Kandinsky’s Dance Curves Exploration:
Abstraction and Infusion
Prepared By: Group 1
ARCH 5231B

Kandinsky’s Dance Curves Exploration:
Abstraction and Infusion
Prepared By: Group 1
ARCH 5231B
Lacan’s Mirror Stage theory suggested that human beings are able to distinguish subject and object by the looking self into the mirror before the age of 3, such recognition is enlightened by the gaze one self have to the mirror.
In a environment which one grow up in, one are both the subject and object, with the assumption being said, the environment we live in shaped our behavior and at the same time we shape the environment.
In search on the logic of cities and buidings with the notations of movements
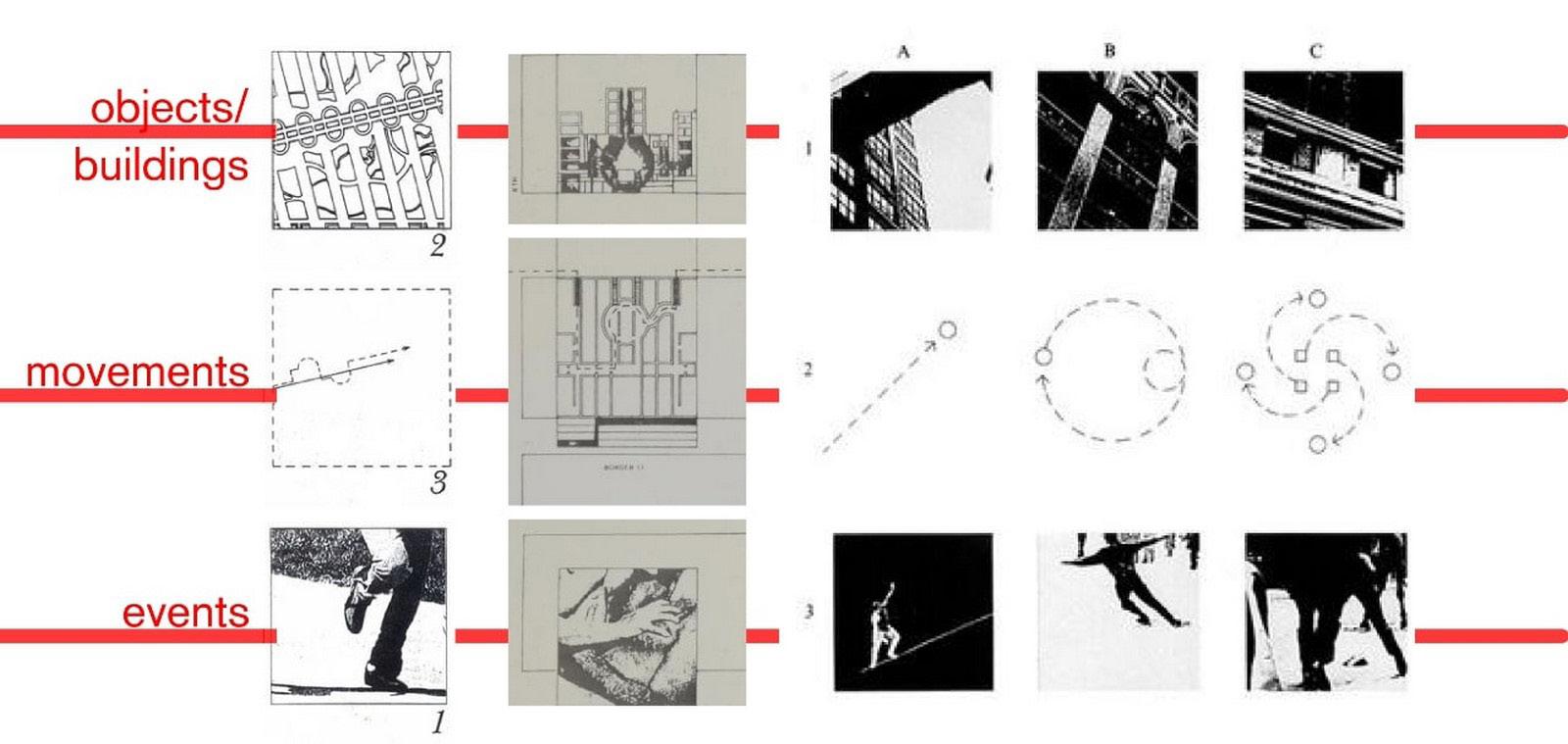 The Manhattan Transcript by Bernard Tschumi
The Manhattan Transcript by Bernard Tschumi
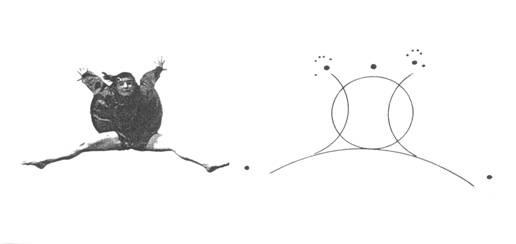
Interpreting body movement as geometric curves
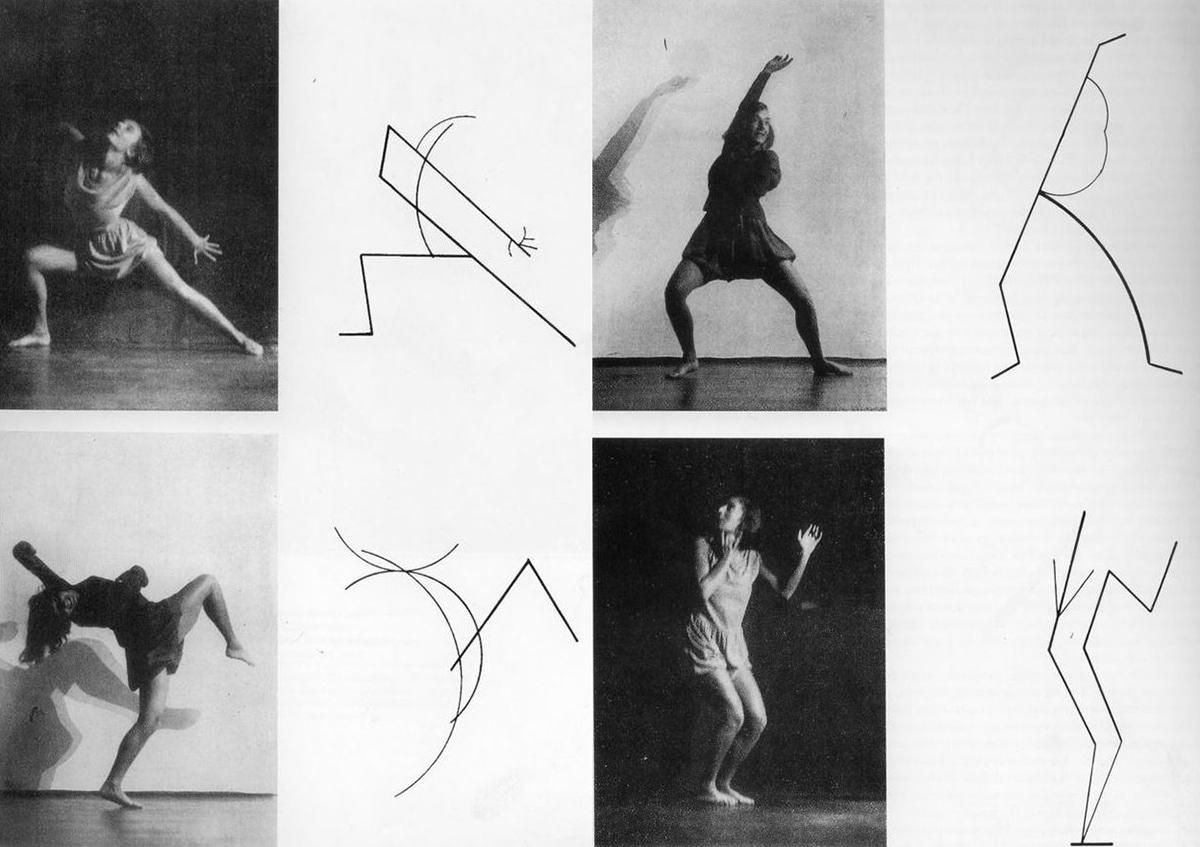 Dance of Palucca by Wassily Kandinsky
Dance of Palucca by Wassily Kandinsky
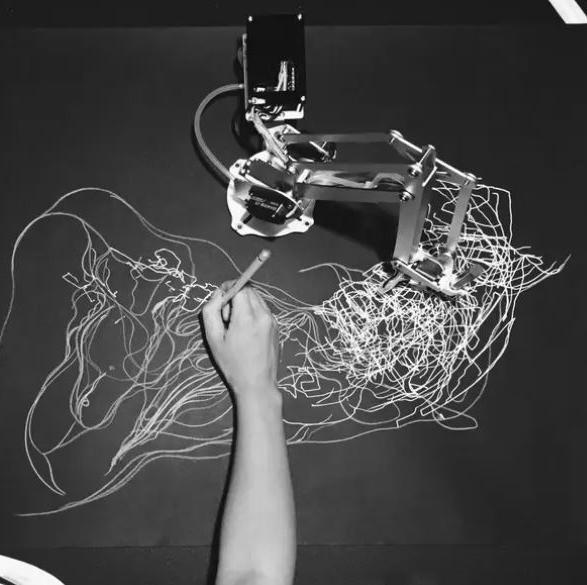
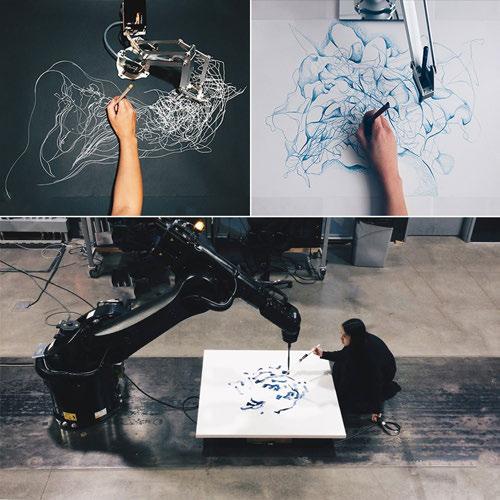
Robotic Arm has the potential to act as human joints and move like human joints
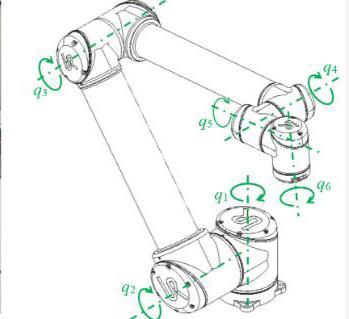
 Potential of Robotic Arm in terms of movement
Potential of Robotic Arm in terms of movement
 Dance Synchronization by Dr. Merritt Moore
Dance Synchronization by Dr. Merritt Moore
