierania jabłek [39]. Roboty też są wykorzystywane do zbierania truskawek i pomidorów, ale wtedy rośliny te są uprawiane w taki sposób, by owoce zwisały, tak aby można
je było łatwo odciąć [63]. Chodzi o to, by nie chwytać miękkich owoców, które łatwo uszkodzić. Owoce muszą znajdować się nad podłożem, więc często stosuje się specjalne stelaże. Jest to raczej rozwiązanie dla szklarni niż dla upraw polowych. Wprawdzie obecne roboty zbierają owoce wolniej, ale mogą pracować bez odpoczynku całodobowo, siedem dni w tygodniu. Wykorzystywane przez nie algorytmy percepcji, nawigacji oraz planowania czynności wymagają użycia technik sztucznej inteligencji.
Firma Alphabet (właściciel Google) prowadzi projekt Mineral, który ma wytworzyć narzędzia sprzętowe i oprogramowanie, które umożliwią głębsze poznanie zasad wydajnego sposobu uprawy roślin [3, 68]. Naukowcy usiłują zgłębić zasady, którymi rządzi się wzrost roślin oraz jak rośliny wchodzą w interakcje ze swym otoczeniem. Jednym z narzędzi badań są roboty mobilne zbierające dane o roślinach. Dane zebrane za pomocą robotów w połączeniu z wiedzą dotyczącą genetyki roślin, zdjęciami satelitarnymi oraz tymi uzyskanymi z dronów, przetworzone za pomocą algorytmów sztucznej inteligencji mają umożliwić określenie optymalnych warunków nie tylko dla danego rodzaju roślin, ale również dla indywidualnych reprezentantów rosnących na konkretnym polu. W szczególności zespół Mineral bada, w jaki sposób minerały uwalniane są w glebie przez bakterie, a następnie jak wchłaniane są przez rośliny. Jest to istotne, gdyż wiele minerałów potrzebnych nam do życia nasz organizm nie jest w stanie samodzielnie syntezować – musi je pozyskać z jedzenia. Z 30 tysięcy znanych roślin jadalnych ludzie wykorzystują do jedzenia mniej niż 1 %. Projekt ma za zadanie zwiększyć różnorodność używanej żywności, a przez dywersyfikację zredukować monokultury, a w konsekwencji zmniejszyć podatność roślin na choroby.
Przedmiotem badań projektu Mineral są uprawy na całym świecie. W tym ambitnym celu roboty i sztuczna inteligencja odgrywają kluczową rolę. Wykorzystywana rodzina robotów wykorzystuje napędy elektryczne zasilane z pokładowych paneli fotowoltaicznych. Położenie robota określane jest za pomocą czujnika GPS. Różnorodne kamery wysokiej rozdzielczości stosowane są do badania cech indywidualnych roślin. To służy wskazaniu tych, które są szczególnie predystynowane do dalszego rozmnażania.
Ciekawym jest, że pierwotnie roboty miały służyć ułatwieniu uprawiania roślin – wyręczyć w tym ludzi, a projekt Mineral pokazuje, że są stosowane również do ułatwienia zgłębiania tajników biologii. W miarę zwiększania się możliwości ruchowych i percepcyjnych tych urządzeń zakres ich zastosowań będzie się niechybnie rozszerzał.
Możliwości robotów przemysłowych stale wzrastają. Przekłada się to na mnogość ich zastosowań. Widać tu duży wpływ inkorporacji nowych czujników, co zwiększa elastyczność działania tych urządzeń. Ciekawym jest trend zapożyczania technologii stosowanych w robotach usługowych. Dzięki temu powstały koboty, które w istotny sposób zmieniły sposób instalowania robotów w przemyśle. Rezygnuje się ze ścisłego wygrodzenia tych maszyn na rzecz umożliwienia im bezpośredniej interakcji z ludźmi. Należy się spodziewać, że ten trend zostanie utrzymany. Oczywiście nie należy się spodziewać, że klasyczne roboty przemysłowe znikną. Tam gdzie z sukcesem wykonują swoją pracę, nadal będą stosowane. Intrygujące jest, że w przemyśle zdobycze sztucznej inteligencji nie są wykorzystywane w istotny sposób.
Natomiast konstruktorzy robotów usługowych czerpią z osiągnięć sztucznej inteligencji pełnymi garściami. Związane jest to z koniecznością korzystania z rozbudowanych układów percepcyjnych dostarczających mnogości danych z różnorodnych czujników. Rozpoznawanie obrazów, analiza mowy oraz jej syn-
14 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
teza, a nadto planowanie wymagają wykorzystania różnych form sztucznej inteligencji. Dużą popularnością cieszą się sieci neuronowe, ale ich wadą jest trudność w wyjaśnieniu, czemu wytworzony rezultat ich działania jest właśnie taki, jaki jest. Tej wady nie mają systemy wnioskujące oparte na logice. Niestety opis świata za pomocą formuł logicznych nie jest sprawą łatwą. Dotychczas opracowane ontologie są dalekie od potrzeb. Najczęściej operuje się tu uproszczoną wizją świata, co nie gwarantuje, że skutki działania robota w rzeczywistości będą takie, jak zaplanowano. Prace nad sztuczną ogólną inteligencją są jeszcze na dość wczesnym etapie. Jak widać, mimo ogromnego postępu w dziedzinie sztucznej inteligencji wiele pozostaje do zrobienia, a niezbędne rozwiązania nie są oczywiste, tak że dalsza droga pozostaje niewytyczona.
Przyglądając się postępom, jakie robotyka poczyniła dzięki konkursom DARPA, należy zwrócić uwagę na kilka elementów. Wpierw skoncentrowano się na środowisku pustynnym, a więc bez postronnych ludzi, oraz samochodach, a więc na dojrzałej już technologii. Najistotniejszymi elementami były percepcja i podejmowanie decyzji o przyszłym zachowaniu samochodu. Następnie środowisko stało się bardziej wymagające. W ruchu miejskim uczestniczą ludzie, a ich bezpieczeństwo jest najistotniejsze. W następnym kroku uwagę przesunięto ze zdolności do przemieszczania się w różnorodnych warunkach na zdolności manipulacyjne. Wreszcie w konkursie SubT powrócono do pojazdów, ale już nie samochodów. Co więcej środowisko musiało być postrzegane w sztucznym świetle i, co istotne, mogło być zadymione. Wymagania narzucone na systemy percepcyjne były o wiele wyższe. Ponadto zadanie wymagało użycia systemów wielorobotowych, w skład których wchodziły nie tylko pojazdy kołowe, ale również maszyny kroczące i drony. Uwaga została przeniesiona na współdziałanie wielu robotów o różnych możliwościach. Podejmowanie decyzji w takich systemach wymaga jeszcze bardziej rozwiniętej sztucznej inteligencji. Poleganie na sztywno określonych regułach działania (działanie proceduralne) jest tu mało skuteczne.
Jak widać z powyższej analizy, stopniowo dąży się do zwiększenia autonomii działania robotów, a to jest nierozerwalnie związane z wykorzystaniem sztucznej inteligencji w oprogramowaniu układów sterowania tymi urządzeniami. Jest ona wykorzystywana przede wszystkim w układach percepcji, gdzie istotną rolę odgrywają sieci neuronowe, oraz do planowania, gdzie najczęściej wykorzystuje się przeszukiwanie albo przestrzeni stanów albo przestrzeni zadań. Ta integracja sztucznej inteligencji i robotyki dokonywała się krokami, ale obecnie nie da się omawiać wpływu robotów na społeczeństwo w oderwaniu od wpływu na nie sztucznej inteligencji.
Wprawdzie postęp w pracach nad autonomią robotów oraz zwiększeniem ich inteligencji jest imponujący, ale albo są one dostosowane do konkretnego typu środowiska albo są wspomagane przez ludzkiego operatora. Nie tylko cielesność ich powłoki jest tu przeszkodą, ale przede wszystkim ich zdolności intelektualne. Niektóre parametry ich ruchu są już zbliżone do ludzkich, np. prędkość poruszania się, ale wtedy inne parametry wtedy bywają daleko w tyle. Przykładowo nie istnieje humanoid, który potrafiłby pływać. Wszakże należy oczekiwać dalszego postępu, szczególnie jeżeli skorzysta się z rozwiązań stosowanych w miękkich robotach. Natomiast, znów pomimo istotnych postępów w dziedzinie sztucznej inteligencji, czeka roboty jeszcze długa droga nim osiągną poziom inteligencji zbliżony do ludzkiej. Należy zwrócić uwagę na to, że istotny postęp w badaniach nad robotami i sztuczną inteligencją jest obecnie czyniony nie tylko w instytucjach akademickich, ale w firmach i to nie tylko tych, których podstawową formą działalności jest produkcja robotów. Ponadto wiele instytucji finansujących naukę oraz koncernów międzynarodowych od wielu lat organizuje konkursy, których zadaniem jest skoncentrowanie uwagi zespołów badawczych lub kół naukowych na nierozwiązanych istotnych
problemach robotyki. Zapewne fundowanie nagród jest efektywniejsze finansowo niż fundowanie grantów na proponowane przez wnioskodawców projekty. Oczywiście walka o nagrodę zakłada, że zespoły partycypujące w konkursie są dostatecznie bogate, by sfinansować swoje projekty. Ponieważ takie założenie w wielu przypadkach nie bywa prawdziwe, stosuje się preselekcję, a zespołom, które zademonstrują doskonałość swej propozycji, funduje się grant na jej realizację. Wysoka nagroda pieniężna oczywiście jest dodatkowym bodźcem, ale liczy się też prestiż zdobyty dzięki wygranej.
1. Hanson Robotics Company Overview. www.hansonrobotics. com/wpcontent/uploads/2017/02/Hanson-Robotics-Overview.pdf, 2017.
2. Waymo safety report: On the road to fully self-driving https://storage.googleapis.com/sdc-prod/v1/safetyreport/ waymo-safety-report-2017.pdf, 2017.
3. Alphabet X Mineral. https://x.company/projects/mineral/, 2022.
4. Boston dynamics. www.bostondynamics.com/resources/ casestudies, 2022.
5. Abadi M., Barham P., Chen J., Chen Z., Davis A., Dean J., Devin M., Ghemawat S., Irving G., Isard M., Kudlur M., Levenberg J., Monga R., Moore S., Murray D.G., Steiner B., Tucker P., Vasudevan V., Warden P., Wicke M., Yu Y., Zheng X., TensorFlow: A system for Large-Scale machine learning. 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, November 2016. 265–283, USENIX Association.
6. Ackerman E., For Better or Worse, Tesla Bot Is Exactly What We Expected; Tesla fails to show anything uniquely impressive with its new humanoid robot prototype. „IEEE Spectrum Analysis”, October 1 2022.
7. Ackerman E., Robo-Ostrich Sprints to 100-meter World Record; Oregon State University’s Cassie is fastest bipedal robot ever to run the 100-meter dash. „IEEE Spectrum News”, September 28 2022.
8. Adolphe M., Clerval J., Kirchof Z., Lacombe-Delpech R., Zagrodny B., Center of mass of human’s body segments. „Mechanics and Mechanical Engineering”, Vol. 21, No. 3, 2017, 485–497.
9. Badger J.M., Hulse A., Thackston A., Advancing safe human-robot interactions with robonaut 2, 12th International Symposium on AI, Robotics and Automation in Space.
10. Baker W., Kingston Z., Moll M., Badger J., Kavraki L., Robonaut 2 and you: Specifying and executing complex operations. IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), March 8–10 2017, DOI: 10.1109/ARSO.2017.8025204.
11. Blain L., Riderless BMW R1200GS eerily makes its way around a test track. „New Atlas”, September 11 2018.
12. Bledt G., Powell M., Katz B., Carlo J., Wensing P., Kim S., Mit cheetah 3: Design and control of a robust, dynamic quadruped robot. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 1–5 2018, 2245–2252, 10.1109/IROS.2018.8593885.
13. Botta A., Cavallone P., Baglieri L., Colucci G., Tagliavini L., Quaglia G., A review of robots, perception, and tasks in precision agriculture. „Applied Mechanics”, Vol. 3, No. 3, 2022, 830–854, DOI: 10.3390/applmech3030049.
14. Breazeal C., Emotion and sociable humanoid robots. „International Journal of Human-Computer Studies”, Vol. 59, No. 1-2, 2003, 119–155, DOI: 10.1016/S1071-5819(03)00018-1.
15. Brooks R., I, Rodney Brooks, am a robot. „IEEE Spectrum”, Vol. 45, No. 6, 2008, 60–67, DOI: 10.1109/MSPEC.2008.4531466.
15
16. Cieślak R., Morecki A., Elephant trunk type elastic manipulator – a tool for bulk and liquid materials transportation. „Robotica”, Vol. 17, No. 1, 1999, 11–16, DOI: 10.1017/S0263574799001009.
17. Colling D., Dziedzitz J., Furmans K., Hopfgarten P., Markert K., Progress in autonomous picking as demonstrated by the amazon robotic challenge. Proceedings 15th International Material Handling Research Colloquium (IMHRC), July 24–26 2018.
18. Coyle S., Majidi C., Leduc P., Hsia K., Bio-inspired soft robotics: Material selection, actuation, and design. „Extreme Mechanics Letters”, Vol. 22, 2018, 51-59, DOI: 10.1016/j.eml.2018.05.003.
19. Critchlow A., Introduction to Robotics. Macmillan, New York, 1985.
20. DARPA. DARPA subterranean challenge: Competition rules – final event. Defense Advanced Research Projects Agency Tactical Technology Office, May 25 2021.
21. Das B., Wang Y., Isometric pull-push strengths in workspace: 1. strength profiles. „International Journal of Occupational Safety and Ergonomics”, Vol. 10, No. 1, 2004, 43–58, DOI: 10.1080/10803548.2004.11076594.
22. Dickmanns E., Dynamic Vision for Perception and Control of Motion. Springer, London, 2007.
23. Dickmanns E., Zapp A., Autonomous high speed road vehicle guidance by computer vision. „IFAC Proceedings Volumes”, Vol. 20, No. 5, 1987, 221–226, DOI: 10.1016/S1474-6670(17)55320-3.
24. Fletcher L., Teller S., Olson E., Moore D., Kuwata Y., How J., Leonard J., Miller I., Campbell M., Huttenlocher D., Nathan A., Kline F.R., The MIT-Cornell collision and why it happened. „Journal of Field Robotics”, Vol. 25, No. 10, 2008, 775–807, DOI: 10.1002/rob.20266.
25. Gillespie R., Colgate J., Peshkin M., A general framework for cobot control. „IEEE Transactions on Robotics and Automation”, Vol. 17, No. 4, 2001, 391–401, DOI: 10.1109/70.954752.
26. Goertzel B., Cognitive synergy: A universal principle for feasible general intelligence. 8th IEEE International Conference on Cognitive Informatics, 2009, 464–468, DOI: 10.1109/COGINF.2009.5250694.
27. Goertzel B., The Embodied Communication Prior: A characterization of general intelligence in the context of Embodied social interaction. 8th IEEE International Conference on Cognitive Informatics, 2009, 38–43, DOI: 10.1109/COGINF.2009.5250687.
28. Goertzel B., OpenCogPrime: A cognitive synergy based architecture for artificial general intelligence. 8th IEEE International Conference on Cognitive Informatics, 2009, 60–68, DOI: 10.1109/COGINF.2009.5250807.
29. Goertzel B., From abstract agents models to Real-World AGI architectures: Bridging the gap. T. Everitt, B. Goertzel, A. Potapov, red. Artificial General Intelligence, Springer International Publishing, 2017, 3–12.
30. Goertzel B., Hanson D., Yu G., A software architecture for generally intelligent humanoid robotics. „Procedia Computer Science”, Vol. 41, 2014, 158–163, DOI: 10.1016/j.procs.2014.11.099.
31. Goertzel B., Monroe E., Toward a general model of human-like general intelligence. „Common Model of Cognition Bulletin”, Vol. 1, No. 2, 2017, 344–347.
32. Griffin T., Yeager E., Adoption of precision agriculture technology: A duration analysis. Proceedings of 14th International Conference on Precision Agriculture, International Society of Precision Agriculture, June 24–27 2018, 1–14.
33. Guizzo E., Hiroshi Ishiguro: The man who made a copy of himself. „IEEE Spectrum”, Vol. 47, 2010, 40–44.
34. Guizzo E., The Man Who Made a Copy of Himself: Hiroshi Ishiguro is Building Androids to Understand Humans –Starting with Himself. IEEE Spectrum, Vol. 52, 2010, 40–44.
35. Hanson D., Olney A., Pereira I.A., Zielke M., Upending the uncanny valley. Proceedings 20th National Conference on Artificial Intelligence, AAAI ’05, 1728–1729.
36. Ishiguro H., Nishio S., Building artificial humans to understand humans. „Journal of artificial organs: the official journal of the Japanese Society for Artificial Organs”, Vol. 10, No. 3, 2007, 133–142, DOI: 10.1007/s10047-007-0381-4.
37. Jacobsen S., Iversen E., Knutti D., Johnson R., Biggers K., Design of the Utah/M.I.T. Dextrous Hand. Proceedings IEEE International Conference on Robotics and Automation, Vol. 3, 1986, 1520–1532, DOI: 10.1109/ROBOT.1986.1087395.
38. Jezierski E., Dynamika robotów. Wydawnictwo Naukowo Techniczne WNT, Warszawa, 2006.
39. Kang H., Zhou H., Chen C., Visual perception and modeling for autonomous apple harvesting. „IEEE Access”, Vol. 8, 2020, 62151–62163, DOI: 10.1109/ACCESS.2020.2984556.
40. Kasprzak W., Rozpoznawanie obrazów i sygnałów mowy. Oficyna Wydawnicza Politechniki Warszawskiej, 2009.
41. Kędzierski J., Janiak M., Budowa robota społecznego FLASH. K. Tchoń, C. Zieliński, red., Postępy robotyki, XII Krajowa Konferencja Robotyki, Świeradów Zdrój, 12–16 września 2012, Oficyna Wydawnicza Politechniki Warszawskiej, Prace Naukowe Politechniki Warszawskiej – Elektronika, Vol. 182, 2012, 681–694.
42. Kędzierski J., Kaczmarek P., Dziergwa M., Tchoń K., Design for a robotic companion. „International Journal of Humanoid Robotics”, Vol. 12, No. 1, 2015, 1–24, DOI: 10.1142/S0219843615500073.
43. Kędzierski J., Muszyński R., Zoll C., Oleksy A., Frontkiewicz M., EMYS—emotive head of a social robot. „International Journal of Social Robotics”, Vol. 5, 2013, 237–249, DOI: 10.1007/s12369-013-0183-1.
44. Lim J., Bae H., Oh J., Lee I., Shim I., Jung H., Joe H.M., Sim O., Jung T., Shin S., Joo K., Kim M., Lee K., Bok Y., Choi D.-G., Cho B., Kim S., Heo J., Kim I., Lee J., Kwon I.S., Oh J.-H., Robot system of DRC-HUBO+ and control strategy of team KAIST in DARPA robotics challenge finals M. Spenko, S. Buerger, K. Iagnemma, (red.), The DARPA Robotics Challenge Finals: Humanoid Robots To The Rescue, 27–69, Cham, 2018. Springer International Publishing, DOI: 10.1007/978-3-319-74666-1_2.
45. Lim J., Lee I., Shim I., Jung H., Joe H., Bae H., Sim O., Oh J., Jung T., Shin S., Joo K., Kim M., Lee K.K., Bok Y., Choi D.-G., Buyoun C., Kim S., Heo J., Kim I., Lee J., Kwon I.S., Oh J.-H., Robot system of DRC-HUBO+ and control strategy of team KAIST in DARPA robotics challenge finals. „Journal of Field Robotics”, Vol. 34, No. 4, 2017, 802–829, DOI: 10.1002/rob.21673.
46. Long Z., Jiang Q., Tao S., Wen F., Liang C., A systematic review and meta-analysis of robotic gripper. „IOP Conference Series: Materials Science and Engineering”, Vol. 782, 2020, DOI: 10.1088/1757-899X/782/4/042055.
47. Luo L., Ogawa K., Peebles G., Ishiguro H., Towards a personality AI for robots: Potential colony capacity of a goal-shaped generative personality model when used for expressing personalities via non-verbal behaviour of humanoid robots „Frontiers in Robotics and AI”, 2022, DOI: 10.3389/frobt.2022.728776.
48. Lutz W., Sanderson W., Scherbov S., The coming acceleration of global population ageing. „Nature”, Vol. 451, No. 7179, 2008, 716–719.
16 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
49. Madrigal A., Inside waymo’s secret world for training self-driving cars – an exclusive look at how alphabet understands its most ambitious artificial intelligence project. „The Atlantic”, August 23 2017.
50. Malczyk G., Morecki A., A mathematical model of a flexible manipulator of the elephant’s-trunk-type. RoManSy 6: Proceedings of the 6th CISM-IFToMM Symposium on Theory and Practice of Robots and Manipulators, 1987, 198–206, Springer US.
51. Margheri L., Laschi C., Mazzolai B., Soft robotic arm inspired by the octopus: I. From biological functions to artificial requirements. „Bioinspiration & Biomimetics”, Vol. 7, No. 2, 2012, DOI: 10.1088/1748-3182/7/2/025004.
52. Melchiorri C., Kaneko M., Robot Hands, [In:] The handbook of robotics. 2016, 463–480, DOI: 10.1007/978-3-540-30301-5_16.
53. Meneses A., Yoshikawa Y., Ishiguro H., Effect of synchronous robot motion on human synchrony and enjoyment perception. „Interaction Studies”, Vol. 22, No. 1, 2021, 86–109, DOI: 10.1075/is.18027.men.
54. Mianowski K., Functional characteristics of a new special gripper with flexible fingers. „Journal of Automation, Mobile Robotics & Intelligent Systems”, Vol. 5, No. 3, 2011.
55. Mianowski K., Berns K., Hirth J., The artificial hand with elastic fingers for humanoid robot ROMAN. 18th International Conference on Methods and Models in Automation and Robotics (MMAR), 2013, 448–453, DOI: 10.1109/MMAR.2013.6669950.
56. Moore C., Peshkin M., Colgate J., Cobot implementation of Virtual Paths and 3D Virtual Surfaces, „IEEE Transactions on Robotics and Automation”, Vol. 19, No. 2, 2003, 347–351, DOI: 10.1109/TRA.2003.808866.
57. Mori M., The uncanny valley. „IEEE Robotics and Automation Magazine”, 2012, 98–100.
58. Morrison D., Tow A., McTaggart M., Smith R., Kelly-Boxall N., Wade-McCue S., Erskine J., Grinover R., Gurman A., Hunn T., Lee D., Milan A., Pham T., Rallos G., Razjigaev A., Rowntree T., Vijay K., Zhuang Z., Lehnert C., Leitner J., Cartman: The low-cost cartesian manipulator that won the amazon robotics challenge. IEEE International Conference on Robotics and Automation, 2018, 7757–7764, DOI: 10.1109/ICRA.2018.8463191.
59. Munson G., The rise and fall of Unimation Inc. – story of robotics innovation & triumph that changed the world, Robot Magazine, December 2010.
60. Park H., Wensing P.M., Kim S., Jumping over obstacles with MIT Cheetah 2. „Robotics and Autonomous Systems”, Vol. 136, 2021, DOI: 10.1016/j.robot.2020.103703.
61. Patz B., Papelis Y., Pillat R., Stein G., Harper D., A practical approach to robotic design for the DARPA Urban Challenge. „Journal of Field Robotics”, Vol. 25, No. 8, 2008, 528–566, DOI: 10.1002/rob.20251.
62. Peshkin M.A., Colgate J.E., Wannasuphoprasit W., Moore C.A., Gillespie R.B., Akella P., Cobot architecture. „IEEE Transactions on Robotics and Automation”, Vol. 17, No. 4, 2001, 377–390, DOI: 10.1109/70.954751.
63. Petrovic K., Picking Robots Address Agriculture’s Labor Shortage Challenge. „Robotics Business Review”, November 5, 2020.
64. Raibert M.H., Blankespoor K., Nelson G.M., Playter R., BigDog, the rough-terrain quadruped robot. „IFAC Proceedings Volumes”, Vol. 41, No. 2, 2008, 10822–10825, DOI: 10.3182/20080706-5-KR-1001.01833.
65. Rus D., Tolley M., Design, fabrication and control of soft robots. „Nature”, Vol. 521, May 27 2015, 467–475.
66. Salisbury J., Roth B., Kinematics and force analysis of articulated mechanical hands. „Journal of Mechanisms, Trans-
missiona and Automation in Design”, Vol. 105, No. 1, 1983, 35–41, DOI: 10.1115/1.3267342.
67. Shintake J., Cacucciolo V., Floreano D., Shea H., Soft robotic grippers. „Advanced Materials”, Vol. 30, No. 29, 2018, DOI: 10.1002/adma.201707035.
68. Stone L., Alphabet’s X launches ‘computational agriculture’ business Mineral. „AI Business”, October 14 2020.
69. Thrun S., Montemerlo M., Dahlkamp H., Stavens D., Aron A., Diebel J., Fong P., Gale J., Halpenny M., Hoffmann G., Lau K., Oakley C., Palatucci M., Pratt V., Stang P., Strohband S., Dupont C., Jendrossek L.-E., Koelen Ch., Markey Ch., Rummel C., van Niekerk J., Jensen E., Alessandrini P., Bradski G., Davies B., Ettinger S., Kaehler A., Nefian A., Mahoney P., Stanley: The robot that won the DARPA Grand Challenge. „Journal of Field Robotics”, Vol. 23, No. 9, 2006, 661–692, DOI: 10.1002/rob.20147.
70. Tranzatto M., Mascarich F., Bernreiter L., Godinho C., Camurri M., Khattak S., Dang T., Reijgwart V., Loeje J., Wisth D., Zimmermann S., Nguyen H., Fehr M., Solanka L., Buchanan R., Bjelonic M., Khedekar N., Valceschini M., Jenelten F., Dharmadhikari M., Homberger T., De Petris P., Wellhausen L., Kulkarni M., Miki T., Hirsch S., Montenegro M., Papachristos C., Tresoldi F., Carius J., Valsecchi G., Lee J., Meyer K., Wu X., Nieto J., Smith A., Hutter M., Siegwart R., Mueller M., Fallon M., Alexis K., CERBERUS: Autonomous legged and aerial robotic exploration in the tunnel and urban circuits of the DARPA Subterranean Challenge. „Field Robotics”, 2022, DOI: 10.48550/arXiv.2201.07067.
71. Urmson C., Baker Ch., Dolan J., Rybski P., Salesky B., Whittaker W., Ferguson D., Darms M., Autonomous driving in traffic: Boss and the Urban Challenge. „AI Magazine”, Vol. 30, No. 2, Summer 2009, 17–28, DOI: 10.1609/aimag.v30i2.2238.
72. Vincent J., Welcome to the automated warehouse of the future: How british supermarket ocado is using robots to make online grocery shopping faster. „The Verge”, May 8 2018.
73. Vukobratovic M., Borovac B., Zero-Moment Point – thirty five years of its life. „International Journal of Humanoid Robotics”, Vol. 1, No. 1, 2004, 157–173, DOI: 10.1142/S0219843604000083.
74. Wang L., Nurzaman S., Iida F., Soft-material robotics. Foundations and Trends in Robotics, Vol. 5, No. 3, 2017, 191–259, DOI: 10.1561/2200000055.
75. White J., Waymo opens driverless robo-taxi service to the public in phoenix. „Reuters”, October 8 2020.
76. Zielińska T., Maszyny kroczące. PWN, 2014.
77. Zielińska T., Novel design and applications of robotics technologies. [In:] History of Service Robots and New Trends, 158–187. IGI Global, 2019, DOI: 10.4018/978-1-5225-5276-5.
78. Zieliński C., Kornuta T., Stefańczyk M., Szynkiewicz W., Trojanek P., Walęcki M., Języki programowania robotów przemysłowych. „Pomiary Automatyka Robotyka”, Vol. 16, No. 11, 2012, 10–19.
17
In order to assess the impact of robots on society, it is necessary to carefully analyze the state-of-the-art, and in particular the fundamental issues that have yet to be resolved, however having significant impact on the potential societal changes resulting from the development of robotics. The aforementioned impact depends on the level of intelligence of robots, so this aspect dominates in the presented analysis. The presentation has been divided into three parts: 1) analysis of technical factors affecting the intelligence and security of robots, 2) analysis of current capabilities of robots, 3) analysis of diverse predictions of how robotics will evolve, and thus the attitudes towards the influence of the result of this development on society. This part of the paper is devoted to the second of the above mentioned three issues.

Keywords
ORCID: 0000-0001-7604-8834
18 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Abstract: In this survey paper some issues concerning a singularity concept in robotics are addressed. Singularities are analyzed in the scope of inverse kinematics for serial manipulator, a motion planning task of nonholonomic systems and the optimal control covering a large area of practical robotic systems. An attempt has been made to define the term singularity, which is independent on a specific task. A few classifications of singularities with respect to different criteria are proposed and illustrated on simple examples. Singularities are analyzed from a numerical and physical point of view. Generally, singularities pose some problems in motion planning and/or control of robots. However, as illustrated on the example on force/momenta transformation in serial manipulators, they can also be desirable is some cases. Singularity detection techniques and some methods to cope with them are also provided. The paper is intended to be didactic and to help robotic researchers to get a general view on the singularity issue.
1. Introduction
Singularities appear in many contexts in robotics and usually cause some problems in motion planning and/or controlling a robot. In this paper singularities are analyzed for different types of robots: mobile/free floating (nonholonomic ones) as well as for holonomic stationary manipulators. In the most common case, singularities arise when some matrices used to plan or control a robot motion lose their full admissible rank and problems of their (generalized) inversion arise. Two aspects are to be mentioned: from a geometrical point of view at singularities motions in certain directions are not permitted, from a numeric perspective either algorithms stop to work or their results are unreliable. Singularities occupy a relatively small part of a space where they are defined. However, their close neighborhood is quite massive and singularity disregarding may cause a numerical instability. Moreover, around singularities some characteristics (like velocities at joints) can take inadmissible, too large values and/or they switch their signs causing undesirable chattering.
On the other hand singularities result either due to improper modeling of a robot or its description is not valid globally. In order to search for a unifying definition of singularities one
needs to consult their linguistic meaning. From a point of view of applied sciences probably the most suitable notion of singularity is covered by its equivalent terms: strange, un-regular, and exceptional. It means that at singularities something unusual happens and this case cannot be treated in a standard (regular) way. From a practical point of view at singularities either a description of the controlled object should be updated or changed or algorithms designed for a regular case modified slightly or substantially. In any case special actions for the singular situation should be foreseen before starting planning or control and while performing regular actions a permanent monitoring should take place to react properly on singular cases. The singularity analysis still attracts attention not only roboticians but also mathematicians [3].
This paper, being extended version of the conference paper [7], is organized as follows. In Section 2 singularities are described in three areas of robotics: for manipulators representing holonomic systems exemplified on the task of inverse kinematics, for nonholonomic systems performing a motion planning task and quite general systems to be controlled optimally. In Section 3 some methods to detect singularities are highlighted while in Section 4 techniques to cope with them are presented. Section 5 concludes the paper.
A standard kinematics for serial, single chain open loop manipulators is given as
For a goal point in the task-space f ∈ x an analytic inverse of (1) can be found only for a few manipulators. Therefore
k : () , ∋→∈ qkq dim = n, dim = m. (1)
19 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 19–26, DOI: 10.14313/PAR_247/19
the Newton algorithm is used, below given in the form valid for redundant, n > m case (for non-redundant manipulators J# is substituted with the standard matrix inversion J−1) [16]
()() () # 1 iiiifi ξ + =+⋅− qqJqxkq (2)
The initial configuration q0 for the iterative process (2) is given and the pseudo-inverse J# of the matrix J is defined via the manipulability matrix
M(q) = J(q)JT(q) as J# = JT(q)M(q)−1. (3)
Sometimes either to increase/decrease importance of some coordinates or to unify units (length-angle coordinates for prismatic-rotational joints) the weighted-version of pseudo-inverse is used
() 1 1T1T , = JWJJWJ (4)
where W denotes a symmetric, positively definite weighting matrix. In any case, to effectively compute inverse (non-redundant manipulators) or (weighted-) pseudoinverse (redundant manipulators) matrix, a square matrix has to be non-singular. The kinematics is exemplified on the 2D planar pendulum, depicted in Fig. 1, with positional kinematics
characteristics can be expressed as angle dependencies, as some row-vectors of the Jacobi matrix are placed on a single hyperplane and some angle relationships between them hold. It can be noticed that the length singular configurations are not typical (for the 2D planar pendulum they appear only at configurations cf. Fig. 2 forming a set composed of isolated points. Theoretically, length singularities of corank s arise when simultaneously s n equality conditions hold, i.e. s rows of the Jacobi matrix vanish. In practice s can be equal to 1 only as at most n independent constraints can be imposed on the configuration space and the constraints are satisfied on a 0-dimensional manifold (separated points). Consequently, the singularities can not be typical at all.
Singular configurations can be classified based on characteristics they depend on. For earth-based stationary manipulators kinematic singularities can be distinguished (depending, beside configurations, on lengths and twists of links) while for free-floating space manipulators dynamic singularities appear as they depend also on masses and inertia parameters of robots. The aforementioned differentiation may be slightly deceptive as kinematic singularities can be assigned as well to problems related to kinematics while dynamic ones to those involved dynamics of robots.
Fig. 1. The planar double pendulum: configuration (q1, q 2), task-space coordinates (x, y), end-effector forces τ and forces at joints (f1, f 2) depicted Rys. 1. Podwójne wahadło planarne: konfiguracja (q1, q2), współrzędne przestrzeni zadaniowej (x, y), siły na efektorze τ i w przegubach (f1, f2)
Fig. 2. Singular configurations of 2D planar pendulum: dots – length singularities, thick lines – angle singularities Rys. 2. Konfiguracje osobliwe dwuwahadła planarnego w przestrzeni konfiguracyjnej: kropki – osobliwości długościowe, linia pogrubiona –osobliwości kątowe
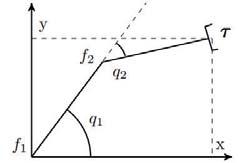
where a1, a2 are lengths of its links and a simplified form to denote trigonometric functions, c12 = cos(q1 + q2), s1 = sin(q1), is used. The Jacobian matrix of the 2D pendulum is given as
From the determinant condition det(
a singular configuration sub-space is derived
where, here and afterwards, denotes any value.
Here we can distinguish length and angle singularities. The former ones are due to vanishing of some rows of the Jacobi matrix (at the configuration q = (0, 0)T (q = ( /2, 0)T) the length of the first (second) row in (6) is equal to zero. The latter ones arise when a row becomes a linear combination of other rows (the exemplary singular configuration ( /4, 0)T). This
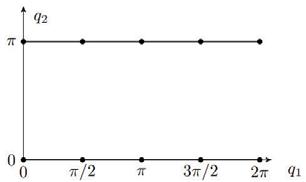
The latter division can be even more complicated as for many systems of robotics their kinematics is directly incorporated into dynamics either in a motion planning within the task-space or at a control level in a cascade kinematic-dynamic scheme.
For any manipulator with a high dimensional, m = 6, taskspace parameterization singularities arise due to the minimal representation of a rotational group ()3. A (3 3) rotational matrix () =3, ∈
composed of columns n, o, a is a nine dimensional object with six independent constraints imposed
n = o = a = 1, n × o = a, (9)
where denotes a cross product and is an Euclidean metrics. Consequently () () dim3963 −= and theoretically three variables are enough to describe any rotation matrix R. Unfortunately, there is no global diffeomorphism between () 3 and 3 (or ). The most common task of robotics, the inverse kinematics, can be effectively solved only at a velocity level, thus some kind of angular velocity should be considered. The angular velocity in the space frame is derived from the formula [] T ω = RR [15] and for two exemplary x-y-x and z-y-x parameterizations of () 3 ∈ R with angles ()T ,, αβγ = p is described by the following matrices
⎡⎤ ⎣⎦
Rnoa (8)
() 11212 11212 , xacac yasas + ⎡⎤⎡⎤ ==⎢⎥⎢⎥ + ⎣⎦⎣⎦ kq (5)
() 11212212 11212212 asasas acacac ⎡⎤ ∂ == ⎢⎥ + ∂ ⎣⎦ k Jq q (6)
J(q)) = a1 a2 s2
= 0
(7)
20 Many Faces of Singularities in Robotics POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
(where rot(axis, angle) denotes an elementary rotation [19]) resulting in angular velocities
To avoid parameterization singularities a redundant, four dimensional, parameterization of the () 3 group with quaternions is used frequently. Another method of avoiding problems with parameterization singularities is to switch parameterizations as matrices R at singularities for different parameterizations are firmly well separated, cf. Eq. (14), [4].
Singular configurations are usually detected by a drop of the maximal allowable rank of a Jacobi matrix J. The deficiency, a corank
corank(J) = n − rank(J) (15)
can serve as another factor for the classification of singularities. Typically, the corank(J(q)) = 1 and those singularities are unavoidable, contrary to avoidable singularities characterized by higher coranks. A corank one set forms in the n-dimensional configuration space a (n − 1) dimensional subspace and splits the configuration space into two pieces. If initial and final configurations of a planned motion are located not in the same component, then a continuous curve connecting them has to cross the singularity region at least once and a singular configuration is inevitably met. When a singularity is of corank two or more, then it can be avoided as the singularity set is too small to split the configuration space into separated components and a trajectory between any two configurations can be planned avoiding this set.
As A matrices should be inverted to work within a task space including coordinates p,
For a special class of manipulators with the last three motion axes crossing at a single point a kinematic decoupling technique [19] can be applied to simplify solving an inverse kinematic task. Unfortunately, even for the manipulators singularities can also be encountered.
Till now singular configurations were considered as troublemakers. In some circumstances, however, they may be even desirable. Based on the virtual work principle
,, τ = xqf (16)
one can calculate how forces/momenta t applied at the end-effector of a manipulator are transformed into reactions forces/ momenta at joints f (cf. Fig. 1)
() T = Jqf τ (17)
then for a pair of angles β parameterization singularities are encountered
In Eq. (16) ·, · stands for the inner product and , qx are velocities in the configuration/task space, respectively.
which correspond to rotation matrices at the singularities (14) respectively. From Eq. (14), it can be deduced that at singular configurations only a sum/difference of angles a, g can be determined uniquely. At regular configurations two sets of angles correspond to a given rotation matrix. Moreover, the aforementioned derivations and observations are also valid for all other three element parameterization of () 3 having singularities at different locations within the space.
To illustrate the force/momenta transformation (17) let us, once again, analyze the double pendulum (5), (6) interpreted as a simplified model of a human standing in the up-right singular configuration, ()T /2,0. π = q In this case the gravity force ()T 0, y mg τ == τ acts along y-axis, where m denotes a mass and g stands for the gravity acceleration g = 9.81 m/s2:
faa fa τ
==
(18)
At this particular, singular configuration no reaction forces act at joints what is the optimal pose for a human to stand for a long time. Quite different result is obtained when the optimal configuration of a simplified 2dof human hand while handwriting is searched for. This time the manipulability measure, introduced by Yoshikawa [22]
()()()mandet = qMq (19)
for the planar double pendulum (5) is to be optimized. After substituting (6), into (3) and (19) one obtains
21
(10)
(11)
(12)
(13)
112 22 ⎡⎤ ⎡⎤⎡⎤⎡⎤
0 00 00 y ⎢⎥ ⎢⎥⎢⎥⎢⎥ ⎣⎦⎣⎦⎣⎦ ⎣⎦
() ()122 mansin. aaq = q (20)
Thus, the optimal configuration for handwriting is q2 = ± p/2 being as far as possible from singularities, cf. Eq. (7).
The aforementioned examples display a general position-force duality. Consequently, a simultaneous optimization of forces and positions is not possible and only compromised (weighted) solution is possible when both factors are important.
The second class of models considered result from nonholonomic constraints in the Pfaff form
() 0. = Aqq (21)
Those constraints are due to no lateral/longitudinal slippage of wheels of mobile robots [6] or a preservation of the angular momentum for free floating robots [5].
Let us start with the unicycle robot with a single no-side slippage constraint (22)
where the configuration ()T ,,xy θ = q is composed of position and orientation of the robot.
For a control purpose it is desirable to have rather a driftless control system
It can be checked, by direct calculations, that possible nonzero vector fields derived from generators g1(q), g2(q) with the use of a Lie bracket operation [·, ·] are of the form
From (30) it can be concluded that the system (28) is nonholonomic (and a small time locally controllable) as it satisfies the Chow theorem (its Lie algebra is of the full rank, LARC) [2]
It is also nilpotent, cf. Eq. (32) and singular at configurations (0, )T because outside the set extra one bracket
()()
m ii i u == ∑ qGqugq (23)
1
than equation on constraints (21). Thus a matrix ()Gq should be selected that spans a space perpendicular to rows of the matrix ()Aq
()() = AqGq 0 (24)
As dimq = 3 and there is a single constraint, r = 1 so two vector fields should be found m = n − r = 2 perpendicular to A(q) and independent of each other. The first is quite simple
()()T 1 0,0,1 = gq (25) but the second could be
() ()() ()T 2 1/sin,1/cos,0 θθ = gq (26)
apparently introducing a singularity at the subspace of the configuration space ( , , kp/2)T. This type of singularity we name a modeling singularity as due to wrong model formulation (23), (25), (26), singularities were introduced. When modeling process is performed accurately, there is no modeling singularities and the truly good vector should be selected as follows
() ()() ()T 2 cos,sin,0. θθ = gq (27)
Now another family of models of the form (23) is considered
is enough to satisfy LARC. What is even more important when planning a motion between configurations (q1(0), q2(0), q3(0))T and (q1(0), q2(0), q3(T))T (two first coordinates are assumed to be equal as it is quite easy to get their desirable values by switching on a single control either u1 or u2) outside the singularity region controls in the form:
()()()() 1122sin,cos, utatutat ==ωω (34)
are able to steer the system into the goal configuration. In Eq. (34) the base frequency 2/, T ωπ = T is a time horizon, and a1, a2 are variables depending on q3(T) − q3(0). In a singularity region the controls (34) are useless as they do not change the final value of coordinate q3 despite manipulating with amplitudes and phases of controls. It appears that only controls with appropriately increased frequency of the second control
()()() () 1122sin,cos, utatutajt ==ωω (35)
can solve the planning problem. This example shows that at singular configurations a switching between control scenarios should be performed. Obviously one can take a mix of sinus/ cosine functions but a redundant representation of controls is not desirable as it increases a computational complexity. One more message from this example is that one should know a structure of a controlled system to properly design a parameterized family of admissible controls. In this simple case one could calculate and prove which controls are good and which are useless. In a general case, with no useful information on the structure one can frequently take harmonic controls up to a given boundary frequency, but unfortunately it introduces a huge redundancy and problems with effective and fast motion planning.
In the previous example at singular configurations, cf. (32), (33), more than the minimum number of vector fields has to be used to preserve the LARC condition. In the next example at singular configurations the model cannot be used in planning
(28)
(29)
j!
kjk k adqkj adkj ⎧ ⎛⎞ ⎪⎡⎤ ≤ ⎪ ⎣⎦ ⎜⎟ ⎝⎠ ⎨ ⎪ ⎡⎤ > ⎪ ⎣⎦ ⎩ gg gg (30) and in (30), by definition 0 1 1,and0!1. q ≡= (31)
In fact () () T 121 T 12
,=0,0,,for j-k! , ,=0,0,0,for
1212 det,=!0. j adj⎡⎤ ⎡⎤ ∀≠ ⎣⎦ ⎣⎦qgggg (32)
(33)
22 Many Faces of Singularities in Robotics POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
at all. The kinematic car [11], belongs to the family of models given by (23) with m = 2 and vector fields
The configuration vector ()T ,,,xy θφ = q is composed of position and orientation of the mid-point of the rear axis, φ is the angle of the steering front wheel and L is a constant parameter, the distance between front and rear axes. The vector field g1(q) and its descendants like
are badly conditioned at singular configurations characterized by /2.φπ =± To avoid the singularities and to cover all cases of a practical value, the configuration space is restricted. The range of admissible angles () maxmax,,φφφ ∈− with max 0/2 <<φπ impacts also the minimum turning radius of the vehicle minmax /tan, L ρφ = [11].
A motion planning for systems (23) with an additional drift can be solved using the Endogenous Configuration Space Method [21]. The method is a variant of the Newton algorithm of inverse kinematics with kinematics specifically defined to nonholonomic systems.
The system (23) is linearized along trajectory corresponding to given controls u(·)
is non-singular. In this way another classification of singularities can be proposed. It appears that despite the trivial control
()⋅≡ u 0 singular configuration cannot be determined analytically as both fundamental matrix () , Tt Φ at time t, (42), and consequently the Gramm matrix GR can be calculated only numerically and one cannot be sure that the singularities do not depend on time intervals assumed while integration. For manipulators, like in the case of 2D planar pendulum, singular configurations are characterized in a pure analytic form and frequently configurations can be described with close form formulas.
It should be mentioned that the motion planning based on the endogenous configuration space method was presented in the non-parametric version. In many practical applications its parametric version is used [17] when controls () u are selected in a parametric form
and () j t φ are taken from a functional basis (for example Fourier one) on the interval [0, T] and λ collects all parameters of controls. As in the non-parametric method also in this case singularities may arise and one more problem appear how to properly select the representation of controls (45).
A standard method in the optimal control, also used in robotic applications, is to apply the Pontriagin’s Maximum Principle (PMP) [13]; [10]. For a given system of differential equations
and v( ) is a small variation of controls. Afterwards a Jacobi matrix is formulated based on the formula
co-state variables p are introduced. Then the Hamiltonian function H(q, p, u) is formulated and Hamiltonian equations afterwards. Finally, based on the PMP equation
In practice the matrices () , Ts Φ for s [0, T] can not be calculated analytically. Usually, the interval [s, T] is divided into K (mostly) equi-length sub-intervals
and the value of () , Ts
is approximated as follows
where I is the identity matrix. In order to avoid too excessive computations, a recursive formula is used based on the identity:
where T > s1 > s. The Newton algorithm of motion planning allows to modify controls to approach end-point of a current trajectory to the desired goal configuration if only the Gramm matrix
the first order necessary condition is formulated. In a typical case the condition depends explicitly on u and a control law () , ∗∗∗ uqp is formulated as a function of the extreme pair ( ) ,. ∗∗ qp After substituting the controls into the Hamiltonian equations, a two-point boundary value problem is to be solved [9]. It should be pointed out that the control law may not be determined at some (isolated) points on the time axis, not influencing substantially the resulting trajectory. Unfortunately, for some optimal control problems the first order necessary condition does not depend on u at all and some extra effort should be taken to retrieve solvability of the problem [1]. Usually, higher order optimality conditions are considered (when the first among consecutive derivatives w.r.t. u of the Hamiltonian function depends on u explicitly) or Hamiltonian function is disturbed slightly to retrieve applicability of the first order necessary optimality condition. In any case, special measures should be taken to restore the dependence of ∗ u on (),. ∗∗ qp
Singular optimal controls are more commonly encountered in economics or biology rather than in technical sciences. Such controls are illustrated on the example taken from [12], where sales optimization
() () () T T 12cos,sin,tan/,0,0,0,0,1. L θθφ == gqg (36)
(37)
()() tt=+ABv ξ ξ (38) with () () () () ()()()=,= tt ttt ∂ ∂ Gqu ABGq q (39)
() () () () ()() 0 , 0 , T T Ttttdt ⋅⋅= ∫ q JuvBv Φ (40)
the fundamental matrix () , Tt Φ satisfies () () ()() , ,,,. n ts ttsss t ∂ == ∂ AI Φ Φ Φ (41)
where
T − s = s K
Φ
() () () () ,+1/2. iK Tssiss =+−ΔΔ ∏ 1 IA Φ (42)
() ()() 11 ,,,,
Φ
TsTsss =
Φ Φ (43)
(44)
()() 1 ,1,,, i N ijij j uttin φλ = == ∑ (45)
() , = qFqu (46)
an integral quality function (47)
and
()()max,,,, ∗∗∗∗∗ ∈ = u HqpuHqpu (48)
23
is performed for the model and the initial condition given below
In (49), (50), u(t) denotes a fraction of stock to be reinvested while x(t) stock reinvested/sold. Naturally, the control is constrained () 0,1. ut ∈ ⎡⎤ ⎣⎦ For the fixed time T > 1, the optimal control takes the form
and are singular on the interval [T − 1, T]. In robotics bang-bang rather singular controls are encountered for the minimum-time motion planning [18], or the Hamilton function depends on a square of controls (so it is not linear) when the energy of motion is involved in the quality function.
performed are useless for a regular case algorithm. Therefore a reasonable compromise between a computational effort and usefulness of results should rely on using information gathered at detecting singularities also in a regular control mode. An example for the practical and effective approach is provided when the SVD algorithm helps to compute the generalized inverse matrix of J based on the formula
1T , = # JVDU (53)
where D−1 = diag(1/dii). Previously, the diagonal matrix D was used to detect singularities too.
For holonomic manipulators singular configurations can be detected in two ways. A drop of the Jacobi matrix rank can be checked either by equating to zero n
determinants of all (m m) square sub-matrices of the Jacobi matrix or with checking only one determinant of the manipulability matrix (3). The first method seems to be more complicated, but for n = m + 1 it is probably simpler that the second one, as in the case of the planar 3D-pendulum. Both methods give analytic formulas for singularities but they do not provide, easy to determine, information on a corank of the singularity. For this purpose one can use the Singular Decomposition Value, SVD, algorithm propagated in robotics by Maciejewski and Klein [14] which factorizes the Jacobi matrix into
J = UDV T (52)
where () , m ∈ U () n ∈ V are matrices that belong to special orthogonal groups of appropriate sizes, and D is a diagonal matrix with singular values on its main diagonal. The number of singular values with (almost) zero values is equal to the corank (15) of the Jacobi matrix at a singular configuration. Unfortunately, SVD is a purely numeric algorithm and the analytic form of the decomposition is not available.
For nonholonomic systems, the LARC is checked by generating, with the Lie brackets, more and more complex vector fields, starting with generators gi(q) of the system (23). Then, the vector fields are added row-by-row into a matrix and the rank of the matrix is checked after each addition. Here also the checking can be simplified as instead of using all vector fields, one can take only those that belong to the Ph. Hall basis without loosing any rank information.
In many algorithms of robotics a permanent evaluation of a distance to singularities is to be performed to find a right moment to (re-)act properly. The distance depends not only on a current configuration but also on some geometrical parameters. Therefore constants used to detect a neighborhood of singularities should be somehow correlated with the parameters.
One more important issue related to a computational complexity and detection of singularities should be addressed. The detection of a neighborhood of singularities can be time-consuming, especially when performed frequently. On the other hand when a test for singularity is negative, all computations
For holonomic systems (manipulators) the simplest method of coping with singular configurations is to make robust the badly-conditioned manipulability matrix M, (3). It is done by adding to the matrix a small disturbing matrix and running the Newton algorithm (2). When configurations generated with the algorithm leave a neighborhood of a singularity region, the perturbation term is switched off. In practice it is advised to weight components of the identity diagonal matrix I m with some coefficients corresponding to the importance (range and units) of coordinates of forward kinematics and make them comparable.
Another class of methods relies on the principle of extrapolation of trajectory behavior gathered before entering a singularity region into its future evolution. As an example, a tunneling method of passing through singularities proposed by Dulęba and Sąsiadek [8] can be recalled. This method extrapolates linearly singular values of the Jacobi matrix collected in matrix D, cf. (52).
The more sophisticated method to deal with singularities has been developed by Tchoń and coworkers [20] being based on a normal form approach. At first it detects a type of singularity which is approached. Then, with appropriately constructed diffeomorphisms, it transforms a task from the task space into a joint space. In the latter space a trajectory is planned around singularities. The normal form method is computationally involved.
When a robot is redundant it can be tried to avoid approaching to singularities by optimization within the null space of the Jacobi matrix. In this case the right-hand side of Eq. (2) is supplemented with the following term
where a differentiable function f(q) should penalize approaching singularity. A good candidate for the function is a manipulability measure (19) (without the square root that complicates the differentiation).
As it was mentioned previously, in some situations switching between a regular-case model and another well-conditioned model in vicinity of singularities is indispensable.
In this paper various exemplifications of singularities in robotics were highlighted. The singularities pose some problems in motion planning and control of robots where some algorithms are badly-conditioned while other stop to work at all. In practice a singular cases should be considered separately from regular ones. It should be also pointed out that a problem of singularities is not focused on some sub-spaces of a general
() 0 1 T uxdt ∫ (49)
() 0 ,0.xxuxx =⋅= (50)
(51)
⎛⎞ ⎜⎟ ⎝⎠
m
()() () # , m f ρ ∂ ∂ IJqJq q (54)
24 Many Faces of Singularities in Robotics POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
space considered. It is also extended to points close to singularities when some numerical problems are encountered as well. Some methods of the detection and coping with singularities were also discussed.
1. Bryson Jr, A.E., Ho Y.C. (eds.) Applied Optimal Control Optimization, Estimation, and Control, chapter Singular Solutions of Optimization and Control Problems. Hemisphere Publ. Co., Boca Raton, 1975.
2. Chow W.L., Über Systeme von linearen partiellen Differentialgleichungen erster Ordnung. “Mathematische Annalen”, Vol. 117, 1940/1941, 98–105.
3. Donelan P.S., Singularities of robot manipulators [In:] Singularity Theory, 2007, 189–217. World Scientific. DOI: 10.1142/9789812707499 0006.
4. Dulęba I., On avoiding representation singularities. [In:] IX Symposium on Simulation of Dynamic Processes, 1996, 345–350, Chocholowska Valley, (in Polish).
5. Dulęba I., Algorithms of motion planning for nonholonomic robots. Wroclaw University of Technology Publishing House, Wroclaw 1998.
6. Dulęba I., Kinematic Models of Doubly Generalized N-trailer Systems. “Journal of Intelligent & Robotic Systems”, Vol. 94, No. 1, 2019, 135–142, DOI: 10.1007/s10846-018-0817-5.
7. Dulęba I., Karcz-Duleba I., Many faces of singularities in robotics. [In:] 4th Conference on Aerospace RObotics. Zielona Góra, Poland, 2022.
8. Dulęba I., Sąsiadek J., Nonholonomic motion planning based on newton algorithm with Energy optimization. “IEEE Transactions on Control Systems Technology”, Vol. 11, No. 3, 2003, 355–363, DOI: 10.1109/TCST.2003.810394.
9. Holsapple R., Iyer R., Doman D., New, fast numerical method for solving two-point boundary-value problems. “Journal of Guidance, Control, and Dynamics”, Vol. 27, No. 2, 2004, 301–304. DOI: 10.2514/1.1329.
10. Kirk D., Optimal control theory: an introduction. Prentice-Hall, 1970.
11. LaValle S., Planning algorithms. Cambridge Univesity Press, 2006.
12. Lenhart S., Optimal control theory in application to biology, lecture on bang-bang and singular controls. web.math.utk. edu/˜lenhart/smb2003.v2.html, 2003.
13. Locatelli A., Optimal control theory: an introduction Birkhauser, 2001.
14. Maciejewski A., Klein C.A., The singular value decomposition: Computation and applications to robotics. “The International Journal of Robotics Research, Vol. 8, No. 6, 1989. 63–79. DOI: 10.1177/027836498900800605.
15. Murray R.M., Li Z., Sastry S.S., A mathematical introduction to robotic manipulation. CRC press, 1994, DOI: 10.1201/9781315136370.
16. Nakamura Y., Advanced Robotics: Redundancy and Optimization. Addison-Wesley, 1991.
17. Ratajczak J., Tchoń K., On dynamically consistent Jacobian inverse for non-holonomic systems. “Archives of Control Sceinces”, Vol. 27, No. 4, 2017, 557–573, DOI: 10.1515/acsc-2017-0033.
18. Shin K., McKay N., Minimum-time control of robotic manipulators with geoemetric path constraints. “IEEE Transactions on Automatic Control”, Vol. 30, No. 6, 1985, 531–541, DOI: 10.1109/TAC.1985.1104009.
19. Spong M.W., Hutchinson S., Vidyasagar M., Robot Modeling and Control. Wiley, 2 edition, 2020.
20. Tchoń K., Muszyński R., Singular inverse kinematic problem for robotic manipulators: A normal form approach. “IEEE Transactions on Robotics and Automation”, Vol. 14, No. 1, 1998, 93–104, DOI: 10.1109/70.660848.
21. Tchoń K., Ratajczak J., Singularities, normal forms, and motion planning for non-holonomic robotic systems. [In:] G.N. M. Ahmadi (ed.), 6th Int. Conf. on Control, Dynamic Systems, and Robotics, Ottawa, 2019, DOI: 10.11159/cdsr19.127.
22. Yoshikawa T., Dynamic manipulability of robot manipulators. „International Journal of Robotics Research”, Vol. 4, No. 2, 1985, 3–9 DOI: 10.1177/027836498500400201.
Streszczenie: W przeglądowym artykule przedstawiono wybrane zagadnienia dotyczące różnych koncepcji osobliwości spotykanych w robotyce. Analizowane są osobliwości w zadaniu odwrotnej kinematyki dla manipulatorów szeregowych, planowaniu ruchu układów nieholonomicznych oraz sterowaniu optymalnym. Rozważane zadania obejmują duży obszar praktycznych systemów robotycznych. Podjęto próbę zdefiniowania pojęcia osobliwości niezależne od konkretnego zadania. Zaproponowano kilka klasyfikacji osobliwości w zależności do różnych kryteriów oraz zilustrowanych na prostych przykładach. Osobliwości przeanalizowano z numerycznego i fizycznego punktu widzenia. Ogólnie, osobliwości stwarzają pewne problemy w planowaniu ruchu i/lub sterowaniu robotami. Jednakże, jak pokazano na przykładzie transformacji sił/momentów w manipulatorach szeregowych, w niektórych przypadkach mogą one być również użyteczne. Przedstawiono także techniki wykrywania osobliwości oraz metody radzenia sobie z nimi. Praca w założeniu ma charakter dydaktyczny i ma pomóc badaczom z kręgu robotyki uzyskać ogólny pogląd na zagadnienie osobliwości.
25
ORCID: 0000-0002-2278-0816

