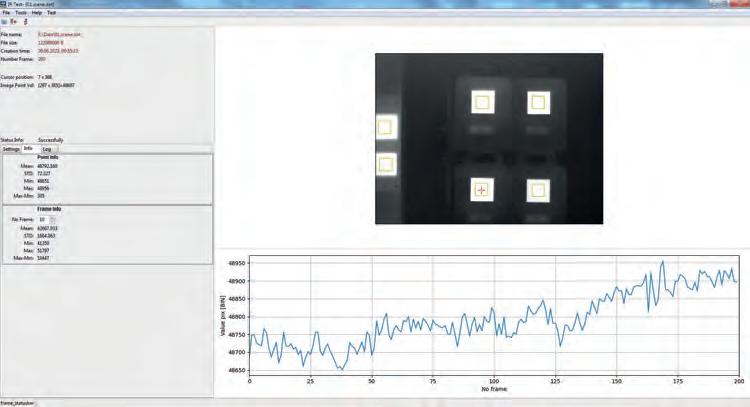
Evaluation of RMS Current in AC Power Wires Using a High-Speed Infrared System W numerze:
Ewa Chodakowska, Andrzej Polecki
Cross-National Comparison of Technology Innovation Capabilities in Automation and Robotics
Piotr Bojarczak, Waldemar Nowakowski
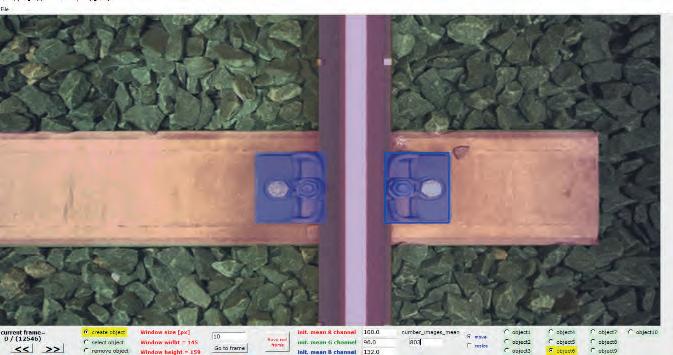
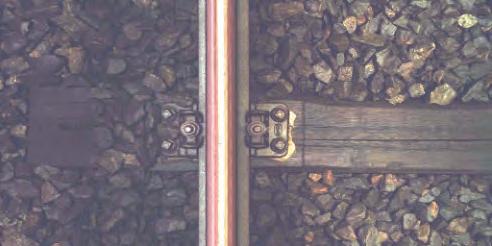
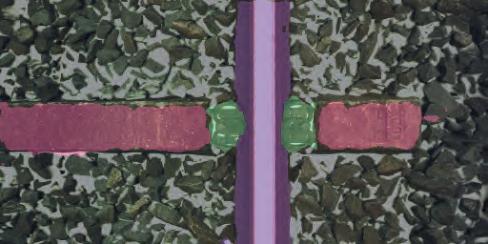
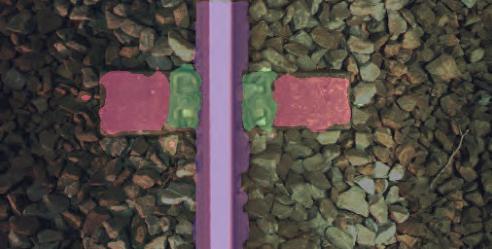
Automatyczna diagnostyka elementów toru kolejowego z użyciem sieci neuronowych głębokiego uczenia
Jacek G. Puchalski, Janusz D. Fidelus, Paweł Fotowicz
Analiza pełzania w przetwornikach momentu siły dla turbin wiatrowych 41
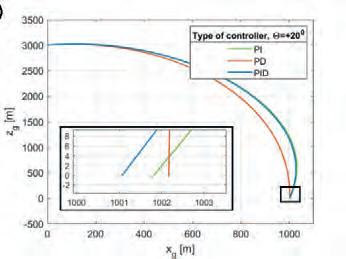
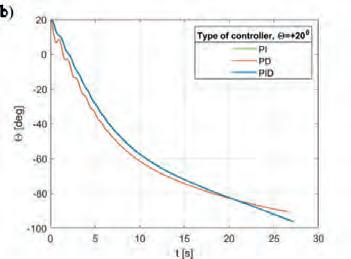
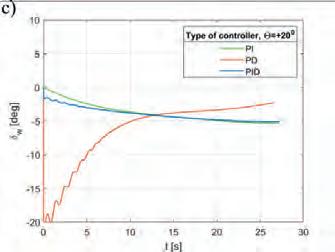
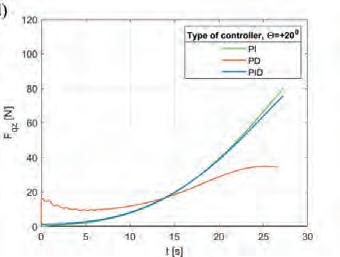
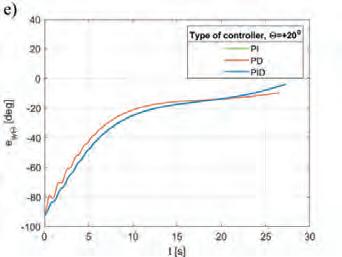
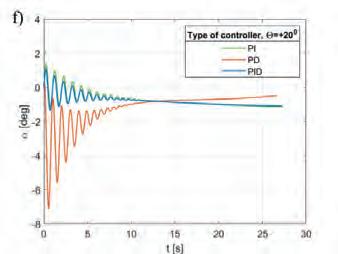
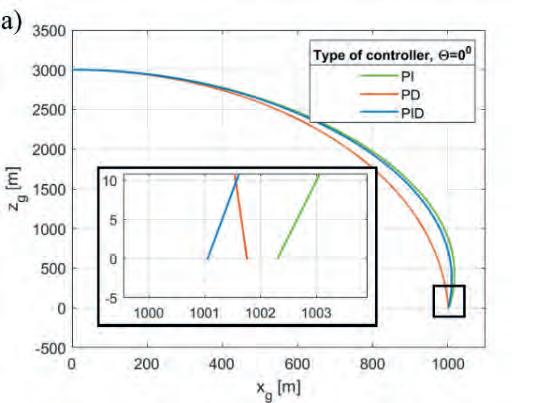
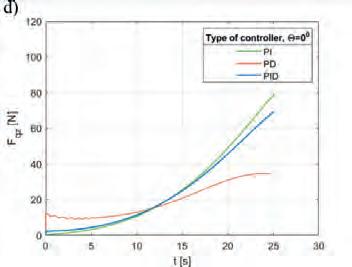
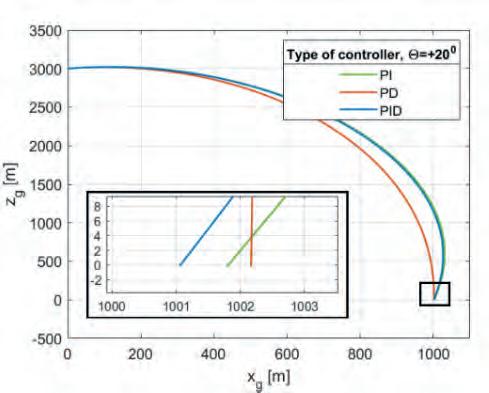
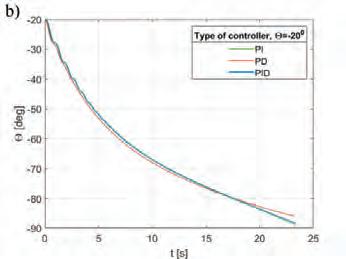
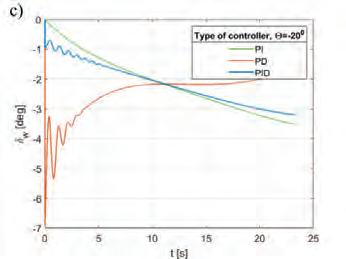
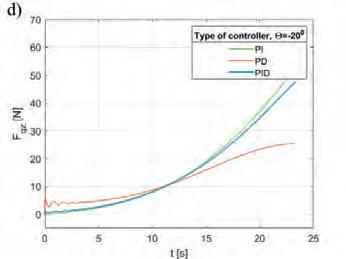
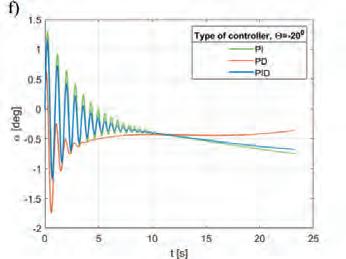
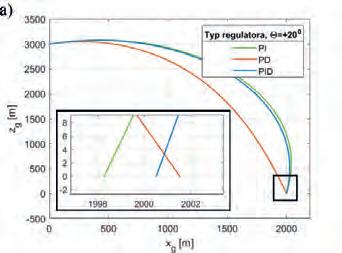
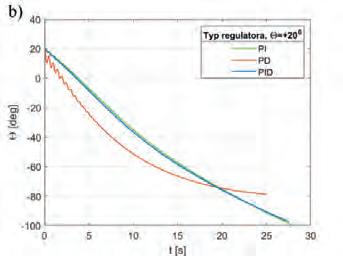
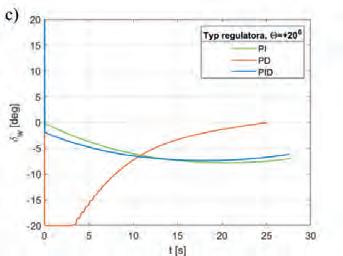
Marta Grzyb, Zbigniew Koruba
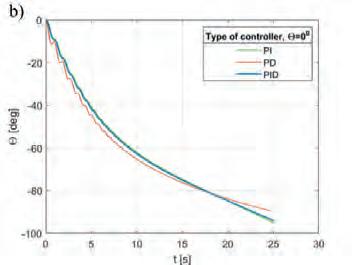
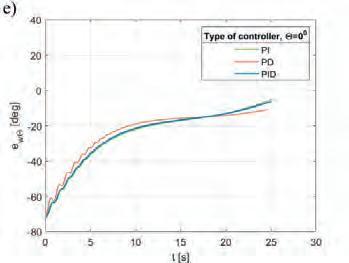
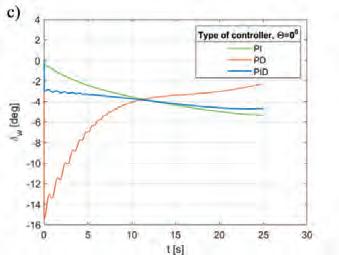
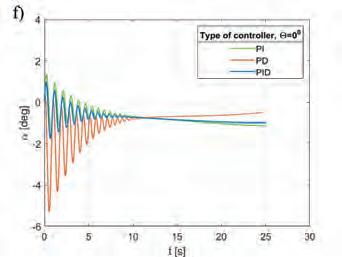
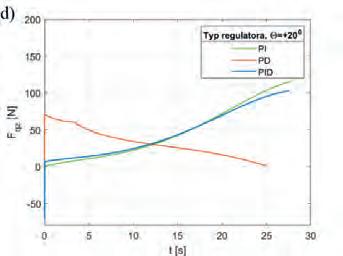
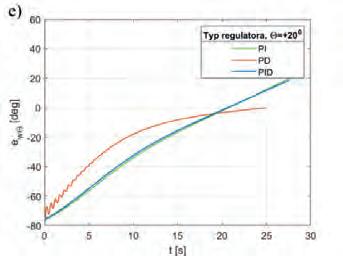
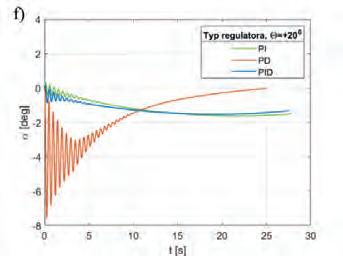
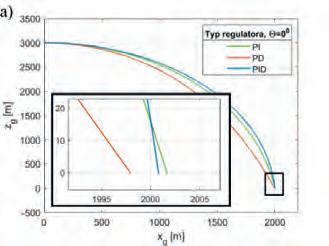
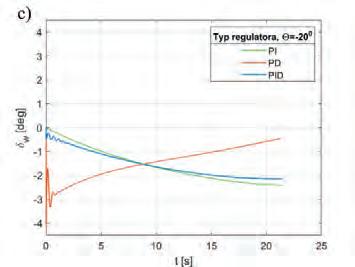
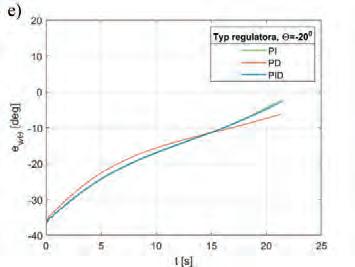
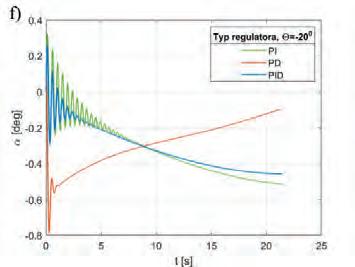
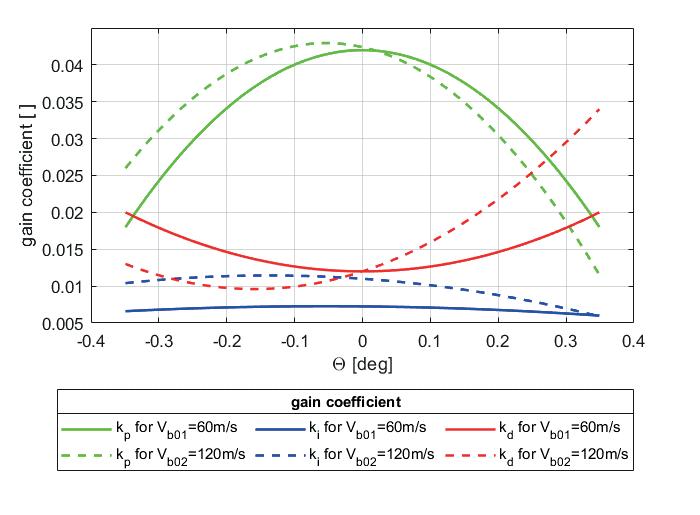
Comparative Analysis of the Guided Bomb Flight Control System for Different Initial Conditions 53
Jan Kierski, Hubert Graczyk
Modeling and Identification of Electromechanical Actuators for the ILR-33 AMBER Rocket 61
Błażej Torzyk, Bogusław Więcek
Rok 28 (2024) Nr 3(253)
ISSN 1427-9126, Indeks 339512
Redaktor naczelny
prof. Cezary Zieliński
Zastępca redaktora naczelnego dr inż. Małgorzata Kaliczyńska
Zespół redakcyjny dr inż. Jerzy Borzymiński
prof. Wojciech Grega – automatyka prof. Krzysztof Janiszowski dr inż. Małgorzata Kaliczyńska – redaktor merytoryczny/statystyczny dr inż. Michał Nowicki – mechatronika prof. Mateusz Turkowski – metrologia prof. Cezary Zieliński – robotyka
Korekta
dr inż. Janusz Madejski
Skład i redakcja techniczna
Ewa Markowska
Druk
Drukarnia „PAPER & TINTA” Barbara Tokłowska Sp. K. Nakład 500 egz.
Wydawca
Sieć Badawcza Łukasiewicz –Przemysłowy Instytut Automatyki i Pomiarów PIAP Al. Jerozolimskie 202, 02-486 Warszawa
Pomiary Automatyka Robotyka jest czasopismem naukowo-technicznym obecnym na rynku od 1997 r. Przez 18 lat ukazywało się jako miesięcznik. Aktualnie wydawany kwartalnik zawiera artykuły recenzowane, prezentujące wyniki teoretyczne i praktyczne prowadzonych prac naukowo-badawczych w zakresie szeroko rozumianej automatyki, robotyki i metrologii. Kwartalnik naukowo-techniczny Pomiary Automatyka Robotyka jest indeksowany w bazach BAZTECH, Google Scholar oraz INDEX COPERNICUS (ICV 2022: 91,28), a także w bazie naukowych i branżowych polskich czasopism elektronicznych ARIANTA. Przyłączając się do realizacji idei Otwartej Nauki, udostępniamy bezpłatnie wszystkie artykuły naukowe publikowane w kwartalniku naukowo-technicznym Pomiary Automatyka Robotyka. Wersją pierwotną (referencyjną) jest wersja papierowa.
Punktacja Ministerstwa Edukacji i Nauki za publikacje naukowe w kwartalniku Pomiary Automatyka Robotyka wynosi obecnie 70 pkt. (wykaz czasopism naukowych i recenzowanych materiałów z konferencji międzynarodowych z dnia 5 stycznia 2024 r., poz. 29984). Przypisane dyscypliny naukowe – automatyka, elektronika, elektrotechnika i technologie kosmiczne.
Kwartalnik jest organem wydawniczym Polskiego Stowarzyszenia Pomiarów, Automatyki i Robotyki POLSPAR – organizacji prowadzącej działalność naukowo-techniczną w obszarze metrologii, automatyki, robotyki i pomiarów, reprezentującej Polskę w międzynarodowych organizacjach IFAC, IFR, IMEKO.
Rada Naukowa
prof. Jan Awrejcewicz
Katedra Automatyki, Biomechaniki i Mechatroniki, Politechnika Łódzka
prof. Milan Dado University of Žilina (Słowacja)
prof. Ignacy Dulęba Wydział Elektroniki, Fotoniki i Mikrosystemów, Politechnika Wrocławska
prof. Tadeusz Glinka Instytut Elektrotechniki i Informatyki, Politechnika Śląska
prof. Evangelos V. Hristoforou National Technical University of Athens (Grecja)
dr Oleg Ivlev University of Bremen (Niemcy)
prof. Larysa A. Koshevaja Narodowy Uniwersytet Lotnictwa, Kiev (Ukraina)
prof. Igor P. Kurytnik
Małopolska Uczelnia Państwowa im. rot. W. Pileckiego
prof. J. Tenreiro Machado Polytechnic Institute of Porto (Portugalia)
prof. Jacek Malec
Lund University (Szwecja)
prof. Andrzej Masłowski Sieć Badawcza Łukasiewicz –Przemysłowy Instytut Automatyki i Pomiarów PIAP, Warszawa
prof. Maciej Michałek
Wydział Automatyki, Robotyki i Elektrotechniki, Politechnika Poznańska
dr Vassilis C. Moulianitis University of Patras (Grecja)
prof. Joanicjusz Nazarko
Wydział Inżynierii Zarządzania, Politechnika Białostocka
prof. Serhiy Prokhorenko
„Lviv Polytechnic” National University (Ukraina)
prof. Eugeniusz Ratajczyk
Wydział Inżynierii i Zarządzania, Wyższa Szkoła Ekologii i Zarządzania w Warszawie
prof. Jerzy Sąsiadek Carleton University (Kanada)
prof. Rossi Setchi
Cardiff University (Wielka Brytania)
prof. Waldemar Skomudek
Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej, Akademia Górniczo-Hutnicza
dr Dragan Stokic
ATB – Institute for Applied Systems Technology Bremen GmbH (Niemcy)
prof. Eugeniusz Świtoński
Wydział Mechaniczny Technologiczny, Politechnika Śląska
prof. Peter Švec Slovak Academy of Sciences (Słowacja)
prof. Wojciech Włodarski
RMIT University, Melbourne (Australia)
prof. Eugenij T. Volodarsky
„Kyiv Polytechnic” National University (Ukraina)
Wydawanie kwartalnika Pomiary Automatyka Robotyka – zadanie finansowane w ramach umowy 907/P-DUN/2019 ze środków Ministra Nauki i Szkolnictwa Wyższego przeznaczonych na działalność upowszechniającą naukę.
Spis treści
3 Od Redakcji
5 Ewa Chodakowska, Andrzej Polecki
Cross-National Comparison of Technology Innovation Capabilities in Automation and Robotics
Porównanie krajów pod względem zdolności innowacyjnych w obszarze automatyki i robotyki
21 Piotr Bojarczak, Waldemar Nowakowski Automatyczna diagnostyka elementów toru kolejowego z użyciem sieci neuronowych głębokiego uczenia
Automatic Diagnosis of Railway Track Elements Using Deep Learning Neural Networks
31 Jacek G. Puchalski, Janusz D. Fidelus, Paweł Fotowicz
Analiza pełzania w przetwornikach momentu siły dla turbin wiatrowych Analysis of Creep in Torque Transducers for Wind Turbine
41 Marta Grzyb, Zbigniew Koruba
Comparative Analysis of the Guided Bomb Flight Control System for Different Initial Conditions
Analiza porównawcza systemu sterowania lotem bomby kierowanej dla różnych warunków początkowych
53 Jan Kierski, Hubert Graczyk
Modeling and Identification of Electromechanical Actuators for the ILR-33 AMBER Rocket
Modelowanie I identyfikacja siłowników elektromechanicznych do rakiety ILR-33 BURSZTYN
61 Błażej Torzyk, Bogusław Więcek
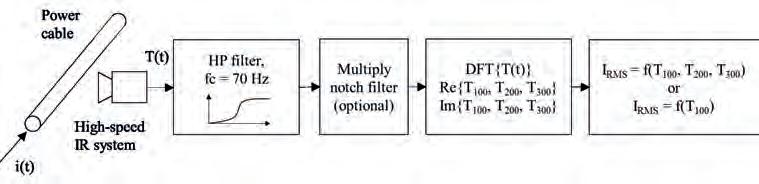
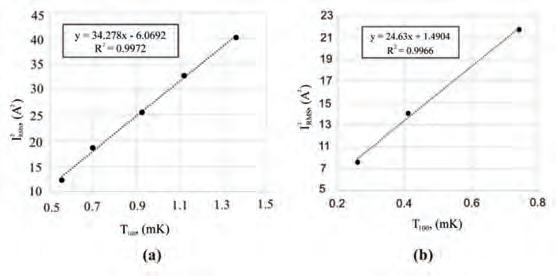
Evaluation of RMS Current in AC Power Wires Using a High-Speed Infrared System
Ewaluacja wartości skutecznej RMS prądu przemiennego w przewodach elektroenergetycznych z wykorzystaniem radiacyjnego pomiaru temperatury systemu IR
73 Marcin M. Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
Porównanie metod sterowania adaptacyjnego dla stołu balansującego kulą
A Comparison of Adaptive Control Methods for the Ball Balancing Table System
83 Dariusz Rzońca, Andrzej Bożek
Optymalizacja mieszanego odczytu zmiennych binarnych i rejestrowych w protokole
Modbus ze sterownika PLC implementującego CPDev
Optimization of Mixed Reading of Binary and Register Variables in Modbus Protocol
from PLC Implementing CPDev
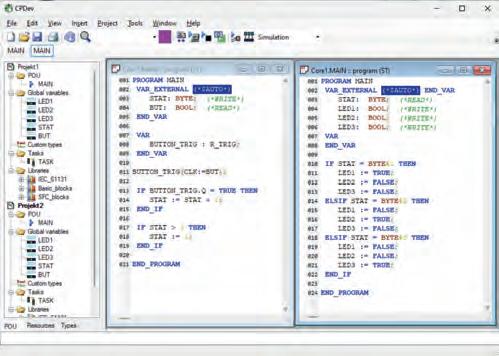
93 Marcin Hubacz, Jan Sadolewski, Bartosz Trybus
Model i implementacja dwurdzeniowego sterownika programowalnego opartego na maszynie wirtualnej
Model and Implementation of a Dual-Core Programmable Controller Based on a Virtual Machine
101 Paweł Nowak, Michał Nowicki, Piotr Gazda, Piotr Frydrych, Natalia Nowicka, Roman Szewczyk
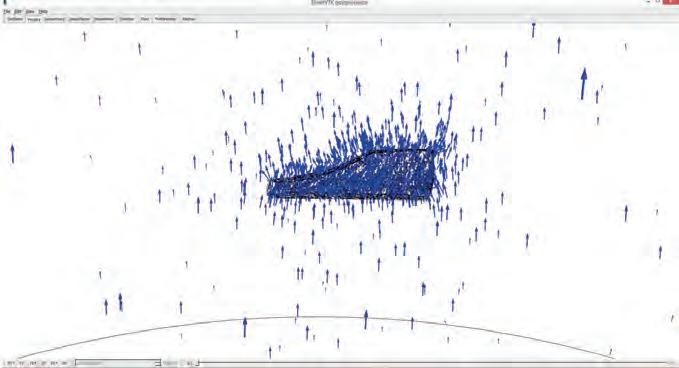
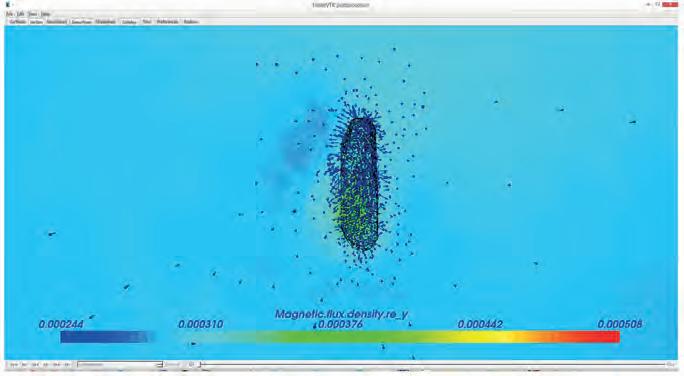
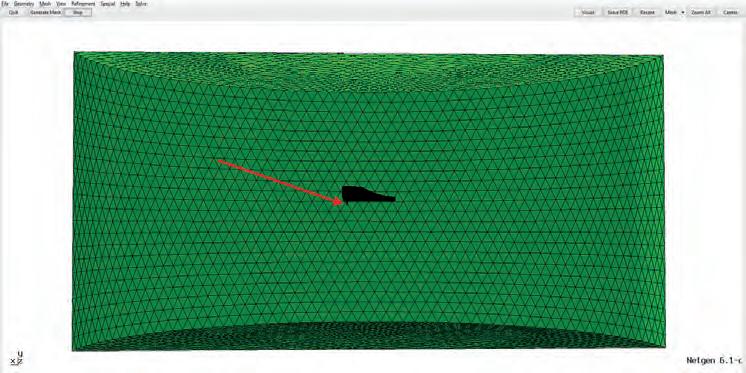
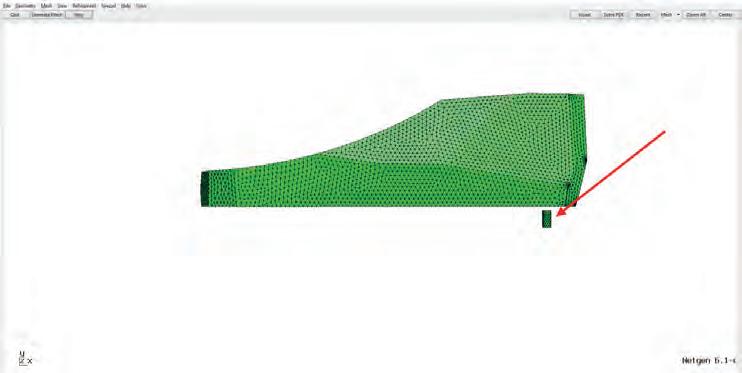
Zastosowanie Metody Elementów Skończonych do analizy metody określania rozmiaru buta na podstawie pomiarów pola magnetycznego
Utilization of Finite Element Method for Analysis of Shoe Size Assesssment Method Based on Magnetic Field Measurements
109 Tomasz Buratowski, Mariusz Giergiel, Piotr Wójcicki, Jerzy Garus, Rafał Kot
Safe and Reliable Movement of Fast LiDAR-based Self-driving Vehicle Bezpieczna i niezawodna jazda szybkiego pojazdu autonomicznego z użyciem
systemu LiDAR
117 Krzysztof Oprzędkiewicz
Numerical Analysis of the Discrete, Fractional Order PID Controller Using FOBD Approximation
Analiza numeryczna dyskretnego regulatora PID niecałkowitego rzędu na bazie aproksymacji FOBD
123 Mateusz Salach, Arkadiusz Stęchły, Andrzej Paszkiewicz, Patryk Organiściak, Grzegorz Budzik
Sterowanie kobotem za pomocą wirtualnej rzeczywistości dla potrzeb Przemysłu 4.0
Cobot Control Using Virtual Reality for the Needs of Industry 4.0
131 Mateusz Mścichowski, Krzysztof Sawicki, Tomasz Sosnowski, Krzysztof Firmanty, Mariusz Kastek, Jarosław Bareła
Metoda pomiaru parametrów kamer termowizyjnych za pomocą zautomatyzowanego stanowiska pomiarowego
Measurement of Thermal Camera’s Parameters’ Method Using an Automated Test Bench
139 Informacje dla Autorów
Drodzy Czytelnicy,
cieszy nas, że od wielu kwartałów coraz częściej autorzy wybierają nasze czasopismo, by zaprezentować najnowsze wyniki badań. Obecnie zamieszczamy czternaście artykułów, które uzyskały pozytywne opinie recenzentów.
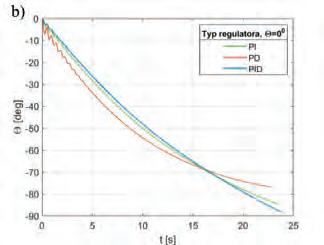
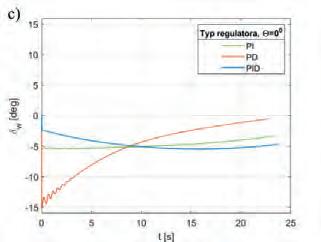
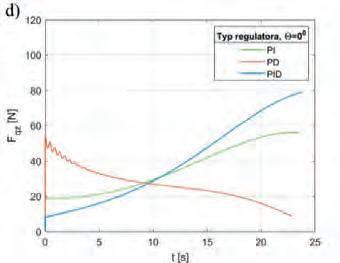
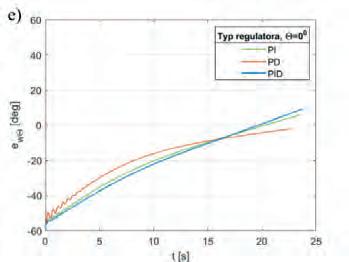
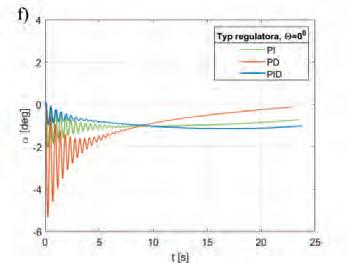
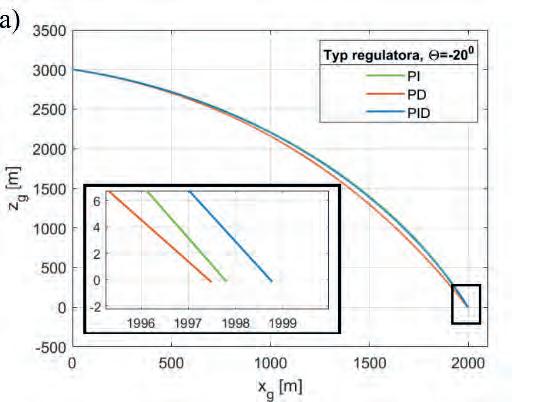
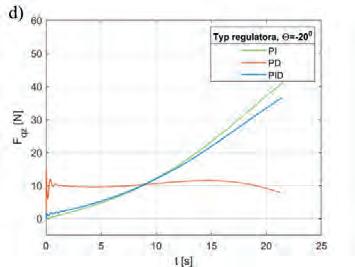
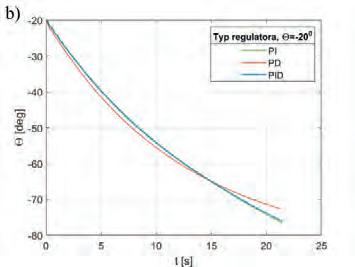
Prace dotyczące automatyki są bogato reprezentowane, od ich przedstawienia zacznę. Jedna z prac tej kategorii zajmuje się sterowaniem lotem bomby kierowanej w zależności od warunków początkowych. Przedstawia sposób doboru parametrów regulatorów PI, PD i PID. Kolejne artykuły opisują modelowanie i identyfikację parametrów elektromechanicznych siłowników stosowanych w rakietach suborbitalnych. Podejmują temat automatycznej oceny stanu technicznego elementów toru kolejowego za pomocą kamer linijkowych oraz sztucznych sieci neuronowych.
W następnych pracach autorzy porównują działanie dwóch algorytmów adaptacyjnego sterowania stołu balansującego kulą umieszczoną na jego powierzchni. Przedstawiają sposób odczytu ze sterownika PLC wymieszanych w protokole Modbus zmiennych, który powoduje skrócenie łącznego czasu cyklu komunikacyjnego.
W kolejnym artykule opisano model semantyczny oraz prototypową implementację dwurdzeniowego sterownika programowalnego równolegle przetwarzającego dwa programy wykonawcze za pośrednictwem maszyny wirtualnej, wykorzystującej wspólny obszar pamięci zmiennych globalnych. Następna praca przedstawia analizę numeryczną dyskretnych regulatorów PID ułamkowego rzędu, w których część ułamkowa aproksymowana jest za pomocą wstecznych różnic ułamkowego rzędu, w celu określenia optymalnej wielkości stosowanej pamięci.
Na pograniczu automatyki i robotyki znajduje się praca poświęcona porównaniu zdolności innowacyjnych wybranych krajów, mierzonych liczbą patentów w obszarze automatyki i robotyki. Ściśle do obszaru robotyki należy zaliczyć artykuł na temat zdalnego sterowania robotem współpracującym za pomocą wirtualnej rzeczywistości. W tej kategorii mieści się też artykuł opisujący realizację bezpiecznej jazdy szybkiego pojazdu autonomicznego wyposażonego w LiDAR.
Przedstawianie prac z zakresu pomiarów zacznę od artykułu, w którym wyznaczana jest wartość skuteczna prądu przemiennego, płynącego w przewodach wysokiej mocy, na podstawie promieniowania cieplnego. Uwzględniono tu nie tylko sinusoidalne przebiegi prądu. Kolejny artykuł zajmuje się użyciem Metody Elementów Skończonych do określenia rozmiaru buta na podstawie pomiarów zaburzenia jednorodnego pola magnetycznego przez sypki materiał o wysokiej przenikalności magnetycznej, umieszczony we wnętrzu buta i dostosowujący się do jego kształtu.
W następnym artykule przeanalizowano wpływ zjawiska pełzania momentu siły zarówno pod obciążeniem, jak i bez obciążenia turbin wiatrowych na ich efektywność. Ostatnia praca przedstawia zautomatyzowane stanowisko do pomiaru parametrów kamer termowizyjnych z możliwością dokonania pomiaru całkowicie automatycznego, półautomatycznego lub manualnego.
Mamy nadzieję, że artykuły opublikowane w tym numerze naszego kwartalnika wzbudzą Państwa ciekawość. Redakcja życzy interesującej lektury.
Redaktor naczelny kwartalnika Pomiary Automatyka Robotyka prof. dr hab. inż. Cezary Zieliński
Cross-National Comparison of Technology Innovation Capabilities in Automation and Robotics
Ewa Chodakowska, Andrzej Polecki
Faculty of Engineering Management, Bialystok University of Technology, Wiejska 45A, 15-351 Bialystok, Poland
Abstract: In today’s dynamic and global economic environment, technological innovations are a key determinant of international competitiveness. In the field of automation and robotics, the development of modern technologies is of particular significance, influencing not only industrial progress but also social aspects. Automation and robotics play a crucial role in the concept of modern industry, contributing to the creation of more sustainable, flexible, and human-centric production systems. The article aims to conduct an in-depth analysis of the patent activity in automation and robotics in Europe. Patent documentation serves as a source of knowledge about the directions of research, inventive activities, and consequently, the innovative and competitive potential of the economy. The number of patents over time reflects the dynamics of a country’s technological development. The article discusses the use of patent databases to evaluate a country’s innovation in automation and robotics. The conducted analysis of data on European countries enabled the identification of trends based on the International Patent Classification and specialisation from a geographical perspective using revealed comparative technological advantage. The European countries were classified using cluster analysis, demonstrating the diversity, and identifying leaders in each group.
Keywords: patents, innovations, future industry, robotisation, automatization, EU
1. Introduction
Measuring innovation is possible and necessary [65], and patents are the most important and frequently used statistical indicators of inventive activity and technological innovation [1-3, 66]. Patents represent intellectual property, which according to dictionary definitions is the idea, invention, or creation that can be protected by law from being copied [67]. World Intellectual Property Organization (WIPO) refers the intellectual property as creations of the mind, e.g. inventions, literary and artistic works, designs, symbols, names and images [68]. The creative works should be presented in a format that allows for dissemination and enables others to replicate, emulate, or produce them [69]. The original reason for patenting was to encourage innovation and promote economic growth by providing incentives for invention and commercialisation [4]. Obtaining intellectual property rights is an important issue for both academic and commercial entities, as well as entire countries as a predictor of economic performance [5, 66]. A region’s
Autor korespondujący:
Ewa Chodakowska, e.chodakowska@pb.edu.pl
Artykuł recenzowany nadesłany 21.06.2024 r., przyjęty do druku 19.08.2024 r.
ability to achieve high economic growth is closely linked to the use of new, innovative technologies [6].
The global patent system allows the submission of a patent to any national patent office to obtain protection in a selected country or the European Patent Office (EPO), which allows protection in European countries. Submitting patents to the World Intellectual Property Organization (WIPO) under the Patent Cooperation Treaty (PCT) is also possible. PCT, established in Washington in 1970, in 2024 provides applicants with the opportunity to secure patent rights in 157 states that are signatories to the Treaty [70]. Determining the patent class is an important element of the application procedure that helps organise and search for patent information. Main patent classification systems are International Patent Classification (IPC) and Cooperative Patent Classification (CPC). IPC and CPC are compatible, with CPC offering greater detail. The layout of complete classification consists of a section (designated by one of the capital letters), class (two-digit number), subclass (a capital letter), and group (either main groups or subgroups, consisting of two numbers separated by a stroke) [71]. The classification of patents in both systems facilitates the search, analysis, and management of patent information, thereby enhancing the ability to conduct comprehensive research.
In recent years, there has been a growing interest in mapping and studying development trends in various technologies utilising patent data, e.g., blockchain [4, 7], nanotechnology [8], pharmaceuticals [9], wind [10] or solar [11, 12] power technologies, hydrogen production [13], artificial intelligence (AI)/ machine learning [14], construction robotics [15], electronic design automation [16], Internet of Things [17]. Patent data-
base searches provide an understanding of the level of development of a wide range of innovative technologies and offer insights into their future direction to make innovation more effective. It is believed that systematic screening of the knowledge contained in patents is a key component of innovation and technology management and it contributes to identifying technical expertise in emerging technologies and allows the seizing of technological opportunities [18, 65]. It is an integral part of technology forecasting, development and adoption [19]. Patent analysis is an important source of anticipatory intelligence in various foresight studies conducted by policymakers and industry actors [20–22]. An example might be the increase in patent activity reflecting technological advances in generative artificial intelligence. The number of patents increased from 733 in 2014 to over 11 600 in 2022, when OpenAI’s ChatGPT demonstrated the capabilities of large language models to the public, and reached over 14 000 in 2023 [72].
The article aims to conduct an in-depth analysis of patent activity in automation and robotics. Advances in modern automation and robotics technologies are of great importance, affecting not only industrial progress but also contributing to human welfare [23] by improving the quality of life for individuals and entire nations [24]. Robotisation has the potential to increase regional consumption, investment, income, and public services [25]. Automation and robotics are integral to modern industry. The development of advanced automation and robotics technologies leads to decreased production costs, fewer failures, increased efficiency, and improved product quality to achieve competitive advantage. Accelerating the Industry 4.0 transformation is the most effective way to save resources in the long term and mitigate the linked economic and social risks [26]. Solutions from this family of technologies contribute to greener and human-centric production systems and significantly support compliance with sustainable development goals. In addition to its industrial applications, automation and robotics technologies serve to support people with disabilities, for instance, in physical rehabilitation [27]. At the same time, this area of technological development generates a wide array of societal concerns, uncertainties, and fears. Therefore, understanding the technological trajectories in automation and robotics is key to shaping responsible research and innovation in this field [28–30].
The general definition of automation in the context of engineering and industry is the process of using technology and systems to replace or assist humans in performing specific tasks or operations and can apply to both physical systems and software-based processes. Robotisation involves the use of robots to perform tasks, both physical and virtual. Automation and robotics include machines, devices, programmable controllers, sensors, and information technology systems. A study of the automation and robotics capabilities of different countries can provide valuable insights into the future of industrial production. Patent documentation is a reliable source of information on research directions, inventive activity, and the innovative and competitive potential of the economy. The number of patents granted overtime measures a country’s technological development. The key stakeholders in patent analysis are companies and investment funds, as well as universities and research institutes, who can use them to identify research gaps and fields for the commercialisation of research results. Monitoring advanced technology trends is also crucial for policymakers, allowing them to assess the competitive position, predict and actively shape future technological trends, and support appropriate research and development (R&D) decisions to develop sustainable growth strategies [16, 31−33].
The patent analysis methodology is generally consistent with the literature analysis. It involves defining the aims, selecting a patent database, developing a search strategy, conducting the search to collect data, and analysing, visualising, and interpret-
ing the data [73]. The third section of the article presents details of the methodology utilised in this work.
The article addresses the following questions:
1. What trends in automation and rob otics can be observed?
2. What is the patent activity in automation and robotics from a geographic perspective?
3. Can regional technological specialisations in automation and robotics be distinguished based on patent databases?
The first part of the article reviews and discusses the recent literature on patent analysis. It consists of (i) a discussion of cross-country comparisons of patent analysis and (ii) patent analysis in automation and robotics. Next, the methodology is described, and an attempt is made to answer the research questions using multidimensional comparative analyses. The core analysis is divided into four main sections: (i) a general discussion on the primary patent determinant, R&D expenditures, (ii) an assessment of patent activity growth, (iii) robotic and automation specialisation, and (iv) regional specialisation in program-controlled manipulators. In conclusion, the article discusses the theses that could be inferred from the patent statistics and identifies future research gaps.
2. Innovation performance and its measures – literature analysis perspectives
2.1. Cross-country comparisons on patent analysis
Innovation assessment and comparative analysis based on patent data are of interest to both researchers and practitioners including policymakers, industry leaders, and investors. By understanding the innovation landscape and benchmarking their performance against global and regional peers, organisations can identify strategic opportunities, take advantage of constraints, allocate resources effectively, and develop policies and strategies that foster innovation and competitiveness. This is reflected in publications including the Global Innovation Index (GII) by WIPO [74], the European Innovation Scoreboard (EIS) by the European Commission [75], World Intellectual Property Indicators 2023 by WIPO [76], OECD Science, Technology and Industry Scoreboard 2017 by OECD [77], as well as in proposals of original innovation indicators based on patent data, e.g. [1]. These works consider the total number of patents granted, by the field of main technologies and other data sources (e.g., R&D investment and grants, GDP, value of scientific literature) to determine the competitive position of countries. The GII 2023 includes 80 indicators categorised into institutions, human capital and research infrastructure, market and business sophistication. EIS 2023 distinguishes framework conditions, investments, innovation activities, and impacts, within them 12 innovation dimensions described by 32 indicators. The interest in comparative analyses is also reflected in the publication based entirely on patents, e.g., Patent Statistics and Country Profiles by WIPO [78] and in tools, e.g. EPO Worldwide Patent Statistical Database (EPO PATSTAT) [79] designed for conducting patent analyses and evaluation, PatentsView [80], which is a patent data analysis and visualisation platform of the U.S. Patent & Trademark Office (USPTO) or PatBase by Minesoft [81] − a searchable patent families database with visualisation and analytical engine.
A patent analysis perspective is used to assess the competence of countries in selected areas, e.g., comparing the differences in nanotechnology between the United States and China from 2001 to 2017 based on data from the USPTO and China National Intellectual Property Administration (CNIPA) [8]. The objects of comparison are not always the countries, but, for example,
urban areas based on the inventors’ addresses, as in collaboration networks in robotics analyses [34], NUTS 2 regions in a study on R&D indicators impact on innovation performance [35] or on the role of key enabling technologies in regional branching [36]. Bibliometric techniques in patent analysis make it possible to determine the position of a selected country with global trends in robotics patenting, e.g. [37].
In the context of patent-based country comparison, several studies examine barriers and incentives to innovation in patenting or use exogenous variables to adjust output when assessing a country’s innovation system. The relationship between GDP per capita, R&D expenditure, and patent applications is often considered since innovation contributes directly and indirectly to economic growth [38]. The estimated correlation between a country’s GDP per capita and its patent citations based on patents granted by the USPTO associated with 44 countries in the period 2006–2015 was 0.3 [5]. The positive impact of public R&D support and feed-in tariff schemes on wind power patent activity was revealed via an econometric model based on data from four Western European countries over the period 1977–2009 [10]. Other key drivers of the flow of new technologies are education and human capital, business climate and innovation policy, capital, and technological infrastructure [39]. Striving for long-term environmental sustainability and the need to change the economic model and decouple growth from resource consumption [40] have made environmental issues also a subject of interest in patent analyses. Environmental innovations represented by patents were exploited in the study of the impact of human activity on the environment and econometrically represented in the STIRPAT regression model. Based on data on Nordic economies during the period 2000–2019, it was proven that innovations mitigate the impact of oil and gas on the quality of the environment and reduce carbon dioxide emissions, especially in the long term [41].
R&D activities are undeniably linked to the creation of patents [42, 43] but also considering GDP and population when comparing patent intensity across regions can be a valuable approach to adjusting resident application activity [76].
2.2. Patent analysis in automation and robotics
Focused patent analysis is a common theme in the literature. Awareness of the importance of innovation causes patents and their citations to serve as the primary data source for identifying emerging technologies [18]. Areas of high research activity are reflected in the patent analysis as potential areas for investment and development. The growth in AI-based innovation observed in recent years makes it a topic of interest in multiple publications studying patents (both reports, e.g. [82] and scientific articles, e.g. [44]). A similar trend is visible in relation to graphite and its applications, e.g. [83] or nanotechnology, e.g. [45], blockchain, e.g. [7]. Another exploited area is related to environmental issues [46].
Despite the availability of information in patent records, the challenge of isolating the classes and identifying exactly which patent families cover the subject matter remains. In the case of automation and robotics, researchers note the ease of searching for patents only related to robotisation due to the specific and unambiguous nature of the term ‘robot’ [47]. However, particular inventions may also find applications other than those originally intended.
Among the articles predicting the future direction of robotics technology based on patent databases are those focusing on the development of care robotics in terms of publications, patent activity and networking [48]. The study covering the period until 2009 indicated Japan as the most active in terms of patent applications and publishing. Exploration of the swarm robotics cooperative control strategy based on patent analysis from 2003 to 2021, predicted two technical development directions for this
technology: swarm intelligence and self-organising collaborative strategy [49]. A data source of 228 service robotics patents was used to explore the potential of machine learning classification [50]. In terms of patent applications, the following significant players were revealed: China, the United States (US), South Korea, and India. Support vector machines based on patent data showed that China’s industrial robot sector had innovation gaps compared to the United States, Germany, South Korea and Japan, especially in terms of university-industry linkages, interdisciplinary competencies, and globalisation intentions [51]. Citation relationships among patents in the field of robotics were analysed to identify globally and locally important patents [52]. Analysis of the structured and unstructured data from the patent database showed the geographical distribution of construction robotics-related patents worldwide. According to the study, China led the ranking in terms of patent publications, followed by the US [15]. A patent study on collaborative robots identified the largest concentration of inventions in China, Japan and Germany [53]. Drawing the information from patents from 2002–2016, the geography of the “hot points” in robotics research, development, structures, and global network cooperation led to the conclusion that urban areas most specialised in robotics R&D are located in Germany, the US, Japan, and Sweden [34]. The analysis including, among others, robotics patent data until 2016 allowed to divide the European robotisation landscape into three groups according to robotics development [54]. The first group has the highest density in both robotics development and implementation (Sweden, Germany, Austria, Denmark and France), the second group is well situated only in some aspects (Spain, Italy, Belgium, the Netherlands and Finland), and the third group includes the lagging countries.
In the field of automation, the research frontier was determined in the electronic design automation technology field based on the IPC/CPC. Patent activity and quality were assessed to describe the competitive position of different countries. The main competitors identified are the United States, China, Japan, the United Kingdom, and Singapore [16]. According to the investigation of the United States Patent and Trademark Office data, the country that emerged as the leader in robotics and AI technologies is the US, followed by the European Union countries together, and Japan. However, Western countries are all losing to Asia. The outstanding performance of South Korea was noticed [47]. A review of the literature also revealed the works that concern selected specialised aspects of automation, e.g., patent analysis of epicyclic gear trains used in automatic transmissions [55], automatic connection devices [56], or integrated circuits [57].
Among recent works, no in-depth, up-to-date analysis comparing countries solely in terms of patents in the broad area of automation and robotics was found, including an assessment of the diversity of European countries.
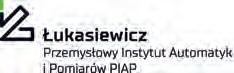
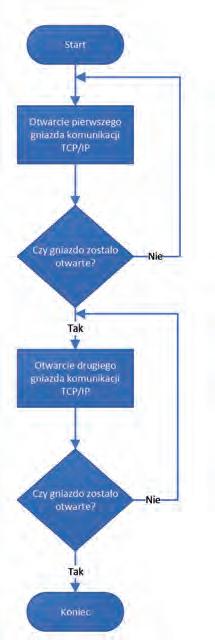
3. Research methodology
The research process is illustrated in Figure 1. Several databases facilitate access to patent information (Espacenet − provided by the European Patent Office, Google Patents − which allows searching for patents from various jurisdictions, PatentScope − maintained by the World Intellectual Property Organization, USPTO − the United States Patent and Trademark Office contains information on patents granted in the United States). At the initial stage of the analysis, above mentioned the most popular databases were analysed, lately, PatentScope was selected as containing international patent applications filled under the Patent Cooperation Treaty.
In the case of patent analysis, two search approaches can be applied: a term search/bag of words analysis or a traditional
Tabela
analiz według Międzynarodowej Klasyfikacji Patentowej/Wspólnej Klasyfikacji Patentowej
Subclass Main group
Descriptions
B25J manipulators; chambers provided with manipulation devices
B25J 9/00 programme-controlled manipulators
B25J 13/00 controls for manipulators
B25B tools or bench devices not otherwise provided for, for fastening, connecting, disengaging or holding
B25C tools or bench devices not otherwise provided for, for fastening, connecting, disengaging or holding
B60W
conjoint control of vehicle sub-units of different type or different function; control systems specially adapted for hybrid vehicles; road vehicle drive control systems for purposes not related to the control of a particular sub-unit
G05B control or regulating systems in general; functional elements of such systems; monitoring or testing arrangements for such systems or elements
G05D systems for controlling or regulating non-electric variables
patent classification. The IPC code search has proven to be stronger and more reliable than a matched keyword in associating a patent with a specific technology field [47]. The use of mixed patent searches is also a valid approach [72].
The approach was narrowed down, excluding patent classes only indirectly related to robotics, despite their utilisation within the field, e.g., G06F, covering electric digital data processing including calculations, computer systems and data processing methods or G06N, computing arrangements based on specific computational models. However, artificial intelligence and decision support systems are used in robots for decision-making, learning, adaptation to the environment and interaction with people. Table 1 includes the scope of the analyses according to the IPC.
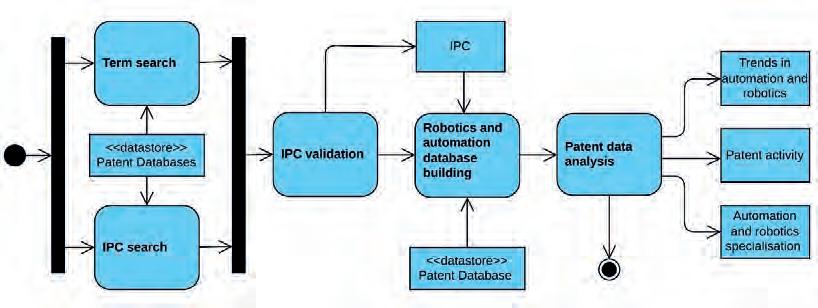
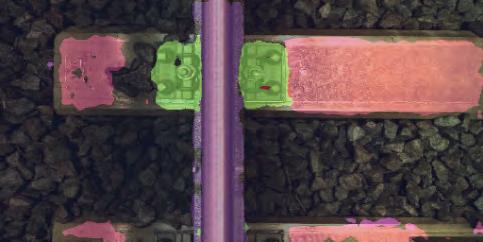
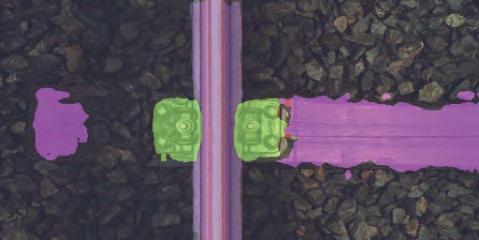
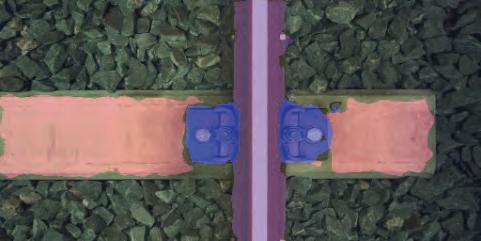
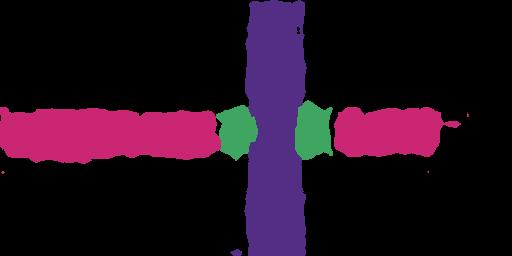
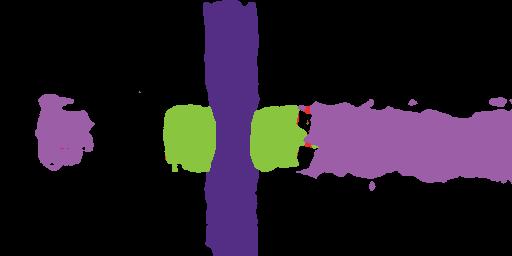
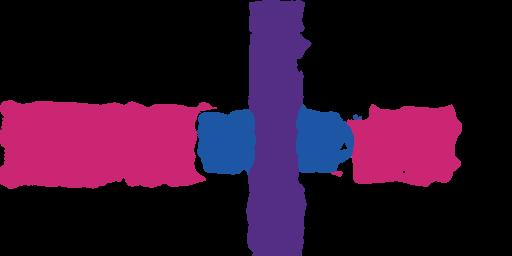
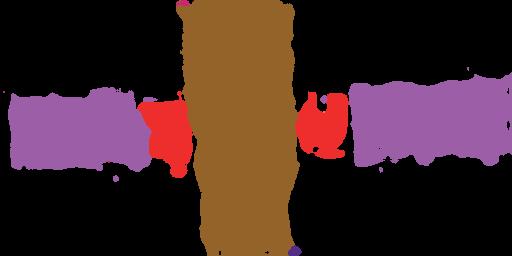
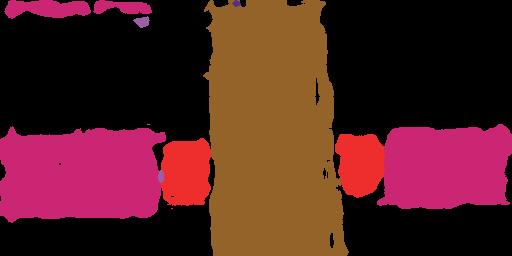
Figure 2 visually explores the assigned keywords of the selected patent classification codes with and without distinguishing the country of publication. The keywords indicate areas of intensive exploration and potential patent applications and verify the chosen classification’s correctness. The keywords mainly focus on control in the context of devices and systems. Noteworthy is the presence of numerous solutions dedicated to mobile devices, autonomous vehicles, and mobile robots, which indicates great interest in this area.
The period 2014–2023 was selected for analysis. In 2011, at the Hannover Messe (one of the world’s largest industrial trade fairs), the term “Industrie 4.0” appeared for the first time and at Hannover Messe 2014, the concept was developed, and progress in implementing the vision was presented. The official framework document for “Industrie 4.0” [84], the Plattform Industrie 4.0, and SmartFactory KL initiatives aimed to promote and coordinate the digital transformation of industry in Germany contributed to the spread of the idea of Industry 4.0 around the world. Many countries have begun to recognise the importance of integrating digital technologies into industry and adapt the concepts into their own industrial development strategies. The term “Industrie 4.0” gave rise to the global concept of “Industry 4.0”, as a general term describing the fourth industrial revolution [19]. Industry 4.0, its evolutions such as Industry 5.0, or generally future industry, refers to the intelligent networking of machines and processes for the industry based on cyber-physical systems [59], is a revolution in manufacturing control methodology [58]. Recent years have been a period of rapid digitisation and production automation. Applications of a combination of emerging new technologies are changing production, management, and work organisation methods and generating many new patentable innovations.
Fig. 1. Research framework
Rys. 1. Proces badawczy
Table 1. The scope of the analyses according to the International Patent Classification/Cooperative Patent Classification
1. Zakres
Fig. 2. Keywords analysis of selected subclasses: (a) patents without distinguishing the office of publication [PD=2014:2023 and IC=(B25J OR B25B OR B25C OR B60W OR G05B OR G05D) AND GRANT=(YES) AND ALIVE=(YES)”)]; (b) publication office: International Bureau of WIPO [PD=2014:2023 and CC=(WO) and IC=(B25J OR B25B OR B25C OR B60W OR G05B OR G05D) AND GRANT=(YES) AND ALIVE=(YES)] Rys. 2. Analiza słów kluczowych wybranych podklas: (a) patenty bez rozróżnienia urzędu publikacji; (b) patenty z miejscem publikacji: Światowa Organizacja Własności Intelektualnej
Determining the country of origin of a patent is quite a complex task. The registration of a patent in a specific country does not necessarily indicate the origin of the invention itself. According to PatBase [81], the top 10 jurisdictions are China, the United States, Japan, Germany, the International Bureau of WIPO, EPO, Korea, Canada, Taiwan and India. If one considers only WIPO, the top countries are the US, the International Bureau of WIPO, China, EPO, Germany, Japan, Korea, Canada, Australia, and India. Both the inventors’ and the applicant’s country may be relevant from different perspectives. Since the country of the applicant might reflect the location of the company’s headquarters, as well as state policy and patent procedures, the country of the inventors was considered as a more precise indicator of the origin of the idea and R&D activity that led to the inventions.
Of the two main patent evaluation methods (market-based which evaluates patents on commercial market value, patent-based which evaluates patents on their indicators) [57] the patent-based approach was applied.
The following formulas are useful for comparing countries’ technological positions and measuring international specialisation based on patents as indicators.
Compound annual growth rate [63]:
where: Pfirst, Plast the number of patent applications in the first and last year (in the analysis: at the end of 2014 and 2023 respectively), y the duration of the survey period (in the analysis: 9 years).
The interpretation of CAGR is as follows: CARG = 0.10 means that the value increased by an average of 10 % per year, and CAGR = 0 means that the value has not changed in the analysed period. CAGR does not reflect the variability of growth in individual years but shows a constant growth rate.
where: Pcti – the number of patents from country c in technology field i in a period t; cti i P ∑ – the number of patents from country c in a period t; cti c P ∑ – the number of patents in technology i worldwide in a period t; cti ci P ∑∑ – the number of patents granted worldwide in a period t
If RTA > 1, the country or region has a comparable technological advantage in the field, if RTA < 1, on the contrary, the country is less specialised in the field compared to the reference area.
Revealed symmetric technological advantage index (RSTA) with a range between −1 and +1, addresses the asymmetry in the RTA index making interpretation easier [59]:
The closer the value of RSTA to +1, the greater the revealed advantage, the closer the RSTA to −1, the lower.
Citations are commonly used measures of the economic and technological value of a patent, and therefore the quality of the region’s invention-based [15, 57]. The direct or indirect citation relationship among patents can be used to find the technological clusters and evaluate the importance of patents [52]. Citation databases are provided, among others, by PATSTAT, PatBase, and Google Patents.
Based on citation reports revealed comparative advantage weighted can be estimated (RTAw) [5]:
citation index; Ccti – the number of citations of patents from country c in technology field i in a period
In the conducted analysis two classes were examined: B25J 9/00 and B25J 13/00.
Around 270 000 under the PCT international applications were published in 2023. The list of the top five origins is consistently occupied by inventors from China, the US, Japan, South Korea, and Germany, accounting for 78 % of applications. China’s Huawei Technologies followed by Samsung Electronics from South Korea, Qualcomm from the US, Mitsubishi Electric of Japan, and BOE Technology Group of China remain the top fillers of PCT international applications in 2023 [85, 86]. This study examines the diversity of European countries in automation and robotics in terms of patents. The PCT publication data was selected as a key indicator of patent activity at the international level and a measure of interest in technology or innovation on the global stage (the term search in case of Poland DP:[2014–2023] AND IADC:PL). The analysis encompasses 30 countries: EU member states and additionally EEA countries (Norway, Iceland) and Switzerland.
4. Data analysis
4.1. Patents and R&D expenditures
Innovative outcomes are highly concentrated, and the leading countries in scientific, technological, and innovation capabilities are high-income nations, including the United States, France, Germany, Japan, and South Korea, as well as large economies such as China and India [87]. Although the analysis and modelling of the relationships between factors influencing the number of patents is beyond the scope of this publication, patent quantity examination could not omit the most important determinant, which is R&D expenditure. The analysed European countries are a relatively
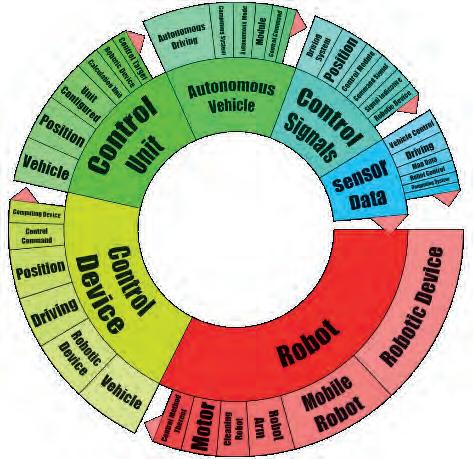
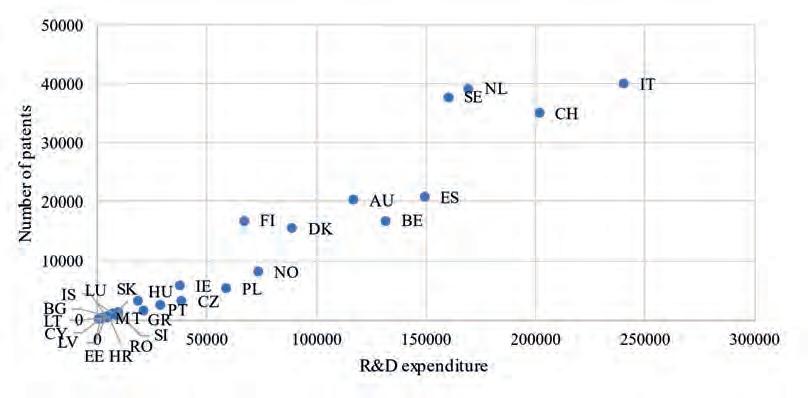
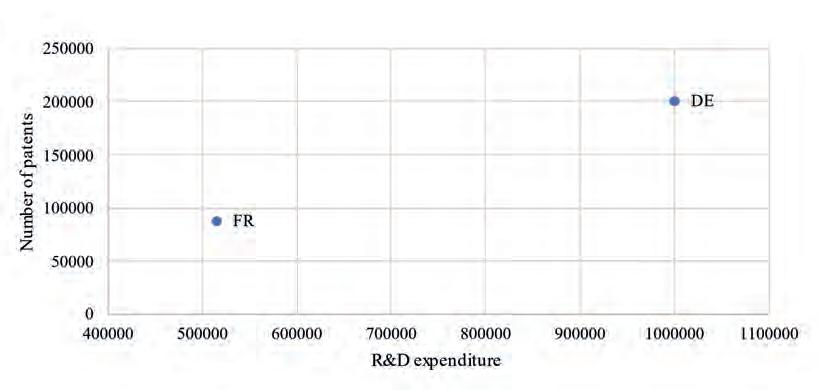
homogeneous group which are analysed together in many studies as having many common regulations and adopted coherent priorities. However, expressed as a percentage of GDP, R&D spending varies significantly, reaching values in the range between 0.46 % (Romania) and 3.43 % (Belgium), with an average of 1.82 % in 2022 [88]. Being aware that not all R&D investments are dedicated to development expressed directly in patented innovations, and non-patentable technologies contribute to the innovative capabilities, and not depreciating, e.g., basic research, in the case of the countries analysed, there is a very high correlation between R&D expenditure in million Euro and the number of patents. The correlation between lagged cumulative expenses in 2013–2022 and the cumulative number of all patents in 2014–2023 is 0.99, and without outliers such as Germany and France is 0.96 (Fig. 3).
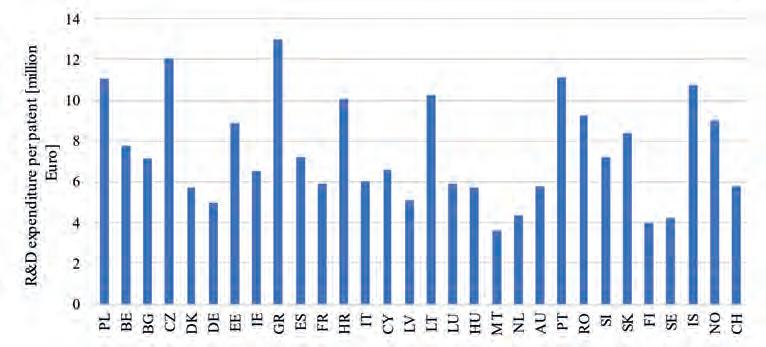
The relationship between the variables allows one to estimate the “cost of patent”. Figure 4 shows the million Euro of R&D expenditure per patent.
European leader countries listed in international rankings, e.g., Germany and France, have an under-average cost of obtaining a patent. Greece and Czechia have the highest R&D expenditure per patent. High costs are observed in Portugal, Poland, Iceland, Lithuania, and Croatia.
The patents selected for analysis represent only a fraction of the total number of patents. The percentage of automation and robotics patents in the total number of patents is, respectively, B25J − 0.65 %, B25B − 0.24 %, B25C − 0.03 %, B60W − 0.91 %, G05B − 1.31 %, and G05D − 0.68 %. However, the data presented illustrate the great importance of financial incentives in achieving innovation capability.
Fig. 3. Correlation between the number of patents and R&D expenditure (aggregated data) [88] Rys. 3. Zależność liczby patentów i wydatków na badania i rozwój (dane zagregowane) [88]
(a)
(b)
4.2. Patent activity growth
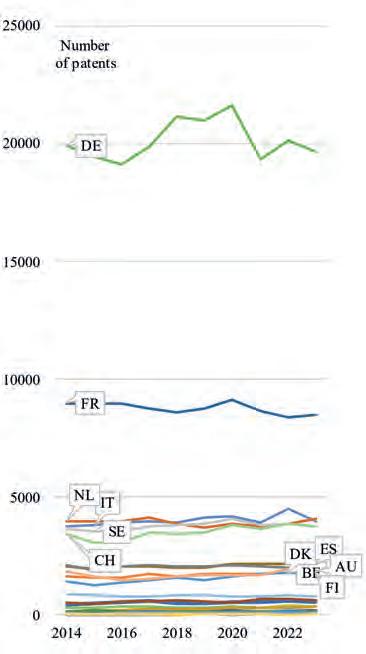
The number of patents, including those related to robotics, fluctuates with slow growth year by year. Considering the absolute number of patents, European countries may be divided into four groups with regard to their patent activity (Fig. 5a):
The outstanding including Germany (DE), which belongs to the top five countries in the world in terms of the number of patents, with circa 20 000 patents in the period 2014 2023, and France (FR, with more than 8 500 patents, which ranks just outside the top ten.
Top performers Netherlands (NL), Italy (IT), Sweden (SE), and Switzerland (CH) with numbers of patents exceeding 3 500.
Average performers Spain (ES), Australia (AU), Finland (FI), Denmark (DK), and Belgium (BE) with more than 1 500 patents.
Underperformers Norway (NO), Ireland (IE), Poland (PL), Czechia (CZ), Hungary (HU), Portugal (PT), Greece (GR), Slovenia (SI), Luxembourg (LU), Slovakia (SK), Romania (RO), Bulgaria (BG), Lithuania (LT), Croatia (HR), Latvia (LV), Iceland (IS), Estonia (EE), Malta (MT), Cyprus (CY) with less than 1 000 patents.
Fig. 4. R&D expenditure per number of patents [88]
Rys. 4. Wydatki na badania i rozwój na liczbę patentów [88]
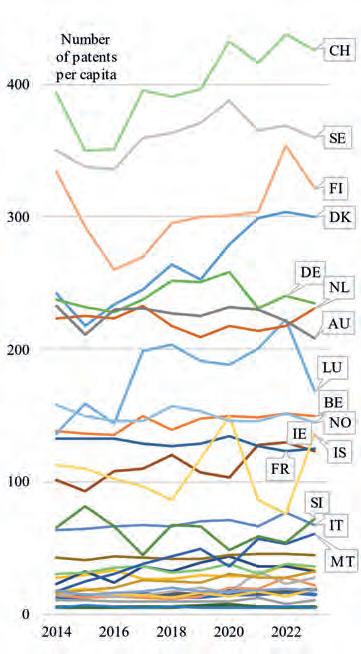
Since the correlation co efficient between population and the number of patents in the analysed period is 0.8, the differences between countries in the number of patents per 1 million p eople are illustrated (Fig. 5b). In this case, there are no clearly distinguishable groups. The following division can be proposed:
Top performers with more than 200 patents per 1 million inhabitants: Switzerland (CH), Sweden (SE), Finland (FI), Denmark (DK), Germany (DE), Netherlands (NL), Austria (AU).
Average performers with more than 50 patents per 1 million inhabitants: Luxembourg (LU), Belgium (BE), Norway (NO), Iceland (IS), France (FR), Ireland (IE), Slovenia (SI), Italy (IT), Malta (MT).
Underperformers with less than 50 patents per 1 million inhabitants: Spain (ES), Hungary (HU), Czechia (CZ), Portugal (PT), Estonia (EE), Latvia (LV), Cyprus (CY), Lithuania (LT), Slovakia (SK), Greece (GR), Poland (PL), Bulgaria (BG), Croatia (HR), Romania (RO).
The number of patents, including those related to robotics, is fluctuating with slow growth year by year. The CAGR for all
Fig. 5. The number of patents including those related to robotics and automation between 2014 and 2023: (a) absolute value; (b) per 1 million inhabitants Rys. 5. Liczba patentów, w tym związanych z robotyką i automatyką w latach 2014−2023: (a) wartość bezwzględna; (b) na 1 mln mieszkańców
Table 2. The compound annual growth rate (2014−2023)
Tabela 2. Średnia roczna stopa wzrostu (2014−2023)
PCT patents is 0.071, and for patents originating from Europe, it is 0.053. In the case of robotics and automatisation worldwide, higher average growth is observed in the case of B25J (0.164), G05D (0.146), B60W (0.116), and G05D (0.115). Table 2 displays the CAGR for European countries in the analysed patent subclasses from 2014 to 2023. CAGR was not calculated for patent subclasses where no patents were filed before 2014. Regarding CAGR over 0.3, Romania stands out in G05D, G05B, and B60W, while Poland and Ireland in B60W.