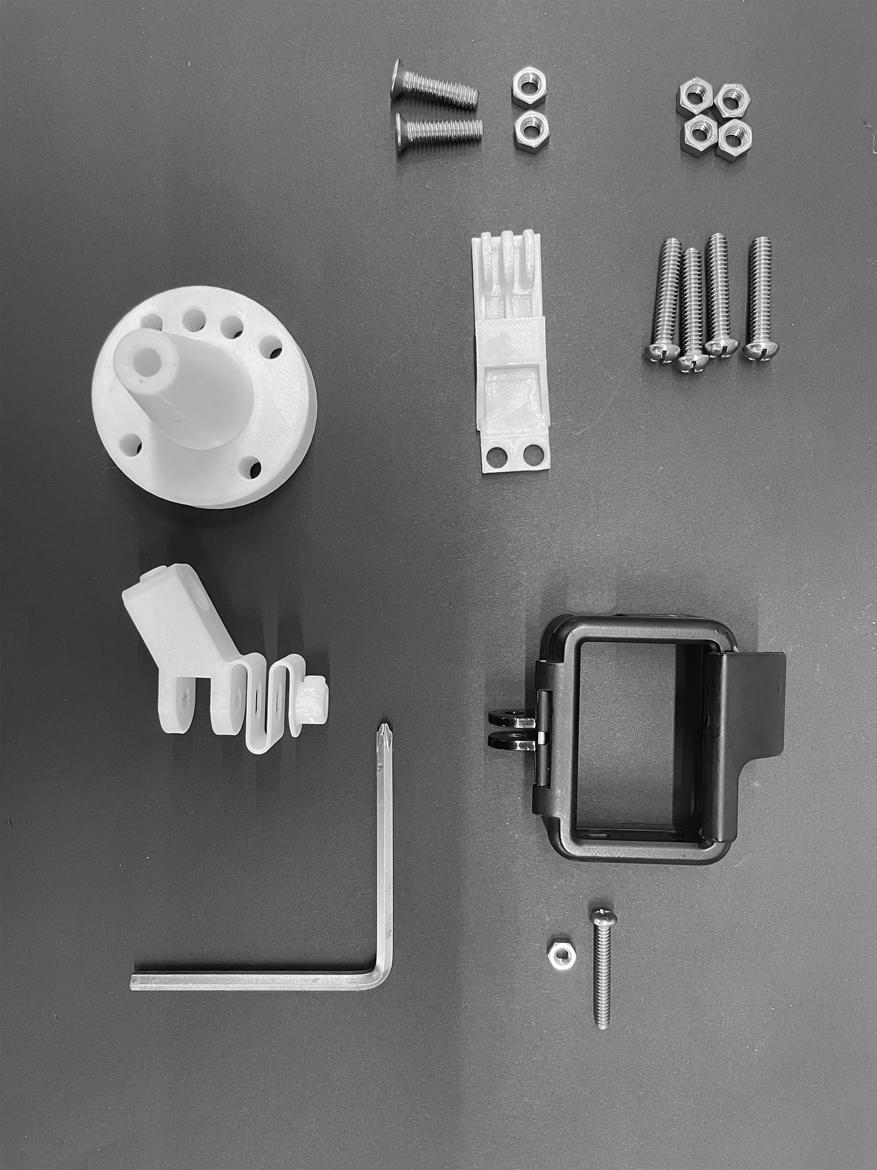
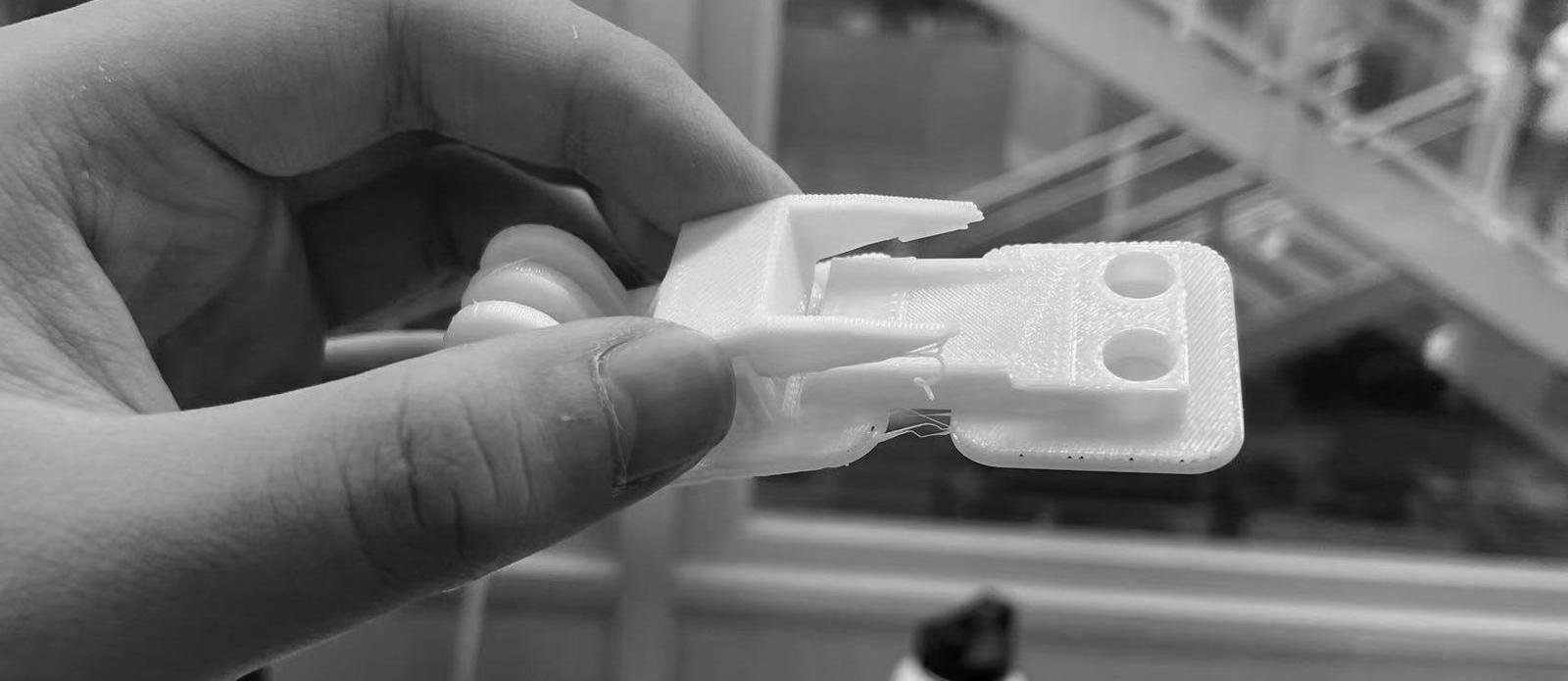
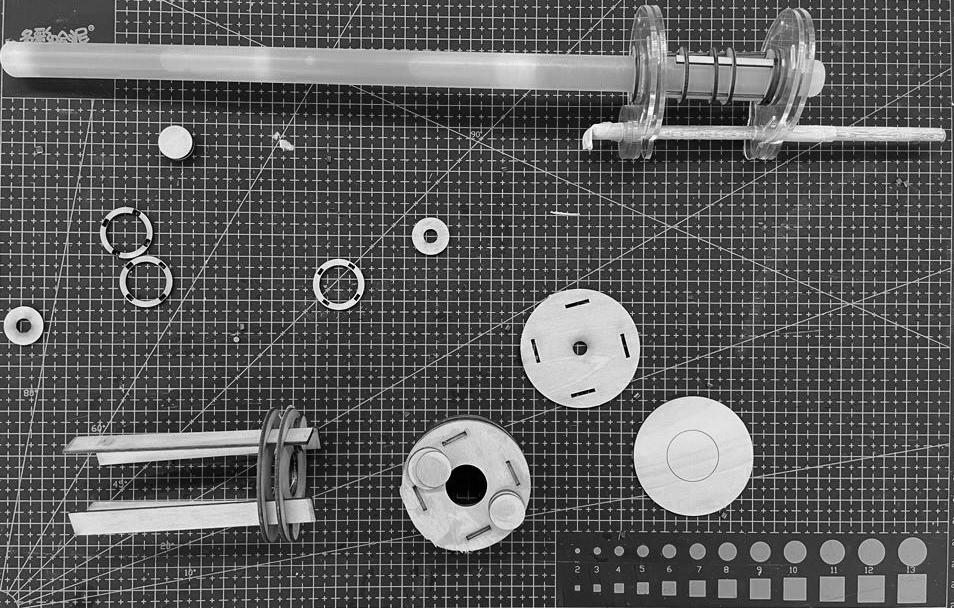
As a crucial tool for the robotic arm to interact with the environment, the end effector is the peripheral medium for expression.
This section will discuss and go through the design process of the end effector of the project.


 Rotrics Robotic Arm Drawing Starter Kit MIT Robotic Arm Gestures Mimicking Devices
3D Printer Screw for movement
Rotrics Robotic Arm Drawing Starter Kit MIT Robotic Arm Gestures Mimicking Devices
3D Printer Screw for movement
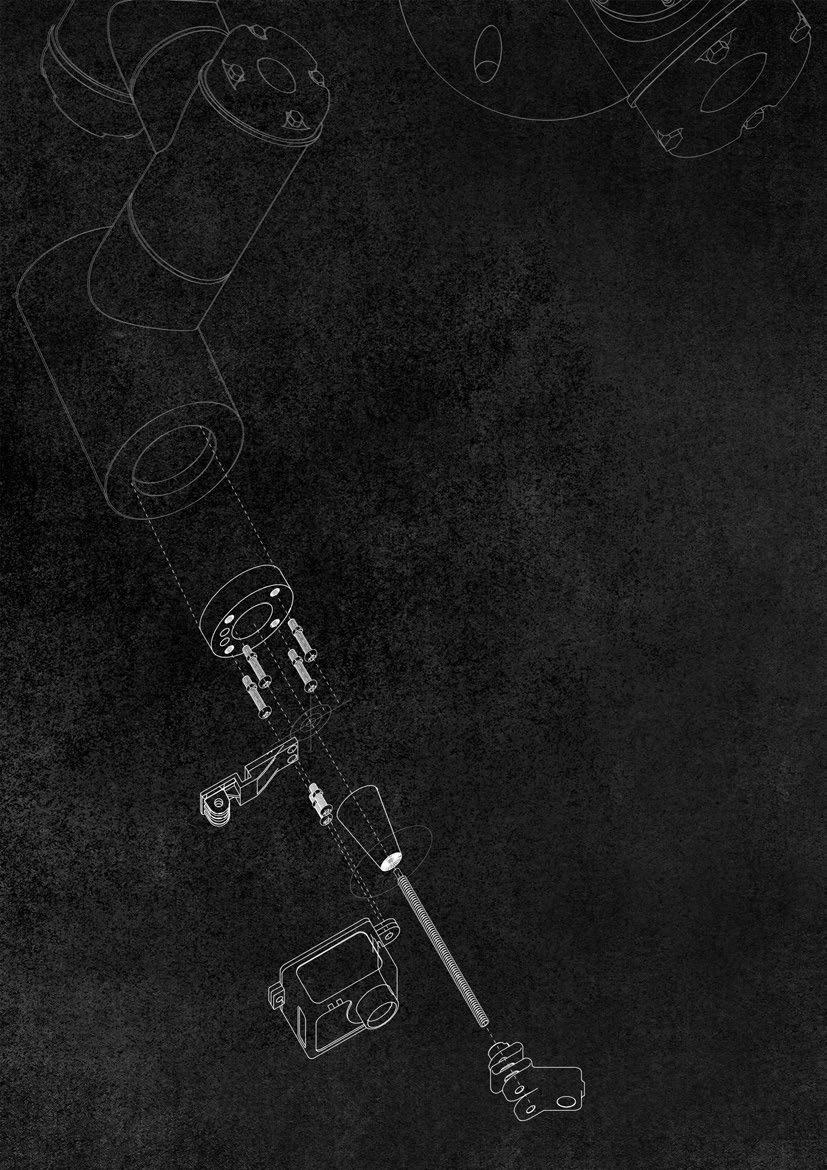
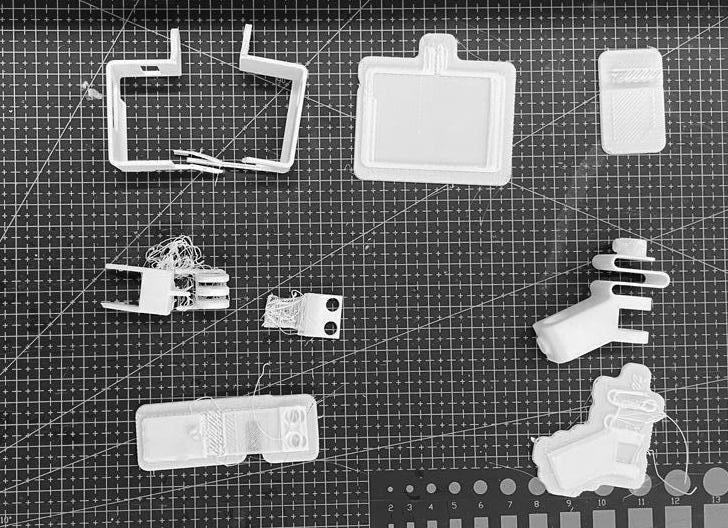
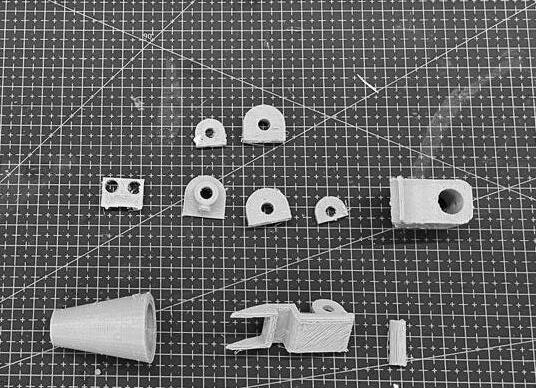
End Effector parts disassemble