ORCID: 0000-0003-4946-2225

26 Many Faces of Singularities in Robotics POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Abstract: Biology not only provides inspiration in the design of walking machines, but also suggests detailed design solutions. Concise information on legged locomotion in the animal world is presented, and the relationships between engineering solutions and the biological world are shown. The construction of animal legs is briefly described and the most commonly used leg structures for walking machines are discussed, including references to biological patterns. Examples of bio-inspired walking machines developed by our team are given and several concepts of bio-inspired robots are discussed. The general aim of the article is to show how knowledge of the animal world inspires innovative design solutions for robots intended for practical applications.
1. Introduction
Invention of electric motor by M.H. Jacobi in the first part of the XIX century marked a significant step in the development of biologically inspired robotics. The fist prototypes of the electrically powered moving machines having human appearance were presented at the beginning of the XX century. Walking machines being developed since the mid of the XX century are an obvious example of biological inspiration. It is clear that biological legged locomotion is an efficient form of displacement over rough terrain. The surface may be uneven, soft, muddy and generally unstructured. Such environment is easily accessible to animals, but not to wheeled vehicles, therefore legs demonstrate a significant advantage. The capabilities of legged robots are constantly enhanced, mainly due to the advances made in computer technologies, however, how to design legged robots as efficient and agile as animals, is still an unresolved problem. Designers of legged machines must make many choices, which determine the technical features of the developed devices. The most important are the decisions pertaining to: −the mechanical structure and leg configuration (number of legs, their kinematic structure, joint design), actuating and drive mechanisms (motor types and their power), placement of motors and the way that motion is transmitted from motors to leg joints,
basic types of gait (speed of motion, number of legs supporting the body during each phase of the chosen gait, duty factors, leg transfer sequences etc.).
An important problem is the specification of the control system (control software and hardware as well as their architectures), e.g. [29, 30, 36]. The autonomy of actions depends on the motion control principles. The information about the current machine state must be provided by internal sensors (proprioceptors). Adequately selected external sensors (exteroceptors) must provide information about the state of the environment. Sensory data must be processed and fused delivering the information used by the control software, which is responsible for the machine’s ,,intelligence”. The distribution of the on-board motors and electronics as well as placement of cables and sensors should be such as to avoid overheating and mutual interference. The placement of machine parts determines the location of the center of mass, what is relevant to the postural stability. Such stability is associated with the range of possible gaits and possible step lengths. During the design process, the estimation of power consumption, taking into account the machine’s weight, payload, motion conditions (soft, hard terrain, inclined terrain, etc.) is very important. These data are also needed for the design of motion transmission systems and for the selection of sufficiently powerful actuators. The answer to the above technical problems is provided not only by engineers by also by biologists, neurologists or even specialists in social sciences. Biology provides inspiration, helping to release design creativity in search for novel solutions. Neurology inspires the development of control systems. Social science supports the work on robot-user interfaces and the design of human companion robots. Our paper attempts to illustrate how biology is utilized by designers of walking machines.
The paper is organized as follows. The properties of animal gaits are summarized first, presenting the method of gait description. Postural stabilization is discussed next. Animal leg structures and postures are described subsequently, considering
27 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 27–37, DOI: 10.14313/PAR_247/27
the ways of postural stabilization. Robot leg design concepts are presented and illustrated by examples. Several biologically inspired foot concepts are presented. Finally, the role of compliance in biological and robot locomotion is summarized and examples are provided. The paper ends with concussions. Since biological legged locomotion is one of the most effective over rough terrain, our attention is focused on walking machines.
Biological patterns are commonly used as an inspiration for the selection of gait and motion synthesis. In this section we summarize the main features of biological gait. Locomotion of insects is mainly statically stable. It is described by simple rules directly relating the sequence of leg transfers with the motion speed. Static stability means that, at every instant of time, the vertical projection of overall body mass center onto the ground remains inside the polygon, the vertices of which are formed by the footprints of the supporting legs. The features of periodic statically stable gaits of insects were identified over forty years ago by Hughes and Wendler, and then summarized by Wilson [19]. They are described by five simple rules: −the legs on one side of the body are moved one after another, and such order goes from the back to the front of the body, no leg will be transferred before the leg behind is placed on the ground, the transfer time is constant for every leg and does not depend on the walking speed, opposite legs in the same body segment are never moved simultaneously, −time of the leg support phase (when the leg is in contact with the ground) decreases when the walking speed increases, what implies that with the increase of walking speed walking frequency increases, the time intervals between lifting of two adjacent legs on the same side of the body are similar, but those intervals change when the walking frequency changes.
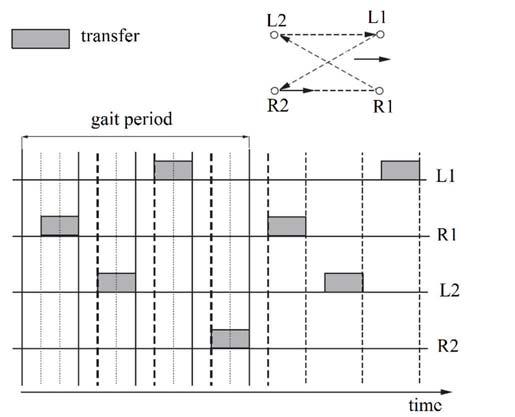
At higher speeds, and when avoiding obstacles, insects retain dynamic, not static motion stability. The locomotion of legged amphibians and reptiles is statically stable too. Many mammals, including human beings, move maintaining dynamic, not static, postural stability. Only during the slowest gait, named quadruped crawl, four-legged mammals utilize a statically stable gait. Dynamic stability is the result of the balance of forces and torques acting on body parts of a moving animal or robot. Due to such equilibrium the body reproduces the desired trajectory of motion while maintaining the desired configuration.
Synthesis of statically stable periodic gaits is not difficult. Motion description of walking hexapods uses gait diagrams obtained from the observation of insect motion. The gait diagrams represent the timing pattern of leg transfers. The gait diagrams are also commonly used when describing the gait of quadrupeds. Figure 1 shows the diagram of the quadruped crawl, which is the slowest gait used by four-legged animals. Legs are transferred one after the other. There are also intervals in which all legs support the body. Such gait was implemented in several walking machines developed by our research team [35].
When designing statically stable gaits, not only the sequences of leg transfers, but also the leg motion ranges must be properly selected, however it is rather an easy task. When the mechanical structure and masses of all body parts are known, it is not difficult to calculate the position of the overall mass center. The leg back stance position and gait stride
must be such that the vertical projection of the mass center is inside the supporting polygon, thus assuring static stability. Despite relative simplicity of periodic gait design, planning of leg movement sequences avoiding obstacles is still a valid research problem. Still there is an ongoing search for effective methods that combine real-time environment perception and motion planning.
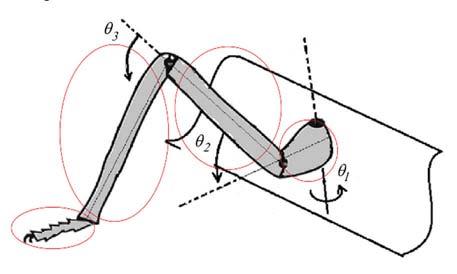
The dynamic gait of quadruped mammals cannot be described as simply as those of insects. Leg transfer sequences, support time of each leg and the time intervals between leg transfers do not change in such a regular way as it is in the case of insects. The methods of designing dynamically stable gaits are more complex. Many of them take into account the ZMP (Zero Moment Point) criterion [18] in motion synthesis. Real-time postural adjustments are needed to equilibrate the acting forces and torques. Body dynamics is crucial in this case. A broad range of different approaches is employed [13, 17, 22, 27].
Legged machine locomotion imitates animal locomotion. It is obvious that such locomotion is easier to achieve when the structure of the robot imitates its biological counterpart (insect, quadruped mammal or a human being). Majority of multi-legged walking machines are hexapods and quadrupeds. The leg structures and postures are similar to those of reptiles,
Fig. 1. Gait diagram for a quadruped crawl, L denotes the legs on the left hand side of the body and R – the legs on the right hand side, dashed vertical lines mark the beginnings of leg transfers Rys. 1. Diagram chodu czteronożnego, L oznacza nogi po lewej stronie ciała, R – nogi po prawej stronie, przerywane linie pionowe oznaczają początki fazy przenoszenia poszczególnych nóg
28 Transforming Biological Patterns into Robot Concepts POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Fig. 2. Typical structure of the insect leg. The ellipses mark the main segments Rys. 2. Typowa struktura nogi owada. Główne segmenty zaznaczono elipsami
amphibians or insects. Humanoids obviously resemble humans. In this section we briefly describe biological patterns, which are relevant to walking machine design.
Pairs of legs of insects and legged vertebrates not only differ structurally, but contribute to the body movement in a different way. Animals use legs not only for walking, but also for jumping, swimming, catching of pray, as well as for food collection. Their legs have a large work space and the leg-ends are complex multi-functional structures.
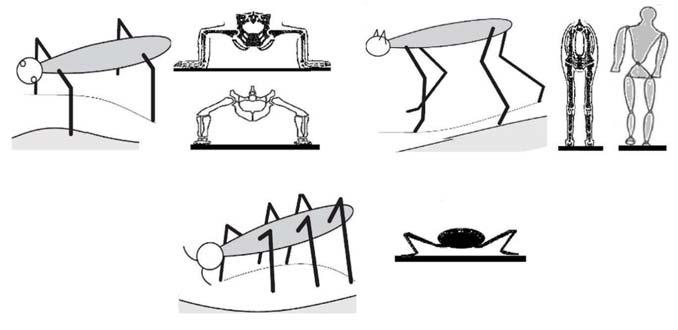
Despite of the differences in the leg proportions and the differences in the leg postures, there is one representative model, which is commonly used by walking machine designers. This model of the insect leg is shown in Figure 2. The leg has four main segments (hip, thigh, shank and foot) and three degrees of freedom (DOF). Two first DOF are located near the trunk and are responsible of up-down and backward forward movement, the third DOF is responsible for leg extension.
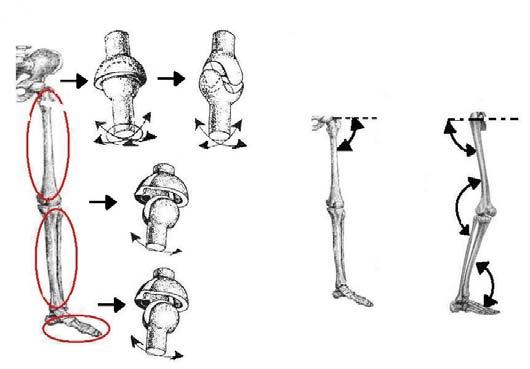
The legs of vertebrates consist only of 3 main parts: thigh, shank and foot. Taking into account the dominant motion ranges, the human leg can be described as a 4DOF structure with: knee and ankle joints with 1DOF each, and hip joint with 2DOF.
Figure 3 shows a human leg and its simplification into a 4DOF system.
The legged amphibians and reptiles use the sprawling legs posture, what results in a larger support polygon and trunk being lower over the ground, compared to the legged mammals. Figure 4A presents an amphibian and reptile posture, with sprawling legs (side view and frontal view).
Figure 4B shows the mammalian posture. Here, for better illustration, besides the side view, the frontal view of a horse and of a human are shown. Figure 4C presents the side and frontal view of the insect posture. More detailed description of the animal leg structures and postures can be found in [21].
As it was already emphasized, designers of walking machines often refer to the patterns exhibited by insects and legged vertebrates. The research on machines that move quickly, maintaining dynamic stability, is gaining momentum. The precursor of this type of research is M. Raibert. He started by first building a one-legged hopping machine and subsequently moved to bipedal, and four-legged jumping machines [11].
Being inspired by insects, and having in mind statically stable gaits, very often the legs of six-legged and four-legged machines are constructed as serial mechanical chains with three revolute DOF’s (Figure 5A). The first two degrees of freedom (closest to the trunk) are separated by a short link – equivalent of the hip bone. The third degree of freedom is located in the knee. When small servomotors are used as actuators two of them are placed side by side in the hip joint, what results in a very short length of the first link (Figure 5B).
Some motor placements impose limits on the motion ranges, and then only one or very few postures are achievable. In general, when only revolute motors are applied, postural changes are nominally possible, but structures with linear actuators or with prismatic DOFs fix the leg posture. Figure 5C illustrates a 3DOF structure with two prismatic joints and one revolute. The reptile posture of this leg cannot be changed. The leg presented in Figure 5D has three revolute joints, however the application of two linear actuators does not permit postural modification from the insect type. The pantograph system is often used in walking machines, however its mechanical linkage must be designed carefully, so that the leg end closely follows a straight line during the support phase. Moreover, a pantograph introduces postural limitation. Figure 5E shows a leg with a pantograph having one revolute and one prismatic joint providing the leg lift. The leg is designed for a fixed insect posture. Figure 5F presents the design with two sliders. Here the posture is similar to a human bent leg.
Multi-legged walking machines usually utilize the sprawling posture, what is beneficial for a statically stable gait over rough terrain. Besides that only a fixed walking posture is usually used. However the observation of insect and decapod locomotion (e.g. crabs) shows that they change the leg posture significantly, especially when crossing over obstacles. Translation of this feature into the technical realm requires special design solutions enabling postural modifications.
AB
Fig. 3. Simplification of a human leg. Ellipses mark the main segments Rys. 3. Uproszczona struktura nogi człowieka. Główne segmenty zaznaczono elipsami
coronal plane saggital plane
AB C
Fig. 4. Leg postures, (A) reptile and amphibian, (B) mammalian, (C) insect Rys. 4. Typowe postury nóg, (A) gada i płaza, (B) ssaka, (C) owada
29
Fig. 5. Design of a walking machine leg, (A) structure imitating an insect leg, (B) design in which the equivalent of the hip bone is produced by overlapping servo motors, (C) structure with two prismatic joints and one revolute joint, fixed reptile posture, (D) structure with three revolute joints, two linear actuators limit the ability for postural change, fixed insect posture, (E) pantograph based design with revolute degree of freedom (DOF) actuating the pantograph reconfiguration and a prismatic DOF providing the leg lift, insect posture, (F) pantograph based design with two sliders actuating pantograph reconfiguration, amphibian posture Rys. 5. Schematyczne widoki konstrukcji nóg maszyn kroczących, (A) konstrukcja imitująca nogę owada, (B) konstrukcja, w której dwa stopnie swobody stawu biodrowego napędzane są przez przylegające do siebie serwosilniki, (C) konstrukcja z dwoma przesuwnymi stopniami swobody i jednym przegubem obrotowym (typowa postura nogi gada), (D) konstrukcja z trzema przegubami obrotowymi, zastosowane dwa siłowniki liniowe ograniczają możliwość zmiany postury (postura nogi owada), (E) konstrukcja wykorzysująca pantograf, przegub obrotowy umożliwia rekonfigurację pantografu a przegub przesuwny zapewnienia podnoszenie nogi (postura nogi owada), (F) konstrukcja wykorzystująca pantograf z dwoma przegubami liniowymi umożliwiającymi rekonfigurację pantografu (postura nogi płaza)
In this subsection we focus on leg designs. Our research team at Nanyang Technological University (Singapore) proposed differential drive mechanism for the hip joint [20] of the robotic leg. This mechanism provides two degrees of freedom in one joint, actuated together by two motors. The motion direction depends on the difference between the number of revolution executed by each of the motors. Such solution decreases the number of mounting elements, therefore the leg workspace is large and the leg is light. This solution was applied in a four-legged machine and in six-legged machines. Figure 6 presents the leg design (the circle marks the hip joint) and the views of different leg postures. The motions and gaits using such postures were successfully tested.
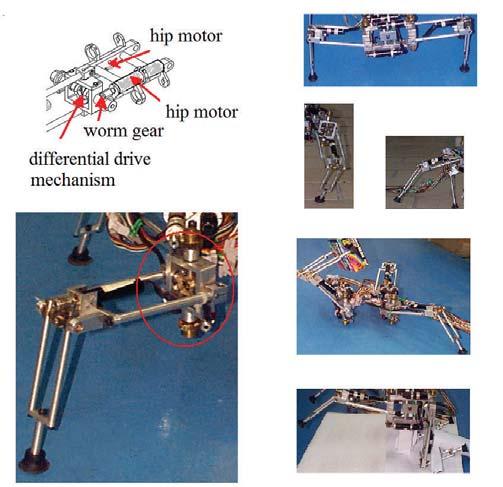
Figure 7 shows our prototypes. Figure 7A illustrates the pantograph based design – in this case the leg can move only in one plane due to the limits imposed by the pantograph linkages. The leg posture, as defined by the pantograph imposed limits, can be compared to the bent leg of a human. This design was applied in four-legged machines. Another approach uses a leg with two degrees of freedom, where the motors directly actuate the joint rotation (Figure 7B) [23]. It is the most common and the simplest solution, especially when servomotors are used. This design was also applied in a four-legged machine. In the rest position the leg assumes a more upright posture than in the first case. It better resembles the regular human leg posture. The leg moves in one plane. The last design (Figure 7C) has only two hip motors without the connecting link. In this case the leg-end moves in 3D space, howe-
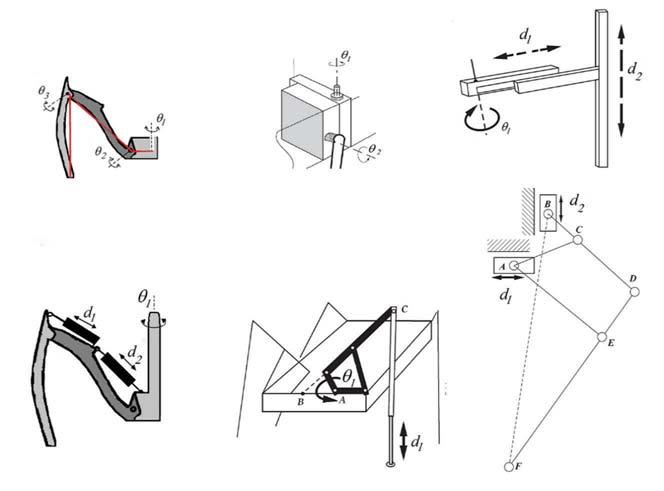
ver not every point can be reached. This design is the simplest possible, and it is commonly used in simple hexapods – we used it too. Such structures, due to the use of inexpensive servomotors are cheap. However the change of posture is limited. In the two first cases the leg posture can be only slightly adjusted by changing the flexion in the hip and knee joints. In the last case such change is not possible. This resembles the single segmented parapodia of some pseudocoelomates [21].
As it was already mentioned, a human leg (Figure 3) can be represented as a 4DOF structure, however even in simple bipeds more active joints are usually used. Such prototypes are developed for the investigation of motion synthesis or to take part in robotic competitions (such as football games, sumo wrestling etc.) therefore more degrees of freedom assure better mobility.
Figure 8A presents a leg with six active degrees of freedom: three in the hip joint, one in the knee and two in the ankle joint. The robot shown in the photograph was designed to investigate motion synthesis using the concept of biological Central Pattern Generator [22].
Figure 8B presents small humanoids developed for robotic competitions (students’ work). The humanoids have 19DOF, in that 6DOF in each leg (2 in the ankle joint, 1 in the knee joint and 3 in the hip joint in each leg). Other DOFs are responsible for upper trunk rotation (1DOF), for the sway of the upper trunk (2DOF) and for the upper limbs motion (2DOF each) what makes 7DOF toge-
Fig. 6. Leg design with differential drive mechanism (designer J.J. Heng): schematic view, photograph of the leg (circle indicates the hip joint) and the views of the leg in different postures
Rys. 6. Konstrukcja nogi z mechanizmem różnicowym (projektant J.J. Heng): widok schematyczny, zdjęcie (okręgiem zaznaczono staw biodrowy, widoki różnych postur przyjmowanych przez nogę
A B C D E F
30 Transforming Biological Patterns into Robot Concepts POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 7. Przykłady prostych konstrukcji, (A) noga z pantografem zastosowana w maszynie czworonożnej (praca studencka), (B) noga
dwoma przegubami obrotowymi zastosowana w maszynie czworonożnej (projektant M.Trojnacki), (C) noga jednosegmentowa zastosowana w maszynie sześcionożnej (praca studenta)
actuated pulley for lifting robot to bipedal posture
3DOF hip joint
actuated wheel
ther. Such robots are used in our research on the methods of motion synthesis, taking into account the whole body dynamics [17, 27].
For completeness of our considerations it must be added that all four postures, observed in the animal world, i.e. insect, reptile, amphibian and vertebrate type, are used in contemporary walking machines. The machines can move maintaining static or dynamic stability. The dynamic stability is often supported by different kinds of compliance, what will be discussed in the next section.

This subsection presents the concepts of biologically inspired robots elaborated under our supervision. These projects were developed after studying animal body structures and their motion principles. Figure 9 shows the robot transformer for transporting goods. The robot takes the four-legged posture when walking on undulating terrain (top). The robot uses the wheels for locomotion on a smooth surface (bottom left) and assumes the posture of a human for bipedal walking while carrying loads using the hands (bottom right).
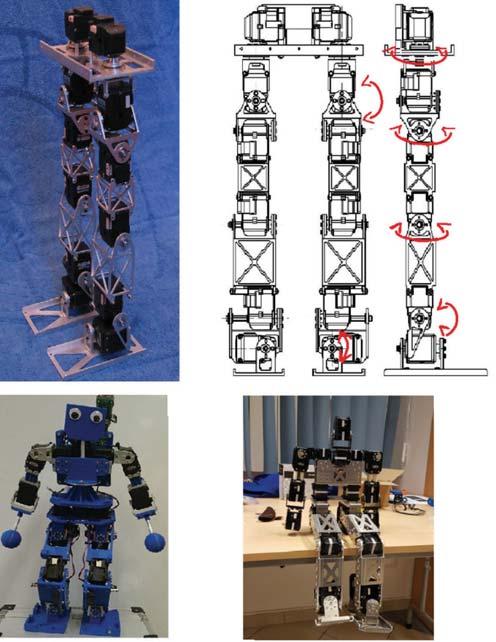
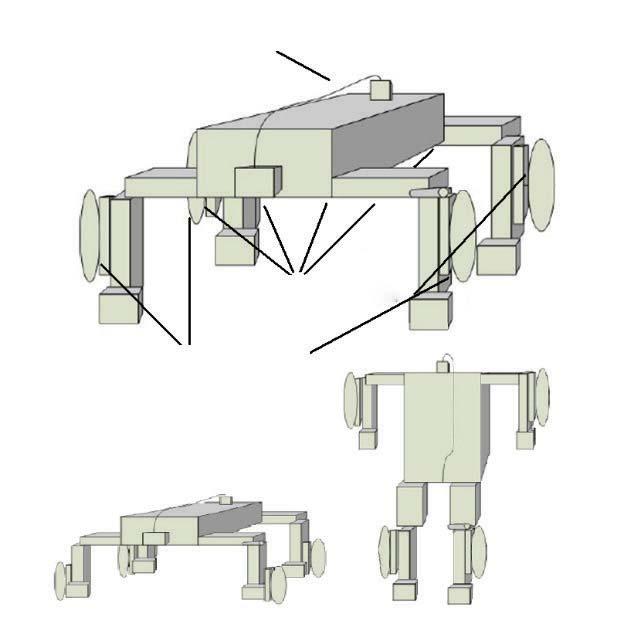
Robot shown in Figure 10 was inspired by a grasshopper and a kangaroo rat. It is a small, lightweight robot dedicated
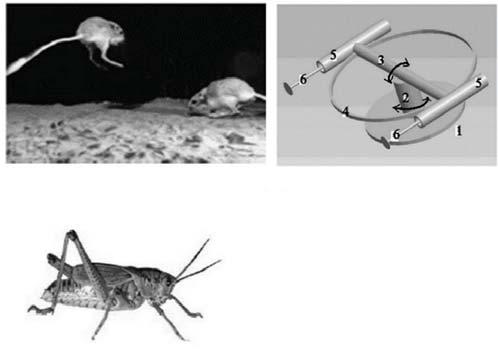
kangaroo rat
1. base
2. revolute attachement for changing the jump direction
3. revolute attachment for changing the range and height of jump
4. ring (can be used for paraschute mounting)
5. cylinder with compressed air
6.
Fig. 9. Robot transformer Rys. 9. Robot transformer
Fig. 7. Examples of simple designs, (A) leg with a pantograph mechanism applied in a four-legged machine (student’s work), (B) leg with two revolute joints applied in a four-legged machine (designer M. Trojnacki), (C) one-segment leg applied in a six-legged machine (student’s work)
A B C
z
Fig. 10. Robot inspired by jumping animals Rys. 10. Koncepcja robota inspirowany zwierzętami skaczącymi
jet piston grasshopper
A B
Fig. 8. Bipeds, (A) view of the robot and leg design with 6 active DOF (designer P.Kryczka), (B) photographs of a humanoid Rys. 8. Roboty dwunożne, (A) widok robota oraz projekt nogi o 6 aktywnych stopniach swobody (projektant P.Kryczka), (B) zdjęcia robotów humanoidalnych
31
to exploration. Up down rotation (3) of the upper ring is used to control the pitch and range of the jump, sideways rotation (2) influences the jump direction. Relatively heavier base (1) provides good landing support. The motion is obtained by a quick release of the pistons (6) in the cylinders (5).
Robot inspired by scorpion (Figure 11) was proposed to search areas of natural disasters. Robot should be able to
dig through the rubble and explore underground passages. Its trunk can bend, which increases its mobility.
An interesting concept of a worm-inspired (Figure 12A) cave climber robot was proposed for exploration of rocks and caves. The robot consists of elongated segments connected by revolute joints (Figure 12B). These joints provide adaptation to the shape of the terrain. Both ends of the robots
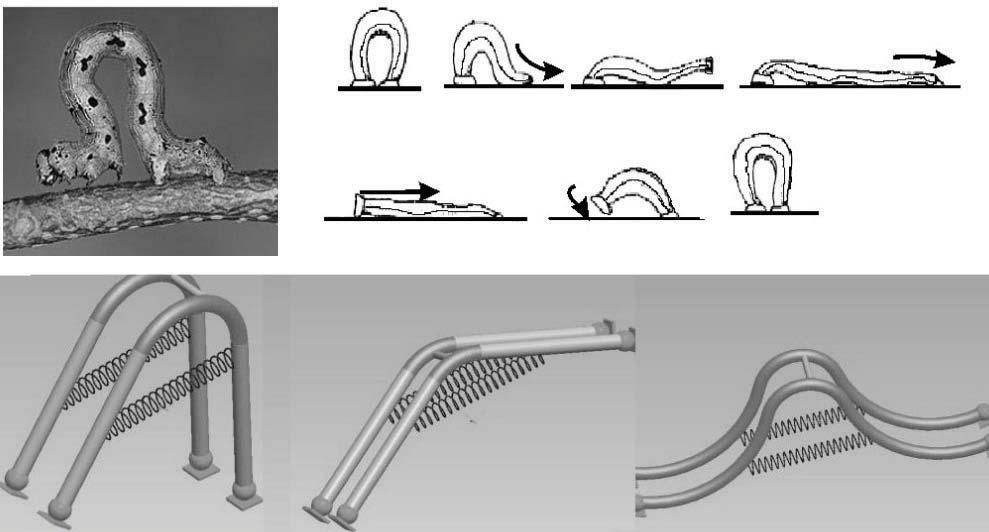
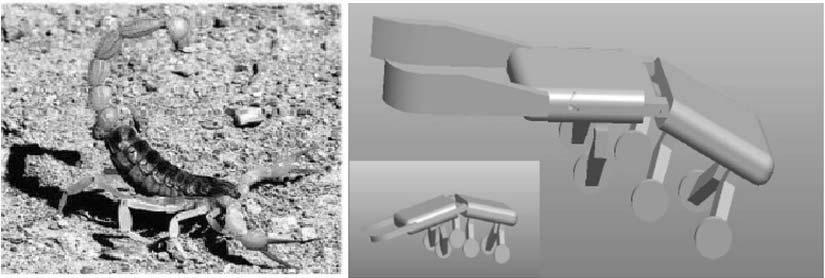
have heads containing a battery and control units. Moreover, four cameras mounted in the heads are used to explore the surrounding. Attachment to the ground is provided by the hooks (spikes) sliding out of the heads. The hooks are released by ejecting a spring and retracted with the help of an electromagnet (Figure 12C). The heads alternately attach to the wall and the robot applies peristaltic motion appropriately elongating and shortening the body segments just like a worm.
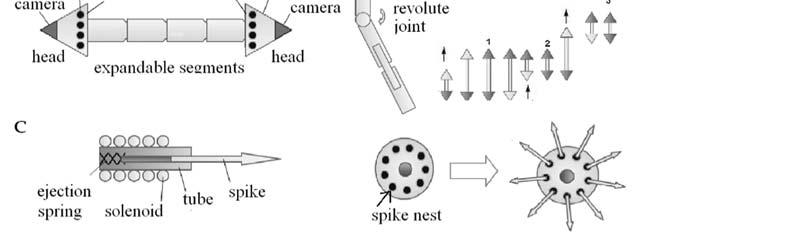
Another idea is a crawling robot that moves like an inchworm. Both ends of the inchworm body have suction cups. The worm attaches the back sucker to the ground and moves the body forward. The front sucker is then attached to the ground, the rear sucker is released and the worm pulls the body to the front sucker (Figure 13A). The same motion scheme was applied in a robot that uses under-pressure to attach accordingly its ends to the ground whereas the springs push the body forward (Figure 13B).
A simple robot that moves silently along the ropes, just like a spider, has been proposed for non-invasive eavesdropping from the top (Figure 14). It is worth mentioning that similar solutions are already used for film cameras.
The body and leg compliance are both instrumental in achieving efficient locomotion [4, 12]. In biology compliance is produced in many ways.
Compliance due to reshaping of the body is assisted by compliance due to changing the intrinsic mechanical properties of the body parts. It is interchangeable. In some animals the locomotion is executed by only reshaping body, as is the case with the soft-bodied animals. To this kind belong: −acoelomates, having triploblastic body plan with three primary embryonic cell layers and body filled with liquid,
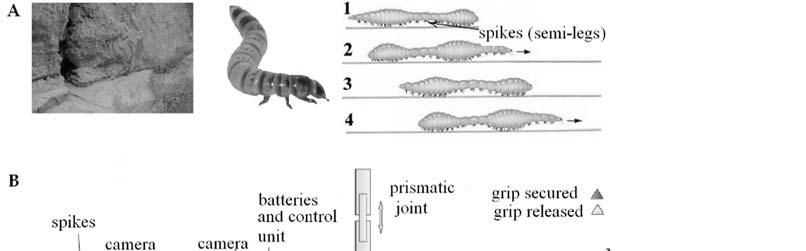 Fig. 12. Cave climber, (A) the inspiration, (B) the concept, (C) the robot heads Rys. 12. Wspinacz jaskiniowy, (A) inspiracja biologiczna, (B) koncepcja projektowa, (C) głowice robota
Fig. 11. Robot scorpion Rys. 11. Robot skorpion
Fig. 12. Cave climber, (A) the inspiration, (B) the concept, (C) the robot heads Rys. 12. Wspinacz jaskiniowy, (A) inspiracja biologiczna, (B) koncepcja projektowa, (C) głowice robota
Fig. 11. Robot scorpion Rys. 11. Robot skorpion
A B 1 2 3 4 5 6 7
Fig. 13. Robot worm, (A) the inspiration, (B) the concept Rys. 13. Robot robak, (A) inspiracja biologiczna, (B) koncepcja projektowa
32 Transforming Biological Patterns into Robot Concepts POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
−pseudocoelomates, with body musculature limited to longitudinally oriented muscles, −and some coelomates. In soft bodied animals the fluid-filled body cavity acts as a hydrostatic skeleton resisting the outside pressure and the influence of gravity.
The muscles work as flexible actuators. Those animals can maintain a different body shape, and are very versatile in reshaping the body for the purpose of displacement. In other
animals (legged coelomates) with exoskeletons or skeletons, the reshaping of the body is limited by the rigidity of the skeleton or exoskeleton. In vertebrates possession of a well-developed skeleton, the vertebral column and the controlled leg flexion and extension, produces compliance. Moreover, the mechanical properties of the feet, in some groups of animals, add to compliance too.
Biological observations show that not only repositioning of the joints, but also the leg posture influences locomotion. In unguligrade (walking on hoofs) animals the posture is characterized by significant knee flexion, and ankle joint is almost not deflected (joint angle stays close to 180°, Figure 15A). In this case during locomotion the knee angle changes in a broad range. In digitigrade (toe walking) animals the knee flexion while standing is smaller, but the ankle flexion is larger (i.e. the ankle angle is smaller than 180°, Figure 15B). In this case the take-off impulse and impact absorption are achieved by mutual adjustments of positions of both of those joints. In plantigrade (sole walking) animals the leg stays almost upright, the knee joint is not flexed, and the ankle keeps the foot at a right angle to the leg (Figure 15C).
Repositioning of the ankle joint helps the feet to adjust to the ground for smooth take-off and landing (Figure 16A). In plantigrade animals the foot, besides helping in postural adjustments, also plays an important role in locomotion. Compliant contact between the ground and the foot is assured by the foot arch (Figure 16B) [16]. The foot arch provides vertical compliance, flattening under vertical load and arching upwards when the load decreases [5]. Moreover, the arch bends along its longitudinal axis absorbing the heel or toe impact and relaxes helping to raise the foot (Figure 16C).
In this Section we focus on some forms of compliance. Compliance is the reciprocal of stiffness. It is defined as the measure of the ability of a structure to exhibit a deformation due to the action of external forces [37]. Compliant mechanisms are mechanisms, whose principle of operation is based on deformability.
The current research trend is to design compliant bodies and legs of walking machines. Compliance is caused by compliant actuators, links and joints, usually due to the use of soft materials [31, 32]. Compliant actuation can be provided by artificial muscles [7], or by variable stiffness actuators [2]. The combination of soft-body with pneumatic actuation allows to reshape the body in such a way that locomotion results [33]. Such solutions closely resemble those exhibited by biological systems [6]. However, when applied in legged robots, they require rather complex control algorithms. During the support phase the leg is loaded, therefore higher joint torques are developed, and higher stiffness is required, than in the transfer phase. In the
side view grasping legs
Fig. 14. Robot spider Rys. 14. Robot pająk
revolute head with camera
Fig. 15. Leg-end postures, (A) unguligrade, (B) digitigrade, (C) plantigrade Rys. 15. Typowe postury nóg ssaków, (A) zwierzęta kopytne, (B) zwierzęta palcochodne, (C) zwierzęta stopochodne
A B C unguligrade digitigrade plantigrade
A B C
Fig. 16. Human leg, (A) repositioning of the ankle joint during walking, (B) schematic view of the foot arch, (C) work of the foot arch during walking Rys. 16. Noga człowieka, (A) rekonfiguracja stawu skokowego podczas chodu, (B) schematyczny widok łuku stopy, (C) działanie łuku stopy w czasie chodu
33
transfer phase the leg is not loaded, this results in lower joint torque, and thus lower stiffness is needed. During the support phase stiffens must prevent leg compression, when the increasing load tends to increase the joint flexion, and vice versa. In this phase the position-torque characteristics must exhibit higher stiffness, when the joints are flexed and lower stiffness when the flexion decreases.
Compliant elements or elastic materials introduce passive compliance. In this case motion control is simpler than when using active compliance, however the mechanical features of added flexible parts must be chosen very carefully, offering the required behavior in all possible configurations [8, 15]. Postural adjustment, obtained in active compliance by positioning of active joints, in this case is achieved by passive compliance. The spring and damper systems are recently often used in the legs, or in the feet of multi-legged machines and bipeds. Such elements must be selected adequately to help and not obstruct the motion dynamics. However, the simplest way is to make the whole foot of a soft or compliant material [9], or to use a soft layer as a sole. In this case the touch-down impact is absorbed, however it is difficult to obtain the take-off impulse in a similar way to the one produced by a human foot. Another solution is to produce a segmented foot with the segments connected by passive joints [14].
Presumably one of the first compliant manipulators was developed by our institute. First the anatomical structure and motions of elephant trunk were investigated (Figure 17A). The design imitated the structure of the main muscle groups
(Figure 17D). Finally, the prototype was built (Figure 17B). It was planned to mount the manipulator on a walking machine (Figure 17D) [10]. Unfortunately, the large size of the then hydraulic compressors made it impossible. Another compliant manipulator (Figure 17E – design, Figure 17F – prototype) was inspired by a human spine.
Taking into account the hints that biology provides, compliant elements can be incorporated into any part of a walking machine leg. Here the controlled flexion enables postural compliance helping the motion dynamics, what can be called stiffness control, where stiffness is understood as the measure of the ability of a structure to resist deformation due to the action of external forces.
In our early design the foot of four-legged walking machine [10] was formed out of one piece of U-shaped metal providing compliance during the support phase (Figure 18A). In later research we proposed the structure with one vertical spring located bellow the ankle joint. This design was applied in a small biped (Figure 18B) [25] and in a four-legged walking machine. Theoretical and experimental studies confirmed that such a solution adequately helps the postural stability [3, 24]. This design was simple, but had limitations. The compression of the spring located in the rear part of the foot absorbed the touch-down impact, and the spring relaxation helped to enter the double support phase, unfortunately due to the rigid front part of the foot the take-off impulse at the beginning of the transfer phase did not appear. Lateral compliance was also not present. Therefore we expanded our concept [28] propo-
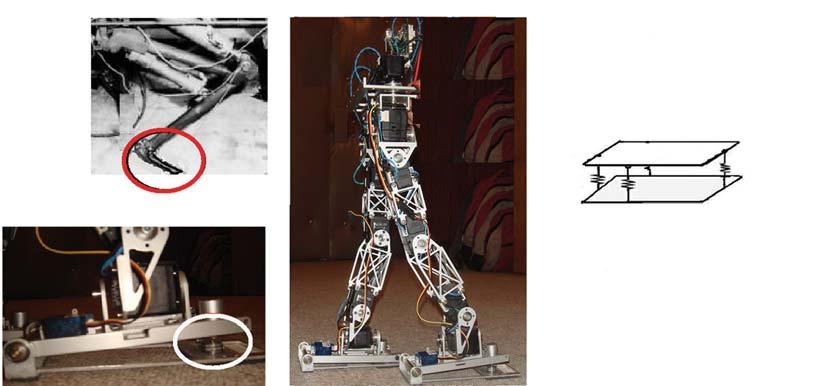
Figure 17. Compliant manipulators, (A) study drawing of elephant trunk, (B) prototype, (C) design drawing, (D) overall concept, (E) design of a spine type manipulator, (F) prototype Rys. 17. Manipulatory podatne, (A) rysunek studyjny trąby słonia, (B) prototyp, (C) rysunek projektowy, (D) ogólna koncepcja, (E) projekt manipulatora typu kręgosłup, (F) prototyp
Figure 18. Legs with compliance, (A) leg-end shaped as a bending spring, (B) foot with one linear spring and the biped with such feet, (C) general idea of the foot with four springs Rys. 18. Nogi z podatnością, (A) stopa z funkcją sprężyny, (B) stopa z jedną sprężyną liniową i robot dwunożny ze stopami zaopatrzonymi w sprężyny, (C) ogólna koncepcja stopy z czterema sprężynami
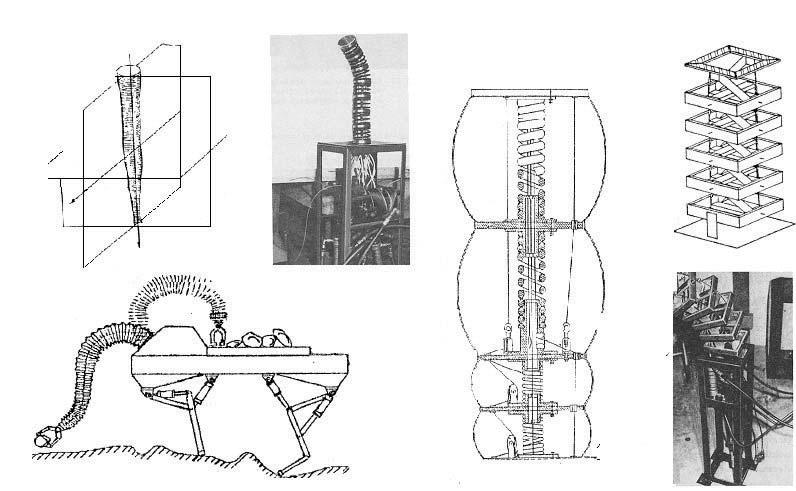
A C B left front right back
A B C E D F 34 Transforming Biological Patterns into Robot Concepts POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
sing a foot with four springs (Figure 18C). The stiffness of the springs was computed taking into account that its compression and relaxation must provide the upper body sway helping the postural stability. During walk the human trunk sways in the range of ±8 degrees in the frontal plane (side sway). Similar or smaller range can be observed in the sagittal plane. These ranges depend on personal preferences, composition of the body and walking conditions. This implies that the stiffness coefficients of an artificial foot should depend on the robot structure, its mass distribution, and expected walking conditions. When selecting the spring parameters using simulations, we considered the simplified model of a human body and a human gait. The spring compression at each instant t was calculated according to a simple formula:
Δhj(t) = Fzj(t)/kj (1)
where j Î {right; left; front; back}) spring, kj is the j-th spring stiffness coefficient, and Fzj(t) is a part of vertical leg-end force acting on the j-th spring. Taking into account the compression, the body sway was obtained by dynamic motion animation and the postural stability was checked using the ZMP criterion [27]. The anthropomorphic data of the 50-th centile man with the body height equal to 1.75 m and body mass 75 kg was used. The front spring stiffness considered as sufficient was equal to 0.05 MN/m, stiffness of the rear spring was 2 MN/m, and stiffness of left and right springs was 0.9 MN/m. Such stiffness produces a body sway in the frontal plane within the range of 1 degree and the sway in the sagittal plane (forward, backward) in the range of 3.5 degrees. The investigations confirmed that properly selected stiffness helps in maintaining the dynamic equilibrium during walking. The frontal and rear stiffness must differ, but the stiffness of the side springs must be equal.
The leg-end with a single spring was also used in four-legged walking machines. Figure 19A presents such a leg. It was used in the prototype shown in Figure 7B. As it is indicated in Figure 19A, the leg end can rotate passively around the vertical axis and around the horizontal axis of the ankle joint. The spring provides vertical compliance. The concept was investigated theoretically and tested experimentally [24]. We took into account not only the quadruped crawl, which is statically stable, but also the dynamic diagonal gait, when the body is supported by two legs located on the body diagonal. During diagonal gait a slow sway of the body around the line connecting the supporting legs, produced towards the front leg being transferred, was observed. Without compliance the sway was faster, the motion was less smooth.
As it was already mentioned, compliant elements can be incorporated into any part of the leg. Active compliance produced in the joints is a very good option. Figure 19B shows
Fig. 19. Compliant parts, (A) foot with one linear spring used in a quadruped, (B) spring loaded actuator plus its localization in the ankle joint
Rys. 19. Komponenty podatne, (A) stopa z jedną sprężyną liniową zastosowana w maszynie czteronożnej, (B) siłownik z podatnością i jego lokalizacja w stawie skokowym
a simple concept of a spring loaded actuator designed for the ankle joint of a biped robot.
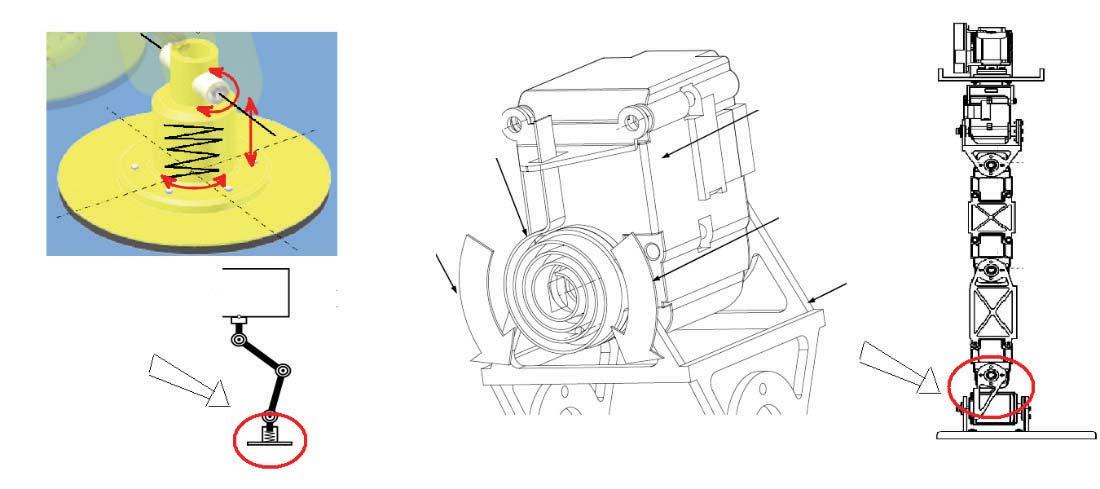
Currently the research focus is on soft-bodied robots inspired by acoelomates or plants, however classic concepts are also being modified using modern soft materials. This trend has appeared recently and is developing very quickly. The interested reader can find in [34] a roadmap showing the prospects of self-growing soft-bodied robots.
In this work we have presented the designs inspired by biology, including some forms of compliance incorporated into mechanical systems. Biological patterns have been discussed first, and next the technical solutions have been shown. It has been illustrated how biological inspirations can be transferred to the world of technology, resulting in useful solutions.
Not only legs enabling motion in unstructured terrain, but the structure and the properties of the whole body are relevant, especially when building robots performing fast movements and interacting with the environment. Artificial multi-segmented or soft-bodied structures, as well as the structures imitating the vertebral column and the bodies built of artificial muscles were and are still promising areas of research. Advances in materials science, achievements in efficient energy sources, new and miniaturized sensors are important enablers. Older ideas are now improved with the use of new technologies, and on the other hand, innovative solutions appear, such as e.g. self-growing robotic plants. It is obvious that progress depends on our creativity, but knowledge of biology and other related sciences is very important to stimulate it.
The author thanks Dr. J. Heng, Dr. P. Kryczka, M. Trojnacki and the students research group at the Faculty of Aeronautics and Applied Mechanics, Warsaw University of Technology for the years of collaboration in the area of walking machines.
1. Bruneau O., Ben Oezdou F., Compliant contact of walking robot feet. Proceedings of the 3rd ECPD International Conference on Advanced Robotics, Intelligent Automation and Active Systems, 1997.
2. Enoch A., Sutas A., Nakaoka S., Vijayakumar S., BLUE: A Bipedal Robot with Variable Stiffness and Damping, 12th IEEE-RAS Conference on Humanoid Robots, Japan 2012, DOI: 10.1109/HUMANOIDS.2012.6651564.
3. de Alba A.G., Zielińska T., Postural equilibrium criteria concerning feet properties for biped robots. “Journal of
A B preload spring torque from preload spring torque from the upper part upper part of the structure lower part
35
Automation, Mobile Robotics and Intelligent Systems”. Vol. 6, No. 1, 2012, 35–40.
4. Jung G.-P., Choi H.-C., Cho K.-J., The effect of leg compliance in multi-directional jumping of a flea-inspired mechanism. “Bioinspiration and Biomimetics, Vol. 12, No. 2, 2017, DOI: 10.1088/1748-3190/aa575a.
5. Hashimoto K., Takezaki Y., Hattori K., Kondo H., Takashima T., Lim H., Takanishi A., A Study of function of foot’s medial longitudinal arch using biped humanoid robot. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010, 2206–2211, DOI: 10.1109/IROS.2010.5650414.
6. Herman I.P., Physics of the Human Body. Springer 2016, DOI: 10.1007/978-3-319-23932-3.
7. Hosoda K., Takuma T., Nakamoto A., Design and Control of 2D Biped that can Walk and Run with Pneumatic Artificial Muscles, 6th IEEE-RAS International Conference on Humanoid Robots, 2006, 284–289, DOI: 10.1109/ICHR.2006.321398.
8. Li M., Jiang Z., Wang P., Sun L., Ge S.S., Control of a Quadruped Robot with Bionic Springy Legs in Trotting Gait. “Journal of Bionic Engineering”, Vol. 11, No. 2, 2014, 188–198, DOI: 10.1016/S1672-6529(14)60043-3.
9. Meyer F., Sprowitz A., Lungarella M., Berthouze L., Simple and low-cost compliant leg-foot system. IEEE International Conference on Intelligent Robots and Systems. 2004, Vol. 1, 515–520, DOI: 10.1109/IROS.2004.1389404.
10. Morecki A., Zielińska T., Quadruped Walking Machine –Creation of the Model of Motion. Robots and Biological Systems: Towards a New Bionics. NATO ASI Series book series, Vol. 102, 1993, 207–222.
11. Raibert M.H., Legged Robots that Balance. MIT Press, Cambridge, MA 1986.
12. Seyfarth A., Lipfert S., Rummel J., Maus M., Maykranz D., Walking and Running: How Leg Compliance Shapes the Way We Move . [In:] Modeling, Simulation and Optimization of Bipedal Walking , “Cognitive Systems Monographs”. 2013, 211–222, DOI: 10.1007/978-3-642-36368-9_17.
13. Luxman R., Zielińska T., Robot Motion Synthesis Using Ground Reaction Forces Pattern: Analysis of Walking Posture. “International Journal of Advanced Robotic Systems”, Vol. 14, 2017, DOI: /10.1177/1729881417720873.
14. Sellaouti R., Stasse O., Kajita S., Yokoi K., Kheddar A., Faster and Smoother Walking of Humanoid HRP-2 with Passive Toe Joints. IEEE International Conference on Intelligent Robots and Systems, 2006, 4909–4914, DOI: 10.1109/IROS.2006.282449.
15. Spröwitz A.J., Ajallooeian M., Tuleu A., Ijspeert A.J., Kinematic primitives for walking and trotting gaits of a quadruped robot with compliant legs. “Frontiers in Computational Neuroscience”. Vol. 8, 2014, DOI: 10.3389/fncom.2014.00027.
16. Song S., LaMontagna Ch., Collins S., Geyer H., The Effect of Foot Compliance Encoded in the Windlass Mechanism on the Energetics of Human Walking. 35th International Conference of the IEEE Engineering in Medicine and Biology Society, 2013, 3179–3182, DOI: 10.1109/EMBC.2013.6610216.
17. Szumowski M., Zielińska T., Preview Control Applied for Humanoid Robot Motion Generation, “Archives of Control Sciences”, Vol. 29(LXV), 2019, No. 1, 111–132, DOI: 10.24425/acs.2019.127526.
18. Vukobratovic M., Borovac B., Zero-Moment Point – thirty five years of its life, “International Journal of Humanoid Robotics”, Vol. 1, No. 1, 2004, 157–173, DOI: 10.1142/S0219843604000083.
19. Wilson D.M., Insect Walking. “Annual Review of Entomology”, Vol. 11, 1966, 103–122, DOI: 10.1146/annurev.en.11.010166.000535.
20. Zielińska T., Heng J., Mechanical Design of Multifunctional Quadruped. “Mechanism and Machine Theory”, Vol. 38, No. 5, 2003, 463–478, DOI: 10.1016/S0094-114X(03)00004-1.
21. Zielińska T., Biological Aspects of Walking. [In:] Walking: Biological and Technological Aspects. CISM Courses and Lectures. Pfeiffer F., Zielińska T. (eds), No. 467, 2004, 1–30, DOI: 10.1007/978-3-7091-2772-8.
22. Zielińska T., Chew C.-M., Kryczka P., Jargilo T., Robot gait synthesis using the scheme of human motion skills development. “Mechanism and Machine Theory”, Vol. 44, No. 3, 2009, 541–558, DOI: 10.1016/j.mechmachtheory.2008.09.007.
23. Zielińska T., Trojnacki M., Dynamical Approach to the Diagonal Gait Synthesis: Theory and Experiments, “Journal of Automation Mobile Robotics and Intelligent Systems”, Vol. 3, No. 2, 2009, 3–7.
24. Zielińska T, Trojnacki M., Postural Stability in Symmetrical Gaits. “Acta of Bioengineering and Biomechanics”, Vol. 11, No. 2, 2009, 57–64.
25. Zielińska T., Chmielniak A., Biologically Inspired Motion Synthesis Method of Two-Legged Robot with Compliant Feet, “Robotica”, Vol. 29, No. 7, 2011, 1049–1057, DOI: 10.1017/S0263574711000300.
26. Zielińska T., On How Compliant Feet Support Postural Stability in Two Legged Locomotion. 2015 IFToMM World Congress, Vol. 1, 2015, 51–56.
27. Zielińska T., Zimin L., Szumowski M., Ge W., Motion Planning for a Humanoid Robot with Task Dependent Constraints. [In:] Advances in Mechanism and Machine Science. IFToMM World Congress 2019, “Mechanisms and Machine Science”, Vol. 73, 2019, 1681–1690, DOI: 10.1007/978-3-030-20131-9_166.
28. Żurawska M.S., Zielińska T., Szumowski M., The Role of Compliant Elements in Two-Legged Robot’s Foot Model “Journal of Automation, Mobile Robotics and Intelligent Systems”, Vol. 9, No. 1, 2015, 68–76, DOI: 10.14313/JAMRIS_1-2015/9.
29. Zieliński C., General Robotic System Software Design Methodology. [In:] Advances in Mechanism and Machine Science. IFToMM World Congress 2019, “Mechanisms and Machine Science”, Vol. 73, 2019, 2779–2788, DOI: 10.1007/978-3-030-20131-9_275.
30. Figat M., Zieliński C., Methodology of Designing Multiagent Robot Control Systems Utilizing Hierarchical Petri Nets. 2019 IEEE International Conference on Robotics and Automation, 2019, 3363–3370, DOI: 10.1109/ICRA.2019.8794201.
31. Almubarak Y., Punnoose M., Maly N.X., Hamidi A., Tadesse Y., KryptoJelly: A Jellyfish Robot with Confined, Adjustable Pre-stress, and Easily Replaceable Shape Memory Alloy NiTi Actuators. “Smart Materials and Structures”. Vol. 29, No. 7, 2020, DOI: 10.1088/1361-665X/ab859d.
32. Renda F., Giorgio-Serchi F., Boyer F., Laschi C., Dias J., Seneviratne L., Unified Multi-soft-body Dynamic Model for Underwater Soft Robots. “The International Journal of Robotics Research”, Vol. 37, No. 6, 2018, DOI: 10.1177/0278364918769992.
33. Wang S., He L., Maiolino P., A Modular Approach to Design Multi-Channel Bistable Valves for Integrated Pneumatically-Driven Soft Robots via 3D-printing, “IEEE Robotics and Automation Letters”, Vol. 7, No. 2, 2022, 3412–3418, DOI: 10.1109/LRA.2022.3147898.
36 Transforming Biological Patterns into Robot Concepts POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Mazzolai B., Mondini A., Del Dottore E. , Margheri L., Carpi F., Suzumori K., Cianchetti M., Speck T., Smoukov S.K., Burgert I., Keplinger T., De Freitas Siqueira G., Vanneste F., Goury O., Duriez Ch., NanayakkaraT., Vanderborght B., Brancart J., Terryn S., Rich S.I, Liu R., Fukuda K., Someya T., Calisti M., Laschi C., Sun W., Wang G., Wen L., Baines R., Patiballa S.K., Kramer-Bottiglio R., Rus D., Fischer P., Simmel F.C., Lendlein A., Roadmap on Soft Robotics: Multifunctionality, Adaptability and Growth Without Borders. “Multifunctional Materials”, Vol. 5, No. 3, 2022, DOI: 10.1088/2399-7532/ac4c95.
35. Zielińska T., Control and Navigation Aspects of a Group of Walking Robots. “Robotica”, Vol. 24, No. 1, 2006, 23–29, DOI: 10.1017/S0263574705001840.

