
11 minute read
3.4.5 Elektro- optische en microgolf- systemen met faseverschilmeting


3.4.5 Elektro- optische en microgolf- systemen met faseverschilmeting
3.4.5.1 Werkingsprincipe
zender
ontvanger
reflector
Een continue en gemoduleerde golf wordt door het meettoestel uitgestuurd, gereflecteerd en terug ontvangen. Het faseverschil tussen de uitgestuurde en de gereflecteerde golf levert de dubbele afstand tussen meettoestel en het ingemeten punt.
De reflectie bij elektro- optische systemen gebeuren door: Een meervoudig prisma Een enkelvoudig prisma Een omnidirectioneel prisma Een mini- prisma Een reflecterend puntmerkteken Een niet- reflecterend puntmerkteken Een willekeurige wand, dak, boom, paal,…


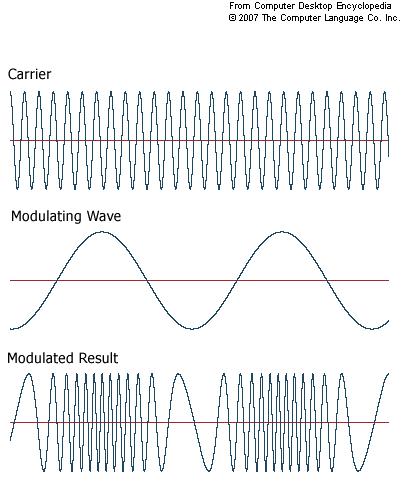
Bij microgolfsystemen gebeurt de reflectie steeds door een zender/ontvangst toestel. De methode kent een aantal varianten afhankelijk van de golflengte van de gebruikte draaggolf en van de soort modulatie (amplitude- of frequentiemodulatie).

Amplitude modulatie Frequentiemodulatie
Het elektro- magnetisch spectrum is continu vanaf het zichtbaar licht met frequenties van de orde 1014 Hz overeenstemmende met golflengten van de orde van 500 nanometer tot de lange radiogolven met frequenties van 104 HZ.

De courante instrumenten maken echter slechts gebruik van een beperkt aantal golflengten en kunnen ingedeeld worden in 3 klassen in functie van de golflengte van hun draaggolf:
A. Laag- frequente systemen met golflengten van 100 tot 1000m (frequenties: 105106 Hz). B. Microgolf- systemen met golflengten van de orde van 1 cm (frequenties: 1010 Hz) C. Systemen met zichtbaar en infra- rood licht, de zgn. elektro- optische systemen met golflengten van de orde van 500- 1000 nanometer (frequenties: 1014 HZ.).
Algemeen kan gesteld worden dat hoe lager de frequentie, hoe groter het bereik en hoe groter de penetratiekracht in de atmosfeer, doch ook hoe omvangrijker de zend- en ontvangstapparatuur en hoe minder nauwkeurig.
Dit heeft voor gevolg dat toestellen bestemd voor lucht- en zeevaart, waar het bereik belangrijker is dan de nauwkeurigheid, meestal met lage frequenties werken (klasse a of b) terwijl toestellen voor terrestrische topografie bijna steeds met hoge frequenties werken (klasse b of c). Hieronder worden daarom enkel deze laatste klassen besproken.
In het domein van de landmeetkunde wordt de hoogfrequente draaggolf gemoduleerd tot een laagfrequente meetgolf met een golflengte van enkele meter en de faseverschillen, berekend met deze laatste, worden gebruikt voor de eigenlijke afstandsmeting. Een relatief faseverschil kan bepaald worden tot op ca. 1/1000 van de golflengte.
Beschouwen we een zender die en continue en gemoduleerde golf uitstuurt, met constante frequentie en golflengte. Indien de ontvanger zich vlak tegen de zender bevindt zijn het uitgezonden en het ontvangen signaal volkomen in fase. Wordt de ontvanger op een afstand, kleiner dan de golflengte, van de zender geplaatst, dan hinkt de ontvangen golf een fase achterop t.o.v. de uitgestuurde golf, wegens de tijd die het signaal nodig heeft om zich van de zender naar de ontvanger te verplaatsen. Er bestaat bijgevolg een faseverschil tussen beide signalen dat rechtstreeks evenredig is met de afstand tussen zender en ontvanger. Dit is een relatief faseverschil.