End Effector Exploded Axonometric

3D Printing Design Failure
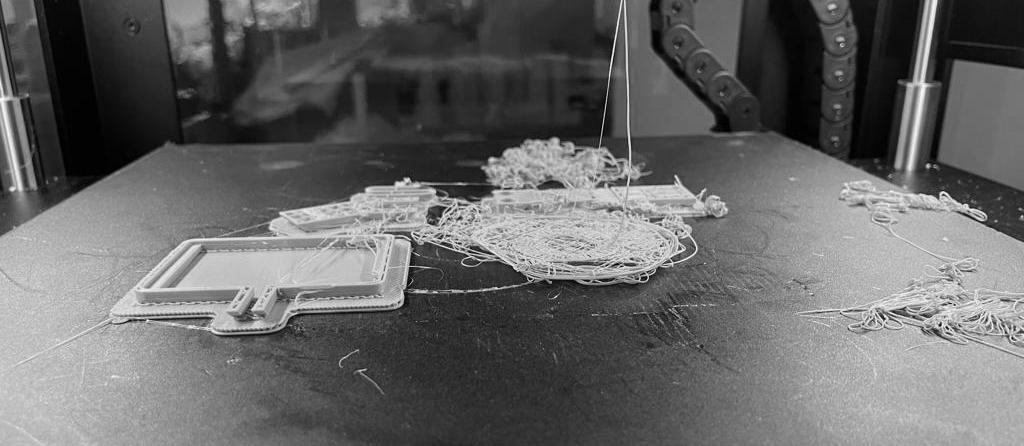
 3D Printing Design Failure (Go Pro Mounting Structure too thin)
3D Printing Design Failure (Go Pro Mounting Structure too thin)
3D Printing Structural Failure
How can we reimagine the dialogue between body movement and space?
Kandinsky work emphasize on the simplification of movement to be expressed by curves translated two-dimentionally on paper
In modern times, robotic arm and Artificial Intelligence can follow mimick human drawing movement
Can we explore the relationship in a three dimensional expression with the assist of robotic arm and body tracking devices?

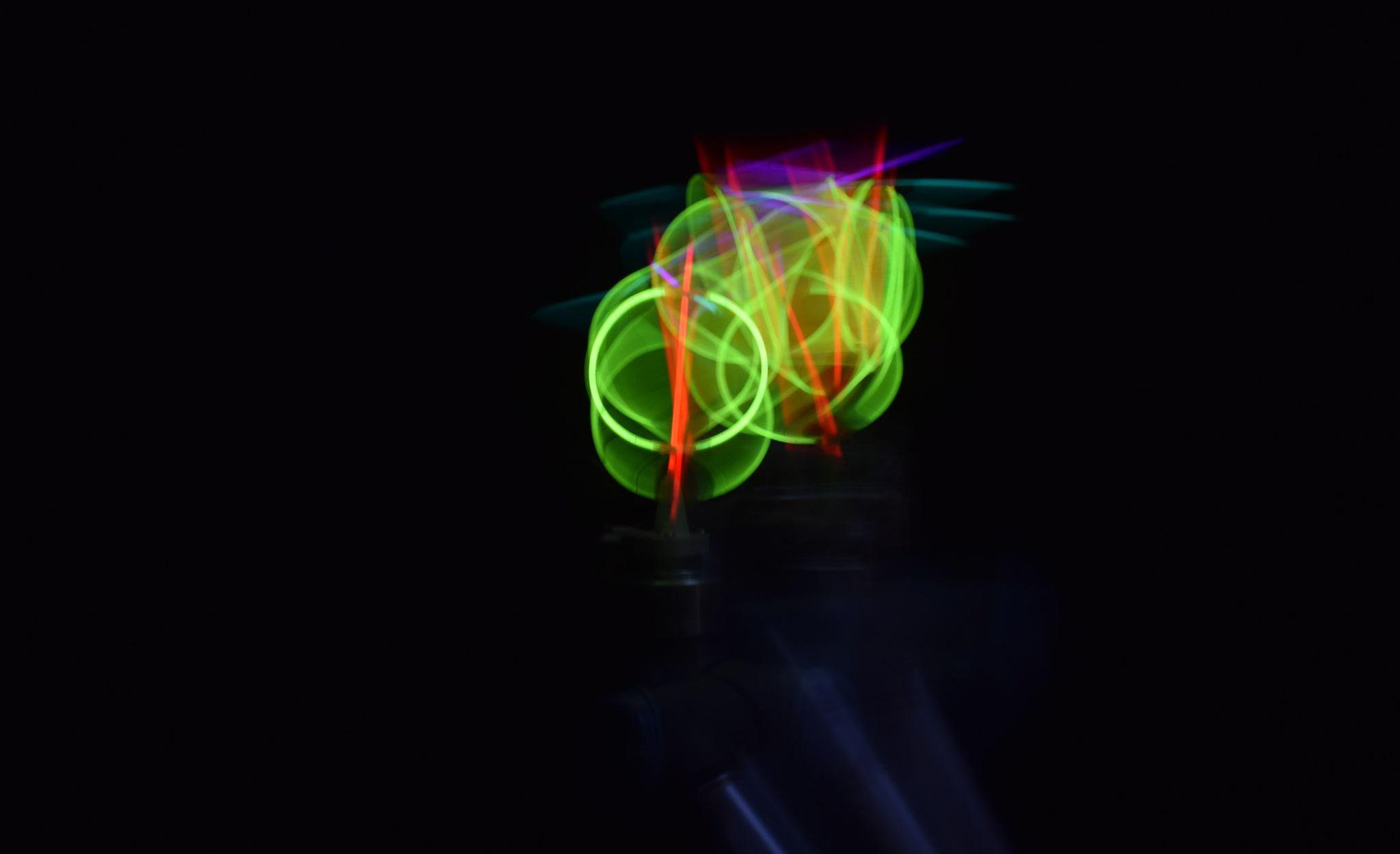