36. Zieliński C., Robotic System Design Methodology Utilising Embodied Agents. [In:] Automatic Control, Robotics and Information Processing, Eds.: P. Kulczycki, J. Korbicz, J. Kacprzyk. Series: Advances in Intelligent Systems and Computing, Vol. 296, 2021, 523–561, DOI: 10.1007/978-3-030-48587-0_17.
37. http://www.iftomm-terminology.antonkb.nl/
Biologia nie tylko dostarcza inspiracji w pracach nad maszynami kroczącymi, ale także podpowiada szczegółowe rozwiązania konstrukcyjne. Głównym celem tego artykułu jest zilustrowanie na przykładach jak wzorce biologiczne przekształcane są w konkretne rozwiązania techniczne. Przedstawiono zwięzłe informacje na temat lokomocji nożnej w świecie zwierzęcym i pokazano związki między rozwiązaniami inżynierskimi a światem biologicznym. Pokrótce opisano budowę nóg zwierząt oraz najczęściej stosowane struktury nóg maszyn kroczących z uwzględnieniem odniesień do wzorców biologicznych. Podano przykłady opracowanych przez nasz zespół inspirowanych biologicznie maszyn kroczących oraz omówiono kilka koncepcji robotów inspirowanych światem biologicznym. Ogólnym celem artykułu jest pokazanie, w jaki sposób wiedza dotycząca świata zwierzęcego inspiruje nowatorskie rozwiązania konstrukcyjne robotów przeznaczonych do zastosowań praktycznych.
ORCID: 0000-0002-8299-0727
34.
37
38 NR 3/2015 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Ela Zawidzka, Machi Zawidzki
Arm-Z to koncepcja hiperredundantnego manipulatora robotycznego składającego się z przystających modułów o jednym stopniu swobody (1-DOF) i realizującego (prawie) dowolne ruchy w przestrzeni. Zasadnicze zalety Arm-Z to: ekonomizacja (dzięki masowej produkcji identycznych elementów) oraz odporność na awarie (po pierwsze – zepsute moduły mogą być łatwo zastąpione, po drugie – nawet gdy jeden lub więcej modułów ulegnie awarii – manipulator taki może ciągle wykonywać, prawdopodobnie w stopniu ograniczonym, zakładane zadania). Podstawową wadą systemu Arm-Z jest jego nieintuicyjne, bardzo trudne sterowanie. Innymi słowy, połączenie koncepcji nietrywialnego modułu z formowaniem praktycznych konstrukcji oraz sterowanie ich rekonfiguracją (transformacją ze stanu A do B) są bardzo złożone obliczeniowo. Mimo to, prezentowane podejście jest racjonalne, zważywszy powszechną dostępność wielkich mocy obliczeniowych w kontraście z wysokimi kosztami i „delikatnością” niestandardowych rozwiązań i urządzeń. W artykule nakreślono ogólną koncepcję manipulatora Arm-Z i zaprezentowano wstępne prace zmierzające do wykonania prototypu.
1. Wprowadzenie
Biologiczne węże są doskonale przystosowane do życia w różnych środowiskach. Zawdzięczają to głównie dużej redundancji ”mechanizmu wężowego” wynikającej z nadmiarowej liczby stopni swobody [1]. W wielu przypadkach środowisk nieregularnych, inspirowane biologią roboty osiągają lepsze rezultaty niż roboty konwencjonalne: na kołach, gąsienicach czy nogach. Badania nad robotami wężowymi trwają od kilku dekad. Ten rodzaj lokomocji był analizowany już w latach 40. XX wieku [2], zaś rygorystyczny model matematyczny powstał pół wieku później. Shigeo Hirose z Tokijskiego Instytutu Technologicznego wprowadził tak zwany ”aktywny mechanizm cięgnowy” ACM (ang. active chord mechanism), a pierwszy udany lokomotor ACM III powstał w latach 1972–75. W latach 90. skonstruowano manipulator oparty na tym mechanizmie [3]. Od tej pory powstała pewna liczba robotów wężowych [4]; większość
rozwiązań przewidziano do pełzania po gruncie [5–9]; niektóre do pływania [10, 11]; zaś jeszcze mniej zarówno do pływania jak i pełzania [12, 13]. Na Rys. 1 przedstawiono ziemnowodnego robota wężowego zaprojektowanego do realizacji inspekcji oraz misji poszukiwawczo-ratunkowych w niebezpiecznych środowiskach.
Podobnie do swoich biologicznych odpowiedników, manipulatory typu wąż lub trąba słonia, dzięki specyficznemu rodzajowi ruchu mogą mieć pewne przewagi nad konwencjonalnymi manipulatorami robotycznymi. Główną zaletą jest możliwość operowania w skomplikowanych geometrycznie środowiskach, niedostępnych innymi metodami. W zależności od zadania, różnego rodzaju głowice robocze mogą być instalowane na koń-
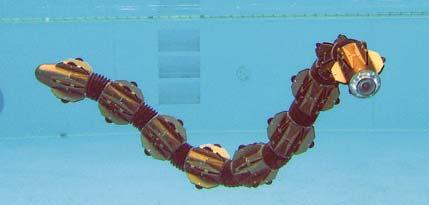 Rys. 1. Zdjęcie modularnego ziemnowodnego robota wężowego ACM-R5H z 2010 r. wykonane w Tokijskim Instytucie Technologicznym
Rys. 1. Zdjęcie modularnego ziemnowodnego robota wężowego ACM-R5H z 2010 r. wykonane w Tokijskim Instytucie Technologicznym
39 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 39–44, DOI: 10.14313/PAR_247/39
Fig. 1. Photograph of a modular amphibious snake robot ACM-R5H (Tokyo Institute of Technology)
cówkach takich manipulatorów, np. do: spawania, czyszczenia, monitorowania, etc. Generalnie sześć stopni swobody (6-DOF) pozwala na wykonanie każdego rodzaju ruchu w przestrzeni trójwymiarowej: przesunięcie wzdłuż trzech osi kartezjańskich X, Y i Z oraz trzy obroty: pochylenie, przechylenie i odchylenie. Konwencjonalne manipulatory przemysłowe mają małą liczbę stopni swobody, zwykle właśnie sześć. Co ciekawe, np. ludzkie ramię jest systemem redundantnym, gdyż ma siedem stopni swobody (7-DOF): trzy w ramieniu, jeden w łokciu i trzy w nadgarstku. Powstało kilka robotów naśladujących ludzkie ramię: robot PA-10 wykonany w zakładach Mitsubishi, lekki robot DLR (Deutsches Zentrum für Luft- und Raumfahrt), etc. Robot DEXTER wykonany we włoskiej firmie Scienzia Machinale jest przykładem manipulatora o ośmiu stopniach swobody (8-DOF). Układy o większej liczbie swobody nazywane są redundantnymi, zaś termin hiperredundantny używany jest do manipulatorów o bardzo dużej, teoretycznie nieskończonej liczbie stopni swobody [14, 15].
Te ostatnie są klasyfikowane do dwóch grup: manipulatory o sztywnych ”kręgowych” elementach, np. wężowe, ”bezkręgowe” ciągłe manipulatory imitujące ramiona ośmiornicy lub trąbę słonia. Ulepszoną metodę rozwiązywania zadania kinematyki odwrotnej dla przestrzennych robotów hiperredundantnych w oparciu o koncepcję ”krzywizny kręgosłupa” w połączeniu z analizą modalną redundancji przedstawiono w [16].
Model kinematyczny manipulatora inspirowany macką ośmiornicy, gdzie platformy Stewarta o sześciu stopniach swobody (6-DOF) stanowią ogniwa dyskretnego wielosegmentowego układu [17]. Zadanie kinematyki odwrotnej dla manipulatora będącego połączonym łańcuchem ogniw polega na określeniu pozycji wszystkich ogniw w funkcji położenia i orientacji końcówki manipulatora. Znalezienie rozwiązania kinematyki odwrotnej w postaci jawnej jest praktycznie proste, gdyż umożliwia znalezienie wszystkich możliwych rozwiązań szybciej niż metodami numerycznymi [18]. Zadanie kinematyki odwrotnej dla typowego manipulatora przemysłowego może być rozwiązane stosunkowo łatwo [19], przeto sterowanie takim manipulatorem jest względnie proste. Tymczasem manipulatory hiperredundantne to systemy wysoce nieliniowe, ich sterowanie jest bardzo trudne i zwykle wymaga stosowania metod inteligencji obliczeniowej [20–22]. Sposób rozwiązywania problemu kinematyki odwrotnej w postaci jawnej dla płaskiego manipulatora redundantnego zaproponowano w [23]. Metoda ta wykorzystuje pochodną Frécheta pewnej funkcji celu wprowadzonej do wyrugowania niewyznaczalności systemu. Niemniej model tam przedstawiony nie uwzględniał żadnych ograniczeń w zakresie ruchów manipulatora w połączeniach, co jest ogromnym uproszczeniem. Ponadto zadanie rozwiązano dla płaskiego manipulatora o zaledwie trzech stopniach swobody. W przypadku manipulatorów hiperredundantnych analityczny już opis kinematyki prostej
”eksploduje” wraz ze zwiększaniem liczby stopni swobody, nie wspominając zadania odwrotnego, które ze swojej natury jest jakościowo trudniejsze. Zatem przedstawione tam podejście nie ma praktycznego zastosowania dla manipulatorów hiperredundantnych. Podobne rozwiązania zawarto w pracach [24, 25].
W artykule [26] przedstawiono metodę analizy sterowania trajektorią planarnego manipulatora przy użyciu pseudoinwersji Moore’a-Penrose’a. Zaś w artykule [27] przedstawiono metodę rozwiązywania problemu kinematyki odwrotnej dla manipulatorów redundantnych przez wykorzystanie algorytmu opartego na kombinacji zapętlonej pseudoinwersji oraz wielokryterialnego algorytmu genetycznego.
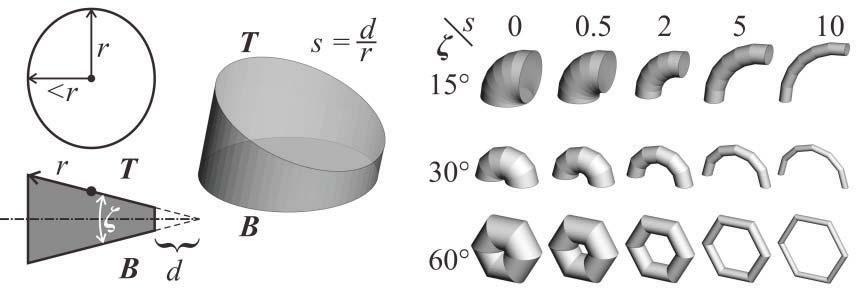
Metodę heurystyczną do przeszukiwania grafowego w celu wyznaczania bezkolizyjnej trajektorii pięcio-ogniwowego redundantnego manipulatora opisano w [28]. Inny algorytm optymalizujący ruch hiperredundantnego robota przez wyznaczenie arbitralnej ścieżki dla czoła lokomotora oraz wszystkich kolejnych ogniw, tak by unikać kolizji z danymi przeszkodami przedstawiono w [29].
Alternatywną metodę tzw. ”tunelowania”, zastosowano do omijania przeszkód przez płaski manipulator hiperredundantny [14]. W kolejnym artykule [30], ci sami autorzy przedstawili różne robotyczne mechanizmy hiperredundantne (łącznie z systemem o 30-stu stopniach swobody) wraz z możliwymi zastosowaniami. W pracy [31] sformułowano dynamikę hiperredundantnych manipulatorów jako problem mechaniki ośrodków ciągłych. Zaletą tego podejścia jest łatwe zrównoleglenie obliczeń. Więcej na temat tego typu manipulatorów można znaleźć w [31].
Idea Arm-Z w największym skrócie, opiera się na czterech przesłankach: Rura to prosty i względnie łatwy do wykonania element konstrukcyjny, szczególnie efektywny w przypadku zginania wieloosiowego. Zachodzi ono w elementach uniwersalnych, to jest takich, w których kierunek zginania nie może być z góry założony.
Konstrukcje rurowe w swojej naturze, pozwalają na tworzenie kanałów komunikacyjno-transportowych (Rys. 1). Modularność to racjonalny sposób ekonomizacji konstrukcji. Pozwala na masową produkcję stosunkowo skomplikowanych identycznych elementów przy względnie niskiej cenie. Ponadto modularność pozytywnie wpływa na odporność konstrukcji na awarie. Zużyty lub zepsuty element może być stosunkowo łatwo wymieniony przez identyczny odpowiednik.
Responsywność, adaptowalność, rekonfigurowalność, szybka instalacja i dynamiczne sterowanie to poważne wyzwania nowoczesnej architektury, budownictwa i inżynierii w wiecznie zmieniającym się środowisku. Współczesne konstrukcje
40 Prototyp
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 2. Po lewej: wizualizacja modułu Arm-Z opisywanego trzema parametrami geometrycznymi: r, d oraz ζ. Po prawej: przykłady pr ostych konfiguracji modułów dla różnych parametrów ζ i s Fig. 2. On the left – visualization of the Arm-Z module defined by three geometrical parameters: r, d and ζ. On the right – examples of simple Arm-Z configurations for various values of parameters ζ and s
ekstremalnie modularnego hiperredundantnego manipulatora Arm-Z
nie tylko muszą spełniać wymagania nośności i bezpieczeństwa, ale powinny również w sposób inteligentny dostosowywać się do zmiennego środowiska oraz zmiennych wymagań użytkowników.
Arm-Z to koncepcja jednogałęziowego trójwymiarowego manipulatora rurowego o dowolnym kształcie wykonanego z jednego rodzaju modułu. Moduł Arm-Z określa kilka parametrów: wielkość r, odsunięcie d, i kąt między powierzchniami dolną (B) i górną (T). Wygodnie jest stosować dodatkowy parametr s = d/r. Rysunek 2 ilustruje te parametry.
Zatem globalny kształt manipulatora Arm-Z zależy od: liczby modułów, geometrycznych parametrów każdego modułu oraz względnych obrotów między modułami. Połączenie między każdym modułem ma jeden stopień swobody (1-DOF) – względny obrót. Projekt połączenia o dwóch stopniach swobody (2-DOF) dla trójwymiarowych robotów hiperredundantnych, zoptymalizowanego pod kątem zwartości, wytrzymałości oraz zakresu ruchów przedstawiono w [32]. Z kolei projekt mechaniczny dla zwartego połączenia o trzech stopniach swobody (3-DOF) z przeznaczeniem dla lokomotorów wężowych przedstawiono w [33]. Sterowanie manipulatorem hiperredundantnym jest trudne i dalece nieintuicyjne. W artykule [34] zwrócono uwagę, że stosowanie technik rzeczywistości wirtualnej oraz naturalnego języka ułatwia sterowanie takimi robotami.
cji, ograniczenie do minimum liczby podzespołów oraz możliwość wytworzenia jak największej liczby części składowych przy wykorzystaniu technologii addytywnych oraz możliwość programowania kąta wychylenia ( ) każdego modułu. Uwzględniając wszystkie założenia powstał prototyp, który widoczny jest na Rys. 4.
W celu zapewnienia łatwego montażu przeniesienia napędu ogniwa Arm-Z wewnątrz każdego ogniwa, korpus został podzielony na dwie części, które skręcane są za pomocą śrub M3. Umożliwia to łatwy dostęp do zamontowania silnika krokowego wewnątrz członu składowego Arm-Z, zębatki na osi silnika krokowego oraz wypełnienie bieżni kulkami łożyskowymi. Zastosowanie kulek zmniejsza opory ruchu ogniw względem siebie (wzdłużnie i poprzecznie). Sposób ułożyskowania widoczny jest na Rys. 5.
W trakcie trwania projektu wykonano szereg atrap i wstępnych prototypów, co ilustruje Rys. 3. Głównym założeniem przy projektowaniu funkcjonalnego prototypu Arm-Z była przede wszystkim prostota konstruk-
Korpus modułu Arm-Z został zaprojektowany z myślą o wytwarzaniu na drukarkach 3D w technologii FDM/FFF. Proces produkcji polega na nanoszeniu warstwa po warstwie roztopionego materiału termoplastycznego dostarczanego najczęściej w formie drutu do głowicy [35]. Rozwiązanie to pozwala na łatwy sposób produkcji modułów, które wedle potrzeby można modyfikować (np. zmieniając kąt nachylenia pojedynczego członu). Dzięki zastosowaniu technologii przyrostowych użytkownik ma również możliwość programowania wewnętrznej struktury wytwarzanego obiektu, w której można konfigurować m.in. zmianę stopnia wypełnienia wytwarzanego modelu. Pozwala to ograniczyć docelową masę gotowego wyrobu nawet o 40 % w porównaniu z częścią wytworzoną konwencjonalnymi metodami (obróbka skrawaniem, metoda wtryskowa). Trójwymiarowy model prototypu Arm-Z uwzględnia tolerancję wymiarową rzędu 0,1 mm, która określa niedoskonałości podczas wytwarzania na maszynach w technologii FDM/FFF spowodowane m.in.
Rys. 3. Po lewej: atrapa Arm-Z ilustrująca ogólną koncepcję systemu. Po prawej – wczesny prototyp wyposażony w wewnętrzny układ przekładni umożliwiający wykonywanie prostych ruchów
Fig. 3. On the left – a photograph of a mock-up illustrating the concept of the Arm-Z manipulator. On the right – an early prototype showing the internal gear system allowing for simple movements
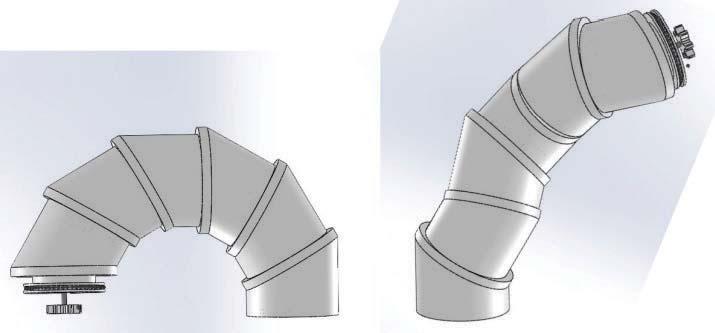

Rys. 5. Sposób ułożyskowania modułów Arm-Z (widok-przekrój), gdzie: 1 – człon A; 2 – człon B; 3 – kulki łożyskowe [opracowanie własne]
Rys. 4. Wizualizacja modułu Arm-Z. Dzięki przezroczystości pokazano: korpus modułu, połączenie śrubowe M3×15, kulki łożyskowe 4 mm, silnik krokowy typu NEMA17 oraz koło zębate [opracowanie własne]
Fig. 4. A visualization of the Arm-Z module. Transparency shows the internal structure: the casing, M3×15 bolted joint, 4 mm ball bearing, NEMA17 step-motor and custom tooth wheel
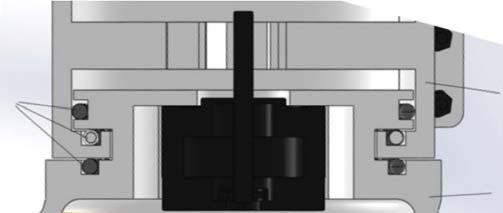
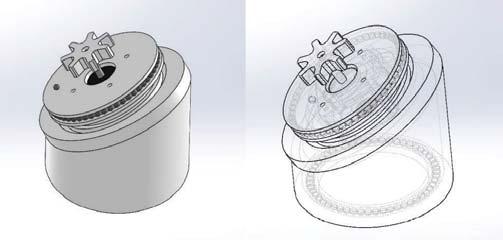
Rys. 6. Sześcioczłonowy manipulator Arm-Z z modułami o kącie nachylenia (ζ) 30° w dwóch wybranych konfiguracjach [opracowanie własne]
Fig. 6. A visualization of a six-module Arm-Z manipulator (ζ = 30°) in two configurations
3 2 1
41
Fig. 5. The bearing system of the Arm-Z module: 1 – module A, 2 – module B, 3 – ball bearing
skurczem. W ten sposób ograniczane są problemy występujące na etapie montażu fizycznego modelu.
Sterowanie poszczególnymi członami Arm-Z odbywa się za pomocą silników krokowych zainstalowanych wewnątrz każdego z ogniw, sterowanych przez układ Arduino. Moment obrotowy każdego z silników (około 0,4 Nm) oraz liczba 200 kroków na obrót w połączeniu z inteligentnym sterownikiem silnika krokowego (wyposażonego w obsługę mikrokroków) pozwala na płynne regulowanie zmiany kąta obrotu każdego z ogniw z dokładnością do jednego stopnia. Szacowana masa całkowita jednego kompletnego ogniwa to około 500 g (uwzględnia masę silnika krokowego 200 g). Sterowanie odbywa się z poziomu programu przez wywołanie odpowiednich komend języka G-CODE dla poszczególnych silników krokowych. Dodatkowym atutem prototypu Arm-Z jest możliwość budowy manipulatora przez łączenie ogniw o różnych kątach nachylenia, co zwiększa jego zastosowanie. Rysunek 6 prezentuje manipulator Arm-Z zbudowany z sześciu członów.
W artykule [36] przedstawiono wyniki prac z wykonania łącznika, będącego kołem omnikierunkowym (szwedzkim) o zmiennej sztywności, w technice druku 3D z polimeru z pamięcią kształtu SMP (ang. shape memory polymer). Pogłębiona analiza pod kątem projektu mechanicznego, kinematyki oraz weryfikacji eksperymentalnej prototypu hiperredundantnego robota cięgnowego została przedstawiona w [37]. Zaś konstrukcja lekkiego (ażurowego) manipulatora sterowanego za pomocą dielektrycznych polimerowych aktuatorów została przedstawiona w [38].
2. Gray J., The mechanism of locomotion in snakes. „Journal of Experimental Biology”, Vol. 23, No. 2, 1946, 101–120, DOI: 10.1242/jeb.23.2.101.
3. Hirose S., Biologically Inspired Robots: Snake-Like Locomotors and Manipulators. Oxford University Press, 1993.
4. Ijspeert A.J., Crespi A., Online trajectory generation in an amphibious snake robot using a lamprey-like central pattern generator model. Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA 2007), 262–268, DOI: 10.1109/ROBOT.2007.363797.
5. Chirikjian G.S., Burdick J.W., Design and Experiments with a 30 DOF Robot. [In:] Proceedings IEEE International Conference on Robotics and Automation, 1993, 113–119, DOI: 10.1109/ROBOT.1993.291862..
6. Klaassen B., Paap K.L., GMD-SNAKE2: a snake-like robot driven by wheels and a method for motion control. Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Vol. 4, 1999, 3014–3019, DOI: 10.1109/ROBOT.1999.774055.
7. Miller G., Snake robots for search and rescue, [In:] Neurotechnology for Biomimetic Robots, 2002, DOI: 10.7551/mitpress/4962.003.0023.
8. Choi H.R., Ryew S.M., Robotic system with active steering capability for internal inspection of urban gas pipelines „Mechatronics”, Vol. 12, No. 5, 2002, 713–736, DOI: 10.1016/S0957-4158(01)00022-8.
9. Tsakiris D.P., Sfakiotakis M., Menciassi A., La Spina G., Dario P., Polychaete-like undulatory robotic locomotion. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005, 3018–3023. IEEE, DOI: 10.1109/ROBOT.2005.1570573.
Prototyp wieloczłonowego manipulatora Arm-Z cechuje się prostą i zwartą konstrukcją. Programowalny, trójwymiarowy model pozwala na dowolną konfigurację członów pod względem średnicy, długości modułu czy też kąta pochylenia ( ).
Dzięki modułowej konstrukcji w łatwy sposób można zaprojektować manipulator, spełniający zadane kryteria pracy manipulatora. Koszt oraz możliwość wytworzenia większości części za pomocą drukarki 3D pozwala na szybkie prototypowanie różnych manipulatorów Arm-Z.
Uwzględniając możliwość ponownego przetopu materiału z wytworzonych wcześniej modułów przedstawiona koncepcja prototypu Arm-Z wpisuje się w gospodarkę obiegu zamkniętego, co idealnie przekłada się na dzisiejsze trendy ”no waste”.
Czas wytworzenia części przy wykorzystaniu ”desktopowych” drukarek 3D nie powinien być dłuższy niż 10 h na jeden moduł.
W dalszych krokach planowana jest budowa fizycznego modelu manipulatora, opierającego się na opisanym prototypie, w celu weryfikacji i walidacji trójwymiarowego modelu.
10. Melsaac K.A., Ostrowski J.P., A geometric approach to anguilliform locomotion: modelling of an underwater eel robot Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Vol. 4, 1999, 2843–2848, DOI: 10.1109/ROBOT.1999.774028.
11. Wilbur C., Vorus W., Cao Y., A Lamprey-Based Undulatory Vehicle. [In:] Neurotechnology for Biomimetic Robots, 2002, DOI: 10.7551/mitpress/4962.003.0024.
12. Yamada H., Development of amphibious snake-like robot ACM-R5. Proceedings of the 36th International Symposium on Robotics (ISR 2005), Tokyo, 2005, 433–440.
13. Crespi A., Badertscher A., Guignard A., Ijspeert A.J., AmphiBot I: an amphibious snake-like robot. „Robotics and Autonomous Systems”, Vol. 50, No. 4, 2005, 163–175, DOI: 10.1016/j.robot.2004.09.015.
14. Chirikjian G.S., Burdick J.W., An obstacle avoidance algorithm for hyper-redundant manipulators. Proceedings of IEEE International Conference on Robotics and Automation, 1990, 625–631, DOI: 10.1109/ROBOT.1990.126052.
15. Ning K., Wörgötter F., A novel concept for building a hyper-redundant chain robot. „IEEE Transactions on Robotics”, Vol. 25, No. 6, 2009, 1237–1248, DOI: 10.1109/TRO.2009.2032968.
Opisane badania stanowią część projektu „Arm-Z: ekstremalnie modularny hiperredundantny ekonomiczny manipulator – opracowanie metod sterowania oraz analiza efektywności” finansowanego przez Narodowe Centrum Nauki w ramach programu OPUS 17, kontrakt nr 2019/33/B/ST8/02791.
1. Zawidzki M., Nagakura T., Arm-Z: a modular virtual manipulative. [In:] H-P. Schröcker, editor, 16th International Conference on Geometry and Graphics, 2014, 75–80.
16. Fahimi F., Ashrafiuon H., Nataraj C., An improved inverse kinematic and velocity solution for spatial hyper-redundant robots. „IEEE Transactions on Robotics and Automation”, Vol. 18, No. 1, 2002, 103–107, DOI: 10.1109/70.988980.
17. Lafmejani A.S., Doroudchi A., Farivarnejad H., He X., Aukes D., Peet M.M., Marvi H., Fisher R.E., Berman S., Kinematic modeling and trajectory tracking control of an octopus-inspired hyper-redundant robot. „IEEE Robotics and Automation Letters”, Vol. 5, No. 2, 2020, 3460–3467, DOI: 10.1109/LRA.2020.2976328.
18. Siciliano B., Khatib O., Kröger T., Springer handbook of robotics, Vol. 200, Springer, 2008.
19. Murray R.M., Li Z., Sastry S.S., A mathematical introduction to robotic manipulation. CRC press, 1994.
42 Prototyp ekstremalnie modularnego hiperredundantnego manipulatora Arm-Z POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
20. Rolf M., Steil J.J., Efficient exploratory learning of inverse kinematics on a bionic elephant trunk. „IEEE Transactions on Neural Networks and Learning Systems”, Vol. 25, No. 6, 2014, 1147–1160, DOI: 10.1109/TNNLS.2013.2287890.
21. Melingui A., Escande C., Benoudjit N., Merzouki R., Mbede J.B., Qualitative approach for forward kinematic modeling of a compact bionic handling assistant trunk. „IFAC Proceedings Volumes”, Vol. 47, No. 3, 2014, 9353–9358, DOI: 10.3182/20140824-6-ZA-1003.01758.
22. Falkenhahn V., Hildebrandt A., Neumann R., Sawodny O., Dynamic control of the bionic handling assistant. „IEEE/ ASME Transactions on Mechatronics”, Vol. 22, No. 1, 2017, 6–17, DOI: 10.1109/TMECH.2016.2605820.
23. Galicki M., A closed solution to the inverse kinematics of redundant manipulators. „Mechanism and Machine Theory”, Vol. 26, No. 2, 1991, 221–226, DOI: 10.1016/0094-114X(91)90085-I.
24. Jacak W., A discrete kinematic model of robots in the Cartesian space. „IEEE Transactions on Robotics and Automation”, Vol. 5, No. 4, 1989, 435–443, DOI: 10.1109/70.88058.
25. Jacak W., Strategies of searching for collision-free manipulator motions: automata theory approach. „Robotica”, Vol. 7, No. 2, 1989, 129–138, DOI: 10.1017/S0263574700005439.
26. Machado J.A.T., Lopes A.M., A fractional perspective on the trajectory control of redundant and hyper-redundant robot manipulators. „Applied Mathematical Modelling”, Vol. 46, 2017, 716–726, DOI: 10.1016/j.apm.2016.11.005.
27. Maria da Graça Marcos, Machado J.A.T., Azevedo-Perdicoúlis T.-P., A multi-objective approach for the motion planning of redundant manipulators. „Applied Soft Computing”, Vol. 12, No. 2, 2012, 589–599, DOI: 10.1016/j.asoc.2011.11.006.
28. Galicki M., Morecki A., Finding collision-free trajectory for redundant manipulator by local information available. [In:] RoManSy 9, 1993, 61–71. Springer, DOI: 10.1007/BFb0031432.
29. Menon M.S., Ravi V.C., Ghosal A., Trajectory planning and obstacle avoidance for hyper-redundant serial robots „Journal of Mechanisms and Robotics”, Vol. 9, No. 4, 2017, DOI: 10.1115/1.4036571.
30. Chirikjian G.S., Burdick J.W., Hyper-redundant robot mechanisms and their applications. Proceedings IROS ‚91: IEEE/ RSJ International Workshop on Intelligent Robots and Systems ‚91, DOI: 10.1109/IROS.1991.174447.
31. Chirikjian G.S., Burdick J.W., A hyper-redundant manipulator. „IEEE Robotics & Automation Magazine”, Vol. 1, No. 4, 1994, 22–29, DOI: 10.1109/100.388263.
32. Shammas E., Wolf A., Brown H.B., Choset H., New joint design for three-dimensional hyper redundant robots. Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Vol. 4, 2003, 3594–3599, DOI: 10.1109/IROS.2003.1249713.
33. Shammas E., Wolf A., Choset H., Three degrees-of-freedom joint for spatial hyper-redundant robots. „Mechanism and Machine Theory”, Vol. 41, No. 2, 2006, 170–190, DOI: 10.1016/j.mechmachtheory.2005.04.008.
34. Martín-Barrio A., Roldàn J.J., Terrile S., del Cerro J., Barrientos A., Application of immersive technologies and natural language to hyper-redundant robot teleoperation. „Virtual Reality”, Vol. 24, No. 3, 2020, 541–555, DOI: 10.1007/s10055-019-00414-9.
35. Cader M., Kiński W., Effect of changing the parameters of the Multi Jet Fusion (MJF) process on the spatial objects produced. „Problemy Mechatroniki: uzbrojenie, lotnictwo, inżynieria bezpieczeństwa”, Vol. 11, Nr 4, 2020, 61–72, DOI: 10.5604/01.3001.0014.5644.
36. Yang Y., Chen Y., Li Y., Chen M.Z., 3D printing of variable stiffness hyper-redundant robotic arm. 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, 3871–3877, DOI: 10.1109/ICRA.2016.7487575.
37. Tang L., Wang J., Zheng Y., Gu G., Zhu L., Zhu X., Design of a cable-driven hyper-redundant robot with experimental validation. „International Journal of Advanced Robotic Systems”, Vol. 14, No. 5, 2017, DOI: 10.1177/1729881417734458.
38. Wingert A., Lichter M.D., Dubowsky S., Hafez M., Hyper-redundant robot manipulators actuated by optimized binary-dielectric polymers. [In:] Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD), Vol. 4695, 2002, 415–423, DOI: 10.1117/12.475189.
Arm-Z is a concept of a robotic manipulator comprised of linearly joined congruent modules with possibility of relative twist (1 DOF). The advantages of Arm-Z are: economization (mass-production) and robustness (modules which failed can be replaced, also if some fail the system can perform certain tasks). Non-intuitive and difficult control are the disadvantages of Arm-Z. In other words, the combination of non-trivial module shape with forming of practical modular structures and their control (from state A to B) is computationally expensive. However, due to availability of modern computational power, proposed here approach is rational and competitive, especially considering the high cost and sensitivity of non-standard solutions. This paper outlines the general concept of Arm-Z manipulator and presents preliminary work towards making a proof-of-the-concept prototype.
Keywords
43
ORCID: 0000-0003-1243-9355

ORCID: 0000-0001-8695-4400
ORCID: 0000-0003-4973-7604


44 Prototyp ekstremalnie modularnego
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
hiperredundantnego manipulatora Arm-Z
Przedstawiono jednolity sposób doboru nastaw PID dla regulatora kursu i regulatora śledzenia ścieżki, które występują w kaskadowym układzie autopilota statku. Jednolitość projektowania jest możliwa dzięki temu, że w odniesieniu do każdego regulatora sterowany przez niego obiekt wygląda jak integrator ze stałą czasową. W przypadku regulatora kursu jest to znany model Nomoto. Dzięki eliminacji przez regulator stałej czasowej obiektu, układ zamknięty staje się układem 2-go rzędu. Założono, że układ ten ma mieć podwójną stałą czasową różniącą się w zadanym stosunku od stałej czasowej obiektu. Pokazano, że tak zaprojektowany regulator kursu lepiej tłumi zakłócenia środowiskowe niż regulator z wzorcowymi nastawami.
1. Wprowadzenie
W podróży statku morskiego można wyróżnić trzy główne fazy różniące się sposobem sterowania [1–3]: −manewry w porcie i na wodach ograniczonych, ze sterowaniem ręcznym, żegluga przybrzeżna, z kursem statku utrzymywanym przez autopilota, żegluga na wodach otwartych (oceaniczna), gdzie autopilot przeprowadza statek po trasie wyznaczonej przez szereg punktów nawigacyjnych.
Powszechnie stosowanym algorytmem sterowania kursem jest PID z nastawami wyznaczonymi dla prostego opisu dynamiki statku, znanego jako model Nomoto. Ma on postać integratora ze stałą czasową i jest tworzony na podstawie prób morskich. Śledzenie prostoliniowego fragmentu trasy, inaczej ścieżki, można realizować w układzie kaskadowym [4, 5] z regulatorem nadrzędnym (także PID) wyznaczającym zadany kurs dla regulatora podrzędnego.
Parametry modelu Nomoto, a więc i nastawy PID, można uzależnić od prędkości statku otrzymując adaptacyjny regulator kursu. Trudnością jest jednak uzależnienie ich od stopnia załadunku, zmiennego dla wielu typów statków. Rozwiązaniem może być tutaj rozmyty regulator PID, w którym na podstawie odchyłki kursu i prędkości jej zmiany koryguje się co pewien czas nastawy według wcześniej przygotowanych reguł [6, 7].
Wzorcowe nastawy regulatora PID sterującego kursem podane są w książkach Fossena [1, 2], fundamentalnych dla automatyki okrętowej. Zakłada się tam, że układ zamknięty, na razie tylko z regulatorem PD, ma mieć transmitancję 2-go rzędu o częstotliwości naturalnej w n i współczynniku tłumienia x w przedziale [0.8, 1]. Składową I dołączaną następnie do PD określa wzór heurystyczny (pochodzący od Balchena). Z nastaw wzorcowych korzysta wielu autorów, np. [7–9]. Alternatywą dla tych nastaw mogą być nastawy podane w [10], sformułowane przy założeniu podwójnej stałej czasowej układu zamkniętego (tłumienie krytyczne), która w zadanym stosunku ma różnić się od stałej czasowej statku. Dzięki eliminacji przez regulator tej stałej czasowej, układ zamknięty staje się 2-go rzędu, ale bez sięgania po zależność heurystyczną. Metodę tę zastosowano również do syntezy serwomechanizmu napięciowego [11] ze względu na identyczny opis dynamiki obiektu.
Tutaj wracamy do uzasadnienia nastaw z [10] dokonując jednocześnie porównania z nastawami wzorcowymi dla odpowiedzi na zakłócenia środowiskowe (wiatr, prąd). Okazuje się, że pod tym względem zaproponowane nastawy wyglądają korzystniej. Drugim rezultatem są nastawy regulatora śledzenia ścieżki (nadrzędnego), których nie napotkano w dostępnej literaturze. Pokazano, że nastawy regulatora śledzenia można dobrać według analogicznych zależności jak nastawy regulatora kursu, ponieważ modele sterowanych obiektów są tego samego typu (integrator ze stałą czasową). W sumie otrzymano jednolity sposób doboru nastaw PID dla autopilota przewidzianego dla żeglugi przybrzeżnej i żeglugi na wodach otwartych.
Należy jednak dodać, że powszechnie stosowanym, prostszym niż regulacja kaskadowa, jest algorytm śledzenia „na namiar” LoS (ang. Line of Sight) [12–14]. Polega on na cyklicznym korygowaniu kursu na końcowy punkt ścieżki, jeśli zakłócenia środowiskowe powo dują od niej odchylenia. Dokładność śledzenia metodą LoS, będącej faktycznie sterowaniem w układzie otwartym pomiędzy korektami kursu, ustępuje jednak regulacji kaskadowej.
45 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 45–50, DOI: 10.14313/PAR_247/45
Wśród komercyjnych autopilotów statków pierwszą grupę stanowią proste regulatory kursu, których nastawy dobierane są ręcznie [15]. Do drugiej grupy należą autopiloty wyposażone w GPS [16], które mogą kierować statek do wybranego punktu (ang. Goto Waypoint) lub przechwytują ścieżkę (ang. Goto Track). Trzecią grupę stanowią zaawansowane rozwiązania z wbudowanym trybem śledzenia ścieżki oraz możliwością planowania trasy podróży na urządzeniu ECDIS (ang. Electronic Chart Display Information System). Producenci autopilotów nie podają jednak, według jakich zależności dobierane są nastawy.
Prostym opisem dynamiki statku dla sterowania kursem j za pomocą wychylenia steru d jest model Nomoto [1–3]
czyli integrator ze stałą czasową T. Współczynnik wzmocnienia k jest wprost proporcjonalny do prędkości statku V, a stała czasowa T – odwrotnie. Początkowe wartości k0, T0 są znane na podstawie prób morskich wykonywanych przy prędkości V0
Rozważany jest układ regulacji kursu pokazany na rys. 1, w którym d reprezentuje zakłócenie środowiskowe, tzn. wiatr, fale lub prąd morski. Standardowy regulator PID ma postać
Wynikają z niego wprost T1 i k p w zależności od Tcl, czyli
Ponieważ Tcl = T/r według (3), więc łącząc wzory (2), (6) z warunkiem T2 = T otrzymuje się finalne nastawy k p, Ti, Td podane w tab. 1. Układ z rys. 1 będzie miał postać (3) dla filtru F o transmitancji 1/(T1s + 1) z T1 = 2T/r
Tab. 1. Nastawy regulatora PID kursu statku
Tab. 1. Setting of the ship heading PID controller k p Ti Td r r T 2 + 2 2 + r T
W pracy [11] można znaleźć odpowiedniki wzorów z tab. 1, gdy parametrem projektowym jest, jak wspomniano, czas regulacji t s. Ponieważ w przypadku transmitancji 2-go rzędu (3) mamy t s = 6Tcl, więc r = 6T/t s oraz T1 = 2T/r = t s/3. Stąd np. pierwszy wzór z tab. 1 można przekształcić do postaci .
W praktycznej realizacji algorytmu PID składowa różniczkująca jest uzupełniana filtrem o stałej czasowej Td/D, czyli ma postać
z symbolem N stosowanym w środowisku MATLAB. Można sprawdzić, że dla 4 ≥ i nastaw z tab. 1 odpowiedź skokowa układu z filtrem różniczkowania praktycznie nie różni się od odpowiedzi bez tego filtru.
Rys. 1. Schemat układu regulacji kursu Fig. 1. Diagram of the heading control system
Filtr F eliminuje przeregulowanie. Zaadaptowany z [10] tryb projektowania polega na takim doborze nastaw regulatora PID oraz filtru F, aby transmitancja układu zamkniętego miała postać
(3)
Dzielnik redukcyjny r jest parametrem projektowym. Jeżeli r > 1, to stała czasowa Tcl układu zamkniętego ma być r-krotnie mniejsza od stałej czasowej statku T. Podobny problem, choć na gruncie całkiem innych zastosowań, był rozważany w [11], ale z czasem regulacji t s jako parametrem projektowym.
Eliminacja stałej czasowej T przez podstawienie T2 = T w regulatorze (2) daje transmitancję układu otwartego w postaci
(4)
Odpowiadającą jej transmitancję układu zamkniętego przekształcamy tak, aby ostatnim elementem mianownika było 1. Mianownik ten powinien być taki sam jak mianownik w (3), czemu odpowiada równanie
W fundamentalnych książkach Fossena [1, 2] jako transmitancję układu zamkniętego przyjęto , 1] [0,8, ∈ ξ (8)
z parametrami projektowymi , nω ξ Projektowany jest tam najpierw regulator PD, do którego składową i dobiera się heurystycznie. Podane w [1, 2] nastawy, nazywane tutaj wzorcowymi, mają postać
Porównanie przebiegów regulacyjnych dla takich nastaw z nastawami według tab.1 wymaga ujednolicenia parametrów projektowych. Stała czasowa Tcl występująca w (3) odpowiada odwrotności modułu części rzeczywistej pierwiastka mianownika w (8), czyli
,
V
V k
0 0 0 0
V
T T V
k
, = = , (1)
(2) (5)
.
(6)
d d d d T D N s N s T s D T s T = + = + , 1 ) / (1 1 ) / ( (7)
(9)
. (10)
, .
.
46 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Ponieważ Tcl = T/r, więc , co po podstawieniu do (9) daje nastawy wzorcowe w postaci
Ponieważ w [1, 2] nie podano wskazówek odnośnie doboru filtru F (rys. 1), więc do porównania powinny służyć odpowiedzi zakłóceniowe. Na rys. 2 pokazano takie odpowiedzi dla wzorcowych nastaw (11) oraz nastaw z tab.1 dla znormalizowanych danych k = 1, T = 1 oraz r = 2 i 0,8 = ξ lub 1. Jak widać, odpowiedzi zakłóceniowe przemawiają na korzyść nastaw z tab.1. Można jednak sprawdzić, że jeśli w każdym z tych przypadków zastosować identyczny filtr , to odpowiedzi na skok wielkości zadanej refϕ są bardzo zbliżone (2,5 % przeregulowania dla 0,8 = ξ ).
W celu oceny dynamiki obiektu sterowanego przez PIDT załóżmy, że regulator ten znajduje się w trybie pracy ręcznej, a jego wyjście przestawiono skokowo na wartość . TΔϕ Regulator PIDH zacznie wtedy zmieniać kurs, skutkiem czego odchyłka XTE zacznie narastać, mniej więcej tak, jak to pokazano na rys. 4. Prawą prostoliniową część odpowiedzi skokowej można zapisać jako ) ( T T T t V Δϕ z wartością TT odczytaną wprost z wykresu.
Sterowanie statkiem wzdłuż ścieżek łączących kolejne punkty planu podróży jest przeważnie realizowane za pomocą algorytmu LoS (ang. Line of Sight) [12–14]. W tym celu w autopilocie statku znajdującego się na początku ścieżki ustawia się zadany kurs refϕ na jej punkt końcowy. Jeżeli nie ma wiatru lub prądu, to regulator kursu doprowadzi statek po pewnym czasie do punktu końcowego. Jednak pojawienie się zakłóceń znosi statek ze ścieżki zmieniając namiar na punkt końcowy. Wymaga to wówczas odpowiedniej korekty refϕ . Po parokrotnych korektach dochodzi się finalnie do punktu końcowego odcinka, ale po trajektorii będącej płytszym lub głębszym łukiem, którego cięciwą jest pierwotna ścieżka. Należy oczekiwać, że regulator śledzenia ścieżki na podstawie sygnału GPS określającego aktualną pozycję będzie w stanie poprowadzić statek po cięciwie-ścieżce mimo wiatru lub prądu.
Schemat proponowanego kaskadowego układu śledzenia ścieżki pokazano na rys. 3 (por. poz. [10])
PIDT jest regulatorem śledzenia (ang. track), PIDH regulatorem kursu (ang. heading), zaś blok V/s przekształca odchyłkę kursu refϕ ϕ na odchylenie od ścieżki XTE (ang. Cross Track Error), zależne od prędkości V [1, 2]. Faktyczne odchylenie XTE jest wyznaczane przez układ nawigacyjny statku. Problem projektowy polega na dobraniu nastaw regulatora PIDT
Rys. 4. Odpowiedź układu regulacji kursu z wyjściem XTE Fig. 4. Heading control system response with XTE output
Nietrudno spostrzec, że odpowiedź z rys. 4 odpowiada transmitancji integratora o stałej czasowej TT, tzn.
1) ( ) ( ) ( + = Δ s T s V s s XTE T Tϕ . (12)
Jest to transmitancja tego samego typu co w (1), dzięki czemu można zastosować dotychczasowe wyniki projektowania po zmianie oznaczeń.
Niech więc (13)
będzie stałą czasową kaskadowego układu zamkniętego z odpowiednio dobranym dzielnikiem rT. Nastawy regulatora PIDT podane w tab. 2 aktualizują tab. 1 odpowiednio do (12) i (13).
Zwróćmy uwagę, że powyższa analiza ogranicza się do wymagania, aby regulator kursu PIDH działał poprawnie, nie określając bliżej jego nastaw. W szczególności mogłyby to być wzorcowe nastawy (9) lub inne gwarantujące stabilną pracę. Jednak, gdy regulator PIDH jest nastawiony według tab. 1, to transmitancją układu regulacji kursu jest (3) i wtedy między TT w 1/(TT s + 1) a Tcl w (3) zachodzi związek (14)
Tab. 2. Nastawy regulatora śledzenia PIDT wyznaczone z odpowiedzi skokowej Tab. 2. PIDT tracking controller settings derived from the reference response
.
(11)
Rys. 2. Odpowiedzi zakłóceniowe dla nastaw wzorcowych [1, 2] i nastaw z tab.1
Fig. 2. Disturbance responses for reference settings [1, 2] and settings from Table 1
Rys. 3. Kaskadowy układ śledzenia ścieżki o kursie refϕ
Fig. 3. Cascade tracking system with path course refϕ
k p Ti Td T T T r r T 2 + 2 2 + T T r T
47
Uwzględniono to w tab. 2 otrzymując nastawy regulatora
PIDT podane w tab. 3.
Tab. 3. Nastawy regulatora PIDT wyznaczone z modelu Nomoto
Tab. 3. PIDT tracking controller settings derived from the Nomoto model

nikami pewnych planów podróży. Zakłada się, że statek może wyjść z portu tylko w kierunku północnym, zaś autopilot powinien możliwie szybko wprowadzić go na ścieżkę. Każdą ścieżkę określa orientacja geograficzna, np. NE (ang. North-East), oraz położenie względem portu. Pierwszy znak orientacji wskazuje, w którym z dwu możliwych kierunków (przeciwnych) statek ma płynąć. Mamy więc odpowiednio do rysunków:
a) NE, ścieżka wychodząca z portu,
b) NW, ścieżka przebiega powyżej portu,
c) SW, jw.
Jak widać, nie jest tu potrzebna dodatkowa odpowiedź skokowa (rys. 4), ale wystarczy stała czasowa statku T wyznaczona pierwotnie na podstawie prób morskich.
Na rys. 5 pokazano przebieg odchyłki XTE przy skokowej zmianie kąta refϕ (nowa ścieżka, lewa część) oraz pojawieniu się zakłócenia d (prawa część) dla danych k = 1, T = 1, r = 2, rT = 1, , d = 1. W obydwu przypadkach odchylenie XTE od zadanej ścieżki jest sprowadzane do zera.
Trajektorie reprezentują symulację statku o danych k = 0,7 [deg/s/deg], T = 60 s oraz parametrów projektowych
r = 2, rT = 1. Nastawy regulatorów dobrano według tab. 1 i tab. 3. Odległości na rysunkach są podane w metrach.
W przypadku rys. 6a statek po wyjściu z portu skręca ku wschodowi kierując się na pobliską ścieżkę. Trajektoria z rys. 6b rozpoczyna się od dojścia w pobliże ścieżki, po którym następuje właściwe śledzenie. Podobnie jest na rys. 6c, ale wobec przeciwnego kierunku podróży w stosunku do wyjścia z portu statek rozpoczyna od zawracania.
Oprogramowanie realizujące sterowanie kursem i śledzenie ścieżki jest obecnie testowane w prototypowym autopilocie, którego panel czołowy pokazano na rys. 6d [18]. Przycisk HCS aktywuje sterowanie kursem z wartością zadaną SET HEADING i mierzoną GYRO. Przycisk TRACK CONTROL aktywuje śledzenie. Wśród parametrów ustawianych w SETUP znajdują się r oraz rT.
Rys. 5. Odpowiedź układu kaskadowego przy przejściu na nową ścieżkę i pojawieniu się zakłócenia
Fig. 5. Cascade system response when changing to a new path and when disturbance occurs

5. Trajektorie statku
Na rys. 6a, b, c pokazano trajektorie wprowadzania statku przez autopilota na trzy różne ścieżki będące pierwszymi skład-
6. Podsumowanie
Przedstawiono jednolity sposób projektowania regulatora kursu i regulatora śledzenia ścieżki przewidzianych dla autopilota sterującego statkiem w fazach żeglugi przybrzeżnej i żeglugi na wodach otwartych. Regulator kursu jest projektowany dla statku opisanego modelem Nomoto, czyli integratora ze stałą czasową. Pokazano, że w odniesieniu do regulatora śledzenia w układzie kaskadowym, model odchyleń XTE od ścieżki
Rys. 6. a, b, c – trajektorie wyprowadzania statku na ścieżkę, d – panel operatorski prototypowego autopilota [18]
Fig. 6. a, b, c – trajectories for moving the ship onto the path, d – the operator panel of the prototype autopilot [18]
a) b) c) d)
p Ti Td T T r r r T 2 2 + 2) ( 4 + rT r T
k
48 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
wygląda analogicznie. Przyjęto, że stałą czasowa odpowiedniego układu zamkniętego ma r- lub rT-krotnie różni się od stałej czasowej sterowanego obiektu. W podanych tabelach nastaw występują parametry modelu Nomoto, parametry projektowe r oraz rT, a także prędkość statku. Pokazano, że regulator kursu z zaproponowanymi nastawami lepiej tłumi zakłócenia środowiskowe, niż regulator z nastawami wzorcowymi [1, 2].
Projekt finansowany w ramach programu Ministra Edukacji i Nauki pod nazwą „Regionalna Inicjatywa Doskonałości” w latach 2019–2023, nr projektu 027/RID/2018/19, kwota finansowania 11 999 900 zł.
1. Fossen T.I., Guidance and Control of Ocean Vehicles (4th ed.), Wiley, Chichester, 1999.
2. Fossen T.I., Marine Control Systems, Marine Cybernetics, Trondheim, 2002.
3. Lisowski J., Statek jako obiekt sterowania automatycznego, Wyd. Morskie, Gdańsk, 1981.
4. Morawski L., Pomirski J., Rak A., A cascade control system for trajectory tracking, [In:] 4th International Congress on Maritime Technological Innovations and Research, 2004, 265–276.
5. Chen C.Y., Ruiz M.T., Delefortrie G., Vantorre M., Lataire E., An Energy-EfficientAdaptiveCourseControl System for Ocean Surface Ships, 11th International Workshop on Ship and Marine Hydrodynamics, Hamburg, 2019, DOI: 10.15480/882.3349.
6. van Amerongen J., van Nauta Lemke H.R., van der Veen J.C.T., An autopilot for ships designed with fuzzy sets, “IFAC Proceedings Volumes”, Vol. 10, No. 16, 1977, 479–487, DOI: 10.1016/S1474-6670(17)69559-4.
7. Tomera M., Fuzzy Self-tuning PID Controller for a Ship Autopilot, Proceedings of the 12th International Conference on Marine Navigation and Safety of see transportation, TransNav, Gdynia, 2017.
8. Moreira L., Fossen T.T., Guedes Soares C., Modeling, Guidance and Control of “Esso Osaca” Model, Internal Report, No. 2005-2-W, Trondheim, 2005.
9. Temiz I., An Investigation on the Ship Rudder with Different Control Systems, “Elektronika ir Elektrotechnika”, Vol. 105, No. 9, 2010, 28–32.
10. Trybus L., Świder Z., Stec A., Tuning Rules of Conventional and Advanced Ship Autopilot Controllers, Automation 2015, 303–311.
11. Bożek A., Trybus L., Krok dyskretyzacji i nastawy PID w dyskretnym serwomechanizmie napięciowym, „Pomiary Automatyka Robotyka”, R. 26, Nr 1, 2022, 5–10, DOI: 10.14313/PAR_243/5.
12. Fossen T.I., Breivik M., Skjetne R., Line-of-sight path following of underactuated marine craft. “IFAC Proceedings Volumes”, Vol. 36, No. 21, 2003, 211–216, DOI: 10.1016/S1474-6670(17)37809-6.
13. Caharija W., Pettersen K.Y., Bibuli M., Calado P., Zereik E., Braga J., Gravdahl J.T., Sørensen A.J., Milovanović M., Bruzzone G., Integral Line-of-Sight guidance and control of underactuated marine vehicles: Theory, simulations, and experiments. “IEEE Transactions on Control Systems Technology”, Vol. 24, No. 5, 2016, 1623–1642, DOI: 10.1109/TCST.2015.2504838.
14. Kula K., Tomera M., Control system of training ship keeping the desired path consisting of straight-lines and circular arcs, “TransNav: International Journal on Marine Navigation and Safety of See Transportation”, Vol. 11, No. 4, 2017, 711–719, DOI: 10.12716/1001.11.04.19.
15. ALPHASEAPILOT MFC Autopilot Operating Manual, Alphatron, https://www.alphatronmarine.com
16. FAP-2000 Autopilot Operator Manual, Furuno, https://www.furuno.com
17. Simrad AP70/80 Operator Manual, Simrad, https://rowlandsmarine.co.uk
18. Praxis Automation Technology B.V., http://www.praxis-automation.nl.
Uniform approach to selection of PID settings for heading and path tracking controllers that create a cascade control system for ship autopilot is presented. Uniformity of the design follows from observation that for each of the controllers the controlled plant looks like an integrator with time constant. In case of the heading controller, the plant is represented by the known Nomoto model. Due to elimination of the plant time constant by the controller, each of the closed loop systems becomes of 2nd order. One assumes that such system should have a double time constant, different in a prescribed ratio from time constant of the controlled plant. It is shown that the heading controller designed in this way suppresses disturbances better than the controller with standard settings.
Keywords
49
ORCID: 0000-0002-5615-3626