Estonia has achieved a high result in B25J that is only slightly lower than 0.3. These are the countries that started to be active in the patent subclasses studied during the analysed period. The European countries at the top of the world patent rankings, Germany and France, have not seen a sharp increase in the number of patents. In their case, a stabilisation is observed.
Table 3. Revealed technological advantage
Tabela 3. Ujawniona przewaga technologiczna
4.3. Robotic and automation specialisation
The RTA was used to divide European countries into several groups considering the six patent subclasses (Table 3). Many countries do not have any patents in B25C, which is also true, but to a lesser extent, for B25B.
The leaders in each group analysed are as follows:
− B25J Iceland (IS) and Estonia (EE) (with a relatively small number of patents in total);
− B25B Austria (AU) and Sweden (SE);
− B25C Switzerland (CH);
− B60W Romania (RO) and Sweden (SE);
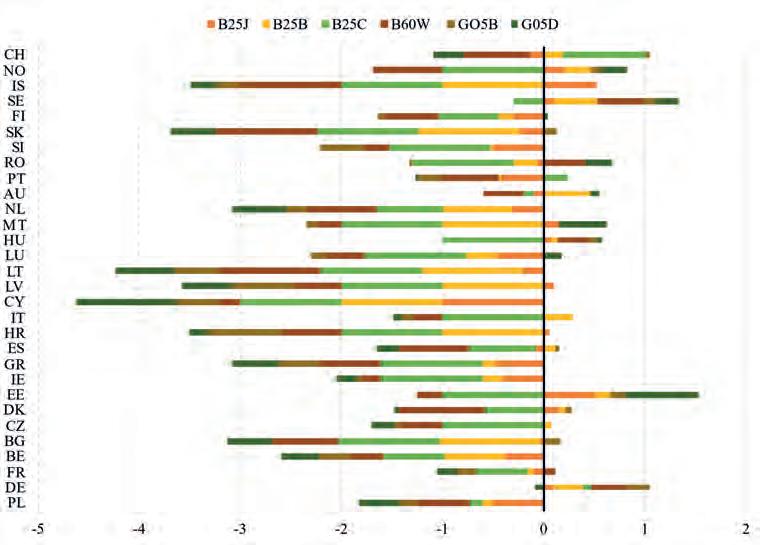
The two countries that stand out the most are Switzerland and Estonia in terms of the RTA in classes B25C and G05D, respectively. Additionally, Iceland is the leader in B25J with zero patents in other classes. No country has a zero number in G05B. Analysing all subclasses together, Switzerland and Estonia emerge as strong players among European countries, although Sweden and Germany also perform well. This is confirmed by RSTA presented in summary in Figure 6. When
Fig. 6. Revealed symmetric technological advantage index (RSTA)
Fig. 7. The results of agglomerative cluster analysis
Rys. 7. Wyniki aglomeracyjnej analizy skupień
Fig. 8. Cluster Mean Plot
Rys. 8. Wykres średnich w klastrach
comparing European countries, Sweden and Germany stand out as having the greatest advantage in most of the patent classes. Estonia, Switzerland, and Austria show a balance in their achievements. Hungary, Romania, and Norway also stand out positively in the overall analysis.
Additionally, a cluster analysis was performed to determine whether it is possible to separate groups. Figure 7 presents the results of exploration clustering using the agglomeration method for standardised data.
European countries can be divided into six groups based on Ward methods to give the smallest within-group variance and Euclidean distance. A connecting distance greater than six was assumed:
two clusters with individual entities: Switzerland (CH), and Estonia (EE) Latvia (LV), Croatia (HR), Cyprus (CY), Lithuania (LT), Netherlands (NL), Belgium (BE), Finland (FI), Luxembourg (LU), Ireland (IE), France (FR), Slovenia (SI), Greece (GR), Portugal (PT), Poland (PL); Austria (AU), Norway (NO), Italy (IT), Denmark (DK), Spain (ES), Czechia (CZ); Iceland (IS), Malta (MT), Slovakia (SK), Bulgaria (BG); Romania (RO), Hungary (HU), Sweden (SE), Germany (DE).
K-means clustering into six groups designated in the hierarchical approach (assuming preliminary cluster centres to maxi-
mise distances) distinguishes, in addition to clusters with only Switzerland (CH), and Estonia (EE), a separate group for Iceland (IS), and the remaining groups are: Germany (DE), Hungary (HU), Romania (RO), Sweden (SE) countries with averages exceeding the mean values; Bulgaria (BG), Czechia (CZ), Denmark (DK), Spain (ES), Italy (IT), Malta (MT), Austria (AU), Slovakia (SK), Finland (FI), Norway (NO) countries with average mean values; Poland (PL), France (FR), Belgium (BE), Ireland (IE), Greece (GR), Croatia (HR), Cyprus (CY), Latvia (LV), Lithuania (LT), Luxembourg (LU), Netherlands (NL), Portugal (PT), Slovenia (SI) countries with lower mean values of the analysed variables.
Plots of cluster average values are shown in Figure 8. As demonstrated above, EU countries cannot be considered homogeneous in terms of patents in analysed subclasses. According to RTA, it cannot be concluded that the clusters coincide with the traditional division into Eastern and Western Europe, Scandinavian, and Southern countries.
4.4. Regional specialisation in programme-controlled manipulators
Forward citation can be interpreted as an indicator of the impact or importance of a given patent in the context of further technological development. Table 4 includes the total number of granted patents published in 2014 2023 registered in WIPO indexed in PatBase. On average, patents receive 12 citations but subclasses G05B, G05D, and main group
Ewa Chodakowska, Andrzej Polecki
B25J 13/00 positively stand out with an average citation count of about 15.
B25J 9, in the context of modern industry, relates to the latest trends and innovations in the field of program-con -
Table 4. The number of patents and their forward citations Tabela 4. Liczba patentów i ich cytowań po publikacji
SubclassNumber of patentsNumber of citations
13 4 001
B25J OR B25B OR B25C OR B60W OR G05B OR G05D
Source: PatBase [PD=2014:2023 and CC=(WO) and IC=(B25J13) AND GRANT=(YES)]
*Green fill indicates the achievement of comparative advantage (RTA > 1 or RTAw > 1)
trolled manipulators, which is of key importance for the competitiveness and development of various economic sectors. The general class B25J pertains to manipulators in general. It may include manually operated, mechanically controlled manipulators, as well as those operated through various control systems, including programmatically controlled systems. The patents in subclass B25J 9 focus on software-controlled manipulators, which is a key area of innovation in robotics. Studying these patents can help to monitor the latest developments in robot control and industrial process automation.
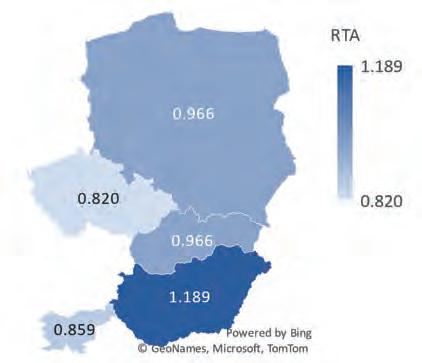
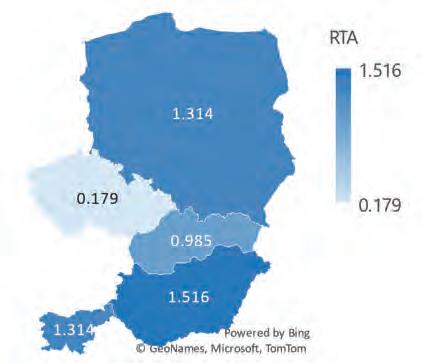
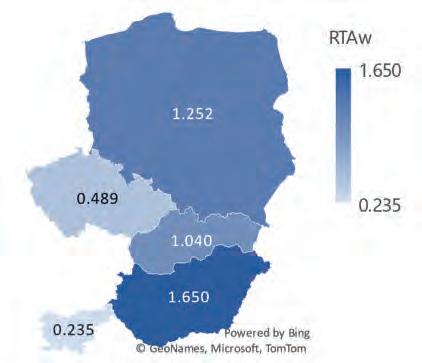
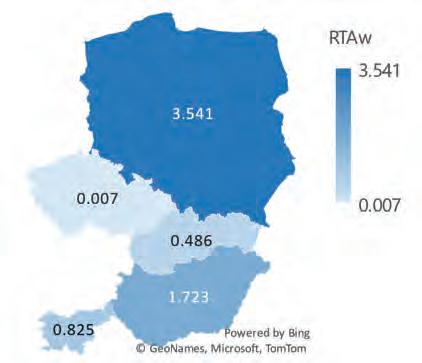
To examine the disparities in patent activity, the Central European states (as defined by the OECD) based on the main group B25J 9/00 (programme-controlled manipulators) within the subclass BJ25 (manipulators; chambers provided with manipulation devices) were compared. The WIPO database [85] and citations disclosed in Google Patents [89] were utilised. Revealed technological advantage (RTA > 1) indicated only Hungary (RTA = 1.189) as competitive. The weighted RTA, considering the number of patents and the number of citations apart from Hungary (1.650), also distinguishes Poland (1.252) and Slovakia (1.040) and lowers the position of Czechia and Slovenia (Figure 9a and Figure 9b).
Similarly, the main group B25J 13 was analysed, which allowed Hungary, Slovenia, and Poland to be distinguished in the context of RTAw. Poland leads with a score of 3.542 in RTAw, followed by Hungary with a score of 1.723 (Figure 9c and Figure 9d). In the case of Poland, the number of citations radically changed the results.
To illustrate the influence of incorporating citations on the ranking of the five analysed countries, Table 5 displays the positions and identifies the countries that have gained a comparative advantage.
The change in ranking positions is not radical; this is a shift up/down by one position, but the country’s classification as having a cooperative advantage has changed. Therefore, citations may influence the perception of inventions’ technological and economic value.
5. Discussion
Patent statistics are an important source of information about the current level of economic development. However, a one-dimensional analysis of patents is not justified. Qualifying patents for a selected thematic area is a big challenge because, in many cases, the limits of their future application cannot be predicted with certainty. The work analysed patents in the following subclasses B25J (B25J 9, B25J 13), B25B, B25C, B60W, G05B, G05D.
Despite the significant progress observed in the industry and the gradual implementation of the Industry 4.0 concept, no significant increase in the number of patented inventions in automation and robotics has been observed. The interpolation of this result is consistent with the forecasts formulated in the report Top 100 Global Innovators 2024 [90]. It is predicted to increase and improve in government and academic research, software, media, fintech, mining and metals, telecommunications and stabilisation in semiconductors, electronics and computing equipment, industrial systems, energy and electrical segments. CAGR is over 0.3 only in the case of Poland and Ireland in B60W, Romania in G05B and G05D. These are the countries that are new players in the innovation market with a small absolute number of patents. The inability to calculate CARG for many countries could be seen as positive, since the first patents just appeared in the analysed period, proving the sector’s development.
European countries are diverse in terms of patent activity and specialisation. When analysed together, they perform best in the G05D subclass with an average RTA above 1.02, but also in the B25J subclass with a result of 0.95. The smallest variation is in G05B. Individually, Switzerland should be singled out in subclass B25C, Estonia and Iceland in B25J, Austria and Sweden in B25B, Romania and Sweden in B60W, Germany in G05B, and Iceland in G05D. Based on the clustering method, three groups of countries can be identified after excluding outliers with excellent RTA results in single subclasses (Switzerland B25C, Estonia − G05D and B25J, and Iceland B25J). Germany, Hungary, Romania, and Sweden perform best, achieving above-average results from the perspective of a selected set of subclasses.
The revealed comparative advantage weighted proved that considering not only the number of published patents but also citations may change a country’s position. Poland ranks 27th in terms of the number of total patents per million inhabitants among the 30 European countries (it occupied last place among Central European countries) and does not stand out among European countries in terms of RTA in subclasses. However, in the case of selected main groups and when considering the number of citations, it has a distinctive RTAw score of B25J 13 and a significant B25J 9 among Central European countries.
6. Conclusion
The relationship between research and development achievements, production technology and competitiveness has been a subject of scientific interest for years. It is widely acknowledged that a means to facilitate economic development invo-
Table 5. Country ranking based on RTA and RTAw Tabela 5. Ranking krajów na podstawie RTA i RTAw
lves leveraging and adapting existing innovation capabilities [86]. Patents do not reflect all of the research and innovative efforts behind an invention [66]. Some technological development activities do not result in patentable inventions, and not all inventors apply for patent protection [65]. However, patents as codified knowledge, are an essential component of the innovation process, linked to the invention, and measure the direct output and productivity of the scientific system. Patent analysis allows the extrapolation of upcoming trends. Along with the review of scientific publications, Delphi analysis, scenario analysis, or agent-based simulation, it is successfully used in technology foresight and forecasting.
The industry has benefited greatly from automation and robotics. The differences observed in this comparative study suggest that there is potential to stimulate research activity and innovation in many countries and to build human capital capable of creative problem-solving to support organisations introducing innovations. There is room for improvement of the practices and procedures, including those at universities, to increase the awareness of the academic and managerial staff.
Another problem is the insufficient commercialisation [87]. R&D efforts that lead to innovations that translate into patents must prove successful in markets [42] and many patents are never implemented. This leads to attempts to estimate the likelihood of commercialisation [60]. Incentives and disincentives for patent commercialisation remain an interesting research topic.
Future research directions might include the following:
1. It is worth assessing the coherence of technological research development in the field of automation and robotics with the level of maturity of the implementation of the Industry 4.0 concept. Future studies might investigate the diffusion of invented robotics technologies and their dissemination and adaptation in the form of solutions or applications. They could also assess the maturity of the innovation system by examining the scope of cross-sectoral cooperation in the field of robotics.
2. Published results prove that AI techniques can be utilised effectively and efficiently in applications covering digital indicators [61]. Although attempts to use text mining tools have already been made in various patent analyses [57, 62–64]. Further research should explore more in-depth the extent to which patent documents can serve as a data source for machine learning applications in automation and robotics, including advanced natural language processing systems.
3. The study of factors influencing the number of granted patents focused on automation and robotics, their citation frequency and commercialisation remains a rich and unexploited field with significant research and analytical potential.
4. Future research based on patent analysis could aim to offer a comprehensive analysis of individual automation and robotics technologies and their relevance and significance to different industrial sectors.
The robotics and automation market has grown significantly in recent years and is expected to continue to grow in the future. In addition, the share of technology-oriented research is increasing. The global landscape is therefore expected to change dynamically, both in terms of geographical distribution and thematic focus. The emergence of new technologies could have a significant impact on various industries, and the analysis could proactively anticipate and address any potential implications. This requires ongoing monitoring of the geographical dynamics of innovation capabilities in automation and robotics.
Bibliography
1. Ponta L., Puliga G., Manzini R., A measure of innovation performance: the Innovation Patent Index, “Management Decision”, Vol. 59, No. 13, 2021, 73 98, DOI: 10.1108/MD-05-2020-0545.
2. Gazni A., The growing number of patent citations to scientific Papers: Changes in the world, nations, and fields, “Technology in Society”, Vol. 62, 2020, DOI: 10.1016/j.techsoc.2020.101276.
3. Nazarko J. (red.), Podlaska strategia rozwoju nanotechnologii do 2020 roku. Przełomowa wizja regionu, Oficyna Wydawnicza Politechniki Białostockiej, Białystok 2013, [https://pbc.biaman.pl/dlibra/publication/31469/edition/30265/content].
4. Dehghani M., Mashatan A., Kennedy R.W., Innovation within networks – patent strategies for blockchain technology, “Journal of Business & Industrial Marketing”, Vol. 36, No. 12, 2021, 2113 2125, DOI: 10.1108/JBIM-05-2019-0236.
5. Mora-Apablaza L., Navarrete C., Patents as indicators of the technological position of countries on a global level?, “Scientometrics”, Vol. 127, No. 3, 2022, 1233–1246, DOI: 10.1007/s11192-022-04268-y.
6. Nazarko J., Kształtowanie polityki proinnowacyjnej regionu np. foresightu technologicznego <<NT FOR Podlaskie 2020>>, „Optimum. Studia Ekonomiczne”, Vol. 2, No. 50, 2011, 241 251.
7. Clarke N.S., Jürgens B., Herrero-Solana V., Blockchain patent landscaping: An expert based methodology and search query, “World Patent Information”, Vol. 61, 2020, DOI: 10.1016/j.wpi.2020.101964.
8. Wu L., Zhu H., Chen H., Roco M.C., Comparing nanotechnology landscapes in the US and China: a patent analysis perspective, “Journal of Nanoparticle Research”, Vol. 21, No. 8, 2019, DOI: 10.1007/s11051-019-4608-0.
9. Gadiya Y., Gribbon P., Hofmann-Apitius M., Zaliani A., Pharmaceutical patent landscaping: A novel approach to understand patents from the drug discovery perspective, “Artificial Intelligence in the Life Sciences”, Vol. 3, 2023, DOI: 10.1016/j.ailsci.2023.100069.
10. Lindman Å, Sö derholm P., Wind energy and green economy in Europe: Measuring policy-induced innovation using patent data, “Applied Energy”, Vol. 179, 2016, 1351 1359, DOI: 10.1016/j.apenergy.2015.10.128.
11. De Paulo A.F., Graeff C.F.D.O., Porto G.S., Uncovering emerging photovoltaic technologies based on patent analysis, “World Patent Information”, Vol. 73, 2023, DOI: 10.1016/j.wpi.2023.102181.
12. Hu F., Mou S., Wei S., Qiu L., Hu H., Zhou H., Research on the evolution of China’s photovoltaic technology innovation network from the perspective of patents, “Energy Strategy Reviews”, Vol. 51, 2024, DOI: 10.1016/j.esr.2024.101309.
13. Arsad S.R., Ker P.J., Hannan M.A., Tang S.G.H., et al., Patent landscape review of hydrogen production methods: Assessing technological updates and innovations, “International Journal of Hydrogen Energy”, Vol. 50, 2024, 447 472, DOI: 10.1016/j.ijhydene.2023.09.085.
14. Iqbal Z., Sadaf S., Artificial Intelligence/Machine Learning-based Innovations – A Review of Patent Eligibility Standards, Policies, Open Issues and Guiding Framework, “Expert Systems with Applications”, Vol. 239, 2024, DOI: 10.1016/j.eswa.2023.121819.
15. Liu Y., Alias A.H.B., Haron N.A., Bakar N.A., Wang H., Technology status tracing and trends in construction robotics: A patent analysis, “World Patent Information”, Vol. 76, 2024, DOI: 10.1016/j.wpi.2023.102259.
Ewa Chodakowska, Andrzej Polecki
16. Wang X., Daim T., Huang L., Li R., Shaikh R., Kassi D.F., Monitoring the development trend and competition status of high technologies using patent analysis and bibliographic coupling: The case of electronic design automation technology, “Technology in Society”, Vol. 71, 2022, DOI: 10.1016/j.techsoc.2022.102076.
17. Ardito L., D’Adda D., Petruzzelli A.M., Mapping innovation dynamics in the Internet of Things domain: Evidence from patent analysis, “Technological Forecasting and Social Change”, Vol. 136, 2018, 317 330, DOI: 10.1016/j.techfore.2017.04.022.
18. Jiang M., Yang S., Gao Q., Multidimensional indicators to identify emerging technologies: Perspective of technological knowledge flow, “Journal of Informetrics”, Vol. 18, No. 1, 2024, DOI: 10.1016/j.joi.2023.101483.
19. Gładysz B., Corti D., Montini E., Forecasting the Development of RFID Technology, “Management and Production Engineering Review”, 2021, 38 47, DOI: 10.24425/MPER.2021.136870.
20. Nazarko Ł., Istota foresightu i jego percepcja w Polsce, „Optimum. Studia Ekonomiczne”, No. 4, 2011, 224 233.
21. Ejdys J., Nazarko Ł., Foresight gospodarczy – instrumentem orientacji na przyszłość, „Prace Naukowe Uniwersytetu Ekonomicznego we Wrocławiu”, No. 340, 2014, 651 664, 10.15611/pn.2014.340.58.
22. Glińska U., Kononiuk A., Nazarko Ł., Przegląd projektów foresightu branżowego w Polsce, „Nauka i Szkolnictwo Wyższe”, Vol. 2, 2008, 60 73.
24. Mytareva L.A., Gorshkova N.V., Shkarupa E.A., Yalmaev R.A., The Cyber Economy and Digitization: Impacts on the Quality of Life. [In:] Filippov V.M., Chursin A.A., Ragulina J.V., Popkova E.G. (eds), The Cyber Economy. Contributions to Economics. 2019, Springer, Cham. DOI: 10.1007/978-3-030-31566-5_3.
25. Gao Z., Shadow of Technology: Robotics Development and Regional Economic Inequality, “Journal of Knowledge Economy”, 2024, DOI: 10.1007/s13132-024-01856-6.
26. Pollak A., Hilarowicz A., Walczak M., Gąsiorek D., A Framework of Action for Implementation of Industry 4.0. an Empirically Based Research, “Sustainability”, Vol. 12, No. 14, 2020, DOI: 10.3390/su12145789.
27. Klimasara W., Pilat Z., Urządzenie do wspomagania rehabilitacji ruchowej, Patent 212834.
28. Nazarko Ł., Responsible Research and Innovation in Enterprises: Benefits, Barriers and the Problem of Assessment, “Journal of Open Innovation: Technology, Market, and Complexity”, Vol. 6, No. 1, 2020, DOI: 10.3390/joitmc6010012.
29. Nazarko Ł., Melnikas B., Operationalising Responsible Research and Innovation – tools for enterprises, “Engineering Management in Production and Services”, Vol. 11, No. 3, 2019, 21–28, DOI: 10.2478/emj-2019-0017.
30. Nazarko Ł., Responsible Research and Innovation in Industry: From Ethical Acceptability to Social Desirability, [In:] “Corporate Social Responsibility in the Manufacturing and Services Sectors”, Golińska-Dawson P., Spychała M. (eds.), 2019, 127-138, DOI: 10.1007/978-3-642-33851-9_7.
31. Marino A., Pariso P., Comparing European countries’ performances in the transition towards the Circular Economy, “Science of The Total Environment”, Vol. 729, 2020, DOI: 10.1016/j.scitotenv.2020.138142.
32. Nazarko J., Glińska E., Glińska U., Ejdys J., Kierunki rozwoju nanotechnologii w województwie podlaskim. Mapy.
Marszruty. Trendy, Oficyna Wydawnicza Politechniki Białostockiej, Białystok 2013, [https://pbc.biaman.pl/dlibra/publication/27112/edition/25904/content].
33. Cho dakowska E., Nazarko J., Hybrid Rough Set and Data Envelopment Analysis Approach to Technology Prioritisation, “Technological and Economic Development of Economy”, Vol. 26, Np. 4, 2020, 885–908, DOI: 10.3846/tede.2020.12538.
34. Scherngell T., Schwegmann K., Zahradnik G., The geographical dynamics of global R&D collaboration networks in robotics: Evidence from co-patenting activities across urban areas worldwide, “PLoS ONE”, Vol. 18, No. 4, 2023, DOI: 10.1371/journal.pone.0281353.
35. Halásková M., Bednář P., Effect of public and private sector R&D indicators on innovation performance and competitiveness: Case of the western European NUTS 2 regions, “Journal of Competitiveness”, Vol. 15, No. 3, 2023, 104–121, DOI: 10.7441/joc.2023.03.06.
36. Montresor S., Quatraro F., Regional Branching and Key Enabling Technologies: Evidence from European Patent Data, “Economic Geography”, Vol. 93, No. 4, 2017, 367–396, DOI: 10.1080/00130095.2017.1326810.
37. Klincewicz K., Robotics in the Context of Industry 4.0: Patenting Activities in Poland and Their Comparison with Global Developments, “Problemy Zarządzania”, Vol. 17, No. 2, 2019, 53–95, DOI: 10.7172/1644-9584.82.3.
38. Dritsaki M., Dritsaki C., Tsianaka E., The effect of macroeconomic and environmental factors on innovation in EU member countries, “Journal of Infrastructure, Policy and Development”, Vol. 7, No. 3, 2023, DOI: 10.24294/jipd.v7i3.2560.
39. Furman J.L., Porter M.E., Stern S., The determinants of national innovative capacity, “Research Policy”, Vol. 31, No. 6, 2002, 899–933, DOI: 10.1016/S0048-7333(01)00152-4.
40. Nazarko J., Chodakowska E., Nazarko Ł., Evaluating the Transition of the European Union Member States towards a Circular Economy, “Energies”, Vol. 15, No. 11, 2022, DOI: 10.3390/en15113924.
41. Alola A.A., Bekun F.V., Obekra H.O., Adebayo T.S., Explaining the environmental efficiency capability of energy mix innovation among the Nordic countries, “Energy Reports”, Vol. 11, 2024, 233–239, DOI: 10.1016/j.egyr.2023.11.051.
42. Baumann M., Domnik T., Haase M., Wulf C., Emmerich P., Rösh C., Zapp. P., Naegler T., Weil M., Comparative patent analysis for the identification of global research trends for the case of battery storage, hydrogen and bioenergy, “Technological Forecasting and Social Change”, Vol. 165, 2021, DOI: 10.1016/j.techfore.2020.120505.
43. Grosse Ruse-Khan H., Metzger A. (eds.), Intellectual Property Ordering Beyond Borders, Cambridge University Press, 2022, DOI: 10.1017/9781009071338.
44. Rusek K., Kleszcz A., Cabellos-Aparicio A., Bayesian inference of spatial and temporal relations in AI patents for EU countries, “Scientometrics”, Vol. 128, No. 6, 2023, 3313–3335, DOI: 10.1007/s11192-023-04699-1.
45. Porter A.L., Markley M., Snead R., Newman N.C. Twenty years of US nanopatenting: Maintenance renewal scoring as an indicator of patent value, “World Patent Information”, Vol. 73, 2023, DOI: 10.1016/j.wpi.2023.102178.
46. Amoroso S., Aristodemou L., Criscuolo C., Dechezleprete A., Dernis H., Grassano N., Moussiegt L., Napolitano L., Nawa D., Squicciarini, M. and Tuebke, A., World Corporate Top R&D investors: Paving the way for climate neutrality, Publications Office of the European Union, Luxembourg, 2021, DOI: 10.2760/49552.
47. Santarelli E., Staccioli J., Vivarelli M., Automation and related technologies: a mapping of the new knowledge base, “Journal of Technology Transfer”, Vol. 48, 2013, 779–813, DOI: 10.1007/s10961-021-09914-w.
48. Goeldner M., Herstatt C., Tietze F., The emergence of care robotics – A patent and publication analysis, “Technological Forecasting and Social Change”, Vol. 92, 2015, 115–131, DOI: 10.1016/j.techfore.2014.09.005.
49. Fang X., Xu H., Chen B., Fang K., Li G., Mao Z., Zheng L., Jiang J., Analysis of Swarm Robotics Cooperative Control Strategy from the Patent Perspective, [In:] 2022 International Symposium on Intelligent Robotics and Systems (ISoIRS), 2022, 159–164, DOI: 10.1109/ISoIRS57349.2022.00039.
50. Kreuchauff F., Korzinov V., A patent search strategy based on machine learning for the emerging field of service robotics, “Scientometrics”, Vol. 111, 2017, 743–772, DOI: 10.1007/s11192-017-2268-3.
51. Kong D., Zhou Y., Liu Y., Xue L., Using the data mining method to assess the innovation gap: A case of industrial robotics in a catching-up country, “Technological Forecasting and Social Change”, Vol. 119, 2017, 80–97, DOI: 10.1016/j.techfore.2017.02.035.
52. Qiu Z., Wang Z., Technology Forecasting Based on Semantic and Citation Analysis of Patents: A Case of Robotics Domain, “IEEE Transactions on Engineering Management”, Vol. 69, No. 4, 2022, 1216–1236, DOI: 10.1109/TEM.2020.2978849.
53. Borregan-Alvarado J., Alvarez-Meaza I., Cilleruelo-Carrasco E., Garechana-Anacabe G., Mapping Technological Profile of Collaborative Robots by Patent Analysis, “International Journal of Human-Computer Interaction”, Vol. 39, No. 20, 2023, 3920–3935, DOI: 10.1080/10447318.2022.2108640.
54. Cséfalvay Z., Gkotsis P., Robotisation race in Europe: the robotisation chain approach, “Economics of Innovation and New Technology”, Vol. 31, No. 8, 2022, 693–710, DOI: 10.1080/10438599.2020.1849968.
55. Ding H., Cai C., Patent Analysis and Structural Synthesis of Epicyclic Gear Trains Used I Automatic Transmissions, “Applied Sciences”, Vol. 10, No. 1, 2019, DOI: 10.3390/app10010082.
56. Zhen-guo L., Gong-chang R., Yue-xin Y., Le W., Application and research of patent evasion design in automatic connection device, “Journal of Physics: Conference Series”, Vol. 1948, 2021, DOI: 10.1088/1742-6596/1948/1/012094.
57. Hu Z., Zhou X., Lin A., Evaluation and identification of potential high-value patents in the field of integrated circuits using a multidimensional patent indicators pre-screening strategy and machine learning approaches, “Journal of Informetrics”, Vol. 17, No. 2, 2023, DOI: 10.1016/j.joi.2023.101406.
58. Saniuk S., Grabowska S., Straka M., Identification of Social and Economic Expectations: Contextual Reasons for the Transformation Process of Industry 4.0 into the Industry 5.0 Concept, “Sustainability”, Vol. 14, No. 3, 2022, DOI: 10.3390/su14031391.
59. Lai M.-L., Using Patent Data to Evaluate the Knowledge Dissemination of the Offshore Wind Power Industry, “IEEE Transactions on Engineering Management”, Vol. 71, 2023, 7128–7133, DOI: 10.1109/TEM.2023.3277481.
60. Svensson R., Patent value indicators and technological innovation, “Empirical Economics”, Vol. 62, No. 4, 2022, 1715–1742, DOI: 10.1007/s00181-021-02082-8.
61. Tümer A.E., Kabaklarlı E., Forecasting Gross Domestic Product (GDP) of OECD Countries Based on Digital Transformation Indicators: ANN Approach, “EDPACS”, Vol. 69, No. 1, 2024, 88–102, DOI: 10.1080/07366981.2024.2312015.
62. Hamzah A.S.S.S.A., Saipan@Saipol H.F., Nordin S.Z., Shaffiei Z.A., Ohshima N., Adopting Text Mining for Patent Analysis to Determine the Attribute and Segment in Automotive Industries, “Journal of Advanced Research in Applied Sciences and Engineering Technology”, Vol. 37, No. 2, 2024, 94–103, DOI: 10.37934/araset.37.2.94103.
63. Mann K., Puttmann L., Benign Effects of Automation: New Evidence from Patent Texts, “The Review of Economics and Statistics”, Vol. 105, No. 3, 2023, 562–579, DOI: 10.1162/rest_a_01083.
64. Chen P.P.J., Trappey A.I.C., Lin B.H.L., Trappey C.V., Patent Analytics of Robotics Technology for Intelligent Manufacturing in the Semiconductor Industry, [In:] 2018 IEEE 22nd International Conference on Computer Supported Cooperative Work in Design (CSCWD), 2018, 213–217, DOI: 10.1109/CSCWD.2018.8465276.
Other sources
65. OECD, Eurostat, Oslo Manual 2018: Guidelines for Collecting, Reporting and Using Data on Innovation, 4th Edition, [In:] The Measurement of Scientific, Technological and Innovation Activities, OECD, 2018, DOI: 10.1787/9789264304604-en.
73. World Intellectual Property Organization, The WIPO Manual on Open Source Analytics, 2nd edition, 2022, [https://wipo-analytics.github.io/manual/index.html].
74. World Intellectual Property Organization, Global Innovation Index 2023. Innovation in the face of uncertainty, 16th edition, 2023, DOI: 10.34667/tind.48228.
75. Es-Sadki N., Hollanders H., European Innovation Scoreboard 2023, Report, Publications Office of the European Union.
76. World Intellectual Property Organization, World Intellectual Property Indicators 2023, DOI: 10.34667/tind.48541.
77. OECD, OECD Science, Technology and Industry Scoreboard 2017, OECD, 2017, DOI: 10.1787/9789264268821-en.
78. World Intellectual Property Organization, WIPO Statistical Country Profiles, 2022, [https://wipo.int/ipstats/en/statistics/country_profile].
87. World Intellectual Property Organization, World Intellectual Property Report 2024: Making Innovation Work for Development, 2024, DOI: 10.34667/tind.49284.
89. Go ogle, Google Patents, [https://patents.google.com].
90. Clarivate, Top 100 Global Innovators 2024, [clarivate.com/top-100-innovators].
Porównanie krajów pod względem zdolności innowacyjnych w obszarze automatyki i robotyki
Streszczenie: W dzisiejszym dynamicznym i globalnym środowisku gospodarczym innowacje technologiczne są kluczowym wyznacznikiem międzynarodowej konkurencyjności. W dziedzinie automatyki i robotyki szczególne znaczenie ma rozwój nowoczesnych technologii, które wpływają nie tylko na postęp przemysłowy, ale także na aspekty społeczne. Automatyka i robotyka odgrywają kluczową rolę w koncepcji nowoczesnego przemysłu, przyczyniając się do tworzenia bardziej zrównoważonych, elastycznych i skoncentrowanych na człowieku systemów produkcyjnych. Artykuł ma na celu pogłębioną analizę aktywności patentowej w dziedzinie automatyki i robotyki w Europie. Dokumentacja patentowa jest źródłem wiedzy o kierunkach badań, działalności wynalazczej, a co za tym idzie, potencjale innowacyjnym i konkurencyjnym gospodarki. Liczba patentów w czasie odzwierciedla dynamikę rozwoju technologicznego kraju. W artykule przedstawiono dotychczasowe wykorzystanie baz patentowych do oceny innowacyjności krajów, w tym w automatyce i robotyce. Przeprowadzona analiza danych dotyczących krajów europejskich pozwoliła na identyfikację trendów w oparciu o Międzynarodową Klasyfikację Patentową, a także specjalizacji z perspektywy geograficznej za pomocą wskaźników ujawnionej komparatywnej przewagi technologicznej. Kraje europejskie sklasyfikowano za pomocą analizy skupień, wykazując różnorodność i identyfikując liderów w każdej grupie.
Słowa kluczowe: patenty, innowacje, przemysł przyszłości, robotyzacja, automatyzacja, UE
Ewa Chodakowska, DSc, PhD, Eng
e.chodakowska@pb.edu.pl
ORCID: 0000-0003-1724-192X
Associate Professor at the Faculty of Engineering Management, Bialystok University of Technology. Member of the Committee of Production Engineering of the Polish Academy of Sciences. Also, a member of IEEE and the Engineering, Project, and Production Management Association. Head of Interdisciplinary Doctoral Studies at BUT (2020–2023). She received her PhD in Management Sciences from the University of Warsaw and her DSc in Technical Sciences in Mechanical Engineering from Cracow University of Technology. Her areas of research interest include data analysis, modelling and simulation, artificial intelligence models and applications, multi-criteria decision making, technology assessment, and the future industry. She is the author or co-author of over 50 publications.
Andrzej Polecki, MSc, Eng andrzejpolecki690@gmail.com
ORCID: 0009-0002-7651-174X
Graduate of the Faculty of Mechanical Engineering at the Bialystok University of Technology and doctoral studies at the Faculty of Mechanical Engineering at the Lodz University of Technology. He has been working as a teacher of vocational courses at a secondary technical school since 2002, teaching, e.g. students aspiring to be automation and robotics technicians. He is a supervisor of innovative projects in the field of mechatronics and robotics. He received an honorary diploma from the Federation of Scientific and Technical Associations for his involvement in fostering an innovative mindset among students. He is interested in automation, robotics, CNC machines and plastics processing.
Automatyczna diagnostyka elementów
toru
kolejowego z użyciem sieci neuronowych głębokiego uczenia
Piotr Bojarczak, Waldemar Nowakowski Uniwersytet Radomski im. Kazimierza Pułaskiego, ul. Malczewskiego 29, 26-600 Radom
Streszczenie: W artykule omówiono metodę automatycznej diagnostyki szlaku kolejowego. Polega ona na automatycznej ocenie stanu technicznego wybranych elementów toru, takich jak szyny, podkłady drewniane, podkłady betonowe, przytwierdzenia podkładów oraz rozjazdy. Przeprowadzono ją na podstawie analizy obrazów wideo elementów toru kolejowego zarejestrowanych przez dwie kamery linijkowe umieszczone na drezynie pomiarowej. Do oceny stanu technicznego badanych elementów zastosowano wybraną sieć neuronową głębokiego uczenia FCN-8. Określono też skuteczność zastosowanego algorytmu na podstawie takich miar jak IoU, Precision, Recall. Przedstawiono wnioski dotyczące zastosowania sieci FCN-8 w automatycznej klasyfikacji cech wybranych elementów toru kolejowego. Uzyskane rezultaty porównano z innymi metodami wykorzystywanymi w diagnostyce wizyjnej.
Słowa kluczowe: diagnostyka wizyjna toru kolejowego, algorytmy uczące, przetwarzanie obrazów
1. Wprowadzenie
Stan toru kolejowego ma istotny wpływ na bezpieczeństwo jazdy pociągów. Jest to szczególnie istotne przy zwiększających się prędkościach pociągów oraz stałym wzroście masy towarów i liczby pasażerów. Wiele wypadków kolejowych jest spowodowanych złym stanem elementów torów, takich jak podkłady i elementy mocujące szynę do podkładów kolejowych. Każdy wypadek generuje straty finansowe. Dlatego ciągłe monitorowanie infrastruktury torowej jest niezmiernie ważne dla zapewnienia bezpieczeństwa ruchu [27]. Kontrolę stanu szyn sieci PKP realizuje się głównie metodami ultradźwiękowymi [23]. Stosuje się w tym celu wagon z zamontowaną zautomatyzowaną aparaturą do defektoskopii ultradźwiękowej. Inne elementy toru kolejowego, takie jak podkłady i przytwierdzenia szyn kontroluje się obecnie w Polsce bez użycia specjalistycznej aparatury pomiarowej. W uzasadnionych przypadkach przeprowadza się ręczne badania wybranych odcinków toru. Wykonuje je przeszkolony w tym celu personel, wyposażony w ręczne defektoskopy ultradźwiękowe. Jest to jednak sposób mało efektywny, ponieważ diagnosta może skontrolować tylko niewielki odcinek
Autor korespondujący: Piotr Bojarczak, p.bojarczak@uthrad.pl
Artykuł recenzowany nadesłany 20.01.2024 r., przyjęty do druku 22.07.2024 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
toru. Ponadto skuteczność takiego sprawdzania zależy też od indywidualnych predyspozycji pracownika.
Badania torów kolejowych obejmują następujące czynności [11]:
−wykrywanie wad powierzchniowych w główce szyny, −wykrywanie uszkodzeń przytwierdzeń szyn do podkładów, −wykrywanie pęknięć w podkładach, −p omiar szerokości toru, −diagnostyka stanu podsypki.
Rozwój metod wizyjnych oraz algorytmów sztucznej inteligencji spowodował, że do powyższych zadań coraz częściej stosuje się nowe metody i technologie. Ogromny postęp w rozwoju przetworników wizyjnych CMOS i procesorów graficznych zaowocował powstaniem komercyjnych kamer liniowych i wysoce wydajnych serwerów graficznych. Można je stosować jako elementy systemu wizyjnego do kontroli elementów torów kolejowych. System taki można zainstalować m.in. na wagonie ultradźwiękowym lub wagonie do pomiaru geometrii torów. Stanowi on bazę do implementacji zaawansowanych algorytmów wizualnych.
W artykule przedstawiono metodę pozwalającą na zautomatyzowaną detekcję stanu technicznego elementów toru kolejowego. Do jej realizacji autorzy zastosowali w pełni konwolucyjną sieć z 8-krotnym upsamplingiem (FCN-8) do segmentacji obrazu torów kolejowych na obszary zawierające podsypkę, podkłady, łączniki, szyny i rozjazdy. System może rozróżnić podkłady drewniane i betonowe. Może również wykrywać cztery rodzaje przytwierdzeń szyn do podkładów, tj.: SB, KS, W-14, K (rys. 1). Skuteczność proponowanego rozwiązania przetestowano też dla różnych poziomów jasności obrazów toru kolejowego.
Rys. 1. Typy przytwierdzeń szyn do podkładów kolejowych: a) typ SB (Przytwierdzenie 1), b) typ KS (Przytwierdzenie 2), c) typ W-14 (Przytwierdzenie 3), d) typ K (Przytwierdzenie 4) [39]
Fig. 1. Types of rail fastenings to railroad sleepers: a) type SB (Fastening 1), b) type KS (Fastening 2), c) type W-14 (Fastening 3), d) type K (Fastening 4) [39]
2. Aktualny stan badań
W ciągu ostatnich dwóch dekad systemy wizyjne stały się łatwo dostępne i znalazły zastosowanie również w kolejnictwie. Systemy te początkowo jedynie rejestrowały obrazy szlaku kolejowego przeznaczone do sprawdzenia przez przeszkolony personel. Następnie pojawiły się bardziej zaawansowane systemy. Istnieje wiele artykułów opisujących algorytmy do wykrywania elementów toru kolejowego. W pracy [1] przedstawiono algorytm do wykrywania przytwierdzeń podkładów do szyn. Wykorzystuje on banki filtrów. Analizowany obraz jest filtrowany indywidualnie przez każdy filtr. Rodzaj przytwierdzenia do podkładów wykrywa się przyporządkowanym mu filtrem. W tym celu zastosowano filtr korelacyjny (OT-MACH) (ang. Optimal Trade-off Maximum Average Correlation Height) [22]. Występowanie przytwierdzenia w analizowanym obrazie poszukuje się przez porównywanie fragmentu obrazu ze wzorcem przytwierdzenia jako uśrednioną postacią spektrum elementu jego obrazu. Uśrednianie przeprowadza się dla wielu obrazów przytwierdzenia. Na bieżąco oblicza się statystykę określająca średnią oraz wariancję odległości między znajdującymi się obok siebie wykrytymi przytwierdzeniami. Gdy odległość między ostatnio wykrytym przytwierdzeniem (wykrywanie przy pomocy filtru OT-MACH) a jego sąsiadem odbiega od tej statystyki, wówczas oznacza to, że między nimi znajduje się przytwierdzenie niewykryte przez algorytm. Zaproponowany algorytm pozwolił na wykrywanie przytwierdzeń z dokładnością ponad 90 %. Metody, które rozpoznają takie elementy toru jak podkłady kolejowe, elementy przytwierdzeń – podkładki, kolce i kotwy, autorzy przedstawili w pracy [28]. Podkłady i podkładki wykrywa się przy użyciu filtru krawędziowego wraz z transformatą Hougha. Kolce i kotwy rozpoznaje się za pomocą algorytmu AdaBoost. W pracy [14] wykorzystuje się falki Haara jako cechy opisujące elementy złączne na obrazie toru. Wykrywa się je za pomocą klasyfikatora (detektora) zbudowanego przy użyciu probabilistycznego modelu graficznego (PGM). W pracy [31] zaproponowano algorytm wykrywający uszkodzenia przytwierdzeń pośrednich. W tym celu stosuje się transformację falkową
oraz PCA (ang. Principial Component Analysis ) do ekstrakcji cech. Do detekcji (klasyfikacji) przytwierdzeń użyto sieci RBF (ang. Radial Basis Function ) oraz MLP (ang. Multilayer Perceptron).
Inne podejście do wykrywania przytwierdzeń typu VOSSLOH przedstawia praca [37]. Natomiast w pracy [17] wykorzystano jako cechy histogram zorientowanych gradientów (HOG), a maszynę wektorów nośnych SVM (ang. Support Vector Machine) jako klasyfikator do wykrywania elementów złącznych na obrazie. Algorytm zaprezentowany w [19] umożliwia wykrywanie szyn, podkładów i płyt przytwierdzeń. Wykorzystano w tym celu filtr Canny’ego, transformatę Hougha i operacje morfologiczne do ekstrakcji cech oraz drzewo decyzyjne (algorytm C4.5) jako klasyfikator. W pracy [3], do zlokalizowania szyny na obrazie wykorzystuje się rozkład średniej energii współczynników szczegółów pionowych dla czwartego poziomu dekompozycji transformaty falkowej 2D obrazu. W pracy [35] wykorzystano bank filtrów Gabora do ekstrakcji cech i SVM jako klasyfikator do segmentacji podkładów drewnianych od podsypki. W powyższych artykułach cechy są wyodrębniane i wybierane ręcznie. Ponadto detektor zawiera dwa oddzielne etapy działania: ekstrakcji cech i budowy klasyfikatora. Proces taki nazywany jest uczeniem płytkim. Głównym problemem jest tu ograniczony zbiór cech, z którego są one wyodrębniane. Z kolei może to czasami prowadzić do selekcji cech, które nieprecyzyjnie opisują wykrywane obiekty. Przełomem w dziedzinie uczenia maszynowego było pojawienie się pracy dotyczącej zastosowania głębokiej sieci konwolucyjnej w detekcji obiektów [21]. Głęboka sieć neuronowa tworzy zbiór cech o rozmiarze znacznie większym niż dla płytkiego uczenia, praktycznie ograniczonego rozmiarem analizowanego obrazu. Ponadto ekstrakcja cech i budowa klasyfikatora są wykonywane w jednym etapie podczas procesu uczenia, a cechy są wybierane niezależnie od użytkownika. Od tego czasu wielu badaczy próbowało zastosować głębokie sieci neuronowe do wizyjnej inspekcji torów kolejowych. Na przykład w [16] stosuje konwolucyjną sieć składającą się z czterech warstw konwolucyjnych do monochromatycznych obrazów torów kolejowych. Umożliwia ona wykrywanie 10 rodzajów tekstur, w tym podsypki, szyn, podkładów drewnianych i betonowych. W pracy [15] do segmentacji obrazu wykorzystuje się również sieć konwolucyjną składającą się z czterech warstw. Dodatkowo rozpoznaje przytwierdzenia szyn i klasyfikuje je na klasy zawierające egzemplarze normalne i uszkodzone przytwierdzenia. Klasyfikację przeprowadza się przez połączenie sieci konwolucyjnej z SVM. W pracy [32] użyto wstępnie wytrenowanej szybszej sieci R-CNN do przeprowadzania segmentacji analizowanego obrazu na powierzchnie toru i na przytwierdzenia. Segmentację tę wykorzystuje się do identyfikacji anomalii. Następnie zastosowano GAN (ang. Generative Adversarial Network) do grupowania normalnych i anormalnych obserwacji. Praca [12] przedstawia zastosowanie sieci głębokich (AlexNet i ResNet) w rozpoznawaniu defektów przytwierdzeń.
W ostatnich kilku latach opublikowano wiele artykułów dotyczących zastosowania głębokich sieci neuronowych w wykrywaniu obiektów na obrazach. Na przykład w [33] przedstawiono sieć You Only Look Once (YOLO). Wykorzystuje ona do detekcji obiektów w obrazach zarówno informacje kontekstowe, jak i związane z ich wyglądem. Pozwala to na przetwarzanie obrazów z szybkością do 50 klatek na sekundę. Inną szybką sieć SSD (ang. Single Shot Multibox Detector) przedstawiono w pracy [29]. Pozwala ona na detekcję obiektów z prędkością do 58 klatek na sekundę. Kolejna sieć [34] o nazwie Faster R-CNN składa się z dwóch podsieci: Region Proposal Network (RPN) i drugiej sieci, która wykonuje ostateczną detekcję obiektu w obszarze
wskazanym przez RPN. Pomimo wysokiej precyzji wykrywania, przetwarza ona obrazy ze stosunkowo małą szybkością 5 kl./s. We wszystkich powyższych sieciach pozycję wykrytego obiektu oznacza się ograniczającą ramką wyśrodkowaną na tym obiekcie. Sieć Mask R-CNN [18], oprócz generowania obwiedni, tworzy również maskę dla wykrytego obiektu. Cały proces wykrywania jest podzielony na dwa etapy. Najpierw sieć o architekturze bardzo podobnej do Faster R-CNN wykrywa obiekt i zaznacza go obwiednią. Następnie inna sieć przeprowadza segmentację semantyczną w obszarze ograniczonym do tej obwiedni. W rezultacie każdemu punktowi w obwiedni przypisywana jest etykieta obiektu, jeśli do niego należy, lub etykieta tła, jeśli do niego nie należy. Sieć Mask R-CNN działa z szybkością do kilku klatek na sekundę. Inną grupę stanowią sieci stosowane wyłącznie do semantycznej segmentacji obrazów. Obejmuje ona sieci o nazwach: DeepLabv1 [8], DeepLabv2 [7], DeepLabv3 [9], DeepLabv3Plus [10] oraz Fully Convolutional Network (FCN) [30]. Architektury sieci DeepLabv1 i DeepLabv2 są podobne. Obie wykorzystują sieć Deep Convolutional Network wraz z Atrous Convolution i Fully Connected Conditional Random Field (CRF) do segmentacji obrazu. Dodatkowo sieć DeepLabv2 jest wyposażona w moduł Atrous Spatial Pyramid Pooling (ASPP), który pozwala zwiększyć dokładność segmentacji. ASPP integruje cechy z wielu skal. Dzięki temu można łatwo zidentyfikować obiekty o różnych wymiarach. DeepLabv3 – to zmodyfikowana wersja DeepLabv2, w której Atrous zastąpiono pojedynczym modułem ASPP. W DeepLabv3 usunięto również moduł CRF. Aby bardziej zwiększyć dokładność, w najnowszej wersji o nazwie DeepLabv3plus dodano moduł dekodera. Mimo stosunkowo wysokiej precyzji wykrywania, przetwarzają one obraz z szybkością 8 FPS, co sprawia, że nie mogą działać w czasie rzeczywistym.
Nabyte przez autorów doświadczenia w przetwarzaniu obrazów, w budowie i działaniu sieci neuronowych oraz w specyfice zagadnień diagnostyki toru kolejowego, zaowocowały powstaniem szeregu prac o wykorzystaniu, przetwarzaniu oraz analizie sygnałów i obrazów w diagnostyce toru kolejowego. W pracy [24] przedstawiono zastosowanie sieci SVM wraz z transformacją falkową oraz przekształcenie
Piotr Bojarczak, Waldemar Nowakowski
PCA (ang. Principial Component Analysis) do wykrywania wad typu head checking na podstawie sygnałów uzyskanych w oparciu o metodę magnetycznej pamięci metalu. W pracy [4] zaprezentowano wykorzystanie filtrów entropijnych oraz sieci neuronowych do określania stanu drewnianych podkładów kolejowych. Kolejne prace [5, 6] przedstawiają sposób detekcji przytwierdzeń szyn do podkładów na podstawie ich obrazów z wykorzystaniem sieci SVM oraz transformacji falkowej. W [2] przedstawiono metodę ekstrakcji szyny z obrazu, która stanowi element składowy algorytmów wizyjnej diagnostyki toru kolejowego. Natomiast w [25] zaprezentowano wykorzystanie skatometrii laserowej wraz z transformacją falkową oraz teorią zbiorów rozmytych do detekcji wad typu head checking . W pracy [27] zaprezentowano inteligentne klasyfikatory do klasyfikacji wad kontaktowo-naprężeniowych w szynach kolejowych. W kolejnej pracy [26] przedstawiono algorytmy przetwarzania oraz klasyfikacji obrazów ultradźwiękowych pochodzących z badań metodą TOFD.
3. Metoda badawcza
W proponowanym rozwiązaniu struktury systemu diagnostycznego możliwe jest wykrywanie elementów toru i określanie stopnia pokrycia podkładu przez podsypkę. Użyto w nim sieci konwolucyjnej z 8-krotnym powiększeniem (dalej nazywanym w artykule upsamplingiem) do oryginalnego rozmiaru obrazu, która nazywa się FCN-8 [30]. Przeprowadza ona semantyczną segmentację obrazu. Podczas tego procesu sieć przypisuje etykietę do każdego piksela w obrazie. Jej wartość zależy od obiektu, do którego należy piksel. Główną strukturą tej sieci jest konwolucyjna sieć neuronowa (CNN). Istnieją trzy główne architektury CNN: AlexNet, VGGNet i GoogLeNet. Według [30] VGGnet ma najwyższą dokładność segmentacji spośród wymienionych tu sieci. Dlatego też została ona wybrana do realizacji naszego systemu. Sieć VGGNet, zwana też VGG-16, składa się ze stosu warstw konwolucyjnych, ReLu i Pooling, po których następują trzy w pełni połączone warstwy. Warstwa konwolucyjna wykonuje operację splotu (konwolucji) zdefiniowaną jako: (1)
gdzie: () 0,,1,iP∈− () 0,,1,jR∈− () 0,,1zZ∈− – współrzędne macierzy wyjściowej B warstwy odpowiednio wzdłuż osi X, Y, Z; A – macierz wejściowa warstwy o wymiarze P × R × N; W – macierz wag o wymiarach K × K × N × Z
Rys. 2. Przykład splotu (konwolucji) dla macierzy A o wymiarze 10 × 10 × 1 oraz macierzy wag W o wymiarze 3 × 3 × 1 × 1
Fig. 2. Example of convolution for matrix A of size 10 × 10 × 1 and weight matrix W of size 3 × 3 × 1 × 1
Rys. 3. Idea operacji 4-krotnego upsamplingu
Fig. 3. Illustration of 4 times upsampling
K określa szerokość filtru/jądra, Z odpowiada liczbie filtrów używanych w tej warstwie, a b jest wektorem odchylenia (ang. bias) o wymiarze Z. Podmacierz macierzy W o wymiarze K × K × N odpowiada pojedynczemu neuronowi, dołączonemu do ograniczonej liczby wejść określonych przez K × K × N. Warstwa ta wykonuje operację B = f(A, W) przekształcającą macierz A o wymiarze P × R × N w macierz B o wymiarze P × R × Z W przypadku pierwszej warstwy sieci macierz A odpowiada obrazowi wejściowemu i N = 3 (składowe R, G, B obrazu).
Macierz wyjściowa B poddawana jest nieliniowej funkcji aktywacji ReLu w postaci C = max(0, B). Dodatkowo, co kilka warstw konwolucyjnych macierz C o wymiarze P × R × Z redukuje się do P/2 × R/2 × Z przez podpróbkowanie lub łączenie [30]. Ostatnie trzy warstwy, to warstwy w pełni połączone. Oznacza to, że każdy neuron tej warstwy jest połączony ze wszystkimi wejściami poprzedniej warstwy. Ostatnia warstwa składa się z 1000 neuronów. Każdy neuron w tej warstwie jest odpowiedzialny za wskazanie jednej klasy obiektów występujących w analizowanym obrazie. Według [30], w pełni połączoną warstwę można postrzegać jako warstwę konwolucyjną z filtrem/ jądrem, która pokrywa całe regiony wejściowe. W rezultacie tworzy się zgrubną mapę o rozmiarze H/32 × G/32 × 1000, gdzie H i G oznaczają odpowiednio wysokość i szerokość analizowanego obrazu. Najprostsza metoda polega na 32-krotnym upsamplingu mapy zgrubnej do rozmiaru oryginalnego obrazu. Jednak uzyskany wynik jest również bardzo zgrubny. Upsampling polega na zwiększeniu wymiaru oryginalnego obrazu przez umieszczenie między kolejnymi jego punktami dodatkowych punktów. Intensywność tych punktów jest określana na podstawie punktów oryginalnego obrazu z wykorzystaniem interpolacji bilinearnej.
Aby poprawić dokładność segmentacji, informacje pochodzące z kilku wcześniejszych warstw dodaje się do zgrubnej formy. Zgodnie z [13] operację upsamplingu można wykonać przy użyciu transponowanej konwolucji. FCN-8 sumuje 2 × upsamplowaną warstwę conv7 z warstwą pool4. Następnie wynik jest upsamplowany dwa razy i sumowany z warstwą pool3. Ostateczna mapa segmentacji jest tworzona przez 8-krotny upsampling uzyskanego wyniku – rys. 4.
Wartości wszystkich parametrów (wag) sieci określa się w trakcie procesu uczenia przez minimalizację następującej funkcji celu:
1 1 log S ii i LPxQx S = =− ∑ (2)
gdzie:
P(xi) – prawdopodobieństwo określające, do której klasy należy piksel xi. Ma ono postać wektora P = [p1, …, pt, …, pK]. K jest liczbą klas (grup), na jakie klasyfikowany jest piksel xi (tutaj K = 9: cztery rodzaje przytwierdzeń + dwa rodzaje podkładów + szyna + rozjazd + tło). Do każdego elementu wektora przypisana jest z góry ustalona klasa. Na przykład, jeśli p1 odpowiada klasie podkład betonowy wówczas, gdy piksel xi należy do niej, element p1 przyjmuje wartość 1, natomiast pozostałe elementy wartość 0. Wartości te są przypisywane w oparciu o dostępne dane uczące.
Q(xi) – prawdopodobieństwo określające, do której klasy należy piksel xi. Jego postać jest taka sama jak w przypadku prawdopodobieństwa P(xi) – wektor Q = [q1, …, qt, …, qK] z tą różnicą, że elementy wektora nie są przypisywane na podstawie danych uczących (wartości 1 lub 0). Elementy tego wektora są generowane przez sieć dla aktualnych wartości jej wag. Aby zapewnić, że suma elementów generowanego przez sieć neuronową wektora Q jest równa 1 (suma wszystkich prawdopodobieństw wynosi 1), każde pojedyncze wyjście sieci neuronowej podlega normalizacji z wykorzystaniem funkcji softmax zdefiniowanej jako:
1 t r y t K y r e q e = = ∑ (3)
gdzie qt jest t-tym elementem wektora Q, zaś yt jest t-tym wyjściem sieci neuronowej podlegającym normalizacji przez funkcję softmax
S – całkowita liczba danych uczących przekazanych sieci podczas procesu uczenia.
Gdy funkcja celu jest bliska 0, oba rozkłady prawdopodobieństwa są prawie takie same, tj. ()()pxqx ≈ i proces uczenia zostaje zatrzymany.
4. Wyniki eksperymentów
Na potrzeby badań zdecydowano się przyuczyć sieć już wytrenowaną do wykrywania elementów toru kolejowego. Proces ten, nazywany po angielsku transfer learning, oznacza, że model opracowany dla jednego zadania, jest ponownie wykorzystywany jako punkt wyjścia dla modelu w drugim zadaniu [36].
Rys. 4 Schemat blokowy sieci neuronowej FCN-8
Fig. 4. Block diagram of FCN-8
W taki sposób można znacznie przyspieszyć uczenie i poprawić skuteczność detekcji realizowanej przez zaproponowany model sieci. W tym celu użyto wstępnie wytrenowaną sieć VGG-16 jako bazę do opracowania systemu wizyjnego opartego na FCN-8. Sieć została zbudowana z użyciem pakietu Tensorflow.
4.1. Dane źródłowe
Obrazy torów kolejowych zostały zarejestrowane w postaci plików wideo. W tym celu użyto dwóch kamer linijkowych, zamontowanych pod podłogą wagonu diagnostycznego. Kamery umieszczone są prostopadle do toru. Jedna kamera obejmuje lewą połowę toru, a druga prawą połowę toru.
Rys. 5. Program do annotacji obrazów, a) zrzut ekranu, b) obraz poddawany annotacji, c) obraz z zaznaczoną maską odpowiadającą obrazowi na rys. 5b)
Fig. 5. Image annotation program, a) screenshot, b) image being annotated, c) image with marked mask corresponding to the image in Fig. 5b)
4.2. Analiza wydajności sieci
Uczenie sieci przeprowadzono dla 400 epok1 wykorzystując do tego celu kartę graficzną NVIDIA GeForce GTX 1080 Ti GPU. Do optymalizacji użyto pakietu AdamOptimizer, dla którego ustalono: współczynnik uczenia Lr = 0,0001, współczynnik wygaszania wag w_dec = 0,0005 oraz momentum = 0,9. Podczas uczenia wykorzystano dwie grupy danych: train_data do szkolenia i valid_data do testowania. Po uczeniu wydajność sieci zweryfikowano na zestawie danych testowych. Wykorzy-
1 Jedna epoka odpowiada pojedynczej aktualizacji wag sieci na podstawie aktualnej wartości funkcji błędu zdefiniowanej przez wzór (2)
Piotr Bojarczak, Waldemar Nowakowski
stano tu cztery metryki, a mianowicie: dokładność pikseli (ang. pixel accuracy), przecięcie IoU (ang. Intersection over Union), precyzję (ang. precision) oraz przypominanie (ang. recall). Dokładność pikseli oblicza się jako procent pikseli w obrazie, które poprawnie sklasyfikowano. Określa się ją za pomocą następującej zależności:
Pixelaccuracy
gdzie:
TP (ang. true positive) – wynik prawdziwie pozytywny, reprezentuje piksele, co do których przewidziano, że należą do danej klasy (zgodnie z maską docelową (prawdy)),
TN (ang. true negative) – wynik prawdziwie negatywny – reprezentuje piksele, które zostały poprawnie zidentyfikowane jako nienależące do danej klasy,
FP (ang. false positive) – wynik fałszywie pozytywny – reprezentuje piksele, co do których przewidziano, że należą do danej klasy, choć do niej nie należą,
FN (ang. false negative) – wynik fałszywie negatywny – oznacza piksele, które zostały zidentyfikowane jako nienależące do danej klasy, choć do niej należą.
Druga metryka zwana Intersection over Union (IoU), określana również jako indeks Jaccarda, jest zasadniczo metodą ilościowego określania procentowego nakładania się maski docelowej (prawdy) i wyników predykcji. IoU określa liczbę pikseli wspólnych dla maski docelowej i predykcyjnej podzieloną przez całkowitą liczbę pikseli obecnych w obu maskach:
gdzie:
T_M – piksele należące do maski docelowej, P_P – reprezentuje piksele przewidywane jako należące do maski docelowej.
Precyzja jest określona jako stosunek prawidłowo sklasyfikowanych pikseli należących do danej klasy, do całkowitej liczby pikseli sklasyfikowanych jako należące do tej klasy:
Przypominanie jest określone jako stosunek prawidłowo sklasyfikowanych pikseli należących do danej klasy do całkowitej liczby pikseli należących do niej:
TP Recall TPFN = + (7)
W tabeli 1 przedstawiono średnie wartości tych czterech metryk obliczone dla elementów toru kolejowego. Wartości te zostały określone na podstawie zestawu test_data danych testowych. Średni czas przetwarzania dla tego systemu wyniósł 67 ms. Przeprowadzono też porównanie uzyskanych wyników z innymi pracami. W pracy [19] wykorzystano filtr Cannyego wraz z drzewami decyzyjnymi do detekcji elementów toru. Średnia wartość miary dokładności (ang. pixel accuracy) dla tego systemu wynosiła 0,83 (u nas: 0,891). Natomiast czas przetwarzania wyniósł 166 ms. W pracy [20] przedstawiono system do detekcji zwrotnic, w którym wykorzystano filtr Cannyego oraz
Tabela 1. Wartości miar dla elementów toru kolejowego
Table 1. Measure values for railroad track elements
Podkład drewniany 0,876
Podkład betonowy 0,965
Przytwierdzenie 1
Przytwierdzenie 2
Przytwierdzenie 3
Przytwierdzenie 4
transformatę Hougha. Średnia wartość miary dokładności dla tego systemu wynosiła 0,88, natomiast średni czas przetwarzania wyniósł 221 ms.
Na rysunku 6 przedstawiono przykłady segmentacji obrazu dla różnych elementów toru. Pierwsza kolumna przedstawia obraz toru, druga obraz z nałożoną przewidywaną maską, a ostatnia – tę maskę. Każdej klasie wykrywanych pikseli przyporządkowany jest z góry ustalony kolor. Na przykład wszystkie piksele należące do klasy rozjazd są zawsze zaznaczane przez model kolorem brązowym, piksele należące do klasy podkład betonowy kolorem amarantowy zaś piksele należące do klasy podkład drewniany kolorem fioletowym. Proponowana sieć FCN-8 może segmentować obraz nawet wtedy, gdy tor jest częściowo pokryty śniegiem – rys. 6 wiersz 1. Ponadto sieć może wykryć sytuację, gdy podkład jest częściowo pokryty tłuczniem – rys. 6 wiersz 3, wiersz 4. Przedstawiony system przetwarza pojedynczy obraz ze średnią szybkością 15 klatek na sekundę.
Zaproponowany algorytm pozwala na wykrycie takich elementów infrastruktury kolejowej jak: szyna, cztery rodzaje przytwierdzeń, podkłady betonowe i drewniane oraz rozjazdy. Dodatkowo określenie stopnia pokrycia podkładów
Tabela 2. Wartości względnej dokładności dla różnych mnożników S
Table 2. Relative values of pixel accuracy for different multipliers S
przez tłuczeń pozwala na pośrednią ocenę stanu podtorza. Wykrycie stałych elementów infrastruktury takich jak rozjazdy umożliwia również cykliczną korekcję błędu położenia drezyny pomiarowej na szlaku. Zaproponowany system powinien potencjalnie umożliwić wykrywanie uszkodzeń przytwierdzeń szyn do podkładów oraz podkładów. Aby to zrealizować należy wprowadzić do danych uczących dodatkowe obrazy zawierające klasy reprezentujące różnego typu uszkodzenia. Liczba dostępnych przykładów uszkodzeń przytwierdzeń oraz podkładów jest ograniczona, co w przypadku modelu opartego na sieciach głębokich wymaga zgromadzenia ich większej ilości bądź też sztucznego zwiększenia ich wolumenu przez wykorzystanie metod opisanych w [38]. Będzie to kolejnym etapem naszych badań.
4.3. Analiza niezmienności jasności obrazu
Sprawdzono odporność algorytmu na zmiany jasności obrazu. W tym celu sztucznie zmieniano jasność każdego obrazu należącego do zbioru test_data. Osiągnięto to przez konwersję modelu obrazu RGB na model HSV (ang. Huge, Saturation, Value), w którym składowa V odpowiada za jasność obrazu. Jasność każdego obrazu zmieniono w następujący sposób:
Mnożnik S S=0,1S=0,2S=0,3S=0,4S=0,5S=0,6S=0,7S=0,8S=0,9S=1,0 Szyna 0,260,450,510,540,930,950,960,980,991,0
Podkład drewniany 0,340,730,760,810,890,920,970,980,981,0
Rys. 6. Przykłady wykrywania elementów toru: wiersz 1) i wiersz 2) – przytwierdzenie 1, podkład betonowy; wiersz 3) – przytwierdzenie 2 i podkład betonowy; wiersz 4) – przytwierdzenie 2 i podkład drewniany; wiersz 5) – przytwierdzenie 3 i podkład betonowy; wiersz 6) –przytwierdzenie 4, podkład drewniany i rozjazd; wiersz 7) – łącznik 4, podkład betonowy i rozjazd Fig. 6. Examples of detecting track elements: line 1) and line 2) – fastener1, concrete sleeper; line3) – fastener 2 and concrete sleeper; line 4) – fastener 2 and wooden sleeper; line 5) – fastener 3 and concrete sleeper; line 6) – fastener 4, wooden sleeper and turnout; line 7) – fastener 4 concrete sleeper and turnout
nom ISI =⋅ (8) gdzie: S – mnożnik z zakresu [0,1, 0,2, ..., 0,9, 1,0], I nom – jasność każdego piksela na oryginalnym (niezmodyfikowanym) obrazie.
Każdy zmodyfikowany zestaw test_data zawierający obrazy z predefiniowanym poziomem jasności przekazano wytrenowanej
sieci. Następnie obliczono średnią dokładność pikseli i wskaźniki IoU dla obrazów wygenerowanych przez sieć i powiązano je ze średnią dokładnością pikseli i wskaźnikami IoU uzyskanymi dla poziomu jasności I nom (S = 1).
W tabeli 2 przedstawiono związek między względną dokładnością pikseli i mnożnikiem S. Natomiast w tabeli 3 – związek między względną metryką IoU i mnożnikiem S
Tabela 3. Wartości względne IoU dla różnych mnożników S
Table 3. Relative values of IoUs for different multipliers S
Mnożnik S S=0,1S=0,2S=0,3S=0,4S=0,5S=0,6S=0,7S=0,8S=0,9S=1,0
Szyna 0,190,330,420,500,880,890,920,950,951,0
Podkład drewniany 0,340,600,730,790,860,90,950,960,971,0
Utrzymanie torów jest kluczowym zadaniem, które ma ogromny wpływ na bezpieczeństwo ruchu kolejowego. W tej pracy autorzy opisali wyniki badań weryfikujących możliwość zastosowania sieci FCN-8 do detekcji stałych elementów szlaku kolejowego, tj.: przytwierdzeń drewnianych i betonowych, szyn i rozjazdów kolejowych.
Detekcję tę realizuje się przez segmentację obrazu. Każdemu pikselowi na obrazie przypisuje się etykietę obiektu, do którego on należy. Pozwala to też na określenie stopnia pokrycia podkładu przez podsypkę. Obraz toru rejestrują dwie kamery linijkowe. Każda z kamer obejmuje połowę szerokości obszaru toru i jest podłączona do osobnej wytrenowanej sieci FCN-8. Obraz toru jest przetwarzany równolegle przez dwie sieci FCN-8, z których pierwsza odpowiada za lewą połowę obrazu, a druga za prawą połowę. Dzięki temu obraz pojedynczej ścieżki przetwarza się z szybkością 15 klatek na sekundę. W pracy [15] analizowano obraz toru przepuszczany przez w pełni konwolucyjną sieć neuronową. Wynikiem końcowym jest zgrubna mapa o wymiarze 1/16 obrazu wejściowego.
W zastosowanym tu podejściu, sieć FCN-8 łączy informacje szczegółowe z wcześniejszych warstw z informacjami zgrubnymi z mapy zgrubnej, a wynik jest próbkowany ośmiokrotnie. W rezultacie przewidywany obraz maski ma wymiar obrazu wejściowego zamiast 1/16 obrazu wejściowego [15].
Przetestowaliśmy również odporność naszego systemu na zmiany jasności obrazu. Test wykazał, że wykrywanie elementów przytwierdzeń jest umiarkowanie wrażliwe na zmianę jasności. Spadek poziomu jasności do 0,7 dla elementów złącznych powoduje spadek ich względnej dokładności pikseli do 0,9. Pozostałe elementy torów kolejowych są znacznie mniej wrażliwe na zmianę jasności. Spadek poziomu jasności do 0,3 powoduje spadek względnej dokładności IoU do 0,9.
Prezentowany tu system może wykrywać elementy torów kolejowych z szybkością 15 klatek na sekundę. Stanowi on użyteczną alternatywę szeregu innych istniejących systemów.
Bibliografia
1. Bab enko P., Visual inspection of railroad tracks. PhD thesis, University of Central Florida, 2009.
2. Bojarczak P., Application of wavelet transform into precise localization of railway rail edges in visual diagnostic of
3. Bojarczak P., Visual algorithms for automatic detection of squat flaws in railway rails, “Insight – Non-Destructive Testing and Condition Monitoring”, Vol. 55, No. 7, 2013, 353–359, DOI: 10.1784/insi.2012.55.7.353.