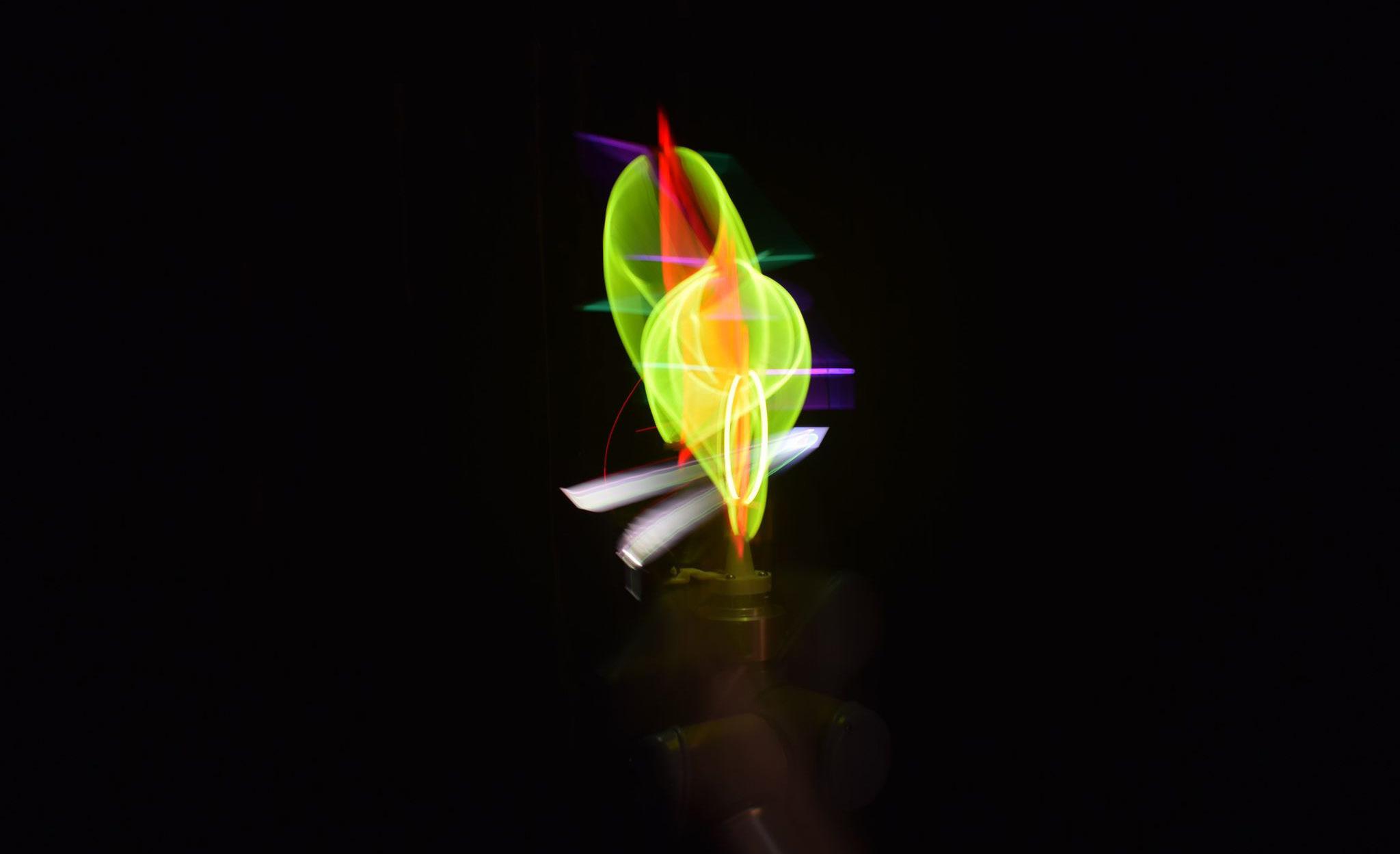
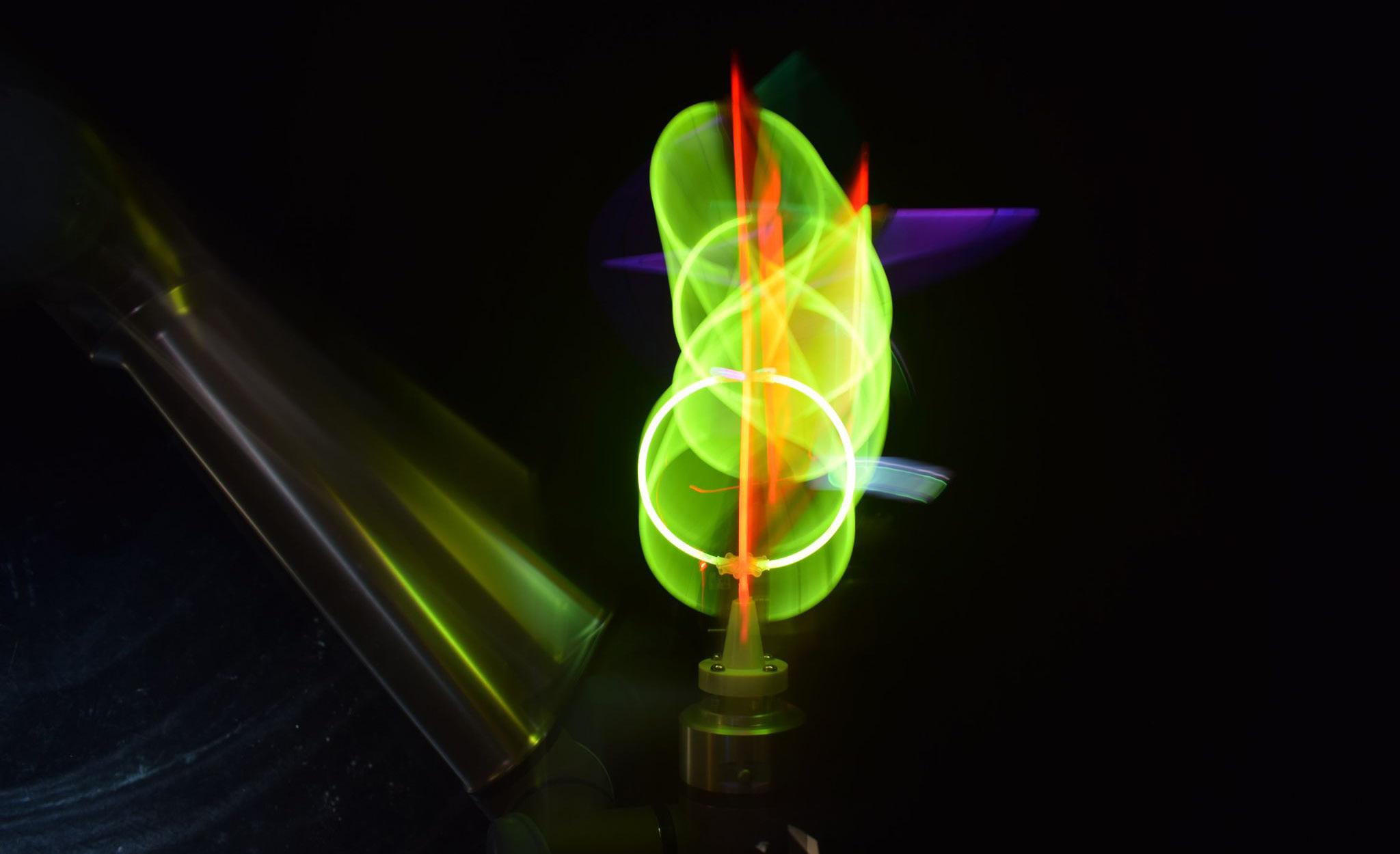
Light Painting captures movement of light within a period of time by adjusting the shutter, where light flows multidimensional

Converting dance movement into threedimensional curve and deploy light painting to record the visualisation

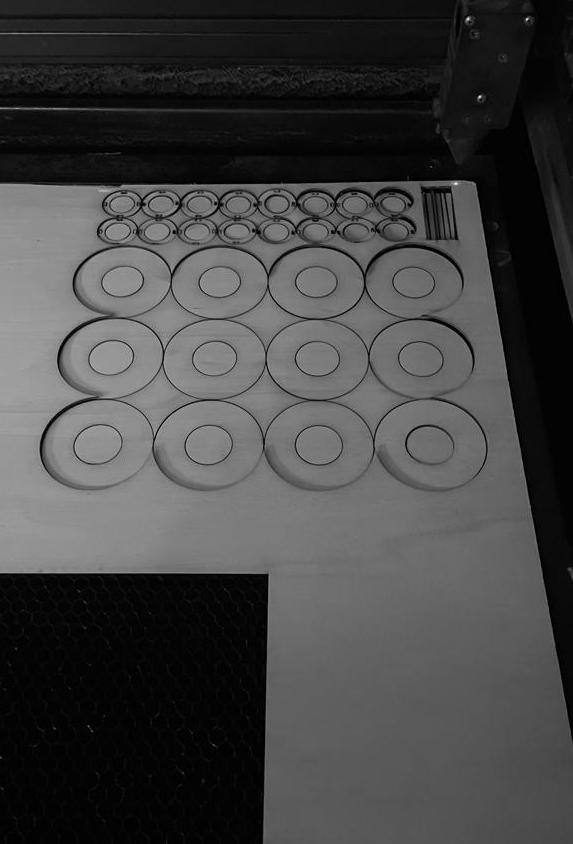
Pendent Suction to be directly replaced by glowing stick, arrangement to mimick a body structure
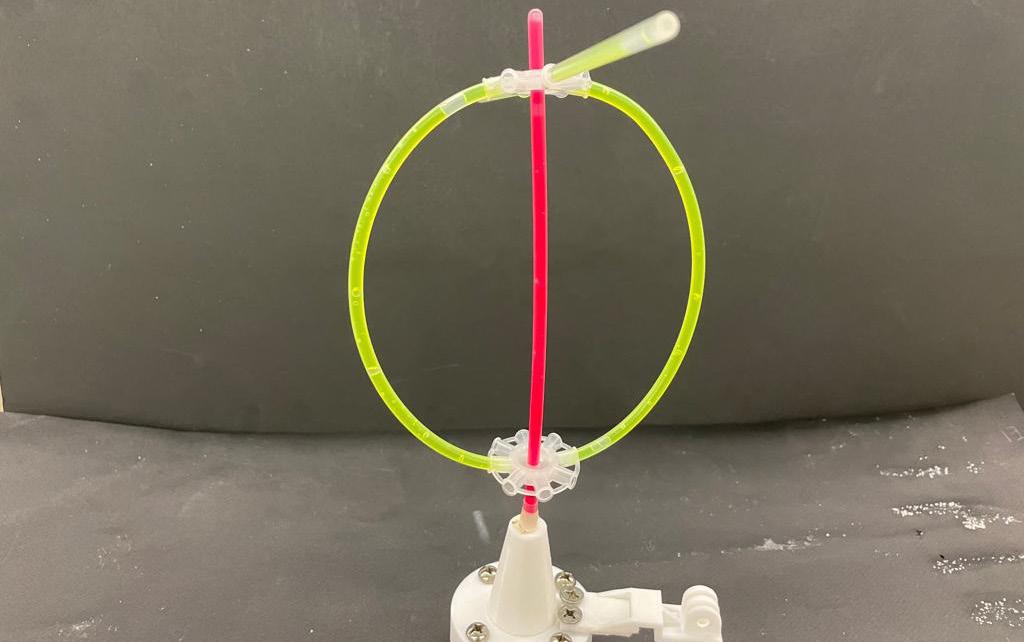
Attempt on design solution for a circumference change of the pendent suction (Bigger glowing stick)

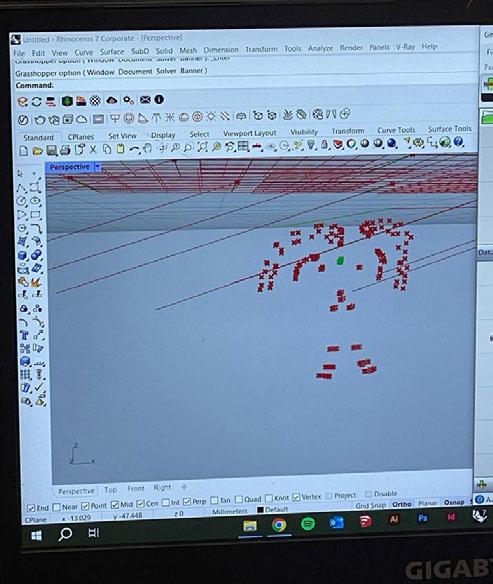
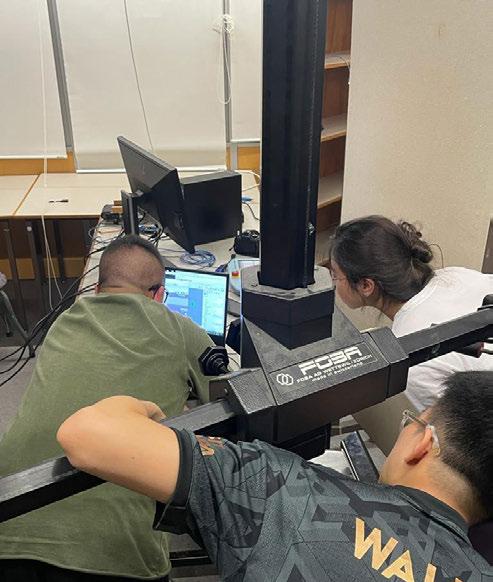
Software Realisation