Indien de ontvanger op een afstand exact gelijk aan de golflengte van de zender wordt opgesteld, dan zijn de uitgezonden en de ontvangen golf terug perfect in fase. Deze toestand doet zich voor telkens de afstand tussen de zender en ontvanger een geheel aantal golflengten bedraagt. Er bestaat geen rechtstreekse manier om dit geheel aantal golflengten te bepalen, aangezien alle uitgestuurde signaalgolven identiek zijn. Enkel het relatief faseverschil is bekend. Dit houdt in dat de afstand bij een enkelvoudige meting van het faseverschil wordt bepaald op een geheel aantal keren de golflengte na.
D n. . a 2
Met:
D: de afstand zender-ontvanger : de golflengte (= voortplantingssnelheid van de golven gedeeld door de frequentie) n: geheel getal 2
: het relatieve faseverschil tussen de uitgezonden en ontvangen signaal (een
reëel getal tussen 0 en 1) a: optelconstante (meestal zorgt constructeur ervoor dat a=0)
Doorgaans wordt het signaal uitgezonden en ontvangen door hetzelfde meettoestel. Daartoe wordt, bij gebruikmaking van elektro- optische golven, al dan niet een prismareflector opgesteld op het punt tot hetwelk de afstand moet worden bepaald. Het signaal reflecteert hierop en komt terug naar het meettoestel dat het signaal terug ontvangt. De afstand zender- ontvanger stemt aldus overeen met tweemaal de afstand meettoestel- prismareflector (die we L zullen noemen).
Bij microgolf toestellen gebeurt de “reflectie” op elektronische wijze. In plaats van een prisma- reflector wordt een elektronisch zend- en ontvangsttoestel gebruikt dat de ontvangen golf onmiddellijk terug verstuurt naar het oorspronkelijk meettoestel. Dit toestel ontvangt de gereflecteerde golf en bepaalt het relatief faseverschil. Ook hier wordt dus in feite tweemaal de afstand L gemeten. De onbepaaldheid inzake het geheel aantal golflengten wordt als volgt opgelost. De theoretisch meest eenvoudig oplossing bestaat er in vooraf een meting te verrichten met een golflengte, die bijvoorbeeld 1000 maal groter is dan de golflengte van de eerste meting, zodat het geheel aantal golflengten hier zeker nul bedraagt. Dit levert een ruwe maat voor de afstand. De voorwaarde is hierbij dat deze ruwe schatting voldoende moet zijn het geheel aantal golflengten van de fijne meting eruit af te leiden.
Gegeven: 2 uitgestuurde golven 1ste golf: f=15MHz =20m 2
=0,271
2de golf: f= 150kHz =2000m 2
=0,533
Gevraagd: Hoe groot is de gemeten lengte (uitgedrukt in m en met cmnauwkeurigheid)?
In praktijk worden echter vaak twee golflengten gebruikt die zeer dicht bij mekaar liggen.
Gegeven: 2 uitgestuurde golven 1ste golf: =20m 2
=0,623
2de golf: =19,9m 2
=0,963
Gevraagd: Hoe groot is de gemeten lengte (uitgedrukt in m en met cmnauwkeurigheid)?
3.4.5.2 Kenmerken van deze methode
Bij elektro- optische toestellen is het voor afstanden groter dan 100-200m steeds noodzakelijk een prismareflector te gebruiken om de golf terug te kaatsen. Door de lage energie- inhoud per tijdseenheid van de continue golf, is de hoeveelheid energie gereflecteerd door een hindernis (een muur, raam, boom) immers te klein om een meting te kunnen uitvoeren. Voor microgolftoestellen is uiteraard steeds een zend/ontvangst unit nodig om het signaal elektronisch te reflecteren.
De maximale afstand bij elektro- optische toestellen bedraagt in ideale omstandigheden 1 tot 3 km bij gebruik van een standaard enkelvoudig prisma. (diameter ca. 8-10cm).
Bij gebruik van samengestelde prisma’s wordt het bereik vergroot evenredig met de vierkantswortel van het aantal prisma’s. Het gebruik van 9 prisma’s in plaats van 1 betekent bijvoorbeeld een verdriedubbeling van de maximale afstand. Bij gebruik van mini- prisma’s (diameter ca. 2-3 cm) bedraagt het maximaal bereik 100-300m. Bij gebruik van zelfklevende reflecterende merktekens (van 2 tot 6 cm diameter) daalt het maximaal bereik tot 30-100m.