4. Bojarczak P., Lesiak P., Application of neural networks into automatic visual diagnostic of railway wooden sleepers, Międzynarodowa Konferencja Naukowa Transport XXI w., Białowieża 2010, “Logistyka”, Nr 4, 2010.
5. Bojarczak P., Lesiak P., SVM based classification method of railway’s defects, “Pomiary Automatyka Kontrola”, R. 53, Nr 12, 2007, 15–17.
6. Bojarczak P., Lesiak P., Visual system diagnosing the state of elements fastening the rail to the sleepers. “Pomiary Automatyka Kontrola”, R. 57, Nr 12, 2011, 1605–1607.
7. Chen L.C., Papandreou G., Kokkinos I., Murphy K., Yuille A.L., DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs, “Computer Vision and Pattern Recognition”, 2018, DOI: 10.48550/arXiv.1606.00915.
8. Chen L.C., Papandreou G., Kokkinos I., Murphy K., Yuille A.L., Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs, “Computer Vision and Pattern Recognition”, 2014, DOI: 10.48550/arXiv.1412.7062.
9. Chen L.C., Papandreou G., Schroff F., Adam H., Rethinking Atrous Convolution for Semantic Segmentation, “Computer Vision and Pattern Recognition”, 2017, DOI: 10.48550/arXiv.1706.05587.
10. Chen L.C., Papandreou G., Schroff F., Adam H., Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. “Computer Vision and Pattern Recognition”, 2018, DOI: 10.48550/arXiv.1802.02611.
11. Camargo L., Edwards J., Barkan C., Emerging condition monitoring technologies for railway track components and special track work. ASME/ASCE/IEEE Joint Rail Conference, Pueblo, Colorado, 2011, DOI: 10.1115/JRC2011-56113.
12. Dai P., Du X., Wang S., Gu Z., Ma Y., Rail fastener automatic method in complex background. Proceedings of the SPIE, Vol. 10806, 2018, DOI: 10.1117/12.2503323.
13. Dumoulin V., Visin F., A guide to convolution arithmetic for deep learning , “Machine Learning”, 2016, DOI: 10.48550/arXiv.1603.07285.
14. Feng H., Jiang Z., Xie F., Yang P., Shi J., Chen L., Automatic fastener classification and defect detection in visionbased railway inspection systems, “IEEE Transactions on Instrumentation and Measurement”, Vol. 63, No. 4, 2014, 877–888, DOI: 10.1109/TIM.2013.2283741.
15. Gibert X., Patel V.M., Chellappa R., Deep Multitask Learning for Railway Track Inspection, “IEEE Transactions on Intelligent Transportation Systems”, Vol. 18, No. 1, 2017, 153–164, DOI: 10.1109/TITS.2016.2568758.
16. Giben X., Patel V.M., Chellappa R., Material classification and semantic segmentation of railway track images with deep convolutional neural networks. IEEE International Conference on Image Processing, 2015, 621–625, DOI: 10.1109/ICIP.2015.7350873.
17. Gibert X., Patel V.M., Chellappa R., Robust fastener detection for autonomous visual railway track inspection. IEEE Winter Conference on Application of Computer Vision, 2015, 694–701, DOI: 10.1109/WACV.2015.98.
18. He K., Gkioxari G., Dollar P., Girshick R., Mask R-CNN, “Computer Vision and Pattern Recognition”, 2017, DOI: 10.48550/arXiv.1703.06870.
19. Karakose M., Yaman O., Murat K., Akin E., A new approach for condition monitoring and detection of rail components and rail track in railway, “International Journal of Computational Intelligence Systems”, Vol. 11, No. 1, 2018, 830–845, DOI: 10.2991/ijcis.11.1.63.
20. Karakose M., Yaman O., Murat K., Akin E., Real time implementation for fault diagnosis and condition monitoring approach using image processing in railway switches “International Journal of Applied Methods in Electronics and Computers”, 2016, 307–313, DOI: 10.18100/ijamec.270627.
21. Krizhevsky A., Sutskever I., Hinton G.E., ImageNet classification with Deep Convolutional Neural Networks, “Advances in Neural Information Processing Systems”, Vol. 14, 2012, 1097–1105.
22. Kumar B.V.K.V., Mahalanobis A., Juday R., Correlation pattern recognition, Cambridge University Press, 2005.
23. Lesiak P., Mobilna diagnostyka szyn w torze kolejowym. Monografia habilitacyjna, Wydział Transportu Politechniki Warszawskiej, 2008.
24. Lesiak P., Bojarczak P., Application of neural classifier to railway flaw detection in the method of metal magnetic memory, The 6 International Conference “Environmental Engineering” Selected papers, Vol. 2, 744–747, Vilnius, Lithuania, 2005.
25. Lesiak P., Bojarczak P., Application of wavelets and fuzzy sets to detection of head – checking defects in railway rails, “Transport Systems Telematics”, 10 Conference TST 2010, Communications in Computer and Information Science, Springer, Vol. 104, 2010, 327–334, DOI: 10.1007/978-3-642-16472-9_36.
26. Lesiak P., Bojarczak P., Inteligentne algorytmy analizy ultradźwiękowej obrazów w badaniach bezstykowych złączy szyn metodą TOFD, „Logistyka”, 3, 2012.
27. Lesiak P., Bojarczak P., Migdal M., Inteligentne klasyfikatory wad kontaktowo-naprężeniowych w szynach kolejowych „Pomiary Automatyka Komputery w Gospodarce i Ochronie Środowiska”, Nr 3, 2009, 13–17.
28. Li Y., Trinh H., Haas N., Otto C., Pankanti S., Rail component detection, optimization, and assessment for automatic rail track inspection, “IEEE Transactions on Intelligent Transportation Systems”, Vol. 15, No. 2, 2014, 760–770, DOI: 10.1109/TITS.2013.2287155.
29. Liu W., Anguelov D., Erhan D., Szegedy C., Reed S., Fu C.Y., Berg A.C., SSD: Single Shot MultiBox Detector, “Computer Vision and Pattern Recognition”, 2015, DOI: 10.1007/978-3-319-46448-0_2.
30. Long J., Shelhamer E., Darrell T., Fully Convolutional Networks for Semantic Segmentation, “Computer Vision and Pattern Recognition”, 2014, DOI: 10.48550/arXiv.1411.4038.
31. Mazzeo P., Nitti M., Stella E., Distante A., Visual recognition of fastening bolts for railroad maintenance, “Pattern Recognition Letters”, Vol. 25, No. 6, 2004, 669–777, DOI: 10.1016/j.patrec.2004.01.008.
32. Rauschmayr N., Hoechemer M., Zurkirchen M., Kenzelmann S., Gilles M., Deep Learning of Railway Track Faults using GPUs, Global Technology Conference, Santa Clara, USA, 2018.
33. Redmon J., Divvala S., Girshick R., Farhadi A., You Only Look Once: Unified, Real-Time Object Detection, Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, 2016, 779–788, DOI: 10.1109/CVPR.2016.91.
34. Ren S., He K., Girshick R., Sun J., Faster R-CNN: Towards real-time object detection with region proposal networks, “IEEE Transactions on Pattern Recognition and Machine Intelligence”, Vol. 39, 2017, 1137–1149, DOI: 10.1109/TPAMI.2016.2577031.
35. Resendiz E., Hart J., Ahuja N., Automated visual inspection of railroad tracks, “IEEE Transactions on Intelligent Transportation Systems”, Vol. 14, No. 2, 2013, 751–760, DOI: 10.1109/TITS.2012.2236555.
36. Tan C., Sun F., Kong T., Zhang W., Yang C., Liu C., A survey on Deep Transfer Learning, Proceedings of 27th International Conference on Artificial Neural Networks, Rhodes, part 3, Vol. 11141, 2018, 270–279, DOI: 10.1007/978-3-030-01424-7_27.
37. Yang J., Tao W., Liu M., Zhang Y., Zang H., Zhao H., An efficient direction field-based method for the detection of fasteners on high-speed railways, “Sensors”, Vol. 11, No. 8, 2011, 364–7381, DOI: 10.3390/s110807364.
38. Shorten C., Khoshgoftaar T.M., A survey on Image Data Augmentation for Deep Learning. “Journal of Big Data”, Vol. 6, 2019, DOI: 10.1186/s40537-019-0197-0.
Inne źródła
39. https://www.plastwil.pl/systemy-przytwierdzen-szyn-produkty-pl.html, accessed 10 January 2024
Piotr Bojarczak, Waldemar Nowakowski
Automatic Diagnosis of Railway Track Elements Using Deep Learning Neural Networks
Abstract: The article discusses a method for automatic diagnostics of a railway track. It consists in automatic evaluation of the technical condition of selected track elements, such as rails, wooden and concrete sleepers, fasteners and turnouts. It was carried out on the basis of analysis of video images of railroad track elements recorded by two line cameras placed on the diagnostic carriage. The selected FCN-8 deep learning neural network was used to assess the technical condition of the surveyed elements, and the effectiveness of the applied algorithm was determined on the basis of such measures as IoU, Precision, Recall. Conclusions on the application of the FCN-8 network in the automatic classification of features of selected railroad track elements are presented. The results obtained were compared with other methods used in vision diagnostics.
Absolwent Wydziału Transportu Wyższej Szkoły Inżynierskiej w Radomiu, gdzie w 1990 r. uzyskał tytuł magistra inżyniera transportu. Stopień doktora nauk technicznych w dyscyplinie elektrotechnika uzyskał w 1995 r. na Wydziale Elektrycznym Politechniki Warszawskiej, natomiast stopień doktora habilitowanego w dyscyplinie transport uzyskał w 2014 r. na Wydziale Transportu i Elektrotechniki Uniwersytetu Technologiczno-Humanistycznego w Radomiu. Obecnie pracuje w Katedrze Systemów Sterowania i Elektroniki na Wydziale Transportu, Elektrotechniki i Informatyki Uniwersytetu Radomskiego. Jego obszar zainteresowań naukowych obejmuje zagadnienia związane z zastosowaniem algorytmów uczących w szeroko rozumianej diagnostyce kolejowej.
dr hab. inż. Waldemar Nowakowski, prof. URad w.nowakowski@uthrad.pl
ORCID: 0000-0003-0592-9065
Absolwent Wydziału Transportu Wyższej Szkoły Inżynierskiej w Radomiu. W 1988 r. uzyskał tytuł magistra inżyniera transportu, w 2009 r. stopień doktora nauk technicznych, a w 2018 r. stopień doktora habilitowanego w dyscyplinie transport. Obecnie pracuje w Katedrze Systemów Sterowania i Elektroniki na Wydziale Transportu, Elektrotechniki i Informatyki Uniwersytetu Radomskiego. Jego obszar zainteresowań naukowych obejmuje zagadnienia związane z automatyką kolejową, bezpieczeństwem i niezawodnością systemów w transporcie kolejowym, diagnostyką systemów sterowania ruchem kolejowym oraz automatyką przemysłową.
Analiza pełzania w przetwornikach momentu siły dla turbin wiatrowych
Jacek Grzegorz Puchalski, Janusz Daniel Fidelus, Paweł Fotowicz
Instytut Optoelektroniki, Wojskowa Akademia Techniczna, ul. gen. Sylwestra Kaliskiego 2, 00-908 Warszawa
Streszczenie: Kluczową kwestią przy analizie efektywności turbin wiatrowych jest zjawisko pełzania momentu siły zarówno pod obciążeniem, jak i bez obciążenia. Zjawisko to ma istotny wpływ na poprawne działanie przetworników momentu siły, dlatego wymaga zastosowania odpowiednich algorytmów do analizy danych pomiarowych. Metoda najmniejszych kwadratów jest odpowiednia do takiej analizy. Zastosowano regresję liniową do zbadania samego trendu pełzania, a nieliniowa krzywa wielomianowa trzeciego stopnia pozwoliła na jego wizualizację.
Słowa kluczowe: analiza danych, badanie pełzania, przetwornik momentu siły, metoda najmniejszych kwadratów, regresja, niepewność pomiaru
1. Wprowadzenie
Wydajność i efektywność działania turbin wiatrowych jest przedmiotem zainteresowania ich producentów. Sektor energii odnawialnej nieustannie się rozwija i stanowi już znaczący udział w produkcji energii elektrycznej. Dlatego zagadnienia związane z zachowaniem przetworników momentu siły turbin nabierają istotnego znaczenia. Jednym z takich zagadnień jest zjawisko pełzania występujące w tych przetwornikach [1]. Zjawisko to ma istotny wpływ na zachowanie się turbin w trakcie ich eksploatacji.
W przypadku przetworników momentu siły pełzanie może wpływać na ich dokładność. W związku z tym należy przeprowadzać kalibrację tych przetworników [2].Badania wykazały, że największe wskazania przetworników siły w pierwszych sekundach pomiaru wynikają najprawdopodobniej z właściwości mechanicznych materiałów, z których są zbudowane [3, 4].
Ze względu na sprężystość elementów przetwornika w sygnale wyjściowym występują niewielkie zmiany przy stałej sile spowodowane pełzaniem. Efekt ten jest istotny nie tylko przy pomiarach długoterminowych, gdzie bardzo ważna jest niska wartość pełzania, ale także przy pomiarach krótkoterminowych. Na błąd spowodowany pełzaniem może mieć wpływ m.in. konstrukcja przetwornika i elementy, z jakich jest zbudowany, zastosowany przewód elektryczny przetwornika, miernik pomiarowy, oś pomiarowa oraz konstrukcja samego stanowiska badawczego.
2. Przyczyny pełzania
Podstawowy wpływ na zjawiska pełzania przetworników momentu siły ma temperatura, obciążenie i czynniki środowiskowe [5–7].
Zmiany temperatury znacząco wpływają na dokładność przetworników momentu siły. Wysokie temperatury mogą prowadzić do rozszerzalności cieplnej, powodując deformację materiałów i wprowadzając błędy pomiarowe. Natomiast niskie temperatury mogą wpływać na lepkość smarów stosowanych w przetwornikach, powodując zmiany sił tarcia, a w konsekwencji oddziałując na ich zachowanie podczas pełzania.
Wielkość i czas trwania przyłożonego obciążenia bezpośrednio wpływają na charakterystykę pełzania przetworników momentu siły. Wysokie obciążenia mogą powodować odkształcenia elementów czujnikowych przetwornika i zmieniać ich właściwości sprężyste, co prowadzi do zwiększonego prawdopodobieństwa pełzania. Natomiast długi czas trwania stałego obciążenia może wywołać odkształcenie plastyczne przetwornika, powodując trwałe zmiany w jego działaniu.
Warunki środowiskowe, takie jak wilgotność i narażenie na kurz, mogą również wpływać na zachowanie przetworników momentu siły. Absorpcja wilgoci wpływa na właściwości mechaniczne materiałów przetwornika, prowadząc do zmian szybkości samego pełzania. Dodatkowo na powierzchni przetwornika może gromadzić się kurz lub zanieczyszczenia, co też ma wpływ na analizowane zjawisko.
Zrozumienie kluczowych czynników wpływających na pełzanie przetwornika momentu siły jest niezbędne dla zapewnienia dokładnych i niezawodnych pomiarów.
Autor korespondujący:
Janusz D. Fidelus, janusz.fidelus@gum.gov.pl
Artykuł recenzowany nadesłany 25.03.2024 r., przyjęty do druku 26.06.2024 r.
Zezwala się na korzystanie z artykułu na warunkach
3.0
3. Badanie pełzania
Badania pełzania wykonywano w temperaturze otoczenia dla przetwornika momentu siły o wartości nominalnej 2 kN · m w kierunku zgodnym i przeciwnym do ruchu wskazówek zegara, zgodnie z normą ISO 376:2011. Przetwornik HBK 2 kN · m,
na którym przeprowadzono badania, przedstawiono na rys. 1. Cechą szczególną tego przetwornika jest nie tylko jego mechaniczne podobieństwo do przetwornika 5 MN m [8], ale również dodatkowe mostki do pomiaru siły osiowej F z oraz momentów zginających M x i M y Badania pełzania przeprowadzono dla 8 punktów pomiarowych w zakresie od 200 N · m do 2 000 N · m. W każdym punkcie
Tab. 1. Zmierzone wartości sygnału z przetwornika dla dwóch poziomów pomiarowych
Tab. 1. Measured signal values from the transmitter for two measurement levels
Rys.1. Przetwornik HBK 2 kN m przeznaczony do pomiaru momentu siły w obu kierunkach
Fig. 1. The HBK torque transducer 2 kN m designed to measure clockwise and anti-clockwise torque
sygnał mierzony obserwowano przez 33 sekundy od 20. sekundy po obciążeniu. Dodatkowo w każdym punkcie pomiarowym badano zachowanie sygnału bez obciążenia w tym samym przedziale czasu, począwszy od 70. sekundy. Wskazanie przetwornika momentu siły podawane jest w jednostkach elektrycznych (mV/V). 16 odczytów reprezentuje pełzanie w każdym punkcie pomiarowym (tab. 1 i rys. 2).
1,046 705 970,000 158
1,046 722 990,000 161 51 1,046 6181010,000 158
53 1,046 6791030,000 139
Przedmiotem badań jest odzwierciedlenie pełnej charakterystyki czasowej sygnału z przetwornika momentu siły na podstawie wszystkich dostępnych danych pomiarowych i znalezienie zależności sygnału w funkcji czasu. Analiza pełzania opiera się na metodzie najmniejszych kwadratów z wykorzystaniem regresji wielomianowej i liniowej, przy czym na ogół funkcja nieliniowa jest dopasowywana do poszczególnych punktów pomiarowych. W tym celu wykorzystano zarówno funkcję liniową o dwóch parametrach, które reprezentują kierunek pełzania w każdym punkcie pomiarowym, jak i funkcję wielomianową trzeciego stopnia o trzech i czterech parametrach. Funkcje wielomianowe trzeciego stopnia, dzięki występowaniu punktów siodłowych, uwzględniają nieliniowe efekty zależności sygnału od czasu. Dla punktów pomiarowych pod obciążeniem w większości przypad-
Rys. 2. Pomiar momentu siły w wybranych momentach czasu od poziomu 2 kN m do zera: lewa strona z serią szesnastu punktów sygnału (górna część) dla momentu siły 2 kN · m oraz prawa strona z serią szesnastu punktów sygnału dla zerowego momentu siły (dolna część); kropki reprezentują dane pomiarowe
Fig. 2. The measurement of torque at selective points in time from a level of 2 kN m to zero: the left side with the series of sixteen points of signal (upper part) for 2 kN m of torque and the right side with the series of sixteen points of signal for zero torque (lower part); the dots represents the measurement data
Jacek Grzegorz Puchalski, Janusz Daniel Fidelus, Paweł Fotowicz
ków jest to tendencja rosnąca, natomiast dla punktów pomiarowych bez obciążenia nie można wyróżnić wyraźnego trendu. Dalsza analiza linii najlepszego dopasowania na rysunku wskazuje, że rozrzut danych wokół tej linii nie jest losowy, lecz wykazuje wyraźną tendencję. W celu dobrania parametrów danej funkcji nieliniowej niezbędne są zmierzone wartości w punktach pomiarowych i oszacowane dla nich niepewności. Złożoną niepewność standardową związaną z pojedynczym punktem pomiarowym wyznacza się przy użyciu ośmiu składowych równania: 8 22 1 ci i uu = ∑ (1)
gdzie: u1– niepewność standardowa wyników kalibracji przetworników odniesienia, gdy stosowane są funkcje stopnia trzeciego; u2 – niepewność standardowa wynikająca z krótkotrwałego pełzania przetworników odniesienia; u3 – niepewność standardowa związana z długotrwałym dryftem przetworników odniesienia; u4 – niepewność standardowa wynikająca z niewspółosiowości kalibrowanego urządzenia; u5 – niepewność standardowa związana ze stabilnością urządzenia wskazującego; u6 – niepewność standardowa związana z używaniem przetworników odniesienia w podzakresach; u7 – niepewność standardowa wynikająca ze stabilności przenoszenia momentu siły na wale; u8 – niepewność standardowa wynikająca z wpływu zmian temperatury na przetworniki odniesienia.
Na podstawie oszacowanych wartości względnych poszczególnych niepewności standardowych [2], można zestawić budżet niepewności (tab. 2).
Względną niepewność rozszerzoną dla prawdopodobieństwa 95 % można wyznaczyć mnożąc współczynnik rozszerzenia przez złożoną niepewność standardową:
44 1,931,79103,5100,035% c Uku=⋅=⋅×=×=
Przy wyznaczaniu wartości współczynnika rozszerzenia (k = 1,93) zastosowano metodę przedstawioną w publikacji [9]. Punkty pomiarowe w kolejnych momentach czasu nie wskazują tej samej wartości sygnału z przetwornika. Jest to zależność czasowa y = f(t), która odzwierciedla pomiar będący w całości procesem stochastycznym, dlatego też zastosowanie metod standardowych będzie niewystarczające do określenia średniej wartości mierzonego poziomu. Na przykład, aby określić wartość niepewności pomiaru sygnału zależnego od czasu, odchylenie jest często nazywane odchyleniem Allana lub pierwiastkiem kwadra-
Tab.2. Budżet niepewności przetwornika momentu siły
Tab.2. Uncertainty budget of torque transducer
Składowa niepewności Rozkład prawdopodobieństwa
Względna wartość niepewności standardowej
u1 normalny 3 × 10–5
u
u
u
u5 normalny
sygnał czas sygnał
(a)
× 10–5
× 10–4
× 10–6
× 10–5
u6 normalny 1 × 10–4
u
u
u c płasko-normalny
× 10–5
× 10–5
× 10–4
(b)
Rys. 3. Mierzony sygnał z zaznaczonym korytarzem niepewności rozszerzonej w funkcji czasu w wybranym punkcie pomiarowym danego momentu siły: (a) rzeczywista ciągła zmienna zależność mierzonego sygnału w funkcji czasu wraz ze zmiennym w czasie korytarzem niepewności, (b) równoważny model uśrednionej wartości mierzonego sygnału przy stałej szerokości korytarza niepewności
Fig. 3. The measured signal with the expanded uncertainty corridor as a function of time at the selected measurement point of a given torque: (a) a really continuous variable dependence of the measured signal as a function of time along with a time-varying uncertainty corridor, (b) an equivalent model of the averaged value of the measured signal with a constant uncertainty corridor width
towym wariancji Allana [10], którego nie stosuje się w systemach stacjonarnych, gdzie zależność od czasu nie jest już istotna. W tym przypadku założenie o stacjonarności procesu pomiaru sygnału jest nieuzasadnione. W celu określenia charakterystyki przetwornika momentu siły należy wyznaczyć średni poziom sygnału y z przetwornika mierzonego w zadanych odstępach czasu. Sygnał ten podlega dryftowi, zmieniając swoją wartość w każdym próbkowanym momencie. Na rys. 3a przedstawiono przykładową zależność sygnału w funkcji czasu y(t), z uwzględnieniem niepewności korytarza rozszerzenia, która jest także w ogólności funkcją czasu U(t). Aby jednak wyznaczyć charakterystykę, należy wyznaczyć średnią wartość sygnału y oraz stałą szerokość korytarza niepewności sygnału U, które nie zmieniają się w żadnym z zadanych punktów pomiaru momentu siły (rys. 3b).
4. Model analityczny
Liniowe lub nieliniowe funkcje czasu są opisywane przez rozwinięcie wielomianowe szeregu Taylora y = f(t,c) = c0 +c1t + c2t2 + ... + c m tm
i wektor parametrów dopasowania c = [c0,c1, c2, …, c m]T. Oznacza to, że do wyznaczenia wektora dopasowania wymaganych jest m równań nieliniowych [11–16]. Rozwinięcie to reprezentuje także zastosowanie wielu złożonych funkcji elementarnych opisujących dany proces fizyczny. W naszym przypadku jest to proces rozciągnięty w czasie pełzania mierzonej wielkości fizycznej, w tym przypadku momentu siły, wynikający z bezwładności procesów zachodzących podczas pomiaru na stanowisku pomiarowym.
Podstawowym narzędziem stosowanym w celu dopasowania nieliniowej zależności do punktów pomiarowych jest metoda najmniejszych kwadratów. W ogólnym podejściu jest to metoda WTLS (ang. Weighted Total Least Square) uwzględniająca wszystkie na ogół różniące się niepewności współrzędnych punktów oraz występujące także różne korelacje między współrzędnymi punktów pomiarowych [17]. W rozważanym przypadku zależności czasowej takie korelacje, np. między kolejnymi pomiarami czasu, są reprezentowane przez macierz kowariancji Ut, a korelacje mierzonego sygnału przez macierz kowariancji UY
Z kolei korelacje krzyżowe między pomiarami czasu i sygnału są reprezentowane w macierzy UtY, z których najsilniejsze występują w badanym punkcie pomiarowym, między praktycznie jednocześnie mierzonymi współrzędnymi czasu i użytecznego sygnału z przetwornika.
Parametry tego rozwinięcia są wyznaczane z równania wektorowego dla metody najmniejszych kwadratów, uwzględniających zarówno współrzędne zmierzonych punktów pomiarowych, ale i niepewności sygnału oraz czasu, a także wszystkie możliwe korelacje między nimi związane z warunkami środowiskowymi i właściwościami stanowiska pomiarowego.
Ogólny warunek optymalizacyjny sprowadza się do maksymalizacji funkcji największej wiarygodności, co oznacza minimalizację bezwymiarowej funkcji kryterialnej o najbardziej ogólnym równaniu dla metody WTLS:
prowadzi, w wyniku zerowania pierwszych pochodnych cząstkowych po parametrach a, b dla prostej i parametrach ai, bj dla krzywych trzeciego stopnia, do rozwiązań analitycznych: – dla prostej y = at +b:
gdzie:
gdzie Ut, UY, UtY są macierzami kowariancji dla zmiennej czasu t i sygnału y mierzonego w n punktach, uwzględniających autokorelacje, oraz macierzy kowariancyjnej, uwzgledniającej efekty korelacji między współrzędnymi czasu i sygnału. Natomiast Δt, ΔY oznaczają wektory odchyleń zawierające wartości odchyleń dla czasu Δt1, …, Δt n i dla sygnału Δy1 = f(t1 + Δt1, c) – f(t1, c), …, Δyn = f(tn + Δt n, c) – f(t n, c) w kolejnych punktach pomiarowych t1, …, t n. W szczególnym przypadku braku korelacji otrzymuje się zależność minimum funkcji kryterialnej (2): () () () 22 1 22 , min n ii i ii ty utuy
i t S uy = = ∑ (6b)
2 1 , n i tt i i t S uy =
tY (3)
gdzie u2(ti), u2(yi) są wariancjami (kwadratami niepewności) dla odchyleń czasu Δti i sygnału Δyi. Najczęściej stosowaną metodą najmniejszych kwadratów jest metoda OLS (ang. Ordinary Least Square), szczególny przypadek metody TLS (ang. Total Least Square), bez uwzględnienia niepewności zmiennej odciętej w tym przypadku czasu u(t) = 0, przy założeniu, że wszystkie niep ewności sygnału są jednakowe u2(yi) = const. W szczególnym przypadku, tj. gdyu2(ti) → 0,a wartości ti są dokładne, warunek (3) redukuje się do postaci: () 2 1 2 min n i i i y uy = ∆ → ∑ (4)
O ile warunek (4) prowadzi do rozwiązań analitycznych dla dowolnej funkcji nieliniowej za pomocą metody wyznaczników, o tyle znalezienie warunku minimalizacji ujętego w równaniu (3), czy najbardziej ogólnym równaniu (2), wymaga zastosowania metod numerycznych [17, 18].
Istnieje jednak metoda przybliżona, która zostanie zaprezentowana w poniższej pracy, bazująca na algorytmie rozwiązania numerycznego dopasowania do linii prostej. Algorytm ten umożliwi dopasowanie funkcji nieliniowej zadanej w postaci dwóch wielomianów 3-stopnia w postaci opisanej zależnością y = a3t3 + a2t2 + a1t + a0, y = b3t3 + b1t + b0, oraz funkcją liniową y = at + b stanowiącą dla powyższych zależności linię trendu. Parametry ak (k = 0,…, 3), bl (l = 0, 1, 3) oraz a i b będą wyznaczone zaproponowaną metodą z wykorzystaniem odpowiedniego algorytmu numerycznego.
5. Rozwiązanie analityczne
Stosując metodę najmniejszych kwadratów równanie optymalizacyjne dla minimalizacji kwadratów odległości w kierunku OY dla zestawu n punktów pomiarowych o współrzędnych (ti, yi) (2a)
(6c)
2 1 , n i y i i y S uy = ∑ (6d)
2 1 , n ii ty i i ty S uy = = ∑ (6e) – dla krzywej trzeciego stopnia, opisanej przez y = a3t3 + a2t2 + a1t + a0, przez zerowe pochodne dla parametrów ai, gdzie k = 0, 1, 2, 3: ( ) () 32 3210 2 1 0 k n i iiii i i t yatatata uy −−−−= ∑ (7)
otrzymuje się układ czterech równań liniowych rozwiązywalny metodą wyznaczników: 3 6543 3 2 5432 2 1 4321 1 0 321 0 ty tttt ty tttt ty tttt ty ttt S a SSSS S a SSSS S a SSSS S a SSSn
gdzie: – dla krzywej trzeciego stopnia, opisanej przez y = b
t
+ b1t + b0 przez zerowe pochodne dla parametrów bl, gdzie l = 0, 1, 3:
otrzymuje się układ trzech równań liniowych rozwiązywalny metodą wyznaczników:
gdzie:
6. Rozwiązania
przybliżone z uwzględnieniem macierzy kowariancji
Okazuje się, że w przypadku występowania na ogół różnych niepewności dla zmiennej czasu ti i mierzonego sygnału yi oraz korelacji opisywanych przez macierz kowariancji
T1 , P = 11 YeffU T1 , tt P = Yeff tUt T1T1 , t P ==11 YeffYeff tUUt
T1T1 , y P ==11 YeffYeff YUUY T1 , yy P = Yeff YUY
T1T1 ty P == YeffYeff tUYYUt
i efektywna macierz odwrócona:
zależność nieliniowa y = f(t) może być przedstawiona w postaci zależności liniowej y = θ1ξ(t, β) + θ0, gdzie funkcja ξ(t, β) jest funkcją transformującą, a θ1, θ0 oraz w ogólności wektor β są parametrami, które wynikają z dopasowania funkcji i minimalizacji funkcji kryterialnej, która w przybliżeniu transformuje się do postaci:
gdzie
T2 1 121 , =+++θθ 11 12 22 VUUUU a macierze U11, U12, U22 są częściami macierzy odwrotnej
i są funkcjami wyłącznie jednego parametru θ1 lub θ0 (funkcje te mają quasi wierzchołki). Wyznaczając dla serii punktów w przyjętym badanym przedziale θ1L < θ1H dla wybranych wartości parametrów wektora β wartości minimum lokalnego, a następnie poszukując wartości wektora β (najłatwiej jednowymiarowego) można dokonać minimalizacji funkcji kryterialnej otrzymując globalne minimum w punkcie θ1min i βmin
7. Algorytm metody WTLS
Algorytm metody składa się z czterech kroków postępowania, przedstawionych poniżej.
1. Dla danej funkcji dopasowującej, np. y = a3t3 + a2t2 + a1t + a0, tworzymy funkcję ξ(t, β) – w tym przypadku ξ(t,[β1, β2]) = t3 + β1t2 + β2t, gdzie β1 = a2/a3 i β2 = a1/a3, zadając początkowe wartości β1 i β2, które przyjmujemy z ustalonymi krokami hβ1 i hβ2, z przedziałów 111 LH βββ ≤≤ i 222 LHβββ ≤≤
i diagonalna macierz L jest określona przez pierwsze n elementów jako pochodne funkcji () , t ξ′ β w kolejnych punktach pomiarowych, a następne n identycznych wartości diagonalnych jest równych wartości jeden. W równaniu (10) skorzystano z prawa propagacji błędów i niepewności z wykorzystaniem pierwszej pochodnej funkcji transformującej:
2. Na bazie zadanej macierzy kowariancji U wyznaczamy macierz LUL, gdzie n pierwszych diagonalnych elementów macierzy L jest określonych przez ξ’(t, β) = 3t2 + 2β1t + β2
3. Na zakończenie wyznaczamy w serii punktów θ1i, określających wartości parametru θ1 z krokiem hθ1, z wybranego przedziału 111 LiH θθθ ≤≤ () ( ) 111 1,, /, HL iMhθ θθ ==− charakterystykę () 1 ψξ φθ i wynikającą z niej charakterystykę () 0 , ψξ φθ przy czym punkty θ1i powinny być tak dobrane, aby uwidaczniały quasi minimum (quasi wierzchołek).
Z [19] wynika, że zależności
dla wybranego wektora parametrów β są quasi kwadratowe i opisane przez:
(13)
4. Powtarzamy kolejno powyższe kroki (dopasowując najpierw parametr β1, a następnie β2 lub odwrotnie), aż do otrzymania globalnego minimum funkcji kryterialnej min φψξ dla dopasowanych parametrów 31min , a θ = 21min1min , a θβ = 11min2mina θβ = i 00mina θ = W przypadku funkcji dopasowującej y = b3t3 + b1t + b0, funkcja ξ(t,β) ma postać ξ(t,β1) = t3 + β1t. Wówczas wartości dopasowanych parametrów, ze względu na występowanie wyłącznie jednego parametru β1, wynoszą odpowiednio:
Fig. 5. The quasi-parabolic characteristic ϕψξ(θ1)
8. Wyniki dopasowania linią prostą (linią trendu)
Dopasowanie zrealizowano z uwzględnieniem wyłącznie stałych wartości niepewności u(yi) = 0,0001 mV/V w równaniu (4) i otrzymano następujące zależności czasowe tego dopasowania metodą OLS:
1. dla niskiego p oziomu sygnału:
y = –9,0021 × 10–6t + 0,001024497 z wartością funkcji kryterialnej 3,36, ytφ = 2. dla wysokiego p oziomu:
y = 1,00627 × 10–5t + 1,0463246 z wartością funkcji kryterialnej 141,78. ytφ =
Dla przybliżonego dopasowania z niepewnościami u(ti) = 0,3 s, u(yi) = 0,0001 mV/V:
1. dla niskiego poziomu:
y = –8,09 × 10–6t + 0,001016 z wartością funkcji kryterialnej 3,36, ytφ = 2. dla wysokiego poziomu:
y = 1,0062 × 10–5t + 1,046325 z wartością funkcji kryterialnej 141,66. ytφ =
9. Wyniki dopasowania krzywymi trzeciego stopnia
Dopasowania funkcji trzeciego stopnia zrealizowano z uwzględnieniem stałych wartości niepewności u(yi) = 0,0001 mV/V w równaniu (4). Otrzymano zależności czasowe dopasowania metodami OLS i WTLS, które przedstawiono graficznie na
Rys. 6. Dopasowanie prostej do punktów pomiarowych dla niskiego poziomu sygnału
Fig. 6. Fit of a straight line to the measurement points for the low signal level
Rys. 7. Dopasowanie prostej do punktów pomiarowych dla wysokiego poziomu sygnału
Fig. 7. Fit of a straight line to the measurement points for the high signal level
rys. 8–11 (linia ciągła obrazuje dopasowanie metodą WTLS, a linia kreskowa dopasowanie metodą OLS).
Dla przybliżonego dopasowania z niepewnościami u(ti) = 0,3 s, u(yi) = 0,0001 mV/V otrzymano następujące parametry dla y = b3t3 + b1t + b0 1. dla niskiego p oziomu sygnału
b3 = –5,0204 × 10–10, b1 = 2,5353 × 10–6, b0 = 3,633 × 10–4 Funkcja kryterialna dla niskiego poziomu sygnału wynosi 4,9 φψξ ≈ (rys. 8).
2. dla wysokiego p oziomu:
b3 = –2,9100 × 10–8, b1 = 1,3983 × 10–4, b0 = 1,0433. Funkcja kryterialna dla wysokiego poziomu sygnału wynosi 75,7 φψξ ≈ (rys. 9).
707580859095100 t (s) �� (mV/V)
Rys. 8. Dopasowanie funkcją y = b 3t3 + b1t + b 0 dla niskiego poziomu sygnału
Fig. 8. Fitted tertiary curve y = b 3 t3 + b1t + b 0 for low signal level
Rys. 9. Dopasowanie funkcją y = b 3t
+
t + b 0 dla wysokiego poziomu sygnału
Fig. 9. Fitted tertiary curve y =
Rys. 10. Dopasowanie y = a 3t3 + a 2t2 + a1t + a 0 dla niskiego poziomu sygnału
Fig. 10. Fitted tertiary curve y = a
Otrzymano następujące parametry dla funkcji
y = a3t3 + a2t2 + a1t + a0
1. dla niskiego p oziomu sygnału – dopasowana WTLS:
a3 = –9,2204 × 10–10, a2 = 5,2003 × 10–7,
a1 = –7,8788 × 10–8, a0 = 3,7416 × 10–3. Funkcja kryterialna dla niskiego poziomu sygnału wynosi
1,55 φψξ ≈ (rys. 10).
2. dla wysokiego poziomu sygnału – WTLS: a3 = 1,7950 × 10–7, a2 = –2,2258 × 10–xx, a1 = 8,8906 × 10–4, a0 = 1,0354. Funkcja kryterialna dla wysokiego poziomu sygnału wynosi 26,13 φψξ ≈ (rys. 11).
Dodatkowo, opisane dopasowania funkcji zostały przeprowadzone na podstawie analizy 15 punktów pomiarowych, z wyłączeniem pierwszego, który charakteryzował się istotnie odmienną wartością w porównaniu do pozostałych punktów. Został on zaklasyfikowany jako punkt odstający.
10.
Wyniki dopasowania
linią prostą (linią trendu) dla 15 punktów
Dopasowanie zrealizowano z uwzględnieniem wyłącznie stałych wartości niepewności u(yi) = 0,0001 mV/V w równaniu (4) i otrzymano następujące zależności czasowe tego dopasowania metodą OLS:
1. dla niskiego p oziomu sygnału: y = –8,00 × 10–6t + 0,000932 z wartością funkcji kryterialnej 3,00, ytφ =
Rys. 11. Dopasowanie y = a 3t3 + a
dla wysokiego poziomu sygnału
Fig. 11. Fitted tertiary curve y
signal level
Rys. 12. Dopasowanie prostej do punktów pomiarowych dla niskiego poziomu sygnału
Fig. 12. Fit of a straight line to the measurement points for the low signal level
2. dla wysokiego poziomu: y = –8,00 × 10–6t + 1,0471 z wartością funkcji kryterialnej 8,71. ytφ = Dla przybliżonego dopasowania z niepewnościami u(ti) = 0,3 s, u(y) = 0,0001 mV/V:
1. dla niskiego p oziomu: y = –8,00 × 10–6t + 0,000932 z wartością funkcji kryterialnej 3,00 ytφ = (rys. 12) 2. dla wysokiego poziomu: y = –8,00 × 10–6t + 1,0471 z wartością funkcji kryterialnej 8,72 ytφ = (rys. 13) 0,00000
(mV/V)
Rys. 13. Dopasowanie prostej do punktów pomiarowych dla wysokiego poziomu sygnału
Fig. 13. Fit of a straight line to the measurement points for the high signal level
Zarówno metoda OLS (niewidoczne na rysunkach 12 i 13 czerwone linie przerywane), jak i metoda WTLS (linie proste na rysunkach 12 i 13) dają te same wyniki.
11. Wyniki dopasowania krzywymi trzeciego stopnia dla 15 punktów
Dopasowania funkcji trzeciego stopnia zrealizowano z uwzględnieniem stałych wartości niepewności u(yi) = 0,0001 mV/V w równaniu (4). Otrzymano zależności czasowe dopasowania metodami OLS i WTLS, które przedstawiono graficznie na rys. 14–17 (linia ciągła obrazuje dopasowanie metodą WTLS, a linia kreskowa dopasowanie metodą OLS).
Dla przybliżonego dopasowania z niepewnościami u(ti) = 0,3 s, u(yi) = 0,0001 mV/V otrzymano następujące parametry dla funkcji y = b3t3 + b1t + b0
Funkcja kryterialna dla wysokiego poziomu sygnału wynosi 9,17
≈ (rys. 17).
12. Podsumowanie
Przeprowadzona analiza zjawiska pełzania występującego w przetworniku momentu siły opiera się na metodzie najmniejszych kwadratów z wykorzystaniem regresji wielomianowej i liniowej. W tym celu wykorzystano zarówno funkcję liniową o dwóch parametrach, która reprezentuje kierunek pełzania w każdym punkcie pomiarowym, jak i funkcję wielomianową trzeciego stopnia o trzech i czterech parametrach. Funkcje wielomianowe trzeciego stopnia, dzięki posiadaniu punktów siodłowych, uwzględniają nieliniowe efekty zależności sygnału od czasu. Dla punktów pomiarowych pod obciążeniem w większości przypadków jest to tendencja rosnąca, natomiast dla punktów pomiarowych bez obciążenia nie można wyróżnić wyraźnego trendu. Dalsza analiza linii najlepszego dopasowania wskazuje, że rozrzut danych wokół tej linii nie jest losowy, lecz wykazuje wyraźną tendencję. Zwiększenie precyzji dopasowania do 15 punktów pomiarowych (charakteryzujące się niższymi wartościami funkcji kryterialnej) uzyskuje się poprzez zastosowanie pierwszego splajnu. Natomiast, w przypadku potrzeby dopasowania do 16 punktów pomiarowych, w tym jednego znacząco odstającego, bardziej odpowiednim wyborem jest drugi splajn.
1,61
≈ (rys. 16).
Rys. 14. Dopasowanie funkcją y = b 3t3 + b1t + b 0 dla niskiego poziomu sygnału
Fig. 14. Fitted tertiary curve y = b 3 t3 +
Przy doborze parametrów dla określonej funkcji regresji niezbędne są zmierzone wartości punktów pomiarowych i oszacowana niepewność. Złożoną niepewność standardową związaną
(s) �� (mV/V)
Rys. 16. Dopasowanie funkcją y =
niskiego poziomu sygnału
Fig. 16. Fitted tertiary curve
Rys. 15. Dopasowanie funkcją y =
dla wysokiego poziomu sygnału
Fig. 15. Fitted tertiary curve
(s)
17. Dopasowanie funkcją y
wysokiego poziomu sygnału
Fig. 17. Fitted tertiary curve
Rys.
z pojedynczym punktem pomiarowym wyznacza się na podstawie ośmiu składowych jej równania. Ze względu na podobieństwo mechaniczne badanego przetwornika momentu siły 2 kN·m do przetwornika momentu siły 5 MN·m, zaproponowane algorytmy mogą być przydatne do optymalizacji sygnału pełzania i jego niepewności dla przetworników podobnych mechanicznie. Przetworniki momentu siły są istotnymi elementami w zastosowaniach związanych z energią wiatrową, ułatwiając precyzyjny pomiar i kontrolę momentu siły w turbinach wiatrowych. Czułość, wartość nominalna, dokładność, niezawodność, trwałość i czas reakcji to kluczowe parametry przetwornika. Przy ocenie przydatności przetwornika momentu siły do zastosowań dynamicznych lub przy zadaniach wymagających dużej precyzji, np. w sektorze energetyki wiatrowej, muszą być znane właściwości zjawiska pełzania. Informacje te można wykorzystać do optymalizacji wydajności turbiny wiatrowej poprzez regulację jej działania, uzależnioną od zmieniających się warunków wietrznych.
Zastosowane algorytmy są istotnymi narzędziami stosowanymi do analizy i interpretacji uzyskanych danych z przetworników momentu siły lub przetworników momentu obrotowego. Algorytmy te umożliwiają identyfikację i określenie ilościowe zjawiska pełzania, które może mieć znaczący wpływ na dokładność i wiarygodność pomiarów momentu siły. Dzięki zastosowaniu zaawansowanych algorytmów możliwa jest analiza danych pomiarowych uzyskanych z przetworników w celu skorygowania efektów pełzania. Algorytmy te umożliwiają oszacowanie rzeczywistych wartości momentu siły przez kompensację błędów wywołanych pełzaniem, zwiększając w ten sposób dokładność i niezawodność pomiaru tego momentu. Artykuł zawiera obszerne informacje przedstawione w publikacji autorów, przywołanej na ostatniej pozycji listy bibliograficznej [20].
Podziękowania
Autorzy dziękują p. Kamilowi Cybulowi za pomoc w badaniach przetwornika momentu siły. Praca częściowo była wykonana w ramach projektu EMPIR JRC 19ENG08 „Traceable mechanical and electrical power measurement for efficiency determination of wind turbines” WindEFCY, w latach 2020–2023.
Bibliografia
1. BrugeA., Creep measurements in reference torque calibration machines. Proceedings of the IMEKO 2010: TC3, TC5 and TC22 Conferences, Pattaya, Thailand, 22–25 November 2010.
2. Woźniak M., Röske D., Investigation of the calibration and measurement capabilities of the new 5 kN m torque calibration machine at GUM. Proceedings of the XXI IMEKO World Congress, Measurement in Research and Industry, Prague, Czech Republic, 30 August–4 September 2015.
3. Fidelus J., Cybul K., Study on short-term creep effect and hysteresis for the HMB Z4A force transducer under compressive andtensile forces, “Acta IMECO”, Vol. 9, No. 5, 2020, 137–142, DOI: 10.21014/acta_imeko.v9i5.956.
4. Fidelus J., Puchalski J.,Trych-Wildner A., Weidinger P., The creep behavior of a 2 kN m torque transducer tested at GUM and PTB. Proceedings of the 2023 14th International Conference on Measurement, Smolenice, Slovakia, 29–31 May 2023, DOI: 10.23919/MEASUREMENT59122.2023.10164420.
5. Martinez M., Reigosa D., Fernandez D., Briz F., Comparative Analysis of High Frequency Signal Injection Based Torque Estimation Methods for SPMSM, IPMSM and SynRM. “Energies”, Vol. 13, No. 3, 2020, DOI: 10.3390/en13030592.
6. Khaled K.M., Roske D., Abuelezz A.E., El-Sherbiny M.G., The influence of temperature and humidity on the sensitivity of torque transducers. “Measurement”, Vol. 94, 2016, 186–200, DOI: 10.1016/j.measurement.2016.07.028.
7. Sander J.,Kumme R., Tegtmeier F.L.,Creep Correction Method for Force Applications, IMEKO 2022: TC3, 14th TC5, 6th TC16 and 5th TC22 International Conference, Cavtat-Dubrovnik, Croatia. DOI: 10.21014/tc3-2022.082.
8. Fidelus J.D., Puchalski J.G., Trych-Wildner A., Urbański M., Weidinger P., Estimation of Uncertainty for the Torque Transducer in MNm Range – Classical Approach and Fuzzy Sets. “Energies”, Vol. 16, No. 16, 2023, DOI: 10.3390/en16166064.
9. Fotowicz P., Obliczanie niepewności rozszerzonej metodą analityczną opartą na splocie rozkładów wielkości wejściowych. „Pomiary Automatyka Robotyka“, R. 8, Nr 1, 2005, 5–9.
10. Allan D., Hellwig H., Kartaschoff P., Vanier J., Vig J., Winkler G.M., Yannoni N.F., Standard Terminology for Fundamental Frequency and Time Metrology. Proceedings of the 42nd Annual Frequency Control Symposium, Baltimore, MD, USA, 1–3 June 1988, 419–425, DOI: 10.1109/FREQ.1988.27634.
11. Dennis J.E., Schnabel R.B.,Numerical Methods for Unconstrained Optimization and Nonlinear Equations. SIAM 1996 reproduction of Prentice-Hall, SIAM: Philadelphia, PA, USA 1983, DOI: 10.1137/1.9781611971200.
12. Fletcher R.,Practical Methods of Optimization. 2nd ed., John Wiley and Sons: New York, NY, USA 1987, DOI: 10.1002/9781118723203.
13. Levenberg K.A., A Method for the Solution of Certain Non-Linear Problems in Least Squares. “Quarterly of Applied Mathematics”, Vol. 2, 1944, 164–168, DOI: 10.1090/qam/10666
14. Marquardt D., An Algorithm for Least-Squares Estimation of Nonlinear Parameters. “Journal of the Societyfor Industrial and Applied Mathematics”, Vol. 11, No. 2, 1963, 431–441.
15. Kanzow C.H., Yamashita N., Fukushima M., Levenberg–Marquardt methods with strong local convergence properties for solving nonlinear equations with convex constraints. “Journal of Computational and Applied Mathematics”, Vol. 172, No. 2, 2004, 375–397, DOI: 10.1016/j.cam.2004.02.013.
16. Teunissen P., Applications of Linear and Nonlinear Models: Fixed Effects, Random Effects, and Total Least Squares “Journal of Spatial Science”, Vol. 58, No. 2, 2013, 339–340, DOI: 10.1080/14498596.2013.815147.
17. Puchalski J.G., A new algorithm for generalization of least square method for straight line regression in Cartesian system for fully-correlated both coordinates. “International Journal of Automation, Artificial Intelligence and Machine Learning”, Vol. 2, No. 2, 2021, 20–54, DOI: 10.61797/ijaaiml.v2i2.98.
18. Puchalski J., Warsza Z.L., Matching The Parabolic Curve to Both Correlated Coordinates of Tested Points by the Linear Regression Method. Paris MathMet 2022, EMN Conference Presentations, [www.lne.fr/system/files/pdf/MATHMET-2022-Presentations-Thursday-3-November.zip].
19. Reed B.C., Linear leastsquares fits with errors in both coordinates. II: Comments on parameter variances. “American Journal of Physics”, Vol. 60, No. 1, 1992, 59–62, DOI: 10.1119/1.17044.
20. Puchalski J.G., Fidelus J.D., Fotowicz P., Algorithms Utilized for Creep Analysis in Torque Transducers for Wind Turbines. “Algorithms”, Vol. 17, No. 2, 2024, DOI: 10.3390/a17020077.
Jacek Grzegorz Puchalski, Janusz Daniel Fidelus, Paweł Fotowicz
Analysis of Creep in Torque Transducers for Wind Turbine
Abstract: A crucial aspect to consider when assessing the effectiveness of wind turbines is the phenomenon of torque creep, both under load and without load. This phenomenon significantly affects the proper functioning of torque transducers, thus necessitating the utilization of suitable algorithms for analysing measurement data. The least squares method is well-suited for this type of analysis. Linear regression was employed to study the creep trend, while a third-degree non-linear polynomial curve enabled a more precise visualization of creep, yielding valuable insights.
Absolwent Wydziału Fizyki Technicznej i Matematyki Stosowanej (1986 r.) oraz Wydziału Elektroniki (1988 r.) Politechniki Warszawskiej. W latach 1987–1995 asystent na Politechnice Warszawskiej, w 1995 r obronił pracę doktorską. Kolejne 10 la t pracował w branży nowych technologii w firmach produkujących i importujących kasy rejestrujące. Przygotowywał i uczestniczył w certyfikacji nowych modeli kas w Ministerstwie Finansów oraz prowadził szkolenia i serwis urządzeń fiskalnych. Od 2006 r. pracuje w Głównym Urzędzie Miar. Zajmował się zatwierdzeniem typu i oceną zgodności taksometrów elektronicznych i mierników prędkości w ruchu drogowym, a obecnie jako główny metrolog rozwija metody matematyczne szacowania niepewności pomiarowych.
dr inż. Janusz D. Fidelus janusz.fidelus@gum.gov.pl
ORCID: 0000-0001-9996-9484
Od 2018 r. pracuje w Głównym Urzędzie Miar, przedstawiciel GUM w KT 314 PKN ds. Nanotechnologii, członek TC5 IMEKO, CCM-WGH, CCM-WGFT. Stopień doktora nauk technicznych w dziedzinie inżynierii materiałowej uzyskał na Akademii Górniczo-Hutniczej w Krakowie. Wiedzę i doświadczenie w zakresie wytwarzania i charakteryzacji materiałów i nanomateriałów funkcjonalnych do zastosowań w technice i medycynie zdobywał podczas zagranicznych stypendiów naukowych (Instytut Naukowy Weizmanna, ETH Zürich) oraz w krajowych instytutach badawczych (IWC PAN, IF PAN) i firmach z prywatnym kapitałem (InPhoTech, PCFS), twórca i współtwórca 11 patentów i siedmiu technologii wytwarzania innowacyjnych materiałów oraz autor i współautor ok. 30 międzynarodowych i krajowych projektów badawczych oraz ponad 50 publikacji w międzynarodowych i krajowych czasopismach naukowych (h-index 12).
dr inż. Paweł Fotowicz pawel.fotowicz@gum.gov.pl
ORCID: 0009-0003-9234-2293
Absolwent Politechniki Warszawskiej. Studia ukończył na Wydziale Mechaniki Precyzyjnej w 1981 r. Do 1999 r pracował w Instytucie Metrologii i Systemów Pomiarowych Politechniki Warszawskiej, specjalizując się w problematyce laserowych technik pomiarowych, będąc współautorem sześciu patentów. Od 1999 r. pracuje w Głównym Urzędzie Miar, zajmując się zagadnieniami teoretycznymi metrologii, głównie teorią niepewności pomiaru. Jest autorem ponad stu publikacji – referatów i artykułów w czasopismach krajowych i zagranicznych.
Comparative Analysis of the Guided Bomb Flight Control System for Different Initial Conditions
Marta Grzyb, Zbigniew Koruba
Kielce University of Technology, Al. Tysiąclecia Państwa Polskiego 7, 25-314 Kielce
Abstract: The article presents research on the influence of initial conditions on the self-guidance of a guided bomb towards a stationary ground target. The aim of the study was to investigate the correlation between the initial tilt angle of the guided bomb and the precision of impact, as well as the time required to reach the surface target. To fulfil this purpose, the flight control system of the guided bomb needed to be designed accordingly. The need to develop these systems arises from emerging information that Ukraine and Israel are converting unguided bombs into precision-guided ones. This justification is based on objective reasons. The article analyses the application of classical controllers. PI, PD and PID. Their task was to accurately guide a stationary ground target under various initial conditions. A preliminary method has been proposed for selecting optimal gain coefficients for the PID controller, which constitutes the main component of the autopilot of the guided bomb flight control system. A proprietary interpolation method was suggested, starting with the use of an optimization function in MATLAB software. The numerical findings are presented in a graphical manner.
During the Vietnam War, the US Armed Forces confirmed the effectiveness of guided bombs, a type of precision weapon [1]. The ongoing armed conflict in Ukraine appears to confirm this, especially considering that 1159 guided aerial bombs were dropped on the country in September 2023. According to the Defense Express web portal, the utilization of this type of armament has doubled since May, when a record was set [2]. The armed conflict that started in early October 2023 suggests the use of guided bombs as precision weaponry. Israeli aircraft of the 5th generation F-35I Adir aircraft drop nearly 1-tonne GBU-31 JDAM guided bombs to provide direct support to ground troops. 110 kg bombs of lighter weight are used less frequently [3]. Armed conflict in the Gaza Strip also demonstrates another technique. Guided bombs are dropped no closer than 600 m from friendly forces, as per safety requirements. The utilization of air bombs of this type, dropped from a short distance, necessitates a high degree of precision. This precision can be guaranteed through the implementation
Autor korespondujący:
Marta Grzyb, mgrzyb@tu.kielce.pl
Artykuł recenzowany nadesłany 08.04.2024 r., przyjęty do druku 08.07.2024 r.
of a well-designed guided bomb control system. It should be noted that guided bombs without propulsion have a lower risk of early detection and counteraction, even in the case of light guided bombs (Szakal I) [4].
This article presents research on the impact of the initial conditions of a guided bomb drop on the accuracy of hitting and the time of reaching the designated target for the designed control system. The analysis will cover three types of classical regulators. PI, PD and PID. Although controllers have been used for air-ground flying object systems such as missiles [5], UAVs [6], and rotorcraft [7], there is still a lack of research addressing guided bombs while taking into account the influence of initial conditions. The available literature indicates that several control methods have been used for guided bombs, such as a PD controller [8, 9], a hybrid controller [10], an optimal controller [11, 12], and a modified PID and PI-D controller [13].
The authors in the work [14] observe that the design of appropriate initial guidance conditions becomes an important problem that needs to be analysed. Research investigating the influence of initial conditions on the guidance process is scarce. They mainly pertain to the Impact-Time-Control Guidance (ITCG) methods [15]. The article [16] illustrates examinations conducted for various values of the slope angle while simultaneously preserving a constant impact duration. However, the studies presented in the work [17] analyse the impact of time errors for various initial course angle values, depending on the time constant of the autopilot dynamics model. The paper [18] suggests a two-stage control using the ITACG approach. The research concerned the verification of the effectiveness of the proposed guidance method, as well as its ability to adapt to different initial conditions and constraints for the final phase of flight. The purpose of using
random initial conditions for a rocket projectile as presented in work [19] was intended to validate the effectiveness and practicality of the integrated guidance and control system. Similarly, the study [20] involved testing the guidance algorithms for three nominal trajectories that differed in the initial angle of projectile inclination. The guidance method proposed in [21] enables the calculation of impact times on the target, considering the initial conditions. Deviations of initial values from their nominal values may be interpreted as errors made by the pilot. And thus, the study [22] examined the effectiveness of the proposed approach and landing guidance law in relation to initial position errors for the unpowered reusable launch vehicle. Heading errors of –30 degrees and flight path angle errors of –10 degrees were considered. The guidance technique applied enabled the elimination of initial errors from the first flight phase.
Proportional navigation has been extensively studied over the past few decades [23, 24] and it is commonly used as a guidance method for various aerial objects, including guided missiles [25]. According to the authors [26], it is crucial to select a guidance method that can bring the guided bomb to the target with an error no greater than the warhead blast radius. The article assumes that a guided bomb’s precision in hitting a ground target should have an error margin lower than 5 m.
The aim of this study was to analyse the influence of initial release conditions on the self-guidance accuracy for a guided bomb, as there is a lack of research on this topic in the available literature.
2. Geometrical and mass properties of a guided bomb
Geometrical and mass parameters of a guided bomb determine its physical dimensions that define its shape and size. Figure 1
shows the dimensions of the guided bomb under consideration. It is a rigid, axially symmetric solid with constant mass. Tables 1 and 2 present the main geometric parameters and mass-inertial data of the guided bomb, respectively.
The quantities described in tables 1 and 2 and presented in Fig. 1, can be defined as follows:
Lb – length of the guided bomb body;
d – diameter of the guided bomb body;
dst – span of stabilisers of the guided bomb;
x p – coordinates of the centre of pressure of the guided bomb;
x sm – coordinates of the centre of mass of the guided bomb;
ld – distance between the centre of pressure of the rudder and the centre of mass of the guided bomb;
m – guided bomb mass;
I x – constant mass moment of inertia of guided bomb body in relation to x axis;
I y – constant mass moment of inertia of guided bomb body in relation to y axis;
I z – constant mass moment of inertia of guided bomb body in relation to z axis;
Sb – characteristic surface (cross-sectional area of the guided bomb).
3. Mathematical model of a guided bomb
The following assumptions have been made to analyse the movement of a guided self-seeking bomb towards a ground target:
the guided bomb is a solid object with a fixed mass and inertial moments, as well as a stable positioning of the mass centre;
−the b omb’s body is symmetrical along its axis; the Oxz plane is the geometric, mass, and aerodynamic symmetry plane;
−the guided b omb possesses three degrees of freedom.
The movement of the guided bomb requires the use of suitable coordinate systems to be described objectively and clearly. The article analyses the movement of a guided bomb solely in the vertical plane. That is due to the fact, that significant deviations of its flight parameters are visible for that plane. The equations of motion for the guided bomb were derived by taking into account Newton’s law and the adopted coordinate systems. Figure 2 illustrates the forces that act on the guided bomb and the coordinate systems used.
Based on the given assumptions and coordinate systems, the non-linear equations of motion for the guided bomb being examined can be represented in the form [28]:
Tabela 2. Dane masowo-bezwładnościowe bomby kierowanej
Fig. 1. Geometrical data of the guided bomb [27] Rys. 1. Dane geometryczne bomby kierowanej [27]
Table 1. Geometrical data of a guided bomb
Tabela 1. Dane geometryczne bomby kierowanej
Table 2. Main mass-inertia data of a guided bomb
Rys. 2. Układ sił działających na bombę kierowaną, prędkości liniowe oraz prędkości kątowe [10]
aerodynamic normal force, CaNr – coefficient of the aerodynamic damping force, C m – coefficient of the aerodynamic tiling moment, C q – coefficient of the damping tiling moment, CNd – coefficient of the aerodynamic control force.
4. Guided bomb control system
Selecting a control methodology is crucial for directing air-to-ground aerial vehicles, especially guided bombs. Compared to rocket projectiles, bomb lack propulsion, which makes the design of their control systems more intricate. It is crucial to recognise that the primary objective of guided bomb is to achieve precise impact on a ground target in the shortest time possible. We are referring to high-precision weapons. To meet these requirements, it is crucial to develop a dependable flight control system for guided bombs. The initial drop conditions of the guided bomb from the carrier must also be taken into consideration by this system. This is frequently neglected aspect in various analyses. No articles in the literature address the influence of the initial flight conditions (release conditions) of a guided bomb on the course of its flight and the effectiveness of the control system.
The controller id the main component of the autopilot and is responsible for generating control signals for the actuator system. The signals’ values can be determined using various control methods, including classical PID control, sliding control, optimal control, or hybrid forms of controllers. Recently, guided bomb control systems have become more advanced, resulting in improved efficiency.
The work suggests using PI, PD, and PID controller algorithms for the control signal. For a proportional-integral-derivative (PID) controller, the signal is taken in the form described by [29]:
tk wpid t de ukekedtk
Figure 1 illustrates the forces acting on the guided bomb during its flight, including force of gravity F g, aerodynamic force F a, and control force F q. Equations (1)–(3) provide a formulation for the forces F x and F z, moment of force M y exerted on the guided bomb during its flight [10]:
where: e – control deviation, k p, ki, kd – constant gain coefficients of the PID controller.
In order to generate a control signal, the control deviation must be determined. In this case, the deviation can be expressed as: z e =Θ−Θ (9)
where: , z Θ Θ – set and current value of the pitch angle.
The inclination angle z Θ value is a result of the chosen guidance method. Proportional navigation [30] is a frequently used method in the studies considered. The algorithm used to outline the adopted guidance method is described as follows:
a dtdt ε γε = (10)
where: g – acceleration of gravity, U, V – components of the velocity vector of the guided bomb in relation to the air in the boundary system Sxyz, Q – component of the angular velocity vector of the guided bomb body, ρ – air density, V a – velocity vector of the guided centre of bomb mass in relation to the air, w δ – deflection angle of the height rudder, CaX – coefficient of the aerodynamic axial force, CaN – coefficient of the
Upon ejection of the guided bomb from the carrier, the inclination z Θ angle aligns with the line of sight (LOS) inclination angle: z ε Θ= (11)
The main objective in analysing the flight control systems of a guided bomb is to accurately select the gain coefficients for the proposed PID controller. The following section outlines the method used the select them.
Fig. 2. Systems of force acting on a guided bomb, linear velocity and angular velocity [10]
Marta Grzyb, Zbigniew Koruba
Comparative
5. Simulation results
To analyse the effect of initial conditions on the guidance accuracy of a guided bomb on a ground target, simulation results were performed in MATLAB/Simulink software. Studies were carried out for three values of initial pitch angles: { } 0 20,0,20, b Θ=+°°−° and for two values of initial velocity Vb0 = {60 m/s, 120 m/s} for the guided bomb. For each of the cases considered, a numerical simulation was performed assuming the other initial condition values: initial position of the guided bomb: x g0 = 0 m, z g0 = 3000 m;
initial p osition of the ground target: x c0 = 1000 m, z c0 = 0 m;
initial ground target velocity: for a stationary target we assumed V c0 = 0 m/s; initial inclination angle of the flight path: 0 0; γ =° initial angle of the attack: 0 0. α =°
The simulation studies aimed to verify the effectiveness of the proposed control system. The range of the guided b omb for the given initial conditions needed to be determined. This originated from the potential execution of the specified combat objective. Figure 3 presents the flight trajectories of the guided bomb for three tested values of the pitch angle and two initial flight velocity values of the guided bomb Vb0 = {60 m/s, 120 m/s}.
It is assumed that the simulation studies used data on the parameters of the ground target obtained from the self-guided radar head, which accurately determines the parameters without any measurement errors. Before the carrier is launched, the guided bomb is provided with the coordinates of the ground target.
Guided bombs are characterised by their range, which increases with initial velocity and release angle, despite lacking their own propulsion. Table 3 shows the payload capacity of the guided bomb for three different pitch angles and two initial values of guided bomb flight speed.
Figure 4 shows a graphic representation of the method for dropping a guided bomb at a specific angle: 01 20 b Θ=+° we have a case of an ascending flight, 02 0 b Θ=° – a case of a horizontal flight, and for 03 20 b Θ=−° – a case of a diving flight.
Guidance for the guided bomb was performed using proportional navigation algorithm with aε = 3.5 coefficient. In addition, for the control we are considering, it is assumed
4. Three scenarios for dropping a guided bomb homing at a ground target
4. Trzy scenariusze zrzucenia bomby kierowanej na cel naziemny
that the maximum deflection of the rudder max 20 δ =±° . The simulation step is set to be 0.01 s.
The initial conditions have been modified to replicate the most commonly encountered scenarios in the field of combat.
Fig. 3. Flight paths of a guided bomb for different initial conditions
Rys. 3. Tory lotu bomby kierowanej dla różnych warunków początkowych
Table 3. Payload capacity range for dive, horizontal, and climb maneuvers of the bomb
Tabela 3. Donośność bomby kierowanej dla lotu nurkowego, poziomego i wznoszącego
Fig.
Rys.
5.1. Simulation results for the initial velocity of a guided bomb Vb01 = 60 m/s
Simulation 1. The initial pitch angle is 01 20 Θ=+° b
The first simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 01 20 Θ=+° b .
Fig. 5. Homing of a guided bomb on a stationary ground target for a pitch angle Θb01 = +20°: a) trajectory, b) pitching angle, c) deflection angle of the height rudder, d) control force, e) angle deviations of bomb flight, f) angle of attack Rys. 5. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kąta pochylenia Θb01 = +20°: a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Simulation 2. The initial pitch angle is 02 0 Θ=° b
The second simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 02 0 Θ=° b
Fig. 6. Homing of a guided bomb on a stationary ground target for a pitch angle Θb02 = 0°: a) trajectory, b) pitching angle, c) deflection angle of the height rudder, d) control force, e) angle deviations of bomb flight, f) angle of attack Rys. 6. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kata pochylenia Θb02 = 0°: a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Simulation 3. The initial pitch angle is 03 20 Θ=−° b
The third simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 03 20 Θ=−° b .
Fig. 7. Homing of a guided bomb on a stationary ground target for a pitch angle Θb03 = – 2 0° : a) trajectory, b) pitching angle, c) deflection angle of the height rudder, d) control force, e) angle deviations of bomb flight, f) angle of attack Rys. 7. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kata pochylenia Θb03 = –2 0° : a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Table 4. Summary of homing parameters for a guided bomb directed at a stationary target Tabela 4. Zestawienie parametrów naprowadzania bomby kierowanej na nieruchomy cel naziemny
Guidance time [s] Hit accuracy [m]
Type of controller
PI 27.2925.1323.361.952.472.93
PD 26.6224.7223.242.331.933.42
PID 27.2425.0523.341.231.221.52
Table 5. Summary of classic controller gain coefficient for a stationary target Tabela 5. Zestawienie współczynników wzmocnień regulatora dla celu nieruchomego
Gain coefficients [s]
Type of controller
PD k p = 0.245 kd = 0.045 k p = 0.215 kd = 0.004 k p = 0.13 kd = 0.19
PID
k p = 0.018 ki = 0.0066 kd = 0.02
k p = 0.042 ki = 0.00725 kd = 0.012
k p = 0.018 ki = 0.006 kd = 0.02
The simulations show that for all analyzed cases the assumed accuracy of hitting a ground target was achieved. The PD controller was characterized by the largest rudder deflection, even reaching its maximum max 20 δ =−° values. The use of the PID controller made it possible to reach the target with the smallest rudder deflection angle, which will minimize the energy consumption of the control actuation system. The angle of attack reached acceptable values. The time for a guided bomb to reach a ground target for all analyzed cases was similar. Of course, as expected, the smallest time was achieved for the angle 03 20 Θ=−° b (a case of a diving flight). Table 4 and 5 presents the values of the obtained parameters.
Table 5 displays the selected magnification ratios presents the selected gain coefficient for three classical controller structures: PI, PD and PID. The study focused on investigations for three initial values of the pitch angle: 01 Θ b , 02 Θ b and 03 , Θ b as well as the initial velocity of Vb01 = 60 m/s.
The simulations carried out show that the PD controller gives the maximum rudder deflection and the highest angle of attack. Table 4 presents the achieved results for the PID controller, showing the shortest guidance time and highest accuracy in hitting the ground target with the guided bomb.
5.2. Simulation results for the initial velocity of a guided bomb Vb02 = 120 m/s
Another research group focused on the analysis of the impact of initial pitch angle values 01 , Θ b 02 Θ b and 03 Θ b (as in chapter 5.1), but for a twice higher initial velocity of guided bomb flight.
Simulation 1. The initial pitch angle is 01 20 Θ=+° b
The first simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 01 20 Θ=+° b
e) angle deviations of bomb flight, f) angle of attack Rys. 8. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kata pochylenia
trajectory, b) pitching angle, c) deflection angle
= +2
°: a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Fig. 8. Homing of a guided bomb on a stationary ground target for a pitch angle
of the height rudder, d) control force,
Marta Grzyb, Zbigniew Koruba
Comparative
Simulation 2. The initial pitch angle is 02 0 Θ=° b
The second simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 02 0 Θ=° b
Fig. 9. Homing of a guided bomb on a stationary ground target for a pitch angle Θb02 = 0° : a) trajectory, b) pitching angle, c) deflection angle of the height rudder, d) control force, e) angle deviations of bomb flight, f) angle of attack
Rys. 9. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kata pochylenia Θb02 = 0°: a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Simulation 3. The initial pitch angle is 03 20 Θ=−° b
The third simulation assumed that the dropping of a guided bomb from the aircraft takes place at a pitch angle of 03 20 Θ=−° b
Fig. 10. Homing of a guided bomb on a stationary ground target for a pitch angle Θb03 = – 2 0°: a) trajectory, b) pitching angle, c) deflection angle of the height rudder, d) control force, e) angle deviations of bomb flight, f) angle of attack Rys. 10. Naprowadzanie bomby kierowanej na nieruchomy cel naziemny dla kata pochylenia Θb03 = –2 0°: a) trajektoria, b) kąt pochylenia, c) kąt wychylenia steru wysokości, d) siła sterująca, e) kątowy uchyb sterowania, f) kąt natarcia
Table 6. Summary of homing parameters for a guided bomb directed at a stationary target
Tabela 6. Zestawienie parametrów naprowadzania bomby kierowanej na nieruchomy cel naziemny
Guidance time [s]
Type of controller
Hit accuracy [m]
PI 27.8723.4921.461.581.872.03
PD 25.0222.8221.281.681.882.37
PID 27.5523.6721.440.660.931.08
Table 7. Summary of classic controller gain coefficient for a stationary target
Tabela 7. Zestawienie współczynników wzmocnień regulatora dla celu nieruchomego
Gain coefficients [s]
Type of controller
PI k p = 0.0025 ki = 0.0107 k p = 0.096 ki = 0.0086
PD
PID
k p = 0.404 kd = 0.002
k p = 0.026 ki = 0.0104 kd = 0.013
k p = 0.271 kd = 0.009
k p = 0.0424
0.012
Figures 8–10 show research results for three values of initial angles and three controller structures. Increasing the value of the initial velocity to Vb02 = 120 m/s primarily resulted in a shorted time for the guided bomb to reach the ground target. It can also be seen that with the higher velocity, we obtained a higher accuracy of the guided bomb hitting the target. The angle of attack for this case also takes acceptable values. Table 6 presents the key flight parameters of the guided bomb while autonomously targeting a stationary ground objective. Table 7 illustrates the gain coefficient for three controller structures: PI, PD, and PID. They have been carefully selected to achieve the highest accuracy in hitting the ground target.