Software Realisation
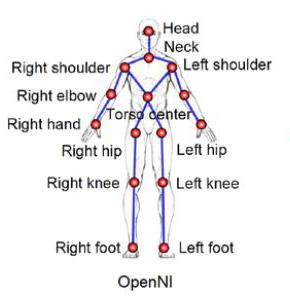
Motion Capture Requirement
 Kinect for Xbox 360 (Hardware)
Firefly - Grasshopper plug-in (Software)
Kinect for Xbox 360 (Hardware)
Firefly - Grasshopper plug-in (Software)
Software Realisation
Familiarize with software environment
Testing
 Firefly Skeletal Track Function
Testing Kinect camera with grasshopper integration
Firefly Skeletal Track Function
Testing Kinect camera with grasshopper integration
Software Realisation
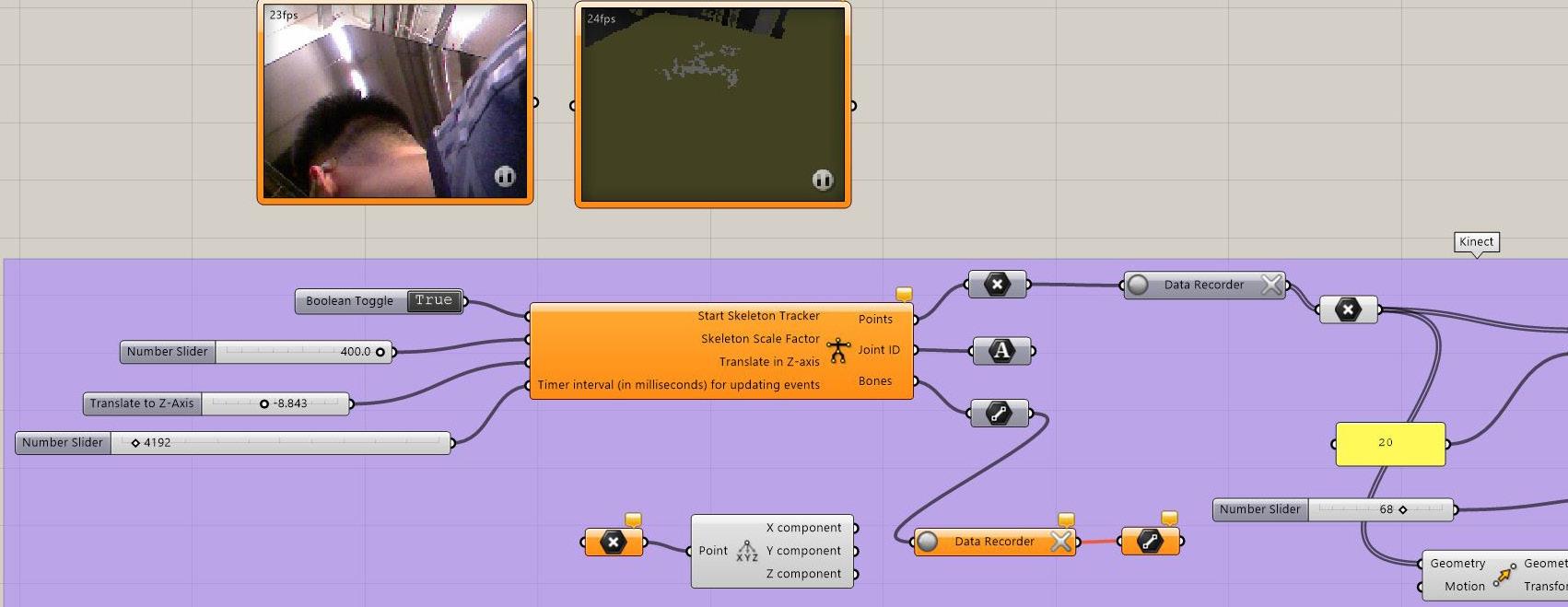
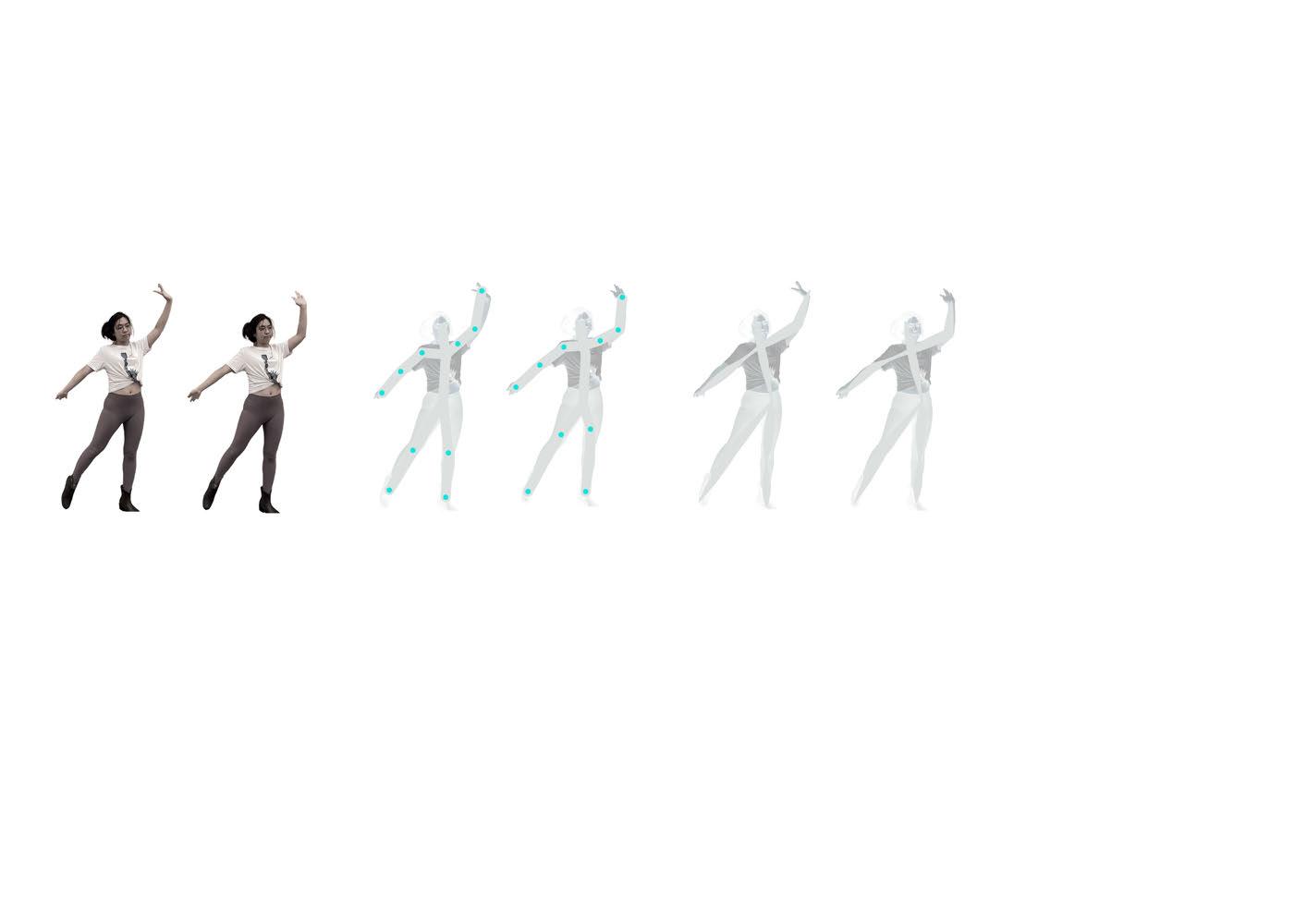
Drafting of the grasshopper script
Script Sequence 1: Identify different joints to make active and allow recording of movements
Software Realisation