ORCID: 0000-0003-3504-5340
ORCID: 0000-0002-1415-3679
50 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Właściwe określenie istotnych czynników wpływających na przebieg obliczeń manewru uniknięcia kolizji z ruchomymi przeszkodami jest niezbędne w celu zapewnienia wyliczenia dostatecznie wiarygodnych wyników opisujących proponowaną trajektorię tego manewru oraz jego realizację. Istotnym wskaźnikiem weryfikującym przebieg manewru omijania jest zachowanie żądanych separacji między samolotem a przeszkodami. Przedmiotem pracy jest wybór odpowiednich matematycznych modeli dla poszczególnych faz przygotowania przebiegu trajektorii omijania przeszkód. Badano wpływ różnych uproszczeń matematycznych modeli na przebieg manewru antykolizyjnego z uwzględnieniem deformacji trajektorii i zmian przebiegu odległości samolotu od ruchomych przeszkód. Rozważania zostały zilustrowane wybranymi wynikami z symulacji komputerowych wybranego manewru ominięcia przeszkód przez samolot.
1. Wprowadzenie
Uzyskanie wysokiego poziomu bezpieczeństwa lotu samolotu ze względu na zagrożenia kolizji z ruchomymi przeszkodami wymaga nie tylko odpowiednio dokładnych i wiarygodnych urządzeń wykrywających przeszkody [1] ale istotne jest uwzględnienie czynników wpływających na wyliczenie wiarygodnej i efektywnej trajektorii omijania przeszkód i jej realizację. W pracy skupiono się na czynnikach wewnętrznych oddziaływujących na obliczenia trajektorii manewru antykolizyjnego. Wybór sposobu przygotowania przebiegu trajektorii omijania stanowi kompromis pomiędzy długością niezbędnego czasu do jej wyliczenia a dokładnością i wiarygodnością tych wyliczeń. Dokładność można zdefiniować jako osiągnięcie dostatecznie bliskich wartości wskaźników do wartości założonych. Wspomniane wskaźniki, do osiągniecia których należy dążyć, opisane w pracach [3, 7, 11] są składnikami wskaźnika jakości (optymalizowaną funkcją celu) i stanowią między innymi minimalną odległość od przeszkody, najmniejsze odchy-
lenie od wcześniej planowanej trasy itp. Przy założeniu, że zadane wartości zostały poprawnie przyjęte to ich osiągnięcie powinno zapewnić bezpieczeństwo wynikające z bezkolizyjnego lotu. Uzyskanie tak rozumianej dokładności nie jest całkowicie wystarczające do wspomnianej bezkolizyjności. Dodatkowym niezbędnym warunkiem jest realizowalność przez wybrany latający obiekt przygotowanej trajektorii. Niezbędne do tego jest wykonanie wiarygodnych obliczeń i przeprowadzenie odpowiedniej weryfikacji. W pracy do osiągnięcia jak najkrótszego czasu obliczeń oraz uzyskania bezpiecznej i realizowalnej trajektorii zaproponowano zastosowanie różnych modeli matematycznych samolotu z różnymi stopniami uproszczeń na różnych etapach wykonywanych obliczeń.
W dalszej części pracy zostanie przedstawiony zarys metody, pozwalającej na weryfikację trajektorii ominięcia ruchomych przeszkód znajdujących się w otoczeniu samolotu. Do tego celu jest konieczne wykonanie przynajmniej jednego manewru antykolizyjnego. Taki manewr powinien zapewnić nie tylko bezpieczne ominięcia ruchomych przeszkód i powrót do lotu wzdłuż wcześniej zaplanowanej trajektorii. Do rozważań przyjęto pokazaną na rys. 1 klasę trajektorii złożonego manewru omijania ruchomej przeszkody. Składa się z czterech zakrętów i jednego odcinka prostoliniowego. Wszystkie zakręty wykonywane są z tym samym promieniem rSzi i tą samą
51 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 51–59, DOI: 10.14313/PAR_247/51
zmianą
Rys. 1. Kształt trajektorii omijania ruchomych przeszkód i jej charakterystyczne zmienne
Fig. 1. The shape of trajectory of anti collision manoeuvre and characteristic value
W literaturze dotyczącej zagadnień omijania ruchomych przeszkód najczęściej podawany jest arbitralnie matematyczny model dynamiki obiektu wykorzystany do rozwiązania postawionych w danej publikacji problemów. Przeważnie nie są podawane przyjęte uproszczenia rozpatrywanego modelu [8]. Pomija się kwestie związane z konsekwencjami dokonanych redukcji modelu. Skala możliwych typowych uproszczeń modelu dynamiki samolotu jest szeroka: od najprostszej postaci równań kinetycznych, przez traktowanie samolotu jak punkt materialny ze skupioną w nim masą aż do pełnych nieliniowych równań dynamicznych opisujących ruch samolotu jako sztywną bryłę o sześciu stopniach swobody [5, 10, 12]. Dla ostatniego wymienionego modelu pomija się najczęściej efekty pochodzący od odkształcalności elementów konstrukcyjnych samolotu. Wśród pozostałych istotnych zagadnień modelowania znaczenie ma sposób matematycznego opisu sił i momentów sił aerodynamicznych, funkcjonowanie układów wykonawczych i sposób zamodelowania działania układu napędowego. Dość często dwa ostatnie wymienione elementy modelu są w dostępnych publikacjach pomijane [8, 10]. W dalszej części pracy, spośród wcześniej wymienionych matematycznych modeli wybrano następujące trzy:
Rys. 2. Przebieg trajektorii i współrzędne jej charakterystycznych punktów
Fig. 2. The time – history of trajectory and its characteristic point coordinates
kąta odchylenia samolotu. Opisany kształt trajektorii ma jeden z możliwych kształtów i pozwala skutecznie uniknąć kolizji oraz powrócić do lotu wzdłuż wcześniej zaplanowanej trasy zgodnie z wcześniej przyjętymi założeniami [3].
Trajektorie należące do opisanej klasy (rys. 1 i 2) można opisać czterema następującymi zmiennymi:
Maksymalną zmianą kąta odchylenia w czasie zakrętu –Psi( ).
Długością prostoliniowego odcinka (lub czas lotu wzdłuż tego odcinka – tpr).
−Prędkością kątową zakrętu – Z (zamiennie kąt przechylenia samolotu – )
−Czasem rozpoczęcia manewru – tst.
Ostatnia z wymienionych wielkości, tzn. czas rozpoczęcia manewru jest istotny z punktu widzenia efektywności realizacji zadania i bezpieczeństwa lotu ale nie wpływa na kształt trajektorii samego manewru. Wybrane aspekty wyliczania charakterystycznych zmiennych opisujących trajektorię (rys. 1 i 2) przedstawiono w dalszej części pracy.
−Pełny nieliniowy model traktujący samolot jak sztywną bryłę o sześciu stopniach swobody [5, 12] – wykorzystywany do symulacyjnej weryfikacji wyliczonych trajektorii manewrów antykolizyjnych oraz jako odniesienie do porównania przebiegów wybranych zmiennych stanu z uproszczonymi modelami. Wykorzystywany jest również do obliczeń czasów rozpoczęcia poszczególnych faz manewru omijania ruchomych przeszkód.
Uproszczony model matematyczny zawierający tylko równania kinematyczne (10) do (12) stosowany do wyliczeń optymalnej trajektorii omijania przeszkód.
Uproszczony model zawierający jedno nieliniowe równanie ruchów odchylających (1) oraz kinematyczne równania (9)–(12) stosowany do wyliczenia przybliżonego czasu rozpoczęcia fragmentów manewru omijania przeszkód.
Równanie (1) ruchów odchylających zostało sformułowane w celu wyliczania dokładniejszych ale jeszcze ciągle przybliżonych czasów rozpoczęcia faz manewru. Zmienna P o występująca w tej zależności oznacza prędkość kątową przechylania samolotu i przyjmuje wartość średniej jaka występuję podczas zakrętu. Z uwagi na czas trwania osiągniecia pełnego przechylenia Φ trwającego ok. 0,5 s można przyjąć uzyskanie tej wartości z optymalizacji trajektorii bez opóźnienia. Wstępne wyliczane czasów rozpoczęcia poszczególnych fragmentów trajektorii uzyskane są procedury optymalizu-
52 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
jącej przebieg trajektorii. Ze względu na potrzebę skrócenia czasu działania tej procedury zastosowano uproszczony model liniowy (wzory (10) do (12)). Automatyczna realizacja lotu wzdłuż wyliczonej trajektorii wymaga uwzględnienia inercji wynikającej ze sposobu funkcjonowania automatycznie sterowanego samolotu. Z tego względu niezbędne jest wyliczenie o ile wcześniej (w stosunku do wyliczonych z modelu kinematycznego) należy przekazać do praw sterowania nowe zadane zmienne stanu w celu uzyskania dobrej zgodności wykonanej trajektorii lotu z zadaną.
1 cos, xVS=Ψ (10)
1 sin. yVS=Ψ (11)
oraz równanie pochodnej kąta odchylenia samolotu:
Na sposób wprowadzenia odpowiednich uproszczeń matematycznego modelu wpływa zakres oraz rodzaj badanych ruchów samolotu. Do rozważań przyjęto manewry antykolizyjne wykonywane w płaszczyźnie poziomej, dla których główną rolę odgrywają zakręty. Przyjmuje się, że wszystkie zakręty wykonywane są ze stałą prędkością lotu samolotu i na stałej wysokości [2, 4]. W związku z tym dominujące zmiany odbywają się w ruchu obrotowym, a szczególnie istotne zmiany z punktu widzenia omijania przeszkód zachodzą w ruchu odchylania samolotu. Opisana analiza stała się przesłanką do stworzenia nowego matematycznego modelu samolotu, w którym ruch obrotowy odchylania jest rozpatrywany jak dla bryły sztywnej w związku z czym pochodna prędkości kątowej odchylania R samolotu w układzie związanym z obiektem opisuje zależność:
Specyfika wykonania manewru antykolizyjnego powoduje konieczność postawienia wysokich wymagań odnośnie sposobu działania automatycznego sterowania. Układ taki powinien zapewniać w czasie manewru: krótki czas regulacji (szczególnie w czasie wejście w zakręt), małe przeregulowanie oraz niski poziom oscylacji. Analiza czasu trwania wymienionych faz manewru dla wybranych sytuacji została wcześniej omówiona [4, 5]. Zaproponowane automatyczne sterowanie lotem samolotu wykonującego manewr antykolizyjny działa w oparciu o prawa sterowania w czterech kanałach o następującej postaci [5]:
gdzie P0 – prędkość kątowa przechylania w czasie zakrętu. Założono, że ma stałą wartość taką jak dla warunków równowagi. Przyjęte uproszczenie jest uzasadnione krótkim czasem rzędu 0,5 s niezbędnym do osiągnięcia przyjętej wartości w stosunku do czasu trwania zakrętu (w poniższym przykładzie ok. 8 s). Występujące w równaniu (1) wyrażenia masowe k1, k2, k3 opisują zależności:
() 1 22 1 , XZXZXX kJJmmJJS =−− (2)
() 22 2 , kmJJJJXXYXZ =−+ (3)
() 3 XZYZX kmJJJJ =−+ (4)
gdzie: m – masa samolotu, JX, JY, JZ i JXZ – momenty bezwładności samolotu, SX – moment statyczny samolotu, N – moment sił zewnętrznych działających na samolot:
L a NNN δ =− (6)
stanowiący sumę momentu sił wynikający z wychylenia lotek:
() ,,,, L L NfV δ δαβ = (7)
oraz moment sił aerodynamicznych działający na samolot:
() ,,,. a NfRV αβ = (8)
Znając pochodną prędkości kątowej odchylania R można wyliczyć pochodną prędkości zakrętu samolotu (w układzie związanym z powierzchnią Ziemi) ze wzoru:
1 coscos. Z R ω =ΦΘ (9)
Pozostałe ruchy opisują równania kinematyczne pochodnych współrzędnych położenia na poziomej płaszczyźnie x1 i y1:
gdzie: , UVW = ⎡⎤ ⎣⎦ V0 PQR = ⎡⎤ ⎣⎦ Ω – składowe prędkości liniowej i kątowej, 111 , xyz ⎡⎤ ⎣⎦ =ΦΘΨ⎡⎤ ⎣⎦ Λ – położenie liniowe i kątowe samolotu HSVSLSTS δδδδ = ⎡⎤ ⎣⎦ u – wektor sterowania (wychylenie powierzchni sterowych: ster wysokości, ster kierunku i lotki oraz manetki gazu).
Formuła ta, przy doborze właściwych współczynników wzmocnienia, zapewnia uzyskanie zakrętu z zadanym kątem przechylenia, który odpowiada określonemu, w stanie ustalonym promieniowi zakrętu. Wartości współczynników wzmocnienia (tabela 1) zostały wyliczone z uwzględnieniem wymienionych wcześniej kryteriów w tym możliwie szybkiej zmiany ruchu samolotu w czasie wejścia w zakręt. Do określenia wartości współczynników wzmocnienia zastosowano całkowy wskaźnika jakości [8, 12]:
gdzie elementy macierzy wagowych Q1 i R1 zostały dobrane eksperymentalnie na drodze symulacji cyfrowych ruchu matematycznego modelu samolotu [8, 12].
Zmienne stanu samolotu występujące w prawach sterowania z indeksem ‘z’ stanowią zadane wartości wyliczane w sposób pokazany w dalszej części pracy.
(1)
Zω Ψ= (12)
(13) ()() () () 1111 VVVV VSzPzVRz KKPPKVKRR δ Φ =Φ−Φ+−++− (14) ()() () () 1111 LLLL LSzPzVRz KKPPKVKRR δ Φ =Φ−Φ+−++− (15) (16)
() TT 11 0 + ttK S t Jdt = ∫ xQxuRu (17)
53
Tabela 1. Współczynniki wzmocnienia praw sterowania dla przyjętej prędkości lotu
Table 1. Gain factors of control laws for selected airplane velocity
0,44770,35799,83240,1032–58,4015
2,16451,9199–41,286–0,95710,0
1,47966,2199–16,125120,5940,0
Wykonanie lotu wzdłuż uzyskanej trajektorii wymaga wyliczenia zadanych zmiennych stanu samolotu. Dla danego scenariusza wyliczone zmienne opisujące optymalną trajektorię stanowią część zadanych zmiennych stanu samolotu (tabela 2) – są to m.in. najistotniejsze parametry, jak wartość bezwzględna kąta przechylenia ΦZ oraz kąta odchylenia ΨZ opisujące sposób wykonania kolejnych zakrętów. Kąt pochylenia przyjęto jak dla warunków lotu ustalonego (na stałej wysokości) i ze stałą prędkością lotu. Dla zadanego kąta ΦZ można wyznaczyć zadaną prędkość kątową zakrętu wykorzystując następującą zależność:
() tg/ ZZZS gV ω =Ψ=Φ (18)
Otrzymana w ten sposób wartość ω z umożliwia wyliczenie zadanych składowych prędkości kątowych w układzie samolotowym na podstawie zależności: 010sin 00cossincos
Dla stałego modułu prędkości liniowej samolotu VS zadane składowe prędkości liniowej wyliczono przy założeniu, że zakręt jest prawidłowy czyli wykonywany z zerową wartością kąta ślizgu β = 0,0°, a kąt natarcia ma wartość jak dla warunków ustalonych. Uwzględniając podane kąty i podstawiając je do elementarnych zależności [10] opisujących składowe prędkości samolotu uzyskujemy trzy składowe prędkości liniowej w układzie związanym z samolotem: VS =[U V W]. Przedstawiony sposób obliczeń zadanych wartości zmiennych stanu samolotu pozwala (zgodnie z podanymi prawami sterowania (13)–(16)) wykonać automatycznie manewr omijania ruchomych przeszkód. Warunkiem uzyskania dobrego odwzorowania zadanej trajektorii w czasie automatycznie sterowanego lotu samolotu były
nie tylko odpowiednie wartości zadanych zmiennych stanu, ale odpowiednio wyliczony czas ich kolejnych zmian. Uzyskane czasy z obliczeń optymalnej trajektorii wykorzystujące liniowy model samolotu nie uwzględniają opóźnień wynikających z bezwładności rzeczywistego obiektu.
W związku z tym niezbędne jest wyliczenie odpowiedniego wyprzedzenia czasowego Δt zmiany zadanych zmiennych stanu w stosunku do czasów wynikających z optymalnej trajektorii. Obliczenia czasów t1 do t6 uzyskano (rys. 1) na drodze dwuetapowej optymalizacji, dla której funkcją celu jest osiągnięcie wybranych, zadanych parametrów trajektorii (20)–(25). Wartości początkowe do optymalizacji uzyskano z symulacji modelu uproszczonego (rys. 3). W wyniku pierwszej fazy optymalizacji z użyciem pełnego nieliniowego modelu samolotu (rys. 3) uzyskać można wartości czasów t1, t2 i t3 takie, że:
ZZ
0sincoscos
ZZZZ ZZZZZ P Q R ω
⎢⎥⎢⎥⎢⎥ ⎢⎥⎢⎥⎢⎥
⎣⎦⎣⎦⎣⎦ (19)
−Θ ⎡⎤⎡⎤⎡⎤ ⎢⎥⎢⎥⎢⎥ =ΦΦΘ
−ΦΦΘ
10 dlamin, SSZ tt=Ψ−Ψ (20) 21 dlamin, SSZ
(
321111 dlaminmin.
ttxxyy =Ψ−Ψ∧−+−⎛⎞ ⎜⎟ ⎝⎠ (22)
że: ( ) ( ) 22 431111 dlaminmin,
ttxxyy =Ψ−Ψ∧−+−⎛⎞ ⎜⎟ ⎝⎠ (23) 54 dlamin, SSZ tt=Ψ−Ψ (24) ( ) ( ) 22 651111 dlaminmin. SSZwprwpr ttxxyy =Ψ−Ψ∧−+−⎛⎞ ⎜⎟ ⎝⎠ (25)
tt=Ψ−Ψ (21)
) ( ) 22
SSZpprppr
W drugiej fazie optymalizacji wyliczane są t4, t5 i t6 takie,
SSZkprkpr
1 H U s K m ⎡⎤ ⎢⎥ ⎣⎦ 1 H Q s K rad ⎡⎤ ⎢⎥ ⎣⎦ 11 H z K m ⎡⎤ ⎢⎥ ⎣⎦ 1 H K rad Θ ⎡⎤ ⎢⎥ ⎣⎦
1 V V s K m ⎡⎤ ⎢⎥ ⎣⎦ 1 V P s K rad ⎡⎤ ⎢⎥ ⎣⎦ 1 V R s K rad ⎡⎤ ⎢⎥ ⎣⎦ 1 V K rad Φ ⎡⎤ ⎢⎥ ⎣⎦ 1 V K rad Ψ ⎡⎤ ⎢⎥ ⎣⎦
1 L V s K m ⎡⎤ ⎢⎥ ⎣⎦ 1 L P s K rad ⎡⎤ ⎢⎥ ⎣⎦ 1 L R s K rad ⎡⎤ ⎢⎥ ⎣⎦ 1 L K rad Φ ⎡⎤ ⎢⎥ ⎣⎦ 1 L K rad Ψ ⎡⎤ ⎢⎥ ⎣⎦
1 T U s K m ⎡⎤ ⎢⎥ ⎣⎦ 1 T W s K m ⎡⎤ ⎢⎥ ⎣⎦ 1 T Q s K rad ⎡⎤ ⎢⎥ ⎣⎦ 11 T z K m ⎡⎤ ⎢⎥ ⎣⎦ 1 T K rad Θ ⎡⎤ ⎢⎥ ⎣⎦
54 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
452,123,5–177,1-3,9–140,1
Przedstawiony w tym rozdziale sposób obliczeń zmiennych zadanych oraz czasów i zmian pozwala na realizacje manewru omijania. Wcześniej należy wykonać weryfikację przebiegu tego manewru na drodze symulacji wykorzystując pełny matematyczny model samolotu (rys. 3).
Podane zostały minimalne odległości (tabela 2) między samolotem a poszczególnymi przeszkodami w trakcie wykonywania manewru antykolizyjnego. Biorąc pod uwagę przyjęte wcześniej założenie o najmniejszej wartości odległości od przeszkody wynoszącej 270 m w pokazanym obliczeniowym przykładzie udało się spełnić to założenie.
Najmniejsza minimalna odległość wystąpiła dla przeszkody nr 3 i była większa od założonej tylko o 0,1 m. Przebieg wyliczonej optymalnej trajektorii omijania i trasy pięciu przeszkód przedstawiono na rys. 4.
Niezbędne symulacje przeprowadzono wykorzystując nieliniowy, matematyczny model dynamiki samolotu typu I-23 Manager opisany układem równań różniczkowych zwyczajnych [10, 12]. Rozwiązanie tych równań uzyskano wykorzystując procedurę biblioteczną MATLAB Rungego-Kutty czwartego rzędu z krokiem całkowania dt = 0,01 s.
Do symulacji wybrano samolot typu I-23 Manager o masie m = 1050 kg i rozpiętości skrzydeł b = 8,95 m. Obiekt poruszał się ze stałą prędkością VS = 50 m/s na stałej wysokości równej H = 200 m.
Wykorzystując przeprowadzoną w poprzednim rozdziale analizę, a w tym zależności (13) i (14) oraz informacje z wyników optymalizacji trajektorii omijania zawartą w Tab. 2 uzyskano następujące zadane wartości zmiennych stanu:
• Kąt odchylenia i przechylenia:
dla t1: ΨZ1 = –88,33°, ΦZ = –41,7°;







dla t2: ΨZ2 = 0°, ΦZ2 = +41,7°;
dla t3: ΨZ3 = 0°, ΦZ3 = 0°;
dla t4: ΨZ4 = +88,33°, ΦZ4 = +41,7°;
dla t5: ΨZ5 = 0°, ΦZ5 = –41,7°;
dla t6: ΨZ6 = 0°, ΦZ6 = 0°.
• Kąt pochylenia (jak dla lotu w warunkach ustalonych) dla całego manewru: ΘZ = 3,42°.
• Na podstawie wzoru (13) otrzymano bezwzględną wartość prędkość zakrętu ω z = 9,92°/s wstawiając do zależności (14) mamy prędkości kątowe:
dla t1: [PZ QZ RZ] = [0 0 –7,22]°/s; dla t2: [0 0 7,22]°/s, dla t3: [0 0 0]°/s, dla t4: [0 0 7,22]°/s, dla t5: [0 0 –7,22]°/s; dla t6: [0 0 0]°/s.
• Prędkość liniowa i jej składowe dla całego manewru:
Wykorzystując procedurę optymalizacji trajektorii PSO wraz z opisanym wskaźnikiem jakości w publikacjach [3, 7, 9, 11] uzyskano zestaw czterech optymalizowanych parametrów o wartościach podanych w tabeli 2. Zamieszczono tam dane opisujące pięć ruchomych przeszkód przemieszczających się ze stałymi ale różniącymi się między sobą prędkościami z przedziału < 50 m/s, 180 m/s > na stałej wysokości H = 200 m. Wszystkie poruszały się ze stałymi ale różnymi kierunkami z przedziału < –120°, 140° >.
VS = [U V W] = [49,7 0 3,72] m/s (jak dla warunków ustalonych kąt ślizgu β = 0,0° i kąt natarcia α = 3,42°):
• Stała wysokość lotu dla całego manewru: H = 200 m.
Przeprowadzając optymalizację zgodnie z zależnościami (15) do (19) uzyskano wartości czasów t1 do t6 zamieszczone w tabeli 3, w której zamieszczono również czasy otrzymane z optymalizacji trajektorii.
W dalszej części pracy zamieszczono wyniki z obliczeń symulacyjnych porównujących między innymi wybrane zmienne stanu
Max. kąt odchylenia [deg]
Długość części prostoliniowej [m]
Czas rozpoczęcia manewru [s] Kąt przechylenia [deg]
Przyrost długości drogi [m]
Tabela 2. Wybrane dane i wyniki optymalizacji dla przyjętego scenariusza
Nr Przeszkody12345 Prędkość [m/s]70.01601806050 Kierunek ruchu [deg]14012080 –60 –120 Min. odległość od przeszkody [m]271,2287,4270,1387,6455,4
Table 2. Selected data and results of optimization for accepted scenario
88,33355,43,2241,7 573,6
Rys. 3. Schemat struktury wyliczenia zmiennych dla automatycznego sterowania manewrem antykolizyjnym i weryfikacja uzyskanych wyników
Fig. 3. Scheme representing the computation process of automatic control for anti-collision manoeuvre and verification of obtained results
55
Tabela 3. Wyliczone czasy zmiany zadanych zmiennych stanu
Table 3. Calculated time of the variation of desired state variable
Czasy rozpoczęcia faz manewru t1 [s] t2 [s] t3 [s] t4 [s] t5 [s] t6 [s]
uzyskane z symulacji komputerowej omijania wspomnianych przeszkód dla różnych uproszczeń matematycznego modelu samolotu. Na rys. 5a przedstawiono przebieg prędkości kątowej z jaką samolot wykonuje dwa pierwsze zakręty podczas realizacji manewru antykolizyjnego.
Na przykładzie tej istotnej zmiennej dla wspomnianego manewru porównano zachowanie się pełnego matematycz-
nego modelu samolotu i modelu uproszczonego. Różnice prędkości zakrętu między modelem pełnym a zredukowanym i kinematycznym zawarto na rys. 5b. Konsekwencjami tych różnic są rozbieżności przebiegu fragmentu trajektorii lotu przedstawionego na rys. 7a. Wykonywany manewr ma na celu zachowanie odpowiednich odległości między samolotem a przeszkodami rSPi. Przebiegi tych odległości uzyskane
Rys. 5. Prędkości zakrętów i ich różnice w czasie manewru antykolizyjnego dla różnych uproszczeń matematycznego modelu
Fig. 5. Velocities during turns and its differences in anti-collision manoeuvres for some variety of mathematical model simplifications
z optymalizacji czasu2,3411,0419,4126,0135,2243,34
Uzyskane z optymalizacji trasy3,2212,1221,0228,1237,0245,92 Uzyskane
a)
b)
56 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 4. Optymalna trajektoria manewru omijania i trajektorie przeszkód Fig. 4. Optimal trajectory of the anti-collision manoeuvre and obstacles trajectory
Rys. 6. Różnice odległości między samolotem a przeszkodami dla różnych uproszczeń matematycznego modelu
Fig. 6. Differences of aircraft to obstacle distance for some variety of mathematical model simplifications
Rys. 7. Początkowy fragment trajektorii manewru antykolizyjnego dla różnych matematycznych modeli (a) oraz odległości samolotu od przeszkód – pełny model (b) Fig. 7 a) Initial fragment of anti-collision trajectory for varied mathematical model, b) distance between airplane and obstacles – complete model
dla pełnego matematycznego modelu zamieszczono na rys. 7b. Uproszczenia modelu matematycznego zredukowanego skutkowały w stosunku do modelu pełnego różnicami odległości samolotu i przeszkód pokazanymi na rys. 6a. Z kolei uproszczenia modelu kinematycznego przejawiają się wspomnianymi rozbieżności zilustrowanymi na rys. 6b. W tym drugim przypadku największa różnica osiągała wartości 85 m, a w pierw-
szym 40 m. Dla większości przeszkód minimalne odległości samolotu od przeszkód wystąpiły w przedziale < 18 s, 20 s >. Weryfikacja wykonalności manewru antykolizyjnego została przeprowadzona na drodze symulacji z wykorzystaniem pełnego nieliniowego modelu.
Uzyskane wyniki pokazano na przykładzie wybranych zmiennych stanu i sterowania (rys. 8, 9 i 10). Prędkości kątowe prze-
a) b)
a)
b)
a)
b)
57
Rys. 8. Położenie kątowe lotek i steru kierunku uzyskane z weryfikacji trajektorii Fig. 8. Ailerons and ruder deflections obtained from trajectory verification
Rys. 9. Prędkość kątowa przechylenia i odchylenia samolotu uzyskane z weryfikacji trajektorii
Fig. 9. Roll and yaw angular velocity of airplane obtained from verification trajectory
a) b)
Rys. 10. Kąt przechylenia i odchylenia samolotu uzyskane z weryfikacji trajektorii
chylania i odchylania występujące w symulowanym locie samolotu prezentują wykresy na rys. 9. W zmianach tych prędkości występują przeregulowanie na poziomie do 4°/s. Podobnemu zjawisku ulegał kąt przechylenia samolotu (do 3°) pokazany na rys. 10a. Ze względów na bezpieczeństwo lotu starano się utrzymywać wartości tego kąta na poziomie zapewniającym stabilność ruchu samolotu. W związku z tym kąt przechylenia podczas manewru antykolizyjnego nie przekraczał poziomu 45°. Sposób zmian kąta odchylenia samolotu dla weryfikowanego manewru ilustruje wykres na rys. 10b. Na wykresach (rys. 8) zamieszczono zmiany kątów położenia lotek i steru kierunku. Maksymalne kąty położenia lotek osiągają wartość 15°, co stanowi ich graniczne wartości wychylenia dla przyjętego typu samolotu.
8. Wnioski
Przedstawiony materiał i wyniki symulacji numerycznych z użyciem różnych modeli matematycznych samolotu w procesie przygotowania i weryfikacji manewru omijania ruchomych przeszkód pozwala na sformułowanie następujących wniosków:
Wprowadzane uproszczenia w matematycznym modelu samolotu wpływały na przebiegi wybranych jego zmiennych stanu, które uzyskiwano z komputerowych symulacji.
Uproszczenia modeli wykorzystanych do optymalizacji manewru antykolizyjnego mogą skutkować dużymi różnicami minimalnych odległości samolotu od przeszkód co obniża poziom bezpieczeństwa lotu.
Zastosowanie modeli o różnym stopniu uproszczenia dla odpowiednich etapów przygotowania manewru antykolizyjnego pozwala na zachowanie kompromisu między długotrwałością obliczeń a możliwością uzyskania założonego poziomu bezpieczeństwa.
Potwierdzenie słuszności przedstawionej metody wymaga wykonania dalszych badań dla szeregu różnych czynników związanych z dynamiką lotu i sprawdzenia jej dla różnych scenariuszy i konfiguracji występujących przeszkód.
1. Graffstein J., Functioning of air anti-collision system during test flight, “Aviation”, Vol. 18, No. 1, 2014, 44–51, DOI: 10.3846/16487788.2014.865945.
2. Graffstein J., Manewry wykonywane przez samolot podczas omijania ruchomej przeszkody dla wybranych scenariuszy “Pomiary Automatyka Robotyka”, R. 19, Nr 2, 2015, 19–24, DOI: 10.14313/PAR_216/19.
3. Graffstein J., Sposób wyboru optymalnej trajektorii lotu manewru antykolizyjnego realizowanego w otoczeniu rucho-
a)
b)
Fig. 10. Roll and yaw angular of airplane obtained from verification trajectory 58 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
mych przeszkód. „Pomiary Automatyka Robotyka”, R. 22, Nr 4, 2018, 5–11, DOI: 10.14313/PAR_230/5.
4. Graffstein J., Selected aspects of automatic maneuver control to avoid moving obstacles resulting from the simulation analysis of the course of aircraft movement, Advances in Intelligent Systems and Computing, “Challenges in Automation, Robotics and Measurement Techniques”, Vol. 440, 2016, 127–139, DOI: 10.1007/978-3-319-29357-8_12.
5. Graffstein J., Symulacja przebiegu automatycznie sterowanego manewru omijania ruchomej przeszkody w warunkach podejścia do lądowania, „Mechanika w Lotnictwie”, PTMTiS, 2016, 113–125.
6. Lin C.E., Wu Y.-Y., Collision avoidance solution for low-altitude flights, “Journal Aerospace Engineering”, Vol. 225, No 7, 2011, 779–790, DOI: 10.1177/0954410011399211.
7. Lin Z., Castano L., Mortimer E., Xu H., Fast 3D collision avoidance algorithm for fixed wing UAS, “Journal of Intelligent and Robotic Systems”, Vol. 97, 2019, 577–604, DOI: 10.1007/s10846-019-01037-7.
8. Nelson R.C., Flight Stability and Automatic Control, McGraw-Hill Book Company, New York 1997.

9. Paielli R.A., Modeling maneuver dynamics in air traffic conflict resolution, “Journal of Guidance, Control, and Dynamics”, Vol. 26, No. 3, 2003, 407–415, DOI: 10.2514/2.5078.
10. Phillips W.F., Mechanics of Flight, John Willey & Sons, Inc, New Jersey 2010.
11. Pal N.S., Sharma S., Robot path planning using swarm intelligence: A Survey, “International Journal of Computer Applications”, Vol. 83, No. 12, 2013, 5–12, DOI: 10.5120/14498-2274.
12. Stevens B.L., Levis F.L., Aircraft Control and Simulation. J. Wiley & Sons, Inc., 2016.
A relevant identification of significant factors affecting the process of anti collision manoeuvre computation in case of moving obstacles, is necessary for getting results reliable enough and describing a proposed trajectory of such a manoeuvre as well as its realisation. The requirement for the appropriate separation, the airplane to obstacle distance, is treated as the relevant index for verification of the course of passing by manoeuvre. Subject matter of this work is the appropriate selection of mathematical models for the subsequent phases of preparation of flight trajectory passing by the obstacles. The impact of selected simplifications of mathematical model on the shape of flight trajectory and the distance between the airplane and obstacles have been studied. Considerations have been illustrated by the results of selected computer simulations of an airplane while carrying out an obstacle avoiding manoeuvre.
Keywords
ORCID: 0000-0002-9329-8648
-59
60 NR 3/2015 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Autopiloty okrętowe można podzielić na konwencjonalne, zdolne jedynie do utrzymywania zadanego kursu, oraz zaawansowane, które dodatkowo mogą utrzymywać statek na „ścieżce” łączącej zadane punkty nawigacyjne na trasie). W artykule przedstawiono strukturę prototypowego autopilota statku zaimplementowanego w środowisku CPDev oraz wzory pozwalające wyznaczyć nastawy regulatora kursu (PIDH) oraz ścieżki (PIDT) w regulacji kaskadowej. Dla każdego z nich przyjęto pojedyncze parametry projektowe określające dynamikę zamkniętej pętli regulacji. Reguły te zastosowano w oprogramowaniu prototypu autopilota, stworzonego we współpracy z holenderską firmą projektującą systemy sterowania i wizualizacji dla statków.
1. Wprowadzenie
Sterowanie kursem statku jest realizowane zwykle przez autopiloty, które automatycznie korygują kurs wykorzystując wbudowane urządzenia sterowe. Taki adaptacyjny autopilot dostosowuje ustawienia regulatora kursu w zależności od prędkości statku, stanu morza oraz innych czynników. Dodatkowo, oprócz utrzymywania zadanego przez operatora stałego kursu, może być w stanie prowadzić statek po „ścieżce” łączącej kolejne punkty nawigacyjne, i to mimo zakłóceń np. od prądów morskich czy wpływu wiatru. Taki system wymaga zainstalowania modułu nawigacji obszarowej, który oblicza odchylenie od zaprogramowanej trasy, a następnie automatycznie wprowadza konieczne poprawki.
Klasycznym algorytmem sterowania kursem statku (ang. heading) jest PID z nastawami wyznaczonymi dla uproszczonego opisu dynamiki, znanego jako model Nomoto [1–3], mającego postać integratora ze stałą czasową. Śledzenie prostoliniowego fragmentu trasy, inaczej ścieżki (ang. track), można realizować w układzie kaskadowym [4, 5] z regulatorem nadrzędnym, który to wyznacza kurs dla regulatora podrzędnego. Oba regulatory mogą być typu PID, lub w nowszych rozwiązaniach, zrealizowane jako regulatory rozmyte (ang. fuzzy) [6].
Komercyjne autopiloty statków można podzielić na trzy podstawowe grupy – pierwszą grupę stanowią proste regulatory kursu, których nastawy dobierane są ręcznie [12]. Druga obej-
muje urządzenia wyposażone w GPS [13], które mogą kierować statek do wybranego punktu (ang. Goto Waypoint) lub przechwytywać ścieżkę (ang. Goto Track). Trzecią grupę stanowią wielomodułowe rozwiązania z wbudowanym trybem śledzenia ścieżki oraz możliwością planowania trasy podróży, np. na urządzeniu ECDIS (ang. Electronic Chart Display Information System) [14].
W artykule podano zasady określania nastaw, zarówno dla regulatora kursu (PIDH), jak i regulatora „ścieżki” (PIDT) oraz przedstawiono środowisko inżynierskie CPDev, w którym to zaimplementowano prezentowany prototyp autopilota. Został on przetestowany na pełnym (nieliniowym) modelu kontenerowca 4-DOF, zaimplementowanym również w pakiecie CPDev, a wybrane wyniki z badań przedstawiono w dalszej części artykułu.
Pełny (nieliniowy) model statku 4-DOF jest opisany równaniami w przestrzeni stanów, jednak jest on zbyt złożony do określenia analitycznych wyrażeń dla obliczenia nastaw poszczególnych regulatorów. Dlatego więc do takiego projektowania zwykle stosuje się uproszczony model statku, zwany modelem Nomoto [1–3], w postaci połączenia członu całkującego z członem inercyjnym (1). Określa on, jak wychylenie steru δ wpływa na kąt ψ (kurs), pod jakim statek płynie.
Wzmocnienie k w modelu zależy wprost proporcjonalnie, a stała czasowa T odwrotnie proporcjonalnie od prędkości statku V, czyli
Przyjmuje się, że wartości referencyjne {k0, T0, V0} występujące we wzorach (1) są znane z wcześniejszych manewrów
,
.
gdzie
(1)
61 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 61–66, DOI: 10.14313/PAR_247/61
wykonanych podczas prób na otwartym morzu lub też określone bezpośrednio po wyjściu statku z portu (przed wyjściem w morze). Tutaj wartości k0, T0 obejmują również dynamikę maszyny sterowej i samego steru.
Strukturę prototypowego regulatora kursu statku, będącego modyfikacją rozwiązań przedstawianych w [1–2, 8], pokazano na rys. 1. Wielkości refψ oraz to odpowiednio wartość zadana i kurs rzeczywisty statku, natomiast oznacza tu kąt wychylenia steru. Wielkości Lψ , są odpowiednio składowymi niskoi wysokoczęstotliwościowymi. Moduł obserwatora stanu generuje dwie estymaty Lψ ˆ i Hψ ˆ , z których to tylko Lψ ˆ (niskoczęstotliwościowa) jest wykorzystywana do sterowania kursem, co pozwala na znaczną redukcję reakcji steru na wpływy zakłóceń środowiskowych. Dodatkowy blok ARMAX estymuje nieznaną częstotliwość fal w n, natomiast ogranicznik prędkości wielkości zadanej eliminuje ewentualne przeregulowania po skokowej zmianie refψ . Wyliczone nastawy dla regulatora PIDH są automatycznie adaptowane do aktualnej prędkości statku V
2.3. Dobór nastaw
Sterowanie kursem statku odbywa się za pomocą klasycznego regulatora PID:
niż stała czasowa T w modelu statku (1). Tak więc, współczynnik r będzie tu głównym parametrem projektowym. Zwiększając r można sprawić, że pętla będzie „szybsza”. Przyjmijmy T2 = T i wtedy transmitancje układu otwartego i zamkniętego, oraz wzmocnienie K, przyjmują postać:
Z przyjętych założeń wynika, że wyznacznik mianownika transmitancji Gcl musi być równy zero, co daje nam warunek na K oraz określa wartości podwójnego bieguna 2 1,s , jak również stała czasowa ma być równa T/r, tak więc T1 będzie wynosić
Ostatecznie, nastawy regulatora PID, otrzymane na podstawie powyższych równań, wynoszą
Pamiętajmy, że nastawy regulatora (5) zależą od prędkości statku V. Symulacje wykazały, że ustawienia należy zmodyfikować, jeśli zmiana prędkości przekroczy 20 %.
System zawierający tylko klasyczny regulator PID w odpowiedzi skokowej może wykazywać pewne przeregulowanie ze względu na człon T1s + 1 w liczniku transmitancji Gcl. Aby to ograniczyć, można zastosować filtr wstępny dla wartości zadanej. Transmitancja układu zamkniętego wyniesie wtedy
Dla obliczeń nastaw regulatora przyjęto brak oscylacji w odpowiedziach przejściowych oraz przebiegi aperiodyczne krytyczne dla skokowych zmian wielkości zadanej refψ . Dodatkowo, stała czasowa zamkniętej pętli regulacji jest określona jako Tcl = T/r, r > 1. Wymaga to, aby stała czasowa Tcl była r razy mniejsza
a) b)
Rys. 2. (a) Położenie steru i kurs statku, (b) Trajektoria X-Y statku (dwie zmiany kursu o 90 stopni, spokojne morze) Fig. 2. (a) Rudder position and ship heading; (b) X-Y trajectory of the ship (two 90 degree heading changes, calm sea)
() ()() () , 1 1 1 1 1 2 1 s T T s T s T k s T s T k s R p d i p + + + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = (2a) , 2 1 2 1 2 1 T T T T T T T T d i + = + = (2b)
, , i p T k k K = . (3)
2 1 4 T K = , 1 1 1,2 2 2 T T K s = = , r T T 2 1 = . (4)
. (5)
. (6)
Rys. 1. Struktura regulatora kursu w autopilocie Fig. 1. Structure of heading controller in autopilot
62 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Na rys. 2 pokazano aktualny kurs statku oraz wychylenie steru przy skokowej zmianie wielkości zadanej (kursu) przy aktywnym tylko regulatorze PIDH (ang. heading control) oraz spokojnym morzu. W chwili t = 50 (punkt A) zmieniono zadany kurs na 90°, a w chwili t = 150 (punkt B) powrócono do pierwotnego kursu 0°. Jak widać na rys. 2a, założony kurs został osiągnięty bez przeregulowania (takie było założenie projektowe).
Na rys. 2b pokazano trajektorię statku we współrzędnych X-Y (kurs 0° jest pionowo do góry, North). W punkcie A zmieniono zadany kurs i statek zakręcił na wschód, a następnie płynął kursem 90°, ale równolegle do ścieżki (odcinka) AB. Podobna sytuacja wystąpiła w punkcie B, gdzie zadany kurs zmieniono z powrotem na 0° (na północ).
Na rys. 3 pokazano wyniki podobnej próby, ale przeprowadzonej przy wzburzonym morzu (BF = 5). Początkowo regulator próbuje kompensować ruchami steru wpływ falowania morza (zakłóceń środowiskowych), ale po chwili obserwator stanu (rys. 1) dostroi się do zakłóceń i sterowanie już w mniejszym stopniu kompensuje te zakłócenia.
Ponieważ dynamika obiektu sterowanego przez PIDT odpowiada transmitancji integratora o stałej czasowej TT, tzn.
i jest tego samego typu, co w (1), więc po zmianie oznaczeń można zastosować wcześniejsze wyniki projektowania dla regulatora kursu PIDH
Można przyjąć
jako stałą czasową kaskadowego układu zamkniętego z odpowiednio dobranym dzielnikiem rT (jest to kolejny parametr projektowy). Nastawy regulatora PIDT będą wynosić (por. (5)):
Strukturę autopilota dla kaskadowej regulacji trasy („ścieżki”) pokazano na rys. 4. Jeśli zostanie wykryte odchylenie y pozycji statku od zadanej „ścieżki”, to regulator trasy (główny) koryguje zadany kurs refψ o wartość refΔψ , tak więc suma staje się nową wielkością zadaną dla regulatora kursu (pomocniczego) [8, 9]. Równania obejmujące aktualną pozycję statku (np. na podstawie sygnału GPS), prędkość V i kurs ψ (lub odchylenie refψ ψ ψ = Δ ) określają obie składowe ruchu (przemieszczenie do przodu x oraz odchylenie prostopadłe do kierunku ruchu y).
PIDT jest regulatorem śledzenia (ang. track), PIDH regulatorem kursu, zaś blok V/s przekształca odchyłkę kursu na odchylenie od ścieżki XTE (ang. Cross Track Error), zależne od prędkości V [1, 2]. Faktyczne odchylenie XTE wyznaczane jest przez moduł nawigacyjny statku.
Na rys. 5 pokazano ponownie aktualny kurs statku oraz wychylenie steru przy skokowej zmianie trasy o 90°, ale teraz aktywny jest cały regulator kaskadowy (tryb track control, por. rys. 4). Regulator PIDT odpowiednio modyfikuje wielkość zadaną dla regulatora kursu PIDH tak, aby utrzymać statek dokładnie na ścieżce (a nie równolegle do niej, jak poprzednio).
Próba na wzburzonym morzu (rys. 6) wygląda podobnie i dzięki zastosowanej strukturze sterowanie (wychylanie steru) w małym stopniu stara się kompensować szybkozmienne zakłócenia od falowania morza, w celu zmniejszenia zużycia paliwa i mechanizmu sterowego.
1) ( ) ( ) ( + = Δ s T s V s s XTE T Tϕ (7)
(8)
.
(9)
Rys. 4. Struktura regulatora trasy („ścieżki”) w autopilocie Fig. 4. Structure of the track-keeping controller in autopilot
Rys. 3. (a) Położenie steru i kurs statku, (b) Trajektoria X-Y statku (dwie zmiany kursu o 90°, wzburzone morze) Fig. 3. (a) Rudder position and ship heading; (b) X-Y trajectory of the ship (two changes of heading by 90°, rough sea) 63
a) b)
a) b)
Rys. 5. (a) Położenie steru i kurs statku, (b) Trajektoria X-Y statku (dwie zmiany kąta ścieżki o 90°, spokojne morze)
Fig. 5. (a) Rudder position and ship heading; (b) X-Y trajectory of the ship (two changes of path angle by 90°, calm sea)
a)
b)
Rys. 6. (a) Położenie steru i kurs statku, (b) Trajektoria X-Y statku (dwie zmiany kąta ścieżki o 90°, wzburzone morze)
Fig. 6. (a) Rudder position and ship heading; (b) X-Y trajectory of the ship (two changes of path angle by 90°, rough sea)
Prace nad nowoczesnym i uniwersalnym środowiskiem inżynierskim, zgodnym z normą IEC 61131-3, rozpoczęły się już ponad 10 lat temu [10, 11]. Opracowane wtedy środowisko nazwane zostało CPDev (ang. Control Program Developer) i od początku wspierało możliwość samodzielnej implementacji na docelowym sprzęcie, zarówno przez inżynierów w przemyśle, jak i studentów na uczelniach. Początkowo wspierało
FBD i SFC są najpierw konwertowane na język ST, a następnie kompilowane do VMASM. Wykonywalny kod binarny programu jest generowany z mnemoników VMASM i ładowany do maszyny wirtualnej. Źródła maszyny wirtualnej napisano w całości w języku C, co znacząco ułatwia przenośność na różne platformy sprzętowe.
Kompilator wykorzystuje zbiór reguł języka ST, biblioteki bloków funkcjonalnych oraz wykaz instrukcji elementarnych realizowanych przez maszynę wirtualną. Oprócz kodu wykonywalnego,
Rys. 7. Etapy tworzenia oprogramowania dla różnych platform sprzętowych
Fig. 7. Stages of software development for various hardware platforms
jedynie język ST, a w kolejnych latach zostało rozszerzone o obsługę pozostałych języków normy IEC 61131-3, jak również o graficzne projektowanie interfejsu HMI, automatyczny generator dokumentacji oraz moduły o zastosowaniu badawczym. Na rys. 7 przedstawiono kolejne etapy przetwarzania programów sterowania napisanych w różnych językach normy. Języki tekstowe (ST, IL) są tu kompilowane do unikalnych kodów mnemonicznych opracowanych na potrzeby środowiska specjalizowanego języka VMASM. Diagramy graficzne LD,
tworzone są informacje służące do śledzenia, uruchamiania i symulacji programu. Konfiguracja zasobów sprzętowych dotyczy pamięci, interfejsu wejścia/wyjścia oraz interfejsu komunikacyjnego, a specyfikacja obejmuje typy i obszary pamięci, liczby oraz typy wejść i wyjść oraz kanały komunikacyjne. Maszyna wirtualna działa jako interpreter wykonując kolejne linie kodu programu. Interfejs dla docelowej platformy składa się z niskopoziomowych funkcji zależnych od sprzętu i systemu operacyjnego, jak aktualizacja wejść i wyjść czy też zarządzanie czasem cyklu.
64 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Jak wspomniano, cały kod autopilota został napisany w języku ST i obejmuje łącznie blisko 900 linii programu, z czego prawie 140 przypada na blok PIDH. Fragment kodu dotyczący regulatora kursu przedstawiono poniżej.
Cały kod autopilota jest w pełni przenaszalny, gdyż wszystkie funkcje pomocnicze (jak np. odwracanie macierzy 3 × 3) zostały napisane od nowa. Nie wykorzystuje on więc żadnych funkcji specyficznych dla danej platformy sprzętowej.
5. Podsumowanie
W artykule przedstawiono strukturę kaskadowego autopilota statku zaimplementowanego w środowisku CPDev oraz zasady analitycznego doboru nastaw, zarówno dla regulatora kursu, jak i trasy (ścieżki). Regulator kursu jest projektowany dla statku opisanego modelem Nomoto, czyli integratora ze stałą czasową. Również w odniesieniu do regulatora śledzenia w układzie kaskadowym, model odchyleń XTE od ścieżki wygląda analogicznie. Dla każdego z nich wymagane są jedynie pojedyncze parametry projektowe do określenia dynamiki w pętli zamkniętej, co znacząco upraszcza proces strojenia i obsługi autopilota statku. Dodatkowo jego zachowanie można dość łatwo dostosować do różnej wielkości statku, stopnia załadunku oraz stanu morza (wiatr, fale). Nastawy są automatycznie dopasowywane do prędkości statku, a wbudowany filtr wstępny i ogranicznik prędkości zadanej dodatkowo eliminuje ewentualne przeregulowania.
Oprogramowanie to jest obecnie testowane w prototypowym autopilocie rozwijanym we współpracy z firmą Praxis Automation Technology B.V. z Holandii [15], który to będzie wdrażany na małych i średnich jednostkach pływających.
Autor dziękuje współtwórcom oprogramowania autopilota oraz całego środowiska CPDev, a w szczególności Leszkowi Trybusowi, Bartoszowi Trybusowi, Janowi Sadolewskiemu, Dariuszowi Rzońca, Andrzejowi Stecowi oraz Marcinowi Jamro. Projekt finansowany w ramach programu Ministra Edukacji i Nauki pod nazwą „Regionalna Inicjatywa Doskonałości” w latach 2019–2023, nr projektu 027/RID/2018/19, kwota finansowania 11 999 900 zł.
1. Fossen T.I., Guidance and Control of Ocean Vehicles (4th ed.), Wiley, Chichester 1999.
2. Fossen T.I., Marine Control Systems, Marine Cybernetics, Trondheim 2002.
3. Lisowski J., Statek jako obiekt sterowania automatycznego, Wydawnictwo Morskie, Gdańsk 1981.
4. Morawski L., Pomirski J., Rak A., A cascade control system for trajectory tracking, 4th International Congress on Maritime Technological Innovations and Research, 2004, 265–276.
5. Chen C.Y., Ruiz M.T., Delefortrie G., Vantorre M., Lataire E., An Energy-Efficient Adaptive Course Control System for Ocean Surface Ships, 11th International Workshop on Ship and Marine Hydrodynamics, Hamburg, 2019, DOI: 10.15480/882.3349.
6. Tomera M., Fuzzy Self-tuning PID Controller for a Ship Autopilot, Proceedings of the 12th International Conference on Marine Navigation and Safety of see transportation, TransNav, Gdynia, 2017, DOI: 10.1201/9781315099132-15.
7. van Amerongen J., van Nauta Lemke H.R., van der Veen J.C.T., An autopilot for ships designed with fuzzy sets, “IFAC Proceedings Volumes”, Vol. 10, No. 16, 1977, 479–487, DOI: 10.1016/S1474-6670(17)69559-4.
8. Świder Z., Implementation of the ship’s autopilot in the CPDev environment, [In:] Szewczyk R., Zieliński C., Kaliczyńska M. (eds): Automation 2022: New Solutions and Technologies for Automation, Robotics and Measurement techniques, Vol. 1427, 2022, 133–142, DOI: 10.1007/978-3-031-03502-9_14.
9. Trybus L., Świder Z., Stec A., Tuning Rules of Conventional and Advanced Ship Autopilot Controllers, [In:] Automation 2015, 303–311, DOI: 10.1007/978-3-319-15796-2_31.
65
10. Jamro M., Rzońca D., Sadolewki J., Stec A., Świder Z., Trybus B., Trybus L., CPDev Engineering Environment for Modeling, Implementation, Testing, and Visualization of Control Software. [In:] Szewczyk R., Zieliński C., Kaliczyńska M. (eds): Recent Advances in Automation, Robotics and Measuring Techniques. Vol. 267, 2014, 81–90, DOI: 10.1007/978-3-319-05353-0_9.
11. Rzońca D., Sadolewski J., Stec A., Świder Z., Trybus B., Trybus L., Mini-DCS system programming in IEC 61131-3 Structured Text, “Journal of Automation, Mobile Robotics and Intelligent Systems”, Vol. 2, No. 3, 2008, 48–54.

12. ALPHASEAPILOT MFC Autopilot Operating Manual, Alphatron, https://www.alphatronmarine.com
13. FAP-2000 Autopilot Operator Manual, Furuno, https://www.furuno.com
14. Simrad AP70/80 Operator Manual, Simrad, https://rowlandsmarine.co.uk
15. Praxis Automation Technology B.V., http://www.praxis-automation.nl
Ship autopilots can be divided into conventional, only capable of maintaining a given heading, and advanced, which can additionally follow a „track” connecting the given navigation points along the ship’s route. The article presents the structure of the prototype autopilot of the ship implemented in the CPDev environment and the formulas allowing to determine the settings of the course controller (PID) and track controller (PI) in the cascade control. For each of them, individual design parameters were adopted to define the dynamics of the closed control loop. These rules were applied in the software of the autopilot prototype, created in cooperation with a Dutch company designing control and visualization systems for ships.
Keywords
ORCID: 0000-0003-3504-5340
66 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Celem opisanego w artykule projektu było opracowanie założeń do automatycznego prowadzenia w inżynierii biomedycznej procesów mikrodozowania cieczy o objętości porcji rzędu 0,5 μl. Przedstawiono budowę wybranych do badań typowych, katalogowych dozowników, niegwarantujących jednak osiągnięcia objętości wymienionej porcji cieczy. Podano zestaw najważniejszych zależności, zjawisk i współczynników charakteryzujących mikroprzepływy cieczy oraz ich zapis, wykorzystany w kalkulatorze procesorowego sterownika zautomatyzowanym procesem mikrodozowania. Opisano budowę stanowiska pomiarowego procesu mikrodozowania, pozwalającego na eksperymentalną weryfikację jakości mikrodozowania cieczy z wykorzystaniem typowych dozowników, opracowanych zależności oraz procesorowego sterownika tego procesu. W podsumowaniu podano rozbieżności między znanymi w elektrohydraulice i hydrotronice formułami teoretycznymi i ich modelami a obserwowanymi w praktyce zjawiskami mikroprzepływu tych cieczy przez przebadane głowice dozowników oraz wyniki zautomatyzowanego mikroporcjowania, spełniające wszystkie podane założenia tego procesu.


1. Wprowadzenie
Odnosząc się do historii racjonalizowania procesów mikrodozowania cieczy należy pamiętać, że do połowy lat 70. XX w. jedyną akceptowalną metodą było stosowanie szklanych kapilar, ręcznie wykonywanych i ręcznie kalibrowanych. Porcjowanie cieczy odbywało się przez ustne zassanie cieczy do kapilary i następnie jej spuszczanie, obserwując jej poziom pomiędzy kreskami kalibracji naniesionymi na kapilarę. Możliwe było porcjowanie cieczy o objętości 0,1 ml. Dopiero w latach 80. XX w. wprowadzono kolejne ulepszenie tego procesu przez zastosowanie tzw. „automatycznych” pipet. Metoda ta zapewniała pobieranie cieczy do wnętrza pipety, korzystając z mechanicznego zassania i następnie mechanicznego, wykonywanego
ręcznie, wyciśnięcia nastawionej zderzakami jej porcji. Możliwe było także zastosowanie tzw. „grabi”, czyli wielu końcówek pipety, powtarzających równolegle proces mikrodozowania i przyspieszających jego wykonywanie. Jednak i tu granicą dozowania była objętość 0,1 ml.
Lata przełomu XX i XXI w. i kolejne dwa dziesięciolecia, ze względu na rozwój mechatronizacji produktów i produkcji [2, 6, 7, 14], w tym przemysłów powiązanych z inżynierią biomedyczną oraz intensywnością i powszechnością badań diagnostycznych i naukowych, stają się okresem poszukiwania kolejnych nowych, innowacyjnych rozwiązań służących mikrodozowaniu, w tym jego pełnej automatyzacji i zmniejszenia porcji dozowanych cieczy (Rys. 1).
Rys. 1. Stanowisko mikrodozowania cieczy: a) w procesie produkcyjnym, b) w laboratorium diagnostycznym Fig. 1. Station for liquid microdispensing: a) in the production process, b) in a diagnostic laboratory 67
a) b) Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 67–77, DOI: 10.14313/PAR_247/67
Celem prezentowanego w artykule projektu było opracowanie założeń do automatycznego prowadzenia procesów mikrodozowania cieczy w inżynierii biomedycznej. Proces ten jest jednym z głównych zadań służących wytwarzaniu produktów farmaceutycznych i pokrewnych, stosowanych w laboratoryjnych badaniach diagnostycznych i badawczych oraz bezpośrednio aplikowanych w leczeniu. Problemem współczesnego mikrodozowania jest osiągnięcie stabilnego, powtarzalnego porcjowania cieczy o objętości rzędu 0,5 μl (w układzie metrycznym jest to objętość 0,5 mm3), w jak najkrótszym czasie i w pełni zautomatyzowanym, programowalnym układzie sterowania stanowiskiem produkcyjnym lub laboratoryjnym.
Projekt był realizowany we współpracy z firmą Festo jako przedmiot pracy magisterskiej, jednocześnie jako część międzynarodowego projektu dotyczącego automatyzacji mikrodozowania cieczy. Prowadzone w nim prace badawcze poświęcone eksperymentalnej i teoretycznej weryfikacji jakości procesów mikrodozowania cieczy przez zautomatyzowane stanowiska dozowania, dotyczyły ciągle jeszcze nierozwiązanych dostatecznie na poziomie praktyki przemysłowej i medycznej, problemów, w tym [17]:
zapewnienia katalogowego dostępu do mechatronicznego mikrodozownika, zapewniającego założone stabilne i powtarzalne porcjowanie cieczy o objętości rzędu 0,5 μl, −zapewnienia wspomnianego stabilnego i powtarzalnego porcjowania cieczy przez dozownik w możliwie najkrótszym, milisekundowym czasie wydzielenia jednej porcji, opracowania teoretycznego modelu mikroprzepływu cieczy przez dozownik, spełniającego wymagania przyjętej a priori procedury automatycznego mikrodozowania, porównania modelu teoretycznego z danymi pochodzącymi z eksperymentalnej weryfikacji zachowań porcjowania cieczy w dostępnych dozownikach, przyjęcia zasady automatycznego i ręcznego (programowalnego) sterowania mikrodozowaniem zapewniającej zarówno przemysłowe (produkcyjne), jak i laboratoryjne (diagnostyczne, badawcze, medyczne) aplikacje dostępnego dozownika, sprawdzenia przyjętej zasady automatycznego sterowania mikrodozowaniem cieczy o różnych właściwościach (lepkość, gęstość, temperatura itp.) oraz w różnych zmieniających się warunkach środowiskowych tych aplikacji.
Wyniki prezentowanej w artykule pracy magisterskiej są unikalne, a opracowane procesy technologiczne innowacyjne na skalę światową. Ze względu na ich charakter są traktowane jako niejawne, a sama praca jest utajniona, w całości znana jedynie promotorowi i recenzentowi.
a)
b)
Rys. 2. Głowica mikrodozownika: a) widok głowicy, b) pojedyncza głowica: 1) igła dozująca, 2) przetwornik elektromechaniczny zaworu, 3) doprowadzenie mikrodozowanej cieczy
Fig. 2. Dispense head: a) view of the head, b) single head: 1) dispense needle, 2) electromechanical valve converter, 3) supply of microdispensing liquid
nych informacji na temat właściwości dozowanej cieczy oraz warunków środowiskowych procesu dozowania, generatora ciśnienia powietrza utrzymującego statyczne ciśnienie mikrodozowanej cieczy w zbiorniku dozownika.
W opisanych badaniach teoretycznej i eksperymentalnej weryfikacji zachowań mikroprzepływów wykorzystano katalogowe dozowniki i ich osprzęt, nie gwarantujące jednak osiągnięcia żądanych mikroobjętości porcjowanej cieczy, np. [18–23].
Typowy katalogowy dozownik zbudowany jest z trzech zespołów:
głowicy z igłą dozującą i elektrozaworem sterującym przepływem doprowadzonej, mikrodozowanej cieczy (Rys. 2).
Zadaniem igły jest ograniczenie natężenia przepływu cieczy i docelowe kierowanie wypływem cieczy. Zadaniem elektrozaworu, membranowego lub suwakowego, zależnie od dozowanej jednostkowo objętości cieczy, jest otwieranie i zamykanie jej przepływu przez głowicę, procesorowego sterownika czasowego procesem mikrodozowania, korzystającego z programu obliczającego czas otwarcia elektrozaworu głowicy dozującej, na podstawie wprowadzo-
Rozwiązania i właściwości głowic dozujących zależą od przyjętych przez producenta obszarów ich aplikacji przemysłowych lub laboratoryjnych, w tym (Tab. 1): od rodzaju i funkcji działania elektrozaworu. Stosowane są miniaturowe, dwudrogowe zawory membranowe i suwakowe, o działaniu normalnie otwartym lub normalnie zamkniętym. Zawory są sterowane przetwornikiem elektromechanicznym powodującym zmianę kształtu membrany lub przemieszczenie suwaka zaworu, sygnałem elektrycznym generowanym przez sterownik dozownika [1, 2], od ciśnienia cieczy dozowanej, wytworzonego przez generator ciśnienia powietrza lub gazu neutralnego względem cieczy dozowanej. Zakres wartości tego ciśnienia, nazywanego operacyjnym, zawiera się najczęściej pomiędzy 0,05 bar i 3 bar, jego przekroczenie prowadzi do uszkodzenia głowicy, od wartości natężenia mikroprzepływu cieczy dozowanej dla maksymalnej wartości ciśnienia operacyjnego dla danego dozownika, od wartości objętości jednej porcji cieczy dozowanej. Zgodnie z założeniami mikrodozowania równej lub mniejszej od 0,5 μl, −od wartości objętości wewnętrznej dozownika, czyli objętości cieczy w dozowniku w warunkach braku mikroprzepływu. Im mniejsza jest objętość wewnętrzna, tym łatwiejsze wypychanie cieczy do dyszy z zamocowaną igłą i również łatwiejsze płukanie głowicy.