6. The Procedure for Determining Gain Coefficients for PID Controller
The procedure of determining gain coefficients for each of the proposed classical controller structures is usually a highly time-consuming process that necessitates great precision. The literature shows numerous techniques for determining these factors for different types of study objects. Generally, these are approaches based on optimization theory [31, 32]. In the presented study, the fmincon function [33] was used in the MATLAB software. This function requires the input of several parameters, of which, after conducting a series of tests, the most difficult turned out to be determining the range of values for each of the sought-after gain coefficients and the initial value. Providing a considerable scope resulted in the absence of a solution. Consequently, utilizing this optimization feature necessitates a high level of expertise on the part of the investigator. A method for selecting gain coefficients k p, ki and kd proposed in the article, which utilizes the interpolation method of individual gain coefficients depending on the pitch angle Θ The research was conducted for two tested initial velocity values, namely: Vb01 = 60 m/s and Vb02 = 120 m/s. Due to the
k p = 0.00015 ki = 0.00655
k p = 0.05 kd = 0.225
k
= 0.0115
= 0.0059 kd = 0.034
highest accuracy of guided bomb impact on the ground target, only PID controller was used for further research.
In order to design the function of changing PID k p, ki, kd controller coefficients for the range of pitch angle 20,20,Θ∈− a third-degree polynomial was used. Interpolation was carried out through the cubic spline function in MATLAB [34]. This type of interpolation function allows for obtaining a streamlined smooth curve [35], which has been defined using given data points.
Initially, the gain values for the pitch angle {} 0 20,0,20 Θ=−°°° b presented in Chapter 5, specifically in Table 5 and Table 7, were used.
Four arbitrary pitch angle values were selected for the purpose of verifying the proposed method: { } 0 8,0.6,4,12 Θ=−°−°°° b , for which the values of the PID controller gain coefficients have been determined.
Fig. 11. Cubic spline interpolation for three data points
Rys. 11. Interpolacja funkcją wielomianową dla trzech punktów danych
In Fig. 11, the interpolation function of gain coefficients for the PID controller is presented for two velocity values, which utilized values for three data points.
Table 8 contains values of homing parameters, i.e. guidance time and accuracy of hitting the ground target, for two tested initial velocities and three data points.
In the next step, the number of data points was increased to five, and the initial values of the pitch angle were { } b0 20,10,0,10,20 Θ=−°−°°°° . In Fig. 12, the interpolating function of gain coefficients for PID controller is presented for two velocity values and five data points.
Rys.
Table 9 contains values of homing parameters, i.e. guidance time and accuracy of hitting the ground target, for two tested initial velocities and five data points.
Based on the provided study findings, we can determine that even a minor quantity of data points has produced encouraging outcomes. Increase (even slight) in the number of these points has allowed to increase the effectiveness of PID controller operation. Consequently, it can be affirmed that this approach of selecting PID controller gain coefficients based on the initial change in the pitch angle value 0 Θ b is suitable, albeit extremely time-consuming. To achieve this, the next stage of the work will consist of the automatic selection of gain factors for a classical controller using artificial neural network. The flight height of a guided bomb is taken into account together with the angle of pitch and velocity. It will allow for a quick selection of these coefficients using an onboard computer and the attainment of an efficient control system.
7. Conclusions
As indicated by the results of numerical investigations, the appropriate selection of initial conditions and gain coefficients of PI, PD, and PID controllers determines the effectiveness of the homing process of a guided bomb towards a ground target. This therefore requires the proper design of the flight control system for the guided bomb, implemented using classical controllers PI, PD or PID. The simulations conducted have shown that the most effective controller in terms of accurately hitting the ground target is PID. However, it is important to
Table 8. Overview of the homing parameters of a guided bomb attacking a fixed target Tabela 8. Parametry naprowadzania bomby kierowanej atakującej nieruchomy cel naziemny
3-Point Interpolation
Fig. 12. Cubic spline interpolation for five data points
12. Interpolacja funkcją wielomianową dla pięciu punktów danych
Table 9. Overview of the homing parameters of a guided bomb attacking a fixed target
Tabela 9. Parametry naprowadzania bomby kierowanej atakującej nieruchomy cel naziemny
choose appropriate controller coefficients for different bomb pitch angle. The precision of bomb homing will increase only if these conditions are met, ensuring no losses among accidental targets, especially civilian population. The recent military conflicts have demonstrated that this is not always the case.
References
1. Elert S., Sokołowski D., Precision gliding bombs used by armed forces and their development trends. “Issues of Armament Technology”, Vol. 148, No. 4, 2018, 61–78, DOI: 10.5604/01.3001.0013.1673
2. Ukraine Advances in the South: Russia Unleashes Aerial Guided Bombs. [https://bylinetimes.com/2023/11/23/ukraine-advances-inthe-south-russia-unleashes-aerial-guided-bombs] (accessed on 5 January 2024).
3. Israeli F-35s don’t use „their stealth” while bombing the Gaza Strip. [https://bulgarianmilitary.com/2023/11/15/israeli-f-35s-dontuse-their-stealth-while-bombing-the-gaza-strip] (accessed on 5 January 2024).
4. E-RAPORT MSPO 4/2022 – Lekka bomba kierowana Szakal I od WITU. [www.altair.com.pl/e-report/view?article_id=1368] (accessed on 5 January 2024).
5. Xu Y., Wang Z., Gao B., Six-Degree-of-Freedom Digital Simulations for Missile Guidance and Control. “Mathematical Problems in Engineering”, 2015, DOI: 10.1155/2015/829473.
6. Mu L., Wang B., Zhang Y., Feng N., Xue X., Sun W., A Vision-Based Autonomous Landing Guidance Strategy for a Micro-UAV by the Modified Camera View. “Drones”, Vol. 7, No. 6, 2023, DOI: https://doi.org/10.3390/drones7060400.
7. Kim D., Oh H.-S., Black-box Optimization of PID Controllers for Aircraft Maneuvering Control. “International Journal of Control, Automation and Systems”, Vol. 20, 2022, 703–714, DOI: 10.1007/s12555-020-0915-6.
8. Głębocki R., Guidance impulse algorithms for air bomb control. “Bulletin of the Polish Academy of Sciences. Technical Sciences”, Vol. 60, No. 4, 2012, 825–833, DOI: 10.2478/v10175-012-0096-4.
9. Gad A.S., Aly M.S., Smart bomb’s guidance loop design. [In:] Proceedings of the 8th International Conference on Aerospace Sciences & Aviation Technology, Cairo, Egypt, 4–6 May 1999.
10. Grzyb M., Koruba Z., Analysis of a Hybrid Guided Bomb Control System while Self-guided to a Ground Target. “Problems of Mechatronics, Armament, Aviation, Safety Engineering”, Vol. 13, No. 4, 2022, 23–38, DOI: 10.5604/01.3001.0016.1454.
11. Han Y., Zheng Z., Chong Y., Integrated guidance and control design for guided bomb with terminal angle constraint. [In:] Proceedings of the 2015 International Conference on Information and Automation, Lijiang, China, 8–10 August 2015, DOI: 10.1109/ICInfA.2015.7279495.
12. Kim Y., Kim J., Park M., Guidance and Control System Design for Impact Angle Control of Guided Bombs. [In:] Proceedings of the International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 27–30 October 2010, DOI: 10.1109/ICCAS.2010.5670209.
13. Attallah A.S., El-Sheikh G.A., Hafez A.T., Mohammady A.S., Attitude Control of Gliding Bomb using Classical PID and Modified PI-D Controllers. “Journal of Multidisciplinary Engineering Science and Technology”, Vol. 3, No. 4, 2016, 4451–4456.
14. Li R., Xia Q., Wen Q., Extended optimal guidance law with impact angle and acceleration constraints. “Journal of Systems Engineering and Electronics”, Vol. 25, No. 5, 2014, 868–876, DOI: 10.1109/JSEE.2014.00100.
15. Liu S., Liu W., Yan B., Liu S., Yin Y., Impact Time Control Guidance Law for Large Initial Lead Angles Based on Sliding Mode Control. [In:] Proceedings of the 2nd International Conference on Signal Processing and Computer Science, Qingdao, China, 20–22 August 2021, DOI: 10.1088/1742-6596/2031/1/012050.
16. Zhang Y., Wang X., Wu H., Impact time control guidance law with field of view constraint. “Aerospace Science and Technology”, Vol. 39, 2014, 361–369, DOI: 10.1016/j.ast.2014.10.002.
17. Saleem A., Ratnoo A., Lyapunov-Based Guidance Law for Impact Time Control and Simultaneous Arrival. “Journal of Guidance, Control, and Dynamics”, Vol. 39, No. 1, 2016, 164–172, DOI: 10.2514/1.G001349.
18. Zhu J., Su D., Xie Y., Sun H., Impact time and angle control guidance independent of time-to-go prediction. “Aerospace Science and Technology”, Vol. 86, 2019, 818–825, DOI: 10.1016/j.ast.2019.01.047.
19. Wang W., Wu M., Chen Z., Liu X., Integrated Guidance-and-Control Design for Three-Dimensional Interception Based on Deep-Reinforcement Learning. “Aerospace”, Vol. 10, No. 2, 2023, DOI: 10.3390/aerospace10020167.
20. Celis R., Cadarso L., Adaptive Navigation, Guidance and Control Techniques Applied to Ballistic Projectiles and Rockets, 1st ed., 2018, DOI: 10.5772/intechopen.73511.
21. Kim J., Kim Y., Impact Time Control Guidance with Finite-Time Convergence Based on Pure Proportional Navigation [In:] Proceedings of the 18th European Control Conference, Napoli, Italy, 25–28 June 2019, DOI: 10.23919/ECC.2019.8795943.
22. Zhao Y., Sheng Y., Liu X., Unpowered Landing Guidance with Large Initial Condition Error. [In:] Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014, DOI: 10.1109/CGNCC.2014.7007465.
23. Cho N., Kim Y., Optimality of augmented ideal proportional navigation for maneuvering target interception. “IEEE Transactions on Aerospace and Electronic Systems”, Vol. 52, No. 2, 2016, 948–954, DOI: 10.1109/TAES.2015.140432.
24. Jeon I.-S., Karpenko M., Lee J.-I., Connections between proportional navigation and terminal velocity maximization guidance. “Journal of Guidance, Control, and Dynamics”, Vol. 43, No. 2, 2020, 383–388, DOI: 10.2514/1.G004672.
25. Stefański K., Grzyb M., Flight of a Guided Aerial Bomb Along a Vertical Plane in Turbulent Atmosphere. “Problems of Mechatronics, Armament, Aviation, Safety Engineering”, Vol. 10, No. 2, 2019, 19–30, DOI: 10.5604/01.3001.0013.4802.
26. Gacek J., Motyl K., Sienicki K., Wajszczyk B., The Impact of Control Discreteness on the Process of Guidance of an Anti-Aircraft Short-Range Missile System. “Problems of Mechatronics, Armament, Aviation, Safety Engineering”, Vol. 8, No. 2, 2017, 85–106, DOI: 10.5604/01.3001.0010.1573.
27. Grzyb M., Analyzing the guidance of an air-to-ground weapon modelled as a constrained system. Doctoral of Thesis, Kielce University of Technology, Poland, 2023.
28. Kowaleczko G., Modelling the flight dynamics of flying object, 1st ed.; Publisher: Air Force Institute Publishing House, Warsaw, 2018, 22–24.
29. Szmidt P., Gapiński D., Koruba Z., The analysis of selection optimal parameters of PID controllers for a modified artillery-missile system. [In:] Proceedings of 23rd International Conference Engineering Mechanics, Svratka, Czech Republic, 15–18 May 2017.
30. Ong J., Pierson B.L., Optimal planar evasive aircraft maneuvers against proportional navigation missiles. “Journal of Guidance, Control, and Dynamics”, Vol. 19, No. 6, 1996, 1210–1215, DOI: 10.2514/3.21773.
Marta Grzyb, Zbigniew Koruba
31. Mpanza L.J., Pedro O.O., Optimised Tuning of a PID-Based Flight Controller for a Medium-Scale Rotorcraft. “Algorithms”, Vol. 14, No. 6, 2021, DOI: 10.3390/a14060178.
32. Sudha G., Deepa S.N., Optimization for PID Control Parameters on Pitch Control of Aircraft Dynamics Based on Tuning Methods. “Applied Mathematics & Information Sciences”, Vol. 10, No. 1, 2016, 343–350, DOI: 10.18576/amis/100136.
33. MATLAB fmincon – Nonlinear Optimization. [www.mathworks.com/help/optim/ug/fmincon.html] (accessed on 5 January 2024).
34. Cubic Spline Interpolation – MATLAB & Simulink. [www.mathworks.com/help/curvefit/cubic-spline-interpolation.html] (accessed on 5 January 2024).
35. He C., Dong G.-L., Han D.-F., Model and Analysis for Guide Function of Fire Control Simulation System Based on Cubic Spline Interpolation Function. [In:] Proceedings of 7th International Conference on System Simulation and Scientific Computing, Beijing, China, 10–12 October 2008, DOI: 10.1109/ASC-ICSC.2008.4675356.
Analiza porównawcza systemu sterowania lotem bomby kierowanej
dla różnych warunków początkowych
Streszczenie: W artykule przedstawiono wyniki badań określających wpływ warunków początkowych samonaprowadzania bomby kierowanej na nieruchomy cel naziemny. Skupiono się na analizie zależności początkowego kąta pochylenia bomby kierowanej na dokładność trafienia oraz czas potrzebny na dotarcie do celu naziemnego. W tym celu należało odpowiednio zaprojektować system sterowania lotem bomby kierowanej. Zasadność tych badań wynika między innymi z konieczności rozwoju tych systemów ze względu na pojawiające się informacje, że zarówno Ukraina, jak i Izrael przekształcają niekierowane bomby w ich precyzyjne odpowiedniki. W artykule poddano analizie zastosowanie regulatorów klasycznych: PI, PD oraz PID. Ich zadaniem było precyzyjne naprowadzanie na naziemny cel nieruchomy dla różnych warunków początkowych. Dodatkowo zaproponowana została wstępna metoda doboru optymalnych współczynników wzmocnień dla regulatora PID, stanowiącego główny element autopilota systemu sterowania lotem bomby kierowanej. Wyniki badań numerycznych zostały przedstawione w postaci graficznej.
Słowa kluczowe: bomba kierowana, optymalizacja, system sterowania, warunki początkowe, regulator PID, proporcjonalna nawigacja, oprogramowanie MATLAB, symulacja numeryczna
Marta Grzyb, PhD Eng. mgrzyb@tu.kielce.pl
ORCID: 0000-0002-2258-6167
Graduate of the Faculty of Mechatronics and Mechanical Engineering at the Kielce University of Technology (2009). She is a member of the Machine Design department, which is headed by prof. Zbigniew Koruba. She received her PhD in technical sciences in 2023. She won a distinction for her doctoral thesis in the national competition „Young Innovators”. She deals with the problems of guidance systems for air-to-ground flying objects, including primarily guided bombs. In addition, her interests concern modelling and analysis of the impact of atmospheric disturbances on the flight of such objects. She is the author of about 25 publications and co-author of six patents.
Zbigniew Koruba, DSc PhD Eng. ksmzko@tu.kielce.pl
ORCID: 0000-0003-0715-593X
Graduate of the Mechanical Faculty of the Kiev Institute of Civil Aviation Engineers in Kiev. In 1982, he obtained the title of Master of Engineering, in 1990 the PhD degree, and in 2001 the post-doctoral degree of Technical Sciences. In 2010, he was awarded the title of Professor of Technical Sciences by the President of the Republic of Poland. Since 1984, he has worked at the Kielce University of Technology, holding successive positions of assistant, assistant professor, university professor and full professor. Since 2006, he has been the Head of the Department of Computer Techniques and Armament (currently the Department of Mechatronics and Armament). His research interests include problems of dynamics and control of gyroscopic systems, flying objects, in particular: homing short-range missiles, aerial guided bombs and unmanned aerial vehicles. Author/co-author of more than 300 publications on the above-mentioned topics, including 28 JCR-listed articles, five monographs, six textbooks and scripts. Promoter of eight closed doctoral theses. Reviewer of: nine proceedings for granting the academic title of professor and 19 for granting of the post-doctoral degree, 27 doctoral dissertations. President of the Polish Society of Theoretical and Applied Mechanics, Kielce Branch, member of the Kielce Scientific Society until 2014, expert on mechatronics in the State Accreditation Commission, member of the Dynamics of Systems Section of the Mechanics Committee of the Polish Academy of Sciences in 2003–2012. Member of numerous scientific committees of international, foreign and national conferences. Member of numerous scientific societies, committees and organizations, including PTMTS.
Modeling and Identification of Electromechanical Actuators for the ILR-33 AMBER Rocket
Jan Kierski, Hubert Graczyk
Lukasiewicz Research Network – Institute of Aviation, Aleja Krakowska 110/114,
02-256 Warsaw
Abstract: The aim of the work was to develop a method for modeling, testing, and identifying electromechanical actuators for rocket applications. Works were performed using a prototype solution designed for the ILR-33 AMBER suborbital rocket, developed by Łukasiewicz Research Network –Institute of Aviation. A set of physical relationships was used to create system’s mathematical model, including Kirchhoff’s laws, Newton’s laws, and nonlinear friction models. System’s tests were then performed. A new method of results analysis was applied herein to gather unknown parameters for the model and to confirm an elevated level of convergence between both model and experiment in all cases analyzed. The identification approach proved itself to be effective and useful. A complex approach concerning modeling, testing and identification of such actuators was explained for the first time in this paper. The methods presented herein can be applied in other disciplines, wherever electromechanical actuator systems are used, and where their proper identification is necessary to ensure system reliability and safety. Presented solutions are simple to implement, and the test stands do not require expensive measurement equipment. The results obtained permit to create a highfidelity model at a reasonably low computational cost.
Keywords: Suborbital rocket, ILR-33 AMBER, modeling, identification, electromechanical actuator, servo drive, control system
1. Introduction
In 2014, the ILR-33 AMBER suborbital rocket project was launched at the Łukasiewicz Research Network - Institute of Aviation. The aim of the project is to develop a technology demonstrator, utilizing a hybrid motor with an environmentally friendly oxidizer – HTP (High-Test Peroxide) [1]. The rocket is designed to reach an apogee exceeding 100 km with a payload of 10 kg [2]. However, the execution of unguided rocket flights at such apogees in most of the countries, including Poland is not currently possible. The calculated dispersion of the landing point is of dozens of kilometers and is too elevated to meet the flight safety requirements of landing of all rocket components inside the permitted area. This currently forces high apogee rocket launches to be carried out from very few ranges, which occupancy is elevated and involves high costs and complicated organization of launch campaigns [3].
The decision was therefore taken to develop an active flight control system to compensate trajectory disturbances in the initial phase of flight, thereby significantly reducing the disper-
Autor korespondujący:
Jan Kierski, jan.kierski@ilot.lukasiewicz.gov.pl
Artykuł recenzowany nadesłany 08.04.2024 r., przyjęty do druku 08.07.2024 r.
sion of the impact point. Based on the analysis presented in a study entitled „Polish Suborbital Capabilities”, prepared in 2021 by ILOT for the Polish Space Agency, such solution would permit to execute flights from the Polish coast at apogees above 100 km. This would significantly increase the amount of possible research activities conducted on national training grounds [4]. It has been assumed that such a control system should consist of a set of sensors measuring the current flight parameters, algorithms analyzing data from these sensors and calculating control commands based on them, and an actuation system executing these commands and therefore influencing the flight trajectory.
This article focuses on the mathematical modeling, simulating, and testing a prototype solution of the mentioned actuation system. During the concept design phase, which is out of scope of this article, a preliminary design of the system was developed. The system is built in a canard aerodynamic configuration and can be installed as an additional module directly under the nosecone of the rocket. The currently developed version of the system is envisaged to be used on the ILR-33 AMBER rocket. The system consists of:
Four servo drives connected to the canards. Servo drives are composed of an off-the-shelf BLDC (Brushless Direct Current) motor, a two-stage gear train and an incremental encoder on the motor shaft. Addition of an absolute encoder on the canard shaft is planned in the next version of the system;
Four off-the-shelf motion controllers, on which torque, velocity and position control algorithms are implemented. The motion controllers are attached to an interface PCB
(Printed Circuit Board), which manages signals routing, power distribution and facilitates mechanical integration;
−A Li-ion battery – source of electrical p ower;
−Other structural mechanical and electrical components.
A view of the system integrated with the rocket is shown in Fig. 1. A CAD (Computer Aided Design) model of the prototype version of the system is shown in Fig. 2.
Mathematical models of similar systems have been broadly described in the literature. They were implemented and used among other in the development of HiL (Hardware-in-the-Loop) simulations for guided missiles [5], or for GNC algorithms development purposes [6]. However, models presented in the literature differs considerably in terms of complexity, from simple transmittance equations [5], via moderate complexity models [6, 7], up to very high fidelity representations, including for example complex friction models, nonlinearities and backlash or internal motor phase currents modeling [8, 9]. As it was noticed in [10], the chosen modeling complexity is a trade-off between the desired fidelity level, accessible computing power and the time spent by the system designers. For the case described below, a dedicated approach was developed to provide an accurate representation of the system dynamics at a relatively low computability cost. This was dictated by the main purpose of the model, which was the electromechanical actuator qualification for flight and the use in flight simulations during MiL (Model-in-the-Loop) experiments.
Test stands approach for similar systems’ components was demonstrated in various sources [6, 8, 11]. In the case below, main efforts were put on tests that would permit the collec-
Fig. 3. Control loops implemented on the motion controller
Rys. 3. Pętle sterowania zaimplementowane na kontrolerze ruchu
tion of unknown parameters for the mathematical model, its’ comparison to experimental results and components qualification for flight. A new method of results analysis to gather unknown parameters for the model was presented herein. The effort was also put to minimize the development of dedicated test hardware and software and make use of accessible off-the-shelf solutions.
In the next chapters, a complex approach was shown, including mathematical modeling, performing bench testing, data correlation methods and verification of obtained results. The aim of these activities was not only to qualify the prototype solution, but also to establish and standardize the workflow allowing design evaluation, optimization and stand qualification of similar systems.
2. Mathematical modeling
2.1. Method and assumptions
A mathematical model of the control system was created. The model consists of a set of equations describing the behaviour of its components and of logical relationships between them. It was assumed that:
all the equations of motion should be based on verified physical laws and models.
all the unknown physical values of the model should be verifiable, firstly using experimental tests and secondly using manufacturers’ catalogue data.
A set of simplifying assumptions was also introduced: external loads and accelerations of the rocket (except canard hinge moment) does not affect the system performance. no backlash and elasticities exist in the mechanical elements (elements are stiff) the motor and gears have symmetrical mechanical and electrical characteristics in both rotation directions.
2.2. Motion controller modeling
A Faulhaber MC5004P motion controller is used in the system. The controller behavior was modeled based on the manufacturer’s user manual [14]. The controller has a processor-implemented classical three-stage control algorithm, consisting of feedback loops and a separate power electronics module.
The external loop is responsible for the angular position control and consists of a proportional controller. The middle and inner loop are responsible for controlling respectively the angular velocity and motor current (proportional to the motor torque) and have PI-type controllers implemented. A set of constrains is also included in the model, such as maximum speed, acceleration, and peak current values, consistent with hardware limitations.
A fourth control loop on the motor controller exists and is responsible for adjusting the PWM (Pulse Width Modulation) signal, which corresponds the effective voltage on each of the three motor phases. Due to the method adopted for modeling the BLDC motor, this loop has been intentionally omitted, as it is not necessary for the correct operation of the model.
A general system diagram is shown in Fig. 3.
Fig. 1. Visualization of the guided version of the ILR-33 AMBER rocket – the control system in marked with a green dashed box
Rys. 1. Wizualizacja sterowanej wersji rakiety ILR-33 BURSZTYN – system sterowania oznaczono zieloną przerywaną ramką
Fig. 2. 3D CAD model of the control system prototype version Rys. 2. Model 3D CAD prototypowej wersji systemu sterowania
Due to the aforementioned modeling way, the settings of the control loops in the model and on the real motion controller correspond directly to each other. This allows the settings of the motion controller to be tested and optimized with the use of numerical simulations, without performing multiple test runs on real hardware.
2.3. Electrical motor modeling
The BLDC motor is considered as a torque source for the servo drive. A Faulhaber 2264W012BP4 motor have been used in the system [15]. The motor was modeled using Kirchhoff’s law, in a manner analogous to that presented in the article [7]. Thus, we have (1):
All of the coefficients are intentionally determined in relation to the motor angular velocity motor ω This approach facilitates the comparison of experimental results with the model and allows a quick assessment of each gear friction influence on the entire system dynamics. However, it requires rescaling of the coefficients or re-identification of the system if any of the gears changes.
where Umotor is the effective voltage applied on the motor, I motor is the motor current, kE is the back-EMF (electromotive force) constant, R is the phase-phase terminal resistance, L is the phase-phase terminal inductance, and motor ω is the actual motor angular velocity.
The electrical torque generated by the motor can be also described by the following equation (2):
where kM is the torque constant of the motor.
After transformation the equations mentioned above, we obtain a formula (3) for the torque generated by the motor depending on the voltage applied, its actual state and physical parameters:
2.4. Mechanical elements modeling
The mechanical friction torque of the motor was modeled using the Coulomb friction model [12]. The friction is described by two parameters, the static and dynamic coefficient (respectively C0.motor and C v motor) and has a following formula (4):
During the flight, the rocket body is subjected to varying external loads, which depend on the actual velocities and accelerations, Mach number, aeroballistic angles, canard deflection angles and (to a lesser extent) other factors [13]. A complete model of all loads acting on the ILR-33 AMBER rocket was obtained from aerodynamic analyses and flight ballistics simulations and is not the subject of this paper. For the purpose of the analyses presented here, it was assumed that only the canard hinge moment M ext has a significant influence on the control system’s dynamics. This moment, depending on the flight state, varies between 0 and ±8 Nm. For the servo drive it is a source of additional friction occurring on the components, primarily on the gearing teeth and the ball bearings. It was assumed that the additional friction value is proportional to the absolute value of the applied external torque and that it will always counteract the movement of the gears. On this basis, a formula (7) for the friction moment value was obtained:
where CM.canard is an empirically determined friction coefficient.
Once all the components of the friction torque in the system have been determined, we can obtain the formulas (8), (9) for its total value:
As it can be seen, there is a discontinuity in the friction model at 0, motor ω = corresponding to the static friction case.
There are two mechanical gearboxes in the system: a Faulhaber 26/1R planetary gearbox with a reduction ratio of iplan = 66 : 1 [16] and a custom made self-locking angular gearbox with a reduction rate of i worm = 36 : 1. They are connected in series so that the output shaft of the planetary gearbox is the input shaft of the angular gearbox. The mechanical torque resulting from the internal friction of the two gears is modeled in the same way as for the motor. Thus, we have (5), (6):
where C0, C v, and CM are determined for the whole servo drive and are the sum of all the corresponding components values.
A graphical representation of the equation is shown on Fig. 4.
Once the model is defined, mechanical system identification issue is reduced to determining the values of the coefficients C0, C v, and CM
where C0.plan, C v plan, C0.worm, and C v worm are respectively static and dynamic friction coefficients of each of the gearboxes.
Fig. 4. Assumed friction torque model of the servo drive Rys. 4. Założony model momentu tarcia serwomechanizmu
Jan Kierski, Hubert Graczyk
2.5. Equations of motion
Since the electromechanical actuator, consisting of the motor, the two gearboxes and the canard, is mechanically connected, its equations of motion must be considered together. It was decided that the equations would be solved in relation to the motor shaft, but it is also possible to define analogous equations for the intermediate shaft and the output shaft of the gearboxes, the solution of which would lead to identical results. The equations are defined based on Newton’s second law for rotational motion (10):
2.6. Model implementation
Mathematical equations were implemented in the MATLAB/ Simulink environment. The resulting model consists of a set of scripts for loading constants and initial settings and a Simulink model in which simulations are performed iteratively. A view of the Simulink model is shown in Fig. 5. In order to eliminate discontinuities in the equations and improve the stability of the numerical solution, all () sgn ω functions were replaced by () tanh. ω
3. Test stand identification
where M eqiv is the total equivalent moment on the motor shaft.
This moment can be obtained by summing all of its components, determined in previous chapters. Since all moments are determined with reference to the motor velocity, it is possible to sum them directly (11):
The control system loops were tuned to obtain optimal system dynamics and required margins of stability (which is out of scope of this paper). Then, a set of identification tests was performed with the aim to obtain unknown C0, C v, and CM coefficients and to complete the mathematical model on their basis. To perform it, a test plan was implemented, and a dedicated test bench was designed and manufactured. The test stand consists of:
The servo drive and the motion controller (as device under test);
A torque sensor AXIS FSC10 [17], with a 0 Nm to ±10 Nm range and an accuracy of ±0.5 %;
Jeqiv is the equivalent moment of inertia with reference to the motor shaft and can be calculated using the formula (12):
Each rotating component moments of inertia J are determined from manufacturers’ datasheets or their 3D CAD models. For elements located on the intermediate axis between the gearboxes and on the canard shaft, it is necessary to scale them by the squares of the corresponding gear ratios.
Knowing the motor shaft acceleration, it is possible to determine its angular velocity (13) and position (14) in time:
An adjustable friction clutch KTR Ruflex with a range from 2 Nm to 10 Nm [18];
A lab oratory power supply with voltage ranges from 0 to 50 V and current range from 0 A to 20 A; −A PC class computer for data acquisition and analysis.
The servo drive and torque sensor are mounted on a common rigid plate. A friction clutch is installed between them. This ensures that the moving system operates under a constant, continuously measured, and angular position-independent load. The angular velocity and angular position of the motor shaft are measured using a Faulhaber IE3-256 incremental encoder, integrated with the electric motor. The motor current is measured by the corresponding motion controller circuit. The data from the motion controller and torque sensor are continuously recorded using Motion Manager [19] and AXIS FM [20] software. The complete test stand is shown in Fig. 6.
Resulting values can be scaled by the gear ratios, and thus acceleration, speed and position of the canard shaft can be obtained.
A total of 54 test runs were performed for M ext torque values of 0 Nm (disconnected clutch) and from 2 Nm to 8.9 Nm (clutch connected) and motor angular velocities motor ω from 104.7 rad/s to 942.5 rad/s (1000–9000 RPM – Revolutions Per Minute). During each test, the values of () , motor t ω () , ext Mt () motor It were measured, and the corresponding motorelmotore MIk =⋅ was calculated. The steady-state part of the motion was then extruded from the data at which
in Simulink environment
Rys. 5. Widok modelu w środowisku Simulink
Fig. 5. Model view
Fig. 6. Test stand for tests with external loads
Rys. 6. Stanowisko badawcze do badań pod obciążeniem zewnętrznym
0, motor ε = when the moments Mmotor.el and Mmech are in equilibrium (Mmotor.el = Mmech). For these ranges of motion, the values obtained were averaged. An example of the measured parameters is shown in Fig. 7.
From the results analyzed this way, a relationship of (),,MMmechmotorext ω was obtained, shown in Fig. 8. The results
Fig. 7. Example of recorded data. A steady-state part is marked by a red dashed box
Rys. 7. Przykład zarejestrowanych danych. Część ustaloną oznaczono czerwoną przerywaną ramką
Fig. 8. Results obtained during the test
Rys. 8. Wyniki uzyskane podczas badań
were approximated by a surface formula 12 3 mech motor ext MaaaM ω =+⋅+⋅ The coefficients a1, a2 and a3 obtained from the approximation correspond to C0, C v, and CM and are the required result. The values obtained are shown in Table 1.
Table 1. Summary of obtained results
Tabela 1. Podsumowanie uzyskanych wyników
4. Results analysis
A summary of all the results obtained during the tests is shown in Table 1. A percentage of contribution for each factor in the total torque have been also calculated in a case of maximal load M ext = 8 Nm and maximal angular velocity 942.5rad/s.
motor ω =
As can be seen, the major influence on the load on the electric motor is caused by the external torque acting on the canard shaft. Static and dynamic moments, associated with the movement of the components themselves without load, are also a significant factor and together account for about 40 % of the total system load. Their reduction could therefore lead to an improvement of the system efficiency.
A comparison between the results of simulations and experimental bench test was then performed. For this purpose, a set of identification sequences was designed, including step signals and sine signals of various amplitudes and frequencies. The parameters of the motion controller were set identical in the simulation and in reality. The results obtained are shown in Figures 9–11.
As can be seen, the model shows remarkably high convergence with the experimental results in terms of the positions and velocities obtained. The nature of the response to the step and sine wave signal are nearly coincident. In both cases, typical phenomena can be observed, such as velocity saturation in the case of step signal and sine signals at higher frequencies, resulting in a distorted response and a ‘sawtooth’ form of the position obtained.
The value of the motor current is also modeled with a fairly good accuracy. The overall of the two curves obtained is similar. Characteristic phenomena such as a high current resulting from the acceleration of the system and an increase in the value of the current flowing with an increase in the external load are noticeable in both cases. Differences between the shape of the obtained curves may be due to phenomena not taken into account in the simulation, such as backlash, the more complex nature of real friction or differences in external torque.
The external load in the model has been adapted to correlate as well as possible with real load. In the real system, nonlinearities and torque hysteresis can be observed, which are not present in the model, but which do not significantly affect the system dynamics. An improved external torque system without hysteresis and nonlinearities is planned for future tests.
Fig. 9. Comparison between model and experiment –angular step response (5-degree amplitude) –top left: motor position, top right: motor velocity, bottom left: motor current, bottom right: external moment
Rys. 9. Porównanie między modelem i eksperymentem – wychylenie skokowe (amplituda 5 stopni) – na górze po lewej: położenie kątowe silnika, na górze po prawej: prędkość kątowa silnika, na dole po lewej: prąd na silniku, na dole po prawej: moment zewnętrzny
Fig. 10. Comparison between model and experiment – angular sine response (0.5 Hz, 4-degree amplitude) – top left: motor position, top right: motor velocity, bottom left: motor current, bottom right: external moment
Rys. 10. Porównanie między modelem i eksperymentem – wychylenie sinusoidalne (0,5 Hz, amplituda 4 stopnie) – na górze po lewej: położenie kątowe silnika, na górze po prawej: prędkość kątowa silnika, na dole po lewej: prąd na silniku, na dole po prawej: moment zewnętrzny
Fig. 11. Comparison between model and experiment – angular sine response (1.5 Hz, 4-degree amplitude) – top left: motor position, top right: motor velocity, bottom left: motor current, bottom right: external moment
Rys. 11. Porównanie między modelem i eksperymentem – wychylenie sinusoidalne (1,5 Hz, amplituda 4 stopnie) –na górze po lewej: położenie kątowe silnika, na górze po prawej: prędkość kątowa silnika, na dole po lewej: prąd na silniku, na dole po prawej: moment zewnętrzny
5. Conclusions
The mathematical model meets its requirements: it reproduces key physical characteristics of the system, such as frequency response and step response time. The model also allows to simulate the system operation without the use of real components. It is then possible to correctly adjust the settings of the control loops, to simulate the effect of physical parameters change on the system’s performance, and thus carry out optimisation of the system so that it performs in the desired way. This reduces considerably the time and cost of research and development.
The bench tests permitted to obtain valuable results using relatively inexpensive and easy to use measuring equipment. The results were then used to update the mathematical model. The model updated in this way shows high convergence with experiment for the entire operational range. This confirms the adequacy of the solutions used.
The next development step will consist of coupling the dynamics model of the control system with the flight model of the ILR-33 AMBER rocket and to perform MiL tests simulating selected flight variants. This will be followed by corresponding HiL tests using a prototype system and simulated canard shaft loads. Conducting this type of tests will demonstrate whether the correlation between the whole simulation environment and the real system is at the required level for real flight cases. This will prove whether the system meets the flight requirements regarding trajectory correction and can be qualified for flight tests.
A mechanical and electrical design update of the system is also envisaged. The prototype version of the system described above was designed at a time when detailed aerodynamic and flight analyses of the rocket dynamics had not yet been carried out. Design improvements to the system are therefore necessary due to changes in requirements and relate in particular to the required bandwidth and the aerodynamic forces involved. Despite this, the method developed and demonstrated herein is of great value for the project and will allow the work on future versions to be significantly more efficient.
Acknowledgements
The works are funded by the Łukasiewicz Research Network – Institute of Aviation. Authors are grateful for the support and wish to acknowledge the ILR-33 AMBER project team members involved in the control system development.
References
1. Cieśliński D., Noga T., Pazik A., Polish civil rockets’ development overview, Obronność RP XXI wieku w teorii i praktyce, Wydawnictwo Lotniczej Akademii Wojskowej, 2021, 61–102.
2. Pakosz M., Noga T., Kaniewski D., Okniński A., Bartkowiak B., ILR-33 AMBER rocket – quick, low cost and dedicated access to suborbital flights for small experiments, 24th ESA Symposium on European Rocket and Balloon Programmes and Related Research, Essen, 2019.
3. Noga T., Cieśliński D., Dul S., Umiński P., Dziczkaniec R., Matysek K., On the Safety of Suborbital Rocket Launches from the Polish Coast, “Safety & Defense”, Vol. 9, No. 1, 2023, 31–46, DOI: 10.37105/sd.199.
4. Kotarski A., A Concept of Suborbital Scientific Mission and Technology Validation, “Transactions on Aerospace Research”, Nr 3, 2019, 66–74, DOI: 10.2478/tar-2019-0018.
5. Ćosić K., Kopriva I., Kostić T., Slamić M., Volarević M., Design and implementation of a hardware-in-the-loop simulator for a semi-automatic guided missile system, “Simu-
lation Practice and Theory”, Vol. 7, No. 2, 1999, 107–123, DOI: 10.1016/S0928-4869(98)00027-5.
6. Kim S.H., Tahk M.-J., Lee H.-J., Kim S.-H., Experimental study on integrated servo control for canard-controlled missiles [Correspondence], “IEEE Transactions on Aerospace and Electronic Systems”, Vol. 52, No. 3, 2016, 1467–1474, DOI: 10.1109/TAES.2016.150211.
7. Gurav B., Economou J., Saddington A., Knowles K., MultiMode Electric Actuator Dynamic Modelling for Missile Fin Control, “Aerospace”, Vol. 4, No. 2, 2017. DOI: 10.3390/aerospace4020030.
8. Campa R., Torres E., Salas F., Santibáñez V., On Modeling and Parameter Estimation of Brushless DC Servoactuators for Position Control Tasks, “IFAC Proceedings Volumes”, Vol. 41, No. 2, 2008, 2312–2317, DOI: 10.3182/20080706-5-KR-1001.00390.
9. Czerwiński E., Olejnik P. Awrejcewicz J., Modeling And Parameter Identification Of Vibrations Of A Double Torsion Pendulum With Friction, “Acta Mechanica et Automatica”, Vol. 9, No. 4, 2015, 204–212, DOI: 10.1515/ama-2015-0033.
10. Skjetne R., Egeland O., Hardware-in-the-loop testing of marine control system, “Modeling”, Vol. 27, No. 4, 2006, 239–258, DOI: 10.4173/mic.2006.4.3.
11. Yong-guang L., Qin L., Design of the Test Platform of Servo System, Proceedings of the 1st International Conference on Mechanical Engineering and Material Science, 2012, 203–205, DOI: 10.2991/mems.2012.55.
12. Andersson S., Söderberg A., Björklund S., Friction models for sliding dry, boundary and mixed lubricated contacts, “Tribology International”, Vol. 40, No. 4, 2007, 580–587, DOI: 10.1016/j.triboint.2005.11.014.
13. Sahbon N., Murpani S., Michałów M., Miedziński D., Sochacki M., A CFD Study of the Aerodynamic Characteristics of Twardowsky and FOK Rockets, “Transactions on Aerospace Research”, No. 1, 2022, 35–58, DOI: 10.2478/tar-2022-0003.
Other sources
14. Faulhaber technical manual nr 7000.05048, 2019.
Modeling and Identification of Electromechanical Actuators for the ILR-33 AMBER Rocket
Modelowanie i identyfikacja siłowników elektromechanicznych do rakiety ILR-33 BURSZTYN
Streszczenie: Celem artykułu było przedstawienie metody modelowania, testowania i identyfikacji siłowników elektromechanicznych do zastosowań rakietowych. Prace przeprowadzono z użyciem prototypowego rozwiązania, zaprojektowanego do rakiety suborbitalnej ILR-33 BURSZTYN, rozwijanej przez Sieć Badawczą Łukasiewicz – Instytut Lotnictwa. Do zbudowania modelu matematycznego systemu wykorzystano zestaw zależności fizycznych, w tym prawa Kirchhoffa, prawa Newtona i nieliniowe modele tarcia. Następnie przeprowadzono badania eksperymentalne układu. Przedstawiona tu nowa metoda analizy wyników badań pozwoliła na pozyskanie brakujących danych do modelu i na uzyskanie wysokiej zbieżności pomiędzy modelem i eksperymentem nimi we wszystkich analizowanych przypadkach. Tym samym wykazano, że przedstawione tu podejście jest efektywne i użyteczne. W artykule po raz pierwszy zaprezentowano kompleksowe podejście do tematu modelowania, badania i identyfikacji tego typu siłowników. Przedstawione tu rozwiązania mogą być zaaplikowane w innych dziedzinach, w których wykorzystywane są siłowniki elektromechaniczne oraz gdzie ich poprawna identyfikacja jest konieczna do zapewnienia niezawodności i bezpieczeństwa pracy systemu. Przedstawione podejście jest proste w implementacji, a stanowiska badawcze nie wymagają kosztownego oprzyrządowania pomiarowego. Otrzymane wyniki pozwalają na stworzenie wiarygodnego modelu o racjonalnie niskim koszcie obliczeniowym.
Słowa kluczowe: rakieta suborbitalna, ILR-33 BURSZTYN, modelowanie, identyfikacja, siłownik elektromechaniczny, serwomechanizm, system sterowania
Jan Kierski, MSc Eng. jan.kierski@ilot.lukasiewicz.gov.pl
ORCID: 0000-0001-7361-6277
Received his MSc degree in aerospace engineering in 2018. Currently a PhD student at Warsaw University of Technology. Since 2014 involved in rocketry projects for education, civil and military purposes. Since 2020 working for the Lukasiewicz Research Network – Institute of Aviation and developing the ILR-33 AMBER suborbital rocket. His research interests include mechanical design, control systems design, modeling, and simulation of dynamical systems, as well as system engineering and project management activities. In his spare time, an enthusiast of athletics and cooking.
Graduated in Automation and Robotics at the Faculty of Electrical Engineering, Warsaw University of Technology, received his MSc degree in 2021. Currently employed at the Lukasiewicz Research Network - Aerospace Institute as an electronics engineer. His professional research focuses on aerospace avionics and rocket technologies. Interested in high reliability electrical devices for harsh environment applications, robotics, and autonomous vehicles. As a hobbyist, involved in the design of an electric vehicle adapted to a person with mobility disabilities.
Evaluation of RMS Current in AC Power Wires Using a High-Speed Infrared System
Błażej Torzyk, Bogusław Więcek Lodz University of Technology, Institute of Electronics, Al. Politechniki
10,
B-9 building, 93-590 Lodz, Poland
Abstract: This paper presents a new method of the effective value (RMS) of alternating current (AC) in power wires based on infrared radiation (IR) measurement using a high-speed mediumwavelength infrared (MWIR) camera. The method called “2-ω” involves measurement of the 100 Hz harmonic of temperature (T100) and is supported by signal analysis in the frequency domain. The article discusses the issue of non-sinusoidal alternating current, which causes much more difficult analyzes compared to sinusoidal current with a frequency of 50/60 Hz. The simulation and measurement results for different current shapes obtained in typical power systems like: a phase-controlled switching regulator, half-wave and full-wave rectifiers, and finally the nonlinear distortion of the AC current due to saturation of the magnetic core, are presented and confirm the linear relation of T100 ~ I2RMS. The main advantage of proposed method is the independence of the measurement results from environmental conditions.
Keywords: power wires; frequency analysis, non-sinusoidal AC current, infrared camera, radiation temperature measurement, current measurement
1. Introduction
The root mean square current (RMS) is one of the main parameters describing the electric current in electricity distribution systems. There are different methods and equipment for measuring the effective current value in a contact and non-contact manner [1–3, 29–32]. Due to the conversion of electrical energy using power converters, depending on the type of load, sinusoidal current no longer occurs [4, 5]. This significantly affects the accuracy of the measurement. Nowadays, the diverse nature of the operation of electrical equipment and the variety of electrical receivers is one of the main reasons for the need to constantly monitor the parameters and quality of generated, transmitted and processed electricity [1, 4]. Currently, there are a few standard methods for the measurement of RMS current in DC and AC power networks.
1.1. Hall-effect current sensor
Sensors using the Hall-effect are most often used, among others, to monitor the effective value of current in electric drives, automotive applications and power conversion systems [2, 3, 6]. In the Hall-effect sensor (fig. 1), under the influence of a perpendicularly incident magnetic flux, the distribution
Autor korespondujący:
Błażej Torzyk, blazej.torzyk@p.lodz.pl
Artykuł recenzowany nadesłany 22.04.2024 r., przyjęty do druku 01.07.2024 r.
of carriers changes, which generates an output Hall voltage. Technological development of semiconductors, mainly in the field of materials engineering (e.g. InSb, GaAs, InAs compounds), leads to miniaturization and cost reduction and allows for increased precision and extension of the measurement range of Hall-sensors [1, 7]. Hall-effect sensors are not the passive devices and they require a small DC external power source [8]. The output voltage of the sensor corresponds to the value of the measured current and is usually at the level of µV. Therefore, the signal requires amplification and further processing in order to reduce the measurement errors [9, 10]. Hall-effect sensor allows measuring the DC and AC current with the frequency up to fmax = 250 kHz [6]. Performing measurements in the AC domain causes difficulties resulting from fluctuations of the alternating magnetic field as a consequence of the core demagnetization. In more advanced applications, in order to
Fig. 1. The configuration of current measurement method using the Hall-effect sensor
Rys. 1. Konfiguracja metody pomiaru prądu z wykorzystaniem czujnika Halla
eliminate the measurement errors, two Hall-effect sensors can be implemented, one for static and second for dynamic measurement in the oscillating magnetic field [6].
1.2. Inductive sensor
Current transformers are typical passive elements developed to measure high current values, especially for monitoring and maintaining the supply of electricity to power systems. The operation of current transformers consists in inducing the oscillating magnetic field in a core by a current in a wire – the primary winding. In the older solutions, the power is directed to the secondary winding with a large number of turns in order to measure the voltage proportional to the current in the wire. Nowadays, current transformer subjects the signal from the secondary winding to further electronic processing as shown in fig. 2 [11].
2. The configuration of current measurement method using an inductive sensor (current transformer)
Current transformers enable the recording of alternating current over a wide range and a sufficient range of frequency values with high accuracy. Attempting to connect direct current may saturate the ferromagnetic core, which may lead to permanent damage to the transformer. A hybrid system operating in parallel with the Hall-effect (fig. 1) and an inductive sensor (fig. 2) can be used to measure both direct and alternating currents simultaneously [11, 12].
When performing periodic or operational measurements of a power system with an inductive sensor, the stiff ferromagnetic core causes difficulties. Weight, dimensions and lack of flexibility significantly hinder the use of inductive sensors. This problem can be solved by implementing the Rogowski coil (converter) –fig. 3. The main difference from a typical current transformer is the lack of a ferromagnetic core. An additional electronics amplifies the obtained voltage signal. The non-magnetic core ensures flexibility and no changes in cross-section along the entire length of the secondary winding. This solution reduces the errors of current measurement resulting from changes in
the magnetic field and the position of the tested conductor and ensures a linear character of changes of the output signal vs. the monitored current [8, 13].
Measurement capabilities of the Rogowski coils of AC can reach a range of 0.08 A – 30 kA and the frequency bandwidth of 0.1 Hz – 1 GHz [14, 33]. Additional advantages, such as low production costs and full electrical insulation from the tested conductor, make the Rogowski coil one of the most commonly used instrument for measuring alternating current today [13, 14].
1.3. Shunt resistor
A shunt resistor is an alternative solution for current measurement, mainly in terms of cost and simple implementation as presented in fig. 4. The measurement principle is based on the voltage drop on a resistor characterized by a very low resistance value – usually at the level of µΩ – mΩ [15, 17].
The obtained voltage is amplified and subjected to subsequent post-processing [15, 16]. Shunt resistors enable measurement of current values in the mA – kA range and frequencies of 10 Hz – 100 kHz [15]. Significant value of current, as well as the continuous nature of the recording with a variable load, force the shunt resistors to maintain the appropriate temperature drift, independently of time and frequency. The value of the temperature coefficient of the resistance should not exceed 0.05 – 0.62 µΩ/(Ω ⋅ K) in the full measuring range [3, 18].
The second type of shunts, so-called coaxial shunts are used in power applications to ensure proper measurement parameters at high frequency range. Such applications are only possible when using specially developed shunts with reduced parasitic inductance. The operation of this type of shunts does not change, while the size, number of elements and the level of complexity of the construction of the entire system increase proportionally to the range of measured electric current value [3, 16]. Shunts of this type can offer the GHz bandwidth, which is demanded in modern industrial and telecommunications solutions [19].
1.4. Non-sinusoidal RMS currents measurement systems
The presented methods of measuring alternating and direct currents must show significant endurance to changes in the power level and electrical nature of the load [5]. The implementation of newer solutions in power conversion systems based on modern power semiconductor devices introduce non-linear distortions, which in turn generate harmonics of the measured signal [4]. The influence of harmonics is reflected in the deterioration of the power factor (PF) [5]. Therefore, various methods of measuring the current value are used [11, 20] in order to monitor and analyze the quality of electrical energy [21, 34].
The time-varying waveform of the AC power signal requires measurement of the IRMS(tot) current, taking into account all signal components (harmonics). Measuring systems of this type, that
Fig.
Fig. 3. The Rogowski coil (converter) – working principle Rys. 3. Cewka Rogowskiego (przetwornik) – zasada działania
Fig. 4. Shunt resistor – basics of construction
Rys. 4. Rezystor bocznikowy – podstawy budowy
are used in electricity distribution systems for continuous monitoring of energy quality, are known as the Advanced Metering Infrastructure system (AMI) [22]. More and more professional and portable digital multimeters offer True-RMS, PF and THD (Total harmonic Distortion) measurements [11]. The available measurement methods focus on indirect or direct measurement of the instantaneous value of alternating current and subsequent data processing. Professional measuring equipment for the frequency f = 50 Hz of the electrical network records a sequence of 10 signal periods (in the time window t = 200 ms) in order to determine the IRMS value. Further additional averaging is then performed to meet the appropriate standards [31, 32, 34].
The article presents a measurement methodology for estimating the IRMS value of sinusoidal and non-sinusoidal alternating current using a fast infrared (IR) system. The presented experiments concern the validation of the “2-ω” method [23, 24, 25, 27, 28] for various alternating currents, such as: sinusoidal and phase-controlled currents for a switching angle of φ = 90° (e.g. implemented in a triac controller), as well as for currents in half and full-wave rectifiers. The obtained results confirm the effectiveness of the proposed method for measuring non-sinusoidal alternating current. The proposed method increases application possibilities and creates an opportunity for the development of cheap, portable IR systems for non-contact IRMS measurement in power systems.
2. Theory and methods
The current in the wire generates both power loss and temperature rise. Due to temporal changes of alternating current, the temperature also changes. If the current is not sinusoidal, the temperature signal contains harmonics. In the general case, these harmonic components are at double of the fundamental frequency because the power dissipated in the wire varies with the square of the electric current.
The proposed method is based on the non-contact IR measurement using a high-speed IR system to extract high-frequency temperature harmonics. These components have a small amplitude, because each dynamically heated thermal object behaves as an inertial thermal system that rapidly dampens high-frequency temperature signals. It can be shown that the amplitudes of the higher-order components of the temperature spectrum are of the order of 1 mK and below. This means that the special signal processing methods are needed to measure such low temperature value. Note that a typical cooled photon thermal imaging camera can directly record a temperature signal above Noise Equivalent Temperature Difference (NETD), which at best reaches 15 mK. In addition, as mentioned earlier [25], the main advantage of using high-frequency spectral components to evaluate RMS current is that they are insensitive to environmental conditions such as convective and radiation cooling, wind, solar radiation and humidity. Ultimately, from an engineering
point of view, reconstruction the current using the harmonics of temperature leads to the solution of the inverse problem. As a result, the RMS current, power loss and total harmonic distortion (THD) can be evaluated as well. The concept of the proposed method is shown in fig. 5.
2.1. Spectrum of electrical power dissipated in a wire
Consider the various shapes of power wires as shown in fig. 6. For theoretical analysis, wires can be defined as one-dimensional electrothermal objects in which the flowing current dissipates the energy causing the temperature rise.
In general, the current in the power wire is non-sinusoidal and contains various harmonic components. The power dissipated in the wire is proportional to the square of the current.
where Ii are the amplitudes of the current harmonic components, for i = 1, …, n, and mean value of current is equal to zero.
In order to analyze the temperature harmonics with an IR system, the volumetric power density pv in the wire needs to be estimated.
where: ρ – material electrical resistivity, S – cross-section area of the wire, Ii – amplitudes of harmonic components of the current.
As is well known nonlinear operations on the signals changes their frequencies and generates sometimes a very distinctive spectral pattern due to the intermodulation effect. Squaring the
Fig. 5. The concept of the proposed method
Rys. 5. Koncepcja proponowanej metody
Fig. 6. Geometries of electrical wires
Rys. 6. Geometrie przewodów elektrycznych
current doubles the harmonic frequencies. In the simple case of the 50 Hz sinusoidal current, the power and temperature spectra contain the 100 Hz component only. Using the basic trigonometric rules it is possible to obtain this harmonic components.
For non-sinusoidal currents, the spectrum of the power dissipated in the wire expands significantly. The analysis becomes more difficult due to the intermodulation effect caused by the square of the current. In consequence, the multiplications of harmonic signals with different amplitudes and phases generates the additional differential and summation components of the temperature spectrum. For different current harmonic contents, there are different configurations of the power and temperature spectra, as shown in table 1.
For example, for the very typical case of two odd spectral components, the power spectrum of i2(t) signal can be represented by second, fourth and sixth components as shown in equation (4):
where h is the convective heat transfer coefficient, c v is the volumetric thermal capacity, r is the radius of the cylindrical wire, t s is the thickness and H is the height of the flat wire.
Since the thermal system is linear for a small range of temperature changes at high frequency, for a sinusoidal power excitation with the angular frequency ω, the temperature is also sinusoidal.
For typical thermal parameters of a power wire made of steel or copper and similar cooling condition, for ω > 2 π 50 1/s, the following relations are valid:
2.2. Thermal impedance
A power line can be assumed to be a piece of metal with a volume dV = S·dx and a dissipated power density pv. The energy balance equation for both geometries shown in fig. 7 can be expressed as:
Table 1. Harmonic orders of current vs. power and temperature
Tabela 1. Rzędy harmonicznych prądu w funkcji mocy i temperatury
Harmonic order
Current11, 31, 3, 51, 2, 3, 4
Power and temperature 22, 4, 6 2, 4, 6, 8, 10 1, 2, 3, 4, 5, 6, 7, 8
In result, regardless of the power wire geometry, the temperature oscillates with the same angular frequency ω and phase delay approximately equal to -π/2
Finally, the thermal impedance takes a form:
Table 2. Thermal impedance values for chosen frequencies for different wires
Tabela 2. Wartości impedancji cieplnej dla wybranych częstotliwości dla różnych przewodów
The simple thermal model presented above can lead to important conclusions. First, the thermal impedance for frequencies f > 50 Hz is purely capacitive and consequently varies inversely with frequency as in equation (9).
Assume the analysis for a cylindrical and flat wires made of cooper and steel with the following parameters: c v = 3.5·106 J/m3K, h = 10 W/m2K, H = 0.03 m, r = 0.0006 m, t s = 0.005 m and dV = 1 m3. Simulated exemplary results for Zth are summarized in table 2.
Analyzing the values of thermal impedance in table 2 obtained using physical and geometrical parameters of the wire, it possible to notice that e.g. for the cooper wire, for f = 100 Hz, Re{Zth} = 0.0905 ∙ 10-14 K/W and Im{Zth} = –0.4681 ∙ 10-9 K/W. In consequence, tg(Im/Re) ≈ –0.5 106 and corresponding arg{Zth} = –89.999°.
Simple modelling of the thermal impedance of the wire Zth(jω) leads to practical conclusions helpful in the measurement of temperature, power and current. The ratio of the 100 and 200 Hz amplitudes for temperature is two times greater than the same ratio for the power and i 2(t) signals. In addition, due to the highly capacitive nature of the thermal system, for f ≥ 50 Hz, there is a –π/2 phase delay between temperature and power for high-frequency spectral components. All these conclusions simplify the reconstruction of the RMS value of the current from the high-frequency range of temperature spectrum.
2.3. Temperature spectrum and current harmonics reconstruction
As mentioned above, due to the highly capacitive thermal structure of the power wire for the frequency f ≥ 50 Hz, the phase shift between temperature and power is very close to –π/2. In addition, increasing the frequency proportionally reduces the imaginary part and modulus of thermal impedance.
As an example, consider the current consisting of the fundamental and 3rd harmonics only. According to the table 1 and equation (4), the amplitudes of the harmonic components of temperature can be represented as:
Although the system of equations (11)–(13) is overdetermined (6 equations with 4 unknowns), it is better to choose the first 2 of them (11) and (12), because the values of temperature harmonics amplitudes Ti decrease rapidly with frequency. Moreover, the functions fi are implicit with respect to harmonic amplitudes and phases. As a result, an optimization must be applied to obtain a solution to the posed inverse problem. Finally, the RMS value of the current can be calculated classically as:
for i = 2, 4, 6, i.e. for f = {100, 200, 300} Hz, where functions fi take the forms:
The proposed method also allows to determine the THD factor for the current. It should be emphasized that the coefficient
can be treated as a calibration parameter. In practice, the calibration should be carried out experimentally for each power wire independently.
2.4. Approximated evaluation of the RMS value of non-sinusoidal current
As mentioned above, the RMS current evaluation method is suitable for sinusoidal current. Again, it should be noted that the temperature harmonics for f > 50 Hz are below the noise level of any IR system and decrease rapidly with frequency. For non-sinusoidal current, the need to take into account higher temperature harmonics causes errors. Moreover, in the general case, the current, power and temperature spectra are infinite and obviously cannot be measured by any IR system.
For this reason, an approximate solution is proposed. It requires calibration for each RMS current measurement configuration. The approach is based on the observation that the RMS value of non-sinusoidal current varies with the square root of the temperature harmonics and in many practical cases, this relationship is linear. The idea is to use the lower-order spectral component of temperature to evaluate the RMS current. It is recommended to use the 100 Hz temperature harmonic component T100. One should not use the 50 Hz component (if exists) due to the effect of power line electromagnetic fields on high-impedance electronics of IR system and the ubiquitous 50 Hz noise in mains-powered systems.
Consider 3 parameters, only one of which changes in each simulation test: the current scaling factor γ, the phase φ0 of the selected harmonic component varying in the range (0, π), and the ratio of the amplitudes of the selected components, e.g. I1 and I3
Using (9) and (10), the non-linear system of implicit equations (11)–(13) can be solved with respect to the unknowns I1, I
where T0 = φ0/ω and f(t) is the series of harmonic components of the temperature spectrum with different and varying amplitudes.
In order to confirm the linear dependence between RMS current and 100 Hz harmonic of i2(t) signal which directly corresponds to T(t), the simulations were performed for six different non-sinusoidal currents i(t).
The calculations were carried out for the current consisting of the first two odd harmonics i(t) = sin(2πft)+0.2sin(3 2πft+φ0), the current generated by the half-wave and full-wave rectifiers,
the current obtained from the triac power driver with the switching angle of π/2, the current supplied by the transformer with magnetic core saturation and the current from an overdriven circuit – fig. 7.
As shown in fig. 8, the analysis confirmed the linearity of the relationship between the square of RMS current and the square of 100 Hz harmonic. It has to be underlined that there are some special cases when 100 Hz harmonic does not exist in the temperature spectrum or it can be relatively low. Moreover, for square wave AC current, no even single harmonic of temperature occurs. From the power point of view, the square wave current behaves as DC current.
The results of simulations of the relationships of RMS current versus square root of 100 Hz harmonic amplitude of i2(t) for current consisting of 1st and 3rd harmonics only, with varying amplitude of the 3rd one, are presented in fig. 9. Scaling the current level i(t) by the factor γ changes both the RMS value and 100 Hz harmonic of i2(t) signal. As expected, this relationship is linear, and also passes through the origin of the coordinate system. In practice, this means that a single measurement is sufficient to calibrate the IR system.
Subsequent calculations were carried out for the current consisting of two first odd harmonics i(t) = sin(2πft) + 0.2sin(3·2πft+φ0), where the phase of the third harmonic varied in the range () 0 0,.ϕπ ∈ The results confirmed the full independence of the 100 Hz component from this phase.
Fig. 7. Different non-sinusoidal currents: (a) i(t) = sin(2πft) + 0.2sin(3·2πft), (b) generated by the half-wave and (c) full-wave rectifiers, (d) obtained from the triac power driver with the switching angle of 90°, (e) supplied by the transformer with magnetic core saturation and (f) from the overdriven circuit
Rys. 7. Różne prądy niesinusoidalne: (a) i(t) = sin(2πft) + 0,2sin(3·2πft), (b) generowane przez prostowniki jednopołówkowe i (c) dwupołówkowe, (d) otrzymywane w układzie fazowego sterownia mocą z triakiem dla kąta załączenia 90°, (e) w układzie z transformatorem z nasyceniem rdzenia magnetycznego oraz (f) z obwodu przesterowanego
The last and certainly no less important results show the influence of the ratio of the amplitudes of the fundamental and the 3rd harmonic of the considered current. This case seems to be the most important from the point of view of measurement uncertainty with the proposed method. In this case, the amplitude of the 3rd harmonic increases to 20 % of the amplitude of the fundamental harmonic. The result presented in fig. 9 shows that the RMS value of the current deviates from the value for the sinusoidal current by about 2 % only.
Fig. 9. RMS current value vs. square root of 100 Hz harmonic amplitude for i 2(t), i(t) = sin(2πft) + γsin(3 2πft), f = 50 Hz, 0.02 ≤ γ ≤ 0.2
Rys. 9. Wartość skuteczna prądu w funkcji pierwiastka kwadratowego amplitudy harmonicznej 100 Hz dla i2 (t), i(t) = sin(2πft) + γsin(3 2πft), f = 50 Hz, 0.02 ≤ γ ≤ 0.2
Uncertainty analysis has already been performed experimentally for a very similar wire in a wind tunnel [25]. The total uncertainty was estimated at ∼100 µK. As mentioned earlier, the “2-ω” method requires calibration for each measurement session. Since the uncertainty analysis depends on the IR camera used, it is worth performing it independently for each case.
3. Measurement results
3.1. Experimental setups
Fig. 8. The square of RMS current value vs. square of 100 Hz harmonic amplitude for i 2(t) for different currents and THD
Rys. 8. Kwadrat wartości skutecznej prądu w funkcji kwadratu amplitudy harmonicznej 100 Hz dla i2(t), dla różnych prądów i THD
Figure 10 presents the block diagram of the experimental set-up. The aim of the experiment was to verify the T100 thermal response of the tested steel wire (1) with 1.25 mm cross section diameter, for different types of AC current signals (2): (a) double-sinusoidal, (b) phase-controlled with 90° switching angle (triac driver – BTA41), (c) half-wave rectification (diode
Fig. 10. The block diagram of the experimental set-up
Rys. 10. Schemat blokowy układu doświadczalnego
STTH1512D), (d) full-wave rectification (rectification bridge VS-GBPC2512W). Power was supplied by an isolated power source – NDN AFC-110 (3). The RMS value of alternating current, regardless the type of the AC current signal were in the range of 2.41–6.52 A. The electrical parameters and the quality of electrical power supplied to the load (4), with resistance R = 8 Ω were recorded using the Sonel PQM-707 power quality analyzer (5) and AC current probe AmpFlex A110 (6) coupled with 14 bit acquisition system (7) that was used to record signals on a PC (8) at the sampling frequency f s = 10 kHz with total number of N = 128 000 samples.
Changes in temperature values were monitored and recorded using a Cedip-Titanium (9), the high-speed Middle Wavelength IR (MWIR) thermal camera with 640 × 512 InSb cooled detector. The IR camera (9) coupled to 2PC (10) recorded temperature changes within 180 seconds, with a frequency of 870 Hz. Data acquisition was carried out using dedicated software on 2PC (10). Figure 12 presents the actual test stand prepared for testing.
Initially the possibility of using an extension ring for steel wire image magnification was taken into account [26], however the preliminary measurement experiments showed that at minimum focusing distance, the camera with its lens offered the better spatial resolution than 100 µm per pixel, thus finally no extension ring was added.
The registration and measurement of image sequences using high-speed IR systems (fig. 11), were carried out 3 times for different current values, and then they were averaged and processed using high-pass and notch digital filter tuned for 100 Hz.
3.2. Signal processing of measured temperature
The harmonics of temperature signal are lower than the noise of the IR system. This means that special signal processing methods must be used to detect and measure the sub-noise signals. Typically, the amplitude of the 100 Hz harmonic is less than 1 mK, while the lowest NETD of today’s cameras is equal at most to 15 mK. The proposed and experimentally verified algorithm of RMS current measurement is presented in fig. 13.
First, the DC and low-frequency part of the temperature spectrum is removed by a high-pass (HP) filter. In this study, a Butterworth Infinite Impulse Response (IIR) filter
Fig. 11. Processing of image sequences using a high-speed IR systems Cedip-Titanium MWIR cooled camera
Rys. 11. Procedura przetwarzania sekwencji obrazów przy użyciu chłodzonej kamery Cedip-Titanium MWIR
Fig 12. The actual testbench measuring of RMS current value measurement (AC)
Rys. 12. Rzeczywisty stanowisko pomiaru wartości skutecznej prądu (AC)
with a cut-off frequency fc = 70 Hz was implemented in the MATLAB environment. Depending on the IR system used, 50 Hz noise with its derivatives may mask the temperature signal emitted by the wires. Additional filtering with cascade notch filters is recommended to reduce the influence of 50 Hz noise. It is good practice to reduce the noise in the signal by measuring the temperature synchronously with the 50 Hz current, but this is not always possible. Incidentally, this solution suffers from an additional signal to be connected, as a result of which the method can no longer be remote and contactless.
In the next step of the proposed method, the Discrete Fourier transform (DFT) is used to obtain the temperature spectrum. Due to the rapid attenuation of temperature signals with increasing frequency and the limited sensitivity of modern IR systems, at most a 6th order harmonic (300 Hz)
Fig. 13. Proposed signal processing algorithm for IRMS current evaluation from the high-frequency spectrum of temperature
Rys. 13. Algorytm przetwarzania sygnału do wyznaczania wartości IRMS na podstawie widma temperatury
can be detected. This is the main reason why the best solution for RMS current measurement is to use only the 100 Hz temperature harmonic. For the sinusoidal current, this is the only harmonic that exists. For non-sinusoidal current, the monotonic correlation of the 100 Hz harmonic amplitude with the RMS value is helpful. Fortunately, such a correlation occurs for many differently deformed currents.
3.3. Experimental results and discussion
The laboratory experiment begins with a comparison of the temperature frequency spectra in the (100–300) Hz range for a steel wire with a diameter of 1.25 mm for sinusoidal and non-sinusoidal current. The current was supplied by a phase-controlled switching power regulator using a triac. In both measurements, the same current amplitude of about 9 A was settled. The switching-on-phase was either very close to 0° or 90°. For full-time closing of the semiconductor relay, the average wire temperature measured with a thermal imaging camera was 72.15 °C, and for the switching phase 90° it dropped down to 53.04 °C. The measurement lasted 180 seconds.
Figure 14a shows the temporal temperature for a sinusoidal current recorded by the camera after removing the average value. After applying an HP filter with a cutoff frequency of fc = 70 Hz, the temperature signal looks like noise with a variable amplitude reaching a maximum of about 6 mK – fig. 14b. Stretching this signal to tens of ms reveals oscillations with a period of about 10 ms (f = 100 Hz) – fig. 14c.
The results presented in fig. 15, confirm the correctness of the proposed solution for non-contact measurement of effective current using IR thermography. As expected, the spectrum of a 50 Hz sinusoidal current contains a single harmonic at
Rys. 16. Zależności I2 RMS = f(T100) dla różnych przebiegów prądu: (a) sinusoidalny, (b) w układzie sterowania fazowego dla kąta załączania φ = 90° (sterownik z triakiem), (c) prostownika jednopołówkowego, (d) prostownika dwupołówkowy
Fig. 14. Temperature signal registered by: (a) the sensitive thermal camera – (b) after mean value removal and (c) after HP filtering (f c = 70 Hz, 3rd-order Butterworth IIR filter) Rys. 14. Sygnał temperatury zarejestrowany przez: (a) czułą kamerę termowizyjną – (b) po usunięciu wartości średniej i (c) po filtracji wysokich częstotliwości (f c = 70 Hz, filtr Butterworth 3-go rzędu – filtr IIR)
Fig. 15. Spectra of temperature signal for: (a) sinusoidal and (b) π/2 phase switching current
Rys. 15. Widma sygnału temperatury dla prądu: (a) sinusoidalnego i (b) niesinusoidalnego w układzie sterowania fazowego dla kąta załączania π/2
100 Hz. In theory, the temperature spectrum of the π/2 phase-controlled current has an infinite number of odd-frequency components. As seen in fig. 15, the amplitude of the 200 Hz component is ¼ of the amplitude of 100 Hz harmonic. According to the frequency dependence of the thermal impedance of a wire (table 2), the temperature decreases with frequency. To restore the level of the 200 Hz harmonic of i2(t), it must be scaled up by a factor of 2. As a result, the 200 Hz harmonic of the i2(t) signal is half of the 100 Hz harmonic. It fits the theory perfectly.
The final results presented in fig. 16 show the relationship between the RMS value of non-sinusoidal currents and the 100 Hz temp erature harmonic for various current shapes and harmonic content. They all show a linear relationship I2 RMS ~ T100
4. Conclusions
The results of the research presented in the article confirmed the effectiveness of the “2-ω” method for measurement of RMS value of AC non-sinusoidal currents. This means that this method is of practical importance for non-contact measurement of effective current using an IR system. This is an indirect approach of electrical parameters’ estimation by measuring the 100 Hz temperature harmonic using a sensitive and fast IR technique. The main advantage of using the “2-ω” method is the reliable measurement of the temperature component with a frequency of 100 Hz, regardless of environmental conditions [25]. This is all due to high-frequency temperature measurement and the capacitive nature of the thermal body, which in our case is an energy wire.