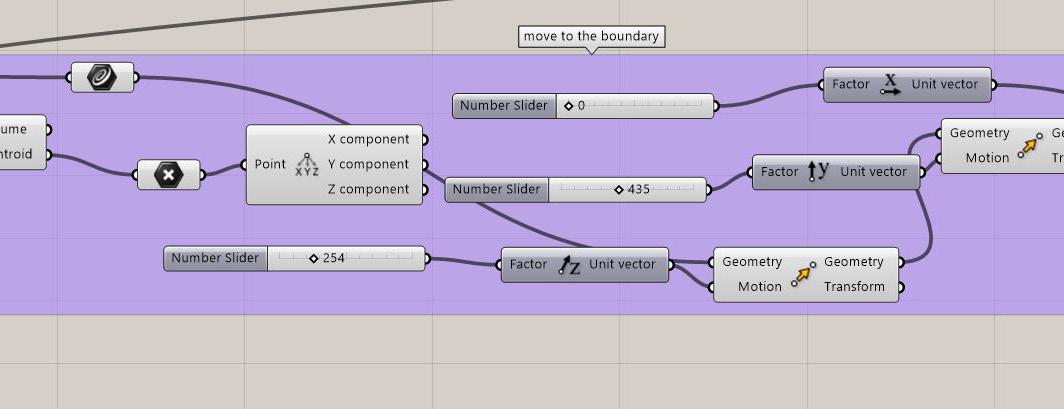 Drafting of the grasshopper script
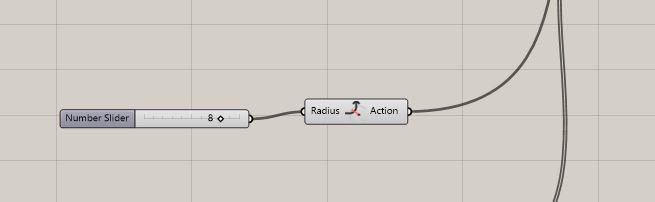
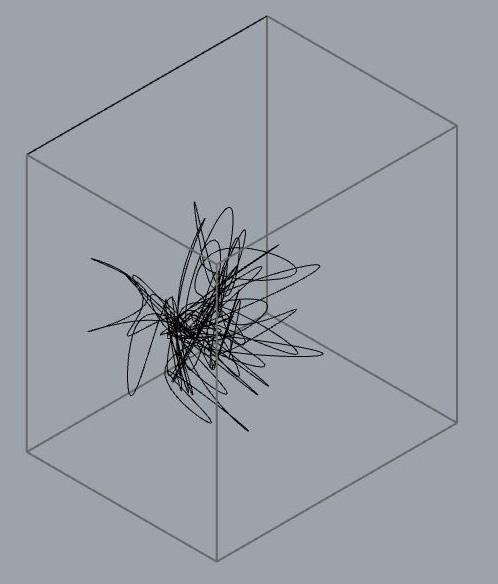
Script Sequence 2 : Mark a boundary for the robotic arm to move. ( 556 x 448 x 607)
Drafting of the grasshopper script
Script Sequence 2 : Mark a boundary for the robotic arm to move. ( 556 x 448 x 607)
Software Realisation
Recording movement into readable path
Moving with assigned joint detection
Overlaying multiple points over a course of recorded time
Software Realisation
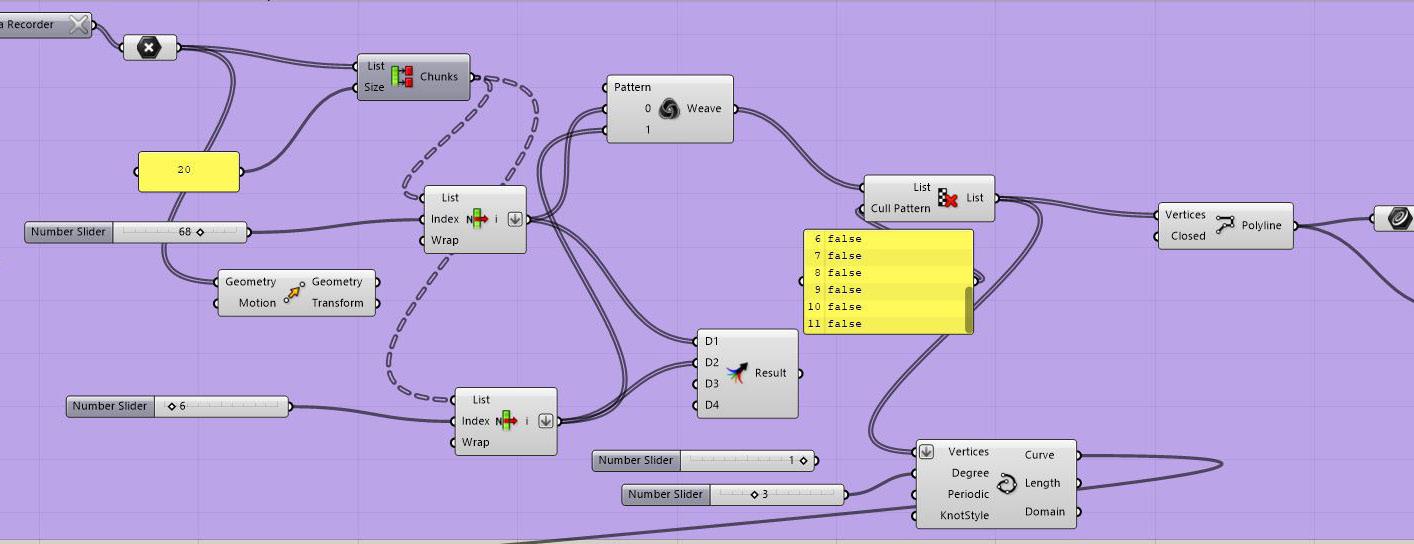
Drafting of the grasshopper script
Script Sequence 3 : Traslating multiple overlaying points into runnable lines of path for the arm to operate within a boundary