Igły dozujące są wykonywane ze stali wysokostopowej, nierdzewnej lub z tytanu, gwarantujących długą żywotność i przede wszystkim możliwość pracy z cieczami agresywnymi. Igły różnią się kształtem, długością, średnicą wewnętrzną i zewnętrzną (Tab. 2). Istotne, dla procesu mikrodozowania, są wewnętrzne średnice igieł – są to wartości od 0,3 mm do 1,2 mm.
Konstrukcja i materiały głowic i igieł dozujących oraz tych części zaworów, które stykają sie z dozowanymi cieczami muszą spełniać normy ISO 13485 [11] oraz ISO 14971 [12] o wyrobach medycznych.
Mikrodozowniki są typowymi produktami mechatronicznymi – są synergiczną kombinacją mechaniki, elektronicznego sterowania i systemowego podejścia do problematyki ich projektowania,
68 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Tab. 1. Parametry techniczne przykładowo wybranej, typowej głowicy dozującej [18] Tab.1. Technical parameters of an exemplified, typical dispensing head [18]
ParametrWartość
Połączenie wyjściowewymienna igła dozująca
Połączenie wejściowe przewód o średnicy zewnętrznej 3 mm
Funkcja zaworu zawór 2/2, normalnie zamknięty, monostabilny
Kierunek przepływuodwracalny, z ograniczeniami
Ciśnienie operacyjne [bar]0,5–2
Średnica wewnętrzna kanału przepływowego [mm]1,2
Objętość wewnętrzna kanału przepływowego [μl]21 – w tym zawór z przyłączami dla cieczy
Natężenie przepływu wody [μl/s] przy
maksymalnej wartości ciśnienia operacyjnego
Czas przełączania zaworu dozownika:
5000
– zamknięcie [ms] 4 4
– otwarcie [ms]
Rodzaj sterowania zaworuelektryczny
Tab.2. Parametry techniczne przykładowo wybranej, typowej igły dozującej [23]
Tab. 2. Technical parameters of an exemplified, typical dispensing needle [23]
ParametrWartość
Średnica zewnętrzna [mm]1,6
Długość [mm]30
Średnica wewnętrzna [mm]0,6
Kształtprosty lub z przewężeniem na wypływie o długości 5 mm i średnicy wewnętrznej 0,3 mm
Normalny przepływ nominalny [l/min]1,38
Temperatura cieczy [°C]5–60
Temperatura otoczenia [°C]5–60
wykonania i aplikacji [2]. To podejście integruje trzy techniki stosowane w każdym dozowniku, wspomnianą mechaniczną oraz pneumatyczną [2, 3, 8] i hydrauliczną [1, 5, 10], nadzorowane procesorowym, programowalnym sterownikiem korzystającym z teoretycznych zależności opisujących mikroprzepływy cieczy oraz wyniki eksperymentalnych badań tych przepływów w modelowych wykonaniach dozowników [17].
W praktyce przemysłowej przyjęto stosowanie dwóch metod automatycznego sterowania procesami porcjowania cieczy. Pierwsza, opracowana jeszcze w latach 80. XX w., wykorzystuje pompy komorowo-wirowe pozwalające odmierzać porcje cieczy mierząc kąt obrotu pompy pracującej w układzie serwomechanizmu elektropneumatycznego [4, 9] lub współcześnie serwomechanizmu elektrycznego. Zastosowanie pomp hydraulicznych [15] wyklucza porcjowanie cieczy zawierających drobiny stałe, np. cząstki owoców w jogurcie, w przemyśle spożywczym. Pompy komorowe, pozwalają porcjować objętości okołolitrowe, nawet ze wspomnianymi drobinami stałymi, nie sprzyjają jednak zdecydowanie dokładności i powtarzalności mikrodozowania. Drugą metodą, którą zaczęto zajmować się
intensywnie na przełomie stuleci, ze względu na potrzeby inżynierii biomedycznej i rozwijającego się przemysłu farmaceutycznego, to sterowanie czasowe, pozwalające przy zachowaniu, jak już wspomniano poprzednio, stabilnego przepływu cieczy oddzielać porcje cieczy rzędu 1 μl, czyli 1 mm3
W tej drugiej metodzie określenia odstępu czasowego między otwarciem i zamknięciem elektrohydraulicznego zaworu porcjującego przepływ, sprzętowo znanego z rozwiązań współczesnej elektrohydrauliki i hydrotroniki [1, 5], dokonuje się w oparciu o teoretyczny model przepływu cieczy hydraulicznych, także powszechnie znany i wykorzystywany w praktyce przemysłowego projektowania urządzeń i maszyn elektrohydraulicznych [1, 10, 16].
Poniżej przedstawiono najważniejsze zależności, zjawiska i współczynniki charakteryzujące wspomniany model przepływu cieczy oraz ich opis dostosowany do mikroprzepływów, wykorzystany w kalkulatorze procesorowego sterownika procesem mikrodozowania [17]:
−równanie ciągłości (równanie zachowania masy)
Qm1 = Qm2, czyli A1 r1u1 = A2 r2u2, (1)
gdzie Qm – masowe natężenie przepływu, u – prędkość przepływu, A – powierzchnie, przez które przepływa ciecz, r – gęstość cieczy (Rys. 3).
69
Rys. 3. Szkic sytuacyjny przepływu cieczy przez objętości wewnętrzne głowicy dozownika i igły dozującej
Fig. 3. A situational sketch of the liquid flow through the internal volumes of the dispensing head and dispensing needle
Jeżeli założyć, że gęstość dozowanej cieczy jest stała, czyli ta ciecz jest nieściśliwa, to oznacza także, że przepływy masowe przez powierzchnie A1 i A2 (Rys. 3) są równe. Nazywane jest to bilansem masowych natężeń przepływu. W stanach nieustalonych, w zależności (1) należy po stronie wypływów dodać wartości natężenia wynikające z gromadzenia (lub oddawania) cieczy w (lub z) objętości kontrolnej R (Rys. 4), spowodowane ściśliwością lub przyleganiem cieczy do ścianek objętości wewnętrznych głowicy dozownika lub tylko objętości wewnętrznej igły dozującej, −zasada zachowania energii (równanie Bernoulliego), w odniesieniu do strumienia cieczy nielepkiej i nieściśliwej, o jednowymiarowym, stacjonarnym przepływie bez strat (to znaczy, że w każdym miejscu prędkość ruchu cieczy pozostaje stała), wyraża się hipotetyczną zależnością
EC = V(rgz + p + ) = const lub
dla r = const gz + p + = const, (2)
gdzie EC – energia całkowita odniesiona do jednostki objętości cieczy, r – gęstość cieczy, g – przyspieszenie grawitacyjne, z – poziom cieczy, p – ciśnienie cieczy, u – prędkość przepływu, V – objętość cieczy w przestrzeni kontrolnej (jak wyżej).
Pierwszy człon zależności (2) odnosi się do energii ciśnienia hydrostatycznego (położenia przepływu), drugi – do energii ciśnienia statycznego, trzeci – do energii ciśnienia dynamicznego. Ciśnienie hydrostatyczne wywierane jest prostopadle do kierunku przepływu, natomiast ciśnienie dynamiczne –równolegle. Skoro ich suma jest stała, oznacza to, że w obszarach większej prędkości przepływu, ciśnienie statyczne będzie mniejsze. Przy pominięciu dodatkowych strat w porównywanych przekrojach, zapewniona ma być równość energii całkowitych (3)
EC1 = EC2, czyli Vrgz1 + Vp1 + V =
= Vrgz2 + Vp2 + V = const. (3)
Przepływ cieczy rzeczywistych generuje jednak wspomniane straty energii (np. z powodu lepkości, także spadku ciśnienia), dlatego po prawej stronie równania dodaje się składnik rekompensujący straty Dps, wtedy p1 + » p2 + (ciśnienie hydrostatyczne jest tu często pomijane, ponieważ jest kilka rzędów wartości mniejsze niż ciśnienia pozostałe). Równanie po odpowiednich przekształceniach wykorzystuje się do obliczenia średniej prędkości strumienia cieczy w danym przekroju przez pomiar różnicy (spadku) ciśnienia w przepływie – może to dotyczyć np. przypadku dozownika ze zwężoną na pewnym odcinku igłą dozującą (Rys. 3, Tab. 2),
objętościowe natężenie przeplywu Q. Przepływ cieczy rzeczywistych generuje straty energii, które pomniejszają końcową energię całkowitą, jednocześnie przekrój strumienia cieczy nie odpowiada geometrycznym wymiarom materialnego przekroju przepływu, przez przyleganie pewnej warstwy cieczy do ścianek objętości wewnętrznych dozownika i igły dozującej (Rys. 4).
Jest to uwzględnione przez współczynnik przepływu Q, który przez wartość a < 1 uwzględnia występowanie wymienionych strat. Niestety, zarówno zjawisko kontrakcji przepływu, jak i te inne straty są w praktyce niemierzalne – trudno jest wyznaczyć wartość każdego czynnika obniżającego energię całkowitą. Z tego powodu współczynnik przepływu musi być przyjęty na podstawie doświadczonych w praktyce wartości, co pozwala na określenie wpływu wszystkich zaburzeń przepływu jednocześnie. Upraszcza to równanie Bernoulliego, wnosząc jednak wyraźne niedokładności tego opisu teoretycznego. Objętościowe natężenie przepływu, z wymienionymi uproszczeniami, można wyrazić następującymi zależnościami
, jeżeli p1 ³ p4 (4)
i ogólnie
, jeżeli A2 ³ 0, (5)
−zasada zachowania pędu masy m strumienia cieczy, poruszającej się z prędkoscią u, równa jest sumie sił działających na układ
, lub , (6)
gdzie F – wypadkowa sił działających na układ, m – masa, u – prędkość poruszającej się masy cieczy, t – czas.
Rys. 4. Szkic sytuacyjny przepływu cieczy przez objętość wewnętrzną igły dozującej: R – powierzchnia wewnętrzna objętości igły, otaczająca rzeczywisty przepływ cieczy, A < A1 – powierzchnia przekroju przepływu wewnątrz igły, l – długość igły dozującej
Fig. 4. A situational sketch of the liquid flow through the internal volume of the dispensing needle: R – internal surface of the needle volume, surrounding the actual liquid flow, A < A1 – cross-sectional area of the flow inside the needle, l – length of the dispensing needle
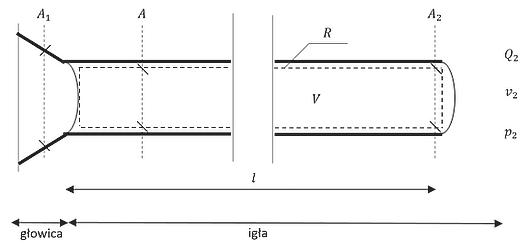
W praktyce hydrauliki konwencjonalnej zasadę zachowania pędu wyraża się zależnością wiążącą wielkości mierzalne w technice płynowej, czyli pochodną po czasie iloczynu m u, przyjmując wspomniany uprzednio uproszczony model powierzchni kontrolnej R, otaczającej rzeczywistą, wewnętrzną część przepływu oraz oddziaływanie tego strumienia z przestrzeni R na otoczenie Po przekształceniach opisu części stacjonarnej i niestacjonarnej przepływu zależność opisującą zasadę zachowania pędu podaje się w następującej postaci [1]
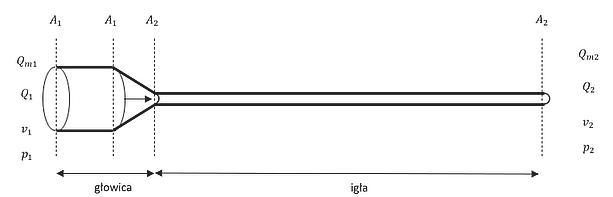
,
70 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
(7)
gdzie – F wypadkowa sił wg (4.7), u – prędkość wg (7), r – gęstość cieczy, Q – objętościowe natężenie przepływu wg (4) i (5), l – długość analizowanego obszaru, w tym przypadku długość igły dozującej. Znak części niestacjonarnej określa pochodna objętościowego natężenia przepływu, natomiast znak części stacjonarnej określa zgodność wektora prędkości z normalną do przepływanej powierzchni – jeśli jest zgodny to wartość wyrażenia jest dodawana, w przeciwnym przypadku ta wartość jest odejmowana, straty hydrauliczne – zależą od rodzaju przepływu, uwarstwionego (laminarnego) lub burzliwego (turbulentnego). Fizycznie, o rodzaju przepływu, decyduje przebieg pojedynczych strug w strumieniu przepływajacej cieczy. Analitycznie, o laminarności lub turbulentności przepływu decyduje liczba Reynoldsa Re,
(8)
gdzie u – średnia prędkość przepływu, n – współczynnik lepkości kinematycznej, d n – tzw. średnica hydrauliczna
wyrażona przez , gdzie A – pole przekroju przewodu,
u – obwód tzw. powierzchni zwilżonej, w omawianym przypadku powierzchni przestrzeni R istniejącego przepływu w igle dozującej (Rys. 4). W pierwszym etapie przepływu cieczy przez dozownik, przed igłą dozującą, można przyjąć, że występuje tu przepływ laminarny, który kształtuje się w pełni na odcinku o długości l l » 0,058dRe, w przypadku prostego i gładkiego odcinka przewodu wewnętrznego dozownika, licząc od miejsca zaistnienia warunków takiego przepływu. Teoretycznie, po przejściu z objętości wewnętrznej dozownika do objętości wewnętrznej igły, po przekroczeniu wartości krytycznej Rekr może nastąpić przejście z przepływu uwarstwionego w burzliwy. Formowanie takiego przepływu turbulentnego odbywa się na odcinku lt » (10; 20)d, czyli w przypadku igły o średnicy wewnętrznej 0,6 mm (Tab. 2), od 6 mm do 12 mm przy długości igły 30 mm. W praktyce konwencjonalnej hydrauliki wartości krytyczne Rekr różnią się w zależności od elementu, przez który następuje przepływ, ze względu na istnienie różnego rodzaju oporów (np. kształtu przewodu), powodujących zawirowania i zmniejszających tę wartość. Dla prostej, gładkiej rury wynosi ona Rekr = 2300, natomiast w różnych elementach urządzeń hydraulicznych zmniejsza się nawet do około 150–300. Dla gładkiej i prostej rury, którą jest igła dozująca, można jednak przyjąć, że przepływ burzliwy w ogóle nie wystąpi, tym bardziej, że średnica wewnętrzna przepływu w głowicy dozownika jest kilkakrotnie większa od średnicy wewnętrznej igły dozującej, straty mocy strumienia cieczy powstające przy przepływie dzieli się na straty liniowe (przepływ przez odcinki proste) i straty miejscowe (przepływ przez zakrzywienia, przewężenia). Jeśli w układzie następuje szeregowo po sobie kilka oporów hydraulicznych, które powodują spadek ciśnienia, wtedy stracona moc wyraża się zależnością
prędkość przepływu. Współczynnik l jest zależny od liczby Reynoldsa, l= Re(l). Im większa chropowatość wewnętrznej ściany przewodu, tym większa wartość współczynnika. W praktyce przyjmuje się w przybliżeniu:
dla Re < 2000 (11)
lub l = 0,025 dla Re > 2000.
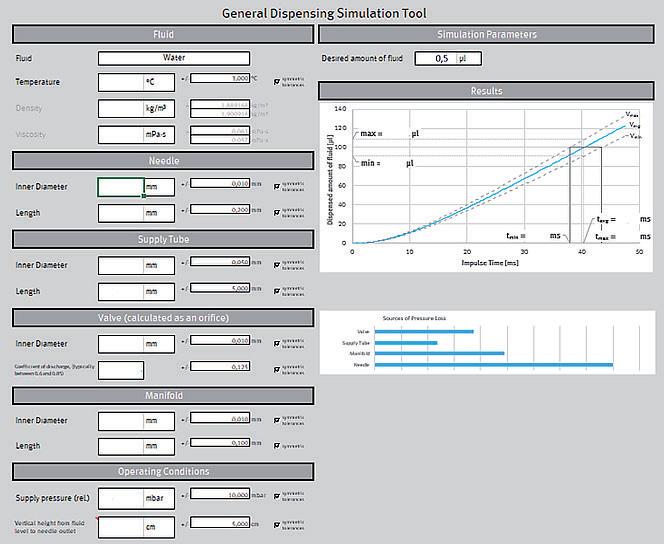
Miejscowe straty ciśnienia Dpm, w obszarach lokalnych zaburzeń przepływu (zmiany kierunku lub prędkości), wyrażają się zależnością
Dpm = , (12)
gdzie x – współczynnik strat miejscowych, r – gęstość cieczy, u – średnia prędkość przepływu. Współczynnik strat miejscowych przyjmuje się jako stały, a jego wartość jest różna w zależności od rodzaju napotkanego oporu, opory liniowe – grupa oporów charakteryzująca się natężeniem przepływu wprost proporcjonalnego do spadku ciśnienia. W omawianym rozwiązaniu dozownika i igły dozującej, zachowania występującego przepływu (jak wyżej to już sformułowano) można opisać zależnością opisującą zachowania przepływów kapilarnych, na przykład dla igły dozującej
gdzie Q – objętościowe natężenie przepływu, p1– ciśnienie na wejściu do kapilary, p2 – ciśnienie na wyjściu z kapilary, d –średnica kapilary, l – długość kapilary (Rys. 3 i 4).
Z wykorzystaniem podanych zależności teoretycznych opracowany został wspomniany już kalkulator procesorowego sterownika czasem otwarcia przepływu dozowanej cieczy (Rys. 5). W programie kalkulatora uwzględniono następujące parametry, ich zakresy wartości i tolerancje – dotyczące: −mikrodozowanej cieczy: temperatura, gęstość i lepkość, −igły dozującej: średnica wewnętrzna i długość,
gdzie P st – moc stracona, Q – objętościowe natężenie przepływu cieczy, Dpi – spadek ciśnienia. Utracona moc zamieniana jest na ciepło.
Liniowe straty ciśnienia wyrażają się zależnością
(10)
gdzie l – współczynnik strat liniowych, l – długość rury, d – średnica wewnętrzna, r – gęstość cieczy, u – średnia
,
(9)
,
,
(13)
71
Rys. 5. Zrzut ekranu interfejsu kalkulatora procesorowego sterownika czasowego procesu mikrodozowania cieczy o przykładowo zadanej objętości Fig. 5. The interface screenshot of the developed calculator returning the theoretical valve opening time in order to obtain, for example, a given volume of liquid
przewodu doprowadzającego ciecz do dozownika: średnica wewnętrzna i działanie zaworu traktowane jako działanie przykładowej kryzy w przewodzie, zaworu otwierającego/zamykającego przepływ cieczy w głowicy dozownika: zawór traktowany jak kryza (współczynnik dławienia w trakcie przepływu) i średnica wewnętrzna, kolektora przepływu wewnątrz głowicy dozownika: średnica wewnętrzna i długość, parametrów operacyjnych: ciśnienie powietrza wypychające ciecz z pojemnika, wytwarzane przez generator lub zespół przygotowamia powietrza z zaworem bezpieczeństwa.
Kalkulator, na podstawie wymienionych informacji, powiązanych podanymi zależnościami, oblicza i prezentuje wykres, pozwalający określić minimalny, średni i maksymalny czas otwarcia zaworu, mający zapewnić żądaną objętość mikrodozowanej cieczy [17]. Dodatkowo generowany jest wykres słupkowy obrazujący wielkość wpływu na wynik dozowania czterech głównych zespołów dozownika, tzn. dozowanej objętości, przewodu doprowadzającego ciecz do głowicy, kolektora i zaworu w głowicy oraz igły dozującej. Ma to służyć dodatkową (częściowo intuicyjną) pomocą operatorowi w wyborze konkretnych parametrów określających działanie dozownika.
się zaburzeń i generowanych strat, co musi rzutować na znaczne rozbieżności pomiędzy oczekiwanymi i uzyskiwanymi wynikami.
Ten sposób prowadzenia procesu mikrodozowania, dotycząc zjawisk dziejących się docelowo w procesach biomedycznych, szczególnie waży w procedurach wytwarzania farmaceutyków i produktów pokrewnych oraz bezpośrednio w medycynie diagnostycznej i leczniczej. Niedokładności, szczególnie brak powtarzalności mikrodozowanych porcji cieczy, są w tych procesach, w stosunku do wartości założonych porcji całkowicie nie akceptowalne [11–13]. Konieczna staje się więc eksperymentalna weryfikacja zachowań procesu mikrodozowania prowadzonego z użyciem dostępnego sprzętu i mediów, w tym konkretnej dozowanej cieczy oraz warunków środowiskowych prowadzenia tego procesu. Dopiero te doświadczalnie określone wartości mogą być wykorzystane w kalkulatorze procesorowego sterownika czasowego procesem mikrodozowania [17].
Biorąc pod uwagę opisany w poprzednim rozdziale sposób nastawiania czasu dla uzyskania żądanej objętości mikrodozowanej cieczy można przyjąć, że odnosząc się do teoretycznych zależności i silnie intuicyjnego wyboru wartości tego czasu, nie gwarantuje on uzyskania stabilnego i powtarzalnego wyniku dla założonych mikroobjętości cieczy. Nieznane są dokładne wartości współczynników charakteryzujących te ciecze i ich przepływy w konkretnym sprzęcie składającym się na istniejący rzeczywiście dozownik oraz wartości tworzących

Metodykę badań eksperymentalnych zaplanowano zgodnie z zasadami podanymi w normie PN-EN ISO/17025 [13]. Określono, jakie parametry mają zostać poddane analizie ich wartości oraz jaka powinna być liczba punktów pomiarowych dla każdego parametru. Dobrano wspomniane parametry tak, by zbudować niemal uniwersalny zestaw odpowiadający możliwościom technicznym każdego testowanego dozownika. Dzięki temu możliwe jest porównanie wyników testów w takich samych punktach pomiarowych. Podstawowy zestaw parametrów, ich wartości lub ich modyfikacji podzielono na dwie grupy: o wartościach stałych i wartościach zmiennych, w zależności od rodzaju głowicy dozownika i osprzętu towarzyszącego.
Określono, że miarą oceny zachowania cieczy podczas jej mikroprzepływów ma być objętość mikrodozowanych porcji (nazywanych także dozami), czas potrzebny na otrzymanie zadanej objętości oraz ocena wizualna obejmująca między innymi obserwację rozbryzgów i tworzenia się kropli. Przyjęto założenie, że najczęściej zmienianym się parametrem było ciśnienie operacyjne cieczy, powiązane z ciśnieniem powietrza a najrzadziej lepkość wybranej cieczy.
7) przewód doprowadzający ciecz do dozownika, 8) przewód doprowadzający powietrze do pojemnika z cieczą, 9) generator ciśnienia powietrza, 10) jonizator powietrza, 11) ścianki stanowiska zapewniające stabilne warunki środowiskowe, 12) komputer stanowiska
Fig. 6. Measuring station for the experimental verification of the quality of microdispensing of liquids: 1) digital analytical balance, 2) granite base plate of the balance, 3) microflow dispenser, 4) ionizer power supply, 5) hygrometer, 6) glass container of the tested liquid, with supplied air forcing the flow pressure, 7) liquid supply line to the dispenser, 8) air supply line to the liquid container, 9) air pressure generator, 10) air ionizer, 11) station walls ensuring stable environmental conditions, 12) station computer
 Rys. 6. Stanowisko pomiarowe eksperymentalnej weryfikacji jakości mikrodozowania cieczy: 1) cyfrowa waga analityczna, 2) granitowa płyta podstawy wagi, 3) dozownik mikroprzepływu, 4) zasilacz jonizatora , 5) higrometr, 6) szklany pojemnik badanej cieczy, z doprowadzonym powietrzem wymuszającym ciśnienie przepływu,
Rys. 6. Stanowisko pomiarowe eksperymentalnej weryfikacji jakości mikrodozowania cieczy: 1) cyfrowa waga analityczna, 2) granitowa płyta podstawy wagi, 3) dozownik mikroprzepływu, 4) zasilacz jonizatora , 5) higrometr, 6) szklany pojemnik badanej cieczy, z doprowadzonym powietrzem wymuszającym ciśnienie przepływu,
72 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
zmienności CV (wykres górny) oraz średnia arytmetyczna objętości dozy (wykres dolny), zależne od ciśnienia operacyjnego, dla stałych czasów otwarcia, dla igły o średnicy wewnętrznej 0,6 mm i długości 30 mm oraz oleju silikonowego o lepkości 1 cSt i gęstości 0,816 g/cm3
Fig. 7. Coefficient of variation CV (upper diagram) and arithmetic mean of the dose (lower diagram), depending on the operating pressure, for constant opening times for a needle with an internal diameter of 0.6 mm and 30 mm long and for silicone oil with a viscosity of 1 cSt and a density of 0.816 g/cm3
zmienności CV (wykres górny) oraz średnia arytmetyczna objętości dozy (wykres dolny) zależne od ciśnienia operacyjnego, dla stałych czasów otwarcia, dla igły o średnicy wewnętrznej 0,6 m i długości 30 mm oraz oleju silikonowego o lepkości 20 cSt i gęstości 0,955 g/cm3
Fig. 8. Coefficient of variation CV (upper diagram) and arithmetic mean of the dose volume (lower diagram), depending on the operating pressure, for constant opening times, for a needle with an internal diameter of 0.6 mm and a length of 30 mm and silicone oil with a viscosity of 20 cSt and a density of 0.955 g/cm3
Rys. 7. Współczynnik
Rys. 8. Współczynnik
73
W zestawionym stanowisku pomiarowym (Rys. 6) mikrodozowano kolejne porcje cieczy do szklanego naczynia znajdującego się na talerzu cyfrowej wagi analitycznej o dokładności ważenia 10-5 g. Pojedyncza seria danych składa się z 30 mikrodozowanych porcji. Wyniki ich ważenia zapisuje się do cyfrowego arkusza kalkulacyjnego, w którym znajduje się również opis testu: numer, data, temperatura, wilgotność powietrza, temperatura powietrza, dozownik wraz z osprzętem, rodzaj igły, rodzaj cieczy i jej lepkość i ciśnienie oraz czas otwarcia przepływu. Na podstawie zebranych danych, określano wartość minimalną, wartość maksymalną, średnią arytmetyczną oraz współczynnik zmienności pomiarów CV (ang. Coefficient of Variation). Dla obliczenia tego współczynnika wybrano wyrażenie [17]
CV = 100 %, (14)
gdzie s odchylenie standardowe, – średnia arytmetyczna danej serii pomiarów.
Proces mikrodozowania rozpoczyna się w momencie wytworzenia ciśnienia powietrza operacyjnego przez generator ciśnienia lub zespół przygotowania powietrza w warunkach dostępu do sieci sprężonego powietrza. Sprężone powietrze doprowadzone jest przewodem do zbiornika z dozowaną cieczą i napierając na nią w zbiorniku, wypycha ją przez drugi przewód, zanurzony w cieczy w zbiorniku i doprowadza ją do sterowanej elektronicznie głowicy dozującej. Dla kontroli ciśnienia operacyjnego (od 50 do 3000 mbar) oraz poprawności działania systemu sprężonego powietrza zainstalowano w stanowisku dwa sensory: wartości ciśnienia operacyjnego i przepływu powietrza do zbiornika z dozowana cieczą (Rys. 6).
Ze względu na wykorzystanie pomiaru masy mikrodozowanej porcji cieczy (Qm), jej objętość (Q) liczono następującą zależnością , (15)
gdzie K u – współczynnik przepływu [m3/h], D p – spadek ciśnienia w barach, r – gęstość cieczy [kg/m3].
Obszerność wykonanych i prowadzonych nadal badań eksperymentalnych i ich analizy [17], skłoniła autorów do przedstawienia tylko skąpo wybranych informacji z czterech grup tych badań i analiz, które wydają się być najbardziej istotnymi dla zachowania mikroprzepływów i jakości mikrodozowania cieczy: badań związanych z wpływem ciśnienia operacyjnego. Konstrukcja głowicy pozwala na przyłożenie ciśnienia z zakresu 0–500 mbar. Testy wykonano dla trzech ciśnień o wartościach 50 mbar, 250 mbar oraz 500 mbar, trzech czasów otwarcia o długości 50 ms, 150 ms i 300 ms oraz pozosta-
łych, stałych parametrów procesu dozowania (rodzaj cieczy, wypełnienie butli z cieczą i rodzaj igły) (Rys. 7, Rys. 8), −badań związanych z zachowaniem progu ciśnienia, po którym następuje zmiana sposobu przepływu cieczy. W przypadku stopniowego obniżania ciśnienia, z obszaru przepływu strumieniowego do obszaru przepływu kroplowego, wartość progu jest niższa niż w przeciwnym kierunku. Wynika to z faktu, że ciecz pozostaje w swoim stanie jak najdłużej, jeśli sprzyjają ku temu warunki. Z tego powodu ciecz pozostaje w przepływie kroplowym lub strumieniowym tak długo, jak to jest możliwe. W związku z tym wartość, po przekroczeniu której zmienia się postać przepływu, jest zmienna (Rys. 9), −badań różnic między czasem otwarcia zaworu ustawionym doświadczalnie za pomocą odpowiedniego oprogramowania a czasem otwarcia zwróconym przez kalkulator dla tych samych mikrodozowanych objętości. Obserwuje się znaczne rozbieżności między tymi dwoma wartościami, które wskazują na konieczność prowadzenia badań w celu doświadczalnego wyznaczenia faktycznych współczynników opisujących mikroprzepływy przez dozownik. Występujące różnice mogą wynikać z wielu czynników, których wpływ nie jest obserwowany przy większych przepływach, np. zwężenie średnicy przepływu przez nieruchomą warstwę cieczy wynikającą z przyciągania międzycząsteczkowego (Rys. 10), badań związanych z poziomem wypełnienia zbiornika z cieczą. Testy wykonywano dla trzech poziomów wypełnienia: 200 ml, 500 ml i 900 ml. Zaobserwowano m.in. wpływ działania poduszki powietrznej, absorbującej wahania ciśnienia doprowadzonego do zbiornika, na wysokość współczynnika zmienności CV oraz wpływ działania ciśnienia hydrostatycznego na masę wydozowanych porcji (Rys. 11, Rys. 12).
Rys. 9. Zachowanie progu wartości ciśnienia pomiędzy przepływem strumieniowym a kroplowym dla oleju silikonowego o lepkości 20 cSt i igły o średnicy wewnętrznej 0,6 mm i długości 30 mm Fig. 9. Maintaining the pressure threshold between stream and drop flow for silicone oil with a viscosity of 20 cSt and needle with an internal diameter of 0.6 mm and a length of 30 mm

Prowadzone w opisanym projekcie badania nad mikroprzepływami wybranych cieczy umożliwiły określenie rozbieżności między znanymi w elektrohydraulice i hydrotronice formułami teoretycznymi i ich modelami a obserwowanymi w praktyce zjawiskami mikroprzepływu tych cieczy przez przebadane głowice i igły dozowników.
W badaniach zostały użyte ciecze o ściśle określonych właściwościach oraz uwzględnione zmienne parametry sprzętowe i środowiskowe wpływające na ich przepływy. Założeniem tych badań było osiągnięcie stabilnego i powtarzalnego mikrodozowania porcji tych cieczy o objętości 0,5 μl. Metodyka badań objęła serię eksperymentów porównawczych, które pozwoliły określić wpływ wartości wybranych i pomierzonych parametrów, wprowadzanych następnie do kalkulatora procesorowego sterownika czasowego procesem mikrodozowania. Na podstawie wyników możliwe było określenie różnic wynikających z konstrukcji głowic oraz sprawdzenie powtarzalności obserwowanych wcześniej zjawisk w trakcie korzystania z teoretycznego modelu opisującego przepływy cieczy dla czasowego sterowania procesem mikrodozowania.
Najbardziej istotnymi obserwacjami dla jakości mikropozycjonowania cieczy okazały się [17]: niezgodność dozowanej objętości cieczy, nastawionej przez czas otwarcia przepływu za pomocą oprogramowania uwzględniającego wyniki badań eksperymentalnych, z objętością nastawioną przez oprogramowanie kalkulacyjne, korzystające z podanych zależności teoretycznych, także, spodziewaną z powyższych względów, niezgodność dwóch czasów otwarcia przepływu dla tej samej żądanej objętości jednej porcji cieczy, nastawianych zależnościami modelu teoretycznego i modelu wynikającego z badań eksperymentalnych,
74 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 10. Porównanie pomiędzy czasem otwarcia przepływu przez dozownik ustawionym doświadczalnie (żółty wykres liniowy) a czasem otwarcia zwróconym przez kalkulator (czerwony wykres kolumnowy) dla oleju silikonowego 20 cSt, igły dozującej o średnicy 0,6 mm i czasu otwarcia równego 50 ms
Fig. 10. Comparison between the opening time of the flow through the dispenser set experimentally (yellow line graph) and the opening time returned by the calculator (red bar graph) for 20 cSt silicone oil, a dispensing needle with a diameter of 0.6 mm and an opening time of 50 ms
Rys. 11. Różnice między wartościami współczynnika CV pomiędzy różnymi poziomami wypełnienia zbiornika dla oleju silikonowego o lepkości 1 cSt, igły dozującej o średnicy wewnętrznej 0,6 mm oraz zmiennego czasu otwarcia
Fig. 11. Differences between the values of the CV coefficient between different fill levels of the tank for silicone oil with a viscosity of 1 cSt, a dispensing needle with an internal diameter of 0.6 mm and a variable opening time
Rys. 12. Różnice w ilości mikrodozowanej cieczy pomiędzy różnymi poziomami wypełnienia zbiornika dla oleju silikonowego o lepkości 1 cSt, zwężonej igły dozującej o średnicy wewnętrznej 0,3 mm oraz zmiennego czasu otwarcia
Fig. 12. Differences in the amount of microdosed liquid between different tank fill levels for 1 cSt silicone oil, 0.3 mm ID tapered dispensing needle, and variable open time
ekspotencjalny wzrost mikrodozowanej objętości cieczy w miarę wzrostu ciśnienia wypychającego ciecze o dużej lepkości. Zjawisko jest ciekawe ze względu na niezgodność charakteru tego wzrostu z modelem teoretycznym, zakładającym jego pierwiastkowy przebieg, występowanie tym większego gradientu opisanego wyżej ekspotencjalnego charakteru wzrostu mikrodozowanej objętości cieczy, im większa jest średnica wewnętrzna igły dozującej, brak formowania strumienia cieczy, przy małej wartości jej ciśnienia. Obserwowany jest tu mikroprzepływ w formie spadających po sobie kropel – kolejne otwarcia przepływu nie formują porcji o żądanej objętości, a jedynie zasilają tworzącą
się wokół wyjścia wypływu z igły kroplę (Rys. 13), która po osiągnięciu odpowiedniej masy spada, −tłumaczące podane wyżej obserwacje, zjawisko zmniejszania średnicy powierzchni mikroprzepływu cieczy, wywołane prawdopodobnie przez nieruchomą, przylegajacą do ścianek igły dozującej, warstwę cieczy powstająca na skutek przyciągania międzycząsteczkowego na granicy ścianek igły i wypełniającej ją cieczy. Zjawisko może mieć szczególne znaczenie w przypadku igieł dozujących o bardzo małej średnicy wewnętrznej, np. przewężenia na wypływie o długości 5 mm i średnicy wewnętrznej 0,3 mm w przypadku igły opisanej w Tab. 2. Konieczne jest tu przeprowadzenie dodatkowych badań eksperymentalnych dla określenia grubości tej nieruchomej warstwy
75
cieczy – nie jest możliwe określenie tej wartości, odnosząc się jedynie do teoretycznych zależności i dostępnej wiedzy.
Zebrane dane i wiedza wynikająca z przeprowadzonych badań pozwalają na dobranie najbardziej optymalnych nastaw dla szerokiego zakresu wartości objętości mikrodozowanej cieczy, gwarantując najlepszą powtarzalność i najniższy współczynnik zmienności CV zarówno w obrębie jednej serii mikrodozowań, jak i między seriami wykonanymi w odmiennych warunkach środowiskowych. Na rozwiązanie problemów mikrodozowania oczekują pilnie wytwórcy współczesnych farmaceutyków i laboratoria diagnostyczne i badawcze – świadczą o tym już zrealizowane pomyślnie w praktyce przemysłowej w 2022 r., korzystające z opisanych wyników badań, mikrodozowania objętości nawet mniejszych niż założone, np. 0,4 μl.
Ze względu na wymóg nieujawniania pełnych wyników prezentowanej pracy, osiągnięte rezultaty praktyczne, będące efektem licznych eksperymentów, badań i pomiarów oraz ich złożonej analizy, zostały zaprezentowane w sposób okrojony. Wdrożeniowy charakter pracy jest poprzedzony częścią teoretyczną, eksperymentalną i analityczną. Wynik jest w pełni unikalny, a proponowane rozwiązanie technologiczne innowacyjne. Niewykluczone jest opatentowanie rozwiązania przez zleceniodawcę badań.
Szczególną wartością artykułu jest zgromadzenie informacji praktycznych, danych stosowanych urządzeń i podstaw teoretycznych. Nawet w tak okrojonej postaci stanowić mogą podstawę dalszych prac, zarówno inżynierskich, jak i naukowych.
4. Olszewski M., Garbarczyk B., Auslegung und Erprobung eines servopneumatischen Antriebes für eine Abfüllpumpe. Inst. für Hydraul. und Pneum. Antriebe und Steuerungen der RWTH Aachen, Forschungsbericht 1987.
5. Olszewski M., Hydraulika. Aktuatoryka hydrauliczna i elektrohydrauliczna. „Automatyka“, 4(12), 2020, 79-92.
6. Olszewski M., Mechatronika. „Automatyka“, 2(1–2), 2018, 97–99.
7. Olszewski M., Mechatronizacja produktu i produkcji–Przemysł 4.0. „Pomiary Automatyka Robotyka”, Vol. 20, No. 3, 2016, 13-28.
8. Olszewski M., Pneumatyka. Cyfryzacja aktuatoryki pneumatycznej. „Automatyka“, 4(5-6), 2020, 135–149.
9. Olszewski M., Sterowanie pozycyjne pneumatycznego napędu siłownikowego. Oficyna Wyd. Politechniki Warszawskiej, Warszawa 2002.
10. Pizoń A., Elektrohydrauliczne urządzenia automatyki. Cz. I-II. Wyd. Politechniki Krakowskiej, Kraków 1992.
11. PN-EN ISO 13485:2016-04, Wyroby medyczne. Systemy zarządzania jakością. Wymagania do celów przepisowych prawnych. Polski Komitet Normalizacyjny, 2016.
12. PN-EN ISO 14971:2020-05, Wyroby medyczne. Zastosowanie zarządzania ryzykiem do wyrobów medycznych. Polski Komitet Normalizacyjny, 2020.
13. PN-EN ISO/IEC 17025:2018-2, Ogólne wymagania dotyczące kompetencji laboratoriów badawczych i wzorcujących. Polski Komitet Normalizacyjny, 2018.
14. Stoll W., Bionik. Lernen von der Natur – Impulse für Innovation. Edition Festo, Esslingen 2018.
15. Stryczek J., Fundamentals of Designing Hydraulic Gear Machines. Wyd. Naukowe PWN, Warszawa 2020.
16. Stryczek S., Napęd hydrostatyczny t. 1 i 2. WNT, Warszawa 2005.
17. Woźniak K., Eksperymentalna i teoretyczna weryfikacja sterowanych procesów mikrodozowania w inżynierii biomedycznej. Praca dyplomowa magisterska (promotor M. Olszewski). Politechnika Warszawska, Warszawa 2022.
18. https://www.festo.de – Festo SE & Co. KG., Dispense Head VTOE, 04/2022.
19. https://www.festo.de – Festo SE & Co. KG., Media Separated Solenoid Valves VYKA, 06/2022.

20. https://www.festo.de – Festo SE & Co. KG., Pressure and Vacuum Generator PGVA, 06/2021.
21. https://www.festo.de – Festo SE & Co. KG., Fitting NLFA, 12/2021.
22. https://www.festo.com.pl/pl/app/customer/account – Festo Polska Sp. z o.o., Komponenty dla technologii medycznej i automatyzacji prac laboratoryjnych. LifeTech, 135890 pl2019/10.
23. https://www.festo.com.pl/pl/app/customer/account – Festo Polska Sp. z o.o., Zestaw igieł dozujących VAVN-N-A1.6-0630-V1-P10, Karta danych. 2022.
1. Helduser S., Mednis W., Olszewski M., Elementy i układy hydrauliczne. Oficyna Wyd. Politechniki Warszawskiej, Warszawa 2009.
2. Olszewski M., Barczyk J., Bartyś M., Kościelny W.J., Mednis W., Sierota A., Szaciłło-Kosowski J., Podstawy mechatroniki (podręcznik opracowany pod kierunkiem Mariusza Olszewskiego). Wyd. REA, Warszawa 2006.
3. Olszewski M., Basics of Servopneumatics. VDI Verlag, Düsseldorf 2007.
76 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 13. Kropla (1) oleju silikonowego o lepkości 20 cSt tworząca się na wypływie cieczy z igły dozującej (2) Fig. 13. A drop (1) of silicone oil with a viscosity of 20 cSt formed on the outflow of the liquid from the dispense needle (2)
The aim of the project described in the article was to develop assumptions for the automatic management of liquid microdosing processes with a volume of 0.5 μl in biomedical engineering. The structure of typical, catalog dispensers selected for testing, which does not guarantee the achievement of the volume of the mentioned portion of liquid, is presented. A set of the most important dependencies, phenomena and coefficients characterizing liquid microflows and their record, used in the calculator of the processor controller for the automated microdosing process, was given. The construction of a micro-dosing process measuring station, allowing for experimental verification of the quality of micro-dosing of liquids with the use of typical dispensers, developed dependencies and a processor controller of this process, was described by tested dispenser heads and the results of automated microportioning, meeting all the given assumptions of this process.
Keywords
ORCID: 0000-0003-0379-171X