On the other hand, a possible disadvantage of the described method is the very weak measured temperature signal, usually of the order of 1 mK, while the noise level of a modern IR photon camera defined by NETD is about 15 mK. This means that advanced signal and image processing must be used to extract the temperature signal from the noise.
We confirmed theoretically and experimentally the linear relationship between the square of the RMS value of the non-sinusoidal current and the amplitude of the 100 Hz temperature harmonic. The value of the measured temperature signal strongly depends on both the frequency and the heat capacity of the measured object. The same technique can be used in countries having the f = 60 Hz system for the public electricity grid. This means that calibration is always needed. Thanks to this, after calibration, the measurement is simple, non-contact, fast and reliable – independent from the environmental conditions. The use of an IR camera together with the developed “2-ω” method allows for monitoring and measurement of electrical parameters of a high voltage power line in real time. Investigation can be performed from the ground with an appropriate infrared telescope lens significantly reducing danger during measurement. It is important to emphasize that no imaging system is needed to measure or continuously monitor temperature of an object. It is possible to use cheap, lightweight and inexpensive infrared device with a single detector. Due to the higher sensitivity, it is recommended to use a cooled photon IR system, not the one that is very popular today with a bolometer sensor. Thanks to this, such a system can be easily installed, for example, on an unmanned aircraft. Development of a cheap IR system based on the “2-ω” method for measurement of RMS value of AC currents is the scope of future research.
Acknowledgments
This research was funded by Inkubator Innowacyjności 4.0, grant number, MNISW/2020/326/DIR.
Bibliography
1. Karsenty A., A Comprehensive Review of Integrated Hall Effects in Macro-, Micro-, Nanoscales, and Quantum Devices. “Sensors”, Vol. 20, No. 15, 2020, DOI: 10.3390/s20154163.
2. Zhang Z., Leggate D., Matsuo T., Industrial Inverter Current Sensing with three shunt resistors: Limitations and Solutions. “IEEE Transactions on Power Electronics”, 2017, 4577–4586. DOI: 10.1109/TPEL.2016.2596778.
3. Ouameur M., Ziadé F., Le Bihan Y., Toward a calculable standard shunt for current measurement at 10 A and up to 1 MHz. “IEEE Transactions on Instrumentation and Measurement”, Vol. 68, No. 6, 2019, 2215–2222, DOI: 10.1109/TIM.2018.2884553.
4. El-Goharey H.S.K., Mamdouh W.M., On-line analysis of power quality problems in non-sinusoidal/non-linear distribution systems. “Ain Shams Engineering Journal”, Vol. 14, No. 9, 2023, DOI: 10.1016/j.asej.2023.102266.
5. Monteiro F.P., Monteiro S.A., Tostes M.E., Bezerra U.H., Using True RMS Current Measurements to Estimate Harmonic Impacts of Multiple Nonlinear Loads in Electric Distribution Grids. “Energies”, Vol. 12, No. 21, 2019, DOI: 10.3390/en12214132.
6. Crescentini M., Syeda S.F., Gibiino G.P., Hall-Effect Current Sensors: Principles of Operation and Implementation Techniques. “IEEE Sensors Journal”, Vol. 22, No. 11, 2022, 10137–10151, DOI: 10.1109/JSEN.2021.3119766.
7. Kadri S., Applications of InAs Hall Effect Sensor. “Sensors and Transducers Journal”, Vol. 119, No. 8, 2010, 22–29
8. Silventoinen P., Kuisma M., Review on the Current Measurement systems in Power Electronics. International Conference on Efficient Welding in Industrial Applications (ICEWIA), Lappeenranta, Finland, 1999.
9. Lalwani A.V., Yalamarthy A.S., Alpert H.S., Holiday M., Eisner S.R., Chapin C.A., Senesky D.G., Hall-Effect Sensor Technique for No Induced Voltage in AC Magnetic Field Measurements Without Current Spinning. “IEEE Sensors Journal”, Vol. 22, No. 2, 2022, 1245–1251, DOI:10.1109/JSEN.2021.3130527.
10. Liu J., Sanli A.S., Wang Y., Liu Ch., Error Compensation of closed Loop Hall Effect Current Sensors. IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Germany, Aachen, September 26–28, 2012.
11. Flores-Arias J.-M., Ortiz-Lopez M., Latorre F.J.Q., Bellido-Outeiriño F.J., Moreno-Muñoz A., A Memory-Efficient True-RMS Estimator in a Limited-Resources Hardware “Energies”, Vol. 12, No. 9, 2019, DOI: 10.3390/en12091699.
12. Wang K., Yang X., Li H., Wang L., A High-Bandwidth Integrated Current Measurement for Detecting Switching Current of Fast GaN Devices. “IEEE Transactions on Power Electronics”, Vol. 33, No. 7, 2018, 6199–6210, DOI: 10.1109/TPEL.2017.2749249.
13. Nanyan A.N., Isa M., Hamid H.A., Rohani M.N.K.H., Ismail B., The Rogowski Coil Sensor in High Current Application: A Review. IOP Conference Series Materials Science and Engineering. 2018, Vol. 318, DOI: 10.1088/1757-899X/318/1/012054.
14. Samini M.H., Mahari A., Farahnakin M.A., Mohseni H., The Rogowski Coil Principles and Applications: A Review “IEEE Sensors Journal”, Vol. 15, No. 2, 2014, 651–658, DOI: 10.1109/JSEN.2014.2362940.
15. Kato H., Saito M., Takahashi Y., Yoshino K., Domae A., Kiryu S., Nobu-Hisa K., Development and Evaluation of a Simple Shunt Module for High DC Current Measurement “IEEE Transactions on Power Delivery”, Vol. 38, No. 3, 2023, 1656–1664, DOI: 10.1109/TPWRD.2022.3224072.
16. Voljc B., Lindic M., Lapuh R., Direct Measurement of AC Current by Measuring the Voltage Drop on the Coaxial Current Shunt. “IEEE Transactions on Instrumentation and Measurement”, Vol. 58, No. 4, 2009, 863–867, DOI: 10.1109/TIM.2008.2007074.
17. Pogliano U., Bosco G.C., Serazio D., Coaxial Shunts as AC-DC Transfer Standards of Current. “IEEE Transactions on Instrumentation and Measurement”, Vol. 58, No. 4, 2009, 872–877, DOI: 10.1109/TIM.2008.2008469.
18. Malinowski M., Kubiczek K., Kampik M., A precision coaxial current shunt for current AC-DC transfer. “Measurement”, Vol. 176, 2021, DOI: 10.1016/j.measurement.2021.109126.
19. Shillab er L., Jiang Y., Ran L., Long T., Ultrafast Current Shunt (UFCS): A Gigahertz Bandwidth Ultra Low Inductance Current Sensor. “IEEE Transactions on Power Electronics”, Vol. 37, No. 12, 2022, 15493–15504, DOI: 10.1109/TPEL.2022.3184638.
20. Sydenham P.H., Thorn R., Handbook of Measuring System Design, Chapter: 202 Current Measurement, 3 Volume Set, 1st Edition, Wiley, 2005, DOI: 10.1002/0471497398.mm320.
21. Silva J.I., Sousa V., Sarmiento P., Gómez J.R, Viego P.R., Quispe E.C., Effects of power electronics devices on the Energy quality of an administrative building. “International Journal of Power Electronics and Drive Systems”, Vol. 10, No. 4, 2019, 1951–1960, DOI: 10.11591/ijpeds.v10.i4.pp1951–1960.
22. Mohassel R.R., Fung A., Mohammadi F., Raahemifar K., A survey on Advanced Metering Infrastructure. “International Journal of Electrical Power and Energy Systems”, Vol. 63, 2014, 473–484. DOI: 10.1016/j.ijepes.2014.06.025.
23. Torzyk B., Więcek B., A method of RMS current measurement especially in low and medium voltage power lines and cable. Polish patent submission. No. 428676, 2019.
24. Torzyk B., Więcek B., Measurement of High-Frequency sub-noise temperature signal and RMS current using a single-detector high-speed IR system. “Pomiary Automatyka Robotyka”, Vol. 27, No. 4, 2023. 53–56, DOI: 10.14313/PAR_250/53.
25. Torzyk B., Więcek B., Second-Harmonic Contactless Method for Measurement of RMS Current using a standard Infrared Camera. “IEEE Transactions on Instrumentation and Measurement”, Vol. 70, 2021, DOI: 10.1109/TIM.2021.3077676.
26. Kałuża M., Hatzopoulos A., Application of extension rings in thermography for electronic circuits imaging. “Quantitative InfraRed Thermography Journal”, Vol. 21, 2024, 50–68, DOI: 10.1080/17686733.2022.2146419.
Other sources
27. Torzyk B., Więcek B., Method of measuring the effective value of current, in particul air in power cables and wires of LV and MV Networks. Silver Medal for the Invention, 2022 Kaohsiung International Invention & Design EXPO 1–3 December, 2022 Kaohsiung, Taiwan.
28. Torzyk B., Więcek B., Methode de mesure de la valeur effective du courant. Silver Medal for the Invention. Geneva inventions, Geneva, 28.04.2023.
29. AEC – Q200: Stress Test Qualification for Passive Components, Automotive Electronics Council Component Technical Committee, 2023
30. IEC 61000-4-7:2002 Electromagnetic compatibility (EMC) – Part 4–7: Testing and measurement techniques – General guide on harmonics and interharmonics measurement and
instrumentation, for power supply systems and equipment connected thereto.
31. IEC 61000-4-30:2015 Electromagnetic compatibility (EMC) – Part 4–30: Testing and measurement techniques – Power quality measurement methods.
32. IATF 16949:2016 Quality management system for organizations in the automotive industry, International Automotive Task Force (IATF) standard.
34. IEEE. Standard for Harmonic Control in Electric Power Systems, IEEE Std 519-2022 (Revision of IEEE Std 5192014), 1–31, 5 Aug. 2022, DOI: 10.1109/IEEESTD.2022.9848440.
Błażej Torzyk, Bogusław Więcek
Ewaluacja wartości
skutecznej RMS
prądu przemiennego w przewodach elektroenergetycznych z wykorzystaniem radiacyjnego pomiaru temperatury
systemami IR
Streszczenie: Artykuł przedstawia nową metodę pomiaru wartości skutecznej (RMS) prądu przemiennego (AC) w przewodach elektroenergetycznych w oparciu o pomiar promieniowania podczerwonego (IR) za pomocą szybkiej kamery IR, o średniej długości fali (MWIR). Metoda zwana „2-ω”, polega na pomiarze harmonicznej temperatury 100 Hz (T100) i analizie sygnału w dziedzinie częstotliwości. W artykule poruszono problematykę niesinusoidalnego prądu przemiennego, który powoduje znacznie trudniejsze analizy w porównaniu z prądem sinusoidalnym o częstotliwości 50/60 Hz. Wyniki symulacji i pomiarów dla różnych kształtów prądu uzyskanych w typowych układach elektroenergetycznych, takich jak: regulator przełączający – sterowany fazowo, prostowniki jednopołówkowe i dwupołówkowe, oraz nieliniowe odkształcenie prądu przemiennego na skutek nasycenia rdzenia magnetycznego, przedstawiono i potwierdzono liniową zależność T100 ~ I2RMS. Główną zaletą proponowanej metody jest niezależność wyników pomiarów od warunków środowiskowych.
He received BSc degree in Electronics and Telecommunication at Technical University of Lodz in 2013 and the MSc degree in Electrical Engineering, specialization Electric Power Engineering in 2015. Currently he is a PhD student at the Electronic Circuits and Thermography Department of Lodz University of Technology. His research interests lie in the fields IR thermography at power electronics systems and devices.
Prof. Bogusław Więcek, PhD DSc
boguslaw.wiecek@p.lodz.pl
ORCID: 0000-0002-5003-1687
Bogusław Więcek is the head of Electronic Circuit and Thermography Division in the Institute of Electronics where he has been working for more than 40 years. His scientific interests are: heat transfer modelling, industrial and biomedical applications of IR thermography and IR system modelling and developments. He is responsible for organizing the largest conference on thermography in Central and Easter Europe every two years “Infrared thermography and thermometry – TTP”.
Porównanie metod sterowania adaptacyjnego dla stołu balansującego kulą
Marcin Mateusz Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski Politechnika Poznańska, Wydział Automatyki Robotyki i Elektrotechniki, ul. Piotrowo 3a, 60-965 Poznań
Streszczenie: Celem artykułu jest przedstawienie i porównanie działania dwóch algorytmów sterowania adaptacyjnego: z identyfikacją parametrów modelu MIAC (Model Identification Adaptive Control) oraz z modelem odniesienia MRAC (Model Reference Adaptive Control). Zaproponowano modyfikacje, które w szczególnych przypadkach mogą poprawić jakość regulacji. Wykorzystano stanowisko laboratoryjne stołu balansującego kulą BBT (ball balancing table), które jest przykładem systemu „kula na blacie”. Problematyka balansowania takiego systemu może mieć istotne znaczenie w kontekście prac nad stabilizacją łodzi lub drona. W artykule przedstawiono nieliniowy model obiektu oraz jego liniowe przybliżenie w otoczeniu punktu pracy, a także opisano proces identyfikacji parametrów z użyciem rekursywnej metody najmniejszych kwadratów RLS (Recursive Least Square). W ramach analizy porównawczej dokonano oceny zastosowanych algorytmów regulacji, MIAC i MRAC, podczas stanów przejściowych oraz w stanie ustalonym. W celu analizy porównawczej wykorzystano wskaźniki jakości, takie jak koszt sterowania i całkowy wskaźnik z wartości bezwzględnej uchybu. W wynikach badań pokazano możliwości zarówno pośredniej, jak i bezpośredniej adaptacji nastaw regulatora, w zależności od wykorzystanej metody. Zostały wykazane zalety porównywanych algorytmów oraz ich modyfikacje pozwalające poprawić działanie układu w szczególnych przypadkach. Zastosowane metody adaptacyjne pozwoliły uodpornić układ na błędy modelowania (brak znajomości parametrów) czy inne wewnętrzne zaburzenia.
Słowa kluczowe: sterowanie adaptacyjne, MRAC, MIAC, stół balansujący kulą, RLS
1. Wprowadzenie
W znacznej większości rzeczywistych układów regulacji automatycznej stosowane są regulatory PID [1–3], które zwykle zapewniają akceptowalną jakość regulacji. Istnieje wiele metod doboru nastaw regulatora, a niektóre wymagają dokładnej znajomości modelu, zaś przeprowadzana w tym celu identyfikacja może być kosztowna obliczeniowo i czasochłonna [4]. Trzeba pamiętać, że wszystkie modele matematyczne są obarczone pewnymi błędami wiążącymi się z przyjęciem niewystarczająco elastycznej struktury bądź złym dopasowaniem wartości parametrów. Aby ułatwić tworzenie modelu przyjmuje się założenia upraszczające, np. linearyzację nieliniowych części modelu w otoczeniu punktu pracy [5]. Również sam proces modelowania ma pewne ograniczenia, które mogą prowadzić do otrzymania modelu, który nie odwzorowuje rzeczy-
Autor korespondujący:
Marcin Mateusz Czajka, czajka.m.marcin@gmail.com
Artykuł recenzowany nadesłany 17.07.2023 r., przyjęty do druku 27.12.2023 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
wistego obiektu. Ograniczenia te mogą być związane z brakiem znajomości dokładnych wartości wielkości fizycznych (masy, momentu bezwładności czy współczynnika tarcia wiskotycznego [6]). Ponadto trudnością może być matematyczny opis zjawisk fizycznych lub chemicznych związanych z danym procesem. Przykładem takiego procesu jest mieszanie się gazów w warunkach złożowych [7]. Przy wykorzystaniu konwencjonalnego regulatora PID dla obiektu nieliniowego, układ byłby dobrze sterowany tylko w otoczeniu punktu pracy, dla którego powstał model liniowy. W przypadku niedokładności modelowania lub zmienności w czasie parametrów, można wykorzystać sterowanie adaptacyjne. Wpływ różnic występujących między modelem a obiektem rzeczywistym jest niwelowany dzięki ciągłej adaptacji parametrów regulatora. Różnice te mogą wynikać, np. ze zmiany obciążenia podczas podniesienia przedmiotu przez ramię manipulatora [8] lub z oblodzenia drona [9]. W przypadku sterowania adaptacyjnego z identyfikacją modelu, możliwa jest również kompensacja zjawiska windup [10]. Algorytm sterowania adaptacyjnego z modelem referencyjnym jest znany od lat 50. XX wieku, kiedy próbowano utworzyć z jego pomocą system sterowania lotem dla samolotów [11–14]. Około 10 lat później została zaproponowana modyfikacja wykorzystująca stabilność Lapunowa, aby niepoprawny dobór współczynników nie prowadził do utraty stabilności układu zamkniętego [15, 16]. Na przełomie XX i XXI wieku
zaproponowano wykorzystanie sieci neuronowych w tej metodzie sterowania [17, 18].
Podczas przygotowania artykułu wykorzystano stanowisko BBT [19]. Inna przykładowa konstrukcja systemu typu „kula na blacie” została przedstawiona w [20]. Badane na takich stanowiskach zjawisko balansowania jest wykorzystywane m.in. przy projektowaniu algorytmów kompensacji fal na okrętach morskich [21], jak i w systemach bezpiecznego lądowania dronów [22]. Pozwalają one na testowanie różnych metod sterowania, m.in. z wykorzystaniem sprzężenia od stanu [23], różnych wariantów MRAC [24] lub algorytmu sterowania predykcyjnego MPC (ang. Model Predictive Control) [25]. Ponadto, w [26] pokazano, jak klasyczny regulator PID został zastąpiony regulatorem Fuzzy–PID opartym na filtrze Kalmana, który przyczynił się do redukcji zakłóceń pochodzących z czujników. W pracy zostały szczegółowo porównane dwa algorytmy adaptacyjnej regulacji dla obiektu BBT. Przedstawiono prawa sterowania oraz adaptacji dla metod MIAC oraz MRAC, wraz z propozycjami ich modyfikacji mogącymi poprawić jakość działania układu. Według najlepszej wiedzy autorów jest to pierwsza praca z kompleksową analizą porównawczą przedstawionych metod i ich modyfikacji. W sekcji 2 omówione zostały wykorzystane algorytmy regulacji. Opis obiektu wraz z warunkami oraz wynikami eksperymentów przedstawiono w sekcji 3. Podsumowanie znajduje się w sekcji 4.
2. Algorytmy regulacji
2.1. Regulacja PID
W konwencjonalnych układach regulacji, zwłaszcza w zastosowaniach przemysłowych, popularne jest stosowanie regulatora PID. Sygnał sterujący u jest sumą trzech składowych pochodzących z torów regulacji: proporcjonalnego, całkującego i różniczkowego. Transmitancję regulatora G r(s) można przedstawić wzorem [1] () () () , i r pd Us k Gskks s Es ==++ (1)
gdzie U(s) i E(s) to transformaty Laplace’a sygnału sterującego u(t) i uchybu regulacji e(t), a k p, ki i kd są kolejno wzmocnieniami członów proporcjonalnego, całkującego i różniczkującego. Należy zauważyć, że idealne różniczkowanie w transmitancji regulatora PID (1) nie jest realizowalne fizycznie. W praktyce stosuje się dodatkowo filtrację inercyjną sygnału uchybu w torze różniczkującym.
Transmitancję operatorową układu zamkniętego G z(s ) z regulatorem o transmitancji G r(s) oraz obiektem o transmitancji G(s) opisuje równanie () () () ()() ()() , 1 r z rr YsGsGs Gs YsGsGs == + (2)
w którym Y(s) oraz Y r(s) to transformaty Laplace’a, odpowiednio, sygnału wyjściowego obiektu oraz sygnału referencyjnego. Wielomian charakterystyczny M(s) można wyznaczyć przez uporządkowanie równania
()() 1 0. r GsGs += (3)
Jednym ze sposobów syntezy nastaw regulatora jest metoda lokowania biegunów [1], która została wykorzystana w dalszych rozważaniach. Zgodnie z tą metodą należy przyrównać współczynniki powstałego wielomianu charakterystycznego
dla układu zamkniętego (3) z pewnym wielomianem zadanym Md(s) wybranym przez projektanta
()()n d Mss ω =+ (4)
Ze względu na ograniczenia wynikające z modelu obiektu oraz algorytmu PID, nie zawsze istnieje możliwość ulokowania wszystkich biegunów. Może istnieć potrzeba przyjęcia pewnych założeń upraszczających, jak np. pomijanie biegunów niedominujących, czy aproksymacja modelem niższego rzędu [27].
2.2. Sterowanie adaptacyjne z identyfikacją parametrów
Sterowanie metodą lokowania biegunów opisane w części 2.1. wymaga dokładnej znajomości modelu obiektu. W przypadku braku takich informacji, możliwa jest również identyfikacja parametrów modelu równolegle z regulacją i aktualizacją nastaw regulatora na jej podstawie. W tej pracy autorzy wykorzystali rekursywną metodę najmniejszych kwadratów – RLS. Do jej opisu służą następujące równania [4]
gdzie P(i) jest macierzą kowariancyjną estymat parametrów w i-tej iteracji, () () ()() () ()() T 1 nm iyiyiuiui = ϕ jest wektorem regresji złożonym z próbek sygnału wyjściowego y i sterującego u oraz ich pochodnych, y(j)(i) oznacza próbkę j-tej pochodnej sygnału ciągłego z i-tego kroku dyskretnego, k(i) to wektor wzmocnienia korekcyjnego, ε (i) jest błędem równaniowym, y(n)(i) to n-ta pochodna sygnału wyjściowego, a ()()()()() 00 T 1 ˆ nm iaiaibibi = p jest estymowanym wektorem parametrów.
Należy pamiętać, że wraz ze wzrostem numeru iteracji elementy macierzy kowariancyjnej P dążą do 0, a estymator traci zdolność adaptacji parametrów ˆ p . Ten problem jest szczególnie istotny w przypadku obiektów o parametrach zmiennych w czasie. Jednym z rozwiązań może być resetowanie macierzy kowariancyjnej P w przypadku spełnienia określonych warunków lub zastosowanie współczynnika zapominania () 0;1 λ ∈ i mo dyfikacja równania (5) do postaci
(9)
W każdej iteracji aktualizowane są estymaty parametrów obiektu regulacji () ˆ i p Oblicza się też wtedy nastawy regulatora, aby na podstawie wyznaczonych parametrów zapewniały wielomian charakterystyczny układu zgodny z zaprojektowanym wielomianem Md(s) (4).
W przypadku identyfikacji modelu czasu ciągłego, gdy nie ma możliwości pomiaru pochodnych sygnałów, można zasto-
Marcin Mateusz Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
sować filtr zmiennej stanu SVF (ang. State Variable Filter). Dostępne pomiarowo próbki przetwarza się przy pomocy transmitancji
() () , 1 j n f s Fs sT = + (10)
otrzymując odpowiednie pochodne rzędów j = {1, ..., n}. Rząd filtru n nie może być niższy niż rząd dynamiki systemu, a dobór stałej czasowej Tf należy do projektanta. Zasady doboru stałej czasowej Tf i rozwiązania innych problemów związanych z identyfikacją modeli czasu ciągłego na podstawie próbkowanych danych przedstawiono w [28].
2.3. Sterowanie adaptacyjne z modelem odniesienia
W przypadku algorytmu MRAC, oprócz klasycznego sprzężenia zwrotnego, rozważana jest pętla, której zadaniem jest minimalizacja przyjętego wskaźnika jakości stanowiącego funkcję błędu między wyjściem pomiarowym y(t) i odpowiedzią ym(t) modelu referencyjnego, który opisuje transmitancja
Prawo adaptacji dane jest równaniem [29] , J
(12)
gdzie γ jest wektorem współczynników intensywności adaptacji, natomiast θ stanowi wektor parametrów regulatora. Dobór wartości γ zależy od decyzji projektanta i wymaga kompromisu między szybkością reakcji układu a wielkością przeregulowania. Dla zwiększenia przejrzystości zapisu jawna zależność od czasu nie jest zapisywana wprost.
W przypadku reguły MIT [29] (nazwa odnosi się do ośrodka Massachusetts Institute of Technology, w którym metoda została opracowana), funkcja celu J przyjmuje postać () 2 1 , 2 m J θε = (13)
gdzie m ε oznacza błąd modelowania, wyznaczany z zależności
mm yy ε =− (14)
Podstawiając równanie (13) do (12) otrzymuje się prawo adaptacji dla reguły MIT
Pętla zewnętrzna
PRAWO ADAPTACJI nastawy regulatora
REGULATOR OBIEKT
Pętla wewnętrzna
Rys. 1. Schemat ogólny sterowania adaptacyjnego
Fig. 1. General diagram of an adaptive control system
(15)
Stąd, p odstawiając (14) do równania (15) i zakładając adaptacją pewnego nieznanego wzmocnienia k skalującego obiekt G(s) o znanej transmitancji, otrzymuje się prawo adaptacji wzmocnienia regulatora
mm y θγε =− (16)
W takim przypadku przyjmuje się sygnał sterujący dany równaniem [29] . uyr θ = (17)
Reguła MIT w klasycznej p ostaci, należąca do metod gradientowych, może doprowadzić do utraty stabilności układu, jeśli projektant nie uwzględni zewnętrznego zakłócenia, bądź założy stałość parametrów zmiennych w czasie. Kolejną przyczyną utraty stabilności może być ograniczenie wartości wzmocnienia ,γ które zależy od poziomu sygnału referencyjnego [29]. Ograniczenie to może powodować trudności w jednoznacznym określeniu zakresu wartości, dla których układ jest stabilny. W celu uniknięcia destabilizacji przy dużych wartościach sygnału zadanego, można wykorzystać znormalizowaną wersję reguły MIT [30], dla której prawo adaptacji wyrażone jest równaniem
gdzie m α zostało wprowadzone, aby uniknąć dzielenia przez bardzo małe wartości, gdy y θ
Alternatywnym podejściem, pozwalającym na zapewnienie stabilności układu, jest zastosowanie metody Lapunowa, tzn. dobranie prawa sterowania w taki sposób, żeby pochodna proponowanej funkcji była ujemnie określona. Przykłady konstrukcji funkcji Lapunowa opisano w [16] oraz [31]. W przypadku drugiej z nich wykorzystano regulator PD (o dwóch stopniach swobody) z funkcją Lapunowa, dla którego sygnał sterujący u można przedstawić za pomocą wzoru
Dla błędu zdefiniowanego w równaniu (14), wykorzystanie funkcji Lapunowa daje prawo adaptacji (15) w postaci następujących równań [32]:
3. Eksperyment
Stanowisko BBT składa się z metalowej kulki, ekranu dotykowego i dwóch serwomechanizmów (uproszczony schemat przedstawiono na rys. 2). Stół jest podparty w centralnym punkcie, a serwomechanizmy są przymocowane do środków krawędzi. Taka konstrukcja daje dwa stopnie swobody ruchu (2 DoF).
Rys. 2. Schemat ideowy układu; uwzględniono ruch tylko w osi y Fig. 2. Schematic diagram of the system; the limitation to the y axis only was assumed 2 I mymg r α
Do sterowania stanowiskiem służy mikrokontroler Arduino, który w czasie rzeczywistym łączy się z uruchomionym na komputerze środowiskiem MATLAB/Simulink. Umożliwia to wyświetlanie w czasie rzeczywistym wykresów i zapisywanie w postaci wektorów wartości poszczególnych sygnałów występujących w układzie. Podczas każdego uruchamiania eksperymentu model w środowisku Simulink jest automatycznie kompilowany i wgrywany na mikrokontroler Arduino, a ten ostatni jest odpowiedzialny za regulację położenia kulki.
3.1. Model matematyczny obiektu Przy tworzeniu modelu matematycznego przyjęto następujące założenia:
− sygnałem wejściowym obiektu jest wartość kąta nachylenia ekranu ,α
− pominięto oddziaływanie siły tarcia,
− przyjęto, że metalowa kulka jest bryłą sztywną o kształcie idealnej kuli,
− rozpatrywany jest jedynie ruch wzdłuż stołu – osi y
Mimo potencjalnych możliwości stanowiska laboratoryjnego, zrezygnowano z regulacji położenia w dwóch kierunkach (na płaszczyźnie). Ze względu na możliwość odsprzęgnięcia układów regulujących położenie kulki uznano, że podejście jednowymiarowe jest wystarczające do celów analizy jakości regulacji wybranych algorytmów. Ponadto zmniejszenie wymaganej mocy obliczeniowej jest istotne w przypadku implementacji zaawansowanych metod sterowania na mikrokontrolerze o ograniczonych zasobach.
Na podstawie równań Lagrange’a można zapisać dynamikę metalowej kulki za pomocą wzoru [33]
2 sin0, I mymg r α +−= (23)
gdzie m oznacza masę kuli, r to promień kuli, I stanowi moment bezwładności kuli, g to przyspieszenie grawitacyjne, a α to kąt nachylenia osi y względem poziomu. Przy linearyzacji założono, że dla niewielkich wartości kąta α zachodzi sin, αα ≈ wówczas równanie (23) można przekształcić do postaci
(24)
Na podstawie (24) utworzono model blatu Gst, dla którego wejściem jest kąt nachylenia blatu ,α a wyjściem położenie kulki na osi y
Otrzymano mo del podwójnie całkujący o wzmocnieniu 2 2 2 st mgmgr k I mrI m r == + +
Do opisu dynamiki pozycji kątowej orczyka serwomechanizmu można posłużyć się członem inercyjnym o jednostkowym wzmocnieniu wyrażonym jako
1 , 1 s Gs sT = + (26)
gdzie T jest stałą czasową serwomechanizmu.
W opisie matematycznym obiektu należy również uwzględnić wzmocnienie k r, które jest stosunkiem długości ramienia serwomechanizmu r m do odległości między punktem podparcia stołu, a jego brzegiem m r y r k l = (27)
Transmitancję obiektu Gob(s) złożonego z serwomechanizmu, który zmienia kąt nachylenia stołu i toczącej się kulki można opisać wzorem (28)
gdzie k = kstkr oznacza wzmocnienie obiektu. Transmitancją układu zamkniętego (2), złożonego z obiektu oraz regulatora PD (równanie (1) dla ki = 0), jest zatem
() 32 dp z dp kkskk Gs Tsskkskk + = +++ (29)
W procesie syntezy układu regulacji założono, że stała czasowa serwomechanizmu T ma pomijalnie małą wartość i tym samym można zredukować rząd modelu układu do drugiego. Przeprowadzone testy symulacyjne potwierdziły słuszność takiego uproszczenia na potrzeby syntezy układu regulacji, dlatego w dalszych eksperymentach przyjmowano model o zredukowanym rzędzie.
Marcin Mateusz Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
3.2. Warunki eksperymentu
Podczas eksperymentów jako sygnał referencyjny yr przyjęto sygnał prostokątny o okresie 16 s oraz amplitudzie 75 mm względem środka stołu. Położeniem początkowym była pozycja na skraju ekranu y(0) = −150 mm, a okres próbkowania wynosił T p = 0,01 s.
Na brzegu stanowiska zamontowana jest banda, która ogranicza położenie kulki do zakresu ±150 mm. Programowe ograniczenia sygnału sterującego pozwalają na wychylenia orczyka serwonapędu w zakresie od −45° do +45°. W przypadku sterowania adaptacyjnego z ciągłą identyfikacją parametrów obiektu przyjęto na potrzeby zadania identyfikacji model o transmitancji danej wzorem
() () 2 , id b Gs ssa = + (30)
który jest przekształconą formą równania (28). Parametry a i b estymowano za pomocą metody RLS z wykorzystaniem filtru SVF o stałej czasowej Tf = 8T p = 0,08 s, a wektor regresji miał postać T . yu =− ϕ
Jako model odniesienia dla układu regulacji przyjęto człon oscylacyjny o transmitancji () 2 0 22 00 , 2 osc osc k Gs ss ω ξωω = ++ (31)
gdzie k osc oznacza wzmocnienie, ξ względny współczynnik tłumienia, natomiast 0ω to pulsacja graniczna.
Wykorzystując podstawienie k = b/a wynikające z przyrównania (30) i (28), dla T → 0, wzory na parametry regulatora przyjmują postać:
Do zestawienia różnic między wynikami dla poszczególnych eksperymentów wykorzystano całkowy wskaźnik z wartości bezwzględnej uchybu IIAE (ang. Integral Absolute Error Index) opisany wzorem
0 IAE , tend t Ietdt = ∫ (34)
gdzie t0 jest czasem rozpoczęcia eksperymentu, a tend momentem jego zakończenia.
Drugim zastosowanym wskaźnikiem jest koszt sterowania J, który dany jest równaniem
() 0 2 tend t Jutdt = ∫ (35)
W przypadku eksp erymentów z wykorzystaniem algorytmu MIAC wskaźniki obliczono jedynie dla drugiego okresu sygnału zadanego, ponieważ zastosowano modyfikację, która w początkowej fazie eksperymentu bazowała na konwencjonalnym regulatorze PD. Natomiast dla metody MRAC realizowano pomiary od początku pierwszego okresu sygnału referencyjnego do końca jego drugiego okresu.
3.4. Wyniki eksperymentu
Na stanowisku BBT przeprowadzono serię eksperymentów mających na celu odtwarzanie przez pozycję kulki prostokątnego sygnału zadanego. Otrzymane wyniki przedstawiono w tabeli 1 oraz na rysunkach 3–7. W przypadku wszystkich eksperymentów wykorzystano jednakowe współczynniki wielomianu charakterystycznego układu zamkniętego i wynosiły odpowiednio: k osc = 1, 1 ξ = oraz 0 3. ω =
Dla eksperymentu, którego wyniki przedstawiono na rys. 3 wykorzystano algorytm MIAC z warunkami początkowymi () () T 22 03100,0, × = = p PI gdzie I2×2 jest macierzą jednostkową o wymiarach 2 × 2. Do identyfikacji zastosowano pozycję kulki pomniejszoną o wartość początkową yid = y − y(0), aby dla położenia początkowego y(0) = −150 mm uzyskać wartość 0.
Tab. 1. Wskaźniki jakości dla danych zebranych podczas eksperymentów (w przypadku algorytmu MIAC wskaźniki zostały obliczone jedynie dla drugiego okresu sygnału zadanego, a we wskaźnikach dla MRAC uwzględniono dane z obu okresów)
Tab 1. Quality indexes for data collected during experiments (when MIAC algorithm was used indexes were calculated only for second period of reference signal, for MRAC indexes consider data from both periods)
051015202530
Rys. 3. Przebiegi sygnałów dla sterowania adaptacyjnego z identyfikacją modelu (MIAC), przyjmując warunki początkowe
Fig. 3: Signal waveforms for Model Identification Adaptive Control for initial conditions
051015202530 t[s]
051015202530 t[s]
Rys. 4. Przebiegi sygnałów dla sterowania adaptacyjnego z identyfikacją modelu (MIAC) z początkową zmianą położenia, przyjmując warunki początkowe
Fig. 4. Signal waveforms for Model Identification Adaptive Control with initial position correction, for initial conditions
Rys. 5. Przebiegi sygnałów dla sterowania adaptacyjnego z modelem odniesienia (MRAC) dla parametru γ = 0.00005
Fig. 5. Signal waveforms for Model Reference Adaptive Control for the value of the parameter γ = 0.00005
Marcin Mateusz Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
051015202530 t[s]
051015202530 t[s]
051015202530 t[s]
051015202530 t[s]
W kolejnym eksperymencie została zaimplementowana modyfikacja regulatora, w której przez pierwsze 10 sekund regulator PID o stałych nastawach doprowadza kulkę do pozycji środkowej. Po 10 sekundach estymowane parametry i macierz kowariancyjna zostają zresetowane do wartości () T ˆ 0390 = p oraz () 22 0, × = PI a w dalszej części eksperymentu wykonuje się normalnie algorytm MIAC. Początkowe odsunięcie od krawędzi stanowiska zapewniło prawidłową identyfikację parametrów, również w przypadku, gdy w pierwszej fazie ruch odbywał się w nieodpowiednim kierunku. Wyniki tego eksperymentu przedstawiono na rys. 4. Przebiegi położenia kulki w obu przypadkach były zbliżone. Nie występowały znaczne przeregulowania, ale występował uchyb ustalony. Całkowe wskaźniki jakości jedynie nieznacznie się różniły. Koszt sterowania J był wyższy, kiedy zastosowano modyfikację, niż w przypadku, kiedy nie nastąpiła początkowa zmiana położenia, natomiast wskaźnik IIAE przyjmował mniejszą wartość po zastosowaniu modyfikacji. W chwili zakończenia pierwszego eksperymentu estymowane wzmocnienie obiektu wynosiło k1 = 32,67, a w drugim przypadku k2 = 31,03, więc również tutaj nie występuje znaczna różnica. Estymowane war-
Rys. 6. Przebiegi sygnałów dla sterowania adaptacyjnego z modelem odniesienia (MRAC) z normalizacją dla wartości parametrów γ = 0.85, α m = 100
Fig. 6. Signal waveforms for Normalized Model Reference Adaptive Control for the values of the parameters γ = 0.85, α m = 100
Rys. 7. Przebiegi sygnałów dla sterowania adaptacyjnego z zastosowaniem metody Lapunowa dla wartości parametrów γ = [0.00001 0.00001 0.00001]T
Fig. 7. Signal waveforms for Adaptive control the Lyapunov-based model reference for the values of the parameters γ = [0.00001 0.00001 0.00001]T
tości zostały wykorzystane jako nastawy początkowe dla sterowania MRAC.
W celu sprawdzenia jakości regulacji dla algorytmów sterowania z modelem odniesienia przygotowano trzy eksperymenty: wykorzystujący regułę MIT z adaptacją wzmocnienia według wzoru (15), znormalizowaną regułę MIT opisaną równaniem (18) oraz z regulatorem PD o dwóch stopniach swobody. Ten ostatni bazował na funkcji Lapunowa, a sygnał sterujący przedstawiono w (19). Ze względu na niezerowe warunki początkowe, w każdym przypadku do mierzonego położenia kulki dodano 150 mm, aby wymusić zerowy warunek początkowy zgodnie z warunkiem dla odpowiedzi modelu odniesienia.
Na rys. 5 przedstawiono przebiegi sygnałów uzyskane podczas eksperymentu z wykorzystaniem klasycznego algorytmu MRAC z parametrem 0,00005 γ = i wartością początkową wzmocnienia ()01. θ = Dla eksperymentu ze sterowaniem adaptacyjnym, wykorzystującym model odniesienia z normalizacją przyjęto wartość początkową wzmocnienia ()01 θ = oraz parametry 0,85 γ = i 100 m α = – rezultaty przedstawiono na rys. 6. W trzecim eksperymencie wykorzystano metodę Lapunowa o parametrach T 0,000010,000010,00001, γ = a zadane
warunki początkowe to () T 00,40,40,2, = θ a zmierzone sygnały przedstawiono na rys. 7. Nastawy parametrów γ były dobierane ręcznie, aby zapewnić stabilne działanie układu oraz adaptację wzmocnienia θ przy możliwie szybkim i łagodnym osiągnięciu zadanej pozycji.
Dla każdego eksperymentu ze sterowaniem typu MRAC widoczne są oscylacje w przebiegu położenia. Oscylacje te mają największą amplitudę i najdłuższy czas ustalania w przypadku wykorzystania metody Lapunowa. W rezultacie obliczony wskaźnik jakości IIAE dla tych testów miał największą wartość. Jednak połączenie MRAC z metodą Lapunowa umożliwiło uzyskanie najmniejszego kosztu sterowania J, choć równoczesna adaptacja trzech parametrów jest bardziej wymagająca obliczeniowo. W przypadku eksperymentu z zastosowaniem algorytmu MRAC z normalizacją, wskaźnik IIAE został zredukowany w porównaniu do MRAC z metodą Lapunowa, ale koszt sterowania J był większy. Najwyższy koszt sterowania J uzyskano dla klasycznego algorytmu MRAC, a całkowy wskaźnik IIAE miał wartość między MRAC z normalizacją i MRAC z metodą Lapunowa.
Dużą zaletą metody MRAC jest możliwość wyzerowania uchybu ustalonego dzięki bezpośredniej adaptacji parametrów regulatora na podstawie błędu chwilowego (14). Algorytm z identyfikacją parametrów zapewnia z kolei brak znacznych przeregulowań w odpowiedzi obiektu, znacznie niższy koszt sterowania J oraz możliwość estymacji fizycznych parametrów obiektu.
4. Podsumowanie
Zarówno sterowanie adaptacyjne MIAC, jak i MRAC, pozwoliły na skuteczną regulację położenia kulki na stanowisku BBT bez dokładnej początkowej znajomości parametrów obiektu. Algorytm z identyfikacją parametrów obiektu umożliwia estymację parametrów fizycznych, ale nie kompensuje zakłóceń wewnętrznych, a te w rezultacie powodują powstanie uchybu ustalonego. Wykorzystanie przedstawionej w artykule modyfikacji, polegającej na zmianie położenia początkowego, stanowi zabezpieczenie dla procesu identyfikacji na wypadek początkowego ruchu kulki w nieodpowiednim kierunku. Zastosowanie sterowania z modelem odniesienia pozwala na zniwelowanie uchybu, jednak nie ma dostępu wprost do fizycznych parametrów obiektu. Wykorzystanie zaproponowanej w pracy modyfikacji, polegającej na wymuszeniu zerowych warunków początkowych, pozwala uogólnić rozważania niezależnie od rzeczywistej wartości początkowej. Opisane wersje MRAC nie umożliwiają regulacji w przypadku zerowej wartości sygnału referencyjnego, a na sterowanie algorytmem MIAC nie miałoby to wpływu. Zaimplementowanie algorytmów MRAC z normalizacją oraz z metodą Lapunowa umożliwiło uzyskanie niższego kosztu sterowania niż w przypadku podstawowej wersji algorytmu sterowania adaptacyjnego z modelem referencyjnym. Kluczowe w przypadku wyboru rodzaju sterowania jest rozważenie wymagań stawianych przed projektowanym układem regulacji.
Planowana jest kontynuacja prac nad algorytmami sterowania i utworzenie w przyszłości układu regulacji, w którym jednocześnie wykorzystane będzie sterowanie MRAC i MIAC. Połączenie takie powinno zapewnić dostęp do fizycznych parametrów obiektu, akceptowalny stan przejściowy i zerowy uchyb ustalony. Rozważa się również wykorzystanie dodatkowo estymacji stanu w celu poprawy informacji pomiarowej.
Bibliografia
1. Åström K.J., Hägglund T., Advanced PID control. ISA-The Instrumentation, Systems and Automation Society, 2006.
2. Keppler M., Raschel C., Wandinger D., Stemmer A., Ott C., Robust stabilization of elastic joint robots by ESP and PID control: theory and experiments. “IEEE Robotics and Automation Letters”, Vol. 7, No. 3, 2022, 8283–8290, DOI: 10.1109/LRA.2022.3187277.
3. Zhao J., Quadrotor’s modeling and control system design based on PID control. “Journal of Physics: Conference Series”, Vol. 2483, 2023, DOI: 10.1088/1742-6596/2483/1/012034.
4. Michałek M.M., Wprowadzenie do identyfikacji systemów Wydawnictwo Politechniki Poznańskiej, 2023.
5. Asghari M., Fathollahi-Fard A.M., Mirzapour Al-E-Hashem S., Dulebenets M.A., Transformation and linearization techniques in optimization: A state-of-the-art survey, “Mathematics”, Vol. 10, No. 2, 2022, DOI: 10.3390/math10020283.
6. Pazderski D., Patelski R., Krysiak B., Kozłowski K., Analysis of an impact of inertia parameter in active disturbance rejection control structures, “Electronics”, Vol. 9, No. 11, 2020, DOI: 10.3390/electronics9111801.
7. Szott W., Gołąbek A., Symulacyjne modelowanie procesów mieszania się gazów w warunkach złożowych, “Nafta-Gaz”, Vol. 70, No. 3, 2014, 151–161.
8. Zhang D., Wei B., A review on model reference adaptive control of robotic manipulators, “Annual Reviews in Control”, Vol. 43, 2017, 188–198, DOI: 10.1016/j.arcontrol.2017.02.002.
9. Li Y., Cheng L., Yuan J., Ai J., Dong Y., Neural Network and Dynamic Inversion Based Adaptive Control for a HALE-UAV against Icing Effects, “Drones”, Vol. 7, No. 4, 2023, DOI: 10.3390/drones7040273.
10. Horla D., Sterowanie adaptacyjne: ćwiczenia laboratoryjne Wydawnictwo Politechniki Poznańskiej, 2019.
11. Åström K.J., Theory and applications of adaptive control, “IFAC Proceedings Volumes”, Vol. 14, No. 2, 1981, 737–748, DOI: 10.1016/S1474-6670(17)63572-9.
12. Landau I., Lozano R., M’Saad M., Karimi A., Adaptive Control: Algorithms, Analysis and Applications. Springer London, 2011, DOI: 10.1007/978-0-85729-664-1.
13. Nguyen N., Model-Reference Adaptive Control: A Primer Springer International Publishing, 2018, DOI: 10.1007/978-3-319-56393-0.
14. Whitaker H., Yamron J., Kezer A., Design of Model Reference Adaptive Control Systems for Aircraft. Report Massachusetts Institute of Technology Instrumentation Laboratory R, 1958.
15. Costa R.R., Hsu L., Imai A.K., Kokotovic P., Lyapunov-based adaptive control of MIMO systems, “Automatica”, Vol. 39, No. 7, 2003, 1251–1257, DOI: 10.1016/S0005-1098(03)00085-2.
17. Bahita M., Belarbi K., Model reference neural-fuzzy adaptive control of the concentration in a chemical reactor (CSTR), “IFAC-PapersOnLine”, Vol. 49, No. 29, 2016, 158–162, DOI: 10.1016/j.ifacol.2016.11.093.
18. Wang Y., Li A., Yang S., Li Q., Ma Z., A neural network based MRAC scheme with application to an autonomous nonlinear rotorcraft in the presence of input saturation, “ISA Transactions”, Vol. 115, 2021, 1–11, DOI: 10.1016/j.isatra.2021.01. 003.
19. The Basics of the Bal l Balancing Table [https://acrome.net/post/ the-basics-of-the-ball-balancing-table].
20. Awtar S., Bernard C., Boklund N., Master A., Ueda D., Craig K., Mechatronic design of a ball-on-plate balancing system, “Mechatronics”, Vol. 12, No. 2, 2002, 217–228, DOI: 10.1016/S0957-4158(01)00062-9.
21. Zhang H., Design of Control System for Submarine Receiving and Playing Based on Fuzzy Control. “IOP Conference Series: Materials Science and Engineering”, Vol. 569, 2019, DOI: 10.1088/1757-899X/569/3/032017.
22. Zhen Z., Tao G., Yu C., Xue Y., A multivariable adaptive control scheme for automatic carrier landing of UAV, “Aerospace Science and Technology”, Vol. 92, 2019, 714–721, DOI: 10.1016/j.ast.2019.06.030.
23. Radi S.K., Faraj Y.A., Amsad Y., Theoretical design of a ball balancing on plate controller, “Journal of Engineering and Sustainable Development”, Vol. 12, No. 4, 2008, 93–114.
24. Mani G., Sivaraman N., Kannan R., Visual Servoing Based Model Reference Adaptive Control with Lyapunov Rule for a Ball on Plate Balancing System, [In:] 2018 International Conference on Intelligent and Advanced System (ICIAS), IEEE, DOI: 10.1109/ICIAS.2018.8540635.
25. Zarzycki K., Ławryńczuk M., Fast real-time model predictive control for a ball-on-plate process, “Sensors”, Vol. 21, No. 12, 2021, DOI: 10.3390/s21123959.
26. Hamdoun M., Ab dallah M.B., Ayadi M., Rotella F., Zambettakis I., Functional observer-based feedback controller for
27. Kurek J., Aproksymacja modelem inercyjnym I rzędu z opóźnieniem układu inercyjnego n-tego rzędu, „Pomiary Automatyka Robotyka”, Vol. 14, No. 11, 2010, 49–51.
28. Garnier H., Mensler M., Richard A., Continuous-time model identification from sampled data: implementation issues and performance evaluation, “International Journal of Control”, Vol. 76, No. 13, 2003, 1337–1357, DOI: 10.1080/0020717031000149636.
29. Åström K.J., Wittenmark B., Adaptive Control Second Edition. Dover Books on Electrical Engineering. Dover Publications, 2013.
30. Rothe J., Zevering J., Strohmeier M., Montenegro S., A modified model reference adaptive controller (M-MRAC) using an updated MIT-rule for the altitude of a UAV. “Electronics”, Vol. 9, No. 7, 2020, DOI: 10.3390/electronics9071104.
31. Radziszewski B., Stabilność ruchu, Mechanika Techniczna t. 2. (15–102), Komitet Mechaniki PAN, 2005.
32. Nasar A., Jaffar N.E., Kochummen S.A., Lyapunov rule based model reference adaptive controller designs for steam turbine speed, “International Journal of Electrical Engineering and Technology”, Vol. 6, No. 7, 2015, 13–22.
33. Spacek L., Bobal V., Vojtesek J., Digital control of Ball & Plate model using LQ controller, [In:] 21st International Conference on Process Control (PC), 2017, 36–41, DOI: 10.1109/PC.2017.7976185.
A Comparison of Adaptive Control Methods for the Ball Balancing Table System
Abstract: The purpose of this paper is to present and compare adaptive control algorithms: Model Identification Adaptive Control (MIAC) and Model Reference Adaptive Control (MRAC), with their modifications that allow to improve quality of control in specific cases. The ball balancing (BBT) table physical stand, which is an example of a ball on plate system, was used, and the balancing problem that occurs could potentially lead to work on stabilizing a boat or a drone. This paper presents a non-linear model of the object and its linear approximation in the vicinity of the operating point, additionally demonstrating the process of parameters identification with the Recursive Least Square (RLS) method. The quality of the adaptive control algorithms was compared during transients and in steady state. The research showed the possibilities of both indirect and direct adaptation of the controller parameters, depending on the selected method. Quality indices, such as the cost of control and the integral of absolute error, were utilized for the comparative analysis. The advantages of the compared algorithms and their modifications, that can enhance the system performance in special cases, were also demonstrated. The tested adaptive control algorithms made the system robust to modeling errors (lack of knowledge of parameters) or other internal disturbances.
Marcin Mateusz Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
inż. Marcin Mateusz Czajka czajka.m.marcin@gmail.com
ORCID: 0009-0006-1617-0719
Student drugiego stopnia Automatyki i Robotyki na Politechnice Poznańskiej. Wśród zainteresowań naukowych znajduje się zastosowanie teorii sterowania oraz szeroko pojętego uczenia maszynowego w robotyce, a w szczególności przypadki z wykorzystaniem danych z systemów wizyjnych.
mgr inż. Jacek Michalski jacek.michalski@put.poznan.pl
ORCID: 0000-0002-1666-7331
Asystent badawczo-dydaktyczny na Politechnice Poznańskiej. Zainteresowania naukowe obejmują estymację stanu obiektów (liniowych i nieliniowych), przede wszystkim metodami filtru Kalmana oraz filtru cząsteczkowego. Obszarem zainteresowań są też zaawansowane metody sterowania adaptacyjnego i odpornego z identyfikacją parametrów obiektu lub estymacją stanu – w szczególności sterowanie ADRC.
Studentka drugiego stopnia Automatyki i Robotyki na Politechnice Poznańskiej. Zainteresowania naukowe obejmują zagadnienia związane z wykorzystaniem metod uczenia maszynowego i systemów wizyjnych w robotyce.
dr inż. Robert Bączyk robert.baczyk@put.poznan.pl
ORCID: 0000-0001-9450-8216
Adiunkt w Politechnice Poznańskiej. Zainteresowania naukowe obejmują szeroko pojętą teorię sterowania oraz wizję komputerową. W szczególności obszarem zainteresowań jest niepewność pomiaru w systemach wizyjnych i systemy SLAM wykorzystujące filtr Kalmana i kamerę jako sensor.
mgr inż. Piotr Kozierski piotr.kozierski@gmail.com
ORCID: 0000-0001-8777-6132
Asystent na Politechnice Poznańskiej. Główne obszary zainteresowań to odporna estymacja stanu obiektów, z naciskiem na metody filtru cząsteczkowego oraz obiekty typu sieciowego.
Optymalizacja mieszanego odczytu zmiennych
binarnych i rejestrowych w protokole Modbus ze sterownika PLC implementującego CPDev
Dariusz Rzońca, Andrzej Bożek Politechnika Rzeszowska, Katedra Informatyki i Automatyki, ul. W. Pola 2, 35-959 Rzeszów
Streszczenie: Wydajna komunikacja jest kluczowa dla poprawnej pracy rozproszonych systemów automatyki. W artykule skupiono się na jednym z aspektów takiej komunikacji, związanym z mieszanym odczytem zmiennych binarnych i rejestrowych ze sterownika PLC w protokole Modbus RTU. W badaniach przyjęto architekturę pamięci ze wspólną adresacją zmiennych różnych typów, pozwalającą na użycie do odczytu zmiennych binarnych oprócz dedykowanych funkcji bitowych (np. FC1), także funkcji rejestrowych Modbus (np. FC3). Architektura taka występuje m.in. w sterownikach implementujących środowisko inżynierskie CPDev. W artykule zaproponowano metodę grupowania zmiennych, prowadzącą do zmniejszenia łącznego czasu cyklu komunikacyjnego. Zaimplementowano model optymalizacyjny pozwalający na automatyczne znalezienie optymalnego grupowania. Przeprowadzono eksperymenty, a następnie omówiono uzyskane wyniki. Rezultaty przeprowadzonych badań zostaną wykorzystane przy rozwoju środowiska inżynierskiego CPDev.
Słowa kluczowe: sterownik przemysłowy, PLC, komunikacja, Modbus, CPDev
1. Wprowadzenie
Wymiana danych w rozproszonych systemach sterowania nierzadko stanowi wąskie gardło ograniczające wydajność całego systemu. Niniejszy artykuł poświęcony jest problematyce optymalizacji odczytu zmiennych różnych typów (binarnych i rejestrowych) ze sterownika PLC (ang. Programmable Logic Controller ) lub PAC (ang. Programmable Automation Controller ) pracującego pod kontrolą pakietu inżynierskiego CPDev. Specyficzna architektura pamięci maszyny wirtualnej CPDev i typowe funkcje zaimplementowane w protokole Modbus niejednokrotnie pozwalają na odczyt żądanych zmiennych na różne sposoby. Wybór optymalnego rozwiązania należy do projektanta, w podjęciu decyzji może go wspierać oprogramowanie obliczające łączny czas cyklu komunikacyjnego w konkretnym przypadku. Oprogramowanie takie może bazować na rezultatach badań przedstawionych w artykule. Bezpośrednią motywacją do przeanalizowania tych zagadnień była praca nad
Autor korespondujący:
Dariusz Rzońca, drzonca@kia.prz.edu.pl
Artykuł recenzowany nadesłany 02.12.2023 r., przyjęty do druku 04.04.2024 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
rozwojem środowiska inżynierskiego CPDev, jednakże przedstawione wyniki mogą znaleźć zastosowanie także w innych systemach.
Kolejny rozdział zawiera zwięzły przegląd literatury tematycznie związanej z artykułem. W trzecim rozdziale przedstawiono komunikację w protokole Modbus i zaproponowano metodę pozwalającą na poprawę parametrów czasowych przy mieszanym odczycie zmiennych binarnych i rejestrowych. Kolejny rozdział poświęcony jest dedykowanemu modelowi optymalizacyjnemu programowania z ograniczeniami. W piątym rozdziale opisano przeprowadzone eksperymenty obliczeniowe i przeanalizowano uzyskane wyniki. Ostatni z rozdziałów podsumowuje artykuł.
2. Przegląd literatury
Współczesne sterowniki przemysłowe PLC i PAC zazwyczaj programowane są w językach normy IEC 61131-3 [1]. Standard ten, przyjęty w Polsce jako PN-EN 61131-3, obejmuje pięć języków programowania, zarówno tekstowych (ST (ang. Structured Text), IL (ang. Instruction List)), graficznych (FBD (ang. Function Block Diagram), LD (ang. Ladder Diagram)), oraz mieszanych (SFC (ang. Sequential Function Chart)). Szczegółową charakterystykę poszczególnych języków, poza normą, można znaleźć w licznych publikacjach, spośród których godna polecenia jest książka [2].
Języki normy IEC 61131-3 implementowane są w wielu pakietach inżynierskich. Niniejszy artykuł koncentruje się na opracowanym w Katedrze Informatyki i Automatyki Politech-
niki Rzeszowskiej środowisku CPDev (ang. Control Program Developer) [3, 4]. Pakiet ten obecnie jest wdrożony przez kilku producentów systemów automatyki, krajowych i zagranicznych (Hiszpania, Holandia). Wśród ciekawszych zastosowań można wyróżnić systemy automatyki okrętowej, jak np. autopilot [5, 6].
Budowa pakietu inżynierskiego CPDev pozwala na jego łatwe wdrożenie na różnych platformach sprzętowych. Edytory graficzne [7] i kompilator działające na PC tworzą kod pośredni VMASM (ang. Virtual Machine Assembler), wykonywany na docelowej platformie sprzętowej przez dedykowany interpreter, wchodzący w skład tzw. maszyny wirtualnej CPDev [8]. Przygotowano oprogramowanie wbudowane (firmware) maszyny wirtualnej dla różnych architektur procesorów, od niewielkich ośmiobitowych AVR (jak w sterowniku SMC pokazanym na Rys. 1) do wielordzeniowych ARM [9]. We wszystkich implementacjach architektura pamięci maszyny wirtualnej CPDev jest podobna, zawiera sąsiadujące ze sobą zmienne różnych typów (np. binarne i szesnastobitowe), co pozwala na wdrożenie mechanizmów poprawy efektywności transmisji przedstawionych w niniejszym artykule.
Efektywna wymiana danych w rozproszonych systemach automatyki stanowi jeden z kluczowych elementów wpływających na wydajność systemu. Ostatnio wydana monografia [10] zawiera bardzo dobry opis wielu zagadnień związanych z komunikacją w przemysłowych systemach komputerowych. Sieci komunikacyjne stosowane w przemyśle [11] zazwyczaj bazują na sieciach polowych [12], a w nowszych rozwiązaniach często wykorzystywany jest przemysłowy Ethernet [13]. W przypadku sieci polowych zazwyczaj stosowane są rozwiązania opisane w normie IEC 61158 [14]. Współcześnie można zaobserwować tendencję do stosowania architektur heterogenicznych, łączących różne typy sieci, zwłaszcza w dużych systemach [15]. Niewielkie rozproszone systemy automatyki wciąż jednak bazują na komunikacji szeregowej (np. RS-485) wykorzystującej przemysłowe protokoły komunikacyjne, jak Modbus czy Profibus. Zwłaszcza protokół Modbus jest bardzo popularny dzięki swojej prostocie.
Problematyka grupowania rejestrów podczas transmisji za pomocą protokołu Modbus była kilkukrotnie poruszana w lite-
raturze, choć z pewnymi ograniczeniami. Zazwyczaj artykuły koncentrowały się na wybranej funkcji Modbus lub konkretnym zastosowaniu (np. wymiana danych między sterownikiem PLC a panelem HMI). Niniejszy artykuł można traktować jako kontynuację poprzednich prac [16, 17]. W artykułach tych rozważano problem grupowania rejestrów w poleceniach FC3, FC6 i FC16 protokołu Modbus RTU, tj. skupiono się na transmisji szesnastobitowych rejestrów. Pominięto możliwość skorzystania z funkcji dedykowanych do transmisji zmiennych binarnych, jak np. FC1, co uzupełniono w niniejszym artykule.
W pracy [18] przedstawiono metodę przyspieszenia wymiany danych w protokole Modbus TCP, podczas transmisji między sterownikiem PLC a panelem HMI. Zaproponowano grupowanie transmitowanych zmiennych w bloki o optymalnej długości. Przedstawiono także wyniki badań eksperymentalnych.
Artykuły [19, 20] omawiają wydajność komunikacji w protokole Modbus przy różnych scenariuszach wymiany danych. Przeanalizowano tam wpływ sąsiadującego lub osobnego rozmieszczenia rejestrów na osiągane parametry czasowe. Zaproponowano także rozszerzenie dla protokołu Modbus. Zostało ono przebadane eksperymentalnie w pracy [21].
W artykule [22] przedstawiono algorytm komparatywnej przewagi dla protokołu Modbus. Grupowanie jest tam jedną z metod terapeutycznych przywracających zdatność systemu komunikacyjnego podczas przeciążenia magistrali komunikacyjnej.
W pracy [23] przeanalizowano wpływ grupowania na osiągane parametry czasowe podczas transmisji rejestrowej w dowolnym protokole komunikacyjnym, nie zawężając problematyki do protokołu Modbus. Nie rozważano tam jednak funkcji bitowych, a wyłącznie transmisję rejestrową.
3. Wymiana danych w protokole Modbus
Protokół Modbus definiuje szereg funkcji służących do wymiany danych. Najczęściej implementowane w sterownikach PLC są następujące funkcje:
− FC1 – odczyt zmiennych binarnych,
− FC2 – odczyt wejść binarnych,
− FC3 – odczyt rejestrów,
− FC4 – odczyt rejestrów wejściowych,
− FC5 – zapis pojedynczej zmiennej binarnej,
− FC6 – zapis pojedynczego rejestru,
− FC15 – zapis wielu zmiennych binarnych,
− FC16 – zapis wielu rejestrów.
Można zauważyć, że wspierane są tu jedynie dwa typy danych: jednobitowe wartości binarne i szesnastobitowe rejestry. Obsługa innych typów zmiennych niż szesnastobitowe (np. zmiennych trzydziestodwubitowych) także prowadzona jest za pomocą funkcji rejestrowych (zmienna trzydziestodwubitowa będzie zajmowała podczas transmisji dwa rejestry).
W niektórych sterownikach wyodrębniono osobne przestrzenie adresowe dla danych binarnych i dla zmiennych wielobitowych. W takim przypadku odczyt czy zapis zmiennych binarnych może być prowadzony wyłącznie za pomocą dedykowanych funkcji (FC1, FC5, FC15). Sterowniki implementujące środowisko inżynierskie CPDev charakteryzują się innym rozwiązaniem. Zmienne różnych typów są przechowywane w tej samej pamięci i są dostępne w ramach wspólnej adresacji. Co więcej, często zmienne różnych typów sąsiadują ze sobą, zwłaszcza przy użyciu typów złożonych jak struktury, które mogą w kolejnych polach zawierać np. zmienne binarne i szesnastobitowe. W pamięci CPDev zmienna binarna zajmuje jeden bajt, w którym siedem najstarszych bitów jest wyzerowanych, a najmłodszy zawiera właściwą informację. Oznacza to, że wyborem projektanta jest czy do odczytu pewnych zmiennych binarnych zastosuje funkcję bitową (FC1) czy rejestrową
Rys. 1. Sterownik SMC z modułami I/O Fig. 1. SMC controller with I/O modules
(FC3). Oczywiście transmisja zmiennych binarnych funkcją rejestrową powoduje, że w polu danych przesyłane są w większości zera, a jedynie nieliczne bity stanowią dane użyteczne. Mimo wszystko, w pewnych wypadkach wspólna transmisja rejestrów i zmiennych binarnych w jednej ramce pozwala na efektywniejsze wykorzystanie łącza w porównaniu z transmisją osobnych ramek binarnych i rejestrowych, co zostanie pokazane w dalszej części artykułu.
Przeanalizujmy ramki poleceń i odpowiedzi dla funkcji FC1 i FC3 Modbus RTU (Rys. 2–5).
W ramce odpowiedzi FC1 zmienne binarne przesyłane są jako pojedyncze bity upakowane w kolejnych bajtach. Oznacza to, że wielkość (liczba bajtów) pola danych zależy od liczby n przesyłanych zmiennych, podzielonej przez osiem (na jednym bajcie przesyłane są wartości ośmiu zmiennych w kolejnych
bitach) i zaokrąglonej do góry 8 n (pozostałe bity uzupełniane są do pełnego bajtu zerami).
Podczas transmisji rejestrów ramką FC3 możliwe jest przesłanie także zmiennych binarnych, sąsiadujących z transmitowanymi rejestrami. W takim przypadku w jednym szesnastobitowym rejestrze mogą być przesłane maksymalnie dwie zmienne binarne, na najmłodszych bitach każdego składowego bajtu, co wynika z organizacji pamięci maszyny wirtualnej CPDev.
Celowe jest rozważenie, który ze wspomnianych sposobów komunikacji jest efektywniejszy dla transmisji zmiennych binarnych. Intuicyjnie można zauważyć, że przypuszczalnie podczas przesyłania znacznej liczby zmiennych binarnych (Modbus pozwala na transmisję do 2000 zmiennych binarnych w pojedynczej ramce) dedykowana funkcja FC1 pozwoli na skrócenie czasu transmisji dzięki większemu upakowaniu danych (osiem zmiennych w jednym bajcie). Jeżeli jednak wymagane jest przesłanie jedynie kilku zmiennych binarnych sąsiadujących z już transmitowanymi rejestrami, to można to osiągnąć niewielkim wydłużeniem obecnych komunikatów
Adres slave 1B Kod funkcji 1B (0x01)
Rys. 2. Ramka polecenia FC1 Modbus RTU Fig. 2. Frame of Modbus RTU FC1 function
Adres slave 1B Kod funkcji 1B (0x01)
rejestrowych, bez potrzeby osobnych zapytań binarnych, co pozwoli zmniejszyć łączny czas transmisji. Przyjmijmy następujące oznaczenia: – tb – czas transmisji jednego znaku (zależny od ustalonej prędkości łącza komunikacyjnego), – t m – czas potrzebny na przygotowanie polecenia przez urządzenie nadrzędne (master),
– t s – czas potrzebny na przygotowanie odpowiedzi przez urządzenie podrzędne (slave), – tcyckei – łączny czas cyklu komunikacyjnego w i-tym przypadku.
Załóżmy, że chcemy przesłać jeden rejestr szesnastobitowy i n zmiennych binarnych. Grupy te rozdzielone są w pamięci sterownika przez k bajtów. Rozważmy dwa przypadki: 1. transmisja dwoma osobnymi komunikatami, przy użyciu funkcji bitowej FC1 i rejestrowej FC3, 2. transmisja łączna przy użyciu p ojedynczej funkcji FC3.
Obliczając łączny czas transmisji w obu przypadkach należy uwzględnić, że protokół Modbus RTU wymaga odstępu między kolejnymi komunikatami na magistrali trwającego co najmniej 3,5tb. Rozważmy czas potrzebny na osobny odczyt (pierwszy przypadek):
Przy odczycie łącznym (drugi przypadek) potrzebujemy:
Adres początkowy 2B Liczba zmiennych 2B
Suma kontrolna 2B
Liczba bajtów 1B
Rys. 3. Ramka odpowiedzi FC1 Modbus RTU Fig. 3. Frame of reply to Modbus RTU FC1 function
Adres slave 1B Kod funkcji 1B (0x03)
Rys. 4. Ramka polecenia FC3 Modbus RTU Fig. 4. Frame of Modbus RTU FC3 function
Adres slave 1B Kod funkcji 1B (0x01)
Rys. 5. Ramka odpowiedzi FC3 Modbus RTU
Adres początkowy 2B Liczba rejestrów 2B
Fig. 5. Frame of reply to Modbus RTU FC3 function
Liczba bajtów 1B Dane 2n B
Suma kontrolna 2B
Suma kontrolna 2B
Suma kontrolna 2B
Obliczmy różnicę tych czasów:
Jeżeli różnica 12 ttcyclecycle jest dodatnia, to efektywniejszy jest przypadek drugi, jeżeli ujemna to pierwszy. Różnicę tę zilustrowano na wykresie (Rys. 6), przyjmując transmisję z prędkością 38 400 bps w formacie 8E1 i czasy t m = t s = 10 ms.
Rys. 6. Różnica tcycle1 − tcycle2 dla prędkości 38 400 bps w zależności od n i k
Fig. 6. Difference tcycle1 − tcycle2 for 38 400 bps baudrate, depending on n and k
Odcieniami niebieskiego oznaczono zakres w którym efektywniejszy jest pierwszy przypadek, a czerwonego – drugi, na biało gdy wynikowa różnica 12 ttcyclecycle jest w pobliżu zera. Widoczny schodkowy charakter powierzchni wynika z obecnych we wzorze zaokrągleń.
4. Zadanie optymalizacji rejestrowo-binarnej
Charakterystyka mieszanego odczytu danych rejestrowych i binarnych omówiona w poprzedniej sekcji może zostać uogólniona do definicji zadania optymalizacji. Definicja. Optymalizacja rejestrowo-binarna polega na wyznaczeniu na podstawie danych instancji ( ) ,,,,,,,,RRRBBBRLH αβωαβω = (1)
gdzie 0 ,,,RLH ≥ ⊂ () , RLH∩∪=∅ RB1 ,,ωω ≥ ∈ RRBB0 ,,,,αβαβ ≥ ∈ rozwiązania = (FR, FB) w formie dwóch zbiorów przedziałów {} {} R RR 0 ,,0,,, ,,, n ii i ii ii FxynR xyRLHyx
= ∈ ∈∪∪≥ (2) {} { } {} { } B BB 0 ,,0,,, ,221,, n ii i ii ii FxynLH xyvvLvvHyx
=∈+ ∈∈∪+∈≥
(3) minimalizującego funkcję celu (4)
przy sp ełnieniu ograniczeń
W interpretacji praktycznej zbiory R, L i H zawierają adresy odpowiednio zmiennych rejestrowych oraz binarnych L i H. W przypadku każdego z tych zbiorów, wartości są numerami słów 16-bitowych, przy czym dla R oznacza to zajętość całego słowa, a dla L i H zajętość odpowiednio dolnej lub górnej połówki słowa przez zmienną binarną. W rozwiązaniu elementy zbioru FR reprezentują wyznaczone w drodze optymalizacji ramki rejestrowe, a elementy zbioru FB ramki binarne. W przypadku zbioru FB, adresy rejestrowe zmiennych binarnych są mapowane funkcjami fL(n) = 2n i fH(n) = 2n+1, co wprowadza rozróżnialność lokalizacji L i H w ramach jednego słowa, niezbędną do sformułowania funkcji celu (4) oraz w ograniczeniu (6). Liczba ramek rejestrowych (2) nie przekroczy |R| w rozwiązaniu optymalnym, ponieważ niezbędna będzie co najwyżej jedna ramka dla każdej zmiennej rejestrowej z osobna. Zmienne binarne również mogą zostać przydzielone do tych ramek, ale rozwiązanie optymalne nie będzie zawierać ramek rejestrowych przekazujących wyłącznie zmienne binarne, bo taki ich zbiór zawsze jest szybciej transmitowany w ramce binarnej. Analogicznie, w rozwiązaniu optymalnym potrzeba co najwyżej |L| + |H| ramek binarnych (3), ponieważ mogą one przekazywać tylko zmienne binarne i w granicznym przypadku każda będzie przesyłana w odrębnej ramce. Ograniczenie (5) zapewnia, że każda zmienna rejestrowa zostanie przesłana w pewnej ramce rejestrowej, natomiast ograniczenie (6) wymusza przydział każdej zmiennej binarnej do pewnej ramki binarnej lub rejestrowej. Ograniczenia (7) i (8) narzucają limity długości ramek zgodnie z wartościami parametrów Rω i B , ω odpowiednio dla ramek rejestrowych i binarnych. Sformułowanie funkcji celu (4) wskazuje, że Rα i Rβ są współczynnikami zależności liniowej łączącej rozmiar ramki rejestrowej z czasem jej transmisji, analogicznie parametry Bα i Bβ dotyczą ramek binarnych, z zastrzeżeniem nieciągłości charakterystycznej dla rozmiarów ramek binarnych, która jest uwzględniona w (4). Utworzona definicja problemu może posłużyć do zaprojektowania algorytmu optymalizacji lub deklaratywnego modelu optymalizacyjnego w formie programowania liniowego mieszanego MILP (ang. Mixed-Integer Linear Programming) lub programowania z ograniczeniami CP (ang. Constraint Programming). W niniejszej pracy wykorzystano solwer Constraint Programming Optimizer (CPO) z pakietu IBM CPLEX [24]. Model CP przedstawiono w Dodatku.