Software Realisation
Recording movement into readable path
Changed from points Into runnable lines
Software Realisation

Problem Encouterments
Free running of the lines may result in extreme turning of the arm
Software Realisation
Solutions
Reducing number of runs of the whole series of lines
Software Realisation
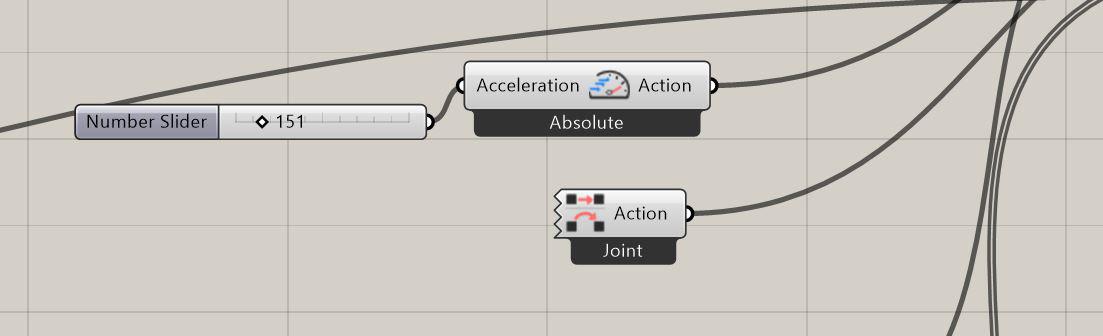
Adjusting the speed of the arm
Testing out the acceleration of the arm to be almost in sync with body movement
Record the dance movements

Generate the path of lines that are readable to the arm

Act III
Recalibrate sequence of lines and speed to avoid arm crash and sync speed with human movement

End Product I
End Product II
End Product III