Bij reflectie op een wand is de maximale afstand van de orde van 100 tot 200 m, doch is afhankelijk van de textuur, kleur, positie van het reflecterend vlak. Lichte kleuren en vlakke texturen loodrecht op de vizierlijn veroorzaken een betere weerkaatsing dan donkere en ruwe vlakken die niet loodrecht staan op de vizierlijn. In sommige gevallen wordt de meting dan onmogelijk.
Bij gebruik van reflecterende merktekens is er tevens een minimale afstand van ca.5- 20m. Oorzaak is de micro- honinggraatvormige celstructuur van deze merktekens in combinatie met de nauwe openingshoek van de laserstraal. Deze dient op voldoende honingraatvormige cellen in te vallen om een voldoende krachtige reflectie te kunnen krijgen.
Het gebruik van zichtbaar licht als draaggolf komt weinig voor omdat hierdoor het bereik overdag sterk beperkt is, wegens de vermenging van het signaal met het gewone zonlicht. Ook nevel en mist vormen een heel sterke beperking van het bereik. Bij gebruik van een infrarood laserdiode zijn deze beperkingen veel minder extreem, doch er dient eveneens rekening te worden gehouden met een beperking van het bereik indien extreem fel zonlicht weerkaatst op warme oppervlakken (zoals bijvoorbeeld rotsen) in de omgeving van de prismareflector of indien er lichte nevel of mist aanwezig is, zoals gebruikelijk in onze streken. Het bereik kan door elk van deze factoren, die gelukkig normaal niet samen voorkomen, terug lopen tot ongeveer de helft van het normale bereik. Het naderen van de limiet uit
zich in de praktijk door een exponentiële toename van de meettijd in functie van de meetafstand of van de verslechterende klimatologische omstandigheden.
De meettijd van hedendaagse toestellen bedraagt 1 tot 5 seconden oor maximaal nauwkeurige metingen. Vaak bezitten de toestellen een “tracking”- methode waarbij verscheidene metingen per seconde mogelijk zijn, zij het met wat kleinere nauwkeurigheid.
3.4.6 Foutenbronnen
1. Typische waarden voor de fouten van hedendaagse elektro-optische toestellen, te wijten aan de elektronische kenmerken van het toestel, zijn van het type
Afstandsfout = dL = a² (bL)²
Met waarden van a gelegen tussen 1 en 3 mm en waarden van b gelegen tussen 1 en 3 ppm (parts per million of mm/km).
Bij pulsmetingen is de foutterm a te wijten aan de beperkte nauwkeurigheid waarmee het tijdsinterval kan worden gemeten gezien de gebruikte puls een zeker breedte bezit. De foutterm b daarentegen is te wijten aan de afwijking van de frequentie van de kwartsoscillator, die een schaalfout op de tijdsmeting en dus op de gemeten afstand veroorzaakt. Bij fasemetingen is de foutterm a te wijten aan de beperkte nauwkeurigheid waarmee het faseverschil kan worden gemeten. De foutterm b is te wijten aan de afwijking van de frequentie van de kwartsoscillator, die een fout veroorzaakt op de golflengte en daardoor op de gemeten afstand. Aangezien beide fouttermen in hoge mate onafhankelijk van mekaar zijn, is het correct om de vierkantswortel van de soms der kwadraten van de beide fouttermen te nemen. Toch wordt bovenstaande formule vaak vereenvoudig tot
dL = a+bL
Dit is een veilige benadering want steeds ongunstiger dan de correcte formule.
De fouten voor microgolftoestellen zijn analoog, maar de foutfactoren a en b zijn doorgaans aanzienlijk groter met typische waarden a=10mm en b= 10pp. Hun bereik loopt echter op tot maximaal 50- 100 km.
2. De brekingsindex van de atmosfeer is ster temperatuur- en drukafhankelijk.
De brekingsindex beïnvloedt rechtstreeks de voortplantingssnelheid van het licht in de atmosfeer en dus ook de tijdsmeting bij de pulsmethode en het gemeten aantal golflengten faseverschil bij de methode met continue golven (toon dit laatste aan). De tijdsmeting respectievelijk het faseverschil zijn, zoals hoger uitgelegd, rechtstreeks gekoppeld aan de berekende afstand.