5. Eksperymenty obliczeniowe
Zestawienie specyfikacji i konkretnej konfiguracji protokołu Modbus RTU z rozdziału 3 z modelem optymalizacyjnym omówionym w rozdziale 4 pozwala określić wartości parametrów
R 222000/, b tv α == B 11000/, b tv α ==
RB 20 220000/20, bms tttv ββ==++=+
reprezentujących czas w milisekundach, gdzie ν jest szybkością transmisji, oraz ograniczenia długości ramek
R 125, ω = B 2000. ω =
Tabela 1: Liczba i zakres zmiennych w instancjach testowych
Table 1: Number and range of variables in benchmark instances
Rejestrowe Binarne L Binarne H SumaZakres
8 6 (w tym 2 LH)6 (w tym 2 LH) 20 0–256
24 18 (w tym 6 LH)18 (w tym 6 LH)
72 54 (w tym 18 LH)54 (w tym 18 LH)
60 0–512
1800–1024
Rys. 7. Przykładowe rozwiązania instancji problemu z 20 zmiennymi
Fig. 7. Exemplary solutions to a problem instance with 20 variables
Do badań obliczeniowych wygenerowano trzy zestawy instancji testowych z losowym rozmieszczeniem zmiennych. Zestawy zawierają kolejno 20, 60 i 180 zmiennych, przy czym 40 % wszystkich zmiennych w każdej instancji stanowią zmienne rejestrowe, a 60 % binarne, po 30 % L i H, w tym 20 % to pary LH zajmujące to samo słowo 16-bitowe. Wraz ze wzrostem liczby zmiennych przyjęto również powiększanie zakresu adresowego, z którego były losowane. Parametry instancji testowych zostały zebrane w Tab. 1. Dla każdej instancji wykonano obliczenia z uwzględnieniem trzech popularnych prędkości transmisji { } 9600,38400,115200. v ∈ Łącznie wykonano zatem optymalizację dla 90 wariantów testowych. W każdym przypadku przyjęto limit czasu obliczeń równy jednej godzinie. Na Rys. 7 przedstawiono wynik uzyskany dla jednej przykładowej instancji zawierającej 20 zmiennych przy prędkości transmisji 9600 b/s. Zaprezentowano wyznaczone ramki i odpowiadające im wartości funkcji celu tcycle dla wybranych rozwiązań pośrednich z toku optymalizacji (a) i (b), a także dla końcowego najlepszego rozwiązania (c). W każdym z kolejnych rozwiązań można zaobserwować zasadne decyzje prowadzące do skrócenia czasu komunikacji. Najpierw (a) wyodrębnione zostają dwie ramki rejestrowe pomijające obszar największej przerwy między zmiennymi, którego transmitowanie zwiększyłoby czas komunikacji. Następnie (b) algorytm wykrył, że korzystniej będzie skrócić ramki rejestrowe i wprowadzić ramkę binarną obejmującą większość zmiennych w środkowej części zakresu adresowego. W końcu (c) pierwsza ramka rejestrowa została zupełnie rozbita na komunikaty zawierające pojedyncze zmienne, a ramka binarna rozszerzona na pełny zakres adresowy, co okazuje się jeszcze bardziej skracać czas komunikacji. Przebieg procesu optymalizacji zbiorczo dla wszystkich wariantów testowych został przedstawiony na wykresach z Rys. 8. Ukazują one zmiany wartości funkcji celu w czasie, odrębnie dla poszczególnych 10-elementowych zestawów instancji testowych z określoną liczbą rejestrów (RN) i prędkością transmisji (BR). Z uwagi na cel porównawczy, wartości funkcji
celu podane są w formie znormalizowanej względem ostatniego (najlepszego) wyniku uzyskanego dla każdego testu, co można uznać za wskaźnik bieżącej jakości rozwiązania. Rozwiązania początkowe są zawsze od kilku do kilkunastu razy gorsze od finalnych, co ogólnie potwierdza, że zły plan transmisji może znacząco wydłużyć jej czas i optymalizacja jest ważna. Jak należało oczekiwać, szybkość zbieżności algorytmu wyraźnie spada ze wzrostem liczby zmiennych. Można zauważyć, że ta szybkość zależy również od prędkości transmisji przy stałej liczbie zmiennych i jest wyraźnie najmniejsza dla BR = 9600, natomiast większa i mniej zróżnicowana dla dwóch pozostałych prędkości. Wykresy wskazują najszybszą zbieżność dla przypadku 20 zmiennych i BR = 38 400 lub BR = 115 200. Rzeczywiście, dla tych 20 wariantów testowych solwer zakończył obliczenia przed limitem czasu i uzyskał potwierdzenie optymalności rozwiązania. We wszystkich pozostałych wariantach obliczenia trwały pełną godzinę i optymalność najlepszego rozwiązania nie została potwierdzona.
Uzupełnienie wykresów zbieżności algorytmu stanowią wykresy pudełkowe z Rys. 9 przedstawiające rozkład dwóch wybranych czasów charakterystycznych dla przebiegu obliczeń: (a) czas do pierwszej poprawy poniżej 105 % wartości końcowej i (b) czas do ostatniej poprawy wartości funkcji celu. Wszystkie te czasy są zaniedbywalnie małe dla wariantów z 20 zmiennymi, ale są znaczące dla wszystkich wariantów z instancjami zawierającymi 180 zmiennych. W przypadku 60 zmiennych sytuacja jest zróżnicowana i charakteryzuje się długimi czasami tylko dla BR = 9600. Wykresy wskazują, że w wielu przypadkach czasy charakterystyczne sięgają jednogodzinnego limitu czasu obliczeń, zatem wydłużenie czasu optymalizacji dałoby w tych przypadkach dużą szansę na dalszą poprawę wyników. Na wykresach z Rys. 10 przedstawiono podstawowe cechy strukturalne najlepszych uzyskanych rozwiązań w postaci liczby ramek rejestrowych i binarnych, na jakie został podzielony proces transmisji danych. Liczba ramek rejestrowych rośnie w systematyczny sposób wraz ze wzrostem liczby zmiennych,
= 20, BR = 9600
wynik poprawa
czas optymalizacji [s]
[s]
[s]
RN = 20, BR = 115200 pierwszy wynik poprawa
[s]
RN = 60, BR = 115200 pierwszy wynik poprawa
[s]
Rys. 8. Zmiana funkcji celu w czasie optymalizacji Fig. 8. Objective function value as a function of optimization time
[s]
RN =
= 115200
wynik poprawa
optymalizacji [s]
RN = 20
BR = 9600
38400
115200
RN = 60
BR = 9600
= 38400
RN = 180
BR = 9600
BR = 38400 BR = 115200
12345678910 numer instancji
RN = 20 BR = 9600
= 38400
= 115200
12345678910 numer instancji
12345678910 numer instancji
RN = 180
BR = 9600 BR = 38400
12345678910 numer instancji
12345678910 numer instancji
Rys. 10. Liczby ramek rejestrowych i binarnych w zoptymalizowanych planach odczytu Fig. 10. Numbers of register and binary frames in optimized reading plans
przy czym wynosi ona przynajmniej 2, 3 lub 7 odpowiednio dla 20, 60 lub 180 zmiennych. W żadnym przypadku wszystkie zmienne nie zostały spakowane do jednej ramki rejestrowej, ale uniemożliwia to jej limit długości R 125, ω = przy jego braku być może powstałyby takie rozwiązania optymalne. Dla ustalonej liczby zmiennych liczba ramek rejestrowych rośnie wraz ze zmniejszaniem prędkości transmisji i uzyskuje duże wartości szczególnie dla BR = 9600. Tę zależność można łatwo wyjaśnić jakościowo. Dla relatywnie małej prędkości transmisji stały wkład czasu przetwarzania t p = t m + t s przypadający na każdą ramkę staje się relatywnie mniejszy względem czasu transmisji znaku tb, przez co zwielokrotnianie t p przy wyodrębnianiu dodatkowych ramek może być lepsze od zwielokrotniania tb w długich ramkach z adresami nieobsadzonymi przez zmienne. Dla relatywnie dużej prędkości transmisji zależności odwracają się. Duża liczba ramek dla BR = 9600 pozwala też lepiej zrozumieć wydłużenie czasów optymalizacji dla takich przypadków obserwowane na Rys. 8. Jest to najprawdopodobniej spowodowane znaczną liczbą rozwiązań suboptymalnych z dużą liczbą ramek, które tworzą większą przestrzeń przeszukiwań. Liczba ramek binarnych w rozwiązaniach najlepszych wynosi zwykle 0 lub 1. W pierwszym przypadku wykorzystywana jest możliwość przesłania zmiennej binarnej w ramce rejestrowej. W drugim przypadku, jeśli już zastosowanie ramki binarnej jest korzystne, zwykle jej podział na mniejsze ramki byłby nieprzydatny z uwagi na znaczną proporcję czasu tp względem czasu transmisji właściwych danych. Wyjątkowo, w przypadku jednej instancji dla RN = 180 i BR = 9600, rozwiązanie ma aż 10 ramek binarnych.
6. Podsumowanie
12345678910
W artykule przeanalizowano wpływ różnych sposobów odczytu zmiennych binarnych za pomocą protokołu Modbus na łączny czas cyklu komunikacyjnego. Pokazano sytuację, gdy odczyt zmiennych binarnych wraz ze zmiennymi rejestrowymi może prowadzić do poprawy parametrów czasowych, jak też przypadki gdy korzystniejsze jest użycie dedykowanych funkcji bitowych.
Dobór optymalnego grupowania zmiennych do osobnych zadań komunikacyjnych jest złożonym zagadnieniem, zwłaszcza w praktycznych zastosowaniach, gdy liczba zmiennych jest znaczna. W artykule zaproponowano model optymalizacyjny pozwalający na automatyczne znalezienie najlepszego rozwiązania za pomocą uniwersalnego oprogramowania optymalizacyjnego. Przedstawiono przeprowadzone eksperymenty i omówiono uzyskane wyniki. Jak pokazano, zaproponowany model może być użyteczny dla projektanta systemu.
Uzyskane wyniki eksperymentów wskazują, że celowy będzie dalszy rozwój modeli i algorytmów optymalizacji dla problemu transmisji rejestrowobinarnej. Nowe podejścia mogą się okazać szybsze i wydajniejsze od zaproponowanego, a także pozwolą lepiej zweryfikować jakość uzyskanych rozwiązań przez ich porównanie z dodatkowymi wynikami.
Zaobserwowane cechy zoptymalizowanych rozwiązań, zwłaszcza widoczne na Rys. 7 i 10, wskazują, że najlepsze plany transmisji charakteryzują się pewnymi łatwo identyfikowalnymi cechami, takimi jak np. minimalna liczba ramek binarnych, czy podział ramek rejestrowych w miejscach, w których
odstęp między zmiennymi przekracza pewną wartość. Sugeruje to możliwość opracowania szybkich algorytmów heurystycznych, możliwych do zaimplementowania bezpośrednio w urządzeniach PLC, które na podstawie wyodrębnionych prostych reguł mogłyby tworzyć przynajmniej suboptymalne plany komunikacji. Rozwiązania zoptymalizowane metodami zaawansowanymi, jak użyte w niniejszej pracy programowanie z ograniczeniami, mogą stanowić dane referencyjne do oceny algorytmów heurystycznych.
Dodatek
W dodatku przedstawiono główne elementy modelu programowania z ograniczeniami, który wykorzystano do rozwiązania zadania optymalizacji omówionego w rozdziale 4 z pomocą oprogramowania IBM CPO. Na podstawie danych zadania (1) zdefiniowano: cR = |R|, R = {r1, r2, ..., Rc r }, {} { } 221, BvvLvvH =∈∪+∈ cB = |B|, B = {b1, b2, ..., Bc b }, mB = max(B), () RB max mRLH =∪∪
W modelu optymalizacyjnym CP przyjęto następujące zmienne decyzyjne: – {} RR RB ,0,,ii xym ∈ dla {} R 0,, ic ∈ – reprezentują
dolne i górne ograniczenia i-tego przedziału w FR,
{} BB B ,0,,ii xym ∈ dla {} B 0,, ic ∈ – reprezentują dolne
i górne ograniczenia i-tego przedziału w FB,
– {} R 0,1 ij v ∈ dla {} R ,1,, ijc ∈ – równa 1 wtedy i tylko
wtedy, gdy
RR ,,ijj rxy ∈
{} B 0,1 ij v ∈ dla {} B ,1,, ijc ∈ – równa 1 wtedy i tylko
wtedy, gdy BB ,,ijj bxy ∈
{} BR 0,1 ij v ∈ dla {} B 1,,,ic ∈ {} R 1,, jc ∈ – równa 1
wtedy i tylko wtedy, gdy RR /2,. ijj bxy ∈
Dostosowanie przedziałów do przydzielonych zmiennych zapewniają ograniczenia warunkowe
RR1,ij ji vxr =⇒≤ RR1,ij ji vyr =⇒≥ dla {} R ,1,,, ijc ∈
BB1,ij ji vxb =⇒≤ BB1,ij ji vyb =⇒≥ dla {} B ,1,,, ijc ∈
BR R 1/2, ij ji vxb =⇒≤ BR R 1/2, ij ji vyb =⇒≤
dla {} B 1,,,ic ∈ {} R 1,, jc ∈
Przy tak zdefiniowanych i powiązanych zmiennych decyzyjnych warunek (5) sprowadza się do ograniczeń
R R 0 1 c ij j v ≥ ∑ dla {} R 1,,,ic ∈
natomiast warunek (6) do ograniczeń
R B BBR 00 1 c c ij ij jj vv ∑∑+≥ dla {} B 1,,.ic ∈
Ograniczenia (7) i (8) bez zmian przenoszą się do modelu CP. Jeżeli do jakiegoś przedziału w FR lub FB nie zostanie przydzielona żadna transmitowana zmienna, to możliwe staje się spełnienie ograniczeń odpowiednio RR ii xy > lub BB , ii xy > które w modelu potraktowano jako warunki wykluczenia wkładu danego przedziału do wartości funkcji celu. Dzięki temu model działa poprawnie przy zmiennej, nieznanej z góry, liczbie ramek. W implementacji funkcji celu (4) pomocne były działania dzielenia całkowitoliczbowego i reszty z dzielenia wspierane przez CPO, które ułatwiły odwzorowanie występującej w niej nieciągłości.
2. Kasprzyk J., Programowanie sterowników przemysłowych Wydawnictwo Naukowe PWN, 2006.
3. Rzońca D., Sadolewski J., Stec A., Świder Z., Trybus B., Trybus L., Implementacja środowiska inżynierskiego na przykładzie pakietu CPDev, „Pomiary Automatyka Robotyka”, Vol. 24, Nr. 1, 2020, 21–28, DOI: 10.14313/PAR_235/21
4. Rzońca D., Sadolewski J., Stec A., Świder Z., Trybus B., Trybus L., Developing a Multiplatform Control Environment, “Journal of Automation, Mobile Robotics and Intelligent Systems”, Vol. 13, No. 4, 2019, 73–84, DOI: 10.14313/JAMRIS/4-2019/40.
5. Świder Z., Prototyp kaskadowego autopilota okrętowego zaimplementowany w środowisku CPDev, „Pomiary Automatyka Robotyka”, Vol. 27, Nr 1, 2023, 61–66, DOI: 10.14313/PAR_247/61
6. Stec A., Świder Z., Trybus L., Jednolite projektowanie regulatorów kursu i ścieżki dla autopilota statku, ”Pomiary Automatyka Robotyka”, Vol. 27, Nr 1, 2023, 45–50, DOI: 10.14313/PAR_247/45
7. Świder Z., Edytory graficzne języków LD i FBD w pakiecie CPDev, „Pomiary Automatyka Robotyka”, Vol. 24, Nr 1, 2020, 29–34, DOI: 10.14313/PAR_235/29
8. Trybus B., Development and Implementation of IEC 61131-3 Virtual Machine, “Theoretical and Applied Informatics”, Vol. 23, No. 1, 2011, 21–35, DOI: 10.2478/v10179-011-0002-z.
9. Hubacz M., Trybus B., Dual-Core PLC for Cooperating Projects with Software Implementation, “Electronics”, Vol. 12, No. 23, 2023, DOI: 10.3390/electronics12234730.
10. Stój J., Wybrane zagadnienia sieci komunikacyjnych w przemysłowych systemach komputerowych. Wydawnictwo Politechniki Śląskiej, 2023.
11. Silva M., Pereira F., Soares F., Leão C.P., Machado J., Carvalho V., An Overview of Industrial Communication Networks, [In:] New Trends in Mechanism and Machine Science (Flores P., Viadero F., eds.), (Cham), Springer International Publishing, 2015, 933–940, DOI: 10.1007/978-3-319-09411-3_97.
12. Thomesse J., Fieldbus Technology in Industrial Automation, “Proceedings of the IEEE”, Vol. 93, No. 6, 2005, 1073–1101, DOI: 10.1109/JPROC.2005.849724.
13. Ga j P., Jasperneite J., Felser M., Computer Communication Within Industrial Distributed Environment – a Survey, “IEEE Transactions on Industrial Informatics”, Vol. 9, No. 1, 2013, 182– 189, DOI: 10.1109/TII.2012.2209668.
15. Scanzio S., Wisniewski L., Gaj P., Heterogeneous and dependable networks in industry – A survey, “Computers in Industry”, Vol. 125, 2021, DOI: 10.1016/j.compind.2020.103388.
16. Rzońca D., Poprawa wydajności komunikacji sterownika przemysłowego z panelem operatorskim HMI w środowisku inżynierskim CPDev, „Pomiary Automatyka Robotyka”, Vol. 24, Nr 1, 2020, 35–40, DOI: 10.14313/PAR_235/35
17. Rzońca D., Przyspieszenie wymiany danych w protokole Modbus między PLC a HMI wykorzystującymi pakiet inżynierski CPDev, Pomiary Automatyka Robotyka, Vol. 26, Nr 4, 2022, 85–89, DOI: 10.14313/PAR_246/85.
18. Titaev A., Reducing update data time for exchange via MODBUS TCP protocol by controlling a frame length, “Automatic Control and Computer Sciences”, Vol. 51, 2017, 357–365, DOI: 10.3103/S014641161705008X.
19. Gãitan V.G., Zagan I., Modbus Protocol Performance Analysis in a Variable Configuration of the Physical Fieldbus Architecture, “IEEE Access”, Vol. 10, 2022, 123942–123955, DOI: 10.1109/ACCESS.2022.3224720.
20. Zagan I., Gãitan V.G., Enhancing the Modbus Communication Protocol to Minimize Acquisition Times Based on an STM32-Embedded Device, “Mathematics”, Vol. 10, No. 24, 2022, DOI: 10.3390/math10244686.
21. Gãitan V.G., Zagan I., Experimental Implementation and Performance Evaluation of an IoT Access Gateway for the Modbus Extension, “Sensors”, Vol. 21, No. 1, 2021, DOI: 10.3390/s21010246.
22. Bednarek M., Będkowski L., Dąbrowski T., Wybrane funkcje systemu dozorująco-terapeutycznego w układzie komunikacji, „Diagnostyka”, Vol. 34, 2005, 31–36.
23. Bożek A., Rzońca D., Communication Time Optimization of Register-Based Data Transfer, “Electronics”, Vol. 12, No. 24, 2023, DOI: 10.3390/electronics12244917.
Optimization of Mixed Reading of Binary and Register Variables in Modbus Protocol from PLC Implementing CPDev
Abstract: Efficient communication is crucial for the proper operation of distributed automation systems. The article focuses on one of the aspects of such communication, related to the mixed reading of binary and register variables from the PLC controller in the Modbus RTU protocol. The research assumed a memory architecture with common addressing of variables of different types, allowing reading binary variables not only using dedicated bit functions (such as FC1), but also Modbus register functions (such as FC3). Such an architecture occurs, e.g., in controllers implementing the CPDev engineering environment. The article proposes a method of appropriate grouping of variables, leading to a reduction of the total communication cycle time. An optimization model has been implemented to automatically find the optimal grouping. Experiments were carried out and the obtained results were discussed. The results of the conducted research will be used in the development of the CPDev engineering environment.
Licencjat matematyki (Uniwersytet Rzeszowski 2002), magister inżynier informatyki (Politechnika Rzeszowska 2004), doktor nauk technicznych w dyscyplinie informatyka, specjalność przemysłowe systemy informatyki (Politechnika Śląska 2012). Od 2004 roku asystent, a od 2013 adiunkt w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Jego zainteresowania naukowe koncentrują się na kolorowanych sieciach Petriego oraz zagadnieniach związanych z komunikacją w systemach automatyki.
dr inż. Andrzej Bożek
abozek@prz.edu.pl
ORCID: 0000-0003-3015-7474
Absolwent Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej (2008). Stopień doktora nauk technicznych w dyscyplinie informatyka uzyskał w 2015 r. Pracuje jako adiunkt w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Jego zainteresowania naukowe dotyczą optymalizacji dyskretnej, harmonogramowania zadań oraz projektowania układów sterowania.
Dariusz Rzońca, Andrzej Bożek
Model i implementacja dwurdzeniowego sterownika programowalnego opartego na maszynie wirtualnej
Marcin Hubacz, Jan Sadolewski, Bartosz Trybus
Politechniki Rzeszowska, Wydział Elektrotechniki i Informatyki, Katedra Informatyki i Automatyki, ul. Wincentego Pola 2, 35-021 Rzeszów
Streszczenie: Przedstawiono koncepcję, model semantyczny oraz prototypową implementację dwurdzeniowego sterownika programowalnego. Koncepcja budowy sterownika obejmuje równoległe przetwarzanie dwóch programów wykonawczych za pośrednictwem maszyny wirtualnej, wykorzystując wspólny obszar pamięci zmiennych globalnych. Zaprezentowany model przedstawia formalny opis wykonywania przenaszalnych programów binarnych powstałych na podstawie języków normy IEC 61131-3 w środowisku programistycznym CPDev. Przedstawiona architektura opisuje działanie maszyny wirtualnej za pomocą abstrakcyjnych obiektów algebraicznych. Rozwiązanie zaimplementowane zostało w języku C/C++ na dwurdzeniowej platformie mikrokontrolerowej.
Słowa kluczowe: PLC, IEC 61131-3, model formalny, maszyna wirtualna
1. Wprowadzenie
Rosnąca złożoność systemów automatyki przemysłowej stawia wyższe wymagania co do mocy obliczeniowej jednostek sterujących. Nowoczesne aplikacje podnoszą oczekiwania w zakresie pracy w czasie rzeczywistym, bezpieczeństwa i niezawodności. Jednocześnie ograniczenia technologiczne układów scalonych uniemożliwiają poprawę wydajności przez wyłącznie zwiększanie częstotliwości taktowania jednostek obliczeniowych. Obecnie rozwiązaniem tego problemu mogą być jednostki wielordzeniowe. Można zauważyć, że ewolucja systemów wbudowanych zmierza w tym kierunku, czego przykładem są komercyjne rozwiązania, np. seria Embedded PC firmy Beckhoff [13], która stosuje dwurdzeniowy procesor ARM Cortex-A53 oraz PLCnext firmy Phoenix Contact [14] z dwurdzeniowym procesorem ARM Cortex-A9. Według badań [6] architektura ARM (ang. Advanced RISC Machine) znajduje zastosowanie w aż 70 % systemów wbudowanych. Jej najważniejszymi zaletami są wysoka wydajność, stosunkowo niskie zużycie energii oraz korzystna cena jednostkowa. Popularność ta wynika również z elastycznego sposobu licencjonowania tej architektury. Rodzina procesorów Cortex, oparta na wspomnianej architekturze składa się z trzech głównych serii: aplikacyjnej (A), mikrokontrolerowej (M) oraz czasu rzeczywistego i bezpieczeństwa (R). Warto zaznaczyć, że rodzina M nie zawiera jednostki MMU (ang. Memory Management Unit),
Autor korespondujący:
Marcin Hubacz, m.hubacz@prz.edu.pl
Artykuł recenzowany nadesłany 03.12.2023 r., przyjęty do druku 21.08.2024 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
w przeciwieństwie do rdzeni A i R. MMU jest wymagany do implementacji zaawansowanych systemów operacyjnych. Producenci układów opartych na architekturze ARM wyposażają je często w kilka rdzeni procesorowych. Możliwe jest wówczas bezstratne podzielenie zadań w zależności od zapotrzebowania. W niniejszej pracy cecha ta jest wykorzystywana do wykonywania dwóch projektów sterujących jednocześnie, co odpowiada zastosowaniu dwóch niezależnych sterowników PLC (PLC+PLC). Innym przykładem może być połączenie sterowania (PLC) z interfejsem człowiek-maszyna (HMI), które można określić w skrócie rozwiązaniem PLC+HMI. Dodatkowy podział może objąć również zadania dodatkowe, jak zarządzanie magistralą obiektową, połączenie z chmurą, serwer OPC UA i wiele innych. Takie połączenie można określić połączeniem PLC+EXT TASK. Inne rozwiązanie znane jest pod nazwą sterowników redundantnych lub zabezpieczeniowych, zwyczajowo wyposażonych w dwa procesory wykonujące dwa programy: główny i rezerwowy.
Norma IEC 61131-3 [15] standaryzująca automatykę przemysłową definiuje pięć języków programowania. Do wyboru są tekstowe IL i ST, graficzne LD i FBD oraz mieszany SFC. Jednostki organizacyjne oprogramowania (POU) zdefiniowane w normie składają się z programów, bloków funkcyjnych i funkcji. Zmienne dzieli się na lokalne, deklarowane wewnątrz jednostek i globalne, dostępne w ramach całego projektu, służące także do komunikacji z otoczeniem. Do przykładowych środowisk implementujących standard IEC 61131-3 zaliczyć można STEP7 [2], CODESYS [16] czy LogicLab [1]. Budowę takiego narzędzia można zasadniczo podzielić na trzy główne komponenty: środowisko IDE, kompilator i środowisko uruchomieniowe (ang. runtime). W edytorach języków normy tworzony jest system sterowania, który następnie kompilator przekształca na wykonywalny kod binarny. Ten kod jest przenoszony do środowiska uruchomieniowego, dedykowanego dla danego sterownika. Kod jest wykonywany w czasie rzeczywistym, w sposób cykliczny lub w reakcji na określone zdarzenie.
Środowisko programistyczno-uruchomieniowe CPDev zostało zaprojektowane zgodnie z wymogami obowiązującej normy automatyki IEC 61131-3. Podstawą działania sterownika jest koncepcja maszyny wirtualnej [12], której zadaniem jest przetwarzanie binarnego kodu pośredniego generowanego przez kompilator. Takie podejście zyskało na znaczeniu ze względu na powszechne wykorzystanie Javy [17] i .NET [18, 19]. Rozwiązania oparte na maszynach wirtualnych mają kilka istotnych zalet, takich jak: a) niezależność programu źródłowego i kodu pośredniego od platform docelowych, b) jeden kompilator, c) wykonywanie programu w chronionym środowisku. Jednak wady to: a) wolniejsze wykonywanie kodu pośredniego oraz b) konieczność przygotowania środowiska uruchomieniowego dla konkretnej platformy docelowej.
W środowisku CPDev kompilator przekształca kod ST (inne języki są wcześniej konwertowane do ST) do kodu pośredniego VMASM, który jest następnie przetwarzany przez zaimplementowaną na danej platformie docelowej maszynę wirtualną opracowaną w języku C [8, 12]. Początkowo rozważano małe i średnie sterowniki. Jednak w ostatnim czasie pojawiła się potrzeba, motywowana bardziej rozbudowanymi aplikacjami, rozszerzenia kompilatora i maszyny wirtualnej CPDev o wsparcie dla dwurdzeniowych platform wykonawczych. W związku z tym opracowano formalny model semantyczny dwurdzeniowego sterownika z dwoma pracującymi maszynami wirtualnymi i nowymi instrukcjami do wymiany zmiennych między rdzeniami. Następnie przystąpiono do implementacji prototypu w języku C na wybranej platformie sprzętowej. Przygotowany model formalizuje niezależne działanie maszyn wirtualnych na dwóch jednostkach wykonawczych. Każda z nich przetwarza swój kod pośredni, na co składa się dekodowanie instrukcji, ich operandów oraz niskopoziomowych operacji. W opisie formalnym jest stosowana semantyka denotacyjna [3, 11] odpowiednia dla języków programowania [7, 10]. Zastosowana została adekwatna notacja wykorzystująca wyrażenia lambda [3, 20].
2. Koncepcja rozwiązania
Koncepcję dwurdzeniowego sterownika programowalnego można postrzegać jako równoważną dwóm niezależnym sterownikom programowalnym połączonym pewnym łączem komunikacyjnym. W ramach opracowanego rozszerzenia wykorzystano obszar pamięci współdzielonej dostępny w układach wielordzeniowych.
Głównym założeniem modyfikacji jest zachowanie w możliwie niezmienionej formie schematu działania maszyny wirtualnej w każdym z rdzeni. W związku z tym utrzymywana jest niezależność pracy i zasobów instancji maszyny, ze szczególnym uwzględnieniem obszarów pamięci dla zmiennych. Realizacja kanału wymiany informacji wymagała jednak podziału pamięci na lokalną dla każdego z rdzeni i współdzieloną. Pierwsza została zachowana zgodnie z pierwotną koncepcją, natomiast druga stanowi niezależne rozszerzenie.
Na rysunku 1 przedstawiono ogólną architekturę dwurdzeniowego sterownika PLC, gdzie Projekt 1 i Projekt 2 reprezentują
Projekt 1
Rdzeń 1
pamięć
lokalna
wymiana informacji
pamięć współdzielona
oprogramowanie sterujące wykonywane przez rdzenie. Maszyna wirtualna została rozszerzona o dodatkowe instrukcje i mechanizmy zarządzające pamięcią w porównaniu do wersji jednordzeniowej. Zależność między współpracującymi projektami opiera się na wymianie zmiennych globalnych przez pamięć współdzieloną, do której dostęp mają oba rdzenie układu.
Aby utworzyć łącze komunikacyjne w oparciu o pamięć współdzieloną, konieczna jest synchronizacja współdzielonych zmiennych globalnych między dwoma projektami. Ze względów bezpieczeństwa i spójności dostęp do zmiennych musi być zabezpieczony przed odczytem podczas aktualizacji. Praktyką programistyczną jest aktualizowanie zmiennej wyłącznie z jednego projektu. W związku z tym wprowadzono dodatkowe reguły kontrolujące dostęp do zmiennej globalnej.
W projekcie zawarta jest pełna lista zmiennych globalnych. Specjalne atrybuty zmiennych oznaczają typ dostępu do zmiennej z odpowiedniego rdzenia. I tak, element listy może być modyfikowany (WRITE = 1, READ = 0), odczytywany (WRITE = 0, READ = 1) lub nieużywany (WRITE = 0, READ = 0). Zastosowanie przygotowanych reguł umożliwia bezpieczny dostęp i edycję zmiennych w projektach współpracujących. Środowisko CPDev umożliwia jednoczesne rozwijanie i edycję obu projektów, co przedstawione zostało na rysunku 2. Podczas wykonywania cyklu sterowania przez sterownik PLC stosowany jest tryb odczyt-wykonanie-zapis w odniesieniu do zmiennych globalnych. Taki układ skutkuje przeniesieniem zmiennych wejściowych do lokalnych kopii pamięci, gdzie są używane. Po zakończeniu cyklu sterowania, zmienne wyjściowe przekazywane są do globalnych kopii. W praktyce oznacza to, że wszystkie wartości będące wejściami są przenoszone do wewnętrznych lokalnych kopii. Aby zaimplementować takie zachowanie, dwurdzeniowy sterownik musi zostać rozszerzony
Rys. 2. Projekty współpracujące Projekt1 i Projekt2 dla dwurdzeniowego sterownika w środowisku CPDev
Fig. 2. Cooperating projects Project1 and Project2 for a dual-core controller in the CPDev environment
zmienne globalne zmienne lokalne współdzielone inne
Rys. 3. Organizacja pamięci dwurdzeniowego sterownika PLC
Fig. 3. Memory organization of a dual-core PLC controller
o operacje kopiowania z pamięci współdzielonej na początku cyklu i kopiowania do niej na końcu. Na rysunku 3 przedstawiono przykład operacji odczytu i zapisu zmiennych globalnych do pamięci współdzielonej przez oba rdzenie.
3. Dziedziny semantyczne
Modele semantyczne umożliwiają formalny opis języków programowania [9, 10]. Tutaj to podejście zostało zastosowane do modelowania działania maszyny wirtualnej dla systemów sterowania. Na opis maszyny składają się różne dziedziny semantyczne, które definiują stan, operacje dotyczące pamięci, interpretery wartości odnoszące się do typów danych normy IEC, operatory o ograniczonym zasięgu czy uniwersalne funkcje semantyczne wywołujące konkretne instrukcje maszyny wirtualnej.
Model obejmuje typy danych charakteryzujące wartości przetwarzane przez maszynę wirtualną. Domena BasicTypes jest unią czterech zbiorów bajtów reprezentujących rozmiary podstawowych typów danych (np. BOOL, BYTE – 1B; INT, WORD – 2B; DWORD, REAL, ADDRESS – 4B; LWORD, LREAL – 8B).
BasicTypes = Byte1 + Bytes2 + Bytes4 +Bytes8
Dziedzina Memory jest funkcją mapującą Address (Bytes4, czyli adres 32-bitowy) do Byte1 Maszyna wirtualna używa dwóch obszarów pamięci: CodeMemory zawierający kod programu do wykonania oraz DataMemory, gdzie przechowywane są wartości zmiennych. Dziedzina Stack reprezentuje sekwencję wartości (oznaczoną jako ∗ – symbol domknięcia Kleenego) z dziedziny Address, przy czym CodeStack i DataStack służą jako aliasy dla konkretnych typów stosów. Stosy CodeStack i DataStack są używane przy skokach do procedur (np. bloków funkcjonalnych). CodeReg i DataReg reprezentują rejestry bazowe dla kodu i danych, zaś rejestr Flags przechowuje różne flagi statusowe.
Address = Bytes4
Memory = Address → Byte1
CodeMemory = Memory
DataMemory = Memory
Stack = Address*
CodeStack = Stack
DataStack = Stack
CodeReg = Address
DataReg = Address Flags = Bytes2
Fundamentalnym celem wykonania programu jest zmiana aktualnego stanu na nowy. Bieżący stan maszyny wirtualnej jest iloczynem kartezjańskim dziedzin pamięci stanów, rejestrów, stosów i flag itd.
State = CodeMemory × DataMemory × CodeStack ×
DataStack × CodeReg × DataReg × Flags
Dziedzinę oznaczoną jako State można także opisać jako zbiór krotek:
(cm, dm, cs, ds, cr, dr, flg)
gdzie każdy element odpowiada wartości w odpowiadającej mu dziedzinie.
Funkcje przedstawione dalej modelują niskopoziomowe operacje związane z pamięcią, stosem i flagami.
Pobieranie z pamięci (odczyt) danych o określonym rozmiarze
G1BM = (Address × Memory) → Byte1
G2BM = (Address × Memory) → Bytes2
G4BM = (Address × Memory) → Bytes4
G8BM = (Address × Memory) → Bytes8
−Pobieranie adresu z pamięci
GetAddress = (Address × Memory) → Address
Funkcja zwraca wartość przechowywaną pod danym adresem w pamięci, który jest innym adresem (adresacja pośrednia). Maszyna wirtualna nie ma rejestru akumulatora i działa bezpośrednio na adresach, stąd funkcja GetAddress jest istotna dla modelu.
Aktualizacja pamięci (zapis) danych o określonym rozmiarze
gdzie Address reprezentuje źródło i cel kopiowania pamięci, a Byte1 zawiera liczbę kopiowanych bajtów danych (0–255).
−Funkcje stosu
Push = (Stack × Address) → Stack
Pop = Stack → (Address × Stack)
Funkcje wykonują operacje stosu potrzebne w podprogramach. Należy zauważyć, że funkcja Pop zwraca parę, tj. adres i nową zawartość stosu.
Interpretatory wartości realizują następujące przykładowe interpretacje fragmentów pamięci na dane określonych typów.
BoolOf = Byte1 → BOOL
FromBool = BOOL → Byte1
IntOf = Bytes2 → INT
FromInt = INT → Bytes2
DIntOf = Bytes4 → DINT
FromDInt = DINT → Bytes4
LIntOf = Bytes8 → LINT
FromLInt = LINT → Bytes8
4. Model maszyny wirtualnej
Maszyna wirtualna pobiera kody poszczególnych instrukcji wraz z operandami z pamięci kodu (CodeMemory). Kod każdej z instrukcji składa się z dwóch składowych, oznaczających grupę, do której należy instrukcja (ig) oraz typ jej określonego działania (it). Do przedstawienia koncepcji grupy i typu, po którym następuje wykonanie określonej instrukcji, w modelu zdefiniowano uniwersalną funkcję obejmującą wszystkie instrukcje:
[[any_instruction]] = State → State
Wewnętrznie, po zdekodowaniu ig i it, jest wywoływana określona funkcja maszyny wirtualnej.
C[[instruction]] = State → State
Na rysunku 4 przedstawiono schemat blokowy algorytmu dekodowania instrukcji maszyny wirtualnej. Najpierw pobierane są jej składowe ig i it. Następnie grupa ig jest porównywana z określonymi wartościami. Wartość ig = 05 oznacza grupę instrukcji negacji bitowej (NOT), zaś ig = 12 oznacza porównania (EQ). W przypadku obu grup składowa it wybiera typ danych. Stąd dla it = 10 negacja dotyczy typu BOOL, a it = 11 typ BYTE. Dla instrukcji EQ it = 00 oznacza typ BOOL, a it = 01 typ SINT.
Dekodowanie instrukcji można formalnie wyrazić denotacyjnym równaniem semantycznym pokazanym na listingu 1. Zgodnie z [3] lub [20], wyrażenie λ ma p ostać λs.body, gdzie s oznacza aktualny stan, a body określa wartość zwracaną przez funkcję. Body składa się z sekwencji operacji, z których pierwsza dzieli bieżący stan s na krotkę złożoną z komponentów modelu. Następnie wykonywane są operacje dekowania wartości identyfikatorów ig oraz it, aktualizacji rejestru kodu do cr2 i przez dopasowanie wywołanie odpowiednich funkcji C. Otrzymany wynik z C definiuje nowy stan s1 zwrócony przez funkcję U Modelowanie instrukcji maszyny za pomocą równań denotacyjnych przedstawić można ogólnie jako C[[x]] = λs body, gdzie zastępuje się deskryptorem konkretnej instrukcji. Pierwszą ope-
START
ig := G1BM(cr,cm) cr1 := cr ⊕ 1
it := G1BM(cr1,cm)
cr2 := cr1 ⊕ 1
ig = 05
Wybór grupy
Wybór typu
ig = 10
Pobieranie numeru grupy
Pobieranie numeru typu
ig = 11
ig = 12
C[[NOT:BOOL:r:op1]]
(cm, dm, cs, ds, cr2, dr, flg)
C[[NOT:BYTE:r:op1]]
(cm, dm, cs, ds, cr2, dr, flg)
racją w body jest podzielenie przez unifikacje aktualnego stanu s na komponenty.
(cm, dm, cs, ds, cr, dr, flg) := s
Uzyskanie wartości zmiennej, np. logicznej w pamięci danych dm uzyskuje się za pomocą:
BoolOf(G1BM(operandaddr, dm))
U[[any_instruction]] = λs
(cm, dm, cs, ds, cr, dr, flg) := s
ig := G1BM(cr, cm)
cr1 := cr ⊕ 1
it := G1BM(cr1, cm)
cr2 := cr1 ⊕ 1
s1 := match ig with |05 → match it with |10 → C[[NOT: BOOL: r: op1]]
Listing 1. Równanie semantyczne funkcji dekodującej
Listing 1. Semantic equation of the decoding function
W przypadku, gdy instrukcja ma operand, rejestr kodu cr jest zwiększany, wskazując na następną komórkę pamięci:
cr1 := cr ⊕ AddressSize
Zdefiniowanie nowego stanu s1 w postaci krotki jest ostatnią operacją w body, podczas której kropki zastępowane są nowymi wartościami pamięci danych (jeżeli aktualizowane), stosami itp.
s1 := (cm, )
Semantyka funkcji NOT przedstawiona na listingu 2 neguje wartość przechowywaną w op1. Adresy raddr, op1addr wyznaczane są, jak wskazano poprzednio, po czym następuje wartość logiczna bv. Za pomocą funkcji U1BM aktualizowana jest wówczas wartość raddr w pamięci danych dm. Wartość ta jest określana na podstawie bv przez FromBool i dopasowywana, a um oznacza nowy stan pamięci danych.
ig = 00
F F ... F ...
ig = 01
C[[EQ:BOOL:r:op1:op2]]
(cm, dm, cs, ds, cr2, dr, flg)
C[[EQ:SINT:r:op1:op2]]
(cm, dm, cs, ds, cr2, dr, flg)
Błędna instrukcja
(cm, dm, cs, ds, cr2, dr, flg)
SetFlag(flg, FAULT)
STOP
Rys. 4. Algorytm dekodowania instrukcji maszyny wirtualnej
Fig. 4. Instruction decoding algorithm of the virtual machine
State = CoreState × CoreState × SharedMemory × SharedFlags
Stan systemu dwurdzeniowego uwzględnia dodatkowo flagi statusowe pamięci dzielonej SharedFlags. Oznaczając obie maszyny za pomocą indeksów A i B stan ten można również zapisać jako:
Jak wspomniano, synchronizacja zmiennych globalnych odbywa się poprzez kopiowanie ich wartości z pamięci rdzenia do pamięci globalnej i odwrotnie. Służą do tego procedury DM_TO_SH (Data Memory To Shared Memory) i SH_TO_DM (Shared Memory To Data Memory). Poniżej przedstawiono równanie denotacyjne dla pierwszej z nich, przy założeniu, że następuje aktualizacja z maszyny A do pamięci dzielonej.
Listing 3. Semantic equation of the function DM_TO_SH
Równanie dla procedury synchronizacji w drugą stronę, tj. SH_TO_DM jest analogiczne. Jak wspomniano, należy zapobiec aktualizacji pamięci współdzielonej przez dwie maszyny jednocześnie. W tym celu można zastosować flagę SharedFlags.InUse, która określa zajętość pamięci współdzielonej. Algorytm dostępu do pamięci w celu jej synchronizacji można wtedy zapisać jak na listingu 3.
while (SharedFlags.InUse) { if (TaskCycleExceeded) SetFailureFlag; } }
Model formalny został zaimplementowany w języku C na popularnym dwurdzeniowym mikrokontrolerze homogenicznym RP2040 firmy Raspberry Pi Foundation. Układ ten jest złożony z dwóch rdzeni Cortex-M0+ o maksymalnej częstotliwości taktowania wynoszącej 133 MHz. Płytę użytą do aplikacji rozwiązania przedstawiono na rys. 5. W sytuacji, gdy dwie lub więcej współpracujących aplikacji pracuje w czasie rzeczywistym, zazwyczaj zachodzi potrzeba synchronizacji zasobów. Układ RP2040 jest wyposażony w funkcje SEV (Send Event) oraz WFE (Wait For Event) [21], co umożliwia wzajemne sprzętowe powiadamianie między rdzeniami. To rozwiązanie pozwala na wymuszenie zaplanowanej akcji w drugim rdzeniu, na przykład aktywacji lub wstrzymania programu sterującego, bądź aktualizacji pamięci współdzielonej. Relacja między rdzeniami oraz kierunek wyzwalania takiego przerwania dla układu zostały przedstawione na rys. 6. W układach wielordzeniowych, w celu ochrony współdzielonego obszaru pamięci przed potencjalnymi konfliktami odczytu i zapisu, często stosuje się specjalne sprzętowe warianty semaforów. W wykorzystanym układzie zaimplementowano 32 instancje mechanizmu Spinlock [21], który można interpretować jako jednobitową flagę. Temu mechanizmowi odpowiada konstrukcja SharedFlags.InUse (pkt 5). Przykładowy pełny cykl pracy dwurdzeniowego sterownika PLC dla jednego z rdzeni został przedstawiony w listingu 5. W fazie precycle (przed wykonaniem cyklu sterowania), lokalny obszar pamięci danych maszyny wirtualnej jest aktualizowany przy użyciu globalnych zmiennych o atrybucie READ. Następnie realizowana jest faza obliczeniowa, w której maszyna wirtualna interpretuje przygotowany binarny kod sterowania. Na zakończenie, w fazie postcycle, pamięć współdzielona jest aktualizowana o nowe wartości zmiennych z atrybutem WRITE. Każda operacja modyfikacji obszaru pamięci współdzielonej podlega obowiązkowemu zablokowaniu semafora przed rozpoczęciem kopiowania, a następnie zwolnieniu go po zakończeniu. Odczyt bieżących wartości do pamięci współdzielonej odbywa się w analogiczny sposób. Funkcje CPDev. CopyDataMemToShareMem() oraz CPDev.CopyDataMemToShareMem() kopiują wartości zmiennych globalnych między
Rys. 5. Płyta deweloperska z układem RP2040
Fig. 5. Development board with RP2040 chip
SEV WFE
Rdzeń 1
Rdzeń 2
SEV WFE
Rys. 6. Zależność między rdzeniami układu RP2040 w oparciu o m echanizm SEV i WFE
Fig. 6. The relationship between the cores of the RP2040 system based on the SEV and WFE mechanism
pamięcią lokalną i globalną. Efektywność tego kopiowania zależy od ułożenia zmiennych w pamięci oraz ograniczeń platformy sprzętowej [4].
//precycle
while (SpinlockInUse(spinlock1)) { if (CPDev.CheckTaskCycleExceeded())
CPDev.RunCycle(); //postcycle while (SpinlockInUse(spinlock1)) { if (CPDev.CheckTaskCycleExceeded()) CPDev.SetFailureFlag();} SpinlockTake(spinlock1); CPDev.CopyDataMemToShareMem(); SpinlockGive(spinlock1);
Listing 5. Fragment implementacji jednej z instancji dwurdzeniowego sterownika PLC na układzie RP2040
Listing 5. A fragment of the implementation of one of the instances of a dual-core PLC controller on the RP2040 chip
7. Podsumowanie
W ramach prezentowanej pracy przedstawiono architekturę i model dwurdzeniowego sterownika PLC, który bazuje na maszynie wirtualnej. Denotacyjny model semantyczny opisuje jej działanie, polegające na wykonywaniu projektów sterujących opracowanych zgodnie z normą IEC 61131-3. Do realizacji dwurdzeniowego sterownika opracowano mechanizm wymiany informacji między projektami, wykorzystujący współdzielony obszar pamięci. Ten fragment został zabezpieczony przed potencjalnymi błędami odczytu aktualnie modyfikowanego obszaru.
Implementacja oparta jest na przygotowanych równaniach denotacyjnych, które modelują dwie współpracujące maszyny wirtualne, co umożliwia wykonywanie dwóch projektów. Rozwiązanie zostało zaimplementowane w języku C/C++ na dwurdzeniowym mikrokontrolerze homogenicznym RP2040. Do zapewnienia wzajemnego wykluczania podczas dostępu do współdzielonego obszaru pamięci wykorzystano sprzętowe mechanizmy układu. Utworzony prototyp, wykorzystujący ekonomiczne układy sprzętowe, wskazuje, że jest możliwe jednoczesne sterowanie dwoma obiektami w czasie rzeczywistym, co zazwyczaj wymagałoby zastosowania dwóch osobnych sterowników.
Bibliografia
1. Becker M., Sandström K., Behnam M., Nolte T., A Many-Core Based Execution Framework for IEC 61131-3. [In:] Proceedings of the IECON 2015 – 41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 2015, DOI: 10.1109/IECON.2015.7392805.
2. Cisek J., Mikluszka W., Swider Z., Trybus L., A Low-Cost DCS with Multifunction Instruments and CAN Bus, „IFAC Proceedings Volumes”, Vol. 34, No. 29, 2001, 64–69, DOI: 10.1016/S1474-6670(17)32794-5.
3. Gordon M., The Denotational Description of Programming Languages, Springer-Verlag, New York, 1979.
4. Hubacz M., Trybus B., Data Alignment on Embedded CPUs for Programmable Control Devices, „Electronics”, Vol. 11, No. 14, 2022, DOI: 10.3390/electronics11142174.
5. Hubacz M., Trybus B., Dual-Core PLC for Cooperating Projects with Software Implementation, “Electronics”, Vol. 12, No. 23, 2023, DOI: 10.3390/electronics12234730.
6. John K.H., Tiegelkamp M., IEC 61131-3: Programming Industrial Automation Systems, Springer, Berlin/Heidelberg, Germany, 2010.
8. Sadolewski J., Trybus B., Compiler and virtual machine of a multiplatform control environment, “Bulletin of the Polish Academy of Sciences Technical Sciences”, Vol. 70, No. 2, 2022, DOI: 10.24425/bpasts.2022.140554.
9. Schmidt D., Denotational Semantics: A Methodology for Language Development. Kansas State University, Department of Computing and Information Sciences, Manhattan, 1997.
10. Slonneger K., Kurtz B.L., Formal Syntax and Semantics of Programming Languages: A Laboratory-Based Approach, Addison-Wesley Publishing Company, 1995.
11. Stoy J., Denotational Semantics: The Scott–Strachey approach to programming language theory, Massachusetts Institute of Technology, 1979.
12. Trybus B., Development and Implementation of IEC 61131-3 Virtual Machine, „Theoretical and Applied Informatics”, Vol. 23, No. 1, 2011, 21–35.
Inne źródła
13. [www.beckhoff.com/en-en/products/ipc/embedded-pcs/ cx8200-arm-cortex-a53/] – CX8200|Embedded PC Series (Compact Controller). Beckhoff Automation (1 grudnia 2023).
14. [www.phoenixcontact.com/en-gb/products/plcs-controllersand-i-os/automation-technology-for-plcnext-technology] –Automation Technology for PLCnext Technology. Phoenix Contact (1 grudnia 2023).
15. [www.openampproject.org/] – The OpenAMP Project (1 grudnia 2023).
19. ECMA-335 Standard Common Language Infrastructure (CLI), ECMA, Geneva, 2012.
20. Barendregt H., Barendsen E., Introduction to Lambda Calculus, 2000, [ftp://ftp.cs.ru.nl/pub/CompMath.Found/lambda.pdf].
21. [https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf] – RP2040 Datasheet (1 grudnia 2023).
Model and Implementation of a Dual-Core Programmable Controller Based on a Virtual Machine
Abstract: The concept, semantic model, and prototype implementation of a dual-core programmable controller have been presented. The controller’s design concept involves parallel processing of two execution programs through a virtual machine, utilizing a shared memory area for global variables. The presented model provides a formal description of the execution of portable binary programs created based on the languages of the IEC 61131-3 standard in the CPDev programming environment. The architecture described outlines the operation of the virtual machine using abstract algebraic objects. The solution has been implemented in C/C++ on a dual-core microcontroller platform.
W 2019 r. ukończył studia na Wydziale Elektrotechniki i Informatyki Politechniki Rzeszowskiej – kierunek Automatyka i Robotyka oraz Informatyka. Obecnie Asystent w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Jego główne zainteresowania dotyczą robotyki, elektroniki, systemów wbudowanych oraz druku 3D.
dr inż. Bartosz Trybus btrybus@kia.prz.edu.pl
ORCID: 0000-0002-4588-3973
Adiunkt w Katedrze Informatyki i Automatyki Politechniki Rzeszowskiej. Ukończył studia na Wydziale Elektrycznym, Automatyki, Informatyki i Elektroniki AGH w Krakowie. Doktorat z informatyki uzyskał w 2004 r. Jego główne badania dotyczą systemów czasu rzeczywistego i środowisk wykonawczych oprogramowania sterującego.
dr inż. Jan Sadolewski jsad@prz.edu.pl
ORCID: 0000-0001-7370-9027
Absolwent Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej (2006 r.). W 2012 r. uzyskał stopień doktora nauk technicznych w dyscyplinie informatyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej w Gliwicach. Jego zainteresowania naukowe koncentrują się wokół języków programowania, tworzenia kompilatorów oraz środowisk wykonawczych.
Marcin Hubacz, Jan Sadolewski, Bartosz Trybus
Zastosowanie Metody Elementów Skończonych do analizy metody określania rozmiaru buta na podstawie pomiarów pola magnetycznego
Paweł Nowak
Politechnika Warszawska, Wydział Mechatroniki, Instytut Metrologii i Inżynierii Biomedycznej, ul. Św. A. Boboli 8, 02-525 Warszawa, Poland
Michał Nowicki, Piotr Gazda
Efiter Sp. z o.o., Aleja T. Kościuszki 80/82 / 604, 90-437 Łódź
Piotr Frydrych
Fundacja Katalizator Technologii, Kożuchowska 3 / 1, 04-715 Warszawa, Polska
Natalia Nowicka
Instytut Kolejnictwa, Laboratorium Metrologii, ul. Chłopickiego 50, 04-275 Warszawa
Roman Szewczyk
Sieć Badawcza Łukasiewicz – Przemysłowy Instytut Automatyki i Pomiarów PIAP, Al. Jerozolimskie 202, 02-486 Warszawa
Streszczenie: W artykule przedstawiono zastosowanie Metody Elementów Skończonych (MES) do analizy przydatności metody określania rozmiaru buta na podstawie pomiarów magnetowizyjnych. Zaproponowano metodę pomiarową wykorzystującą zaburzenie jednorodnego (np. ziemskiego) pola magnetycznego przez sypki materiał o wysokiej przenikalności magnetycznej, umieszczany we wnętrzu buta i dostosowujący się do jego kształtu. Kolejnym etapem określenia rozmiaru buta był pomiar pola magnetycznego przez matrycę sensorów oraz przekształcenie odwrotne, wykorzystujące dopasowanie położenia matrycy do referencyjnego rozkładu pola magnetycznego, uzyskanego za pomocą MES (przekształcenie odwrotne). Na podstawie dopasowanych parametrów położenia matrycy określano proporcję między zmierzonym a modelowym rozmiarem buta. Omówiono numeryczne przekształcenie proste, umożliwiające generowanie trójwymiarowej tablicy pola magnetycznego i przeprowadzono udane testy przekształcenia odwrotnego. W kolejnych krokach przeprowadzono testy przekształcenia odwrotnego z uwzględnieniem szumu pomiarowego. Za pomocą MES zrealizowano przekształcenie proste dla modelu buta z wkrętem i przeprowadzono próbę przekształcenia odwrotnego dla danych wzorcowych. Zarówno wpływ szumu pomiarowego, jak i obecność dodatkowego materiału spowodowały, że proponowana metoda pomiarowa nie może być praktycznie wdrożona.
Słowa kluczowe: Metoda Elementów Skończonych, magnetowizja, przekształcenie odwrotne, przekształcenie proste, określenie rozmiaru buta
1. Wprowadzenie
Rynek handlu internetowego odzieżą (e-commerce) to jedna z najbardziej dynamicznie rozwijających się branży ostatnich lat, co było widoczne zwłaszcza podczas pandemii Covid-19 i związanych z nią rozwiązaniami prawnymi, tzw. lockdownami.
Autor korespondujący:
Paweł Nowak, pawel.nowak2@pw.edu.pl
Artykuł recenzowany nadesłany 03.04.2024 r., przyjęty do druku 22.07.2024 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
Jednym z największych problemów w branży jest stopień zwrotu zamówień, związany z błędnym określeniem rozmiaru noszonego odzienia w porównaniu do rozmiarówki producenta. Jedną z propozycji rozwiązania tego problemu jest innowacyjny system pomiaru i dopasowania obuwia przez porównanie stopy kupującego do wymiarów wnętrza buta. Projektowany system składa się z dwóch modułów – aplikacji na urządzenia mobilne, umożliwiającej określenie wymiarów stopy indywidualnego użytkownika oraz systemu określającego realny rozmiar wnętrza zamawianego buta. Druga strona systemu byłaby wykorzystywana przez producentów lub dostawców obuwia (zwłaszcza sklepów internetowych). Na podstawie danych z dwóch modułów projektowany system umożliwi dobór zamawianych butów do wymiarów stopy zamawiającego, co znacząco zmniejszy liczbę zwrotów, doprowadzi do większej satysfakcji użytkowników i zwiększy obroty sklepów korzystających z systemu. Jedną z rozważanych metod określenia wnętrza buta jest metoda
łącząca magnetowizję i przekształcenie odwrotne, dopasowujące dane pomiarowe do modelowych, uzyskanych za pomocą Metody Elementów Skończonych MES. Ze względu na wstępny charakter badań opisanych w artykule jako rozmiar buta przyjęto jego jednoparametrową skalę względem wzorcowego modelu, którą można przeliczyć na długość stopy. Planowane jest rozwinięcie modelu buta o większą liczbę parametrów.
2. Opis metody pomiarowej
Zaproponowana metoda określania rozmiaru buta bazuje na statycznych pomiarach rozkładu pola magnetycznego w środowisku zaburzonym obecnością materiału o wyższej od powietrza przenikalności magnetycznej. Badany but jest wypełniany sypkim i drobnym materiałem o wysokiej względnej przenikalności magnetycznej (np. pył żelazny lub drobne stalowe kulki). Materiał ten przyjmuje kształt wnętrza badanego buta i zaburza rozkład pola magnetycznego ziemskiego [1, 2], bądź zewnętrznego, zadawanego np. za pomocą cewek Helmholtza [3].
Zaburzone pole magnetyczne jest mierzone przez macierz dziewięciu sensorów rozmieszczonych na planie kwadratu, umieszczonych pod butem. Następnie zmierzone wartości pola magnetycznego jest normalizowane względem środkowego sensora, tak aby operować wartościami będącymi stosunkami pola w poszczególnych punktach pomiarowych a nie absolutnymi wartościami. Normalizacja wartości minimalizuje błąd związany z przekoszeniem matrycy pomiarowej względem zewnętrznego jednorodnego pola magnetycznego.
Określenie rozmiaru buta odbędzie się przez porównanie zmierzonego rozkładu zaburzonego pola magnetycznego do rozkładu wzorcowego, wymodelowanego za pomocą MES dla wzorcowego modelu buta. Porównanie to odbywa się na drodze ciągłej optymalizacji parametrów określających pozycję macierzy sensorów. Parametry te przedstawiono na rys. 1 i są to: a – odległość między sensorami, @ – kąt obrotu macierzy sensorów, x, y – współrzędne środkowego sensora.
Znajomość tych parametrów umożliwia jednoznaczne wyliczenie pozycji wszystkich sensorów na podstawie podstawowych zależności geometrycznych.
Wektor zmierzonych i znormalizowanych (względem sensora środkowego) wartości pola magnetycznego jest wektorem wejściowym dla algorytmu optymalizującego. Funkcją celu algorytmu jest minimalizacja różnicy średniokwadratowej pomiędzy zmierzonymi a obliczonymi znormalizowanymi wartościami pola
Fig. 1. Schematic representation magnetometers matrix parameters which are optimized in the process
magnetycznego. Zastosowano sympleksową metodę spadku [4] oraz algorytmy ewolucyjne zaimplementowane w środowisku Octave [5]. Zmienną zawierającą informację o rozmiarze buta jest odległość między sensorami a. Pozostałe zmienne służą jedynie do wiarygodnego numerycznego odtworzenia procesu pomiarowego. Umożliwiają one zamodelowanie oraz kompensację wpływu nieidealnego ustawienia buta na platformie pomiarowej.
3. Numeryczne przekształcenie proste
Dane wzorcowe o rozkładzie pola magnetycznego w obrębie buta wypełnionego substancją o wyższej przenikalności magnetycznej uzyskano za pomocą modelowania MES. Wykorzystano pakiet programów współpracujących. Siatkę skończenie elementową zrealizowano w programie Netgen [6], natomiast obliczenia zostały wykonane w programie ElmerFEM [7]. Oprogramowanie ElmerFEM rozwiązuje równania Maxwella z zastosowaniem modelu AV [8].
Wzorcowy model buta umieszczono w walcu o wymiarach (średnicy oraz wysokości) znacząco przekraczających wymiary buta. Umożliwia to wiarygodne zasymulowanie jednorodnego pola magnetycznego w przestrzeni dookoła badanego buta. Przykładowy widok siatki skończenie elementowej przedstawiono na rys. 2. Model buta umieszczony jest w geometrycznym środku walca. Walec pełni kluczowe funkcje przy modelowaniu MES – jego ściana boczna służy do zadawania warunku brzegowego Dirichleta dla skalarnego potencjału elektrycznego V. Podstawy walca służą do zadawania jednorodnego pola magnetycznego, co umożliwia zarówno symulowanie pomiaru w polu ziemskim, jak i w cewkach Helmholtza, umożliwiających zadanie wyższych wartości jednorodnego pola magnetycznego. Elementy skończone wewnątrz walca służą modelowaniu powietrza, w którym rozchodzi się pole magnetyczne.
Obliczenia z zastosowaniem MES zostały przeprowadzone w programie ElmerFEM z zastosowaniem modułu do trójwymiarowych obliczeń magnetodynamicznych. Omawiana symulacja ma charakter statyczny (wszystkie wartości pól są niezmienne w czasie), co dla stosowanego modułu MES jest przypadkiem szczególnym. Jako wymuszenie, w symulacji zadano jednostkowy jednorodny strumień indukcji magnetycznej na podstawach walca. Model buta miał zadaną względną przenikalność magnetyczną wynoszącą 25. Przykładowe wizualizacje rozkładów pola przedstawiają rys. 3–6. Wszystkie wyniki wartości indukcji są podane w teslach. Należy zwrócić uwagę, że na potrzeby symulacji zadano jednorodny strumień indukcji magne-
Rys. 2. Widok przekroju zastosowanej siatki skończenie elementowej
Fig. 2. Clip of utilized finite element mesh
Rys.
Rys. 3. Kierunki wektorów pola magnetycznego w poszczególnych węzłach siatki – widok ogólny
Fig. 3. Directions of magnetic flux vectors in vertices of the mesh – general view
Rys. 4. Kierunki wektorów pola magnetycznego w poszczególnych węzłach siatki – przybliżenie na obszar buta
Fig. 4. Directions of magnetic flux vectors in vertices of the mesh – zoom into area around the shoe
Rys. 5. Rozkład indukcji magnetycznej w płaszczyźnie pod butem – widok od dołu
Fig. 5. Distribution of magnetic flux density in plane under the shoe – view form the bottom of the shoe
Rys. 6. Rozkład indukcji magnetycznej w płaszczyźnie pod butem – widok góry wraz z widocznymi wektorami przedstawiającymi kierunek pola magnetycznego w poszczególnych węzłach siatki
Fig. 6. Distribution of magnetic flux density in plane under the shoe – view form the top of the shoe together with vectors representing the direction of magnetic flux in mesh vertices
tycznej w podstawach walca o wartości 10 mT. Jest to wartość możliwa do uzyskania w układzie cewek Helhmholtza, omawiane tu symulacje były prowadzone jedynie w celu potwierdzenia wpływu obiektu o podwyższonej przenikalności na rozkład pola magnetycznego. W dalszych symulacjach stosowano wymuszenie odpowiadające wartości pola na stanowisku pomiarowym wyposażonym w zaprojektowane i wykonane cewki Helmholtza. Obliczenia MES potwierdzają założenia metody pomiarowej. Widoczny jest wyraźny wpływ obecności materiału o wyższej przenikalności magnetycznej na rozkład pola magnetycznego. Zaburzany jest zarówno kierunek wektorów w okolicy modelu buta, jak i zmieniają się wartości pola w poszczególnych elementach siatki skończenie elementowej.
4. Przekształcenie odwrotne na danych referencyjnych (FEM)
Opisane modelowanie z zastosowaniem MES przeprowadzono raz. Następnie wartości pola magnetycznego w obszarze pod butem (w zakresach –500, 500 w osi X, –250, 0 w osi Y oraz –200, 200 w osi Z) zapisano z próbkowaniem co 2 mm w tzw. trójwymiarowej tablicy pola.
Odtworzenie procedury pomiaru dla macierzy opisanej danymi parametrami (a, x, y, @) przebiega w następujący sposób: na bazie podstawowych zależności geometrycznych i schematu (rys. 2) obliczane są współrzędne wszystkich sensorów w macierzy dla danych parametrów; sprawdzane jest, czy sensor znajduje się w węźle trójwymiarowej tablicy pola. Możliwe są dwa rezultaty tego sprawdzenia i wynikające z tego zachowania algorytmu: współrzędne sensora idealnie pokrywają się z węzłem trójwymiarowej tablicy pola. Wtedy wartość pola „zmierzona” przez dany sensor odpowiada wartości z tego węzła trójwymiarowej tablicy pola, współrzędne sensora nie pokrywają się z węzłem trójwymiarowej tablicy pola. W tym wypadku wynik „pomiaru” wartości pola jest obliczany na podstawie interpolacji dwusześciennej [9] na podstawie wartości w najbliższych ośmiu węzłach trójwymiarowej tablicy pola, wyznaczone wartości pola magnetycznego „zmierzone” przez poszczególne sensory są normalizowane względem sensora środkowego, uzyskiwany jest wektor znormalizowanych wartości pola magnetycznego dla danego położenia macierzy.
Zaimplementowano procedurę przekształcenia odwrotnego, bazującego na metodach optymalizacyjnych. Celem przekształcenia odwrotnego jest określenie i znalezienie takich parametrów macierzy, dla których uzyskana będzie najwyższa zgodność dla wektorów znormalizowanych wartości pola magnetycznego. Funkcją celu dla metody optymalizacyjnej jest minimalizacja funkcjonału (1):
2 1 n ZiSzi i BB Q n = ∑ (1)
gdzie: Q – wartość funkcji celu dla algorytmu optymalizacji (współczynnik jakości dopasowania), n – liczba punktów w macierzy sensorów – tutaj n = 9, BZi – wartość znormalizowanego zmierzonego pola magnetycznego w i-tym sensorze, BSzi – wartość znormalizowanego szukanego pola magnetycznego w i-tym sensorze dla danych parametrów macierzy sensorów.
Wartości B z (zadane) były pobierane dla zadanych parametrów macierzy sensorów z tej samej trójwymiarowej tablicy pola, co wartości BSz (szukane). Oznacza to, że wartość funkcji celu mogła osiągnąć wartość 0, jeśli szukane wartości parametrów macierzy będą identyczne, jak te zadane.
Pierwsze testy metody zrealizowano za pomocą optymalizacji metodą Neldera-Meada. Jest to podstawowa metoda optymalizacyjna, służąca do wyznaczania minimum funkcji wielu zmiennych, w tym nieróżniczkowalnych. Metoda Neldera-Meada wymaga podania punktu początkowego funkcji, dla którego rozpoczynane jest przeszukiwanie przestrzeni rozwiązań. Punkt ten był losowo generowany w rozsądnym przedziale dla każdego z szukanych parametrów macierzy sensorów. Uzyskane wyniki potwierdzają poprawność implementacji metody – wartość funkcji testowej dla wektora szukanego wynosiła 0. Szukane parametry macierzy sensorów były zbliżone do wartości zadanych (tab. 1).
Należy zwrócić uwagę na dużą zgodność między uzyskanymi a zadanymi wartościami parametrów macierzy sensorów, szczególnie a, x i y. Parametr @ został wyznaczony niepoprawnie, jednak odpowiada on jedynie za położenie kątowe macierzy sensorów i nie niesie żadnej informacji o rozmiarze buta. Analogicznie, parametry x i y są jedynie parametrami pomocniczymi, umożliwiającymi wierne odtworzenie procesu pomiarowego (błędne umiejscowienie buta nad płaszczyzną sensorów). Jedynym istotnym parametrem jest a, wyznaczony z bardzo dużą dokładnością przy bardzo odległym punkcie początkowym. Testy zaimplementowanej metody przeprowadzano wielokrotnie dla różnych zadanych parametrów macierzy sensorów. Wszystkie uzyskiwane wyniki były akceptowalnej dokładności (odchylenie standardowe parametru a wynosiło mniej niż 2 % zadanej wartości, co umożliwiła jednoznaczne przypisanie rozmiaru buta do wyników obliczeń). Średni czas realizacji obliczeń na komputerze klasy PC, wynosił 84 s, co jest czasem jak najbardziej akceptowalnym przy zagadnieniach odwrotnych.
5. Przekształcenie odwrotne na zaszumionych danych pomiarowych
Kolejnym krokiem w celu lepszego zamodelowania procesu pomiarowego było uwzględnienie niepewności pomiaru za pomocą stosowanej macierzy sensorów. Przeprowadzono również nowe modelowanie z zastosowaniem MES jak w rozdziale 2 ze zmienionymi warunkami brzegowymi. Zmieniona została wartość strumienia indukcji magnetycznej na podstawach walca, tak aby uzyskać wartości mierzonego pola zgodne z wartościami mierzonymi przez stanowisko pomiarowe w sytuacji, gdy cewki Helmholtza są zasilane prądem 5 A (600 µT).
Tab. 1. Przykładowe wyniki przekształcenia odwrotnego, przy pracy na danych wzorcowych Tab. 1. Exemplary results of inverse transformation when operating on reference data
Parametr a [mm] x [mm] y [mm] @ [°]
Następnie uwzględniono niepewność sensorów w procesie pomiarów. Na podstawie analizy statystycznej wyników przeprowadzonych pomiarów, oszacowano tę niepewność na 1,5 µT. Każdy z wyników umieszczanych w wektorze B z (zadanych) był, przed znormalizowaniem względem środkowego sensora, zaszumiany losową wartością z przedziału od –1,5 µT do 1,5 µT. Procedura przekształcenia odwrotnego przebiegała analogicznie, jak w przypadku danych referencyjnych. Przeszukiwana trójwymiarowa tablica pola nie była obarczona losowym szumem pomiarowym. W tym przypadku wartość funkcji testowej (wartość funkcji celu dla wektora zadanych parametrów macierzy sensorów) nie wynosi 0.
Wykorzystywano optymalizację metodą Neldera-Meada z losowo generowanym punktem początkowym oraz metodę optymalizacji ewolucyjnej. Obie metody zwracały bardzo zbliżone wyniki, jednak metoda optymalizacji ewolucyjnej była obarczona wyższym kosztem obliczeniowym (tab. 2 i 3).
Akceptowalne rezultaty przekształcenia odwrotnego (tab. 2) zostały osiągnięte mimo uwzględnienia w modelowaniu procesu pomiarowego niepewności pomiarowej sensorów. Prawdopodobnie wartości „szumu”, zaburzające wartości wektora szukanego, zostały wylosowane blisko 0 i nie wpłynęło to znacząco na procedurę przekształcenia odwrotnego.