ORCID: 0000-0003-3516-2942
77
78 NR 3/2015 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Streszczenie: W pracy zaproponowano wykorzystanie kamery zdarzeniowej jako komponentu systemu wizyjnego umożliwiającego zliczanie szybko przemieszczających się obiektów – w tym przypadku spadających ziaren kukurydzy. Kamery te przesyłają informacje o zmianach jasności poszczególnych pikseli i charakteryzują się niską latencją, brakiem rozmycia związanego z ruchem, poprawnym działaniem w różnych warunkach oświetleniowych, a także bardzo niskim zużyciem energii. Zaproponowany algorytm zliczający analizuje zdarzenia w czasie rzeczywistym. Działanie rozwiązania zademonstrowano na stanowisku składającym się ze zsypu z podajnikiem wibracyjnym, który umożliwiał regulację liczby spadających ziaren. Celem układu sterowania z regulatorem PID było utrzymanie stałej średniej liczby spadających obiektów. Zaproponowane rozwiązanie poddane zostało szeregowi testów, mających na celu określenie poprawności działania opracowanej metody. Na ich podstawie można potwierdzić słuszność użycia kamery zdarzeniowej do liczenia małych, szybko poruszających się obiektów, i związanego z tym szerokiego spektrum potencjalnych zastosowań przemysłowych.
1. Wprowadzenie
Zliczanie obiektów ma wiele praktycznych zastosowań. Może zostać wykorzystane na liniach produkcyjnych jako komponent systemu porcjowania i pakowania. Przykładem może być sprawdzanie liczby tabletek, które mają być umieszczone w opakowaniach lub nakrętek, które powinny zostać dołączone do sprzedawanego produktu. Systemy takie zazwyczaj muszą być zdolne do zliczania małych obiektów, które poruszają się z dużą szybkością. Jednym z możliwych rozwiązań tego problemu jest wykorzystanie systemu wizyjnego, tj. zastosowanie kamery skierowanej na zliczane obiekty. Informacja wizyjna zwykle pozwala na precyzyjne zliczanie poruszających się obiektów. Algorytmy przetwarzające te dane mogą jednak zwracać nieprawidłowe wyniki w sytuacji, kiedy obiekty na obrazie wzajemnie się przesłaniają. Innym ograniczeniem rozwiązania wizyjnego jest niska częstotliwość akwizycji, co w przypadku dużej szybkości zliczanych obiektów powoduje rozmazywanie obrazu. Zmniejszanie prędkości zliczanych obiek-
tów czasami nie jest możliwe lub w przypadku linii produkcyjnej może wiązać się ze spadkiem produktywności.
Czujnikami wizyjnymi, które dobrze radzą sobie z obserwacją szybko poruszających się obiektów, są kamery zdarzeniowe (ang. event camera), określane też DVS (ang. Dynamic Vision Sensor – dynamiczny czujnik wizyjny). Ich działanie wzorowane jest na ludzkim oku. Zamiast przechwytywać obraz co ustaloną jednostkę czasu, każdy piksel działa niezależnie od reszty i w ciągły sposób reaguje na zmianę natężenia rejestrowanego światła. Jeśli taka zmiana zostaje wykryta, to generowane jest tak zwane zdarzenie (ang. event), które składa się z czterech informacji. Pierwszą z nich jest znacznik czasowy. Określa on moment, w którym nastąpiła zmiana. W najnowszych czujnikach jego dokładność wynosi 1 μs [1]. Kolejnymi składowymi są współrzędne piksela na matrycy (odpowiednio x oraz y). Ostatnim elementem jest polaryzacja. Określa ona, czy natężenie światła padającego na dany piksel wzrosło lub zmalało.
Choć technologia jest stosunkowo młoda (pierwsza komercyjnie dostępna kamera została zaprezentowana w 2008 r. [2]), to cieszy się dużym zainteresowaniem. Wiodącymi liderami w branży kamer zdarzeniowych są korporacje Samsung, iniVation oraz Prophesee.
Czujniki zdarzeniowe cechują się szeregiem zalet względem swoich tradycyjnych odpowiedników, które sekwencyjnie wysyłają piksele należące do całej ramki obrazu. Mają bardzo wysoką rozdzielczość czasową. Monitorowanie jasności pikseli jest szybkie dzięki zastosowaniu układu analogowego. Natomiast sam odczyt zdarzenia jest cyfrowy. Częstotliwość zegara odczytu zależy od modelu kamery, ale w przypadku najnowszych czujników wynosi 1 MHz. Oznacza to, że zdarzenia są wykrywane
79 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 79–84, DOI: 10.14313/PAR_247/79
i oznaczane czasem z mikrosekundową rozdzielczością. Dzięki temu urządzenia te mogą rejestrować bardzo szybki ruch bez rozmycia, co jest typowym problemem w przypadku tradycyjnych kamer klatkowych [3]. Czujniki DVS charakteryzują się również dość niską latencją. Dzięki niezależnej pracy każdego piksela nie trzeba czekać na zebranie i przesłanie całej ramki obrazu. Zdarzenia mogą zostać wysłane natychmiast po wykryciu zmiany. Latencja wynosi zwykle około 100 μs dla nowoczesnych czujników. Dzięki temu, że przesyłane są tylko zmiany jasności, nie ma nadmiarowych danych. Moc jest wykorzystywana tylko do przetwarzania pikseli, które uległy zmianie. Efektem tego jest bardzo niski średni pobór mocy matrycy (około 50 mW) i znacznie niższy średni pobór mocy całego systemu. Dzięki temu rozwiązania wykorzystujące kamery zdarzeniowe są potencjalnie bardzo wydajne i oszczędne energetycznie. Kamery te charakteryzują się też znacznie szerszą rozpiętością tonalną, która wynosi powyżej 120 dB. Znacznie przewyższają one nawet wysokiej jakości kamery klatkowe, których dynamika wynosi zazwyczaj około 60 dB. Uzyskuje się ją dzięki temu, że fotoreceptory pikseli pracują w skali logarytmicznej i każdy z nich działa niezależnie. Podobnie jak ludzkie oczy, DVS potrafi dostosować się do bardzo ciemnych i bardzo jasnych scen.
Stosowanie kamer zdarzeniowych wiąże się nie tylko z korzyściami, ale również wyzwaniami wynikającymi z nowatorskich metod przetwarzania i analizy danych. Po pierwsze, należy zaprojektować system przetwarzania czasoprzestrzennej informacji wizualnej, która przyjmuje postać rzadkiej chmury punktów. Zdarzenia mają bardzo wysoką rozdzielczość czasową, ale są przestrzennie rozproszone. Standardowy strumień wideo ma z kolei niską rozdzielczość czasową, ale gęstą informację przestrzenną. Z tego powodu algorytmy wizyjne zaprojektowane dla obrazów nie mają zastosowania do danych zdarzeniowych.
Po drugie, typowe algorytmy przetwarzania obrazów są zaprojektowane do przetwarzania wartości bezwzględnej pikseli. DVS dostarcza jedynie binarnej informacji o zmianie jasności – jej wzroście lub spadku. Zmiana taka może być wynikiem zmiany oświetlenia sceny, ruchu obiektów lub ruchu samej kamery. Co więcej, obecnie dostępne czujniki zdarzeniowe charakteryzują się stosunkowo dużym poziomem szumów [4]. Wymusza to zastosowanie filtracji, która musi uwzględniać zarówno pozycję, jak i znaczniki czasowe strumienia zdarzeń. Technologią konkurencyjną wobec dynamicznych czujników wizyjnych w rozważanej aplikacji mogą być tradycyjne kamery o wysokiej częstotliwości. Jednak nawet najszybsze kamery klatkowe cechują się mniejszą rozdzielczością czasową, działają tylko w bardzo dobrych warunkach oświetleniowych, a ich ceny są znacznie wyższe niż kamer zdarzeniowych. Oprócz tego obraz z takich kamer mógłby być rozmyty w przypadku obiektów poruszających się z dużą szybkością, co z kolei mogłoby się wiązać z koniecznością wykorzystania jeszcze droższego rozwiązania o wyższej częstotliwości.
W pracy zaproponowano algorytm pozwalający na zliczanie szybko poruszających się obiektów z wykorzystaniem kamery zdarzeniowej. Założono, że obiekty spadają, tj. poruszają się w jednym kierunku wzdłuż pola widzenia czujnika. Działanie rozwiązania zademonstrowano na stanowisku składającym się ze zsypu z podajnikiem wibracyjnym, który umożliwiał regulację liczby spadających ziaren kukurydzy. Celem układu sterowania z regulatorem PID (ang. Proportional Integral Derivative) było utrzymanie stałej średniej liczby spadających obiektów. Zaproponowane rozwiązanie poddano szeregowi testów, mających na celu określenie poprawności działania opracowanej metody. Wyniki uzyskane we wszystkich testach były bardzo zbliżone do wartości referencyjnych, a układ automatycznej regulacji działał prawidłowo, utrzymując stały przepływ ziaren w czasie. Algorytm działał na procesorze typowego komputera PC w czasie rzeczywistym – szczegóły opisano na końcu rozdziału 3.1. Na podstawie wyżej wymienionych cech
można potwierdzić słuszność użycia kamery zdarzeniowej do liczenia małych, szybko poruszających się obiektów, i związanego z tym szerokiego spektrum potencjalnych zastosowań przemysłowych.
W rozdziale 2 przedstawiona została literatura powiązana z tematem niniejszej pracy. Rozdział 3 poświęcony został szczegółowemu opisowi zaproponowanej metody zliczania obiektów wraz z wykorzystanym stanowiskiem testowym. Opis eksperymentów oraz otrzymane wyniki zamieszczone zostały w rozdziale 4. Natomiast rozdział ostatni 5 zawiera podsumowanie zrealizowanych prac wraz ze wskazaniem potencjalnych kierunków rozwoju projektu.
Problem zliczania obiektów z wykorzystaniem danych wizyjnych ze względu na swoje praktyczne zastosowanie był wielokrotnie analizowany w artykułach naukowych. W pierwszej części rozdziału omówiono prace związane ze zliczaniem obiektów różnych rodzajów przy pomocy klasycznych czujników wizyjnych. W drugiej części przedstawiono z kolei prace dotyczące podobnej tematyki wykorzystujące w tym celu czujniki zdarzeniowe.
W pracy [5] przedstawiono projekt inteligentnej kamery (ang. smart camera), której zadaniem było rozpoznawanie i zliczanie obiektów. Składała się ona z kamery przemysłowej Basler USB 3.0, platformy Nvidia Tegra TX1 zawierającej 256 rdzeni CUDA (ang. Compute Unified Device Architecture) i czterordzeniowego procesora ARM Cortex A57. Wykorzystano detektor punktów charakterystycznych SURF (ang. Speeded-Up Robust Features) do opisu wykrytych obiektów, którymi były logotypy dwóch marek samochodów. Poruszały się one po zamkniętych torach, które symulowały linie produkcyjne w fabryce. Wadą zaproponowanego rozwiązania była konieczność ograniczenia maksymalnej szybkości obiektów. Kolejnym ograniczeniem była mała szybkość obliczania detektora SURF. Dla obrazów o rozdzielczości 960 × 600 pikseli mógł on zostać obliczony tylko cztery razy na sekundę.
Autorzy artykułu [6] zaproponowali system do zliczania obiektów. Głównymi elementami tego rozwiązania było progowanie metodą Otsu i transformacja Hougha. Dla obrazu wejściowego wykonywana była konwersja z przestrzeni RGB do HSV. Dla składowej S wykonywano rozmycie Gaussowskie, a następnie progowanie metodą Otsu. Dla obrazu binarnego wyznaczane były krawędzie za pomocą filtrów Sobela. Obraz z wykrytymi krawędziami poddawany był dalej transformacie Hougha. Na podstawie wyniku transformaty wykonywano detekcję i zliczanie. Działało ono niezależnie od typu i koloru zliczanych elementów. W aplikacji wykorzystana została kamera typu global shutter o rozdzielczości 1280 × 720 pikseli @ 59 fps (ang. frames per second – klatki na sekundę). Powyższy algorytm był wykonywany tylko wtedy, kiedy zliczane obiekty znajdowały się w wyznaczonym miejscu. W pracy nie podano jednak czasu przetwarzania pojedynczej iteracji opisanego algorytmu oraz żadnych informacji na temat maksymalnej szybkości poruszania się obiektów.
Liczenie obiektów często jest wykorzystywane w kontekście monitorowania liczby osób lub pojazdów przemieszczających się w obserwowanym obszarze – przykładem takiej pracy jest [7]. Autorzy wykorzystali generację modelu tła metodą mieszanin rozkładów Gaussa. Następnie model tła był odejmowany od rejestrowanych obrazów, a wynik binaryzowany. W ten sposób wykrywane były obiekty pierwszoplanowe. Dalej wykorzystywany był algorytm przeszukiwania wszerz w celu zliczenia ruchomych obiektów pierwszoplanowych. Szybkość przetwarza-
80 Zliczanie szybkich obiektów z wykorzystaniem kamery zdarzeniowej POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
nia zaproponowanego algorytmu wynosiła 40 ramek na sekundę dla obrazów o rozdzielczości 320 × 240 pikseli, a dokładność zliczania przez zaproponowaną metodę 84,27 %.
Wśród prac traktujących o zliczaniu ludzi w określonych przestrzeniach można wymienić m.in. [8, 9]. Z kolei problem analizy ruchu drogowego został podjęty np. w pracy [10]. Wśród innych artykułów naukowych związanych z liczeniem obiektów można wymienić [11], opisujący potencjalne zastosowanie w przemyśle farmaceutycznym. Autorzy tej pracy także posłużyli się transformatą Hougha do liczenia obiektów, którymi były prostokątne pudełka na tabletki. Zaproponowane rozwiązanie umożliwiało działanie systemu wizyjnego w czasie rzeczywistym.
2.2. Kamera zdarzeniowa
Mimo dużej liczby publikowanych prac związanych z przetwarzaniem danych z czujników zdarzeniowych, których ogólny przegląd można znaleźć np. w [1], udało się znaleźć tylko jedną traktującą o problemie zliczania obiektów. W pracy [12] autorzy zaproponowali system do zliczania rowerzystów i pieszych z wykorzystaniem dwóch kamer zdarzeniowych. Na podstawie zarejestrowanych danych określane było położenie zdarzeń w przestrzeni trójwymiarowej (stereowizja). Następnie były one grupowane. Na podstawie wielkości grup i czasu ich obecności w polu widzenia kamery były one klasyfikowane jako pieszy lub rowerzysta. Skuteczność zaproponowanego systemu klasyfikacji wynosiła 92 %. Kamera zdarzeniowa skierowana była z góry na obiekty poruszające się na ścieżce. Zaproponowany system nie został przetestowany dla szybko poruszających się obiektów i przy dużym przepływie (powyżej 100 obiektów na minutę).
Algorytm do zliczania obiektów na podstawie zdarzeniowych danych wizyjnych został zaproponowany również przez firmę Prophesee. Przedstawiona metoda nie została jednak opisana w literaturze naukowej, więc informacje na jej temat są dostępne tylko w dokumentacji udostępnionej przez firmę. Obiekty są zliczane w poziomych liniach. Zakłada się, że poruszają się one z góry w dół. Konieczne jest dobranie odpowiednich parametrów algorytmu, by zliczanie było efektywne. Tymi parametrami są: odległość kamery od obiektów, ich średnia prędkość oraz minimalne wymiary, polaryzacja wykorzystanych zdarzeń oraz pozycje wspomnianych linii. Na początku strumień zdarzeń jest filtrowany zgodnie z zadanymi parametrami (filtr polaryzacji i aktywności). Sposób samego zliczania obiektów nie jest jednak opisany. Wiadomo, że każda linia działa jak niezależny licznik obiektów. Wynik jest maksymalną liczbą obiektów ze wszystkich linii.
Opracowany algorytm zliczania obiektów i sterowania silnikiem składał się z kilku elementów. W pierwszej kolejności stosowane były filtry, udostępnione przez producenta kamery Prophesee w oprogramowaniu Metavision, do redukcji liczby przetwarzanych na dalszych etapach zdarzeń. Drugą operacją było utworzenie ramki (obrazu) ze zdarzeń wykrytych w określonym przedziale czasowym. Do tego celu także użyto gotową funkcję oprogramowania Metavision, a czas akumulacji zdarzeń ustawiono na 2 ms, co odpowiadało generacji obrazów z częstotliwością 500 fps. Piksele na wygenerowanym w ten sposób obrazie otrzymały wartości 0 – gdy w danym miejscu nie było żadnego zdarzenia o dodatniej polaryzacji w czasie 2 ms, oraz 255 – gdy takie zdarzenie zostało w nim zarejestrowane.
Następnie stosowane były funkcje z biblioteki OpenCV –findContours oraz boundingRect do wyznaczenia obiektów oraz ich prostokątów otaczających (ang. bounding boxes). Kolejnym krokiem było porównanie wyznaczonych prostokątów otaczających na aktualnej oraz poprzedniej ramce, poprzez wyliczenie wartości parametru IoU (ang. Intersection over Union), znanego także jako indeks Jaccarda, zgodnie z wyrażeniem (1).
Stanowisko testowe do zliczania obiektów (rys. 1), przygotowane na potrzeby niniejszego projektu, składało się z podajnika wibracyjnego, kamery zdarzeniowej oraz komputera PC. Ziarna kukurydzy znajdowały się w podajniku z silnikiem wibracyjnym MT73. Silnik ten podłączony był do modułu ESP8266 z oprogramowaniem NodeMCU, programowalnego przy pomocy Arduino IDE (dla przejrzystości pominięto ten moduł na rysunku i w dalszej części artykułu nazywany jest w uproszczeniu Arduino), sterującego nim w trybie PWM (ang. Pulse-Width Modulation) z częstotliwością 1 Hz. Na drugim końcu podajnika znajdowała się niewielka szczelina, przez którą przemieszczały się ziarna, spadając do położonego niżej pudełka. Pomiędzy nimi zamontowana była kamera zdarzeniowa EVK1 firmy Prophesee o rozdzielczości HD (1280 × 720 pikseli), która służyła do rejestracji zmian jasności monitorowanego obszaru i w efekcie do detekcji oraz zliczenia spadających ziaren. Kamera podłączona była przez magistralę USB 3.0 do komputera stacjonarnego PC, dzięki czemu rezultaty działania systemu można było obserwować na podłączonym do niego monitorze.
() B A B A B A IoU ∪ ∩ = , (1)
gdzie: A, B to dwa zbiory, dla których liczona jest wartość IoU
Jeżeli otrzymana wartość była powyżej ustalonego progu (doświadczalnie wyznaczono go jako 0,1), to obiekt podlegał procesowi zliczania, a informacje o nim zapisywano w pomocniczej tablicy. Zastosowanie takiego podejścia pozwoliło na realizację uproszczonego śledzenia obiektów, dzięki czemu były one rozróżnialne od siebie (gdy spadało kilka ziaren jednocześnie), ale także miało na celu eliminację potencjalnego problemu liczenia wielokrotnie tych samych obiektów na kolejnych ramkach. Do samego procesu liczenia obiektów zastosowano trzy tzw. “linie zliczające”, czyli poziomie linie na obrazie. Dla obiektu dopasowanego między aktualną i poprzednią ramką wyznaczane były środki prostokątów otaczających (dokładnie współrzędne y). Z uwagi na kierunek ruchu ziaren kukurydzy (“w dół obrazu”), wykorzystano prostą zależność – na ramce poprzedniej środek obiektu powinien się znajdować nad określoną poziomą linią, a na następnej pod nią. Na podstawie przeprowadzonych
81
Rys. 1. Wykorzystane stanowisko testowe do zliczania obiektów Fig. 1. The used test stand for object counting
testów zdecydowano się na zastosowanie trzech takich linii, aby uniknąć sytuacji, w których obiekty nie zostały poprawnie zliczone. Ostatecznym wynikiem liczenia obiektów na danej ramce była wartość maksymalna z trzech linii zliczających. Na rysunku 2 przedstawiono zrzut ekranu działającego algorytmu. Widoczne są linie zliczające oraz prostokąty otaczające wokół spadających obiektów.
W celu ewaluacji działania zaprojektowanego systemu, wykonano szereg eksperymentów. Pierwszy rodzaj testów obejmował zatrzymanie systemu po zliczeniu określonej z góry liczby ziaren. Następnie rezultat działania porównywany był z wartością referencyjną – ziarnami policzonymi manualnie. Wyniki przeprowadzonych eksperymentów zamieszczono w tabeli 1. Na podstawie analizy wartości można stwierdzić, że system działał poprawnie, sporadycznie gubiąc ziarna podczas liczenia. Takie sytuacje najczęściej miały miejsce, gdy dwa ziarna spadały blisko siebie (np. jedno zasłaniało częściowo drugie), przez co algorytm wizyjny traktował je jako jeden obiekt.
Tabela 1. Wyniki testów, w których system zatrzymywany był po zliczeniu określonej liczby obiektów. Wartości określają liczbę wykrytych i zliczonych ziaren kukurydzy
Table 1. Results of tests in which the system was stopped after counting a certain number of objects. The values indicate the number of corn grains detected and counted
TestWartość ref.Wynik algorytmu Błąd [szt. (%)]
Rys. 2. Zrzut ekranu algorytmu zliczającego spadające obiekty Fig.
Opisany algorytm wizyjny stanowił część prostego systemu sterowania przepływem obiektów. Przed jego uruchomieniem, ustalany był oczekiwany przepływ, czyli liczba spadających ziaren w czasie jednej minuty. Silnik miał wprowadzać pojemnik z kukurydzą w takie wibracje, by liczba zliczonych ziaren w jednostce czasu odpowiadała wartości zadanej. Co 1 sekundę wyliczany był uchyb, rozumiany jako różnica między liczbą zliczonych obiektów a wartością spodziewaną w danym momencie, oraz sterowanie zgodnie ze wzorem dyskretnego regulatora PID (2).
() 1 1= + + = ∑ n n d n i i i n p n e e K e K e K u (2)
gdzie: u n – sterowanie w chwili n, K p, Ki, Kd – wzmocnienie części P, I, D regulatora, e n – uchyb w chwili n
Jego nastawy dobrane zostały doświadczalnie – K p = 2 na podstawie występowania oscylacji w układzie, Ki = 0,2 tak, by pozbyć się uchybu po kilkudziesięciu sekundach działania, a Kd otrzymało niewielką wartość 0,1, aby lepiej reagować na występowanie zatorów. Otrzymana wartość sterowania była następnie wysyłana przez port szeregowy do Arduino, który przesyłał silnikowi sygnały w trybie PWM, powodując jego ruch przez wyliczoną część sekundy. Dodatkowo dodane zostało zabezpieczenie, wyłączające urządzenie w przypadku wystąpienia zatoru lub opróżnienia górnego pojemnika z ziarnami.
Opisany algorytm zliczania obiektów napisany został w języku Python i uruchomiony na komputerze PC wyposażonym w procesor Intel Core i7-7700K. Z uwagi na zastosowane filtracje zdarzeń i tym samym istotne ograniczenie ich liczby, algorytm przetwarzał dane wizyjne w rozdzielczości HD w czasie rzeczywistym. Należy zauważyć, że w ogólnym przypadku czas ten jest w dużej mierze uzależniony od liczby zdarzeń (także poziomu szumu) oraz wykrytych obiektów.
Drugi rodzaj eksperymentów polegał na zliczeniu ziaren, które spadły w ciągu 5 minut działania systemu przy różnych wartościach zadanego przepływu. Dane z tych testów zebrane zostały w tabeli 2. Ponownie wystąpiły pewne rozbieżności między wynikami algorytmu wizyjnego a wartościami oczekiwanymi na wyjściu systemu automatycznej regulacji, jednakże były one nieznaczne.
Tabela 2. Wyniki eksperymentów, w których system regulacji automatycznej działał przez 5 minut dla różnych wartości zadanego przepływu (liczby ziaren na minutę). Wartości określają liczbę ziaren kukurydzy
Table 2. Results of experiments in which the automatic control system operated for 5 minutes for different values of the set flow rate (expressed in number of grains per minute). The values specify the number of corn grains
Test Zadany przepływ Wartość spodziewana Wynik algorytmu Błąd [szt. (%)]
2.150250243–7 (2,8)
2.220010001002+2 (0,2)
2.330015001499–1 (0,1)
Celem trzeciego rodzaju testów było porównanie działania zaprojektowanego algorytmu wizyjnego z przykładowymi aplikacjami do liczenia obiektów od firmy Prophesee. Przeprowadzono kilka eksperymentów, w których podawano stały sygnał sterujący (o różnym wypełnieniu w poszczególnych testach), nagrywając sekwencje zdarzeń trwające 1 minutę. Zostały one następnie podane na wejście algorytmu zaproponowanego w tej pracy oraz aplikacji od Prophesee. Rezultaty wykonanych testów umieszczone zostały w tabeli 3.
1.125250 (0) 1.26059–1 (1,7) 1.3109107–2 (1,8) 1.4199197–2 (1,0)
2. Screenshot of the falling objects counting algorithm
82
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Zliczanie szybkich obiektów z wykorzystaniem kamery zdarzeniowej
Tabela 3. Porównanie wyników zaproponowanego algorytmu do zliczania obiektów z aplikacją firmy Prophesee. Wartości określają liczbę wykrytych i zliczonych ziaren kukurydzy
Table 3. Comparison of the results of the proposed algorithm for object counting with Prophesee’s application. Values indicate the number of corn grains detected and counted
Prophesee /Błąd [szt. (%)] 3.19797/0 (0)97/0 (0)
może być zastosowanie kilku luster, których rola byłaby podobna co dodatkowych kamer – umożliwić analizę przestrzeni z wielu widoków, nie generując przy tym tak wysokich kosztów, jak w przypadku systemu wielokamerowego. Jeszcze innym pomysłem na dalszy rozwój projektu może być liczenie i rozpoznawanie różnych typów obiektów, spadających ze zsypu.
Zastosowanie kamery zdarzeniowej umożliwia wykrywanie i zliczanie małych, szybko poruszających się obiektów, dzięki czemu zaproponowane podejście jest bardziej uniwersalne i w wielu aspektach lepsze od rozwiązań z tradycyjnymi kamerami wizyjnymi. Przedstawiona metoda może stanowić podwalinę pod projektowanie potencjalnych aplikacji przemysłowych, m.in. do liczenia elementów na liniach produkcyjnych czy pakowanych do pudełek.
Praca przedstawiona w niniejszym artykule została wsparta programem “Inicjatywa doskonałości – uczelnia badawcza” dla Akademii Górniczo-Hutniczej oraz częściowo wsparta projektem Narodowego Centrum Nauki nr 2021/41/N/ST6/03915 zatytułowanym “Akceleracja przetwarzania zdarzeniowych danych wizyjnych z wykorzystaniem heterogenicznych, reprogramowalnych układów obliczeniowych”.
Na podstawie przeprowadzonych testów można wysnuć kilka wniosków. Zaproponowany system wizyjny działa poprawnie, umożliwiając zliczanie spadających małych obiektów w czasie rzeczywistym. System regulacji automatycznej także działa prawidłowo, pozwalając na sterowanie silnikiem w taki sposób, aby uzyskać oczekiwany przepływ (zadaną liczbę ziaren w jednostce czasu). W niektórych eksperymentach występują drobne rozbieżności między wynikami a wartościami referencyjnymi, jednak jak zostało to wspomniane wcześniej, głównym tego powodem jest nakładanie się obiektów na obrazie utworzonym ze zdarzeń. Z kolei źródłem “nadmiarowych zliczeń” są pojedyncze sytuacje, w których dany obiekt jest liczony dwukrotnie, np. gdy zostanie utracony w procesie śledzenia na kilku kolejnych ramkach. Wymienione problemy występują jednak sporadycznie i rzadziej niż w przypadku aplikacji od Prophesee.
5. Podsumowanie
W ramach omawianej pracy zrealizowany został system wizyjny wyposażony w kamerę zdarzeniową, przeznaczony do zliczania szybko poruszających się obiektów. Zaimplementowany algorytm umożliwiał analizę rejestrowanych przez kamerę zdarzeń w czasie rzeczywistym, a w konsekwencji wykrywanie i liczenie obiektów. Przygotowane stanowisko testowe składało się także ze zsypu wyposażonego w podajnik wibracyjny obiektów (ziaren kukurydzy).
Przeprowadzone eksperymenty potwierdziły słuszność zaproponowanego podejścia – otrzymywane wyniki były bardzo zbliżone do wartości referencyjnych. Jedynie w pewnych specyficznych sytuacjach system nie liczył prawidłowo wszystkich ziaren, np. gdy jedno z nich było częściowo przysłonięte przez inne. Z kolei zastosowanie trzech linii zliczających pozwoliło znacznie zminimalizować liczbę przypadków, w których pojedyncze ziarna były “gubione” między kolejnymi ramkami.
Dalsze prace nad projektem mogą obejmować kilka potencjalnych zagadnień. Jednym z nich jest zastosowanie zestawu kilku kamer zdarzeniowych, monitorujących analizowaną przestrzeń z różnych miejsc. Dzięki temu powinna być możliwa eliminacja wspomnianych sytuacji, w których obiekty są przesłonięte lub połączone, i trudno je poprawnie policzyć. Innym zagadnieniem
1. Gallego G., Delbrück T., Orchard G., Bartolozzi C., Taba B., Censi A., Leutenegger S., Davison A., Conradt J., Daniilidis K., Scaramuzza D., Event-Based Vision: A Survey. „IEEE Transactions on Pattern Analysis and Machine Intelligence”, Vol. 44, No. 1, 2022, 154–180, DOI: 10.1109/TPAMI.2020.3008413.
2. Lichtsteiner P., Posch C., Delbruck T., A 128 × 128 120 dB 15 μs Latency Asynchronous Temporal Contrast Vision Sensor, „IEEE Journal of Solid-State Circuits”, Vol. 43, No. 2, 2008, 566–576, DOI: 10.1109/JSSC.2007.914337.
3. Kim H., Leutenegger S., Davison A., RealTime 3D Reconstruction and 6-DoF Tracking with an Event Camera. „Computer Vision – ECCV”, 2016, 349–364.
4. Padala V., Basu A., Orchard G., A Noise Filtering Algorithm for Event-Based Asynchronous Change Detection Image Sensors on TrueNorth and Its Implementation on TrueNorth. „Frontiers in Neuroscience”. No. 12, 2018, DOI: 10.3389/fnins.2018.00118.
5. Lee S., Yang C., A real time object recognition and counting system for smart industrial camera sensor. „IEEE Sensors Journal”, Vol. 17, No. 8, 2017, 2516–2523, DOI: 10.1109/JSEN.2017.2671457.
6. Baygin M., Karakose M., Sarimaden A., Akin E., An image processing based object counting approach for machine vision application. „ArXiv Preprint„ ArXiv:1802.05911, 2018, DOI: 10.48550/arXiv.1802.05911.
7. Liu J., Na W., Fast moving object counting from video. 2017 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), 2017, 337–340, DOI: 10.1109/ISPACS.2017.8266499.
8. Lee K., Tsai L., Hung P., Fast People Counting Using Sampled Motion Statistics. 2012 Eighth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, 2012, 162–165, DOI: 10.1109/IIH-MSP.2012.45.
9. Saidon M., Mustafa W., Rajasalavam V., Khairunizam W., Automatic People Counting System Using Aerial Image Captured by Drone for Event Management. [In:] Intelligent Manufacturing and Mechatronics, 2021, 51–65, DOI: 10.1007/978-981-16-0866-7_4.
83
TestWartość ref. Zaproponowany algorytm/Błąd [szt. (%)] 3.2115115/0 (0)116/+1 (0,9) 3.3191190/–1 (0,5)194/+4 (2,1) 3.4129130/+1 (0,8)131/+2 (1,6) 3.5199199/0 (0)201/+2 (1,0) 3.6173173/0 (0)175/+2 (1,2)
10. Liu C., Huynh D., Sun Y., Reynolds M., Atkinson S., A Vision-Based Pipeline for Vehicle Counting, Speed Estimation, and Classification. „IEEE Transactions on Intelligent
Transportation Systems”, Vol. 22, No. 12, 2021, 7547–7560, DOI: 10.1109/TITS.2020.3004066.

11. Wu H., Wang Y., Ma H., Li B., Jin Y., Vision Based Realtime High-accuracy Automatic Counting with Applications for Smart Pharmacy. 40th Chinese Control Conference (CCC), 2021, 6429–6435, DOI: 10.23919/CCC52363.2021.9549691.
12. Belbachir A., Schraml S., Brändle N., Real-time classification of pedestrians and cyclists for intelligent counting of non-motorized traffic c . IEEE Computer Society Conference on Computer Vision and Pattern Recognition-Workshops, 2010, 45–50, DOI: 10.1109/CVPRW.2010.5543170.
Abstract: This paper proposes the use of an event camera as a component of a vision system that enables counting of fast-moving objects – in this case, falling corn grains. These cameras transmit, in an asynchronous manner, information about the change in brightness of individual pixels and are characterised by low latency, no motion blur, and correct operation in different lighting conditions, as well as very low power consumption. The proposed counting algorithm processes events in real time. The operation of the solution was demonstrated on a stand consisting of a chute with a vibrating feeder, which allowed the number of falling grains to be adjusted. The objective of the control system with a PID controller was to maintain a constant average number of falling objects. The proposed solution was subjected to a series of tests to determine the correctness of the developed method operation. On their basis, the validity of using an event camera to count small, fast-moving objects and the associated wide range of potential industrial applications can be confirmed.
Keywords
Kamil Bialik



ORCID: 0000-0001-9524-3395
ORCID: 0000-0002-4257-8877
ORCID: 0000-0002-1071-335X
ORCID: 0000-0001-6798-4444
84 Zliczanie szybkich
z
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
obiektów
wykorzystaniem kamery zdarzeniowej
The demand for electric vehicles is high due to the fact of their low travel costs. Meanwhile, an increase in the car driving range is expected. Hence, this paper examines different concepts related to driving a battery electric vehicle. The driving scenarios were divided into two parts. The first part consisted of four stages: driving in a mixed cycle, charging the battery, driving a very short distance, and driving distances that were within the maximum theoretical range of the batteries. The second par t involved driving a distance until the range extender system was activated. The outcomes of these experimental investigations are described and the key findings are presented in the discussion.
1. Introduction
The operating principle of a battery electric vehicle (BEV) may differ from those of an internal combustion engine (ICE). A driver who uses an ICE is not necessarily involved in an economic drive for a variety of reasons [1, 2]. One of the reasons is the difference between BEVs and ICEs in the consumption of fuel. An aggressive driving style has an impact on the operating costs of a vehicle and the emission of environmental air pollutants [3]. The results of a study [4] demonstrated that the average fuel consumption under an aggressive style of driving in an urban area was up to 30 % higher than that during a calm style of driving. In motorway tests, the average fuel consumption increased by 4 %. This is different for BEVs, where unskilled driving significantly increases the energy requirement [5]. Therefore, many studies have been conducted on energy requirements, determining that the driving style is crucial [6–8]. In Poland, the topic of BEV is up to date. Poland is a leading manufacturer of batteries for BEV, and the production of Izera BEV was scheduled for two years. Scientists from i.a. Kielce, Warszawa, and Lublin are conducting research on electric cars. Scientists at the Warsaw University of Technology are conducting research on a new generation of batteries without substances such as fluoride, nickel, and cobalt [9, 10]. The specified chemical composition allowed for an increase in battery life. In turn, resear-
chers from the Kielce University of Technology are focusing on the issue of introducing BEVs as an alternative to ICEs [11–13]. Such actions are very important due to reducing environmental pollution and improving air quality. These requirements relate to zero-emissions standards. The feeling of range connected with access to suitable EV charging outlets is very important [14]. Therefore, a minimum number of electric vehicle charging outlets has been determined [12], and even innovative charging stations were developed by scientists from Lublin, who are working on improving the methods of charging BEVs [15, 16].
Abbreviations used in article NomenclatureDescription
BEVbattery electric vehicle
DtEdistance to empty
ECenergy consumption
ICEinternal combustion engine
SoCstate of charge
BRbattery’s range
BRinit initial battery range
Energy consumption (EC) in BEVs should be considered in terms of the manner of EC in these vehicles and the type of driving range estimation algorithm. One of the research companies is the BMW brand, which has attempted to improve its I3 model. Studies focused on improving an electric vehicle’s distance to empty (DtE) estimation. Studies [17–19] confirm
Eenergy Ooverestimation Sdistance Vvelocity
85 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 85–92, DOI: 10.14313/PAR_247/85
that estimating the theoretical range of electric vehicles is inaccurate. Factors, such as driving style or heat pump operation in the heating mode, are not included in the estimation algorithm. Conventional DtE algorithms estimate the vehicle’s future EC and the estimation results are displayed on the vehicle’s dashboard as a theoretical range. Firstly, as long as the estimated error rate of the DtE is greater, there will be more changes from its past use to its future use, i.e., the more EC factors that occur (heating, defrosting, etc.), the more difficult it is to predict future EC. Accurate results will be displayed when the future use is similar to its past use or applicable information about its future use is known beforehand [19]. Secondly, energy measurements can be made in strictly defined locations. One may experience some problems while measuring energy as when energy is measured at the input of the motor, the motor controller and battery losses are not included [18].
Energy consumption models can be also found in the literature [20, 21]. However, these models do not include driving style parameters. In [20], a comprehensive model to measure an electric vehicle’s EC and carbon emissions was developed. This model consisted of velocity, load, and distance parameters. In another work [21], vehicle mass, velocity, and gradient of the terrain were included. There were also models that assumed a linear dependence of the EC on the traveled distance [22, 23]. Real-life EC is not a linear function of traveled distance [21] as assumed in [22, 23]. Even more realistic models do not take into account driving styles. Although the above-mentioned papers analyzed the EC problem, they did not consider the case of driving styles. This is why the impact of driving style on the EC in BEVs is of great importance, as demonstrated in the conducted research. Therefore, the extendibility of the theoretical driving range considered in the driving style problem may be another promising research direction.
Due to the inaccuracies of the range estimation algorithm [17–19] and simulation models [20 –23], an upgrade of the driving technique and DtE experiments should be considered. Moreover, the results of DtE experiments are not presented in the literature [24–29].
The following results relate to the selected concepts of electric vehicle driving, which were different compared to the cataloged data considered in [45]. The presented results came from different stages of the research and were divided into two modules, which are described in Sections 3.1 and 3.2. For both modules, test drives of an electric vehicle powered by a battery were performed.
3.1. First test
The first stage of the test was a test drive in a mixed cycle. The obtained results are shown in Figure. 1, where the data were available in Polish. Subsequently, the English language equivalents are provided in Figure. 1. The first stage of the driving test was conducted for the distance (S) = 117 km, and the travel time was 176 min. The average EC for the S = 100 km was 11.2 kWh, and the average velocity (V) was 11.3 m/s.

During the second stage of the test, the battery was charged with an external charger powered by a 400 V network. We used the EC meter, LE-03MW [46], as it complies with the standard EN50470-1/3. After charging the battery, the theoretical driving range for the battery was 161 km, and the theoretical driving range for the REx System was 122 km (Fig. 2).
The aim of the third stage of the test was to verify the information shown on the on-board computer. The third stage consisted of driving of S = 100 m with a constant V equal to 0.67 m/s. When finished driving, the theoretical driving range for the battery was 140 km and the theoretical driving range for the REx System was 106 km (Fig. 3).

The fourth stage of the test related to a test distance that was within the maximum theoretical range of the battery. The fourth scenario was to drive distances of different lengths and consumptions of a part of the battery’s energy (Table 1). One of the cases was performed for the S = 115 km, with the initial range of the battery being 161 km and the initial range for the fuel being 122 km. Having completed the distance S = 115.2 km,
The main goal of the manuscript was to conduct the DtE tests and to show the impact of driving style on the range of BEVs. The tests were performed on a BEV with a REx System (i.e., BMW I3 REx from 2017). The tested car had the 0.65 dm3 in-line two-cylinder engine with a 21.6 kW generator, a 125·kW permanent magnet synchronous AC motor, and an 18.8 kWh lithium-ion battery (60 Ah BMW i3 REx). The REx System automatically recharges the battery using a combustion engine when its level is low [30]. The REx System’s activation is loud, making it uncomfortable for everyday usage or onward travel [31]. The obtained data were read from the hidden service menu to avoid energy measurement problems described in [18]. In this case, each test was repeated at a full state of charge (SoC). To ensure accuracy, all used batteries were in warranty and free of any mechanical damage. The tests simulated driving on a daily basis. During the trials we assumed the following:
−The season was common to all tests;
−The air cooling was always turned off [17–19];
−The vehicle followed traffic regulations;
−The vehicle accelerated adequately according to the traffic conditions and driving style of the other drivers;
−The vehicle did not move while idling.
Fig. 1. Data from the on-board computer from the first stage of the first test Rys. 1. Dane z komputera pokładowego; pierwszy etap pierwszego testu
86 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Fig. 2. The theoretical ranges calculated by the on-board computer from the second stage of the first test Rys. 2. Wskazanie zasięgu teoretycznego obliczone przez komputer pokładowy; drugi etap pierwszego testu
the battery’s remaining range was 8 km, and the REx’s range was 106 km. This leads to the conclusion that the discrepancies between the battery’s range and the REx’s range between the initial and final values were 37.8 km and 16 km, respectively. One can determine that the battery’s range was overestimated by 37.8 km, which is inadequate according to the initial information. Another overestimation of the battery’s range (Table 2) for other lengths of the test distances can be also calculated (1) in a similar manner. For example, at a distance of 100.3 km, the overestimation was 39.7 km, while at a distance of 200 m, the overestimation was 24.8 km. The overestimation was calculated as the difference between the initial range of the battery (161 km), the battery’s range, and the distance of a given length. A detailed analysis of the results is described in Section 4.
Here:
O = BRinit – BR – S (1)
−O stands for overestimation of the range;
−BRinit is the initial battery range, a constant = 161 km;
−BR is the battery’s range;
−S represents distance.
For the displayed battery range, statistical parameters such as mean BR, median Me, quartiles Q1, Q2, Q3 and standard deviation were calculated. BR value was 72, Me value was 63, Q1 was 20, Q2 was 63, Q3 was 136, and value was 61. If the two longest distances i.e. 111.4 km and 115.2 km were not taken into account, the BR value would be 89, and value would be 58. This proves that the battery range value was
incorrectly estimated by the on-board computer even after driving more than 100 km where the theoretical range should be predicted with high precision after recognizing factors such as ambient temperature or traffic conditions. Even dividing data using quartiles Q1, Q2, and Q3, the distances do not match the on-board computer estimation.

The obtained results were also presented in Fig. 4. Figure. 4 shows the dependence of the distance in the function of the
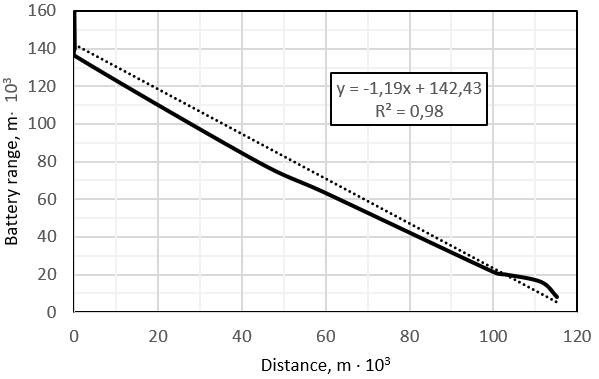
Energy source Total Theoretical Range, km Displayed Fuel Range, km Displayed Battery Range, km SoC, % Ambient Temperature, K Distance, km Battery 283122161100299.650 246106140 – 299.650.1 240104136 – 299.650.2 1779780 – 299.6543.6 161986352.5300.1560.2 1209921 – 300.15100.3 1211012016.0300.15102.8 1221061611.0300.15111.4 Range Extender System11410686.5300.15115.2
Tab. 1. Energy (E) for a charging battery (E = 18.75 kWh) – cumulative data from the first test Tab. 1. Zużycie energii do naładowania pakietu bateryjnego (E = 18,75 kWh) – zbiorcza tabela danych dla pierwszego testu
Fig. 3. The theoretical ranges after driving the test distance S = 100 m from the third stage of the first test Rys. 3. Wskazanie zasięgu teoretycznego obliczone przez komputer pokładowy po przejechaniu odcinka S = 100 m; trzeci etap pierwszego testu
Energy source Battery Range, km Distance, km Overestimation, km Battery 1610 –1400.120.9 1360.224.8 8043.637.4 6360.237.8 21100.339.7 20102.838.2 16111.433.6 Range Extender System 8115.237.8
Tab. 2. Overestimations of the range Tab. 2. Wartości przeszacowań zasięgu
87
Fig. 4 Distance graph in the function of the battery range Rys. 4. Wykres przejechanego dystansu w funkcji wyświetlanego zasięgu na pakiecie bateryjnym
displayed battery range. It should be noted that the displayed battery range decreased linearly with the distance. Linear regression was obtained with a high correlation coefficient of 0.98. The results differ from linear dependence referring to the moment after starting and before REx System activation.
3.2. Second test
The second test started with charging the battery. The theoretical range for the battery was 135 km and the theoretical range for REx System was 151 km (Fig. 5). In this scenario, the considered distance was 96.9 km. The distance was understood as driving until the REx System was activated. The example results are as follows: the displayed battery range changed from 152 km to 8 km (Table 3); thus, it decreased by 144 km. By contrast, the reverse was true for the displayed fuel range, where the theoretical distance increased by 33 km, from 106 km to 139 km. The information displayed on the monitor was optimistic, though imprecise. For the battery, the effective range was 33 % less than the theoretical range. The difference may be explained by the analysis of the power management solutions. One can easily observe that the report from the on-board computer confirms that the accumulated energy for a full SoC was 17.7 kWh (Fig. 6); however, all of the accumulated energy in the battery cannot be used. At an 8 % battery SoC, the REx System was automatically activated [47].


This solution is imposed by BMW, and it is not possible to interfere with the REx System’s activation. By comparison, in [32], a 6 % battery SoC for the REx System was modeled for the 2014 BMW i3. The 8 % level corresponded to 1.42 kWh of remaining energy; hence, the usable energy was 16.28 kWh.
One of the declared parameters (Table 4) was the theoretical range that equaled 120 km with a 14.75 kWh/100 km EC. The declared parameters are impossible to reach for a 17.7 kWh battery capacity. The performed research confirmed that a 15 kWh/100 km EC is necessary to achieve 118 km of the theoretical range (Table 4). Based on the results of the investigations, it was proven that the catalog data strongly depended on the efficiency of the battery, which changed over time. If the efficiency of the battery changes, the catalog data should also change. After charging a battery several times, the efficiency decreased by 5.8 % in our studies. It is worth mentioning that the efficiency of the battery is due to the method of charging the battery [33, 34]. Decreasing the battery efficiency mainly affects the car’s performance, and the catalog data cannot be achieved. Therefore, decreasing the battery capacity will discredit the achievement of the catalog data.
The battery efficiency was estimated at 94.2 %. This implies that its efficiency decreased by 5.8 % relative to the nominal rate. In addition, there was no problem with the power or its transfer to the traction system during the charging and discharging processes. Thus, it can be concluded that the battery was not worn out (which was confirmed by the battery
Fig. 5. The theoretical ranges calculated by the on-board computer from the first stage of the second test Rys. 5. Wskazanie zasięgu teoretycznego obliczone przez komputer pokładowy; pierwszy etap drugiego testu
Fig. 6. Information regarding the full SoC Rys. 6. Wskazanie na wyświetlaczu po naładowaniu pakietu bateryjnego
Energy source Total Theoretical Range, km Displayed Fuel Range, km Displayed Battery Range, km SoC, % Ambient Temperature, K Distance, km Battery 258106152100293.150 23297135 – 293.156.6 271147124 – 293.156.8 265145120 – 292.158.6 259143116 – 290.158.9 24313510886.0290.1513.7 1671254239.0288.1552.2 1501232726.0288.1572.7 1461291716.5289.6584.9 Range Extender System 14613987.5290.1596.9 15514698.0291.65104.9 15314696.0291.15113.1 88 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Tab. 3. Energy (E) for a charging battery (E = 18.94 kWh) cumulative data from the second test Tab. 3. Zużycie energii do naładowania pakietu bateryjnego (E = 18,94 kWh) – zbiorcza tabela danych dla drugiego testu
management system (BMS) and the charger analysis system); thus, the energy was distributed evenly among the battery cells [35].
4. Discussion
Taking into account the main objectives of this paper, as formulated in the last paragraph of Section 1, one should address the given test suites as correct. However, there was a discrepancy between the obtained results and the catalog data. Therefore, it was essential to verify the information regarding the tested electric car. The main problem arises from the small transfer of experience from the use of an ICE to the use of a BEV [17, 36]. An inexperienced driver will have concerns about limited range in the middle of the trip [37]. This anxiety is reduced with experience, as the driver learns about his car during the trip [38]. However, the most experienced the car’s capabilities, the greater concerns about the displayed range [38]. Range information changes because of factors not known or understood by drivers (silence while driving) [36], and the information is therefore deemed unreliable. The authors of [39] rightly concluded that “the most perfect device, in the hands of a person unprepared to handle it, becomes a useless device”. This follows from the fact the use of a BEV is more difficult than the use of an engine vehicle or electric traction vehicle, resulting in energy efficiency. BEVs do not move along strictly defined routes and do not have scheduled places to stop in comparison to electric traction vehicles, where the traffic is planned ahead [40, 41]. The experience with the use of electric vehicles and implementation of the selected driving techniques allow for high energy efficiency. For clarity, the discussion was also divided into two parts. The first part describes the first test, and the second part describes the second test.
Testing began with a test drive and charging a battery (first and second stage of the first test). Based on the performed research, it was shown that the on-board computer calcula-
ted an instantaneous range [42]; thus, the theoretical range after charging (161 km) was higher than the traveled distance (117 km). An analysis of the theoretical ranges confirmed the thesis regarding the strong impact of the average EC. The theoretical distance changed when the motor started. Itself, the driver model in the used electric car is a moot point and can shorten the theoretical range. This problem is related to the small capacity of the battery; therefore, the range changes very dynamically depending mainly on the driving style. One solution to this problem could be limiting the vehicle’s power, which reduces the EC. The reduction in EC could cause better management of the energy and, above all, a more realistic calculation of the range. A short S = 100 m with a constant V was also performed in the third stage of the first test. One may wonder why the overestimations of the theoretical ranges were so large, even for short distances (Table 2). Short distances shall be understood as 100 m and 200 m. For longer distances, one could assume that the causes of the overestimations were uphill driving and a strong wind blowing in the opposite direction of the travel [43]. However, in such cases, the overestimations for short distances should not be so drastic (up to 24.8 km). This confirms the analysis was intended to prove the calculation of the averaged EC with respect to the last drive. In the second test, the first attempt at driving was made until the REx System was activated. The first attempt was performed for the S = 96.9 km, where the change in the displayed battery range decreased by 144 km, and for the displayed fuel range it increased by 33 km (Table 3). The changes in the displayed ranges concern the effective range. Longer distances (after REx activation), (i.e., 104.90 km and 113.10 km) were also characterized by a similar relationship. In addition, the fuel range did not change for longer distances, as it had a constant value of 146 km. The REx System generated power for the battery from the ICE; thus, the fuel range value should decrease. This is what should be considered a wrong algorithm. In the catalog data [34], one can find notice of the REx System’s activation. The system is activated when the battery
1NEDC – New European Driving Cycle
Tab. 4. Comparison of the tests and catalog data
Parameter Battery Capacity, kWh Power taken from the Grid, km Distance, km Energy Consumption kWh/100 km Energy Consumption by the I3REx, kWh/100 km Theoretical Range of the I3REx, km Distance Discrepancy, % Energy Consumption Discrepancy, % First test16.5518.75115.214.3614.00116.313 Second test16.3718.9996.916.8915.10107.81112 Catalog data (averaged minimum energy consumption) 17.7Catalog data15118 Catalog data (averaged maximum energy consumption) 17.7Catalog data1898 Catalog data (minimum battery range) 17.7Catalog data14.75120 Catalog data (maximum battery range) 17.7Catalog data11.80150 Catalog data (NEDC1) 17.7Catalog data13.50131
Tab. 4. Zestawienie uzyskanych wyników i danych katalogowych
89
level is below 8 %. This internal control system is not generally available, and it is not possible to interfere with it. Only the on-board computer determines the REx System’s activation. However, despite this, the 8 % level is a debatable value. The precise determinations of the SoC at the time of the REx System’s activation were from 6.5 % to 7.5 %, which corresponded to 1.15 kWh and 1.33 kWh.
The battery’s efficiency as well as the influence of different factors on its efficiency are also subjects worth discussing. The reliability of batteries requires an efficient battery management system. Charging/discharging rates and temperature affect the battery’s efficiency. In [44], two main factors were taken into account: charging/discharging rates and temperature. The main factors that affected the battery’s efficiency were technological and consumable. The technological factor depended on the final quality of the battery cells, the choice of voltage correctness in every cell, and the technological quality of battery balancing for the charging and discharging processes. Firstly, the energy is stored in the battery, and then there is the balancing process. The balancing process begins when the energy in the battery is at an 80 % level, and it is necessary to stabilize the voltage in each cell. It is important not to disconnect a charger and perform the balancing process. The consumable factor depended on the driver’s experience and the way that the battery was used.
A discussion regarding the discrepancy between the obtained results of the test drives was also established. Let’s compare the fourth stage of the first test (S = 115.2 km) and the second test (S = 96.9 km). One should notice that the test drives were made for different pre-programmed modes. The following two pre-programmed modes were considered: eco and comfort. The arrangement of these driving modes characterizes different driving strategies. The eco mode is designed for maximum ranges where driving comfort is not important, for example, the air conditioning is turned off. The comfort mode, by contrast, is designed for maximum driving comfort where ranges are not so important. When the comfort mode is selected, the driver expects better conditions inside the cabin and is able to increase travel costs by increasing comfort. Here, the energy is used up on electrical devices. The obtained results are incompatible with the idea of the manufacturer. The distance in the comfort mode should be shorter than in the eco mode and reach 115.2 km for comfort mode and 96.9 km for eco mode. These results do not deny the manufacturer’s technology; it only shows how important is the driver’s role in the electric car. An experienced driver with technical knowledge regarding an electric car can achieve a better result in the comfort mode with a proper driving style. An inexperienced driver will obtain a shorter distance, even in the eco mode.
Experimental observations of BEVs are important and help to understand their EC characteristics. This article can be considered as a source of data for the development of a new EC model taking into account driving styles. The results of the research presented in this paper are encouraging, especially on urban routes where traffic conditions change rapidly and are unstable (i.e., stop-and-go). Urban routes are understood as the flow of traffic with a large number of crossroads, devices that break off traffic, and the presence of pedestrians and cyclists. Driving on extra-urban routes is more stable (i.e., a constant V). The scenarios adopted in the research process can be useful for battery electric producers or consumers. If the manufacturers provide cars for testing before buying and keep statistics, then it will be possible to choose the appropriate drive train. The drive train would be personalized to the individual person, which would decrease operational costs by reducing the battery capacity and its weight. All of this results in energy savings.
In conclusion, the conducted research showed the importance of driving styles. Even when driving according to the regulations, one may observe an increase in EC. As a result, the theoretical range was significantly lower than the vehicle’s specifications or those displayed on the on-board monitor. This exposes drivers to low psychological comfort and more frequent charging. The measurements show that the driving style reduced the theoretical range of BEVs. In particular:
−The DtE value was different from the prediction of the on-board computer. The on-board computer calculated an instantaneous range;
The battery range was lowered by 21 km after only 100 meters of driving. The reason is averaging EC with respect to the last drive;
−The precisely determined SoCs were from 6.5 % to 7.5 % at the time of the REx System’s activation;
−An experienced driver with technical knowledge regarding an electric car can achieve a better result in the comfort mode with a proper driving style;
The used battery efficiency was estimated at 94.8 % and therefore the catalog data cannot be achieved (Table 4);
The presented results concern the BMW I3 REx from 2017, but it should be noted that the manufacturer introduced significant changes to the next model in 2018. The changes relate to the battery’s energy management system, and this was because of the environmental requirements and the assumption that a BEV should have zero emissivity. Thus, eco-friendly vehicles cannot be supported by an ICE, as a BMW with a REx system.
References
1. Sehil K., Alamri B., Alqarni M., Sallama A., Darwish M., Empirical Analysis of High Voltage Battery Pack Cells for Electric Racing Vehicles. “Energies”, Vol. 14, No. 6, 2021, DOI: 10.3390/en14061556.
2. Ehsani M., Gao Y., Gay S.E., Emadi A., Modern Electric Hybrid Electric and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2005.
3. Türler D., Hopkins D., Goudey H., Reducing Vehicle Auxiliary Loads Using Advanced Thermal Insulation and Window Technologies. SAE International, 2003.
4. Helmers E., Dietz J., Weiss M., Sensitivity Analysis in the Life-Cycle Assessment of Electric vs. Combustion Engine Cars under Approximate Real-World Conditions. “Sustainability”, Vol. 12, No. 3, 2020, DOI: 10.3390/su12031241.
5. Szumska E., Jurecki R., The Effect of Aggressive Driving on Vehicle Parameters. “Energies”, Vol. 13, No. 24, 2020, DOI: 10.3390/en13246675.
6. Xian T.F., Soon C.M., Rajoo S., Romagnoli A., A Parametric Study: The impact of Components Sizing on Range Extended Electric Vehicle’s Driving Range. Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 25-27 October 2016, DOI: 10.1109/ACEPT.2016.7811511.
7. Jurecki R.S., Stańczyk T.L., A Methodology for Evaluating Driving Styles in Various Road Conditions. “Energies”, Vol. 14, No. No. 12, 2021, DOI: 10.3390/en14123570.
8. Benderius O., Markkula G., Wolff K., Wahde M., Driver behaviour in unexpected critical events and in repeated exposures – a comparison. “European Transport Research Review”, Vol. 6, 2014, 51–60, DOI: 10.1007/s12544-013-0108-y.
9. Bitner-Michalska A., Nolis G.N., Żukowska G., Zalewska A., Poterała M., Trzeciak T., Dranka M., Kalita M., Jankowski P., Niedziecki L., Zachara J., Marcinek M., Wieczo-
90 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
rek W., Fluorine-free electrolytes for all-solid sodium-ion batteries based on percyano-substituted organic salts “Scientific Reports, Vol. 7, 2017, DOI: 10.1038/srep40036.
10. Marcinek M., Syzdek J., Marczewski M., Piszcz M., Niedziecki L., Kalita M., Plewa-Marczewska A., Bitner A., Wieczorek P., Trzeciak T., Kasprzyk M., Łężak P., Żukowska Z., Zalewska A., Wieczorek W., Electrolytes for Li-ion transport – Review. „Solid State Ionics”, Vol. 276, 2015, 107–126, DOI: 10.1016/j.ssi.2015.02.006.
11. Sendek-Matysiak E., Grysa K., Assessment of the Total Cost of Ownership of Electric Vehicles in Poland. “Energies”, Vol. 14, No. 16, 2021, DOI: 10.3390/en14164806.
12. Sendek-Matysiak E., Pyza D., Prospects for the development of electric vehicle charging infrastructure in Poland in the light of the regulations in force. “Archives of Transport”, Vol. 57, No. 1, 2021, 43–58.
13. Sendek-Matysiak E., Multi-criteria analysis and expert assessment of vehicles with different drive types regarding their functionality and environmental. “Scientific Journal of Silesian University of Technology”, Vol. 102, 2019, 185–195, DOI: 10.20858/sjsutst.2019.102.15.
14. Szumska E.M., Jurecki R.S., Parameters influencing on electric vehicle range. “Energies”, Vol. 14, No. 16, 2021, DOI: 10.3390/en14164821.
15. Yadav A.K., Gopakumar K., Krishna R., Umanand L., Bhattacharya S., Jarzyna W., A Hybrid 7-Level Inverter Using Low-Voltage Devices and Operation With Single DC-Link. “IEEE Transactions on Power Electronics”, Vol. 34, No. 10, 2019, 9844–9853, DOI: 10.1109/TPEL.2018.2890371.
16. Majumder M.G., Rakesh R., Gopakumar K., Al-Haddad K., Jarzyna W., A Fault-Tolerant Five-Level Inverter Topology With Reduced Component Count for OEIM Drives “IEEE Journal of Emerging and Selected Topics”, Vol. 9, No. 1, 2021, 961–969, DOI: 10.1109/JESTPE.2020.2972056.
17. Qi J., Lu D.D.-C., Review of battery cell balancing techniques. Australasian Universities Power Engineering Conference (AUPEC), 2014, DOI: 10.1109/AUPEC.2014.6966514.
18. Rodgers L., Zoepf S., Prenninger J., Analysis the energy consumption of the BMW ActiveE field trial vehicles with application to distance to empty algorithms. “Transportation Research Procedia”. Vol. 4, 2014, 42–54, DOI: 10.1016/j.trpro.2014.11.004.
19. Rodgers L., Estimating an Electric Vehicle’s “Distance to Empty” Using Both Past and Future Route Information Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Oregano, 2013.
20. Li J., Wang F., He Y., Electric Vehicle Routing Problem with Battery Swapping Considering Energy Consumption and Carbon Emissions. “Sustainability”, Vol. 12, No. 14, 2020, DOI: 10.3390/su122410537.
21. Goeke D., Schneider M., Routing a mixed fleet of electric and conventional vehicles. “European Journal of Operational Research”, Vol. 245, No. 1, 2015, 81–99, DOI: 10.1016/j.ejor.2015.01.049.
22. Schneider M., Stenger A., Goeke D., The Electric Vehicle-Routing Problem with Time Windows and Recharging Stations. “Transportation Science”, Vol. 48, No. 14, 2014, 500–520, DOI: 10.1287/trsc.2013.0490.
23. Erdogan S., Miller-Hooks E., A Green Vehicle Routing Problem. “Transportation Research Part E. Logistics and Transportation Review”, Vol. 48, No. 1, 2012, 100–114, DOI: 10.1016/j.tre.2011.08.001.
24. Hayes J., de Oliveira R., Vaughan S., Egan M., Simplified Electric Vehicle Power Train Models and Range Estimation. Vehicle Power and Propulsion Conference (VPPC), Chicago, 2011, DOI: 10.1109/VPPC.2011.6043163.
25. Karbowski D., Pagerit S., Calikns A., Energy Consumption Prediction of a Vehicle along a User-Specified Real-World Trip. “World Electric Vehicle Journal”, Vol. 5, No. 4, 2012, 1109–1120, DOI: 10.3390/wevj5041109.
26. Minett C., Salomons M., Daamen W., van Arem B., Kujipers S., Eco-routing: Comparing the fuel consumption of different routes between an origin and destination using field test speed profiles and synthetic speed profiles. IEEE Forum on Integrated and Sustainable Transportation System, Vienna, 2011, DOI: 10.1109/FISTS.2011.5973621.
27. Zhang Y., Wang W., Kobayashi Y., Shirai K., Remaining Driving Range Estimation of Electric Vehicle. IEEE International Electric Vehicle Conference, Greenville, USA, 2012, DOI: 10.1109/IEVC.2012.6183172.
28. Ferreira J., Monteiro V., Afonso J., Data Mining Approach for Range Prediction of Electric Vehicle. Conference on Future Automotive Technology – Focus Electromobility, Germany, 2012.
29. Yu H., Tseng F., McGee R., Driving Pattern Identification for EV Range Estimation. IEEE International Electric Vehicle Conference, Greenville, USA, 2012, DOI: 10.1109/IEVC.2012.6183207.
30. Kopczyński A., Krawczyk P., Lasocki J., Parameters selection of extended-range electric vehicle supplied with alternative fuel. E3S Web of Conference, Vol. 44, 2018, DOI: 10.1051/e3sconf/20184400073.
31. Styler A., Sauer A., Rottengruber H., Learned Optimal Control of a Range Extender in a Series Hybrid Vehicle. IEEE 18th International Conference on Intelligent Transportation System, Gran Canaria, Spain, 2018, 2612–2618, DOI: 10.1109/ITSC.2015.420.
32. Miri I., Fotouhi A., Ewin N., Electric vehicle energy modelling and estimation – A case study, “International Journal of Energy Research”, Vol. 45, No. 1, 2020, 501–520, DOI: 10.1002/er.5700.
33. Chiasserini C.F., Rao R.R., Routing protocols to maximize battery efficiency. MILCOM 2000 Proceedings. 21st Century Military Communications. Architectures and Technologies for Information Superiority (Cat. No.00CH37155), Los Angeles, CA, USA, 2000, DOI: 10.1109/MILCOM.2000.905002.
34. Jeong K.S., Lee W.Y., Kim C.S., Energy management strategies of a fuel cell/battery hybrid system using fuzzy logics “Journal of Power Sources”, Vol. 145, No. 2, 2005, 319–326, DOI: 10.1016/j.jpowsour.2005.01.076.
35. Franke T., Neumann I., Bühler F., Cocron P., Krems J.F., Experiencing Range in an Electric Vehicle: Understanding Psychological Barriers. “Applied Psychology”, Vol. 61, No. 3, 2012, 368–391, DOI: 10.1111/j.1464-0597.2011.00474.x.
36. Strömberg H., Andersson P., Almgren S., Ericsson J., Karlsson M., Nåbo A., Driver interfaces for electric vehicles. AUI2011 Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 2011, 177–184, DOI: 10.1145/2381416.2381445.
37. Cocron J., Expectations and experiences of drivers using an EV: Findings from a German field study. Abstacts of the 27th International Congress of Applied Psychology, Melbourne, Australia, 11–16 July 2010.
38. Hoffman J., Does use of battery of battery electric vehicles change attitudes and behaviour? Abstacts of the 27th International Congress of Applied Psychology, Melbourne, Australia, 11–16 July 2010.
39. Kubik A., Turoń K., Stanik Z., Car-sharing systems vehicles versus taxis in urban transport system – legal requirements, technical service, operation. International Conference on Traffic and Transport Engineering. ICTTE, Belgrade, Serbia, 27–28 September 2018, 923–930.
91
40. Hansen I., Pachl J., Railway Timetabling and Operations, 2nd ed.; Eurailpress: Hamburg, Germany, 2014.

41. Croce A.I., Musolino G., Rindone C., Vitetta A., Traffic and Energy Consumption Modelling of Electric Vehicles: Parameter Updating from Floating and Probe Vehicle Data “Energies”, Vol. 15, No. 1, 2022, DOI: 10.3390/en15010082.
42. Ondruska P., Posner I., Probabilistic Attainability Maps: EfficientlyPredictingDriver-SpecificElectricVehicle Range. IEEE Intelligent Vehicles Symposium (IV), 2014, DOI: :10.1109/IVS.2014.6856572.