Voor metingen op afstanden groter dan 100m, dient steeds rekening te worden gehouden met de temperatuur en druk van de atmosfeer ter plaatse van de meting, zeker indien deze sterk afwijken van de waarden waarvoor de afstandsmeter geijkt werd. Sommige totaalstations, voorzien van een elektronische temperatuur- en druksensor, corrigeren automatisch de gemeten afstand. Bij de meeste toestellen dient de gebruiker echter zelf de temperatuur en luchtdruk in te
tikken vooraleer het toestel deze correctie berekend. Ook kunnen de afstanden steeds achteraf worden gecorrigeerd, waarbij de correctie numeriek (cfr. Infra) dan wel ia diagrammen wordt bepaald. Zonder correctie voor temperatuur en druk, is er een bijkomende foutterm c.L waarbij c waarden kan aannemen tot 50 ppm in onze streken.
3. Met een elektronische afstandsmeter worden steeds een “schuine” of “gehelde” afstand L gemeten. Om te kunnen komen tot de horizontale of gereduceerde afstand dient de zenithale hoek te worden bepaald waaronder de afstand wordt gemeten. De herleiding tot de horizontale afstand gebeurt in een totaalstation meestal automatisch, door formule
gereduceerd L dL.sin met de zenitale hoek
Aangezien “schuine” afstanden worden gemeten die moeten worden herleid naar de horizontale, heeft een foutieve meting van de helling waaronder de afstand wordt gemeten een rechtstreekse invloed op de gereduceerde afstand.:
Uit de afleiding van bovenstaande formule volgt
gereduceerd L dL.sin L.cos .d
Uit deze formule blijkt dat de eerste term minimaal is indien de fout dL op de gemeten afstand minimaal is. Deze fout werd hierboven behandeld. Uit bovenstaande formule blijkt ook dat de fout op de meting van de zenitale hoek de gereduceerde afstand beïnvloedt, evenredig met de grootte van de afstand L en met cos . Deze fout kan bijgevolg minimaal gehouden worden door: zo horizonaal mogelijk te meten ( = /2) de fout d op de zenithale hoek zo klein mogelijk te houden
4. Voor grotere afstanden (>5km) rekening dient te worden gehouden met de invloed van de refractie. Het licht volgt immers op een gekromde baan. Wederkerige metingen zijn aan te bevelen om de refractiecoëfficiënt te kunnen berekenen.
5. Voor grotere afstanden (> 5km) dient eveneens het effect van de aardkromming in rekening te worden gebracht. Dit is evenredig met de derde macht van de gemeten afstand en wordt hierdoor niet meer verwaarloosbaar op grotere afstanden.
6. De niet- evenwijdigheid van de vizierlijn en de laserstraal kan tot fouten leiden.
Vooral bij niet coaxiale afstandsmeters kan deze fout belangrijk worden door de beperkte mechanische nauwkeurigheid van het bevestigen van de afstandsmeter op het totaalstation.
Bij coaxiale toestellen bestaat dit probleem minder op voorwaarde dat het coaxiaal zijn van de laserstraal van het toestel door de fabrikant goed is afgeregeld.
7. Bij reflectorloos metende afstandsmeters is niet steeds exact gekend op welk punt of welke hindernis de lichtpuls reflecteert. Hindernissen zoals bewegende takken kunnen voor een foutieve meting zorgen die niet altijd onmiddellijk wordt gedetecteerd. In sommige gevallen zoals een punt op de rand van een inspringende gevel kan het onduidelijk zijn op welk vlak de laserstraal reflecteert.
Bij sommige toestellen wordt een zichtbare laserstraal meegestuurd waardoor de operator kan richten zonder doorheen de oculairlens te kijken. Dit is handig en minimaliseert fouten bij zeer excentrische, lage of hoge opstellingen van het toestel.
8. Zelfs al zijn de vizierlijn en de laserstraal evenwijdig, dan bestaat bij niet- coaxiale toestellen bij hellende vizierlijn nog een fout te wijten aan het afstandsverschil tussen vizierlijn en laserstraal.