W przypadku wyników nieakceptowalnych (tab. 3), widoczny jest wyraźny wpływ szumu pomiarowego na wyniki przekształcenia odwrotnego. Kluczowy z określanych parametrów macierzy sensorów (a) był wyznaczony z błędem 8 %, co jest wartością niedopuszczalną. Jest to niewątpliwie spowodowane tym, że wartości szumu zaburzające wartości wektora szukanego zostały wylosowane wystarczająco duże.
W celu określenia wpływu przekształcenia odwrotnego na szum pomiarowy przeprowadzono serię 20 powtórzeń algorytmu. Akceptowalne wyniki parametru a (nieodbiegające od wartości zadanej o więcej niż 2 %), uzyskano jedynie w siedmiu przypadkach. Można stwierdzić, że przedstawiona metoda przekształcenia odwrotnego jest wrażliwa na szum pomiarowy i uzyskane wyniki są obarczone nieakceptowalnym błędem w 65 % procentach przypadków, co powoduje, że nie nadaje się do zastosowań praktycznych i wdrożenia.
6. Przekształcenie odwrotne przy uwzględnieniu występowania materiału ferromagnetycznego w pięcie buta
Zjawiskiem zaobserwowanym przy pomiarach niektórych butów, było przyciąganie kulki magnetycznej (wykorzystywanej do innej testowanej metody określania wymiarów wnętrza mierzonego buta) do okolic pięty (obcasa) badanego buta. Było to spowodowane występowaniem materiału o wysokiej przenikalności magnetycznej (prawdopodobnie były to gwoździe lub wkręty służące do przytwierdzenia obcasa do podeszwy buta). Zjawisko to miało duży wpływ na przeprowadzane pomiary ze względu na zaburzenie rozkładu pola magnetycznego. Przeprowadzono symulację wpływu występowania materiału ferromagnetycznego na wyniki przedstawionego przekształcenia odwrotnego.
W tym celu konieczne było zmodyfikowanie siatki skończenie elementowej, przez dodanie odpowiedniego elementu symulującego gwóźdź w obszarze pięty (rys. 7 i 8).
Dla opracowanej siatki przeprowadzono modelowanie magnetostatyczne z zastosowaniem MES jak w rozdziale 2. Względna przenikalność magnetyczna materiału wypełniającego wnętrze buta wynosiła 25, natomiast „gwoździa” – 125. Przykładowe wizualizacje uzyskanego rozkładu przedstawiono na rys. 9.
Widoczny jest wpływ materiału o wysokiej przenikalności w okolicy pięty modelowanego buta. Wprowadzane są zaburzenia w rozkładzie wektorów pola magnetycznego.
Przeprowadzono testowe przekształcenia odwrotne. Wektor danych zadanych był pobierany z wyników symulacji dla buta z gwoździem, natomiast wektor danych szukanych był określany w wynikach symulacji dla buta bez gwoździa, według metodyki opisanej w rozdziale 3.
Uzyskane wyniki (tab. 4) jednoznacznie p okazują, że zaproponowana metoda nie nadaje się do wyznaczania rozmiaru buta w przypadku, gdy rozkład pola magnetycznego jest zaburzany obiektem o dużej przenikalności magnetycznej. Powoduje to znaczną zmianę rozkładu pola magnetycznego względem
Tab. 2. Przykładowe akceptowalne wyniki przekształcenia odwrotnego, przy uwzględnieniu szumu pomiarowego. Pogrubiono kluczowy określany parametr
Tab. 2. Exemplary acceptable results of inverse transformation with measurement noise. Crucial parameter is bolded
Tab. 3. Przykładowe nieakceptowalne wyniki przekształcenia odwrotnego, przy uwzględnieniu szumu pomiarowego. Pogrubiono kluczowy określany parametr
Tab. 3. Exemplary unacceptable results of inverse transformation with measurement noise. Crucial parameter is bolded
Tab. 4. Przykładowe wyniki przekształcenia odwrotnego, przy występowaniu dodatkowego materiału zaburzającego rozkład pola magnetycznego. Pogrubiono kluczowy określany parametr
Tab. 4. Exemplary results of inverse transformation with additional material, which influences the distribution of magnetic field. Crucial parameter is bolded
Rys. 7. Widok zmodyfikowanej siatki skończenie elementowej wraz gwoździem (zaznaczonym strzałką)
Fig.7. View of modified finite element mesh with additional model of a nail (marked with the arrow)
Rys. 8. Przybliżenie na model buta wraz z gwoździem w podeszwie (zaznaczonym strzałką)
Fig. 8. Zoom on the shoe model mesh with additional model of a nail (marked with the arrow)
Rys. 9. Wektory pola magnetycznego w poszczególnych węzłach siatki – przybliżenie na obszar buta
Fig. 9. Vectors of magnetic flux in mesh vertices – zoom into area around the shoe
wzorcowego, który jest przeszukiwany pod kątem znalezienia odpowiedniego rozwiązania.
7. Podsumowanie
Przedstawiono metodę określania rozmiaru buta na podstawie pomiarów rozkładu pola magnetycznego oraz optymalizacyjnego rozwiązania zagadnienia odwrotnego. Metoda ta działa w warunkach idealnych – gdy sensory nie są obarczone żadną niepewnością oraz gdy nic (poza samym wnętrzem badanego buta) nie zaburza rozkładu mierzonego pola. Metoda zwraca wyniki szybko, wiarygodnie i z dużą powtarzalnością.
Przy uwzględnieniu realnych problemów związanych zarówno z niedoskonałością sensorów pola magnetycznego, jak i niekorzystnych, z punktu widzenia metody pomiarowej, cech konstrukcyjnych niektórych rodzajów obuwia, metoda ta nie zapewnia akceptowalnej powtarzalności i dokładności.
Podziękowania
Praca naukowa jest efektem projektu POIR.01.01.01-000359/19 „Innowacyjny system pomiaru i dopasowywania rozmiaru obuwia” realizowanego w ramach konkursu Narodowego Centrum Badań i Rozwoju „Szybka ścieżka Dostępność Plus”, współfinansowanego przez Unię Europejską ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Inteligentny Rozwój na lata 2014–2020.
Bibliografia
1. Nowicki M., Szewczyk R., Determination of the location and magnetic moment of ferromagnetic objects based on the analysis of magnetovision measurements, “Sensors”, Vol. 19, No. 2, DOI: 10.3390/s19020337.
2. Billings S., Field measurements of induced and remanent moments of unexploded ordnance and shrapnel, “IEEE Transactions on Geoscience and Remote Sensing”, Vol. 47, No. 3, 2008, 815–827, DOI: 10.1109/TGRS.2008.2005112.
3. Tumański S., Handbook of magnetic measurements. CRC press, 2016.
4. Olsson D.M., Nelson L.S., The Nelder-Mead simplex procedure for function minimization. “Technometrics”, Vol. 17, No. 1, 1975, 45–51, DOI: 10.1080/00401706.1975.10489269.
5. Ashlock D., Evolutionary computation for modeling and optimization. New York: Springer, 2006, DOI: 10.1007/0-387-31909-3.
7. Malinen M., Råback P., Elmer finite element solver for multiphysics and multiscale problems. “Multiscale Modelling Methods for Applications in Materials Science”, Vol. 19, 2013, 101–113.
8. Napieralska-Juszczak E., Komęza K., Modelowanie pola elektromagnetycznego w rdzeniach anizotropowych, Politechnika Łódzka, 2012.
9. Hall C.A., Bicubic interpolation over triangles. “Journal of Mathematics and Mechanics”, Vol. 19, No. 1, 1969, 1–11.
Utilization of Finite Element Method for Analysis of Shoe Size Assessment Method Based on Magnetic Field Measurements
Abstract: Paper presents utilization of Finite Element Method (FEM) for analysis of usefulness of shoe size assessment method, based on magnetovision measurements. Measurement method based on disturbances of the uniform magnetic field (e.g. Earth’s magnetic field) is presented. Disturbances are caused by loose material of high magnetic permeability placed inside the tested shoe, which adapts to the insides of the shoe. The disturbed magnetic field is measured by the matrix of magnetometers. The values of magnetic field are an input into inverse transformation algorithm which fits the position of matrix sensors into the reference (obtained by FEM) distribution of magnetic field. Based on the fitted parameters of sensors matrix a ratio between the measured and reference shoe size was determined. A FEM-based forward transformation is presented, which allows for generation of three-dimensional array of magnetic field distribution. Initial tests of inverse transformation were conducted successfully. Next steps consisted of tests of inverse transformation method with an inclusion of the typical measurement noise. A FEM-based forward transformation was conducted of a modified shoe model (including simplified screw model). Inverse transformation was conducted but both influence of measurement noise, as well as the presence of additional high permeability material, resulted that the presented shoe size assessment method is not suitable for practical implementation.
Główny wykonawca w projekcie „Innowacyjny system pomiaru i dopasowywania rozmiaru obuwia”. Pracuje w Instytucie Metrologii i Inżynierii Biomedycznej Wydziału Mechatroniki Politechniki Warszawskiej. W pracy naukowej zajmuje się szeroko zakrojoną tematyką związaną z baniem i modelo waniem zjawisk magnetycznych i magnetomechanicznych pod kątem opracowań innowacyjnych systemów i urządzeń pomiarowych.
dr inż. Piotr Gazda
piotr.gazda92@gmail.com
ORCID: 0000-0002-6017-6134
Główny wykonawca w projekcie „Innowacyjny system pomiaru i dopasowywania rozmiaru obuwia”. W pracy naukowej zajmuje się rozwojem metod pomiarowych oraz innowacyjnych stanowisk badawczych, zwłaszcza w zakresie zjawisk magnetoelektrycznych. Prowadzi również badania nad wykorzystaniem sztucznej inteligencji w s ystemach pomiarowych.
dr inż. Michał Nowicki michal.nowicki@pw.edu.pl
ORCID: 0000-0003-2513-952X
Kierownik B+R projektu „Innowacyjny system pomiaru i dopasowywania rozmiaru obuwia”, firma Efiter Sp. z o.o. Pracuje w Instytucie Metrologii i Inżynierii Biomedycznej Wydziału Mechatroniki Politechniki Warszawskiej oraz na Wydziale Mechanicznym Wileńskiego Uniwersytetu Technicznego. Brał udział w międzynarodowych projektach badawczych we współpracy z ośrodkami naukowymi w Chinach, na Litwie, Słowacji i Ukrainie. Pasjonat nieszablonowych rozwiązań. Laureat nagród z obszaru nauki i dydaktyki. Autor ponad 140 publikacji z zakresu magnetyzmu i sensoryki.
dr inż. Piotr Frydrych
p.frydrych@katalizatortechnologii.pl
ORCID: 0000-0002-6600-2522
Główny wykonawca w projekcie „Innowacyjny system pomiaru i dopasowywania rozmiaru obuwia”. Jest autorem licznych publikacji z zakresu modelowania, metrologii i systemów pomiarowych, jak również ekonomii. W ciągu 10 lat pracy naukowej uczestniczył w wielu projektach badawczo-rozwojowych. Pracował na Politechnice Warszawskiej. Był współwłaścicielem agencji marketingowej i pełnił tam funkcję wiceprezesa, specjalizując się w analizie i prognozowaniu poziomu sprzedaży i obrotów sklepów internetowych. Łączy środowisko naukowe i biznesowe. Wprowadza naukę w praktykę biznesu.
inż. Natalia Nowicka
nnowicka@ikolej.pl
ORCID: 0000-0002-3102-6591
Kierownik Pracowni Wielkości Elektrycznych w Labor atorium Metrologii Instytutu Kolejnictwa. Główne obszary zainteresowań to opracowywanie i automatyzacja stanowisk pomiarowych wielkości elektrycznych oraz wdrażanie nowych metod pomiarowych. Jest konsultantem w dziedzinach metrologii i systemów jakości, szczególnie w zakresie analizy niepewności pomiarowych i akredytacji laboratoriów.
prof. dr hab. inż. Roman Szewczyk roman.szewczyk@piap.lukasiewicz.gov.pl
ORCID: 0000-0002-1214-1009
Wieloletni pracownik Sieci Badawczej Łukasiewicz – Przemysłowego Instytutu Automatyki i Pomiarów PIAP. Przewodniczący 2. Grupy Roboczej ds. Cyfrowego Wspomagania Przemysłu w Zespole ds. Transformacji Przemysłowej, Ministerstwo Rozwoju (2016–2017). Członek i Z-ca Przewodniczącego 14 Grupy Roboczej ds. Sensorów (w tym biosensorów) i inteligentnych sieci sensorowych w Ministerstwie Gospodarki w ramach Programu Operacyjnego Inteligentny Rozwój (2015–2018). Koordynator projektów typu foresight, realizowanych wspólnie z przedsiębiorcami, w których zidentyfikowano kluczowe technologie i kierunki rozwoju dla województwa mazowieckiego oraz branży automatyki, robotyki, techniki pomiarowej w Polsce. Koordynator projektów w ramach Programu Badań Stosowanych (NCBiR) ukierunkowanych na najnowsze technologie, realizowanych wspólnie z krajowymi przedsiębiorcami.
Safe and Reliable Movement of Fast LiDAR-based Self-driving Vehicle
Tomasz Buratowski, Mariusz Giergiel, Piotr
Wójcicki
AGH University of Krakow, al. A. Mickiewicza 30, 30-059 Krakow, Poland
Jerzy Garus, Rafał Kot
Polish Naval Academy, Śmidowicza Street 69, 81-127 Gdynia, Poland
Abstract: Classification of objects is an important technique for autonomous ground vehicles to identify a surrounding environment and execute safe path planning. In this paper, a method based on horizontal segmentation is proposed to detect cone-shaped objects in vehicle’s vicinity using a LiDAR sensor. A captured point cloud is divided into five layers based on height information, and the division of detected objects into two groups, cones and others, has been made using classifiers available in MATLAB toolboxes. To separate the classified conical objects into four types used to mark the route, an algorithm for their recognition was developed and used. The proposed solution, verified by navigation experiments in real conditions using an unmanned racing car, has gave good results, i.e., a high rate of cone-shaped objects classification, a short processing time and a low computational load. The performed tests have allowed also to diagnose the causes of incorrect classification of objects. Thus, the experimental results indicated that the approach presented in this work can be used in real time for autonomous, collision-free driving along marked routes.
1. Introduction
Keywords: wheeled ground vehicle, autonomous driving, object classification, LiDAR device, effective data processing algorithms and efficient use of memory.
An unmanned ground vehicle (UGV) can be thought of as a robotic platform that actively interacts with its environment. Accurate surrounding perception and precise localization are key requirements for its reliable navigation and safe driving. These two tasks need the vehicle to be equipped with the following three main components, i.e., a set of sensors to perceive the external environment; a computing device to process data in real time in order to analyze the situation; actuators to carry out the required control actions.
Nowadays, light detection and ranging (LiDAR) sensors have been employed increasingly for observation of complex environment due to their advantages like high scanning accuracy, long-distance measurement, high resolution and stability. The LiDAR provides information in the form of a point cloud that can be used to identify objects around the vehicle to ensure collision-free riding. In the case of the fast-moving wheeled vehicle, this task requires the use a high-speed computing
Autor korespondujący:
Mariusz Giergiel, giergiel@agh.edu.pl
Artykuł recenzowany nadesłany15.07.2024 r., przyjęty do druku 03.09.2024 r.
In this paper, we propose a two-stage framework to detect and classify cone-shaped objects for the purposes of safe vehicle autonomous driving along a designated urban route in the shortest possible time. First, shape information is extracted from LiDAR data using classifiers available in the MATLAB toolboxes. Then, the obtained dataset is divided into four types of objects using a developed and implemented algorithm. Correct recognition of the cones makes it possible to determine the vehicle’s position in space, which is the basis for the path planning task.
The remainder of this paper is organized as follows. Section 2 documents the related works. Section 3 presents the mobile vehicle and external environment used for experimental trials. Section 4 describes a procedure for classifying objects from LiDAR data based on layered feature extraction and evaluates the effectiveness of the proposed approach. Section 5 presents a developed algorithm for the detection of cone-shaped objects and results of experiments conducted in real conditions. Conclusions are given in Section 6.
2. Related works
In In recent decades, autonomous vehicles with the perception of the environment in terms of intelligent urban traffic have been extensively studied [1–8]. In this field, effective object detection methods are sought in order to create an environmen-
tal model around the vehicle and execute path planning. To achieve a high level of perception system, sensors such as cameras, radars, lasers or LiDARs are installed in vehicles [9–18].
Currently, the last ones are used more and more often in unmanned driving [19–24]. Therefore, a lot of works are conducted for processing LiDAR data, especially in the area of autonomous navigation and movement [25–28]. Traditional detection methods from obtained 3D point clouds primarily analyze and extract features, such as geometric or shape attributes, and then classify objects by trained specific classifiers [29, 30].
The problem of object detection consists of two main topics, namely: object extraction and classification. Therefore, the point clouds are first pre-segmented, and potential objects are divided into clusters. Then a set of global features is defined and the objects are identified as a whole [31].
This work attempts to meet challenges associated with object classification from LiDAR data by means of layered feature extraction.
The concept of slicing a point cloud cluster to extract features is not new, but it is usually described as part of the system architecture rather than the independent process. An interesting review of the use of vertical point cloud segmentation to identify geometrical features of objects was presented by Kyriazis and Fudos in [32]. Spinello et al. [33] divided point clouds into several layers based on height information. Feature extraction and classifier training were then performed for each layer. They claimed to achieve overall accuracy more than 90 %. Kim et al. [34] used layer features to classify people and estimate their poses. The interesting approaches to using of layer features, based on the curvature of the object, were presented by Tombari et al. in [35]. Luo and Yan-min [36] used horizontal segmentation, plane projection, and shape fitting for rapid extraction and reconstruction of building pillars from the scene. Their approach was extended by Pu et al. [37] with percentile-based pole recognition for detecting objects such street lamps. The results showed that focusing on number of layers can have a significant impact on computational efficiency of the classification method.
Although a lot of works have been done on the layered feature extraction technique classification of objects using LiDAR data, there are still some problems that require further in-depth research. One of them is how to reduce the computational load of data processing to obtain the goal of real-time operation. During autonomous driving, nearly a hundred objects must be classified in each LiDAR frame with a range of up to 50 m, therefore low processing time is a crucial parameter, especially in the case of a fast-moving vehicle. In connection with the above the authors present a solution in this field which can facilitate the detection of cone-shaped objects. The key idea of the presented method is to determine a minimum number of layers for given objects, sufficient to classify them with an assumed accuracy. It allows to speed up time-consuming process of LiDAR data processing and reduces the size of stored data.
3. Autonomous vehicle and external environment description
The UGV shown in Figure 1, called LEM, was designed and built to meet requirements of the AGH University of Science and Technology Racing Driverless Vehicle Team. The vehicle is an example of a racing car capable of driving in autonomous mode. It is the four-wheeled vehicle that can reach speeds of up to 120 km/h. The construction has the following parameters: length – 2.8 m, height – 1.2 m, width – 1.4 m and mass about 250 kg.
A task of the vehicle was to drive as quickly as possible along a 1,000-meter route, determined according to the following rules:
a left boundary of the track was marked with small blue cones,
a right boundary of the track was marked with small yellow cones,
a maximum distance between two cones in the direction of travel was 5 m,
a maximum transverse distance between two cones was 5 m, big orange cones were placed before and behind lines marking the start and finish.
A view of the LEM vehicle among cones during the field experiment is shown in Figure 2.
A safety driving needs the vehicle to be able to detect and recognize objects in the outdoor environment. For these tasks the vehicle is equipped with the Velodyne VLP-16 LiDAR system mounted on the front spoiler (see Figure 1). This on-board perception sensor was chosen because of its advanced technical parameters, in particular reliability, power efficiency, and surround view, which makes it ideal for affordable low-speed autonomy. The LiDAR has 16 channels, measurement range up to 170 meters, accuracy ±30 mm. The key parameters of VLP-16 can be found in the reference [38].
The LiDAR is connected to the on-board NVIDIA Jetson TX2 data processing unit via the USB 3.0 interface. The unit is equipped with a Quad-core 2.0 GHz 64-bit ARMv8 A57, a dual-core 2.0 GHz ARMv8 Denver, a 256 CUDA core 1.3 MHz NVIDIA Pascal and 8 GB memory [39]. It runs under the control of
Fig. 1. A view of the LEM unmanned ground vehicle Rys. 1. Bezzałogowy pojazd naziemny LEM
Fig. 2. The LEM vehicle among cones during a test
Rys. 2. Pojazd LEM między stożkami drogowymi w czasie testu
the Linux operating systems, and provides greater than 1TFLOPS of FP16 compute performance.
4. Classification stage and data processing
Point cloud processing tools included in the Computer Vision Toolbox and Statistics and Machine Learning Toolbox were used for calculations, available via executable files generated in the MATLAB environment and coded in C++.
The objects were detected from the LiDAR data using the Euclidean clustering, under assumption that the point clouds were normalized between values 0 and 1 and divided into five layers. Examples of features extracted from the layers are depicted in Figure 3. Then the isolated objects were split into two classes, i.e., cones and others (non-cones).
Figure 4 shows the example of virtual image of the route and its immediate surroundings, obtained on the basis of processed LiDAR data (a single frame), showing detected the cones and not cones on a 50-meter long section.
An efficiency of the feature extraction procedure for different number of layers was analyzed by changing parameters in appropriate scripts. The initial number of layers was equal to 1 to set up a baseline for measuring feature extraction performance. For each layer the following parameters were calculated: −p ercent of cluster points belonging to the layer; −standard deviation for XY co ordinates; −average distance from cluster center in XY coordinates.
Fig. 3. Examples of features extracted from vertical layers Rys. 3. Przykłady cech wyodrębnionych z warstw pionowych
Fig. 4. Visualization of results of classification procedure for a single LiDAR frame
Rys. 4. Wizualizacja wyników klasyfikacji dla pojedynczej ramki systemu
Tomasz Buratowski, Mariusz Giergiel, Piotr Wójcicki, Jerzy Garus, Rafał Kot
The data set, consisting of a total of 1271 objects, was randomly divided into three subsets: training, validation, and testing in proportions of 2:1:1, respectively. The training and validation sets were used by the Classification Learner app to train the classifiers. Then, the testing set was used to evaluate the performance of the trained classifiers. The average accuracy and the true positive rate (TPR) for both classes of objects and three most effective classifiers are presented in Table 1 and Figure 5.
From the results presented in Table 1 and Figure 5, the following conclusions can be drawn: the true positive rate (TPR) values for cones and others objects are almost on the same level for each layer considered; starting with a certain number of layers, the effectiveness of the classifiers does not improve significantly as the number of layers increases.
As mentioned in Section 3, the task of the AGV was to cover the route in the shortest possible time. Therefore, low processing time per object was the basis for safe autonomous driving of the regarded racing car. The last conclusion indicates that the
appropriate selection of the number of layers can be an effective way to speed up the processing time of captured LiDAR data.
5. Cone type recognition algorithm
The input to the algorithm is a part of the LiDAR data representing the vehicle’s surrounding, consisting only of objects belonging to the cones class. A task of the algorithm is to divide this dataset into four types: big orange cones, blue cones, yellow cones and unknown (cones).
A block diagram of the algorithm is depicted in Figure 6. The first part calculates basic statistical data about the objects, i.e., cones: number of points, average intensity, standard deviation. In the next step, the point cloud is sorted according to coordinates in vertical axis (Z coordinate), using the insertion sort. This kind of solution was chosen because it works quickly for small number of elements, is simple to implement and has a low memory consumption. After sorting the algorithm extracts the height of the point cloud by subtracting the minimum of Z from the maximum of Z. Then, the algorithm checks whether the cone is the big orange cone by asses-
klasyfikatorów
trzech najlepszych klasyfikatorów w zależności od liczby warstw
Fig. 5. Efficiency of three best classifiers against number of layers
Rys. 5. Efektywność
Tab. 1. Results for different numbers of layers for the best three classifiers Tab. 1. Wyniki uzyskane dla różnych liczb warstw z użyciem trzech najlepszych
sing its size. It saves time and computational resources as the algorithm can accomplish it without checking the color layers. The next step is the isolation of layers. The algorithm goes through points, summing the intensities of points, and counts their number. If the difference between Z coordinates, (called delta), is higher than threshold it saves the number of layer points in one array and the layer average intensity in another array. If the number of layers is less than 3 it is assumed that the point cloud is too small to recognize the cone type correctly, hence the algorithm returns the cone type as unknown.
The final part of the algorithm checks whether the cone has a bright stripe. It’s done by going through the LiDAR layers, starting from the bottom. If the delta between layers is greater than standard deviation of the cone intensity, it is assumed that the border between body and stripe was reached. The standard deviation was used as a threshold due to two reasons. Firstly, the further the cone is from the LiDAR system, the smaller the dynamic range of the points intensities. Therefore, the standard deviation is a good indicator of this range. Secondly, it was tested in real conditions and for different parameters used to differentiate between the layers, the standard deviation turned out to be the most effective. Then, after checking whether
it has gone from bright to dark or vice versa, it assigns a label (a Bo olean value) to the cone indicating whether it has the bright stripe or not. Thus, the cone is treated as either blue or yellow, depending on whether it has a bright stripe, or not.
The algorithm was implemented in MATLAB and tested on the dataset containing 1910 items, all represented by five layers. Results of cones recognition are shown in Figure 7. The total number of errors was 116 and the overall efficiency of the algorithm was approximately 93 %. It can be noticed that the considered objects, i.e., the cones, are axisymmetric. Hence, it does not matter from which side the LiDAR observes the cones. The captured point cloud is more or less the same, and even if the distance from the sensor increases, the shape and proportions are retained. Nevertheless, for the classification based on statistical methods and not using artificial intelligence requiring high computer power, it is a quite good result, confirming effectiveness of proposed approach.
Detailed analysis of the results presented in Figure 7 also allows conclusions to be drawn about probable sources of errors. Most of the errors happen below the 64 and above 190 points in the cloud. These are cones in which the number of points is too small and may result of faulty clustering. This applies in particular to cones for which the distance to the sensor is less than 1.25 meters and then they are usually not fully illuminated by the laser beams. The above means that correct identification of the cone depends on the number of points in the point cloud and the distance between the object and the LiDAR sensor.
The research was carried out on a dataset consisting of the above-described items represented by three and four layers. Obtained results were like those presented in Figure 7 and suggest that focusing on number of layers can have a significant impact on the computational efficiency of the classification process. The fewer layers are analyzed the better the classifier performance.
7. Conclusions
This paper presents a method for object classification using 3D LiDAR data enabling safe operation and reliable driving in autonomous mode of the UGV. For this task, the work was focused on classification and recognition of two objects occurring in road environments: cones and others.
Firstly, the collected environmental data were processed using horizontal segmentation as the features extraction
Fig. 6. Block diagram of cone type recognition algorithm
Rys. 6. Schemat blokowy algorytmu rozpoznawania typu stożka
Fig. 7. Correlation plot between the distance of the cone and the number of points
Rys. 7. Wykres korelacji pomiędzy odległością stożka a liczbą punktów
method. The object cluster was split into five number of horizontal layers. The overall accuracy of both regarded objects achieved about 95 %. Taking into account the accuracy of the classification process, it was noticed that starting from a certain number of layers, the accuracy level did not improve significantly as the number of layers considered increases. Therefore, considering the fact that computing the features of each layer requires time and resources, specifying the sufficient number of layers could speed up the processing time of the classification procedures.
Secondly, in order to determine the vehicle’s position in space and a safe route, the recognition algorithm was introduced, dividing the detected cone-shaped objects into four types. Its overall accuracy was 93.3 %. Errors in the recognition results were also diagnosis. The worked out classification algorithm is characterized by a relatively low computational load, making it suitable for use in real-time applications in autonomous vehicles equipped with limited power computing units.
The proposed approach was tested in a real outdoor environment with the LEM AGV as an autonomous mobile platform. The obtained results showed that the classification process met the expected requirements, safe and reliable vehicle movement was ensured, and navigation objectives were achieved. The experiences showed that the distance of the cone from the sensor has a big impact on the accuracy of the classification. Therefore, in the future, it is planned to divide the process into two stages: short distance and other. This should improve the final classification quality.
Further work will focus on extending the functionality of the classification procedure so that it can be successfully applied to other classes of road objects.
References
1. Tomic T.et al., Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue, “IEEE Robotics & Automation Magazine”, Vol. 19, No. 3, 2012, 46–56, DOI: 10.1109/MRA.2012.2206473.
2. Biljecki F., Ledoux H., Van Oosterom P., Transportation mode-based segmentation and classification of movement trajectories, “International Journal of Geographical Information Science”, Vol. 27, No. 2, 2013, 385–407, DOI: 10.1080/13658816.2012.692791.
3. Mukhtar A., Xia L., Tang T.B., Vehicle detection techniques for collision avoidance systems: A review, “IEEE Transactions on Intelligent Transportation Systems”, Vol. 16, No. 5, 2015, 2318–2338, DOI: 10.1109/TITS.2015.2409109.
4. Van Brummelen J., O’Brien M., Gruyer D., Najjaran H., Autonomous vehicle perception: The technology of today and tomorrow, “Transportation Research Part C: Emerging Technologies”, Vol. 89, 2018, 384–406, DOI: 10.1016/j.trc.2018.02.012.
5. Dowling R., McGuirk P., Autonomous vehicle experiments and the city, “Urban Geography”, Vol. 43, No. 3, 2022, 409–426, DOI: 10.1080/02723638.2020.1866392.
7. Bhavana N., Kodabagi M.M., Exploring the Current State of Road Lane Detection: A Comprehensive Survey, “International Journal of Human Computations & Intelligence”, Vol. 2, No. 1, 2023, 40–46.
8. Jacyna M., Semenov I., Models of vehicle service system supply under information uncertainty, “Eksploatacja i Niezawodność”, Vol. 22, No. 4, 2020, 694–704, DOI: 10.17531/ein.2020.4.13.
9. Zhang G., Avery R.P., Wang Y., Video-based vehicle detection and classification system for real-time traffic data col-
lection using uncalibrated video cameras, “Transportation Research Record: Journal of the Transportation Research Board”, Vol. 1993, No. 1, 2007, 138–147, DOI: 10.3141/1993-19.
10. Yu Y., Guan H., Ji Z., Automated detection of urban road manhole covers using mobile laser scanning data, “IEEE Transactions on Intelligent Transportation Systems”, Vol. 16, No. 6, 2015, 3258–3269, DOI: 10.1109/TITS.2015.2413812.
11. Lehtomäki M. et al., Object classification and recognition from mobile laser scanning point clouds in a road environment, “IEEE Transactions on Geoscience and Remote Sensing”, Vol. 54, No. 2, 2015, 1226–1239, DOI: 10.1109/TGRS.2015.2476502.
12. Aamir M., Pu Y., Rahman Z., Abro W., Naeem H., Ullah F., Badr A., A hybrid proposed framework for object detection and classification, “Journal of Information Processing Systems”, Vol. 14, No. 5, 2018, 1176–1194, DOI: 10.3745/JIPS.02.0095.
13. Nebiker S., Meyer J., Blaser S., Ammann M., Rhyner S., Outdoor mobile mapping and AI-based 3D object detection with low-cost RGB-D cameras: The use case of on-street parking statistics, “Remote Sensing”, Vol. 13, No. 16, 2021, DOI: 10.3390/rs13163099.
14. Li Z., Du Y., Zhu M., Zhou S., Zhang L., A survey of 3D object detection algorithms for intelligent vehicles development, “Artificial Life and Robotics”, Vol. 27, 2021, 115–122, DOI: 10.1007/s10015-021-00711-0.
15. Wei Z., Zhang F., Chang S., Liu Y., Wu H., Feng Z., MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving: A review, “Sensors”, Vol. 22, No. 7, 2022, DOI: 10.3390/s22072542.
16. Khan S., Lee H., Lim H., Enhancing Object Detection in Self-Driving Cars Using a Hybrid Approach, “Electronics”, Vol. 12, No. 13, 2023, DOI: 10.3390/electronics12132768.
17. Yang L., Xie T., Liu M., Zhang M., Qi S., Yang J., Infrared Small–Target Detection Under a Complex Background Based on a Local Gradient Contrast Method, “International Journal of Applied Mathematics and Computer Science”, Vol. 33, No. 1, 2023, 33–43, DOI: 10.34768/amcs-2023-0003.
18. Oprzędkiewicz K., Ciurej M., Garbacz M., The agent, state-space model of the mobile robot, “Pomiary Automatyka Robotyka”, Vol. 22, No. 3, 2018, 41–50, DOI: 10.14313/PAR_229/41.
19. Cui Y., Xu H., Wu J., Sun Y., Zhao J., Automatic vehicle tracking with roadside LiDAR data for the connected-vehicles system, “IEEE Intelligent Systems”, Vol. 34, No. 3, 2019, 44–51, DOI: 10.1109/MIS.2019.2918115.
20. Wu J., Xu H., Liu W., Points registration for roadside LiDAR sensors, “Transportation Research Record: Journal of the Transportation Research Board”, Vol. 2673, No. 9, 2019, 627–639, DOI: 10.1177/0361198119843855.
21. Lee S., Lee D., Choi P., Park D., Accuracy–power controllable LiDAR sensor system with 3D object recognition for autonomous vehicle, “Sensors”, Vol. 20, No. 19, 2020, DOI: 10.3390/s20195706.
22. Arikumar K., Deepak Kumar A., Gadekallu T., Prathiba S., Tamilarasi K., Real-time 3D object detection and classification in autonomous driving environment using 3D LiDAR and camera sensors, “Electronics”, Vol. 11, No. 24, 2022, DOI: 10.3390/electronics11244203.
23. Buratowski T., Garus J., Giergiel M., Kudriashov A., Real-time 3D mapping in isolated industrial terrain with use of mobile robotic vehicle, “Electronics”, Vol. 11, No. 13, 2022, DOI: 10.3390/electronics11132086.
24. Mo churad L., Hladun Y., Tkachenko R., An obstacle-finding approach for autonomous mobile robots using 2D
Tomasz Buratowski, Mariusz Giergiel, Piotr Wójcicki, Jerzy Garus, Rafał Kot
LiDAR data, “Big Data and Cognitive Computing”, Vol. 7, No. 1, 2023, DOI: 10.3390/bdcc7010043.
25. Suganuma N., Yoshioka M., Yoneda K., Aldibaja M., LIDAR-based object classification for autonomous driving on urban roads, “Journal of Advanced Control, Automation and Robotics”, Vol. 3, No. 2, 2017, 92–95.
26. Wu J., Xu H., Sun Y., Zheng J., Yue R., Automatic background filtering method for roadside LiDAR data, “Transportation Research Record: Journal of the Transportation Research Board”, Vol. 2672, No. 45, 2018, 14–22, DOI: 10.1177/0361198118775841.
27. Weon I., Lee S., Ryu J., Object recognition based interpolation with 3D LiDAR and vision for autonomous driving of an intelligent vehicle, “IEEE Access”, Vol. 8, 2020, 65599–65608, DOI: 10.1109/ACCESS.2020.2982681.
28. Wu J., Xu H., Tian Y., Pi R., Yue R., Vehicle detection under adverse weather from roadside LiDAR data, “Sensor”, Vol. 20, No. 12, 2020, DOI: 10.3390/s20123433.
29. Chu P.M., Cho S., Park J., Fong S., Cho K., Enhanced ground segmentation method for Lidar point clouds in human-centric autonomous robot systems, “Human-centric Computing and Information Sciences”, Vol. 9, 2019, DOI: 10.1186/s13673-019-0178-5.
30. Wu J., Tian Y., Xu H., Yue R., Wang A., Song X., Automatic ground points filtering of roadside LiDAR data using a channel-based filtering algorithm, “Optics & Laser Technology”, Vol. 115, 2019, 374–383, DOI: 10.1016/j.optlastec.2019.02.039.
31. Guo Y., Bennamoun M., Sohel F., Lu M., Wan J., 3D object recognition in cluttered scenes with local surface features: A survey, “IEEE Transactions on Pattern Analysis and Machine Intelligence”, Vol. 36, No. 11, 2014, 2270–2287, DOI: 10.1109/TPAMI.2014.2316828.
32. Kyriazis I., Fudos I., Building editable free-form models from unstructured point clouds, “Computer-Aided Design and Applications”, Vol. 10, No. 6, 2013, 877–888, DOI: 10.3722/cadaps.2013.877-888.
33. Spinello L., Arras K., Triebel R., Siegwart R., A layered approach to people detection in 3D range data, [In:] Proceedings of the 24th AAAI Conference on Artificial Intelligence, Atlanta, Georgia, USA, 2010, 1625–1630.
34. Kim B., Choi B., Park S., Kim H., Kim E., Pedestrian/ vehicle detection using a 2.5D multi-layer laser scanner, “IEEE Sensors Journal”, Vol. 16, No. 2, 2016, 400–408, DOI: 10.1109/JSEN.2015.2480742.
35. Tombari F., Salti S., Di Stefano L., Unique signatures of histograms for local surface description, [In:] Computer Vision – ECCV 2010, Berlin, Germany: Springer, 2010, 356–369, DOI: 10.1007/978-3-642-15558-1_26.
36. Luo D., Yan-min W., Rapid extracting pillars by slicing point clouds, “The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences”, Vol. 37, 2008, 215–218.
37. Pu S., Rutzinger M., Vosselman G., Elberink S.O., Recognizing basic structures from mobile laser scanning data for road inventory studies, “ISPRS Journal of Photogrammetry and Remote Sensing”, Vol. 66, No. 6, 2011, 28–39, DOI: 10.1016/j.isprsjprs.2011.08.006.
39. NVIDIA Jetson TX2 NX System-on-Module Data Sheet, [www.developer.nvidia.com/downloads/jetson-tx2-nx-system-module-data-sheet].
Bezpieczna i niezawodna jazda szybkiego pojazdu autonomicznego z użyciem systemu LiDAR
Streszczenie: Klasyfikacja obiektów jest ważną technologią dla lądowych pojazdów autonomicznych pozwalającą na identyfikację otaczającego środowiska i zaplanowanie bezpiecznej trasy przejazdu. W artykule zaproponowano metodę klasyfikacji opartą na segmentacji poziomej do wykrywania obiektów w kształcie stożka drogowego w pobliżu pojazdu za pomocą sensora LiDAR. Przechwycona chmura punktów jest dzielona na pięć warstw na podstawie informacji o wysokości, a podziału wykrytych obiektów na dwie grupy, stożki i inne, dokonano z wykorzystaniem klasyfikatorów dostępnych w przybornikach środowiska obliczeniowego MATLAB. Do rozdzielenia sklasyfikowanych obiektów stożkowych na cztery typy, wykorzystywane do oznakowania trasy przejazdu, opracowano i zastosowano algorytm ich rozpoznawania. Zaproponowane metoda, zweryfikowana eksperymentami nawigacyjnymi w warunkach rzeczywistych z wykorzystaniem bezzałogowego samochodu wyścigowego, dała zadowalające wyniki, tj. wysoki poziom klasyfikacji obiektów w kształcie stożka, krótki czas przetwarzania i niską złożoność obliczeniową. Przeprowadzone testy pozwoliły także na zdiagnozowanie przyczyn nieprawidłowej klasyfikacji obiektów stożkopodobnych. Wyniki eksperymentów wykazały, że przedstawione w artykule rozwiązanie może być wykorzystane w czasie rzeczywistym do autonomicznej, bezkolizyjnej jazdy po oznaczonych trasach.
Słowa kluczowe: kołowy pojazd lądowy, jazda autonomiczna, klasyfikacja obiektów, LiDAR
Prof. Tomasz Buratowski, DSc, PhD, Eng. tburatow@agh.edu.pl
ORCID: 0000-0002-2204-195X
Professor at AGH University of Krakow, Faculty of Mechanical Engineering and Robotics, Department of Robotics and Mechatronics. Author of many publications with over 20 years of experience in academia and industry. Areas of research are mechatronics, automation, robotics, mechanical engineering, and system modeling
Prof. Mariusz Giergiel, DSc, PhD, Eng. giergiel@agh.edu.pl
ORCID: 0000-0002-4212-1113
Professor at AGH University of Krakow, Faculty of Mechanical Engineering and Robotics, Department of Robotics and Mechatronics. Member of local and international scientific societies, author of over 200 scientific publications. Areas of research are mobile robots, computer vision systems, mechanical engineering, and system dynamics.
Prof. Jerzy Garus, DSc, PhD, Eng. j.garus@amw.gdynia.pl
ORCID: 0000-0003-1010-3911
Professor at Polish Naval Academy in Gdynia, Faculty of Mechanical and Electrical Engineering. He specializes in the development of computer methods of control of unmanned underwater vehicles. His current research interests are in the field of ship automation, especially nonlinear control of autonomous mobile platform. He has published over 100 papers in refereed journal and conference
Rafał Kot, Lt. MSc, Eng. r.kot@amw.gdynia.pl
ORCID: 0000-0003-1010-3911
Graduated from the Military University of Technology in Warsaw with a degree in Electronics and Telecommunication Studies in 2016. He worked for almost 6 years in the Marine Aviation Base in the Polish Army. From 2022, he is working at the Polish Naval Academy. His main research includes underwater obstacle detection systems, path planning algorithms, and collision avoidance systems for autonomous vehicles
Piotr Wójcicki, Eng. wojcickip@student.agh.edu.pl
ORCID: 0009-0008-7108-8472
Student at AGH Faculty of Mechanical Engineering and Robotics. Member of AGH Racing Formula Student team in the Driver less Vehicle department. The main areas of interest are mobile robotics, software engineering, embedded systems.
Numerical Analysis of the Discrete, Fractional Order PID Controller Using FOBD Approximation
Krzysztof Oprzędkiewicz
AGH University of Science and Technology, Faculty of Electrical Engineering, Automatic Control, Informatics and Biomedical Engineering, Department of Automatic Control and Robotics, al. A. Mickiewicza 30, 30-059 Kraków, Poland
Abstract: This paper proposes a methodology of the numerical testing of the discrete, approximated Fractional Order PID Controller(FOPID). The fractional parts of the controller are approximated using the Fractional Order Backward Difference (FOBD) operator. The goal of the analysis is to find the memory length optimum from point of view both accuracy and duration of computations. To do it new cost functions describing both accuracy and numerical complexity were proposed and applied. Results of tests indicate that the optimum memory length lies between 200 and 400. The proposed approach can be also useful to examine of another discrete implementations of a fractional order operator using FOBD.
One of main areas of application fractional order calculus in automation is a FOPID control. Results presented by many Authors, e.g. [2, 4, 12, 13], show that FOPID controller is able to assure better control performance than its integer order PID analogue.
Each digital implementation of FOPID controller (PLC, microcontroller) requires to apply integer order, finite dimensional, discrete approximant. The most known are: FOBD and CFE (Continuous Fraction Expansion) approximations [1]. They allow to estimate a non-integer order element with the use of a digital filter. The detailed comparison of both methods was done e.g. in [8]. The use of these methods in the FOPID controller were also considered in the paper [10].
For elementary fractional-order integrator/differentiator an analytical form of the step response is known [4]. It can be applied as the reference in a cost function describing an accuracy of an approximation. Typically such a cost function describes an accuracy only and it does not inform about another properties of an approximant, for example its numerical complexity.
This paper deals with the numerical analysis of the accuracy and numerical complexity of the discrete implementation of the FOPID controller. This implementation uses the FOBD approximation to express of the fractional parts of the control-
Autor korespondujący:
Krzysztof Oprzędkiewicz, kop@agh.edu.pl
Artykuł recenzowany nadesłany 22.03.2024 r., przyjęty do druku 28.06.2024 r.
ler. Unfortunately, the good accuracy of this approximation requires to apply of long memory. Of course, this improves a numerical complexity of approximant and consequently increases a duration of calculations. This implies that an implementation of such an algorithm should be preceded by an analysis of both accuracy and numerical complexity. To do it various cost functions containing these both factors need to be used. The paper is organized as follows. Preliminaries draw theoretical background to presenting of main results. Next the proposed cost functions are proposed and employed to testing of the considered, approximated FOPID algorithm. Finally results are discussed.
2. Preliminaries
2.1.
Elementary ideas
Elementary ideas from fractional calculus can be found in many books, for example: [5, 6, 12, 14]. Here only some definitions necessary to explain of main results are recalled.
Firstly the fractional-order, integro-differential operator is given [5, 7, 14]:
Definition 1 (The elementary fractional order operator) The fractional-order integro-differential operator is defined as follows:
(1)
where a and t denote time limits for operator calculation, α ∈ denotes the non-integer order of the operation.
Next remember an idea of Gamma Euler function [7]:
Definition 2 (The Gamma function)
Furthermore recall an idea of Mittag-Leffer functions. The two parameter Mittag-Leffer function is defined as follows:
Definition 3 (The two parameter Mittag-Leffer function)
2.2. The FOBD operator
The GL definition is limit case for h → 0 of the Fractional Order Backward Difference (FOBD), commonly employed in discrete FO calculations (see e.g. [12], p. 68):
Definition 3. (The Fractional Order Backward Difference-FOBD)
Denote co efficients
For β = 1 we obtain the one parameter Mittag-Leffer function:
Definition 4 (The one parameter Mittag-Leffer function)
The coefficients (10) are functions of order α. They can be also calculated with the use of the following, equivalent recursive formula (see e.g. [4], p. 12 ), useful in numerical calculations:
The fractional-order, integro-differential operator (1) can be described by many definitions. The “classic” have been proposed by Grünwald and Letnikov (GL Definition), Riemann and Liouville (RL Definition) and Caputo (C Definition). In this paper C and GL definition will be employed. They are recalled beneath [4, 11].
Definition 5 (The Caputo definition of the FO operator)
where n − 1 < α < denotes the non-integer order of operation and Γ(..) is the complete Gamma function expressed by (2).
For the Caputo operator the Laplace transform can be defined [6]:
Definition 1. (The Laplace transform of the Caputo operator)
It is proven in [3] that:
Definition 2. (The Grünwald-Letnikov definition of the FO operator)
From (11) and (12) we obtain at once that:
In (9) L denotes a memory length necessary to correct approximation of a non-integer order operator. Unfortunately good accuracy of approximation requires to use a long memory L what can make difficulties during implementation.
The approximator FOBD (9) can be described by the G(z−1 ) transfer function in the form of the FIR filter containing only zeros:
where () dl α are expressed by (10) or equivalently by (11), h is the sample time and α is the fractional order. The transfer function (14) is typically applied to approximate of the fractional operator (1).
2.3. The FOPID controller
The FOPID controller is described by the following transfer function (see e.g. [4], p. 33):
. cPID Gskksks =++αβ (15)
where , αβ ∈ are fractional orders of the integration and derivative actions and kP, kI and kD are the coefficients of the proportional, integral and derivative actions respectively.
The analytical formula of the step response of the controller (15) takes the following form [9]:
ing accuracy and complexity associated together. They take the following form:
()()12 IAE DLIAELL =+ωω (23)
()()12 ISE DLISELL =+ωω (24)
where Γ(..) is the complete Gamma function (2). This analytical formula will be used as the reference to estimate of the accuracy of the approximation.
The discrete implementation of the controller (15) using approximator (14) is as beneath:
where IAE(L) and ISE(L) are described by (19) and (20) respectively, ω1 + ω2 = 1.0 are the normalized weight coefficients.
4. Simulations
The step response of the approximated controller (17) takes the following form:
The formula (18) can be computed numerically with the use of step function from MATLAB. It is the function of a time and memory length L. The memory length determines also the accuracy of the implementation. The accuracy as a function of L was analyzed e.g. in the paper [9]. Here both accuracy and numerical complexity will be examined. Cost functions used to do it are proposed in the next section.
3. The considered cost functions
At the beginning consider the accuracy of approximation. It will be tested using known IAE and ISE cost functions, calculated at the discrete time grid and for finite time interval:
1 f K k IAELhek = ∑ (19) ()() 2 1 f K k ISELhek = = ∑ (20)
where k = 1, ..., Kf are the discrete time instants, h is the sample time. Consequently the final time of computing is equal: ff thK = (21)
Error e(k) describes the difference between analytical and approximated step responses (16) vs (18) in the same time moment k:
()()() ,1,,. a FOBD f ekykhykkK =−= (22)
Next the numerical complexity should be tested. Its simpliest estimation is the experimentally measured duration of calculation of the step response (18). It is a function of memory length L and it can be measured during working of software MATLAB. Of course, such an estimation is strongly determined by a hardware-software platform, but it contains more general information too.
A platform-independent measure of the numerical complexity of the considered approximation is the memory length L. It will be employed in the new proposed cost functions, describ-
Simulations were executed at the MATLAB platform using the function step to compute of the step response and functions tic, toc to measure the duration of computations. For each tested value of L the mean value of 100 tests was examined. Tests were done for fixed parameters kP, kI and kD of controller and various fractional orders α and β and memory length L. Values of all parameters applied during tests are collected in the table 1.
Table 1. Values of all parameters used during the tests
Tabela 1. Zestawy wartości parametrów regulatora zastosowane do testów
Weights ω1, ω2 0.5, 0.50.5,
At the beginning the accuracy described by the cost functions (19) and (20) was examined. Comparing of step responses for Parameters 2 and L = 100, 500 and 1000 are shown in the Figure 1, the cost functions IAE and ISE as functions of memory length L are presented in the Figure 2.
In Figures 1 and 2 it can be seen that the accuracy of the approximation is determined by the memory length L as well as the fractional orders of the controller α and β. The accuracy is generally better for smaller orders and decreases for their values tending to one.
Furthermore the average duration of computing was tested. Results are illustrated by the Figure 3.
The Figure 3 allows to conclude that the duration of calculation does not depend on the orders α and β and it is approximately a linear function of the memory length L. This allows to use the memory length L as a direct measure of a numerical complexity.
Fig. 1. The step responses ya (t) vs yFOBD (kh) for Parameters 2 and memory lengths: L = 100 – top, L = 500 – middle and L = 1000 bottom Rys. 1. Porównanie odpowiedzi skokowej analitycznej i aproksymowanej dla zestawu parametrów nr 2 oraz długości pamięci: L = 100 – góra, L = 500 – środek i L = 1000 – dół
Fig. 2. The cost functions (19) and (20) for the approximated step response (18) and various fractional orders given in the table 1: Parameters 1 – top, Parameters 2 – middle, Parameters 3 – bottom Rys. 2. Wskaźniki jakości (19) i (20) dla aproksymowanej odpowiedzi skokowej i różnych rzędów ułamkowych podanych w tabeli 1: zestaw parametrów 1 – góra, zestaw parametrów 2 – środek i zestaw parametrów 3 – dół
Fig. 3. Duration of calculations of the step response of the FOPID approximated by FOBD for various fractional orders
Rys. 3. Czasy obliczeń podczas wyznaczania aproksymowanej odpowiedzi skokowej dla różnych rzędów ułamkowych
Finally the complex cost functions (23) and (24) were examined. During tests the weights ω1 and ω2 were set equal 0.5 for each test. Such values well describe balancing between accuracy and numerical complexity.
The diagrams in the Figure 4 show that the best compromise between accuracy and numerical complexity is achieved for memory length L located in the range between 200 and 400.
5. Final Conclusions
The main result from this paper is that the minimum memory length L = 100 is able to assure the good accuracy only for lower fractional orders in the approximated FOPID controller. For higher orders, greater than 0.5 it is required to apply memory length not smaller than 200. The numerical tests shown in this paper can be expanded to find many other dependencies between accuracy, memory length, fractional orders α and β, coefficients kP,I,D of controller, sample time, value of final time tf and so on.
Interesting can be also formulating of general analytical conditions associating an accuracy and a convergence of an approximation to a duration of computations at industrial device, e.g. at a PLC.
Acknowledgments
This paper was sponsored by AGH UST project no 16.16.120.773.
References
1. Al-Alaoui M.A., Novel digital integrator and differentiator “Electronics Letters”, Vol. 29, No. 4, 1993, 376–378, DOI: 10.1049/el:19930253.
2. Vinagre B.M., Podlubny I., Hernandez A., Feliu V., Some approximations of fractional order operators used in control theory and applications, “Fractional Calculus and Applied Analysis”, Vol. 3, No. 3, 2000, 231–248.
3. Buslowicz M., Kaczorek T., Simple conditions for practical stability of positive fractional discrete-time linear systems.
Fig. 4. The cost functions (23) and (24) for the approximated step response (18) and various fractional orders given in the table 1: Parameters 1 – top, Parameters 2 – middle, Parameters 3 – bottom Rys. 4. Wskaźniki jakości (23) i (24) dla aproksymowanej odpowiedzi skokowej (18) oraz rzędów ułamkowych z tabeli 1: zestaw parametrów 1 – góra, zestaw parametrów 2 – środek i zestaw parametrów 3 – dół
“International Journal of Applied Mathematics and Computer Science”, Vol. 19, No. 2, 2009, 263–269, DOI: 10.2478/v10006-009-0022-6.
4. Caponetto R., Dongola G., Fortuna L., Petráš I., Fractional order systems: Modeling and Control Applications [In:] World Scientific Nonlinear Science Series A, Vol. 72, University of California, Berkeley, 2010.
5. Das S., Functional Fractional Calculus for System Identification and Control. Springer, Berlin, 2010, DOI: 10.1007/978-3-540-72703-3.
6. Kaczorek T., Selected Problems of Fractional Systems Theory. Springer, Berlin, 2011, DOI: 10.1007/978-3-642-20502-6.
7. Kaczorek T., Rogowski K., Fractional Linear Systems and Electrical Circuits. Springer, Bialystok University of Technology, Bialystok, 2015, DOI: 10.1007/978-3-319-11361-6.
8. Dorcák L., Petráš I., Terpák J., Zbrojovan M. Comparison of the methods for discrete approximation of the fractional-order operator. [In:] Proceedings of the ICCC’2003 Conference, Slovak Republic, 851–856.
9. Oprzędkiewicz K., Accuracy estimation of digital fractional order PID controller. [In:] Theory and applications
of non-integer order systems : 8th conference on Non-integer order calculus and its applications, Zakopane, Poland, Lecture Notes in Electrical Engineering; Vol. 407, 2017, 265–275, DOI: 10.1007/978-3-319-45474-0_24.
10. Oprzędkiewicz K., Gawin E., A non-integer order, state space model for one dimensional heat transfer process “Archives of Control Sciences”, Vol. 26, No. 2, 2016, 261–275, DOI: 10.1515/acsc-2016-0015.
11. Ostalczyk P., Equivalent descriptions of a discrete-time fractional-order linear system and its stability domains “International Journal of Applied Mathematics and Computer Science”, Vol. 22, No. 3, 2012, 533–538, DOI: 10.2478/v10006-012-0040-7.
12. Ostalczyk P., Discrete Fractional Calculus. Applications in Control and Image Processing. World Scientific, New Jersey, London, Singapore, 2016, DOI: 10.1142/9833.
13. Petráš I., Fractional order feedback control of a DC motor “Journal of Electrical Engineering”, Vol. 60, No. 3, 2009, 117–128.
14. Podlubny I., Fractional Differential Equations. Academic Press, San Diego, 1999.
Analiza numeryczna dyskretnego regulatora PID niecałkowitego rzędu na bazie aproksymacji FOBD
Streszczenie: W artykule zaproponowano metodologię analizy numerycznej dyskretnego, aproksymowanego regulator PID niecałkowitego rzędu (regulator FOPID). Ułamkowe części regulatora są aproksymowane z wykorzystaniem aproksymacji FOBD (Fractional Order Backward Difference). Celem analizy jest znalezienie długości pamięci (wymiaru aproksymacji) optymalnej z punktu widzenia zarówno dokładności, jak i złożoności obliczeniowej. W tym celu zaproponowano i zastosowano nowe funkcje kosztu, opisujące oba te czynniki. Wynik testów wskazują, że optymalna długość pamięci w rozważanej sytuacji powinna leżeć w zakresie między 200 i 400. Proponowane podejście może też być wykorzystane do analizy innych dyskretnych implementacji operatora niecałkowitego rzędu, wykorzystujących operator FOBD.
Słowa kluczowe: regulator FOPID, aproksymacja FOBD, definicja Grunwalda-Letnikova, dokładność, ISE, ISA, złożoność numeryczna
Prof. Krzysztof Oprzędkiewicz, PhD DSc kop@agh.edu.pl
ORCID: 0000-0002-8162-0011
He was born in Krakow in 1964. He obtained MSc in electronics in 1988, PhD and DSc in Automatics and Robotics in 1995 and 2009 at AGH University of Science and Technology (Krakow, Poland). He has been working at AGH University in Department of Automatics since 1988, recently as a professor. In 2012–2016 he was a deputy dean of faculty of Electrotechnics, Automatics, Informatics and Biomedical Engineering at AGH University. Recently he is the head of the Department of Automatic Control and Robotlics at AGH University. Since 2020 he is also a member of Committee on Automatic Control and Robotics of the Polish Academy of Sciences. His research covers infinite dimensional systems, fractional order modeling and control, uncertain parameter systems, industrial automation, PLC and SCADA systems.
Sterowanie kobotem za pomocą wirtualnej
rzeczywistości dla potrzeb Przemysłu 4.0
Mateusz Salach, Arkadiusz Stęchły, Andrzej Paszkiewicz, Patryk Organiściak, Grzegorz Budzik Politechniki Rzeszowska, Wydział Elektrotechniki i Informatyki, Katedra Informatyki i Automatyki, ul. Wincentego Pola 2, 35-021 Rzeszów
Streszczenie: Przemysł 4.0 przechodzi ciągłą ewolucję. Systemy zarządzania i monitoringu zaimplementowane w infrastrukturze przemysłowej gromadzą i przetwarzają coraz więcej danych, następnie bazując na dedykowanych algorytmach podejmują decyzje, a w konsekwencji wysyłają komendy sterujące do urządzeń i procesów technologicznych. Równocześnie wzrasta zainteresowanie łączeniem urządzeń z innymi na pozór odmiennymi technologiami. Przykładem tworzenia takiej koegzystencji jest integracja rozwiązań przemysłowych z wirtualną rzeczywistością. Działania takie przyczyniają się do tworzenia cyfrowych bliźniaków urządzeń i procesów, co z kolei umożliwia zdalne, a w wielu przypadkach również automatyczne sterowanie fizycznymi obiektami oraz przebiegiem rzeczywistych procesów. W trakcie prowadzonych badań wykorzystano takie podejście do opracowania rozwiązania umożliwiającego sterowanie robotem z dowolnego miejsca i w dowolnym czasie. Niniejsza praca prezentuje prototyp rozwiązania zapewniającego zdalne sterowanie robotem współpracującym typu kobot.
Słowa kluczowe: wirtualna rzeczywistość, robotyka, przemysł 4.0, cyfrowy bliźniak
1. Wprowadzenie
Rozwiązania oparte na wirtualnej rzeczywistości (VR) stają się coraz bardziej popularne, szczególnie w obszarze szkoleń dedykowanych różnym dziedzinom i zastosowaniom. Takie systemy VR są już implementowane na potrzeby medycyny [1–3], edukacji [4–6], przemysłu [7, 8], lotnictwa [9–11], branży automotive [12, 13], a nawet w zastosowaniach militarnych [14, 15, 20, 21]. Wykorzystanie wirtualnej rzeczywistości doskonale wpisuje się w koncepcję Przemysłu 4.0 w ujęciu inteligentnego sterowania wraz z obsługą informacji zwrotnej w czasie rzeczywistym. Równocześnie rozwój technologii wpływa na zakres i potencjał praktycznego wykorzystania nowych rozwiązań. Dzięki wydajniejszym, bardziej zaawansowanym i zoptymalizowanym urządzeniom w połączeniu z nowoczesną infrastrukturą komunikacyjną możliwe staje się wykorzystanie rozwiązań wirtualnej/rozszerzonej (VR/AR), jak również mieszanej rzeczywistości (MR) do kontroli i sterowania różnych urządzeń w czasie zbliżonym do rzeczywistego. Przykładem takiego rozwiązania może być zdalne sterowanie robotem współpracującym przez operatora znajdującego się w zupeł-
Autor korespondujący:
Mateusz Salach, m.salach@prz.edu.pl
Artykuł recenzowany nadesłany 08.12.2023 r., przyjęty do druku 19.08.2024 r.
Zezwala się na korzystanie z artykułu na warunkach licencji Creative Commons Uznanie autorstwa 3.0
nie innym miejscu, często odległym wiele kilometrów, a nawet tysięcy kilometrów od miejsca lokalizacji fizycznego urządzenia. W wielu przypadkach brak bezpośredniego dostępu do fabryki/linii produkcyjnej zwiększa bezpieczeństwo zarówno operatorów jak i samych urządzeń. Obecność innych osób w zasięgu pracy takiego robota jest zabroniona. Użytkownik sterujący danym urządzeniem ma możliwość podglądu sytuacji z wielu kamer rozmieszczonych przy stanowisku. Zakłada się fizyczne odizolowanie strefy pracy robota. Istnieje również możliwość implementacji systemu lokalizacji personelu, który połączony byłby z systemem sterowania robotem. W momencie pojawienia się jakiejkolwiek osoby w strefie pracy robota byłby on automatycznie wyłączony. W przypadku zapewnienia bezpiecznego połączenia, charakteryzującego się jednocześnie dobrymi parametrami transmisyjnymi (np. małymi opóźnieniami) w odniesieniu do przesyłanego obrazu oraz pakietów sterujących robotem możliwe jest efektywne sterowanie urządzeniem praktycznie z każdego miejsca na ziemi. Automatyzacja oraz wirtualizacja takich procesów pozwoli nie tylko swobodnie przełączać się między różnymi urządzeniami, ale także przyczyni się do ograniczenia kosztów. Istotnym aspektem tworzenia tego typu rozwiązań jest również bezpieczeństwo. Taki system może znaleźć zastosowanie nie tylko w przemyśle, ale także podczas klęsk żywiołowych, pandemii, ograniczonej dostępności pracowników itp. Mimo licznych zalet, sterowanie za pomocą technologii VR odrębnym, zewnętrznym urządzeniem nie jest jeszcze powszechne. Można stwierdzić, że obszar ten czeka na odkrycie i uznanie w wielu branżach. Sytuacja taka wynika z pewnością z wielu różnych przesłanek, niemniej jednak należy pamiętać, że wykorzystanie jakiejkolwiek nowej technologii w procesach edukacyjnych jest znacznie prostsze od zastosowania ich w rzeczywistych procesach produkcyjnych, gdzie tolerancja i poziom
akceptacji ewentualnych błędów i niedokładności jest znacznie niższy niż w przypadku szkoleń, czy też kursów instruktażowych. Symulacje szkoleń pozwalają na zapoznanie się z wieloma aspektami i użytkowaniem np. różnego rodzaju ciężkich maszyn [15]. Wychodząc naprzeciw potrzebom przemysłu oraz biorąc pod uwagę olbrzymi potencjał wdrożeniowy autorzy opracowali system zdalnego sterowania robotem współpracującym typu kobot za pomocą kontrolerów dedykowanych wirtualnej rzeczywistości. System integruje wirtualne środowisko z cyfrowym bliźniakiem robota współpracującego UR5e, którego rzeczywisty odpowiednik zlokalizowany został w innej lokalizacji. Dzięki temu użytkownik sterując kontrolerem VR może zdalnie obsługiwać robota współpracującego, który wykonuje komendy przetworzone przez swojego cyfrowego bliźniaka w środowisku VR. Najczęstszym rozwiązaniem stosowanym w robotyce jest sterowanie za pomocą dedykowanych kontrolerów (np. joystick). Zaproponowane rozwiązanie bazuje na kontrolerach VR, implementujące zdalne sterowania, stanowi nowe podejście do zagadnienia kontroli i sterowania urządzeniami przemysłowymi. Zastosowanie kontrolerów VR pozwala w pełni zintegrować i odwzorować ruch, umożliwia użytkownikowi zdalny podgląd otoczenia pracy robota. W drugiej części artykułu przedstawione zostaną rozwiązania oparte o wykorzystanie wirtualnej rzeczywistości zarówno w szkoleniach jak i zdalnym sterowaniu urządzeniami zewnętrznymi. Trzecia część artykułu poświęcona jest koncepcji zdalnego sterowania, zaś czwarta prezentuje wykonanie aplikacji. W ostatniej części prezentowane będą wyniki pomiarowe zaś w sekcji szóstej przedstawione zostanie podsumowanie.
2. Analiza rozwiązań
W ostatnich latach pojawiło się wiele rozwiązań z obszaru VR przeznaczonych dla branży przemysłowej, medycznej, lotniczej oraz automotive. Popularność, coraz szersza dostępność i innowacyjność gogli VR pozwala na przygotowanie atrakcyjnych i realistycznych cyfrowych odpowiedników rzeczywistych obiektów dedykowanych środowisku pracy, jak również znajdujących zastosowanie w szkoleniach. Tworzenie świata wirtualnego wymaga opracowania odpowiednich scenariuszy szkoleń i pracy. W celu uzyskania wyższego poziomu immersji w ramach zdalnego sterowania można zastosować zewnętrzne czujniki wraz z mikrokontrolerami do pozyskiwania dodatkowych informacji np. położenia ciała, bądź ręki. Obecnie przy wykorzystaniu standardowego systemu VR taka integracja jest niedostępna.
Jednakże, środowisko badawczo-rozwojowe umożliwia opracowywanie i wstępne testowanie przyszłych rozwiązań. Przykładem takim jest rozwiązanie, gdzie wykorzystano system VR wraz z mikrokomputerem Raspberry Pi i podłączoną do niej kamerą oraz mikrokontroler Arduino wraz z czujnikami [16]. Za pomocą interfejsu Bluetooth dane z czujników urządzeń wearables zamocowanych na ręce były pozyskiwane, a następnie analizowane przez program, który przetwarzał je na odpowiednie położenie człowieka/robota. Stosując dwa czujniki IMU, dwa czujniki Flex oraz dwa czujniki FSR podłączone do Arduino UNO oraz kamerę podpiętą do RPi, można odczytać położenie całej ręki i przesłać te informacje bezpośrednio do programu, który odpowiadał za sterowanie robotem humanoidalnym. Rozwiązanie to bazowało jedynie na widoku z kamer bez wykorzystania środowiska wirtualnej rzeczywistości. Kolejne interesujące rozwiązanie polega na wykorzystaniu robota współpracującego KUKA LBR iiwa do szkolenia z zakresu wymiany biodra [17]. W pracy skupiono się głównie na podejściu haptycznym tzn. pozyskaniu impulsów zewnętrznych do określenia możliwości i zasięgu pracy urządzenia. VR wykorzystano do prezentacji szkolenia w wirtualnym
środowisku. Ruchy robota zostały pozyskane i wprowadzone do oprogramowania co pozwalało uczestnikowi odczuć większą immersję.
Inny przykład omawia sterowanie robotem za pomocą gogli Oculus Rift w połączeniu z systemem ROS [20]. System ten pozwala na sterowanie rzeczywistym urządzeniem/robotem mobilnym podczas zawodów. Jednym z celów projektu było sprawdzenie scenariusza obejmującego zamianę ról pomiędzy użytkownikiem a robotem. W tym przypadku to robot dyktował komendy użytkownikowi, który miał założone gogle VR. Konkretna osoba otrzymywała komunikaty wskazujące określone zadania do wykonania, np. przeniesienie obiektu z miejsca A do miejsca B. Wirtualna rzeczywistość może zostać wykorzystana także do współpracy z robotami o innej strukturze i przeznaczeniu aniżeli pojazdy bądź roboty współpracujące. W publikacji [19] autorzy prezentują rozwiązanie, w którym udało im się połączyć urządzenia latające UAV (ang. Unmanned Aerial Vehicle) ze środowiskiem VR. Za pomocą kontrolerów mogli zdalnie sterować zarówno dronami w przygotowanym przez nich programie w środowisku Unity, jak i fizycznymi urządzeniami w świecie rzeczywistym. Autorzy opracowali rozwiązanie, w którym połączyli drony z siecią telekomunikacyjną wykorzystując mikrokomputer Raspberry Pi, moduły 5G oraz platformę ROS (ang. Robotic Operating System). Wszystkie zaprezentowane rozwiązania skupiają się na robotach dedykowanych, budowanych przez zespoły pod konkretne zastosowanie, zaś w mniejszym bądź żadnym stopniu na urządzeniach przemysłowych. Rozwiązanie zaprezentowane w artykule wykorzystuje implementację środowiska wraz z robotem produkcyjnym.
3. Środowisko testowe
Większość interfejsów umożliwiających zdalne sterowanie robotem współpracującym jest niewygodna w użyciu. Najczęściej jest to nieporęczny kontroler lub aplikacja komputerowa, która pozwala sterować tylko jednym przegubem w danym momencie lub punktem końcowym w mało intuicyjny sposób. Sterowanie za pomocą kontrolera odbywa się za pomocą drążka lub przycisków na dotykowym ekranie, a w przypadku aplikacji komputerowej przyciskami lub wpisywaniem wartości kątów obrotu. W przypadku kontrolera ABB możliwe jest poruszanie się jednocześnie w trzech osiach (obrót drążka odpowiada za wysokość efektora), lecz jest to trudne i nieprecyzyjne, natomiast w przypadku kontrolera Universal Robots jest ono całkowicie niemożliwe.
Operator poruszający się w aplikacji VR może obserwować fizycznego robota tylko jako obraz z kamery wyświetlony na ekranie. Z uwagi na fakt, że kamery przesyłają obraz dwuwymiarowy, powstaje problem z percepcją głębi. Może to spowodować błędną ocenę pozycji ramienia przez operatora. Aby temu zapobiec w opracowanej aplikacji umieszony został model 3D robota tj. jego cyfrowy bliźniak (Digital twin), którego położe-
Rys. 1. Schemat pomieszczeń, a) rzeczywiste stanowisko, b) aplikacja VR Fig. 1. Room schematics, a) laboratory schematic, b) VR application
nie jest stale aktualizowane, tak aby było zgodne z położeniem fizycznego robota (rys. 1).
Aplikacja VR stworzona została w środowisku Unity w wersji 2020.3.26f1. Dodatkowo, wykorzystana została biblioteka open-source OpenXR, która umożliwia unifikację aplikacji, dzięki czemu jest ona dostępna na różne platformy VR.