43. Liu K., Yamamoto T., Morikawa T., Impact of road gradient on energy consumption of electric vehicles. “Trans-
portation Research Part D. Transport and Environment”, Vol. 54, 2017, 74-81, DOI: 10.1016/j.trd.2017.05.005.
44. Lu L., Han X., Li J., Hua J., Ouyang M., A review on the key issues for lithium-ion battery management in electric vehicles. “Journal of Power Sources”, Vol. 226, 2013, 272–288, DOI: 10.1016/j.jpowsour.2012.10.060.
45. BMW i3. www.bmw.pl/i3 (accessed on 25 February 2022).
46. LE-03MW F&F. www.tme.com/ca/en/details/le-03mw/ energy-meters/f-f/ (accessed on 25 February 2022).
47. BMW. BMW i3 Contents A-Z; Poland, 2008; pp. 1–257.
Popyt na pojazdy elektryczne jest duży ze względu na niskie koszty podróży. Jednocześnie spodziewany jest wzrost zasięgu. Dlatego w niniejszym artykule przeanalizowano różne koncepcje związane z prowadzeniem pojazdu elektrycznego. Scenariusze jazdy zostały podzielone na dwie części. Pierwsza część składała się z czterech etapów: jazdy w cyklu mieszanym, ładowania pakietu bateryjnego, przejazdu bardzo krótkiego odcinka oraz przejazdu odcinków o różnej długości, mniejszej niż maksymalny zasięg teoretyczny. Druga część polegała na przejechaniu odcinka do momentu aktywacji systemu REx. Wyniki przeprowadzonych badań zostały zaprezentowane, a kluczowe ustalenia przedstawiono w sekcji dyskusji.
ORCID: 0000-0002-0397-3313
ORCID: 0000-0003-1431-6201
92 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Praca przedstawia zagadnienie dotyczące pomiaru i analizy zużycia energii w trakcie cyklu wiercenia termicznego. Przedstawiono opar te na tokarce CNC stanowisko badawcze, którego elementem wyposażenia był eksperymentalny układ poboru energii oparty o licznik energii elektrycznej oraz siłomierz. Zastosowane urządzenia pomiarowe pozwalały na rejestrację obciążenia sieci energetycznej, obciążenia napędów obrabiarki, siłę osiową, moment hamujący wiertło, aktualne obroty wrzeciona obrabiarki, pozycję wiertła względem obrabianego materiału i wartości rejestrów parametrów pomocniczych w strategii adaptacyjnego sterowania posuwem. Rozważano dwa przypadki cyklu wiercenia: wykonanie pojedynczego otworu oraz wykonanie szeregu otworów w jednym cyklu. Testowano pięć strategii sterowania posuwem w trakcie cyklu wiercenia, w tym adaptacyjne sterowanie posuwem i rekurencyjną metodę optymalizacji posuwu. Dla porównania wykonano także otwory tradycyjnymi wiertłami krętymi HSS. Na podstawie uzyskanych rezultatów badań można stwierdzić, że metoda wiercenia ciernego może być zaliczona do energooszczędnych metod wykonywania otworów w elementach cienkościennych.
1. Wprowadzenie
Stale rosnący w ostatnich latach trend wzrostu cen energii oraz równocześnie coraz bardziej rygorystyczne przepisy dotyczące ochrony środowiska doprowadziły przedsiębiorstwa do zwracania większej uwagi na poszukiwania efektywnych energetycznie technik wytwarzania i opracowania kompleksowego podejścia metodologicznego do ilościowej analizy zużycia energii. Badanie energochłonności procesów obróbki mechanicznej i termicznej staje się tematem szeroko obecnym w publikacjach techniczno-naukowych. Coraz większe zainteresowanie tą tematyką wydaje się być uzasadnione, w kontekście zrównoważonego rozwoju, preferującego energooszczędne techniki produkcji, jako jeden z jego filarów. Dużą wagę przykłada się obecnie do stosowania coraz bardziej energooszczędnych maszyn i urządzeń, choć zbyt mało uwagi poświęca się wykorzystaniu potencjalnych oszczędności energetycznych, tkwiących w samych procesach formowania materiału. Tego typu badania są często elementem składowym szerszego, zintegrowanego podejścia do modelowania tzw. śladu węglowego, znanego pod akronimem ERWC
(ang. Energy-Resource-Waste-Carbon-footprint) [1]. Obecnie dostępne na rynku mierniki energii, pozwalają na optymalizacja kosztów zużycia energii, a w rezultacie ochronę środowiska naturalnego. Zastosowana w miernikach komunikacja sprzyja integracji z wieloma systemami automatyki. W Katedrze Technologii Maszyn i Automatyzacji Akademii Techniczno-Humanistycznej w Bielsku-Białej podjęto prace badawcze zmierzające do oceny i optymalizacji procesu wiercenia termicznego pod względem zużycia energii, wypełniając w ten sposób istniejącą lukę badawczą. W tym celu zbudowano stanowisko badawcze wyposażone w układ pomiarowy poboru mocy oraz opracowano metodę analizy czynników energochłonnych, pozwalającą na ilościowe określenie ich wpływu.
Wiercenie termiczne (cierne, przepływowe) [2] jako alternatywna metoda wykonywania otworów formowanych na gorąco w arkuszach blach, rurach i cienkościennych kształtownikach, wykonanych z plastycznych stopów metali, wychodzi naprzeciw współczesnym tendencją w budowie maszyn, dążącym do redukcji wagi projektowanej konstrukcji [3]. W trakcie procesu wiercenia termicznego, w wyniku tarcia między wiertłem a przedmiotem obrabianym, następuje wzrost temperatury, co umożliwia odkształcania plastyczne przedmiotu obrabianego w obszarze działania wiertła, najczęściej wykonanego z węglika wolframu. Przemieszczony materiał formuje tuleję i kołnierz (Rys. 1), wydłużając znacząco długość formowanego otworu i w konsekwencji także czynną długość gwintu, gwarantując mocniejsze złącze śrubowe. W typowym cyklu procesu wiercenia termicznego występują następujące etapy (Rys. 2): a) szybki
93 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 93–98, DOI: 10.14313/PAR_247/93
Rys. 2. Kolejne etapy formowania otworu wiertłem termiczny
Fig. 2. The next stages of hole formation with a thermal drill
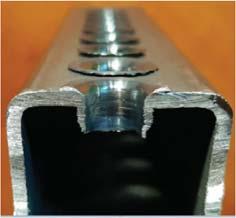
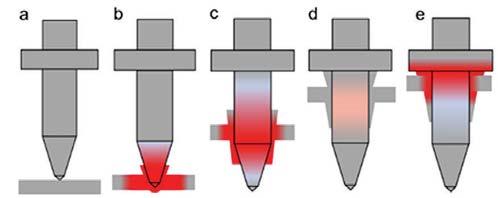
dobieg do punktu początkowego; b) wstępne zagłębianie się w materiał w celu uplastycznienia materiału; c) kształtowanie tulei wyjściowej; d) ruch jałowy wynikający z długości wiertła; e) kształtowanie kołnierza. Istnieje jednak kilka odmian takiego zabiegu. Przykładowo kołnierz może zostać usunięty obróbką mechaniczną w jednym cyklu wiercenia termicznego.
Wiercenie termiczne rozwiązuje problemy łączenia cienkościennych elementów konstrukcyjnych w prosty, ekonomiczny, ekologiczny i efektywny sposób. Obecnie technika wiercenia termicznego szybko zdobywa nowe zastosowania, np. w branży motoryzacyjnej, przemyśle lotniczym, w produkcji urządzeń oświetleniowych, przyrządów medycznych, przemyśle meblarskim, urządzeniach wentylacyjnych, itd. Jej główne zalety to zwiększenie długości czynnej otworu, wzmocnienie wytrzymałości połączenia gwintowego, bezodpadowość, wydajność, długa – do ponad dziesięć tysięcy cykli – trwałość narzędzi, możliwość stosowania do wielu różnych materiałów konstrukcyjnych, proste oprzyrządowanie oraz czyste stanowisko pracy.
W aspekcie wyżej wymienionych korzyści wynikających ze stosowania zabiegów wiercenia termicznego należy zadać pytanie: jak kształtuje się energochłonność procesu wiercenia termicznego w odniesieniu do średnicy wiertła, strategii sterowania posuwem oraz w stosunku do wiercenia klasycznymi wiertłami krętymi wykonanymi ze stali szybkotnącej.
Dostępne prace dotyczące procesu wiercenia termicznego nie udzielają odpowiedzi na powyżej sformułowane pytanie. Prace te dotyczą najczęściej badania i modelowania wpływu różnych wielkości wejściowych, w celu lepszego poznania złożonych zjawisk fizyko-chemicznych towarzyszących temu procesowi, tj.: przepływu materiału, rozkładu temperatury, naprężeń i odkształceń, zużycia narzędzia, itd. Rezultaty tych prac badawczych pozwoliły zoptymalizować kształt narzędzia, nadal jednak brak modeli pozwalających optymalizować prędkość posuwu osiowego narzędzia. Złożoność procesu oraz duża liczba różnorodnych zmiennych procesowych [4] nie pozwoliła również do tej pory na opracowanie teoretycznych modeli, na podstawie których można by estymować zapotrzebowanie na energię w procesie. Z tego też powodu, wszystkie do tej pory wygenerowane modele procesu wiercenia termicznego mają charakter cząstkowy, ograniczając się najczęściej do trzech zmiennych wejściowych i od jednego do trzech parame-
trów wyjściowych. Zakres zmienności parametrów wejściowych w prezentowanych pracach jest często zawężany i nie zawsze uwzględnia technicznie osiągalne i najbardziej ekonomicznie uzasadnione wartości. Wykorzystywane stanowiska badawcze mają istotne ograniczenia techniczne, uniemożliwiające badania szerszego zakresu parametrów procesu. Dodatkowo badania dotyczyły najczęściej zachowania się nowych wierteł, bez analizy wpływu stopnia zużycia wiertła na przebieg i parametry wyjściowe cyklu wiercenia. Do końca niezbadanym zagadnieniem jest analiza termograficzna procesu wykonanego wiertłem nowym i zużytym [5]. Odczuwa się niedostatek badań nad optymalizacją parametryczną procesu wiercenia termicznego dla zwykłej stali oraz stopów aluminium, z punktu widzenia czasu cyklu, trwałości narzędzia, obciążenia napędów obrabiarki czy wydatku energetycznego. Potencjalnego użytkownika interesują aspekty wydajnościowe i ekonomiczne procesu wytwórczego. Byłby zainteresowany więc szybkim doborem warunków obróbki gwarantujących krótki czas cyklu i równocześnie ekonomiczną trwałość narzędzia, wykorzystaniem potencjału produkcyjnego obrabiarki, automatyzacją procesu, kontrolą jego poprawnego przebiegu. Producenci wierteł termicznych informują użytkownika o zalecanych parametrach obróbki, zaznaczając równocześnie, że dla konkretnego przypadku wymagają one weryfikacji, wraz z rosnącym doświadczeniem użytkownika. Dotychczas w masowej produkcji proces wiercenia termicznego realizuje się na specjalizowanych urządzeniach zazwyczaj wyposażonych w jedną oś przesuwną i jedno elektrowrzeciono. Aby rozszerzyć zakres zastosowania tej techniki i równocześnie zautomatyzować cykl wiercenia należałoby w tym celu adaptować uniwersalne obrabiarki, wyposażając je w proste, programowalne kontrolery procesu, np. PLC. W przypadku obrabiarek sterowanych numerycznie brak do tej pory standardowych cykli obróbkowych dedykowanych wierceniu termicznemu.
Optymalizacja parametrów obróbki jest skutecznym sposobem zmniejszenia energochłonności procesu obróbki mechanicznej. W oparciu o podejścia statystyczne, związane z projektowaniem eksperymentów, opracowano różne metody optymalizacji warunków obróbki, opierając się na wyrywkowych badaniach doświadczalnych. Analizę charakterystyki energetycznej procesu obróbki oraz energooszczędną optymalizację parametrów skrawania za pomocą modeli zużycia energii przedstawiono w pracy [7]. Jednak metody te nie mogą być łatwo wykorzystane, gdy cel optymalizacji lub konstrukcja obrabiarki jest modyfikowana. W pracy [8] zaproponowano metodę opartą na symulacji, która wykorzystuje wirtualną obrabiarkę VMT (ang. Virtual Machine Tool) do optymalizacji warunków obróbki. Model VMT ma na celu skoncentrowanie się na szacowaniu zużycia energii podczas obróbki i jest rozwijany poprzez replikację rzeczywistych obrabiarek. Wykorzystano algorytm genetyczny do optymalizacji warunków obróbki w celu zmniejszenia zużycia energii. Zmiany w celu optymalizacji lub konstrukcji obrabiarki można wtedy łatwo uwzględnić. Wyniki testów symulacyjnych pokazują, że całkowite zużycie energii przez obrabiarkę zmniejsza się dzięki optymalizacji o kilkanaście procent.
Autorzy zrealizowali program badań zmierzający do opracowania inteligentnych strategii sterowania procesem wiercenia termicznego, także z punktu widzenia zużycia energii. Cecha inteligentny jest tutaj rozumiana jako zdolność przystosowania się do zmian. Docelowym efektem tych prac było opracowanie użytecznej, rekurencyjnej metody, umożliwiającej łatwą, w praktycznej realizacji, optymalizację posuwu w cyklu wiercenia termicznego.
2. Budowa stanowiska
Stanowisko badawcze do pomiaru zużycia energii w cyklu wiercenia termicznego zostało oparte na tokarce sterowanej nume-
94 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 1. Przekrój otworu wykonanego wierceniem termicznym Fig. 1. Cross-section of a hole made by thermal drilling
rycznie TUG-56. Obrabiarka ta jest pozbawiona urządzeń pomocniczych, takich jak układ pneumatyczny, hydrauliczny, dodatkowe siłowniki czy układ usuwania wiórów, które są głównymi odbiorcami energii w obrabiarkach. Pompa emulsji obróbkowej, w trakcie cyklu wiercenia termicznego, jest nie używana, więc nie zakłóca wyników pomiarów. Stąd należało oczekiwać, że głównym konsumentem energii w zbudowanym stanowisku będzie napęd wrzeciona głównego.
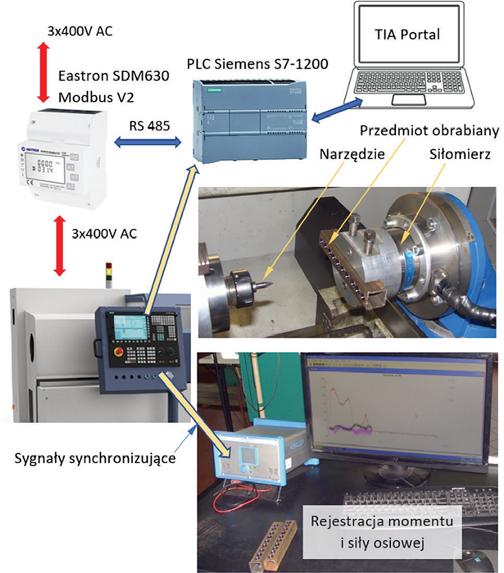
Układy pomiarowe zużycia energii są budowane najczęściej w oparciu o dedykowane liczniki energii oraz układy PLC. Pozwalają one na kwantyfikację sygnałów przy wysokich częstotliwościach próbkowania. Przykładem może być, przedstawiony w pracy [6], układ pomiarowy oparty o zaawansowany analizator parametrów sieci Siemens Sentron PAC4200. W prezentowanym tutaj stanowisku badawczym jako analizator użyto wielofunkcyjny, trójfazowy, dwukierunkowy licznik energii elektrycznej Eastron SDM630 Modbus V2. Pozwala on m.in. na monitoring energii pobieranej z sieci oraz monitoring energii oddawanej do sieci z uwzględnieniem faz na przyłączu. Zastosowanie powszechnie dostępnego elektronicznego licznika energii pozwoliło ograniczyć złożoność i koszt układu pomiarowego przy porównywalnych parametrach dokładności. Do rejestracji mierzonych wielkości użyto sterownik PLC Siemens S7-1200 z modułem komunikacyjnym CB1241. Wymiana informacji pomiędzy licznikiem a sterownikiem PLC realizowana była magistralą RS-485 za pomocą asynchronicznego protokołu Modbus RTU. Modbus RTU jest najczęściej stosowanym obecnie protokołem w sieciach automatyki przemysłowej. Sterownik odczytywał rejestr licznika zawierający chwilową moc trójfazową jaką obrabiarka obciąża sieć. Przy starcie cyklu wiercenia, układ sterowania obrabiarki wystawiał na wyjściu cyfrowym krótki impuls wyzwalający do sterownika i siłomierza w celu synchronizacji zapisu danych i ułatwienia późniejszej ich analizy. Schemat zbudowanego stanowiska zaprezentowany jest na rysunku 3.
Sterowniki Siemens S7-1200 umożliwiają rejestracj wewnętrznych zmiennych dla każdego cyklu pętli programowej za pomocą narzędzia śledzenia (Traces), zawartego w środowisku programistycznym TIA Portal. W trakcie konfiguracji sterownika użyt-
Fig. 4. Waveform of the instantaneous power and the recorded trigger signal
kownik wybiera jakie zmienne mają być rejestrowane. Następnie konfigurator przesyłana je do sterownika. Zewnętrzny sygnał startu rejestracji lub rozkaz z aplikacji rozpoczynają zapis. Dla każdej próbki zapisany jest znacznik czasowy z dokładnością do nano sekund oraz wartości rejestrowanych zmiennych. Rejestracja realizowana jest sprzętowo przez procesor sterownika do jego wewnętrznej pamięci. Zapis danych można zatrzymać z aplikacji lub zatrzymywany jest automatycznie po zapełnieniu pamięci procesora sterownika PLC. Następnie dane przesyłane są do komputera i możliwy jest eksport danych do pliku w formacie CSV (ang. Coma Seperated Value) oraz ewentualna ich analiza w arkuszu kalkulacyjnym.
W celu synchronizacji pomiarów, ułatwiających ich późniejszą analizę, układ sterowania obrabiarki wystawia binarnie, poprzez wyjście cyfrowe, sygnał wyzwalacza (Rys. 4), o czasie trwania 0,3 s. Maksymalne opóźnienie zapisu danych ze strony sterownika PLC to jedna pętla programowa. Wynosi ona maksymalnie 3,5 ms, natomiast minimalna częstotliwość wymiany informacji z licznikiem to około 27 Hz, czyli 37 ms. Producent licznika nie podaje czasu i metody uśredniania mocy chwilowej oraz częstotliwość odświeżania rejestrów, ale na podstawie zmiany wartości mocy przy rozpędzaniu wrzeciona czas ten można oszacować na 0,1 s. Nałożenie na siebie trzech działań asynchronicznych powoduje zmienny czas występowania obszaru z taką samą mocą chwilową, co skutkuje na wykresie zmienną szerokość schodka. Na podstawie danych katalogowych licznika maksymalny czas odpowiedzi na skokową zmianę obciążenia wynosi 1 s, a pomiar energii zawiera się w pierwszej klasie dokładności.
Wstępne pomiary obejmowały pomiar energii potrzebnej do zasilania układu sterowania, chłodzenia napędów i sterowania oraz utrzymywania momentu trzymającego w napędach. Moc jałowa obrabiarki użytej w badaniach wynosi około 0,36 kW przy otwartej osłonie i rozbrojonych napędach oraz około 0,54 kW z momentem trzymającym na silnikach (Rys. 5). Po rozpędzeniu wrzeciona do zaprogramowanej wartości 2400 obr./min pobierana moc ulega zmniejszeniu do 1,7 kW (Rys. 6). Podane wartości są specyficzne dla danej obrabiarki i zaprogramowanych obrotów. Warto mieć świadomość jak duże oszczędności energetyczne można odnieść, ograniczając okresy jałowe w czasie eksploatacji stanowiska produkcyjnego. Na wykresie (Rys. 5) widoczny jest chwilowy zwiększony pobór energii przy uzbrajaniu napędów po zamknięciu osłony w obrabiarce.
Do analizy zużycia energii w trakcie procesu przyjęto następujące założenia:
Energia pobierana przez obrabiarkę w określonym przedziale czasu Δt obliczana jest z zależności (1), gdzie P(t) jest mocą chwilową zarejestrowaną w tym przedziale czasowym. Przy-
Rys. 3. Schemat stanowiska pomiarowego Fig. 3. Scheme of the measuring setup
Rys. 4. Przebieg mocy chwilowej oraz zarejestrowany sygnał wyzwalacza
95
rost czasu obliczany jest jako znacznik czasu próbki bieżącej minus znacznik czasu próbki poprzedniej;
E = P(t) · Δt (3)
Obrabiarka ma możliwość zwrotu energii do sieci elektrycznej podczas hamowania napędów. W obliczeniach energię oddawaną do sieci przyjmuje się ze znakiem ujemnym; Energia netto wrzeciona (napęd główny obrabiarki) EW jest obliczana wg zależności (2), gdzie EWR i EWH oznaczają odpowiednio zmierzoną energię w okresie rozruchu TR oraz hamowania w okresie TH (wartość ujemna). Czas rozruchu TR obliczany jest od opadającego zbocza sygnału wyzwalacza do ustalonego czasu rozpędzania, natomiast czas hamowania odnosi się do okresu od pierwszej do ostatniej zarejestrowanej ujemnej wartości mocy;
EW = EWR + EWH (2)
Energia procesu wiercenia EP obliczona jest jako energia pobierana od stałego punktu czasowego po rozpędzeniu wrzeciona do pierwszej, zarejestrowanej wartości ujemnej, −Energia całkowita cyklu EC to całość energii od pierwszej rejestracji po znaczniku czasowym do pierwszej wartości nieujemnej po zatrzymaniu wrzeciona;
Energia formowania otworu EF (3) to energia całkowita wiercenia minus energia całkowita z eksperymentu bez fizycznego wiercenia EC-NT (wiercenie bez narzędzia), EF =
Czas formowania otworu liczony jest od styku wiertła z materiałem do zakończenia formowania kołnierza. Czas ten nie obejmuje dobiegu narzędzia i wyprowadzania narzędzia z otworu;
Czas całkowity (pełnego cyklu) liczony jest od opadającego zbocza wyzwalacza do końca hamowania wrzeciona.
Wzór (4) na energię formowania może być zastosowany do wszystkich badanych strategii wiercenia termicznego za wyjątkiem adaptacyjnego sterowania posuwem. Energia formowania dla cyklu adaptacyjnego EAC może być jedynie porównywana dla pełnego cyklu z innymi strategiami sterowania posuwem. W ten sposób jesteśmy w stanie określić straty energii EL wynikające z braku optymalne strategii sterowania posuwem:
EL = EAC – EF’, (4)
gdzie EF’ jest energią zużytą w innej strategii sterowania posuwem.
Rysunek 6 przedstawia typowy przebieg zapotrzebowania na energię w cyklu wiercenia termicznego. Na wykresie tym przed-
stawione są dwie rejestracje mocy chwilowej obrabiarki podczas wiercenia wiertłem termicznym z wykorzystaniem strategii schodkowej zmiany posuwu oraz taki sam eksperyment bez fizycznego wiercenia, przy zdemontowanym narzędziu. Cały cykl obejmuje rozruch wrzeciona, cykl wiercenia oraz hamowanie wrzeciona. Ruch dosuwowy do materiału powinien rozpocząć się po osiągnięciu zaprogramowanej wartości obrotów wrzeciona roboczego. Właściwy cykl wiercenia obejmuje dobieg narzędzia, wiercenie i wycofanie narzędzia do pozycji wyjściowej. Dopiero po utracie kontaktu narzędzia z przedmiotem celowe jest wyłączenie obrotów wrzeciona. Na wykresie można zaobserwować, że w trakcie braku kontaktu narzędzia, wykresy obciążenia z narzędziem i bez narzędzia pokrywają się. Różnice w poborze mocy występują w obszarach wzrostu momentu obrotowego. Niewielki wzrost poboru mocy, na początku ruchu dosuwowego, jest spowodowany rozpędzaniem napędu osiowego.
Na wykresie (Rys. 6) można zaobserwować duży obszar obrazujący pobór energii na rozpędzenie wrzeciona. Środkowa część wykresu przedstawia zróżnicowane zapotrzebowanie na moc w czasie formowania otworu, co wynika z zaprogramowanego posuwu, stanu materiału oraz wymiarów wiertła. Końcowa część przedstawia zwrot energii do sieci przy hamowaniu wrzeciona. Sprawność odzysku energii, obliczana jako stosunek energii odzyskanej przy hamowaniu do energii pobranej na rozpędzenie wrzeciona, wynosi około 50 %. W czasie hamowania część odzyskiwanej energii pobierana jest przez układ sterowania numerycznego obrabiarki.
Wykres zarejestrowanej siłomierzem siły i momentu zawiera typowe cechy procesu wiercenia termicznego, takie jak: szczyt siły osiowej występujący przed szczytem momentu obrotowego oraz jednoczesny wzrost tych wartości w końcowej fazie wykonania otworu, przy formowaniu kołnierza. Algorytm adaptacyjny, podobnie jak strategia sterowania posuwem optymalizowana rekurencyjnie, powodują poszerzenie okresów występowania wartości około szczytowych. Skraca to wydatnie czas procesu, jednocześnie gwarantując nie przekraczanie bezpiecznych wartości obciążenia narzędzia.
EC
EC –
–NT (3)
Rys. 6. Zapotrzebowanie na moc w trakcie cyklu wiercenia Fig. 6. Power demand during a drilling cycle
Rys. 5. Moc pobierana przez obrabiarkę w stanie jałowym Fig. 5. The power absorbed by the machine tool when idling
96 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Badania przeprowadzono dla pięciu strategii sterowania posuwem w trakcie cyklu wiercenia:
a) Posuw stały;
b) Posuw zmienny skokowo (zgodny z zaleceniami producenta wiertła);
c) Posuw zmienny liniowo;
d) Posuw zmienny adaptacyjnie metodą on-line;
e) Posuw optymalizowany rekurencyjnie metodą off-line.
W badaniach wykorzystano wiertła termiczne firmy Strojsen o rozmiarach M5 (4,5 mm), M8 (7,2 mm), M10 (9 mm) oraz wiertło firmy Flowdrill 8.2-long. Producenci wierteł zazwyczaj kodują swoje produkty nie średnicami a przeznaczeniem otworu pod daną średnicę gwintu. Wiertło firmy Flowdrill 8.2-long zostało wykonane na specjalne zamówienie do wykonywania tulei pod sworzeń. Do zaprogramowania posuwów zmiennych schodkowo wykorzystano wytyczne firmy Flowdrill w postaci tabeli z prędkościami posuwu na poszczególnych etapach procesu wiercenia oraz prędkością obrotową wrzeciona. W badaniach zachowano proporcjonalny wzrost prędkości obrotowej wiertła w miarę zmniejszania się średnicy wiertła.
Rysunek 8 przedstawia wykresy mocy chwilowej dla procesu wiercenia siedmiu otworów w jednym cyklu. Można zauważyć, że kolejne otwory wykonywane są mniejszym nakładem energii. Związane jest to z silnym nagrzewaniem się wiertła w trakcie kolejnych cykli. Część ciepła z rozgrzanego wiertła przechodzi do materiału w miejscu nowego otworu skracając czas na uplastycznienie się metalu i zmniejszając moment hamujący wiertło.
Rysunek 9 prezentuje zbiorcze wyniki przeprowadzonych pomiarów zużycia energii dla różnych strategii sterowania posuwem. Najlepszy rezultat uzyskano dla strategii sterowania posuwem ustalonym rekurencyjnie, w pierwszych kilkunastu cyklach wiercenia. Wynik ten determinuje najniższa energia procesu EP. Ostatni (żółty) szereg przedstawia zużycie energii odpowiadające uśrednionej wartości dla jednego otworu, w cyklu wiercenia kolejno siedem otworów, z aktywnym sterowaniem adaptacyjnym. Oprócz oczywistych korzyści wynikających z braku konieczności każdorazowego rozruchu i hamowania wrzeciona, dochodzą kolejne. Rozgrzane wiertło łatwiej formuje materiał w pierwszej fazie wiercenia, zmniejsza się także znacząco liczba szoków temperaturowych narzędzia, co powinno mieć pozytywny wpływ na jego trwałość.
5. Wnioski
Zaproponowany układ pomiarowy pozwolił na analizę zapotrzebowania na moc w cyklu wiercenia termicznego, pozwalając zarazem na ocenę różnych strategii sterowania posuwem pod względem zużycie energii.
Rys. 7. Przykład przebiegu posuwu dla wiertła ø8.2: (a) posuw stały, (b) posuw zmienny schodkowo, (c) posuw zmienny liniowo, (d) posuw zmienny adaptacyjnie, (e) posuw ustalony rekurencyjnie
Fig. 7. An example of the feed pattern for a ø8.2 drill: (a) constant feed, (b) step-variable feed, (c) linear-variable feed, (d) adaptive variable feed, (e) recursively determined feed
−Energia netto obliczona z licznika energii jest zbliżona do energii obliczonej z zapisów siłomierza. Można oszacować, że sprawność przekształcania energii elektrycznej na mechaniczną wynosi około 90 %.
Zastosowanie optymalizacji posuwu metodą adaptacyjną (on-line) lub rekurencyjnie (off-line) pozwala na obniżenie zużycia energii 7–19 %.
−Efektywność energetyczna wiercenia termicznego zdecydowanie wzrasta w przypadku cyklu wiercenie kolejno kilku otworów, bez zatrzymania wrzeciona obrabiarki.
Bilans energii na rozpędzenie i hamowanie wrzeciona był zbliżony we wszystkich próbach i wynosił średnio 16,6 kJ, co stanowi ponad pięciokrotność energii netto procesu. Energia oddawana do sieci dochodzi do 50 % energii pobieranej z sieci.
Fig.
Różnica energii całkowitej w poszczególnych próbach, w stosunku do różnicy czasów cykli, daje nam moc strat równą około 1,93 kW, co jest zbliżone do mocy obrabiarki w cyklu jałowym, wynosząca ok. 1,70 kW. Pozwala to wnioskować, że optymalizacja posuwu pozwala zredukować zużycie ener-
Rys. 8. Pobór mocy dla sekwencji wiercenia siedmiu otworów
8. Power consumption for a 7-hole drilling sequence
Rys. 9. Pobór energii dla różnych strategii sterowania posuwem Fig. 9. Energy consumption for different feed control strategies
97
gii w procesie wiercenia termicznego, głównie (w 90 %) ze względu na skrócenie czasu cyklu, a tym samym zmniejsza straty na podtrzymanie obrotów wrzeciona oraz zasilanie układu sterowania i chłodzenia.
5. Szwałek K., Nadolny K., Characteristics of tool used in the friction drilling method, “Journal of Mechanical and Energy Engineering”, Vol. 2, No. 2, 2018, 109–114, DOI: 10.30464/jmee.2018.2.2.109.
1. Afsharizand B., Investigation on quantitative assessment of energy consumption and the associated sustainability performance of CNC milling machines, PhD Theses, Brunel University School of Engineering and Design, 2012.
2. Lisiecki A., Kurc-Lisiecka A., Brząkała P., Paś M., Technologia flowdrill wiercenia i gwintowania bezwiórowego, „Stal Metale & Nowe Technologie”, Nr 5-6/2018, 27–32.
3. Eliseev A., Kolubaev E., Friction drilling: a review, “The International Journal of Advanced Manufacturing Technology”, Vol. 116, 2021, 1391–1409, DOI: 10.1007/s00170-021-07544-y.

4. Stryczek, R., Błaszczak P., Optimal feed rate control strategies for friction drilling, “Facta Universitatis. Ser. Mechanical Engineering”, Vol. 18, No. 4, 2020, 545–564, DOI: 10.22190/FUME200510021S.

6. Lenz J., Kotschenreuther J., Westkaemper E., Energy Efficiency in Machine Tool Operation by Online Energy Monitoring Capturing and Analysis, “Procedia CIRP”, Vol. 61, 2017, 365–369, DOI: 10.1016/j.procir.2016.11.202.
7. Chen X., Li C., Tang Y., Li L., Li H., Energy efficient cutting parameter optimization, “Frontiers of Mechanical Engineering”, Vol. 16, No. 2, 2021, 221–248, DOI: 10.1007/s11465-020-0627-x.
8. Lee W., Kim S.H., Park J., Min B.K., Simulation-based machining condition optimization for machine tool energy consumption reduction, “Journal of Cleaner Production”, Vol. 150, 2017, 352–360, DOI: 10.1016/j.jclepro.2017.02.178.
The work presents the issue of measuring and analyzing energy consumption during a thermal drilling cycle. A research stand based on a CNC lathe was presented, the equipment of which was an experimental energy consumption system based on an electricity meter and a force gauge. The measuring devices used allowed for recording the load on the power grid, the load on the machine tool drives, the axial force, the drill braking torque, the current rotation of the machine tool spindle, the position of the drill in relation to the workpiece and the values of auxiliary parameter registers in the strategy of adaptive feed control. Two cases of a drilling cycle were considered: making a single hole and making a series of holes in one cycle. Five feed control strategies were tested during the drilling cycle, including adaptive feed control and a recursive feed optimization method. For comparison, holes were also made with traditional HSS twist drills. Based on the obtained test results, it can be concluded that the friction drilling method can be included in the energy-saving methods of making holes in thin-walled elements.
Keywords
ORCID: 0000-0003-1770-8243
ORCID: 0000-0003-1662-972X
98 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
W artykule zaprezentowano szereg praktycznych rozwiązań, które zastosowano by przekształcić stacjonarne stanowiska laborator yjne (stosowane w ramach dydaktyki szeroko rozumianej elektroniki analogowej, cyfrowej oraz techniki mikroprocesorowej i systemów wbudowanych) do nauki zdalnej. Zastosowane rozwiązania umożliwiły pracę w warunkach możliwie najbardziej zbliżonych do standardowych zajęć stacjonarnych – z wykorzystaniem rzeczywistych układów i przyrządów pomiarowych, a nie jedynie symulacji komputerowej. Przykłady uruchomionych stanowisk laboratoryjnych to: obsługa silnika krokowego, generowanie sygnału PWM, obsługa elementów stykowych, obsługa magistral SPI i I2C, badanie parametrów dynamicznych bramek logicznych, badanie filtrów aktywnych, badanie parametrów dynamicznych klucza tranzystorowego. Cechą charakterystyczną opisanych rozwiązań jest niski nakład kosztów oraz możliwość szybkiego dostosowania stanowiska stacjonarnego do pracy zdalnej i odwrotnie, co było szczególnie istotne w warunkach pandemii koronawirusa w ostatnich latach i dynamicznych zmian formy zajęć (czasami z tygodnia na tydzień). Zaprezentowany zbiór opisów stanowisk laboratoryjnych może być szczególnie przydatny dla pracowników prowadzących zajęcia na uczelniach technicznych, gdzie kwestia przekazania studentom praktycznych umiejętności jest kluczowa.
Kwestia praktycznego rozwiązania problemu, jakim jest prowadzenie zajęć zdalnych dla studentów nabrała szczególnego znaczenia w ostatnich latach naznaczonych pandemią koronawirusa. Dzięki powszechnemu dostępowi do Internetu możliwe stało się prowadzenie spotkań on-line np. za pomocą platform takich jak MS Teams, Google Meet, czy Discord. Dało to możliwość skutecznego (w sensie technicznym, pomijając aspekty psychologiczno-społeczne, które nie są tematem niniejszej pracy) prowadzenia wykładów. Wymienione platformy umożliwiały także tworzenie interaktywnych testów, zadań, przesyłania sprawozdań, oraz wystawiania ocen wraz z komentarzami. Dzięki temu techniczna realizacja klasycznych ćwiczeń rachunkowych (audytoryjnych) stała się stosunkowo łatwa. Oczywiście osobnym zagadnieniem pozostaje kwestia oceny studentów i przeprowadzenia miarodajnego sprawdzenia ich wiedzy.
Grupą zajęć najtrudniejszą do przeprowadzenia w formie zdalnej są niewątpliwie praktyczne ćwiczenia laboratoryjne pozostające istotą studiów inżynierskich. Oczywiście również w tej grupie spektrum zajęć pozostaje bardzo szerokie – nawet po zawężeniu do jednej dyscypliny naukowej. Stosunkowo proste do realizacji wydają się być przedmioty wymagające do ich przeprowadzenia jedynie komputera z odpowiednim oprogramowaniem (które często jest darmowe albo posiada darmową dystrybucję do celów edukacyjnych).
Problemy pojawiają się, gdy do zrealizowania zajęć wymagany jest specjalistyczny sprzęt (badane elementy i układy, przyrządy pomiarowe). Najprostszym rozwiązaniem tego zagadnienia jest dokonanie samych pomiarów przez prowadzącego zajęcia i udostępnienie studentom danych pomiarowych w celu ich dalszej obróbki i analizy. Takie podejście pozbawia ich możliwości praktycznej nauki obsługi sprzętu i dokonywania pomiarów, a rolę studenta ogranicza do analizy metrologicznej i wyciągnięcia wniosków (co jest trudne, jeżeli nie pracowało się i nie widziało rzeczywistego urządzenia). Nieco lepszym podejściem jest zarejestrowanie filmu prezentującego proces dokonywania pomiarów i zawierającego np. wskazania przyrządów pomiarowych. Takie rozwiązanie, choć w ograniczonym stopniu daje studentowi pogląd na to, jak wygląda praktyczna strona realizowanego przez niego ćwiczenia.
W wielu przypadkach stosuje się programy symulacyjne do analizy numerycznej badanych układów. W przypadku układów elektronicznych należy wymienić PSpice lub LTspice. Korzystając z profesjonalnych pakietów obliczeniowych (np. MATLAB)
99 Pomiary Automatyka Robotyka, ISSN 1427-9126, R. 27, Nr 1/2023, 99–110, DOI: 10.14313/PAR_247/99
możliwa jest także analiza obwodów elektronicznych (i innych obiektów, urządzeń, układów). Zagadnienia dotyczące stosowania symulacji (jako powszechnego dzisiaj narzędzia wykorzystywanego podczas projektowania nowych rozwiązań) często i tak wchodzą w zakres przedmiotów realizowanych w standardowej, stacjonarnej formie [1]. Nie dają one jednak możliwości nauki dokonywania pomiarów i obsługi przyrządów pomiarowych. Przykładowo: dokonanie analizy częstotliwościowej obwodu sprowadza się jedynie do podania początkowej i końcowej częstotliwości, kroku symulacji, oraz charakteru zmian (logarytmiczny bądź liniowy) i uruchomienia symulacji. W rezultacie otrzymuje się gotowe wykresy z charakterystykami amplitudowymi i fazowymi. Poznanie zasad zdejmowania charakterystyk z rzeczywistych układów elektronicznych z wykorzystaniem generatora i oscyloskopu nie jest w takiej formie nauki możliwe.
W przypadku nauki programowania mikrokontrolerów sytuacja wydaje się jeszcze trudniejsza. Wykorzystanie symulatora (np. dla mikrokontrolerów AVR zawartego w środowisku Microchip Studio) jest w zasadzie ograniczone do zasobów wewnętrznych mikrokontrolera. Problematyczne jest poprowadzenie zajęć dotyczących obsługi zewnętrznych układów (np. układy stykowe, silniki, sterowanie multipleksowe wyświetlaczem siedmiosegmentowym itd.).
Najbardziej atrakcyjną propozycją rozwiązania tego problemu jest stworzenie zdalnych laboratoriów (ang. remote laboratories), które umożliwiają studentowi pracę na rzeczywistym sprzęcie. Laboratoria takie dotyczą różnych dziedzin (np. z fizyki [3]) i znane są już od dłuższego czasu, ale ich rola znacząco wzrosła w okresie nauki zdalnej.
W literaturze można odnaleźć znaczną liczbę opracowań systemów zdalnych laboratoriów do nauki układów elektronicznych.
W pracy [4] zaproponowano ciekawy system wykorzystujący komputer jednopłytkowy Raspberry Pi umożliwiający przeprowadzanie eksperymentów z różnych dziedzin np. robotyki, ale także badania układów elektronicznych. Opisane tam systemy laboratoriów zdalnych wykorzystują specjalizowane oprogramowanie (a także sprzęt), co ogranicza ich dostępność. Nieco podobne rozwiązanie przedstawiono w [8].
Zagadnieniu zdalnych laboratoriów, niewymagających dużego nakładu finansowego, poświęcona była praca [5]. Zasadniczą częścią opracowanego systemu była kontrolowana przez połączenie internetowe uniwersalna przełączalna matryca połączeń (ang. switching matrix). Zawierała ona 32 przekaźniki umożliwiające przełączanie podłączonych do nich elementów stanowiących badany układ elektroniczny (np. kondensatory i rezystory pasywnego filtru). Oprócz matrycy system zawierał przyrządy pomiarowe (oscyloskop) i źródła sygnału (generator) również kontrolowane przez sieć internetową. Całość bazuje na popular-
nej płytce rozwojowej ARDUINO MEGA wraz z rozszerzeniem umożliwiającym wykorzystanie złącza RJ45. Jako kolejną zaletę opisanego systemu można podać, że nie wymaga on stosowania komputera PC do kontroli jego pracy.
W pracy [7] rolę generatora, oscyloskopu, regulowanego źródła napięcia i in. pełni autorski system mikroprocesorowy (w zależności od wersji oparty na mikrokontrolerze STM lub AVR) z możliwością komunikacji z komputerem. Zaproponowano tam formę „domowego laboratorium”, w którym student otrzymał płytkę prototypową ze wspomnianym systemem pomiarowym. Dzięki zastosowaniu połączenia wirtualnej sieci prywatnej VPN (ang. virtual private network), dane pomiarowe mogły być wymieniane między studentami a nauczycielem. Zastosowanie popularnych platform mikrokontrolerowych obniżyło znacznie koszty w stosunku do sytuacji, gdy do pomiarów wykorzystywałoby się komercyjne przyrządy pomiarowe. Dostarczenie płytek dużej liczbie studentów wydaje się być jednak sporą trudnością. Mniej jest opracowań opisujących dostosowanie do nauki zdalnej stanowisk do programowania mikrokontrolerów. Ciekawe rozwiązanie laboratoriów (dla mikrokontrolerów rodziny STM) było opisane w [2]. Autorzy proponują tam „odwróconą wersję” laboratorium zdalnego. Polegała ona na tym, że studenci otrzymywali płytkę rozwojową z mikrokontrolerem, dodatkowo wyposażoną w moduł komunikujący się z siecią Wi-Fi, umożliwiający pracę pod nadzorem nauczyciela (opartą o układ esp8266). Przeprowadzona ankieta wskazała, że po zastosowaniu tego rozwiązania wyniki studentów w nauce uległy poprawie. Wadą opisanego systemu, było to, że każdy student musiał otrzymać płytkę (co z oczywistych względów może być kłopotliwe), a laboratorium było „zdalne” jedynie z punktu widzenia nauczyciela.
W publikacji [6] zaproponowano metodę szybkiego dostosowania stacjonarnych stanowisk do programowania mikrokontrolerów oraz części stanowisk z układów elektronicznych do nauki zdalnej. Wykorzystano w nich m.in. kamerę umożliwiającą obserwację badanego obiektu. Dostęp do stanowiska zdalnego odbywał się przez pulpit zdalny udostępniony za pomocą sieci VPN. W artykule tym przedstawiono ogólną ideę, początkowe doświadczenia i odbiór zaproponowanej metody przez studentów. Niniejsza praca jest kontynuacją i rozwinięciem zaproponowanych tam rozwiązań. Prezentuje konkretne propozycje realizacji zdalnych laboratoriów opartych na sprzęcie jak na zajęciach stacjonarnych.
Opracowane stanowiska zdalne miały spełniać następujące założenia:
−umożliwiać studentom pracę w warunkach jak najbardziej zbliżonych do zajęć stacjonarnych, operowanie na rzeczywistym sprzęcie;
−wykorzystywać sprzęt używany na zajęciach stacjonarnych i umożliwiać szybkie przechodzenie z jednej formy zajęć na drugą (stacjonarne na zdalne i odwrotnie), gdy zajdzie taka potrzeba; −nie wymagać znacznych nakładów finansowych.
Ogólna idea stanowiska przedstawiała się następująco: sprzęt wykorzystywany w trakcie zajęć był podłączony do komputera PC, a ten za pośrednictwem połączenia VPN i pulpitu zdalnego był udostępniony dla studentów przebywających w dowolnym miejscu z dostępem do Internetu. Poglądowy schemat blokowy stanowiska zdalnego przedstawiono na rys. 1. Oczywiście w zależności od rodzaju konkretnego ćwiczenia nie muszą występować wszystkie przedstawione tam elementy. Przykładowo, w przypadku badania układu elektronicznego (np. fil-
Rys. 1. Ogólna koncepcja stanowiska zdalnego
Fig. 1. General concept of a remote workstation
100 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 2. Poglądowy schemat obudowy stanowiska zdalnego (a):
1 – kartonowe pudło, 2 – kamera USB, 3 – podkładka umożliwiająca precyzyjne pozycjonowanie kamery, 4 – oświetlenie LED, 5 – złącze oświetlenia LED, 6 – badany układ; rzeczywisty widok wnętrza obudowy (b); rzeczywisty widok zewnętrzny obudowy (c)
Fig. 2. Illustrative diagram

tru aktywnego) nie jest potrzebna jego obserwacja (a także połączenie układu elektronicznego z komputerem), a jedynie obsługa przyrządów pomiarowych. W związku z tym nie jest konieczne wykorzystywanie kamery. Podczas zajęć z programowania mikrokontrolerów sytuacja jest z zasady odwrotna – nie są potrzebne dodatkowe przyrządy pomiarowe, ale konieczne jest użycie kamery umożliwiającej obserwację wyników pracy programu np. diodę LED czy wyświetlacz oraz oczywiście podłączenie programatora umożliwiającego programowanie mikro-
kontrolera. Jak można zauważyć, stworzenie stanowiska zdalnego według przedstawionej idei jest możliwe w oparciu o elementy wykorzystywane podczas zajęć standardowych – tym bardziej, że coraz więcej przyrządów pomiarowych (oscyloskopy, multimetry) ma możliwość współpracy z komputerem PC i wykorzystywania do obsługi dedykowanej aplikacji. Uczelnie wyższe są także wyposażone w szybkie łącza internetowe, a także w swoje własne sieci VPN. Wykorzystana funkcjonalność pulpitu zdalnego (dostępna już w zasadzie w zdecydowanej większości systemów operacyjnych) gwarantuje, że wszystkie czynności wykonywane przez studenta są identyczne jak na komputerze stosowanym podczas zajęć stacjonarnych. Dzięki temu nakłady finansowe i czasowe potrzebne na uruchomienie stanowisk są minimalne. Pewne szczególne rozwiązania dodatkowe, które podnoszą jakość użytkowania zdalnych stanowisk i rozszerzają ich możliwości (w kierunku uzyskania warunków jak najbardziej zbliżonych do rzeczywistych warunków w sali laboratoryjnej) zostaną opisane w kolejnych punktach.
W przypadku obiektów wymagających obserwacji (np. dioda LED, wyświetlacz, silnik krokowy) konieczne jest stworzenie warunków pozwalających na jej prowadzenie w możliwie najwyższej jakości. Pierwszym elementem jest kamera USB. Doświadczenie pokazało, że najlepsze rezultaty daje użycie kamery o manualnie regulowanej ostrości obiektywu. Ważna jest także możliwość precyzyjnej regulacji obserwowanego obszaru, przez umożliwienie przesuwania kamery w płaszczyźnie poziomej. Drugą bardzo istotną kwestią jest uzyskanie prawidłowego oświetlenia. W początkowych próbach korzystano z oświetlenia sali laboratoryjnej, co dawało jednak słabe rezultaty, oraz powodowało duże zużycie energii elektrycznej (szczególnie, gdy stanowiska są dostępne w sposób ciągły). Aby rozwiązać powyższe problemy stworzono obudowę umożliwiającą montaż kamery oraz zapewniającej prawidłowe oświetlenie obserwowanego obiektu. Konstrukcję obudowy oraz jej rzeczywisty wygląd przedstawiono na rys. 2. Obudowę wykonano z kartonowego pudła, jego wymiary są związane z wielkością obserwowanego obszaru (długość i szerokość) oraz z ogniskową zastosowanej kamery (wysokość). Obiektyw kamery osadzony jest ciasno w okrągłym otworze wykonanym w płaskiej, kwadratowej kartonowej podkładce, a ta położona na nieco mniejszym od niej otworze wyciętym w górze obudowy. Umożliwia to precyzyjne pozycjonowanie kamery w płaszczyźnie poziomej w celu ustawienia zakresu obserwowanego obszaru. Oświetlenie w postaci pasków LED umieszczonych w górnej części bocznych ścianek, jest skierowane ku górze obudowy, która wyłożona jest chropowatym białym papierem. Umożliwia to rozpraszanie światła padającego na obserwowany obszar znajdujący się na dole obudowy (eliminacja odbić zaburzających widoczność). Napięcie do zasilania oświetlenia jest pobierane z zasilacza komputera PC (12 V). Jak można zauważyć konstrukcja obudowy jest bardzo prosta, tania i nie wymaga użycia specjalistycznych podzespołów. Raz wykonana obudowa może być wielokrotnie szybko zakładana i zdejmowana w zależności od potrzeb (np. chwilowe wprowadzenie nauki zdalnej).
Pomysł stworzenia mikroprocesorowego układu pomocniczego wynikał z występowania problemu zawieszenia komunikacji USB niektórych typów kamer. Przywrócenie ich funkcjonowania wymagało odłączenia i ponownego podłączenia zasilania (pobieranego z portu USB). Aby zrealizować to w warunkach zdalnych (stacjonarnie konieczne było wyjęcie i ponowne włożenie wtyku USB kamery) zdecydowano się na konstrukcję układu, współpracującego z prostą aplikacją na komputerze PC. Miał on za zadanie odcinać i po chwili przywracać zasilanie kamery (za pomocą klucza tranzystorowego włączonego szeregowo z obwodem zasi-
(a
(c (b
of the remote station enclosure (a): 1 – carton box, 2 – USB camera, 3 – pad for precise camera positioning, 4 – LED lighting, 5 – LED lighting connector, 6 – system under test; real view of the inside of the enclosure (b); real external view of the enclosure (c)
101
lania kamery) po kliknięciu wirtualnego przycisku we współpracującej z układem pomocniczym aplikacji. W późniejszym czasie okazało się, że konieczność „resetu” przez odcięcie zasilania występuje także w przypadku zastosowanego do niektórych zajęć zdalnych oscyloskopu cyfrowego. W jego przypadku wyłączeniu musiało podlegać napięcie sieciowe 230 V, co wymagało oprócz zastosowania kolejnego kanału sterującego, użycia przekaźnika. W końcowym projekcie aplikacji i układu zdecydowano się na stworzenie większej liczby uniwersalnych kanałów wyjściowych pracujących dwustanowo (włącz-wyłącz) umożliwiających podłączenie większych obciążeń np. w postaci przekaźników. Ponadto w układzie pomocniczym stworzono kanał generujący na wyjściu napięcie stałe o zadanej (za pomocą aplikacji) wartości. Wykorzystano w tym celu kanał modulacji szerokości impulsów
mikrokontrolera PWM (ang. Pulse Width Modulation) oraz filtr dolnoprzepustowy. Układ pomocniczy oparto na tanim i popularnym mikrokontrolerze AVR, a aplikację napisano w języku PYTHON. Komunikacja odbywała się za pomocą portu szeregowego (interfejs RS-232, lub wykorzystanie interfejsu USB i wirtualnego portu szeregowego VPN). Na rys. 3. przedstawiono schemat blokowy układu, jego rzeczywisty wygląd oraz widok okna współpracującej z nim aplikacji. Stworzony system KISSE CONTROL (skrót od nazwy Katedry Inżynierii Systemów, Sygnałów i Elektroniki, w której pracują jego twórcy) okazał się być uniwersalny i umożliwił znaczne rozszerzenie dostępnych dla studentów w formie zdalnej stanowisk laboratoryjnych. Niektóre rozwiązania stanowisk zostaną omówione dalej.
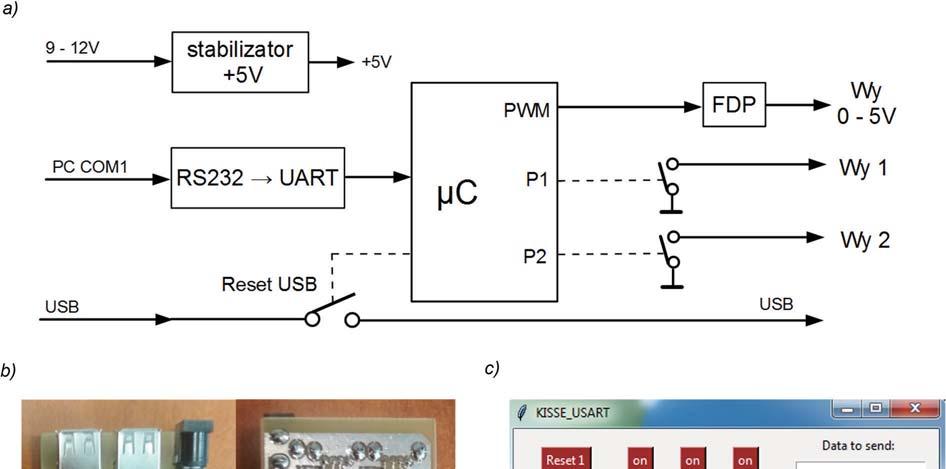 Rys. 3. Układ sterowania KISSE CONTROL: schemat blokowy(a), układ elektroniczny (b), okno aplikacji (c) Fig. 3. KISSE CONTROL system: block diagram (a), electronic circuit (b), application window (c)
Rys. 4. Widok stanowiska zdalnego (od strony studenta) podczas wykonywania ćwiczenia z obsługi wyświetlacza siedmiosegmentowego (źródło: sprawozdanie studenckie)
Rys. 3. Układ sterowania KISSE CONTROL: schemat blokowy(a), układ elektroniczny (b), okno aplikacji (c) Fig. 3. KISSE CONTROL system: block diagram (a), electronic circuit (b), application window (c)
Rys. 4. Widok stanowiska zdalnego (od strony studenta) podczas wykonywania ćwiczenia z obsługi wyświetlacza siedmiosegmentowego (źródło: sprawozdanie studenckie)
102 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Fig. 4. View at the remote station (from the student’s point of view) during the seven-segment display control exercise (source: student report)
Rys. 5. Widok od strony studenta podczas pracy na stanowisku zdalnym przy sterowaniu silnika sygnałem PWM (źródło: sprawozdanie studenckie)
Fig. 5. View at the remote station (from the student’s point of view) with PWM signal control of the motor (source: student report)
Rys. 6. Widok od strony studenta podczas pracy na stanowisku zdalnym przy sterowaniu silnika krokowego (źródło: sprawozdanie studenckie)
Fig. 6. View at the remote station (from the student’s point of view) on stepper motor control (source: student report)
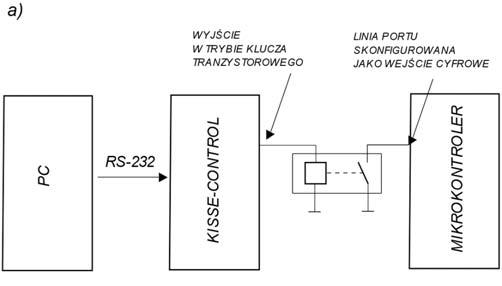
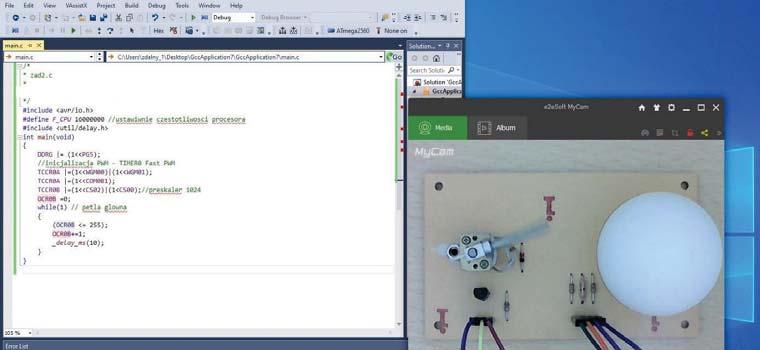
Stanowisko do nauki programowania mikrokontrolerów zrealizowano na bazie zestawu dydaktycznego, stosowanego podczas zajęć stacjonarnych, opartego na mikrokontrolerze ATMEGA2560. Jego programowanie odbywało się z wykorzystaniem interfejsu USB. Umieszczenie zestawu w opisanej wcześniej obudowie (bez konieczności stosowania dodatkowych elementów) umożliwiło wygodną zdalną realizację ćwiczeń, jak obsługa portów wejścia/wyjścia, obsługa układów czasowo-licznikowych (timerów), także z wykorzystaniem przerwań, dynamiczna obsługa czteropozycyjnego wyświetlacza siedmiosegmentowego, obsługa wyświetlacza alfanumerycznego LCD, obsługa portu komunikacji szeregowej asynchronicznej – UART. Komputer obsługujący zestaw dydaktyczny był udostępniony studentom w formie pulpitu zdalnego przez wirtualną sieć prywatną. Na rys. 4. przedstawiono widok zestawu dydaktycznego i środowiska programistycznego od strony studenta pracującego zdalnie (zaczerpnięty ze sprawozdania studenckiego), podczas wykonywania ćwiczenia ze sterowania dynamicznego wyświetlaczem siedmiosegmentowym. Leżący na wyświetlaczu pasek, wycięty z czerwonej folii, pełnił rolę filtru polepszającego czytelność wyświetlanego znaku.
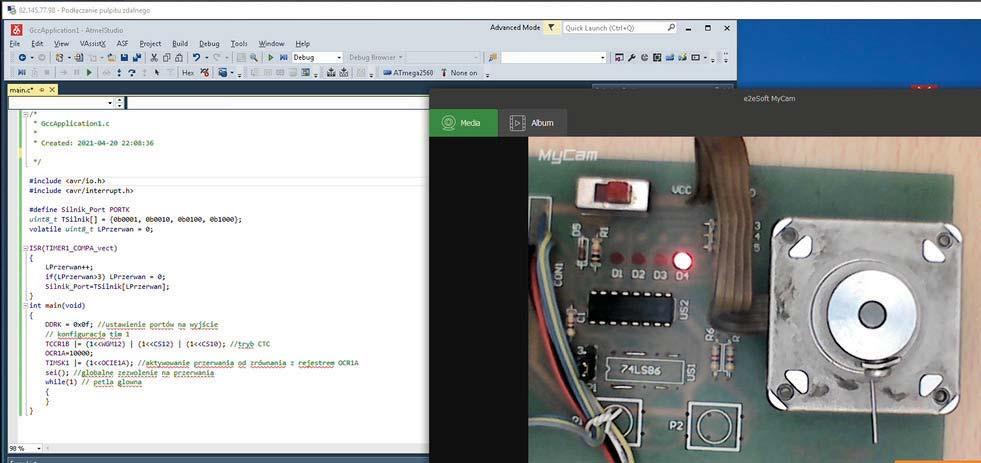
Dzięki wykorzystaniu dodatkowych modułów (używanych podczas zajęć stacjonarnych) możliwie było zrealizowanie ćwiczeń dotyczących sterowania PWM (za pomocą małego silnika szczotkowego z przekładnią i trójkolorowej diody LED) oraz sterowania silnikiem krokowym. Widok stanowiska zdalnego od strony studenta przedstawiono na rys. 5 (sterowanie PWM) oraz rys. 6 (silnik krokowy).
Jak można zauważyć, ćwiczenia realizowane zdalnie nie różniły się od ćwiczeń stacjonarnych. Większej modyfikacji (w
Rys. 7. Schematy stanowisk wykorzystujących układ KISSECONTROL: stanowisko do obsługi elementów stykowych (a), stanowisko do obsługi przetwornika ADC (b)
Fig. 7. Schematics of workstations using the KISSE-CONTROL system: workstation for testing switching elements (a), workstation for using the ADC (b)
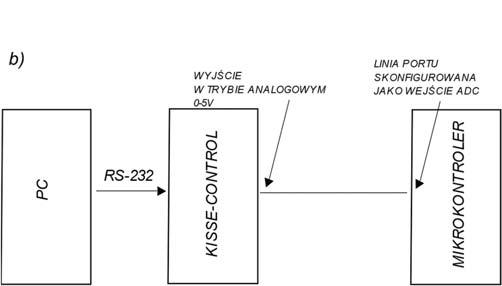
103
celu adaptacji do pracy zdalnej) wymagał temat obsługi przetwornika analogowo-cyfrowego ADC (ang. analog-digital converter ). W warunkach stacjonarnych źródłem stałego napięcia o regulowanym poziomie, podawanego na wejście przetwornika ADC mikrokontrolera był potencjometr. Z oczywistych względów jego regulacja zdalna nie była możliwa. W zdalnej wersji ćwiczenia funkcję regulowanego źródła napięcia stałego pełnił układ pomocniczy KISSE-CONTROL, którego wyjście analogowe połączone było z wejściem przetwornika ADC mikrokontrolera. Nastawianie określonego poziomu napięcia odbywało się za pomocą współpracującej z układem aplikacji na komputerze PC. Pozostała część ćwiczenia (np. napisanie programu realizującego funkcję woltomierza z prezentacją wyniku na wyświetlaczu LED) była realizowana jak w wersji stacjonarnej.
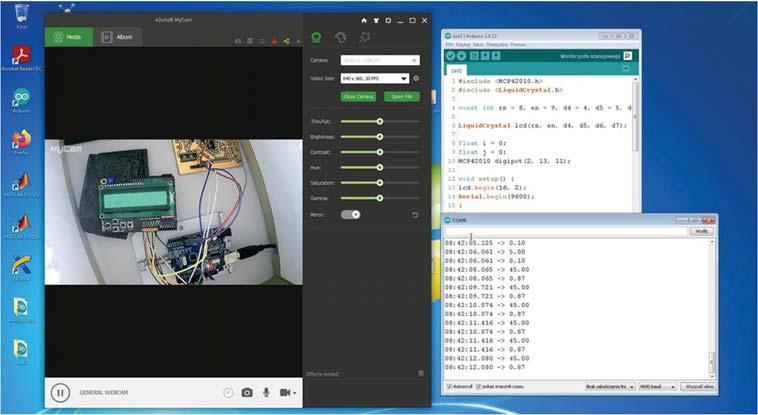
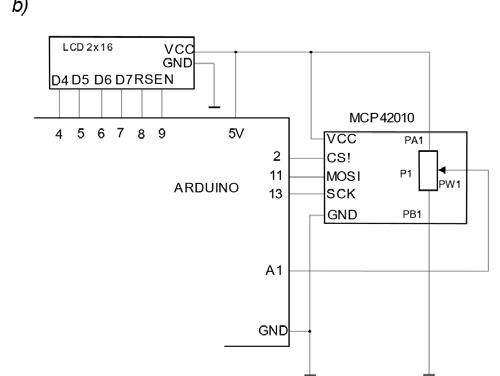
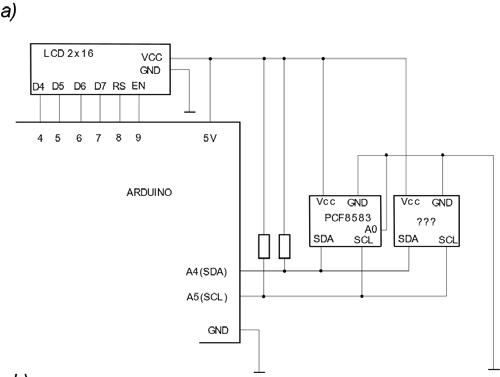