4. Algorytm zdalnego sterowania robotem
Program napisany w języku URScript podzielony jest na dwa segmenty, przy czym segment „BeforeStart” wykonywany jest jako pierwszy i tylko raz, natomiast na drugi segment składają się cztery wątki, które działają równolegle w pętlach nieskończonych (rys. 2). Komunikacja między aplikacją VR a programem w języku URScript odbywa się za pomocą protokołu TCP/IP. Sterowanie robotem jest realizowane w czterech wątkach wykonujących się w pętlach nieskończonych i jednej instrukcji wykonywanej jednokrotnie. Instrukcja ta otwiera gniazda TCP/IP, pierwszy wątek odbiera dane wysłane przez aplikację Unity i wysyła wizualizację docelowej pozycji ramienia, drugi wątek również odbiera dane przysyłane przez Unity i oblicza kinematykę odwrotną, trzeci wątek odpowiedzialny jest za ruch ramieniem, a ostatni za przesyłanie rzeczywistych kątów obrotu poszczególnych przegubów ramienia do aplikacji Unity. Z pierwszego gniazda TCP/IP odczytana zostaje wiadomość wysłana przez aplikację VR, wykorzystane zostało do tego celu polecenie socket_read_ascii_float(), które jako parametry przyjmuję liczbę oczekiwany wartości parametrów współrzędnych, oraz nazwę gniazda, które odpowiada za tą komunikację (rys. 3). Jak sama nazwa wskazuje polecenie to przyjmuje wiadomość z liczbami zmiennoprzecinkowymi, poszczególne liczby oddzielane są przecinkami, a cała wiadomość znajduje się w nawiasach. Otrzymana wiadomość zostaje zapisana w tablicy, której pierwsza wartość oznacza, ile liczb się w niej znajduje, jeśli ta
Rys. 2. Algorytm komunikacji między aplikacją VR a programem w URScript
Fig. 2. The algorithm of communication between the VR application and URScript program
Rys. 3. Algorytm przetwarzania kątów ruchu dla robota – I wątek
Fig. 3. The algorithm for processing angles of motion for a robot – I thread
liczba jest inna od oczekiwanej (w tym przypadku „6”), następuje ponowna próba odczytania wartości. Ponieważ silnik Unity korzysta z kątów RPY, czyli kątów Przechylenia (ang. Roll), Pochylenia (ang. Pitch) i Odchylenia (ang. Yaw), a polecenie ruchu robota wymaga wektora obrotu, wykorzystane zostało ogólnodostępne polecenie języka URScript rpy2rotvec(), które wykonuje potrzebne przekształcenia. Za pomocą polecenia get_inverse_kin_has_solution(), sprawdzone zostaje czy robot może dojechać do wskazanego punktu, jeśli tak za pomocą polecenia, get_inverse_kin() obliczona zostaje kinematyka odwrotna robota, a wynikowe kąty obrotu przegubów zostają przesłane do aplikacji VR, w przeciwnym wypadku przesłany zostaje ciąg znaków „False”. Ponieważ cały wątek wykonywany jest w pętli nieskończonej program wraca do odczytywania wiadomości. Drugi wątek działa analogicznie do pierwszego. Z drugiego gniazda TCP/IP odczytane są współrzędne i kąt obrotu docelowego punktu, oraz czy punkt ten jest punktem końcowym czy pośrednim w trajektorii robota. Ostatnia informacja przedstawiona jest za pomocą cyfry 1 lub 0, gdzie 1 oznacza punkt końcowy. W tym wątku również następuje zamiana kątów RPY na wektor obrotu oraz sprawdzenie czy robot może dotrzeć do zadanego punktu. W przypadku możliwości poprawnego dotarcia do zadanego punktu, do zmiennych globalnych przypisane zostają współrzędne, wektor obrotu oraz informacja o punkcie końcowym, a następnie program wraca do początku. W przeciwnym razie wartości zostają odrzucone i odczytana zostaje kolejna wiadomość (rys. 4).
Trzeci wątek (rys. 5) w pierwszej kolejności sprawdza czy punkt jest punktem końcowym ruchu. Jeśli tak, wykonywany jest ruch do zadanego punktu bez blendowania (polecenie MoveJ), w przeciwnym wypadku ruch wykonany jest z mieszaniem. Ruch z blendowaniem (ang. blending) umożliwia robotowi płynne przejście z jednego ruchu do następnego co przedstawia przykład zaprezentowany na rys. 6. Głównymi cechami ruchu MoveJ jest jego szybkość oraz to, że wszystkie przeguby kończą ruch w tym samym momencie. Negatywną cechą tego działania jest zakrzywiony tor ruchu, który w niektórych przypadkach
Zamiana kątów RPY na
współrzędnych i kątów obrotu
Czy robot może dotrzeć do zadanego
Przesłanie kątów
Przesłanie ”
jest trudny do przewidzenia. Dodatkowymi parametrami, jakie ma polecenie MoveJ jest maksymalne przyspieszenie i prędkość kątowa. Ruch ten może się wykonać tylko wtedy, jeśli robot się nie porusza lub wykonuje poprzedni ruch z blendowaniem (mieszaniem).
Na rys. 6 przedstawiono przykładowy ruch bez blendowania i z blendowaniem. W przypadku ruchu pokazanego po lewej stronie, robot zaczynając w punkcie „Pk 1” wykonuje ruch do punktu „Pk 2” i się zatrzymuje, następnie rozpoczyna ruch do punktu „Pk 3”, gdzie kończy ruch. Ruch pokazany po prawej
stronie jest realizowany z włączoną opcją blendowania, robot nie osiąga punktu „Pk 2”, lecz płynnie przechodzi do punktu „Pk 3”, gdzie się zatrzymuje.
Przypisanie współrzędnych,
obrotu i informacji o punkcie końcowym do
Rys. 4. Algorytm przetwarzania kątów ruchu dla robota – II wątek
Fig. 4. The algorithm for processing angles of motion for a robot – II thread
Rys. 5. Algorytm przetwarzania kątów ruchu dla robota – III wątek
Fig. 5. The algorithm for processing angles of motion for a robot – III thread
Rys. 6. Porównanie ruchu bez oraz z mieszaniem
Fig. 6. Comparison of movements without and with blending
obrotu
Przesyłanie odczytanych kątów
Rys. 7. Algorytm przetwarzania kątów ruchu dla robota – IV wątek
Fig. 7. The algorithm for processing angles of motion for a robot – IV thread
Czwarty wątek (rys. 7) odpowiedzialny jest wyłącznie za odczyt i przesłanie aktualnych kątów odchylenia przegubów robota. Utworzenie tego wątku było konieczne, aby umożliwić płynną wizualizację robota w aplikacji Unity. Kąty odczytane są za pomocą polecenia get_actual_joint_positions(), które to zwraca tablicę liczb zmiennoprzecinkowych. Następnie za pomocą polecenia socket_send_string() tablica liczb zostaje zamieniona na ciąg znaków, które przesłane są do Unity.
5. Aplikacja VR sterująca robotem
Aplikacja VR obejmuje pomieszczenie, w którym znajduje się cyfrowy bliźniak robota oraz ekran, na którym wyświetlony zostanie obraz z kamery i punktowe źródło światła (rys. 8).
Do zaprezentowania kolejnych położeń manipulatora zastosowano modele 3D udostępnione przez producenta robota. Model ten został uproszczony w oprogramowaniu Blender, aby ułatwić manipulowanie nim i zmniejszyć stopień skomplikowania siatki wielokątów. Do materiału modelu przedstawiającego docelowe położenie ramienia został przypisany kanał alfa, aby osiągnąć efekt przezroczystości (rys. 9).
Podczas działania aplikacji wychylenie przegubów w modelach zmienia się, co pozwala użytkownikowi ocenić docelowe oraz aktualne położenie manipulatora. Dodatkowo wyświetlony jest obraz z kamery jako tekstura ekranu. Skrypty odpowiedzialne za działanie aplikacji zostały przedstawione za pomocą schema-
Zamiana kątów RPY na
Odebranie współrzędnych, kątów obrotu i potwierdzenia czy jest to punkt końcowy
Czy robot może dotrzeć do zadanego
kątów
kątów
Rys. 8. Widok pomieszczenia w aplikacji VR w silniku Unity Fig. 8. The view of VR room in Unity software
Rys. 9. Widok cyfrowego bliźniaka robota ramieniowego w Unit y Fig. 9. The view of digital twin of robotic arm in Unity software
tów blokowych (rys. 10 i rys. 11). Podzielone zostały na skrypty odpowiedzialne za model docelowego położenia robota i model położenia bieżącego.
Pierwszy algorytm jest odpowiedzialny za działanie rzeczywistego robota (rys. 10). Skrypt ten działa w dwóch wątkach, gdzie główny wątek jest odpowiedzialny za przesyłanie pozycji końcowej robota, natomiast drugi wątek steruje cyfrowym bliźniakiem. Główny wątek skryptu odpowiada za komunikację z robotem w czasie rzeczywistym. W ramach tego wątku skrypt odczytuje pozycję wskaźnika, czyli jego położenie i obrót. Następnie przekształca te dane, np. zamienia jednostki na milimetry. Przed wysłaniem współrzędnych sprawdzany jest stan przycisku, jeśli jest nadal wciśnięty, robot będzie się poruszał z mieszaniem. Drugi wątek skryptu jest odpowiedzialny za sterowanie cyfrowym bliźniakiem robota. Ten wątek skryptu odpowiada za aktualizowanie pozycji modelu na podstawie odczytanych danych z rzeczywistego robota. Obejmuje to aktualizację położenia i orientacji modelu wirtualnego robota, tak aby był on zawsze zgodny z rzeczywistym robotem. Oba wątki skryptu działają w pętli nieskończonej, a dzięki prostocie obliczeniowej utrzymują zgodność między rzeczywistym robotem a jego wirtualnym modelem.
Drugi algorytm (rys. 11) jest odpowiedzialny za działanie modelu podglądu położenia końcowego. Skrypt ten działa w dwóch wątkach, gdzie główny wątek jest odpowiedzialny za przesyłanie pozycji docelowej robota, natomiast drugi wątek steruje modelem przedstawiającym przyszłą pozycję robota. Główny wątek skryptu odpowiada za przesyłanie do sterownika punktu docelowego, do którego robot ma się przemieścić. Sterownik sprawdza, czy można obliczyć kinematykę odwrotną dla podanego punktu. Jeśli tak, to ją oblicza. Obliczone kąty obrotu przesyłane są do aplikacji VR. Drugi wątek skryptu jest odpowiedzialny za sterowanie modelem, który przedstawia docelową pozycję robota. Jeśli przesłany zostaje ciąg znaków „False” zmieniany jest kolor modelu docelowego, w przeciwnym razie model jest obracany zgodnie z obliczonymi kątami. Drugi wątek stale aktualizuje model docelowej pozycji robota, informując użytkownika o ułożeniu manipulatora po przesłaniu polecenia ruchu.
Uruchomienie wątku obsługującego gniazdo
przychodzący strumień Nawiązanie połączenia z połączony klient
Przekształcenie współrzędnych końcowych
Przesłanie przekształconych współrzędnych do
Przesłanie
Rys. 10. Algorytm docelowego położenia robota: a) przesyłanie poprawnych danych, b) ruch fizyczny robota
Fig. 10. Algorithm of the target position of the robot: a) transmission of correct data, b) movement of the physical robot
modelu poglądowego Czy wartość wiadomości jest „ ”
Rys. 11. Algorytm bieżącego położenia modelu 3D robota: a) przesyłanie poprawnych danych, b) ruch i modyfikacja modelu podglądowego
Fig. 11. Algorithm for current position of 3D robot model: a) transmission of correct data, b) movement and modification of preview model wątku
Mateusz Salach, Arkadiusz Stęchły, Andrzej Paszkiewicz, Patryk Organiściak, Grzegorz Budzik
Testy sterowania fizycznym robotem z poziomu aplikacji VR
W celu weryfikacji działania aplikacji oraz jej połączenia z fizycznym ramieniem UR5 przeprowadzono szereg testów. Testy polegały na przeniesieniu wybranego elementu z punktu A, zdefiniowanego jako pozycja początkowa do punktu B, zdefiniowanego jako punkt końcowy. W testach wzięli udział zarówno studenci dysponujący doświadczeniem z zakresu poruszania się i obsługi aplikacji wirtualnej rzeczywistości, jak i osoby pierwszy raz pracujące w środowisku VR. Pierwsze pomiary wykonano startując z punktu A o współrzędnych X = 10, Y = 10, Z = 10. Wartości wyrażone są w milimetrach jako jednostka odległości od punktu (0, 0, 0) deklarowanej przez robota. Punkt końcowy (B) miał współrzędne X = 200, Y = 200, Z = 200. Uczestnicy badań mieli za zadanie dotrzeć z punktu A do punktu B za pomocą kontrolera VR, mając podgląd obrazu z kamery skierowanej bezpośrednio na rzeczywistego robota oraz cyfrowego bliźniaka. Położenie cyfrowego bliźniaka odpowiadało szacowanemu końcowemu położeniu robota. Ruch kontrolera w zadanym kierunku wprawiał ramię robotyczne w ruch w tej samej osi. W trakcie pomiarów użyto gogle Oculus Quest 2 wraz z kontrolerami wchodzącymi w skład zestawu. Do przesyłania rzeczywistego obrazu do aplikacji VR wykorzystano kamerę Logitech C920 HD. Po zakończeniu każdego pomiaru z panelu kontrolnego robota UR5 odczytywane były współrzędne (X, Y, Z) zatrzymania ramienia (tab. 1). Wartości te były porównywane z zadanymi współrzędnymi (wartościami startowymi), jednocześnie obliczano wyrażoną w procentach dokładność dotarcia do punktu B (tab. 2). Na podstawie analizy otrzymanych wyników można stwierdzić, że dokładność wykonania zadań w VR dla pierwszych ośmiu osób jest większa w porównaniu z wynikami uzyskanymi przez kolejne osiem osób. Jest to związane z doświadczeniem
Tab. 1. Współrzędne zatrzymania końca ramienia robota
Tab. 1. The coordinates of the stop of the end of the robotic arm Punkt zatrzymania ramienia [mm]
Próby
Tab. 2. Dokładność dotarcia do punktu docelowego oraz błąd odległości
Tab. 2. The accuracy of reaching the destination point and distance of the stopped robot
Dokładność dotarcia do punktu docelowego [%] Błąd odległości [%]
pracy w VR poszczególnych uczestników testów. Dla grupy pierwszych ośmiu osób wykonywane ruchy były bardziej naturalne. Kolejne pomiary przeprowadzono z osobami, które nie miały wcześniej styczności z VR. Po raz pierwszy zapoznali się z elementami VR przed realizacją doświadczenia, zasadami pracy w takim środowisku oraz zadaniami, które mieli wykonać. Ich umiejętność poruszania się w świecie wirtualnym były na poziomie adekwatnym dla osób poczatkujących.
Warto zaznaczyć, że uczestnicy najlepiej radzili sobie z dotarciem do punktu docelowego w osi Z. Jest to oś wysokości od podłoża. Po przedstawieniu uczestnikom wartości docelowej okazało się, że było im znacznie łatwiej dotrzeć do zadanej wysokości niż do wartości punktu docelowego zdefiniowanych w osiach X i Y.
7. Podsumowanie
Rozwój przemysłu wprowadza nowe technologie i rozwiązania umożliwiające efektywniejsze zarządzanie produkcją lub logistyką. Szkolenia przeprowadzane w wirtualnych środowiskach dostarczają nowych możliwości, w wielu przypadkach będąc efektywniejszymi i oszczędniejszymi. Sterowanie maszynami za pomocą własnych ruchów jest jednak elementem uznawanym wciąż jako aspekt teoretyczny. Testy wykazały, iż niezbędne jest dopracowanie w przyszłości algorytmów tak aby ruch robota współpracującego stał się jak najbardziej naturalny, szczególnie ważne jest do dla odczucia naturalnego ste-
rowania przez użytkownika. Przeprowadzone doświadczenia wykazały, że na sprawność pracy w środowisku VR, a co za tym idzie na dokładność wykonanych zadań ma wpływ posiadane doświadczenie i czas spędzony przez użytkowników w VR. Biorąc pod uwagę fakt, że technologia VR może koegzystować z rzeczywistą infrastrukturą przemysłową, a co więcej działania wykonywane w wirtualnym środowisk mogą być automatycznie odwzorowywane na linii produkcyjnej precyzja ruchów operatorów VR ma istotne znaczenie dla jakości wykonywanej pracy. Dlatego też, w dalszych pracach przewidziane jest zaktualizowanie sterowania aby ruch robota odbywał się płynniej i bardziej naturalnie. Planowane jest również zaimplementowanie aplikacji na innych platformach robotycznych oraz umożliwienie sterowania dwoma ramionami w tym samym czasie.
Podziękowania
Projekt finansowany w ramach programu Ministra Edukacji i Nauki pod nazwą „Regionalna Inicjatywa Doskonałości” w latach 2019–2023 nr projektu 027/RID/2018/19 kwota finansowania 11 999 900 zł.
Bibliografia
1. Kuehn B.M., Virtual and Augmented Reality Put a Twist on Medical Education, “JAMA”, Vol. 319, No. 8, 2018, 756–758, DOI: 10.1001/jama.2017.20800.
2. Moro C., Štromberga Z., Raikos A., Stirling A., The effectiveness of virtual and augmented reality in health sciences and medical anatomy, “Anatomical Sciences Education”, Vol. 10, No. 6, 2017, 549–559, DOI: 10.1002/ase.1696.
3. Ra jeswaran P., Varghese J., Kumar P., Vozenilek J., Kesavadas T., AirwayVR: Virtual Reality Trainer for Endotracheal Intubation. 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), 2019, 1345–1346, DOI: 10.1109/VR.2019.8797998.
4. Khalilia W.M., Gombar M., Palkova Z., Palko M., Valicek J., Harnicarova M., Using Virtual Reality as Support to the Learning Process of Forensic Scenarios. “IEEE Access”, Vol. 10, 2022, 83297–83310. DOI: 10.1109/ACCESS.2022.3196471.
5. Desselle M.R., Brown R.A., James A.R., Midwinter M.J., Powell S.K., Woodruff M.A., Augmented and Virtual Reality in Surgery, “Computing in Science & Engineering”, Vol. 22, No. 3, 2020, 18–26, DOI: 10.1109/MCSE.2020.2972822.
6. Pinter C., Lasso A., Choueib S., Asselin M., Fillion-Robin J.-C., Vimort J.-B., Martin K., Jolley M.A., Fichtinger G., SlicerVR for Medical Intervention Training and Planning in Immersive Virtual Reality, “IEEE Transactions on Medical Robotics and Bionics”, Vol. 2, No. 2, 2020, 108–117, DOI: 10.1109/TMRB.2020.2983199.
7. Davila Delgado J.M., Oyedele L., Demian P., Beach T., A research agenda for augmented and virtual reality in architecture, engineering and construction. “Advanced Engineering Informatics”, Vol. 45, 2020, DOI: 10.1016/j.aei.2020.101122.
8. Joshi S., Hamilton M., Warren R., Faucett D., Tian W., Wang Y., Ma J., Implementing Virtual Reality technology for safety training in the precast/ prestressed concrete industry, “Applied Ergonomics”, Vol. 90, 2021, DOI: 10.1016/j.apergo.2020.103286.
9. Wang H., Zhang B., Zhang T., Jakacky A., Tele-operating a Collaborative Robot for Space Repairs with Virtual Reality, IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2019, 175–180, DOI: 10.1109/CYBER46603.2019.9066493.
10. Clifford R.M.S., Khan H., Ho ermann S., Billinghurst M., Lindeman R.W., The Effect of Immersive Displays on Sit-
uation Awareness in Virtual Environments for Aerial Firefighting Air Attack Supervisor Training. IEEE Conference on Virtual Reality and 3D User Interfaces (VR), 2018, DOI: 10.1109/VR.2018.8446139.
11. Li Y., Cabin Operation and Management Model Based on VR Technology, 13th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), 2021, DOI: 10.1109/ICMTMA52658.2021.00013.
12. Sun X., Wang X., Wang X., Design of Vehicle Engineering Teaching System Based on VR Technology. 5th Asian Conference on Artificial Intelligence Technology (ACAIT), 2021, 414–418, DOI: 10.1109/ACAIT53529.2021.9730892.
13. Ciprian Firu A., Ion Tapîrdea A., Ioana Feier A., Drăghici G., Virtual reality in the automotive field in industry 4.0 “Materials Today: Proceedings”, Vol. 45, Part 5, 2021, 4177–4182, DOI: 10.1016/j.matpr.2020.12.037.
14. Dourado A.O., Martin C.A., New concept of dynamic flight simulator, Part I, “Aerospace Science and Technology”, Vol. 30, No. 1, 2013, 79–82, DOI: 10.1016/j.ast.2013.07.005.
15. Knerr B.W., Immersive Simulation Training for the Dismounted Soldier, University of Michigan Library, 2007.
16. Moon B.-H., Choi J.-W., Jung K.-T., Kim D.-H., Song H.-J., Gil K.-J., Kim J.-W., Connecting motion control mobile robot and VR content, 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), 2017, 355–359, DOI: 10.1109/URAI.2017.7992750.
17. Knopp S., Lorenz M., Pelliccia L., Klimant P., Using Industrial Robots as Haptic Devices for VR-Training, IEEE Conference on Virtual Reality and 3D User Interfaces (VR), 2018, 607–608, DOI: 10.1109/VR.2018.8446614
18. Inamura T., Mizuchi Y., Robot Competition to Evaluate Guidance Skill for General Users in VR Environment. 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2019, 552–553, DOI: 10.1109/HRI.2019.8673218.
19. Chen H., Liu F., Yang Y., Meng W., MultiVR: Digital Twin and Virtual Reality Based System for Multi-people Remote Control Unmanned Aerial Vehicles, 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2022, 647–652, DOI: 10.1109/ICARCV57592.2022.10004244.
Inne źródła
20. Losey S., United States Air Force Academy, [www.airforcetimes.com/news/your-air-force/2019/10/08/ academy-brings-vr-pilot-training-to-cadets].
Cobot Control Using Virtual Reality for the Needs of Industry 4.0
Abstract: TIndustry 4.0 is undergoing continuous evolution. Management and monitoring systems implemented in the industrial infrastructure are able to collect and process more and more data, then, based on dedicated algorithms, make decisions, and consequently send specific control commands to devices and technological processes. At the same time, there is growing interest in combining devices with other seemingly disparate technologies. An example of creating such coexistence is the integration of sensory solutions with virtual reality. Such activities contribute to the creation of digital twins of devices and processes, which in turn enables remote and in many cases automatic control of physical objects and the course of real processes. In the course of this research, such an approach has been used to develop a solution that allows a robot to be controlled from anywhere and at any time. This work presents a prototype of a solution providing remote control of a cobot arm robot.
Keywords: virtual reality, robotics, Industry 4.0, digital twin
mgr inż. Mateusz Salach m.salach@prz.edu.pl
ORCID: 0000-0002-9199-3460
Asystent w Zakładzie Systemów Złożonych Wydziału Elektrotechniki i Informatyki Politechniki Rzeszowskiej. Zajmuje się rozwiązaniami i badaniami z zakresu Internetu Rzeczy, VR oraz Smart City.
dr inż. Andrzej Paszkiewicz andrzejp@prz.edu.pl
ORCID: 0000-0001-7573-3856
Adiunkt w Zakładzie Systemów Złożonych Politechniki Rzeszowskiej. Stopień doktora nauk technicznych w zakresie informatyki uzyskał w 2009 r. na Politechnice Łódzkiej. Autor około 100 publikacji w krajowych i międzynarodowych czasopismach naukowych i materiałach konferencyjnych. Organizował warsztaty i konferencje z zakresu sieci komputerowych, inżynierii oprogramowania oraz Przemysłu 4.0. Jego zainteresowania badawcze skupiają się na procesach zachodzących w strukturach sieciowych, VR/AR, a także na rozwoju technologii dla przemysłu.
Prof. dr hab. inż. Grzegorz Budzik gbudzik@prz.edu.pl
ORCID: 0000-0003-3598-2860
mgr inż. Patryk Organiściak org@prz.edu.pl
ORCID: 0000-0002-5277-4038
Pracownik naukowo-dydaktyczny na Politechnice Rzeszowskiej, gdzie prowadzi zajęcia z technologii informacyjnych, programowania, przetwarzania danych oraz cyberbezpieczeństwa. Jednocześnie realizuje projekty komercyjne w ramach własnego software house, specjalizując się w tworzeniu oprogramowania dla biznesu.
mgr inż. Arkadiusz Stęchły
arkadiusz.stechly@kneiti.prz.edu.pl
ORCID: 0009-0006-5200-761X
Student Politechniki Rzeszowskiej, gdzie ukończył studia pierwszego stopnia na kierunku Automatyka i Robotyka. Kontynuuje studia drugiego stopnia na kierunku Informatyka na specjalności Cyberbezpieczeństwo i technologie chmurowe.Realizuje projekty naukowe w ramach koła naukowego, specjalizując się w tworzeniu oprogramowania wykorzystującego technologię wirtualnej i rozszerzonej rzeczywistości.
Profesor w Katedrze Konstrukcji Maszyn na Wydziale Budowy Maszyn i Lotnictwa Politechniki Rzeszowskiej. Obszar jego badań obejmuje inżynierię mechaniczną, wytwarzanie przyrostowe, systemy CAD, rozwój nanomateriałów przy użyciu druku 3D i technik szybkiego prototypowania. Był prodziekanem ds. badań naukowych na Wydziale Budowy Maszyn i Lotnictwa (2012–2016) oraz prorektorem ds. badań naukowych (2016-2020) Politechniki Rzeszowskiej. Wniósł obszerny wkład w światową literaturę dotyczącą komputerowego wspomagania inżynierii i wytwarzania przyrostowego w Rapid Prototyping Journal, Journal of Cleaner Production, Polymers, Sensors, Nanomaterials. Jest współautorem 7 książek i 15 rozdziałów. Twórca 19 patentów i 20 licencjonowanych technologii dla przemysłu oraz start-upów. Jest ekspertem Polskiego Komitetu Normalizacyjnego oraz Międzynarodowej Organizacji Normalizacyjnej ISO sekcja TC 261/WG 2.
Metoda pomiaru parametrów kamer termowizyjnych
za pomocą zautomatyzowanego stanowiska pomiarowego
Mariusz Mścichowski, Krzysztof Sawicki, Tomasz Sosnowski, Krzysztof Firmanty, Mariusz Kastek, Jarosław Bareła
Wojskowa Akademia Techniczna, Instytut Optoelektroniki, ul. gen. Sylwestra Kaliskiego 2, 00-908 Warszawa
Streszczenie: W celu wykonania precyzyjnych i powtarzalnych pomiarów parametrów kamer termowizyjnych należy wykluczyć błąd ludzki. W tym celu opracowano zautomatyzowane stanowisko do pomiaru parametrów kamer termowizyjnych z możliwością sterowania całkowicie automatycznego, półautomatycznego i manualnego. Wykonane stanowisko umożliwia pracę zdalną za pomocą interfejsu Ethernet lub bezpośredniego połączenia USB. Opracowane oprogramowanie umożliwia sterowanie, rejestrację danych i wyznaczanie parametrów kamer. Stanowisko gwarantuje wysoką jakość i niezawodność pomiarów termowizyjnych, umożliwiając kontrolowane badanie charakterystyk kamer przy minimalnym udziale operatora.
Słowa kluczowe: ciała czarne, automatyzacja pomiarów, stanowisko pomiarowe, systemy termowizyjne
1. Wprowadzenie
Intensywny rozwój technologii wiąże się ze zwiększonym zapotrzebowaniem na coraz większą liczbę coraz lepszych urządzeń, w tym również kamer termowizyjnych. Kamery termowizyjne, oprócz standardowego pomiaru temperatury ciał mają również zastosowanie w wielu dziedzinach nauki, np. w medycynie [1−3], astronomii [4, 5] czy techniki: rolnictwie [6, 7], zabezpieczeniach [8, 9] czy geologii [10]. Wykorzystywane są również do nieinwazyjnych badań uszkodzeń, zarówno w stosunkowo małych elementach mieszczących się na stole [11], jak i całych budynków [12]. Wszystko co łączy te dziedziny to ciągły rozwój i zwiększające się wymagania co do precyzji pomiaru. Aby kamera termowizyjna pracowała z wymaganą precyzją, należy urządzenie odpowiednio zaprojektować, przebadać oraz skalibrować w celu ustalenia wszystkich wymaganych współczynników zespołu kamery termowizyjnej. Są to procesy żmudne ale możliwe do zautomatyzowania. W tym celu zaprojektowano specjalnie przygotowane stanowisko do pomiarów parametrów kamer termowizyjnych.
2. Wyznaczanie podstawowych parametrów dla matrycy detektorów
Jednym z najważniejszych elementów kamery termowizyjnej jest matryca detektorów podczerwieni. Od parametrów związanych z zastosowaną matrycą oraz od związanych z nią układów elektronicznych i optycznych zależy jakość uzyskanego termogramu. Dlatego bardzo ważne jest wyznaczanie podstawowych parametrów dla matrycy detektorów. Generalnie dla kamer termowizyjnych są wyznaczane trzy główne parametry do których należą MRTD (ang. Minimum Resolvable Temperature Difference), NETD (ang. Noise Equivalent Temperature Difference) oraz FPN (ang. Fixed Pattern Noise). Standardowo wyznaczanie tych parametrów jest związane najczęściej z obecnością tzw. wyszkolonego obserwatora. W związku z tym zautomatyzowanie procesu wyznaczania parametrów kamery termowizyjnej wymaga zmiany sposobu ich wyznaczania. W opracowywaniu sposobu wyznaczania parametrów należy zwrócić szczególną uwagę na dokładność obliczeń numerycznych oraz na wykrywanie i zautomatyzowaną reakcję na wystąpienie niewłaściwych danych wejściowych (zarejestrowanych z kamery) i błędnych wartości obliczeń.
Artykuł recenzowany nadesłany 17.07.2023 r., przyjęty do druku 23.04.2023 r.
się na korzystanie z artykułu na warunkach
Moc równoważna szumom NETD to parametr wykorzystywany w termowizji do określenia możliwości reakcji detektora na małe zmiany temperatury. NETD jest istotne w ocenie jakości detektorów termowizyjnych, ponieważ wpływa na zdolność detektora do rozpoznawania małych różnic temperatur na termogramie. Im niższa wartość NETD, tym lepiej detektor radzi sobie z wykrywaniem subtelnych zmian temperatury, co
przekłada się na lepszą jakość termogramu i bardziej precyzyjne pomiary.
W celu wyznaczenia szumów czasowych wysokiej częstotliwości NETD należy przeprowadzić pomiary wartości skutecznej napięcia sygnału szumu przestrzennego U n, wartości napięcia sygnału pochodzącego od testu U2 o temperaturze T2, oraz wartości napięcia sygnału pochodzącego od tła U1 o temperaturze T1. Zarówno test, jak i jego tło powinno charakteryzować się dużym współczynnikiem emisyjności. Różnica temperatury tła T1 i temperatury testu T2 nie powinna być większa niż kilka stopni. Badane urządzenie powinno być tak ustawione, aby otrzymać centralnie położony termogram testu na jego ekranie. Szum czasowy wysokiej częstotliwości NETD wyznaczony jest na podstawie wyników pomiarów według wzoru [13, 14]:
21 21 NETD n TTU UU = (1)
gdzie: NETD – rozdzielczość temperaturowa, T1 – temperatura tła, T2 – temperatura testu, U n – wartość skuteczna szumów, U1 – wartość sygnału tła, U2 – wartość sygnału testu.
Ze względu na to, że opisany sposób wyznaczania NETD nie może zostać łatwo zautomatyzowany, należy go zmodyfikować. W tym celu parametr NETD dla detektora (m, n) matrycy jest określony wzorem: () () () , ,. , noisemn NETDmn Rmn = (2)
gdzie: R(m, n) – czułość matrycy detektora (m, n), noise(m, n) – wartość skuteczna szumu detektora (m, n), m – numer wiersza, n – numer kolumny.
Czułość matrycy detektorów wyznacza się przez pomiar odpowiedzi detektorów matrycy na termogram z powierzchniowego źródła promieniowania mającego cechy ciała doskonale czarnego w dwóch różnych temperaturach T1 i T2. Wówczas czułość każdego detektora matrycy można wyznaczyć za pomocą wzoru:
Parametr NETD dla matrycy detektorów jest określony jako średni NETD detektorów matrycy za pomocą wzoru:
gdzie: NETDVR(m, n) – wartość NETD dla detektora, który nie jest uważany jako detektor uszkodzony, NVN – liczba nieuszkodzonych detektorów.
2.2. Wyznaczania charakterystyki minimalnej rozróżnialnej różnicy temperatur MRTD
Charakterystyka minimalnej rozróżnialnej różnicy temperatur MRTD to parametr używany w termowizji do określenia minimalnej różnicy temperatur, która może być rozpoznawana przez detektor termowizyjny. Jest to miara zdolności detektora do rozróżniania małych detali na termogramie w zależności od różnicy temperatur między tymi detalami a tłem.
Procedura wyznaczenia charakterystyki minimalnej rozróżnialnej różnicy temperatur MRTD urządzeń termowizyjnych jest procedurą opracowaną na podstawie wymogów normy NATO STANAG no. 4349 [15]. Charakterystyka minimalnej rozróżnialnej różnicy temperatur MRTD jest definiowana jako zależność minimalnej różnicy temperatury pasków testu czteropaskowego i temperatury tła, zapewniającej rozróżnienie wszystkich pasków testów przez obserwatora, od częstości przestrzennej testu.
W celu wyznaczenia charakterystyki MRTD prowadzi się pomiar minimalnej różnicy temperatury pasków testu i temperatury tła, przy której obserwator jest w stanie rozróżnić wszystkie cztery paski testu. Obserwator może w trakcie badań optymalizować wartości wzmocnienia toru elektronicznego, jaskrawość ekranu, oraz inne mechanizmy regulacji w ramach ograniczeń istniejących w realnych warunkach pracy, natomiast czas obserwacji nie jest ograniczony.
()
()() 21 21 ,,,,,, ,, VmnkTVmnkT
Rmn TT = (3)
gdzie V(m, n, k, T) oznacza sygnał napięciowy odczytany z detektora położonego w m-tym wierszu i n-tej kolumnie na k-tym termogramie (ramce), który został wywołany promieniowaniem obiektu o temperaturze T
Wartość skuteczną szumu danego detektora matrycy można wyznaczyć przez obliczenie pierwiastka kwadratowego wariancji sygnału odczytanego dla kolejnych chwil czasowych. Zakłada się, że natężenie promieniowania padającego na detektor jest niezmienne w czasie pomiaru. Dla termogramów dyskretnych w czasie wartość skuteczna szumu detektora położnego w m-tym wierszu i n-tej kolumnie jest określona jako pierwiastek kwadratowy nieobciążonego estymatora wariancji i jest wyrażona równaniem:
Badania są przeprowadzone najpierw dla dodatniej różnicy temperatury pasków testu względem temperatury tła, a następnie dla ujemnej różnicy. Określa się różnice temperatur, przy których obserwator zaczyna rozróżniać wszystkie paski testu. Końcowe wartości MRTD otrzymane dla pojedynczego obserwatora wyznacza się według wzoru [15]: () ()() , 2 TvTv MRTDv +− ∆−∆ = (7)
gdzie: MRTD – minimalna rozpoznawalna różnica temperatur w funkcji częstości przestrzennej, ∆T+(ν) – dodatnia różnica temperatur między słupkami testowymi a temperaturą tła w odniesieniu do momentów, w których obserwator zaczyna rozróżniać słupki testowe, ∆T–(ν) – ujemna różnica temperatur między słupkami testowymi a temperaturą tła w odniesieniu do momentów, w których obserwator zaczyna rozróżniać słupki testowe.
gdzie V(m, n) jest wartością średnią odpowiedzi detektora położonego w m-tym wierszu i n-tej kolumnie określona wzorem (5).
Opisany sposób wyznaczania MRTD nie może zostać zautomatyzowany, ponieważ do jego wyznaczenia niezbędny jest wyszkolony obserwator. W związku z tym, do pomiaru MRTD za pomocą zautomatyzowanego stanowiska pomiarowego zastosowano metodę pomiaru MRTD w funkcji rozogniskowania układu optycznego. Szczegółowa metoda pomiaru została zaprezentowana w literaturze [16].
Zastosowane w kamerach termowizyjnych matryce detektorów podczerwieni zwracają informację w postaci sygnału elektrycznego. Matryca detektorów charakteryzuje się pewną niejednorodnością odpowiedzi poszczególnych detektorów na takie samo wymuszenie (moc padającego promieniowania podczerwonego). Efektem niejednorodności jest występowanie w termogramie generowanym przez matrycę tzw. stałego wzoru szumu FPN. Niejednorodność odpowiedzi matrycy jest powodowana rozrzutem technologicznym parametrów matrycy. Układ odczytu zintegrowany z matrycą zwykle nie realizuje funkcji korekcji niejednorodności NUC (ang. Non-Uniformity Correction). W związku z tym korekcja NUC jest wykonywana za pomocą zewnętrznego układu. Najczęściej stosowaną metodą korekcji niejednorodności to korekcja dwupunktowa. Dwupunktowa korekcja niejednorodności odpowiedzi matrycy detektorów polega na skorygowaniu wartości każdego detektora za pomocą równania:
W celu wyznaczenia współczynników korekcji G(m, n) i O(m, n) należy rozwiązać następujący układ równań:
=⋅+
VTGmnVmnTOmn VTGmnVmnTOmn
, ,,,,
(9)
gdzie: () ,, VmnT – wartość odpowiedzi detektora (m, n) będąca skutkiem padającego na niego promieniowania pochodzącego od obiektu o temperaturze T, () 1VT – oczekiwana odpowiedź detektora na skutek padającego na niego promieniowania pochodzącego od obiektu o temperaturze T
Odejmując stronami równania układu równań (9) oraz dokonując przekształceń otrzymujemy następujący wzór:
Do tak otrzymanego równania wstawiamy za G równanie (10) oraz przekształcając otrzymujemy wzór:
3. Budowa stanowiska
Wykonywanie wielu pomiarów jest czasochłonne i obarczone ryzykiem wystąpienia błędów spowodowanych przez czynnik ludzki. Aby temu zapobiec zostało opracowane specjalne zautomatyzowane stanowisko do pomiarów parametrów kamer termowizyjnych. Zautomatyzowane stanowiska pomiarowe są niezwykle ważnym narzędziem w dziedzinie oceny jakości i kalibracji kamer termowizyjnych [17]. Pozwalają na dokładne badanie różnych parametrów i charakterystyk kamer termowizyjnych w sposób powtarzalny i kontrolowany. Dzięki temu możliwe jest zapewnienie wysokiej jakości i niezawodności tych urządzeń. Ponadto, opracowane stanowisko pomiarowe jest prawie całkowicie bezobsługowe, co znacznie przyspiesza wykonywanie pomiarów kalibracyjnych. Stanowisko składa się z elementów: technicznych ciał czarnych z możliwością nastaw temperatur, −ciała czarnego o temp eraturze otoczenia, stołu optycznego z blatem z otworami montażowymi w postaci siatki ortogonalnej otworów co 25 mm, −prowadnicy ze śrubą kulową wraz z wózkiem podwójnym, −kontrolera prowadnicy liniowej, −stołu optycznego, −komputera z oprogramowaniem sterującym.
Przekształcając pierwsze równanie układu (9) otrzymujemy:
=−⋅ (11)
Stanowisko umożliwia pracę całkowicie zdalną przez zaprogramowanie odpowiednich parametrów wewnątrz zainstalowanego kontrolera oraz sterowanie zewnętrzne przy zastosowaniu interfejsu komunikacyjnego USB lub/i Ethernet w celu sparowania stanowiska z własnym oprogramowaniem. Takie rozwiązanie umożliwia pracę automatyczną w procesach powtarzalnych lub podczas pojedynczych, często zmiennych pomiarów. Podstawowym interfejsem komunikacyjnym wykorzystywanym na przedstawionym stanowisku jest Ethernet. Testowane kamery jak i wykorzystane ciała czarne również komunikują się w ten sposób, co przyspieszyło wykonanie oprogramowania do sterowania zestawem z miejsca dogodnego dla osoby użytkującej sprzęt. Ważnym składnikiem stanowiska służącego do określania parametrów kamer termowizyjnych są powierzchnie techniczne ciała czarnego. Ciała te mają za zadanie generować równomierne
Rys. 1. Zdjęcie stanowiska do pomiaru parametrów kamer termowizyjnych
Fig. 1. Image of the test bench for measuring thermal camera’s parameters
Mariusz Mścichowski, Krzysztof Sawicki, Tomasz Sosnowski, Krzysztof Firmanty, Mariusz Kastek, Jarosław Bareła
Tabela 1. Podstawowe parametry technicznego ciała czarnego opracowanego i wykonanego w IOE WAT
Table 1. Basic parameters of the technical blackbody developed and manufactured at IOE WAT
Nazwa parametru
Wartość
Powierzchnia ciała czarnego 100 mm × 100 mm
Zakres stabilizacji temperatury absolutnej15–80 °C
Średnia emisyjność kierunkowa pod kątem 20° 0,985
Średnia emisyjność kierunkowa pod kątem 60° 0,973
Średnia emisyjność hemisferyczna 0,944
Dokładność ustawiania temperatury 0,01°C
Tabela 2. Podstawowe parametry technicznego ciała czarnego opracowanego i wykonanego w IOE WAT
Table 2. Basic parameters of the technical blackbody developed and manufactured at IOE WAT
Nazwa parametru
Wartość
Powierzchnia ciała czarnego 148 mm × 148 mm
Średnia emisyjność kierunkowa pod kątem 20° 0,985
Średnia emisyjność kierunkowa pod kątem 60° 0,973
Średnia emisyjność hemisferyczna 0,944
promieniowanie podczerwone, które oświetla matrycę detektorów badanej kamery termowizyjnej. Jednocześnie strumień generowanego promieniowania zależy od temperatury ciała czarnego. Dlatego też ciało czarne musi charakteryzować się wysokim współczynnikiem emisyjności oraz bardzo dobrą stabilnością utrzymywanej temperatury. W Tabeli 1 przedstawione zostały wybrane parametry wykorzystanego technicznego ciała czarnego. W celu umożliwienia automatycznej zmiany ciała czarnego, obserwowanego przez kamerę termowizyjną, zastosowano stolik wyposażony w programowalny kontroler. Ten stolik pełni rolę kompletnego urządzenia do realizacji modułu przemieszczeń liniowych. Konstrukcja modułu oparta jest na profilu aluminiowym, prowadnicy liniowej oraz dwóch wózkach. Moduł jest napędzany silnikiem krokowym, a ruch obrotowy kół zębatych przekształcany jest na ruch liniowy za pomocą śruby trapezowej, która nie rozciąga się w porównaniu do standardowo wykorzystywanych pasków zębatych. Rozdzielczość pozycjonowania wynosi 0,01 mm. Takie rozwiązanie gwarantuje precyzyjne i powtarzalne pozycjonowanie. Na płycie optycznej modułu przemieszczeń liniowych zaprojektowane zostały otwory w rozstawie 25 mm, umożliwiające precyzyjne mocowanie ciał czarnych i innych wymaganych elementów. Sterowanie silnikiem modułu odbywa się za pośrednictwem wbudowanego kontrolera, który umożliwia ustalenie dowolnego położenia wózka w całym zakresie pracy prowadnicy. Kontroler realizuje przesyłane polecenia sterujące przez interfejs USB i Ethernet we współpracy z oprogramowaniem sterującym lub oprogramowaniem zewnętrznym. Na stanowisku zamontowane zostało również ciało czarne referencyjne o temperaturze otoczenia. Jego parametry przedstawione zostały w Tabeli 2. Dzięki temu rozwiązaniu jesteśmy w stanie sprawdzić poprawność wyznaczonych parametrów korekcji kamer termowizyjnych. Na wózkach zaprojektowano płytę optyczną z otworami w standardowej siatce ortogonalnej o rozstawie 25 mm, co pozwala na dodatkowy montaż wymaganych ustandaryzowanych elementów. Jednym z najbardziej istotnych elementów zautomatyzowanego stanowiska do pomiaru parametrów kamer termowizyjnych
jest oprogramowanie. Ze względu na unikalność zastosowanych na stanowisku sposobów analizy i przetwarzania danych nie można było zastosować dostępnego oprogramowania. W związku z tym, całe oprogramowanie zostało opracowane w ramach prac nad tym stanowiskiem pomiarowym. Składa się ono z trzech modułów funkcjonalnych realizujących następujące zadania: sterowanie wszystkimi elementami stanowiska pomiarowego, −rejestracja i wstępne przetwarzanie danych pomiarowych, −wyznaczenie parametrów kamery termowizyjnej.
Sterowanie elementami stanowiska polega na m.in. ustawianiu parametrów ciał czarnych, sterowaniu stolikiem umożliwiające przemieszczanie ciał itp. Sposób sterowania jest bardzo istotny ze względu na konieczność osiągnięcia automatyzacji pomiarów i rejestracji. W tym celu oprogramowanie musi nie tylko ustawiać parametry poszczególnych elementów stanowiska, ale dokonywać tego w wymaganej kolejności oraz w odpowiednim czasie. W związku z tym, zostały opracowane scenariusze badawcze, które realizowało oprogramowanie. Algorytm przykładowego scenariusza służącego do wyznaczania współczynników został przedstawiony na rys. 2. Rejestracja i wstępne przetwarzanie danych jest zasadniczym etapem pomiaru. Dane zebrane podczas rejestracji służą do wyznaczenia parametrów kamery termowizyjnej. Podstawowa trudność rejestracji jest związana z terminowością wykonania rejestracji, wstępnego przetwarzania i zapisania danych na dysku. Terminowość pomiarów należy rozpatrywać w dwóch aspektach. Po pierwsze rejestracja musi zostać przeprowadzona w ściśle określonym momencie, w którym zostały poprawnie ustawione wszystkie parametry elementów stanowiska. W związku z tym rejestracja pomiarów musi zostać przewidziana w scenariuszu pomiarowym. Drugi aspekt terminowości jest związany z ilością rejestrowanych danych. Na stanowisku większość rejestrowanych danych to dane w postaci sekwencji termogramów. W związku
Początek
Rejestracja K ramek odpowiedzi detektorów matrycy dla temperatury T1 ciała czarnego
Rejestracja K ramek odpowiedzi detektorów matrycy dla temperatury T2 ciała czarnego
Wyznaczenie uśrednionych odpowiedzi detektorów matrycy dla temperatur T1 , T2 ciała czarnego
Wyznaczenie współczynników NUC Gij i Oij
Zapisanie współczynników NUC w pamięci kamery termowizyjnej
Rejestracja odpowiedzi kamery dla temperatury T3 ciała czarnego z korekcją NUC
Wyznaczenie szumu FPN dla odpowiedzi kamery zarejestrowanej dla temperatury T3
FPN<Noise T N
Koniec
Rys. 2. Algorytm przykładowego scenariusza do wyznaczania współczynników NUC
Fig. 2. Example of NUC coefficient determination algorithm
Mariusz Mścichowski, Krzysztof Sawicki, Tomasz Sosnowski, Krzysztof Firmanty, Mariusz Kastek, Jarosław Bareła
Rys. 3. Widok przykładowego okna oprogramowania do wyznaczenie parametrów kamery termowizyjnej dla różnych rejonów zainteresowania
Fig. 3. Exemplary view of the thermal camera’s service software window to adjust parameters for different regions of interest
z tym, należy w krótkim czasie zapisać dużą ilość informacji. Rejestracja danych jest o tyle krytyczna, ponieważ żadna dana nie może zostać utracona lub pominięta. Pominięcie jakiejkolwiek danej musi zostać przez oprogramowanie wykryte, a zarejestrowane dane uznane jako niewiarygodne. Dane termograficzne z kamery termowizyjnej są rejestrowane przez oprogramowanie z zastosowaniem interfejsu Ethernet. Zastosowanie tego interfejsu umożliwia przesyłanie danych do komputera bez konieczności użycia dodatkowego sprzętu.
Końcowym etapem działania stanowiska jest wyznaczenie parametrów kamery termowizyjnej. Operacja jest mniej krytyczna ze względu na czas, jednak wymaga dużej dokładności obliczeń. Ze względu na ilość przetwarzanych danych najczęściej nie jest możliwy bezpośredni nadzór i ocena badacza. Z tego powodu należy opracować metody obliczeniowe charakteryzujące się małymi błędami numerycznymi oraz odporne na krytyczne błędy np. dzielenie przez zero.
Na rysunku 3 przedstawiono przykładowy ekran oprogramowania realizującego wyznaczenie parametrów kamery termowizyjnej dla różnych rejonów zainteresowania.
4. Podsumowanie
W wyniku realizacji prac badawczych zostały opracowane metody pomiaru takich parametrów kamer termowizyjnych takich jak MRTD, NETD oraz korekcja niejednorodności odpowiedzi detektorów matrycy. Metody zostały zoptymalizowane w celu umożliwienia zautomatyzowanego pomiaru na specjalnie do tego celu opracowanym stanowisku. W ramach testowania stanowiska wykonano pomiary parametrów kamery termowizyjnej opracowanej na bazie detektora mikrobolometrycznego PICO640 Gen2 firmy LYNRED. Podstawowe parametry badanej kamery zostały przedstawione w tabeli 3. W wyniku przeprowadzonych rejestracji danych na stanowisku pomiarowym udało się wyznaczyć wartości wszystkich zamierzonych parametrów zarówno matrycy detektorów oraz całej kamery. Przykładowe wyniki rejestracji zostały przedstawione na rysunkach 4, 5, 6 i 7. Pomiary tych samych parametrów, tej samej kamery termowizyjnej zostały przeprowadzone w Laboratorium Akredytowanym Instytutu Optoelektroniki WAT na stanowisku pomiarowym METS-S-12. Stanowisko to składa się z: wzorca promieniowania podczerwieni, sterownika wzorca promieniowania, obrotowej
tarczy z zestawem testów, kolimatora podczerwieni, komputera wraz z oprogramowaniem i kartą video. W wyniku porównania rezultatów stwierdzono, że wartości NETD obiema metodami różnią się o ok. 3 mK (46 mK dla opracowanej metody, i 49 mK dla stanowiska METS-S-12). Wyznaczone niejednorodności resztkowe różnią się poniżej 0,6 %, zaś charakterystyki MRTD uzyskane obydwoma metodami są zbieżne.
Tabela 3. Parametry kamery termowizyjnej
Table 3. Thermal camera parameters
Nazwa parametru Wartość
Zakres widmowy LWIR 8–14 µm
Rozdzielczość 640 px × 480 px
Wielkość detektora 17 µm
Częstotliwość ramki 30 Hz
Ogniskowa 19 mm
Kąty pola widzenia 32° × 24° F – number (liczba otworowa) F/1.0
Transmisja obiektywu > 94 %
Dla obu sposobów pomiaru parametrów kamery wyznaczono niepewności wyniku pomiaru zgodnie z wytycznymi określającymi model matematyczny procesu pomiarowego, w którym wielkości wejściowe reprezentują wszystkie istotne źródła błędów [18, 19] (np. dokładność i stabilność ciała doskonale czarnego, wahania temperatury otoczenia). Przykładowo dla obu metod pomiaru MRTD niepewność rozszerzona nie przekraczała 0,02 K.
Niezaprzeczalną zaletą stanowiska jest znaczna automatyzacja pomiarów i wyznaczania parametrów, uzyskaną głównie przez zastosowanie autorskiego oprogramowania do sterowania, rejestracji i obliczania wartości parametrów. Oprogramowanie pozwala na wielokrotne powtarzanie pomiarów z dużą wiarygodnością oraz zmniejszenie wpływu błędów popełnianych przez człowieka. Opracowane metody i stanowisko umożliwiają symulowanie różnych warunków pomiarowych. Pozwala to na
Rys. 4. Termogram zarejestrowany kamerą termowizyjną przed korekcją
Fig. 6. Distribution of the gain correction coefficients G(m, n) determined for the tested camera
ocenę jakości i porównanie badanych kamer termowizyjnych pod kątem bardzo wielu parametrów.
Podziękowania
Badania współfinansowane przez Narodowe Centrum Badań i Rozwoju w ramach programu Ścieżka dla Mazowsza w projekcie pt. „FOTONICA (Fully-automated Optoelectronic System for Noninvasive Imaging in Clinical Applications) –Sztuczna Inteligencja wspomagająca zaawansowane rozwiązania fotoniczne w automatycznych diagnostycznych systemach medycznych” umowa nr MAZOWSZE/0167/19-00. Praca została dofinansowana przez Wojskową Akademię Techniczną w ramach projektu nr UGB 724/2022.
Bibliografia
1. Machoy M., Szyszka-Sommerfeld L., Rahnama M., Koprowski R., Wilczyński S., Woźniak K., Diagnosis of temporomandibular disorders using thermovision imaging, “Pain Research and Management”, 2020, DOI: 10.1155%2F2020%2F5481365.
2. Fricova J., Janatova M., Anders M., Albrecht J., Rokyta R., Thermovision: a new diagnostic method for orofacial pain? “Journal of Pain Research”, Vol. 11, 2018, 3195–3203, DOI: 10.2147%2FJPR.S183096.
3. Wideł M.P., Masarczyk W., Grzegorczyn S., Thermovision analysis of the surface of the lower limbs in patients with symptomatic lumbosacral discopathy before and after surgery, “Polish Annals of Medicine”, Vol. 29, No. 1, 2022, DOI: 10.29089/2020.20.00160.
Rys. 5. Rozkład współczynników korekcji offsetu wyznaczone dla badanej kamery
Fig. 5. Distribution of the correction coefficients’ offsets determined for the tested camera
Rys. 7. Termogram po zastosowaniu korekcji offsetu i wzmocnień Fig. 7. Thermogram after applying offset and gain corrections
4. Roelfsema P.R., Shibai H., Armus L., Arrazola D., Audard M., Audley M., Bradford C., Charles I., Dieleman P., Doi Y. i in., SPICA—a large cryogenic infrared space telescope: unveiling the obscured universe, “Publications of the Astronomical Society of Australia”, Vol. 35, 2018, DOI: 10.1017/pasa.2018.15.
5. Veenendaal I., Naylor D., Gom B., Christiansen A., Jellema W., Feenstra C., Ridder M., Eggens M., Ade P., An angle-scanned cryogenic Fabry– Pérot interferometer for far-infrared astronomy, “Review of Scientific Instruments”, Vol. 91, No. 8, 2020, DOI: 10.1063/5.0012432.
6. Klapp I., Yafin P., Oz N., Brand O., Bahat I., Goldshtein E., Cohen Y., Alchanatis V., Sochen N., Computational end-to-end and super-resolution methods to improve thermal infrared remote sensing for agriculture, “Precision Agriculture”, Vol. 22, 2021, 452–474, DOI: 10.1007/s11119-020-09746-y.
7. Ranilović B., Cukrov A., Boras I., Svaić S., Zovko M., Infrared Thermography as a Prediction Tool for the Irrigation Requirement in Agriculture , “Transactions of FAMENA”, Vol. 45, No. SI-1, 2021, 23–34, DOI: 10.21278/TOF.SI1006621.
8. Gršić J.Z., Jurečić D., Golubić L.T., Žiljak V., Hidden Information in Uniform Design for Visual and Near-Infrared Spectrum and for Inkjet Printing of Clothing on Canvas to Enhance Urban Security, “Applied Sciences”, Vol. 12, No. 4, 2022, DOI: 10.3390/app12042152.
9. Liu Q., Yuan D., Fan N., Gao P., Li X., He Z., Learning dual-level deep representation for thermal infrared tracking,
“IEEE Transactions on Multimedia”, Vol. 25, 2022, 1269–1281, DOI: 10.1109/TMM.2022.3140929.
10. Yang C.S., Jin F., Trivedi S., Brown E., Hömmerich U., Nemes L., Samuels A.C., In situ chemical analysis of geology samples by a rapid simultaneous ultraviolet/visible/ near-infrared (UVN) + longwave-infrared laser induced breakdown spectroscopy detection system at standoff distance, “Optics Express”, Vol. 27, No. 14, 2019, 19 596–19 614, DOI: 10.1364/OE.27.019596.
11. Pastuszak P., Termografia aktywna w analizie uszkodzeń cylindrycznych struktur kompozytowych; “Przegląd Spawalnictwa”, R. 86, Nr 11, 2014.
12. Noszczyk P., Nowak H., Termografia aktywna jako nowoczesna metoda badań elementów żelbetowych, „Czasopismo Inżynierii Lądowej, Środowiska i Architektury”, Vol. 63, Nr 3, 2016, 279–286, DOI: 10.7862/rb.2016.211.
13. Holst G.C., Electro-optical imaging system performance, Sixth Edit. Washington: Society of Photo Optical, 2017, ISBN: 978-1-5106-1102-3, DOI: 10.1117/3.2588947.
14. Bareła J., Firmanty K.L., Kastek M.W., Długaszek A., Stanowiska do pomiaru podstawowych parametrów kamer termowizyjnych spełniające wymogi metrologiczne WP, „Biuletyn Wojskowej Akademii Technicznej”, T. 61, Nr 2, 2012, 81–91.
15. NATO, STANAG 4349, NATO Standardization Agency, 1995.
16. Gogler S., Sawicki K., Ligienza A., Mścichowski M., Metoda pomiaru minimalnej rozróżnialnej różnicy temperatury w funkcji rozogniskowania kamery termowizyjnej, „Pomiary Automatyka Robotyka”, Vol. 28, No. 2, 2024, 99–106, DOI: 10.14313/PAR_252/99.
17. Sosnowski T., Madura H., Firmanty K., Bareła J., Bieszczad G., Kubicki J., Zautomatyzowane stanowisko do wyznaczania wartości parametrów i kalibracji obserwacyjnych kamer termowizyjnych, „Pomiary Automatyka Kontrola”, Vol. 59, No. 9, 2013, 962–965.
19. Test Operations Procedures (TOP) 6-3-014 Methodology Plan For resolvable Temperature Difference (MRTD) testing of Aircraft Installed Sensors, Section: Technical Reports, Alabama, 2011.
Measurement of Thermal Camera’s Parameters’ Method Using an Automated Test Bench
Abstract: To achieve precise and repeatable measurements of thermal camera’s parameters, it is essential to eliminate human error. For this purpose, an automated test bench has been developed that allows fully automatic, semi-automatic and manual control of the measurement process. The designed stand supports remote control via Ethernet interface or USB connection. The developed software enables control, data recording and parameter determination of thermal cameras. The test bench ensures high quality and reliability of thermal measurements, enabling controlled examination of camera characteristics with minimal operator involvement.
Keywords: thermal cameras, parameter measurement, automated test bench, NETD, MRTD, non-uniformity correction, thermovision system
inż. Mariusz Mścichowski
mariusz.mscichowski@wat.edu.pl
ORCID: 0000-0002-0079-1960
Student Wydziału Elektroniki Wojskowej Akademii Technicznej. Jego zawodowe zainteresowania skupiają się na cyfrowych pomiarowych układach elektronicznych oraz szybkim prototypowaniu FDM.
dr inż. Krzysztof Sawicki
krzysztof.sawicki@wat.edu.pl
ORCID: 0000-0002-1368-3854
Ukończył studia na Wydziale Elektroniki Wojskowej Akademii Technicznej w 2009 r.; rozprawa doktorska z tematyki steganografii w sieciach bezprzewodowych obroniona w WAT w 2019 r.; jego zainteresowania skupiają się na sieciach bezprzewodowych, bezpieczeństwie teleinformatycznym, steganografii i systemach wbudowanych.
dr inż. Tomasz Sosnowski tomasz.sosnowski@wat.edu.pl
ORCID: 0000-0003-4082-8366
Absolwent Wydziału Elektroniki Wojskowej Akademii Technicznej (1993). Tytuł doktora nauk technicznych uzyskał w 2003 r. Zajmuje się problematyką związaną z projektowaniem i programowaniem systemów cyfrowych, cyfrową analizą sygnału, analizą obrazu termograficznego, a także zastosowaniem układów mikroprocesorowych i programowalnych w technice podczerwieni.
dr inż. Mariusz Kastek mariusz.kastek@wat.edu.pl
ORCID: 0000-0001-7184-5228
Absolwent Wydziału Elektroniki Wojskowej Akademii Technicznej (1993). Od 1997 r. pracuje w Instytucie Optoelektroniki Wojskowej Akademii Technicznej. Tytuł doktora nauk technicznych uzyskał w 2002 r. Zajmuje się problematyką związaną z detekcją obiektów w systemach podczerwieni, a także analizą sygnałów i algorytmami detekcji implementowanymi w urządzeniach podczerwieni. Autor lub współautor ponad 70 publikacji.
dr inż. Krzysztof Firmanty krzysztof.firmanty@wat.edu.pl
ORCID: 0000-0002-9124-6561
Absolwent Wydziału Elektroniki Wojskowej Akademii Technicznej (1993). Od 1993 r. pracownik Wojskowej Akademii Technicznej. Tytuł doktora nauk technicznych uzyskał w 2003 r. Zajmuje się problematyką detekcji obiektów w systemach podczerwieni oraz analizą sygnałów i algorytmami detekcji zaimplementowanymi w urządzeniach podczerwieni. Autor i współautor ponad 60 publikacji. Pracuje jako adiunkt w Instytucie Optoelektroniki Wojskowej Akademii Technicznej.
dr inż. Jarosław Bareła jaroslaw.barela@wat.edu.pl
ORCID: 0000-0001-9158-1354
Absolwent Wojskowej Akademii Technicznej (1997). Stopień naukowy doktora nauk technicznych uzyskał w 2004 r. w zakresie elektroniki –specjalność optoelektronika. Głównym obszarem jego pracy jest programowanie systemów mikroprocesorowych, projektowanie odbiorników promieniowania w zakresie podczerwieni, prowadzenie badań przyrządów noktowizyjnych i termowizyjnych. W swoim dorobku naukowym posiada ponad 40 publikacji, w tym artykuły, referaty i wdrożenia.
Informacje dla Autorów
Za artykuł naukowy – zgodnie z Komunikatem Ministra Nauki i Szkolnictwa Wyższego z dnia 29 maja 2013 r. w sprawie kryteriów i trybu oceny czasopism naukowych – należy rozumieć artykuł prezentujący wyniki oryginalnych badań o charakterze empirycznym, teoretycznym, technicznym lub analitycznym zawierający tytuł publikacji, nazwiska i imiona autorów wraz z ich afiliacją i przedstawiający obecny stan wiedzy, metodykę badań, przebieg procesu badawczego, jego wyniki oraz wnioski, z przytoczeniem cytowanej literatury (bibliografię). Do artykułów naukowych zalicza się także opublikowane w czasopismach naukowych opracowania o charakterze monograficznym, polemicznym lub przeglądowym, jak również glosy lub komentarze prawnicze.
Wskazówki dla Autorów przygotowujących artykuły naukowe do publikacji
Artykuły naukowe zgłoszone do publikacji w kwartalniku naukowotechnicznym Pomiary Automatyka Robotyka powinny spełniać następujące kryteria formalne: – t ytuł artykułu (nieprzekraczający 80 znaków) w języku polskim oraz angielskim,
– imię i nazwisko Autora/Autorów, adres e-mail, afiliacja (instytucja publiczna, uczelnia, zakład pracy, adres), – s treszczenie artykułu (o objętości 150–200 słów) w języku polskim oraz angielskim, – s łowa kluczowe (5–8 haseł) w języku polskim oraz w języku angielskim angielskim,
– z asadnicza część artykułu – w języku polskim (lub w j. angielskim), – podpisy pod rysunkami w języku polskim oraz w języku angielskim, – t ytuły tabel w języku polski oraz w języku angielskim, – ilustracje/grafika/zdjęcia jako osobne pliki w formacie .eps, .cdr, .jpg lub .tiff, w rozdzielczości min. 300 dpi, min. 1000 pikseli szerokości, opisane zgodnie z numeracją grafiki w tekście.
Artykuł powinien mieć objętość równą co najmniej 0,6 arkusza wydawniczego, nie powinien przekraczać objętości 1 arkusza wydawniczego (40 000 znaków ze spacjami lub 3000 cm2 ilustracji, wzorów), co daje ok. 8 stron złożonego tekstu. W przypadku artykułów przekraczających tę objętość sugerowany jest podział na części. Nie drukujemy komunikatów!
Do artykułu muszą być dołączone notki biograficzne wszystkich Autorów (w języku artykułu) o objętości
500–750 znaków oraz ich aktualne fotografie.
Redakcja zastrzega sobie prawo dokonywania skrótów, korekty językowej i stylistycznej oraz zmian terminologicznych.
Przed publikacją autorzy akceptują końcową postać artykułu.
System recenzencki PAR
Redakcja przyjmuje wyłącznie artykuły oryginalne, wcześniej niepublikowane w innych czasopismach, które przeszły etap weryfikacji redakcyjnej
Autorzy ponoszą całkowitą odpowiedzialność za treść artykułu. Autorzy materiałów nadesłanych do publikacji są odpowiedzialni za przestrzeganie prawa autorskiego. Zarówno treść pracy, jak i zawarte w niej ilustracje, zdjęcia i tabele muszą stanowić dorobek własny Autora, w przeciwnym razie muszą być opisane zgodnie z zasadami cytowania, z powołaniem się na źródło.
Oddaliśmy do dyspozycji Autorów i Recenzentów System Recenzencki, który gwarantuje realizację tzw. podwójnie ślepej recenzji. Przesyłając artykuł do recenzji należy usunąć wszelkie elementy wskazujące na pochodzenie artykułu – dane Autorów, ich afiliację, notki biograficzne.
Dopiero po recenzji i poprawkach sugerowanych przez Recenzentów artykuł jest formatowany zgodnie z przyjętymi zasadami. W przypadku zauważonych problemów, prosimy o kontakt z Redakcją.
Kwartalnik naukowotechniczny Pomiary Automatyka Robotyka jest indeksowany w bazach BAZTECH, Google Scholar oraz INDEX COPERNICUS (ICV 2022: 91,28), a także w bazie naukowych i branżowych polskich czasopism elektronicznych ARIANTA. Przyłączając się do realizacji idei Otwartej Nauki, udostępniamy bezpłatnie wszystkie artykuły naukowe publikowane w kwartalniku naukowo-technicznym Pomiary Automatyka Robotyka. Punktacja Ministerstwa Edukacji i Nauki za publikacje naukowe w kwartalniku Pomiary Automatyka Robotyka wynosi obecnie 70 pkt. (wykaz czasopism naukowych i recenzowanych materiałów z konferencji międzynarodowych z dnia 5 stycznia 2024 r., poz. 29984, Unikatowy Identyfikator Czasopisma 200205). Przypisane dyscypliny naukowe – automatyka, elektronika, elektrotechnika i technologie kosmiczne.
Oświadczenie dotyczące jawności informacji o podmiotach przyczyniających się do powstania publikacji
Redakcja kwartalnika naukowotechnicznego Pomiary Automatyka Robotyka , wdrażając politykę Ministra Nauki i Szkolnictwa Wyższego odnoszącą się do dokumentowania etycznego działania Autorów, wymaga od Autora/Autorów artykułów podpisania przed przyjęciem artykułu do druku druku w kwartalniku oświadczenia zawierającego:
1. i nformację o udziale merytorycznym każdego wymieniowego Autora w przygotowaniu publikacji –celem jest wykluczenie przypadków tzw. „guest authorship”, tj. dopisywania do listy Autorów publikacji nazwisk osób, których udział w powstaniu publikacji był znikomy albo w ogóle nie miał miejsca.
2. i nformację o uwzględnieniu w publikacji wszystkich osób, które miały istotny wpływ na jej powstanie – celem jest: – p otwierdzenie, że wszystkie osoby mające udział w powstaniu pracy zostały uwzględnione albo jako współautorzy albo jako osoby, którym autor/autorzy dziękują za pomoc przy opracowaniu publikacji, – p otwierdzenie, że nie występuje przypadek „ghostwriting”, tzn. nie występuje sytuacja, w której osoba wnosząca znaczny wkład w powstanie artykułu nie została wymieniona jako współautor ani nie wymieniono jej roli w podziękowaniach, natomiast przypisano autorstwo osobie, która nie wniosła istotnego wkładu w opracowanie publikacji;
3. informację o źródłach finansowania badań, których wyniki są przedmiotem publikacji – w przypadku finansowania publikacji przez instytucje naukowo-badawcze, stowarzyszenia lub inne podmioty, wymagane jest podanie informacji o źródle środków pieniężnych, tzw. „financial disclosure” – jest to informacja obligatoryjna, nie koliduje ze zwyczajowym zamieszczaniem na końcu publikacji informacji lub podziękowania za finansowanie badań.
Umowa o nieodpłatne przeniesienie praw majątkowych do utworów z zobowiązaniem do udzielania licencji CC-BY
Z chwilą przyjęcia artykułu do publikacji następuje przeniesienie majątkowych praw autorskich na wydawcę. Umowa jest podpisywana przed przekazaniem artykułu do recenzji. W przypadku negatywnych recenzji i odrzucenia artykułu umowa ulega rozwiązaniu.
Redakcja na mocy udzielonej licencji ma prawo do korzystania z utworu, rozporządzania nim i udostępniania dowolną techniką, w tym też elektroniczną oraz ma prawo do rozpowszechniania go dowolnymi kanałami dystrybucyjnymi.
Zapraszamy do współpracy
Poza artykułami naukowymi publikujemy również materiały informujące o aktualnych wydarzeniach, jak konferencje, obronione doktoraty, habilitacje, uzyskane profesury, a także o realizowanych projektach, konkursach – słowem, o wszystkim, co może interesować i integrować środowisko naukowe. Zapraszamy do recenzowania/ polecania ciekawych i wartościowych książek naukowych.
Podczas cytowania artykułów publikowanych w kwartalniku naukowo-technicznym
Pomiary Automatyka Robotyka prosimy o podawanie nazwisk wszystkich autorów, pełną nazwę czasopisma oraz numer DOI, np.:
Ewa Chodakowska, Andrzej Polecki, Cross-National Comparison of Technology Innovation Capabilities in Automation and Robotics, „Pomiary Automatyka Robotyka”, ISSN 1427-9126, R. 28, Nr 3/2024, 5–20, DOI: 10.14313/PAR_253/5.
REPOZYTORIUM ROBOTYKI
Podsumowanie pięciu dekad rozwoju robotyki i dziedzin pokrewnych w zdigitalizowanej formie.
Przeszłość i teraźniejszość w jednej interaktywnej bazie wiedzy.
Podsumowanie pięciu dekad rozwoju robotyki i dziedzin pokrewnych w zdigitalizowanej formie.
Bezpłatny dostęp do zgromadzonych w Łukasiewicz – PIAP prac naukowych, badawczych i rozwojowych, a także raportów z badań, opisów projektów i filmów z wdrożeń.
Przeszłość i teraźniejszość w jednej interaktywnej bazie wiedzy.
Bezpłatny dostęp do zgromadzonych w Łukasiewicz – PIAP prac naukowych, badawczych i rozwojowych, a także raportów z badań, opisów projektów i filmów z wdrożeń.
73
83
93
Marcin M. Czajka, Daria Kubacka, Jacek Michalski, Robert Bączyk, Piotr Kozierski
Porównanie metod sterowania adaptacyjnego dla stołu balansującego kulą
Dariusz Rzońca, Andrzej Bożek Optymalizacja mieszanego odczytu zmiennych binarnych i rejestrowych w protokole Modbus ze sterownika PLC implementującego CPDev
Marcin Hubacz, Jan Sadolewski, Bartosz Trybus Model i implementacja dwurdzeniowego sterownika programowalnego opartego na maszynie wirtualnej
Paweł Nowak, Michał Nowicki, Piotr Gazda, Piotr Frydrych, Natalia Nowicka, Roman Szewczyk Zastosowanie Metody Elementów Skończonych do analizy metody określania rozmiaru buta na podstawie pomiarów pola magnetycznego 109
101
117
123
131
Tomasz Buratowski, Mariusz Giergiel, Piotr Wójcicki, Jerzy Garus, Rafał Kot Safe and Reliable Movement of Fast LiDAR-based Self-driving Vehicle
Krzysztof Oprzędkiewicz
Numerical Analysis of the Discrete, Fractional Order PID Controller Using FOBD Approximation
Mateusz Salach, Arkadiusz Stęchły, Andrzej Paszkiewicz, Patryk Organiściak, Grzegorz Budzik Sterowanie kobotem za pomocą wirtualnej rzeczywistości dla potrzeb Przemysłu 4.0
Mateusz Mścichowski, Krzysztof Sawicki, Tomasz Sosnowski, Krzysztof Firmanty, Mariusz Kastek, Jarosław Bareła Metoda pomiaru parametrów kamer termowizyjnych za pomocą zautomatyzowanego stanowiska pomiarowego