Kolejnym ćwiczeniem, którego realizacja w formie zdalnej była możliwa dzięki zastosowaniu układu KISSE-CONTROL, była obsługa elementów stykowych z programową eliminacją drgań styków. W normalnych (stacjonarnych) warunkach w ćwiczeniu wykorzystuje się element stykowy (podłączony linii portu mikrokontrolera skonfigurowanej jako wejście cyfrowe) w postaci wyłącznika krańcowego, celowo tak dobranego, aby przy załączeniu powstawała znaczna liczba drgań styku. W wersji zdalnej, zamiast wspomnianego elementu, wykorzystano styki przekaźnika (również dobranego tak, aby przy przełączeniu wykonywały znaczną liczbę drgań) załączanego za pomocą układu pomocniczego KISSE-CONTROL sterowanego przez aplika-
cję PC. Pozostała część ćwiczenia (np. realizacja zliczania liczby naciśnięć przycisku z prezentacją wyniku na wyświetlaczu) przebiegała analogicznie jak w ćwiczeniu stacjonarnym. Na rys. 7 przedstawiono schematy opisanych stanowisk współpracujących z układem KISSE-CONTROL.
Opisane stanowisko do nauki programowania mikrokontrolerów zrealizowano w dziesięciu egzemplarzach, aby rozszerzyć ich dostępność studentom. W zależności od potrzeb, część stanowisk może być przystosowana do realizacji ćwiczenia (np. silnik krokowy), a druga do realizacji innego
 Rys. 8. Widok sali laboratoryjnej przystosowanej do pracy zdalnej
Fig. 8. View of a classroom adapted for remote teaching
Rys. 9. Schematy stanowisk do nauki obsługi magistral: I 2C (a) oraz SPI (b) udostępnione do pracy zdalnej
Fig. 9. Schematics of circuits for control the serial buses: I2C (a) and SPI (b)
Rys. 10. Widok (od strony studenta) stanowiska zdalnego do obsługi cyfrowego potencjometru za pomocą magistrali SPI (źródło: sprawozdanie studenckie)
Fig. 10. View at the remote station (from the student’s point of view) for control of a digital potentiometer via the SPI bus (source: student report)
Rys. 8. Widok sali laboratoryjnej przystosowanej do pracy zdalnej
Fig. 8. View of a classroom adapted for remote teaching
Rys. 9. Schematy stanowisk do nauki obsługi magistral: I 2C (a) oraz SPI (b) udostępnione do pracy zdalnej
Fig. 9. Schematics of circuits for control the serial buses: I2C (a) and SPI (b)
Rys. 10. Widok (od strony studenta) stanowiska zdalnego do obsługi cyfrowego potencjometru za pomocą magistrali SPI (źródło: sprawozdanie studenckie)
Fig. 10. View at the remote station (from the student’s point of view) for control of a digital potentiometer via the SPI bus (source: student report)
104 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
(np. sterowanie sygnałem PWM). Na rys. 8 przedstawiono widok sali laboratoryjnej przystosowanej do pracy zdalnej.
Korzystając z omówionej idei stanowisk, w wygodny sposób przeprowadzono także w wersji zdalnej ćwiczenia z obsługi magistral szeregowych typu SPI oraz I2C. Wykorzystano w tym celu popularną płytkę ARDUINO z mikrokontrolerem ATMEGA328, układy potencjometru cyfrowego MCP42010 (komunikacja SPI) oraz zegara czasu rzeczywistego PCF8583 (komunikacja I 2C), a także wyświetlacza alfanumerycznego LCD. Schematy stanowisk przedstawiono na rys. 9. Znakiem zapytania oznaczono układ PCF8574. Oznaczenie takie wynikało z treści jednego z zadań, które polegało na określeniu adresu tego układu, a na jego podstawie, typu nieznanego układu.
Ostatnie stanowisko związane z systemami wbudowanymi stanowi zestaw do badania pulsometru optycznego. W wersji stacjonarnej ćwiczenie polega na podłączeniu analogowego optycznego czujnika pulsu do płytki ARDUINO i napisaniu programów do akwizycji i wizualizacji sygnału oraz wyznaczenie podstawowych parametrów. W ramach pracy zdalnej nie była możliwa rejestracja rzeczywistego sygnału przez założenie czujnika na palec. Aby umożliwić to działanie, zarejestrowano jego cyfrowy fragment (około 3 s) próbkując sygnał z czujnika z częstotliwością 1 kHz i rozdzielczością
Rys. 11. Schemat stanowiska zdalnego z układem generatora sygnału z pulsometru optycznego oraz pomiarem temperatury
Fig. 11. Schematic of remote station with optical pulse meter signal generator system and temperature measurement
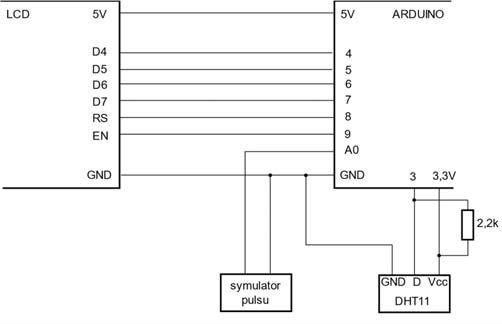
10 bitów. Następnie sygnał umieszczono w pamięci mikrokontrolera STM32F303RET6 (na płytce STM NUCLEO) i użyto wbudowanego przetwornika cyfrowo-analogowego DAC (ang. digital analog converter) do ciągłego odtwarza-
Rys. 12. Środowisko programistyczne z widocznym fragmentem sygnału z symulatora pulsometru optycznego (źródło: sprawozdanie studenckie)
Fig. 12. Programming interface with a visible fragment of the signal from the optical pulse meter simulator (source: student report).
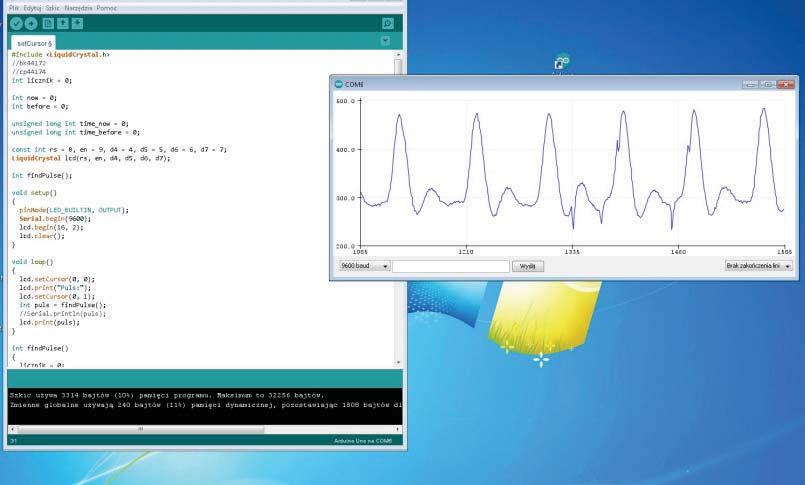
Rys. 13. Widok (od strony studenta) stanowiska zdalnego z układem symulującym sygnał z pulsometru optycznego (źródło: sprawozdanie studenckie)
Fig. 13. View at the remote station (from the student’s point of view) with the system simulating the optical pulse meter signal (source: student report)
105
Rys. 14. Schemat układu pomiarowego parametrów dynamicznych bramki logicznej
Fig. 14. Schematic of the system for measuring the dynamic parameters of a logic gate
nia tego fragmentu sygnału. Stworzony generator (symulator sygnału z pulsometru) dołączono do płytki ARDUINO i udostępniono studentom możliwość akwizycji rzeczywistego sygnału pulsu w czasie rzeczywistym. Schemat układu (do którego podłączono czujnik temperatury DHT11 i wyświetlacz alfanumeryczny LCD) zaprezentowano na rys. 11. Na rys. 12 i 13 przedstawiono stanowisko widziane przez studenta pracującego zdalnie.
W ćwiczeniu badano czasy propagacji bramki logicznej oraz czasy narastania/opadania sygnału wyjściowego bramki. Wykorzystano tu (rys. 14) czterokanałowy oscyloskop cyfrowy z wbudowanym generatorem funkcyjnym (typ DSO4104C).
Rys. 15. Widok stanowiska pomiarowego badania bramek logicznych
Fig. 15. View of the measurement station for testing logic gates

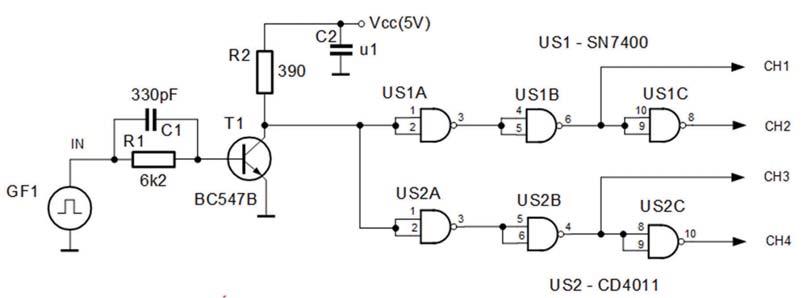
Rys. 16. Przykładowe przebiegi czasowe badania czasu propagacji(źródło: sprawozdanie studenckie)
Fig. 16. Example waveforms of the propagation time measurement (source: student report)
106 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Rys. 17. Schemat stanowisk do badania charakterystyk częstotliwościowych filtru aktywnego II-go rzędu: dolnoprzepustowego (a), górnoprzepustowego (b)
Fig. 17. Schematic diagrams of the measurement systems for measuring the frequency response of a second-order active filter: low-pass (a), highpass (b)
Oscyloskop był obsługiwany przez dedykowaną aplikację umożliwiającą pełne sterowanie pracą urządzenia przez komputer PC.
W układzie pomiarowym (rys. 15) przewidziano badanie bramek dwóch typów technologicznych: bramki rodziny standardowej TTL (US1C) oraz bramki rodziny CMOS (US2C). Sygnał sterujący, wymuszający zmiany wejściowego poziomu logicznego pochodził z generatora funkcyjnego wbudowanego w oscyloskop. Wejściowy inwerter z tranzystorem T1 oraz łańcuch bramek stanowią układ formujący= sygnał wejściowy badanej bramki. Układ został zmontowany na płytce stykowej i przygotowany do pomiarów. Student za pomocą aplikacji oscyloskopowej zdalnie wybierał badaną bramkę, włączając właściwe kanały oscyloskopu oraz dobierał częstotliwość sygnału sterującego.
Student w ramach ćwiczenia uruchamiał zdalnie aplikację obsługi oscyloskopu, rejestrował obserwowane przebiegi i wyznaczał żądane parametry (rys. 16). Wykorzystując układ KISSE-CONTROL współpracujący z przekaźnikiem, umożliwiono zdalne odcinanie zasilania oscyloskopu w przypadku zawieszenia jego pracy.
Rys. 18. Widok stanowiska zdalnego do badania aktywnego filtru dolnoprzepustowego (monitor komputera podczas pracy zdalnej jest wyłączony)
Fig. 18. View of the remote workstation for active low-pass filter testing (computer monitor during remote operation is off)
Rys. 19. Przykładowe zarejestrowane przebiegi podczas badania dolnoprzepustowego filtru aktywnego (źródło: sprawozdanie studenckie)
Fig. 19. Examples of recorded waveforms during testing of a lowpass active filter (source: student report)

107
Stanowisko (rys. 17) skonstruowano z wykorzystaniem płytki używanej na zajęciach stacjonarnych oraz oscyloskopu z generatorem (jak w stanowisku do badania bramek). Jedno stanowisko pozwalało na badanie filtru dolnoprzepustowego, drugie górnoprzepustowego. Oscyloskop współpracował z dedykowaną
aplikacją na komputerze PC, który udostępniony był studentom za pomocą pulpitu zdalnego i połączenia VPN. Nie było konieczności stosowania kamery. Student mógł sterować generatorem sygnału sinusoidalnego, zmieniając jego częstotliwość oraz obserwować sygnały na wejściu i wyjściu filtru, charakterystyk amplitudowych i fazowych oraz określenie częstotliwości granicznej układu. Na rys. 18 przedstawiono skonstruowane stanowiska podczas pracy, a na rys. 19 zarejestrowane przebiegi.
Rys. 20. Schemat stanowiska do badania parametrów dynamicznych klucza tranzystorowego
Fig. 20. Schematic of the circuit for testing the dynamic parameters of a transistor switch
Rys. 21. Przykładowe zarejestrowane przebiegi (kondensator przyspieszający odłączony)
Fig. 21. Example of recorded waveforms (booster capacitor off)
Rys. 22. Przykładowe zarejestrowane przebiegi (kondensator przyspieszający załączony)
Fig. 22. Example of recorded waveforms (booster capacitor on)
108 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Stanowisko (rys. 20) złożone jest jak stanowisko do badania parametrów dynamicznych bramek, wykorzystano oscyloskop z wbudowanym generatorem. Dwa kanały umożliwiały rejestrację sygnałów na wejściu i wyjściu klucza tranzystorowego. Dzięki zastosowaniu układu pomocniczego KISSE-CONTROL, możliwe było załączanie i odłączanie kondensatora przyspieszającego, kompensującego wpływ pojemności złącza baza-emiter tranzystora na szybkość działania klucza. Oscyloskop i współpracujący z nim komputer PC działały w konfiguracji (pulpit zdalny i połączenie VPN) jak w dwóch poprzednich stanowiskach. Na rys. 21 i 22 przedstawiono przykładowe przebiegi zarejestrowane za pomocą oscyloskopu przy załączonym i odłączonym kondensatorze przyspieszającym.
możliwość dostępu do stanowiska i stwarzało konieczność jego ponownego udostępniania.
Dużą zaletą przedstawionych rozwiązań była ich dostępność dla studentów praktycznie w każdym momencie (w ramach ustalonego harmonogramu). W praktyce czas dostępu do stanowiska był dłuższy niż w trakcie klasycznych zajęć stacjonarnych.
Ogólny odbiór takiej formy zajęć przez studentów, szczególnie tych bardziej ambitnych, był pozytywny. Doceniali oni możliwość pracy na rzeczywistym sprzęcie. Była także grupa osób niezadowolona z takiej formy zajęć, podczas której musieli w sposób rzeczywisty wykonać konkretne zadania i pomiary oraz je udokumentować. Takie niezadowolenie było widoczne szczególnie wśród osób mniej ambitnych, które najprawdopodobniej liczyły na wykorzystanie faktu, że zajęcia odbywają się zdalnie i możliwość „łatwego” zdobycia zaliczenia.
Zgłaszane były przypadki zacinania się transmisji danych, ale najprawdopodobniej wynikały one nie z prędkości łącza internetowego uczelni, a problem leżał po stronie łącza internetowego studenta.
Zdalnie obsługiwane stanowiska laboratoryjne były udostępniane studentom całodobowo. Ze względu na dużą liczbę studentów wykonujących ćwiczenia, konieczne było zorganizowanie dostępu do stanowisk bez kolizji czasowych w pracy poszczególnych osób. Udostępnione zostały edytowalne arkusze harmonogramów dostępu do stanowisk z podziałem na dwugodzinne terminy pracy. Studenci rezerwowali w nich godziny swoich ćwiczeń.
Mimo że treści zadań laboratoryjnych były dla wszystkich studentów jednakowe, to w miarę możliwości starano się je różnicować, wprowadzając zależność niektórych parametrów od numeru albumu studenta. Każdy student miał zaprogramować timer mikrokontrolera do odmierzania innego czasu, ustawić inną prędkość transmisji oraz zmierzyć tłumienie filtru analogowego dla innej częstotliwości. Dokumentacja z wykonania ćwiczenia zawarta była w sprawozdaniu. Wymagane było zawarcie w nim (oprócz standardowych elementów związanych z treścią zadania) zrzutu ekranu, który przedstawiał widok środowiska programistycznego z wpisanym (w komentarzu obok kodu programu) danymi studenta oraz widok z kamery z działającym stanowiskiem. W przypadku ćwiczeń „dynamicznych”, np. z silnikami lub ruchomym napisem, wymagane było załączenie nagranego filmu prezentującego działanie programu. Takie podejście miało wymusić na studentach samodzielną pracę.
Komunikacja ze studentami oraz przesyłanie sprawozdań i ich ocenianie odbywało się z wykorzystaniem platformy MS Teams.
Zaprezentowane w artykule stanowiska stanowią jedynie przykłady pokazujące możliwość taniego i efektywnego realizowania niektórych zajęć laboratoryjnych w wersji zdalnej. Korzystając z tej samej idei (obudowa, komputer udostępniony przez pulpit zdalny, ewentualnie kamera) z powodzeniem zrealizowano ćwiczenia np. z obsługi bezprzewodowych modułów Bluetooth, obsługi małego serwomechanizmu, akwizycji i generacji sygnałów z użyciem kart pomiarowych DAQ firmy National Instruments czy oprogramowania bezprzewodowego systemu pomiarowego z układem ESP32 komunikującym się z siecią Wi-Fi. W dwóch ostatnich przypadkach nie było konieczne stosowanie obudowy i kamery, gdyż tematyką zadań była wizualizacja danych pomiarowych, a sama obserwacja elementów systemu pomiarowego nie była niezbędna.
Stosując ideę wykorzystaną w opisanych stanowiskach zdalnych korzystających z oscyloskopu można w podobny sposób zrealizować zdalne badanie innych układów elektronicznych, szczególnie, że znaczna ilość dostępnych na rynku przyrządów pomiarowych (np. multimetry) mają możliwość obsługi za pomocą dedykowanej aplikacji. Możliwość przełączania niektórych połączeń badanego układu (za pomocą systemu KISSE-CONTROL) w znaczny sposób zwiększa ilość możliwych do stworzenia konfiguracji układu przeznaczonych do badania przez studenta.
Należy stwierdzić, że zaprezentowane stanowiska w znacznej mierze spełniły swoją rolę. W różnych etapach pandemii koronawirusa (w latach 2020–2022) umożliwiły zarówno prowadzenie zajęć w formie zdalnej przez długi czas (np. cały semestr) jak i dynamiczne przechodzenie na pracę zdalną na krótszy czas (np. dwa tygodnie). Raz przygotowane obudowy umożliwiały realizacji zajęć zdalnych. W przypadku stanowisk niewymagających użycia kamery przystosowanie do nauki zdalnej było jeszcze szybsze. Problemy związane z zacinaniem pracy kamery i oscyloskopu skutecznie rozwiązano dzięki zastosowaniu układu KISSE-CONTROL. Pewną trudność stanowiła konieczność zgłaszania administracji informatycznej uczelni adresów IP komputerów przeznaczonych do pracy zdalnej dla studentów. Dodatkowo występowały przypadki dynamicznej zmiany udostępnionego już adresu, co blokowało studentom
Pomimo że przedstawione rozwiązania zapewniały możliwość pracy na rzeczywistym sprzęcie, to należy zauważyć, że nie są w stanie oddać w pełni możliwości dostępnych na zajęciach stacjonarnych. Wśród studentów wracających z zajęć zdalnych widać było szczególnie braki w umiejętnościach takich jak dokonywanie połączeń między elementami badanego układu na podstawie schematu czy podłączanie przyrządów pomiarowych np. sond oscyloskopu. Wydaje się, że umiejętności te są możliwe do zrealizowania wyłącznie na zajęciach stacjonarnych. Mimo tej oczywistej wady należy uznać, że opisane rozwiązania znacznie rozszerzają możliwości nauki zdalnej (szczególnie w porównaniu do programów symulacyjnych).
1. Campos N., Nogal M., Caliz C., Juan A.A., Simulation-based education involving online and on-campus models in different European universities, ”International Journal of Educational Technology in Higher Education”, Vol. 17, No. 8, 2020, DOI: 10.1186/s41239-020-0181-y.
109
2. Jacko P., Bereš M., Kováčová I., Molnár J., Vince T., Dziak J., Fecko B., Gans Š., Kováč D., Remote IoT Education Labo-
ratory for Microcontrollers Based on the STM32 Chips, ”Sensors”, Vol. 22, No. 4, 2022, DOI: 10.3390/s22041440.
3. Laouina Z., Ouchaouka L., Elkebch A., Moussetad M., Radid M., Khazri Y., Asabri A., Manufacturing and Developing Remote Labs in Physics for Practical Experiments in the University, „Advances in Intelligent Systems and Computing”, Vol. 1231, 2020, Springer, Cham., DOI: 10.1007/978-3-030-52575-0_16.
4. Letowski B., Lavayssière C., Larroque B., Schröder M., Luthon F., A Fully Open Source Remote Laboratory for Practical Learning, ”Electronics”, Vol. 9, No. 11, 2020, DOI: 10.3390/electronics9111832.
5. Mostefaoui H., Benachenhou A., Benattia A.A., Design of a low cost remote electronic laboratory suitable for low bandwidth connection, ”Computer Applications in Engineering Education”, Vol. 25, No. 3, 2017, DOI: 10.1002/cae.21815.
6. Raczyński M., Remote laboratory classes in a COVID pandemic situation. Example of subjects: Microcontroller programming and electronic circuits, ”The International Journal of Electrical Engineering & Education”, 2021, OnlineFirst, DOI: 10.1177/00207209211004219.
7. Svatos J., Holub J., Fischer J., Sobotka J., Online teaching at CTU in Prague aka university under COVID restrictions, ”Measurement: Sensors”, Vol. 18, 2021, DOI: 10.1016/j.measen.2021.100121.


8. Yala A., Korkmaz H., Buldu A., Sarikas A., Development of a remote laboratory for an electronic circuit design and analysis course with increased accessibility by using speech recognition technology, ”Computer Applications in Engineering Education”, Vol. 29, No. 4, Special Issue: Distance learning, MOOCs and globalisation of engineering education, 2021, DOI: 10.1002/cae.22340.
The paper presents some practical solutions that have been used to convert stationary laboratory workstations (used in the teaching of analog and digital electronics, microcontroller programming and embedded systems) to remote learning. The presented solutions enabled students to work in conditions similar to standard teaching in classroom – using real circuits and measuring instruments. Examples of the laboratory workstations are: stepper motor control, generation of a PWM signal, reading information from switches, using SPI and I2C buses, measuring of dynamic parameters of logic gates, measuring of active filters, measuring of dynamic parameters of a transistor switch. A characteristic feature of the described solutions is the low cost and the possibility of quickly adapting the stationary workstation to remote work (and vice-versa), which was particularly important under the conditions of the coronavirus pandemic in recent years and dynamic changes in the form of teaching method. The presented ideas can be useful for teachers working at technical universities, where the issue of providing practical skills to students is crucial.
Keywords
ORCID: 0000-0002-4106-6802
ORCID: 0000-0003-3889-2027
110 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Marta Kraszewska, Wojciech Kraszewski
Jadwiga Wojtas
Streszczenie: W artykule zaprezentowano funkcjonalności oraz możliwości zastosowania platformy narzędziowej SELF. Omówiono cztery zdefiniowane warstwy platformy oraz przedstawiono proces wdrożenia rozwiązania oraz integrację poszczególnych warstw. Przedstawiono rynek systemów ERP w Polsce oraz dostępne na rynku alternatywne rozwiązania. Zaprezentowana platforma SELF, stworzona w modelu SaaS, jest jednym z kluczowych narzędzi technologicznych wprowadzonych w firmie Soneta w celu wdrożenia efektywnej metody organizacji pracy wewnątrz samego przedsiębiorstwa oraz z jego siecią autoryzowanych partnerów.
1. Wprowadzenie
Istotnym elementem rozwoju każdej jednostki jest wdrożenie efektywnej metody organizacji pracy, obejmującej również optymalny model pracy z firmami partnerskimi tego przedsiębiorstwa. Taki projekt transformacji organizacji może obejmować szereg istotnych obszarów, wśród których warto wymienić standaryzację czy automatyzację procesów, skuteczną i efektywną komunikację wewnątrz samej organizacji jak i z jej partnerami, rozwijanie i dzielenie się wiedzą, czy sam sposób rozwoju, wdrażania i weryfikacji nowych rozwiązań w wymienionych obszarach.
Celem niniejszego artykułu jest zaprezentowanie wyników wdrożenia platformy narzędziowej SELF (ang. Soneta Elevation LifeCycle Framework), będącej jednym z kluczowych rozwiązań technologicznych w celu wprowadzenia optymalnego modelu pracy w przedsiębiorstwie Soneta. Prezentowana platforma SELF jest usługą w modelu chmurowym, oferującą dodatkowe rozwiązania użytkownikom oprogramowania ERP enova365. Działania realizowane były w ramach pro-
jektu badawczego dofinansowanego z Funduszy Europejskich.1 Głównym celem projektu było wzmocnienie synergii działań w zakresie wytwarzania oprogramowania między jednostką wiodącą – firmą Soneta, a jej siecią partnerską.
Początki systemów MRP/ERP sięgają lat pięćdziesiątych XX wieku, kiedy to rozpoczęto wdrażanie systemów opartych o metodę planowania potrzeb materiałowych MRP (ang. Material Requirements Planning). Na przestrzeni kolejnych lat powstawały coraz to nowsze systemy i metody zarządzania, zawierające dodatkowe funkcjonalności i obejmujące swym zakresem inne obszary przedsiębiorstwa, poza sferą materiałowego przygotowania produkcji [1]. Obecnie systemy ERP (ang. Enterprise Resource Planning) są rozwiązaniem do zarządzania zasobami przedsiębiorstwa w każdym jego obszarze, integrującym różne sfery przedsiębiorstwa przy użyciu zaawansowanych technik, wykorzystywane w wielu sektorach rynku [2, 3].
Również często ma miejsce ich integracja z systemami APS (ang. Advanced Planning and Scheduling) lub MES (ang. Manufacturing Execution System) [4].
1 111
Nowoczesne systemy ERP korzystają z rozwiązań w chmurze. Niesie to za sobą szereg korzyści, w tym tych związanych z bezpieczeństwem danych oraz efektywniejszym ich przetwarzaniem, również dzięki wykorzystaniu technologii Przemysłu 4.0 [5, 6]. Istotnym aspektem jest sam proces wdrożenia systemu ERP w organizacji [7], a sama implementacja wpływa na zmianę kompetencji i środowiska pracy poszczególnych grup pracowniczych, np. księgowych wykorzystujących proponowane rozwiązania w swojej codziennej pracy [8].
Rynek systemów ERP w Polsce składa się z trzech segmentów. Pierwszy obejmuje rozbudowane systemy, o wielu modułach, dużej skalowalności, wyposażone w rozwiązania dla różnych branż. W tym segmencie operuje dwóch producentów – SAP i Oracle. Oprogramowanie biznesowe przez nich oferowane daje duże możliwości dostosowania do potrzeb wymagających klientów, ale ze względu na szerokie podejście do zarządzania przedsiębiorstwami są to rozwiązania, które niekoniecznie przystają do logiki biznesowej systemów ERP. Ci sami producenci dostarczają też systemy dla drugiego segmentu, który obejmuje rozwiązania o mniej rozbudowanych funkcjonalnościach i mniejszym zakresie branżowym, dedykowane głównie firmom dużym i średnim. Do innych producentów w tym obszarze rynku można zaliczyć: Microsoft, Epicor, Infor, Comarch, Rekord, BPSC, Symfonia. Oprogramowanie dostarczane firmom dużym ma szereg funkcjonalności a metodyka, według której jest tworzone, dostosowana jest do innej skali biznesu. Ostatni segment to rozwiązania dedykowane firmom małym i średnim, które dostarczają przeważnie producenci lokalni tacy jak: Comarch, Soneta, Streamsoft, Asseco Business Solutions. Rozwiązania oferowane przez lokalnych dostawców systemów ERP w większości charakteryzują się dobrą architekturą i powstają w oparciu o zdefiniowane know-how. Jednakże w większości są to systemy o ograniczonych możliwościach rozbudowy funkcjonalności. Mniejsi producenci oprogramowania, szukając dla siebie miejsca na rynku, coraz częściej oferują architekturę zorientowaną na konkretne usługi i obsługę ściśle określonych procesów biznesowych, a także systemy dedykowane, dostosowane do potrzeb konkretnego klienta. Łącznie na polskim rynku działa około 40 producentów.
Według najnowszego raportu firmy Gartner, nadal prognozowany jest wzrost wartości globalnego rynku aplikacji chmurowych SaaS na poziomie 16,8 % w 2023 r. Przewidywane nakłady finansowe na ten rodzaj usługi mają osiągnąć poziom 195 mld USD w 2023 r. (dla porównania 146 mld w 2021 r. oraz 167 mld w 2022 r.) [10]. Z kolei w raporcie firmy CMT Advisory, w którym przeanalizowano światowe transakcje fuzji i przejęć dla spółek działających w modelu SaaS w okresie 2019–2021, odnotowano skumulowany roczny wskaźnik wzrostu w analizowanym okresie na poziomie 86,4 % i przewiduje się, że tempo wzrostu transakcji zarówno pod względem liczby, jak i wartości, będzie nadal w trendzie wzrostowym [11]. Ta wysoka aktywność transakcyjna na rynku SaaS wynika z dwóch czynników. Z jednej strony inwestorzy strategiczni chcą konsolidować rynek, aby zwiększać w nim swój udział. Z drugiej strony inwestorzy finansowi, którzy widząc duży potencjał tego rynku, rozpoczynają budowę własnych platform lub też zwiększają wartość swoich platform poprzez przejęcia innych podmiotów.
Bez wątpienia ciągły rozwój rynku SaaS oraz globalna digitalizacja sprawia, że przedsiębiorstwa oferujące rozwiązania typu Software as a Service zwiększają swą atrakcyjność, dostosowując się jednocześnie do rosnących oczekiwań i wymagań swoich klientów.
Punktem wyjścia do wdrożenia platformy SELF (ang. Soneta Elevation LifeCycle Framework) w przedsiębiorstwie Soneta było poszukiwanie optymalnego poziomu komunikacji i synergii działań w zakresie wytwarzania oprogramowania pomiędzy Sonetą a jej partnerami, w szczególności wytwarzanych rozwiązań komplementarnych (zwanych dodatkami) dla klientów przez otwarte API (ang. Application Programming Interface) systemu enova365. Efektem projektu jest kompleksowe rozwiązanie do wspierania cyklu wytwarzania rozszerzeń do systemu informatycznego enova365 oferowanego przez firmę, który dostępny jest dla klientów firmy w wersji przeglądarkowej, desktopowej oraz na aplikację mobilną (Android, iOS). Rozwiązanie enova365 to kompleksowy system ERP, który wspiera różne obszary działania przedsiębiorstw, tj. sprzedaż i CRM, handel i magazyn, finanse i księgowość, majątek trwały, kadry i płace, business intelligence, produkcję, procesy czy projekty i dokumenty.
Oprogramowanie jako usługa SaaS (ang. Software as a Service) to model udostępniania oprogramowania w chmurze, który jest szeroko stosowany przez firmy dostarczające oprogramowanie. W modelu tym dostawca rozwija i utrzymuje aplikacje chmurowe, zapewnia ich automatyczne aktualizacje i udostępnia oprogramowanie swoim klientom za pośrednictwem Internetu [9]. Umożliwia to klientom optymalizację kosztów, w miejsce utrzymywania systemów i oprogramowania lokalnie, ponoszą koszt licencji związanej z dostępem do koniecznych zasobów zlokalizowanych w chmurze. Pierwsze zastosowania modelu SaaS pojawiły się w latach 90. XX w., kiedy to zaczęto wprowadzać ideę architektury wielodostępowej umożliwiającej wielu klientom dostęp do danej aplikacji i zaniechanie instalacji oprogramowania lokalnie.
Model SaaS jest intensywnie rozwijany i aktualnie nowoczesne aplikacje chmurowe mogą obejmować różne obszary biznesowe i łączyć je razem, tj. procesy finansowe, zasoby ludzkie, zaopatrzenie, łańcuch dostaw, rozwiązania handlowe, marketingowe, sprzedażowe czy szkoleniowe w jeden ekosystem.
Rozwiązanie SELF to webowa platforma komunikacji, za pośrednictwem której autoryzowani partnerzy komunikują się z organizacją Soneta w zestandaryzowany sposób. Autoryzowany partner ma dostęp do różnorodnych informacji (m.in. list swoich klientów, wykorzystywanych przez nich licencji enova365, list zgłoszeń serwisowych i informacji związanych z prowadzonym procesem wsparcia, list rejestracji własnych rozwiązań w usłudze weryfikacyjnej platformy SELF). Partnerzy wymieniają i zdobywają informacje m.in. o wytworzonych rozwiązaniach sieci partnerskiej (repozytorium dodatków), najczęściej zadawanych pytaniach przez innych partnerów i odpowiedziach/rozwiązaniach oferowanych przez dedykowany Dział Wsparcia w firmie Soneta.
Celem platformy SELF jest stworzenie centrum współpracy z siecią partnerów firmy (klientów), a cztery wyszczególnione jej warstwy realizują założenia oferowanych rozwiązań, metodyk i standardów dla poszczególnych procesów (rys. 1). W przypadku rozwiązań dodatkowych dotyczących głównego produktu oferowanego przez firmę tj. systemu informatycznego enova365, model współpracy między Sonetą a jej siecią
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
partnerską opiera się na standardach projektowo-programistycznych, które realizowane są przez przygotowane narzędzia (Software Development Kit SDK, Soneta Platform Developer, Soneta.Test). Zaproponowane rozwiązania nie tylko upraszczają tworzenie dodatków i dbanie o ich jakość, ale umożliwiają także współpracę pomiędzy Sonetą i jej partnerami w ramach weryfikacji jakości dodatków, co pozwala planować dalsze działania w celu budowania rozwiązań pokroju certyfikowanych sklepów dodatków.
Warstwa Propagacji Wiedzy stanowi repozytorium wiedzy dla aktualnych i potencjalnych nowych klientów. Zastąpiła dotychczasową dokumentację, dystrybuowaną w plikach PDF oraz jako drukowane podręczniki. Ta umieszczona w chmurze Microsoft Azure platforma gwarantuje stały dostęp do aktualnych informacji o systemie, które są na bieżąco uzupełniane przez Sonetę. W ramach dostępu do platformy zdefiniowane są cztery poziomy uprawnień dostępu dla autoryzowanych partnerów firmy Soneta i ich pracowników, dostosowane do potrzeb danego rodzaju użytkownika.
W ramach Warstwy Propagacji Wiedzy, użytkownik otrzymuje dostęp do artykułów i wiedzy, która pokieruje jego działaniami krok po kroku, zapewni wysoką jakość opracowywanych przez niego rozwiązań i wesprze w rozwiązywaniu problemów u klientów. Ma on również dostęp do bazy FAQ najczęściej zadawanych pytań, dostęp do opisu przypadków i sposobów ich rozwiązania, oraz dostęp zarówno do obszernej wiedzy programistycznej, jak i merytorycznej (rys. 2).
W części Dokumentacja znajduje się podstawowa dokumentacja do systemu enova365 stanowiąca tzw. podręczniki użytkownika. Partnerzy mogą tworzyć własne bazy wiedzy, które w przyszłości będzie można dołączać do platformy SELF w warstwie Bazy Wiedzy jako dodatkowe źró dła danych.
Warstwa Wiedzy to obszar na platformie SELF, w którym dostępne są wszystkie zagadnienia związane z wytwarzaniem nie tylko rozwiązań, ale również i procedur, najlepszych praktyk i standardów współpracy. Propagowana jest idea uczenia się wśród pracowników firmy jak i partnerów. Przygotowywane są materiały na Platformę eLearningową, która pomaga szerzyć i zdobywać wiedzę zainteresowanym.
W Warstwie Komunikacyjnej zostały wyodrębnione dwa obszary, reprezentujące odpowiednio komunikację z użytkownikami platformy (Pulpit Partnera) oraz komunikację programistyczną przy wytwarzaniu kodu (narzędzia do komunikacji w zespole Scrum).
Pulpit Partnera został przygotowany w oparciu o moduł CRM (ang. Customer Relationship Management) i Pulpit Kon-
trahenta systemu enova365 oraz dodatki Licencje i System Wsparcia w celu realizacji w pełnym wymiarze komunikacji pomiędzy partnerami Sonety a Sonetą. Proponowane rozwiązanie zawiera szereg funkcjonalności, w tym również dostęp do rozszerzonego wsparcia producenta enova365, tj. pomoc producenta, możliwość generowania zgłoszeń z problemami lub pytaniami, na które odpowiedzą specjaliści enova365, konsultacje merytoryczne i programistyczne ze specjalistami enova365, możliwość składania sugestii do działania oprogramowania, co zapewnia realny wpływ na kierunek rozwoju użytkowanego oprogramowania.
Jeśli chodzi o narzędzia do komunikacji w zespole Scrum, platforma oferuje dostęp do Microsoft Teams. Użytkownik może komunikować się z innymi członkami zespołu poprzez prowadzenie konwersacji i video spotkania, ma również możliwość udostępniania im plików. Każdy dokument, którymi wymieniają się członkowie zespołu zapisywany jest w chmurze, a jeśli pliki są typu Word, Excel oraz PowerPoint możliwa jest ich jednoczesna edycja przez kilka osób. Obszar roboczy umożliwia integrację za pomocą botów łączników oraz kart (rys. 3). Z rozwiązania można korzystać za pośrednictwem przeglądarki, aplikacji klienckiej lub aplikacji mobilnej.
Warstwa Metodyczno-Narzędziowa ma na celu zapewnienie dostępu do najlepszych metod budowania rozwiązań partnerskich. Swym zakresem obejmuje dostęp do zestawu narzędzi wspierających wdrożenia, dostęp do zestawu procedur, które podpowiedzą odpowiednie działania do efektywnej pracy oraz dostęp do zestawu technik popartych doświadczeniem i wiedzą. Wśród szeregu narzędzi dostępnych w ramach platformy warto wymienić AzureDevOps Services w formie zestawu usług chmurowych. Użytkownik otrzymuje konfigurowalny do własnych potrzeb i elastyczny system do projektowania i prowadzenia prac w ramach zespołów z ukierunkowaniem na elastyczne podejścia typu Agile czy Scrum. Takie podejście polegające na iteracyjnym wytwarzaniu rozwiązań informatycznych z koncentracją na szybkim dostarczaniu kluczowych war-
 Rys. 1. Schemat funkcjonalny platformy SELF Fig. 1. Functional diagram of the SELF platform
Rys. 2. Struktura Warstwy Propagacji Wiedzy Fig. 2. Knowledge propagation layer structure
Rys. 1. Schemat funkcjonalny platformy SELF Fig. 1. Functional diagram of the SELF platform
Rys. 2. Struktura Warstwy Propagacji Wiedzy Fig. 2. Knowledge propagation layer structure
Rys. 3. Dodawanie nowych rozszerzeń za pomocą botów, łączników oraz kart
Fig. 3. Adding new extensions using bots, connectors, and cards
tości biznesowych dla klienta, w oparciu o częstą współpracę i komunikację z odbiorcą rozwiązania i jego interesariuszami, jest efektywnym modelem pracy nad nowymi propozycjami rozwiązań informatycznych. Narzędzie AzureDevOps Services wdrożono do prowadzenia procesów projektowych, produkcyjnych i analitycznych w Soneta. Proponowane podejście pozwala na szybkie i elastyczne dostosowanie budowanego rozwiązania do zmieniających się warunków biznesowych i oczekiwań odbiorcy rozwiązania.
Do innych ciekawych rozwiązań należy Microsoft AzureDevOps Board, które ułatwia zarządzanie pracami i wymaganiami, jak również mierzenie postępu realizacji projektu, czy też Azure Test Plans, które umożliwia planowanie, monitorowanie oraz wykonywanie testów dla przygotowanych planów i zestawów testowych (rys. 4).
Istotnym narzędziem jest Azure Repos & Pipelines wspomagające automatyzację budowania artefaktów rozwiązania podczas developingu jak i wydania rozwiązania. Azure Repos służy do hostowania prywatnych repozytoriów Git oraz do obsługi kontroli wersji, natomiast Azure Pipelines wdraża ciągłą integrację i ciągłe dostarczanie dla wybranej aplikacji i platformy.
W ramach platformy użytkownicy mają dostęp do Soneta SDK. Jest to narzędzie do budowania projektów informatycznych kompatybilnych z enova365. Soneta.MsBuild.SDK jest przygotowanym przez Soneta zestawem narzędzi wspomaga-
jących tworzenie dodatków dla sytemu enova365. Pozwala to automatycznie skonfigurować projekt oraz uzupełniać projekty dodatku o niezbędne elementy potrzebne do współpracy z oprogramowaniem enova365. Dokumentacja oraz sposób użycia narzędzia znajduje się na oficjalnym koncie GitHub. Z kolei SDK (ang. Software Development Kit) jest to zestaw narzędzi dla programistów niezbędnych w tworzeniu aplikacji z danej biblioteki.
Warstwa Weryfikacyjna umożliwia autoryzowanym partnerom na sprawdzenie swoich rozwiązań biznesowych na platformie SELF, zapewniając niezawodność, wysoką jakość dedykowanych rozwiązań biznesowych i wysoką ich kompatybilność z bazowym systemem enova365. Repozytorium rozwiązania musi być umieszczone w jednym z możliwych lokalizacji (Azure DevOps Repos, GitHub, GitLab, Bitbucket). Twórca rozwiązań biznesowych może swoje repozytorium dodatku zarejestrować w usłudze weryfikacyjnej z poziomu Pulpitu Partnera. W ramach dostępnych funkcjonalności, autoryzowany partner ma możliwość skorzystania z usługi weryfikacji kodu dodatków, analizatorów konfiguracji czy testów wydajnościowych przygotowanego przez siebie rozwiązania, które powinno być kompatybilne z oprogramowaniem enova365.
Interesującym rozwiązaniem jest fakt, że rejestracja w usłudze pozwala autoryzowanemu partnerowi na zweryfikowanie
Rys. 4. Monitorowanie procesu testowania
Fig. 4. Monitoring the testing process

POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
kodu źródłowego rozwiązania dedykowanego z nową wersją oprogramowania tj. kodem źródłowym systemu enova365, który nie został jeszcze wydany publicznie (rys. 5). Taka weryfikacja odbywa się automatycznie w momencie ogłoszenia przez Soneta ustabilizowania źródeł nowej planowanej (tzw. wersja Beta) do wydania wersji enova365. Następuje to w okresie 2–4 tygodni przed publikacją nowej wersji. Jest to bardzo dogodne rozwiązanie dla partnera, ponieważ w automatyczny sposób może on sprawdzić czy kod źródłowy rozwiązania dedykowanego kompiluje się z nową, jeszcze niewydaną, wersją enova365. Może również przed wydaniem wersji zareagować i poprawić ewentualne błędy i ostrzeżenia wynikające z procesu kompilacji i dostosować dodatek do nowej wersji enova365 tak, aby równocześnie z wydaniem zaplanowanym przez Soneta, także był w stanie dostarczyć klientowi poprawnie działające rozszerzenie do enova365. Autoryzowany partner może również wykonać przygotowane wcześniej testy własnego rozwiązania z jeszcze niewydaną wersją enova365 i odpowiednio wcześniej zareagować na nieudane testy. Dodatkowo może uzyskać informację dotyczącą jakości i struktury kodu własnego rozwiązania w oparciu o statyczne analizatory kodu przygotowane przez Soneta. Wyniki wszystkich wymienionych działań będą widoczne automatycznie po wykonaniu przebiegu weryfikacji w Pulpicie Partnera w formie odpowiednich raportów z wynikami, zostanie również wystałe automatycznie powiadomienie na maila o wykonaniu przebiegu weryfikacji.
Istotnym elementem procesu wdrożenia poszczególnych warstw były przeprowadzone testy, które objęły programistów oraz analityków firmy Soneta, a także wybraną grupę zewnętrzną. Testy te zostały wykonane pod kątem technicznym, wydajności czy zużycia zasobów w chmurze, jak i od strony biznesowej. Podjęte działania polegały również na zintegrowaniu ze sobą poszczególnych warstw docelowej platformy i opracowaniu prototypu platformy SELF, jego testach i usprawnieniach oraz opracowaniu dokumentacji technicznej. W szczególności podjęte aktywności zawierały prace implementacyjne wybranych narzędzi do projektowania i ewidencjonowania funkcjonalności, scenariuszy użycia, zadań implementacyjnych, scenariuszy testowych i testów automatycznych, do automatycznego kompilowania i testowania, a także wydawania rozszerzeń.
Przeprowadzone testy obejmowały również testy zewnętrzne platformy SELF. Przebiegały one w 5 głównych etapach:
Dobór grupy testującej: Do przeprowadzenia testów wytypowano 15 firm partnerskich. Dla zgłoszonych osób kontaktowych (pracowników partnera) zostały przygotowane dostępy do środowiska testowego, które umożliwiały zalogowanie się do Pulpitu Partnera.

 Rys. 5. Rola usługi weryfikacyjnej w przełomach technologicznych (na przykładzie .Net 6)
Fig. 5. The role of the verification service in technological breakthroughs (on the example of .Net 6)
Rys. 6. Schemat zgłaszania problemu przez partnera w trakcie zewnętrznych testów wdrożeniowych
Fig. 6. Scheme of reporting the problem by the partner during external implementation tests
Rys. 5. Rola usługi weryfikacyjnej w przełomach technologicznych (na przykładzie .Net 6)
Fig. 5. The role of the verification service in technological breakthroughs (on the example of .Net 6)
Rys. 6. Schemat zgłaszania problemu przez partnera w trakcie zewnętrznych testów wdrożeniowych
Fig. 6. Scheme of reporting the problem by the partner during external implementation tests
Szkolenie: Dla testerów zostało zorganizowane szkolenie on-line, na którym przedstawiono podstawowy zakres funkcjonalny Pulpitu Partnera.
Dokumentacja: Po szkoleniu zostały przesłane do partnerów materiały oraz dokumentacja w formie instrukcji opisująca podstawowe funkcjonalności Pulpitu Partnera.
Testy (3 tygodnie): W ramach testów partnerzy wprowadzali przykładowe zgłoszenia serwisowe (błędy, propozycje nowych funkcji, zgłoszenia wdrożeniowe), na które odpowiadali za pośrednictwem systemu wybrani konsultanci Działu Wsparcia w firmie Soneta (rys. 6).
Konfiguracja narzędzi: Przez cały czas testów partnerzy zgłaszali uwagi i propozycje zmian, przydatnych do aktualizacji w narzędziach.
dzy, metodologii, po narzędzia – w wygodnej formule dostępu do usługi w modelu chmurowym. Wśród wielu proponowanych rozwiązań i propozycji, ciekawym podejściem wdrożonym na platformie SELF jest możliwość wzajemnego wspierania się i uczenia od siebie poprzez analizę przypadków i rozwiązań oferowanych przez inne jednostki w sieci partnerskiej. Inną, ważną funkcjonalnością jest opcja weryfikacji kodu źródłowego rozwiązania dedykowanego z nową wersją oprogramowania tj. kodem źródłowym systemu enova365. Biorąc pod uwagę aktualne trendy rynkowe, dostępność propozycji konkurencyjnych, rozwój funkcjonalności systemów ERP oraz nowych technologii, zaprezentowane podejście do współpracy z klientami jest rozwiązaniem perspektywicznym, wychodzącym naprzeciw oczekiwaniom potencjalnego odbiorcy produktu.
Wśród alternatywnych, obecnych na rynku rozwiązań, można wymienić oferty proponowane przez firmy Comarch i Asseco Poland Wapro.
Firma Comarch to producent oprogramowania obecny na rynku od ponad 20 lat, dostarczający systemy ERP dla dużych, średnich i małych firm. Firma posiada rozpoznawalną markę i rozbudowaną sieć dystrybucji produktów. Produktem skierowanym bezpośrednio do firm sektora MŚP jest Comarch ERP Optima. Jest to system składający się ze zintegrowanych modułów służących do obsługi różnych obszarów działalności przedsiębiorstwa m.in. faktury, handel, serwis, środki trwałe, obieg dokumentów. System działa też w modelu cloud computing, ale możliwość ta ograniczona jest do określonych obszarów m.in. fakturowania, księgowości, płac i kadr. System współpracuje z aplikacjami zewnętrznymi, dzięki czemu można go zastosować w branżach o specyficznych wymaganiach. Zintegrowane aplikacje uzyskują certyfikat zgodności z Comarch ERP Optima. Są one jednak dodatkiem, za który w większości trzeba zapłacić.
Z kolei Asseco Poland Wapro to firma oferująca m.in. grupę systemów do zarządzania ERP przeznaczonych dla małych i średnich przedsiębiorstw w zakresie wsparcia procesów w działach związanych z finansami i księgowością, kadrami i płacami, magazynem, sprzedażą itp. Proponowany system posiada charakter modułowy co sprawia, że jest dostosowywany do potrzeb oraz wielkości danego przedsiębiorstwa. Funkcjonalność systemu dostępna jest również w modelu SaaS, co oznacza, że rozwiązanie jest przechowywane i udostępniane za pomocą Internetu w tzw. chmurze. System zapewnia automatyzację oraz integrację procesów biznesowych, przy zachowaniu spójności przechowywanych danych. Możliwy jest dostęp do niego za pomocą urządzeń mobilnych. System ERP firmy Asseco Wapro umożliwia też definiowanie własnych algorytmów, struktur i składników płacowych za pomocą dostępnej warstwy programistycznej, dzięki czemu możliwy jest indywidualny rozwój i rozbudowa warstwy aplikacyjnej.
Do innych przedsiębiorstw oferujących na polskim rynku rozwiązania klasy ERP należy zaliczyć: Unit4 Polska, Macrologic, Simple, Symfonia.
1. Dudek-Dyduch E., Systemy informacyjne zarządzania produkcją. Zagadnienia wybrane. Wydawnictwo POLDEX, Kraków 2002.
2. Kucharska E., Grobler-Dębska K., Baranowski J., Bauer W., Kashpruk N., Systemy ERP w energetyce – możliwości i wyzwania. „Przegląd Elektrotechniczny”, R. 2022, Nr 11, 2022, 239–242.
3. Grobler-Dębska K., Kucharska E., Żak B., Baranowski J., Domagała A., Implementation of demand forecasting module of ERP system in mass customization industry — case studies. „Applied Sciences” (Basel), Vol. 12, No. 21, 2022, 1–20. DOI: 10.3390/app122111102.
4. Kucharska E., Grobler-Dębska K., Gracel J., Jagodziński M., Idea of Impact of ERP-APS-MES Systems Integration on the Effectiveness of Decision Making Process in Manufacturing Companies, Communications in Computer and Information Science, Vol. 521, Springer, Cham, 2015, 551–564, DOI: 10.1007/978-3-319-18422-7_49.
5. Baranowski J., Kucharska E., Bauer W., Grobler-Dębska K., Kashpruk N., Kraszewska M., Mularczyk R., Piskor-Ignatowicz C., Dudek A., Dworak D., Kapusta J., Kawa K., Analiza danych i optymalizacja w Przemyśle 4.0, „Nauka, technika, technologia”, Wydawnictwa AGH, Kraków 2022, tom 5, 43–52, DOI: 10.7494/978-83-67427-00-5_3.
6. Tongsuksai S., Mathrani S., Integrating Cloud ERP Systems with New Technologies Based on Industry 4.0: A Systematic Literature Review, IEEE Asia-Pacific Conference on Computer Science and Data Engineering (CSDE), IEEE, Piscataway, 2022, 1–6, DOI: 10.1109/CSDE50874.2020.9411570.
7. Strzębicki, D., Uwarunkowania rozwoju systemów ERP w przedsiębiorstwach. Zeszyty Naukowe SGGW, Polityki Europejskie, Finanse i Marketing, Vol. 17, No. 66, 2017, 161–169. DOI: 10.22630/PEFIM.2017.17.66.13.
8. Wielicki D., Nowacki T., Rozwój systemów ERP i ich wpływ na zawód księgowego, Prace Naukowe, Uniwersytet Ekonomiczny w Katowicach, 2020, Rachunkowość XXI wieku, 30–39.
9. https://www.oracle.com/pl/applications/what-is-saas/
Zaprezentowane rozwiązanie SELF to kompleksowa platforma narzędziowa udostępniona w modelu SaaS, która wspiera autoryzowanych partnerów firmy Soneta w codziennej pracy. W platformie SELF partner odnajdzie wsparcie na różnych poziomach i w różnych formach, poczynając od dostępu do wie-
10. https://www.gartner.com/en/newsroom/pressreleases/2022-10-31-gartner-forecasts-worldwide-publiccloud-end-user-spending-to-reach-nearly-600-billion-in-2023
11. https://cmt-advisory.pl/analizy-i-raporty/sektor-firm-dzialajacych-w-modelu-saas-analiza-aktywnosci-transakcyjnejma-w-latach-2019-2021/
POMIARY•AUTOMATYKA•ROBOTYKANR1/2023
Abstract: In the article the functionalities and possibilities of using the SELF tool platform (Soneta Elevation LifeCycle Framework) are presented. The four defined layers of the platform are discussed, the process of implementing the solution and the integration of individual layers is presented. The market of ERP systems in Poland and alternative solutions available on the market are also discussed. The presented SELF platform, created in the SaaS (Software as a Service) model, is one of the key technological tools introduced in Soneta to implement an effective method of work organization within the firm and with its network of authorized partners.

Keywords
ORCID: 0000-0001-7270-5120
mgr Jadwiga Wojtas

ORCID: 0000-0002-0328-418X
ORCID: 0000-0002-6732-4873

118 POMIARY•AUTOMATYKA•ROBOTYKANR1/2023